Hydraulics I and Hydraulics II Notes
Chapter 1
1.0. INTRODUCTION
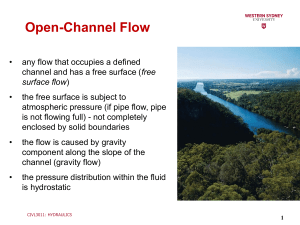
1.1 What is hydraulics?
ydraulics is derived from a Greek Word " Hydraulikos" which means water. It is
the study of water and some engineering fluids, which a hydraulic/civil engineer
is called upon to store, convey or pump. Engineering fluid includes wastewater in
waste disposal and oils in hydraulic control gear.
Mechanics
Rigid body
body
mechanics
Mechanics
Deformable body
Mechanics
mechanics
Fluid
Mechanics
Incompressible
(Liquids like water)
Hydromechanics
Hydrostatics
Hydro kinematics
Compressible
(Gases like air)
Aeromechanics
Hydrodynamics
Aerostatics
Aerodynamics
Hydraulics is often confused with the allied science of fluid mechanics because a
considerable overlap occurs between the two studies. However, fluid mechanics deals
with gases, as well as the common liquids, and to most hydraulic/civil engineers a study
of gas behavior is irrelevant to their professional needs.
The basic aim of hydraulics is to understand and control the occurrence, movement and
use of water for the benefit of society whether it is in lakes, rivers, pipes, drains,
percolating through soils or pounding the coastline as destructive waves. Therefore, the
Arba Minch University WTI Leacture Notes Prepared Otoma 1
Hydraulics I and Hydraulics II Notes
fundamentals in hydraulic engineering systems involve the application of engineering
principles and methods to the planning, control, transportation, conservation, and
utilization of water.
1.2 Why do we study hydraulics?
All organized societies need adequate water supplies, drainage to dispose of waste or
excess water, as well as protection from uncontrolled water. Thus an obvious necessity
for a study of hydraulics exists.
Applications of hydraulics include
Design of a wide range of hydraulic structures (dams, canals, weirs etc.) and
machinery (pumps, turbines and fluid couplings)
Design of a complex network of pumping and pipelines for transporting liquids.
Power generation
Flood protection
Surface and ground water studies
Flow metering like orifice meter
Pressure measurement
1.3 The development of Hydraulics
1. Ancient times (Before 500 BC)
Archeological discoveries have shown that canals, dams, reservoirs and devices for
lifting water existed in Egypt, China and Babylon for irrigation and defense purposes.
(That is, irrigation is the earliest form of hydraulics.) The design of these works was
based on experience and simple trial and error. As a result, major hydraulic projects were
something of a gamble, successful/fail.
2. Greek Civilization (500 BC - 100 BC)
The Greeks understood some elementary theories and collected enough information to
divide hydraulics into hydrostatics and hydrodynamics. They were imaginative
innovators.
Ex: Archimedes established elementary principles of buoyancy and floatation, which is
true still today.
3. Roman empire (The empire covered much of Europe, Asia, & Northern Africa)
Numerous public water supply schemes drainage works and bridges were undertaken
many of which still stand today. The Romans advanced the practice of the art, but they
did little or nothing to promote the fundamental fluid behavior. They lacked deep
understanding of the science. Ex Method of water charging for private water supplies
were based on the pipe size. They were skillful adaptors/competent appliers of
hydraulics.
4. The Dark Age (A.D. 500-1500) during the dark age (middle age) little real progress
occurred.
5. Renaissance -16th century
For the first time it became common for intelligent men to improve their understanding
by conducting experiments (experimental approach).
Ex Leonardo do Vinci (Italian genius) sketched and commented upon many hydraulic
phenomena. (Profile of free jet, hydraulic jump etc.)
6.
18th & 19th century
Arba Minch University WTI Leacture Notes Prepared Otoma 2
Hydraulics I and Hydraulics II Notes
The growth of experimental knowledge combined with a renewed interest in
mathematical analysis by such workers as Newton, Pascal and Descartes, led to the
start of a well-established hydrodynamic theory. The progress of hydraulics in this
period was along two largely independent paths, hydrodynamics and experimental
hydraulics. Hydrodynamics was the term associated with the theoretical or mathematical
study of idealized, frictionless fluid behavior, with the term hydraulics being used to
describe the applied or experimental aspects of real fluid behavior, particularly the
behavior of water. Further contributions and refinements were made to both theoretical
hydrodynamics and experimental hydraulics during the nineteenth century, with the
general differential equations describing fluid motions that are used in fluid mechanics
being developed in this period. Experimental hydraulics became more of a science, and
many of the results of the experiments performed during the nineteen century are still
used today.
7. 20th Century
At the beginning of the twentieth century both the fields of theoretical hydrodynamics
and experimental hydraulics were highly developed, and attempts were made to unify the
two. Prandtl’s (German professor) convincing theory, published in 1904, for the behavior
of turbulent flow past a solid boundary laid the foundation for the present unified
approach known as fluid mechanics.
Our fleeting journey through the history of hydraulics deliberately stops short at this
point, because a discussion of the present rightly belongs to the course, which follows.
What does the future hold?
It is dangerous and presumptuous to predict the forth-coming fruits of research. Suffice it
to say that there are many gaps in our knowledge. Improved instrumentation techniques
(electronic gadgetry) and mathematical tools (computers) have become available, so there
will be a continuing and possibly exciting advancement in the years that lie ahead.
Chapter – 2
2.0. Fluid Properties
2.1 General Description
Matter can be distinguished by the physical form of its existence (phases) as solid, liquid
and gases, for example water appears in liquid, solid (Snow and ice), or gaseous
(moisture or water vapor) form depending on the extent of hydrogen bonding. Liquid and
gaseous phases are usually combined and given a common name of fluid.
Exercise: Distinguish solid, liquid and gas.
Definitions
Fluids: Fluids are substances, which deform continuously under the application of a
shear force, no matter how small the force might be. They are characterized by their
ability to flow.
(Shear force = force component tangent to a surface. This force divided by the area =
average shear stress).
Properties: intensive, extensive, physical and chemical.
Every fluid has certain characteristics by which its physical condition may be described.
We call such characteristics properties of the fluid. These properties can be divided in to
two broad categories: Extensive properties, which depend on the size of a sample of
Arba Minch University WTI Leacture Notes Prepared Otoma 3
Hydraulics I and Hydraulics II Notes
matter; and intensive properties, which are independent of the sample size. Of the two
intensive properties are the more useful because a fluid will exhibit the same intensive
property regardless of how much of it we examine. Examples of extensive property are
mass and volume as the amount of a substance increases; its mass and volume also
increase. Intensive properties include density, pressure and temperature.
In speaking of the properties of fluids, we also distinguish between physical and chemical
properties. A physical property can be specified without reference to any other fluid.
Density, mass volume, color etc. are all examples of physical properties. A chemical
property on the other hand states some interaction between chemical substances.
The way fluid (water) behaves under various conditions encountered in practice depends
primarily on its fundamental and physical properties, which are briefed as follows.
2.2 Physical Properties
An understanding of fluid behavior and application of its basic laws through
experimentation advances the subject of hydraulics. Fluid properties play principal roles
both in open channel and pipe flow.
The principal physical properties of fluids are described as follows.
1. Density
There are three forms of density
a. Mass density or density, denoted by (Greek, rho)
It is defined as the mass per unit volume.
Mass of fluid (m)
m
,
Volume occupied (v)
v
3
SI unit Kg/ m
Dimensionally ML-3
For an incompressible fluid, ‘’ is constant
For water, is 1000 kg/ m3 at 40 c and standard pressure (760 –mm Hg)
(There is a slight decrease in density with increasing temperature, but for
normal practical purposes the value is constant)
Generally, the density of liquids is only slightly dependent on either
temperature or pressure and the variation can be ignored but for gases, it
significantly varies with both temperature and pressure.
Specific weight / unit weight / unit gravity force /, designated by (Gk, gamma)
It is defined as the weight per unit volume.
or density =
b.
W
mg
g
V
v
g
W = weight = mass x gravitational acceleration (g)
SI unit N/m3 (usually KN/ m3)
Dimensionally (ML –2 T-2)
At 40c ‘’ for water is 9.806 / 9.81 KN /m3/
It changes with location on the earth’s surface depending upon g.
Arba Minch University WTI Leacture Notes Prepared Otoma 4
Hydraulics I and Hydraulics II Notes
c.
Specific gravity (S) or relative density (rl. dn.)
It is defined as the ratio of mass of a body to mass of an equal volume of a substance
taken as a standard (for liquids water at 40 c)
mass of fluid
mass of equal volume of water
density of fluid
density of water
It is a pure no (dimensionless parameter)
Typical values of specific gravities:
Relative density of water is100(S water = 1.00, standard for measuring
relative density of other liquids).
S mercury
= 13.6, commonly used secondary fluid in manometers for
pressure measurement.
Oils usually have a relative density less than one and they float on water.
If relative density of a given oil is 0.8 its density is 0.8 (1000 kg / m3) = 800
kg/ m3
Note:
It is clear that density, specific weight, and specific gravity are all interrelated
and from knowledge of any one of the three the others can be calculated.
2. Specific Volume (Vs)
It is the volume occupied by a unit mass of fluid or simply the reciprocal of density.
Re lative density
v
1
m
Commonly applied to gases
3. Bulk modulus of elasticity or Compressibility, K (kappa)
For most practical purposes liquids may be regarded as incompressible. However, there
are certain cases, such as water hammer, where the compressibility should be taken into
account. If water were not compressible, then closing a valve on a pipeline could be a
dangerous task. Imagine trying to stop suddenly a solid column of water several
kilometers long. The force involved would be immense. Fortunately, water is
compressible and compresses like a spring to absorb the energy of the impact as the valve
is closed. Water hammer pressures are quite large. Therefore, engineers must design
piping systems to keep the pressure within acceptable limits. This is done by
Installing an accumulator near the valve and/or operating the valve in such a
way that rapid closure is prevented. Accumulators may be in the form of air
chambers for relatively small systems, or surge tanks.
Installing pressure-relief valves at critical points in the pipe system.
Analysis of water hammer is beyond the scope of this course.
If the pressure of a volume of fluid is increased by dp, it will cause a volume decrease dv,
then the bulk modulus of elasticity is defined as
Vs
Arba Minch University WTI Leacture Notes Prepared Otoma 5
Hydraulics I and Hydraulics II Notes
Bulk modulus (K) = (stress=change in pressure) / (volumetric strain)
K
= -
dp
dv / v
v = original fluid volume
The negative sign indicates a decrease in volume with the increase in pressure.
= m/v
Mass of a certain volume is constant, differentiating .
dv
m dv
dv
m
1
d d md m 2
v
v v
v
v
v
d
dv
v
dp
d /
The concept of the bulk modulus is mainly applied to liquids, since for gases
the compressibility is so great that the value of K is not a constant
For water, k is approximately 2150 N/ mm2 at normal temperatures and
pressures.
For steel k = 215000 N/ mm2 (i.e. water is 100 times more compressible
than steel)
4. Absolute / (Dynamic) Viscosity ( = mu)
The resistance to flow because of internal friction is called viscous resistance and the
property, which enables the fluid to offer resistance to relative motion between adjacent
layers, is called the viscosity of liquid. It is a measure of resistance to tangential or shear
stress and arises from the interaction and cohesion of fluid molecules.
The liquid molecules are closely spaced, with strong cohesive forces between molecules,
and the resistance to relative motion between adjacent layers of fluid is related to these
intermolecular forces. As the temperature increases, the cohesive forces are reduced with
a corresponding reduction in resistance to motion, since viscosity is an index of this
resistance, it follows that the viscosity is reduced by an increase in temperature.
A gas, on the other hand, has very small cohesive forces. Most of its resistance to shear
stress is the result of molecular interaction. As the temperature of the gas increases, the
random molecular activity increases hence viscosity increases with temperature.
The effect of temperature on viscosity is approximated by
for gases
CT 3/ 2
C and S empirical constant
T S
Substituting: k
Arba Minch University WTI Leacture Notes Prepared Otoma 6
Hydraulics I and Hydraulics II Notes
(Sutherland equation)
for liquids
D eB / T
D and B constant, T=absolute temperature
(Andrade’s equation)
Consider a fluid confined between two plates which are situated a very short distance yapart. The lower plate is stationary whilst the upper plate is moving at a velocity v.
Hence; the fluid in immediate contact with the moving plate has a velocity v and with the
stationary plate has zero velocity. (The experimental observation that the fluid “sticks” to
the solid boundary is very important one in fluid mechanics and is usually referred to as
the no slip condition. All fluids satisfy this condition.)
V
F
Y
F
A
y
Fixed plate
F is the force required to move the surface at constant velocity.
Fig. Viscous deformation
If distance y and velocity V are not great, the velocity variation (gradient) will be a
straight line. Experiments show that, F is directly proportional to A and V and inversely
proportional to thickness Y.
- Similarity of triangles
F
or
AV
dv
A
Y
dy
F
dv
A
dy
v
dv
y
dy
- A = area of upper plate
F
A
(tau) = shear stress
dv
dy
If a proportionality constant , called absolute (dynamic) viscosity, is introduced.
Arba Minch University WTI Leacture Notes Prepared Otoma 7
Hydraulics I and Hydraulics II Notes
dv
dy
or
dv
dy
This expression was first postulated by Newton and is known as Newton’s equation of
viscosity.
Heavy oils have greater viscosity than water and water is more viscous than
air.
All real fluids posses' viscosity, though to varying degrees.
There can be no shear stress in a fluid, which is at rest
The SI unit of is N.s /m2or Pa.s (kg/ m.s),
gm
Or in cgs system
termed as poise
cm.s
One poise = 0.1 kg m-1 s-1 = 0.1 Pa.s
Dimensionally = (ML-1 T-1) (FL-2 T)
In many problems concerning fluid motion the viscosity appears in the form of /p and it
is convenient to employ a single term (nu), known as kinematic viscosity, and so called
because the units mm2/s (L2T-1) is independent of force.
Kinematic viscosity =
absolute vis cos ity ( )
i.e
mass density ( )
SI unit of is m2/s in cgs system cm2/s called stoke.
For water, = 1.14 mm2/s at 150c
For heavy air may be as high as 900mm2/s.
Viscosities (absolute of dynamic) of liquids decrease with increasing
temperature but are not affected appreciably by pressure changes.
Determination of viscosity
The following methods may be employed to determine the viscosity of liquid
I. Capillary Tube (Reading exercise)
II. Sphere Resistance (attend the experimental demonstration)
III. Rotating cylinder (see example no 7)
Viscometer
It is an instrument to measure viscosity. It measures some quantity which is a function of
viscosity. The quantity measured is usually the time taken to pass a certain volume of
liquid through an orifice fitted in the bottom of viscometer. The temperature of liquid
while it is being passed through the orifice should be maintained constant.
Newtonian and Non - Newtonian fluids
Fluids are classified as Newtonian or non - Newtonian.
A fluid, which obeys Newton’s law of viscosity, is known as a Newtonian fluid and they
will have a certain constant viscosity. For these fluids the plotting of shear stress against
Arba Minch University WTI Leacture Notes Prepared Otoma 8
Hydraulics I and Hydraulics II Notes
velocity gradient is a straight line passing through the origin. The slope of the line gives
viscosity.
Ex Newtonian fluid = water, air, gasoline and light oils. (Under normal condition)
In a non- Newtonian fluid there is a non -linear relation between the magnitude of applied
shear stress and the rate of angular deformation.
Ex: non - Newtonian fluid: human blood, butter, printers ink etc….
Gases and most common liquids tend to be Newtonian.
Newtonian and Non - Newtonian fluids are real fluid.
Ideal fluid
For purposes of analysis, the assumption is frequently made that a fluid is non -viscous
(frictionless) and incompressible (inelastic). Such an imaginary fluid is called ideal or
perfect fluid.
Ideal fluids with zero viscosity always have zero stress and hence the plotting coincides
with the x -axis.
No real fluid fully complies with this concept, but some liquids, including water, are near
to an ideal fluid and the assumption is useful and justified.
Ideal solid
No deformation will occur under any loading condition, and the plotting coincides with
the y -axis. Real solids have some deformation; with in the proportional limit (Hooke’s
law) the plotting is straight line, which is almost vertical.
Ideal plastic
Sustain a certain amount of shearing stress without deformation and thereafter it would
deform in proportion to the shearing stress. If not proportion they are called thixotropic
fluid.
Ideal plastic
Ideal solid
Non-Newtonian
Newtonian
Shear stress,
Slope=
dv/dy
Ideal fluid
Velocity gradient (rate of deformation), dv/dy
Fig. Plot of versus dv/dy
5.
Surface tension denoted by (Gk. Sigma)
Arba Minch University WTI Leacture Notes Prepared Otoma 9
Hydraulics I and Hydraulics II Notes
Considering the behavior of molecules at the interior & along the surface of a fluid mass
can give us a clear understanding of surface phenomena. Take molecules in the interior of
a fluid mass. They are under attractive forces in all directions and the vector sum of these
forces is zero. However, at the surface between liquid and air or two immiscible liquids
the upward and downward attraction are unbalanced (acted on by a net in ward cohesive
force that is perpendicular to the surface) which causes the surface to behave as if it were
a ‘skin’ or elastic membrane stretched over the fluid mass giving rise to the phenomenon
of surface tension. Actually such a skin doesn’t present, but this conceptual analogy
allows as to explain several commonly observed phenomena. This is demonstrated
schematically in the following figure for water with a free surface.
Air
Water
Fig. Surface tension due to molecular attraction.
Generally surface tension is a force, which exists on the surface of a liquid when it is in
contact with another fluid or a solid boundary. Its magnitude depends up on nature of the
liquid, and the surrounding matter which may be a solid, liquid or a gas, Kinetic energy
and hence the temperature of liquid molecules (or the relative magnitude of cohesive and
adhesive forces.)
Surface tension effect enables:
An isolated drop of liquid to take nearly a spherical shape.
A drop of water to be held in suspension at a tap.
Birds to drink water from ponds.
A vessel to be filled slightly above the brim.
Dust particles and needle to float on the surface of liquids.
Capillary rise and depression in thin-bored tubes.
Capillarity or meniscus effect
When a tube of small diameter called capillary tube is inserted in to a container of liquid,
the level will rise or fall within the tube depending up on the relative magnitudes of the
cohesion of the liquid and the adhesion of the liquid to the wall of the containing vessel.
Liquids rise in tubes they wet (adhesion > cohesion) and fall in tubes they do not wet
(cohesion > adhesion) see the following figure.
Arba Minch University WTI Leacture Notes Prepared Otoma 10
Hydraulics I and Hydraulics II Notes
The phenomenon of rise and fall of liquid in a capillary tube is known as capillarity.
Capillarity is important in capillary tubes, monometer or open pores in the soil. (Tubes
10 mm diameter).
B
A
C
D
h
Fig. A) Rise of column of liquid for wetting liquid b) depression of column for nonwetting liquid.
The magnitude of the capillary rise (or depression), h, is determined by the balance of
adhesive force between the liquid and solid surface and the weight of the liquid column
above (or below) the liquid free surface.
For Fig a The gravitational force on the column of liquid elevated must be supported by
surface tension acting around the periphery of the tube.
Fy 0
Component of forces
due to surface tension
4 cos
4 cos
h =
gd
d
= weight of volume
(ABCD) neglecting pressure forces.
4 cos
h=
d
It is to be noted that for 0 900 h is positive (concave meniscus and capillary rise)
and that for 90 1800 h is negative (convex meniscus and capillary depression).
For pure water and clean glass = 00
6 for water = 0.0735 N/m
In case of liquid drop or inside a jet, the action of surface tension is to increase the
internal pressure
For a liquid droplet
Arba Minch University WTI Leacture Notes Prepared Otoma 11
Hydraulics I and Hydraulics II Notes
Considering force balance on a hemispherical drop, it is possible to equate the change in
pressure (which is trying to blow apart the two hemispheres) and the surface tension
(which is trying to pull them together).See the following figure
Therefore, p d2/4 = d
p=4/d
P
Fig. Pressure in a sphere due to surface tension
Exercise:
Similarly show that p=2/d and 8/d for jet of water and soap bubble respectively.
6. Vapor pressure
The vapor pressure of a liquid is the (generally small) pressure at which the liquid
vaporizes or boils as it changes from the liquid to the gaseous or vapor state. The vapor
pressure is strongly dependent on temperature. Water boils at atmospheric pressure when
the temperature is 1000c and at higher elevations the atmospheric pressure is less; hence,
water evaporates at temperatures lower than 1000C. This property usually has no effect
on a fluid flow; however, if a flowing liquid experiences a pressure at any point, which
lowers the pressure locally to the vapor pressure for that temperature, then this
vaporization, will take place. In problems involving siphoning, the result of pressure
reduction to the vapor point will be to break the siphon and interrupt the flow. In other
cases, the flow will continue, altered in form, as the phenomenon of cavitation occurs.
Cavitation is the rapid formation and collapse of small vapor bubbles, which are not only
disruptive, but are also frequently destructive as well. This subject will be treated more
fully in other courses.
Illustrative Examples
1. The density of a substance is 2.94 g/cm3. What is it’s
a) Specific gravity
b) Specific volume
c) Specific weight
2. Two liquids of specific gravities 1.25 and 0.75 and volumes of 0.01 and 0.006m 3
respectively are mixed. If the bulk of the liquid shrinks by 1% on mixing, calculate
the density and specific gravity of the mixture.
3. A reservoir contains a two-component mixture of water and sediment. The water
density is and the density of the sediment particles is s. Assuming complete
mixing find the density of the mixture, m, if the mass fraction of the sediment is s.
Arba Minch University WTI Leacture Notes Prepared Otoma 12
Hydraulics I and Hydraulics II Notes
4. For K=2.2GPa (bulk modulus of elasticity of water), what pressure is required to
reduce its volume by 0.5%?
5. Eight kilometers below the surface of the ocean the pressure is 82Mpa. Determine the
density of the seawater at this depth if the density at the surface is 1025kg/m 3 and the
average bulk modulus of elasticity is 2.3GPa.
2
2
6. If the velocity distribution over a plate is given by v y y in which v is the
3
velocity in m/s at a distance y meters above the plate, determine the shear stress at
y=0 and y=0.15m. Take =1.015x10-3m2/s and s=0.85.
7. A lubricated shaft of 200mm radius rotates inside a concentric sleeve bearing of
205mm radius. Determine the viscosity of the fluid, which fills the space between the
sleeve and the shaft if a torque of 1.5N.m is required to maintain an angular velocity
of 120rpm.take length of sleeve as 450mm.
8. A large movable plate is located between two large fixed plates as shown in fig.
below. Two Newtonian fluids having the viscosities indicated are contained between
the plates Determine the magnitude and direction of the shearing stresses that act on
the fixed walls when the moving plate has a velocity of 4m/s as shown. Assume that
the velocity distribution between the plates is linear.
9. Classify the substance that has the following rates of deformation and corresponding
shear stresses:
Dv/dy,s0
0.3
0.6
0.9
1.2
0
2
4
6
8
,KPa
10. A small circular jet of mercury 0.1mm in diameter issues from an opening. What is
the pressure difference between the inside and outside of the jet at 200c.
11. The diameter of two glass limbs of a differential U tube manometer was found to be
2mm and 3mm respectively. The tube is kept vertically and partially filled with water
of surface tension 0.0735N/m and zero contact angle. Calculate the difference in
levels of water in the two limbs caused by surface tension effect.
Assignment-I on Fluid Properties
1. Three different types of liquids having volumesV1, V2 andV3 and specific gravities S1,
S2 and S3 respectively are mixed. If the bulk of the liquid shrinks by 1% on mixing,
express the specific gravity of the mixture in terms of volumes and relative densities.
2. The variation in the density of water,, with temperature, T, in the range
20cT5Oc is given in the following table.
Density (kg/m3)
998.2 997.1 995.7 994.1 992.2 990.2 988.1
25
30
35
40
45
50
Temperature (c) 20
Arba Minch University WTI Leacture Notes Prepared Otoma 13
Hydraulics I and Hydraulics II Notes
Use these data to determine an empirical equation of the form =C1+C2T+C3T2 which can
be used to predict the density over the range indicated. Compare the predicted values with
the data given. What is the density of water at 37.5C? Hint: Use Q- Regression.
3. A steel container expands in volume 1% when the pressure within it is increased by
70Mpa. At standard pressure, it holds 8kg of water; =1000kg/m3. For K=2.05Gpa,
when it is filled, how many kilograms of water must be added to increase the pressure
to 70Mpa (gage)?
4. A 196.2N cubical block, having 20 cm edge, slides down an inclined plane making an
angle of 200 with the horizontal on which there is a thin film of oil having a viscosity of
2.16*103Ns/m2. What terminal velocity the block will attain, if the film thickness is
estimated to be 0.025mm?
5. A very large thin plate is centered in a gap of width 6cm with different oils of unknown
viscosities above and below, the viscosity of one being twice that of the other. When
the plate is pulled at a velocity of 30cm/sec, the resulting force on one square meter of
plate due to viscous shear on both sides is 29.4N. Assuming viscous flow and
neglecting all end effects, calculate viscosities of the oils in poise.
6. The side and bottom space of two concentric cylinders is filled with fluid. The outer
cylinder is rotated at a speed of 200 rpm and a torque of 2.5N-m is required to maintain
this speed. The inner cylinder, which is suspended by a torsion wire, will remain
stationary. Neglecting end effects, determine the fluid viscosity. (See the figure).
5mm
20cm
20
cm
25cm
5mm
=200 r.p.m
Fluid
7. In the figure, oil of viscosity fills the small gap of thickness y. Determine an
expression for the torque T required to rotate the truncated cone at a constant speed .
Neglect fluid stress exerted on the circular bottom.
b
y
a
Arba Minch University WTI Leacture Notes Prepared Otoma 14
Hydraulics I and Hydraulics II Notes
8.
Classify the following substances, and find the viscosities and yield stresses if they
have.
dv/dy,s-1
, kpa
(a)
dv/dy,s-1
, Kpa
0
0
0
0
1
2
1
0
2
3
2
0
dv/dy,s-1
,Kpa
3
5
-1
3
0
dv/dy,s
, Kpa
0
10
1
15
(b)
0
2
0
4
2
20
4
30
3
6
5
10
(c)
(d)
9. Calculate the maximum capillary rise of water to be expected
a. In a vertical glass tube 1mm in diameter.
b. In between two concentric glass tubes of radii 4 and 5mm.
Take 6=0.0735N/m
c. In between two vertical, parallel, clean glass plates spaced a distance of 2mm
apart.
10. What force is necessary to lift a thin wire ring 2.5cm in diameter from a water surface
at 200c? Surface tension at 200c is 0.0718 N/m. Neglect the weight of ring.
CHAPTER- THREE
3.0. HYDROSTATICS
INTRODUCTION
Hydrostatics deals with the study of fluids at rest or moving with uniform velocity as a
solid body, so that there is no relative motion between fluid elements (or layers). There is
no shear stress in a fluid at rest. Hence, only normal pressure forces are present in
hydrostatics.
Engineering applications of hydrostatics principles include the study of forces acting on
submerged bodies such as dam faces, gates & others and the analysis of stability of
floating bodies.
OR in other word
Fluid static’s is a branch of hydraulics that deals with fluids (water) at rest. The particles
of fluid are at rest, there is no tangential or shear stress between the fluid particles.
In hydrostatics, all forces act normally to the boundary surface and are independent of
viscosity. The analysis made on hydrostatics is based on straightforward application of
the mechanical principles of forces and moment and exact solution can be obtained
without experimental evidence.
As in solid mechanics we shall build our knowledge by first considering static’s followed
by the more difficult problem of dynamics. Considering Newton’s second law, that is,
d(mv)/dt = 0. This can be achieved either when the fluid velocity is constant or the very
special case where the acceleration is constant everywhere in the flow. The first case is
the case of fluid static’s (the branch of fluid mechanics, which is concerned with fluids at
Arba Minch University WTI Leacture Notes Prepared Otoma 15
Hydraulics I and Hydraulics II Notes
rest), while the latter is the special case of solid body acceleration. The overriding
assumption necessary to achieve these two conditions is that there is no relative motion of
adjacent fluid layers, and consequently the shear stresses are zero. Therefore, only normal
or pressure forces are considered to be acting on the fluid surfaces.
