Structural Analysis Module: Equilibrium, Moments, Reactions
advertisement

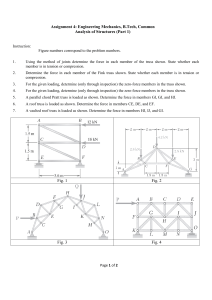
Module 4 Analysis of Structure OVERVIEW In this module, we will apply the concept of equilibrium of force systems in structural analysis of rigid structures. Determinacy and stability will also be discussed. Different types of supports and their corresponding reactions will be taken up. 2D and 3D framing structures will be given focus. LEARNING OUTCOMES After studying this module, you must be able to: • understand and define the moment of a force, • determine moments of a force in 2-D • define a couple, and • determine the moment of a couple • Identify support reactions. • Draw a free body diagram. • Analyse the equilibrium of rigid bodies in two-dimensional problems. INTRODUCTION The moment of a force about a point or an axis provides a measure of the tendency of the force to cause the body to rotate about that point or axis. It is also sometimes called a torque. How is the moment of the force about a point calculated? 1. Draw the line of action of the force: • a co-linear extension of the force vector. • the line of action of F and the point O define the plane above. 2. Draw a moment arm from O perpendicular to line of action. 1|P a g e Moment of the force about O: where d is the perpendicular distance from the point to the line of action of the force Usual sign convention: • impending rotation is CCW (counter-clockwise) about axis then M is positive • impending rotation is CW (clockwise) about axis then M is negative The force F will tend to rotate the object about an axis perpendicular to the plane defined by the force and the moment arm. This axis is referred to as the moment axis. Thus, MO is also referred to as the moment of the force about the axis passing through O. If the line of action of the force passes through the point then there is no moment as d=0 2|P a g e MOMENTS WITH UNKNOWN LEVER ARM 3|P a g e Exercises: 1. What is the moment at A in Figure 16 Figure 16 2. What is the moment at A in Figure 17, if F = 20 kN and θ = 250? Figure 17 3. What is the moment at A in Figure 18? Figure 18 COUPLES A couple is defined as two parallel forces with the same magnitude, but opposite in direction, separated by a perpendicular distance d as shown in Figure 19. The moment of a couple �� = � ∙ � 4|P a g e Couples have zero net force. Since the moment of a couple depends only on the distance between the forces, the moment of a couple is a free vector it can be moved anywhere on the body and have the same external effect on the body. We will calculate the moment at a point in Figure 20, using both the moment of a couple and the sum of the moments from the individual forces. Figure 20 a) Moment of a couple: The parallel forces are 10 kN with a perpendicular distance between them. The moment of the couple is therefore �� = � ∙ � = 10 ∙ 2 = 20 kNm, the moment is turning in an anti-clockwise direction, so is therefore positive in our sign convention. As the moment of a couple is a free vector, the moment at A is also 20 kNm. b) Individual moments: The moment of the force 2.5 m away from A is 0��1 = −(10 × 2.5) = −25 kNm (clockwise) Similarly �2 = 10 × 4.5 = 45 kNm (anti-clockwise) The total moment at A is therefore �� = �1 + �2 = −25 + 45 = 20 kNm Coplanar Distributed Loading A simple distributed loading can be represented by its resultant force, which is equivalent to the area under the loading curve. This resultant has a line of action that passes through the centroid or geometric center of the area or volume under the loading diagram. 5|P a g e EQUILIBRIUM OF A RIGID BODY In contrast to the forces on a particle, the forces on a rigid-body are not usually concurrent and may cause rotation of the body (due to the moments created by the forces). Figure 21 A rigid body subject to a system of forces For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be equal to zero. SOLVING RIGID BODY EQUILIBRIUM PROBLEMS For analyzing an actual physical system, first we need to create an idealized model. Then we need to draw a free-body diagram (FBD) showing all the external (active and reactive) forces. Finally, we need to apply the equations of equilibrium to solve for any unknowns. Examples: 1. Figure 22 shows a concrete beam of length 10 m spanning the gap between two masonry walls. The beam is subject to a 20 kN force 4 m from its left hand edge (for this example the self-weight of the beam will be ignored). What are the forces from the masonry wall that will be required to keep the beam in equilibrium? Figure 22 To analyse the problem the problem in Figure 22, it must be converted to a free body diagram of the beam alone. 