A single FPGA-based portable ultrasound imaging system for point-of-care applications
advertisement

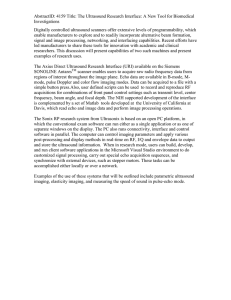
1386 IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control , vol. 59, no. 7, July 2012 A Single FPGA-Based Portable Ultrasound Imaging System for Point-of-Care Applications Gi-Duck Kim, Changhan Yoon, Sang-Bum Kye, Youngbae Lee, Jeeun Kang, Yangmo Yoo, and Tai-kyong Song Abstract—We present a cost-effective portable ultrasound system based on a single field-programmable gate array (FPGA) for point-of-care applications. In the portable ultrasound system developed, all the ultrasound signal and image processing modules, including an effective 32-channel receive beamformer with pseudo-dynamic focusing, are embedded in an FPGA chip. For overall system control, a mobile processor running Linux at 667 MHz is used. The scan-converted ultrasound image data from the FPGA are directly transferred to the system controller via external direct memory access without a video processing unit. The potable ultrasound system developed can provide real-time B-mode imaging with a maximum frame rate of 30, and it has a battery life of approximately 1.5 h. These results indicate that the single FPGAbased portable ultrasound system developed is able to meet the processing requirements in medical ultrasound imaging while providing improved flexibility for adapting to emerging POC applications. I. Introduction P oint-of-care (POC) diagnostic imaging systems allow clinicians to access and diagnose a patient at the scene of an accident or at the patient’s bedside because of their improved accessibility [1], [2]. In addition, these POC imaging systems have the potential to effectively address the challenges in healthcare disparities arising from current central, provider-centric, and hospital-based healthcare delivery. Desirable features of the POC diagnostic imaging systems include safety, price, portability, and ease of use [3]. Conventional X-rays, CT, and magnetic resonance imaging tools are not portable, and they are more suitable in centralized locations, e.g., hospitals and clinics, because of their size, cost, and the training required to operate them. On the other hand, ultrasound imaging is safe, noninvasive, portable, less expensive, relatively easy to use, and capable of real-time imaging [4]. Several portable ultrasound machines have been developed and deployed in various emerging POC applications, such as ambulatory and intensive care [5]. To achieve minManuscript received September 25, 2011; accepted February 15, 2012. This research was partially supported by the BK21 program, IC Design Education Center (IDEC), and the Converging Research Center Program through the Ministry of Education, Science and Technology (2011K000716), Republic of Korea. The authors are with the Department of Electronic Engineering, Sogang University, Seoul, Korea (e-mail: ymyoo@sogang.ac.kr and tksong@ sogang.ac.kr). Y. Yoo is also with the Interdisciplinary Program of Integrated Biotechnology, Sogang University, Seoul, Korea. DOI http://dx.doi.org/10.1109/TUFFC.2012.2339 iaturization and cost reduction as well as longer battery life, these portable ultrasound machines take advantage of the continuing advances in solid-state technologies, such as application-specific integrated circuits (ASICs) [6]. However, because the ASIC approach is typically beneficial to well-defined targeted applications (e.g., consumer electronics), its usefulness for the emerging POC diagnostic imaging systems would be limited [7]. Moreover, it is necessary to have improved functional flexibility in the POC imaging systems for adapting quickly to continuously evolving clinical applications. Previously, the programmable ultrasound system architecture was proposed, in which digital signal processors (DSPs) are used for performing core ultrasound signal and image processing [8], [9]. Because of improved flexibility and efficiency, the programmable ultrasound system can quickly test new clinical imaging modes and algorithms [10]–[12]. In addition, the programmable approach has been evaluated for POC diagnostic imaging systems, especially computational capabilities [13], [14]. However, these evaluations were inconclusive because they were conducted with commercially available testing boards, instead of building a prototypical device. Furthermore, it is challenging to perform front-end processing (i.e., beamforming) on a single DSP because of its limited data transfer bandwidth and processing performance [15]. Various methods have been proposed to miniaturize the ultrasound imaging system [16], [17], [18]. The delta-sigma oversampled beamforming method was proposed and implemented in a field-programmable gate array (FPGA) [16], [17]. Because of its low