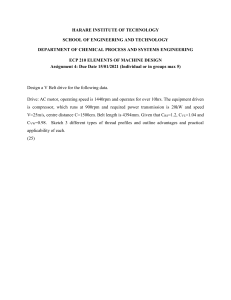
THE UNIVERSITY OF ZAMBIA SCHOOL OF ENGINEERING DEPARTMENT OF MECHANICL ENGINEERING 2020 ACADEMIC YEAR DEFFERED EXAMINATIONS MEC 4702 -- VIBRATIONS AND CONTROL ENGINEERING I TIME ALLOWED: THREE (3) HOURS [Closed Book] [QUESTION PAPER] INSTRUCTIONS: 1. READ and FOLLOW all instructions. 2. Do not open the question paper unless the proctor instructs you to do so. 3. This paper contains EIGHT (8) questions. Answer a TOTAL OF FIVE (5) questions. 4. Each question carries 20 MARKS 5. Submit SECTION A and SECTION B in Separate Answer Booklets 6. Begin each question on a NEW PAGE 7. Show ALL your workings (sketches, graphs, etc.) and state any assumptions made. 8. Indicate your computer number on each and every sheet used. 9. Laplace Transform Tables are allowed. 10. All mobile devices MUST be switched off or put in flight mode. SECTION A (ANSWER AT LEAST TWO (2) QUESTIONS FROM THIS SECTION) Useful formulas � � = �� � �� ��+� , �= � ���+�� , �= � � �� Question 1 Give brief answers to the following: a) Give two examples each of the bad and the good effects of vibration. Ans-a) Examples of bad effects of vibration: 1. Structural Damage: Vibrations can lead to fatigue and structural damage in buildings, bridges, and other structures, reducing their lifespan and safety. 2. Machinery Malfunction: Excessive vibration in machinery can lead to misalignment, wear, and failure of components, resulting in costly repairs and downtime. Examples of good effects of vibration: 1. Musical Instruments: Vibrations are fundamental to producing sound in musical instruments like guitars, violins, and drums, creating beautiful music. 2. Ultrasonic Cleaning: Vibrations are used in ultrasonic cleaning to dislodge and remove dirt particles from delicate objects such as jewelry and electronic components. b) What are the three elementary parts of a vibrating system? Ans-The three elementary parts of a vibrating system are: 1. Mass (m): Represents the mass or inertia of the vibrating element. 2. Spring (k): Represents the stiffness or restoring force of the system. 3. Damper (c): Represents the damping or energy dissipation element of the system. c) Define the number of degrees of freedom of a vibrating system. Ans-The number of degrees of freedom of a vibrating system refers to the minimum number of independent coordinates needed to describe the system's motion completely. For example, in a single-degree-of-freedom system, only one coordinate (usually displacement) is required to describe its motion at any given time. d) What is the difference between a discrete and a continuous system? Is it possible to solve any vibration problem as a discrete one? Ans-Discrete system vs. Continuous system: - Discrete System: A discrete system consists of a finite number of masses and springs with distinct discrete locations. The masses are concentrated at specific points, and the system's motion can be described using finite degrees of freedom. For example, a series of masses connected by springs in a chain or a mass attached to a spring on a vibrating table represents a discrete system. - Continuous System: A continuous system, on the other hand, is one in which the masses and stiffness elements are distributed continuously over a continuous domain, and the system's motion is described by infinite degrees of freedom. Examples include vibrating beams, plates, and membranes. In theory, any vibration problem can be solved as a discrete one by dividing the continuous system into small discrete elements and applying the principles of discrete systems. However, for practical engineering problems involving large continuous structures, solving them as continuous systems might be more convenient and computationally efficient. e) Why is it important to find the natural frequency of a vibrating system? [20 Marks] Ans-Finding the natural frequency of a vibrating