MARWARI COLLEGE,RANCHI
A
Dissertation
Submitted in partial fulfilment of the requirements for the degree of
INTEGER PROGRAMMING OF OPERATION RESEARCH
BY
NAME - KAUSHAL RAJ
DEPARTMENT - MATHEMATICS(M.Sc)
EXAM ROLL NO. - 19MCRMS540013
REGISTRATION NO. - MCR19M540013
CLASS ROLL NO. - 52
SESSION - 2019 -2021
Under the Supervision of
Prof. Arvind Kumar (H.O.D)
2
Certificate
This is to certify that the dissertation entitled, “Integer
Programming” submitted to Marwari College,Ranchi in
partial fulfillment of requirement(Paper code- PRMAT
404) for the award of the Degree of Master of Science
is a record of original work done by Mr. Kaushal Raj
,Examination Roll No.- 19MCRMS540013, Registration
no.-MCR19M540013,Semester- iv, during the period
of the study (2019-2021) in the PG Department of
Mathematics, Marwari College Ranchi, Under my
guidance and supervision.
Signature
Prof. Arvind Kumar
Head of Department + Supervisor
PG Department of Mathematics,
Marwari College,Ranchi
Signature
External Examiner
3
Acknowledgement
I would like to express my special thanks of gratitude to my
Prof. Archana Kumari as well as our HOD Prof. Arvind Kumar
who gave me the excellent opportunity to do this wonderful
dissertation on the topic “Integer Programming”. They have
helped me in doing a lot of research and I came to know about
so many new things.
Secondly, I would also like to thank my family, my teachers and
my friends for constantly encouraging me during the course of
this project, which I could not have completed without their
support and continuous encouragements. They helped me a
lot in finalizing this project within the limited period. They
always stand with me with their patience, motivation,
enthusiasm and immense knowledge.
Thanking You
Kaushal Raj
DECLARATION
I, hereby declare that the dissertation entitled "Integer
Programming of Operations Research ” that is being submitted
by me in partial fulfillment of the requirements for the award
of the degree of Master of Science in Mathematics to PG
Department of Mathematics , Marwari College is a record of
bonafide work carried out by me.
The results embodied in this dissertation have not been
submitted to any other University or Institution for the award
of any Degree.
Kaushal Raj
Page | 4
PROJECT
“INTEGER PROGRAMMING”
Page | 5
6
CONTENTS
Page No.-
1) CHAPTER 1: Integer programming problem
a.
b.
c.
d.
e.
f.
g.
Introduction
Origin
Development
Definition
Importance of I.P.P.
Types of Integer programming problems
Methods of solving Integer programming
problems
8
9
10
10
11
11
12
2) CHAPTER2: The Branch and Bound Method
a.
b.
c.
d.
e.
f.
Introduction
Algorithm
Example
Tree diagram of Branch and Bound method
Application
Advantage
13-15
15-16
17-21
22
23
24
7
3) CHAPTER 3: Gomory’s cutting plane method
a.
b.
c.
d.
e.
f.
g.
Introduction
How to construction of Gomory’s constraints
Algorithm
Flow chart
Example 1
Example 2
Graphical interpretation of Gomory’s cutting
plane method
h. Application
i. Advantage
•
CONCLUSION
•REFERENCE
25
26-30
31-33
34
35-41
42-54
55-57
58
59
60-61
62
8
CHAPTER 1
a. INTRODUCTION
As the name implied “Integer Linear Programming Problems” are the
special class of linear programming problems where all or some of
the variables in the optimal solution are restricted to nonnegative
integer values. Such problems are called as “all integer” or “mixed
integer” problems depending, respectively, on whether all or some
of the variables are restricted to integer values.
One might think it’s sufficient to obtain an integer solution to this
special class of linear programming problems by using regular
simplex method and then rounding off the fractional values thus
occurring in the optimal solution. But in some cases, the deviation
from the “exact” optimal integer values (as a result of rounding) may
become large enough to give an infeasible solution. Hence there was
a need to develop a systematic procedure in order to identify the
optimal integer solution to such problems.
9
b. ORIGIN
In 1956, R.E. Gomory suggested first of all the systematic method to
obtain an optimum integer solution to an “all integer programming
problems.” Later, he extended the method to deal with the more
complicated case of “mixed integer programming problem” when only
some of the variables are required to be integer. These algorithms are
proved to converge to the optimal integer solution in a finite number of
iteration making use of familiar dual simplex method. This is called the
“cutting plane algorithm” because it mainly introduced the clever idea
of constructing “secondary” constraints which, when added to the
optimum (non integer) solution, will effectively cut he solution space
towards the required result. Successive application of these constraints
should gradually force the non integer optimum solution towards the
desired “all integer” or “mixed integer” solution.
