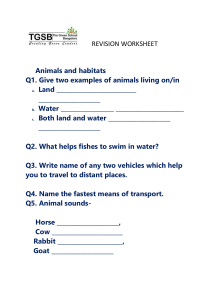
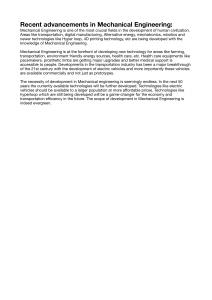
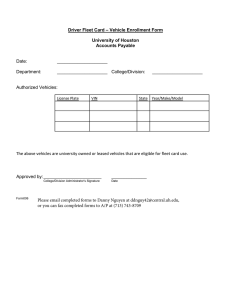
A Probabilistic Neural Network-Based Road Side Unit Prediction Scheme for Autonomous Driving Noura Aljeri and Azzedine Boukerche PARADISE Research Laboratory EECS, University of Ottawa Ottawa, Canada nalje094@uottawa.ca,boukerch@site.uottawa.ca Abstract—Vehicular Networks will play a leading role in the next generation of Autonomous Driving (AD), as recent advances in vehicular networks are a promising solution for traffic management and congestion issues, as well as lane optimization. Wireless mobile communication in VANETs is essential for the content delivery of local and global information for intelligent operation decisions in autonomous driving control applications. However, the vehicles’ high mobility and topology changes affect the performance of traditional mobility management protocols over VANETs. Therefore, an efficient mobility management solution that mitigates the challenges of vehicles’ mobility is needed to support autonomous driving. In this paper, we present an efficient probabilistic neural network-based Road Side Unit (RSU) prediction scheme for autonomous driving control using vehicular networks. We evaluate the performance of the predictor against different machine learning models. Our results showed a high accuracy rate in comparison to several neural network models in various mobility environments. I. I NTRODUCTION In recent years, most automotive companies have moved toward the development of new intelligent vehicles that offer autonomous driving control features. That includes adaptive cruise control, emergency braking, navigation, collision warning systems, automatic parking, and more [7]. Thereby, providing safety on road and efficient traffic management solutions. Nevertheless, several challenges arise when dealing with autonomous driving [9], such as localization, surrounding sensing, and most importantly reliable communication. These challenges require accurate and efficient communication between vehicles and vehicles to roadside units to obtain reliable information for decision making. Vehicular networks provide the basic building block of such communications by connecting vehicles, infrastructures, and any device together [8]. The development of IEEE 802.11p and numerous routing protocols attempt to handle the rapidly shifting network topology and the high mobility of vehicles [14]. Nonetheless, vehicles’ connectivity through RSUs frequently changes, due to the higher speeds and varying network topologies within vehicular networks. Thereby providing vehicles with reliable and seamless services is a difficult problem. Researchers proposed several solutions to cope with the dynamically changing topology and high mobility of vehicles in VANETs, by integrating different type of wireless access networks, to provide reliable and QoS services for autonomous vehicles. However, traditional wireless access networks such as IP, LTE, and DSRC require periodic communication updates and registration with RSUs equipped with Access Routers (ARs). Hence, yield high latency and data delivery disruption during transitions between RSUs. Therefore, autonomous driving control will face difficulty in providing satisfactory services to drivers and safety applications. The benefits of using wireless networks can be improved by proactively estimating the vehicles’ trajectory and upcoming transitions early enough to initiate registration and allocating resources ahead of time. Consequently, providing a seamless transition and low latency in the process. Several prediction methods can be applied to estimate the vehicle trajectory and transition such as probability analysis [17] and movement estimation [11]. Where the latter predict future locations by using temporal data of the vehicles’ current movement, yet it yields low accuracy with similar probabilities and adds complexity and overhead to the network model. Whereas, probability analysis deal with the probability relationship between variables and potential ARs, which suffers from low accuracy when sudden movement changes and misleading behavior occur. Machine Learning (ML) is another solution to predict the vehicles’ mobility, where various data can be collected from the network, to derive a prediction. Two types of ML can be used depending on a given problem: supervised learning (classification and regression), and unsupervised learning (clustering and rules extraction) [22]. Since the vehicles’ mobility measurements, such as location, speed, direction, and current AR, can be extracted from the communication packets and the access router identification is available, a supervised classification learning mechanism could be easily adapted for such prediction purposes. The goal of the classification task is to develop a model from a set of observations capable of predicting the next AR (i.e., Class) of a given unseen dataset. In this paper, we focus on enhancing the performance of vehicular networks connectivity by predicting the vehicles’ upcoming AR connection. Thereby, providing seamless mobility for Autonomous Driving Control, through low computational time and high prediction accuracy. For this purpose, artificial neural-based network solutions are preferred over movement estimation models [23]. However, each neural network model Fig. 1: Mobility Management in connected cars: illustrative example has its strengths and weaknesses, depending on the characteristics of the data set. In this work, we adopt a Probabilistic Neural Networks (PNNs) classification model to estimate the next most probable AR transition given the vehicles’ mobility characteristics. In general, PNNs classification is very much faster than the well-known backpropagation paradigm. Besides, the output of PNNs provides not only a binary decision of the AR class, and yet a probability matrix of all classes. Therefore, it will be effective in case of false prediction, in which the next most probable AR class will be used as a fallback solution. Furthermore, we evaluate the accuracy and computational time of PNNs in comparison to several neural network models in forecasting the vehicles’ next AR connection. The remainder of this paper is organized as follows. In Section II, we review current research work toward predicting vehicles mobility. In Section III, we present the problem statement and preliminaries. Followed by a detailed description of the PNN model in Section IV. The simulation experiments and performance evaluation in Section V. The conclusion and future directions are discussed in Section VI. II. R ELATED W ORK In general, we can classify mobility prediction into three categories: probability analysis, movement estimation, and pattern matching. Magnano et al. [17] proposed a predictive solution for handover management in VANETs, which combines both probability analysis and movement estimation solutions. The proposed model uses a Kalman filter to track the vehicles’ movement, and a hidden Markov model to predict the next access point probability. One example of pattern matching can be found in Hu et al. [18], where partial trajectories are matched to determine the vehicles’ future location. The cost of comparing a vehicle’s trajectories to an entire database is inefficient in time-sensitive applications. Wickramasuriya et al. [12] proposed a predictive method based on Recurrent Neural Network (RNN) to estimate the next base station that a mobile node will connect with in 5G wireless networks in . Their dataset composed of sequences of Received Signal Strength (RSS) values. Each series of data is trimmed to the last 150 RSS values before the next transition of base stations occur. With a total of 70,000 sequences, their results showed 98% accuracy for an 8-class sequence. Fazio et al. [13] proposed a pattern prediction algorithm for handover management based on Markov theory. Where they combine a distributed hidden finite state Markov chain and the vehicles’ traveling path to estimate the next potential AP. However, false predictions are possible when two vehicles share the same path and yet connect to two different APs. Pazzi et al. proposed a similar approach in [20], using the vehicles’ location history within AP coverage and a hidden Markov model to estimate the next possible AP. Sadiq et al. [21] introduced an intelligent network selection schema to improve the prediction of the next possible AP by using three parameters: Signal-to-Noise Ratio (SNR), Residual channel capacity, and connection lifetime. Thus, the connection lifetime is measured according to the vehicles’ movement estimation, identifying the lifetime between each vehicle and an AP. However, their approach did not consider changes in vehicles’ movement and speed. Several works have been done toward predicting user positions and handover in Mobile Networks. A machine-learning based handover prediction is proposed in [16] for Wifi networks. Feltrin et al. used the received signal strength indicator. In [15], Theodoros et