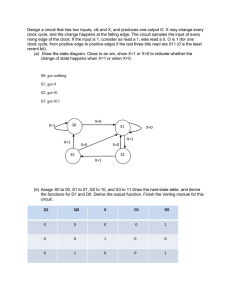
CS256 Digital Design and Computer Architecture 3 Sequential Circuits Recap Suhaib Fahmy suhaib.fahmy@kaust.edu.sa From combinational to sequential ▶︎ The output of a combinational circuit is defined purely as a function of its current inputs ▶︎ Sequential circuits produce outputs that also depend on previous inputs ▶︎ They manifest a form of “memory” ▶︎ The state of a sequential circuit encodes sufficient information about the past to determine its future behaviour in response to inputs CS256 Digital Design and Computer Architecture 2 The need for memory ▶︎ ▶︎ When you worked with algorithms you saw that they consisted of more than just computation functions: ▶︎ Keeping intermediate values between steps ▶︎ Iterating over a collection of items ▶︎ Breaking down a complex computation into smaller simpler ones So in addition to combinational circuits, we need a way to store information to enable us to construct compute systems CS256 Digital Design and Computer Architecture 3 From combinational to sequential ▶︎ Consider two styles of car fan control ▶︎ For the first, I know what state the circuit will be in when I change the knobs ▶︎ For the second, a specific input means nothing without knowing the current state (the display) CS256 Digital Design and Computer Architecture 4 Describing sequential circuits ▶︎ ▶︎ For combinational circuits we use truth tables and equations to define the outputs as a function of the inputs For sequential circuits, outputs also depend on the state of the circuit ▶︎ Usually the output is the state ▶︎ We typically use the letter Q to represent the current state ▶︎ E D Q 0 0 Q 0 1 Q 1 0 0 1 1 1 A state transition table describes what the next state will be based on the previous state CS256 Digital Design and Computer Architecture 5 Timing considerations ▶︎ ▶︎ ▶︎ A We have assumed so far that outputs change instantaneously when inputs change This is not realistic, since signals take time to travel When dealing with sequential circuits this is more important. Y delay A Y Time CS256 Digital Design and Computer Architecture 6 Timing considerations ▶︎ ▶︎ ▶︎ Propagation delay is the maximum delay from the input to the output Contamination delay is the minimum delay from the input to the output These can be different due to various low level factors affecting rise and fall times, different paths, etc. CS256 Digital Design and Computer Architecture A Y tpd A Y tcd Time 7 Timing considerations ▶︎ In a circuit there can be multiple paths from inputs to output ▶︎ The critical path is the longest path from any input to any output ▶︎ We will learn more about how delays affect our design process later Critical Path A B n1 n2 C Y D Short Path CS256 Digital Design and Computer Architecture 8 Timing considerations ▶︎ Consider the below circuit with no inputs and 3 outputs ▶︎ It is astable: it does not stay in one state ▶︎ It oscillates with a period that depends on the inverter delay X X Y Z Y Z 0 1 2 3 4 5 6 7 8 time (ns) CS256 Digital Design and Computer Architecture 9 A simple bistable ▶︎ With an even number of inverters, the circuit would stay in the same state ▶︎ Two outputs, the inverse of each other ▶︎ But no way to control it I2 Q CS256 Digital Design and Computer Architecture I1 Q I1 Q I2 Q 10 The SR latch ▶︎ ▶︎ ▶︎ ▶︎ The simplest circuit for storing a bit of data The R input sets the output to 0 The S input sets the output to 1 When both R and S are deasserted, the circuit maintains its previous output S R Q Q’ 0 0 Q Q’ 0 1 0 1 1 0 1 0 1 1 0 0 “deasserted” Means that a high true (active high) signal is low or that a low true (active low) signal is high. Examples: Signal/Symbol. Logic State. CS256 Digital Design and Computer Architecture 11 The SR latch ▶︎ ▶︎ ▶︎ ▶︎ The simplest circuit for storing a bit of data The R input sets the output to 0 The S input sets the output to 1 When both R and S are deasserted, the circuit maintains its previous