10
c. DEVELOPMENT
A general algorithm for solving “all integer” and “mixed integer” linear
programming problems was developed by A.H. Land and A.G. Doig
(1960). Also, Egon Balas(1965) introduced an interesting enumerative
algorithm for L.P. problem with the variables having the values zero or
one, called the zero one programming problem.
Several algorithm have been developed so far for solving the integer
programming problems. But, in this chapter, we shall discuss only two
methods: (1) Branch and bound method, and (2) Gomory’s cutting
plane method
d. DEFINITION
The 'Integer Programming Problem' abbreviated as I.P.P. is special
class of
linear programming problem (L.P.P.) where all or some of the variables
in the optimal
solution are restricted to assume non-negative integer values.
Thus, the general I.P.P. can be stated as follows.
Optimize the linear function
11
and some x are integers.
e. Importance (or need) of I.P.P.
Quite often, in business and industry we require the discrete nature (or
values) of the variable involved in many decision-making situations. For
example in a factory manufacturing trucks or cars etc. the quantity (or
number) manufactured can be whole (discrete) number only as a fraction
of truck or car is not required. In assignment problems and travelling
salesman problems etc., the variables involved can assume integer
values only. In allocation of goods, a shipment must involve a
discrete number of trucks etc. In sequencing and routing decisions we
require the discrete values of variables. Thus, we come across many
integer programming problems and hence need some systematic
procedure for obtaining the exact optimal integer solution to such
problems.
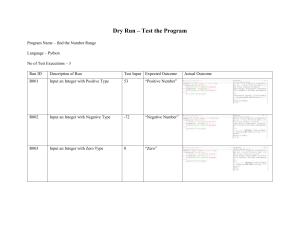
f. TYPES OF INTEGER PROGRAMMING PROBLEMS
Linear integer programming problems can be classified into three
categories:
(i) Pure (all) integer programming problems in which all decision
variables are restricted to integer
values.
(ii) Mixed integer programming problems in which some, but not all, of
the decision variables are
restricted to integer values.
(iii) Zero-one integer programming problems in which all decision
variables are restricted to integer values of either 0 or 1.
12
Integer Programming Problems
Linear Integer Programming
Non-linear Integer Programming
Problems
Pure Integer
Problems
Mixed Integer
Problems
Problems
0–1
Problems
(i) Cutting Plane
Method
(i) Cutting Plane
Method
(ii) Enumerative (or
Branch and
Bound) Method
(ii) Enumerative
Method
Polynomial
Programming
Problems
(iii) Balas Additive
Method
g.Method of solving integer programming problems
Branch and bound method
Gomory’s cutting method
General
Non-linear
Problems
Pure Integer
Problem
Mixed Integer
Problem
Generalized Penalty
Function Method
13
Chapter 2
The Branch-and-Bound method
a. INTRODUCTION
This technique is applicable to both all integer programming problems
as well as to mixed integer programming problems. This is the most
general technique for the solution of an I.P.P. i,n which only a few or all
the variables are constrained by their upper or lower bounds, or by both.
The technique, called the Branch-and-Bound method, for a
maximization problem is discussed below.
Let the given I.P.P. be as follows :
n
Max. Z = ∑ cjxj
...(1)
j =1
subject to the constraints
n
∑ aijxj ≤ bi , i = 1, 2, ...., m
j =1
xj is integral valued for
and
x j≥ 0, for
...(2)
j = 1, 2, ...., r ≤ n
… (3)
j = r + 1, r = 2, ...., n
... (4)
Also let there exist lower and upper bounds for the optimum values of each
14
integef valued variable xi such that
Lj ≤ xj ≤Uj , j= 1, 2, ...., r.
