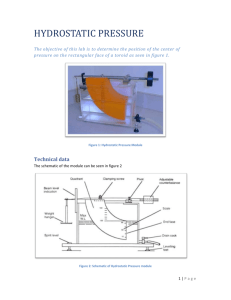
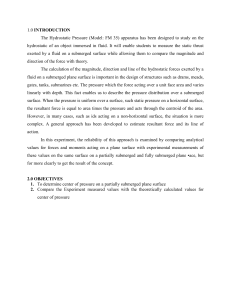
4 Hydrostatic Pressure 4.1 Introduction Fluid statics deals with problems associated with fluids at rest. The fluid can be either gaseous or liquid. In fluid statics, there is no relative motion between adjacent fluid layers, and thus there are no shear stresses in the fluid trying to deform it. The only stress we deal with in fluids statics is the normal stress, which is the pressure, and the variation of pressure is due only to the weight of the fluid. The force exerted on a surface by a fluid at rest is normal to the surface at the point of contact since there is no relative motion between the fluid and the solid surface, and thus there are no shear forces acting parallel to the surface. A plate is subjected to fluid pressure distributed over its surface when exposed to a liquid. On a plane surface, the hydrostatic forces form a system of parallel forces, and we often need to determine the magnitude of the force and its point of application. The magnitude of the resultant force is expressed as, (4‐1) 4.2 Experimental Apparatus A fabricated quadrant is mounted on a balance arm which pivots on knife edges. The knife edges coincide with the center of arc of the quadrant. Thus, of the hydrostatic forces acting on the quadrant when immersed in water, only the force on the rectangular end face gives rise to a moment about the knife edges (forces on the curved surfaces resolve through the pivot and have no effect on the moment). Figure 4.1. Hydrostatic Pressure Apparatus 9 This moment is counteracted by variable weights at a fixed distance from the pivot allowing the magnitude and position of the hydrostatic force to be determined for different water depths. The quadrant can be operated with the vertical end face partially or fully submerged, allowing the difference in theory to be investigated. The balance arm incorporates a weight hanger for the weights supplied and an adjustable counterbalance weight to ensure that the balance arm is horizontal before immersing the quadrant in water. The assembled balance arm is mounted on top of a clear acrylic tank which may be levelled by adjusting three screwed feet. Correct alignment is indicated on a circular spirit level mounted on the base of the tank. A level indicator attached to the side of the tank shows when the balance arm is horizontal. The water level is indicated on a scale on the side of the quadrant. The hydrostatic force at any point on the curved surfaces is normal to the surface and therefore resolves through the pivot point because this is located at the origin of the radii. Hydrostatic forces on the upper and lower curved surfaces therefore have no net effect – no torque to affect the equilibrium of the assembly because all of these forces pass through the pivot. The forces on the sides of the quadrant are horizontal and cancel out (equal and opposite). The hydrostatic force on the vertical submerged face is counteracted by the balance weight. The resultant hydrostatic force on the face can therefore be calculated from the value of the balance weight and the depth of the water In this experiment, mass, m, is added to a balance pan located a fixed distance from the pivot point. The moment formed by the weight, W, acting on the end of this second moment arm of fixed length opposes the moment formed by the resultant force, FR. Mass is added to the pan until the quadrant returns to a balanced position. Summing the moments, M, about the pivot point, the experimental resultant force can be determined. (4‐2) 0 0 (4‐3) (4‐4) where dR is the vertical distance from the pivot point to the resultant force, and dcw is the horizontal distance from the counter weight to the vertical surface. 4.3 Experiment Part 1 – Partially Submerged Surface For a partially submerged surface the distance from the water surface to the center of gravity, hc, is (4‐5) 2 The distance from the water surface to the center of pressure where the resultant force acts, hp, is 2 3 The distance from the surface of the to the top of the quadrant, y, is (4‐6) (4‐7) where L is the distance from the base of the vertical surface to the pivot point and h is the submersion depth. The vertical distance from the pivot point to where the resultant force acts, dR, is 10 (4‐8) The wetted area is the product of the width, w, of the vertical surface and the depth of submersion, h. (4‐9) The nomenclature used to describe the partially submerged quadrant can be seen in Figure 4.2. Figure 4.2. Hydrostatic Pressure Apparatus – Partially Submerged 4.4 Experiment Part 2 – Fully Submerged Surface The nomenclature used to describe the fully submerged quadrant can be seen in Figure 4.3. For a fully submerged surface the distance from the water surface to the center of gravity, hc, is (4‐10) 2 The distance from the water surface to the center of pressure where the resultant