Short-range SAR imaging with fast adaptive
plug-and-play ADMM-based approach
stationary phase [10], a spherical wave can be revealed as a superposition
of a plane wave:
ZZ
T.H. Pham and I.P. Hong
ej(kx (x−x
ej2kR0 ≈
Fast Fourier transform (FFT) is typically applied to the majority of
recent short-range synthetic aperture radar (SAR) imaging algorithms to
reconstruct the target image, whose quality is particularly sensitive to the
high displayed dynamic range. To tackle this issue, we proposed a SAR
imaging scheme that employs a fast adaptive plug-and-play alternating
direction method of multiples (FA-PnP-ADMM) framework adopting
the state-of-the-art ADMM-based image-solving model. This approach
retains good forcefulness denoising performance at a low signal-to-noise
ratio (SNR) and low sampling ratio (SR) conditions while simultaneously
significantly reducing the computing load. The 2-dimensional (2-D)
imaging simulation results illustrate the superiority of the proposed
scheme compared to those of the existing FFT-based algorithm.
′
)+ky (y−y ′ )+kz z0 )
dkx dky ,
where kx , ky and kz are the components of k in the Cartesian coordinate
system which defer to the following relation:
kz =
q
4k2 − kx2 − ky2 ,
kx2 + ky2 ≤ 4k2 .
(3)
By submitting (2) to (1), the echo signal can be presented as:
ZZ ZZ
s(x, y, k) =
σ(x′ , y ′ )e−j(kx x
′
+ky y ′ )
dx′ dy ′
× ejkz z0 ej(kx x+ky y) dkx dky .
Introduction: As an important remote sensing method, synthetic aperture
radar (SAR) imaging makes use of electromagnetic (EM) waves’ capacity
to create images free from the interference of opaque substances such as
light, clouds, fog, walls, etc. The short-range millimeter-wave (MMW)
technology has drawn a lot of interest lately since it offers better
resolution in both azimuth and range directions than other lower-frequency
bands. As a result, this technology has been used as a useful tool for
several close-range civilian applications, such as medical diagnostics [1],
nondestructive testing (NDT) [2], and security surveillance [3]. The image
reconstruction algorithms need to take into account the important factors
of image reconstruction, namely "speed" and "quality" for these types of
applications. The back-projection algorithm (BPA), which can be applied
to any shape or layout, is a spatial-domain processing method that is widely
used for reconstructing SAR images [4]. However, the computational load
of this technique is substantial since it needs to scan over every point in
the reconstruction area to form an image. The range migration algorithm
(RMA), which is a representation of the fast Fourier transform (FFT),
is another method for recreating SAR pictures. Nevertheless, uniform
sampling during measurement is necessary for the FFT-based approaches
[5]. Although the non-uniform FFT (NUFFT) approach can overcome the
aforementioned problem [6], it is necessary to perform a large amount of
interpolation, resulting in increasing the computational load. Furthermore,
the FFT operation for inverting the target image has a considerable
influence on the image quality in a highly displayed dynamic range.
The alternating direction method of multipliers (ADMM), an
algorithm based on compressed sensing (CS) that exhibits good
convergence performance, has demonstrated its significant promise in
SAR image reconstruction under sparse conditions [7]. However, this
algorithm’s major drawback is that it requires massive amounts of
matrix multiplication and inversion, which significantly increases the
computational burden [8]. An FFT-based function was suggested as an
efficient alternative to high-dimensional matrix operations in order to
tackle this problem and drastically reduce the computation duration [9].
On the basis of this most advanced fast algorithm, we proposed a fast
adaptive plug-and-play ADMM (FA-PnP-ADMM)-based imaging scheme
to accomplish two goals: Initially, determine adaptive regularization
coefficients over each iteration to accelerate the image reconstruction
process. Secondly, robustly forming high-quality images even under
situations with low signal-to-noise ratio (SNR).