6|P a g e Figure 23 Free body diagram Figure 23 shows the beam in isolation subject to both the applied force of 20 kN and the reaction forces that the beam would feel from the masonry walls that it sits upon. We can now apply the equations of equilibrium in order to determine the unknown reactions. We will first sum the forces in the x direction, and impose the constraint that the sum must be equal to zero for equilibrium. In this problem there are no forces acting in the x direction and therefore the horizontal reaction is zero. We will now sum the forces acting in the y direction. The above equation leaves us with 2 unknowns, we will derive a 2nd equation by taking moments about some point along the beam. The choice of where to take moments is completely arbitrary, as the sum of the moments should be zero everywhere for equilibrium, however it is sometimes advantageous to choose a point that eliminates one of the unknowns immediately. If we were to take moments 4 m along the beam, we would get another equation relating RAY to RBY, which we could then substitute into the equation above and solve for one of the reactions. A more direct way would be to take moments about either of the ends, A or B, or the beam. Taking moments about the left hand end (A), yields RBY x 10 - 20 x 4 = 0 Hence RBY = 8 kN With ��� known we can now substitute this value into our equation for equilibrium in the � direction to obtain ��y? RAY + 8 - 20 = 0 RAY = 12 kN 2. A 10 m beam is now embedded into a wall at its left hand end, as shown in Figure 24. Figure 24 7|P a g e What are the support reactions required at the left hand end, in order for the beam to remain in equilibrium? We again begin the solution process by drawing a free body diagram (FBD) of the beam in isolation from its surroundings. Figure 25 Free body diagram As the beam is embedded in the wall, we assume that the wall is able to impose a moment MA on the left hand end of the beam, in addition to a horizontal reaction RAX and vertical reaction RAY. We can now use the three equations of equilibrium in 2D to compute the unknown reactions. By inspection, we can immediately see that the horizontal reaction RAX is zero, as no other horizontal loads are acting on the beam. Summing the forces in the y direction Thus RAX = 0 RAY − 20 = 0 RAY = 20 kN In order to find the reaction moment, we take moments about the left hand end MA − 20 × 10 = 0 Thus MA = 200 kN.m The moment is given a positive sign as it must act in a counter-clockwise direction. 3. Given the rigid body in Figure 26, if P1 = 12 kN and P2 = 8 kN and the distances a = 2 m, b = 3 m and c = 4 m. Find the vertical reactions RAY and RBY required to support the beam. Figure 26 Supports for Rigid Bodies Subjected to Two-Dimensional Force Systems 8|P a g e 9|P a g e LESSON 2: CONDITIONS FOR EQUILIBRIUM OF PARALLEL FORCES The sum of all the forces is zero. ΣF=0 The sum of moment at any point O is zero. ΣMO=0 SAMPLE PROBLEMS 1. Determine the reactions for the beam shown. 100 lb/ft Solution: Σ��2 = 0 10R1+4(400) =16(300) +9[14(100)] R1=1580 lb answer Σ��1 = 0 10R2+6(300)=14(400)+1[14(100)] R2=520 lb answer 2. The roof truss shown is supported by a roller at A and a hinge at B. Find the values of the reactions. 10 | P a g e Replace the 3-20 kN and 2-10 kN forces by a single 80 kN force ΣMB=0 15RA = 10(60) + 7.5(80) + 5(50) RA = 96.67 kN answer ΣMA=0 15RB = 5(60) + 7.5(80) + 10(50) RB = 93.33 kN answer PROBLEM EXERCISES 1. Determine the reactions for the beam shown. 200 lb 200 lb 350 lb 2. Determine the reactions for the beam loaded as shown. 15 kN 20 kN/m 3. The cantilever beam shown in the Figure is built into a wall 2 ft thick so that it rests against points A and B. The beam is 15 ft long and weighs 100 lb per ft. 11 | P a g e 5000 lb 15 ft A 4. The upper beam in Figure shown is supported at D and a roller at C which separates the upper and lower beams. Determine the values of the reactions at A, B, C, and D. Neglect the weight of the beams. 