hardware complexity (digital logic), the beamformer with up to 57 channels could be implemented in a single Virtex-E FPGA (Xilinx Inc., San Jose, CA). Although the delta-sigma oversampled beamforming method can reduce the overall hardware complexity in the analog circuit and digital logic (i.e., beamformer), this method is not suitable for low-cost FPGA because it requires a high operating clock frequency to obtain a sufficient SNR [19]. The direct sampled in-phase/ quadrature (DSIQ) beamforming method can also reduce the hardware complexity [18]. In DSIQ, the second-order sampling is used to obtain in-phase and quadrature components, and receive focusing is conducted by using phase rotation. However, the DSIQ beamforming method yields degraded image quality because it assumes a narrowband signal, which is typically not satisfied in medical ultrasound imaging [20], [21]. 0885–3010/$25.00 © 2012 IEEE Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. kim et al.: FPGA-based portable ultrasound imaging system In this paper, we present our low-cost portable ultrasound system working as a standalone device, in which a single FPGA is employed. In the prototype portable system, all the ultrasound signal and image processing modules, including an effective 32-channel receive beamformer with extended aperture (EA), are embedded in a Spartan-3 FPGA (Xilinx Inc.). In addition, a Samsung S3C6410 mobile processor (Samsung Group, Suwon, Korea) running Linux at 667 MHz serves as a system controller. Cost-effective algorithms, such as pseudo-dynamic receive beamforming and look-up table (LUT)-based processing, are used for reducing the hardware complexity in ultrasound signal and image processing. The performance of the low-cost portable ultrasound system developed was evaluated with Field II simulation and phantom experiments. II. Methods A. System Overview Fig. 1 shows an overall system block diagram of the developed low-cost portable ultrasound imaging system using a single FPGA. As shown in Fig. 1, the portable system developed is composed of an ultrasound scanner module and a power supply/battery module. The 16-channel ultrasound scanner module consists of analog front-end circuits [i.e., analog receivers, analog-to-digital converters (ADCs) and transmit pulsers], and a Spartan-3 FPGA chip. The ultrasound scanner presented can provide the equivalent image quality of a 32-channel ultrasound system by using an EA technique. The analog front-end circuits in the developed portable ultrasound system include eight pulser drivers, 16 high-voltage (HV) pulsers, eight HV multiplexers (MUXs), and two eight-channel 12-bit ADC chips running at 40 MHz with a low-voltage differential signaling interface. The Spartan-3 FPGA is used for supporting receive beamforming and mid and backend B-mode processing. In addition, it is used for generating transmit pulse pattern for transmit focusing. The real-time controller is also incorporated in the FPGA for the interface between the system controller and the ultrasound transmit and receive modules (e.g., pulse-repetition frequency clock generation and synchronization among various modules). The Samsung S3C6410 mobile processor running Linux is used for controlling all the subsystems in the portable ultrasound system developed, including image display and communication. 1387 Fig. 1. System block diagram of the low-cost portable ultrasound based on a single field-programmable gate array (FPGA). where rbf(n) is the beamformed receive signal, D is the number of the physical channels in receive beamforming, N is the number of focusing points along the receive scanline, rd(n) is the receive signal from the dth channel, ad is the apodization coefficient, and τd is the receive focusing delay for the dth channel, respectively. The number of focusing points N is given by 2Z N = floor × f bf , c (2) where Z is the imaging depth, c is the speed of sound and fbf is the beamforming frequency. The dth channel receive focusing delay τd can be obtained by 1 (x d − x f )2 + (z d − z f )2 − z fp(n) , c n = 1, 2, , N , τ d(n) = (3) where (xd, zd) are the locations of the dth channel, (xf, zf) are the locations of the focal point, and zfp is the distance from the center channel to a focal point along the receive scanline. In dynamic receive beamforming, as shown in Fig. 3(a), the focusing delay at (3) is updated for each beamforming point (i.e., N times) at each channel, leading to increased hardware complexity. On the other hand, in the presented low-cost portable ultrasound imaging system, to lower its hardware complexity, the focusing delay value in (3) is not calculated at each focal point but updated only at the predetermined B. Front-End Module 1) Pseudo-Dynamic Receive Beamforming: In medical ultrasound imaging, the receive beamforming is used for improving spatial and contrast resolution. As shown in Fig. 2, the receive beamforming can be represented by D −1 rbf(n) = ∑ a drd[n − τ d(n)], d =0 n = 1, 2, …, N , (1) Fig. 2. Receive beamforming in a medical ultrasound imaging system. Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. 1388 IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control , vol. 59, no. 7, July 2012 increased. In our low-cost portable ultrasound imaging system, we adopted the EA technique, which has the potential to improve lateral resolution with a small number of physical receive channels. With the EA technique, the portable system developed can provide the equivalent image quality of a 32-channel receive beamformer by using 16 channels while sacrificing the frame rate by reducing it to half of the previous frame rate. Fig. 4 shows the transmit and receive array patterns for the EA technique used in the portable system developed. As shown in Fig. 4, the center 16-element array is transmitted twice in the same scanline direction. On the other hand, in receive, the center 16-element array is first used for detecting the backscattered ultrasound signal, and then the neighboring 16-element array is used. Each scanline is generated by performing receive beamforming with two sequentially received signals. C. Mid and Back-End Processing Modules Fig. 3. Receive focusing delay update pattern for (a) conventional dynamic receive focusing and (b) pseudo-dynamic focusing where only four focusing delay values are used. focal points (i.e., pseudo-dynamic receive focusing) depending on the number of focal zones (M) as shown in Fig. 3(b). For example, as shown in Figs. 3(a) and 3(b), whereas, in dynamic receive focusing, 12 focusing delay values are necessary for 12 focal points, only 4 focusing delay values are required when the 4 focal zones (i.e., M = 4, with 3 shared focusing points) are assumed. In addition, in our portable ultrasound system, for miniaturizing the overall system, the receive focusing delay values are generated based on the predetermined focal zone number offline and stored in an LUT. Because the number of the updated focusing delay value is substantially reduced, all the delay values for the proposed pseudo-dynamic receive focusing can be stored instead of calculating them on the fly. Although the number of focal zones is fixed, the shared focusing points at each zone can be varied, depending on imaging depth, to reduce the focusing delay errors. Currently, to support the view depth of 30 cm, a 2-kB LUT is used to store the 1024 focusing delay values (2 bytes for each delay value) for linear and convex array transducers for each channel (i.e., total LUT size of 32 kB) in our portable ultrasound imaging system. Fig. 5 shows the functional block diagram of mid and back-end processing for real-time ultrasound B-mode imaging in the portable system developed. 1) Mid Processing: As shown in Fig. 5, dc canceling is first applied to the post-beamformed data from a receive beamformer with pseudo-dynamic focusing and then timegain compensation (TGC) and quadrature demodulation are conducted. In dc canceling, a 32-tap finite impulse response filter with 16-bit coefficient resolution is used to cancel out the undesired dc component from ADCs, and two sequentially received ultrasound data points are accumulated in the EA processing block. In addition, a user-defined TGC curve is applied to generate a well-balanced ultrasound B-mode image over the imaging depth. To obtain complex baseband data for further back-end processing, the quadrature demodulation is applied. In the quadrature demodulation, the sinusoidal values for mixing are precalculated and stored at an LUT. In the portable ultrasound system developed, the 640-byte LUT is used for storing one period of 125-kHz cosine and sine signals that are sampled at 40 MHz. With this LUT, we can generate the multiple of a 125-kHz sinusoidal signal ranging from 125 to 20 MHz by increasing address (nnext) with nstep (i.e., nnext = ncurrent + nstep). For example, we can 2) Extended Aperture: In ultrasound receive beamforming, the spatial resolution in the lateral direction (i.e., perpendicular to the ultrasound propagation direction) can be approximated by [22] SD lat ∝ λz fp , D (4) where λ is the wavelength. Therefore, as the number of physical receive channels corresponding to D increases, the lateral resolution can be improved. However, the hardware complexity in the receive beamformer is also rapidly Fig. 4. Extended aperture (EA) technique. Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. kim et al.: FPGA-based portable ultrasound imaging system 1389 E. Power Supply Module Fig. 5. Functional block diagram of the mid and back-end processing for real-time ultrasound B-mode imaging in the developed portable ultrasound system. obtain 3-MHz cosine and sine values for mixing by setting nstep = 24. With this LUT-based approach, the dynamic quadrature demodulation can be achieved by dynamically changing nstep over the depth. 