..(5)
Thus, any optimum solution of (1) to (5) must satisfy only one of the
constraints
xj ≤ [xj ]
…(6)
—(7)
and xj ≥ (xj)+1
Thus, ignoring the integer restriction (3) if xj * is the value of the variable xt in
the optimum solution of the above L.P.P. given by (1) to (5),then in an integer
valued solution we have
either
Lt ≤ xt ≤ [xt_*]
...(8)
—(9)
or [xt*] + 1 xt ≤ U
For example if x1 = 3.5 (ignoring integer constraint) then in integer
valued solution
either L1 ≤ X1 ≤
3 or 4 ≤ x1 ≤ U1
Thus, the given I.P.P. given by (1) to (5) has two sub-I.P. problems :
(i) given by (1), (2), (3), (4) and (8)
and (ii) given by (1), (2) (3), (4) and (9)
In the above two sub-problems constraint (5) is modified only for xt (i. e., for
xj, j= t)
Now solve these two sub I.P. problems. If the two problems posses integer
15
valued solution then the solution having the larger value of Z is taken as the
optimum solution of the given problem. If either of these sub-problems does not
have an integer valued solution then sub-divide this again into two sub-problems
and proceed similarly till an optimum integral valued solution is obtained.
b. Branch-and-Bound Algorithm
The systematic step by step solution of an I.P.P. by Branch-and-Bound
technique is as follows :
Step 1 : Solve the given I.P.P. ignoring the integer, valued constraint.
Step 2 : Test the integrability of the optimum solution obtained in step 1. Now
there are two possibilities.
(i) The optimum solution is integral valued then the required solution
is obtained.
(ii) The optimum solution is not integral valued then proceed to the
next step 3.
Step 3 : If the optimal value xt* of the variable xt is fractional then form two
subproblems.
Sub-problem 1
Given problem with one
more constraint
xt ≤ [xt*]
Sub-problem 2
Given problem with one
more constraint
xt ≥ [xt*] + 1
16
Step 4 : Solve the two sub-problems 1 and 2 obtained in step 1. Now there are
three possibilities.
(i) If the optimal solutions of the two sub-problems are integral valued
then the required solution is that which given large value of Z.
(ii) If the optimal solution of one sub-problem is integer value and the
other sub-problem has no feasible optimal solution, then the
required solution is that of the sub-problem having integer valued
solution.
(iii) If the optimal solution of one sub-problem is integer valued while
that of the other sub-problem is fractional valued then record the
integer valued solution and repeat step 3 and 4 for the fractional
valued sub-problem. Continue step 3 and 4 iteratively, till all
integral valued solutions are recorded.
Step 5 : From all the recorded integral valued solutions choose that solution
which given the largest value of Z. This is the required optimal solution of
the problem.
17
c.
EXAMPLES:
Example 1 : Use Branch-and-Bound technique to solve the following problem.
Max.
Z=
7x1 9x2
Subject to — x1 + 3x2≤ 6
7x1 + x2≤ 35
O ≤ x1, x2 ≤ 7
x1, x2 are integers.
Solution :
Step 1 : The given problem ignoring the integer value constraint can be written as
Max.
Z = 7x1 + 9x2
s.t.
— x1 + 3x2 ≤ 6
x1 + x2 ≤ 35
x1 ≤ 7
x2 <_7
and
x1, x2 ≥ 0 .
Solving by graphical method the optimal solution is given by
x1 = 9/2 = 4.5, x2 = 7/2 = 3.5 and Max. Z = 63
Step 2 : Since the solution is not integral valued. First we choose x1,
[x1 ] = [9/2] = 4
18
Step 3 : Now we form the following two sub-problems
Sub-Problem 1
Max.
Z = 7x1 + 9x2
s.t
-x1 + 3x2 ≤ 6
7x1 + x2 ≤ 35
xl ≤ 4
x2 ≤7
x1 , x 2 ≥ 0
19
.Sub-Problem 2
Max
Z = 7x1 + 9x2
-x1 + 3x2 ≤ 6
s.t
7x1 + x2 ≤ 35
xl ≥ 5
x2 ≤7
x1 , x 2 ≥ 0
Step 4 : Solving the above sub-problems by graphical method . we get the optimal
solutions as follows.
Sub-Problem 1.
xl = 4, x2 = 10/ 3 = 33, Max. Z = 58
Sub-Problem 2.
x1 = 5, x2 = 0 and Max. Z = 35
which has integral values.
Since the solution of Sub-Problem 1 is not integral as x2 = 10/3, i.e.,
[x2] = 3
we sub-divide sub-problem 1 into the following two sub-problems.
Sub-Problem 3
Max. Z = 7x1 + 9x2
s.t. –x1 + 3x2 ≤ 6
7x1 + x2 ≤ 35
x1≤ 4
Sub-Problem 4
Max.
Z = 7x1 + 9x2
s.t.
— x1 + 3x2 ≤ 6
7x1 + x2 ≤ 35
x1≤ 4
20
x2 ≤_3
x1 , x2 ≥ 0
Solving the above problems by graphical method .
