SeismicPerformanceAssessmentinDenseUrbanEnvironments CentrifugeDataReportforTest-5
advertisement

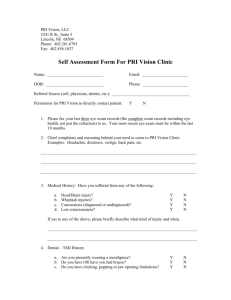
REPORT NO. UCD/CGMDR-XX/XX CENTER FOR GEOTECHNICAL MODELING SEISMIC PERFORMANCE ASSESSMENT IN DENSE URBAN ENVIRONMENTS: CENTRIFUGE DATA REPORT FOR TEST-5 BY J. D. ZUPAN N. W. TROMBETTA H. PUANGNAK D. PAEZ J. D. BRAY B. L. KUTTER T. C. HUTCHINSON G. L. FIEGEL C. BOLISETTI A. S. WHITTAKER DEPARTMENT OF CIVIL & ENVIRONMENTAL ENGINEERING COLLEGE OF ENGINEERING UNIVERSITY OF CALIFORNIA AT DAVIS April 2013 Centrifuge Data Report Test-5 JD Zupan, NW Trombetta, H Puangnak, D Paez, JD Bray, BL Kutter, TC Hutchinson, GL Fiegel, C Bolisetti, AS Whittaker 30 April 2013 This material is based upon work supported by the National Science Foundation (NSF) under Grant No. CMMI-0830331 through the George E. Brown, Jr. Network for Earthquake Engineering Simulation (NEES). The “Seismic Performance Assessment in Dense Urban Environments: Soil-Structure Interaction on the Scale of a City Block” project is a collaborative effort that includes the University of California, Berkeley (lead institution), University of Buffalo-SUNY, University of California, Davis, University of California, San Diego, California Polytechnic State University, San Luis Obispo, and the Consortium of Universities for Research in Earthquake Engineering. This project utilizes the NEES equipment site at the University of California, Davis. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the NSF. 1 NEESR-SG Project: “Seismic Performance Assessment in Dense Urban Environments” Centrifuge Data Report for Test-5 Josh Zupan, Nicholas Trombetta, Hamilton Puangnak, Daniel Paez, Jonathan Bray, Bruce Kutter, Tara Hutchinson, Gregg Fiegel, Chandrakanth Bolisetti, Andrew Whittaker Date: April 30, 2013 Total Experiment Duration: January 3 – March 25, 2012 Dates of Testing: March 15 and March 19, 2012 Project: Seismic Performance Assessment in Dense Urban Environments NSF Contract Number: CMMI-0830331 Sponsor(s): NSF Acknowledgments This material is based upon work supported by the National Science Foundation (NSF) under Grant No. CMMI-0830331 through the George E. Brown, Jr. Network for Earthquake Engineering Simulation (NEES). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the NSF. The authors would like to acknowledge the suggestions and assistance of Dan Wilson, Chad Justice, Ray Gerhard, Anatoliy Ganchenko, Lars Pederson and the rest of the staff at the Center for Geotechnical Modeling at UC Davis. The authors would also like to acknowledge and thank UC Davis Ph.D. student Jacquelyn Allmond and University of Colorado Boulder Assistant Professor Shideh Dashti for their valuable advice throughout this experiment. This experiment was performed using the large geotechnical centrifuge at UC Davis. The NSF, NASA, and the University of California supported the development of this centrifuge. Additional support was obtained from Tyndall Air Force Base, the Naval Civil Engineering Laboratory and Los Alamos National Laboratories. The large shaker was funded by the California Department of Transportation, the Obayashi Corporation, NSF and the University of California. Recent upgrades have been funded by NSF award #CMS-086566 through the George E. Brown, Jr. Network for Earthquake Engineering Simulation (NEES). Conditions and Limitations Permission is granted for the use of these data for publication in the open literature, provided that the authors and sponsors are properly acknowledged. It is essential that the authors be consulted prior to 2 publication to discuss the errors or limitations in the data not known at the time of the release of this report. In particular, there may be later releases of this report. Questions about this report may be directed by e-mail to: cgm@ucdavis.edu. 3 Table of Contents Previous Tests in this Series ................................................................................................... 5 Purpose and Configuration of Test-5 ..................................................................................... 8 Scale Factors ........................................................................................................................ 13 Soil and Pore Fluid Properties ............................................................................................. 13 Model Structures .................................................................................................................. 15 Model Construction ............................................................................................................. 20 As-Built Model ..................................................................................................................... 31 Instrumentation and Measurements .................................................................................... 32 Centrifuge Test Chronology................................................................................................. 33 Data Processing .................................................................................................................... 35 Cone Penetration Testing ..................................................................................................... 35 Known Limitations............................................................................................................... 36 Organization of Appendices ................................................................................................. 38 References ............................................................................................................................ 39 4 PREVIOUS TESTS IN THIS SERIES This data report describes the fifth centrifuge test in a sequence of six tests designed with the overarching goal of developing an understanding of structure-soil-structure interaction (SSSI) in dense urban environments. The experiment described herein was preceded HBM02 (Test-1), HBM03 (Test-2), HBM04 (Test-3), and NWT01 (Test-4). Data reports for previous experiments (Mason et al., 2010a, 2010b, 2010c and Trombetta et al., 2011) are available online through NEESHub (www.nees.org). All experiments were performed at the NEES@UC Davis equipment site facility (also known as the Center for Geotechnical Modeling or CGM). Test-1 focused on evaluating the effects of soil-structure-interaction (SSI) on isolated inelastic frame structures subjected to simulated earthquake induced ground motions. The experiment consisted of a single-story model scale inelastic frame (three-story prototype) with shallow spread footings and a three-story model scale inelastic frame (nine-story prototype) with a deep basement, positioned far enough from each other to avoid SSSI during large earthquakes. Test-2 consisted of the same two structures positioned directly adjacent to each other to study the changes in the flexible base responses of each structure as a result of structural adjacency. In addition to the data reports available through NEEShub, the results of Test-1 and Test-2 are summarized by Mason et al. (2013) and Trombetta et al. (2013). Test-3 consisted of an isolated inelastic frame structure on shallowly embedded spread footings and a configuration