force acts, hp, is 1 (4‐11) where the moment of inertia, Ic, is (4‐12) 12 The distance from the surface of the water to the top of the quadrant, y, is (4‐13) where L is the distance from the base of the vertical surface to the pivot point and h is the submersion depth. The vertical distance from the pivot point to where the resultant force acts, dR, is 11 (4‐14) The wetted area is the product of the width, w, of the vertical surface and the height, H, of the vertical surface. (4‐15) Figure 4.3. Hydrostatic Pressure Apparatus – Fully Submerged 4.5 Experimental Setup The balance arm incorporates two locating dowels and a clamping screw for securing the quadrant in the correct position on the arm. The arm pivots on top of the flotation tank via machined knife edges. The balance arm incorporates a locating groove to ensure that the weight hanger is correctly positioned relative to the pivot. Rotation of the counterbalance weight allows it to be moved relative to the pivot, allowing the assembled balance arm to be levelled before immersing the quadrant in water. The flotation tank must be levelled before levelling the balance arm by adjusting the screwed feet. Correct alignment is indicated by a circular spirit level mounted on the base of the tank. A level indicator mounted on the end of the flotation tank shows when the balance arm is horizontal. Water is admitted to the top of the tank by a flexible tube and may be drained through a lever operated cock at the base. The water supply may be obtained from the hydraulic bench or from an alternative source as required. Alternatively, a suitable jug may be used to pour water into the tank. In use the immersed depth of the quadrant is indicated by a scale on the side of the quadrant. Before taking readings, it is important to level the flotation tank so that the knife edges are level from side to side and the level indicator is at the same height as the knife edges. The tank stands on three height adjustable feet to aid levelling. These should be raised or lowered as required until the bubble is central in the spirit level. 12 Before filling the tank with water, it is important to balance the quadrant / balance arm in air by adjusting the counterbalance weight. Assemble the quadrant onto the arm and tighten the knurled screw. Place the arm onto the knife edges ensuring that it is free to move then place the weight hanger in the locating groove at the end of the balance arm. Adjust the position of the counterbalance weight until the balance arm is horizontal, indicated by the central mark on the level indicator. Note that the weight hanger must not be included when calculating the total weights added because the weight of the hanger has been counterbalanced during setup. 4.6 Dimensions of Apparatus The length of the moment arm from the pivot point to the location of the counter‐weight, dcw, is 275 mm. The height of the quadrant face, H, is 100 mm. The width of the quadrant face, W, is 75 mm. The distance from the base of the vertical surface on the quadrant to the pivot point, L, is 200 mm. 4.7 Experimental Procedure 1. Add water to the tank until a depth of 60 mm from the bottom of the vertical end face is achieved. The end‐face of the quadrant should be partially submerged. 2. Determine the mass that results in a moment that restores the quadrant back to a balanced position. Convert the mass in kg to force in N. This will be Wcw. 3. Determine the vertical distance, dR, from the pivot to the point of application of the resultant force for the partially submerged surface. This will be the distance from the free surface of the water plus the distance, hp, from the free surface down to the line of action of the resultant force. 4. Use Equation 1 to calculate the theoretical value of the resultant force. 5. Use Equation 2 to calculate the experimental value of the resultant force. 6. Calculate the absolute error and the relative error. 7. Increase the depth to 80, and 100 mm and repeat steps 1 through 7. 8. Increase the depth to 115 mm from the bottom of the tank. The vertical end face should now be totally submerged. Determine the restoring mass and the distance from the pivot to the point of application of the resultant force. Do not forget to account for the fact that the wetted surface area is now totally submerged. 9. Increase the depth to 130 mm. For each depth, determine the restoring mass and the distance to the point of application of the restoring force. 13 4.8 Data Table 4.1. Hydrostatic Pressure Data h (mm) m (g) 60 80 100 115 130 4.9 Analysis and Reporting Compare the theoretical and experimental resultant force. In your technical report comment on the variation of the resultant force with depth of submersion and comment on and explain discrepancies between the experimental and theoretical results for the resultant force. Be sure to include a free‐body diagram in your technical report. 14