Fluid Pressure
The pressure intensity or more simply the pressure on a surface is the pressure force per
dF
unit area expressed by the relation P
but the force should be applied normal to the
dA
surface.
Pressure at a point
Consider a finite but small element (the small triangular prism) of liquid at rest, acted
upon by the fluid around it. The values of average unit pressures on the three surfaces are
P1, P2 and P3. In the Z direction the forces are equal and opposite and cancel each other.
Y
Pdsdz (Surface force)
Z
Pxdydz
ds
dz
dy
900-
Pydxdz
1/2
X
dx
dxdydz (body force)
Fig.3.1 Definition sketch for normal stress at a point.
Px and Py are the average pressure in the horizontal and vertical directions.
For equilibrium condition,
Fx= 0,
PxdydZ- PdSdZcos = 0
but ds cos =dy
PxdydZ –PdZdy = 0
Px=P
Fy =0
Pydxdz-Pdsdz sin -1/2dxdydz=0
ds sin=dx
Arba Minch University WTI Leacture Notes Prepared Otoma 16
Hydraulics I and Hydraulics II Notes
Pydxdz-Pdxdz -1/2dxdydz=0
Py-P -1/2dy=0 as compared to others dy is small so, 1/2dy is ignored.
Py=P
The pressure force can also consider and it will be the same with others.
P=Pz=PX=Py
As the triangular prism approaches a point, dy approaches zero as a limit and the average
pressures become uniform or even “point pressures”. Then putting dy = 0 in equation, we
obtain p1=p3 and hence p1= p2 = p3. Therefore, the pressure is independent of its
orientation.
3.1 Pressure Distribution PASCAL’s Law
The pressure variation throughout a fluid at rest can be obtained by again applying
Newton’s second law to a differential element such as shown in Fig.3.2. Note that the
pressures shown are all compressive. This, by convention, is defined as positive pressure,
since tensile stresses in fluids are relatively rare. The pressure on the left hand face is
taken as P. If the rate of change of pressure (or pressure gradient) in the x direction is
p/x, then the total change in pressure between the left face and the right face is the rate
of change of pressure times the distance between the two faces, or (p/x) dx.
P(
dP
)dz
dz
z
dz
P(
P
y
x
dxdydz
dP
)dy
dy
dx
dy
P
Fig.3.2 Definition sketch for pressure variation
For fluid element at rest FX=0, Fy=0, Fz=0, the pressure force in the opposite vertical
faces must be equal.
p.dx
Fx 0 p dy dz p
dy dz 0
x
p
0
x
p.dy
dx dz 0
Fy 0 p dx dz p
y
Arba Minch University WTI Leacture Notes Prepared Otoma 17
Hydraulics I and Hydraulics II Notes
p
0
y
The preceding two equations show, respectively, that the pressure does not change in the
x and y directions. Thus, the pressure is constant throughout a horizontal plane.
With reference to Fig.3.2 the vertical direction will now be examined.
Similar to the foregoing procedure, if the pressure on the bottom face is taken as P, the
pressure on the top face becomes p + (P/z) dz.
p
Fz pdx dy p z dz dx dy dx dy dz
0
p
z
It has been shown that p is not a function of x or y. If it is further assumed that the
pressure does not change with time, the relationship may be replaced by the total
differential equation.
dp
dz
From the above equation the pressure variation is not a function of x and y.
This equation can now be integrated to give the actual pressure variation in the vertical
direction. The negative sign indicates that as z gets higher up ward, the pressure gets
smaller. For incompressible fluids, (where = constant) the above equation can be
directly used.
If the fluid can be assumed incompressible so that = constant, this can be integrated to
give
P + z = constant
This expression defines what is often referred to as the hydrostatic pressure variation, in
which the pressure increases linearly with decreasing elevation. The constant of
integration can be absorbed by integrating between two elevations z 1 and z2 with
corresponding pressure P1 and P2,
P2
Z
Z2
P1
Z1
Arba Minch University WTI Leacture Notes Prepared Otoma 18
Hydraulics I and Hydraulics II Notes
Fig.3.3. Pressure relative to the surface of a liquid
P2
Z2
P1
Z1
P Z
P2- P1 = -(z2 - z1) Showing pressure decreases linearly with an increase in
elevation.
Since the pressure at the surface is atmospheric it can be taken to be zero gage pressure.
So, the above expression will be P1 = (z2 - z1) But z2-z1=z and substituting,
P1 = z
And the pressure is proportional to the depth below the free surface. In other words, the
pressure at a point in a stationary liquid is the product of the depth of the point and the
specific weight of the fluid. If a free surface does not exist, for example in a closed
container completely filled with liquid, the above equation can be applied in reverse to
determine the position of a line of zero pressure, provided that the actual pressure is
known at some point in the container.
When water fills a containing vessel, it automatically seeks a horizontal surface upon
which the pressure is constant everywhere. In practice, the free surface of water in vessel
is the surface that is not in contact with the cover of the vessel. Such a surface may be
subjected to the atmospheric pressure (open vessel) or any other pressure that is exerted
in the vessel (closed vessel).
N.B: The pressure in a homogeneous, incompressible fluid at rest depends on the depth
of the fluid relative to some reference plane, and it is not influenced by the size or shape
of the container in which the fluid is held.
3.2 Pressure measurement
Absolute and gage pressures
The pressure at a point within a fluid mass can be designated as either an absolute pressure
or a gage pressure.
In a region such as outer space, which is virtually void of gases, the pressure is essentially
zero. Such a condition can be approached very nearly in a laboratory when a vacuum pump
is used to evacuate a bottle. The pressure in a vacuum is called absolute zero, and all
pressures referenced with respect to this zero pressure are termed absolute pressures.
Many pressure-measuring devices measure not absolute pressure but only difference in
pressure. For example, a Bourdon-tube gage indicates only the difference between the
pressure in the fluid to which it is tapped and the pressure in the atmosphere. In this case,
then, the reference pressure is actually the atmospheric pressure. This type of pressure
reading is called gage pressure. For example, if a pressure of 50 kPa is measured with a
gage referenced to the atmosphere and the atmospheric pressure is 100 kPa, then the
pressure can be expressed as either p = 50 kPa gage or p = 150 kPa absolute.
Whenever atmospheric pressure is used as a reference, the possibility exists that the
pressure thus measured can be either positive or negative. Negative gage pressures are
also termed as vacuum or suction pressures. Hence, if a gage tapped into a tank indicates
Arba Minch University WTI Leacture Notes Prepared Otoma 19
Hydraulics I and Hydraulics II Notes
a vacuum pressure of 31 kPa, this can also be stated as 70 kPa absolute, or -31 kPa gage,
assuming that the atmospheric pressure is 101 kPa absolute.
Water surface in contact with the earth’s atmosphere is subjected to the atmospheric
pressure, which is approximately equal to a 10.33-m- high column at sea level. In still
water, any element located below the water surface is subjected to a pressure greater than
the atmospheric pressure.
Fig.3.4. Graphical representation of gage and absolute pressure.
Measurement of pressure
Since pressure is a very important characteristic of a fluid field, it is not surprising that
numerous devices and techniques are used in its measurement
All the devices designed for measurement of the intensity of hydraulic pressure are based
on either of the two fundamental principles of measurement of pressure: firstly by
balancing the column of liquid (whose pressure is to be found) by the same or another
column of liquid and secondly by balancing the column of liquid by spring or dead
weight.
1. Mercury Barometer
The measurement of atmospheric pressure is usually accomplished with a mercury
barometer, which in its simplest form, consists of a glass tube closed at one end with the
open end immersed in a container of mercury as shown in Fig. The tube is initially filled
with mercury (inverted with its open end up) and then turned upside down (open end down)
with the open end in the container of mercury. The column of mercury will come to an
equilibrium position where its weight plus the force due to the vapor pressure (which
develops in the space above the column) balances the force due to the atmospheric
pressure. Thus,
Patm = h + Pvapor
Where: is the specific weight of mercury. For most practical purposes the contribution
of the vapor pressure can be neglected since it is extremely small at room temperatures
(e.g. 0.173 Pa at 20oC).
Arba Minch University WTI Leacture Notes Prepared Otoma 20
Hydraulics I and Hydraulics II Notes
Pvapor
A
h
Patm
Fig. 3.5 a) Mercury barometer
b) Piezometer tube
2. Manometric
A standard technique for measuring pressure involves the use of liquid columns in
vertical or inclined tubes containing one or more liquid of different specific gravities.
Pressure measuring devices based on this technique are called manometers. In using a
manometer, generally a known pressure (which may be atmospheric) is applied to one
end of the manometer tube and the unknown pressure to be determined is applied to the
other end. In some cases, however, the difference between pressures at ends of the
manometer tube is desired rather than the actual pressure at the either end. A manometer
to determine this differential pressure is known as differential pressure manometer.
The mercury barometer is an example of one type of manometer, but there are many
other configurations possible, depending on the particular application. The common types
of manometers include the piezometer tube, the U-tube manometer, micro- manometer
and the inclined - tube manometer.
i.
Piezometer Tube
The simplest type of manometer consists of a vertical tube, open at the top, and attached
to the container in which the pressure is desired, as illustrated in Fig.3.5. Since
manometers involve columns of fluids at rest, the fundamental equation describing their
use is the Eq.
P = h + P0
Which gives the pressure at any elevation within a homogeneous fluid in terms of a
reference pressure p0 and the vertical distance h between p and p0? Remember that in
fluid at rest pressure will increase as we move downward, and will decrease as we move
upward. Application of this equation to the piezometer tube Fig.3.5 indicates that the
pressure PA can be determined by a measurement of h1 through the relationship.
PA = 1h1
Arba Minch University WTI Leacture Notes Prepared Otoma 21
Hydraulics I and Hydraulics II Notes
Where, 1 is the specific weight of the liquid in the container. Note that since the tube is
open at the top, the pressure Po can be set equal to zero (we are now using gage pressure),
with the height h1 measured from the meniscus at the upper surface to point (1). Since
point (1) and point A within the container are at the same elevation, PA =P1.
Although the piezometer tube is a very simple and accurate pressure-measuring device, it
has several disadvantages. It is only suitable if the pressure in the container is greater than
atmospheric pressure (otherwise air would be sucked into the system), and the pressure to
be measured must be relatively small so that required height of the column is reasonable.
Also, the fluid in the container in which the pressure is to be measured must be a liquid
rather than a gas.
ii.
U- Tube Manometer
To overcome the difficulties noted previously, another type of manometer, which is
widely used, consists of a tube formed into the shape of U as is shown in Fig.3.5. The
fluid in the manometer is called the gage fluid. To measure larger pressure differences,
we can choose a manometer with higher density, and to measure smaller pressure
differences with accuracy we can choose a manometer fluid which is having a density
closer to the fluid density.
To find the pressure pa in terms of the various column heights, we can use one of the two
ways of manometer reading techniques:
I)
Surface of equal pressure(SEP)
II)
Step by step procedure(SS)
a) Start at one end and write the pressure there
b) Add the change in pressure there
+ If next meniscus is lower.
- If next meniscus is higher
c) Continue until the other end of the gage and equate the pressure
at that point
Thus, for the U- tube manometer shown in Fig.3.5, using SS method we will start at point
A and work around to the open end. The pressure at points A and (1) are the same, and as
we move from point (1) to (2) the pressure will increase by 1h1. The pressure at point (2)
is equal to the pressure at point (3), since the pressures at equal elevation in a continuous
mass of fluid at rest must be the same. Note that we could not simply “jump across” from
point (1) to a point at the same elevation in the right – hand tube since these would not be
points within the same continuous mass of fluid. With the pressure at point (3) specified
we now move to the open end where the pressure is zero. As we move vertically upward
the pressure decreases by an amount 2h2. In equation form these various steps can be
expressed as
PA + 1h1 - 2h2 = 0
And therefore, the pressure PA can be written in terms of the column heights as
PA = 2h2 - 1h1
A major advantage of the U- tube manometer lies in the fact that the gage fluid can be
different from the fluid in the container in which the pressure is to be determined. For
example, the fluid in A in Fig. 3.5b can be either a liquid or a gas. If A does contain a
Arba Minch University WTI Leacture Notes Prepared Otoma 22
Hydraulics I and Hydraulics II Notes
gas, the contribution of the gas column, 1h1, is almost always negligible so that PA p2
and in this instance the above Eq. becomes.
PA = 2h2
Thus, for a given pressure the height, h2 is governed by the specific weight, 2, of the
gage fluid used in the manometer. If the pressure PA is large, then a heavy gage fluid,
such as mercury, can be used and a reasonable column height (not too long) can still be
maintained. Alternatively, if the pressure PA is small, a lighter gage fluid, such as water,
can be used so that a relatively large column height (which is easily read) can be
achieved.
Fig.3.5 Simple U-tube and Differential U-tube manometer
The U- tube manometer is also widely used to measure the difference in pressure
between two containers or two points in a given system. Consider a manometer
connected between container A and B as is shown in Fig.3.5. The difference in pressure
between A and B can be found by again starting at one end of the system and working
around to the other end. For example, at A the pressure is PA, which is equal to p1, and as
we move to point (2) pressure increases by 1h1. The pressure at p2 is equal to p3, and as
we move upward to from point (4) to (5) the pressure decreases by 3h3. Finally, P5 = PB,
since they are at equal elevation. Thus,
PA + 1h1 - 2h2 - 3h3 = PB
And the pressure difference is
PA - PB = 2h2 + 3h3 - 1h1
When substituting in numbers, be sure to use a consistent system of units!
iii) Differential U-tube
Inverted U-tube manometer is used for measuring pressure differences in liquids. The
space above the liquid in the manometer is filled with air which can be admitted or
expelled through the tap on the top, in order to adjust the level of the liquid in the
manometer.
Capillarity due to surface tension at the various fluid interfaces in the manometer is
usually not considered, since for a simple U –tube with a meniscus in each leg, the
capillary effects cancel (assuming the surface tension and tube diameters are the same at
each meniscus), or we can make the capillary rise negligible by using relatively large
bore tubes (with diameters of about 0.5 in, or larger). Two common gage fluids are water
Arba Minch University WTI Leacture Notes Prepared Otoma 23
Hydraulics I and Hydraulics II Notes
and mercury. Both give a well –defined meniscus, a very important characteristic for a
gage fluid, and their properties are well known. Of course, the gage fluid must be
immiscible with respect to the other fluids in contact with it. For highly accurate
measurements, special attention should be given to temperature since the various specific
weights of the fluids in the manometer well vary with temperature.
iv) Inclined – tube Manometer
To measure small pressure changes, a manometer of the type shown in Fig. 3.6 is
frequently used. One leg of the manometer is inclined at an angle, and the differential
reading 2 is measured along the inclined tube. The difference in pressure PA – PB can be
expressed as
PA 1h12 2 2 sin 3h3 PB
p A pB 2 2 sin 3h3 1h1
Or
Where it is to be noted that the pressure difference between points (1) and (2) is due to
the vertical distance between the points, which can be expressed as 2 sin. Thus, for
relatively small angles the differential reading along the inclined tube can be made large
even for small pressure differences. The inclined- tube manometer is often used to
measure small differences in gas pressures so that if pipes A and B contain a gas then
pA pB 2 2 sin
Or
2
p A pB
2 sin
Where the contributions of the gas columns h1 and h3 have been neglected. The above
Equation shows that the differential reading 2 (for a given pressure difference) of the
inclined –tube manometer can be increased over that obtained with a conventional U-tube
manometer by the factor 1/sin. Recall that sin 0 as 0.
Fig.3.6 Inclined Tube manometer
Arba Minch University WTI Leacture Notes Prepared Otoma 24
Hydraulics I and Hydraulics II Notes
3.
Mechanical and Electronic pressure measuring devices
Although manometers are widely used, they are not well suited for measuring very high
pressures, or pressures that are changing rapidly with time. In addition, they require the
measurement of one or more column heights, which although not particularly difficult,
can be time consuming. To overcome some of these problems numerous other types of
pressure –measuring instruments have been developed. Most of these make use of the
idea that when a pressure acts on an elastic structure the structure will deform, and this
deformation can be related to the magnitude of the pressure. Probably the most familiar
device of this kind is the Bourdon pressure gage, which is shown in Fig.3.7.
The essential mechanical element in this gage is the hollow, elastic curved tube (Bourdon
tube) which is connected to the pressure source as shown in Fig. As the pressure within
the tube increases the tube tends to straighten, and although the deformation is small, it
can be translated into the motion of a pointer on a dial as illustrated. Since it is the
difference in pressure between the outside of the tube (atmospheric pressure) and the
inside of the tube that causes the movement of the tube, the indicated pressure is gage
pressure. The Bourdon gage must be calibrated so that the dial reading can directly
indicate the pressure in suitable units. A zero reading on the gage indicates that the
measured pressure is equal to the local atmospheric pressure. This type of gage can be
used to measure a negative gage pressure (vacuum) as well positive pressure.
Figure 3.7 Bourdon Gauge
Manometers-advantages and limitations
The manometer in its various forms is an extremely useful type of pressure measuring
instrument, but suffers from a number of limitations.
While it can be adapted to measure very small pressure differences, it cannot be used
conveniently for large pressure differences - although it is possible to connect a number
of manometers in series and to use mercury as the manometric fluid to improve the range.
(Limitation)
Arba Minch University WTI Leacture Notes Prepared Otoma 25
Hydraulics I and Hydraulics II Notes
A manometer does not have to be calibrated against any standard; the pressure difference
can be calculated from first principles. (Advantage)
Some liquids are unsuitable for use because they do not form well-defined menisci.
Surface tension can also cause errors due to capillary rise; this can be avoided if the
diameters of the tubes are sufficiently large - preferably not less than 15 mm diameter.
(Limitation)
A major disadvantage of the manometer is its slow response, which makes it unsuitable
for measuring fluctuating pressures. (Limitation)
It is essential that the pipes connecting the manometer to the pipe or vessel containing the
liquid under pressure should be filled with this liquid and there should be no air bubbles
in the liquid. (Important point to be kept in mind)
Tutorial Problems
1. What is the pressure at a point 10m below the free surface in a fluid that has a
variable density in kg/m3 given by 450 ah , in which a 12 Kg / m 4 and h is
the distance in meters measured from the free surface.
2. Express a pressure of 50Kpa in a) mm of mercury b)m of water c)m of acetylene
tetra bromide, S=2.94.
3. Determine the heights of column of water; kerosene, S=0.83; and acetylene tetra
bromide, S=2.94 equivalent to 300mmHg.
4. The tube in fig.3 is filled with oil. Determine the pressure at A and B in meters of
water.
5. Calculate the pressure at A, B, C and D of fig.4 in Pascals.
6. In fig.1 S1 =0.86, S2=1.0, h1=150mm, and h2=90mm.Find PA in mmHg gage. If
the barometric reading is 720mmHg, what is PA in meters of water absolute?
Fig.1
Fig.2
7. Gas is contained in vessel A of the fig.1 with water being the manometer fluid and
h1=75mm. Determine the pressure at A in mmHg.
8. In fig.2, S1=1.0, S2=0.95, S3=1.0, h1=h2=280mm and h3=1m. Compute PA-PB in
mm of water.
9. In problem 8 find the gage difference h2 for PA-PB= -350 mmH2O.
10. In the fig. 5 A contains water, and the manometer fluid has a specific gravity of
2.94. When the left meniscus is at zero on the scale, PA=100mmH2O. Find the
Arba Minch University WTI Leacture Notes Prepared Otoma 26
Hydraulics I and Hydraulics II Notes
reading of the right meniscus for PA=8KPa with no adjustment of the U-tube or
scale.
11. In Fig.6 find the pressure at A in pascals. What is the pressure of the air in the
tube?
12. The differential mercury manometer of fig. 7 is connected pipe A containing
gasoline (S=0.65), and to pipe B containing water. Determine the differential
reading, h, corresponding to a pressure in A of 20KPa and a vacuum of 150mmHg
in B.
13. Determine the angle of the inclined tube shown in Fig. 8 if the pressure at A is
2 psi greater than that at B.
Fig.5
Fig.4
Arba Minch University WTI Leacture Notes Prepared Otoma 27
Hydraulics I and Hydraulics II Notes
Fig.7
Fig.6
Fig.8
Hydrostatic pressure on plane and curved surfaces
When a surface is submerged in a fluid, forces develop on the surface due to the fluid.
The determination of these forces is important in the design of storage tanks, ships,
dams, and other hydraulic structures. For fluid at rest we know that the force must be
perpendicular to the surface since there are no shearing stresses present. We also know
that the pressure will vary linearly with depth if the fluid is incompressible.
1. Forces on plane surface
The distributed forces resulting from the action of fluid on a finite area can be
conveniently replaced by resultant force. The magnitude of resultant force and its line
of action (pressure center) are determined by integration, by formula and by using the
concept of the pressure prism.
i. Horizontal surfaces
A plane surface in a horizontal position in a fluid at rest is subjected to a constant
pressure.
The magnitude of the force acting on one side of the surface is
x
A
A
PdA=PdA=PA
Arba Minch University WTI Leacture Notes Prepared Otoma 28
Hydraulics I and Hydraulics II Notes
The elemental forces PdA acting on A are all parallel. The summation of all elements
yields the magnitude of the resultant force. Its direction is normal to the surface.
To find line of action of the resultant, the moment of resultant is equated to the
moment of the distributed system about any axis (y-axis).
i.e.
PAx1=A x PdA
x1 is the distance from the y axis to the resultant.
1
x dA x
p-is constant.
A A
x is the distance to the centroid of the area.
Hence, for a horizontal area subjected to static fluid pressure, the resultant passes
through the centroid of the area.
ii. Inclined surfaces
A plane surface which is inclined to the water surface may be subjected to hydrostatic
pressure. For a plane inclined 0 from the horizontal, the intersection of the plane of area
and the free surface is taken as the x-axis. The y-axis is taken in the plane of the area with
origin 0 at the free surface. Thus, the x-y plane portrays the arbitrary inclined area. We
wish to determine the magnitude, direction and line of the action of the resultant force
acting on one side of this area due to the liquid in contact with the area.
x1=
For an element area A at y distance from the origin, the magnitude of the force F
acting on it is
F = P A = hA = y sin A
Since all such elemental forces are parallel, the integral over the area yields the
magnitude of force, F, acting on one side of the area.
F= PdA sin ydA sin Y A hA PG . A
=hc.A
Arba Minch University WTI Leacture Notes Prepared Otoma 29
Hydraulics I and Hydraulics II Notes
Fig.
hc=yc.sin
Y sin h and pG h ; The pressure at the centroid of the area.
Hence, the force exerted on one side of a plane area submerged in a liquid is the
product of the area and the pressure at its centroid.
The point on the plane surface where this resultant force acts is known as the center of
pressure. Considering the plane surface as free body we see that the distributed forces
can be replaced by a single resultant force at the pressure center without altering any
reactions or moments in the system.
F dF PdA
A
Let xp and yp be distances measured from the y-axis and x-axis to the pressure
center respectively, then
1
ydF
F
But F= sin A Y and dF y sin dA
I
1
1
yp
y 2 sin dA
y 2 dA o
sin AY
AY
AY
F . y p y. dF ,
yP
2
But, Io = AY +Ig
Arba Minch University WTI Leacture Notes Prepared Otoma 30
Hydraulics I and Hydraulics II Notes
yp Y
Ig
AY
y p Y 0 , b / c I g is positive.
This shows that center of pressure is below the center of gravity (or centroid).
Where Ig-is the moment of inertia of the plane with respect to its own centroid.
x p .F x.dF x.y sin .dA
Xp
I xy
1
1
xy sin .dA
x. y.dA
Y A sin A
AY A
AY
I xy X .Y .A I xyg
Xp
I xyg
X (Product of inertia at (x, y)).
AY
The pressure prism
The pressure prism is an approach, which is developed for determining the resultant
hydrostatic force and line of action of the force on a plane surface. It is a prismatic
volume with its base the given surface area and with altitude at any point of the base
given by p=h. Where h is the vertical distance to the free surface.
Fig. Pressure prism
Arba Minch University WTI Leacture Notes Prepared Otoma 31
Hydraulics I and Hydraulics II Notes
Force acting on the element area A is:
F=h A= , which is an element of volume of the pressure prism.
After integrating, F=, the volume of the pressure prism equals the magnitude of the
resultant force acting on one side of the surface. The center of pressure is given by
1
1
xp = x.d and y p y.d .
This shows that the resultant force passes through the centroid of the pressure prism.
Therefore; the pressure force is the volume of the prism in magnitude acting at the
centroid of the prism normal to the surface.
2. Forces on curved surfaces
When the elemental forces pA vary in direction, as in the case of a curved surface, they
must be added as vector quantities that is, their components in three mutually
perpendicular directions are added as scalars and then the three components are added
vector ally. With two horizontal components at right angle and with vertical componentall easily computed for a curved surface the resultant can be determined. The lines of
action of the components also are readily determined.
Horizontal component of Forces on a curved surface
The horizontal component of pressure force on a curved surface is equal to the pressure
force exerted on a vertical projection of the cured surface. The vertical plane of the
projection is normal to the direction of the component.
Thus, the magnitude and the line of action of the horizontal component of force on a
curved surface can be determined by using the relations developed for plane surface.
Vertical component of force on a curved surface
The vertical component of pressure force on a curved surface is equal to the weight of
liquid vertically above the curved surface and extending up to the free surface and acts
through the center of gravity of the fluid mass within the volume.
Fig. Forces on curved surface
Arba Minch University WTI Leacture Notes Prepared Otoma 32
Hydraulics I and Hydraulics II Notes
3.4 Tensile stress in a pipe and spherical shell
A circular pipe under the action of an internal pressure is in tension around its periphery.
Assuming that no longitudinal stress occurs, the walls are in tension, as shown in Fig.
below.
1 unit
T1
T1
T1
T2
FH
y
T2
T2
Fig. Internal forces on walls of a pipe. A section of pipe of unit length is considered
The bursting of a pipe can be thought of as a tendency for the top half to separate from
the bottom half. The only force acting against this tendency is the hoop tension (T) of the
pipe walls then the bursting pressure force must exactly equal the hoop tension.
Total bursting pressure = P* 2r * 1
P = pressure at the center line
r = the internal pipe radius
For high pressures the pressure center can be taken at the pipe center; then T1 = T2
T = Pr
T
pr
For wall thickness t, the tensile stress in the pipe wall, =
t
t
For larger variations in pressure b/n top and bottom of pipe, the location of pressure
center y is computed.
[FH = 0} T1+ T2 =FH =2pr
[ M @T2 ] 2rT1 -2pry = 0 (Neglecting the vertical component)
T1 = py T2 = p (2r-y)
Thin spherical shell subjected to an internal pressure
Fluid force FH = Pr2 (considering half of the sphere)
Resisting force = stress in the wall * cut wall area = * 2 r *t
Neglecting the weight
= Pr/2t
3.5 Relative Equilibrium
Translation and Rotation of fluid masses
A general class of problems involving fluid motion in which there are no shearing
stresses occur when a mass of fluid undergoes rigid body motion. For example, if a
container of fluid accelerates along a straight path, the fluid will move as a rigid mass
(after the initial sloshing motion has died out) with each particle having the same
acceleration. Since there is no deformation, there will be no shearing stresses and
similarly if a fluid is contained in a tank that rotates about a fixed axis, the fluid will
Arba Minch University WTI Leacture Notes Prepared Otoma 33
Hydraulics I and Hydraulics II Notes
simply rotate with the tank as a rigid body. In both cases there is no relative motion
between particles; hence no shear stress occurs in the fluid. This condition of fluid is
called relative equilibrium. Generally, there is no motion between the fluid and the
containing vessel, however, there is an additional force acting to cause the acceleration.