consisting of the same type of frame structure adjacent to an elastic shear wall structure. As in Test-1 and Test-2, the inelastic frame structures were one-story at model scale but intended to represent three-story prototypes. The adjacent structures were aligned in the direction of applied shaking. The relative locations of the structures during Test-3 are illustrated in Figure 1. Both types of structures used during this experiment were designed to have a first, flexible base mode approximately equivalent to the estimated site period in order to achieve maximum energy transfer from both the soil to the structure and from the structure back into the soil after strong shaking. More detail regarding the design considerations for the structures used in Test-3 is provided in Mason et al., 2010c. Comparison of the response of the isolated frame structure to the non-isolated frame during Test-3 provided a basis for identifying in-plane SSSI (iSSSI or, alternatively, end-to-end rocking) effects and the resulting changes in structural response. Test-4 was a natural progression from Test-3 and consisted of the same types of inelastic frame and elastic shear wall structures utilized in Test-3. Like Test-3, two sub-configurations were studied in Test-4: (1) an inelastic frame structure placed adjacent to an elastic shear wall structure with the alignment perpendicular to the direction of applied shaking, and (2) an inelastic frame structure with an adjacent elastic shear wall structure aligned in the direction of applied shaking and an elastic shear wall structure aligned in the direction perpendicular to the direction of applied shaking. The Test-4 configuration is illustrated in Figure 2. A comparison of the data obtained from the northern subconfigurations during Test-3 and Test-4 enabled the identification of anti-plane SSSI (aSSSI or, alternatively, side-to-side rocking) effects. The response of the inelastic frame structure in the southern sub-configuration of Test-4 was hypothesized to contain both iSSSI and aSSSI effects. Trombetta et al. (2011) provide more detail regarding Test-4. 5 FIGURE 1. (TOP) PLAN VIEW OF THE HBM04 (TEST-3) CONFIGURATION. (BOTTOM) ELEVATION VIEW OF HBM04 (TEST-3) CONFIGURATION. 6 FIGURE 2. (TOP IMAGE) PLAN VIEW OF THE TEST-4 CONFIGURATION. (BOTTOM IMAGE) ELEVATION VIEW, FROM WEST-TO-EAST, OF THE TEST-4 CONFIGURATION. Test-1 through Test-4 were performed with a uniform soil profile consisting of dry Nevada sand pluviated to a relative density of approximately 80%. As described by Mason (2011), the prototype site for this research project was located in downtown Los Angeles, CA (N34.082, W118.224) and the uniform soil profile of dry, dense, Nevada sand was a reasonable model of the deep, dense, sandy soil basins characteristic of the Los Angeles, CA region. An added benefit of this soil profile was that a large number of simulated intense earthquake ground motions could be applied, in sequence, without the added complexity of ground failure. Consequently, a large amount of data could be collected during each experiment using a comprehensive suite of earthquake ground motions. 7 PURPOSE AND CONFIGURATION OF TEST-5 The 1964 Niigata Earthquake (Niigata, Japan), 1990 Luzon Earthquake (Dagupan City, Philippines), 1999 Kocaeli Earthquake (Adapazari, Turkey), and the 2010-2011 Canterbury earthquake sequence on the south island of New Zealand have provided many examples of damage to buildings and lifelines due to seismically induced soil liquefaction. Field observations following these important events have motivated earthquake engineering researchers to perform detailed studies of the seismic performance of isolated, rigid, shallow foundations sited atop soils with high liquefaction potential using physical modeling, and several physical models have been tested using the large geotechnical centrifuge at the CGM (e.g., Hausler, 2002; Dashti, 2009). Although previous centrifuge experiments have proven to be successful in identifying the underlying mechanisms of liquefaction induced building displacements, they have thus far been limited to the study of isolated buildings. In accordance with the goals of Seismic Performance Assessment in Dense Urban Environments (referred to also as the NEES City Block (NCB) project), a comparative approach was employed during Test-5 to explore the effects of building adjacency on the response of structures subjected to realistic earthquake ground motions sited atop soils with high liquefaction potential. Consequently, the soil profile constructed for Test-5 contained a loose to medium dense layer of Nevada sand and the soil profile was saturated with viscous pore fluid. Model structures previously used by Dashti (2009) and Allmond and Kutter (2012) were used in so that the results from this experiment could be compared with results of recent, similar, experiments studying isolated structures. The Test-5 configuration is illustrated in Figure 3 (model scale units) and consisted of four quadrants. The northwest quadrant contained an isolated single degree of freedom (SDOF) model structure intended to represent a 2-story prototype building on a rigid mat foundation. This model building type will be referred to from this point forward as an 'A' building as it was originally implemented as building type 'A' in previous work by Dashti (2009). The purpose of the northwest quadrant was to establish the response of an 'A' building in relative isolation. This was the control case upon which the responses of the other 'A' buildings were to be compared. The northeast quadrant consisted of two 'A' buildings located adjacent to one another and separated by approximately 3 mm (model scale units). The objective with the northeast quadrant was to study the response of adjacent, identical, buildings. The southwest quadrant consisted of an 'A' building and a larger SDOF model structure with a shallow, rigid, foundation, referred to from this point forward as a 'J' building. The 'J' building was originally implemented in work performed by Allmond and Kutter (2012) and is intended to represent a prototype column supporting a superstructure. Allmond and Kutter (2012) employed six identical 'J' buildings to represent a prototype bridge. The objective of the southwest quadrant was to study the response of an 'A' building located approximately 3 mm from a much larger, yet still relatively simple building, on a shallow foundation. The southeast quadrant consisted of an 'A' building located approximately 3 mm from a 'J' building founded on piles. A total of 61 ICP accelerometers, 18 MEMS, 26 PPTs, and 32 LPs were incorporated into the Test-5 plan. The locations of these instruments are illustrated in Figures 4-6 and the "Instrumentation and Measurements" section of this report provides more detail regarding the characteristics of the instruments used for this test. Figures 3-6 can be downloaded from NEEShub (www.nees.org) and the coordinates of 8 all soils instruments relative to the origin at the northwest corner of the top of the top ring of the model container are provided in sensor files that have been uploaded to NEEShub. The centrifugal acceleration used for this test was approximately fifty-five times the acceleration of gravity (55g) at the designated effective radius - consistent with previous tests in the NCB testing series, and also consistent with the centrifugal accelerations used by Dashti (2009) and Allmond and Kutter (2012). For the purposes of Test-5 the effective radius was designated to correspond with the center of the loose to medium dense Nevada sand layer at the center of the model container. Simulated earthquake ground motions were applied at the base of the model container in the north-south direction. In total, Test-5 consisted of 11 shaking events. These events included 6 step waves and 5 ground motions. The step waves were used to level the bucket of the centrifuge, warm-up the shaking table, and allow the research team to check instrumentation. 