We get the optimal solution as follows.
Sub-Problem 3. x1 = 4, x2 = 3, Max. Z = 55
Which is integral valued solution.
Sub-problem 4. No-feasible solution.
x2≥4
x1, x2 ≥0
21
Step 5 : In the solutions of the sub-problems we get the following
integer values
solutions.
(i)
(ii)
X1 = 5, x2 = 0, Max. Z = 35 and
X1 = 4, x2 = 3, max. Z = 55
larger of these two values of Z is 55.
Hence, the required optimal solution is
X1= 4, x2 = 4,
Max. Z = 55
22
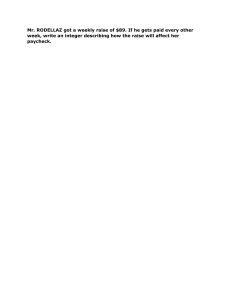
The entire procedure (Branch and Bound) is given in the following
figure.
d. (Tree diagram of branch and bound method)
23
e. APPLICATION OF BRANCH AND BOUND METHOD
This approach is used for a number of NP hard problems.
1 Integer programming
2 Non linear programming
3 Travelling salesman problem
4 Quadratic assignment problem
5 Maximum satisfiability problem
6
Nearest neighbor search
7 Flow shop scheduling
8 Cutting stock problem
9 Computation phylogenetics
10 Set inversion
11 Parameter estimation
12 Set cover problem
13 Structured prediction in computer vision
Branch and bound may also be a base of various heuristics. For example one may
wish to stop branching when the gap between the upper and lower bounds becomes
smaller than a certain threshold.
24
f. ADVANTAGE
An important advantage of branch and bound algorithm is
that we can control the quality of the solution to be
expected, even it is not yet found. The cost of an optimal
solution is only up to smaller than the cost of the best
computed one .
25
CHAPTER 3
Gomory's Cutting plane Method
a. INTRODUCTION
In this method, the I.P.P. is first solved by the regular simplex method, ignoring
the integer condition of the variables. If all the variables in the optimum solution
thus obtained have integer values, the current solution is the desired optimum
integer solution, otherwise the considered L.P.P is modified by inserting a new
constraint known as "Gontoty's constraint" which reduces some non-integer values
of variables to integer one but does not eliminate any feasible integer. Then an
Optimum solution to this modified I.P.P. is obtained by using standard algorithm.
If all the variables in this solution obtained are integers then the optimum solution
of the given I.P.P is attained otherwise another Gomory's constraint is inserted in
the above L.P.P. and again this new problem is solved to get an integer valued
optimum solution. This procedure is repeated interatively until the required integer
valued optimum solution is obtained.
26
b. Construction of Gomory's Constraint
and Gomory's Cutting Plane
The construction of the Gomory's constraint is based on the fact that a
solution which satisfies the constraints in the given I.P.P. also satisifies any other
constraint derived by adding or subtracting two or more constraints or multiplying
a constraint by a non-zero number.
Now first we introduced two notions as follows.
[a] = largest integral part of number a,
i. e., the greatest integer less than or equal to a,
and f = positive fractional part of number a,
thus, we have a = [a] + f, clearly 0 f < 1.
For example
(0 if a = 13/3, then [a] = 4 and f =1/3 , so that 13/3 = 4 + 1/3
and (ii) if a = — 13/3, then [ a] = — 5 and f = 2/3 so that — 13/3 = — 5 +2/3.
Now we proceed for the construction of the Gomory constraint, as follows.
Let the optimum solution of the maximization L.P.P. (ignoring the condition of
integer values of the variables) obtained by simplex method be expressed by the
following table : Note that in this table the basic variables xB1, XB2. , XBm are
arranged in order for convenience
27
Let the i-th basic variable xBi be non-integer.