Specific results for these two cases (rigid body uniform motion and rigid body rotation)
are developed in the following two sections. Although problems relating to fluids having
rigid body motion are not strictly speaking, “fluid static” problems, they are induced in
this chapter because as we will see the analysis and resulting pressure relationships are
similar to those for fluid at rest. (Laws of fluid static’s can still be applied by modifying
to allow for effects of acceleration.)
i. Uniform linear acceleration
Consider a small rectangular element of fluid of size x, y and z as shown in the figure
below, z being measured perpendicular to the paper.
Constant pressure
planes
ay
y
ax
y
x
P
ax
W=xyz
x
Fig. Linear acceleration of a liquid with a free surface
The pressure on the left face of the elemental fluid
p 1
P x
x 2
p
and on the right face P 1/ 2x
x
For equilibrium in the x –direction
p
p
P x 1 / 2 x P x 1 / 2 x yz x y z ax
Arba Minch University WTI Leacture Notes Prepared Otoma 34
Hydraulics I and Hydraulics II Notes
p
x y z x y z ax
x
p
ax (*)
x
Similarly, in the y direction
p
x y z xyz x y z a y
y
p
pa y
y
ay
p
1 (**)
y
g
dp
p
p
p
.dx d y dz
x
y
z
(az 0)
ay
dp ax d x 1 dy
g
ay
P ax x 1 Y C
g
If x = y = 0
P = C = P0
ay
P = - ax x - 1Y P0
g
If the origin is taken at a point on the free surface, P0 = 0 (= Patm)
ay
Thus, p = -ax x – 1 Y
g
ay
1 Y P ax x
g
Arba Minch University WTI Leacture Notes Prepared Otoma 35
Hydraulics I and Hydraulics II Notes
P
ax x
a
a
y 1 y 1
g
g
ax
p
Y
x
(* * *)
ay g
ay
1
g
Y =mx+b
a
The slope of the free surface will be m = - x
ay g
Y
P
a
y 1
g
Along a free surface the pressure is constant, so that for the accelerating mass shown in
the figure the free surface will be inclined if ax 0. In addition, all lines of constant
pressure will be parallel to the free surface.
For the special circumstance in which ax = 0, ay 0, which corresponds to the mass of
fluid accelerating in the vertical direction, equation (***) indicates that the fluid surface
will be horizontal. However, from Eq (**) we see that the pressure distribution is not
ay
p
1 (a y g )
hydrostatics, but is given by the equation
y
g
For fluids of constant density this equation shows that the pressure will vary linearly with
depth but the variation is due to the combined effects of gravity and the externally
induced acceleration, (g +ay) rather than simply the specific weight g.
Note:
Pressure along the bottom of a liquid filled tank which is resting i.e. accelerating
upward will be increased over that which exists when the tank is at rest (or moving
with a constant velocity).
For a freely falling fluid mass (ay = -g) the pressure gradients in all the three
coordinate directions are zero which means that if the pressure surrounding the
mass is zero the pressure through will be zero.
ii. Vortex flow
The flow of a fluid along a curved path or the flow of a rotating mass of fluid is known as
vortex flow. The vortex flow is of two types namely: forced vortex flow and free vortex
flow.
Forced vortex flow:
It is defined as that type of vortex flow, in which some external torque is required to
rotate the fluid mass. The fluid mass in this type of flow rotates at constant angular
velocity, . The tangential velocity of any fluid particle is given by
= r
Where r = radius of fluid particle from the axis of rotation.
and the y – intercept b
Arba Minch University WTI Leacture Notes Prepared Otoma 36
Hydraulics I and Hydraulics II Notes
Central axis
Liquid
Cylinder stationary
Fig. Forced vortex flow
Cylinder is rotating
Hence angular velocity is given by
cons tan t
r
Examples of forced vortex are:
1. A vertical cylinder containing liquid which is rotated about its central axis with a
constant angular velocity , as shown in figure above.
2. Flow of liquid inside the impeller of a centrifugal pump.
3. Flow of water through the runner of a turbine.
Free vortex flow
Type of flow when no external torque is required to rotate the fluid mass is called free
vortex flow. Thus the liquid in case of free vortex is rotating due to the rotation which is
imparted to the fluid previously. Examples of the free vortex flow are:
1. Flow of a liquid through a hole provided at the bottom of a container.
2. Flow of liquid around a circular bend in a pipe.
3. Flow of fluid in a centrifugal pump casing.
Free vortex flow will be treated in the coming chapter.
Equation of forced vortex flow
Uniform rotation about a vertical axis
Consider a small element of fluid to move in a circular path about an axis with radius r,
and angular velocity .
Arba Minch University WTI Leacture Notes Prepared Otoma 37
Hydraulics I and Hydraulics II Notes
Axis of rotation
Axis of rotation
r2
r1
z1
r
z2
Fig. Rigid body rotation
For constant angular velocity , the particle will have an acceleration of 2r directed
radically inward.
p
2 r wr Fr mar
r
g
P
0
p
Fy
y
These results show that for this type of rigid body rotation, the pressure is a function of
two variables r and y, and therefore the differential pressure is
dp
dp
dp
dy
dr
dy
dr
dp dy
2
dr
g
This equation gives the var iation of pressure of a rotating fluid.
r2
p y 2
C
g
2
For r=0, y=0, P=C=P0
2r 2
P=P0-y +
2g
Consider two points 1 and 2in the fluid as shown above. Integrating the above equation
for point 1 and 2 we get,
Arba Minch University WTI Leacture Notes Prepared Otoma 38
Hydraulics I and Hydraulics II Notes
2
2
1
1
dp
2
2
rdr dy
g
1
2
2 2
21
p2 p1
r y 1
2
g
1
p2 p1
2
r
2g
r
2g
2
2
r12 y2 y1
2
r12 y2 y1
2
If the points 1 and 2 lie on the free surface of the liquid, then p1=p2 and hence the above
equation becomes
r
2g
2
2
r12 y2 y1 =0
1
r2 2 r12
2g
If the point 1 lies on the axis of rotation, then the above equation becomes
2r22
y2 y1
2g
Let y2-y1 = y, then
2 r22
y=
2g
Thus y varies with the square of r. Hence the equation is an equation of parabola. This
means the free surface of the liquid is a paraboloid.
Note: Volume of paraboloid of revolution is half of the volume of the circumscribing
cylinder.
y2-y1=
Tutorial Problems
1. The tank below is accelerated in the x direction to maintain the liquid surface slope at
-5/3. What is the acceleration of the tank?
2. The closed tank shown, which is full of liquid, is accelerated downward at 2/3 gand to
the right at one g. Here L=2m H=3m, and the liquid has a specific gravity of 1.3.
Determine Pc-Pa and Pb-Pa.
L
Vertical
3
Liquid
H
5
Water
x
C
B
A
Arba Minch University WTI Leacture Notes Prepared Otoma 39
Hydraulics I and Hydraulics II Notes
In the figure below
a) ax=9.806m/s2 ,ay=0
b) ax=4.903 m/s2, ay=9.806 m/s2 find the pressure at A,B and C.
Y
y
ay
x
A
X
0.3m
ax =2.45 m/s2
30cm
ax
1m
A
B
C
60cm
1.3m
3. The tube shown above is filled with liquid, s = 2.40. When it is accelerated to the
right 2.45 m/s2, draw the imaginary free surface and determine the pressure at A.
4. A cylindrical vessel, 100mm in diameter and 0.3m high, contains water when at rest
to a depth of 225mm. If the vessel is rotated about its longitudinal axis, which is
vertical calculate the speed at which the water will commence to spill over the edge,
and the speed when the axial depth is zero.
5. The open U tube of the following Fig. is partially filled with a liquid. When this
device is accelerated with a horizontal acceleration, a differential reading, h develops
between the monometer legs which are spaced a distance a part. Determine the
relationship between a, and h.
h
a
l
6. A closed cylindrical vessel of diameter 15cm and length 100cm contains water up to a
height of 80cm. The vessel is rotated at a speed of 500r.p.m. about its vertical axis.
Find the height of paraboloid formed.
Arba Minch University WTI Leacture Notes Prepared Otoma 40
Hydraulics I and Hydraulics II Notes
7. For the date given in question 3, find the speed of rotation of the vessel, when the
axial depth is zero.
8. If the cylindrical vessel of question 3, is rotated at 950 r.p.m. about its vertical axis,
find the area uncovered at the base of the tank
3.5 Buoyancy and stability of floating bodies
1. Buoyant force (Resultant fluid force in a body)
The buoyant force on a submerged body is the difference between the vertical
components of pressure force on its underside and the vertical component of pressure
force on its upper side. The buoyant force always acts vertically upward. There can be no
horizontal component of the resultant because the projection of the submerged body or
submerged portion of the floating body on a vertical plane is always zero.
PBdA
hB
PBdA
PDdA
hC
O
x
PCdA
Fig 3.13 Buoyant force on a submerged body
Assume a vertical cylindrical element of cross- sectional area dA. As dA is small, the
pressure on the exposed ends of the cylinder may be taken as p1 and p2.
Since p2> p1, there will be an upward force (p2 –p1) dA acting on the cylindrical element.
dFB = (p2 – p1 ) dA = (h2-h1) dA = dv
Where dv = volume of the prism
The entire body may be considered to be made up of small cylindrical elements, then
integrating over the complete body gives
v
v
FB dFB dv dv V
is assumed constant throughout the volume.
V= Volume of the body
The basic principle of buoyancy and flotation was fist discovered and stated by
Arba Minch University WTI Leacture Notes Prepared Otoma 41
Hydraulics I and Hydraulics II Notes
Archimedes over 2200 years ago. Archimedes principle states that the up thrust or the
buoyancy on a body immersed in a fluid is equal to the weight, of the fluid displaced. The
up thrust will act through the center of gravity of the displaced fluid, which is called the
center of buoyancy.
By applying Archimedes’ principle, volumes of irregular solids can be found by
determining the apparent loss of weight when a body is wholly immerse in a liquid of
known specific gravity. Specific gravities of liquids can be determined by observing the
depth of flotation of a hydrometer. Further applications include problems of general
flotation and of naval architectural design.
To find the line of action of the buoyant force, moments are taken about a convenient
axis 0.
V x x. dv
x The distance from the axis to the line of action.
x
1 v
x.dv (Centroid of the displaced volume of fluid) i.e. B.
v
A body immersed in two different fluids
Up thrust on body = weight of fluid displaced by the body (Archimedes principle.)
If the body is immersed so that part of its volume V1 is immersed in a fluid of density 1
and the rest of its volume V2 in another immiscible fluid of mass density 2,
Up thrust on upper part, R1 = 1gV1
acting through G1, the centroid of V1,
Up thrust on lower part,R2 = 2gV2
acting through G2, the centroid of V2,
Total up thrust = 1gV1 + 2gV2.
The positions of G1 and G2 are not necessarily on the same vertical line, and the centre of
buoyancy of the whole body is, therefore, not bound to pass through the centroid of the
whole body.
Hydrometers
Precise measurement of the specific weight of a liquid is done by utilising the principle of
buoyancy. The device used for this, the hydrometer, is a glass bulb that is weighted on
one end to make the hydrometer float in a vertical position and has a stem of constant
diameter extending from the other end. The hydrometer is so designed that only the stem
end extends above the liquid surface. Therefore, appreciable vertical movement of the
hydrometer is required to change the buoyant force or displaced volume of the device.
Because the buoyant force (equal to the weight of the hydrometer) must be constant, the
hydrometer will float deeper or shallower depending on the specific weight of the liquid.
Consequently, graduation on the stem, corresponding to different depths of submergence
of the hydrometer, can be made to indicate directly the specific weight or specific gravity
of the liquid being measured. Consider the following figure
Arba Minch University WTI Leacture Notes Prepared Otoma 42
Hydraulics I and Hydraulics II Notes
1.0
1.0
h
Distilled Water
(Vo-V)S
Vo
W
W
Fig.3.14 Hydrometer in water and in liquid of specific gravity S
In the distilled water, the hydrometer floats in equilibrium when V0 = W
In which V0 is the volume submerged, is the specific weight of water, and W is the
weight of the hydrometer. The position of the liquid surface is marked as 1.0 on the stem
to indicate unit specific gravity S. When the hydrometer is floated in another liquid, the
equation of equilibrium becomes
(Vo-V)S = W in which V = ah. Solving for h with the above equations gives
h
Vo S 1
a S
One common use of hydrometers is in checking the state of charge of a car battery. When
a battery is fully charged the specific gravity of the acid in it is about 1.28, and during
discharge this specific gravity falls. The instrument used to check the state of charge is
called a battery tester and it consists of a small hydrometer inside a glass container.
Floating in salt water and in fresh water
Exercise: People find that it is easier to float in salt water than in fresh water. Explain
If an egg is placed in a tall vessel and water is added, the egg remains on the
bottom, but if salt is added and the water is stirred, the egg rises and floats.
Why?
3.5.2. Stability of submerged and floating bodies.
Three Possible conditions of equilibrium of solid body.
1. Stable equilibrium – A small displacement from the equilibrium produces a
righting moment tending to restore the body to the equilibrium position.
2. Unstable equilibrium – A small displacement produces an over turning moment
tending to displace the body further from its equilibrium position
3. Neutral equilibrium - The body remains at rest in any position to which it may be
displaced. No couple.
Arba Minch University WTI Leacture Notes Prepared Otoma 43
Hydraulics I and Hydraulics II Notes
Fig. 3.14 Conditions of equilibrium
1. Submerged body
*B
*G
*G
*B
* B, G
B>G
G>B
G=B
Stable equilibrium (+ve stability) Unstable equilibrium (-ve stability) Neutral
equilibrium (0 stability)
For a submerged body, the center of buoyancy remains constant. If an object is fully
submerged, whether it is a balloon in air or a submarine in water, it must be designed
that the center of buoyancy lies some distance above the center of gravity.
Exercise
Explain with example why the center of buoyancy and the center of gravity are
located at different points for a fully submerged object.
2. Floating body
The following figure shows a solid body floating in equilibrium (weight acts through G &
the buoyancy through B). Both act in the same straight line. When the body is displaced
from its equilibrium, weight continues to act at G. The volume of liquid displaced
remains constant but the shape of this volume will change and the position of its G and B
will move relative to the body.
The point at which the line of action of the buoyant force for the displaced position cuts
the original vertical through the center of gravity of the body G is called metacenter,
designated M stable equilibrium. Metacentric height is the distance GM.
Arba Minch University WTI Leacture Notes Prepared Otoma 44
Hydraulics I and Hydraulics II Notes
Fig.3.16 Stable equilibrium a)
b)
The displaced fluid is rectangular in section (fig. a) but it is triangular in fig.b and the
center of buoyancy moves to B1. As a result F8 and W are not in the same straight line
producing a turning moment WX that is a righting moment.
Fig.3.17 Unstable equilibrium a)
b)
Comparing the above figures, it can be seen that:
1. If M lies above G a righting moment is produced, GM is regarded as positive, and
equilibrium is stable.
2. If M lies below G an overturning moment is produced, GM is regarded as
negative, and equilibrium is unstable.
3. If M and G coincide the body is in neutral equilibrium.
Arba Minch University WTI Leacture Notes Prepared Otoma 45
Hydraulics I and Hydraulics II Notes
Evaluation of Metacentric height
l
c
a
b
a
G
B
a’
O
a
a
b’
G
B
d
c
FB
B’ FB
O
b
x
d
Fig.3.18 x –section and plan in upright position
Consider a non –prismatic floating object, such as a ship. Assume an outside force is
applied causing the body to tilt through a small angle . The relative position of the G
remains unchanged but B shifts from B to B’. The volume of fluid displaced is of course
unchanged and in effect a wedge shaped volume of water represented by aoa’ has shifted
across the central axis to bob’. These wedges represent a gain in the buoyant force on the
right side and a corresponding loss in buoyancy on the left side of c-d.
The buoyant force FB acting through B’ may be considered as the resultant of the original
buoyant force through B and the gain & loss of buoyant force.
Taking moment about B, we have
* BM sin FB *
components.)
F
B
(Moment of resultant = moment of
Consider an element of area dA in plan at a distance x, from O. The buoyant force acting
on this element is x dA.
<< Small tan sin
FB = * volume = x dA
Then FB = xdA
(integrated half of the water line)
Moment of this force about O
Arba Minch University WTI Leacture Notes Prepared Otoma 46
Hydraulics I and Hydraulics II Notes
FB * / 2 x 2 dA
FB * 2 x 2 dA
If the integration is performed over the entire area
A
A
FB * x dA x 2 dA
2
A
x
2
dA Moment of inertia I of a horizontal section of the body taken at the surface of
the fluid
FB * I
FB BM sin FB *
W BM I
I I
I
BM
W v V
V = volume of water displaced by the vessel.
GM BM BG
I
BG
V
I
If the G is below B, then GM BG
V
I
GM
BG
V
Attend the laboratory session for experimental determination of the metacentric height.
Time of oscillation
Consider a floating body, which is tilted through an angle by an overturning couple as
shown below. Let the overturning couple is suddenly removed. The body will start
oscillating. Thus, the body will be in a state of oscillation as if suspended at the metacenter M. This is similar to a case of a pendulum. The only force acting on the body is
due to the restoring couple due to the weight w of the body force of buoyancy FB.
Metacentric height
Arba Minch University WTI Leacture Notes Prepared Otoma 47
Hydraulics I and Hydraulics II Notes
M
Y
W
W
FB
FB
Y
Fig. Tilted floating body
Restoring couple = W GM sin
d 2
Angular acceleration of the body, = 2
dt
Negative sign has been introduced as the restoring couple tries to decrease the angle .
d 2
Torque due to inertia = IY-Y ( 2 )
dt
But IY-Y = (W/g) K2
Where W=weight of body, K=radius of gyration about Y-Y
d 2
Inertia torque = - (W/g) K2 ( 2 )
dt
Equating the above equations
d 2
d 2
2
W GM sin = - (W/g) K2 ( 2 ) or GM sin = - (K /) ( 2 )
dt
dt
For small angle , sin =
GM = - (K2/g) (
d 2
d 2
2
)
or
(K
/g)
(
) + GM = 0
dt 2
dt 2
d 2 Gg
0
2 +
K2
dt
This is second-degree differential equation, the solution is
C1 sin
GM g
GM g
*t C2 Cos
*t
2
K
K2
Where C1 and C2 are constants of integration.
The values of C1 and C2 are obtained from boundary conditions, which are
Arba Minch University WTI Leacture Notes Prepared Otoma 48
Hydraulics I and Hydraulics II Notes
i)
at t=0, =0
ii)
at t=(T/2), =0
Where T=time of one complete oscillation
Substituting the first boundary condition, C2=0
Substituting the second boundary condition, we get 0= C1 sin
Mg T
*
K2
2
But C1 cannot be equal to zero and so the other alternative is
GM g T
sin
* 0 sin
2
K2
GM g T
K2
*
or
T
2
2
GM g
K2
This gives the time period of oscillation or rolling of a floating body.
Tutorial Problems
1. An object weighs 289.2N in air and 186.9N in oil of S= 0.75. Find its volume and
relative density.
2. Two cubes of the same size, 1m3, one of s=0.8 and the other of s=1.1 are connected
by a short wire and placed in water. What portion of the lighter cube is above the
water surface and what is the tension in the wire?
3. A solid cube of wood of specific gravity 0.9 floats in water with a face parallel to the
water line. If the length of one edge is 10cm, find its metacentric height.
4. A homogeneous block of density is floating between two liquids of densities 1<
and 2>. Determine the expression for the distance that the block protrudes in to the
top liquid.
5. A hydrometer weighs 0.035N and has a stem of 5mm in diameter. Compute the
distance between relative density markings 1.0 and 1.1.
6. A 1m diameter cylindrical mass M is connected to a 2m wide rectangular gate as
shown in Fig.1. The gate is to open when the water level, h, drops below 2.5m.
Determine the required value for M. Neglecting friction at the gate hinge and the
pulley.
7. Show that a cylindrical buoy of 1m diameter and 2m height weighing 7.848KN will
not float vertically in sea water of density 1030Kg/m3. Find the force necessary in a
vertical chain attached at the center of base of the buoy that will keep it vertical.
8. A uniform rectangular body 2m long 1m wide and 0.8m deep floats in water, the
depth of immersion being 0.6m.What is the weight of the body? Find also the position
of the methacenter. Is the equilibrium stable?
9. The two spheres each have s=1.4. Ignore friction and the weight of the support
system. If the system is balanced, what must be the diameter of the sphere that is
submerged in water?
Arba Minch University WTI Leacture Notes Prepared Otoma 49
Hydraulics I and Hydraulics II Notes
4m
h
1m
Fig.2 Problem 9
Fig.1 Problem 6
10. The piston of the ball valve shown in Fig.3 Have an effective diameter of 10mm. The
valve just closes when ¼ of the volume of the ball is submerged. Calculate the
pressure in KN/m2 of the mains supply.
11. A pipeline has to be laid below the surface of a lake. The pipe is 300mm internal
diameter, its walls are 12.5mm thick and its weight per meter length is 150N. Will
buoyancy effects create any problems? Consider pipe full and pipe empty cases.
Fig.3 Problem 10
12. A rigid solid cone with apex angle of 300 is of density S relative to that of the liquid
in which it floats with apex downwards. Determine what range of s is compatible
with stable equilibrium.
13. A rectangular pontoon 10.5m long, 7.2m broad and 2.4m deep has a mass of
70,000kg. It carries on its upper deck a horizontal boiler of 4.8m diameter and a mass
of 50,000Kg. The centers of gravity of the boiler and the pontoon may be assumed to
be at their centers of figure and in the same vertical line. Find the metacentric height.
Density of seawater 1025Kg/m3.
14. A pail of water weighting 18N rests on scale B. a uniform density block having a
volume of 35cm3 and a specific gravity of 2.5 is hung from scale A and submerged in
the water as shown. Assume that no water spills. What will be the reading of scale A
and B? What will the scales read if the block is exactly half submerged?
Arba Minch University WTI Leacture Notes Prepared Otoma 50
Hydraulics I and Hydraulics II Notes
120mm 120mm 5m
Hinge
Water
Timber
Concrete
Fig.1 Ass.1
Fig.2 Ass.2
15. The timber in Fig. 2 is held in a horizontal position by the concrete anchor. The
120mm by 120mm by 5m timber has a specific gravity of 0.6, while that of concrete
is 2.5. What must be the minimum total weight of concrete?
16. Determine the metacentric height of the circular tube shown in Fig.3
17. A right circular cylinder of radius ro and height ho has a specific gravity S. It is
required to float in water with end faces horizontal. Determine the ratio of ro/ ho for
stable equilibrium.
Centerline
0.6m
Air
r=30cm
3m
Water
R=1m
Open end
Cable
Steel block
Fig.3 Ass.3
Fig.4 Ass.6
18. A stick of timber, weighing 6.86KN/m3 measures 15cmx30cmx6cm. What load will it
carry without sinking if placed in fresh water?
19. The thin walled, 1m-diameter tank of Fig. 4 is closed at one end and has a mass of
90Kg. The open end of the tank is lowered into the water and held in the position
shown by a steel block having a density of 7840Kg/m3. Assume that the air that is
trapped in the tank is compressed at a constant temperature. Determine: a) The
reading on the pressure gage at the top of the tank, and b) The volume of the block.
Arba Minch University WTI Leacture Notes Prepared Otoma 51
Hydraulics I and Hydraulics II Notes
20. The 2m wide homogeneous rectangular gate of Fig.5 is hinged at A and a 6m 3 block
of concrete (S=2.3) is connected to the gate through its Centre of gravity. Determine
the minimum force P required to hold the gate closed. The weight of the gate can be
neglected and the hinge is smooth.
2m
7m
P
Oil, S=0.9
300
Concrete
Fig.5
21. A ship 60m long and 12m broad has a displacement of 19620KN. A weight of
294.3KN is moved across the deck through a distance of 6.5m. The ship is tilted
through a50. The moment of inertia of the ship at water line about its for and aft axis
is 75% of moment of inertia of the circumscribing rectangle. The center of buoyancy
is 2,75m below waterline. Find the meta-centric height and position of center of
gravity of ship. Take sea water =10104N/m3.
22. Find the time period of rolling of a solid circular cylinder of radius 2.5m and 5m long.
The specific gravity of cylinder is 0.9 and is floating in water with its axis vertical.
23. A barge is to be designed to carry loads up to 500 tones to a construction site on a
river. When laden, the depth of the bottom of the barge below the water surface (the
drought), d, is to be limited to 3m and the breadth, b, to 10m. For initial calculations it
may be assumed that the barge is rectangular in plan and cross section and
constructed of steel plate of mass 160kg/m2. The worst loading case is expected to be
when two long 2.5m diameter hollow cylinders, each of mass 250tones are placed
with their axes 3m apart symmetrically about the centerline of the barge. Assume that
the density of water is 1.0 tone/m3.
Suggest suitable dimensions of the barge, and estimate its metacentric height and
period of roll when laden. Neglect the mass of any internal structure, e.g. bulkheads,
in the barge.
Check that the barge will still be stable when one of the cylinders has been unloaded.
Arba Minch University WTI Leacture Notes Prepared Otoma 52
Hydraulics I and Hydraulics II Notes
CHAPTER FOUR
4. KINEMATICS OF FLUID FLOW
INTRODUCTION: -Kinematics of fluid deals with the geometry of motion, i.e. space –
time relationships of fluids only without regards to the forces causing the motion.
They are generally deals with velocity & acceleration of fluid, and the description and
visualization of motion.
The concept of a free body diagram, as used in static of rigid bodies in a fluid static is
usually inadequate for the analysis of moving fluids. Instead we frequently find the
concepts of system & control volume to be useful in the analysis of fluid mechanics.
A fluid system refers to a specific mass of fluid within the boundaries defined by a closed
surface. The shape of the system, & so the boundaries, may change with time, as when
liquid flows through a constriction, as a fluid moves& deforms, so the system containing
it moves & deforms.
In contrast, a control volume refers to a fixed region in space, which doesn’t move or
change shape. It is usually chosen as a region that fluid flows in to & out of it.
The control volume approach is also called the Eulerian approach.
In the Eulerian method the observers concern is to know what happens at any given point
in the space, which is filled by fluid in motion, what are the velocities, acceleration,
pressure, etc. at various parts at a given time.
Therefore, Eulerian method is mostly used because it is more useful in the analysis of the
majority of engineering problems.
4.1 DIMENSION OF FLOW
A Fluid flow said to be one, two or three-dimensional flow depending up on the number
of independent space coordinate & required to describe the flow.
When the dependent variables (example, velocity, pressure density etc) are a function of
one space co-ordinate say x- coordinate) it is known as one-dimensional flow.
Example of one –dimensional flow (1D): flow through pipes & channels, between
boundaries, etc. if the velocity distribution is considered constant at each cross-section.
‘’ One-dimension’’ is taken along the central streamline of the flow dependent variables
vary only with x- direction (or s- direction).
Fig 4.1 One-dimensional flow in a pipe
Arba Minch University WTI Leacture Notes Prepared Otoma 53
Hydraulics I and Hydraulics II Notes
When the dependent variables vary only with two-space coordinates, the flow is known
as two-dimensional flow (2D).
Example: Flow over a weir
Fig 4.2 Two-dimensional flow over a weir
Generally, a, fluid is a rather complex three- dimensional, time dependent phenomenon,
i.e., V= V (x, y, z, t). In almost any flow situation, the velocity field actually contains all
three-velocity components (u, v, w) & each is a function of all three-space coordinates (x,
y, and z).
Example of a 3D flow: the flow of air past an airplane wing provides a complex threedimensional flow.
4. 1.1 Velocity & Acceleration in a fluid flow
In general, fluids flow from one point in space to another point as a function of time. This
motion of fluid is described in terms of the velocity & acceleration of the fluid particles.
