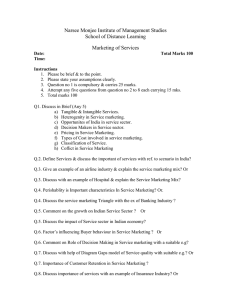
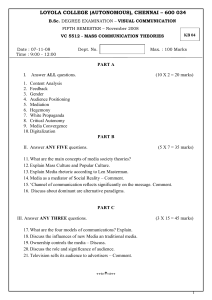
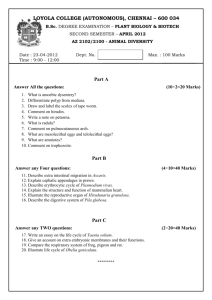
EXAMINATIONS OF May 2014 Code and Name of Course ECNG2009 Control Systems Paper: 1 of 1 Date and Time: Duration: 3 Hours INSTRUCTIONS TO CANDIDATES: 1. 2. 3. 4. 5. 6. This paper has 15 pages and 5 questions. Answer all questions. Questions DO NOT carry equal marks Programmable calculators may be used only if their memories are cleared Linear graph paper is available on request Marks will not be awarded for answers only but for the process used in deriving the answers. 7. Show all working in a clear, legible and organised fashion. 2013/2014 statistics (as at 29-05-2014) Average Stdev Max Min Enrolment Pass Pass% Crswrk/30 18.60 3.96 25 0 98 94 97.84 Q1/40 19.16 6.55 34 3 98 68 70.78 Q2/20 11.83 3.85 20 0 98 86 89.51 Q3/20 9.79 6.21 20 0 98 63 65.57 Q4/20 8.66 4.63 20 0 98 60 62.45 Q5/20 7.06 4.91 18 0 98 45 46.84 Exam/70 33.41 10.18 58 6 98 77 80.14 Total 52.01 12.23 79 20 98 81 84.31 Comments: 1. Historically one of the best class performances 2. Despite comments that the exam was long, and despite the new formats in Qu2 and Qu5, the exam performance was much better than in the past. A significant number of students did better in the final exam than in the coursework! 3. Math grammar is much improved over previous years .. students are writing more statements to explain their solutions.. the Caribbean has hope! 4. English grammar is also much improved .. the Caribbean has hope! 5. Qu2 was very well done … this says a bit about the student’s preparedness for work in industry. I could not understand why some chose to work out the problem using both methods .. .hopefully they were not the ones complaining about the exam being too long! page 2 Q1 (a) Sketch the Root Locus for the unity feedback system of Figure Q1 as K varies. Show all working and clearly indicate all significant aspects (breakaway points, break-in points, asymptotes, angles of departure/entry, j-axis crossings) on the Root Locus 30 marks (b) Using your sketch or otherwise, verify that the points s = -2.8960 ± j10.2380 are closed loop poles and determine the corresponding required value of K. 5 marks (c) Explain why the closed poles in Q1b can be described as “dominant.” Determine the corresponding 5% settling time and percentage overshoot, Mp%. R(s) Y(s) K(s+25) s(s2+8s+116) + 5 marks Figure Q1 (a) 1. Open Loop Poles : s=-4 ± j10, 0. Open Loop Zeros: s=-25 2. PZ Map and Real part of Locus: X -25 -15 Comment [b1]: Even at this stage some are struggling to find the roots of a quadratic polynomial. 10j Most placed the real part of the locus to the left of the zero (-1 Mark) going off to -∞! They were penalised more if the error was not picked up later. They missed the fact that the asymptotes define the zeros at ∞ . X -5 X Comment [DECE2]: Will usually be Included in final map but provides a good check on how the solution is progressing. 2 marks -10j 3. High gain asymptotes: Number of asymptotes = n-m =3-1=2 poles zeros ( 4 10 j 4 10 j 0) ( 25) Centroid: a 8.5 nm 31 ( 2k 1)180o ( 2k 1)180o Asymptote angles: a ( 2k 1)90o =+90o,-90o nm 2 4. Breakaway/Break in points: There are none for K>0 as there is no portion of the locus on the real line between two consecutive poles or two consecutive zeros. 5. Angles of departure (wrt pole at p1=-4+10j): In particular, most RLs that were drawn had the plot nowhere near the asymptotes or crossing the jω axis. In the end they actually plotted part of the locus for K < 0 but never had the pole at s=0 on the locus!. Proper knowledge of the locus would have signalled the error . Comment [DECE3]: 2 marks ea= 4marks Comment [DECE4]: 5 marks with explanation. Some may attempt to calculate the BO/BIN points, thus wasting time … +2marks based on correct formula. Comment [b5]: 8 Marks Geometric Approach: We begin by connecting the pole at -4+10j. We