IET Electric Power Applications
Research Article
Effective approach for calculating critical
speeds of high-speed permanent magnet
motor rotor-shaft assemblies
ISSN 1751-8660
Received on 29th September 2014
Revised on 4th June 2015
Accepted on 17th June 2015
doi: 10.1049/iet-epa.2014.0503
www.ietdl.org
Ziyuan Huang ✉, Bangcheng Han
Science and Technology on Inertial Laboratory, Beihang University, Beijing, People’s Republic of China
✉ E-mail: huangziyuan212@163.com
Abstract: An effective approach is presented for large errors in calculating critical speed of rotor-shaft assembly with the
commercial finite element software, is intended to develop the discrete model of the rotor-shaft assembly by using
lumped mass method, which is supported by active magnetic bearings. The first two bending critical speeds are
analysed by optimising the flexural rigidity coefficient based on transfer matrix method. Compared with experimental
modal testing and finite element analysis, the results of the transfer matrix method are in good agreement with modal
measurement, the percentage errors of the first two bending natural frequencies are 0.21 and 2.1%, respectively.
Owing to the higher accuracy and numerical stability, the method used in this study is an effective way to calculate the
critical speed of the rotor-shaft assembly.
1
Introduction
The use of high-speed permanent magnet (PM) motor is in
continuous evolution in a number of engineering applications,
including turbocharger, aeroengine spools, electrical spindles and
fuel pumps [1]. High-speed motors have the advantages of
high-power density, low vibration, small volume, direct drive and
small moment of inertia. Therefore, those advantageous
characteristics will enable the high-speed motors to play important
roles in energy conversion, in that, reducing the weight of the
system can effectively reduce the emission of gaseous pollutants
and fuel consumption.
Flexible rotors, need exceed the critical speed, can reduce the
system weight and improve the efficiency of the system for a
given power conversion. However, the design of the flexible rotor
brings the severe requirement for accurate calculation of critical
speed and dynamic balance technology. The critical speed of the
rotating shaft has to be considered as an initial estimation
approach. When the rotor is operating under the critical speed,
the deflection becomes very large and generates violent vibration
[2]. As occurrence could be very dangerous during the machine
operation, it is necessary that the rated speed of the motor should
be far away from the critical speed in the rotor design stage of
the high-speed motor to ensure the stability and secure operation.
The critical speed analysis can enable the identification of
sensitivity level of the rotor system to each design parameter.
This will allow designers to adjust the rotor critical speeds
quickly and easily. Belmans et al. [3] studied the critical speed
of an induction motor rotor with an aluminium squirrel cage. An
accurate method was proposed by taking into account
the rotor-cage stiffness and the results were compared with the
experimental values. Arkkio et al. [4] also studied the
squirrel-cage induction machines. LaGrone et al. [5] and Gilon
[6] investigated the wound-field synchronous machines. Bailey
et al. [7] further proposed that the solid rotor hub was the only
source of stiffness. The magnets and sleeve did add some extra
stiffness to the PM motor rotor. However, they believed that this
stiffness was difficult to predict accurately. Saban et al. [8]
modelled the magnets and carbon fibre sleeve as a mass at the
appropriate distance from the centre of the shaft. They were
assumed to contribute no structural stiffness to the rotor. Their
628
results in predicting natural frequencies were lower than the
measurement. With the emergence of high-performance
computers, the computing time finite element method (FEM) has
been greatly improved, but compared with the transfer matrix
method, the time cost is still large. Advantages of the FEM can
be achieved by structural modelling and calculation of complex
shapes, but it has difficulties in addressing some parameters with
clear physical meanings. The error of contact process between the
components of the assembly is larger, the accuracy of the finite
element analysis software cannot guarantee the more complex
rotor-shaft assembly dynamics and is difficult to meet the design
requirements. Thus, in order to improve the accuracy of the
calculation, the modelling must reflect the structural
characteristics of the rotor-shaft assembly. Transfer matrix method
(TMM) was proposed by Prohl [9] in 1945 and improved by
Horner and Pilkey [10] in 1978. Many scholars already
conducted a lot of research on TMM [11–14]. The TMM has
become the most effective and mature method to analyse the
rotor critical speed. The basic principle is making four state
variables (deflection, angle, shear force and bending moment) on
the section, transferring from the first segment passed to the end
by deformation compatibility condition between adjacent
segments. The advantage that the stiffness matrix, quality matrix
and gyroscopic matrix for the entire system are not required
compared with the FEM. Specifically, the order of TMM does
not increase with the degree of freedom in system. Hence, it can
be easy to program, small memory requirement, fast computing
speed. More importantly, for the rotor assembly such as chain
system, TMM can easily adjust the elastic modulus, moment of
inertia, section moment of inertia of the rotor component so as to
realise adjust stiffness of rotor assembly which is contribution by
assembly components.
