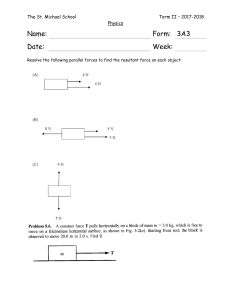
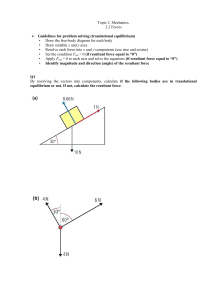
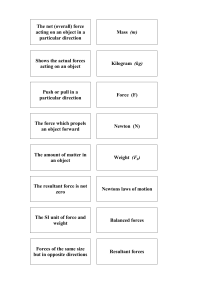
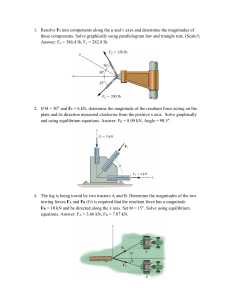
APPLIED MECHANICS – GEC 214 Prepared by Prof. O. O. Ajayi Department of Mechanical Engineering, Covenant University, Ota, Ogun State, Nigeria I. PRINCIPLES OF MECHANICS I.1 DEFINITION AND CONCEPT Mechanics can be defined as the branch of physical science which studies the behaviour of a body at rest or in motion under the action of forces. It is basic to Engineering Sciences because of its use in the analysis and design of engineering components and systems. A thorough knowledge of mechanics is a foundation tool for the understanding of the physical phenomenon of engineering. I.2 BRANCHES OF MECHANICS Mechanics is a branch of physical sciences which is divided into three parts, namely: (i) Fluid Mechanics; (ii) Mechanics of Deformable Bodies and (iii) Solid Mechanics. Fluid Mechanics: This is the part of mechanics which deals with the behaviour of liquids and gases under the action of balanced and unbalanced forces. It could be statics or dynamics. A sub division of fluid mechanics include: Compressible fluid mechanics and incompressible fluid mechanics. Mechanics of Deformable bodies: This is the part of mechanics commonly referred to as ‘STRENGTH OF MATERIALS’. It studies the reaction of bodies to external forces i.e. it looks into the resulting stress and/or deformation that arise as a result of application of external loads (or forces). It is intermediate between fluid mechanics and solid mechanics. Solid Mechanics: In this part of mechanics, the bodies are assumed to be rigid solids. Although, in practical phenomenon, they are not actually absolute solids; they deform under the compressible or tensile loads (or forces) to which they are subjected. These deformations are however very small and do not cause problems to the conditions of equilibrium of such bodies. A solid (or rigid) body can therefore be defined as that in which the distance between any two points in the body remains ‘appreciably’ unchanged. Sub division of solid mechanics This include: (i) Statics and (ii) Dynamics. Statics is the study of the behaviour of bodies at rest under the action of balanced forces; while dynamics is the study of the bahaviours of bodies in motion under the action of unbalanced forces. The emphasis in this course shall be on solid mechanics. BASIC CONCEPTS The basic concepts of mechanics are the concepts of time space mass and force. Concept of time: This answers the question ‘when’. It gives the precise definition of when an event takes place or will take place. Concept of space: This answers the question ‘where. It gives the definition of the position. This definition arises from the frame of reference that all point are defined from an imaginary origin measured out in three direction called xyz axes. Concept of mass: This answers the question ‘how much’ It gives the measure of quantity of a body involved.e.g. 2kg of a body is placed on a tower. Concept of force: This answers the question ‘what is the cause’ It defines what causes an action to take place. 2.0 FORCE Force is generally defined as ‘any effect or action’ that may cause a change in the state of rest or motion of a body. It could be direct or indirect (i.e. at a distance). 2.1 KINDS OF FORCES 1. Contact Forces: These are forces which are in direct contact with a body on which they act e.g. force of push or pull and friction. 2 2. Force Fields: these are forces that act on a body from a distance. It can be gravitational, electrical or magnetic in nature. These forces have a space of action around them where any body brought into such space feels the effect of the force creating the field. 2.2 PROPERTIES OF FORCES For adequate description of a force, it must have three basic properties: (i) Magnitude: This is the size of the force represented by a number with a unit e.g. 10N, 50N. (ii) Direction: This is the line of action to which the force is acting (or the effect of the force can be felt) e.g. 10N North 45o South. Diagrammatically it is shown by a line with an arrow head pointing in the line of action. (iii) Point of Action: This is the point on a body on which the force is acting. X 10N A force of 10N, acting on a body at point X in the direction of the east. 2.3 TYPES OF FORCES (1) Distributed Force: This is a force whose effect on a body is spread over many areas of the body e.g. the weight of a beam. (2) Concentrated Force: This is a force whose effect on a body is felt on very small area compared to the entire surface area of the body. Other types of forces include external force and internal force. 