then find the angles these lines make with the positive going real line and apply the formula: Φdp = 180 – (sum anges to poles)+sum(angles to zeros) = 180 –(ϕ1+ϕ2)+θ1 = 180 –(180-tan-1(10/4)+90) +tan-1(10/21) = tan-1(10/4)-90 +tan-1(10/21) =3.67° Algebraic Approach: dp=180-i1arg(p1-pi)+ arg(p1-z1) =180- [arg(-4+10j)+arg(-4+10j-(-4-10j))]+arg(-4+10j-(-25)) = 180- arg(-4+10j)- 90° +arg(21+10j) = 3.67° Lots of errors in identifying and calculating the angles geometrically page 3 Geometric method to determine Φdp 3 s s2 s1 s0 6. We expect j axis crossings as the asymptote is in the RHP. This can be verified via the Routh Hurwitz analysis on the closed loop characteristic eqn: 0 p( s ) ( s 2 8s 116) s K ( s 25) s 3 8s 2 (116 K ) s 25K 1 116+K 8 25K 928-17K 0 5K From this we see that the system is closed loop stable iff 0 ≤ K ≤ 928/17 =54.6. The jω axis poles at K =54.6 are obtained by solving the auxiliary equation derived from the s2 row with K=54.6: 8s2+25K= 0 s=± √ (25K/8) = 13.1 rad/s Alternative: substitute s=jω in the characteristic equation and solve (ω must be real and K must be > 0): 0 p ( s ) j 3 8 2 j (116 K ) 25K Equating real and imaginary parts to 0: -8ω2+25K = 0 ω = 25 /8 or K=8ω2/25 8 3 (116 K ) 0 3 (116 8 2 / 25) 0 116 0 25 Hence 0.68 116 0 ω = 0, or ω = 116/.68 =13.1 rad/s 7. Locus plot Comment [DECE6]: 8 marks Many got this section right using the other method. Mostly errors in calculations page 4 Comment [DECE7]: 3 mrkas Most who got to this stage did not draw the plot properly (b) The closed loop characteristic eqn is 1+KG(s)= 0 K=-1/G(s)|s= -2.8960 +j10.2380 = 9.9977 j0.0026 which is quite close to the positive real line. We can ignore the effects of numerical error (and inaccuracies in pole value) which generate the non-zero imaginary part. This shows that both the magnitude and angle conditions are satisfied. This suggests that the pole pair indicated are on the root locus or close enough to it to be considered as being on the locus. K ≈ 10. Comment [DECE8]: 5 amrks. 2 marks if correct solution path indicated. Any approach based on the plot sketch is incorrect .. it has to be verified by calculation as shown Alternative (harder) method: Use the angle and magnitude conditions. (c ) The pole at -2.8960 +10.2380i is the only complex pair at the gain calculated. By definition the dominant pole pair are the complex poles closest to the jω axis so this therefore justifies the description. The settling time is ts = 3/2.896 =1.04 secs and the overshoot is 100e-π (2.896/10.238) = 41.1% 8 Mks Q2 (a) Discuss the rationale in using the terms “reset time,” Ti, and “rate time,” Td as alternatives to the integral and derivative gains of a PID controller. 12 Mks (b) Design a three-term PID controller that would give accurate setpoint control of a heat exchanger with transfer function . Specify the controller P, I and D gains. In addition, express these as Proportional Band, Integral Time and Derivative Rates respectively. Ziegler-Nichols tables are provided in Tables 2a and 2b. The unit step response for the system is shown in Figure Q2 (a) The significance of the reset and rate times are explained as follows: The PID controller is: C ( s ) K p K i K d s K p (1 1 Td s ) s where: Kp := Proportional Gain Ti s Comment [b9]: 5 marks = 2+1+1 +1 One mark for formulae for ts, Mp. Many took the 5% as an Mp spec.