Note that 1≤ i ≤m
therefore Using i-th row of the above table , we have
xBi = O. x1 + O. x2 + …. + 1.xi +…. + O.xm +Yi, m + l XM+1+….+YinXn
n
= xi + ∑
j=
yij xj
m +1
n
therefore Xi = XBi — ∑
yij xj
……1
j=m +1
Let
where
xBi = [xbi]+ fBi and yij = [yij] +fij
[xBi = Largest integral part of xBi , i.e., [xBi ] ≤xBi
28
and [yij] = Largest integral part of
yij, i.e. ,[y ij ] ≤ yij
fBi = positive fractional part of xBi , i.e., 0≤ fBi < 1
and
fij = positive fractional part of yij, i.e., 0 ≤fij < 1
Clearly (xBi) ≤xBi , [(yij)≤yij , 0 ≤fBi < 1 and 0 ≤fij< 1
Thus, from (1), we have
n
∑ {[yij+Fij}xj;
xi = {[xBi ]+ fBi } —
j =m +1
n
or .
n
fbi —∑fijxj = xi— [xbi] + ∑[yij] XJ
j = m+1
… (2)
j = m +1
Now if the variables xi (i = 1, 2,. .. , m) and xj (j = m + 1,…. n) are all
n
integers then the R.H.S of (2) is an integer and hence the L.H.S. fBi — ∑
fij xj
j = +1
of (2) must also be an integer.
n
Since ∑ fij•xj• is positive;
j =m +1
n
f —∑ fij Xj ≤fBi <1,
therefore Bi
j = m +1
n
i.e., f Bi
—∑ fij x j is an integer less than 1. Thus, it can either be zero or
j = m+1
negative integer.
Hence, we have the inequality
29
n
fBi - ∑fij Xj≤ 0
j =m+ 1
n
-∑ fijxj≤ -fBi
or
j =m +1
or —∑ fij xj ≤— fBi
(3)
j€ R
where R is the set of indices corresponding to all non-basic variables.
This is called the Gomory constraint.
Introducing the non-negative slack variable xGi ; the above inequality reduce to
the constraint equation.
n
-∑ fijxj + xg1 = -f Bi
. . . (4)
j = m +1
By definition xGi must also be an integer.
The constraint equation (3) is called Gomory constraint equation or
Gomory cutting plane.
Adding the Gomory constraint equation (3) to the optimum simplex table old table
we obtain the following new table
30
Since—fBi is negative, the optimum solution given by the above table is not
feasible hence we apply the dual simplex algorithm to obtain the optimum feasible
solution.If all the variables in the solution thus obtained are integers then the
processends otherwise we construct the second Gomory constraint from the
resulting simplex table, introduce it in that table and solve by dual simplex
algorithm.The process is repeated until an integer value solution is obtained.
31
c. All-Integer Cutting Plane Algorithm
i.e. Computational Procedure for the Solution of all
I.P.P. by Gomory Method
It consists of the following steps systematically.
Step 1 : If the problem is of minimization, convert it into the
Maximization problem.
Step 2 : Make all the bi 's positive.
Step 3 : Convert the constraints into equations by introducing the nonnegative
slack and/or surplus variables.
Step 4 : Obtain the optimum solution of the given L.P.P. ignoring the
integer
condition of the variables by using simplex algorithm.
Step 5 : Test the integerability of the optimum solution obtained in step
4. Now there are two possibilities.
(a)
The optimum solution have all integers values, then the
required solution has been obtained.
32
(b) The optimum solution does not have all integral values then
proceed to the next step.
Step 6 : If only one variable say xk = xBi has the fractional value, then
corresponding to the i-th row in which this fractional variable lies
in theoptimal simplex table (obtained in step 4), form the
Gomory's constraint
by using the formula
n
∑ -fijxj≤ -fBi
j€r
where R is the set of indices corresponding to all non-basic variables.
However, if more than one variable are fractional then select that
non-integral variable which contain the largest fractional part.
Introducing the slack variable say xo. obtain the Gomory's
constraint equation
- ∑ fijxj + xG1 = —fBi
jER
Step 7 : Add the Gomory's constraint equation at the bottom of the
Optimal simplex table obtained in step (4). Thus, the solution in the
33
table will be
infeasible optimal solution as -Fbi < 0 and j ≤0, V j. Now use dual
simplex method to change the infeasible solution to feasible optimum
solution. Here the slack variable xG1 will be taken as the first leaving
basic variable in the above table.
Step 8 : Test the integrability of the optimum feasible solution obtained
in step 7.
Now again there are two possibilities.
(a) The optimum solution obtained in step 7 have all integral values,
then the required solution is attained.
(b) The optimum solution does not have all integral values. In this case
repeat step 6 to step 8. until the required optimum solution is
obtained.
34
d. FLOW CHART OF GOMORY’S
ALL I.P.P. ALGORITHM
Reformulate the
given I.P.P. as a
standard
maximization I.P.P.
Modify the simplex table
by adding one more row
and use dual simplex
method to obtain the
optimum solution
treating the Gomorian
slack variable as the
starting leaving variable.