al. provided a performance evaluation of supervised learning based location prediction scheme and validated their results with a set of real-world and synthetic user location trajectories. However, their results were limited to pedestrians movement and not vehicular networks mobility. III. P RELIMINARIES AND P ROBLEM S TATEMENT Ubiquitous connectivity is a critical requirement for autonomous driving. Autonomous cars must be connected in order to be smart [19]. Connectivity will enhance contextual awareness, which will, in turn, improve the performance of autonomous driving. In this regard, infrastructure wireless networks will be essential for providing high coverage and reliable communication for autonomous driving applications. However, due to the high vehicular mobility, the performance of traditional mobility management protocols over VANETs will be affected, which will have further implication on time-sensitive applications. In this section, we introduce the problem and the interrelated assumptions in detail. Mobility handover process relates to the maintenance of a mobile vehicle node (VN) connection while it switches between two points of access. When a VN establishes a connection with a new foreign agent network (nFA), communication with its previous agent (oFA) will be distributive. VNs will then initiate the discovery phase of finding an alternative network by either listening for FA broadcast messages or a vehicle sending a solicitation message. After the FA discovery b: Algorithm flowchart a: Architecture Fig. 2: Probabilistic Neural Networks process is established, vehicles will then obtain a new Care-ofAddress (CoA) and initiate the registration phase, in which the nFA will inform oFA about the vehicles transition and request data packets forwarding to its region. During this process, communications between the vehicle and any corresponding node service (CN) is disrupted. An illustrative example of mobility management design in connected networks is presented in Figure 1. In wireless vehicular networks, vehicular mobility is bounded by road lanes and speed limit cap, in which we assume a vehicle will not change its direction and speed for a specific λ time. In our model, we concentrate on the communication between vehicles and roadside units, where each vehicle is equipped with onboard GPS (Global Positioning System) receiver. Therefore, vehicles can periodically record their geographical location. During the handover process, vehicles are responsible for calculating their directional angle using the location data provided by the GPS as follows dirx = currx − prevx diry = curry − prevy (1) θ = atan2(diry , dirx ) When a vehicle discovers a new AR, it initiates the registration phase, in which vehicles send a binding update packet to its oAR through the nAR. The vehicles’ oAR will then reply with a binding update acknowledgment packet and start tunneling and routing data packets to the vehicles’ new AR. Meanwhile, vehicles will keep sending location update packets to the nAR. Along with the update packet, vehicles will also send their corresponding location, speed, and direction. The received updates will be processed by the AR to determine to vehicles’ future trajectory and transition. As aforementioned, ARs will periodically obtain vehicles movement observations and the current AR associated with the vehicles’ measurement. These data will be used for the training and testing of the PNN model. Each movement observation entry is assigned to a specific AR class from a fixed set of classes. In the following, we describe the probabilistic neural network model in detail. IV. P ROBABILISTIC N EURAL N ETWORKS S CHEME A Probabilistic Neural Network (PNN) is a feedforward neural network proposed by Specht [6], which uses radial basis function as activation functions in the hidden layer to make a local decision. PNNs have shown promising results for classification problems [1], [4], [5], where local minimums problem does not affect the decision of a PNN. The PNN is inspired by Bayesian networks [3] and Kernel Fisher discriminant analysis [2]. Given that the standard training procedure of a PNN requires a single pass over all the patterns in the training set. PNN has faster training than multilayer perceptron networks. It also yields accurately predicted target probability score, and it is generally insensitive to outliers [4]. The architecture of a PNN is depicted in Figure 2a. It has four layers: an input layer, pattern layer, summation layer, and output layer. The input layer