output CS256 Digital Design and Computer Architecture S R Q Q’ 0 0 Q Q’ 0 1 0 1 1 0 1 0 1 1 0 0 11 The SR latch ▶︎ The SR latch has a problem when both S and R are asserted then deasserted ▶︎ ▶︎ ▶︎ Q and Q’ are no longer opposites R 1 N1 0 Q 0 S 0 1 N2 0 Q If S and R are both deasserted there is unpredictable behaviour The two outputs begin to oscillate until they settle to a stable output CS256 Digital Design and Computer Architecture 12 The D latch ▶︎ ▶︎ ▶︎ This is a safer element as we can control when inputs are seen by the S and R inputs of the latch As long as EN is low, both R and S are deasserted If we can ensure that EN is only high when only one of S and R is asserted, that prevents the previous issue CS256 Digital Design and Computer Architecture EN EN D S R Q Q’ 0 X X X Q Q’ 1 0 0 1 0 1 1 1 1 0 1 0 13 The D latch ▶︎ The output of a D latch is held while the EN input is low ▶︎ When EN is high, D flows to Q (Q “follows” D) ▶︎ We call this a level-triggered latch clk/en d q CS256 Digital Design and Computer Architecture 14 Constructing a flip-flop ▶︎ ▶︎ The main problem we have with latches is their control/enable/ input affects the output whenever it is high Flip-flops work differently by changing outputs only at a particular instant in time CS256 Digital Design and Computer Architecture 15 Constructing a flip-flop ▶︎ ▶︎ ▶︎ ▶︎ ▶︎ Two opposing latches are coupled so that they are active on opposite edges of the control signal L1 is active/open when CLK is low, while L2 is closed Hence, input data flows in (N1) when CLK is low, but nothing flows out When CLK goes high, L2 is active/open and L1 is closed Hence, whatever is in N1 flows out CS256 Digital Design and Computer Architecture d clk mode n1 q master open slave open master open slave open 16 The D flip-flop ▶︎ ▶︎ ▶︎ ▶︎ ▶︎ A D flip-flop “copies” D to Q or samples D at the moment the control input goes high Otherwise, Q holds its value Q does not change at any time between the rising edges of clock/control This is an edge-triggered flip-flop — it is activated on the clock “edge” Easy to understand when outputs will change CS256 Digital Design and Computer Architecture 17 Flip-flop variants ▶︎ ▶︎ An enable input can be added to decide when to store – important in the design of datapaths ▶︎ EN=1: D passes to Q on the clock edge ▶︎ EN=0: Q retains its value A reset signal can also be added to force the output to zero ▶︎ RESET=1: Q forced to 0 ▶︎ RESET=0: D passes to Q on the clock edge CS256 Digital Design and Computer Architecture 18 Flip-flop variants ▶︎ ▶︎ An enable input can be added to decide when to store – important in the design of datapaths ▶︎ EN=1: D passes to Q on the clock edge ▶︎ EN=0: Q retains its value A reset signal can also be added to force the output to zero ▶︎ RESET=1: Q forced to 0 ▶︎ RESET=0: D passes to Q on the clock edge CS256 Digital Design and Computer Architecture 18 Flip-flop designs ▶︎ ▶︎ Usually we practically build flip flops directly using transistors rather than out of latches This design has two halves: ▶︎ ▶︎ First acts as an inverter when CLK is low placing D’ on D1H and D1L When CLK goes high one of D1H or D1L will enable a transistor that outputs D’’ onto Q’ CS256 Digital Design and Computer Architecture 19 Flip-flop designs CLK = 0 CS256 Digital Design and Computer Architecture CLK = 1 20 Registers ▶︎ ▶︎ ▶︎ ▶︎ A flip-flop stores a single bit each time the clock goes from 0 to 1 A bank of flip-flops with a common clock allows us to store multiple bits We call this a register Registers are essential building blocks in all types of computing circuits CS256 Digital Design and Computer Architecture 21 Register timing ▶︎ ▶︎ ▶︎ d[2:0] Values move from register inputs to outputs at the clock edges Only inputs that are present at a rising edge will reach the output The output will never change in between rising edges CS256 Digital Design and Computer Architecture D Q q[2:0] Clk clk d[2:0] q[2:0] 1 4 6 