In this paper, the rotor dynamical model of the 100 kW high-speed
PM motor is developed by discretisation of the rotor-shaft assembly
with elastic support. By utilising the TMM, the critical speed is
analysed based on the optimisation of the flexural rigidity
coefficient method. The critical speed analysis results are verified
by modal testing and compared with the FEM. The
aforementioned analysis, therefore, can provide the theoretical
foundation for the control system design, safe and stable operation
of the motor.
IET Electr. Power Appl., 2015, Vol. 9, Iss. 9, pp. 628–633
& The Institution of Engineering and Technology 2015
2.1 Support characteristics of active magnetic bearings
(AMBs)
To make the rotor reach a high speed, the use of non-contact
magnetic bearing or air bearing is required. First the rotor critical
speed analysis needs to study the support characteristics of
rotor-bearing system. According to the electromagnetic theory, the
resultant force between a pair of magnetic poles in a magnetic
bearing can be described as follows [15]
m AN 2
F= 0
4
I0 + ix
s0 − x
2
I − ix
− 0
s0 + x
2 Fig. 1 Shaft segment discrete with different sectional dimensions
(1)
where μ0 stands for the magnetic permeability of vacuum, N is turns
per coil of magnetic bearing, A is the pole area, s0 is the air-gap
length, I0 is the quiescent bias current, ix is the control current, and
x is the rotor displacement.
Displacement stiffness coefficient of the AMB is
kx = m0 AN 2 I0 /s30
(2)
Linear bearing stiffness of the magnetic bearing is
kopt = m0 AN 2 I0 cos2 a/s30
(3)
Taking into account the stiffness of the AMB in x, y direction is not
completely different, the coupling is weak. In the calculation of the
rotor-bearing system critical speed, the effects of damping can be
ignored, and can also be considered to be an isotropic elastic
support bearing, then the critical speed of the rotor can be
analysed within a plane.
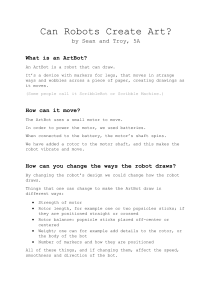
2.2
Principle of mass discretisation of the rotor
In the rotor dynamics, the elastic shaft of quality continuous
distribution is often simplified into the multi-degree-of-freedom
system with a number of lumped masses. Specifically, the rotor is
discretised into N shaft segments along the axis direction.
According to the invariant centroid theory, the moment of inertia
and the mass of each shaft segment can be lumped onto both ends
of the shaft segment to constitute a rigid disc. The shaft segment
itself is simplified into a massless elastic beam of uniform section
as shown in Fig. 1. For the high-speed PM motor rotors, the
stepped shaft can be usually simplified into different shaft
segments with s cross-sectional dimension.
According to the invariant centroid theory, the mass of the rigid
disc lumped on both ends of the shaft is
⎧
s
mla k
⎪
R
⎪
⎪
=
m
⎪ i
⎨
Li
k=1
⎪
ml(Lj − a)
s
s ⎪
⎪
k
⎪
⎩ mLi =
=
ml k − mRi
Li
k=1
k=1
(4)
where μk and lk (k = 1, 2, …, s) are the per unit mass and length,
respectively. ak(k = 1, 2, …, s) is the distance from centroid to the
left end cross-section, Li is the total length.