At a given time, instant, a description of any fluid property (such as density, pressure,
Velocity, & acceleration) may be given as a function of the fluids location.
i.e. V = u (x, y, z, t) i +v (x, y, z, t) j + w (x, y, z, t) k
An infinitesimal change in velocity ( u ) is given by:
u
u
u
u
u
x
y
z
t
x
y
z
t
The acceleration components are given by:
u
u
u
u
v
w
x
y
z
t
v
v
v
v
ay u
v
w
x
y
z
t
az u
v
w
x
y
y
t
ay, ay & az are called total or substantial acceleration in the x, y & z direction, the
components are called convective acceleration excluding the last expression
u v
Which are called local acceleration
,&
,
t
t t
ax u
Arba Minch University WTI Leacture Notes Prepared Otoma 54
Hydraulics I and Hydraulics II Notes
Total acceleration a a x i a y j a z k
Convective acceleration – it is instantaneous space rate of change of velocity,
Local acceleration: - it is the local time rate of change of velocity,
Example1: A fluid flow is described by the velocity field:
V = 5x 3 j - 15 x2 y j + t k. Evaluate the velocity & acceleration components at pints
(1, 2, 3, 1)
4.1.
Describing the pattern of flow
Although fluid motion is complicated, there are various concepts that can be used to help
in the visualization & analysis of flow fields. This pattern of flow may be described by
mean of streamlines, stream tubes, path lines and streamlines.
Stream lines: - it is an imaginary curve drawn through a flowing fluid in such a way that
the tangent to it at any point gives the direction of the velocity of flow at those points.
Fig. 4.4 streamlines
Since the velocity vector is everywhere tangent to the streamlines, there can be no
component of velocity at right angles to the streamlines and hence there is no flow across
the streamlines.
Since the instantaneous velocity at a point in a fluid must be unique in magnitude &
direction, the same point can’t pass more than one streamlines. Therefore, streamlines
don’t cross or intersect each other.
The velocity vector at point p must be tangent to the streamline at that point.
v
V
θ
u
Therefore,
dy
v
tan
dx
u
Arba Minch University WTI Leacture Notes Prepared Otoma 55
Hydraulics I and Hydraulics II Notes
u dy vdx 0 …………. Equation of streamlines
Example: - Given the velocity field:
V = 5x3 i – 15x 2 y j
Obtain the equation of the streamlines.
Stream tube: - is a tube imagined to be formed by a group of streamlines passing
through a small closed curve.
- A fluid can enter or leave a stream tube only at its ends
Fig. 4.4 A stream tube
Path line: - a path line is a line traced out by a given single fluid particle as it moves
from one point to another over a period of time.
In steady flow path lines & streamlines are identical.
Streak lines: - A streak line consists of all particles in flows that have previously passed
through a common point. They can be obtained by taking instantaneous photographs of
marked particles that all passed through a given location in the flow field at some earlier
time.
In experimental work often a color or a dye is injected in the flowing fluid, in order to
trace the motion of the fluid particles. The resulting trail of color is known as streak lines.
For steady flow, each successively injected particle follows precisely behind the previous
one, forming a steady streak line that is exactly behind the previous one, forming a steady
streak line that is exactly the same as the streamline through the injection point.
Hence, path line, streamlines & streak lines are the same for steady flows.
4.3 Types of flow
A. Classification according to type of fluid
(i)
Ideal fluid flow – the fluid is assumed to have no viscosity. The velocity
distribution is thus assumed uniform ---- (idealized)
(ii)
Real fluid flow: viscosity is taken in to consideration, which leads to the
development of shear stress b/n moving layers. However, some fluids such as
water are near to an ideal fluid, and this simplifying assumption enables
mathematical methods to be adopted in the solution of certain flow problems.
(iii) Compressible fluid flow: - if variation of pressure results in considerable
changes in volume & density. Gases are generally treated as compressible.
(iv)
Incompatible fluid flow - if extremely large variation in pressure is required to
affect very small changes in volume. Liquids are generally treated as
incompressible.
Arba Minch University WTI Leacture Notes Prepared Otoma 56
Hydraulics I and Hydraulics II Notes
B. Classification according to variation of velocity, displacement and etc.
(i)
Steady flow: - A flow is said to be steady if at any point in the flowing fluid
characteristic such as velocity, pressure, density etc. don’t change with time.
However, this characteristic may be different at different points in the flowing
fluid.
v
p
0,
0 , etc
t
t
(ii)
Unsteady flow: - if at any point in the flowing fluid any one of all of the
characteristics, which describes the behavior of fluids in motion changes with
time.
v
p
0,
0 , etc
t
t
Uniform flow: - this occurs when the velocity both in magnitude & direction
remains constant with respect to distance, i. e it doesn’t change from point to
point
v 0
s
Example: flow of fluid under pressure through long tube of constant diameter.
Non- uniform flow: - if there is a change in velocity either in magnitude or
direction with respect to distance, then:
(iii)
(iv)
v
0
s
(v)
Laminar flow: - in laminar flow the particles of fluid move in orderly manners
& the steam lines retain the same relative position in successive cross section.
Laminar flow is associated with low velocity of flow and viscous fluids.
(vi)
Turbulent flow: - Here the fluid particles flow in a disorder manner occupying
different relative positions in successive cross section. Turbulent flow is
associated with high velocity flows.
Around 1883, Reynolds established the boundary between the laminar and turbulent
flow, using the dimensionless number called Reynolds’s number, Re.
Re =
VD
Where V- mean velocity
D- Diameter
- Kinematics viscosity
Reynolds showed that if
Re < 2000 ---- laminar flow
Re> 4000 ----- Turbulent
In b/n 2000 & 4000 it is transition flow.
Arba Minch University WTI Leacture Notes Prepared Otoma 57
Hydraulics I and Hydraulics II Notes
4.2. Continuity Equation
Fixed region
The continuity equation is a mathematical statement of the principle of conservation of
mass. Consider the following fixed region with flowing fluid. Since fluid is neither
created nor destroyed with in the region it may be stored that the rate of increase of mass
contained within the region must be equal to the differences b/n the rate at which the fluid
mass enters the region & the rate of which it leaves the region.
Mass of fluid
entering the region
Mass of fluid leaving
the region
However, if the flow is steady, the rate of increase of the fluid mass with in the region is
equal to zero; then the rate at which fluid mass enters the region is equal to the rate at
which the fluid mass leaves the region.
Considers flow through a portion of a stream tube:
dA2
V2
2
2
1
1
dA1
V1
At section-1
Area of elementary tube = dA1
Average velocity = V1
Density = 1
Mass of fluid per unit time flowing past section-1 = 1* dA1* V1 [ kg/s ]
At section-2
Area of elementary tube= dA2
Average velocity = V2
Density = 2
Mass of fluid flowing per unit of time past section 2 = 2 *dA2 *V2 [ kg/s ]
For steady flow, by the principle of conservation of mass
Arba Minch University WTI Leacture Notes Prepared Otoma 58
Hydraulics I and Hydraulics II Notes
1 dA1 V1 = 2 d A2 V2
For the entire area of the stream tube:
1
dA1 V1
A1
2 dA 2 V 2 = constant
A2
If 1 and 2 are average densities at section (1) and (2), then
1 V1 dA1 2 V2 dA2 VA = constant
A1
A2
1V1A1 = 2V2A2 = VA = constant
This is equation of continuity applicable to steady, one-dimensional flow of compressible
as well as incompressible (1 = 2) flow.
For incompressible flow, = constant and doesn’t vary form point to point, 1 = 2
A1V1 = A2V2 = Q = constant
This is continuity equation for steady incompressible flow.
Q is the discharge (or volumetric flow rate or flow) defined as
Q = AV [m2m/s = m3/s = Volume/time]
Q
Q
Q = A1V2 = A2V2 --- V1
, V2
A1
A2
Hence, the velocity of flow is inversely proportional to the area of flow section. This is
useful for most engineering application.
The general equation of continuity for three dimensional (3D) flow can be derived as
follows.
Consider a flow through a rectangular parallelepiped of dimensions: x, y, z
Y
y
u
u
x
z
( u )
x
x
X
Z
Fig. 4.5 Derivation of a differential equation of continuity
The mass of fluid flowing per unit time through the left face ABCD:
Arba Minch University WTI Leacture Notes Prepared Otoma 59
Hydraulics I and Hydraulics II Notes
u y z
The mass of fluid flowing out of the parallelepiped through face A’B’C’D’:
( u
( u )
x)yz
x
The net mass of fluid that remain in the parallelepiped per unit time:
( u )
u y z u y z (
x)yz
x
( u )
xyz
x
By similar procedure the mass of fluid remaining in the others two pairs of faces (Y, Z –
directions)
v x y z
Y- direction =
y
w x y z
Z- direction =
z
The net total mass of fluid that remains in the parallelepiped per unit time is:
u v
w
x y z 1
y
z
x
The mass of fluid in the parallelepiped is:
x y z
its rate of increase with time is:
t
x y z
x y z 2
z
Equating 1 & 2 we get:
v w
( u )
x
y
z
t
u
w
v
0
t
y
x
z
(General continuity equation in 3D Flow)
Arba Minch University WTI Leacture Notes Prepared Otoma 60
Hydraulics I and Hydraulics II Notes
v r
V
t
t
rr
r
For steady flow,
V z
0
In Cylindrical coordinate system
z
0
t
u
w
v
0
x
y
z
(Steady compressible fluid)
For incompressible flow, doesn’t change with x, y, z, and t
= constant
u
v w
0
x
y
z
- (Continuity equation for incompressible, steady
flow in 3D)
4.4 Stream function ( ) and velocity potential ()
Stream function ( )
Stream function ( ) (psi) is the mathematical postulation such that its differentiation
with respect to x gives the velocity in y-direction (generally taken as –ve) and its
differentiation with respect to y gives the velocity in x-direction.
u
y
;
v
x
Some of the salience characteristics of a stream function are enumerated below:
Since is a function of x and y, its total differential is
d
dx
dy vdx udy --------------------------1
x
y
Further, for a two-dimensional motion parallel to x-y plane the streamline for an
incompressible fluid is prescribed as:
v dy
; udy vdx 0 ----------------------------------------2
u dx
From equation 1 and 2 it follows that
d 0 or cons tan t
Arba Minch University WTI Leacture Notes Prepared Otoma 61
Hydraulics I and Hydraulics II Notes
i.e., the stream function is constant along a streamline. The streamlines are thus lines of
constant stream function. However, the stream function varies from one streamline to
another. Each streamline of flow pattern can be represented as:
1 C1 ; 2 C2
Substitute for u and v in terms of stream function in the continuity equation
for an incompressible fluid:
u v
0
x y
x y
0
y x
2 2
0
xy xy
This is true. And hence, the stream function satisfies the equation of continuity.
Let A and B be the two points lying on the streamlines prescribed by stream function
and d , respectively. From the figure below, the velocity vector V
perpendicular to line AB has components u and v in the direction of x and y-axis
respectively. From continuity consideration:
Fig 4.6 Mathematical and physical concept of stream function
Flow across AB = flow across AO + flow across OB
Vds vdx udy
The minus sign indicates that the velocity v is acting in the downward direction.
Vds
i.e.
dx
dy d
x
y
dq d
Evidently, the stream function can also be defined as the flux or flow rate between two
streamlines. The units of are m2/s; discharge per unit thickness of flow.
The line joining the points A and B may be AMB or ANB but the discharge between the
two streamlines will remain the same. The quantity of fluid flowing past the line AB’
would also remain same provided no fluid enters or leaves between the points BB’.
Apparently, the fluid flow is unaffected by the shape of the line between A and B.
Velocity potential ()
A fluid element in the shape of cube, which is initially at one position, will move to
another position during a short time interval dt. because of generally complex velocity
variation within the field, we expect the element to not only translate from one position
but change in shape (angular deformation). The form of movement may be in the form of:
a) Translation or rotation and
b) Volume dilation or angular deformation
Arba Minch University WTI Leacture Notes Prepared Otoma 62
Hydraulics I and Hydraulics II Notes
Translation: - means simply picking up the element and moving a distance during a
small time dt.
Rotation: - is defined as the average angular velocity of two elements originally at right
angles to each other.
Flow is described rotational if every fluid element rotates about its axis which is
perpendicular to the plane of motion.
Consider a rectangular fluid element occupying the position ABCD at a certain time in a
two-dimensional x-y plane in the figure below. The velocity components in the xu
direction at points A and D are u and u dy respectively. Since these velocities are
y
different, there will be an angular velocity developed for the linear element AD. Similarly
v
the velocity components in y-direction at points A and B are v and v dx
x
respectively, and these different velocities will result in to an angular velocity of the
linear element AB. Apparently during the time interval dt the element AB and AD would
move relative to point A, the fluid element gets displaced and occupies the dotted
position AB’C’D’.
y
u
u
dy
y
v
v
dθ2
v
dx
x
dy
dθ1 u
dx
x
Fig.4.7 Rotation of fluid element
Taking the counter clockwise direction as positive:
The angular velocity of element AB about the z-axis is
ωAB = angular displacement of element AB per unit time
d
1
dt
v dx.dt
x
From the figure, tand1 d1=
(for the horizontal element dx).
dx
Arba Minch University WTI Leacture Notes Prepared Otoma 63
Hydraulics I and Hydraulics II Notes
AB
d1 v
dt
x
The angular velocity of element AD about the z-axis is
ωAD = angular displacement of element AD per unit time
d
2
dt
u dy.dt
y
u dt
tan( d 2 ) d 2
dy
y
d
u
AD 2
dt
y
Average of the angular velocity of line AB (dx element) and line AD (dy element)
gives the rotation ωz of the element ABCD about z-axis.
i.e.,
v u
z 1 2
x y
Rotations about the other two axes are defined as:
w
v
x 1 2
y
z
u w
y 12
z x
Angular velocity is a vector quantity:
xi y j z k
Where ωx, ωy and ωz - are rotation components
irrotational flow: occurs when the cross-gradient of the velocity (or shear) are zero or
cancel each other. i.e., the fluid element has a zero angular velocity about its own
mass Centre.
v u
i.e., z 1 2 = 0 (for two-dimensional flow)
x y
Velocity potential (phi) is a function such that its derivative in any direction gives the
velocity in that direction.
i.e. u
; v
x
y
Lines of constant potential function are termed as equipotential lines.
Arba Minch University WTI Leacture Notes Prepared Otoma 64
Hydraulics I and Hydraulics II Notes
is a function of x and y alone, its total differential is
d
dx
dy udx vdy
x
y
for an equipotential line, the potential function is constant
i.e.,
d
dx
dy udx vdy 0
x
y
dy
v
dx
u
Which prescribes the slope of equipotential line at any point?
For two dimensional (x-y plane), Irrotational flow:
v
u
z 1 2 0
x y
0
x y y x
2
2
0
yx xy
For continuity equation:
u
x
2
x 2
v
y
2
y 2
w
z
0
2
z 2
0
This equation is known as Laplace’s equation.
The in viscid, incompressible, Irrotational flow fields are governed by Laplace’s
equation.
The above discussion with reference to stream function and velocity potential function
leads us to conclude that:
- Stream function applies to both rotational and irrotational flows. The flow has
only to be steady and incompressible,
- Potential function exists only for irrotational flow,
- For irrotational flow, both stream function and the velocity potential function
satisfies Laplace equation; consequently, they are interchangeable. We have the
following important relationships between the stream function and potential
function for a steady, irrotational and incompressible fluid flow.
Arba Minch University WTI Leacture Notes Prepared Otoma 65
Hydraulics I and Hydraulics II Notes
u
; v
-----------------Cauchy-Riemann equation
x y
y
x
Orthogonality of streamlines and equipotential lines
Stream function of x and y, its total differential is
d
dx
dy
x
y
But the stream function ( x, y) is a constant along a streamline,
i.e.,
d
dx
dy 0
x
y
dy
v
x
dx
u
y
The slope of a streamline for constant is
dy v
---------------------i
dx u
Further is a function of x and y, and therefore its total differential is
dx
dy
x
y
But the potential function ( x, y) is constant along an equipotential line
i.e.,
d
dx
dy 0
x
y
d
dy
u
x
dx
v
y
The slope of an equipotential line for constant is
dy
v
--------------------------ii
dx
u
Combining expressions i and ii
Slope of streamline * slope of equipotential line
v u
* 1 --------------------------------*
u v
Arba Minch University WTI Leacture Notes Prepared Otoma 66
Hydraulics I and Hydraulics II Notes
This equation is a mathematical statement of the fact that equipotential lines are normal
to the streamlines. The orthogonality between the streamlines and equipotential lines
serves to draw a flow net.
Flow Net
Flow net is a graphical representation of streamlines and equipotential lines for a
potential flow. Flow nets are drawn to indicate flow patterns in case of two-dimensional
floe, or even three-dimensional flow. The flow net consists of
- a system of streamlines so spaced that the rate of flow q is the same between each
successive pair of lines, and
- another system of lines normal to the streamlines and so spaced that the distance
between the normal lines equals the distance between adjacent streamlines.
Streamlines and equipotential lines are drawn between the flow boundaries with the
requirements that they form small squares.
CHAPTER 5
FLUID DYNAMICS
5.1 Introduction
In discussing about hydrostatics we were concerned with forces (pressure forces) which
are acting on an object for a liquid at rest and when we deal with kinematics of fluid flow
phenomena related with space time variation (velocity and acceleration) without
considering the effect of force. But in dealing with dynamics of fluid flow, all forces that
affect the phenomenon are considered.
The dynamics of fluid motion deals with kinetics, which relates the kinematics with the
forces responsible for causing the motion. This relationship of fluid motion is established
by the use of laws of nature.
i)
The principle of conservation of mass (the continuity relationship)
ii)
Newton’s laws of motion
iii)
The 1st and second lows of thermodynamics
5.2 Equations of motion
The dynamic behavior of fluid motion is governed by a set of equations, known as
equations of motion. These equations are obtained by using the Newton’s second low,
which may be written as Fx = m.ax
Where, Fx is the net force acting in the x-direction upon a fluid element of
mass m producing an acceleration ax in the x-direction.
The forces which may be present in fluid flow problems are gravity forces F g, pressure
force Fp, force due to viscosity Fv, force due to turbulence Ft, Surface tension Fs, and
force due to compressibility of fluid Fc.
Gravity forces (Fg.) is due to the weight of the fluid. Its component in flow direction
results in acceleration.
Arba Minch University WTI Leacture Notes Prepared Otoma 67
Hydraulics I and Hydraulics II Notes
Pressure force (Fp): It is equal to the product of pressure intensity and cross sectional area
of the flowing fluid. Acts normal to the surface under consideration and produces
acceleration in the given direction.
Viscous forces (Fv): - Exists in real fluids. It is the shearing resistance generated when
there is relative motion between two layers of fluids. It acts opposite to the direction of
motion, and retards flow.
Surface tension (Fs): This force is important when the depth of flow is extremely small.
Force due to compressibility (Fc): for incompressible fluids, this becomes significant in
problems of unsteady flow like water hammer. In most of flow problems, Fs and Fc are
neglected.
Force due to turbulence (Ft): the continuous momentum transfers between layers in
highly turbulent flow results in normal and shear stresses known as Reynolds's stress.
If the changes for the change in forces are small the forces can be taken negligible.
max = (Fg)x+(Fp)x+(Fv)x+(Ft)x
The presence of such a complex system of forces in real fluid flow problems makes the
analysis very complicated. Therefore, mathematical analysis of problems is generally
possible only if certain simplifying assumptions are made.
5.2.1 Energy and Head
A liquid in motion may possess three forms of energy.
1. Potential energy /elevation /positional energy/ because of its elevation above datum
level. If a weight w of liquid is at a height of z above datum
Potential energy = Wz
Potential energy per unit weight = z (meters) = Potential head
2. Pressure energy: When a fluid flows in a continuous stream under pressure it can do
work. If the area of cross – section of the stream of fluid is a, then force due to
pressure p on cross- section is Pa.
If a weight w of liquid passes the cross section.
Volume passing in cross section = W/ρg
W
Distance moved by liquid =
ga
W
WP
W = F* S = Pa *
ga
g
P
Pressure energy per unit weight =
= pressure head.
g
3. Kinetic energy
If a mass of fluid (m) moves at some velocity (v),
Kinetic energy = ½ mv2 = ½ W/g v2
v2
Kinetic energy pr unit weight =
= kinetic head
2g
Total head = potential head + pressure head + velocity head = Z
P
v2
2g
Arba Minch University WTI Leacture Notes Prepared Otoma 68
Hydraulics I and Hydraulics II Notes
Bernoulli’s theorem states that the total energy of each particle of a body of fluid is the
same provided that no energy enters or leaves the system at any point. The division of
this energy between potential, pressure and kinetic energy may vary, but the total remains
constant. In symbols
Z
P
v2
cons tan t
2g
5.3 Bernoulli’s Equation
Consider a cylindrical element of stream tube having cross-sectional area dA length ds
unit weight as shown in motion along a streamline.
[P (
ds
dP
) ds ]dA
ds
PdA
Z
dsdA
Fig: 5.1 Pressure and gravity forces on a cylindrical element along a streamline
The normal forces on the side faces are in equilibrium and as the fluid is assumed nonviscous, there is no shear stress. The velocity varies along the streamline and there is
acceleration. It is necessary to take into account force due to acceleration when
considering the longitudinal balance of force.
But in the ease of steady flow the velocity doesn’t vary at a point so that local
v
acceleration will be zero 0 but for velocity variation with position convective
t
v
acceleration will be different from zero V
0 . The forces tending to accelerate the
s
fluid mass are pressure force on the two ends of the element,
[ Fs mas ] Summation of force in the arbitrary’ direction.
Arba Minch University WTI Leacture Notes Prepared Otoma 69
Hydraulics I and Hydraulics II Notes
dp
PdA p
ds dA dp dA
ds
Weight in the direction of motion,
gdsdA cos gdsdA
dz
gdAdz
ds
Applying Newton’s 2nd Law of motion F=ma
dPdA g dA dz ds dAV
dp
gdz Vdv 0
dv
ds
as as
v v
V
t
s
One-dimension Euler’s equation
It can be applied for both compressible and incompressible flow.
dp
V
dv 0
g
For the case of an incompressible fluid may be treated as constant, the integration gives
dz
dp
dz V
dV
Cons tan t
g
V2
Cons tan t [Bernoulli’s Equation]
2g
Under special conditions the assumption underlying Bernoulli’s equations can be waived.
1. When streamlines originate from a reservoir,
2. For unsteady flow with gradually changing conditions (E.g. Emptying a reservoir)
the equation may be applied without appreciable error,
3. It may be used for real fluids, by modifying the result experimentally.
P
Z
The Bernoulli equation is the basis for the solution of a wide range of hydraulics
problems. For two points along a streamline, the Bernoulli equation may be expressed in
the form of:
2
2
P
v
P
v
y1 1 1 y 2 2 2
2g
2g
5.3.1 Bernoulli’s Equation for real fluid
v2
is determined for an incompressible
2g
ideal fluid without taking in to account the effects of some other forces as viscous, etc.
In case of real fluid these forces should be introduced so that the equation needs some
modification. A real fluid does possess viscosity and consequently it offers resistance to
The Bernoulli’s equation expressed by
p
Z
Arba Minch University WTI Leacture Notes Prepared Otoma 70
Hydraulics I and Hydraulics II Notes
flow. In order to overcome this viscous resistance and other resistances due to surface
roughness and turbulence, some part of the total energy of the flow is lost. [Energy is
neither created nor destroyed but may be changed to heat energy increasing temp of the
fluid]
The increase in temperature of the fluid causes an increase in the internal energy. The
increase in internal energy and the heat transfer from the fluid represent a loss of useful
energy. The total loss per unit mass of fluid is (u2-u1-q).
u u q
Energy loss per unit weight in overcoming resistance hl 2 1
(head loss)
g
The total energy of flow decreases in the flow direction, and consequently the energy line
has a down ward slope.
Horizontal
h1
V12/2g
The modified Bernoulli’s equation for upstream
section (1) and downstream section (2)
2
V2 /2g
P1/
V12 P1
V2 p
Z1 2 2 Z 2 hl
2g
2g
hl = head loss between the two sections.
P2/
1
2
Z1
Datum
Z2
2
v1
2g
EGL
HL = head loss
2
v2
2g
HGL
p1
p2
Z1
Z2
Datum
Fig.5.2 Energy & hydraulic grade lines
5.3.2 Energy correction factor
The analysis of flow problems is usually based on the one-dimensional approach. The
entire flow is considered to be taking through stream tube with average velocity V at
center of each cross-section. The velocity distribution at any x-section in real fluid flow is
Arba Minch University WTI Leacture Notes Prepared Otoma 71
Hydraulics I and Hydraulics II Notes
non uniform, on account of the boundary resistance and consequently the kinetic energy
per unit weight given by V2/2g doesn’t represent the kinetic energy across the section.
In order to compensate for the discrepancy a coefficient known as energy correction
factor denoted by is used. The multiplication of with V2/2g yields the kinetic energy
actually passing a section.
For the figure given,
Ideal liquid
Real liquid
flow
flow
dA
Velocity
distribution
Fig.5.3 Velocity distribution in a pipe flow
Vavg
The kinetic energy per unit time passing through on elemental area dA is ½ (dAu)u2
u - velocity at that point
Total kinetic energy passing the section
3
12 u dA And the actual kinetic energy passed on average velocity V passing the
A
1
V 3 A
2
From the two equation
section is equal to
3
1 u
dA
A v
Kinetic energy correction factor is a measure of viscous resistance generated in a given
flow, the effect of which is reflected uniform nature of velocity distribution. For a given
pipe, it can be shown that its magnitude is a function of the type of flow and its turbulent
characteristics.
Laminar flow is purely a viscous flow; the value of is maximum and equals 2.0. But in
case of fully developed turbulent flow in pipes, is independent of Reynolds number and
may be considered to have almost constant value (1.01 to 1.15) depending on surface
roughness and Reynolds number. Lower value is appreciable for velocity rough surface
and high Reynolds number.
V2 p
V2 p
1 1 1 Z1 2 2 2 Z 2 h
2g
2g
For an identical velocity distribution at two sections, 1 = 2, and if accuracy is not
required in non-uniform velocity distribution = 1.
5.3.3 Practical Applications of Bernoulli’s Equation
Bernoulli’s equation is applicable in all problems of incompressible fluid flow where
energy considerations are involved. In addition, it is practically applied for flow
measurement using the following measuring devices.
1. Venturimeter (tube) (G.B Venturi (1746 –1822) Italian Eng)
Arba Minch University WTI Leacture Notes Prepared Otoma 72
Hydraulics I and Hydraulics II Notes
It is a device used for measuring rate of flow in a pipeline and it consists of three
components:
i)
A converging entrance cone of angle of about 200
ii)
A cylindrical portion of short length called the “throat”
iii)
A diverging section known as diffuser, of cone angle 50 to 70 to ensure a
minimum loss of energy, but where this is unimportant the angle may be as
large as 140.
The entrance tube and exit tube diameter are the same as that of the pipe line in to which
it is inserted and the length of throat is equal to the throat diameter.
Fig.5.4 Horizontal Venturimeter
Assuming that the fluid is ideal (So that energy is not dissipated in overcoming frictional
resistance) and that the velocities V1 and V2 at the inlet and throat respectively, are
uniformly distributed over the cross section (so that the energy correction factor is 1).
Applying Bernoulli’s equation between points (1) and (2) on a central stream line and
assuming no frictional resistance,
V12 P1
V22 P2
Z1
Z2
2g
2g
For an incompressible fluid, continuity of flow at section 1 and 2 is,
Q = A1V1 = A2V2
A
V2 1 V1 ………………………. (a)
A2
If A1 > A2, V1 < V2 i.e. KE at section 2 (throat) > KE at section 1(the entrance)
P at throat < P at entrance
For a horizontal Venturimeter,
Arba Minch University WTI Leacture Notes Prepared Otoma 73
Hydraulics I and Hydraulics II Notes
V2 V1
P P
1 2 ......(b)
2g
g
Substituti ng equ (a) in to eqn (b)
2
2
V1
2g
2
A 2 P P
1 1 1 2
g
A2
V1
V1
1
2
A1
1
A2
A2
A A
2
1
2
2
P P
* 2 g * 1 2
g
2g
P1 P2
g
Theoretical Discharge
Qt A1 V1t
A1 A2
A21 A2
2
2g
P1 P2
g
The theoretical discharge can be converted to actual discharge (Qa) by multiplying
Qa Cd * Qt CdA1 V1t Cd
A1 A2
A
2
1
A2
2
2g
P1 P2
g
The differential pressure is evaluated from manometry, and for figure.5.4
P1
P
s ys xs sm ( y x) 2 s
P1 P2
sm
1)
s
For vertical or inclined Venturi meter, the actual discharge can be computed similarly.
x(
2. Pitot tube (Total head tube) / (Henri Pitot)
Pitot tube is a device used for measuring velocity of flow at any point in a pipe or a
channel. In its elementary form a Pitot tube consists of an L-shaped tube with open ends.