4 5 6 2 2 22 Shift registers ▶︎ ▶︎ When multiple flip-flops are placed in a chain, this is called a shift register At each rising edge ▶︎ ▶︎ Sin moves to Q0 the values at Q0, Q1, Q2, and so on move along to the right by one position CS256 Digital Design and Computer Architecture 23 Shift registers ▶︎ ▶︎ When multiple flip-flops are placed in a chain, this is called a shift register N clock edges At each rising edge ▶︎ ▶︎ Sin moves to Q0 the values at Q0, Q1, Q2, and so on move along to the right by one position CS256 Digital Design and Computer Architecture 23 FIFOs ▶︎ ▶︎ ▶︎ When we connect registers in the same manner, we have a First-InFirst Out (FIFO) buffer This behaves in the same way as a shift register, but the input, internal signals, and output are multiple bits wide You will see these often in datapath design CS256 Digital Design and Computer Architecture Y D1 Q1 D2 Q2 D3 Q3 D4 Q4 Clk Clk_A clk y[2:0] q1[2:0] q2[2:0] q3[2:0] q4[2:0] 1 Clk_B 4 6 4 5 2 7 0 3 6 2 7 0 4 6 2 7 4 6 2 4 6 24 FIFOs ▶︎ ▶︎ ▶︎ When we connect registers in the same manner, we have a First-InFirst Out (FIFO) buffer This behaves in the same way as a shift register, but the input, internal signals, and output are multiple bits wide You will see these often in datapath design CS256 Digital Design and Computer Architecture Y D1 Q1 D2 Q2 D3 Q3 D4 Q4 Clk Clk_A clk y[2:0] q1[2:0] q2[2:0] q3[2:0] q4[2:0] 1 Clk_B 4 6 4 5 2 7 0 3 6 2 7 0 4 6 2 7 4 6 2 4 6 24 FIFOs ▶︎ ▶︎ ▶︎ When we connect registers in the same manner, we have a First-InFirst Out (FIFO) buffer This behaves in the same way as a shift register, but the input, internal signals, and output are multiple bits wide You will see these often in datapath design CS256 Digital Design and Computer Architecture Y D1 Q1 D2 Q2 D3 Q3 D4 Q4 Clk Clk_A clk y[2:0] q1[2:0] q2[2:0] q3[2:0] q4[2:0] 1 Clk_B 4 6 4 5 2 7 0 3 6 2 7 0 4 6 2 7 4 6 2 4 6 24 FIFOs ▶︎ ▶︎ ▶︎ When we connect registers in the same manner, we have a First-InFirst Out (FIFO) buffer This behaves in the same way as a shift register, but the input, internal signals, and output are multiple bits wide You will see these often in datapath design CS256 Digital Design and Computer Architecture Y D1 Q1 D2 Q2 D3 Q3 D4 Q4 Clk Clk_A clk y[2:0] q1[2:0] q2[2:0] q3[2:0] q4[2:0] 1 Clk_B 4 6 4 5 2 7 0 3 6 2 7 0 4 6 2 7 4 6 2 4 6 24 FIFOs ▶︎ ▶︎ ▶︎ When we connect registers in the same manner, we have a First-InFirst Out (FIFO) buffer This behaves in the same way as a shift register, but the input, internal signals, and output are multiple bits wide You will see these often in datapath design CS256 Digital Design and Computer Architecture Y D1 Q1 D2 Q2 D3 Q3 D4 Q4 Clk Clk_A clk y[2:0] q1[2:0] q2[2:0] q3[2:0] q4[2:0] 1 Clk_B 4 6 4 5 2 7 0 3 6 2 7 0 4 6 2 7 4 6 2 4 6 24 FIFOs ▶︎ ▶︎ ▶︎ When we connect registers in the same manner, we have a First-InFirst Out (FIFO) buffer This behaves in the same way as a shift register, but the input, internal signals, and output are multiple bits wide You will see these often in datapath design CS256 Digital Design and Computer Architecture Y D1 Q1 D2 Q2 D3 Q3 D4 Q4 Clk Clk_A clk y[2:0] q1[2:0] q2[2:0] q3[2:0] q4[2:0] 1 Clk_B 4 6 4 5 2 7 0 3 6 2 7 0 4 6 2 7 4 6 2 4 6 24 Synchronous circuits ▶︎ ▶︎ ▶︎ A synchronous circuit combines edge-triggered sequential elements and combinational logic Breaks cyclic paths by inserting registers that store the state of the system, this changes at clock edges only Rules: ▶︎ Every element is either a register or a combination circuit ▶︎ At least one element is a register ▶︎ All registers receive the same clock signal ▶︎ Every cyclic path contains at least one register CS256 Digital Design and Computer Architecture 25 Counters ▶︎ ▶︎ ▶︎ Counters are important circuits that generate a sequence of outputs in order Usually, this is a rising (or falling) sequence of binary numbers A register’s input is connected to the output of an adder that adds 1 to the register’s output