According to the principles of the constant of moment of inertia
(see (5))
Since the moment of inertia and the square of the distance are
inversely proportional
⎧
2
L 2
R
⎪
⎨ Jpk
ak = Jpk
lj − ak
2
⎪
⎩ J L a2 = J R l − a
dk k
dk j
k
(6)
By combining (5) with (6), the moment of inertia of the rigid disc
lumped on both ends of the massless elastic beam can be derived as
⎧
s
⎪
a2k
⎪
R
⎪
=
J
⎪
2 jpk lk
pi
⎪
⎪
k=1 a2k + Li − ak
⎪
⎪
⎪
2
⎪
⎪
s
⎪
Li − ak
⎪
L
⎪
⎪
J
=
j l
⎪
⎨ pi k=1 a2 + L − a 2 pk k
i
k
k
s
⎪
a2k
1 3
⎪
R
⎪
J
=
m
l
−
m
la
L
−
a
j
l
+
⎪
i
⎪
⎪ di k=1 a2 + L − a 2 d
12
⎪
k
i
k
⎪
k
⎪
⎪
2
⎪
⎪
s
L
−
a
⎪
1
i
k
3
⎪
⎪ JdiL =
2 jd l + ml − mla Li − a
⎪
⎩
12
k=1 a2k + Li − ak
k
(7)
where jpk and jdk are the polar moment of inertia and the diameter of
inertia per unit length of elastic shaft segment, respectively. The
lumped mass and the lumped moment of inertia at node i can be
described as follows
⎫
Mi = Mi(d) + mLi + mRi−1 ⎪
⎬
R
Jpi = Jpi(d) + JpiL + Jp,i−1
R
Jdi = Jdi(d) + JdiL + Jd,i−1
(8)
⎪
⎭
where Mi, Jpi and Jdi are the mass, polar moment of inertia and
diameter of inertia at the ith node, respectively, Mi(d) , Jpi(d) and Jdi(d)
are the mass, polar moment of inertia and diameter of inertia from
attached components (such as impeller, locating sleeve, motor PM,
AMB etc.) lumped at the ith node.
For the motor rotor, the ith shaft segment can be simplified into the
massless elastic beam with uniform section. Taken s = 1, ak = (l/2),
then (4)–(6) can be expressed as
mRi =
JpiR =
1 j l ,
2 p i
1 ml i ,
2
JpiL = JpiR ,
mLi = MjR
JdiR =
⎧
L
R
⎪
⎪
k
⎨ Jpk + Jpk = Jpk − jpk l
2
m
m k lk a k 1
l
a
2
R
L
k k k
⎪
= Jdk = jdk lk + mk lk3
a
+
J
+
l
−
a
m
l
−
J
+
⎪
j
k
k
k
k
dk
dk
⎩
12
lj
lj
1
1
J d l − ml 3
2
6
i
(9)
(10)
(5)
IET Electr. Power Appl., 2015, Vol. 9, Iss. 9, pp. 628–633
& The Institution of Engineering and Technology 2015
629
17518679, 2015, 9, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/iet-epa.2014.0503 by Nat Prov Indonesia, Wiley Online Library on [14/07/2024]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
2 Rotor system dynamics modelling of
high-speed PM motor
⎧
1 1 ⎪
⎪
Mi = m(i d) + ml i + ml i+1
⎪
⎪
2
2
⎪
⎪
⎨
1 1 (d )
Jpi = jpi
+
jp l +
j l
i
2
2 p i+1 ⎪
⎪
⎪
⎪
1
1
1
1
⎪
(d )
⎪
jd l − m l 3 +
jd l − m l 3
⎩ Jdi = Jdi +
2
12
2
12
i
i−1
Now, (13) and (14) can be written in the matrix form as
{z}Ri = [D]i { z}Li
⎡
⎢
⎢
[ D] i = ⎢
⎣
Zi = [ X
u M
Q ]Ti
(12)
The lumped discs and beams model of the discrete rotor system
between the (i − 1)th and (i + 1)th nodes are shown in Fig. 2. The
rigid disk is supported by a spring, with the stiffness Kj.