It’s may be aligned in open channel or pipe flow measurement as indicated below.
Arba Minch University WTI Leacture Notes Prepared Otoma 74
Hydraulics I and Hydraulics II Notes
Stagnation pressure
For a figure below it has been seen that the central streamline terminates
at B the entrance to the Pitot tube. This is on account of the inability of the
streamline to take a sudden turn. The fluid flowing along the central
streamline, therefore, stops moving as it reaches the point B. Hence the
velocity of flow at this point is zero. This point is known as stagnation
point.
Applying the Bernoulli’s equation at points A and B, we obtain
PB = PO = PA+VA2/2. The pressure at the stagnation point is known as
stagnation pressure composed of static pressure PA and dynamic pressure
VA2/2.
If the measurement is made on an open channel flow the surface will be exposed to the
air and there is no static head from the surface, and if measurement is made on pipe flow
there will be static head at A.
Fig.5.5 Simple Pitot tube in pipe flow and open channel flow
Applying Bernoulli’s equation to point A in the undisturbed flow region and the
stagnation point B we have
2
2
VO
PO
VA
P
ZO
A ZA
2g
2g
2
PO
VA
P
A
2g
VA
P PA
O
2g
2
VA
2
PO PA 2 g V
A
2g (
PO PA
)
2 gh
sin ce
PO PA
h
Arba Minch University WTI Leacture Notes Prepared Otoma 75
Hydraulics I and Hydraulics II Notes
A perfect Pitot tube should obey this equation exactly, but all actual instruments must be
calibrated and a correction factor applied to make allowance for the small effects of nose
shape and other characteristics.
Practically it is difficult to read h from a free surface. To overcome this difficulty, the
static tube and the Pitot tube may combine in one instrument (differential U-tube).
For finding the velocity at any point in a pipe by Pitot tube, the following arrangements
are adopted.
1. Pitot tube along with a vertical piezometer tube as shown in Fig.5.6
2. Pitot tube connected with piezometer tube as shown in Fig.5.7
3. Pitot static tube, which consists of two circular concentric tubes one inside the
other with some annular space in between as shown in Fig.5.8. The outlets of
these two tubes are connected to the differential manometer where the difference
of pressure head is measured by knowing the difference of the levels of the
manometer liquid hm.
h
Piezometer
Tube
Pitot
tube
Fig.5.6
Fig.5.7
Fig.5.9
The Pitot tube measures the velocity of only a filament of liquid, and hence it can be used
for exploring the velocity distribution across the pipe cross-section. If, however, it is
Arba Minch University WTI Leacture Notes Prepared Otoma 76
Hydraulics I and Hydraulics II Notes
desired to measure the total flow of fluid through the pipe, the velocity must be measured
at various distances from the walls and the results integrated. The total flow rate can be
calculated from a single reading only if the velocity distribution across the cross-section
is already known.
The static tube measures the static pressure, since there is no velocity component
perpendicular to its opening and the impact tube measures both the static and impact
pressure (due to kinetic energy). Impact tube head = pressure head + velocity head.
3. Orifices
An orifice is an opening (usually circular) in the wall of a tank or in a plate normal to the
axis of a pipe, the plate being either at the end of the pipe or in some intermediate
location and used for measuring rate of flow out of a reservoir (tank) or through a pipe.
a. Orifice flow in pipes, Orifice meter or orifice plate
The Venturi meter described earlier is a reliable flow-measuring device. Furthermore, it
causes little pressure loss. For these reasons it is widely used, particularly for largevolume liquid and gas flows. However, this meter is relatively complex to construct and
hence expensive. Especially for small pipelines, its cost seems prohibitive, so simpler
devices such as orifice meters are used.
Fig.5.9 Orifice meter
The orifice meter consists of a flat orifice plate with a circular hole drilled in it. There is a
pressure tap upstream from the orifice plate and another just downstream.
Arba Minch University WTI Leacture Notes Prepared Otoma 77
Hydraulics I and Hydraulics II Notes
Fig.5.10 Orifice plate in a pipe
Applying the Bernoulli equation between at 1 (upstream of plate) and 2 (at the orifice)
2
P1
2
V
P
v
1 2 2 Since the orfice is horizontal Z 1 Z 2
2g
2g
V1 V2
2g
2
2
P2 P1
A1v1 A2 V2
Using continuity equation
v1 A1 / A2 2 v1
2g
2
v1
2
2
1 ( A1 / A2 ) 2
2g
A
V2 1 V1
A2
P2 P1
p p1
2
V1
p 2 p1
2g
*
2
1 ( A1 / A2 )
The theoretical discharge Q will therefore be,
Q = A1V1 =A1
p2 p1 *
p
2
1 ( A1 / A2 ) 2
The actual discharge will be less than the theoretical since the effective flow area near P2
tapping will be less than A2, the fluid forming a neck or vena contracta. In addition,
there will be some loss of energy between point 1 and 2.
The actual discharge can be determined by determining coefficient of discharge.
b. Flow through a reservoir opening (orifice flow)
For a reservoir at water level h above orifice opening shown in the following figure. The
reservoir is assumed to be very large as compared to size of the opening, so that the
velocities of all points in the reservoir are negligibly small.
3
Arba Minch University WTI Leacture Notes Prepared Otoma 78
Hydraulics I and Hydraulics II Notes
Fig. 5.11 Small orifice in the side of a large reservoir
Applying Bernoulli’s equation and neglecting losses between A and B (taking the datum
level at the center of the orifice),
0+0+h =
V2
0 0
2g
V = 2 gh (Theoretical velocity). Where h is the depth of center of
orifice below the free surface. Evidently, the velocity of efflux is equal to the velocity of
free fall from the surface of reservoir. This is known as Torricelli’s theorem. In real
fluid flows, there is always some loss of energy due to viscous effects and accordingly
the actual velocity will be less than the theoretical velocity.
Hydraulic Coefficients for flow through orifices
Area of jet at vena contracta
Area of orifice
Actual velocity at vena contracta
Cv =
Theoretica l velocity
1) Coefficient of contraction, Cc =
2) Coefficient of velocity,
3) Coefficient of discharge,
Cd =
V
2 gh
Actual disch arg e
Theoretica l disch arg e
Theoretical discharge, Qt = Ao
2 gh
Where Ao = Area of orifice (Area of jet at C)
Actual velocity, Va = Cv
2 gh
As shown in the figure, the paths of the particles of the liquid converge on the orifice so
that the area of the issuing jet is less than the area of the orifice. In the plane of the
orifice, the particles have a component of velocity towards the center so that at C the
pressure is greater than atmospheric pressure. It is only at B a little outside the orifice that
the paths of the particles become parallel. The section through B, which is the section of
least cross-section and hence of maximum contraction, is called the vena contracta.
Area of vena contracta, AB = CcAo (The actual area of the jet is the area of the vena
contracta not the area of the orifice.)
Therefore, Actual discharge Qa = Actual area of jet * Actual velocity
Qa CcAo * Cv 2gh
It is customary to combine the two coefficients into a discharge coefficient Cd.
(Cd = Cv Cc)
Qa = Cd A0 2 gh
Arba Minch University WTI Leacture Notes Prepared Otoma 79
Hydraulics I and Hydraulics II Notes
Determination of hydraulic coefficients of orifice
Determination of Cd
By measuring area A0, the head h and the discharge Qa (by gravimetric or volumetric
means), Cd is obtained using the above equation. Determination of either Cv or Cc then
permits determination of the other by the equation Cd = Cv Cc.
Determination of Cc and Cv
1) Trajectory method
The equation for the trajectory may be obtained by applying Newton’s equation of
uniformly accelerated motion to a particle of the liquid passing from the nozzle to point
P, whose coordinates are (x, y) in time t. Then x = Vxot and z = Vzot - 1/2gt2. Evaluating t
from the first equation and substituting in the second gives
V
g
z z0 x
x2
2
Vx 0
2Vx 0
If the jet is initially horizontal, as in the flow from a vertical orifice, Vx0 = V0 and Vz0 = 0,
the above equation is reduced in to;
g
V0 = x
2z
Then Cv =
V0
Vt
V0
2 gH
x
2 z / g 2 gh
x
4 zh
2) Pitot tube method
Pitot tube can be set at the vena contracta so that actual velocity Va is determined.
3) Calipers method
The diameter of the jet at the vena contracta can be approximately measured using an
outside caliper. However, this method is not precise and is less satisfactory than other
methods.
Arba Minch University WTI Leacture Notes Prepared Otoma 80
Hydraulics I and Hydraulics II Notes
Types of Orifice
The following figure shows common types of orifice with their coefficient of discharge.
Fig.5.12 Types of orifice
The orifices are classified based on of their size, shape, nature of discharge and shape of
the upstream edge.
1.Depending upon their size: - small orifice and large orifice; If the head of liquid from
the center of the orifice is more than five times the depth of the orifice, the orifice is
called small orifice. If it less than five times it is known as large orifice.
2.Depending upon shape: - as circular, triangular, rectangular and trapezoidal
3.Depending upon shape of edge: - as sharp edged and round or bell mouthed orifice.
(Fig.5.14)
4.Depending up on the nature of discharge: - as free discharging & drowned or
submerged orifice; the submerged orifices are further classified as fully submerged
and partially submerged orifice
3. Unsteady orifice flow from reservoirs
The volume discharged from the orifice in time t is Qt, which must just equal the
reduction in volume in the reservoir in the same time increment t. AR(-y), in which AR
is the surface area of the reservoir at level y above the orifice.
y
y
Fig 5.13 Unsteady flow from reservoir
Arba Minch University WTI Leacture Notes Prepared Otoma 81
Hydraulics I and Hydraulics II Notes
Equating the two expressions:
Qt AR (y )
Solving for t and int egrating yields
A (y )
t R
Q
t
y 2 A y
R
dt
o
y1 Q
but Q C d Ao 2 gy
t
t
AR
C d Ao
y
2g
2 AR
C d A0
1 / 2
1/ 2
2g
(y
1
y
1/ 2
y )
2
This is the time for the liquid to fall from y1 to y 2 .
4. Weirs
Open channel flow may be measured by a weir or obstruction in the channel that causes
the liquid to back up behind it and flow over it or through it. There may be sharp crested
or broad crested based on their length along the channel section.
a) Rectangular weir
The following figure shows rectangular notch of crest length (L) and working under a
head H.
Fig. 5.14 Rectangular notch
By Torricelli’s theorem, the velocity of a particle discharged at any level h is 2 gh and
will therefore vary from top to bottom of notch. Considering a horizontal strip at depth h
and of thickness h
Discharge through strip dQ = 2 gh * Lh
Arba Minch University WTI Leacture Notes Prepared Otoma 82
Hydraulics I and Hydraulics II Notes
H
2
L 2g H 3 / 2
3
0
This is the theoretical discharge through a rectangular notch.
The value of Q given by the above equation is too high because no account has been
taken of energy lost and also because, as shown below there will be a substantial
reduction in the width and depth of the notch cross section because of the curved path
lines of the liquid.
Total discharge Qt L 2 g h1 / 2 dh
Fig 5.15 Effect of vena contracta in rectangular weir
Therefore, Actual discharge Qa, Qa
2
Cd L 2g H 3 / 2
3
From experiment, Cd = 0.62
Qa = 1.831LH3/2
b) Triangular weir (V-notch)
Fig. 5.16 Triangular weir
Since the velocity of flow through the notch varies from top to bottom, consider a strip of
thickness h at a depth h below the surface. If the velocity of approach is small:
Head producing flow = h
Velocity through strip = V = 2 gh
If width of strip = b, Area of strip = bh
Discharge through strip = Q = Vbh
The width b depends on h and is given by b = 2(H - h) tan
Arba Minch University WTI Leacture Notes Prepared Otoma 83
Hydraulics I and Hydraulics II Notes
Q (2 g )h1 / 2 x 2( H h) tan * h
2 2 g tan ( Hh1 / 2 h 3 / 2 )h
Integrating between the limits h = 0 and h = H
H
Q 2 2 g tan ( Hh1 / 2 h3 / 2 )dh
0
2
2
H
2 2 g tan Hh 3 / 2 h5 / 2
5
3
0
8
2 g tan H 5 / 2
15
This is the theoretical discharge.
8
2 g tan H 5 / 2
Actual discharge = Cd*Q = Cd
15
From experiment Cd = 0.58, Qa = 1.37 tan H5/2,
For 900 V-notch, Qa = 1.37 H5/2
5.4 Impulse-momentum theorem
It is often important to determine the force produced on a solid body by fluid flowing
steadily over it. For example, the force on a pipe bend caused by the fluid flowing
through it; the force exerted by jet of fluid striking against a solid surface; thrust on a
propeller. All these forces are hydrodynamic forces and they are associated with a
change in the momentum of the fluid.
The magnitude of such a force is determined by Newton’s second law of motion, by
modifying the law to suit particularly to the steady flow of a fluid called the steady flow
momentum equation. Only the forces acting at the boundaries of this space concern us,
and use of momentum equation doesn’t require the knowledge of the flow pattern in
detail. Moreover, the fluid may be compressible or incompressible and the flow with or
without friction.
Consider a stream tube shown below with the following assumptions
The c/s of stream tube is sufficiently small so that the velocity may
be considered uniformly distributed
The flow is steady i.e. the stream tube remains stationary with respect to the fixed
coordinate axis.
Arba Minch University WTI Leacture Notes Prepared Otoma 84
Hydraulics I and Hydraulics II Notes
Fig. Stream tube
Newton’s second law
F=m*a
dv
F=m
dt
F * dt = m * dv
Momentum principle expresses that the rate of change of momentum is equal to
the net force acting on the fluid mass.
Momentum of fluid entering section 1 –1 in a time t in the x –direction
= * dQ * t * V1(x)
Momentum leaving section 2- 2 in time t
= * dQ * t * V2 (x)
From momentum principle
dFx =
P dQ t [v2 ( x) v1 ( x)]
t
dFx = dQ [V2 (x) – V1 (x)]
dFx = net force exerted on the fluid in the x –direction.
The total force in the x –direction is given by
Fx
dFx
A
A
A
dQ v2 ( x) dQ v1 ( x)
A
(v2 dA2 ) v2 ( x) (v1dA1 ) v1 ( x)
A
Assuming the fluid is incompressible
Fx = V2 A2 (V2 (x) - PV1A1 V1 (x)
Fx = Q [V2(x) – V1(x)]
Similar equations for y and z directions may be written
Fy = Q [V2(y) – V1(y)]
Arba Minch University WTI Leacture Notes Prepared Otoma 85
Hydraulics I and Hydraulics II Notes
Fz = Q [V2(z) – V1(z)]
Applications of momentum equations
1) The force caused by a jet striking a surface
A. Impact on a flat surface
i) Stationary plate:
A = area of jet
v1 = velocity of jet
= mass density
Applications of momentum equations
1) The force caused by a jet striking a surface
A. Impact on a flat surface
i) Stationary plate:
A = area of jet
v1 = velocity of jet
= mass density
Fig. A jet hitting a vertical
plate
Fx = Q(v2 (x) – v1(x)) =
Q (0 – v1) momentum
normal to the plate is
destroyed.
Arba Minch University WTI Leacture Notes Prepared Otoma 86
Hydraulics I and Hydraulics II Notes
Fx = - AV2 (force in the jet)
Force exerted on plate = AV2 (Equal and opposite to the force exerted on the jet = Fx)
ii) Moving plate
Initial velocity of jet v1x = V1
Final velocity of jet = velocity of = v2x = U = velocity of plate
Fig. A jet hitting a moving vertical plate
The velocity with which jet strikes the plate = V – U
Mass of fluid striking plate/sec = A (V – U)
Force on plate = A (V – U) (V – U)
= A (V – U) 2
iii) Stationary inclined plate
Fig. A jet hitting an inclined plate
Initial velocity of jet v1(x) = Vsin
Arba Minch University WTI Leacture Notes Prepared Otoma 87
Hydraulics I and Hydraulics II Notes
Final velocity of jet v2(x) = 0
Mass striking stationary plate = AV
Normal force on the plate = AV(Vsin) = AV2 sin
Since the plate surface is smooth, there can be no force exerted by the plate on the fluid jet in the
tangential direction.
Ft = Q1V - Q2 V – PQVcos = 0
Q1 – Q2 – Qcos = 0 (*)
Continuity equation
Q = Q1 + Q2 Q2 = Q – Q1
Substitute in (*)
Q1 = Q - Q2
Q1 – Q + Q1 – Qcos = 0
2Q1 - Q (1+ cos) = 0
Q1 = Q/2 (1 + cos)
Q2 = Q/2 (1- cos)
Q – Q2 – Q2 – Qcos = 0
Q (1 - cos) – 2 Q2 = 0
For a vertical plate, = 90o
Q1 = Q/2 = Q2
iv) Moving inclined plate
Fig. A jet hitting a moving inclined plate
Initial velocity of jet V1(x) = Vsin
Final velocity of jet V2(x) = Usin
Mass striking the moving plate per second = Q = A (V- U)
Normal force on the plate = A (V - U) (V sin - U sin)
= A (V – U) 2 sin
Work done by this force = Fx * U = F n sin * u
Arba Minch University WTI Leacture Notes Prepared Otoma 88
Hydraulics I and Hydraulics II Notes
V) Series of flat plates
The force exerted by the impact of jet can be fruitfully utilized if the flat plates are mounted on
the periphery of a wheel as shown below. The force exerted by the jet causes the rotation of the
wheel. The flat plates thus occupy the bottom most position according to their turn.
Fig. Flat plates mounted a wheel
The number and location of the plates is so arranged that no portion of jet goes waste without
doing work on the plate.
Initial velocity of jet = V
Final velocity = velocity of plate = U
Fluid mass striking the plate per second = Q = AV
Force exerted on the plate by jet = AV(V – U)
Work done per second
= Force * distance moved per second
= AV (V –U) *U
KE of jet per second = ½ (AV)V2
Efficiency of jet =
Work done on plate
AV (v u )u
2(v u )u
1
KE of jet
v2
AV V 2
2
B. Force on curved vane
Consider a symmetrical curved vane having smooth surface. The jet strikes at the center and after
impact it is deflected equally along the vane surface.
Arba Minch University WTI Leacture Notes Prepared Otoma 89
Hydraulics I and Hydraulics II Notes
Fig. A jet hitting a curved vane
= AV * V = AV2
Av
Av
V cos
v cos
Mout = -
2
2
= - AV2cos
Min
Force exerted by curved vane on the jet
Fx = Mout – Min
= - AV2cos - AV2 = - AV2 (1+cos)
Force on curve vane by jet = AV2(1+cos)
For = 900 – Flat plate at right angle to jet F = AV2
For = 00 - semi–circular plate F = 2AV2
Curved vane moving in translation
Mass of fluid striking the vane = A(V- U)
Min = A(V - U) 2
Mout = - A(V – U) 2cos
Force exerted by jet on the vane = Fx = A (V – U) 2 (1+ cos)
Work done by jet = FxU
KE of jet /sec = ½ (AV)V2
Efficiency,
workdone by jet
KE of jet
Arba Minch University WTI Leacture Notes Prepared Otoma 90
Hydraulics I and Hydraulics II Notes
2 (1 cos ) V U U
V3
2
Curved vane mounted on a wheel
Let the wheel rotate with a tangential velocity U and a jet moving with velocity v strikes the
wheel.
Fluid mass striking the wheel per second = PAV
Min = AV (v –u) (Before impact)
Mout = AV (v –u) cos (After impact)
Force exerted by jet on the van = Min – Mout
F = AV (v – u) (1+ cos)
W=F*U
KE = ½ AV2
2u (v u ) (1 cos )
v2
2. Force exerted on a reducing pipe bend
i. Bend in a horizontal plane.
Y
X
θ
Fig. Force on a horizontal reducing bend
Let Fx and Fy be the components of the force exerted on the fluid by the pipe bend.
Then momentum equation in the x–direction can be written as:
P1A1 - P2A2cos - Fx = Q(V2cos - V1)
Fx = Q (V1 -V2cos) - P1A1 + P2A2cos
Momentum equation in the y–direction can be written as:
Fy - P2 A2sin = pQ (V2sin - V1)
(V1 = 0)
Arba Minch University WTI Leacture Notes Prepared Otoma 91
Hydraulics I and Hydraulics II Notes
Fy = P2A2sin + pQ(V2sin)
ii. Bend in a vertical plane.
A reducing bend with deviation in the vertical plane is shown in Fig. below. Due to the
hydrostatic and dynamic pressures a force is exerted by the fluid on the bend which has to be
resisted by a thrust block or other suitable means. This force could be evaluated by plotting the
stream lines and thus determining the pressure distribution. However, by a simple application of
the momentum equation, and quite independently of any energy losses associated with turbulent
eddying (real fluid), we obtain.
Z
Y
θ
Fig. Force on a vertical reducing bend
For the x direction:
P1 A1 - P2A2cos - Fx = pQ(v2cos - v1)
And for the z direction
Fz - W – P2A2 sin = pQv2 sin
Where W is the weight of fluid between the reference sections.
From these equations, Fx and Fz may be determined and hence the resultant force, R:
R
Rz Rz
2
2
It is to be noted that the momentum equation gives no information concerning the location of the
resultant, which necessitates an analysis involving forces and moments.
3. Force in nozzle
A nozzle, attached to a pipeline, and discharging to the atmosphere provides a good example of a
rapid change in velocity. The fluid exerts a force on the nozzle and in accordance with Newton's
third law there is a similar force, of opposite sign, exerted by the nozzle on the fluid. This is the
force which the tension bolts must be designated to withstand. The force could be evaluated by
an analysis of the pressures acting on the surface of the nozzle but this procedure would, to say
the least, be extremely tedious. By contrast, a simple application of the momentum equation
between upstream and downstream reference sections will yield a direct solution. In Fig below,
the component forces are the hydrostatic forces P1A1 and P2A2 and the force Fx exerted by the
Arba Minch University WTI Leacture Notes Prepared Otoma 92
Hydraulics I and Hydraulics II Notes
nozzle on the fluid. The rate of change of momentum is Q(V2 - V1) so that the momentum
equation may be expressed as:
Fx = P1A1 - Q(V2 - V1)
PART II
HYDRAULICS II
CHAPTER ONE
INTRODUCTION TO OPEN CHANNEL FLOW
Description
An open channel is one in which the stream is not completely enclosed by solid boundary and
therefore has a free surface subjected to atmospheric pressure only. The flow in such a channel is
not caused by some external head, but rather only by the gravity component along the slope of
the channel. Thus open channel flow is often referred to as free-surface flow or gravity flow.
The principal types of open channel are natural streams and rivers; artificial canals; and sewers,
tunnels, and pipelines flowing not completely full.
The primary differences b/n the confined flow in pipes & open channel flow is that the pipe flow
is closed channel, which is the top surface is covered by solid boundary, it is not exposed to
atmospheric pressure but open channel flow is exposed to atmospheric pressure. In open
channels the cross-sectional area of the flow is variable that depends on many parameters of the
flow. For this reason, hydraulic computations related to open channel flow are more complicated.
Arba Minch University WTI Leacture Notes Prepared Otoma 93
Hydraulics I and Hydraulics II Notes
Hf
Figure-1.1 Comparison between pipe flow and open channel flow
Where
HGL - Hydraulic grade line (coincide with water surface)
EGL - Energy grade line
Hf - head loss due to friction
V2/2g - velocity head
Despite the similarity between these two flows, it is much more difficult and complex to solve
problems of the open channel case. This is due to the fact that the flow condition in open channel
flow varies as per time and place. When we say the flow condition, it includes depth of flow,
cross-sectional area and slope of the channel. In turn, the depth of flow, discharge and slope of
the channel and water surface are related to each other.
In addition, the bed roughness varies greatly leading the selection of friction coefficient to
uncertainty. The cause of flow in open channel the gravitational forces and viscous shear forces
along the channel wetted perimeter resists flow.
Types of channels
Natural channels: These channels naturally exist without the influence of human beings.
E.g. Rivers, streams, tidal estuaries, aqueducts etc.
Aqueducts are underground conduits that carry water with free surface.
Artificial channels: Such channels are formed by man’s activity for various purposes.
E.g. irrigation channel, navigation channel, sewerage channel, culverts, power canal etc.
The above two channels can have either of the following features:
Prismatic channel: - channels with constant shape and slope.
Non-prismatic channels: - channels with varying shape and slope.
Arba Minch University WTI Leacture Notes Prepared Otoma 94
Hydraulics I and Hydraulics II Notes
Generally, the natural channels fall into the non-prismatic group. That is why intensive study
of the behavior of flow in natural channels requires other fields of studies like, sediment
transport, geomorphology, hydrology, river engineering.
1.2 Types of Flow in Open Channel
According to the characteristics of the flow with respect to time and space, the following
categories can be set.
A. Steady flow: - Here the criterion is time. A flow is steady if the fluid characteristics like
velocity, pressure density, depth of flow doesn’t change or if they can be assumed constant
between the times of consideration.
y
V
p
0
0 ,
0 and
t
t
t
B. Unsteady flow: - Here the fluid characteristics vary with time such that
V
0
t
p
y
0
0
, t
and t
C. Uniform flow: - Here the criterion is space. Open channel flow is said to be uniform if the
depth of flow, velocity remains constant or the same at every section of the channel. Uniform
flow may be steady or unsteady, depending on whether or not the depth changes with time.
V
0
s
y
0
, and s
D. Non- uniform flow: - In case when the velocity, depth of flow in a channel changes with
space:
V
0
s
y
0
, and s
E. Steady uniform flow: - The depth of flow does not change during time interval and space
under consideration.
F. Unsteady uniform flow: - This is a rare phenomenon when the depth of flow fluctuates
while remaining parallel to the channel bottom.
G. Unsteady uniform flow: - This is a flow in which the depth is varying time but not with
space.
H. Unsteady non- uniform flow: - Is the flow in which the depth is varying with space and
time.
Geometric elements of open channel section
Geometric elements are properties of a channel section that can be defined entirely by the geometry
of the section and the depth of flow. The most used geometric properties include:
Arba Minch University WTI Leacture Notes Prepared Otoma 95
Hydraulics I and Hydraulics II Notes
1. Depth of flow(y): It is the vertical distance from the lowest point of the channel to the free
surface.
2. Top width (T): It is the width of channel section at free surface.
3. Stage (h): is the elevation or vertical distance of the free surface above a datum.
4. Wetted perimeter (p): It is the length of the channel boundary that is in contact with water.
5. Wetted area (A): is the cross-sectional area of the flow normal to the direction of flow.
6. Hydraulic radius (R): it is the ratio of wetted area to its wetted perimeter
A
R=
P
7. Hydraulic depth (hydraulic mean depth) (D): the ratio of wetted area to the top width,
A
D=
T
1.3 Uniform Flow
Uniform flow (steady uniform flow) occurs when the cross-section of flow and velocity of flow
remain constant along a channel. This is so when there exists an exact balance between the
gravity and resistance forces as in very long prismatic channels.
Thus, referring to the figure below, y1 = y2 and v1 = v2 and the channel bed, water surface and
energy line are all parallel to one another i.e. Sw = So = S =
Z
tan
X
X
S
Hf (Z)
Sw
Y0
Wsinө
S0
0
W
L
Fig. 1.2 Uniform flow in open channel
Where S0- bed slope of channel
Sw- Water surface slope
S- Slope of EGL
Arba Minch University WTI Leacture Notes Prepared Otoma 96
Hydraulics I and Hydraulics II Notes
W – Weight of water
0 – Shear force
L- Length of channel
Uniform flow is the result of exact balance between the gravity and friction force
Wsin = o .P.L……………………………. (1)
A L sin = o .P.L
But sin = hf/L = S, solving for o ,
o =
A
.S R.S ………………………………… (2)
P
Where - unit weight of the water
The shear stress is assumed proportional to the square of the mean velocity,
or o= kV2…………………………………..……..(3)
Therefore, kv2 = RS
V2 =
Let
k
RS ,
k
C 2 -constant (b/c &k- are constant)
V C RS. ……………………………………………….... (4)
This is the Chezy –formula
C = Chezy coefficient (Chezy’s resistance factor)
V = Average velocity of flow
Manning Formula
One of the best as well as well as one of the most widely used formula uniform flow in open
channels is that published by the Irish engineer Robert Manning. In SI units the Manning
formula is
1 2 1
V= R 3 S 0 2 ……………………………………………… (5)
n
n- is the roughness coefficient.
