International Journal of Human–Computer Interaction
ISSN: (Print) (Online) Journal homepage: https://www.tandfonline.com/loi/hihc20
An Improved Human-Computer Interaction
Content Recommendation Method Based on
Knowledge Graph
Zhu He
To cite this article: Zhu He (22 Dec 2023): An Improved Human-Computer Interaction
Content Recommendation Method Based on Knowledge Graph, International Journal of
Human–Computer Interaction, DOI: 10.1080/10447318.2023.2295734
To link to this article: https://doi.org/10.1080/10447318.2023.2295734
Published online: 22 Dec 2023.
Submit your article to this journal
Article views: 34
View related articles
View Crossmark data
Full Terms & Conditions of access and use can be found at
https://www.tandfonline.com/action/journalInformation?journalCode=hihc20
INTERNATIONAL JOURNAL OF HUMAN–COMPUTER INTERACTION
https://doi.org/10.1080/10447318.2023.2295734
An Improved Human-Computer Interaction Content Recommendation Method
Based on Knowledge Graph
Zhu He
Global Business School, UCSI University, Kuala Lumpur, Malaysia
ABSTRACT
KEYWORDS
Since human-to-human communication is contentful and coherent, during human-computer inter­
action (HCI), people naturally hope that the computer’s reply will be contentful and coherent.
How to enable computers to recognize, understand and generate quality content and coherent
responses like humanshas drawn a great deal of interest from bothindustry and academia.In order
to address the current problems of lack of background knowledge of robots and low consistency
of responses in open-domain HCI systems, we present a content recommendation method on the
basis of knowledge graph ripple network. In order to realize a human-computer interaction system
with better content and stronger coherence, and this model simulates the real process of humanhuman communication. At first, the emotional friendliness of HCI is gotten through calculating the
emotional confidence level together with emotional evaluation value of HCI. After that, the exter­
nal knowledge graph is introduced as the robot’s background knowledge, and the dialog entities
are embedded in the ripple network of knowledge graphsto access the content of entities that
may be of interest to participants. Lastly, the robot reply is given by comprehensively considering
the content and emotional friendliness. The results of the experiments indicate a comparison with
comparative modeling approaches like MECs models, robots with emotional measures and back­
ground knowledge can effectively enhance their emotional consistency and friendliness when per­
forming HCI.
Human-computer inter­
action; knowledge graph;
ripple network; deep
learning
1. Introduction
The evolution of wireless communication technologies and
the spread of social networks have driven transformations in
the field of human-computer interaction (HCI). Every
change in HCI will set off a huge wave of changes in the
information industry. Changes in the information industry
in turn promote the development of the communications
industry. Human-computer interaction technology is com­
mitted to smooth and natural communication between
humans and computers, aiming to dissolve the boundaries
of dialogue between interactive systems and achieve smooth
and natural information exchange between humans and
machines. Specifically, it ranges from the initial command
line human-computer interaction to traditional graphical
interface interaction, and then to various voice control
interactions (Shackel, 1997). Nowadays, the innovation of
interactive interface aesthetics no longer meets people’s
needs. During the interaction process, participants hope to
take into account more convenient and more customary aes­
thetic interaction methods (Ren et al., 2023). In the era of
mobile Internet, human-computer interaction is gradually
changing from computers passively accepting, processing,
and replying to information to actively understanding, proc­
essing, and replying to information, further improving the
user’s interactive experience.
CONTACT Zhu He
julylitbri@outlook.com
� 2023 Taylor & Francis Group, LLC
With the emergence and popularization of various
human-computer interaction systems, the relationship
between humans and machines, data, and information has
been broken. Human-computer interaction is developing in
the direction of natural human conversation and towards a
more intelligent and natural human-computer interaction.
interactive development. Conventional passive interaction
logic is very simple. The user gives instructions to the
machine, the machine executes them and gives the results
back to the user. While the entire process is straightforward
and efficient, it is not natural or intelligent. Real intelligence
and nature should be when the machine actively provides
natural and intelligent services to users through perception
and prediction. Human-computer interaction systems are
also developing from passively accepting user information to
actively understanding user intentions. This change in inter­
action methods will enable machines to more naturally and
accurately understand user intentions or emotions to pro­
vide services for users. Such a change requires intelligent
robots to have stronger emotional perception and intelligent
understanding capabilities. In order to achieve such a goal,
more and more academics and industrial people have
launched many researches including robot cognitive and
emotional computing (Zhou and Wang, 2017), robot per­
sonalization (Irfan et al., 2019), robot anthropomorphism
Global Business School, UCSI University, Kuala Lumpur, Malaysia
2
Z. HE
(Spatola et al., 2019), robot intelligent dialogue (Jokinen,
2018), etc.
The study of knowledge graph-based content recommen­
dation techniques for HCI is the focus of this article. Our
suggested model technique replicates the true human-tohuman communication process in an open domain inter­
active system. Initially, the robot’s background knowledge is
considered to be represented by the knowledge graph.
Second, during human-to-human contact, the ripple net­
work is employed to imitate the waking of locally relevant
background information. This article is focused on know­
ledge graph-based HCI content recommendation, which
offers helpful investigation for implementing a more natural
and intelligent HCI system in both closed and open
domains.
2. Related work
Letting robots have similar capabilities to human brains is
the eventual goal of HCI, and it is a long and arduous chal­
lenging task. Since 1951, academia and industry have widely
adopted the ideas proposed by Turing in “Computers and
Intelligence” and used human-machine dialogue to test the
intelligence level of robots. Usually, humans perceive the
intelligence or emotional intelligence level of a robot
through the content of its reply during human-computer
interaction. Human-computer interaction systems are div­
ided into task-driven closed-and open-domain dialogue sys­
tems without specific tasks. In the industrial world, the next
generation of human-computer interaction mainly takes the
form of dialogue systems, and many technology companies
have invested in research and development work and have
also developed some products with commercial value
(Adamopoulou and Moussiades, 2020; Hoy, 2018). We ana­
lyze the current research status of content recommendation
by robots in open domain and closed domain interactive
systems respectively.
2.1. Research status of robot content recommendation
in open domain
The human-computer interaction system under the open
domain has the following two distinctive characteristics.
First, participants can input any content of interest, and
there are no clear reply rules for the robot’s replies. The
reply content only needs to take into account the partici­
pants’ emotions and the relevance of the content. Second,
the robot, which plays the role of companion in the humancomputer interaction process, does not have background
knowledge, and its replies are not very relevant. Many
researchers have conducted various studies on robot content
recommendation under human-computer interaction sys­
tems in the open domain. In the literature (Liu et al., 2017),
the author argued that participants’ expression changes gen­
erate external emotional stimuli for the robot and presented
a successive cognitive emotion regulation model that can
endow the robot with certain emotional cognitive capabil­
ities. For realizing the intelligent emotional expression,
Rodr�ıguez et al. (2016) presented an emotion generation
frame that allows robots to generate the same emotional
state as the participants, which can build emotional trust
between both parties in the interaction during the dialog.