‼ Most did not capitalise on the fact that ts = 3/Re(pole). page 5 := Integral Gain :=Derivative gain Ki Kd Ti Td := Reset Time =Kp/Ki := Rate time or derivative time =Kd/Kp The reset time is the time taken for the integrator term output to equal the proportional term output in response to a step change in input applied to a PI controller. Kp+Ki∫(.)dt E Comment [b10]: Full marks awarded for stating as per bulleted points, even w/o the drawings KpE KpE Ti It therefore gives an indication of how fast the integral action achieves setpoint regulation. The rate time is the time taken for the proportional term output to equal the derivative term output in response to a ramp change input applied to a PD controller. Kp+Kdd/dt (.) KpTdE KpTdE u(t)=Et Td It therefore gives an indication of how fast the system response in reaching steady state. (b) 1 40 2 3 6 The student can use either the 1st or second methods Solution 1: The Ziegler-Nichols second method is as follows Using only proportional feedback control Kp: Step 1. Increase Kp from 0 to some critical value Kp=Kcr at which sustained oscillations occur. Step 2. Note the value Kcr and the period of sustained oscillation, Pcr Step 3. Select gains from table Comment [DECE11]: 5 marks (step 3 is 3 marks, 1 per gain) Step 1: We can determine the limiting gain for stability (before oscillations) by use of the RouthHurwitz condition. The characteristic equation with Proportional control is: 1 KG ( s ) 0 ( s 1)( s 2)( s 3)( s 6) 40 K 0 Comment [DECE12]: 2 marks p ( s ) s 4 12 s 3 47 s 2 72 s 36 40 K 0 The Routh array is 1 12 41 2520 480 36 40 47 72 36 40 0 36 40 0 From this we see that the range of K > 0 for stability is 2520 480 >0 => K< 5.25 36 40 >0 => K>-0.9 When K is increased to the maximum of 5.25, we have imaginary roots since the s1 row is identically 0 and the s2 row defines the auxiliary eqn. Comment [DECE13]: 3 marks for determining stability range and Kcr This then indicates that oscillation will occur as K 5.25 at a frequency determined by the auxiliary equation resulting from the above. This can be used to determine Pcr. Step 2: The corresponding Auxiliary equation is 41s2+36+40K=41s2+246= 0 Which has roots at s = j√6. Since this is a quadratic factor of the characteristic polynomial => the sustained oscillation at the limiting value of K, Kcr, is at √6=2.45rad/s. Thus, Pcr =2π/√6= 2.57 sec and Kcr = 5.25. This gives: Step 3: Time formulation from table: Kp = 0.6Kcr = 3.15; Ti= 0.5Pcr = 1.29 sec; Td = 0.125 Pcr = 0.32 sec Gain Formulation Comment [DECE14]: 2 marks this step Comment [b15]: Errors in drawing tangent at point of inflexion! The curve should be on opposite sides of the tangent line at the point of inflexion. Errors in determing L, T. page 6 Kp = 3.15, Ki = Kp/Ti = 3.15/1.29 = 2.46, Kd = KpTd = 3.15 × 0.32 = 1.01 PB=100/Kp = 31.7% Solution 2: By drawing the tangent to the line of inflection of the step response, we obtain the parameters: Delay time, L = 0.6 sec, time constant, T = 2.3 sec. From the table the PID parameters are: Time Formulation Kp = 1.2 T =1.2×2.3/0.6 = 4.6; Ti = 2L = 1.2 sec; Td = 0.5L = 0.3 sec Comment [b16]: Need to show how derived from the table:5 marks Comment [b17]: 3 each L Gain Formulation: Kp = 4.6, Ki = Kp/Ti = 4.6/1.2 = 3.83, Kd = KpTd = 4.6× 0.3 = 1.38 Comment [b18]: 3 each PB = 100/Kp = 21.7% Comment [b19]: 1 mark page 7 Q3 Figure Q3 shows the block diagram for a servomechanism system used in the aircraft industry. The external system variables are the reference signal, R(s), disturbance input, D(s), and the aileron position variable, Y(s). Use Mason’s formula to determine simultaneous effect of inputs R(s) and D(s) on the output Y(s). 20 marks The composite output is given by Y(s) = TYR(s)R(s) + TYD(s)D(s) Where TYR(s) and TYD(s) are the transfer functions from R and from D respectively. They must be obtained individually. Using Mason’s method to find TYR(s): Loops: L1 = -G1G2G3G4H4 L2 = -G1G5G4H4 L3=-G2G3G4H1 L4= -G5G4H1 L5= -G3G4H2 Comment [b20]: Most challenging part was getting loop formulae for loops including G5 and in determining cofactors for forward path from D(s) Comment [b21]: 1 Mark each = 5 marks Touching loop sets: All loops touch (share a gain term, i.e. G4) Network determinant is Δ = 1 – (L1+ L2 + L3+ L4+ L5) =1+ G1G2G3G4H4+ G1G5G4H4 + G2G3G4H1 + G5G4H1 + G3G4H2 Comment [b22]: 1 Mark Path Gains P1 = G1G2G3G4 Comment [b23]: 1 mark each = 2 marks P2 = G1G5G4 Subdeterminants Δ1 = 1 as all loops touch