Signal model and conventional FFT-based imaging: Assume that the
target is situated at a distance z0 on a target plane (x′ , y ′ , z0 ) and being
scanned by a frequency-modulated continuous wave (FMCW) radar on 2D aperture plane (x, y, 0). The reflected signal s ∈ CNx ×Ny ×Nk can be
defined in the frequency domain as:
ZZ
s(x, y, k) = σ(x′ , y ′ )e(j2kR0 ) dx′ dy ′ ,
(1)
where Nx and Ny are the sampling points over aperture plane in
x- and y -directions, respectively; Nk is number of sampling points
in range direction; σ ∈ CNw ×Nh is the target reflectivity with Nw
and
x′ - and y ′ -directions; R0 =
p Nh are the number of pixel in
2π
2
′
2
′
2
(x − x) + (y − y) + z0 and k = f is the wave number of the beat
b
frequency fb at the corresponding distance R0 . By applying the method of
ELECTRONICS LETTERS
22nd November 2023
(2)
(4)
It is interesting to note that the term inside the square brackets can be
considered as the 2-D Fourier transform of the reflectivity σ which is
denoted as F2D [σ(x′ , y ′ )]. Hence, s(x, y, k) can be rewritten as:
ZZ
s(x, y, k) =
F2D [σ(x′ , y ′ )] × ejkz z0 ej(kx x+ky y) dkx dky
−1
= F2D
F2D σ(x′ , y ′ )ejkz z0
(5)
,
−1
where F2D
[·] represents the inverse 2-D Fourier transform operator.
Consequently, we can infer the target complex reflectivity as:
−1
σ(x′ , y ′ ) = F2D
F2D [s(x, y, k)] × e−jkz z0 .
(6)
Related work: By denoting the s = vec(s) ∈ CNx Ny ×1 and σ = vec(σ )
∈ CNw Nh ×1 as the vectorial forms of the echo data and scattering
coefficients, where the vec(·) is the vectorizing operation, (1) can be
redefined as:
s = Hσ,
(7)
where H ∈ CNx Ny ×Nw Nh is the sensing matrix with element being
e−j2kz0 R0 . It can be seen that the imaging process is correspondingly
the reconstruction of σ from the echo data s. The sparsity allows (7) to be
modeled as linear least-square problem including ℓ1 regularization term as
below:
σ̂ = arg min
σ
1
∥s − Hσ∥22 + λ∥σ∥1 ,
2
(8)
where ∥·∥2 and ∥·∥1 are the ℓ2 (Euclidean) and ℓ1 norms indicating the data
fidelity and the sparsity of targeting signal, respectively, λ is introduced
as a regularization coefficient to control the balance between two terms.
Using ADMM theory [11], an extra auxiliary variable (b) is added to split
the optimization problem into two independent penalty terms:
σ̂ = arg min
σ
1
∥s − Hσ∥22 + λ∥b∥1
2
s.t. σ = b.
(9)
The corresponding augmented Lagrangian (AL) function [11] is expressed
as:
1
2
Lρ (σ, b, u) = ∥s − Hσ∥22 + λ∥b∥1
+ uH (σ − b) +
ρ
∥σ − b∥22 ,
2
(10)
where u stands for the Lagrange multiplier and its conjugate transpose uH ;
ρ is the penalty parameter. As AL function offers all separable variables
in Lρ (σ, b, u), (8) can be solved by decomposing (10) to three iterative
subproblems [11]. However, according to this approach, the large-scale
matrix inversion for calculating σ brings about a high computational
burden, and thus, leads to slow convergence and consumes a large amount
of hardware resources. Wang et al. [9], introduced the fast ADMM
(FADMM) to solve the aforementioned problem by utilizing the relation
between the matrix-representing echo s and reflection coefficient σ . Let’s
Vol. 00
No. 00
(t)
define:
S = s(x, y, kz0 )
and X = σ(x′ , y ′ )
by replacing ∆h(t) and ∆Û with ∆g (t) = B(t) − B(t0 ) and ∆U(t) =
U(t) − U(t0 ) , respectively.