2.4 FORCE CONFIGURATION Forces whose lines of action lie on the same plane are called coplanar forces. Spatial or space forces have their lines of action lying in three dimensional space. Concurrent forces have their lines of action passing through a common point, while for non concurrent forces, the lines of action pass through different points. The following configurations are obtainable: (i) concurrent coplanar (ii) Non concurrent coplanar and (iii) Spatial; concurrent and non concurrent. 3 2.5 LAWS OF SOLID MECHANICS Owing to the contribution of Sir Isaac Newton to science, Newtonian mechanics still remains the basis of engineering sciences. This gives rise to what is called NEWTON’S LAWS. These laws govern the behaviours of bodies under the action of forces. (1) ‘Newton’s’ First Law: States that a particle will remain at rest (if originally at rest) or continues to move (if originally in motion) in a straight line with uniform velocity if no force is acting on it.. N.B: The concept of ‘NO’ force can actually mean the resultant force is zero. (2) ‘Newton’s’ Second Law: States that if the resultant force acting on a particle is not zero; the rate of change of velocity with time is directly proportionally to the resultant force, and takes place in the direction of the force. Mathematically; Fα v t But v = a where a = acceleration. t Thus; where F = force, V = velocity and t = time Fα a Applying the principles of proportionality and dimensionality; F = ma where m = constant of proportionality called mass. Hence, m = mass of the particle. (3) ‘Newton’s’ Third Law: States that the force acting on a body produces a reaction which is equal in magnitude and opposite in direction. 4 (4) ‘Newton’s Law of Gravitation: States that two bodies of masses M and m attract each other with a force that is directly proportional to the product of their masses and inversely proportional to the square of their distance apart. Mathematically; Fα Mm r2 where F = force of attraction btw bodies, M and m are masses of the bodies and r2 is the square of their distance apart. F= Mm r2 G = constant of proportionality called Universal constant or gravitation constant. (5) The parallelogram law for addition of forces: states that if two forces acting on a body can be represented by the two sides of a parallelogram, then the resultant can be represented by the diagonal of the parallelogram in magnitude and direction. Diagrammatically; (6) Principle of Transmissibility: States that if the point of action of a force is shifted from one point to the other on the same line of action, it will produce no different effect provided the magnitude and direction are retained. 3.0 RESULTANT OF COPLANAR FORCE SYSTEM The Resultant of forces simply implies a single force that gives the same effect in magnitude and direction, as the effect of two or more forces acting together simultaneously on an element. Another name for resultant of a force system is ‘ EQUIVALENT FORCE’: the equivalent force is the vector sum of the individual forces. 5 3.1 RESULTANT OF CONCURRENT FORCES. PRINCIPLES The resultant of concurrent coplanar forces can carried out using any of (i) Parallelogram Law of Forces described earlier, (ii) Triangle Law of Forces and (iii) Polygon Rule. Triangle Law of Forces This law sates that ‘if two forces acting on a body can be represented by the sides of a triangle; then the third side drawn into size can represent the resultant in magnitude and direction.’ For example , consider the figure below acted upon by two forces X and Y. X Y If forces X and Y can be represented by the sides of a rectangle in magnitude and direction, the third side will represent the resultant (sum of X and Y) in magnitude and direction. Hence, Triangle law of forces like the parallelogram law of forces is used to find the resultant of two coplanar forces Y X+Y R X Polygon Law of forces This law states that ‘if three or more forces can be used to represent (in magnitude and direction) the sides of a regular polygon; then the line which is drawn to complete the polygon represents the resultant in magnitude and direction.’ For example: consider the body below, acted upon by the system of coplanar forces 6 X Y M X Z If the forces X, Y, Z and M can be used to represent the sides of a polygon, then the line which is drawn to close up the polygon will represent the resultant (sum of X, Y, Z, and M). From the solution of the figure above, it is clear that, in application, polygon of forces is obtained by drawing the forces (tip to base) starting from a particular force and maintaining the respective orientation of the forces. The last side that would close the polygon is the resultant R. METHODS OF SOLUTION 1. Graphical method of solution: This method makes use of the three laws explained above. It is carried out by graphically drawing the forces in magnitude and direction using a properly chosen line scale. The direction of each force is measured using a protractor. The closing side of the figure represents the resultant. 2. The trigonometric method: This method makes use of the sine and cosine together with the three laws explained above. This method gives a more accurate solution. 3. Rectangular component method: This is carried out by resolving the forces into their rectangular components. i.e into their x and y components. The resultant is the summation of the x and y components. For example, determine the resultant of the two force system below: 7 F1 30o 10o F2 The resultant R = ΣRx + ΣRy And ΣR y = ( f y ) + ( f y ) 1 Where ΣRx = ( f x )1 + ( f x )2 2 Then, the magnitude of R is found by : R = Rx2 + Ry2 ⎛R ⎞ And the direction is found by: tan −1 ⎜ y ⎟ ⎝ Rx ⎠ Note: all angles are measured counterclockwise from the positive x-axis. 4.0 MOMENT AND COUPLE Moments of a force: The moment of a force about a point is defined as the product of the force and the perpendicular distance measured from the point along the line of action to the force. Three things are considered in taking moment about a point. Consider the diagram below: O is the fixed point of reference. d is the perpendicular distance from O to F which is the force acting. The moment of F about O is Mo = F x d Conventional sign of moment: Clockwise moment is taken to be negative and anticlockwise moment is taken to be positive. 8 For systems in equilibrium; Sum of clockwise moment must be equal to sum of anticlockwise moment about a particular point of reference. Method of determining the moment of a force Depending on the nature of application of a force; there are three methods that can be used to determine the moments of a force (1) by direct method: Using the definition that moment is force multiplied by perpendicular distance. (2)By Varignon’s Theorem: This theorem states that the moment of a force about any point is equal to the sum of the moments produced by the rectangular components of the force. For this theorem to be applied adequately; the forces concerned will first have to be resolved to their rectangular components after which each moment due to individual component is determined and then summed in accordance with the sign convention of moment. (3) By the Principle of Transmissibility: This principle is applied by moving a force from its point of application to any convenient point ( for ease of calculation) along its line of action. WORKED EXAMPLE Determine the moment of force F about O F = 24N 20o 0.7m y O 2m x 6m Solution (a) By direct method: Locate a perpendicular distance from F to O. 9 Project F backwards to P where a line from O meets F at 90o F = 24N 20o 0.7m y Q O d x 2m 20o P Then, d = 4sin20o (since sin 20o = OP ) OQ d = 1.4m Therefore, moment Mo = F x d = 24 x 1.4 = 33Nm (b) By Varigno’s Theorem: Resolve F into rectangular components. Fx = Fcos20o = 24cos20o = 22.6N Fy = Fsin20o = 24sin20o = 8.2N Thus, Moment Mo = - ( Fx x 0.7 ) + ( Fy x 6 ) NB: clockwise Moment is –ve. Mo = -22.6 x 0.7 + 8.2 x 6 = 33Nm Hence, Moment is 33Nm anticlockwise. ( c) By Principle of Transmissibility: Take the force to Q, a convenient point along the line of action of b F Moment Mo = F x d = Fy x 4 = 33Nm y O Fy Q 0.7m Fx 2m x 10 Couple: This is defined as two equal and opposite parallel forces acting on a body. Consider the diagram below. F1 must be equal to F2. F1 x a d a y F2 Moment of a couple: This is defined as the product of one of the force and the perpendicular distance between the forces. i.e. Moment of couple = F1 x (a + b) Addition of couples: Two or more couples acting in a plane or parallel planes can be added algebraically by taking into cognizance the sign convention of moment. Equivalent couples: Two couples acting on the plane or parallel planes are said to be equivalent if they have the same moment acting in the same direction. 