system is crucial for several reasons. The natural frequency represents the inherent rate at which a system oscillates when disturbed from its equilibrium position, without external forces. Understanding and accurately determining the natural frequency is fundamental in various engineering and scientific applications, such as structural design, mechanical systems, and electronic circuits. It allows engineers to predict and mitigate the risk of resonance, which can lead to excessive vibrations, structural damage, or even system failure. By tuning a system to operate away from its natural frequency or designing structures that avoid resonance, engineers can enhance stability, performance, and overall safety. Therefore, identifying and analyzing the natural frequency is indispensable in optimizing the design and functionality of diverse systems, ensuring their reliability and minimizing the potential for undesirable vibrations and structural damage. Question 2 a) Determine ��� , ��� , and ��� for the system of Fig. Q2a, using x, the downward displacement of the block from the system’s equilibrium position, as the generalized coordinate. Ans-The angular displacement θ of the disk and the displacement y of the particle on the cable connected to the viscous damper at an arbitrary instant are x θ= , r y = 2rθ = 2x The system’s kinetic energy at an arbitrary instant is T= 1 2 1 2 1 2 1 x 2 mx + Iθ = mx + I 2 2 2 2 r = 1 I m + 2 x2 2 r Noting that the potential energy change due to gravity balances with the potential energy change due to static deflections, the deflections, the potential energy of the system at an arbitrary instant is V= 1 2 kx 2 The work done by the viscous damping force between two arbitrary instants is �1→2 =− �2 �1 ���� =− =− Thus from the above ��� = � + � , �2 x2 �2 �1 �(2�)�(2�) 4cx dx x1 ��� = �, ��� = 4� b) Figure Q2b shows a mass spring system. The mass is on rollers as it vibrates. Assuming that the rollers are frictionless, determine: Figure Q2b. A mass spring damper vibration system. a. The natural frequency Ans-The rules for calculating the equivalent stiffness of parallel and series connection of springs. Springs in series Springs in parallel ��� = 1 �1 �2 = 1 �1 + 1 �2 �1 + �2 ��� = �1 + �2 From Figure Q2b, the equivalent spring constant is: ��� = �1 + �2 + �3 + �4 �5 2×3 = 10 + 1 + 4 + ��/� = 16.2��/� �4 + �5 2+3 Then using the standard formulas for frequency: �� = Ans-- ��� = � 16.2 × 103 = 40.25 ���/� 10 b. The critical damping coefficient ��� = 2��� = 2 �� = 2(10)(40.25) = 805 c. If the system is over damped, critically damped, or under damped. Ans-Then using the standard formulas for damping ratio: ζ= [4+3+3=10 Marks] c c c = = = 0.001242 ≈ 0.001 Ccr 2mωn 805 Thus the system is underdamped, in fact very lightly damped. Question 3 Figure Q3 shows a multiple degree of freedom mass spring system. With the indicated generalized coordinates: i. Use Lagrange’s equations to derive the differential equations governing the motion ii. Make linearizing assumptions, and write the resulting equations in matrix form. iii. Indicate whether the system is statically coupled, dynamically coupled, neither, or both. Figure Q3 Multiple degree of freedom mass spring system [10+6+4=20 Marks] Ans-Given: System shown with �1 , �2 , ��� �3 as generalized coordinates Find: Differential equations using Langrange’s equations Solution: the kinetic energy at an arbitrary instant is �= 1 1 1 (10)�21 + (4)�22 + (8)�23 2 2 2 The potential energy of the system at an arbitrary instant is �= 1 1 1 (3000)�21 + (2000) �2 − �1 2 + (600) �3 − �2 2 2 2 2 Rayleigh’s dissipation functions for the problem is 1 1 1 1 ℑ =− (120)�21 − (300) �2 − �1 2 − (100) �3 − �2 2 − (150)�23 2 2 2 2 Application of Lagrange’s equations to this system with � = � − � � �� �� �ℑ − − =0 �� ��1 ��1 ��1 10�1 − 420�1 + 150�2 + 5000�1 − 1000�2 = 0 � �� �� �ℑ − − =0 �� ��2 ��2 ��2 