9 FIGURE 3. (TOP) PLAN VIEW OF THE TEST-5 CONFIGURATION. (CENTER) PROFILE VIEW ALONG SECTION E-E'. (BOTTOM) PROFILE VIEW ALONG SECTION W-W'. 10 FIGURE 4. (TOP) PLAN VIEW OF ACCELEROMETERS. (CENTER) PROFILE VIEW OF ACCELEROMETERS ALONG SECTION E-E'. (BOTTOM) PROFILE VIEW OF ACCELEROMETERS ALONG SECTION W-W'. 11 FIGURE 5. (TOP) PLAN VIEW OF PPTS. (CENTER) PROFILE VIEW OF PPTS ALONG SECTION E-E'. (BOTTOM) PROFILE VIEW OF PPTS ALONG SECTION W-W'. 12 FIGURE 6. PLAN VIEW OF LPS. SCALE FACTORS Employing a scale factor converts data between the prototype and model scale. Important scaling factors are given in Table 1, where N represents the centrifugal acceleration in g. For Test-5, N = 55 corresponding to a target rotational velocity of 75.9 RPM. For additional information regarding scale factors, as well as more wide-ranging seismic centrifuge testing topics, see Kutter (1995). TABLE 1. IMPORTANT SCALE FACTORS FOR CENTRIFUGE TESTING; N= CENTRIFUGAL ACCELERATION Quantity Density Dynamic Time Force Frequency Length Mass Period Strain Stress Model Dimension/ Prototype Dimension 1 1/N 1/N2 N 1/N 1/N3 1/N 1 1 SOIL AND PORE FLUID PROPERTIES As illustrated in Figure 3, the subsurface profile for Test-5 consisted of 34 mm (approximately 1.9 m prototype) of dense Monterey 0/30 sand at the surface, underlain by 81 mm (approximately 4.5 m prototype) of loose to medium dense Nevada sand, underlain by 353 mm (approximately 19.4 m 13 prototype) of dense Nevada sand. The model was saturated using a solution of hydroxypropyl methylcellulose (HPMC) and water with a target kinematic viscosity of approximately twenty times the kinematic viscosity of water. The initial concentration of HPMC was based on recommendations provided by Stewart et al., 1998. The concentration was then adjusted, as necessary, following regular fluid viscosity tests using an Ubbelohde type viscometer. The target pore fluid table (referred to from this point forward as the groundwater table (GWT)), indicated on Figure 3, was at the base of the foundations of the model 'A' structures, at a depth of 15 mm (approximately 0.83 m prototype) below the soil surface. Nevada sand is a mined, non-processed, material. Consequently, the engineering properties of Nevada sand are not constant and will change with each batch delivered to the CGM. The batch of Nevada sand used during Test-5 was tested by Cooper Testing Labs in August of 2010 to evaluate representative characteristics of the material. The laboratory tests consisted of a particle size distribution, determination of the minimum and maximum index unit weight (ASTM D4254 and ASTM D4253), and the determination of the specific gravity of the material (ASTM D854). Key results from the laboratory tests are summarized in Table 2. As described by Wu (2002), Monterey 0/30 sand is a type of commercially available washed and sieved beach sand. It can be classified as uniform, medium-grained, sub-rounded, clean sand composed primarily of white to tan quartz grains with a smaller amount of darker feldspar and mica grains (Wu, 2002; Kammerer, 2002). The average grain size, D50, is typically on the order of 0.35mm to 0.45mm and the coefficient of uniformity, Cu, has been reported by previous researchers (e.g., Kammerer, 2002) to be between 1.2 and 1.3. Dashti (2009) provided a summary of the specific gravities, minimum and maximum void ratios, and minimum and maximum unit weights reported by previous researchers, and this summary has been reproduced here as Table 3. The target parameters for this experiment and reported in Table 3 were also employed by Dashti (2009). TABLE 2. IMPORTANT SOIL PROPERTIES FOR NEVADA SAND Quantity Classification Gradation Specific Gravity1 D30 Value Pyro Minerals, 2510 Wood Street Oakland, CA 94607 Uniform, fine sand; SP Poor 2.66 0.11 mm D60 0.16 mm Coefficient of Uniformity γd,max (kN/m3)1 γd,min (kN/m3)1 2.07 17.2 14.7 Supplier 1 Provided by Cooper Labs (2010) and available on CGM wiki TABLE 3. IMPORTANT SOIL PROPERTIES FOR MONTEREY 0/30 SAND (REPRODUCED FROM DASHTI, 2009) Source Method Gs emin 14 emax γd,min (kN/m3) γd,max (kN/m3) Wu (1999) Dry Tipping 2.64 0.541 0.855 13.96 16.81 NovaRoessing (1998) Modified Japanese - 0.53 0.83 14.15 16.93 Our Target - 2.64 0.536 0.843 14.06 16.86 MODEL STRUCTURES As mentioned previously, two types of model structures were used during Test-5: 'A' buildings and 'J' buildings. Details regarding the design of the 'A' buildings are available in Dashti (2009) and details regarding the design of the 'J' buildings are available in Allmond and Kutter (2012). Construction drawings for these model structures are included in Appendix C of this report. Please note from the construction drawings in Appendix C that there were a couple of minor modifications made to the Test-5 'J' buildings relative to the buildings utilized by Allmond and Kutter (2012): 1) The columns were welded to a column baseplate that could be bolted to the foundation. This modification allowed for the foundations to be installed during the model construction phase in the model preparation shop. The columns and deck masses could then be connected to the foundations following model saturation. This was necessary because the columns and deck masses of the 'J' structures would not fit underneath the lid used to seal the model during saturation. 2) The foundation of the 'J' building in the southeast quadrant was connected to four 1 inch diameter (model scale) aluminum piles. The piles were solid aluminum but they were counter-bored at the top with an inner diameter of 0.8 inches to a depth of 0.5 inches. The centers of the piles were then threaded to accept 1/4" - 20 thread rod for an additional 1.75 inches. Once sand was pluviated to the top of the piles during model construction the connection between the piles and foundation then consisted of the following steps: 1) 1/4" thread rod was installed in each pile and tightened with a lock washer and hex nut; 2) A second hex nut was then spun down the thread rod and glued into place leaving approximately 1/4" length of thread rod exposed between nuts; 3) Heat shrink tubing was then placed over the thread rod assembly to the top of the top hex nut and shrunk into place; 5) Sand was pluviated around and between the piles to the top of the pile connection assembly; 6) Holes were then drilled through the 'J' building foundation at the appropriate locations and the foundation was placed over the thread rod and on to washers placed on top of the hex nuts; and 