The parameters ρ and γ are then updated based on the following rules:
p
(t−1)
(t−1)
α(t−1) β (t−1) if αcor > ϵcor and βcor > ϵcor
(t−1)
(t−1)
α(t−1)
if αcor > ϵcor and βcor ≤ ϵcor
ρ(t) =
(22)
(t−1)
(t−1)
(t−1)
β
if αcor ≤ ϵcor and βcor > ϵcor
(t−1)
ρ
otherwise,
(11)
(5) and (6) can be correspondingly reformulated as:
−1
S = F {X} ≜ F2D
[F2D [X] ⊗ Φ] ,
−1
X = F† {S} ≜ F2D
F2D [P{S}] ⊗ Φ̄ ,
(12)
where F{·} and F† {·} represent the measurement and imaging processing,
respectively, Φ ∈ CNw ×Nh is the phase matrix and its conjugate Φ̄ with
element being e−jkz z0 , ⊗ denotes the Hadamard product (element-wise
multiplication), and P{·} ∈ CNw ×Nh (Nx < Nw , Ny < Nh ) defines the
zero-padding operation as follow:
(
Nw −Nx
x
≤ i ≤ Nw +N
S , if
2
2
ij
Nh −Ny
Nw +Ny
[P{S}]ij =
(13)
≤j≤
2
2
0,
others.
γ (t) =
√
α(t−1) β (t−1)
1 + 2α(t−1)
+β (t−1)
1.9
1.1
1.5
(t−1)
if αcor
(t−1)
> ϵcor
(t−1)
βcor
(t−1)
βcor
≤ ϵcor
> ϵcor and βcor
(t−1)
αcor
(t−1)
αcor
if
> ϵcor and
if
≤ ϵcor and
otherwise,
> ϵcor
(23)
(t)
where ϵcor is a safeguarding threshold for the curvature estimates; αcor
(t)
and βcor indicate the correlation between relaxed ADMM and relaxed
DRS [13] which are expressed as:
E
D
D
E
(t)
∆h(t) , ∆Û
∆g (t) , ∆U(t)
(t)
(t)
αcor =
(24)
and βcor =
(t)
∥∆g (t) ∥2 ∥∆U(t) ∥2
∥∆h(t) ∥2 ∥∆Û ∥2
The image reconstruction problem is now can be redefined based on (12)
as:
1
2
X̂ = arg min ∥S − F {X}∥22 + λ∥B∥1
X
s.t. X = B,
(14)
and the AL function is accordingly formulated as:
1
2
Lρ (X, B, U) = ∥S − F {X}∥22 + λ∥B∥1
ρ
+ Tr UH (X − B) + ∥X − B∥22 ,
2
The stepsize updating process is performed every 2 iterations and the
safeguarding threshold is fixed at ϵcor = 0.2
(15)
Simulation results: In this section, we validate the effectiveness of the
proposed scheme by simulating SAR images of objects located at a
distance (z0 ) of 200 mm from the aperture plane. Two other algorithms,
namely, RMA and FADMM-ST [9] are used to illustrate the performance
of the proposed scheme employing FA-ADMM-BM3D and FA-ADMMST approaches. The simulated FMCW signal works at a start frequency
of 77 GHz, with a bandwidth of 4 GHz and a slope frequency of 63.343
MHz per second. An echo data cube size of 100 × 100 × 512 is collected.