4�2 + 150�1 − 400�2 + 50�3 − 1000�1 + 2600�2 − 300�3 = 0 � �� �� �ℑ − − =0 �� ��3 ��3 ��3 8�3 + 50�2 − 250�3 − 300�2 + 600�3 = 0 10 0 0 0 4 0 0 �1 −420 0 �2 + 150 8 �3 0 The matrix formulation is 150 −400 50 �1 0 5000 �2 + −1000 50 −250 �3 0 −1000 2600 −300 �1 0 0 −300 �2 = 0 0 600 �3 Mx + Cx + Kx = F Where M is the � × � mass matrix, C is the � × � damping matrix, K is the � × � stiffness matrix, F is the � × 1 force vector, x is the � × 1 displacement vector, � is the � × 1 velocity vector, and � is the � × 1 acceleration vector. The coupling of a system relative to the choice of generalized coordinate is specified according to how the mass and stiffness matrices are populated. A diagonal matrix is a matrix in which the only nonzero elements are along the main diagonal of the matrix. If the stiffness matrix is not a diagonal matrix, the system is said to be statically coupled relative to the choice of generalized coordinates. If the system is statically coupled with respect to a set of generalized coordinates �� , � = 1, 2, . . . , �, then there is at least one i such that application of a static force to the particle whose displacement is �� results in a static displacement of the particle whose displacement is �� , for some � = �. If the mass matrix is not a diagonal matrix, the system is said to be dynamically coupled. If the system is dynamically coupled, then there exists at least one i such that application of an impulse to the particle whose displacement is �� instantaneously induces a velocity �� , for some � = �. Therefore the above system is statically coupled. Question 4 (a) Find the natural frequencies of the system shown in figure Q4, with �� = �, �� = ��, �� = � ��� �� = ��. Determine the response of the system when � = ���� �/�, � = �� ��, and the initial values of the displacements of the masses �� and �� are 1 and -1, respectively [20 Marks] Ans-Equations of motion �1 �1 + �1 + �2 �1 − �2 �2 = 0 � 2 � 2 + �2 � 2 − �2 � 1 = 0 �1 With �� (�) = �� cos �� + � ; � = 1, 2. Eqs (E1) give the frequency equation −�2 �1 + �1 + �2 − �2 ω4 − or Roots of Eq. (E2) are If �21 , �22 = − �2 =0 − �2 �2 + �2 k1 + k2 k2 k1 k2 + ω2 + =0 m1 m2 m1 m2 E2 1 �1 + �2 �2 2 �1 �2 �1 + �2 �2 + + − ∓ 4 2�1 2�2 �1 �2 �1 �2 �1 = (1) �1 (1) (1) �2 = �1 �1 ��� � 2 = (2) �1 (2) (2) �2 = �2 �1 �3 , (1) �2 �1 = = (1) �1 (2) �2 �2 = = (2) �1 General solution of �1 is − �1 �21 + �1 + �2 �2 = �2 − �2 �21 + �2 �4 − �1 �22 + �1 + �2 �2 = �2 − �2 �22 + �2 (1) �5 (2) �1 (�) = �1 cos �1 � + �1 + �1 cos �2 � + �2 (1) (1) (2) (2) �2 (�) = �1 �1 cos �1 � + �1 + �2 �1 cos �2 � + �2 Where �1 , �1 , �1 ��� �2 can be found using Eqs 5.18 (1) (1) �1 = �1 cos �1 (2) �1 cos �2 1 = r2 − r1 = r2 x1 (0) − x2 (0) (2) �1 = 1 r2 − r1 2 2 (1) 2 1/2 (2) 2 1/2 + �1 sin �1 2 r2 x1 (0) − x2 (0) 2 + ω21 + �1 sin �2 − r1 x1 (0) − x2 (0) 2 + −1 �1 = tan (1) �1 sin �1 = tan−1 (1) �1 cos �1 (2) �1 sin �2 �2 = tan−1 (2) = tan−1 �1 cos �2 �6 1/2 r1 x1 (0) − x2 (0) 2 ω22 1/2 −�2 �1 (0) + �2 (0) �1 �2 �1 (0) − �2 (0) �1 �1 (0) + �2 (0) �2 − �1 �1 (0) + �2 (0) For �1 = �, �2 = 2�, �1 = � and �2 = 2�, �3 gives �21 = 2 − 3 � � , �22 = 2 + 3 � � When k = 1000 N/m and m = 20 kg. �1 = �1 = 3.6603 ���/��� ��� �2 = 13.6603 ���/��� �2 �2 = 1.36604, �2 = = 0.36602 − �2 �21 + �2 − �2 �22 + �2 With �1 (0) = 1, �1 (0) = 0, �2 (0) =− 1 ��� �2 (0) = 0, (1) (2) ���. (5.18) give �1 =− 0.36602, �1 =− 1.36603, �1 = 0, �2 = 0 Response of the system is �1 (�) =− 0.36602 cos 3.6603� − 1.36603 cos 13.6603� �2 (�) =− 0.5 cos 3.6603� + 0.5 cos 13.6603� (5.18) �7 SECTION B (ANSWER AT LEAST TWO (2) QUESTIONS FROM THIS SECTION) Question 5 A belt ‘weigher’ is a piece of industrial control equipment used to gauge the mass flow rate of material travelling over a troughed conveyor belt of any length which is able to adequately contain the material being weighed. It is also known as a belt scale, dynamic scale, conveyor scale