consists of n neurons, one for each of the n input features of an input vector x = (x1 , .., xn )T ∈ Rn . It distributes the input to the pattern layer’s neurons. The pattern layer’s neurons are partitioned into k sets, one for each class in the training set. The ith pattern neuron in the k th set computes its output as follows: Fk,i (X) = ||X − Xk,i ||2 1 exp(− ) 2σ 2 (2πσ 2 )n/2 (2) where xk,i ∈ Rn is the kernel’s center, and σ is the adaptable spread parameter. When the value of the spread parameter is close to 0, it resembles the nearest neighbor classifier of several training samples. The summation layer has c neurons, one for each class. It adds the output from the pattern layer’s neurons of a given class. Each neuron in the summation layer estimate a class conditional probability density function via a combination of previously computed densities: Gk (X) = Mk X wki Fk,i (X), k ∈ 1, ..., K (3) i=1 where Mk is the number of pattern P neurons of class k, and wki Mk is a positive coefficient such that i=1 wki = 1. The output layer classifies an input vector, x, based on the maximum probability obtained using Bayes’ theorem. C(X) = arg max (Gk ) (4) 1≤k≤K Hence, the class with the highest probability is assigned 1, and the other classes are set to 0. The spread parameter is critical for the classification accuracy of the PNN. To find the best value of the spread in the PNN, the parameter may be varied from 0.1 to 2 over different mobility scenarios as seen in Section V-C. In the context of vehicles’ mobility and handover process in VANETs, each vehicle observation data xi is clustered according to the next AR class value Gi = [1, 2, 3, .., m]; Where m is the number of ARs placed in the network. The input vectorX comprise multiple vehicle features including location, speed, and directional angle. The dataset will be then fed to the PNN model for training and testing as illustrated in Figure 2b. TABLE I: Dataset sample. Locxt 6766.1 6753.6 6740.7 6716.4 6703.6 6690.7 6678.3 .. Locyt 3143.9 3139 3134 3124.5 3119.6 3114.5 3109.7 .. .. Speed(m/s) 27.29 27.29 26.92 26.92 27.51 27.51 26.69 .. .. Direction θ E E E EW EW W W .. .. AR class 15 15 15 16 16 16 16 .. .. V. P ERFORMANCE E VALUATION In this section, we evaluate the performance of the probabilistic neural network model in predicting an AR class. We first describe the datasets, mobility environment and evaluation metrics of the experiments. Then we optimize the PNN parameters to fit our model accurately. Finally, we compare the PNN prediction model against three different classification algorithms (Support Vector Machine (SVM), Decision Tree, and k-Nearest Neighbor (kNN) under diverse parameter settings, and report the most robust classifiers. Support vector machine [24] is based on statistical learning theory, in which it adopts the structural risk minimization principle. As for the Decision Tree classifier, instances are classified based on feature values Fig. 3: Sample location dataset feature for one class ARi in Urban environment. [24]. The kNN is based on the proximity of each instance to other instances with similar features [25]. We evaluate our model using MATLAB R2017, on 2.4 GHz Intel Core i7 machine. The gathered datasets were simulated in NS-2 using Ottawa City map, for both urban and highway environments. Simulated vehicles mobility is generated through SUMO with an average speed between 030m/s and Krauss car-following model. We deployed ARs in both environments to maximize area coverage. Each AR have a communication range of 250m. We first collect each vehicles’ measurements and their AR connection periodically. Then we process the gathered data of each vehicle by transforming each dataset to features and targets. Finally, we train the network in an offline mode and then perform the testing on an unseen dataset. A sample of our dataset is presented in Table I, and an illustrative example of one AR class associated data feature is shown in Figure 3. Our dataset contain of four input features and one target class (i.e. AR class), in which the input features consist of the vehicles’ location, speed and direction. In order to evaluate the accuracy of a classifier, several techniques can be used. One method is to split the dataset into training and prediction. In another method, cross-validation, which divides the dataset into equal-sized subsets and each subset are trained on all the other subsets. The average of multiple rounds of cross-validation is derived from giving an estimate of the predictor accuracy. In