Jokinen and Wilcock (2013) maps real-life realistic emo­
tional states into the PAD 3D space, where the value of each
dimension on the 3D axes is given by a psychological attri­
bute. The emotional space model of PAD is applied to
express the various successive emotional states of a robot.
To fulfill the emotional demands of participants during
HCI, robots are gradually realizing the emotional intelli­
gence ability of “sorrowing you when you are sad, and
happy when you are happy”. The authors proposed an
Emotional Chatting Machine (ECM) in the literature (Zhou
et al., 2018). They quantified unique human emotions and
introduced them into the generative dialogue system so that
the robot can not only extract emotions from the partici­
pants’ dialogue content but also make empathetic responses
from an emotionally consistent direction. The purpose of its
research is to enable robotic responses to participants’ emo­
tions. Adamopoulou and Moussiades (2020) made a
sequence-to-sequence improvement for emotional issues in
dialogue. First, three-dimensional word vectors with emo­
tional information are introduced. Second, for better results,
the emotional dissonance loss function is minimized and the
emotional content is maximized. Finally, emotional factors
are comprehensively considered to allow the decoded con­
tent to have a variety of Different emotional responses. A
series of improvements are designed to enable decoding
emotionally diverse replies from candidate replies. Liu et al.
(2017) presented an emotion regulation model on the basis
of guided cognitive reappraisal under continuous external
emotional stimulation. This model is able to achieve positive
emotional responses from the robot. When participants are
in an emotional state of weak emotional involvement, they
can also respond positively to the reply, which improves the
participants’ positive emotional tendencies. In order to
achieve contextual coherence and natural and coherent con­
tent connection during human-computer interaction, robots
are gradually endowed with external knowledge. Lowe et al.
(2015) first chooses external knowledge of unstructured text
relevant to the conversation content context with TFIDF
(Term Frequency–Inverse Document Frequency) and subse­
quently utilizes a convolutional neural network (Recurrent
Neural Network, RNN) encoder to present knowledge.
Lastly, the scores of the candidate responses are computed
according to the external knowledge and contextual seman­
tics to make sure the accuracy of the bot’s responses. Young
et al. (2018) proposed to store the common-sense knowledge
graph in an external memory module. The authors encode
queries, responses, and common sense through the Tri-LSTM
(Triggered Long Short-Term Memory) model. Then, they
combined relevant common sense with the retrieval dialogue
model to get more precise responds from the robot, resolving
the issue of background common sense being lacking in HCI.
A deep neural matching network-based learning framework
was presented by Yang et al. (2018). Utilizing question-andanswer sessions and pseudo-associative feedback, the authors
INTERNATIONAL JOURNAL OF HUMAN–COMPUTER INTERACTION
score the retrieval dialogue system’s response set based on
external knowledge. This has the advantage of incorporating
outside information into the deep neural network, which
enhances the coherence of settings in HCI.
2.2. Research status of robot content recommendation
in closed domain
Human-computer interaction systems in closed domains
have the following two distinguishing features. First, the par­
ticipants’ input was limited to a particular domain, and the
robot’s reply content is limited to a specific field. Replies to
specific fields often require standardized answers. Second,
robots usually play the role of facilitator in the interaction
process. In this process, the relevance of the robot inter­
action environment is essential. The major goal of the
closed-domain dialogue system is to guide participants to
complete their demands in a specific field, and during the
interaction process, the participants feel that the communi­
cation method is similar to human communication, and the
communication process is natural and smooth. Closed
domain task-based dialogue model frameworks are divided
into two major categories, one is a pipeline model-based
framework, and the other is an end-to-end model
framework.
In a framework on the basis of the pipeline model, intent
recognition has always been a research focus in this field.
Jeong and Lee (2008) suggested a coordinated probabilistic
model of a triangular chain of conditional random fields.
The model denotes meta-sequence and sequence labels
jointly in a single graph structure, which explicitly encodes
the association between them while retaining the uncertainty
between the sequences. By extending the linear chain tri­
angle chain conditional random field probabilistic model,
the model enables efficient inference and evaluation
methods.
Xu and Sarikaya (2013) suggested a neural network ver­
sion according to the triangular conditional random field
algorithm model. In this model, intent tags and slot sequen­
ces are jointly modeled using their correlation, and their fea­
tures are automatically extracted through the convolutional
neural network layer and shared by the intent model,
achieving clearer intent discovery. Guo et al. (2014) imple­
mented a task-oriented dialogue system and solved the
problem of completing various online shopping-related tasks
through natural language dialogue. The authors established
a task-based dialogue system for e-commerce through nat­
ural language processing technology and data resources, and
realized good effects in practical applications. Yan et al.
(2017) implemented generalization via successive spatial rep­
resentations and applied arithmetic operations to these rep­
resentations
to
realize
combinatoriality,
including
feedforward and recurrent neural network language models.
This model provides an elegant mechanism to merge the
discrete syntactic structures with the representations of
phrases and words in continuous space into a powerful
combinatorial model to provide additional feature informa­
tion for intent detection.
3
In the last few years, with the boom in social networks
and deep learning, end-to-end closed-domain dialogue sys­
tems have been developed more strongly. Liu and Lane
(2017) proposed an optimized deep reinforcement learning
framework for dialogue systems on the basis of end-to-end
task. The dialogue agent and user simulator are jointly opti­
mized through deep reinforcement learning. The authors
simulate the dialogue between the two agents and imple­
ments a reliable user simulator that achieves good results in
the movie ticket booking scenario. Wen et al. (2016) pro­
posed a target-oriented trainable dialogue method and a
new approach to the collection of dialog data on the basis of
a new pipeline framework through neural network text input
and end-to-end text output. In this article, the author con­
structs a dialogue system to achieve better results in restaur­
ant search applications. Su et al. (2016) presented an active
learning Gaussian process model. Such Gaussian process
runs on successive spatial dialog representations, which are
produced in an unsupervised way utilizing recursive neural
network codecs. This framework can greatly decrease the
user feedback noise and the costs of data annotation in dia­
log strategy learning.
While the aforementioned studies do, to some extent,
take into account the two primary factors of external know­
ledge and emotional state during HCI, some only take into
account the impact of a single interaction round and neglect
the coherence of the context, or they only take into account
the robot’s reaction to the emotional state in the context.