Using the D’Alembert’s principle, see D’Alembert [16], two
generalised force coordinates of rigid disks can be derived as
QRi = QLi + mi v2 xi − Kj xi
MiR = MiL − (Jd − Jp )i v2 ui
(13)
1
0
0
mv 2 − K j
0
1 Jp − Jd v2
0
⎤
0 0
0 0⎥
⎥
1 0⎥
⎦
0 1 i
(16)
Similarly, the massless elastic beams can be also written in the
matrix form as
{z}i+1 = [B]i { z}′i
(17)
where [B]i is the transfer matrix of the massless elastic beams
Lumped mass modelling of the rotor-shaft assembly
Very often, rotors are considered as beam-like systems and then
modelled by using beam elements. The rotor system is lumped on
a number of rigid disks, connected to each other by massless
beams (fields) to ascribe the elastic properties of the structure.
Since the rotor system possesses axial symmetry, a similar
approach with complex coordinates in four degrees-of-freedom
rotors can be used. Each end of a field can be grouped into two
complex coordinates (displacement X and rotation θ) and two
generalised force coordinates (shear force Q and bending moment
M). The state vectors are of order four for the ith section
(15)
where [D]i is the transfer matrix of the rigid disks
Critical speed analysis of rotor-shaft assembly
The rotor-shaft assembly of the high-speed PM motor is composed
of the PM, sleeve, locating ring, impeller etc. The fit relationships
of these components onto the shaft are both interference and
clearance. The elastic modulus E and section moment of inertia I
need to be updated for different fit relationships when analysing
the bending modes of rotor assembly by use of the lumped mass
method.
3.1
(14)
xRi = xLi = xi
(11)
Under the premise of ensuring the accuracy, the number of lumped
discs should be as small as possible and can be selected according
to the following empirical formula N ≥ 1 + 5.34r, where r is the
highest order of the natural frequency which is required to calculate.
3
uRi = uLi = ui
l2
1
l
⎢
2EI
⎢
⎢
l
[B ]i = ⎢
⎢0 1
⎢
EI
⎣0 0
1
0 0
0
⎡
⎤
l3
(1 − n) ⎥
6EI
⎥
⎥
l2
⎥
⎥
⎥
2EI
⎦
l
1
i
(18)
where the shear influence coefficient v = 6EI/(aGAl 2), a is a factor
related to the cross-section shape, for the hollow circular section, a
is taken as 2/3; for the solid circular section, a is taken as 0.886.
G is the shearing modulus of elasticity, and A is the
cross-sectional area. In order to reduce the computing time, the
rigid disk and the massless elastic beam are often joined as a
single component. The transfer matrix of the component can be
written as (see (19) at the bottom of the next page)
It is clear that the transfer matrix is associated with ω. If there is no
elastic supporting on the rigid disk, Kj should be taken as zero.
In this paper, taking 100 kW, 32,000 rpm rotor-shaft assembly
model of high-speed PM maglev motor supported by AMBs as an
example, material properties of the rotor-shaft assembly are as
shown in Table 1. The rotor model of lumped mass at which the
AMB is simplified into two elastic supports and located in nodes
(8) and (17), can be discretised as 23 fields and 24 disks as shown
in Fig. 3. The order of the fields from left to right is numbered
consecutively 1–23. The order of the disks from left to right is
numbered consecutively 1–24.
The transfer relationship between the ith node and (i + 1)th node
can be expressed as
{Z }i+1 = [T ]i {Z }i
(20)
where transfer matrices [T]i are four-dimensional matrices.