our test, we use the dataset splitting technique to calculate the prediction accuracies of each classifier. To fully utilize the neural network model, we first need to optimize both the smoothing parameter and data features. In Figure 4, we evaluate the influence of spread selection on PNN for AR prediction. We choose a spreading interval between 0.1 and 1, where we illustrate the resulted accuracies in Figure 4. We found that the best value obtained by each data division is between 0.4 and 0.6. The optimum set of features that represent the vehicles’ characteristic is evaluated, where the accuracy of different feature sets is tested as seen in Figure 5. The results indicated Fig. 4: Spread optimization with respect to data division ratio. Fig. 7: Prediction of vehicles’ AR class. Fig. 5: Different features accuracies for Urban dataset. the training time of PNN, SVM, Decision Tree, and kNN with different percentages of dataset number. The kNN and Decision Tree showed the lowest computational time in comparison to PNN and SVM. Moreover, PNN illustrated an average of 40s in training time. A sample of the target AR classes of both real and predicted target classes in Figure 7. In Figure 8, we compare the performance of multiple classifiers techniques in term of data division for both urban and highway environments. As seen, the accuracy of PNN outperform all other classifiers in different dataset divisions. Moreover, it is noted that even though kNN showed lower computational training time, it did not exhibit higher accuracy than PNN, specifically in an Urban environment. When we look at the accuracy of the predictors in term of mobility environments, it is clear that higher efficiency is presented in the highway environment than in the urban environment. This is due to the vehicles’ mobility characteristic in a highway environment, in which vehicles are more restricted with certain direction for a longer period, and vehicles exhibit fewer changes in their speed. As for urban mobility, it is more prone to frequent vehicles’ movement changes. VI. C ONCLUSION Fig. 6: Comparison of different predictors training time over the number of dataset. that the location and direction features report the highest prediction accuracy in comparison to the rest. This is valid as the vehicles’ speed is not an effective feature to predict vehicles’ movement, where different vehicles may exhibit different speeds and yet connect to the same access router. At this point, we have optimized the data feature set and the neural networks parameter to fit the vehicular networks movement characteristics better. In the next set of experiments, we investigate the performance of multiple classifiers in term of computational time and accuracy. In Figure 6, we dispute Wireless connectivity is essential to provide satisfactory services in autonomous driving. Various wireless networks solutions aim to provide reliable communication solutions for autonomous driving applications. Nevertheless, the performance of such wireless networks is affected by the vehicles high mobility and rapidly changing topology. In this paper, we proposed an Machine Learning technique to predict the next RSU using the vehicles’ movement features. Taking into account the high accuracy of neural network models, we adopt the PNN classifier model for prediction. The performance of several classifying techniques is evaluated using the highway and urban mobility datasets. Our results showed that the PNNs demonstrate higher accuracy in comparison to other classifiers in predicting vehicles’ next AR connection. However, further enhancement can be added in the future, to include temporal a: Urban b: Highway Fig. 8: Comparison of different predictors accuracies. information to the dataset features in an online machine learning prediction model. Therefore, evaluating the wireless network performance up close in real time systems using realistic dataset. Finally, a hybrid model may be considered to combine the advantages of several machine learning models. ACKNOWLEDGMENT This work was partially supported by NSERC, Canada Research Chairs Program and NSERC-CREATE TRANSIT. R EFERENCES [1] Hirschauer, T.J., Adeli, H. and Buford, J.A., 2015. Computer-aided diagnosis of Parkinson’s disease using enhanced probabilistic neural network. Journal of medical systems, 39(11), p.179. [2] Mika, S., Rätsch, G., Weston, J., Schölkopf, B., Müller, KR., Fisher discriminant analysis with kernels.Neural Networks for Signal Processing. IX: 41–48, 1999. [3] Pearl, J., 