or inmotion weigher. In most installations, a belt weigher replaces a short section of the support mechanism of the belt, which might be one or more sets of idler rollers or a short section of channel or plate. This weighted support is mounted on load cells, either pivoted, counterbalanced or not, or fully suspended. The mass measured by the load cells is integrated with the belt speed to compute the mass of material moving on the belt, after allowing for the mass of the belt itself. Belt weighers generally include the necessary electronics to perform this calculation, often in the form of a small industrialized microprocessor system. Outputs from belt weighers are typically in form of pulses at predefined increments of mass and an analogue signal proportional to the flow rate. In addition, some belt weigher controllers will offer interlocking features such as driving output to stop the belt when a predefined mass of material has been measured, or a range of alarms to indicate nil flow, belt slippage and belt stoppage. The uses of the belt weigher include mineral and aggregate extraction, continuous mixing processes, control of variable rate feeders, port handling and ship loading processes. a) With respect to belt weighers, list three (3) advantages and two (2) disadvantages of control systems. Ans-Advantages of Control Systems in Belt Weighers: 1. Accuracy and Precision: Control systems in belt weighers provide accurate and precise measurements of the mass flow rate of materials on a conveyor belt. This high level of accuracy is crucial for industries where precise material handling and tracking are essential. 2. Automation and Efficiency: Control systems enable the automation of the weighing process, contributing to increased efficiency in industrial operations. Automated systems can continuously monitor and adjust the material flow rate, reducing the need for manual intervention and ensuring a consistent production output. 3. Data Logging and Reporting: Modern control systems often come equipped with data logging capabilities. This allows for the recording of measurements over time, facilitating data analysis, performance monitoring, and compliance reporting. This information is valuable for process optimization and quality control. Disadvantages of Control Systems in Belt Weighers: 1. Initial Cost: Implementing a sophisticated control system for belt weighers incurs an initial cost for the purchase, installation, and integration of the system. The investment might be substantial, particularly for smaller businesses or industries with budget constraints. 2. Maintenance and Calibration: Control systems require regular maintenance and calibration to ensure accurate and reliable performance. The sensors, load cells, and electronic components may need periodic checks and adjustments, adding to the overall operational costs and potential downtime for maintenance activities. b) Given the background that control systems may have several interconnected feedback loops, find the closed-loop transfer function �(�)/�(�) for the automatic weigher block diagram representation shown in Figure Q5.1, using block diagram reduction techniques. [5+15=20 Marks] Ans-- In this exercise of Figure 6.1 we make use of the equivalent forms shown in Figures 5.7 and 5.8. First, move �2 (�) to the left past the pickoff point to create parallel subsystems, and reduce the feedback system consisting of �3 (�) and �3 (�). This result is shown in Figure 5.12 (a). Second, reduce the parallel pair consisting of 1/G2 (s) and unity, and push G1 (s) to the right past the summing junction, creating parallel subsystems in the feedback. These results are shown in Figure 5.12(b). Figure 5.12 Steps in the block diagram reduction ∴ The closed-loop transfer function T(s) = �(�) �(�) G1 (s)G3 (s) 1 + G2 s 1 + G2 (s)H2 (s) + G1 (s)G2 (s)H1 (s) 1 + G3 (s)H3 (s) Question 6 a) For the