ELIN - Energimyndigheten
advertisement

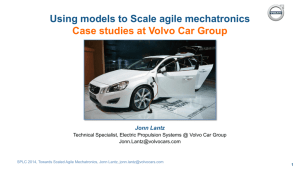
ELIN efficient ELectric drive INverter control ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 1 The Automotive challenge Mechanics Power Electronics Automotive mechatronics Power Mechatronics engineering Volvo Car Group – Green, safe, premium cars! Climate change; new legislations (often regional) … Exponential increase of software in cars… “80% of all new innovations in automotive are software” Modern cars are product lines of complex distributed software in moving, safety critical, (high voltage) volume mechatronics. Software A trinity for sustainable automotive business!? ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com ELIN Create a research and development platform in the context of electric drive, to achieve 1. more efficient electric propulsion and 2. more efficient development of electric propulsion 2 Software Center Mission: Improve the software engineering capability of the Nordic Software-Intensive industry with an order of magnitude Theme: Fast, continuous deployment of customer value Success: Academic excellence Success: Industrial impact ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 3 Background: The Automotive challenge Working with embedded software? Then you are 20 years behind!? Why? A modern premium car can have about 100 ECUs (embedded computers) working in a complicated network So, the system is not 20 years behind! Can we solve this? What will be required in the (near) future? How fast must we get? ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 4 R&D on mechatronics ELIN: allow research and development on the same platform! Make software developers out of domain experts! VCC invest in MDE Researchers To learn about and develop on a system, we must control the software! VCC invest in in-house Developers development Software models Controller (ECU) Power supply, Network,… Plant Models Environment models Device Supplier(s) ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 5 ELIN, piece for piece VCC: engineering and demonstration vehicle Construction of control software in-house (enabler for more advanced control), construction of test vehicle with new inverter. - Model driven development - Inverter ECU construction (DSPACE environment with quasi AUTOSAR platform) - HIL-test - Mechanical construction and test (one V60-hybrid is modified) CTH: research and rig test Applied research on motor control - Model driven research (sharing models!) - PWM algorithm design for efficient drive - Rig construction and test - Noise measurements etc. ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 4 triax for blocked force 8 mics for Lw 6 ELIN, status 2014-10-08 We have a 10 month delay. ELIN will finish in summer 2016 Andreas (PhD candidate) has published 2 papers [1,2] and built one lab rig. Hence, great progress at CHT. Niklas (VCC engineer) has developed an AUTOSAR application layer for the ELIN-inverter. So far only tested in MIL (model based) and currently being tested in HIL (picture). We have struggled a lot with choosing inverter for ELIN, Tier1:s do not always see benefits in this kind of research… Solution: we use a dSPACE rapid prototyping-ECU and place this in the car combined with a new inverter hardware. The demonstrator (vehicle) is currently being tested. The dSPACE ECU is on line, but the inverter and integration in the car remains. Thus, good progress at VCC (according to plan) Rig test -10 kHz, 20 Nm Road test upwards driving 0-20 km/h 1) An Analysis of Inverter Switching Loss Minimization Based On Discontinuous PWM for a Salient-pole PMSM, EPE2014, Lappeenranta, Finland 2) Inverter Losses Minimization Using Variable Switching Frequency Based On Multi-objective, ICEM2014, Berlin, Tyskland ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 7 ELIN, future work (2015) Continuous Integration!! • • CTH: a new inverter will be finalized VCC: when finished, the new inverter is integrated in the ELIN vehicle When the hardware integration is done, continuous integration is possible, both for CTH and VCC! Updates and new ideas can be tested [verified] almost without any delay. Some help will be appreciated from a VCC CI team. • • CTH: continued development of the inverter control software CTH: continued research on PWM pattern optimization vs noise, etc. ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 8 Notes In line with R&D • • ELIN sw is developed exactly as the in-house AUTOSAR software in VCCs current projects. However, ELIN can be used to test more advanced MDE, more advanced Continuous Integration, etc. This is extremely valuable to VCC, and links to other research (several projects within Software center) Learning advanced industrial software control development • The CTH control software (algorithms) is developed in any way, and goes deeper (closer to hardware) than VCC is usually developing software. Integrating this in a real vehicle is a way for both CTH and VCC to learn how to optimize deeper, more holistic. This is an enabler for new innovations. ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 9 thanks! ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com 10 The Model Driven process Re-invent the classical V-model! High level reqs. System System MIL HIL short loop 24h System design tool (database) MIL (SIL) RIG CAR test HIL ECU Architecture ECU integration Simulink code gen Simulink & Simscape SW Component ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com SW Design Unit test Developed by Tier1 from requirements 11 … and in real life Vehicle ready! ECU ready! High level reqs. System RIG CAR test System design tool (database) HIL (continuous ECU-integration possible) Vehicle integrations ECU ECU integrations Simulink & Simscape SW Component ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com SW Design HW Assumptions made Assumptions verified 12 A use case: developing dog clutch control software function developers CAE developers Auto generated AUTOSAR ECU model test developers model reference library Plant model (Simscape DSL) Test bench (combined with test tool) ELIN 2014, Jonn Lantz, jonn.lantz@volvocars.com automated regression test Results: Although the first versions of the clutch model had numerous faulty assumptions, these where easy to correct – since the developers now understood the system! (U. Eliasson et. al. MODELS 2014) 13