Table 1 Material property of rotor components
Fig. 2 Forces and moments model of the ith node and field with elastic
support
630
Component
Material
Elasticity
modulus E, GPa
Density ρ,
kg/m3
Poisson
ratio
shaft
sleeve
PM
locating ring
radial AMB
40CrNiMo
GH4169
Sm2Co17
1Cr18Ni9Ti
silicon steel
184
199
100
184
206
7850
7800
8400
7900
7650
0.3
0.3
0.3
0.3
0.3
IET Electr. Power Appl., 2015, Vol. 9, Iss. 9, pp. 628–633
& The Institution of Engineering and Technology 2015
17518679, 2015, 9, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/iet-epa.2014.0503 by Nat Prov Indonesia, Wiley Online Library on [14/07/2024]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
Two complex coordinates are
Then (8) can be simplified as
angular velocity, rad/s
frequency, Hz
Fig. 3 Lumped mass modelling of 100 kW PM motor rotor-shaft assembly
The recurrence relation of the discrete rotor model between each
section and initial section can be expressed as
⎡
t11
⎢ t21
[ A]i = [T ]i [T ]i−1 · · · [T ]2 = ⎢
⎣ t31
t41
(i = 1, 2, . . . , N )
3.2
t12
t22
t32
t42
t13
t23
t33
t43
⎤
t14
t24 ⎥
⎥
t34 ⎦
t44
(21)
Critical speed calculation of rotor-shaft assembly
The finite element analysis software has the advantage of precise
critical speed calculation for a single shaft. In this paper, two
different FEM models are applied in order to study which one is
played as a decisive role in rotor bending modes. The first FEM
model is the shaft without any components such as radial AMB,
motor PM, sleeve etc. Considering the critical speed calculation
has high precision for the single shaft by use of the FEM. The
results are used to amend the shape parameter of the cross-section
of the TMM. The second FEM model is the consideration of the
motor rotor-shaft assembly which has different components onto
the shaft. Correspondingly, the precise calculation of critical speed
of the rotor assembly can be achieved by the TMM. For the
high-speed PM motors, both ends of the rotor are free–free
boundary condition, frequency equation can be obtained as
t
D v2 = det 31
t41
t32
t42
= t31 t42 − t41 t32 = 0
(22)
The calculation of the shaft critical speed is executed using the
Matlab software programming. Set the frequency search from 0 to
Cylindrical
Conical
First
bending
Second
bending
197.5
31.4
311.1
49.5
5127.3
816.5
13,087
2083.9
20,000 rad/s, the step size of frequency search which is satisfaction
of the boundary condition is 0.01, the results of the critical speed
and angular velocity are obtained as shown in Table 2.
The mode analysis of the first FEM model is developed for the
single shaft using finite element software Ansys. Meshing size is
5 mm, obtained nodes 57,509 and elements 33,084. Solving the
aforementioned model gives the first two bending natural
frequencies as shown in Fig. 4.
The test results of first two bending modes of the single shaft are
742 and 1790 Hz, respectively. The FEM is verified to be in good
agreement with experimental modal testing. Here, using the TMM,
by adjusting the shear effect coefficient to optimise the natural
frequency, the first two bending natural frequencies are 750.1 and
1818.5 Hz after adjusting the coefficient, respectively. The errors
are 1 and 1.5%, respectively.
Likewise, the mode analysis of the second FEM model for the
rotor-shaft assembly is conducted at 100 kW motor using finite
element software Ansys. Meshing size is 5 mm, obtained nodes
171,550 and elements 72,073. The first two bending natural
frequencies can be obtained as shown in Fig. 5.