2014. Probabilistic reasoning in intelligent systems: networks of plausible inference.Elsevier. [4] Raposo, L.M., Arruda, M.B., de Brindeiro, R.M. and Nobre, F.F., 2016. Lopinavir Resistance Classification with Imbalanced Data Using Probabilistic Neural Networks. Journal of medical systems, 40(3), p.69. [5] Singh, K.P., Gupta, S. and Rai, P., 2013. Predicting carcinogenicity of diverse chemicals using probabilistic neural network modeling approaches. Toxicology and applied pharmacology, 272(2), pp.465-475. [6] Specht, D.F., 1990. Probabilistic neural networks. Neural networks, 3(1), pp.109-118. [7] Endsley, M.R., 2017. Autonomous driving systems: a preliminary naturalistic study of the Tesla Model S. Journal of Cognitive Engineering and Decision Making, 11(3), pp.225-238. [8] Zhang, S., Chen, J., Lyu, F., Cheng, N., Shi, W. and Shen, X., 2018. Vehicular Communication Networks in the Automated Driving Era. IEEE Communications Magazine, 56(9), pp.26-32. [9] Wymeersch, H., Seco-Granados, G., Destino, G., Dardari, D. and Tufvesson, F., 2017. 5G mmWave positioning for vehicular networks. IEEE Wireless Communications, 24(6), pp.80-86. [10] Magnano, A., Fei, X., Boukerche, A. and Loureiro, A.A., 2016. A novel predictive handover protocol for mobile IP in vehicular networks. IEEE Transactions on Vehicular Technology, 65(10), pp.8476-8495. [11] Pathirana, P.N., Savkin, A.V. and Jha, S., 2004. Location estimation and trajectory prediction for cellular networks with mobile base stations. IEEE Transactions on Vehicular Technology, 53(6), pp.1903-1913. [12] Wickramasuriya, D.S., Perumalla, C.A., Davaslioglu, K. and Gitlin, R.D., 2017, April. Base station prediction and proactive mobility management in virtual cells using recurrent neural networks. In Wireless and Microwave Technology Conference (WAMICON), 2017 IEEE 18th (pp. 1-6). IEEE. [13] P. Fazio, M. Tropea, and S. Marano. 2013. A distributed hand-over management and pattern prediction algorithm for wireless networks With mobile hosts. In 9th Intl. Wireless Communications and Mobile Computing Conf. (IWCMC). 294–298. [14] Boukerche, A., Turgut, B., Aydin, N., Ahmad, M.Z., Bölöni, L. and Turgut, D., 2011. Routing protocols in ad hoc networks: A survey. Computer networks, 55(13), pp.3032-3080. [15] Anagnostopoulos, T., Anagnostopoulos, C. and Hadjiefthymiades, S., 2011, June. Mobility prediction based on machine learning. In Mobile Data Management (MDM), 2011 12th IEEE International Conference on (Vol. 2, pp. 27-30). IEEE. [16] Feltrin, M. and Tomasin, S., 2018, July. A Machine-Learning-Based Handover Prediction for Anticipatory Techniques in Wi-Fi Networks. In 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN) (pp. 341-345). IEEE. [17] Magnano, A., Fei, X. and Boukerche, A., 2015, October. Predictive mobile IP handover for vehicular networks. In Local Computer Networks (LCN), 2015 IEEE 40th Conference on (pp. 338-346). IEEE. [18] D. Xie T. Tan W. Hu, X. Xiao, and S. Maybank. 2004. Traffic accident prediction using 3-D model-based vehicle tracking. IEEE Transactions on Vehicular Technology 53, 3 (May 2004), 677–694. [19] E. Uhlemann, Time for autonomous vehicles to connect [connected vehicles], IEEE Vehicular Technology Magazine, vol. 13, no. 3, pp. 10–13, Sept. 2018. [20] R. Pazzi, Z. Zhang, and A. Boukerche, Design of a Fast Handoff Scheme for Vehicular Mesh Networks with Directional Antennas International Symposium on Design and Analysis of Intelligent Vehicular Networks and Applications, November 2011, pp. 97-100. [21] A. S. Sadiq, K. A. Bakar, K. Z. Ghafoor, J. Lloret, and S. A. Mirjalili, A smart handover prediction system based on curve fitting model for fast mobile IPv6 in wireless networks, Int. J. Commun. Syst., 2012 vol. 27, no. 7, pp. 969990, Jul. 2014. [22] Cooper, C., Franklin, D., Ros, M., Safaei, F. and Abolhasan, M., 2017. A comparative survey of VANET clustering techniques. IEEE Communications Surveys & Tutorials, 19(1), pp.657-681. Vancouver [23] J.T. Connor, R.D. Martin, and L.E. Atlas, Recurrent neural networks and robust time series prediction, IEEE Transactions on Neural Networks 5 (2), 240-254 (March 1994). [24] Bui, N., Cesana, M., Hosseini, S.A., Liao, Q., Malanchini, I. and Widmer, J., 2017. A survey of anticipatory mobile networking: Context-based classification, prediction methodologies, and optimization techniques. IEEE Communications Surveys & Tutorials, 19(3), pp.1790-1821. [25] Cover, T., and Hart, P., 1967. Nearest neighbor pattern classification. IEEE transactions on information theory, 13(1), pp.21-27.