2) Back-End B-Mode Processing: To extract the envelope of the backscattered ultrasound signal, envelope detection is applied to complex baseband data from the mid processing module, and then log compression is conducted to reduce the dynamic range in the ultrasound envelope data. In the portable ultrasound imaging system developed, a 16-kB LUT is used for log compression. The LUT contains the 8-bit logarithm values of multiples of 4 (e.g., 4, 8, 12, …, 65 532) for the 16-bit envelop echo data. Thus, the 14-bit address is used by truncating 2 bits in the least significant bit of the input data. In addition, downsampling is applied to reduce the data rate (e.g., 1024 samples per scanline), and image enhancement (e.g., black-hole filter) and zone blending for multizone focusing are also applied, as shown in Fig. 5. 3) Scan Conversion: In scan conversion, the ultrasound data with polar coordinates are geometrically transformed into the Cartesian raster display data. The addresses and coefficients for bilinear interpolation in scan conversion are computed in real time by using the coordinate rotation digital computer algorithm [23]. The scan-converted raster pixel data are temporally stored in two synchronous dynamic RAM (SDRAMs) for display. In the portable system developed, these data are transferred into the system controller (i.e., Samsung S3C6410) via external DMA without a video processing unit to further reduce the hardware resource. D. CPU Module In the portable ultrasound imaging system developed, a Samsung S3C6410 mobile processor running at 667 MHz is used. A Linux kernel is stored in a flash memory for faster boot (<10 s). The portable system developed can support various peripheral interfaces, e.g., local access network (LAN), 16-gigabyte micro secure digital (SD), and universal serial bus (USB) 1.1. In addition, the digital video interface (DVI) is provided to drive an external monitor. The system parameters (mode, gain, TGC, and dynamic range) can be adjusted by a user via a 10.2-inch touch-screen LCD monitor. The power module used in our prototype portable system provides all the regulated power from a built-in 4-cell Li-ion battery, which can drive HV pulsers (i.e., maximum ± 70 V), analog circuits, and digital circuits. The battery is capable of providing 14.8 V with 2400 mAh. The HV is generated by using a quasi-resonance circuit with switching frequency of 65 kHz, transformer, and feedback circuit. Therefore, the maximum regulated voltage is determined by the transformer turns ratio (e.g., 16:42) and feedback circuit. The regulation circuit for HV is operated in the intermittent mode for the various HV levels. F. Experimental Setup Simulation and phantom experiments were conducted to evaluate the performance of the proposed efficient algorithms in the portable ultrasound imaging system developed. A simulation model was generated by the Field II program [24]. In the simulation, an image of the point targets located at different depths and speckle patterns was obtained by using a 3.5-MHz convex array. The parameters used in the simulation are summarized in Table I. As listed in Table I, to evaluate the EA technique, the center 16-element array was first used for transmission and reception. The next transmission was conducted on the same scanline with the same center 16-element array, whereas the neighboring 16-element array was used for reception. The beamforming was performed for each reception, and two sequentially beamformed data points were accumulated to obtained one scanline. For the phantom experiment, while a multipurpose tissue-mimicking phantom (Model 539, ATS Laboratories Inc., Bridgeport, CT) was scanned with a 3.5-MHz convex array transducer, a near-field tissue-mimicking phantom (Model 551, ATS Laboratories Inc.) was scanned with a 7.5-MHz linear array transducer. G. Evaluation Metrics In the simulation, for quantitative evaluation, the −18dB lateral resolution was measured with a contour map for a point target. In addition, the contrast-to-noise ratio (CNR) was calculated by CNR = µc − µs , (σ c2 + σ s2) (5) where μs and μc are the average intensities in the speckle and cyst regions, respectively, and σ s2 and σ c2 are the variances of each region. III. Results and Discussion A. Simulation Results Fig. 6 shows the simulation results of an effective 32-channel system with 60-dB dynamic range from the Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. 