4.1 Replacing a force with a force – couple system. x F a d a y Fig. 2 Consider the diagram above. If it is required to move the force F away from X to a point Y at a perpendicular distance d away; without altering its mechanical effect. Then, two equal and opposite forces ( both equal to F) will be placed at Y. Making the point Y have a force and a couple formed by the opposing force F and the original force F at X. See diagram below (fig. 3& 4). 11 F x a d a y F F The two Fs at Y counsels each other out and thus, maintains the mechanical effect of F at x. F at X forms a couple with F at Y. The moment of the couple is F x d. x a d a y My F By this F has been transferred from x to y without any alteration of its mechanical effect. WORKED EXAMPLE Consider the couple system below. (1) Determine the resultant moment of the two couples and (2) Replace the couples by 2 forces applied at point x and y. determine the magnitude of the forces. 12 5KN 10KN 30o 4m 30o 10KN 5KN Solution To determine the resultant; resolve the 5KN to its component forces Fy = 5sin30o = 2.5kN Fx = 5cos30o = 4.3kN The couple system becomes 10KN 2.5KN 4.3KN 4m 10KN 4.3KN 2.5KN Resultant Moment = summation of individual moments of forces: ∑M = + (10 x 4) + (-4.3 x 4) + (-2.5 x 4) = 40 – 10 – 17.2 = - 12.8kNm. Moment is 12.8kNm clockwise. 13 (2) x A d F y F 4m c 4m To cal. line /xy/. [ xy ] = [ xc ] + [ yc ] 2 2 = 42 + 42 = 5.7m But moment = 12.8kNm F.d = 12.8 F = 12.8 / 5.7 = 2.2kN 5.0 RESULTANT OF NON- CONCURRENT COPLANAR FORCE SYSTEM As was defined earlier for non-concurrent coplanar forces; there’s not the same point of action for non- concurrent coplanar forces. Therefore, the location of the line of action of the resultant force is not immediately known. Estimating the resultant and its line of action Resultant: To find the resultant, its magnitude and direction, can be calculated using the rectangular component method introduced earlier. This gives rise to the Rx and Ry components of the resultant and then, its magnitude and resultant and direction can be estimated from: R = Rx2 + Ry2 and the direction α = tan-1( Ry / Rx) ( in its proper sense). Line of Action of the Resultant: To find the line of action which can also be called the location of the resultant; the principle of moment is employed. 14 This is done by equating the sum of individual moments of the forces to the moment of the resultant i.e. ∑M = R. x where ∑ M = sum of moments and x = distance of resultant From point of reference. WORKED EXAMPLE Consider the system of non- concurrent coplanar forces below. F1 F3 F4 ∅3 ∅4 F5 F2 To Estimate The Resultant Resolve the forces to their rectangular components. F1 = 0 + ( - F1y) ; F2 = 0 + F2y ; F3 = (F3cos∅3)x + (F3sin∅3)y ; F = ( F4cos∅4)x + ( - F4 sin∅4)y ; F5 = 0 - F5y The Resultant R is given by: R = Rx + Ry . Rx = F1x + F2x + F3x + F4x + F5x Ö Rx = 0 + 0 + F3Cos ∅3 + F4Cos∅4 + 0 And: Ry = F1y + F2y + F3y + F4y + F5y Ö Ry = -F1 + F2 + F3Sin∅3 + F4Sin∅4 - F5 Hence, knowing the values of F1,F2,F3,F4 and F5 can lead to the final determination of Rx and Ry and thus, R in magnitude and direction. To estimate the location or line of Action of Resultant. - Find the individual moment of the forces about a reference point - Sum up all the values of moment found above 15 - Equate this sum to the moment |R|.x - Compute x from the values of the moment and magnitude |R|. Thus; From diagram above; taking moment about point A. M1 = F1X1; M2 = F2X2; M3 = F3X3; M4 = F4X4; M5 = F5X5 ∑MA = M1 + M2 + M3 + M4 + M5 Then; |Ry|.x = |∑MA| Use the positive value of ∑MA Hence, x = |∑MA| |Ry| And |Rx|. y = |∑MA| .’. y = |∑MA| |Rx| WORKED EXAMPLES 1. Replace the forces acting on the beam in diagram below with a single resultant force and determine its point of application along the beam. 20N 7N 3m 80N 1m 100N 2m 2m B A Solution The question is all about finding the resultant and location of resultant (a) To find the resultant, resolve the forces to its rectangular components Rx = 0 i.e. no force in the horizontal direction Ry = -7 - 20 - 80 + 100 = -7N R = p(02 +72) = 7N 16 R = 7N in the downward vertical (b) To find the location of Resultant: Take moment about A ∑MA = 0 + (-20) x 3 + (-30 x 4) + 100 x 6 = 0 - 60 - 320 + 600 = 220 Nm .’