The robot’s reaction is evaluated, or rather, solely the effect
of contextually relevant external knowledge.
We proposed an HCI model according to the ripple net­
work of knowledge graph with the goal of enhancing the
emotional friendliness of the robot during the HCI process
in order to address the issues of lack of background know­
ledge and low coherence of responses in the current HCI
model. We examine the participants’ emotional friendliness
and replicate the process of background knowledge awaken­
ing during a human-to-human conversation by introducing
the external knowledge graph as the robot’s background
knowledge. In accordance with the experimental data, robots
with emotional measurements and prior information may
evidently raise their emotional friendliness and coherence
during HCI, in contrast to contrasting model techniques like
MECs models.
3. Content recommendation method based on
knowledge graph ripple network
Human learning, life, work, and other experiences will be
stored in the brain as associated memories, and these
memories can be viewed as individual background know­
ledge (Richmond and Nelson, 2009). The communication
process among people can be seen as a process in which
background knowledge is constantly awakened. During
the communication process, one party’s strong emotional
desire to communicate will usually keep the conversation
going. Correspondingly, during human-computer inter­
action, humans naturally hope to communicate with a
4
Z. HE
knowledgeable and emotional robot. How to enable robots
to use background knowledge to achieve emotional com­
munication like humans during HCI is the focus of many
scholars. Our proposed model in this section simulates
the interaction process between people that considers
both content and emotion. The ripple network of know­
ledge graph enables the discovery of content that may be
of interest to participants and the emotional friendliness
of HCI realizes the calculation of the emotional process of
participants.
2.
basis of this. An overall raising tendency in the partici­
pants’ emotional states during the interaction process is
indicative of a healthy interactive relationship.
Assessment of the content connection between HCI:
People communicate with one other through a process
of ongoing background knowledge awakening, and the
contents of communications are correlated. We subse­
quently employ this information to perform a correl­
ation analysis on the content of the human-computer
dialogue and identify any potentially fascinating partici­
pant content on the knowledge network.
3.1. Problem description
When two engaging individuals converse on a specific prob­
lem in an open domain, the topic’s substance will progres­
sively expand as the conversation goes on, and both parties’
prior knowledge will gradually come to light. The party with
prior knowledge of the interaction process is referred to as
the participant in the present HCI system. When carrying
out multiple rounds of dialogue, the participants’ willingness
to participate will be substantially diminished through the
dialogue system, which will eventually happen in the end of
the dialogue, if the system fails to present new content or if
the content introduced is not relevant enough or is not
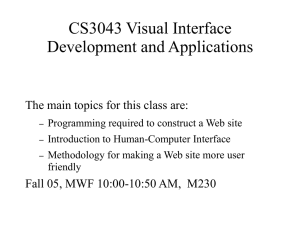
emotionally expected by the participants. In Figure 1, the
process of HCI is displayed. The participants in robot and
HCI are represented by R and H, respectively.
3.1.1. Problem formalization
From Figure 1, it can be observed that the participant’s
k
input in the k-th interaction system is CH
: Supposing that
the friendliness of the emotional interaction between the
robot and the participant is R(k), what requires to be
gotten is the content CRk of the robot replies to the partici­
pant in the k-th conversation. Its concrete mathematical
expression is:
�
�
k
f : RðkÞ, G, CH
! CRk
(1)
3.1.2. Emotional friendliness of HCI
HCI is an ongoing process. The current emotional state is
not only associated with the content of the current interactive
dialog, but also with the content of the historical interactive
dialog. The update function that defines the human-computer
interaction emotional friendliness R(k) based on the current
and historical interactive session content is:
RðkÞ ¼ minð1, maxðRðk − 1Þ þ WðkÞ � CðkÞ, 0ÞÞ
(2)
Among them, R(k) is the emotional friendliness of the
kth human-computer interaction, and the range of value is
[0,1]. The lower the value, the poorer the emotional inter­
action state. Conversely, the larger the value, the better the
emotional interaction state. The initial value of R(0) is 0.5,
which suggests that the HCI association is indeterminate.
W(k) is the emotional evaluation value of the interaction
input, with an initial value of 0 and a range of [−1]. When
their values were positive and plural, the participants’ emo­
tional states were positive and negative, respectively. With
an initial value of 0, C(k) is the emotional confidence of
HCI and denotes the reinforcement impact of persistently
negative or positive feelings. In other words, both the emo­
tional certainty and the value of C(k) rise when the two
conversations have the same emotional tendency. The degree
of confidence declines when the two conversation’s emotions
diverge. We will define C(k) and W(k) in detail below.
Input and output:
Knowledge graph G is being introduced when the system
is initialized. During the interaction, the input of the partici­
k
, and the
pant is the content of the k-th conversation CH
output of the system is the content of the k-th robot’s
reply CRk :
Considerations:
3.1.2.1. Human-computer interaction emotion assessment.
Interactive input emotions were quantified into vectors with
numerical values according to the literature (Park et al.,
2011) in order to more accurately quantify and compute
emotions. The six fundamental emotion states that make up
the PAD emotion space’s emotion vector are happiness, dis­
gust, surprise, sadness, fear, and anger. Its specific definition
is as follows:
1.
hl ¼ ðEp − El ÞCl ðEp − El ÞT l ¼ 1, 2, 3, 4, 5, 6
(3)
�
�
Among them, Ep ¼ pp , ap , dp represents the emotion of
interactive input, that is, combining the PAD emotion
model in psychology to analyze the semantic sense to obtain
the input emotion. The values of l are 1, 2, 3, 4, 5, and 6,
respectively representing the six emotions of happiness, dis­
gust, surprise, sadness, fear, and anger. El represents the
coordinate set of fundamental emotional states in PAD
space, which is used as a standard emotion measurement
vector. Cl represents the set of covariance matrices of
Assessment of emotional connection in HCI: HCI is an
ongoing process of interaction, and the participants’
emotional attachment to the material influences the dia­
logue’s continuity. We first assess the human-computer
dialogue’s friendliness of emotional interaction on the
Figure 1. Diagram of content input and output during HCI.
INTERNATIONAL JOURNAL OF HUMAN–COMPUTER INTERACTION
underlying emotional states in the PAD space. Later, hl
denotes the separation between the basic emotion El and
interactive input emotion Ep acquired under Cl constraint.
This distance corresponds to 6 emotional states.
The interactive input sentiment evaluation function was
defined as P(Ep), and normalize its corresponding emotion
intensity l, as shown in Equation (4). To make sure that the
formula makes sense, we especially define hl not to be zero,
which is expressed as follows by Equation (5).