CS256 Digital Design and Computer Architecture 26 Counters ▶︎ ▶︎ ▶︎ ▶︎ The same design can be applied to an arbitrary width of bits The counter will count up to the maximum value (all 1s), then loop back to zero The current count (q) is combinationally added to produce inc At the rising edge, inc becomes q CS256 Digital Design and Computer Architecture 27 Counters ▶︎ ▶︎ ▶︎ ▶︎ The same design can be applied to an arbitrary width of bits inc The counter will count up to the maximum value (all 1s), then loop back to zero The current count (q) is combinationally added to produce inc At the rising edge, inc becomes q CS256 Digital Design and Computer Architecture 27 Counters ▶︎ ▶︎ ▶︎ ▶︎ The same design can be applied to an arbitrary width of bits inc The counter will count up to the maximum value (all 1s), then loop back to zero The current count (q) is combinationally added to produce inc clk q[3:0] inc[3:0] 0 1 2 3 4 1 2 3 4 5 At the rising edge, inc becomes q CS256 Digital Design and Computer Architecture 27 Analysing a sequential circuit ▶︎ Considering the following circuit: CS256 Digital Design and Computer Architecture 28 Analysing a sequential circuit ▶︎ Considering the following circuit: Flip-flops connected in a chain CS256 Digital Design and Computer Architecture 28 Analysing a sequential circuit ▶︎ Considering the following circuit: Flip-flops connected in a chain Internal bits connected so contents can be read Q bits are state CS256 Digital Design and Computer Architecture 28 Analysing a sequential circuit ▶︎ Considering the following circuit: Mux chooses between previous output and D inputs Flip-flops connected in a chain Internal bits connected so contents can be read Q bits are state CS256 Digital Design and Computer Architecture 28 Analysing a sequential circuit ▶︎ Considering the following circuit: D inputs allow data to be loaded into all intermediate postions Mux chooses between previous output and D inputs Flip-flops connected in a chain Internal bits connected so contents can be read Q bits are state CS256 Digital Design and Computer Architecture 28 Analysing a sequential circuit ▶︎ When Load is high at the rising edge, the D inputs go to the Q outputs (like a register) – this is called a parallel load ▶︎ When Load is not high, it behaves like a shift register ▶︎ The Q outputs allow all the bits to be seen at the same time CS256 Digital Design and Computer Architecture 29 Synchronous memory ▶︎ ▶︎ ▶︎ ▶︎ ▶︎ Registers allow us to store a piece of information To be able to store multiple pieces and fetch them, we require multiple registers and a way to share a single data line between them We introduce the concept of an address to allow us to select which location we are interested in When the address is set, the content of that location should be output on the data line A separate signal can be used to control when we are writing (storing) data CS256 Digital Design and Computer Architecture 30 Synchronous memory ▶︎ The number of address bits determines the number of memory locations: ▶︎ ▶︎ N bits means there are 2N locations The number of data bits can be set as required for the application CS256 Digital Design and Computer Architecture 31 Synchronous memory ▶︎ The number of address bits determines the number of memory locations: ▶︎ ▶︎ N bits means there are 2N locations The number of data bits can be set as required for the application CS256 Digital Design and Computer Architecture 31 Synchronous memory ▶︎ The number of address bits determines the number of memory locations: ▶︎ ▶︎ N bits means there are 2N locations The number of data bits can be set as required for the application CS256 Digital Design and Computer Architecture 31 Synchronous memory ▶︎ ▶︎ ▶︎ A memory cell is a single bit storage location This is replicated to create a memory array When the wordline is asserted, all bits on that row are selected The bitlines are used to either output the memory contents or store