3d_sensing_and_printing_NAC - Real
advertisement

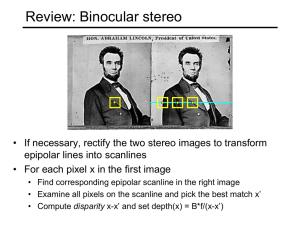
3D Sensing for 3D Printing: (because CAD is hard) Nick Armstrong-Crews July 24, 2014 Who am I? • Current: Roboticist, MIT Lincoln Laboratory – Focus: 3D perception • Past: Carnegie Mellon Robotics Institute – Focus: Planning under uncertainty • Future: Heuristic Labs – Focus: 3D sensors • Origin (fun fact): Alaska – Focus: None 3D Printer Meetup - 2 NAC 7/24/14 “Nick Armstrong-Crews” - http://www.linkedin.com/in/nickarmstrongcrews Why 3D Sensing is Important • Theme: CAD is hard; a barrier to 3D printing revolution – Imagination ---(CAD)---> digital model ---(3D printing)---> Reality – Harder than 2D (i.e., photo-realistic painting/sketching) “This stuff is really hard. It's hard to learn, hard to use, and mistakes have real consequences. This [is true] of any CAD or modeling software.” • Aside: 2D sensing sucks – Loss of depth information; loss of absolute dimensions – Simply insufficient to aid creation in a 3D world • Solution: 3D sensing to the rescue! • Caveat: 3D sensing can be noisy – But fixing up a 3D model is easier than creating! 3D Printer Meetup - 3 NAC 7/24/14 “CAD is Hard” - http://sliptonic.com/cad-is-hard/ The “Matter Remixer” 3D Printer Meetup - 4 NAC 7/24/14 “Reality Remixing” - http://bit.ly/MatterRemixerKS 3D Sensing Techniques • Principles: 𝒃 – Time-of-flight: 𝒅 = 𝒄𝒕 𝟐 , 𝜺𝒅 ~𝜺𝒕 – Stereo parallax (triangulation): 𝒅 = 𝒃𝒇 ∆𝒖 , 𝜺𝒅 ~𝒅𝟐 – Multi-view stitching (mapping, SLAM): (complicated) • Implementations: – Passive stereo vision: like humans! two cams, rigid mount, sparse and not robust and reliant on background texture – Structure-from-motion: monocular, move camera over time – LIDAR: raster scanning/spinning point detector – Active stereo vision: create own perfectly structured light 3D Printer Meetup - 5 NAC 7/24/14 “Time-of-Flight Camera – An Introduction” - http://www.ti.com/lit/wp/sloa190b/sloa190b.pdf “Triangulation (computer vision)” - http://en.wikipedia.org/wiki/Triangulation_(computer_vision) “Projected Texture Stereo” - http://www.willowgarage.com/sites/default/files/ptext.pdf “Serveo w/ Planar LIDAR” - http://april.eecs.umich.edu/magic/about/ Available Hardware Comparison Principle Cost Resolution DepthSense ToF $299 640x480, +-3cm at 3m kinda Kinect (Xbox One) ToF $399 520x240 kinda Xtion / Kinect (original) ToF $99-$150 640x480, +-2cm at 2m PrimeSense inside Cubify Sense Active Stereo $399 640x480, +-2cm at 2m PrimeSense inside Occipital Structure Active Stereo $379 640x480, +-2cm at 2m Yes (tablet) Apple-only, PrimeSense inside Google Project Tango Active Stereo $1024 640x480, +-2cm at 2m Yes (tablet/phone) Limited release, preproduction HL LazeeEye Active Stereo $75 3D Printer Meetup - 6 NAC 7/24/14 “LazeeEye: Turn your Smartphone into a 3D Camera” - http://kck.st/1gVCcrB Mobile? Yes (phone) Outdoors? Yes Caveats Windoze 8.1 Pre-production Useful Resources • Structure-from-Motion – AutoDesk 123D Catch - http://www.123dapp.com/catch – VisualSfM - http://ccwu.me/vsfm – Seene iPhone App - http://seene.co • DIY – DIY Structured Light - http://mesh.brown.edu/byo3d/source.html – DIY Stereo Cams http://wiki.ros.org/camera_calibration/Tutorials/StereoCalibration (any cam pair, but recommend PS4 Eye or dual PS3 Eyes) • Computer-assisted 3D Editing – Meshlab - http://meshlab.sourceforge.net – AutoDesk Meshmixer - http://meshmixer.com 3D Printer Meetup - 7 NAC 7/24/14