A relation between the Chezy’s C and Manning’s n may be obtained by comparing eqn (4) & (5)
Arba Minch University WTI Leacture Notes Prepared Otoma 97
Hydraulics I and Hydraulics II Notes
1
R6
………………………………………….. (6)
C
n
The value of n ranges from 0.009 (for smooth straight surfaces) to 0.22 (for very
dense flood plain forests).
1.2 Most Efficient Cross-Section
The uniform flow formulas given above show that for a given slope and roughness, the velocity
increases with the hydraulic radius. Therefore, for a given area of water cross-section, the rate of
discharge will be a maximum when R is a maximum, which is to say, when the wetted perimeter
and so the frictional resistance is a minimum. Such a section is called the most efficient crosssection.
The velocity in an open channel is:
V = f (R, S) ……………………………………. (a)
Q = A*V = A*f (R, S) ……………………………...(b)
Equation (b) indicates that for the given area of cross section and slope the discharge Q will be
maximum when R is maximum.
Since, R = A/P, R will be maximum when P is minimum for a given area.
We can conclude that for most efficient and economical channel section the wetted perimeter
should be minimum & also frictional resistance, o is minimum.
For example, a rectangular channel of depth y and width B
A = BY…………………………. (i)
P = B = 2Y………………………. (ii)
From eqn. (i), B = A/Y
Substituting in (ii) P = A/Y + 2Y…………. (iii)
For maximum Q, P- is minimum.
dp
d
0
( A / Y 2Y ) 0
dY
dY
A 20
Y
A 2Y 2 B * Y
So, B = 2Y (or Y = B/2)
Arba Minch University WTI Leacture Notes Prepared Otoma 98
Hydraulics I and Hydraulics II Notes
Thus, the rectangular channel is most efficient and economical when the depth of water is onehalf of the width of the channel and the discharge will be maximum.
Accordingly, the most efficient channel shape is the semi-circle. The usual shape for new
channel & canal is the rectangular or trapezoidal such that the inscribed semi-circle is tangential
to the bed & sides.
1.3 Specific Energy
For any cross section, shape, the specific energy (E) at a particular section is defined as the
energy head to the channel bed as datum. Thus,
E Y
V2
……………………………………………. (1)
2g
( - is kinetic energy correction factor 1)
For a rectangular channel, the value of flow per unit width is Q/B = q, and average velocity
V Q
A
qB q
BY Y
Therefore, eqn (1) becomes:
q
E y
2
y
2
y q …………………………………… (2)
2g
2 gy 2
( E y )Y 2
q2
(For the case of constant q) ………………………… (3)
2g
A plot of E vs y is a hyperbola like with asymptotes (E-y) = 0 i.e. E = y and y = 0. Such a curve
is known as specific energy diagram.
Arba Minch University WTI Leacture Notes Prepared Otoma 99
Hydraulics I and Hydraulics II Notes
fig 1.3 Specific energy curve
For a particular q, we see there are two possible values of y for a given value of E. These are
known as Alternative depths (for e.g. y1 & y2 on fig. above)
The two alternative depths represent two totally different flow regimes slow & deep on the upper
limp of the curve (sub critical flow) & fast and shallow on the lower limb of the curve. (super
critical flow)
1.4 Critical Depth
From fig 1.4 above, at point C for a given q the value of E is a minimum and the flow at this
point referred to as critical flow. The depth of flow at that point is the critical depth yc & the
velocity is the critical velocity vc.
For example, a relation for critical depth in a wide rectangular channel can be found by
differentiation E of eqn.2 with respect to y to find the value of y for which E is a minimum.
dE
q2
1 3 …………………………………………….. (4)
dY
gy
And when E is a minimum y = yc and dE
dy
0 , so that
Arba Minch University WTI Leacture Notes Prepared Otoma 100
Hydraulics I and Hydraulics II Notes
q2
0 1
gYc
q 2 gy c ………………………………. (5)
3
3
Substituting q = vy = vc*yc, gives
Vc gyc
2
Vc
gy c
q
……………………………………….. (6)
yc
It may be expressed as:
q2
yc
g
g
Vc 2
1
3
…………………….……………….. (7)
2
From eqn (7)
Vc
y
c , hence,
2g
2
E c E min y c
Vc
2
2g
y c 1 y c 3 y c ………… (8)
2
2
And yc 2 Emin ……………………………………………….. (9)
3
From eqn. (7): q max
3
gyc ……………………………………………. (10)
For non-rectangular cross-section the specific energy equation,
E y
Q2
………………………………………….. (11)
2gA 2
[V=Q/A]
To find the critical depth,
dE
Q 2 dA
1 3
……………………………………….. (12)
dy
gA dy
From fig 1.3 (b) dA = dy*T (at Yc, T = Tc)
Therefore, the above equation becomes:
2
Qmax Tc
gAc
3
1 …………………………………………….. (13)
The critical depth must satisfy this equation
3
From eqn. (13) Q 2
gAc
and substitute in eqn. (11) then
Tc
Arba Minch University WTI Leacture Notes Prepared Otoma 101
Hydraulics I and Hydraulics II Notes
Ec y c
Ac
…………………………………………..(14)
2Tc
eqn.(13) can be solved by trial & error for irregular section by plotting f ( y )
Q 2T
and
gA 3
critical depth occurs for the value of y which makes f(y) =1
Sub critical, Critical and super critical flow
If specific energy curve for Q- constant is redraw alongside a second curve of depth against
discharge for constant E, will show the variation of discharge with depth.
a) For a given constant discharge fig (1.4a)
i)
the specific energy curve has a minimum value Ec at point C with a corresponding
depth yc known as critical depth.
ii)
For any other value of E there are two possible depth of flow known as alternative
depth one of which is termed sub critical (y > yc) and the other supercritical (y < yc).
b) For a given constant specific energy (fig.1.5(b))
i)
the depth discharge curve shows that discharge is a maximum at the critical
depth
ii)
For all other discharges there are two possible depth of flow ( sub- & super
critical) for any particular value of E,
From eqn. (13) above if we substitute
Q= AV (continuity equation), we get
Q 2T
1
gA 3
A 2V 2T
V 2T
1
1
gA
gA 3
but A/T = D (Hydraulic depth), then [ D = Y for rectangular section)
V2
1 V gy ……………………………(*)
gy
V
1 Froude number at critical state.
gy
Arba Minch University WTI Leacture Notes Prepared Otoma 102
Hydraulics I and Hydraulics II Notes
F
V
gy
Thus,
……………………………………….(**)
i) F = 1 critical flow
ii) F< 1 sub critical flow
iii) F>1 Super critical
1.5 Hydraulic Jump
By far the most important of the local non-uniform flow phenomena is that which occurs when
supercritical flow has its velocity reduced to sub critical. There is sudden rise in water level at
the point where hydraulic jump occurs (Rapidly varied flow). This is an excellent example of the
jump serving a useful purpose, for it dissipates much of the destructive energy of the high –
velocity water, thereby reducing downstream erosion. The turbulence with in hydraulic jumps
has also been found to be very useful & effective for mixing fluids, & jumps have been used for
this purpose in water treatment plant & sewage treatment plants.
V1
V2
Y2
Y1
Lj
Fig 1.5 hydraulic jump on horizontal bed following over a spillway
Analysis of hydraulic jump
Assumptions
1) The length of the hydraulic jump is small, consequently, the loss of head due to friction is
negligible,
2) The channel is horizontal as it has a very small longitudinal slope. The weight
component in the direction of flow is negligible.
Arba Minch University WTI Leacture Notes Prepared Otoma 103
Hydraulics I and Hydraulics II Notes
3) The portion of channel in which the hydraulic jump occurs is taken as a control volume &
it is assumed the just before & after the control volume, the flow is uniform & pressure
distribution is hydrostatic.
Let us consider a small reach of a channel in which the hydraulic jump occurs.
The momentum of water passing through section (1) per unit time is given as:
p1 rQV1
QV1 ……………………………………….(i)
t
g
Momentum at section (2) per unit time is:
p2
rQV2
t
g
QV2 ………………………………………….(ii)
Rate of change of momentum b/n section 1 & 2
P
Q (V2 V1 ) ……………………………………….(iii)
t
The net force in the direction of flow = F1-F2 ………………..(iv)
F1 A1Y1 ,
F2 A2 Y2
Y 1 & Y 2 are the center of pressure at section (1) & (2)
Therefore F1-F2 = M = Q (V2 - V1)
A1Y 1 A2 Y 2
Q
g
(V2 V1 ) ……………………………………(v)
From continuity eqn. Q = A*V,
V = Q/A, so
Q
A1Y 1 A2 Y 2
g A2 A1
2
Q 1
A1Y 1 A2 Y2
A 1 A .................................................(iv)
2
1
g
Q Q
Rearranging this eqn.:
Q2
Q2
A1Y 1
A2 Y 2
gA1
gA2
= Constant. …………… (vii)
M1
M2
Arba Minch University WTI Leacture Notes Prepared Otoma 104
Hydraulics I and Hydraulics II Notes
M1and M2 are the specific forces at section (1) & (2) indicates that these forces are equal
before & after the jump.
Y1 = initial depth
Y2 = sequent depth
Hydraulic jump in a rectangular channel
A1 = By1
the section has uniform width (B)
A2 = By2
Y 1
Y1
Y
,Y 2 2
2
2
Now from eqn. (Vii) above:
Q2
Q
y
By1 1
By2 * y2
2
gBy1
2 gBy2
Q2
By 2
Q2
By 2
1
2 ..............................................................(viii)
gBy1
2
Bgy2
2
Flow per unit width of q = Q/B
Q = qB, then eqn. (viii) becomes
q 2 B 2 By12 q 2 B 2 By22
Bgy1
2
Bgy2
2
q 2 1 1 y22 y12
………………………………… (.ix)
g y1 y2
2
y22 y12
2q 2
y1 y2
y2 y1
g
2q 2
y1 y2 ( y1 y2 )...................................................................(x)
g
y2 y12 y1 y22
2q 2
0...........................................................(xi )
g
This is quadratic eqn. & the solution is given as
Arba Minch University WTI Leacture Notes Prepared Otoma 105
Hydraulics I and Hydraulics II Notes
2
y2
y 2q
y1
2
...................................................( xii )(a)
2
gy2
2
2
y2
2
y1
2q 2
y1
................................................(b)
2
2
gy2
y1 y2
2
(1 1
8q 2
)...................................................(c)
gy23
8q 2
y2 y1 (1 1 3 .....................................................(xii )(d )
2
gy1
The ratio of conjugate depths;
y1
2
8q
1 (1 1 3 ...............................................(xii )(e)
y2
2
gy
2
y2
2
8q
1 (1 1 3 ..................................................( f )
y1
2
gy
1
q
V1
V2
y2
F1
, F2
gy1
gy2 gy2
Therefore
q
gy23
y1 1
(1 1 8 F22 )........................(g )
2
y2
y2 1
(1 1 8 F12 ..........................................(h)
2
y1
Energy dissipation in a Hydraulic Jump
The head loss hlf caused by the jump is the drop in energy from section (1) to (2) or:
hlf = E = E1 - E2
V2
V2
y1 1 y2 2 .......................................(1)a
2g
2g
q2
q2
....................................(b)
y1
y2
2
2
2
gy
2
gy
1
2
q 2 y22 y12
( y2 y1 ).......................(c)
2 g y12 y22
Arba Minch University WTI Leacture Notes Prepared Otoma 106
Hydraulics I and Hydraulics II Notes
From eqn. (x) substituting:
hlf
2q 2
y1 y2 ( y1 y2 ) in to this eqn. & by rearranging:
g
3
y2 y1
E
..............................................(2)
4 y1 y2
Therefore power lost = Q hlf (kw)…………………(3)
Uses of hydraulic jump or purpose of hydraulic jump
i)
To increase the water level on the d/s of the hydraulic structures
ii)
To reduce the net up lift force by increasing the downward force due to the increased
depth of water,
iii)
To increase the discharge from a sluice gate by increasing the effective head causing
flow,
iv)
For aeration of drinking water
v)
For removing air pockets in a pipe line
vi)
To dissipate energy d/s of hydraulic structures
vii)
For mixing of chemicals in water treatment or purification
Types of Hydraulic jump
Hydraulic jumps are classified according to the upstream Froude number and depth ratio.
F1
Y2/y1
Classification
<1
1
Jump impossible
1-1.7
1-2
Undular jump (standing wave)
1.7-2.5
2-3.1
Weak jump
2.5-4.5
3.1-5.9
Oscillating jump
4.5-9.0
5.9-12
Steady jump (45-70% energy loss)
>9.0
>12
Strong or chopping jump (=85% energy loss)
Arba Minch University WTI Leacture Notes Prepared Otoma 107
Hydraulics I and Hydraulics II Notes
CHAPTER TWO
DIMENSIONAL ANALYSIS, SIMILITUDE & HYDRAULIC MODELS
2.1. INTRODUCTION
Hydraulics is an experimental science and a complex subject. Most phenomena involving the
movement of water are known to be dependent on many variables- geometric characteristics,
fluid properties and flow characteristics. Much of raw experimental data were incomplete,
ambiguous, & incorrectly taken.
It is usually impossible to determine all the essential facts for a given fluid flow by pure theory,
& hence, dependence must often be placed up on experimental investigations.
The number of tests to be made can be greatly reduced by the systematic use of Dimensional
Analysis and the laws of similitude or similarity. Dimensional Analysis is a mathematical
technique, which makes use of the study of dimension as an aid to the solution of several
engineering problems
Dimension less grouping reduces the number of variables that have to be processed.
Dimension analysis can be used to obtain functional relationship among the variables in terms of
non- dimensional parameter. It helps in obtaining a systematic form of the variables involved in
the problem. However, dimensional analysis doesn’t give complete relationship; it gives only a
general relationship.
Some of the uses of dimensional analysis are narrated as follows: i.
Testing the dimensional homogeneity of any equation of fluid motion
ii.
Deriving equations expressed in terms of non- dimensional parameters to show the
significance of each parameter.
iii.
Planning model tests & presenting experimental results in a systematic manner in
terms of non- dimensional parameters; thus making it possible to analyses the
complex fluid flow phenomena
Hydraulic structures or machines can be designed using:
(i) Pure theory,
(ii) Empirical methods,
(iii) Semi-empirical methods which are mathematical formulations based on theoretical
concepts supported by suitably designed experiments,
(iv) Physical models,
(v) Mathematical models
i) The purely theoretical approach in hydraulic engineering is limited to a few cases of laminar
flow, for example the Hagen Poisseuille equation for the hydraulic gradient in the laminar flow
of an incompressible fluid in a circular pipeline.
ii) Empirical methods are based on correlations between observed variables affecting a
particular physical system. Such relationships should only be used under similar circumstances
to those under which the data were collected. Due to the inability to express the physical
interaction of the parameters involved in mathematical terms some such methods are still in use.
One well-known example is in the relationship between wave heights, wind speed and duration
for the forecasting of ocean wave characteristics.
iii) A good example of a semi-empirical relationship is the Colebrook white equation for the
friction factors in turbulent flow in pipes (We will see it in chapter 4). This was obtained from
Arba Minch University WTI Leacture Notes Prepared Otoma 108
Hydraulics I and Hydraulics II Notes
theoretical concepts and experiments designed on the basis of dimensional analysis; it is
universally applicable to all Newtonian fluids.
iv) Dimensional analysis also forms the basis for the design and operation of physical scale
models, which are used to predict the behavior of their full –sized counterparts called
‘prototypes’. Such models, which are generally geometrically similar to the prototype, are used
in the design of aircraft, ships, submarines, pumps, turbines, harbors, breakwaters, river and
estuary engineering works, spillways, etc.
v) The mathematical modeling techniques have progressed rapidly due to the advance of highspeed digital computers, enabling the equations of motion coupled with semi-empirical
relationships to be solved for complex flow situations such as pipe network analysis, pressure
transients in pipelines, unsteady flows in rivers and estuaries, etc. There are many cases,
particularly where localized flow patterns cannot be mathematically modeled, when physical
models are still needed.
Without the technique of dimensional analysis experimental and computational progress in fluid
mechanics would have been considerably retarded.
2.1 DIMENSIONAL ANALYSIS
Dimensional analysis is a method, which describes a natural phenomenon by dimensionally
correct equation among certain variables, which affect the phenomenon. It is a mathematical
method, which is of considerable value in problems that occur in fluid mechanics.
In dimensional analysis, from a general understanding of fluid phenomenon, one first predicts
the physical parameters that will influence the flow, and then by grouping these parameters in
dimension combinations, a better understanding of the flow phenomena is made possible.
Application of dimensional analysis:
Developing equations –reducing number of variables in an experiment
Producing dimensionless parameters – establish the principle of model design.
FUNDAMENTAL DIMENSIONS
In an equation expressing physical relationship between quantities, absolute numerical and
dimension equality must exist. The magnitude of such quantities as mass, length, force,
acceleration etc. are expressed differently in different units of measurement.
The mass, length, and time are independent of each other and their units of measurement are
prescribed by international standards and called fundamental quantities. The units of all other quantities
may be determined either from their definitions or from the physical laws describing them.
In place of mass, the force is also sometimes considered as fundamental quantity. The force and the mass
are related by the Newton's second law as follows
F = m. a
F=m*a = (M) (LT-2)
Arba Minch University WTI Leacture Notes Prepared Otoma 109
Hydraulics I and Hydraulics II Notes
DIMENSIONS OF PHYSICAL QUANTITIES USED IN FLUID MECHANICS
Number
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Quantity
Length
Time
Mass
Force
Velocity
Acceleration
Area
Discharge
Pressure
Power
Density
Unit gravity force
Dynamic viscosity
Kinematic viscosity
Surface Tension
Bulk modulus of elasticity
Shear stress
Symbol
L
T
m
F
V
a
A
Q
P
P
γ
K
ﺥ
Dimensions (MLT)
L
T
M
M L T -2
L T -1
L T -2
L2
L3 T -1
M L-1 T-2
ML2T-3
M L-3
ML-2 T -2
M L-1T-1
L2 T-1
MT-2
ML-1 T-2
ML-1T-2
Dimensional Homogeneity
Any equation describing a physical situation will only be true if both sides have the same
dimensions. That is, it must be dimensionally homogenous. For example, the equation which
gives for over a rectangular weir (derived earlier in this module) is,
The SI units of the left hand side are m3s-1. The units of the right hand side must be the same.
Writing the equation with only the SI units’ gives
i.e. the units are consistent. To be stricter, it is the dimensions which
must be consistent (any set of units can be used and simply converted using a constant). Writing
the equation again in terms of dimensions,
Notice how the powers of the individual dimensions are equal, (for L
they are both 3, for T both -1). This property of dimensional homogeneity can be useful for:
1. Checking units of equations;
2. Converting between two sets of units;
3. Defining dimensionless relationships (see below). k
Arba Minch University WTI Leacture Notes Prepared Otoma 110
Hydraulics I and Hydraulics II Notes
METHODS OF DIMENSIONAL ANALYSIS
The dimensional analysis is a power full tool in formulating problems of physical phenomenon.
It must be solved experimentally. The dimensional analysis accomplishes this by formation of
dimension-less groups containing relevant variables. There are several approaches for the
dimensional analysis. However, all the methods are absolutely dependent on the correct
identification of all the factors, which govern the physical event being analyzed.
The application of dimensional analysis to any practical problem is based on the assumption that
certain variable, which affect the phenomenon are independent variables, and all variables other
than these and the dependent variable, are irrelevant and have no bearing on the phenomenon.
Steps in dimensional analysis
☺ To decide which variables enter the problem
☺ Formation of dimensionless groups of the variables
☺ Requires thorough understanding
☺ Judgment and experience
1. RAYLEIGH'S METHOD
It gives a special form of relationship among the dimensionless group, and has an inherent draw
back that it doesn't provide any information regarding the number of dimensionless groups to be
obtained as a result of dimensional analysis.
Procedure:
i. The functional r/s can be written as:
Y= f (X1, X2, X3, …, Xn)
ii.
iii.
iv.
v.
Any function can be expressed as a series of terms –each being made up of product of variables
brought to exponent.
Y = K [X1a, X2b, X3c…Xnz]
The exponents a, b, c… can be determined by dimensional homogeneity.
Since there are three fundamental dimensions, only three simultaneous equations can be formed.
The non-dimensional parameters are obtained by grouping variables with like exponent.
Example
A scale model test has been carried out on a new hydraulic machine, the experiment team has been
presented the following data:
Thrust force, F
M1L1 T -2
The flow velocity, V
L1 T -1
Viscosity,
M L-1 T -1
Density,
ML-3
Size of system, L
L are given
Produce meaning full dimensionless ratios
Solution:
The dimension less ratio should work equally for both model and prototype
i.
F = ƒ (v, , , L,)
ii.
F = K (VX µY Z L w )
K is a dimension less constant
iii.
(M1 L1 T -2) = [(LT-1) X (M1 L-1 T-1) Y (M L-3) Z (L) W]
Using the principles of dimensional homogeneity
Arba Minch University WTI Leacture Notes Prepared Otoma 111
Hydraulics I and Hydraulics II Notes
x 2 y,
z 1 y,
w 2 y
There fore, F = K (V2-y, µy, 1-y,L2-y)
y
VL
= V 2 L2
iv.
F = V L C
VL
VL
F
= Φ (Re)
v.
2 2
V L
F
On the basis of dimensional analysis
is dependent only on the Reynolds number.
V 2 L2
2
2
2. BUCKINGHAM -π THEOREM
The Buckingham - pi method is widely used in the dimensional analysis of a problem and
expresses the resulting equation in terms of dimensionless groups ( terms).
☺ It arranges variables in dimensionless groups.
☺ It reduces the number of variable.
Rules:
(a) If a phenomenon involves n variables and these variables are described by m fundamental
dimensions, they will produce n - m groups
f1 (1, 2, 3... n-m) = constant;
(b) Each - group should be a function of maximum of m+1 variable
(c) m repeating variables are selected from amongst the n - variables so that in combination
contain m fundamental dimensions
Selection of repeating variables
Repeating variables are those, which will appear in all or most of the
groups, and have an
influence in the problem. Before commencing the analysis of a problem, one must choose the
repeating variables. There is considerable freedom allowed in the choice.
Some rules which should be followed are:
1. From the 2nd theorem there can be m (= 3) repeating variables.
2. When combined, these repeating variables must contain all of the dimensions (M, L, T)
(That is not to say that each must contain M, L and T).
3. A combination of the repeating variables must not form a dimensionless group.
4. The repeating variables do not have to appear in all groups.
5. The repeating variables should be chosen to be measurable in an experimental
investigation. They should be of major interest to the designer. For example, pipe
diameter (dimension L) is more useful and measurable than roughness height (also
dimension L).
Arba Minch University WTI Leacture Notes Prepared Otoma 112
Hydraulics I and Hydraulics II Notes
In fluids it is usually possible to take , and d as the three repeating variables.
That is describing geometry of flow, flow characteristics, and fluid property.
(d) The governing quantities must not combine among themselves to form dimensionless groups.
And each -term is dimensionless; the final function must be dimensionless, and therefore
dimensionally homogeneous.
f
1
, 2 , 3 , , n
m
M 0 L 0 T 0
From the above example F, v,,, L
n = 5, m= 3 so n-m=2 groups (2 π-groups)
The repeating variables are , L and v.
L x1 M y1
z1 ML
0 0 0
x1 y1 z1
1 = V L F M L T , 3 , L , 2
T L
T
L x2 M y2
z2 M
0 0 0
x2 y2 z2
2 = V L M L T , 3 , L
T L
LT
After equating both equations:
F
1 =
V 2 L2
VL
F
2 2 ,
0
V L VL
2 =
or
OR
VL
F
2 2
V L
VL
F= V 2 L2
Example1)
Using the variables, Q, D, ΔH/L, ρ, μ, g as pertinent to smooth pipe flow, arrange them in
to dimension less parameters by the Buckingham’s π theorem.
Solution:
- The pertinent variables are
Q, D, ΔH/L, ρ, μ, and g
- Functional relation
ƒ (Q, D, ΔH/L, ρ, μ, g)
- Select the repeating variables
D, ρ, Q
- Write the pi – parameters
Arba Minch University WTI Leacture Notes Prepared Otoma 113
Hydraulics I and Hydraulics II Notes
2.3.
SIMILITUDE AND HYDRAULIC MODELS
Hydraulic Models
The design of a major hydraulic system may be approached
☺ By theoretical reasoning and use of numerical models Q = V*A.
☺ On the basis of previous experience of similar system.
☺ By scale model experiments true distorted.
It is known that even with modern computing facilities, many complex problems still challenge
complete theoretical analysis. A combination of past experience, theory and dimensional analysis
will provide partial or complete solution to a number of problems. However, there still remain
many problems, which are tractable only through experimentation. This will be done through
model studies of proposed hydraulic structures and machines.
Models permit visual observation of the flow and make it possible to obtain numerical data.
E.g. Calibrations of weirs and gates, depth of flow, velocity distributions, forces on gates,
efficiencies and capacities of pumps and turbines, pressure distribution and losses.
The main objectives achieved through dimensional analysis and subsequent model testing may
be:
To obtain a relationship amongst variables influencing a problem in terms of dimensionless
parameters. The knowledge of this relationship is essential for planning and conducting the
model tests and thereafter in presenting the test results.
To obtain experimental data from model tests for predicting the performance of its prototype
under different conditions of flow it may be subjected to during its operation.
To check the validity of assumptions made in the design of certain hydraulic structures. The
design of many of hydraulic structure is usually based on certain assumptions, which may not
be fully satisfied. It is always in the best interest, to find out whether the assumptions made
are on the safer side and also to ascertain whether the structures so designed will serve the
desired purpose.
The model may be larger, smaller or even of the same size as the prototype depending on type of
fluid used. The choice of the fluid and the geometrical scale will depend only by the practical
considerations. If complete similarity is to exist between the flow in the prototype and the flow
in its model, every dimensionless parameter referring to the conditions in the models must have
the same numerical value as the corresponding parameters referring to the prototype.
Hydraulic models may be either true or distorted. True models have all significant characteristic
of the prototype reproduced to scale (geometrically similar) and satisfy discharge restrictions
(kinematically and dynamically similar).
The models in which it is not possible to maintain geometric similarity is known as distorted
models
TYPES OF SIMILARITY
For complete similarity to exist between the model and prototype, they must be geometrically,
kinematically and dynamically similar.
GEOMETRIC SIMILARITY
It is the similarity of the shape (scale factor). It is obtained when the solid boundaries that control
the follow of fluid are geometrically similar. The model is a geometric reduction of the prototype
Arba Minch University WTI Leacture Notes Prepared Otoma 114
Hydraulics I and Hydraulics II Notes
and is accomplished by maintaining a fixed ratio of all homologous lengths between the model
and prototype. These physical quantities are length, area, diameter, volume, etc.
HP
Bp
MODEL
LP
PROTOTYPE
Model scale ratio:
Lr =
Lp
Lm
Bp
Bm
Hp
(1)
Hm
Area Ratio:
Ar =
Ap
Am
Lp* * B p
Lm * Bm
L2r
Volume ratio:
Vr =
Lp * Bp * H p
Lm * Bm * H m
=Lr3
KINEMATIC SIMILARITY
It is the similarity of motion. For kinematic similarity to exist, the streamline pattern in the model
must be the same as in its prototype. The ratios of kinematic quantities representing the flow
characteristics such as, time, velocity, acceleration, and discharge must be the same at all
corresponding points.