1390 IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control , vol. 59, no. 7, July 2012 TABLE I. Parameters Used for the Simulation. Parameter Value Sampling frequency (MHz) Number of channels Number of scanlines Center frequency (MHz) Field of view (degree) Radius of curvature (mm) Element pitch (mm) Element height (mm) Elevation focus (mm) Transmit focus (mm) Dynamic range (dB) 40 16 192 3.5 85.256 40 0.31 13 80 50 60 conventional dynamic receive focusing and pseudo-dynamic focusing methods without receive apodization. In this study, although, in the conventional dynamic receive focusing, the focusing delay value in (3) is updated for every focusing point, it is shared for multiple focusing points within the same focusing zone in the pseudo-dynamic focusing method. In addition, in the pseudo-dynamic focusing method, the number of shared focusing points at each focal zone was dynamically adjusted depending on imaging depth to minimize the focusing errors. In other words, for the first 5-cm imaging depth, 32 focusing points use the same focusing delay value, i.e., 32 shared focusing points. In the next 5-cm imaging depth (i.e., 5 to 10 cm), the same focusing delay value is applied for 64 focusing points. In the simulation, for the imaging depth of 12 cm, the focusing delay values used in the conventional dynamic receive focusing method were 6144 (12 × 512), whereas those for the pseudo-dynamic focusing method were 128 (80 zones for 0 to 5 cm, 40 zones for 5 to 10 cm, and 8 zones for 10 to 12 cm). As shown in Figs. 6(a) and 6(b), with visual assessment, it is difficult to find the impact of using the different numbers of focusing delay values from the dynamic and pseudo-dynamic receive focusing methods (i.e., 6144 versus 128, respectively). For a quantitative comparison, the −18-dB lateral resolutions of point targets at each depth were measured and are shown in Fig. 7. As illustrated in Fig. 7, the pseudo-dynamic receive focusing method yielded a negligible degradation in lateral resolution (i.e., <0.2 mm). On the other hand, when the Hanning window was used for the apodization, the identical lateral resolution with broadened main lobe width was obtained at each depth from both methods. Similar results were obtained in the CNR for the region marked in Fig. 6(a) (i.e., 2.84 and 2.81 for the dynamic and pseudo-dynamic receive focusing method, respectively). These results indicate that the proposed pseudo-dynamic focusing method is sufficient for the current portable ultrasound imaging system. However, the degradation of image quality from the pseudo-dynamic focusing would be more pronounced with the higher channel ultrasound imaging system (e.g., 64 channels). Because of the nonlinear increase in the focusing delay values, the pseudo-dynamic focusing method will introduce a substantial number of delay errors, especially in the near field [25]. Thus, for the higher channel ultrasound imaging system, the degradation in image quality can be reduced by assigning the small number of shared focusing points in the near field (e.g., 16, 64, and 128 shared focusing points for imaging depths of 0 to 2 cm, 2 to 6 cm, and 6 to 12 cm, respectively). B. Prototype Low-Cost Portable Ultrasound System Fig. 8 shows a prototype of the low-cost portable ultrasound system developed. The system specifications and parts of the portable ultrasound system developed are summarized in Table II. As listed in Table II, the prototype ultrasound system can support the B-mode and BM-mode, and the size (245 mm width × 190 mm height) and weight (about 560 g) are suitable for POC applications. For display, a 10.2-inch touch screen LCD monitor is attached for displaying a B-mode image with single, Fig. 6. Field II simulation images of an effective 32-channel system using (a) the conventional dynamic receive focusing method and (b) the pseudo-dynamic receive focusing method. Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. kim et al.: FPGA-based portable ultrasound imaging system 1391 Fig. 7. −18 dB lateral resolution from the Field II simulation at each imaging depth for the dynamic and pseudo-dynamic receive focusing methods. dual, and quad screen formats. The dual and quad modes can display two and four images, respectively, to allow clinicians to evaluate multiple images side-by-side. In addition, the cine mode with 256 frames is available, and the captured images can be directly exported via the USB interface. The keyboard-type buttons are used for menu navigation and the user text interface. Figs. 9(a) and 9(b) show the main board and the power supply module inside the prototype portable ultrasound system developed. As shown in Fig. 9(a), the main board consists of the ultrasound scanner module and the CPU module with LAN, USB, micro SD, and DVI. In the ultrasound scanner module, there are eight HV multiplexers, 16 HV pulsers, eight pulser drivers, two ADC chips, and