7) The assembly was then tightened from the top. The resulting connection was intended to minimize moment transfer between the piles and the superstructure. The remainder of this section contains a summary of the relevant measurements pertaining to the five 'A' model structures and the two 'J' model structures that were used during Test-5. Table 4 and Table 6 provide a summary of each component used to assemble the 'A' model structures and 'J' model structures, 15 respectively. Table 7 summarizes relevant measurements for the piles. Table 5 and Table 8 summarize the component ID's used to assemble each of the 'A' and 'J' model structures, respectively. Please note that one 'A' model structure assembly consists of one footing, two foundation clamps, two columns, one mass, and two mass clamps and one 'J' model structure assembly consists of one footing, one column, one small mass, and one large mass. The as-built self-weight, and footing contact pressure are also indicated in Table 5 and Table 8. The photographs in Figure 7 and Figure 8 show the assembled 'A' and 'J' model structures. Figure 9 is a photograph of a single model pile. TABLE 4. MEASURED DIMENSIONS OF 'A' MODEL STRUCTURE COMPONENTS (MODEL SCALE) Model Structure Type A A A A A A A A A A A A A A A A A A A A A A A Component Type Component ID x (mm) y (mm) z (mm) Mass (g) Footing Footing Footing Footing Footing Foundation Clamp Foundation Clamp Foundation Clamp Foundation Clamp Foundation Clamp Foundation Clamp Foundation Clamp Foundation Clamp Foundation Clamp Foundation Clamp Foundation Adapter Foundation Adapter Foundation Adapter Foundation Adapter Foundation Adapter Column Column Column A B C D E 165 165 165 165 165 110 110 110 111 111 15 15 15 14 15 647.5 661.5 645.7 656.4 650.6 A 101.5 12.5 9 24.9 B 101.5 12.5 9 24.8 C 101.5 12.5 9 24.8 D 101.5 12.5 9 24.8 E 101.5 12.5 9 25.7 F 101.5 12.5 9 25.3 G 101.5 12.5 9 24.8 H 101.5 12.5 9 24.8 I 101.5 12.5 9 25.7 J 101.5 12.5 9 25.3 A 101 48 13 138.6 B 101 48 13 142.9 C 101 48 13 141.2 D 101 48 13 141.2 E 101 48 13 141.2 A B C 101.5 101.5 101.5 67.5 67.5 67.5 1 1 1 60.7 60.7 60.5 16 A A A A A A A A A A A A A A A A A A A A A A Column Column Column Column Column Column Column Mass Mass Mass Mass Mass Mass Clamp Mass Clamp Mass Clamp Mass Clamp Mass Clamp Mass Clamp Mass Clamp Mass Clamp Mass Clamp Mass Clamp D E F G H I J A B C D E A B C D E F G H I J 101.5 101.5 101.5 101.5 101.5 101.5 101.5 114.5 114.5 114.5 114.5 114.5 119 119 119 119 119 119 119 119 119 119 67.5 67.5 67.5 67.5 67.5 67.5 67.5 48.5 48.5 48.5 48.5 48.5 19 19 19 19 19 19 19 19 19 19 1 1 1 1 1 1 1 19 19 19 19 19 6.5 6.5 6.5 6.5 6.0 6.0 6.5 6.5 6.5 6.5 60.6 63.2 63.4 63.6 63.1 60.7 59.4 789.9 789.1 789.6 779.8 786.5 100.0 99.9 99.9 100.0 99.9 97.1 97.0 99.9 100.2 100.0 TABLE 5. AS-BUILT 'A' MODEL STRUCTURES Model Structure Type Model Structure ID Assembly (Footing ID, Foundation Clamp IDs, Foundation Adapter ID, Column IDs, Mass Clamp IDs, Mass ID) A A A A A NW NE-N NE-S SW SE D,G,H,D,E,F,E,H,C B,A,B,C,A,B,A,B,A C,C,D,B,C,D,C,D,B A,E,I,E,G,H,I,J,E E,F,J,A,I,J,F,G,D Prototype Self-Weight (kN) Foundation Contact Pressure (kPa) 3364 3365 3377 3386 3312 62 62 63 63 61 TABLE 6. MEASURED DIMENSIONS OF 'J' MODEL STRUCTURE COMPONENTS (MODEL SCALE) Model Structure Type J J J J J Component Type Component ID x (mm) y (mm) z (mm) Mass (g) Footing Footing Column Top Column Base Column Center A B A A 348 348 114.5 76 348 348 114.5 76 25.5 25.5 1162 1169 546 1174 A 19 38.1 17 J J Column Top Column Base Column Center Superstructure Small Mass Superstructure Small Mass J J J Superstructure Large Mass Superstructure Large Mass J J B B 114.5 76 114.5 76 B 19 38.1 A 114 B 546 1175 114 16 1595 114 114 16 1593 A 114 114 22 2234 B 114 114 22 2233 TABLE 7. MEASURED DIMENSIONS OF MODEL PILES (MODEL SCALE) Model Structure Type Component Type Component ID Diameter (mm) Length (mm) Mass (g) J J J J Pile Pile Pile Pile A B C D 37 35.5 36 35.5 273 273 273 273 376 377 376 376 TABLE 8. AS-BUILT 'J' MODEL STRUCTURES Model Structure Type Model Structure ID Assembly (Footing, Column, Small Mass, Large Mass) J J SW SE B,B,B,B A,A,A,A 18 Piles Prototype SelfWeight (kN) Foundation Contact Pressure (kPa) No Yes 10478 10472 186 186 FIGURE 7. ASSEMBLED 'A' MODEL STRUCTURES. MODEL STRUCTURE ON LEFT IS FULLY ASSEMBLED. MODEL STRUCTURE ON RIGHT SHOWS EXPOSED COLUMNS PRIOR TO CONNECTING MASS WITH MASS CLAMPS. FIGURE 8. ASSEMBLED 'J' MODEL STRUCTURE. 19 FIGURE 9. MODEL PILE As illustrated in the photographs presented in Figure 7 and Figure 8, the footings of all model structures were covered in Monterey 0/30 sand along the base and the sides. To do this, the smooth aluminum footings were roughened with a wire brush and then coated with epoxy adhesive. Monterey 0/30 sand was then spread over the epoxy and allowed to set. In a similar manner the model piles were covered in Nevada sand. MODEL CONSTRUCTION The following steps provide a general outline of model construction: 1. Prior to model construction, Nevada sand was obtained from the stockpile at the CGM and dried in a large oven to make sure that there was no moisture in the soil during pluviation. Monterey 0/30 sand was also dried in the large oven prior to placement in the model container. In addition to drying the soil, an attempt was made to mix the Nevada sand as much as practical as it was obtained from the stockpile in order to maximize uniformity during placement. 20 FIGURE 10. LARGE OVEN USED FOR DRYING SOIL AND 2. ROLLING CONTAINER USED FOR TRANSPORT AND MIXING SOIL. The instrumentation used for Test-5 was prepared for installation: ICP accelerometers were checked to make sure they were working and then waterproofed using a coat of primer followed by one to three coats of synthetic rubber (Plasti Dip). Calibration values for the linear potentiometers (LPs) and pore pressure transducers (PPTs) were determined by following calibration procedures under the guidance of CGM staff. PPTs were dried prior to installation in the model. 21 FIGURE 11. (TOP LEFT) ICP ACCELEROMETERS WERE COATED IN SYNTHETIC RUBBER. (TOP RIGHT) SET UP FOR DETERMINING CALIBRATION VALUES OF LPS. (BOTTOM) SET UP FOR DETERMINING CALIBRATION VALUES OF PPTS. 3. The model structures were prepared for installation. This included cleaning all parts, applying Monterey sand around the base and the sides of the 'A' building and 'J' building footings, assembling the model structures, and installing the LP mounts. Model piles were coated in Nevada sand. The masses of the model structure were also wrapped in checkered contact paper to reduce light reflection and improve high speed and analog camera photo quality. FIGURE 12. (A) BASE AND SIDES OF FOUNDATION ELEMENTS WERE ROUGHENED UP. (B) A THIN LAYER OF MONTEREY SAND WAS COATED ON THE BASE AND SIDES OF THE FOUNDATION ELEMENTS USING EPOXY ADHESIVE . 22 4. The model container (FSB 2.1) was obtained and cleaned. As illustrated in Figure 3, this container has approximate internal model scale dimensions of 1650 mm (length) by 790 mm (width) by 580 mm (height). The coordinates used to identify the locations of instrumentation and the model structures are relative to an origin at the northwest corner of the inside of the model container with the x-axis measured in the north-south direction (increasing to the south), the y-axis measured in the east-west direction (increasing to the east) and the z-axis measured vertically (increasing from the top of the container to the bottom of the container). This coordinate system is shown on Figure 3 and is consistent with the coordinate system used in previous NCB experiments. 