Write down the constraints
equation corresponding to
this variable. Find the
Gomorian constraints and
add the Gomorian slack
variable to the current set
of basic variables.
Ignoring the integer
constraints solve the
corresponding L.P.P. by usual
simplex method
Does this
optimum basic
solution satisfy
the integer
constraints?
no
Determine that basic
variables which has
the largest fractional
part in its current
solution value.
yes
The current basic
solution is the
required optimum
integer solution.
35
EXAMPLES
e. Example 1 : Solve the following L.P.P. by Gomoiy technique.
Maximize, Z = 3x2,
subject to the constraints
3x1 + 2x2 ≤ 7
x1 — x2 ≤ -2
x1, x2 ≥ 0 and are integers.
Solution : We shall solve this example stepwise, so that the students
may understand the procedure.
Step 1 : The problem is of maximization.
Step 2 : Making all the bi's positive the constraints reduce to
3x1 + 2x2 ≤ 7
-X1 + x2 ≤ 2
Step 3 : Now the inequalities are converted to equalities by the
introduction of slack variables that is X 3 and X4 which are as
36
follows.
3X1 + 2X2 + X3 = 7
X1 + x2 + x4
=2
Step 4 : Now we solve the given L.P.P by simplex method,
ignoring the integer condition of the variables. All
computation work is shown in the following table.
37
Thus, the Optimum solution obtained is
X1= 3/5, x2 = 13/5, Z = 39/5
Step 5 : Since the optimum solution obtained above does not
have all integer values, we proceed to the next step.
Step 6 : Construction of the first Gomory constraint.
Since the fraction parts in the value of x1, x2 are each
equal to 3/5, we select at random any one of these. Let
us choose the X1 = XB1
row, i. e., the first row of the last part of optimum
simplex table.
Here i= 1, m = 2, n = 4,
putting these values in (2) of article. The corresponding
Gomory
constraint is given by
38
-∑ fij xj ≤ - Fb1
jER
…(1)
Hence, from the optimum Simplex table, R = {3, 4}
XB1= 3/5
Fb1. = 3/5,
Y13 = 1/5
and y14 = - 2/5 = - 1 + 3/5
f13 = 1/5
and
f14 =
3/5.
Substituting in (1) the first Gomory constraint is*
—f13x3 — f14x4 ≤ — fbi
or - 1/5x3 -3/5x4 ≤ -3/5
Adding the non-negative slack variable Xg1, the corresponding
Gomory Constraint equation is given by
— (1/5)x3 — (3/5)x4 + xG1 = — 3/5
Step 7 : Adding the above new constraint in the optimum simplex table,
we get the following table.
39
Since here xG1 = — 3/5 < 0. Therefore the solution given by above table
Is not feasible.
Now proceed by using dual simplex algorithm.
Taking Leaving Vector as yg1 i.e. , xBr. = xB3
r=3
Another method of finding Gomory Constraint is as follows. Taking the
first row as source row, the corresponding equation is
1/5x3 + 0. x2 +1/5x3-2/5x4 =3/5
Or
X1+1/5x3+(-1+3/5)x4=3/5
Or
1/5x3+3/5x4=3/5+(-x1+x4)
40
Since all variables must have non-negative integral values, therefore the
L.H.S. is non-negative and so the R.H.S. should also be non-negative.
Therefore 1/5x3+3/5x4=3/5+(non negative integer)
Therefore 1/5x3+3/5x4≥3/5
Or
-1/5x3-3/5x4≤ -3/5
To determine the entering vector (a k ).
= Min. {3, 3} k = 3 or 4
Taking k = 3, i. e. , taking Y3 (= a 3) as the entering vector, the revised
Simplex table is
41
Which shows that the optimal feasible solution is an integer valued
Hence, the required solution is
x1 = 0, x2 = 2 and Maximum Z = 6,
Note : Another optimal solution of the problem is
X1= 1, x2 = 2 and maximum Z = 6,
which is obtained by choosing Y4 as the entering vector in the table.
42
f. Example 2 : Manufacturer of baby-dolls makes two types
of
dolls, Doll X and Doll Y. Processing of these two dolls is done
on two machines, A and B. Doll X requires two hours on
machine A and six hours on nrachine B. poll Y requires five
hours on machine A and also five hours on machine B. There
are sixteen hours of time per day available on machine A and
thirty hours on machine B. The profit gained on both the dolls is
same,
i.e., one rupee per doll. What should be the daily production of
each of the two dolls ?