Then, we randomly select a reduced set of elements in this data cube with
a down-sampling ratio (SR) of 50% for reconstructing a SAR image.
where B and U are the matrix forms of the auxiliary variable (b) and
the dual variable (u), respectively. The Tr{·} stands for the matrix trace
calculation. The problem (14) can be solved by using an iterative method
to update variables in (15) over finite iterations [11]:
1
(t−1)
†
(t) (t−1)
X(t) =
F
{
S
}
+
ρ
B
−
U
(16)
(t)
1+ρ
(t)
= γ (t) X(t) + (1 − γ (t) )B(t−1)
X̃
B(t) = arg min λ∥B∥1 +
B
ρ
(t)
∥B − (X̃ + U(t−1) )∥22
2
(t)
U(t) = U(t−1) + ρ(t) (X̃
− B(t) )
(17)
(18)
(19)
Here, we apply the relaxed ADMM (as in (17)) to improve the convergence
[12], where γ ∈ (0, 2) is the relaxation parameter. Relaxed ADMM
coincides with the original non-relaxed version if γ = 1. It is noteworthy
that the sub-problem (18) is equivalent to a denoiser, and the idea of PnP
ADMM [16] is to plug in a powerful denoising algorithm in place of (18).
In this letter, we employ two denoisers, namely: the shrinkage threshold
(ST) and block-matching and three-dimensional filtering (BM3D).
FA-PnP-ADMM-based approach: It is important to note that the
convergence performance of the ADMM iteration (16)-(19) strongly
depends on the choices of ρ and γ . Hence, in this letter, we studied a
fast adaptive penalty method to automatically tune these parameters over
each iteration, denoted as ρ(t) and γ (t) . By exploiting the relationship
between relaxed ADMM and the relaxed Douglas-Rachford Splitting
(DRS) [13, 14], the adaptive stepsizes of ρ(t) and γ (t) can be derived.
First, two local curvature estimates were defined as α(t) > 0 and β (t) > 0
[15]:
(
(t)
(t)
(t)
αM G
if 2αM G > αSD
(t)
α =
(20)
(t)
(t)
αSD − αM G /2 otherwise,
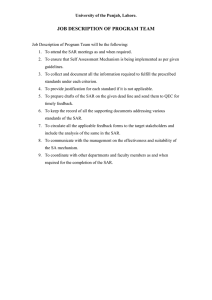
Fig. 1 The convergence performance of the FADMM and the proposed method
First, we evaluate the computational performance of the proposed
scheme and the conventional FADMM-ST by deriving the dual residual
∥X − B∥2 over the iterative process of ADMM [11]. In all ADMM-based
approaches, the tuning parameters of ρ, γ , and λ are initiated as 1, 1.7, and
0.01, respectively [9]. Due to the adaptation of parameters (ρ, γ ) of the
proposed method, the problem can be quickly solved. Fig. 1 illustrates that
our method needs considerably fewer iterations to reach the optimum.
where
D
E
D
E
(t)
(t)
(t )
∆h(t) ,∆Û
X(t) −X(t0 ) ,Û −Û 0
(t)
αM G = ⟨∆h(t) ,∆h(t) ⟩ = X(t) −X(t0 ) ,X(t) −X(t0 )
D
E
D⟨
E⟩
(t)
(t)
(t)
(t ) (t)
(t )
∆Û ,∆Û
Û −Û 0 ,Û −Û 0
(t)
E = D
E
αSD = D (t)
(t)
(t0 )
(t0 ) (t)
(t)
∆h
,∆Û
X
−X
,Û
Table 1: Numerical comparison of different imaging methods
Methods
(21)
RMA
−Û
FADMM-ST
(t)
where Û = U(t−1) + ρ(X(t) − B(t) ) is the intermediate dual variable;
MG and SD stand for minimum gradient and steepest descent, respectively;
⟨a, b⟩ is the inner product of a and b. Similarly, β (t) can be estimated
FA-ADMM
-BM3D
FA-ADMM
-ST
2
Metrics
PSNR (dB)
SSIM
PSNR (dB)
SSIM
PSNR (dB)
SSIM
PSNR (dB)
SSIM
0
17.180
0.856
19.726
0.861
19.725
0.861
19.726
0.861
SR = 0.5, SNR (dB)
10
20
19.424 19.709
0.938
0.947
29.302 36.661
0.973
0.986
29.301 36.660
0.972
0.986
29.302 36.661
0.973
0.986
30
20.474
0.951
39.714
0.987
39.713
0.987
39.714
0.987
Average
time (s)
5.189
0.531
182.88
0.295
improved SSIM and a considerable increase in PSNR. Additionally, at
all SNR levels, FA-ADMM-BM3D performance is slightly worse than
the other ADMM-based methods while the FADMM-ST and FA-ADMMST algorithms archive similar good SSIM and PSNR. Furthermore, the
FA-ADMM-BM3D consumes a large amount of time due to the blockmatching finding nature of BM3D which does not relate to the procedure
of finding adaptive parameters. In contrast, the FA-ADMM-ST approach
has less computational complexity than its counterparts, as a result, it
appreciably consumes less necessary duration to form high-quality images.