80 kN 150 kN 300 kN 5. For the system of pulleys shown below, determine the ratio of W to P to maintain equilibrium. Neglect axle friction and the weights of the pulleys. LESSON 3: EQUILIBRIUM OF NON-CONCURRENT FORCE SYSTEM (COPLANAR FORCE SYSTEMS) There are three equilibrium conditions that can be used for nonconcurrent, non-parallel force system. The sum of all forces in the x-direction or horizontal is zero. ΣFx=0 or ΣFH=0 The sum of all forces in the y-direction or vertical is zero. ΣFy=0 or ΣFV=0 The sum of moment at any point O is zero. ΣMO=0 The three equilibrium conditions can solved up to three unknowns in the system. SAMPLE PROBLEMS 1. The frame shown below is supported in pivots at A and B. Each member weighs 5 kN/m. Compute the horizontal reaction at A and the horizontal and vertical components of the reaction at B. 12 | P a g e Solution: Length of DF LDF = 42 + 32 = 5 m Weights of members WAB=6(5)=30 kN WCE=6(5)=30 kN WDF=5(5)=25 kN ΣMB=0 6AH=3WCE+2WDF+6(200) 6AH=3(30)+2(25)+6(200) AH=223.33 kN ΣFH = 0 BH=AH BH=223.33 kN answer ΣFV=0 BV=WAB+WCE+WDF+200 BV=30+30+25+200 BV=285 kN answer 2.Compute the total reactions at A and B on the truss shown. 3. The beam shown is supported by a hinge at A and a roller on a 1 to 2 slope at B. Determine the resultant reactions at A and B. 13 | P a g e PROBLEM EXERCISES 1. A boom AB is supported in a horizontal position by a hinge A and a cable which runs from C over a small pulley at D as shown in the figure. Compute the tension T in the cable and the horizontal and vertical components of the reaction at A. Neglect the size of the pulley at D. 2. Repeat problem #1 if the cable pulls the boom AB into a position at which it is inclines at 30° above the horizontal. The loads remain vertical. 3. The truss shown in the figure is supported on roller at A and hinge at B. Solve for the components of the reactions. 7. The uniform rod in Fig. P-357 4. Compute the total reactions at A and B for the truss shown. 6. The forces acting on a 1-m length of a dam are shown in the figure below. The upward ground reaction varies uniformly from an intensity of p1 kN/m to p2 kN/m at B. Determine p1 and p2 and also the horizontal resistance to sliding. weighs 420 lb and has its center of gravity at G. Determine the tension in the cable and the reactions at the smooth surfaces at A and B. 8. A bar AE is in equilibrium under the action of the five forces shown in Fig. P-358. Determine P, R, and T. 14 | P a g e 9. A 4-m bar of negligible weight rests in a horizontal position on the smooth planes shown. Compute the distance x at which load T = 10 kN should be placed from point B to keep the bar horizontal. LESSON 4: SIMPLE TRUSSES A truss is a structure composed of slender members joined together at their end points. The members commonly used in construction consist of wooden struts or metal bars. In particular, planar trusses lie in a single plane and are often used to support roofs and bridges. The truss shown in Fig. 6-1a is an example of a typical roof-supporting truss. In this figure, the roof load is transmitted to the truss at joints by means of a series of purlins. Since this loading acts in the same plane as the truss, Fig. 6-1b, the analysis of the forces developed in the truss members will be two-dimensional. 15 | P a g e In the case of a bridge, such as shown in Fig. 6-2a, the load on the deck is first transmitted to stringers, then to floor beams, and finally to the joints of the supporting side trusses. Like the roof truss, the bridge truss loading is also coplanar, Fig. 6-2b. When bridge or roof trusses extend over large distances, a rocker or roller is commonly used for supporting one end, for example, joint A in Fig. 61a and 6-2a. This type of support allows freedom for expansion or contraction of the members due to a change in temperature or application of loads. Assumption for Design To design both the members and the connections of a truss, it is necessary first to determine the force developed in each member when the truss is subjected to a given loading. To do this we will make two important assumptions: All loadings are applied at the joints. In most situations, such as for bridge and roof trusses, this assumption is true. Frequently the weight of the members is neglected because the force supported by each member is usually mush larger than its weight. However, if the weight is to be included 16 | P a g e in the analysis, it is generally satisfactory to apply it as a vertical force, with half of its magnitude applied at each end of the member. The members are joined together by