new contents CS256 Digital Design and Computer Architecture …… …… ▶︎ 32 Types of memory ▶︎ ▶︎ Random Access Memory (RAM) is volatile ▶︎ Can be read and written quickly, but loses information without power or refresh ▶︎ Dynamic RAM (DRAM) stores data in a capacitor ▶︎ Static RAM (SRAM) stores data in cross-coupled inverters Read-Only Memory (ROM) is non-volatile ▶︎ Retains its stored values ▶︎ Modern types like Flash can be written to (but not as fast as RAM) CS256 Digital Design and Computer Architecture 33 DRAM ▶︎ Data bits are stored in on a capacitor ▶︎ Value must be refreshed periodically and after reading ▶︎ Charge leakage degrades value over time ▶︎ Reading destroys the value bitline wordline stored + + bit = 1 CS256 Digital Design and Computer Architecture bitline wordline stored bit = 0 34 SRAM ▶︎ ▶︎ ▶︎ Value is stored in a cross-coupled inverter arrangement and remains until power is switched off bitline bitline wordline SRAM can be written to much faster than DRAM But it has higher area (6T design is 6 transistors per bit) CS256 Digital Design and Computer Architecture 35 Synchronous memory ▶︎ ▶︎ ▶︎ ▶︎ CS256 Digital Design and Computer Architecture The a decoder takes the address and activates a single wordline If writing, values are placed on the bitlines That enables a row of the memory and those values are stored in the cells on that row If reading, the values in the cells on that row are sensed on the bitlines 36 The clock ▶︎ ▶︎ ▶︎ We have seen that synchronous circuits use a clock to control the movement of data over time This is a signal that oscillates between 0 and 1 at a fixed frequency, hence it is like the tick-tock of a clock This is where the MHz and GHz numbers come from – the frequency of the clock clk CS256 Digital Design and Computer Architecture 37 The clock ▶︎ ▶︎ The period of the clock is the time it takes to complete one complete cycle – we call this a cycle The frequency is the inverse of the period: ▶︎ 10ns period = 10x10-9s, 1/10x10-9 = 108Hz = 100MHz ▶︎ 1ns period = 1x10-9s, 1/1x10-9 = 109Hz = 1GHz ▶︎ 4ns period = 4x10-9s, 1/4x10-9 = 2.5x108Hz = 250MHz CS256 Digital Design and Computer Architecture clk 38 The clock ▶︎ ▶︎ The period of the clock is the time it takes to complete one complete cycle – we call this a cycle The frequency is the inverse of the period: ▶︎ 10ns period = 10x10-9s, 1/10x10-9 = 108Hz = 100MHz ▶︎ 1ns period = 1x10-9s, 1/1x10-9 = 109Hz = 1GHz ▶︎ 4ns period = 4x10-9s, 1/4x10-9 = 2.5x108Hz = 250MHz CS256 Digital Design and Computer Architecture clk 38 The clock ▶︎ ▶︎ The period of the clock is the time it takes to complete one complete cycle – we call this a cycle The frequency is the inverse of the period: ▶︎ 10ns period = 10x10-9s, 1/10x10-9 = 108Hz = 100MHz ▶︎ 1ns period = 1x10-9s, 1/1x10-9 = 109Hz = 1GHz ▶︎ 4ns period = 4x10-9s, 1/4x10-9 = 2.5x108Hz = 250MHz CS256 Digital Design and Computer Architecture clk One clock period 38 The clock ▶︎ ▶︎ The source of this oscillation is usually external to the circuit, such as a crystal oscillator In synchronous design, we generally use one clock for all the sequential components in our circuit ▶︎ Hence, the outputs of all those blocks will only update at the clock (rising) edge ▶︎ That way, we can more easily analyse our circuit, and model its behaviour ▶︎ More complex designs might include multiple clocks derived from the same source clock CS256 Digital Design and Computer Architecture 39 Summary ▶︎ ▶︎ ▶︎ ▶︎ ▶︎ In order to build systems capable of implementing algorithms, we need a way to store data Feedback allows us to store state in circuits In modern design, we are usually concerned with synchronous components, where the output changes only at the rising edge of a clock This makes analysing data movement in the circuit much easier than circuits using latches Memories can be constructed to store larger quantities of data in an organised manner CS256 Digital Design and Computer Architecture 40