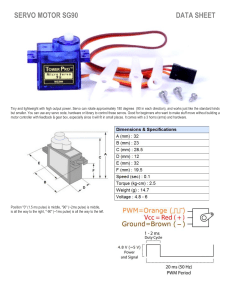
Rushikesh Chaudhari 202251113 Part 1 : Basic Servo Motor Control using Arduino IDE Objective To understand and implement the fundamental control of a servo motor using an Arduino board. The goal is to make the servo motor rotate to specific angles—0°, 90°, and 180°—in a loop using code uploaded from the Arduino IDE. Components Required: ● ESP8266 nodemcu board ● Servo motor(MG90S) ● Jumper wires ● USB cable for uploading the code ● Breadboard Circuit Connections ● Connect the red wire (VCC) of the servo to the 5V pin on the Arduino. ● Connect the brown/black wire (GND) of the servo to the GND pin on the Arduino. ● Connect the yellow/white wire (Signal) of the servo to digital pin 9 on the Arduino. This setup allows the Arduino to send PWM signals to control the servo motor's position Arduino Code: Output In Serial Monitor : Conclusion : The servo motor successfully rotates to three distinct positions in a loop: ● 0° (leftmost position) ● 90° (center position) ● 180° (rightmost position) Each position is held for 1 second before moving to the next, demonstrating basic position control using Arduino code. This confirms that the servo responds correctly to PWM signals sent from the Arduino. Part 2: Creating a Servo Control with Angle Selection Objective To create an interactive system where a potentiometer is used to manually control the angle of a servo motor. The servo responds in real-time to changes in the potentiometer's position, allowing angle selection between 0° and 180°. Components Required: ● ● ● ● ● ● Arduino Uno board Micro servo motor (MG90S / SG90) Potentiometer Jumper wires USB cable for uploading code Breadboard Circuit Connections ● Connect the red wire (VCC) of the servo to the 5V pin on the Arduino. ● Connect the brown/black wire (GND) of the servo to the GND pin on the Arduino. ● Connect the yellow/white wire (Signal) of the servo to digital pin 9 on the Arduino. ● Connect one outer pin of the potentiometer to 5V. ● Connect the other outer pin of the potentiometer to GND. ● Connect the middle pin of the potentiometer to analog pin A0 on the Arduino. This setup allows the potentiometer to act as an analog input device, controlling the angle of the servo motor through mapped values. ● 60 degree Angle ● 90 degree Angle ● 120 degree Angle ● 180 Degree Angle Conclusion: This part of the experiment successfully demonstrates how a servo motor's position can be dynamically controlled using a potentiometer as an input device. ● The servo motor responded accurately to changes in the potentiometer position. ● Real-time feedback was observed in the serial monitor. ● This implementation simulates interactive angle control systems used in various real-world applications such as robotic arms, analog gauges, and precision controls. Part 3 : Controlling a Servo Motor Over WiFi Objective The aim of this experiment is to control a servo motor remotely over WiFi using the ESP32 microcontroller. The experiment demonstrates both basic servo motor control and an advanced application — a speedometer simulation — through web-based interaction. Simulation Platforms Used ● Wokwi: Utilized for simulating WiFi-enabled projects due to its support for ESP32 and networking features. ● Tinkercad: Initially used for Arduino-based servo control, but it lacks support for WiFi-based ESP32 simulations. Hardware & Components ● ● ● ● ● ESP32 Development Board Servo Motor (SG90 or similar) Breadboard and jumper wires Potentiometers (2 units) Power Source (via USB or battery if using real hardware) Experiment Setup Servo Motor Wiring ● Signal (Orange/Yellow) → GPIO D5 (ESP32 Pin GPIO14) ● VCC (Red) → 3.3V ● GND (Brown/Black) → GND Code Files and Their Roles 1. Sarvo.ino –Main ESP32 Program The core program running on the ESP32. Functions include: ● ● ● ● Connecting to WiFi Running a local web server Handling HTTP requests from a browser interface Controlling the servo angle based on user input from the web UI 2. Index.h — Web Interface (HTML + JavaScript) ● Contains HTML + JavaScript code for a circular dial interface. ● The dial UI allows real-time servo angle control through the browser. ● Embedded in main.ino using #include "index.h". ● .wokwi-lib.json file — Dependency Declaration Output Once the ESP32 successfully connects to the WiFi network (Wokwi-GUEST in this case), it will print a message in the Serial Monitor, including: ● Connection Status - Successful we can see IP Address Clearly