The experiment modal analysis of the rotor-shaft assembly for
100 kW high-speed PM motor is carried out to verify feasibility of
modal calculation of the TMM. The rotor is hung vertically to
simulate free–free boundary conditions. The impact hammer is
used to knock the rotor-shaft assembly where four acceleration
sensors are attached on the rotor as shown in Fig. 6. Fig. 7 shows
one of the four sensor output signals in time domain and the fast
Fourier transformation spectrum for the rotor-shaft assembly. The
spectrum has clear peaks for the first two bending natural
frequencies 670 and 1543 Hz, respectively. The first two bending
natural frequency errors are 78 and 37%, respectively, by use of
the FEM. The primary cause is that the finite element software
has the significant error to address the component contact, because
of the strong contact non-linear. The software, by use of
adjustment of the contact stiffness factor (FKN), addresses the
contact between the components. The selection of the FKN value,
given by the software, ranges from 0.01 to 10. It is difficult to
guarantee the calculation accuracy. The default value of the
software of the FKN is to be 1.0, representing the physical
Fig. 4 First two bending modes of 100 kW motor shaft (first bending natural frequency 746.9 Hz; second bending natural frequency 1794.8 Hz
l3
2
⎢ 1 + 6EI (1 − n) mv − Kj
⎢
⎢
l2 2
⎢
mv − K j
⎢
[ T ] i = [ B ] i [ D] i = ⎢
2EI
⎢
⎢
l mv2 − Kj
⎢
⎣
mv2 − Kj
⎡
l2 Jp − Jd v2
2EI
l J p − J d v2
1+
EI
J p − J d v2
1+
0
l2
2EI
l
EI
1
0
⎤
l3
(1 − n) ⎥
6EI
⎥
⎥
l2
⎥
⎥
⎥
2EI
⎥
⎥
l
⎥
⎦
1
(19)
i
IET Electr. Power Appl., 2015, Vol. 9, Iss. 9, pp. 628–633
& The Institution of Engineering and Technology 2015
631
17518679, 2015, 9, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/iet-epa.2014.0503 by Nat Prov Indonesia, Wiley Online Library on [14/07/2024]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
Table 2 Results of the critical speed and angular velocity
Fig. 6 Measurement of the bending critical speeds of the rotor-shaft
assembly
meaning of bonding the components together. This will increase the
rotor system stiffness, make the emulational results of the natural
frequencies larger than the test values.
A total of 100 kW rotor-shaft assembly critical speed is performed
by using the TMM based on the discrete model. The components on
the shaft for the high-speed PM motor are all ring-like, the mass and
the moment of inertia are
Fig. 7 Out signal from the acceleration sensor and vibration spectrum
described as
dm =
⎧
1 ⎪
⎨ m = pr D2 − d 2 l
4
⎪
⎩ j = 1 mD2 + d 2 8
(23)
where D and d are the outer diameter and inner diameter of the ring, l
is length of the ring, and ρ is density of the ring material.
The mass and moment of inertia of components are lumped on the
corresponding rigid discs. Without changing flexural rigidity (EI),
the first two bending natural frequencies are 633.5 and 1420 Hz,
respectively, which are smaller than the test values, the errors are
5.4 and 7.9%, respectively. These errors result from unchanged EI,
it means no consideration of elasticity modulus of the component,
but only the contribution of mass to the rotor-shaft assembly. This
can lead to the decrease of the stiffness of the rotor-shaft assembly
and the lower natural frequency. In order to optimise calculation
results, the flexural rigidity (EI) should be changed properly. The
change of cross- sectional moment of inertia I can be realised by
the method of equivalent mass diameter. For the high-speed PM
motor rotor-shaft assembly, the equivalent mass diameter can be
d 2 + 4m′ / prl
(24)
where d is the outside diameter of shaft, m′ is the mass of
components, and ρ is the density of shaft. Substituting the
component of shaft into (24), it is calculated that d8 = 89.2 mm,
d9 = 89.2 mm, d15 = 89 mm. Table 3 shows the results of first two
bending modes by using different methods for 100 kW motor
rotor-shaft assembly. For the flexible rotor, the working speed
should be kept in the range of 1.4n1 < n < 0.7n2 [17], where n1 and
n2 are first bending and second bending critical speeds,
respectively. An accurate calculation of the critical speed in the
design phase is the key to ensure the flexible rotor through the
bending critical speed and stable operation. For the rigid rotor,
when the motor operates at the maximum power, the first bending
critical speed should be 10% higher than the rated speed [18]. In
particular, for the ball-bearing configuration, the first
forward-bending mode falls more than 20% above the overspeed
of the machine. Where overspeed n′ = 1.2nN, nN being the rated
speed [19].