Conclusion: This letter proposed the FA-PnP-ADMM-based SAR
imaging scheme to archive high-quality image reconstruction while
considerably reducing computational burden. The performance of the
proposed method is superior to the original fast ADMM as it consumes
fewer iterations to find the optimal solution while retains good image
quality at very low SNR conditions. Moreover, we also validated the
performance of the PnP scheme by integrating different denoisers into
the ADMM problem-solving process. In future work, a novel artificial
intelligence (AI)-based denoising technique will be applied to our imaging
system which is predicted to improve denoising capability.
Acknowledgment: This work has been supported by The IET
J. Smith and A. N. Other (The IET, Stevenage, UK)
E-mail: jsmith@theiet.org
References
1 C. Das, M. Z. Chowdhury and Y. M. Jang,: ‘A Novel Miniaturized mmWave
Antenna Sensor for Breast Tumor Detection and 5G Communication’, IEEE
Access, 2022, 10, pp. 114856-114868
Anderson, P.: ‘A poor man’s derivation of scaling laws for the Kondo
problem’, J. Phys. C., 1960, 3, p. 2436
2 M. A. Abou-Khousa, M. S. U. Rahman, K. M. Donnell and M. T. A.
Qaseer,: ‘Detection of Surface Cracks in Metals Using Microwave and
Millimeter-Wave Nondestructive Testing Techniques—A Review’, IEEE
Trans. Instrum. Meas., 2023, 72, pp. 1-18
3 B. Su and M. Yuan,: ‘Object Recognition for Millimeter Wave MIMO-SAR
Images Based on High-Resolution Feature Recursive Alignment Fusion
Network’, IEEE Sens. J., 2023, 23, (14), pp. 16413-16427
4 D. Feng, D. An and X. Huang,: ‘An Extended Fast Factorized Back
Projection Algorithm for Missile-Borne Bistatic Forward-Looking SAR
Imaging’, IEEE Trans. Aerosp. Electron. Syst., 2018, 54, (6), pp. 2724-2734
5 M. E. Yanik, D. Wang and M. Torlak,: ‘Development and Demonstration
of MIMO-SAR mmWave Imaging Testbeds’, IEEE Access, 2020, 8, pp.
126019-126038
6 J. Wang, P. Aubry and A. Yarovoy,: ‘3-D short-range imaging with irregular
MIMO arrays using NUFFT-based range migration algorithm’, IEEE Trans.