The velocity ratio is:
Vp
Vr =
Vm
Time scale ratio:
T p Lr
Tr =
{b/c T= L/V}
Tm Vr
Acceleration scale ratio:
Lr Vr2
ar
am Tr2
Lr
Discharge scale ratio:
ap
{b/c a = [L/T2] }
Arba Minch University WTI Leacture Notes Prepared Otoma 115
Hydraulics I and Hydraulics II Notes
L3 p
Qr =
Qp
Qm
Tp
L3m
Tm
L3r
Tr
DYNAMIC SIMILARITY
It is the Similarity of forces involved in motion. Dynamic Similarity is attained if the ratio of
homologous forces in the model and prototype are kept constant.
Fp
i.e.
= Fr
Fm
The conditions required for complete similarity are developed form the Newton 2nd law of
motion F x ma x
The forces acting may be any one or a combination of several of the following: viscous, pressure,
gravity, elasticity, surface tension, inertia forces etc.
Forces (viscous pressure gravity elasticity surface tension)p m p a p
Forces (viscous pressure gravity elasticity surface tension)m
mm am
F Fv Fg Fs Fp Fe RESULTANT Fi
m. a
NOTE: Newton’s Law: Inertia force (Fi) is equal and opposite to the resultant forces.
F
F
p
m
m.a p
m.a m
Fi p
Fi m
(1)
However, in practice, a mode is designed to study the effects of only a few dominant forces.
Dynamic similarity requires that the ratios of these forces be kept the same between the model
and prototype.
v2
Inertia force, Fi = m *a = 3 p 2 v 2
du
v
Viscous force, Fv = حA =
A * 2 . .
dy
Gravity force, Fg = m*g = . 3 g
Pressure force, Fp = p * A = .2
Elastic force, Fe = Ev*A = Ev* 2
Surface tension force, Fs = l
In problems of fluid flow, the inertia force will always exist and hence it is customary to find out
the force ratios with respect to the inertia forces, thus:
Arba Minch University WTI Leacture Notes Prepared Otoma 116
Hydraulics I and Hydraulics II Notes
Inertia- to- viscous forces ratio
Fi
F
i
Fv m Fv p
Inertia-to gravity forces ratio
Fi
Fi
F
g m Fg p
Inertia to elastic forces ratio
Fi
F
i
Fe m Fe p
Inertia- to surface tension forces ratio
Fi
F
i
Fs m Fs p
Inertia -to pressure forces ratio
Fi
Fi
F
p m Fp p
(2)
(3)
(4)
(5
(6)
☺ When the two systems are geometrically, kinematically and dynamically similar, then they
are said to be completely similar or complete similitude exists b/n the two systems.
The above six equations are dimensionless groups. The significance of the dimensionless ratios
is discussed below:
(a) REYNOLDS NUMBER (phenomenon governed by viscous force)
A fluid in motion always involves inertia forces. If the inertial forces and viscous forces
(example pipe flow) can be considered to be the only forces that govern the motion, the ratio of
these forces acting on homologous particles in a model and its prototype is defined by the
Reynolds number.
F
Re = i = (Inertial force)/(Viscous force)
Fv
L2V 2
VL
LV
=
(Non-dimensional ratio)
VL
This is for flow of fluid in pipe. Also for airplane traveling at speed below that at which
compressibility of the air is appreciable. Further, for a submarine submerged far enough
so as not to produce waves on the surfaces.
This states that when the inertial force and the viscous force are considered to be the only forces
governing the motion, the Reynolds number of the model and of the prototype or of two
pipelines of different fluids, must be kept constant. Thus:
Arba Minch University WTI Leacture Notes Prepared Otoma 117
Hydraulics I and Hydraulics II Notes
LV
LV
Re m Re p
NOTE: D is taken as L for pipe flow.
m
p
(b) FROUDE NUMBER: (phenomenon governed by gravity force)
When inertial forces and gravity forces are considered to be the only dominant forces in the fluid
motion, the ratio of inertia forces to gravity forces acting on the homologous elements of the
fluid in the model and prototype are considered as follows:
Fi L2V 2 V 2
3
F
gL
gL
g
V
is known as Froude number.
The square root of this ratio
gL
V
Therefore, Fr =
gL
This is used for the wave action setup by a ship, the flow of water in open channels, the
forces of a stream on a bridge pier, the flow of jet from an orifice, and so on.
In open hydraulic structures
Spill way
Weirs
Channel transitions.
Sluices etc
For dynamically similitude model and prototype:
V
Fr (mod el ) Fr ( proto ) V
gL
gL
m
p
N.B For open channel case L is the depth of the channel.
For a ship, L is taken as the length at water line.
In some flow situations, fluid friction is a factor of gravity as well as Inertia. Hence,
Reynolds number & Froude number must both be satisfied simultaneously. To satisfy
this, we have to use fluids of different viscosity for both model and prototype. Thus:
3
m Lm
p L p
The scale number for Froude number similarity will be:
Vr =
Vp
Vm
Lr (for the same Fr and g).
Tr
Time ratio:
Acceleration ratio:
Discharge ratio:
2
Tp
Lr
Lr
Tm Vr
V
ar r 1
Tr
5
Qr Vr Ar Lr 2
Arba Minch University WTI Leacture Notes Prepared Otoma 118
Hydraulics I and Hydraulics II Notes
(c) WEBER NUMBER (phenomenon governed by surface tension)
The surface tension is a measure of energy level on the surface of a liquid body. The force is of
primary importance in hydraulic engineering practice in the study of small surface waves or
control of evaporation from a large body of water, such as water storage tank / reservoir.
In river and harbor models reduction of scale often leads to appreciable viscous and capillary
effects in the shallow regions of flow. The depth of flow in such cases should be sufficiently
large so that capillary effects are negligible.
The ratio of Inertia to Surface tension forces in prototype and model is:
Fi V 2 L2
V2
Fs
L
L
The square root of this dimensionless ratio is known as WEBER NUMBE (We):
V
We=
L
It is applied at the leading edge of a very thin sheet of liquid flowing over a surface. Like:
Capillary movement of water in solids.
Flow of liquid at a very small depth over a surface.
Flow over weir at very small heads.
Spray of liquid from the exit of discharging tube resulting in the formation of drops of
liquids.
(d) MACH NUMBER (phenomenon governed by elastic forces)
The Mach number can be regarded as the ratio of inertia and elastic forces. In problems where
the compressibility of the fluid becomes important, the elastic force must be considered. The
high-speed motion through air causes compressibility effect (elastic force). The Mach number is
therefore, measures of the effects of compressibility.
Aerodynamic testing.
Flow gases exceeding the velocity of sound.
Water hammer problems. (Design of surge tanks).
The ratio of Inertia forces& elastic forces in prototype and model is:
Fi L2V 2 V 2
E
Fe
EL2
The square root of this dimensionless number is known as
MACH NUMBER (M). Thus:
V
V
M
C
E
This is for fluid velocity (or velocity of the body through a stationary fluid) to that of a
sound wave in the same medium.
Arba Minch University WTI Leacture Notes Prepared Otoma 119
Hydraulics I and Hydraulics II Notes
C is the sonic velocity (or celerity) in the given medium.
(e) EULER NUMBER (Phenomenon governed by pressure forces.)
The ratio of Inertia forces to pressure forces for both prototype and model is given by:
Fi
V 2 L2 V 2
P
Fp
PL2
The square root of this dimensionless number is known as EULER NUMBER
Thus:
V
V
V
Eu
P
2P
2 g P
Similarity Laws or Model laws
(Eu).
The results obtained from the model tests may be transferred to the prototype by the use of
model laws, which may be developed, from the principle of dynamic similarity.
a) Reynold’s Model laws: inertia & viscous forces are the only predominant forces. The
similarity of flow in the model & its prototype can be established if the Reynold’s number is
the same for both systems.
(Re) model = (Re) prototype.
m vm Lm p Vp Lp
p V p Lp m
. . .
1
m
p
m Vm Lm p
r .Vr .Lr
V .L
1 r r
r
r
b) Froude Model Law: when gravitational force is added to the inertia force, the only
predominant force which controls the motion, the similarity of flow in any two such systems
(model &prototype) can be established if the Froude number for both the system is the same.
F r mod el F r prototype.
Vm
g m Lm
Vp
g p .Lp
Vr
1 or Vr
g r Lr
g r L r Lr
(For most of the case gr = gp /gm =1)
c) Euler Model Law
(Eu) model = (Eu) proto
Arba Minch University WTI Leacture Notes Prepared Otoma 120
Hydraulics I and Hydraulics II Notes
Vm
Pm
m
1
2
Vr Pr
Vp
Pp
p
1
2
Vr
Pr
r
1
1
2
r
Examples:
1) A 1:10 scale model of water supply piping system is to be tested at 200C to determine the
total head loss in the prototype that carries water at 850C. The prototype is designed to carry
5.0m3/s discharge with 1m diameter pipes. Determine the model discharge and model
velocity. Discuss how losses determined from the model are converted to proto type loss.
2) An over flow spillway is designed to be 100m high and 120mlong, carrying a discharge of
1200 m3/5 under an approaching head of 2.75m. The spillway operation is to be analyzed by a
1:50 model in a hydraulic laboratory. Determine
The model discharge,
If the discharge coefficient at the model crests measures 2.12, what is the prototype crest
discharge coefficient?
If the velocity at the outlet of the model spill way measures 25m/s, what is the prototype
velocity?
3) A 1:50 scale model is constructed to a study a gate prototype that is designed to drain a
reservoir. If the model reservoir is drained in 5.2 min, how long should if take to drain the
reservoir?
4) A 1 m long 1:50 model is used to study the wave force on a prototype of a sea wall structure.
If the total wave force measured on the model is 2.27 N and the velocity scale is 1: 10,
determine the force per unit length of the prototype.
Types of Models
In general, hydraulic models can be classified under two broad categories
I)
Undistorted models
II) Distorted models
I) Undistorted Models: - if a model is geometrically similar to its prototype, it is known as
undistorted models. i e., the scale ratios for the corresponding linear
dimension are the same.
II) Distorted models: - if one or more terms of the models are not identical with the prototype it
is known as distorted models. The distortion may be geometrical, or
material or hydraulic quantities or a combination of these.
In geometrical distortion, the distortion can be either of dimensions or that of configuration.
When different scale ratios are adopted for the longitudinal, transverse, & vertical dimensions;
then it is known as distortion of dimensions.
It is adopted in river models where a different slope ratio for depth is adopted.
The distortion of configuration results when the general configuration of the model doesn’t have
resemblance with its prototype. If
a river model has different bed slope ratio; this is distortion of configuration.
Arba Minch University WTI Leacture Notes Prepared Otoma 121
Hydraulics I and Hydraulics II Notes
The material distortion is occurred when the physical properties of the material used in the
model and prototype are different.
The distortion of hydraulic quantities is occurred for certain uncontrollable hydraulic quantities
such as time, discharge etc.
Distorted models are required to be prepared for rivers, dams across very wide rivers, harbors,
and estuaries etc. for which the horizontal dimensions are large in proportion to the vertical ones.
The following are some of the reasons for adopting distorted models:
a) to maintain accuracy in vertical measurements;
b) to maintain turbulent flow;
c) to obtain suitable bed material & its adequate movement;
d) to obtain suitable roughness condition;
e) to accommodate the available facilities such as space, money, water supply
& time.
CHAPTER 3
BOUNDARY LAYER THEORY
INTRODUCTION
When real fluid flows pass a solid boundary, a layer of fluid which comes in contact with the
boundary surface adheres to it on account of viscosity; since this layer of fluid can’t slip away
from the boundary surface it attains the same velocity as that of the boundary. In other words, at
the boundary surface there is no relative motion between the fluid and the boundary. This
condition is known as no slip condition. If the boundary is moving, the fluid adhering to it will
have the same velocity as that of the boundary. However, if the boundary is stationary, the fluid
velocity at the boundary surface will be zero. Thus at the boundary surface the layer of the fluid
undergoes retardation. This retarded layer of the fluid further causes retardation for the adjacent
layers of the fluid, there by developing a small region in the immediate vicinity of the boundary
surface in which the velocity of flowing fluid increases gradually from zero at the boundary
surface to the velocity of the main stream. This region is known as boundary layer.
In the boundary region since there is larger variation of velocity in a relatively small distance
there exists a fairly large velocity gradient ) normal to the boundary surface. As such in this
region of boundary layer even if the fluid has small viscosity, the corresponding shear stress τ =
µ( ), is of appreciable magnitude. Further away from the boundary this retardation due to the
presence of viscosity is negligible and the velocity there will be equal to that of the main stream.
The flow may thus be considered to have two regions, one close to the boundary in the boundary
layer zone in which due to larger velocity gradient appreciable viscous forces are produced and
hence in this region the effect of viscosity is mostly confined, and second outside the boundary
layer zone in which the viscous forces are negligible and hence the flow may be treated as nonviscous or in viscid.
In 1904 prendtl developed the concept of the boundary layer. He provides an important link
between ideal- fluid flow and real-fluid flow. For fluids having relatively small viscosity, the
effect of internal friction in a fluid is appreciable only in a narrow region surrounding the fluid
Arba Minch University WTI Leacture Notes Prepared Otoma 122
Hydraulics I and Hydraulics II Notes
boundaries. From this hypothesis, the flow outside the narrow region near the solid boundaries
can be considered as ideal flow or potential flow. Relation with the boundary- layer region can
be computed from the general equations for vitreous fluids, but use of the momentum equation
permits the developing of approximate equation for boundary- layer growth.
Activity: -3.1.1
What is the difference between idea-fluid and real-fluid?
3.1 Description of the Boundary Layer
It was assumed that the shearing action was occurring in a fluid sandwiched between a moving
belt and a stationary solid surface. The fluid was thus bounded on two sides. It may have
occurred to the reader that such a situation is not common in Hydraulic engineering. Some flow
(e.g. the flow of air around a building) are bounded on one side only, while others (e.g. the flow
through a pipe are completely surrounded by a stationary solid surface To develop the boundary
layer concept, it is helpful to begin with a flow bounded on one side only consider, therefore, a
rectilinear flow passing over a stationary flat plate which lies parallel to the flow as shown in
(Fig 3.1):
U
U
Transition
Turbulent
Fig 3- 1 Development of a boundary layer
The incident flow (i.e. the flow just upstream of the plate) has a uniform velocity U∞. As the flow
comes into contact with the plate, the layer of fluid immediately adjacent to the plate decelerates
(due to viscous friction) and comes to rest. This follows from the postulate that in viscous fluids
a thin layer of fluid actually ‘adheres’ to a solid surface. There is then a considerable shearing
action between the layer of fluid on the plate surface and the second layer of fluid. The second
layer is therefore forced to decelerate (though it is not quite brought to rest) creating a shearing
action with the third layer of fluid, and so on. As the fluid passes further along the plate, the zone
in which shearing action occurs tends to spread further out words. This zone is known as a
‘boundary layer’ outside the boundary layer the flow remains effectively free of shear, so the
fluid here is not subjected to viscosity- related forces. The fluid flow outside a boundary layer
may therefore be assumed to act like an ideal fluid.
Arba Minch University WTI Leacture Notes Prepared Otoma 123
Hydraulics I and Hydraulics II Notes
3.2 Boundary layer equations
Activity: -3.1.2
Why it is needed to quantify the boundary layer phenomena?
The boundary layer thickness, δ, is the distance in the y-direction from the solid surface
to the outer edge of the boundary layer. The usual convention is to assume that the edge
of the boundary layer occurs where:
The displacement thickness, δ*, is the distance by which a streamline is displaced due to
the boundary layer. Consider the velocity distribution at a section in the boundary layer
(Fig 3.2). In side boundary layer, the velocity is everywhere less than in the free stream.
The discharge through this cross section is correspondingly less than the discharge
through the same cross-sectional area in the free stream. This deficit in discharge can be
quantified for unit width and an equation may then be developed for δ*.
Deficit of discharge through an element
Defect through whole boundary layer section
Fig 3-2 Velocity distribution in a boundary layer
In the free stream an equivalent discharge would pass through a layer of depth δ*, so
The momentum thickness, θ, is analogous to the displacement thickness. It may be defined as
the depth of a layer in the free stream, which would pass a momentum flux equivalent to the
deficit due to the boundary layer.
Mass flow through element
Arba Minch University WTI Leacture Notes Prepared Otoma 124
Hydraulics I and Hydraulics II Notes
Deficit of momentum flux
Deficit through whole boundary layer section
In the free stream, an equivalent momentum flux would pass through a layer of depth, θ, and unit
width, so that
The definition of kinetic energy thickness
equation:
follows the same pattern, leading to the
The momentum integral equation is used to relate certain boundary layer parameters so
that numerical estimates may be made. Consider the longitudinal section through a
boundary layer (Fig 3.3), the section is bounded on it outer side by a streamline, BC, and
is l m wide. The discharge across CD is
U
B
C
o
A
D
L
Fig 3-3 Longitudinal Section through a boundary layer.
The momentum flux (= density x discharge x velocity):
As BC is a streamline, the discharge across AB must be the same are that across CD:
Arba Minch University WTI Leacture Notes Prepared Otoma 125
Hydraulics I and Hydraulics II Notes
The incident velocity at AB is
, so the momentum flux is:
Boundary layers are actually very thin, so it is reasonable to assume the velocities are in the X –
direction. The loss of momentum flux is due to the frictional shear force ( ) at the solid
surface. Therefore:
The negative sign follows from the fact that the frictional resistance acts in the opposite sense to
the velocity. The equation may be rearranged to give:
The frictional shear at the solid surface is not a constant, but varies with X, due to the growth of
the boundary layer. The shear force may therefore be expressed as:
Where: - is the shear stress between the fluid and the solid surface. The momentum integral
equation is therefore:
Arba Minch University WTI Leacture Notes Prepared Otoma 126
Hydraulics I and Hydraulics II Notes
Example 3.1.01: - The velocity distribution in the boundary layer is given as:
=
, in which = ( )
Compute the ratio of displacement thickness to boundary layer thickness ( ) and the momentum
thickness to boundary layer ( ).
Solution:
Therefore: θ=
=
=
=
=
=
=
Therefore:-
3.3 Boundary layer along a long thin plate and its characteristics
Consider a long thin plate held stationary in the direction parallel to the flow in a stream of
velocity
are shown in Fig 3.4. The plate is said to be held at zero incidence to the velocity of
flow and the velocity of flow is known as ‘free stream velocity’ or ‘ambient velocity’ or
‘potential velocity’ .At the leading edge of the plate the thickness of the boundary layer is zero,
but on downstream, for the fluid in contact with the boundary the velocity of flow is reduced to
zero and at some distance δ from the boundary the velocity is nearly . Hence a velocity
gradient is set up which develops shear resistance to the flow and retards the motion of the fluid.
Near the leading edge of the plate the fluid is retarded in thin layer. In other words, the boundary
layer near the leading edge is relatively thin. As this retarded layer of fluid moves downstream,
due to continued action of shear resistance more and more fluid is retarded. Thus the thickness of
the boundary layer δ goes on increasing in the downstream direction as shown in Fig 3.4
Activity: -3.1.3
What are the factors which influence the thickness of the boundary layer formation along
a flat smooth plate?
Arba Minch University WTI Leacture Notes Prepared Otoma 127
Hydraulics I and Hydraulics II Notes
Fig 3.4 Boundary layer and velocity distribution at Successive points along a flat plate.
As the boundary layer develops up to a certain portion of the plate from the leading edge the
flow in the boundary layer exhibits all the characteristics of laminar flow. This is so irrespective
of whether the flow of the incoming stream is laminar or turbulent. This is known as laminar
boundary layer. If the plate is sufficiently long, then beyond some distance from the leading edge
the laminar boundary layer becomes unstable and the flow in the boundary layer exhibits the
characteristics between theses of laminar and turbulent flow. This region of the boundary layer is
usually small and is known are transition region.
After the transition region the flow in the boundary layer becomes turbulent. In this portion of
the boundary layer there is a rapid increase in its thickness and it is known as turbulent boundary
layer. If the plate is very smooth, even in the region of turbulent boundary layer, there is a very
thin layer just adjacent to the boundary in which the flow is laminar. This thin layer is commonly
known as laminar sub layer, and its thickness in represented by .
The velocity distribution in a laminar boundary layer is parabolic
; and for
turbulent boundary layer the velocity distribution has been found to follow approximately either
the one-seventh power law
or it is logarithmic
.For laminar sub layer the
velocity distribution is parabolic, but since its thickness is usually very small, a linear
distribution can be assumed.
The change of boundary layer from laminar to turbulent mainly depend on the velocity of flow
U∞ of the approaching stream of fluid, the length X measured along the plate from the lending
edge, the mass density ρ of fluid and its dynamic viscosity μ. As such the Reynolds number R ex
(the suffix X indicating that it is calculated with the distance x are the characteristic
length) becomes a significant parameter in indicating the change of boundary layer from laminar
to turbulent. The value of Rex at which the boundary layer may change from laminar to turbulent
varies from 3 x 105 to 6 x105.
Activity: -3.1.4
Change of boundary layer from laminar to turbulent is also affected by several other factors
rather than state in the above, state some of them?
Arba Minch University WTI Leacture Notes Prepared Otoma 128
Hydraulics I and Hydraulics II Notes
3.4 Laminar boundary layer
For the laminar boundary layer Prandtl assumed that (trinomial velocity distribution)
For an assumed distribution which satisfiers the boundary conditions u = 0, y =0 and u = U∞, Y
= , the boundary – layer thickness as well as the shear at the boundary can be determined. The
velocity distribution is assumed to have the same for at each value of X,
,
When δ is unknown
The Prandtl assumption satisfy the boundary condition shear stress equation can be written
At the boundary
Then equate the two expressions for 0 yield
And rearranging gives
Arba Minch University WTI Leacture Notes Prepared Otoma 129
Hydraulics I and Hydraulics II Notes
Since is a function of X only in this equation integrating gives:
If =0 for x = 0, the constant of integration is zero Solving for
In which,
the plate.
leads to
is a Reynolds number based on the distance x from the leading edge of
Activity: -3.1.5 What do you understand from the above equation?
Substituting the value in to:-
The shear stress varies inversely as the square root of x and directly as the three halves power of
the velocity. The drag on one side of the plate of unit width is
Arba Minch University WTI Leacture Notes Prepared Otoma 130
Hydraulics I and Hydraulics II Notes
→Laminar boundary layer occur
(NR)L < 5 x 105
And drag coefficient
The drag can be expressed in terms of a drag coefficient CD Times the stagnation pressure
and the area of plate l (per unit breath)
3.5 Turbulent Boundary Layer
The momentum equation can be used to determine turbulent boundary- layer growth and shear
stress along a smooth plate in a manner analogous to the treatment of the laminar boundary layer.
The universal velocity- distribution law for smooth pipes provides the best basis, but the
calculations are involved. A simpler approach is used Prandtl one- seventh- power law .it is
, in which y is measured from the wall of the pipe and
is the pipe radius. Applying it
to flat plates produces
And
The method used to calculate the laminar boundary layer gives
By equating the expressions for shear stress, the differential equation for boundary layer
thickness is obtained as
After integrating and then assuming that the boundary layer is turbulent over the whole length of
the plate so that the initial conditions x = 0, = 0 can be used.
Arba Minch University WTI Leacture Notes Prepared Otoma 131
Hydraulics I and Hydraulics II Notes
Solving for δ gives
The thickness increases more rapidly in the turbulent boundary layer, in it the thickness increases
as, , but in the laminar boundary layer varies as x1/2.
To determine the drag on a smooth flat plate is eliminated in shear stress equation
And
Then
The drag per unit width on one side of the plate is
In terms of the drag coefficient:
Arba Minch University WTI Leacture Notes Prepared Otoma 132
Hydraulics I and Hydraulics II Notes
Assumed a logarithmic velocity distribution for the flow in the boundary layer and obtained the
semi- empirical relation as noted below
Example 3.1.02
A fluid of density 1000
and kinematic viscosity (v) 1*
of 10
Calculate the boundary layer thickness and shear stress at: a) 35mm from the leading edge.
b) 1500mm from the leading edge.
flow over a flat plate at a free stream velocity
Solution: a) Re=
Note that Re is low enough to allow the laminar boundary layer, so:
, where
b)
Note that Re is high enough to allow the turbulent boundary layer, so: -
Arba Minch University WTI Leacture Notes Prepared Otoma 133
Hydraulics I and Hydraulics II Notes
3.6 Separation of boundary layer
On a long flat plate, the boundary layer continues to grow in the downstream direction,
regardless of the length of the plate, when the pressure gradient remains zero, with the pressure
decreasing in the downstream direction, as in the conical reducing section the boundary layer
tends to be reducing in thickness.
For adverse pressure gradients, for that pressure increasing in the downstream direction, the
boundary layer thickness rapidly increases. The adverse gradient and the boundary shear
decrease the momentum in the boundary layer, and if both act over a sufficient distance, they
cause the boundary layer to come to rest. This phenomenon is called separation of the boundary
layer.
Fig3.5: - Boundary layer separation along a flat plate
Activity: -3.1.6 At least write three methods of controlling flow separation?
3.7 Drag and lift on a sphere and cylinder
Take an airfoil immersed in a fluid moving with velocity V
Fig3.6: - Lift and drag in airfoil immersed in water
Arba Minch University WTI Leacture Notes Prepared Otoma 134
Hydraulics I and Hydraulics II Notes
F = f (A, μ, V, ρ, K)
K = Bulls modules of elasticity of the fluid
Analyzing the above equation then dimensional analyses established the following relation ship
Then, Drag force: -
Lift force
Where: - CD =Drag coefficient
CL =Lift coefficient
F is the resultant force
Where:-
Arba Minch University WTI Leacture Notes Prepared Otoma 135
Hydraulics I and Hydraulics II Notes
Example 3.1.03
Experiments have been conducted in a wind tunnel with a wind speed of
on a flat plate of size 2m long
and 1m wide. The specific weight of air is
the plate is kept at such an angle that the coefficient of lift
and drag are 0.75 and 0.15 respectively. Determine:a. Lift force
b. Drag force
c. Resultant force, and
d. Power exerted by the air stream on the plate
Solution:-
a. Lift:
b. Drag:
c.
Resultant force:
Inclined at an angle of θ with the velocity of air such that:
d.
Power exerted by the air stream is:
On a sphere
Arba Minch University WTI Leacture Notes Prepared Otoma 136
Hydraulics I and Hydraulics II Notes
At very low Reynolds number, there is no flow separation from a sphere, the wave is laminar and
the drag is predominantly friction drag. Stokes has shown analytically, for very low Reynolds
number flows where inertia forces may be neglected, that drag force on a sphere of
dynamometer, D, moving at speed, V, through a fluid of Viscosity, is given by
And
Therefore,
On Cylinder
Two type of flow condition prevail when the fluid moves around on stationary cylindrical
members
Irotating uniform flow around a cylinder
Irotating flow of constant Circulation around a cylinder.
(a)
(b
Fig.3.7: - circulation and lift in flow about a
cylinder
Arba Minch University WTI Leacture Notes Prepared Otoma 137
Hydraulics I and Hydraulics II Notes
Where: R= Raider of cylinder
V = Uniform flow of fluid
V1 =Velocity at angle
V2 = velocity when the circulation is there around cylinder
Then: -
For stagnation points
The magnitude of the lift exerted on the cylinder due to the composite flow pattern may
be determined by integrating over the entire surface of the cylinder, the components of
the pressure forces on elementary surface areas normal to the direction of uniform flow.
Applying Bernoulli’s equation between any point in the unaffected flow and any point on
the surface of the cylinder, the pressure at any point on the cylinder is obtained as
In which P0 is the pressure in the uniform flow at some distance a head of the cylinder by
substituting the value U from the above expediting
The lift acting on an elementary surface area of the cylinder is given by:
In which L is the length of the cylinder. The negative sign has been introduced because
the pressure force is always directed towards the surface, and hence for
being
positive its component is negative being in the vertical down ward direction the total FL
exerted on the cylinder is obtained by integration
Which is reduces to a simple relationship: -
Arba Minch University WTI Leacture Notes Prepared Otoma 138
Hydraulics I and Hydraulics II Notes
Example 3.1.04: - A cylinder 1.2m in diameter is rotated about its axis in air having a velocity of 128km per hour.