. ∑MA = 220Nm counterclockwise -To find location for Rx – direction: |Rx|.y = 220 No location since Rx is zero. -To find location for Ry |Ry|.x = 220 x = 220 = 31.3m 7 Hence, R (in downward vertical direction) is 31.3m on the left side of A 2. Determine the magnitude of the vertical force F if the resultant of the three forces acting on the object passes through the bearing O. Fcos30 12N 70m 60o 30o 17N O 80m Solution Taking moment about point O. Clockwise Moment = Anticlockwise Moment (FCos 300) x 70 = (17 x 80) + (12 x 110) 17 30m Ö 60.6F = 1360 +1320 = 2680 .’. F = 2680 / 60.6 = 44.2N 3. Determine the resultant of the forces on the truss and its location along AB. 8N 35N 10N 10m 3m 2m 37o 2m 4m 7N For the Resultant: Rx = 7Sin370 = 4.2N Ry = -8 - 35 - 10 -7Cos370 = -58.8 N .’. R = p(4.2)2 + (-58.6)2 = 58.8 N R = 58.8 N α = 2740 For the location: Take moment about A ∑MA = (-8 x 3) + (-35 x 5) + ((-7Cos 370) x 5) + (-10 x 7) = -24 - 175 – 28.0 - 70 = -297 Nm .’. ∑MA = 297 Nm clockwise Ry.x = 297 x = 297 = 5.1m 58.6 18 And Ry is 5.1m to the right of A 6.0 RESULTANT OF DISTRIBUTED LINE LOADS A distributed load is one whose effect is felt across an area of the body on which it is applied. It occurs when the load applied is not concentrated at a point, but is spread over an area, along a line or throughout the entire solid body e.g. Weight of a beam; loads caused by wind pressure and liquid pressure etc. Types of distributed Load 1. Triangular Load: see figure below: F = ½ Pb P b This is define as a distributed load whose intensity (or effect) varies uniformly from zero to a maximum intensity P. e.g. Liquid pressure 2. Uniformly distributed Load: see figure below P b F = Pb The resultant of a distributed load can be determined by replacing each distributed load by its equivalent concentrated load, placed at its centroid. The line of action of the equivalent concentrated load always passes through the centroid. 19 WORKED EXAMPLE Determine the equivalent resultant force of the distributed loads of the figures below. 1. 5KN/m 2KN/m 8m 2m 3m 2. 20 7KN/m 3KN/m b 6m 1m 3. 8KN 1m 6KN 1m 2m 4m CENTROID OF AREAS OF COMMON SHAPES 1. RECTANGLE: 1 c / 2h h 1 1 / 2b 1 / 2h / 2b 21 A = LXB 2. TRIANGLE 2 / 3h h c 1 / 3h 1 2 / 3b / 3b A = ½ bh 3. PARABOLIC SPANDREL 22 2 / 3h h c 1 /3 h 1 3 / 4b / 4b A = 1/3bh 4. SEMICIRCLE c r 4r /3 o A = 1/2 π r2 Assignment: Write and draw other centroids of areas of common shapes into your note. Solution to examples 23 STEPS TO SOLUTION. (i) Divide the loading diagram into the component load distributions. (ii) Calculate the total load equivalent of the distributed loads. (iii) Evaluate the centroids of the associated area of its loading diagram. (iv) Determine the magnitude of the resultant ( or equivalent) load. (v) Determine the location or line of action of resultant from the total moment about a fixed point. 1. The loading diagram can be divided into a triangle and a rectangle. Thus; 3KN/m 2KN/m A B Let F1 = total load equivalent of rectangle = 2x10 = 20kN Let F2 = total load equivalent of triangle = 1/2 x 2 x 3 = 3kN The centroid of rectangle = ½ b = ½ x 10 = 5m The magnitude of the resultant is given by: 24 20N 3KN B A 5m 4.3m 3.7m Ry = - 20 – 3 = -23kN. ∴ R = 23kN downwards. The location of the line of action. Taking moment about A ∑MA = - 20 x 5 + (- 3 x 7.3) = - 100 – 21.9 = -121.9kNm ∴ ∑MA = 121.9kNm clockwise. Thus; /Ry/.x = 121.9 x = 121.9/23 = 5.3m .’. R = 23kN downwards at 5.3m to the right of X. 2. There are 2- types of loading: rectangular and parabolic spandrel shape. Hence; 25 21KN 4KN/m 1.3KN 3KN/m y 3.5m 3.25m 0.25m Equivalent load of rectangle = 3kN/m x 7 = 21kN “ “ “ Spandrel = 1/3 x 1 x 4 = 1.3kN. Centroids: For rectangular = ½ b = ½ x 7 = 3.5m For Spandrel (from tip) = (¾ x 1) + 6 = 6.75m Magnitude of resultant Ry = -21 – 1.3 = -22.3kN R = 22.3kN downwards. Location of the line of action. Taking moment about Y ∑My = ( - 21 x 3.5) + ( - 1.3x 6.25) = - 82.405kNm My = 82.405kNm clockwise. Thus; /Ry/.x = 82.405 x = 82.405/22.3 = 3.7m. Therefore; Resultant is 22.3kN downwards at 3.7m to the right of y 3. The distributed load is of 2-types: a rectangle and a triangle. It also contains a concentrated load of 8KN 26 8KN 12KN 12KN 7KN u z 1m 2m 2.30m 2.70m Total equivalent load on triangle =1/2 x 4x 6 =12 Total equivalent load on rectangle = Lxb = 2x6 =12 Concentrated load = -8KN Magnitude of Resultant Ry= -12KN -12KN – 8KN = -32KN R = 32KN downwards. Centroids : for triangles = 2/3x b = 2/3 x 4 = 2.71m For rectangle = Lxb =1/2x6 = ½ x 