smooth pins. The joint connections are usually formed by bolting or welding the ends of the members to a common plate, called a gusset plate, as shown in Fig. 6-3a, or by simply passing a large bolt or pin through each of the members, Fig. 6-3b. We can assume these connections act as pins provided the center lines of the joining members are concurrent, as in Fig. 6-3. Because of these two assumptions, each truss member will act as a two force member, and therefore the force acting at each end of the member will be directed along the axis of the member. If the force tends to elongate the member, it is a tensile force (T), Fig. 6-4a; whereas if it tends to shorten the member, it is a compressive force (C), Fig. 6-4b. In the actual design of a truss it is important to state whether the nature of the force is tensile or compressive. Often, compression members must be made thicker than tension members because of the buckling or column effect that occurs when a member is in compression. 17 | P a g e Simple Truss. If three members are pin connected at their ends they form a triangular truss that will be rigid, Fig. 6-5. Attaching two or more members and connecting these members to a new joint D forms a larger truss, Fig.6-6. This procedure can be repeated as many times as desired to form an even larger truss. If a truss can be constructed by expanding the basic triangular truss in this way, it is called a simple truss. A LESSON 5: THE METHOD OF JOINTS This method is based on the fact that if the entire truss is in equilibrium, then each of its joints is also in equilibrium. Therefore, if the free-body diagram of each joint is drawn, the force equilibrium equations can then be used to obtain the member forces acting on each joint. Since the members of a plane truss are straight two-force members lying in a single plane, each joint is subjected to a force system that is coplanar and concurrent. As a result, only ΣFx = 0 and ΣFy = 0 needed to be satisfied for equilibrium. For example, consider the pin at joint B of the truss in Fig. 6-7a. Three forces act on the pin, namely, the 500-N force and the forces exerted by members BA and BC. The free-body diagram of the pin is shown in Fig. 6-7b. Here, FBA is “pulling” on the pin, which means that the member BA is in tension; whereas FBC is “pushing” on the pin, and consequently member BC is in compression. These effects are clearly demonstrated by isolating the joint with small segments of the member connected to the pin, Fig. 6-7c. The pushing or pulling on these small segments indicates the effect of the member being either in compression or tension 18 | P a g e When using the method of joints, always start at a joint having at least one known force and at most two unknown forces, as in Fig. 6-7b. In this way, application of ΣFx = 0 and ΣFy = 0 yields two algebraic equations which can be solved for the two unknowns. When applying these equations, the correct sense of an unknown member force can be determined using one of two possible methods. The correct sense of direction of an unknown member force can, in many cases, be determined “by inspection.” For example, FBC in Fig. 6-7b must push on the pin (compression) since its horizontal component, FBC sin 45°, must balance the 500-N force (ΣFx = 0). Likewise, FBA is a tensile force since it balances the vertical component, FBC cos 45° (ΣFy = 0). In more complicated cases, the sense of an unknown member force can be assumed; then, after applying the equilibrium equations, the assumed sense can be verified from the numerical results. A positive answer indicates that the sense is correct, whereas a negative answer indicates that the sense shown on the free-body diagram must be reversed. Always assume the unknown member forces acting on the joint’s free-body diagram to be in tension; i.e., the forces “pull” on the pin. If this is done, then numerical solution of the equilibrium equations will yield positive scalars for members in tension and negative scalars for members in compression, once an unknown member force is found, use its correct magnitude and sense (T or C) on subsequent joint free-body diagrams. Procedure for Analysis The following procedure provides a means for analyzing a truss using the method of joints. Draw the free-body diagram of a joint having at least one known force and at most two unknown forces. (If this joint is at one of the supports, then it may be necessary first to calculate the external reactions at the support.) 