a Spartan-3 FPGA chip. The connector at the top of the main board is used for interconnecting between the main board and the power module, whereas the left one connects the main board to the ultrasound probe. The power module provides all the power required in analog and digital circuits, as shown in Fig. 9(b). Furthermore, the HV (i.e., ± 70 V) is supplied for driving the HV pulser. The voltage level in the HV pulser can be adjusted from the Fig. 8. Prototype low-cost portable ultrasound system. Spartan-3 FPGA for supporting various modes, e.g., Bmode, C-mode, and D-mode. C. Demonstration of the Portable Ultrasound Imaging System Developed Figs. 10(a) and 10(b) show the captured images using a 3.5-MHz convex array transducer and a 7.5-MHz linear array transducer with the developed prototype portable ultrasound system from two tissue-mimicking phantoms with imaging depths of 14 and 4 cm, respectively. As shown in Fig. 10(a), with the 3.5-MHz convex array probe, the portable system developed can clearly show point targets up to 13 cm, and cystic lesions are also depicted. Similarly, the portable system developed clearly visualized the point targets within 4 cm with the 7.5-MHz linear array transducer. Further evaluation of the portable TABLE II. System Specifications. Mode B-mode, BM-mode Size Weight Power Probe Display CPU OS System memory FPGA Peripherals Display mode Cine 245-mm width × 190-mm height 560 g External power module/battery 3.5-MHz convex and 7.5-MHz linear array probes 10.2-inch TFT LCD (800 × 480) with touch panel Samsung S3C6410 running at 667 MHz Linux kernel 2.6.21 256 MB (SDRAM), 4 GB (flash) Xilinx Spartan-3 (XC3S4000) USB1.1 host and client, microSD, LAN, DVI for external monitor Dual and quad B-mode 256 frames LCD = liquid crystal display; OS = operating system; SDRAM = synchronous dynamic RAM; USB = universal serial bus; DVI = digital visual interface. Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. 1392 IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control , vol. 59, no. 7, July 2012 Fig. 9. (a) Ultrasound scanner and CPU modules and (b) power and battery modules. ultrasound imaging system developed will be conducted for various POC applications (e.g., emergency medicine). The hardware complexity of each processing module in the portable system developed was analyzed by using the ISE9.2 synthesis tool (Xilinx), and the results are summarized in Table III, along with a list of the equivalent gate counts. Because of the proposed efficient beamforming algorithms (i.e., pseudo-dynamic receive focusing and LUT-based delay update), the hardware complexity in the front-end processing (i.e., beamforming) is comparable with the mid and back-end B-mode processing, as listed in Table III (2 612 565 versus 2 081 064 in equivalent gate counts). When all processing modules listed in Table III are embedded in the Spartan-3 FPGA chip, they use 46, 41, 93, and 86% of slide flip-flops, 4-input LUTs, block RAMs, and multipliers. Thus, all the computational and data transfer rate requirements for the low-cost portable B-mode ultrasound imaging system can be handled by the cost-effective single FPGA chip (<$50). Furthermore, the portable system provides a battery lifetime of 1.5 h when scanning continuously. III. Conclusion In this paper, we present a low-cost portable ultrasound imaging system based on a single FPGA for point- Fig. 10. Phantom images by the prototype portable ultrasound imaging system with (a) a 3.5-MHz convex array probe and (b) a 7.5-MHz linear array probe. of-care applications. The prototype of the portable ultrasound system developed showed that it can handle all the ultrasound signal and image processing requirements in real time. We believe the size (245 mm width × 190 mm height) and weight (about 560 g) as well as the functionality of the portable system would be a good fit for investigating its clinical benefits in emerging POC applications (e.g., emergency rooms and nursing care). TABLE III. Hardware Complexity of Each Processing Module in the Developed Low-Cost Portable Ultrasound Imaging System Processing module Equivalent gate count Transmit and receive beamforming Mid and back-end B-mode processing Scan conversion Real-time control and others Total 2 612 565 2 081 064 153 696 1 806 177 6 653 502 The equivalent gate count was estimated by using the Xilinx ISE9.2 synthesis tool. Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. kim et al.: FPGA-based portable ultrasound imaging system References [1]J. J. Hwang, J. Quistgaard, J. Souquet, and L. A. Crum, “Portable ultrasound device for battle field trauma,” in Proc. IEEE Ultrason. Symp., vol. 2, pp. 1663–1667, 1998. [2] M. Karaman, P. C. Li, and M. O’Donnell, “Synthetic aperture imaging for small scale systems,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control, vol. 42, no. 3, pp. 429–442, 1995. [3]Y. M. Yoo, F. K. Schneider, A. Agarwal, T. Fukuoka, L. M. Koh, and Y. Kim, “Ultrasound machine for distributed diagnosis and home use,” in Proc. 1st Distributed Diagnosis and Home Healthcare Conf., 2006, pp. 63–66. [4] P. N. T. Wells, “The prudent use of diagnostic ultrasound,” Ultrasound Med. Biol., vol. 13, no. 7, pp. 391–400, 1987. [5] B. P. Nelson and K. Chason, “Use of ultrasound by emergency medical services: A review,” Int. J. Emerg. Med., vol. 1, no. 4, pp. 253–259, 2008. [6]J. J. Hwang and J. Quistgaard, “A portable ultrasound array imaging device,” Proc. SPIE, vol. 3664, pp. 194–201, 1999. [7]S. Sikdar, R. Managuli, L. Gong, V. Shamdasani, T. Mitake, T. Hayashi, and Y. Kim, “A single mediaprocessor-based programmable ultrasound system,” IEEE Trans. Inf. Technol. Biomed., vol. 7, no. 1, pp. 64–70, 2003. [8]Y. Kim, J. H. Kim, C. Basoglu, and T. C. Winter, “Programmable ultrasound imaging using multimedia technologies: A next-generation ultrasound machine,” IEEE Trans. Inf. Technol. Biomed., vol. 1, no. 1, pp. 19–29, 1997. [9] V. Shamdasani, R. Managuli, S. Sikdar, and Y. Kim, “Ultrasound color-flow imaging on a programmable system,” IEEE Trans. Inf. Technol. Biomed., vol. 8, no. 2, pp. 191–199, 2004. [10]S. Sikdar, V. T. Shamdasani, M. S. Lidstrom, K. W. Beach, and Y. Kim, “Low-cost detection and monitoring of coronary artery disease using ultrasound,” in Proc. 1st Distributed Diagnosis and Home Healthcare Conf., 2006, pp. 55–58. [11]Y. M. Yoo, R. Managuli, and Y. Kim, “New multi-volume rendering technique for three-dimensional power Doppler imaging,” Ultrasonics, vol. 46, no. 4, pp. 313–322, 2007. [12] U. Bae, M. Dighe, V. Shamdasani, S. Minoshima, T. Dubinsky, and Y. Kim, “Thyroid elastography using carotid artery pulsation: A feasibility study,” in Proc. IEEE Ultrasonics Symp., 2006, pp. 614–617. [13]A. Agarwal, F. K. Schneider, Y. M. Yoo, and Y. Kim, “Image quality evaluation with a new phase rotation beamformer,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control, vol. 55, no. 9, pp. 1947–1955, 2008. [14] F. K. Schneider, Y. M. Yoo, A. Agarwal, L. M. Koh, and Y. Kim, “New demodulation filter in digital phase rotation beamforming,” Ultrasonics, vol. 44, no. 3, pp. 265–271, 2006. [15] F. K. Schneider, A. Agarwal, Y. M. Yoo, T. Fukuoka, and Y. Kim, “A fully programmable computing architecture for medical ultrasound machines,” IEEE Trans. Inf. Technol. Biomed., vol. 14, no. 2, pp. 538–540, 2010. [16] B. G. Tomov and J. A. Jensen, “A new architecture for a single-chip multi-channel beamformer based in a standard FPGA,” in Proc. IEEE Ultrasonics Symp., 2001, pp. 1529–1533. [17] B. G. Tomov and J. A. Jensen, “Compact FPGA-based beamformer using oversampling 1-bit A/D converters,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control, vol. 52, no. 5, pp. 870–880, 2005. [18] K. Ranganathan, M. Santy, T. N. Blalock, J. A. Hossack, and W. F. Walker, “Direct sampled I/Q beamforming for compact and very low-cost ultrasound imaging,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control, vol. 51, no. 9, pp. 1082–1094, 2004. [19] H. H. Han, J. J. Kim, and T.-K. Song, “Hardware-efficient methods for eliminating of signal distortion in sigma-delta based ultrasound beamformer,” Ultrason. Imaging, vol. 31, no. 2, pp. 101–119, 2009. [20]A. Agarwal, Y. Yoo, F. K. Schneider, C. Gao, L. M. Koh, and Y. Kim, “New demodulation method for efficient phase rotation beamforming,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control, vol. 54, no. 8, pp. 1656–1668, 2007. [21]C. Yoon, J. Lee, Y. Yoo, and T.-K. Song, “Display pixel based focusing using multi-order sampling for medical ultrasound imaging,” Electron. Lett., vol. 45, no. 25, pp. 1292–1294, 2009. [22]S. Stergiopoulos, Advanced Signal Processing Handbook: Theory and Implementation for Radar, Sonar, and Medical Imaging Real Time Systems. Boca Raton, FL: CRC Press, 2000. 1393 [23]J. E. Volder, “The CORDIC trigonometric computing technique,” IRE Trans. Electron. Comput., vol. EC-8, no. 3, pp. 330–334, 1959. [24]J. A. Jensen, “FIELD: A program for simulating ultrasound systems,” Med. Biol. Eng. Comput., vol. 34, suppl. 1, pt. 1, pp. 351–353, 1996. [25] H.-Y. Sohn, J. Kang, J. Cho, T.