E is the shaft elasticity modulus, without consideration of the
shrink fit component elasticity modulus; E* is the elasticity
Table 3 Different method of critical speed calculation for 100 kW rotor-shaft assembly
Mode
first bending, Hz
second bending, Hz
632
TMM (EI optimising)
(E,I)/error, %
(E*,I)/error, %
(E*,I*)/error, %
(E*,Im)/error, %
672.1/0.3
1578.9/2.3
671.4/0.2
1576.3/2.2
659.7/1.5
1529.4/0.88
671.5/0.2
1576.6/2.1
FEM/error, %
Measured
1194.4/78
2118.9/37
670
1543
IET Electr. Power Appl., 2015, Vol. 9, Iss. 9, pp. 628–633
& The Institution of Engineering and Technology 2015
17518679, 2015, 9, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/iet-epa.2014.0503 by Nat Prov Indonesia, Wiley Online Library on [14/07/2024]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
Fig. 5 First two bending modes of 100 kW motor rotor-shaft assembly (first bending natural frequency 1194.4 Hz; second bending natural frequency 2118.9.8
Hz)
4
Conclusion
This paper focuses on the rotor-shaft assembly critical speed analysis
of high-speed PM motors. The model of rotor-bearing system with
elastic support is established, the rotor-shaft assembly is modelled
as a discrete lumped element. The first two natural frequencies are
671.5 and 1576.6 Hz, by using optimisation of the flexural rigidity
coefficient and the equivalent mass diameter method. They are in
good agreement with the modal testing results. The TMM, with
high precision, good numerical stability, easy adjustment of
structural parameters, easy realisation by computer, is an effective
analysis method for the rotor-shaft assembly of high-speed PM
motors. The bending modes of the rotor-shaft assembly of
high-speed PM motor are mainly determined by the single shaft.
The contribution of the mass of the components to the bending
modes is greater than stiffness. However, the need for an
analytical calculation of the mass and moment of inertia to each
field of the rotor makes a significant calculating workload. The
programmed calculation of the lumped mass and moment of
inertia should be performed in the next study.
The approach proposed in this paper can be applied to estimate the
rotor-shaft assembly critical speed of other similar equipment
precisely, such as turbine rotor and aircraft engine rotor etc. This
work is significant in structure design with reasonable dynamic
property. Furthermore, the anisotropy, damping, temperature and
gyroscopic effect should be considered for the influence on the
critical speed of the rotor-shaft assembly in the future work.
5
Acknowledgments
This work was supported by the National Major Project for the
Development and Application of Scientific Instrument Equipment
of China under grant 2012YQ040235.
6
References
1 Boglietti, A., Gerada, C., Cavagnino, A.: ‘High speed electrical machines and
drives’, IEEE Trans. Ind. Electron., 2014, 61, (6), pp. 2943–2945
2 Tenconi, A., Vaschetto, S., Vigliani, A.: ‘Electrical machines for high-speed
applications: design considerations and tradeoffs’, IEEE Trans. Ind. Electron.,
2014, 61, (6), pp. 3022–3029
3 Belmans, R., Heylen, W., Vandenput, A., et al.: ‘Influence of rotor-bar stiffness on
the critical speed of an induction motor with an aluminium squirrel cage’, Proc.
Inst. Electr. Eng. B, 1984, 131, (5), pp. 203–208
4 Arkkio, A., Jokinen, T., Lantto, E.: ‘Induction and permanent-magnet synchronous
machines for high-speed applications’. Proc. Eighth ICEMS, 2005, vol. 2,
pp. 871–876
5 LaGrone, S.C., Griggs, M.C., Bressani, M.: ‘Application of a 5500 rpm high speed
induction motor and drive in a 7000 hp natural gas compressor installation’. Proc.