8
1=h
>
>
> pl ¼ P6 l ,
hl 6¼ 0
>
<
k¼1 1=hk
(4)
l
6
X
X
>
>
>
p
¼
1,
p
¼
p
¼
0,
h
¼
0
i
i
l
>
: l
i¼0
i¼lþ1
PðEp Þ ¼ ½p1 , p2 , p3 , p4 , p5 , p6 �
(5)
For the k-th conversation, the emotion evaluation of HCI
can be defined as follows:
WðkÞ ¼ p1 þ 0:6p2 þ 0:2p3 − 0:2p4 − 0:6p5 − p6
(6)
The range of the emotional evaluation value W(k) is
[−1]. When the value is positive, it means that the emo­
tional state of the participant is positive. On the contrary,
when the value is negative, it means negative emotion.
3.1.2.2. Emotional confidence in human-computer inter­
action. Emotional certainty represents the influence of previ­
ous emotional states on subsequent emotional states. When
the same emotion appears continuously, it will strengthen
this emotion. Now define the dynamic change of C(k) as
follows.
8
�
�!!!
>
�WðkÞ − Wðk − 1Þ�
>
>
�
>
,
min 1, max 0, Cðk − 1Þ þ 1 − ��
>
�
>
>
2
>
>
<
WðkÞWðk − 1Þ � 0
CðkÞ ¼
�
� !!
>
�
�
>
> min 1, max 0, Cðk − 1Þ − �WðkÞ − Wðk − 1Þ�
>
,
>
�
�
>
2
>
>
>
: WðkÞWðk − 1Þ < 0
(7)
The interactive emotional confidence C(k) is closely related
to the interactive emotional evaluation value W(k).
Continuous positive emotional evaluation values will posi­
tively promote emotional certainty and make the humancomputer interaction state more positive. Continuous negative
emotional evaluation values will reversely promote emotional
certainty, which enhances the negativity of the entire inter­
action state. The psychological process of genuine interper­
sonal communication is more in accordance with the
emotional certainty evaluation process.
3.1.3. Knowledge graph ripple network content recom­
mendation method
3.1.3.1. Knowledge graph ripple network. The Knowledge
Graph (KG) is a type of heterogeneous graph where the
edges represent relationships and the nodes represent enti­
ties. Triples (tail entity, relationship, head entity) are the
5
forms that relationships and entities take to construct a het­
erogeneous network. The following benefits arise from inte­
grating knowledge graphs into recommendation systems:
First, it can provide rich semantic information, allowing the
recommendation system to recommend richer and more
diverse content. For example, a recommendation system
based on knowledge graphs can semantically link movies,
music, etc. that users have previously liked, thereby recom­
mending more relevant content. Second, it can semantically
link various information to enable recommender systems to
better understand the interests and needs of users, thereby
improving the recommendation effect. By analyzing the enti­
ties, relationships and attributes in the knowledge graph,
more precise personalized recommendations can be realized.
Third, it provides a structured model that can express the
recommendation logic of the recommendation system more
clearly, making the recommendation results easier to under­
stand and explain. Currently, there are three main categories
of recommendation methods based on knowledge graphs:
embedding-based knowledge graph recommendation, pathbased knowledge graph recommendation, and hybrid
method-based knowledge graph recommendation.
This complex relationship in the knowledge graph pro­
vides us with a deeper and broader content perspective,
which corresponds to the relevance of the real objective
world and provides prerequisites for the expansion of par­
ticipant dialogue content in human-computer interaction
systems. A common representation of knowledge graphs is
triples, namely G ¼ (H, R, T). Here, H ¼ {e1, e2, … ,eN}
denotes the set of head entities in the knowledge base, N
represents the entities number, R ¼ {r1, r2, … , rM} denotes
the combination of connections in knowledge base, M is the
entity relationships number, T is the set of tail entities in
knowledge base, and T � H � R � H:H(head), R(relation),
T(tail) form a triplet, namely head entity-relationship-tail
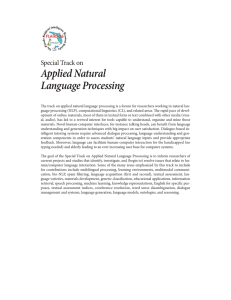
entity. A simple triplet link is from Figure 2.
Figure 3 illustrates the activation of underlying entities of
participants by dialog entities, in which entities A and B are
the entities participating in the content of the participants’ dia­
logs in a certain human-computer interaction process. The
entity number of entity A’s first-level association is (1, 4, 5),
and the entity number of entity B’s first-level association is (1,
8, 9). The common first-level associated entity number of
entity A and entity B is 1. The entities involved are the shaded
parts in Figure 3(b). The second-level related entities of entity
A are numbered (2, 3, 6, 7) and those of entity B are num­
bered (2, 7). The common number of the second-level related
entities of entity A and B is (2, 7), the involved entities are as
shown in the shaded part in Figure 3(c).
Based on this reasoning, we can conclude the entity number
of the lower association hierarchy of entity A or entity B (the
lower the relationship, the higher the level of association).
Content that may be of interest to a participant is activated
through conversation entities and propagated along hierarchical
connections in the knowledge graph from strong to weak and
near to far. As the number of related entities raises, the interest
of the user reduces, which correlates with the shaded area in
Figure 3. Such a process is similar to the propagation of water
6
Z. HE
Figure 2. Example of knowledge graph perspective.
Figure 3. Knowledge graph ripple network propagation model diagram.
ripples from strong to weak and near to far. The water ripple’s
amplitude will progressively weaken as they propagate from
near to far. Similarly, the influence of dialogue entities on enti­
ties with lower correlation levels gradually becomes smaller,
and during the ripple propagation process, interference super­
position effects will occur at certain entities to highlight certain
entities (common related entities). Finally, the entity content
that the participants are interested in is optimally selected
based on their emotional tendencies. The above entire process
describes the HCI model.
To utilize the knowledge graph to dig out the potentially
interesting content of the participants, entity extraction and
disambiguation are performed on the dialogue content of the
participants through entity linking (Sil and Yates, 2013), and
the dialogue entity set in the interaction process is obtained,
and then the entities are the set is embedded into the ripple
network of the knowledge graph. The relevant sets in the rip­
ple network of knowledge graph are specified as below.
According to the propagation model of the ripple network
of the knowledge graph, the set of participant dialog entities
that we acquired in the kth conversation is defined as below.