5. Subsurface saturation system components were installed. This consisted of the following: Twelve rectangular porous stones were installed at the base of the model container (six were installed at the north end and six at the south end). Each of the porous stones was connected to two plastic tubes. The larger of the two plastic tubes was sized such that it would connect to the saturation troughs during saturation and thus provided a conduit for pore fluid so that the model could be saturated from the bottom up. The smaller of the two plastic tubes was routed along the sides of the model container to above the future soil surface and was intended to provide a means for air bubbles to escape during saturation. Figure 13 is a photograph showing a plan view of the subsurface saturation system components. Small tubes provide conduit for air bubbles to escape during saturation Porous Stones Large tubes connected to saturation troughs during model saturation Saturation Trough FIGURE 13. PLAN VIEW PHOTOGRAPH OF THE SUBSURFACE COMPONENTS OF THE MODEL SATURATION SYSTEM. SATURATION TROUGHS ARE ALSO SHOWN FOR REFERENCE. 23 6. Instrumentation was installed on the base of the container. ICP accelerometers were seated in modeling clay and PPTs were seated on a thin layer of Nevada sand. Instrumentation cables were routed up the interior side walls of the model container and secured using duct tape. PPTs ICP Accelerometers FIGURE 14. PLAN VIEW PHOTOGRAPH OF THE BASE INSTRUMENTATION 7. The container weight was measured. 8. Nevada and Monterey 0/30 sand were pluviated in lifts of varying thickness. Lift thicknesses were controlled by the instrumentation location plan and the structural location plan. All sand was placed by dry pluviation into the model container. Three pluviators were used to place the respective layers of dense Nevada sand, loose to medium dense Nevada sand, and dense Monterey sand. Each of the three pluviators was calibrated to place material at the desired dry density using a calibration chamber of known volume. The calibration process consisted of adjusting the drop height and flow rate of the sand until the correct weight of sand was measured for the known volume of the calibration chamber. 24 FIGURE 15. (TOP LEFT) CALIBRATION OF LARGE PLUVIATOR. (TOP RIGHT) PLACING DENSE NEVADA SAND USING LARGE PLUVIATOR. (MIDDLE LEFT) CALIBRATING THE MEDIUM PLUVIATOR FOR LOOSE-MEDIUM DENSE NEVADA SAND (MIDDLE RIGHT) PLACING LOOSE-MEDIUM DENSE NEVADA SAND. (BOTTOM) PLACING DENSE MONTEREY SAND. 25 9. Each lift of dense Nevada sand was also vibrated using an electric vibratory plate, as shown in Figure 16. While the objective was to make the dense Nevada sand as dense as possible, care was also taken to apply an equal amount of vibration to each lift of dense Nevada sand to minimize variability in the density within and between each lift. FIGURE 16. VIBRATION OF DENSE NEVADA SAND 10. After each lift was pluviated, the surface of the soil was groomed to the desired elevation using a vacuum cleaner. Prior to each grooming session the vacuum cleaner filter was blown out with compressed air. Additionally, the hoses were kept clear of sand during the grooming process. These steps were necessary to ensure a constant suction height during grooming so that a correct final elevation could be achieved. After the lifts were finished to the correct elevation, the weight of the model was measured to get an estimate of the average relative density of the lift. Model weight measurements were performed until the model weight exceeded the capacity of the crane. FIGURE 17. VACUUMING TO PROPER ELEVATION 26 11. The desired location of each instrument was marked on the surface of each lift and the instruments were carefully placed. Instrumentation cables were routed along the side walls of the model container and secured with duct tape. 12. When the surface of the soil was finished at a depth corresponding to approximately 50mm above the toe depth of the piles, the piles were installed at the appropriate locations by driving the piles into the dense Nevada sand using a rubber mallet. The piles were then checked with a bullseye bubble level and a small carpenter's level to ensure they were plumb. FIGURE 18. INSTALLATION OF MODEL PILES 13. When the top of the dense Nevada sand layer was reached, a very thin layer of blue sand was spread over the surface to act as a marker during excavation following the test. An additional thin layer of blue sand was placed at the top of the loose-medium dense Nevada sand layer. 27 FIGURE 19. THIN LAYER OF COLORED SAND AT TOP OF DENSE NEVADA SAND LAYER 14. The soil surface was brought to an elevation just above the elevation of the base of the model structure foundations. At this point the foundation for the pile supported 'J' model structure was connected to the previously installed piles. Thread rod was threaded into the tops of the exposed piles. The tips of the thread rod were coated using a paint pen and the footing of the 'J' model structure was pressed lightly over the thread rods to mark the as-built pile locations. Four holes were then drilled through the 'J' model structure footing and the piles were connected to the footing using a hex nut and washers. 15. Given that the model structures were located off of the center line of the model container in the east-west direction, it was important to account for the radial gravitational field produced by the centrifuge when placing the model structures. Accordingly, the soil surface was sloped such that the model structures were placed with an initial tilt of approximately 1 degree towards the center of the container. The center of the model structures were placed at the design footing base depth. After placing the structures, the soil surface was curved up between the center of the container and the eastern and western container sides so that the gravitational field would be approximately normal to the surface along the transverse direction of the container. 16. The displacement rack was constructed on the model container in the model preparation shop with the structures in place. It was designed to be as stiff as possible to minimize both static deflections due to increased self-weight and dynamic deflections during strong shaking. Linear potentiometers (LPs) were mounted in holders and the holders were attached to the displacement 28 rack using standard hardware. The tips of the LPs were either positioned to directly measure the displacement of a location, or placed on stiff flags added to the structures at locations where direct measurement of displacement was difficult or not possible to access. The displacement rack and the 'J' structure columns and masses were removed from the model after the displacement rack was constructed. 