schematic cruise control system shown in Figure Q6.1, identify the following: the desired speed and the actual speed at the time (t) 2.3 seconds. Draw a functional block diagram for the system, showing all blocks and signals. Given that m is the mass of the vehicle at three different occasions, 1000 kg, 2000 kg and 3000 kg; explain why the time response from the graph is relatively constant. (Make appropriate assumptions.) Ans-At t = 2.3 s Desired speed = 30 m/s Actual speed = 25 m/s A functional block diagram may be drawn by using blocks to represent the functional activities and interconnecting signal lines to represent the information or product output of the system operation. + Desired Actuator Actual Sensor The plot on the right shows the results of this feedback for a step change in the desired speed and a variety of different masses of the car, which might result from having a different number of passengers or towing a trailer. Notice that independent of the mass (which varies by a factor of 3!), the steady-state speed of the vehicle always approaches the desired speed and achieves that speed within approximately 5 s. Thus the performance of the system is robust with respect to this uncertainty. Thus the time response is relatively constant, this is because this particular control system is a closed loop system. Closed loop control systems are robust to a very large change in the vehicle’s characteristics. b) Briefly explain how control systems are classified. Ans-Control systems can be classified based on various criteria, and one common classification is based on their dynamic behavior and structure. Here are the primary classifications: 1. Based on Dynamic Behavior: - Open-Loop Control System: In this type, the output has no effect on the control action. The system does not have the ability to automatically correct errors. - Closed-Loop Control System (Feedback Control System): Here, the output is compared with the reference input, and any difference (error) is used to adjust the system's behavior. This allows for selfcorrection. 2. Based on System Components: - Continuous-Time Control System: The system variables are continuous functions of time. - Discrete-Time Control System: The system variables change only at discrete instants of time. 3. Based on System Linearity: - Linear Control System: The relationship between the input and output is linear. The principle of superposition holds. - Nonlinear Control System: The relationship between input and output is nonlinear, and superposition may not hold. 4. Based on System Time-Invariance: - Time-Invariant Control System: The system parameters do not change with time. - Time-Variant Control System: The system parameters vary with time. 5. Based on System Order: - First-Order Control System: The system dynamics are described by a first-order differential equation. - Second-Order Control System: The system dynamics are described by a second-order differential equation, and so on. 6. Based on System Stability: - Stable Control System: The output remains bounded for a bounded input. - Unstable Control System: The output grows without bound for a bounded input. 7. Based on System Control Signals: - Analog Control System: The control signals are continuous. - Digital Control System: The control signals are discrete. c) For each of the root loci shown in Figure Q6.2, state giving reasons whether or not the sketch can be a root locus. [12+3+5=20 Marks] Ans-i. No: Not symmetric; On real axis to left of an even number of poles and zeros ii. No: On real axis to left of an even number of poles and zeros iii. No: On real axis to left of an even number of poles and zeros iv. No: Not symmetric; real axis segment is not to the left of an odd number of poles v. Yes Question 7 The application of Mason’s gain formula requires a careful understanding of the evaluation of loop gains, forward path gains, etc. State