39th Annual Petroleum and Chemical Industry Conf., 1992, pp. 141–146
6 Gilon, D.C.: ‘Design and tests of a 6-MW, 10,000 rpm induction motor’. Proc.
Fifth Int. Conf. on Electrical Machines and Drives, 1991, pp. 6–10
7 Bailey, C., Saban, D.M., Pinto, P.G.: ‘Design of high-speed direct-connected
permanent-magnet motors and generators for the petrochemical industry’, IEEE
Trans. Ind. Appl., 2009, 45, (3), pp. 1159–1165
8 Saban, D.M., Bailey, C., Gonzalez-Lopez, D., et al.: ‘Experimental evaluation of a
high-speed permanent-magnet machine’. Proc. 55th IEEE PCIC, September 22–24
2008, pp. 1–9
9 Prohl, M.A.: ‘A general method for calculating critical speeds of flexible rotors’,
J. Appl. Mech., 1945, 12, (3), pp. A-142–A-148
10 Horner, G., Pilkey, W.D.: ‘The Riccati transfer matrix method’, J. Mech. Des.,
1978, 100, (2), pp. 297–302
11 Lund, J.W., Wang, Z.: ‘Application of the Riccati method to rotor dynamic analysis
of long shafts on a flexible foundation’, J. Vib. Acoust., 1986, 108, (2), pp. 177–181
12 Gasch, R.: ‘Vibration of large turbo-rotors in fluid-film bearings on an elastic
foundation’, J. Sound Vib., 1976, 47, (1), pp. 53–73
13 Friswell, M.I., Garvey, S.D., Penny, J.E.T., Smart, M.G.: ‘Computing critical
speeds for rotating machines with speed dependent bearing properties’, J. Sound
Vib., 1998, 213, (1), pp. 139–158
14 Hsieh, S.-C., Chen, J.-H., Lee, A.C.: ‘A modified transfer matrix method for the
coupling lateral and torsional vibrations of symmetric rotor-bearing systems’,
J. Sound Vibr., 2006, 289, (1/2), pp. 294–333
15 Schweitzer, G., Maslen, E.H.: ‘Magnetic bearings: theory, design, and application
to rotating machinery’ (Springer, Berlin, Heidelberg, 2009)
16 D’Alembert, J.: ‘Traité de dynamique’ (David, Paris, 1743)
17 Nicholas, J.C., Gunter, E.J., Allaire, P.E.: ‘Effect of residual shaft bow on
unbalance response and balancing of a single mass flexible rotor part 1:
unbalance response’, ASME J Eng Gas Turbines Power, 1976, 98, (2), pp. 171–181
18 Kolondzovski, Z., Arkkio, A., Larjola, J., et al.: ‘Power limits of high-speed
permanent-magnet electrical machines for compressor applications’, IEEE Trans.
Energy Convers., 2011, 26, (1), pp. 73–82
19 Binder, A., Schneider, T., Klohr, M.R.: ‘Fixation of buried and surface-mounted
magnets in high-speed permanent-magnet synchronous machines’, IEEE Trans.
Ind. Appl., 2006, 42, (4), pp. 1031–1037
IET Electr. Power Appl., 2015, Vol. 9, Iss. 9, pp. 628–633
& The Institution of Engineering and Technology 2015
633
17518679, 2015, 9, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/iet-epa.2014.0503 by Nat Prov Indonesia, Wiley Online Library on [14/07/2024]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
modulus average value of the shaft and the shrink fit components; I is
the moment of inertia of the outer diameter of the shrink fit
component; I* is the moment of inertia of outer diameter average
value of the shaft and the shrink fit components; Im is the moment
of inertia of the equivalent mass diameter.
It is clear that errors of the FEM are larger than the TMM. The
TMM has a higher accuracy, the error can be controlled within a
range of 5% by amendment of the flexural rigidity (EI). The first
two natural frequencies of the rotor-shaft assembly are 671.5 and
1576.6 Hz, respectively, when the elasticity modulus and the
moment of inertia of the flexural rigidity (EI) are taken as E* and
Im for the shrink fit components. The errors are only 0.2 and
2.1%, respectively. It is in good agreement with experimental
modal testing. The FEM takes 4800 s to calculate the modal of
rotor assembly, the TMM program running is only 52 s. By
amending flexural rigidity (EI) and optimising shear influence
coefficient, the rotor-shaft assembly modelling is more close to the
actual working condition, the results of natural frequencies are
consistent with the test values. It is observed that the bending
modes of the rotor-shaft assembly of high-speed PM motor are
mainly determined by the single shaft. The contribution of the
mass of the component is greater than stiffness to the bending
modes. This is the reason why the bending modes of the
rotor-shaft assembly are less than the single shaft.