17. The model was transported from the model preparation shop to the centrifuge and mounted on the centrifuge arm. 18. The model was saturated with the HPMC and water pore fluid solution described previously. Saturation consisted of covering and sealing the model with an air tight lid, applying a vacuum to remove air from the pores, slowly releasing the vacuum and filling the pore space with carbon dioxide, and then re-applying the vacuum. While the model was under vacuum, the de-aired pore fluid solution was dripped into the saturation troughs and, through the large tubes connected to the saturation troughs, into the soil. Valves were used to control the flow rate of de-aired pore fluid into the saturation troughs. FIGURE 20. SATURATION SET-UP 19. After approximately 95 hours of model saturation, the model had taken approximately 60% of the theoretical required amount of pore fluid. At this point the pore fluid was allowed to overflow the metal saturation troughs and drip through several sponges into narrow saturation trenches on the soil surface to speed up the rate of progress. The idea with this procedure was to allow for the pore fluid to fill the soil pore space from both the bottom of the container (i.e., through the tubes connected to the saturation troughs) and through the surface of the container along the northern 29 and southern edges of the container. Care was taken so as to not overflow the surface trenches. Pore fluid was introduced into the model up to the point where it was ponded across the surface of the entire model. The vacuum pressure was then released and the saturation lid was removed. FIGURE 21. SPONGES UNDERNEATH SATURATION TROUGH 20. The columns and masses of the 'J' structures were bolted to their foundations. 21. The displacement gauge rack was installed and all instrumentation wiring was routed to the north end of the model container along the sides of the container or through the two longitudinal channel pipes that made up part of the displacement rack. 22. Instrumentation cables were plugged into the appropriate channels and signals were checked on the DAQ. 23. High-speed cameras, analog cameras, and LED lights were placed and connected. 30 FIGURE 22. PLAN VIEW OF MODEL WITH DISPLACEMENT RACK FOLLOWING SATURATION 24. After the final inspection, the model was ready for spin-up. AS-BUILT MODEL As indicated on Figure 3, the positions of the model structures and the thickness of the soil layers were typically within 2 mm of the design model geometry. Consequently, for all intents and purposes, the dimensions indicated on Figure 3 can be considered as‐built dimensions. As also described above, the thicknesses of each pluviation lift were controlled by the instrumentation layout plan and the structural layout plan. Estimates of the achieved relative density of most lifts were obtained by weighing the model before and after each lift and taking nine measurements spaced evenly on the surface to estimate the achieved lift thickness. For thinner layers, measurement error had a greater effect on the reported relative densities. In addition to the container weight measurements during pluviation, a pre-shake CPT was performed to assess the initial soil conditions and the CPT-based relative density correlations developed by Salgado et al. (1997) and Jamiolkowski et al. (2001) were employed to provide an alternative means to estimate the relative density. The best estimates of the as-built relative density for each layer are indicated in Table 9. These estimates include consideration of pre-pluviation calibration, measurements taken during pluviation, and the CPT-based relative density correlations. Please note that the container weights could only be measured until the capacity of the crane in the model preparation shop was reached. 31 Twenty-seven viscosity tests of the pore fluid were performed just prior to and during model saturation using an Ubbelohde type viscometer. While there was some variability in the test results due to fluid temperature fluctuations, the average of the twenty-seven tests suggests the pore fluid had a kinematic viscosity of approximately 21-22 times that of water. Based upon the mean hydrostatic pore water pressure from the functional PPTs, the groundwater table was approximately 0.50 m (prototype) below the ground surface just prior to the PRI_mod simulated ground motion, and approximately 0.87 m (prototype) below the ground surface just prior to the TCU_mod and PRI_large ground motions. Instrumentation locations are indicated on Figures 4‐6 and the coordinates of the soils instrumentation, relative to the origin at the northwest corner of the top of the top ring of the model container, are provided on the sensor sheets that have been uploaded to NEEShub. TABLE 9. ESTIMATED SOIL PROFILE FROM MEASUREMENTS DURING PLUVIATION. Layer Number Elevation of Layer Base (mm) Elevation of Layer Top (mm) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 582 555 525 476 432 399 379 332 298 262 231 190 153 148 555 525 476 432 399 379 332 298 262 231 190 153 148 129* 15 129* 114* Soil Description Best Estimate of Average Relative Density (%) Dense Nevada Sand 85 +/- 5 Loose-Medium Dense Nevada Sand Dense Monterey 0/30 Sand 40 +/- 5 85 *INDICATES THE ELEVATION OF THE LAYER VARIED ALONG THE TRANSVERSE DIRECTION OF THE CONTAINER TO ACCOUNT FOR THE RADIAL GRAVITATIONAL FIELD CREATED BY THE CENTRIFUGE. INSTRUMENTATION AND MEASUREMENTS Four instrument types were used for this test: integrated circuit piezoelectric (ICP) accelerometers, micro-electro-mechanical system (MEMS) accelerometers, pore pressure transducers (PPTs), and linear potentiometers (LP). As mentioned previously, a total of 61 ICP accelerometers, 18 MEMS, 26 PPTs, and 32 LPs were incorporated into the test plan. The cone penetration test (CPT) was 32 performed using a system consisting of two load cells (LC) and one LP. The instrumentation tables in Appendices A and B summarize the instrumentation used for each specific spin. The ICP and MEMS accelerometers had ranges of ±100 g. Linear potentiometers were used with strokes of 1 in (25 mm), 2 in (50 mm), 3 in (75 mm), and 4 in (100 mm). The PPTs had ranges of 50 psi (345 kPa), 100 psi (689 kPa), or 200 psi (1379 kPa). Each instrument has either a factory calibrated (ICP and MEMs accelerometers) or CGM calibrated (LPs and PPTs) sensitivity factor, which is included in the instrumentation list in the Appendices. Four high-speed cameras were also used for this test. The high-speed cameras record a maximum duration of 20 sec at a rate of 210 frames/sec. For the purposes of this data report, the high speed cameras will be referred to as HS1 through HS4. HS1 was elevated above the top of the model container within the southern half of the model and viewed north to capture the adjacent 'A' buildings in the northeast quadrant, HS2 was located on the CPT rack guide rails above the southwest corner of the model and viewed northeast to capture the southwest quadrant, HS3 was located on the CPT rack guide rails above the model at the northwest corner and viewed east to capture the isolated 'A' building in the northwest quadrant, and HS4 was located on the CPT rack guide rails above the southeast corner of the model and viewed northwest to capture the 'A' building adjacent to the 'J' building on piles. High-speed captures recorded