�
�
Hk ¼ hk jhk 2 G
(8)
In which, G represents the known knowledge graph,
hkand k denote the dialogue entity and dialogue round. The
ternary ripple of the obtained set of participant dialog enti­
ties Hk is given in below:
�
�
(9)
Skn ¼ ðh, r, tÞjðh, r, tÞ 2 Gh 2 Hk , n ¼ 1, 2, ::, N
Here, n stands for the associated entity level, eg, S11 denotes
the first-level associated entity of dialogue entity in the first
conversation. The set of responses from the participants is in
INTERNATIONAL JOURNAL OF HUMAN–COMPUTER INTERACTION
turn derived from the retrieval formula and a vector of sen­
tence feature representation v 2 Kd is obtained by using the
word2Vec (Mikolov et al., 2013) method and the Embedding
Average vector mean method to obtain the content of the
reply set. In which, K and d stand for the feature representa­
tion vector and word vector dimension, separately. We com­
pute the probability of association pi between the sentence
feature vector v and each triad (ti, ri, hi) in the first-level
associated entity of ripple set Sk1 in the k-th conversation with
the formula:
�
exp ðvT Ri hi Þ
pi ¼ softmax vT Ri hi ¼ P
(10)
ð T Þ
ðh, r , tÞ2Sk1 exp v Rh
Here, hi 2 Kd and Ri 2 Kd�d stand for the entity vectors
of ripple sets hi and ri separately. The entity vectors of the
ripple set triad (ti, ri, hi) are acquired by the feature learning
method Trans D for the knowledge graph, and the respect­
ive corresponding entity vectors stand for ti, ri, and hi. pi
can be viewed as a probability that gauges the similarity
between the entity hi and the word vector vin the relation
Ri space. After getting the correlation probability, we later
compute the effect of the dialog entity on the tail entity r of
the first-level correlated entities. We can compute vector o1.
X
o1 ¼
pi ti
(11)
ðhi , ri , ti Þ2S11
Vector o1 is the first-order response of sentence feature
vector v, in which ti 2 Kd : With Equations (10 and 11), the
content of interest to the participants is distributed far along
the hierarchical relationship of knowledge graph. The secondorder response o2 is acquired from replacing the sentence
vector v in Equation (10) by the vector o1 in Equation (11).
This process is repeated on ripple set, ie, the values of n in Skn
are 1 and 2 separately. It stands for the secondary propagation
of the participant’s conversational entities on the knowledge
graph ripple network. Since too large an order response
dilutes valuable information, the value of N in Equation (9) is
2 or 3. In summary, the formula for the participant’s response
with respect to vector v can be represented as.
H
X
O¼
oi
(12)
i¼1
The normalized content probability is:
y ¼ rðOT vÞ
(13)
Equation (13) was defined as the content friendliness of
participant, where the sigmoid function is as below:
1
1 þ exp ð−xÞ
value in the range [0, 1]. As the value gets closer to 1, the
participant is more satisfied with the response.
3.1.3.2. Construction of knowledge graph ripple network
interaction model. First of all, a knowledge graph G (in this
paper, we adopt CN-Dbpedia, a Chinese general encyclope­
dia knowledge graph developed and maintained via Fudan
University) is given, and the input to the model is the con­
k
, and the
tent of the kth participant’s interaction input CH
output is the content of the kth þ 1th robot’s reply CRkþ1 :
Next, the ripple network of knowledge graph is employed
for assessing the friendliness of the participant’s dialogue
material, and emotional friendliness is applied to establish
the participant’s continuous emotional state vector.
Ultimately, the robot’s best response is identified via taking
into account both the friendliness of the content and the
participant’s emotional state vector. In particular, Table 1
illustrates how the ripple network of knowledge graph inter­
action model is built.
4. Experimental design and result analysis
4.1. Experimental framework
We modified ChatterBot in Python to the suggested model
and simulated it as text chat for performing an efficient
experimental comparison of the suggested HCI model con­
tent recommendation approach. The ChatterBot framework
is represented by the solid line in the model process struc­
ture presented in Figure 4, while the expanded content is
represented by the dotted line. During HCI, facial expres­
sions, voice, gestures, as well as other cues are employed to
evaluate emotional friendliness.
4.2. Experimental data and comparative models
The experimental data is derived from the conversation
material of the 2018 NLPCC task Open Domain Question
Answering, ie, Chinese dialogue question and answer. In the
corpus, there are 24,479 pairs of questions and answers. We
designate 2500 pairs of questions and answers at random to
serve as the verification set, another 2500 pairs at random to
serve as the test set, and the rest of the pairs to serve as the
model training set.
We have chosen these four models for comparison tests
in this section.
(14)
1.
In combination with Equations (2) and (13), we add con­
tent- and sentiment-friendliness weights to the content of
candidate responses, normalized as below.
2.
yv ¼ aRðkÞ þ by
3.
rðxÞ ¼
(15)
Where a and b are the constraint factorsa þ b ¼ 1 (the
default is a ¼ b ¼ 0.5, which will be described in more detail
later in the experimental discussion section). Yv takes the
7
Literature (Sutskever et al., 2014) is a dialogue model
that automatically generates replies based on Seq2Seq of
LSTM network.
Literature (Gunther, 2019) is a ChatterBot interaction
model that sorts answers and outputs them based on
confidence level.
Literature (Zhang et al., 2018) takes into account the
“empathy” of the participants in the interaction and
chooses emotionally similar replies as responses, thereby
realizing an emotional MECs dialogue cognitive model.
8
Z. HE
Table 1. Modeling of human-computer dialogues on the basis of knowledge graph ripple network.
Input: The k-th participant inputs content CHk , known knowledge graph G;
Output: The response content CRkþ1 of the robot for the k þ 1th time
(1) Repeat:
(2) Return the n replies with the highest semantic confidence based on the participant’s k-th interactive input, and vectorize the reply sentences to obtain their
feature representations; perform entity extraction and disambiguation of the dialogue content through entity connection;
(3) Calculate the emotional friendliness R(k) of the k-th participant’s interactive input according to patterns Equations (2)–(7);
(4) According to Equations (8) and (9), the ripple set of associated entities is obtained;
(5) According to Equations (10)–(14), the content response probability of the candidate reply is obtained;
(6) According to Equation (15), the normalized values of content friendliness and emotional friendliness are obtained, that is, the satisfaction value of the
candidate reply;
(7) Select the maximum satisfaction value yv as the reply content;
(8) k ¼ k þ 1;
(9) Until the participant stops interactive input;
(10) The human-computer interaction session is terminated.
Figure 4. Content recommendation method process framework according to the ripple network of knowledge graph.
4.
Literature (Lowe et al., 2015) is a Concept Net cognitive
model that states general knowledge in an external
memory module and incorporates associated general
knowledge into the retrieval dialog.