P1 Δ2 = 1 as all loops touch P2 Hence Δ Comment [b24]: 2 Mark … explanation must be given Δ Δ 1 G G G G H G G G G G G G G G G H G G G H Comment [b25]: 2 marks G G H G G H Using Mason’s method to find TYD(s): The Loop and determinant gains are as before Path Gains PD1 = 1 Comment [b26]: 1 Mark Subdeterminants Δ1 = 1 as all loops touch PD1 Comment [b27]: 1 mark Hence Δ Δ 1 1 G G G G H G G G H Comment [b28]: 2 marks G G G H G G H Hence Y(s) = TYR(s)R(s) + TYD(s)D(s) G G H Comment [b29]: 4 marks Rs Ds page 8 Q4 Figure Q4a provides a Bode plot for an open loop system with transfer function KG(s) for K=1. Figure Q4b shows the open loop Nyquist diagram for the same system. Note that the plot is annotated with eighteen (18) test frequency markers (in rad/s) at selected points. The points progress from the rightmost position of the plot in a clockwise direction. It is known that G(s) is stable with no zeros. Answer the following questions using only the information determined from the diagrams: 2 Mks 9 Mks 2 Mks (a) What is the order and system type of G(s)? Explain (b) Determine the gain, phase and delay margins for gain K = 1. (c) What is the maximum positive gain, K, for which the system is stable? (d) How many right half plane poles are there when K exceeds this value? Explain. (e) Using a linear frequency scale on the graph paper provided, plot the frequency response of the closed loop system. (f) Comment on the graph obtained (bonus) 2 Mks 5 Mks 4 Mks (a) As there is no zero, all contributions to the high frequency phase comes from the poles. As each pole contributes a high frequency phase of 90° and the high frequency phase is 360° = 4 × 90°, the order is n=4. As the low frequency phase is 0° there are no integrators in the transfer function. Hence the system type is 0. (b) From the Bode plot , GM = 1dB PM = 10° = 0.1745 rad Gain Crossover is ωg =0.95rad/s. Hence the Delay Margin is DM = PM(rad)/ωp =0.1745/0.95 = 0.184 sec (c) By definition Kmax = GM = 1dB =1.12 (d) The number of encirclements change by 2 when the gain increases so that the Nyquist plot encompasses the critical point. Hence there will be two RHP poles (e) Data points are as follows Gain dB ω, rad/s Comment [b30]: 3 marks for this ‐2.2 ‐2 0 2 4 6 10 20 10 6 4 2 0 ‐2 ‐4 ‐6 ‐10 ‐20 0 0.15 0.48 0.62 0.71 0.78 0.86 0.95 1.06 1.11 1.15 1.19 1.24 1.29 1.35 1.44 1.64 2.4 The plot is shown below page 9 Comment: The high resonant peak suggests that the system is close to instability. This is consistent with the low relative stability margins obtained. page 10 Q5 A DC Motor has transfer function . It is desired to design a controller to satisfy the following specifications: 1. Perfect setpoint tracking of joint position 2. Steady state velocity error of 5% 3. Min phase margin: 30o (a) Show that a proportional controller can be used to achieve the first two specifications (b) Design a lead or lag compensator to complement the proportional controller so as to achieve all specifications. Bode plots for the open loop system are provided in Figure Q5. 6 Mks 14 Mks (a) This is shown by the following: Spec 1:AS the open loop plant includes an integrator (and is ∴ a type 1 system), perfect setpoint tracking will occur with a proportional controller. NB: System is CL stable as it is second order with positive coefficients with a positive Kp Comment [b31]: Many closed the loop and showed a CL DC gain =1. Acceptable but time wasting Many got Kv but did not state a conclusion, i.e. that a K can be found to give required Kv = 20. Spec 2:The resulting forward loop will remain Type 1 and all type 1 systems exhibit ramp errors that are finite. In fact, in this case the unit ramp error is, for proportional controller Kp=K = 1/ lim , → Hence, e = 1/K so that for e = 0.05 K= 1/0.05 =20 = 26dB. Hence we can solve for a proportional controller to meet the second spec. (b ) WE will use a lead compensator Gc ( s ) K c 1 s s z T , α<1 Kc 1 s p s T We proceed using the proportional controller applied to the old plant as our new plant. We need to check the NEW relative stability margins with this value of K=26dB. This can be obtained by redrawing the graph 26dB higher or by compensating our measurements appropriately by 26dB on the cyrrent grap. We obtain an infinite gain margin (as the phase never reaches 180° ) and a phase margin of only 18o with a gain crossover frequency of ≈ 6 rad/s. (checked at current plot when |G| = -26dB) We will attempt to use the Lead Compensator to add a phase lead of at least *= (30-18)o+5o=17o o allowing a 5 tolerance. This will be the maximum phase in the phase response of the compensator. We can use this value to determine the compensator parameters as follows: Solving for , we note that the lead compensator satisfies 1- = 2tan* 1-2+2=4tan2* 2-(2+4tan2*)+1=0 The roots are = 1.8263, 0.5475. Since for a lead compensator <1, choose =0.55. For a DC gain of 1 (so as to preserve the static error specs), our compensator requires a gain of : Kc = 1/ = 1.83 The gain of the compensator at the frequency, ωm , corresponding to the peak phase response is 1 1 Gc ( jm ) K c =20log(-1/2)dB We will try to find the location in frequency where the open loop has the inverse of this gain so that when paced in cascade, the overall gain at this frequency will be 0dB. WE therefore need the frequency at which the uncompensated OL plant gain is 20log(1/2)dB = -2.6dB (-28.6dB on original plot). This is Comment [b32]: Flawless calculation plus good explanation – full marks Flawless calculation with no or little explanation - (4) 7 marks if demonstrates a good understanding of the process even if there were errors in judgment and calculation Comment [b33]: 1.Many did not work with new |G| shifted up by 20logK. 2.Many correctly got K=20 but thought that the mag plot was “already corrected” as it started at 20dB! The mag plot can start anywhere on the frequency spectrum but also some students mistook K=20 to be 20B 3.Many correctly calculated gain adjustment as x20 =26dB but adjusted by 26-20dB =6dB (as the system already had a 20dB gain as shown at leftmost intercept‼) 4.For those with the errors above, when PM obtained as >30°, proceeded to use a lag compensator to lower to 30° ‼ Why lower PM at all? In any case the spec says PM ≥ 30° .. this should have signalled that the solution was in error 5.More than a couple of students used 10log(x) for signal dB calculation instead of 20log(x)! 6.Wrong result in getting (1-α)^2‼ E.g. (1-α)^2 = 1+α^2 etc. 7. page 11 where we will place the maximum phase of the compensator response. By inspection of the Bode plot this is at *7 rad/s. This will be ωm, the frequency at which the compensator phase is maximum. Setting m= *=7rad/s, we obtain from ldc2, T=1/ (m)= 0.193sec. The compensator is 0.193s 1 s z s 5.19 Gc ( s ) K c 1.83 1.01 s p s 9.44 0.106s 1 The overall controller is C(s) =KGc(s) = 36.6 s 5.19 s 9.44 page 12 Tables & Figures PID Type P Kp PI 0.9 T PID L 1.2 T L T L Ti=Kp/Ki ∞ Td=Kd/Kp 0 L 0.3 0 2L 0.5L Table 2a: Ziegler-Nichols Recipe – First Method PID Type P PI Kp 0.5 K cr 0.45 K cr PID 0.6 K cr Ti ∞ Pcr 1 .2 Pcr 2 Td 0 0 Pcr 8 Table 2b: Ziegler Nichols Recipe – Second Method Figure 2c: System Step Response page 13 Figure Q3 Figure Q4a page 14 ω=2.40 ω=0.62 Frequency Markers: 0.00 0.51 0.62 0.71 0.78 0.86 0.95 1.01 1.06 1.11 1.15 1.19 1.24 1.29 1.35 1.44 1.64 2.40 ω=0 ω=0.51 Figure Q4b: Nyquist Plot Lead Compensator Transfer Function Gc ( j ) K c Lag Compensator Transfer Function 1 s s z T , α <1 Kc 1 s p s T Phase response peak frequency m pz 1 1 s s z T Kc 1 s p s T Phase response peak frequency m p z T Peak phase angle 1 tan m 2 Gain magnitude at ωm. Gc ( jm ) K c G c ( j ) K c 1 T Peak phase angle 1 tan m 2 Gain magnitude at ωm. Gc ( jm ) Kc 1 Table Q5 Figure Q5 Detach and submit with answer booklet END OF QUESTION PAPER , β >1