2 = 1m Location Of the Line Of Action: Taking moment about z ∑Mz = (-12 x 2.7) + (-12 x 5 ) + (-8x7) = -148.4KN Mz = 148.4KNm clockwise Thus: /Ry/. x = 148.4 x = 148.4/32 = 4.6m. 7.0 APPLICATION OF VECTORS TO RESOLUTION OF VECTORS 27 Vector quantities are quantities which have both magnitude and direction. The magnitude is the scalar quantity represented by real numbers while the direction is given in terms of rectangular components x and y (coplanar forces) as i and j respectively. The i and j can also be said to be unit vectors which are in the direction of the positive sense of x and y axes respectively. For instance, if a force F can be represented in its rectangular components by Fx and Fy; then, vectorially, the force is written in magnitude and direction as Fxi and Fyj Thus: F = Fxi + Fyj Diagramatically: F y Ф x Where Fx = FCos∅ Fy = FSin∅ ⎛ Fy ⎞ ⎟ ⎝ Fx ⎠ φ = tan −1 ⎜ The magnitude of F can also be computed as before as: F = Fx2 + Fy2 EXAMPLES 1. A force of 500N is exerted on a particle as shown in the diagram (a) below. Determine the horizontal and vertical components of the force and write the force in its vectorial form. 28 2. Diagram (b) below shows that the tension in the rope T is 80N. (i) Determine the horizontal and vertical components of the Tension. (ii) Compute the direction of the Tension T and write out the vector form of the Tension. y 30o T 3m x 4m 500N b a Solutions 1. Representing the force in its triangular components gives: Fx = FCos∅ = 500Cos 300 = 433N Fy = -FSin∅ = -500Sin 300 because Fy is in the negative sense of y; or Fy = FSin(360 - 30)0 (∅ = 330o) = 500Sin3300 = -250N Horizontal Component = Fxi = 433Ni Vertical Component = Fyj = -250Nj Vectorially, f = (433i – 250j) N 2. Representing the Tension in its triangular form: Computing ∅ Tan ∅ = ¾ = 0.75 ∅ = Tan-1 0.75 = 36.870 Thus; Tx = TCos ∅ and Ty = -TSin∅ Tx = 80Cos (36.870) and Ty = -TSin∅ Tx = 64N and Ty = -48N (i) The Horizontal Component = Txi = 64Ni 29 The Vertical Component = Tyj = -48Nj (ii) Direction of Tension is: α = tan-1 Ty = tan-1 -48 Tx = 64 α = 3230 and T = (64i – 48j) N 8.0 RESULTANT OF COPLANAR FORCES IN VECTOR FORM Just as the vector form of representing forces can be adapted suitably with resolution of coplanar forces; it can also be used effectively in the analysis of the resultant of coplanar forces. Since the resultant of a set of forces acting on a body is the sum total of the individual effect of each force making up the system of forces; the resultant R can then be analysed as: n R = ∑ Fi where Fi is the individual force making up the system of forces. i =1 Meaning that, if F1, F2, F3, …, Fn are the forces acting; the resultant R is given by R = F1 + F2 + F3 + … + Fn in resulting magnitude and direction. Therefore, component wise, the resultant R will be: R = ∑ Rx i + ∑ Ry j --------------------------------------------------------------- (1) For example: Assume the forces acting on a body are T, P and Q The Resultant R = T + P + Q Resolving each force into its rectangular components gives: Rxi + Ryj = (Txi + Tyj) + (Pxi + Pyj) + (Qxi + Qyj) = (Tx + Px + Qx)i + (Ty + Py + Qy)j It follows by vector rule that: Rx = Tx + Px + Qx and Ry = Ty + Py + Qy -------------------------------- (2) Equations (2) and (1) therefore agrees. We can then conclusively say that the components Rx and Ry of the resultant R of a system of forces can be obtained by adding algebraically the corresponding scalar components of the individual forces. RULE FOR ANALYSIS 30 To use the vector form of analysis to solve for the resultant of a system of forces; the following rule must be adhered to for easy estimation. 1. Resolve the individual force in the system to its rectangular components 2. Sum up the forces, component by component to determine the resulting components of the Resultant 3. Using the values derived from above step; write out the resultant R as R = Rxi + Ryj 4. Compute magnitude of R as R = Rx2 + Ry2 5. Compute the direction of R as tan α = Ry Rx where α is the required direction in its proper sense. WORKED EXAMPLES Using the vector method of analysis, find the resultant of the following systems of forces 31 y 40N 1. 2. y 50N o 45 62N 50o x x 30o 50o 35N y 80N 4. 3. y 10N 30N 10N x 50o 10o 30o x 15o 80N 10N 5. If the Resultant of the system of forces shown is zero. Find the values of P and Q. 5. 