Safe Semi-autonomous Control with Enhanced Driver Modeling
advertisement

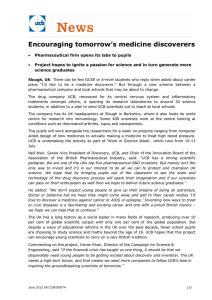
Human in the Loop Control Victor Shia TeleImmersion Lab BEARS 2012 TeleImmersion Lab Tai Chi Teaching Remote Dancing Virtual Choreography (UCB, Stanford Univ.) (UCB, UIUC) (UCB, UIUC) Portable Teleimmersion Virtual Geology Virtual Archeology (UCB) (UCB, UC Davis) (UCB, UC Merced, UC Davis) Human-in-the-Loop Control Control Theory Human input Not completely predictable In certain scenarios, can be somewhat predicted Can we develop control algorithms to keep systems safe while incorporating nominal human input? Past Work Autonomous cars Semi-autonomous cars Contributions Develop a model for the driver using data learned over time Apply this model to semi-autonomous cars and intervention Illustrate that incorporating human behavior improves the performance of a semi-autonomous architecture Vasudevan R., Shia V., et al. Safe Semi-Autonomous Control with Enhanced Driver Modeling, ACC2012 (accepted) Experimental Setup Models : Results • Model 1: current techniques (no driver modeling) • Model 2: driver model created from past actions and outside environment Model 1 Normal Model 2 Distracted Models: Metric Accuracy of prediction Precision of prediction Recall of intervention function Precision of intervention function Model 1 1 0 1 0.0031 Model 2 0.81 0.82 1 0.68 Conclusion Driver modeling can improve the performance for the semi-autonomous framework Currently implementing model learning and prediction system in real time Thank You 475 Hearst Memorial Building Demos/Poster Gregorij Kurillo Aaron Bestick Daniel Aranki Acknowledgments: NSF, NSF Grant #0903711 – CiBER-IGERT Collaborators: Yigi Gao, Andrew Gray, Theresa Lin, Prof. Francesco Borrelli