(a) Set up and solve the linear programming problem.
(b) If the optimal solutiOn is not integer-valued, use the Gomory
technique to derive the optimal solution.
Solution : (a) Formulation of the L.P.P.
Let him manufacture x1 and x2 number of dolls of type X and
type Y respectively.
43
Total profit Z = x1 + X2.
The total time required on machine A = 2x1 + 5x2 ≤ 16
and the total time required on machine B = 6x1 + 5x2 ≤ 30
Hence, the required L.P.P is
Maximize, Z = xl + x2
subject to 2x1 + 5x2 ≤16
6x1 + 5x2 ≤ 30
and x1, x2≥ 0
Solution of the L.P.P
Here b1 and b2 are positive and the problem is of maximization.
Introducing the non-negative slack variables x3, x4 the given
inequalities reduce to the equalities.
2X1+ 5x2 + x3 = 16
x1 + 5x2 + x4 = 30
44
Solving the L.P.P. by simplex method, all computations work is
shown in the following table.
Thus, the optimum solution of the given L.P.P. is
x1 = 7/2 = 7/2, x2 = 9/5 =9/5 and . max. Z = 53/10
(b) In the above solution both x1 and x2 are fractional, and their
fractional parts are 1/2 and 4/5. Out of these two fractional parts
4/5 of x2 = xBR = xB1 is
maximum which lie in the first row of the last part of the above
table.
45
Taking the first row as the source row, the corresponding
equation is
0. x1 + 1.x2 + (3/10). x3 — (1/10). x4 = 9/5
Or X2 + (3/10) x3 + {— 1 + (9/10)} x4 = 1 + 4/5
Or (3/10) x3 + (9/10)x4 = 4/5 + (1 — x2 + x4) = 4/5 + (Nonnegative integer)
Since L.H.S. is non-negative and so R.H.S. is also non-negative.
Since L.H.S. is non-negative and so R.H.S. is also non-negative.
(3/10)x3 + (9/10) x4≥ 4/5
Or — (3/10)x3 — (9/10)x4 ≤ -4/5
which is the Gomory constraint.
Adding the non-negative slack variable xg1, the corresponding
Gomory constraint equation is
- (3/10) x3 - (9/10) x4 + xG1 = - 4/5
Now adding the above new constraint in the last optimum
46
simplex table, we get following table.
Since here xG1= - 4/ 5 < 0, the solution given by above table is
not feasible.
Hence, now we proceed by using dual simplex algorithm.
Taking leaving vector as YG1 i. e., x BR=XB3 therefore r = 3
To determine entering vector (a k ).
47
Taking k = 4, i.e., taking Y4 = {α 4} as the entering vector the revised
Simplex table is
Thus the solution is x1 = 59/18 = 3 + 5/18,
x2 = 17/9 = 1 + 8/9, and Max. Z = 31/6
48
Since this solution is also non-integral.
we insert one more Gomory constraint.
Here maximum fractional part is 8/9 of x2 = xbr. = xb1 which lie
in the first row of above table.
Taking the first row as source row, the corresponding equation
is
0.x1 +1.x2 + 1/3 x3 + O. x4 — 1/9xg1 = 17/9
or x2 + 3x3 + (-1 + 8/9) xG1 = 1 + 8/9
or 1/3 x3 + 8/9xg1 = 8/9 + (1 — x2 + xGi ) =8/9+ (Non-negative
quantity)
Since L.H.S. is non-negative, so R.H.S. is also non-negative.
Or 1/3x3+8/9xg1≥8/9
Or —1/3x3 – 8/9Xg1 ≤ -8/9
or — 1/3X3 — 8/9Xg1 +XG2=-8/9
where xG2 is Ron-negative slack variable.
Adding the above new constraint in the table, we get the
49
following table.
Here XG2 = — 8/9, < 0, the solution given by the above table is not
feasible.
Taking YG2 as the leaving vector, xBr = X B4, therefore r = 4, the entering
vector is
αk , such that
therefore k = 3
i. e., Y3 is the entering vector. Entering Y3, in place of YG, , the revised simplex
50
table is
This solution x1 = 25/6 = 4+ 1/6, x2 = 1, x3 = 8/3 = 2+ 2/3
is also non-integral.
we insert one more Gomory constraint.
since maximum fractional part is 2/3 of x3 = xbr. = xb4
which lie in the fourth
row of the last table.
Taking the fourth row as source row in table.