and apply Mason’s gain formula to determine the transfer ratio of �/�� for the system of Figure Q7.1. [20 Marks] Ans-Mason’s gain formula provides a solution technique that is directly applicable to the signal-flow graph, and it is an interesting alternative to a solution technique that requires a matrix inversion. If there is a path (in the direction of arrows) from an input node to all of the dependent variables, Mason’s gain formula will provide a transfer function relating any one of the dependent variables (or a linear combination of dependent variables) to the input. The gain function is expressed as the ratio of X/R1, where R1 must be an input node, and X is any node of interest (other than an input node). An input node is a node with only incoming branches, but X is not restricted to output nodes. The application of Mason’s gain formula requires several other definitions. A loop is a path that begins and ends at the same node without entering any node more than once, and the loop gain is the product of all of the branch functions in the loop. Nontouching loops are loops that have no common nodes. A forward path is a path from R1 to X that does not enter any node more than once, and the path gain is determined by the product of the branch functions in the path. The system in Figure 5.1 exhibits three loops, one pair of nontouching loops, and two forward paths. Beginning with the denominator, ∆ = 1 − − G1 H1 − G3 H2 − G1 G2 G3 H3 + − G1 H1 − G3 H2 . The numerator is obtained by considering forward paths with �1 ∆1 = �1 �4 1 + �3 �2 , and �2 ∆2 = �1 �2 �3 1 . Note that ∆� in each case is a reduced version of the denominator function, and if the forward path touches all of the loops, the value of ∆� reduces to unity. The final result is �1 �4 1 + �3 �2 + �1 �2 �3 1 � = 1 + � �� 1 �1 + �3 �2 + �1 �2 �3 �3 + �1 �1 �3 �2 Question 8 a) State the definition of stability for a linear, time-invariant system using the natural response. Ans-Using the natural response: 1. A system is stable if the natural response approaches zero as time approaches infinity. 2. A system is unstable if the natural response approaches infinity as time approaches infinity. 3. A system is marginally stable if the natural response neither decays nor grows but remains constant or oscillates. b) Sketch the root locus for the unity feedback system shown in Figure Q8.1 for the transfer function. �(�) = Ans-- � �+� � �+� [5+15=20 Marks] END OF MEC 4702 -- VIBRATIONS AND CONTROL ENGINEERING I FINAL DEFFERED EXAMINATION Prepared by: Dr. J. M. Chileshe and Dr. T. Malama Formulas ������ ����� − ������ ������ (2� + 1)� � �� = , �� = , �(�) = #������ ����� − #������ ������ #������ ����� − #������ ������ �� ⅀� � � ∆ � � ⅀� � � ∆ � = �(�) = = ∆ ∆ �� 1 Laplace transform table Item no. 1. 2. f(t) δ(t) u(t) 3. tu(t) 4. �� �(�) F(s) 1 1 � 1 �2 �! �� + 1 1 �+� � 2 � + �2 � 2 � + �2 �−�� �(�) 5. 6. sin ���(�) 7. cos ���(�) Laplace transform theorems Item no. 1 2 Theorem ℒ[f(t)] = F(s) = ∞ 0− f(t)e−st dt ℒ[kf(t)] = kF(s) Definition Name Linearity theorem 3 4 5 6 7 8 9 10 11 12 ℒ[f1 (t) + f2 (t)] = F1 (s) + F2 (s) ℒ[e−at f(t)] = F(s + a) ℒ[f(t − T)] = e−st F(s) 1 s ℒ[f(at)] = F a a �� ℒ = sF(s) − f(0 − ) �� �2 � ℒ = s2 F(s) − sf(0 − ) − f' (0 − ) ��2 n �� � n ℒ = s F(s) − sn−k fk−1 (0 − ) ��� ℒ ∞ k=1 F(s) s 0− f(∞) = lim sF(s) −st f(τ)e dτ = s→0 f(∞) = lim sF(s) s→∞ Linearity theorem Frequency shift theorem Time shift theorem Scaling theorem Differentiation theorem Differentiation theorem Differentiation theorem Integration theorem Final value theorem1 Initial value theorem2 For this theorem to yield correct finite results, all roots of the denominator of F(s) must have negative real parts, and no more than one can be at the origin. 2 For this theorem to be valid, f(t) must be continuous or have a step discontinuity at t = 0 (that is, no impulses or their derivatives at t = 0). 1