6. T= 50N Q Q S= 150N o 50 30o 50o 10o P 6. If the Resultant of the system is zero. Determine the values of P and Q 32 T= 80N Solutions 1. Resolve into rectangular components F1x = (40Cos 450)N = 28.30N F1y = (40Sin 450)N = 28.30N F2x = (35Sin 300)N = 17.5N F2y = -(35Cos 300)N = -30.3N F3x = -(62Sin 500)N = - 47.5N F3y = -(62Cos 500)N = - 39.9N Summing by Components .’. Rx = F1x + F2x + F3x = (28.3 + 17.5 + (- 47.5)) N = -1.7N Ry = F1y + F2y + F3y = (28.3 + (-30.3) + (-39.9)) N = -41.9N Writing the vector R = (1.7i – 41.9j) N i.e resultant is in the 3rd Quadrant Magnitude of R |R| = pRX2 + RY2 = p(-1.7)2 + (-41.9)2 = 41.9N Direction Tan α = Ry = -41.9 = 24.647 Ry -1.7 α = tan-1(24.647) = 87.80 In the proper sense, direction is 1800 + α = 1800 + 87.80 = 267.80 2. T1x = 0N T1y = 50N T2x = -(80Sin500)N = -61.3N T2y = -(80Cos500)N = -51.4N .’. Rx = T1x + T2x = (0 + (-61.3N)) = -61.3N Ry = T1y + T2y = (50N + (-51.4N)) = -1.4N Ö (-61.3i – 1.4j) N .’. |R| = p(-61.3)2 + (1.4)2 = 61.3N 33 ⎡ −1.4 ⎤ = 1.3o ⎥ ⎣ −61.3 ⎦ α = tan −1 ⎢ .’. Direction = 180 + α = 181.30 3. T1x = 10N T1y = 0N T2x = -80Sin300 = -40N T2y = -80Cos300 = -69.3N Rx = T1x + T2x = 10 + (-40) = -30N Ry = T1y + T2y = 0 + (-69.3) = - 69.3N R = (-30i – 69.3j) N R = ( −30 ) + ( −69.3) 2 α = tan −1 2 = 75.5 N −69 = 66.6o −30 Direction = 1800 + α = 246.60 (in the 3rd Quadrant) 4. T1x = -30Sin 100 = -5.2 N T1y = 30Cos 100 = 29.5 N T2x = 10Sin 500 = 7.7 N T2y = 10Cos 500 = 6.4 N T3x = 10Cos 150 = 9.7 N T3y = -10Sin 150 = -2.6 N Rx = T1x + T2x + T3x = (-5.2 + 7.7 + 9.7) N = 12.2 N Ry = T1y + T2y + T3y = (29.5 + 6.4 + (-2.6)) N = 33.3 N .’. R = (12.2i + 33.3j) N R = (12.2 ) + ( 33.3) α = tan −1 2 2 = 35.5 N 33.3 = 69.9o 12.2 Direction = α = 69.90 (in the 1st Quadrant) 34 5. If the Resultant R = 0 Then R = Rxi + Ryj = 0 Rx = 0 and Ry = 0 Therefore; Tx = 50Cos 300 = 43.3 N Ty = 50Sin 300 = 25 N Qx = 0 and Qy = Q N Px = -PSin 100 N and Py = -PCos 100 N Rx = Tx + Qx + Px = 43.3 + 0 – PSin 100 (1) Ry = Ty + Qy + Py = 25 + Q – PCos 100 (2) But Rx = 0 and Ry = 0 Then: (1) becomes 43.4 – PSin100 = 0 Ö PSin 100 = 43.3 And P = 43.3 = 249.4 N sin10o And (2) becomes 25 + Q – PCos 100 = 0 Substitute the value of P Ö 25 + Q – 249.4Cos 100 = 0 Q = 249.4Cos 100 – 25 = 220.6 N Thus: P = 249.4 N and Q = 220.6 N 6. If the Resultant R = 0,then Rx and Ry = 0. Therefore, Px = PSin 500 N Py = PCos 500 N Qx = -QSin 500 N Qy = QCos 500 N Tx = 80N, Ty = 0N Sx = 0 N, Sy = 150 N .’. Rx = Px + Qx + Tx + Sx = PSin 500 + (-QSin 500) + 80 + 0 =0 35 Ö Rx = PSin 500 – Qsin 500 + 80 = 0 (1) Ry = Py + Qy + Ty + Sy = 0 = PCos 500 + QCos 500 + 0 + 150 = 0 Ry = PCos 500 + QCos 500 + 150 = 0 (2) Equation (1) can be written as: PSin 500 –Qsin500 = -80 (3) Equation (2) can be written as: PCos 500 + QCos 500 = -150 (4) Solve equations (3) and (4) simultaneously From (3) and (4) PSin 500 = -80 + QSin 500 (from (3)) PCos 500 = -150 – QCos 500 (from (4)) Divide (3) by (4) Psin 500 = -80 + QSin 500 PCos 500= -150 – Qcos 500 Tan 500 = -80 + QSin 500 N.B: Tan∅ = Sin∅ -150 – Qcos 500 Cos∅ 1.192 = -80 + QSin 500 -150 –Qcos 500 Cross Multiply: (1.192)(-150-QCos500) = -80 + QSin 500 Ö -178.8 – 0.8Q = -80 + QSin 500 Collect like terms: -0.8Q – Qsin 500 = -80 + 178.8 -Q(0.8 + Sin 500) = 98.8 Q= 98.8 = −61.8 N −1.6 Put the value of Q into (3) PSin 500 – (-61.8)Sin 500 = -80 36 PSin 500 + 61.8Sin 500 = -80 .’. PSin 500 = -80 -61.8Sin 500 P= −80 − 61.8sin 50o −127.3 = = −166.2 N sin 50o 0.766 Thus: P = 166.2N in opposite direction to diagram and Q = 61.8 N in opposite direction to diagram. 9.0 EQUILIBRIUM OF A PARTICLE A particle is said to be in equilibrium when the resultant of all the forces acting on it is zero i. e. R = ∑F =0 Meaning that, if a body is acted upon by two or more forces, the equilibrium condition is satisfied if the resultant of all forces equals zero. Hence, summarily, it could be said that “for a system in equilibrium; sum of forces in one direction must equal sum of forces in opposite direction.” Mathematically, ∑F ∑F x =0 y =0 9.1 VECTOR REPRESENTATION OF EQUILIBRIUM CONDITION Coplanar forces (forces in x-y plane) are represented in magnitude and direction by showing its x and y components in the proper sense of i and j unit vectors. Algebraically, coplanar forces in the x - y component representation are described in vector form as: F = Fxi + Fyj The resultant of a system of forces is represented as: R= Rxi + Ryj For a system of forces in equilibrium, the condition that must be satisfied is: Rx = 0 Ry = 0 37 9.2 MOMENT CONDITION FOR EQUILIBRUIM Just as was stated for the