51
Corresponding equation is
0. x1 + 0.x2 + 1.x3 + 0x4 + (8/ 3) xg1 = 3xG2 = 8/3
Or x3 + (2 + 2/3) xg1- 3xG2 = 2 + 2/3
Or (2/3) xg1 = 2/3 + (2 — x3 — 2xG1 + 3xG2 )
= 2/3 +(non-negative quantity)
Since L.H.S. is non-negative so R.H.S. is also nonnegative.
Or (2/3)xG1 ≥2/3
Or — (2/3)xGI ≤ — 2/3
Or -(2/3)xg1 + xG3 = — 2/3
where xG3 is non-negative slack variable.
Adding the above constraint in the last table, we get the
following table.
52
Here xG3 = — 2/3 < 0, therefore the solution given in table is
not feasible.
Taking Yes-as the leaving vector
Therefore X Br =XB5
r = 5, the entering vector is αk , such that
K=G1=5
53
i. e., YG1 is the entering vector, hence the revised simplex table is as
follows.
From this table, the optiniial, integral solution of the given
problem is
xl = 3, x2 = 2 and Max. Z = Rs. 5
i. e., the manufacturer must manufacture 3 dolls of type X and 2
dolls of type Y
then his maximum profit will be Rs. 5.
54
Note : In this last table we have delta3 = 0, which implies that
an other optimal solution also exist. Choosing y3 (=α 3 ) as the
entering vector in place of Y4 (= α 4) in the table we get another
solution.
X1 = 5, x2 = 0, Max. Z = Rs. 5.
This can also be verified by graphical method.
55
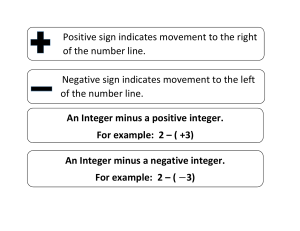
g. Graphical Interpretation of Cutting Plane
Method
The shaded area shown by dots is the permissible region for the values
of x1, x2. Z is maximum at the point P (3/5, 13/5).
The solution of the given problem, ignoring the integer values of
x1, x2 is
x1 = 3/5, x2 = 13/5 and Max. Z = 39/5
56
• To find the integer value solution, we add the following
constraint known as Gomory constraint.
-1/5x3-3/5 x4≤ -3/5
Or x3 + 3x4≥ 3
(see step 6)
—(1)
Adding the non-zero slack variables x3, x4 the given inequalities
educe to the following equalities
3x1 + 2x2 + x3 = 7 and — x1 + x2 + x4 = 2
giving x3 = 7 — 3x1 — 2x2 and X4 = 2+ x1 — X2
Substituting in (1), the Gomory constraint in terms of x1 and x2
is given by
(7 — 3x1 — 2x2 ) + 3 (2 +x1 — x2 )≥ 3 .
Or x2 ≤ 2.
Drawing the line x2 = 2, the above feasible region is cut off to
the shaded region shown by the dots and cross (x) together.
Thus the required optimal inter valued solution is
57
0, x2 = 2
and
max. Z = 6
or x1 = 1, x2 = 2
and
max. Z = 6
58
h.
Application of Gomory’s plane
cutting method
The cutting plane method is commonly used for
solving ILP and MILP problems to find integer
solution, by solving the linear relaxation of the
given integer programming model, which is a
non integer LP model .
59
I. ADVANTAGE
Gomorys cuts are very effectively generated
from a simplex tableau whereas many other
types of cuts are either expensive or even NP
hard to separate. Among other general cuts for
MLP, most notably lift and project dominates
Gomory cuts.
60
CONCLUSION :
Following completion of this free openlearn
course ,linear programming -the basic ideas ,you
sould find that your skills in finding a solution
to a linear programming problem and
interpreting the result in terms of the original
problem are improving.
you should now be able to:
1. Formulate a given simplified description
of a suitable real-world problem as a linear
programming model in general,standard
and canonical forms
2. Sketch a graphical representation of a twodimensional linear programming model
given in general,standard or canonical
form.
3. Classify a two dimensional linear
programming model by the type of its
solution.
4. Solve a two dimensional linear
programming problem graphically.
61
5. Use the above method to solve small
linear programming models by hand,
given a basic feasible point.
This free openlearn course is an extract
form.
62
Reference
1.S.D Sharma,operation research, KNRN
publication.
2. H.A. Taha,operation research.
3.R.K. Gupta,operational research, Krishna
publication.
4. Operational research by JK Sharma.
5. Wikipedia-en.m.wikipwdia.org
6. www.google.com