19 | P a g e Use one of the two methods described above for establishing the sense of an unknown force. Orient the x and y axes such that the forces on the free-body diagram can be easily resolved into their x and y components and then apply the two force equilibrium equations ΣFx = 0 and ΣFy = 0. Solve for the two unknown member forces and verify their correct sense. Using the calculated results, continue to analyze each of the other joints. Remember that a member in compression “pushes” on the joint and a member in tension “pulls” on the joint. Also, be sure to choose a joint having at most two unknowns and at least one known force. SAMPLE PROBLEM 1. Determine the force in each member of the truss shown in Fig. 6-8a and indicate whether the members are in tension or compression. Fig. 6-8a Solution: Since we should have no more than two unknown forces at the joint and at least one known force acting there, we will begin our analysis at joint B. FBD of Joint B 20 | P a g e Fig. 6-8b Joint B. The free body diagram of the joint at B is shown in Fig. 6-8b, Applying the equations of equilibrium, we have Since the force in member BC has been calculated, we can proceed to analyze joint C to determine the force in member CA and the support reaction at the rocker. FBD of Joint C Fig. 6-8c Joint C. From free-body diagram of joint C, Fig. 6-8c, we have FBD of Joint A Fig. 6-8d Joint A. Although it is not necessary, we can determine the components of the support reactions at joint A using the results of FCA and FBA. From the free-body diagram, Fig. 6-8d, we have 21 | P a g e Therefore, we have: Note: The results of the analysis are summarized in Fig. 6-8e. Note that the free-body diagram of each joint (or pin) shows the effects of all the connected members and external forces applied to the joint, whereas the free-body diagram of each member shows only the effects of the end joints on the member. 2. Determine the force in each member of the truss shown in Fig. 6-9a and indicate whether the members are in tension or compression. Solution: Since joint C has one unknown and only two unknown forces acting on it, it is possible to start at this joint, then analyze joint D, and finally joint A. This way the support reactions will not have to be determined prior to starting the analysis. FBD of Joint C 22 | P a g e Fig. 6-9b Joint C. By inspection of the force equilibrium, Fig 6-9b, it can be seen that both members BC and CD must be in compression. FBD of Joint D Fig. 6-9c Joint D. Using the result FCD = 400N (C), the force in members BD and AD can be found by analyzing the equilibrium on joint D. We will assume FAD and FBD are both tensile forces or you can use inspection to determine the correct direction of these forces, Fig 6-9c. ΣFy = 0; ΣFx = 0; - FBD 2 25 - FAD cos 45° = 0 FBD 24 5 + FAD sin 45° - 400 = 0 FBD 24 5 + FAD sin 45° = 400 Using your calculator, input the coefficients of the two (2) equations. FBD = 894.43 N (T) FAD = -565.69 N = 565.69 (C) FBD of Joint A 23 | P a g e Fig. 6-9d Joint A. The force in member AB can be found by analyzing the equilibrium of joint A. Fig 6-9d. We have ΣFx = 0; (565.69) cos 45° - FAB = 0 FAB = 400 N (C) Zero-Force Members Truss analysis using the method of joints is greatly simplified if we can first identify those members which support no loading. These zero-force members are used to increase the stability of the truss during construction and to provide added support if the loading is changed. The zero-force members of the truss can generally be found by inspection of each of the joints. For example, consider the truss shown in Fig. 6-11a. If a free-body diagram of the pin at joint A is drawn, Fig. 6-11b, it is seen that members AB and AF are zero-force members. (We could not have come to this conclusion if we have considered the free-body diagrams of joints F and B simply because there are five unknowns at each joint.) In similar manner, consider the free-body diagram of joint D, Fig 6-11c. Here again it is seen that DC and DE are zero-force members. From these observations, we can conclude that if only two members form a truss joint and no external load or support reaction is applied to the joint, the two members must be zero-force members. The load in the in Fig 6-11a is therefore supported by only five members as shown in Fig. 6-11d. Now consider the truss shown