force conditions of equilibrium, there is also a similar condition adapted to the moment of forces keeping the system in equilibrium. This condition states that “For a system in equilibrium under the action of external forces, the moment of all the forces about a fixed point is zero”. This means that, the moment condition for equilibrium can also be stated as that “the sum of moments in one direction is equal to the sum of moments in the other direction”. i.e. Clockwise moment = Anticlockwise moment. Mathematically; For a system in equilibrium; Total moment about a fixed point = 0 ∑M = 0 Hence, Sum of clockwise moments = Sum of anticlockwise moments 9.3 TYPES OF EQUILIBRIUM According to Newton’s first law of forces: there are basically two types of equilibrium: (1) Static Equilibrium and (2) Dynamic Equilibrium. Static Equilibrium: this is the state of a body at rest. In which case, the velocity of the body is zero i.e. rate of change of distance with time is zero. Dynamic Equilibrium: this is the state of a body moving with uniform velocity; in which case the acceleration remains zero i.e. the rate of change of velocity with time is zero. Hence, a body moving in a straight line with uniform velocity, or a body rotating about a fixed point with constant angular velocity is said to be dynamically stable. Whatever is done after to alter the equilibrium condition of a body will also alter simultaneously the velocity state of the body. 38 WORKED EXAMPLE 1. Determine the magnitude and direction of the force F1 which will keep the box of 50kg, acting on an inclined plane of 20º to the horizontal in equilibrium. (g=10m/s2) F 20o 50kg For the box to be in equilibrium, it must be moving in a direction Ø=20º to the horizontal. Completing and using the triangle of force resulting from the system: sin 20o = F Mg F = MgSin20º = 50 x 10 x Sin20º = 171.0 N F = 171.0 N in direction Ø = 20º to the horizontal 2. Using the angle measurements only, determine the magnitude of T1 and T2 that keeps the system in equilibrium. 39 T2 15m T1 6m γ α 7m 9m 100N Solution Using the triangles ACB and DCE to find the angles: Consider triangle ACB Tan α = 6 7 α = Tan-1 (6/7) = 40.6º And also consider triangle DCE Tan γ = 15 9 γ = Tan-1 (15/9) = 59.0 Hence, Σfx = -T2Cos40.6º + T1Cos59º = 0 T1Cos59º = T2Cos40.6º T2 cos 40.6o T1 = cos 59o T1 = 1.5 T2 ------------------------- (1) Also, ΣFy = T2Sin40.60 + T1Sin590 – 100 = 0 T2Sin40.60 + T1Sin590 = 100 --------------- (2) 40 Put (1) into (2) T2Sin40.60 + (1.5T2) Sin590 = 100 T2 = 100 0 = 51.6 N 0 (Sin40.6 + 1.5Sin59 ) T2 = 51.6 N PRACTICE QUESTION Two ropes attached to the top of two poles (as shown in the diagram) are used to hold a boat on the sea in position. If the effective weight of the boat is 2.6Kg. Calculate the value of the Tension T. (Take g = 10m/s2) T T 4m 3m 3m 41 4m 10.0 FREE BODY DIAGRAM A free body diagram is defined as a diagram which shows clearly a body isolated from its support and indicating all the external forces acting on the body. In solving a problem involving equilibrium, it is important that only all the forces (external) acting in the system be considered. An omission of one or the addition of one will lead to a change in the conditions of equilibrium and produce an untrue result of the system. A properly drawn free body diagram gives a detailed account of all the external forces acting on the body in question. The solution of statics problems depends to a large extent on the correct construction of free body diagram. The free body is only a schematic diagram of the real body isolated from its supports and represented by lines. 10.1 COMPONENTS OF A FREE BODY DIAGRAM 1. Applied Forces: Those are the loads subjected to a body. They must be shown by their magnitude and direction and point of action.h 2. Reactions: These represent the constraints of supports or connected bodies. The showing of the reactions is such that they obey Newton’s Law of action. 3. Weight: This is the gravitational attraction of a body due to the earth. It is always vertically downward through the centre of gravity of the body in question. 4. Dimensions and Angles: The significant line and angle distances must be shown clearly by a free body diagrams. 10.2 FREE BODY DIAGRAM OF THREE FORCE SYSTEM IN EQUILIBRIUM 42 These forces are shown to point round a triangle in a direction head to tail. This shows that the resultant of the system is zero. Hence, system is in equilibrium. 43