4.3. Evaluation metrics
The two measures we employ to objectively assess the accur­
acy of model response are Mean Average Precision
(MAP)together with Mean Reciprocal Rank (MRR).
Whereas MAP represents the accuracy of a particular statis­
tic, MRR reflects overall accuracy. Both indicators are
defined as below:
MRR ¼
k
1 X
1
jkj i¼1 rankqi
8
k
>
>
1 X
>
>
AveðAi Þ
< MAP ¼
jkj i¼1
Pn
>
>
j¼1 ðrðjÞ=pðjÞÞ
>
>
: AveðAi Þ ¼
n
(16)
(17)
where k stands for the number of times a participant has
q
engaged in a conversation and ranki stands for the ordering
of the i-th participant’s response in the reply set. Ave(Ai)
denotes the mean accuracy of the ordering of the responses
of the i-th conversation model. p(j) denotes the ordering
level of the j-th answer in the adjusted response set after the
model has adapted the ordering of the candidate reply set
taking into account the given constraints; r(j) denotes the
ordering of the j-th answer in the standard reply set; and n
indicates the number of replies in the standard reply set.
MAP expresses the mean accuracy of single-valued accuracy
of response performance.
To confirm the model’s efficacy, a manual assessment
technique was employed to enlist 40 participants as needed
to engage with chatbots using varying cognitive models.
First, determine the length of the debate between a person
and a computer by measuring each model’s efficacy in terms
of time. Next, ask the volunteers to rate using the assess­
ment criteria for Sentiment and Fluency. Table 2 displays
the evaluation criterion table.
We assume that there are 10 candidate responses in the
standard reply set, or that the number of standard reply sets
INTERNATIONAL JOURNAL OF HUMAN–COMPUTER INTERACTION
9
Table 2. Evaluation indicators of ripple network content recommendation method based on knowledge graph.
Fluency
Evaluation index
The content is relevant, grammatically fluent, and consistent with human communication.
The content logic is barely relevant, and the grammatical expression is acceptable.
Content lacks logical relevance, the answers are incorrect, and the expressions are confusing.
Evaluation index
Responses are emotionally appropriate and expressive and interesting
Responding with appropriate emotion
Vague expressions, meaningless replies, etc.
þ2
þ1
þ0
Sentiment
þ2
þ1
þ0
Table 3. Objective assessment results of various cognitive models.
Models
Seq2Seq
ChatterBot
MECs
ConceptNet
Ours
MRR
MAP
0.3729
0.4514
0.5820
0.6317
0.6492
0.4123
0.4871
0.6114
0.6513
0.6696
is 10. This allows us to compute the outcomes of the two
objective evaluation indicators of MRR and MAP. Table 3
displays the results of the computation.
Table 3 presents that our suggested model outperformed
the other four comparison models in terms of results. The
primary explanation for this is that the model sorts the can­
didate reply set based on both content and emotional friend­
liness. It limits the reply content not only in terms of the
coherence of objective things but also in terms of subjective
emotional friendliness. When comparing the ChatterBot and
Seq2Seq models, the ConceptNet and MECs models per­
formed better than the others. The rationale is that
ConceptNet presents external knowledge graphs as com­
mon-sense knowledge, and MECs take empathy into
account during the interaction process. To improve the
model’s performance, they take into account, respectively,
background knowledge and emotional elements. Seq2Seq
has the lowest grade because it produces a large number of
nonsensical responses while accounting for interaction pro­
cess security. Again, objective assessment confirmed the effi­
caciousness of our suggested strategy in raising response
accuracy.
The impact of varying gender and age groups on the
assessment of the dialogue system’s interaction effect must
be taken into account throughout the process of manual
evaluation. Forty participants, varying in age and gender,
were asked to engage with each model, and the duration of
each interaction as well as the number of rounds were
recorded. Table 4 exhibits the statistical results. We then
rated 40 volunteers’ satisfaction with Fluency and Sentiment
according to different gender groups and different age
groups. The gender group consists of 20 males and 20
females, respectively, group 1 and group 2. Table 5 displays
statistical results.
In the age group, 19–23 years old is group 3, and 24–
28 years old is group 4. Each age group consisted of 2
females and 2 males (19–22 years old are undergraduates,
23–25 years old are undergraduates) Those aged between 26
and 28 years old are master students, and those between 26
and 28 years old are social workers. Table 6 displays the stat­
istical results.
Table 4. Statistics on the number of rounds and time of interaction between
models and volunteers.
Models
Average number of interaction
rounds/person
Average interaction
time/person
6.350
6.850
7.925
9.850
11.250
71.32
72.57
83.26
109.63
122.45
Seq2Seq
ChatterBot
MECs
ConceptNet
Ours
Table 5. Statistics on the Fluency and Sentiment scores of each model by vol­
unteers in the gender group.
Fluency
Models
Seq2Seq
ChatterBot
MECs
ConceptNet
Ours
Group 1
0.82
1.26
1.47
1.48
1.55
Sentiment
Group 2
0.75
1.18
1.41
1.46
1.48
Group 1
0.63
0.84
1.42
1.36
1.50
Group 2
0.68
0.97
1.46
1.43
1.53
Table 6. Statistics on fluency and sentiment scores of each model by volun­
teers in age groups.
Fluency
Models
Seq2Seq
ChatterNot
MECs
ConceptNet
Ours
Group 3
0.68
1.32
1.39
1.50
1.54
Sentiment
Group 4
0.62
1.27
1.32
1.41
1.45
Group 3
0.67
0.82
1.50
1.43
1.54
Group 4
0.74
0.85
1.50
1.49
1.53
Table 4 shows that when in contrast to other models, vol­
unteers and the model applied in this chapter did superior
in terms of the duration of interactions and the quantity of
interaction rounds. Tables 5 and 6 indicate that in this chap­
ter, the model received higher results in terms of Sentiment
and Fluency than other models from volunteers of varying
ages and genders. The model in this chapter, which consid­
ers emotional friendliness and coherence of material, has
been manually evaluated and demonstrated to be capable of
extending both the number and duration of discussion
rounds in HCI.
4.4. Experimental discussion
We address the constraint parameters a and b in Equation
(15) to examine the real effects of content and emotional
friendliness on the model in more detail. We just need to
talk about how a between [0,1] affects the model because
there is a link between b ¼ 1–a. The two indicators, MAP
and MRR, are still measured utilizing objective assessment,
and their values are likewise identified via applying the
number of standard answer sets (n ¼ 10).
10
Z. HE
Table 7. Evaluation results of different knowledge perception models.
Models
ChatterBot
DISAN
BIMPM
Ours
MRR
MAP
0.4512
0.5638
0.5711
0.6223
0.4354
0.5775
0.5628
0.6316
Figure 5. MAP objective evaluation results.