during the simulated ground motions have been converted to prototype speed (1/N of the captured rate) and uploaded to NEEShub (www.nees.org). Analog cameras, capable of capturing video at 20 frames/sec, were utilized to capture images of important locations before and after each ground motion. Table 10 contains information about the analog cameras and their locations. More information about the camera specifications is provided at the CGM website (http://nees.ucdavis.edu/). The raw analog camera files recorded during the simulated ground motions have also been uploaded to NEEShub. TABLE 10. ANALOG CAMERA PLACEMENTS AND THEIR PURPOSES. Camera Channel View Purpose 2 3 6 9 11 13 14 15 16 Profile of NE Quadrant from East Wall Profile of NW Quadrant from West Wall Profile of North Quadrants from North Wall Observation Well at SE Corner from Disp. Rack Plan view of Centrifuge Bucket from Arm SE Quadrant from East Wall SW Quadrant from West Wall Bucket Level on North Side Bucket Level on South Side Monitor building response Monitor building response Monitor building response Monitor groundwater level Monitor bucket Monitor building response Monitor building response Monitor bucket Monitor bucket CENTRIFUGE TEST CHRONOLOGY 33 The centrifuge was spun once on 03/15/2012 and twice on 03/19/2012. The desired g-level (N) during both spins was 55g at the center of the layer of loose to medium dense Nevada sand, corresponding to an effective radius of approximately 8.53 m. One cone penetration test (CPT) was performed on 03/15/2012, prior to application the shaking events. Two step waves and one simulated ground motion were performed on 03/15/2012 and four step waves and four simulated ground motions were performed on 03/19/2012. Step waves were used primarily to warm-up the centrifuge shaking table and check critical instrumentation. Table 11 contains the testing schedule used for Test-5. Table 12 contains a list of the data and instrumentation files for Test-5. The instrumentation and raw data files have been uploaded to NEEShub. TABLE 11. TEST-5 TESTING SEQUENCE Spin ID Date ID Input File Frequency (Hz) Amp. Factor N/A 4000 4000 2750 N/A 0.9 0.9 0.5 Step.txt Step.txt 4000 4000 0.9 0.9 Step.txt Step.txt Kobe0807.txt Kobe0807.txt Kobe0807.txt Kobe0807.txt 4000 4000 2750 2750 2750 2750 0.9 0.9 0.5 1.7 0.36 5.1 I CPT1 N/A SW1 Step.txt 3/15/2012 SW2 Step.txt PRI_small Kobe0807.txt II 3/19/2012 III SW5 SW6 PRI_small 3/19/2012 PRI_mod TCU_mod PRI_large SW3 SW4 TABLE 12. DATA AND INSTRUMENTATION FILES FOR TEST-5 Spin ID Motion NEEShub TrialRepetition NEEShub Raw Data File I-1 cpt1.txt I-2 I-3 I-4 sw1.txt sw2.txt pri_small.txt 03_19_2012 Instrumentation II-1 II-2 sw3.txt sw4.txt 03_19_2012 Instrumentation III-1 III-2 III-3 III-4 III-5 sw5.txt sw6.txt pri_small.txt pri_mod.txt tcu_mod.txt Instrumentation File CPT1 I II III SW1 SW2 PRI_small SW3 SW4 SW5 SW6 PRI_small PRI_mod TCU_mod 03_15_2012 Instrumentation 34 PRI_large III-6 pri_large.txt DATA PROCESSING During shaking events data was collected from all instruments at a sampling frequency of 4096 Hz (model scale) utilizing a user interface coded in LabView. The raw data was converted to engineering units by employing appropriate sensitivity factors, which are linear factors with units of engineering unit/Volt. For the ICP and MEMS accelerometers, these sensitivity factors are determined and specified by the manufacturer. For the PPTs and LPs, the researcher must determine these sensitivity factors by individually calibrating the sensors before each test. The sign conventions established for this project follow a global coordinate system, where south, east, and down (into the soil) are positive and north, west, and up are negative. Coordinates are defined relative to an origin at the northwest corner of the top ring of the container (Figure 3). Once voltages are converted to engineering units, the measurements must then be multiplied by a ‘direction vector’ (either +1 or -1) to account for the orientation of the instrument. For sensors where the measurements are expected to be small, a gain value greater than 1 is used to boost the recorded signal. The gain value must then be divided out of the raw voltage values before the ‘engineering unit’ data is finalized. The data presented in the appendices of this report has been converted to engineering units, and corrected for gains and instrument orientation, using Matlab. In addition, accelerometers and LPs were further processed to remove the initial voltage offsets. This was accomplished by subtracting the mean of the first 100 samples of each record. The Test-4 data report describes the logic behind this in detail. For reference, the instrumentation lists provided within Appendices A and B include the sensitivity factors for each sensor, as well as direction vectors and gain values. As has been mentioned in previous data reports, signal processing is an important part of interpreting all data. All the data shown in the appendices of this report is unfiltered. CONE PENETRATION TESTING One CPT was performed on the Test-5 model at the location indicated on Figure 3. This CPT was performed while the model was spinning at approximately 75.9 RPM and was intended to provide an alternative means to evaluate the initial approximate relative density of the soil prior to the application of step waves and simulated ground motions. The empirical correlations of Salgado et al. (1997) and Jamiolkowski et al. (2001) have been applied to the CPT data for this purpose. Results from these correlations are summarized in Figure 23. The data file for this test is summarized in Table 12. 35 0 2 2 4 4 6 6 Prototype Depth (m) Prototype Depth (m) 0 8 10 12 8 10 12 14 14 16 16 18 18 20 0 5 10 15 20 25 CPT Tip Resistance (MPa) 30 20 Jamiolkowski et al. (2001) Salgado et al. (1997) 0 0.2 0.4 0.6 Relative Density 0.8 1 FIGURE 23. CPT TIP RESISTANCE AND CORRELATED RELATIVE DENSITY VS DEPTH Due to a channel configuration error, the CPT tip displacement data was not recorded during the CPT push. Consequently, for the purposes of these preliminary analyses, a push rate of 2 cm/s has been assumed. This is generally consistent with the push rate observed during CPTs in previous NCB experiments. More information regarding the CPT system used at the CGM can be found in the Test-4 data report (i.e., Trombetta et al., 2011). KNOWN LIMITATIONS Several of the PPT connectors were exposed to pore fluid while the model was under vacuum during model saturation. This was recognized during model saturation and the research team, along with help from the CGM staff, attempted to minimize this exposure as much as possible. Despite these efforts, many of the PPTs were found to be not functioning properly when their signals were checked after model saturation. A large amount of effort was put into troubleshooting and attempting to repair the PPTs with bad signals, but, unfortunately, some were unable to be repaired and did not function properly during Test-5. After connecting the 'J' model building superstructures after saturation it was observed that the 'J' building in the southwest quadrant was tilted approximately 2.5 degrees to the east. In order to account for the radial gravitational field, the model structures were