Geosci. Remote Sens., 2020, 58, (7), pp. 4730-4742
7 Moradikia, M., Samadi, S., and Cetin, M.: ‘Joint SAR imaging and multifeature decomposition from 2-D under-sampled data via lowrankness plus
sparsity priors", IEEE Trans. Comput. Imaging, 2018, 5, (1), pp. 1–16
8 B. Zhao, L. Huang and W. Sun,: ‘Target Reconstruction in Deceptively
Jammed SAR via ADMM’, IEEE Sens. J., 2019, 19, (11), pp. 4331-4339
9 M. Wang, S. Wei, Z. Zhou, J. Shi and X. Zhang,: ‘Efficient ADMM
Framework Based on Functional Measurement Model for mmW 3-D SAR
Imaging’, IEEE Trans. Geosci. Remote Sens., 2022, 60, pp. 1-17
10 H. Weyl: ‘Ausbreitung elektromagnetischer Wellen über einem ebenen
Leiter’, Ann. Phys, 1919, 365, (21), pp. 481–500
11 S. Boyd, N. Parikh, E. Chu, B. Peleato, and J. Eckstein,: ‘Distributed
Optimization and Statistical Learning via the Alternating Direction Method
of Multipliers’, 2011
12 J. Eckstein and M. C. Ferris,: ‘Operator-splitting methods for monotone
affine variational inequalities, with a parallel application to optimal control’,
INFORMS J. Comput., 1998, 10, pp. 218–235
13 Z. Xu, M. A. T. Figueiredo, X. Yuan, C. Studer and T. Goldstein,: ‘Adaptive
Relaxed ADMM: Convergence Theory and Practical Implementation’, 2017
Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern. Recognit., 2017, pp.
7234-7243
14 J. Eckstein and D. Bertsekas,: ‘On the Douglas-Rachford splitting method
and the proximal point algorithm for maximal monotone operators’, Math.
Program., 1992, 55, (1-3), pp. 293–318
15 Xu, Zheng, Mario Figueiredo, and Tom Goldstein. ‘Adaptive ADMM with
spectral penalty parameter selection’, Artif. Intell. and Stat. 2017, PMLR,
pp. 718-727
16 R. Hou, F. Li and G. Zhang,: ‘Truncated Residual Based Plug-andPlay ADMM Algorithm for MRI Reconstruction’, IEEE Trans. Comput.
Imaging, 2022, 8, pp. 96-108
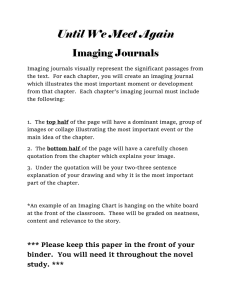
Fig. 2 SAR images of a target reconstructed at four SNR levels by using RMA
(first row) and FA-ADMM-ST (second row)
Fig. 2 demonstrates the SAR images of a scissor exploited from
imaging approaches over four SNR levels, as correspondingly shown in
four columns. The first and second rows in each column of Fig. 2 are
obtained by using the RMA, and FA-ADMM-ST algorithms, respectively.
It is important to mention that the ADMM-based methods have the
same structure, and the SAR images formed by them are similar. The
computational complexity is the only difference between them. Therefore,
only the images archived by FA-ADMM-ST are depicted in this figure, and
it demonstrates that the FA-ADMM-ST has good performance at all SNR
levels with higher contrast and less noise, ghost areas, and distortion.
Furthermore, to quantitatively compare the image quality and the
computational load of the algorithms, two imaging metrics, namely, peak
signal-to-noise ratio (PSNR) and structural similarity index (SSIM); and
computational time are deliberated. The PSNR is the metric to quantify the
reconstructed image quality, whose higher value indicates a better-quality
image, expressed as:
xmax
,
(25)
PSNR(x̂, x) = 20 log10
∥x − x̂∥22
where x denotes the reconstructed image, and x̂ represents the ground truth.
Whilst, SSIM with the highest value of 1, indicates the similarity of the x̂
and x which is defined as:
SSIM(x̂, x) =
(2µx̂ µx + C1 )(2σx̂x + C2 )
,
(µ2x̂ + µ2x + C1 )(σx̂2 + σx2 + C2 )
(26)
where µx̂ , µx , σx̂ and σx are the mean values and standard deviations
of x̂ and x, respectively. C1 and C2 are the constants to stabilize the
division with a weak denominator. Table 1 demonstrates how the ADMMbased algorithms perform better than the traditional RMA as they achieve
3