-K. Song, and Y. Yoo, “Timesharing bilinear delay interpolation for ultrasound dynamic receive beamformer,” Electron. Lett., vol. 47, no. 2, pp. 89–91, 2011. Gi-Duck Kim was born in Incheon, Korea, in 1975. He received the M.S. and Ph.D. degrees in the Department of Electronic Engineering from Sogang University, Seoul, Korea, in 2000 and 2008, respectively. From 1999 to 2003, he conducted research and development in ultrasound echo processing at Medison, Seoul, Korea, and from 2008 to 2010, he was a systems engineer for ultrasound systems at Bionet, Seoul, Korea. He is currently a research professor of Sogang Institute of Advanced Technology (SIAT) in Sogang University, Seoul, Korea. His research interests include signal processing and low-cost system design for handheld ultrasound systems. Changhan Yoon received the Bachelor and Master of Science degrees in electronic engineering in 2007 and 2009 from Sogang University, Seoul, Korea. He is currently pursuing a Ph.D. degree in the Department of Electronic Engineering at Sogang University. His main research interests include medical ultrasound imaging and therapy, portable ultrasound imaging systems, digital signal processing, digital system design, and photoacoustic imaging. Sang-Bum Kye was born in Seoul, Republic of Korea, in 1966. He received his B.S. degree in electrical engineering from Korea University in 1989, and the M.S degree in electrical and electronic engineering from Korea Advanced Institute of Science and Technology in 1992. From 1992 to 2007, he conducted research and development on ultrasound scanners at Medison Co. Ltd., and from 2007 to 2010 at Bionet Co. Ltd. He is currently pursuing a Ph.D. degree in the Department of Electronic Engineering at Sogang University, Seoul, Korea. His research interests include signal processing and lowcost system design of ultrasound systems for point of care. Youngbae Lee was born in Seoul, Republic of Korea, in 1965. He received the B.S. degree in electrical engineering from Yonsei University in 1990 and the M.S. degree in electrical and electronic engineering from Korea Advanced Institute of Science and Technology in 1992. He conducted research and development on medical ultrasound scanners from 1992 to 2002 at Medison Co. Ltd., from 2003 to 2007 at the Siemens Ultrasound Group Korea, and from 2008 to 2010 at Bionet Co. Ltd. He is currently pursuing a Ph.D. degree in the Department of Electronic Engineering at Sogang University, Seoul, Korea. His research interests include signal processing and ultrasound scanners for point of care. Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply. 1394 IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control , vol. 59, no. 7, July 2012 Jeeun Kang received the Bachelor degree in electronic engineering in 2009 from Sogang University, Seoul, Korea. He is currently a candidate for the Master degree in electronic engineering at Sogang University. His main research interests are focused on implementation of a portable ultrasound system, and imaging algorithms of ultrasound and photoacoustic imaging. Yangmo Yoo received the B.S. and M.S. degrees in electronics engineering in 1999 and 2001, respectively, from Sogang University, Seoul, Korea, and the Ph.D. degree in bioengineering in 2007 from the University of Washington, Seattle. From 2007 to 2009, he was a systems design engineer with Philips Healthcare, Bothell, WA. He is currently an assistant professor of electronics engineering and is in the Interdisciplinary Program of Integrated Biotechnology at Sogang University. His research interests include medical ultrasound imaging and its clinical applications in diagnostics and therapy. Tai-Kyong Song (M’97) received his B.S. degree in electronic engineering from Sogang University, Seoul, Korea, in 1984, and his M.S. and Ph.D. degrees in the Department of Electrical and Electronic Engineering from the Korea Advanced Institute of Science and Technology (KAIST), Seoul, Korea, in 1985 and 1990, respectively. He worked in the department of Physiology and Biophysics, Mayo Clinic, Rochester, MN, as a research fellow for 2 years before being appointed as an adjunct professor in the Department of Information and Communication Engineering at KAIST from 1993 through 1995. He worked at Siemens Medical-System Inc., Issaquah, WA, as a staff scientist from 1995 through 1997 and joined the Department of Electronic Engineering at Sogang University, Seoul, Korea, as an assistant professor in 1997. He was promoted to professor in 2006. Dr. Song has been the director of the Center for Medical Solution Research at Sogang University since 1997. He served as an associate editor of IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control from 2002 through 2007. He is currently the vice president for research, dean of the Industry–University Cooperation Foundation, and the vice director of the Sogang Institute of Advanced Technology at Sogang University. His research interests include handheld ultrasound imaging systems, real-time 3-D scanning algorithm and system development, high-end digital ultrasound imaging systems, and ultrasound signal and imaging processing. Authorized licensed use limited to: Indian Institute of Technology Palakkad. Downloaded on October 04,2023 at 21:41:58 UTC from IEEE Xplore. Restrictions apply.