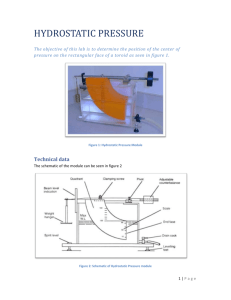
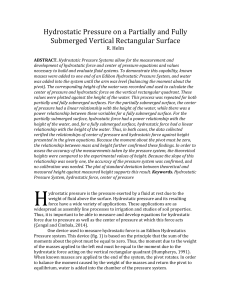
Experiment No. 5 Determination of Center of Pressure And Hydro-static Force on Plane surface Objective: To determine the position of the line of action of the thrust and to compare the position determined by experiment with the theoretical position. Apparatus: Hydrostatic pressure apparatus, ruler, weights, water, scale cylinder. Theory: M g * L = F * h" Where, M : is the mass on the weight hang, g : is the acceleration due to gravity, L : is the length of the balance arm, F : is the hydrostatic force , and h” : is the distance between the pivot and the center of pressure. Fig (2) Fully submerged vertical plane. Where: d: is the depth of submersion F: is the hydrostatic force exerted on the quadrant, h' : is the depth of the center of pressure, h'' : is the distance of center of pressure below the pivot, B: is the width of the surface, and D : is the depth of the surface, W: is the weight on the hanger (=mg). Hydrostatic Force: The hydrostatic force can be defined as: F = (ρg)*A*h Where, A is the area = A = B*d and h = d - (D/2) Therefore: F = ρg*(BD)*[d-(D/2)] ……………………….(1) Experimental Depth of Pressure The moment, M, can be defined as: M = F*h" (Newton-Meter) The balancing moment is produced by the weight, W, applied to the hanger at the end of the balance arm. The moment is proportional to the length of the balance arm, L. For static equilibrium the two moments are equal, i.e. F*h" = W*L = (mg)*L By substitution of the derived hydrostatic thrust, F from (1), we have: h" = (m*L)/[ ρ*B*D ( d-(D/2))] …………………………………….(2) Theoretical Depth of Pressure: The theoretical result for depth of pressure P below the free surface is: h' = (Ic/Ah) + h Where Ic is the 2nd moment of area of immersed section about an axis in the free surface. So : h' = [(D2/12)+(d-D/2)2]/(d-D/2) …………………..(3) The depth of the center of pressure below the surface is : h" = h' + H – d Substituting as before then gives the theoretical result of: 𝐷2 𝐷 2 + (𝑑 − 2 ) + 𝐻 − 𝑑 … … … … … … … . . (4) ℎ′′ = 12 𝐷 𝑑−2 Procedure: 1. Check the bench is leveled properly with the use of spirit level. 2. Add a small mass (typically 50g) to the weight hanger. 3. Get tap water using steel vessel and fill up the flotation tank. 4. Fill the floatation tank with water initially until the balance arm rises. Avoid wetting the balance arm or the quadrant above the water level in the tank. 5. Continue to add water until the balance arm is horizontal, checking this by aligning the flat of the balance arm with the central mark on the level indicator. 6. When the arm is horizontal read the depth of immersion from the scale on the face of the quadrant. 7. Repeat the above procedure for different load increments by adding further weights to the weight hanger. 8. Continue until the water level reaches the top of the upper scale on the quadrant face. 9. Repeat the procedure in reverse, by progressively removing the weights. Calculations and Results Procedure: All readings must be recorded as follows : Constants Height of End Face: D =10 (cm) Width of the End Face B =7.5 (cm) Length of Arm L =25 (cm) Height of Pivot H =20 (cm) Fully submerged vertical plane No. Mass (gm) 1 2 300 400 W*L Depth Force Centroid c. of th act (N.m) d (cm) F(N) Distance press h" (cm) h"(cm) h(cm) distance h'(cm) F*h" (N.m) 0.32 0.98 0.32 0.98 11 13 4.4 5.9 6 8 7.3 9 16.3 16 16.6 16.6 Discussion: What are the reasons for the difference between h"th and h"act . Ans: the differences due to may be the possibility of a human error in reading when the balance bridge arm flat and the balance may be inaccurate in measuring the masses or the possibility that the height value is not accurate if the ruler of measurement is inaccurate