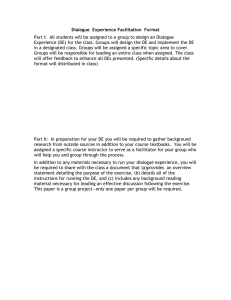
Figure 7. Satisfaction survey of volunteers interacting with customer service
robots.
Figure 6. MRR objective evaluation results.
Figures 5 and 6 indicate that the model in this section
outperforms the MECs and ChatterBot models in the object­
ive assessment of MRR and MAP when a approaches 0,
while the difference is negligible when in contrast to the
ConceptNet model. The rationale is because the ConceptNet
model and the model in this section only take content
coherence into account when subjected to this restriction.
When a approaches 1, the model in this chapter also
achieves better results than the ChatterBot model and
ConceptNet model in the objective assessment of MRR and
MAP, however, the difference is small in comparison to the
MECs model. The rationale is because both the MECs
model and the model in this chapter only take emotional
elements into account when faced with this limitation. The
model in this chapter outperforms the comparative model in
the objective assessment of MRR and MAP when a is nearer
to 0.5. This is due to the fact that at that point, both content
and emotional friendliness are considered, which may sub­
stantially raise response accuracy.
We employed a manual evaluation technique to confirm
the model’s efficacy, which was implemented by 30 online
shopping volunteers interacting with chatbots with different
cognitive models. The classic Likert scale in psychology was
used to allow volunteers to rate the accuracy, friendliness,
and acceptability of each interaction model. The scoring
details are listed below: very satisfied with five points, satis­
fied with four points, unsure with three points, dissatisfied
with two points, and extremely dissatisfied with one point.
The indicator evaluation uses the results of calculating
the two indicators MRR and MAP. In order to compute the
two indicator values, we assume that there are n ¼ 10 recov­
ery sets. Table 7 presents the results.
Table 7 illustrates that the knowledge perception model
that presented in this section has superior outcomes in con­
trast to other model methods. The reason is that this model
method provides a more profound representation of the dia­
logue content of the participants. First, we extract knowledge
from the participants’ dialogue content to obtain the partici­
pant dialogue entity set. After obtaining the dialogue enti­
ties, we link the entities to form word link entities. Not only
that, we also perform first-order external expansion on each
entity to form word expansion entities. Secondly, we vector­
ize the obtained participant conversations and obtain a vec­
tor set of participant knowledge vectors through the
knowledge-aware deep learning network. Finally, we dynam­
ically obtain the focus of participants’ attention on the basis
of the attention mechanism and give the optimal content
reply. Therefore, the modeling approach presented in this
section can get better assessment results.
In the manual evaluation, we also invited 30 volunteers
to interact with each model and then perform scoring oper­
ations. Volunteers rated each model from three aspects:
acceptability, accuracy, and friendliness. The statistical
results after averaging are presented in Figure 7. Figure 7
displays that in the statistical results of volunteer scoring,
the model approaches in this chapter are superior to other
models. Specifically, the modeling approach in this chapter
is slightly superior to the BIMPM and DISAN model, as
well as to the ChatterBot model. For the four models, volun­
teers gave good scores for the acceptability, accuracy, and
friendliness of the models during the interaction process.
INTERNATIONAL JOURNAL OF HUMAN–COMPUTER INTERACTION
For the ChatterBot model, volunteers rated all three items
near satisfaction. Volunteers gave the BIMPM model and
DISAN model a score between 4 and 4.5. The volunteers
gave the model in this chapter a score of around 4.5. From
the scores, we can see how satisfied the volunteers are with
the model.
The acceptability of the four models was affirmed by volun­
teers. Accuracy focused on the quality of responses during the
customer service human-computer interaction process, while
friendliness focused on the dialogue coherence during the cus­
tomer service human-computer interaction process. From the
scoring, we can see that the dialogue quality and coherence of
the BIMPM model and the DISAN model have reached a sat­
isfactory level. In contrast to the DISAN and BIMPM model,
the dialogue quality and coherence of the model in this section
have reached a better level of satisfaction.
5. Conclusions
Human’s learning, work, life, as well as other experiences are
held in the brain as associations. These memories can be con­
sidered as individual background knowledge. The process of
interpersonal communication is the process of awakening
locally relevant background knowledge under the impact of
emotional factors. The content recommendation method we
proposed according to the ripple network of knowledge graph
considers the knowledge graph as the robot’s background
knowledge. Then, we extract the potentially interesting enti­
ties of the participants and thoroughly consider the partici­
pants’ subjective emotional friendliness to make the best
decision for the robot dialogue reply. We accomplish this by
simulating the awakening of local associated background
knowledge during the process of human-to-human communi­
cation employing the ripple network. Our suggested model
can successfully enhance the emotional coherence and friend­
liness of robots during HCI, according to comparative testing
data. Our suggested HCI model technique offers valuable
possibilities for the development of a more intelligent and
realistic HCI system, while also simulating real-world humanto-human communication. The knowledge graph ripple net­
work-based HCI model presented in this work in the open
domain interaction system achieves natural and intelligent
interaction. But real conversations are complex and full of
changes. The robot not only needs to have a “brain”, but also
needs to have the rhythm of the conversation. The rhythm of
the conversation is usually maintained jointly by both parties.
How to continue the conversation rhythmically becomes one
of the next research goals.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
Adamopoulou, E., & Moussiades, L. (2020). Chatbots: History, technol­
ogy, and applications. Machine Learning with Applications, 2(53),
100006. https://doi.org/10.1016/j.mlwa.2020.100006
11
Gunther, C. (2019). Tutorial-ChatterBot 1.0. 2 documentation. https://
readthedocs.org/projects/chatterbot/downloads/pdf/stable/
Guo, D., Tur, G., Yih, W., Zweig, G. (2014). Joint semantic utterance
classification and slot filling with recursive neural networks. 2014
IEEE Spoken Language Technology Workshop (SLT) (pp. 554–559).
IEEE.
Hoy, M. B. (2018). Alexa, Siri, Cortana, and more: An introduction to
voice assistants. Medical Reference Services Quarterly, 37(1), 81–88.
https://doi.org/10.1080/02763869.2018.1404391
Irfan, B., Ramachandran, A., Spaulding, S., Glas, D. F., Leite, I., &
Koay, K. L. (2019). Personalization in long-term human-robot inter­
action. 2019 14th ACM/IEEE International Conference on HumanRobot Interaction (HRI) (pp. 685–686). IEEE.