in Fig. 6-12a. The free-body diagram of the pin at joint D is shown in Fig. 6-12b. By orienting the y axis along members DC and DE and the x axis along member DA, it is seen that DA is a 24 | P a g e zero-force member. Note that this is also the case for member CA, Fig. 6-12c. In general, if three members form a truss joint for which two of the members are collinear, the third member is a zero-force member provided no external force or support reaction is applied to the joint. The truss shown in Fig. 6-12d is therefore suitable for supporting the load P. PROBLEM EXERCISES 1. Determine the force in each member of the truss shown and state if the members are in tension or compression. 25 | P a g e 2. Determine the force in each member of the truss, and state if the members are in tension or compression. Set P = 800lb. 3. Determine the force in each member of the truss and state if the members are in tension or compression. The load has a mass of 40 kg. 4. Determine the force in each member of the truss in terms of the load P, and indicate whether the members are in tension or compression. LESSON 6: THE METHOD OF SECTIONS 26 | P a g e When we need to find the force in only a few members of a truss, we can analyze the truss using the method of section. It is based on principle that if the truss is in equilibrium then any segment of the truss is also in equilibrium. In the method of sections, a truss is divided into two parts by taking an imaginary “cut” (shown here as a-a) through the truss. Since truss members are subjected to only tensile or compressive forces along their length, the internal forces at the cut member will also be either tensile or compressive with the same magnitude. This result is based on the equilibrium principle and Newton’s third law. Procedure for Analysis: The process used in the method of sections is outlined below: 1. In the beginning it is usually useful to label the members in your truss. This will help you keep everything organized and consistent in later analysis. In this book, the members will be labeled with letters. 27 | P a g e 2. Treating the entire truss structure as a rigid body, draw a free body diagram, write out the equilibrium equations, and solve for the external reacting forces acting on the truss structure. This analysis should not differ from the analysis of a single rigid body. 3. Next you will imagine cutting your truss into two separate sections. The cut should travel through the member that you are trying to solve for the forces in, and should cut through as few members as possible (The cut does not need to be a straight line). 4. Next you will draw a free body diagram for either one, or both sections that you created. Be sure to include all the forces acting on each section. Any external reaction or load forces that may be acting at the section. An internal force in each member that was cut when splitting the truss into sections. Remember that for a two force member, the force will be acting along the line between the two connection points on the member. We will also need to guess if it will be a tensile or a compressive force. An incorrect guess now though will simply lead to a negative solution later on. A common strategy then is to assume all forces are tensile, then later in the solution any positive forces will be tensile forces and any negative forces will be compressive forces. Label each force in the diagram. Include any known magnitudes and directions and provide variable names for each unknown. 28 | P a g e 5. Write out the equilibrium equations for each section you drew a free body diagram of. These will be extended bodies, so you will need to write out the force and the moment equations. For 2D problems you will have three possible equations for each section, two force equations and one moment equation. For 3D problems you will have six possible equations for each section, three force equations and three moment equations. 