intended to be tilted just over 1 degree towards the center of the model container. To correct for this overtilt of the southwest 'J' building, a structural 36 shim was designed and installed between the column baseplate and the foundation. The shim was 3 inches by 3 inches and 0.1 inches thick on the east side and 0.175 inches thick on the west side. An oppositely tapered shim was installed on top of the column baseplate so that the hardware used to connect the assembly could be tightened properly. Details of the shim can be found in Appendix C of this report. Instruments that did not appear to functioning properly were tracked during each of the spins. A summary of instruments that appeared to be not functioning or had questionable or noisy signals during Spin III is provided in Table 13. Please note that this list is not intended to be exhaustive and is based only upon a visual inspection of the data in LabView during Spin III. All data, regardless of quality, is presented in the appendices of this report. Also, as mentioned previously, it was recognized that the CPT tip displacement data was not recorded during the CPT due to a channel configuration error. TABLE 13. NON-WORKING AND QUESTIONABLE SENSORS DURING TEST-5 SPIN III Channel PCB1-12 PCB1-13 PCB1-14 PCB2-4 PCB2-6 PCB2-8 PCB2-13 PCB3-6 PCB4-2 PCB4-10 PCB4-11 ProgB1-0 ProgB1-1 ProgB1-2 ProgB1-3 ProgB1-5 ProgB1-7 ProgB2-0 ProgB2-5 ProgB2-6 ProgB3-0 ProgA1-0 ProgA1-1 ProgA1-2 ProgA1-3 ProgA1-4 ProgA1-5 ProgA2-2 ProgA4-1 ProgA4-3 PT1-2 PT3-4 PT3-6 Iso1-1 Iso2-4 Instrument Name SA_FF1_154 SA_FF1_192 SAV_FF1_Sfc SA_NW_2_154 SA_SE_1_154 SA_FF2_154 A_NE_1_E_x A_SE_2_S_z A_NW_S_z SA_FF2_B SA_SE_2_154 PPT_NW_1_229 PPT_NE_S_192 PPT_NE_1_229 PPT_FF1_229 PPT_SW_2_154 PPT_NE_2_S_192 PPT_SW_2_229 PPT_SE_2_154 PPT_NE_C_192 PPT_FF1_Base PPT_FF2_Base PPT_NW_C_192 PPT_NW_2_192 PPT_SW_2_192 PPT_SW_1_192 PPT_NW_1_192 PPT_NE_2_C_192 A_SE_1_roof_y A_SW_1_roof_y D_NE_2_S_x D_NW_1_N_x D_soil_e_sfc D_NE_1_N_x D_SW_1_SWC_z Motions with Issues pri_large pri_large pri_small, pri_large pri_small, pri_mod, tcu_mod pri_large pri_small, pri_large pri_large pri_large pri_large pri_large pri_small, tcu_mod, pri_large pri_small, tcu_mod, pri_large pri_small, pri_mod, tcu_mod, pri_large pri_small, pri_mod, tcu_mod, pri_large tcu_mod, pri_large pri_small, pri_mod, tcu_mod, pri_large pri_mod, tcu_mod pri_small, pri_mod, tcu_mod, pri_large pri_small, pri_mod, tcu_mod tcu_mod pri_small, pri_mod, tcu_mod, pri_large pri_small, tcu_mod pri_small, pri_mod, tcu_mod, pri_large pri_small, pri_mod, tcu_mod, pri_large pri_small, pri_mod, tcu_mod, pri_large pri_small, tcu_mod tcu_mod, pri_large pri_mod, pri_large pri_large tcu_mod tcu_mod tcu_mod 37 ORGANIZATION OF APPENDICES The organization of the Appendices is provided in Table 14. Appendices A and B are dedicated to presenting the data collected during Test-5 and contain the relevant instrumentation lists. The data is presented in engineering units and has been processed in accordance with the procedures described in the "Data Processing" section of this report. All data has been uploaded to NEESHub (www.nees.org) and can be downloaded in raw units (voltage), or in engineering units at prototype scale. Construction drawings for the model structures used in Test-5 are included in Appendix C. TABLE 14. ORGANIZATION OF TEST-5 DATA REPORT APPENDICES Appendix Data A Engineering Unit Data for 3/15/2012 B Engineering Unit Data for 3/19/2012 C Model Structure Construction Drawings 38 REFERENCES Allmond, J., and Kutter, B.L. (2012). “Centrifuge Testing of Rocking Foundations on Saturated and Submerged Sand: Centrifuge Data Report for JDA01,” University of California at Davis Center for Geotechnical Modeling Report No. UCD/CGMDR-12/01, Davis, CA. Dashti, S. (2009) "Toward evaluating building performance on softened ground." dissertation, Univ. of California, Berkeley, Berkeley, CA. Ph.D. Dashti, S., Bray, J.D., Pestana, J.M., Riemer, M.R., and Wilson, D. (2010a) "Mechanisms of seismically-induced settlement of buildings with shallow foundations on liquefiable soil." J. Geotech. Geoenviron. Eng., 136(1), 151-164. Dashti, S., Bray, J.D., Pestana, J.M., Riemer, M.R., and Wilson, D. (2010b) "Centrifuge testing to evaluate and mitigate liquefaction-induced building settlement mechanisms." J. Geotech. Geoenviron. Eng., 136(7), 918-929. Hausler, E.A. (2002) "Influence of ground improvement on settlement and liquefaction: A study based on field case history evidence and dynamic geotechnical centrifuge tests." Ph.D. dissertation, Univ. of California, Berkeley, Berkeley, CA. Kammerer, A., Pestana, J., and Seed, R. (2002). "Undrained Response of 0/30 Sand Under Multidirectional Cyclic Simple Shear Loading Conditions." Geotechnical Engineering Research Report No. UCB/GT/02-01, University of California, Berkeley, July, 2002. Kutter B.L. (1995). Recent advances in centrifuge modeling of seismic shaking. Proceedings of the Third International Conference on Recent Advances in Geotechnical Earthquake Engineering and Soil Dynamics, Prakash S (ed.), St. Louis, MO, 1995. Mason et al. (2010a). “Seismic Performance Assessment in Dense Urban Environments: Centrifuge data report for HBM02,” University of California at Davis Center for Geotechnical Modeling Report No. UCD/CGMDR-XX/XX, Davis, CA. Mason et al. (2010b). “Seismic Performance Assessment in Dense Urban Environments: Centrifuge data report for HBM03,” University of California at Davis Center for Geotechnical Modeling Report No. UCD/CGMDR-XX/XX, Davis, CA. Mason et al. (2010c). “Seismic Performance Assessment in Dense Urban Environments: Centrifuge data report for HBM04,” University of California at Davis Center for Geotechnical Modeling Report No. UCD/CGMDR-03/11, Davis, CA. Mason, H.B. (2011). Seismic Performance Assessment in Dense Urban Environments. Ph.D. thesis, University of California, Berkeley, Berkeley, CA. Mason, H. B., Trombetta, N. W., Chen, Z., Bray, J. D., Hutchinson, T. C., and Kutter, B. L. (2013). "Seismic soil–foundation–structure interaction observed in geotechnical centrifuge experiments." Soil Dynamics and Earthquake Engineering, 48, 162-174, 10.1016/j.soildyn.2013.01.014. 39 Stewart, D.P., Chen, Y.R., and Kutter, B.L. (1998). “Experience with the use of methylcellulose as a viscous pore fluid in centrifuge models.” ASTM Geotechnical Testing Journal, 21(4), 365-369. Trombetta, N. W., Zupan, J. D., Bolisetti, C., Puangnak, H., Jones, K. C., Tran, J. K., Bassal, B., Bray, J. D., Hutchinson, T. C., Fiegel, G. L., Kutter, B., and Whittaker, A. S. (2011). "Seismic peformance assessment in dense urban environments: Centrifuge Data Report for NWT01, Report No. UCD/CGMDR-04/11." Center for Geotechnical Modeling, University of California, Davis. Trombetta, N. W., Mason, H. B., Chen, Z., Hutchinson, T. C., Bray, J. D., and Kutter, B. L. (2013). "Nonlinear dynamic foundation and frame structure response observed in geotechnical centrifuge experiments." Soil Dynamics and Earthquake Engineering, 50, 117-133, 10.1016/j.soildyn.2013.02.010. Wu, J. (2003). "Liquefaction Triggering and Post Liquefaction Deformations of Monterey 0/30 Sand Under Uni-Directional Cyclic Simple Shear Loading." Ph.D. thesis, University of California, Berkeley, Berkeley, CA. 40