Jeong, M., & Lee, G. G. (2008). Triangular-chain conditional random
fields. IEEE Transactions on Audio, Speech, and Language Processing,
16(7), 1287–1302. https://doi.org/10.1109/TASL.2008.925143
Jokinen, K. (2018). Dialogue models for socially intelligent robots.
Social Robotics: 10th International Conference, ICSR 2018, Qingdao,
China, November 28–30 (pp. 127–138). Springer International
Publishing.
Jokinen, K., & Wilcock, G. (2013). Multimodal open-domain conversa­
tions with the NaoRobot. In Natural interaction with robots, know­
bots and smartphones: Putting spoken dialog systems into practice
(pp. 213–224). Springer Verlag.
Liu, B., & Lane, I. (2017). Iterative policy learning in end-to-end train­
able task-oriented neural dialog models. 2017 IEEE Automatic
Speech Recognition and Understanding Workshop (ASRU) (pp. 482–
489). IEEE. https://doi.org/10.1109/ASRU.2017.8268975
Liu, X., Xie, L., & Wang, Z. (2017). Empathizing with emotional robot
based on cognition reappraisal. China Communications, 14(9), 100–
113. https://doi.org/10.1109/CC.2017.8068769
Lowe, R., Pow, N., Serban, I., Charlin, L., Pineau, J. (2015).
Incorporating unstructured textual knowledge sources into neural
dialogue systems. Neural Information Processing Systems Workshop
on Machine Learning for Spoken Language Understanding (pp. 1–7).
Mikolov, T., Sutskever, I., Chen, K., Corrado, G. S., & Dean, J. (2013).
Distributed representations of words and phrases and their composi­
tionality. Advances in Neural Information Processing Systems, 26,
3111–3119.
Park, J. W., Kim, W. H., Lee, W. H., Kim, J. C., & Chung, M. J. (2011,
December). How to completely use the PAD space for socially inter­
active robots. In 2011 IEEE International Conference on Robotics
and Biomimetics (pp. 3005–3010). IEEE.
Ren, M., Chen, N., & Qiu, H. (2023). Human-machine collaborative
decision-making: An evolutionary roadmap based on cognitive intel­
ligence. International Journal of Social Robotics, 15(7), 1–14. https://
doi.org/10.1007/s12369-023-01020-1
Richmond, J., & Nelson, C. A. (2009). Relational memory during
infancy: Evidence from eye tracking. Developmental Science, 12(4),
549–556. https://doi.org/10.1111/j.1467-7687.2009.00795.x
Rodr�ıguez, L. F., Gutierrez-Garcia, J. O., & Ramos, F. (2016). Modeling
the interaction of emotion and cognition in autonomous agents.
Biologically Inspired Cognitive Architectures, 17, 57–70. https://doi.
org/10.1016/j.bica.2016.07.008
Shackel, B. (1997). Human-computer interaction—Whence and
whither? Journal of the American Society for Information Science,
48(11), 970–986. https://doi.org/10.1002/(SICI)1097-4571(199711)48:
11<970::AID-ASI2>3.0.CO;2-Z
Sil, A., & Yates, A. (2013). Re-ranking for joint named-entity recogni­
tion and linking. The 22nd ACM International Conference on
Information & Knowledge Management (pp. 2369–2374). ACM.
https://doi.org/10.1145/2505515.2505601
Spatola, N., Belletier, C., Chausse, P., Augustinova, M., Normand, A.,
Barra, V., Ferrand, L., & Huguet, P. (2019). Improved cognitive con­
trol in presence of anthropomorphized robots. International Journal
of Social Robotics, 11(3), 463–476. https://doi.org/10.1007/s12369018-00511-w
Su, P. H., Gasic, M., Mrksic, N., Rojas-Barahona, L., Ultes, S.,
Vandyke, D., Wen, T. H., & Young, S. (2016). On-line active reward
12
Z. HE
learning for policy optimisation in spoken dialogue systems. arXiv
preprint arXiv:1605.07669,
Sutskever, I., Vinyals, O., & Le, Q. V. (2014). Sequence to sequence
learning with neural networks. Advances in Neural Information
Processing Systems, 27, 3104–3112.
Wen, T. H., Vandyke, D., Mrksic, N., Gasic, M., Rojas-Barahona,
L. M., Su, P. H., Ultes, S., Young, S. (2016). A network-based endto-end trainable task-oriented dialogue system. arXiv preprint arXiv:
1604.04562,
Xu, P., & Sarikaya, R. (2013). Convolutional neural network based tri­
angular CRF for joint intent detection and slot filling. 2013 IEEE
workshop on automatic speech recognition and understanding (pp.
78–83). IEEE.
Yan, Z., Duan, N., Chen, P., Zhou, M., Zhou, J., Li, Z. (2017). Building
task-oriented dialogue systems for online shopping. Proceedings of
the AAAI Conference on Artificial Intelligence. 31(1): 4618–4625.
https://doi.org/10.1609/aaai.v31i1.11182
Yang, L., Qiu, M., Qu, C., Guo, J., Zhang, Y., Croft, W. B., Huang, J.,
Chen, H. (2018). Response ranking with deep matching networks
and external knowledge in information-seeking conversation sys­
tems. In The 41st International ACMSIGIR Conference on Research
& Development in Information Retrieval (pp. 245–254). https://doi.
org/10.1145/3209978.3210011
Young, T., Cambria, E., Chaturvedi, I., Zhou, H., Biswas, S., & Huang,
M. (2018). Augmenting end-to-end dialogue systems with common­
sense knowledge. Proceedings of the AAAI Conference on Artificial
Intelligence, 32(1), 4970–4977. https://doi.org/10.1609/aaai.v32i1.11923
Zhang, R., Wang, Z., & Mai, D. (2018). Building emotional conversa­
tion systems using multi-task Seq2Seq learning. Natural Language
Processing and Chinese Computing 6th CCF International
Conference, NLPCC 2017, Dalian, China, November 8–12 (pp. 612–
621). Springer International Publishing.
Zhou, H., Huang, M., Zhang, T., Zhu, X., & Liu, B. (2018). Emotional
chatting machine: Emotional conversation generation with internal and
external memory. Proceedings of the AAAI Conference on Artificial
Intelligence, 32(1), 1–9. https://doi.org/10.1609/aaai.v32i1.11325
Zhou, X., & Wang, W. Y. (2017). Mojitalk: Generating emotional
responses at scale. arXiv preprint arXiv:1711.04090,
About the author
Zhu He is a Ph.D. student currently pursuing her degree in UCSI
University – Business and Management program. She is currently
researching how responsible and lovable AI-based agents, both tangible
and intangible, provide values to the business community. Her research
interests are AI in marketing and human-AI interactions.