6. Finally, solve the equilibrium equations for the unknowns. You can do this algebraically, solving for one variable at a time, or you can use matrix equations to solve for everything at once. If you assumed that all forces were tensile earlier, remember that negative answers indicate compressive forces in the members. SAMPLE PROBLEMS 29 | P a g e 1. Determine the force in member CF of the truss show in Fig. 6-17a. Indicate whether the member is in tension or compression. Assume each member is pin connected. Solution: Fig 6-17a Free-Body Diagram. Section aa in Fig. 6-17a will be used since this section will “expose” the internal force in member CF as “external” on the free-body diagram of either the right or left portion of the truss. It is first necessary, however, to determine the support reactions on either the left or right side. Verify the results shown on the free-body diagram in Fig. 6-17b Fig. 6-17b The free-body diagram of the right portion of the truss, which is the easiest to analyze, is shown in Fig. 6-17c. There are three unknowns, FFG, FCF, and FCD. Fig. 6-17c Equations of Equilibrium. We will apply the moment equation about point O in order to eliminate the two unknowns FFG and FCD. The location of 30 | P a g e point O measured from E can be determined from proportional triangles, i.e., 4/(4 + x) = 6/8 + x), x = 4m. or stated in another manner, the slope of member GF has a drop of 2 m to a horizontal distance of 4 m, Fig. 6-17c, then from D to O the distance must be 8 m. An easy way to determine the moment of FCF about point O is to use the principle of transmissibility and slide FCF to point C, and then resolve FCF into its two rectangular components, We have 2. Determine the force in member EB of the roof truss show in Fig. 6-18a. Indicate whether the member is in tension or compression. Fig. 6-18a Solution: Free-Body Diagram. By the method of sections, any imaginary section that cuts through EB, Fig. 6-18a, will also have to cut through three other members for which the forces are unknown. For example, section aa cuts through ED, EB, FB, and AB. If a free-body diagram of the left side of this section is considered, Fig. 6-18b, it is possible to obtain FED by summing moments about B to eliminate the other three unknowns; however, FEB cannot be determined from the remaining two equilibrium equations. One possible way of obtaining FEB is first to determine FEB is first to determine FED from section aa, then use this result on section bb, Fig 6-18a, which is shown in Fig 6-18a, which is shown in Fig. 6-18c. Here the force system is concurrent and our sectioned free-body diagram is the same as the free-body diagram for the joint at E. Fig. 6-18b 31 | P a g e Fig. 6-18c Equations of Equilibrium. In order to determine the moment of FED about point B, Fig 6-18b, we will use the principle of transmissibility and slide the force to point C and then resolve it into its rectangular components as shown. Therefore, Considering now the free-body diagram of section bb, Fig 6-18c, we have PROBLEM EXERCISES 1. Determine the force in each members KJ, KD, and CD of the Pratt truss. State if the members are in tension or compression. 2. Determine the force in members EF, CF, and BC of the truss. State if the members are in tension or compression. 32 | P a g e 3. Determine the force in members DC, HI, and JI of the truss. State if members are in tension or compression. 4. Determine the force in members JK, CJ, and CD of the truss, and state if the members are in tension or compression. 5. Determine the force in members HI, FI, and EF of the truss, and state if the members are in tension. Problem 4 & 5 33 | P a g e LESSON 7: FRAMES AND MACHINES Frames and machines are two types of structure which are often composed of pin-connected multiforce members, i.e., members that are subjected to more than two forces. Frames are used to support loads, whereas machines contain moving parts and are designed to transmit and alter effect of forces. Provided a frame or machine contains no more supports or members than are necessary to prevent its collapse, the forces acting at the joints and supports can be determined by applying the equations of equilibrium to each of its members. Once these forces are obtained, it is then possible to design the size of the members, connections, and supports using the theory of mechanics of materials and an appropriate engineering design code. Free-Body Diagrams. In order to determine the forces acting at the joints and supports of a frame or machine, the structure must be disassembled and the free-body diagrams of its parts must be drawn. The following important points must be observed: Isolate each part by drawing its outlined shape. Then show all the forces and/or couple moments that act on the part. Make sure to label or identify each known and unknown force and couple moment with reference to an established x, y coordinate system. Also, indicate any dimensions used for taking moments. Most often the equations of equilibrium are easier to apply if the forces are represented by their rectangular components. As usual, the sense of an unknown force or couple moment can be assumed. Identify all two-force members in the structure and represent their free-body diagrams as having two equal but opposite collinear forces acting at their points of application. By recognizing the twoforce members, we can avoid solving an unnecessary number of equilibrium equations. Forces common to any two contacting members act with equal magnitudes but opposite sense on the representative members. If the two members are treated as a “system” of connected members, then these forces are “internal” and are shown on the free-body diagram of the system; however, if the free-body diagram of each member is drawn, the forces are “external” and must be shown on each of the free-body diagrams. The following examples graphically illustrate how to draw the free-body diagrams of a disassembled frame or machine. In all cases, the weight of the members is neglected. 34 | P a g e Sample Problems 1. For the frame shown in Fig. 6-21a, draw the free-body diagram of (a) each member, (b) the pin at B, and (c) the two members connected together. Fig. 6-21a Solution: Part (a). By inspection, members BA and BC are not two-force members. Instead, as shown on the free-body diagram, Fig. 6-21b BC is subjected to a force from the pins at B and C and the external couple moment M. The pin forces are represented by their x and y components. Fig. 6-12b Part (b). The pin at B is subjected to two forces, i.e., the force of member BC and the force of member AB. For equilibrium these forces or their respective components must be equal but opposite, Fig. 6-21c. Realize that Newton’s third law is applied between the pin and its connected members, i.e., the effect of the pin on the two members, Fig. 6-21b, and the equal but opposite effect of the two members on the pin. Fig. 6-21c. 35 | P a g e Fig. 6-12c Part (c). The free-body diagram of both members connected together, yet removed from the supporting pins at A and C, is shown in Fig. 6-12d. The force components Bx and By are not shown on this diagram since they are internal forces (Fig. 6-21b) and therefore cancel out. Also, to be consistent when later applying the equilibrium equations, the unknown force components at A and C must act in the same sense as those shown in Fig 6-21b. Fig. 6-21d 2. Determine the horizontal and vertical components of force which the pin at C exerts on members BC of the frame in Fig. 6-26a. Fig. 6-26a 36 | P a g e Solution I: FBD: By inspection it can be seen that AB is a two-force member. The freebody diagrams are shown in Fig. 6-26b. Fig 6-26b Equations of Equilibrium: The three unknowns can be determined by applying the three equations of equilibrium to member CB. Solution II: FBD: If one does not recognize the AB is a two-force member, then more work is involved in solving this problem. The free-body diagrams are shown in Fig 6-26c. Fig. 6-26c 37 | P a g e Equations of Equilibrium. The six unknowns are determined by applying the three equations of equilibrium to each member. Member AB Member BC The result for Cx and Cy can be determined by solving these equations in following sequence: 4, 1, 5, then 6. The results are By = 1000 N Bx = 577 N Cx = 577 N Cy = 1000 N By comparison, Solution I is simpler since the requirement that FAB in Fig. 6-26b be equal, opposite, and collinear at the ends of member AB automatically satisfies Eqs. 1, 2, and 3 above and therefore eliminates the need to write these equations. As a result, save yourself some time and effort by always identifying the two-force members before starting the analysis. Assigned Readings: Read your reference books in Engineering Mechanics Statics, Chapter 6. Solve more similar problems from the exercises given above. Suggested Readings: You can also try to access the internet, aside from your reference books. You can access and watch you tube, just search for our topic and you will see videos of professors discussing about these topics that we have undertaken in this module. References: Hibbeler, R.C., Engineering Mechanics, Statics, 14th Edition, 2016 Khurmi, R.S., A Textbook of Engineering Mechanics Singer, Ferdinand L., Engineering Mechanics, Statics and Dynamics, 3rd Edition 38 | P a g e