A lift of 5886N per meter length of the cylinder is developed on the body. Assuming ideal fluid theory, find the
rotational speed and the location of the stagnation points. Given
Solution: The lift on the cylinder is given as:
And
Thus by substitution, we have:
But:
Where: we have
angular velocity and N is the rotational speed of the cylinder in r.p.m (revolution per minute). Thus
For the stagnation point, we have
Or
Problems
Assuming that the velocity distribution in the boundary layer is given by:=
Calculate: Displacement thickness ( )
Momentum thickness (θ)
Kinetic energy thickness ( )
If at a certain section, free stream velocity
was observed to be 10
and the
thickness of the boundary layer as 25mm then calculate the energy loss per unit length
due to the formation of the boundary layer. Take
Arba Minch University WTI Leacture Notes Prepared Otoma 139
Hydraulics I and Hydraulics II Notes
A plate 25mm long and 1.25m wide is moving under water in the direction of its
length. The drag force on the two sides of the plate is estimated to be 8500N.
calculate:
The velocity of the plate
The boundary layer thickness at the trailing edge of the plate, and
The distance at which the laminar boundary layer existing at the leading edge
transforms into turbulent boundary layer. Take for water: ρ= 1000
,
v=1*
A smooth flat plate 3m wide and 30m long is towed through still water at 20oC at
a speed of 6
. Determine the total drag on the plate and the drag on the first
3m of the plate. (
.
A submarine can be assumed to have cylindrical shape with round nose. Assume
its length to be 50m and diameter 5.0m, determine the total power required to
overcome boundary friction if it cruises at 8
velocity in sea water
at
,
.
The vertical component of the landing speed of the parachute is 6
. Treat the
parachute as an open hemisphere (figure below) and determine its diameter if the
total weight to be carried is 1200N. take
and
Fig. 3.8: assumed shaped of the parachute
Answer key
Activities:3.1.1: - For purposes of analysis, the assumption is frequently made that a
fluid is non -viscous (frictionless) and incompressible (inelastic). Such an imaginary fluid
is called ideal or perfect fluid. No real fluids fully comply with this concept, but some
liquids, including water, are near to an ideal fluid and the assumption is useful and
justified.
3.1.2: - Although the basic structure of a boundary layer is clear, the engineer usually
needs a precise numerical description for each particular problem. The basic parameters
and equations required will now be developed. In the interests of simplicity, this
Arba Minch University WTI Leacture Notes Prepared Otoma 140
Hydraulics I and Hydraulics II Notes
treatment will be restricted to a two- dimensional incompressible flow with constant
pressure.
3.1.3: -Some of the factors are stated below:
The boundary layer thickness increases are the distance from the leading edge increases
The boundary layer thickness decreases with the increase in the velocity of flow of the
approaching stream of fluid
Greater is the kinematics viscosity of the fluid greater is the boundary layer
thickness
The boundary layer thickness is considerably affected by the pressure gradient (∂p/∂x)
in the direction of flow. In the case of a flat plate placed in a stream of uniform Velocity
the pressure may also be assumed to be uniform i.e. (∂p/∂x) = 0 However, if the
pressure gradient is negative as in the case of a converging flow and it accelerates the
retarded fluid in the boundary layer. As Such the boundary layer growth is retarded in the
presence of negative pressure gradient. On the other hand if the pressure gradient is
positive as in the case of divergent flow the fluid in the boundary layer is further
decelerated and hence assists in thickening of the boundary layer.
3.1.4: -Change of boundary layer from laminar to turbulent is also affected by:
Roughness of the plate curvature
Pressure gradient
Intensity and scale of turbulence
3.1.5:-The above equation is boundary – layer thickness equation of laminar flow it
shows that increases as the squire root of the distance from the leading edge, and it is
mainly affected by the Reynolds number and the distance from the leading edge.
3.1.6: - The flow separation is undesirable, so it should be controlled, in order to control
there are different methods, some of these are stated below:
Suction: In this method, the slow moving fluid, which had been retarded by the
adverse gradient, is removed from the boundary layer by suction.
Acceleration: In this method, acceleration is imparted to the slow moving fluid.
This introduces a force to counter-act the effect of the adverse gradient.
Motion: In this method, the body is given a movement in the direction of motion
of the fluid. This helps in the prevention of the formation of the boundary layer.
Streamlining: In this method, the body is streamlined in shape. This shifts the
point of separation and reduces the wake to a minimum.
Conversion to turbulent layer: as the turbulent boundary layer is stronger than the
laminar boundary layer, attempts are made so that only turbulent boundary layer
is formed. The laminar boundary layer can be converted to turbulent boundary
layer by artificially roughening the surface of the body.
Problem solution:
3.1.1: - Solution: -The displacement thickness is given by: =
=
=
The momentum thickness is given by: -
Arba Minch University WTI Leacture Notes Prepared Otoma 141
Hydraulics I and Hydraulics II Notes
θ=
The energy thickness is given by: =
And the loss of energy per unit length due to the formation of the boundary layer is
given by: =
*25*
= 2.682N
3.1.2: - Solution: -Velocity of the plate, U
Since U is not known,
can’t be computed. Hence assume any reasonable
value of CD between 0.005 and 0.001. Let us assume CD= 0.002
Drag force (both sides),
=
ρ
8500=
=
Reynolds number,
(turbulent boundary layer)
Thus recalculation gives:
By another trail, we get
Thus recalculation gives:
And U=12.19
which is within reasonable accuracy.
The boundary layer thickness, δ:
The thickness of the boundary layer is given by:
The distance, :
Transition from laminar to turbulent boundary may be assumed to occur at
3.1.3: -Solution: -
Arba Minch University WTI Leacture Notes Prepared Otoma 142
Hydraulics I and Hydraulics II Notes
Drag on both sides of the plate:
Considering the point at which the boundary layer becomes turbulent, assume transition
at
, where is the transition length
Thus, it is reasonable to ignore the laminar layer compared with the 30m plate length.
Drag on the first 3m is then calculated in the same way as shown above for the full plate
length.
3.1.4: Solution: -Total power required to overcome boundary friction, P:
Reynolds number,
The length over which boundary layer will be laminar is given by,
This being very small, contribution to total drag from laminar boundary layer is
negligible; hence
is given by,
Area,
Therefore drag force,
Hence total power required to overcome boundary friction,
3.1.5: Solution: -Diameter of parachute, D;
Drag force,
Using the equation:
Or
Or
Arba Minch University WTI Leacture Notes Prepared Otoma 143
Hydraulics I and Hydraulics II Notes
CHAPTER 4
LAMINAR & TURBULENT FLOW
Fluid flow may be either viscous (laminar or streamline) or turbulent, the type of flow
VL
depending on the value of Reynolds number (Re=
)
What is laminar flow?
Laminar flow: - is defined as flow in which the fluid moves in layers, or laminas.
Instability & disturbances of flow is controlled by viscous shear forces that resist
relative motion of adjacent fluid layers.
Re less than 2000.
It occurs at Low velocity.
The viscous forces predominate over the inertial forces.
Rare in practice in water system.
Simple mathematical analysis possible.
Turbulent flow: - has very erratic motion of fluid particles, with a violent transverse
interchange of momentum.
It had completely disrupted the orderly movement of laminar flow.
Re greater than 4000.
The losses are directly proportional to the average velocity.
Average motion is in the direction of the flow.
Losses are proportional to the velocity to a power varying from 1.7 to 2.0.
Mathematical analysis very difficult.
ACTIVITY 1.1
1. What is the characteristic of laminar flow?
2. Enumerate example of laminar floe.
3. What is the difference between laminar and turbulent flow?
Arba Minch University WTI Leacture Notes Prepared Otoma 144
Hydraulics I and Hydraulics II Notes
4.1 LAMINAR FLOW BETWEEN PARALELLE PLATES
For steady flow b/n parallel inclined plates; the bottom plate fixed, the upper plate has a
constant velocity.
h
a
u
Fig.1
Analyzing the flow by taking a thin lamina of unit width as a free body, the equation of
motion yields:
Arba Minch University WTI Leacture Notes Prepared Otoma 145
Hydraulics I and Hydraulics II Notes
P
Y . . y. sin 0
. .Y .
PY PY
y
h
and dividing the eq n by the volume of element . y .1 :
uisng sin
P h ..........................................................................................(1)
y
d
because V is only a fun of y
y dy
p h d P h (b / c p h is a fun of only )
d
d
d 2u
d d du
. 2
( p h ) (2)
d
dy dy
dy
dy
Integratin g w.r.t Y :
d
du
p h C 1
.. y .
d
dy
and int egrating again
y2 d
p h C 1 Y C 2
2 d
y2 d
p h C 1 Y C 2 (3)
V
2 dl
To eualuate C 1 & C 2 take at y O, v 0 at bottom plate &
v
at y a , V U at upper plate , then
U 1 d
p h a
C 2 0 & C1
2 dl
a
1 d
UY
p h ay Y 2 (4)
V
2 d
a
For both plates fixed U=0 and the velocity distribution is parabolic with maximum
velocity at the mid plane.
Vmax = U =
a2 d
( p h) - ---------------------------------------------------4 (a)
8 dl
The discharge of the laminar flow per unit width of the plate can be obtained by
integrating eqn. (4) w. r. t. y, Yielding:
a
q vdy
o
ua
1 d
( p h)a 3 (5)
2 12 dl
Averagy velocity , v
q u
d d
p ha 2 (6)
a 2 12 dl
Arba Minch University WTI Leacture Notes Prepared Otoma 146
Hydraulics I and Hydraulics II Notes
For the both plate stationary, U= 0, then
1 d
p h aY Y 2 4 (b)
2 dl
1 d
p h a3
q
(6 a )
12 dl
v
The mean velocity of flow:
q
1 d
p h a 2 4(c)
a 12 dl
( for both plates stationary )
V
From eqn. 4 (a)& (4 c),
V
=
2/3 Vmax ---------------- ------------------------------------------------------------ 4 (d)
Shear stress Distribution
It is given by:
du
d UY
1 d
p h ay y 2
dy
dy a
2 d
U 1 d
p h a 2 y (7)
a 2 d
Point of Maximum velocity
Derive V in terms of
y
dv U
1 d
p h a 2Y 0
dy
a 2 d
U
a
a
Y
(8)
2 1 d p h
d
Head loss (Energy losses):
Arba Minch University WTI Leacture Notes Prepared Otoma 147
Hydraulics I and Hydraulics II Notes
From the equation (6)
d
p h 12 U V2 6U
d
a
2
d p h
1
12 V 6U
a2
p 2 p1 h2 h1 62
hlf
p
h1 f
p
a
6 L
2V U
a 2
12 V L
a 2
x2
dl
x1
L 2V U
( for upper plate moving ) (9)
(9a)
(For both plate stationary)
EXAMPLE
1. One plate moves relative to the other as shown where
and
Determine
a. Velocity,
b. Discharge and
c. shear stress at the upper plate.
Given
Dynamic viscosity
Density (
Solution
a. At upper point
Arba Minch University WTI Leacture Notes Prepared Otoma 148
Hydraulics I and Hydraulics II Notes
At the lower point
From the figure a=6mm=0.006m & u=-1m/s
Maximum velocity occur where
To get
substitute the value of y
Note the absolute maximum velocity occur at the moving plate (i.e y=0.006m) where
u=-1m/s.
b.
(Upper flow)
c.
Arba Minch University WTI Leacture Notes Prepared Otoma 149
Hydraulics I and Hydraulics II Notes
4.2 Laminar Flow in circular PIPE (Hagen – poiseuile law)
H
R
For steady, fully developed laminar flow there are normal forces (pressure forces) acting
on the left & right ends of the control volume, and that there are tangential forces (shear
forces) on the inner & outer cylindrical surfaces.
It the pressure at the center of the annular control volume is p, then the force on the left
end is:
p dx
(i )
p
2r dr
x 2
The force on the ritht end is
p dx
p
2 rdr
x 2
ii
If the shear stress at the center of the annular control volume is then the shear force
on the inner cylindrical surfaces is:
d dr
dr
. 2 r dx (iii)
dr 2
2
The
shear force on the outer cylindrical surface is:
Arba Minch University WTI Leacture Notes Prepared Otoma 150
Hydraulics I and Hydraulics II Notes
(
d dr
dr
)2 r dx iv
dr 2
2
The summation of the x- components of forces acting on the control volume must be
zero. Thus:
p dx
p dx
d dr
dr
. 2 rdr p
p
2 rdr
2 r dx
x
2
x
2
dr
2
2
d dr
dr
r
2 dx 0
dr
2
2
p
d
2 rdr dx dr .2 dx
r . dr 2 dx 0 (v)
x
dr
Dividing this eqn. by 2 rdr dx gives
p
d
1 d
r (vi)
x
dr
r dr
r
d
r r . p
Integrating this eq n
dr
x
r 2 p
r .
via
C1
2 x
dv
Substituti ng
dr
dv r p C
. 1
vi(b)
dr 2 x
r
V
r 2 p C1
ln r C 2
4 x
At the center for r = o, V= Vmax is finite, hence C1 =0 other wise
V (r=o) will be infinite.
The boundary condition, at the pipe wall r = R ,v =0 therefore:
Arba Minch University WTI Leacture Notes Prepared Otoma 151
Hydraulics I and Hydraulics II Notes
C2
R 2 p
4 x
r 2 p R 2 p
4 x 4 x
and hence, V
1 p 2
2
r R
4 x
V
(vii)
The velocity distribution has parabolic pattern, & the max. velocity occurs at the centre of
the pipe & (i.e. r = 0)
Thus: Vmax =
1
4
p 2
R (viii)
x
From eqn. (Viii) & (vii), we have
V = Vmax . 1 r / R 2
(ix)
Volume flow Rate
dQ V .dA V .2r dr
dQ
1 p 2
2
r R
4 x
2r dr
p 2
2
r R rdr
= 2 x
By integrating both sides
p
2
2
Q
r R r dr
2 x 0
R
Q
4
R
8
P
( x)
x
Arba Minch University WTI Leacture Notes Prepared Otoma 152
Hydraulics I and Hydraulics II Notes
The mean velocity of flow ( V )
Q
is given by :
V , Q / A
R 2
1 P 2
V
R
8 x
1 P 2
D
32 x
1
V V max
2
( xi )
From eqn. (x) & (xii (a), mean Velocity occurs at:
r
R
0.707 R
2
The Shear stress Distribution
dv r p
From eq n via above C1 0
dr 2 x
Head loss:
p 32 V
( from eg ( xii )
D2
x
p1 p 2
32 V
or
L
D2
P1 P 2
hlf
32 V L
QL
( Hagen poiseuille eqn.)
128
2
D
D 4
p1 p 2
64
Re
32 VL
D 2
LV 2 128QL
2 gD
D 4
( xiiii )
( xiii (a)
From Darcy- weisbach eqn. the head loss due to frictional resistance in a long straight
pipe of length L diameter, D & mean velocity V is given as:
Arba Minch University WTI Leacture Notes Prepared Otoma 153
Hydraulics I and Hydraulics II Notes
2
L V
hf f
D 2g
From these two head losses eqn.
L V 2 32 VL
f
D 2g
D 2
64
64
f
Re V D
( xiiii (b))
Where f is the friction factor of a pipe.
ACTIVITY 1.2
1. For steady laminar flow through a circular pipe prove that the velocity
distribution across the section is parabolic and the average velocity is half of
the maximum local velocity.
2. Show that the value of co-efficient of friction for viscous flow through a
circular pipe given by
.
Note: - The above equations are derived for horizontal pipes, but for inclined pipe it is
given as:
V
1 d
p h ( r 2 R2 )
4 dl
Arba Minch University WTI Leacture Notes Prepared Otoma 154
Hydraulics I and Hydraulics II Notes
4.3 Fully Developed Turbulent flow in pipe
Shearing in turbulent flows is both difficult to Visualize & less amenable to mathematical
treatment. As consequence, the solutions of problems involving turbulent flows tend to
invoke experimental data.
In turbulent flow, a streamline broken into an eddy formation, that its success passage
leads to a measurable fluctuation in the velocity at a given point. The eddies are generally
irregular in size & shape, so the fluctuation of velocity with time is correspondingly
irregular. For convenience, this fluctuating velocity is broken down into two components:
average velocity at a point u and fluctuating components U’ (in the x-direction),v’ ( in
y-direction) & w’ ( in z-direction).
Fig.3 Turbulent fluctuations in direction of flow
U U U'
(in the x direction )
1 t To
U
udt.
To t
U'
1
To
t To
t
(U U )dt
1
To
t To
t
Udt
1 t To
U dt
To t
U U 0
(The mean value of fluctuation)
In turbulent flow, no simple relation exists between the shear stress field & the
momentum velocity field. Velocity fluctuations in turbulent flow exchange momentum
between adjacent layers of fluid, thereby causing apparent shear stress that must be
added to the stress caused by the mean velocity gradients. For fully developed turbulent
channel flow, the total shear stress given by:
du
U 'V ' ………………………………………………….(A)
dy
y-is the distance from the pipe;
U -is the mean velocity;
Arba Minch University WTI Leacture Notes Prepared Otoma 155
Hydraulics I and Hydraulics II Notes
U’,V’- fluctuating components of velocity in the x & y directions;
U 'V ' - is referred as the Reynolds stress
The apparent shear stress in turbulent flow is expressed in a form similar to Newton’s
viscosity law, that is,
U 'V ' t
U
y ………………………………………(B)
Where, - is an empirical coefficient called the eddy viscosity.
ACTIVITY 1.3
1. What is turbulence?
2. What are characteristics of turbulent flow?
Prandtl’s Mixing Length
In Prandtl’s theory, expressions for U’ & V’ are obtained in terms of a mixing-length
distance ‘l’ & the velocity gradient du/dy.
Prandtl assumed that a particle of fluid is displaced a distance ‘l’ before its momentum is
changed by the new Environment. The fluctuation U’&V’ is then related to ‘l’ by
U' V'
du
……………………………………………(C)
dy
By substituting for U’ &V’
2
xyt
du
t U 'V '
dy ………………………………………(D)
2
Comparing eqn. (B) & eqn. (D), the eddy viscosity is:
2
du
………………………………………………….(E)
dy
In turbulent flow there is a violent change of parcels of fluid except at a boundary, or
very near to it, where this inter change is reduced to zero; hence l must approach zero at a
fluid boundary.
The particular relationship of to wall distance y is suggested by Von Karman as:
Arba Minch University WTI Leacture Notes Prepared Otoma 156
Hydraulics I and Hydraulics II Notes
k
du / dy
…………………………………(F)
d 2u / dy 2
Where,
k = is universal constant in turbulent flow, known as Von Karman is coefficient (= 0.4)
Velocity Distribution in Turbulent shear flows
In turbulent flow there is no universal relationship b/n the stress field & the mean
velocity field. It is convenient to visualize the turbulent-shear layer near a smooth wall to
be divided in to three layers:
In the region very close to the wall, where viscous shear is dominant, the mean velocity
profile follows the linear viscous (laminar) relation, within region y ' , Thus:
o
u
u
y . y ,
y '
' = is laminar height &
o
= has dimension of velocity & is called the shear stress or friction
velocity u*. Hence
u u . y
,
U*
y ' (G )
y- is the distance measured from the wall (Y=R -r, pipe radius)
u - is the mean velocity.
ν –is kinematics viscosity
Equation (G) is valid for 0
' 5
u* Y
5, that is,
v
v
------------------------------------------------- (H)
u*
(Viscous sub layer)
Arba Minch University WTI Leacture Notes Prepared Otoma 157
Hydraulics I and Hydraulics II Notes
In the overlap layer it is assumed that the shear stress is approximately equal to the shear
stress at the wall, but turbulent dominates:
o 2 du dy
Hence,
o
2
( from eqn. ( D)
du
dy
From dimensional consideration is proportional to y, therefore, take =ky
Hence,
du dy 1 dy
……………………………..…..(I)
u* ky k y
and Integrating:
u 1
ln y cons tan t
u* k
( k 0.4) …………………(J)
u= umax=U, at y =R,
u max
2.5 nR c
u*
c u max 2.5 u n( R),
Therefore,
u u max 2.5 u* n y ………………………………… (K)
R
The velocity profile for turbulent flow through a smooth pipe can be represented by the
empirical “Power-law” eqn,
u
umax
1
1
u y n r n
1
um R
R
Where n- varies with the Reynolds number
The power-low profile is not applicable close to the wall y R 0.04 ; the variation of
the exponent, n, in the power law profile with Reynolds number (based on pipe diameter,
D, & centerline velocity, umax)
Arba Minch University WTI Leacture Notes Prepared Otoma 158
Hydraulics I and Hydraulics II Notes
A value of n=7 often used for the exponent; this gives rise to the term “a one-seventh
power profile” for fully developed turbulent flow.
EXAMPLE
1. In a pipe of diameter 0.6m length of 4500m water is flow at the rate of 0.6m3/s. if
the average height of roughness is 0.48mm find the power required to maintain
the flow. take co-efficient of friction f=0.00465
Given
Diameter of the pipe (D) =0.6m, radius (R)=0.6/2=0.3m
Length of the pipe (L) =4500m
Discharge (Q) = 0.6m3/s
Co-efficient of friction f=0.00465
Solution
Power required maintaining the flow,
Where
Problem
1. Water having kinematic viscosity =10-6 m2/s is flowing in pipe of Diameter =20cm
has V=1.5m/s and has slope of 1m per 100m. Determine a.
b.
c. f(friction factor)
2. A small horizontal tube of D=3.0mm L=40m is connected to the reservoir to discharge
for 10 sec. Calculate maximum velocity.
Arba Minch University WTI Leacture Notes Prepared Otoma 159
Hydraulics I and Hydraulics II Notes
CHAPTER 5
FLOW THROUGH PIPES
Introduction
Pipes were introduced in the earliest days of the practice of hydraulics. Their common
place use today makes it of great importance that the laws governing the flow in them
should be fully understood.
Water is conveyed from its source, normally in pressure pipelines, to water treatment
plants where it enters the distribution system & finally arrives at the consumer. In
addition, oil, gas, irrigation water, sewerage can be conveyed by pipeline system.
Some loss of energy is inevitable in the flow of any real fluid. In the case of flow in a
horizontal uniform pipeline, this is evidenced by the fall of pressure in the direction of
flow. Predicting the energy loss per unit length is essential to efficient pipeline design.
The prime concern in the analysis of real flows is to account for the effect of friction. The
effect of friction is to decrease the pressure, causing a pressure ‘loss’ compared to the
ideal, frictionless flow case. The loss will be divided into major losses (due to friction in
fully developed flow in constant area portions of the system) & minor losses (due to flow
through valves, elbow fittings & frictional effects in other non-constant –area portions of
the system).
Figure 5.1 Flow in the pipes (circular pipe)
z1
P1
V12
P V2
z2 2 2 hL ……………………………………….5.1
2g
2g
hL = Head loss (major + minor)
Arba Minch University WTI Leacture Notes Prepared Otoma 160
Hydraulics I and Hydraulics II Notes
Activity 5.1: Define the term pipe flow?
5.1 Major Losses (Head loss in conduits of constant cross-section)
Referring to Figure 5.1 and for equilibrium in steady flow, the summation of forces
acting on any fluid element must be equal to zero, i.e. F 0,
p1 A p2 A W sin o ( pL) 0
( z1 z2 )
L
o - average shear stress (average shear force per unit area) at the conduit wall, is
sin
defined by:
o
P
1
o dP ……………..………………………… (5.2)
P 0
o - is the local shear stress1 acting over a small incremental portion dP of the
wetted perimeter.
p1 A p2 A AL
p1
p1
z1
p2
z2 o
p2
z2 z1
L
( z2 z1 ) o
o
PL 0
PL
0
A
PL
…………………………………… (5.3)
A
Form the above equations (5.1) and (5.3)
hL o
p
PL p1
z1 2 z2
A
hL o
L
………………………………………… (5.4)
Rh
This equation is applicable to any shape of uniform cross-sections, regardless of
whether the flow is laminar or turbulent. For smooth-walled conduits, where wall
roughness may be neglected, it may be assumed that the average shear stress o is a
Arba Minch University WTI Leacture Notes Prepared Otoma 161
Hydraulics I and Hydraulics II Notes
function of , , & some characteristic linear dimension, which will here be taken as
hydraulic radius R. Thus:
The local shear stress varies from point to point around the perimeter of all conduits
(irrespective of whether the wall is smooth or rough), except for the case of a circular
pipe flowing full where the shear stress at the wall is the same at all points of the
perimeter.
o = (, , , R)
By dimensional analysis:
RhV
V 2 (Re) and let (Re) = ½ Cf (dimensionless term)
o V 2
o Cf
V2
………………………………………………. (5.5)
2
hL C f
From equation (4.4):
L V2
..…………………………….. (5.6)
Rh 2 g
(Applied for any shape of smooth walled conduits).
For circular conduits (pipe) flowing full, R= ¼ D, Therefore,
L V2
L V2
hL C f 4
f
………………………………… (5.7)
D 2g
D 2g
Where,
f 4C f 8 Re …………………………..…………… (5.8)
Equation (5.7) is applicable for both smooth-walled and rough walled conduits. It is
known as pipe –friction equation, and commonly referred to as the Darcy-Weisbach
equation. Friction factor, f, is dimensionless and is also some function of Reynolds
number. The exact form of Re and numerical values for Cf and f must be determined
by experiments or other means.
For laminar flow (Recall chapter three)
f 64
Head loss:
v
64
DV Re
( for la min ar flow) ………………….. (5.9))
2
64 L V
hf
…………………………………… (5.10)
Re D 2 g
Experimental Investigation on friction losses in Turbulent flow
Arba Minch University WTI Leacture Notes Prepared Otoma 162
Hydraulics I and Hydraulics II Notes
In fully developed turbulent flow, the pressure drop, p, due to friction in a horizontal
constant area pipe depends upon the diameter, D, the pipe length, L, the pipe
roughness,, the average velocity,
V , the fluid density, ρ, and the fluid viscosity, .
By dimensional analysis
p (V , D, , , )
L
P
, ,
2
V
vD D D
hL
V
2
g
L
Re,
D
D
hL
L
1 Re,
V 2g D
D
2
f 1 Re, ……………………………………… (5.11)
D
Blasius had concluded that there were two types of pipe friction in turbulent flow.
The first is the smooth pipes where the viscosity effects predominate so that the
friction factor is dependent solely on the Reynolds number (f= (Re). He deduced
the following expression for the friction in smooth pipes:
0.316
………………………………………… (5.12)
4
Re
The second type was relevant to rough pipes where the viscosity & roughness effects
influence the flow & the friction factor (f) is dependent both on the Reynolds number & a
parameter of relative roughness (/D).L.F Moody prepared a chart for determining
friction factor for rough pipes experimentally by plotting f versus Re curve for each value
of . (See Moody Chart)
D
The moody chart, the various flows it represents, may be divided into four zones: the
laminar flow zone; a critical zone where values are uncertain because the flow might be
either laminar or turbulent; a transition zone. Where f is a function of both Reynolds
number and relative pipe roughness; and a zone of complete turbulence (fully rough pipe
flow), where the value of f is independent of Reynolds number and depends solely upon
the relative roughness.
f
Arba Minch University WTI Leacture Notes Prepared Otoma 163
Hydraulics I and Hydraulics II Notes
There is no sharp line of demarcation between the transition zone and the zone of
complete turbulence. The dashed line that separates the two zone was suggested by R. J.
S. Piggott; the equation of this line is Re= 3500
. On the other hand side of the
( D)
equation of this line is corresponding to the curve and not the grid.
The Colebrook has developed the formula:
2.523
0.809 ln D
3.7 Re f
f
1
…………………………………… (5.13)
A simplified form of this equation is provided with restriction placed on it:
6
12
10 10
f
D
…………………………… (5.14)
2
5.74
8
5000 Re 10
n( 3.7 D R 0.9
1.325
(For Rough pipes)
Head loss in pipes is given by:
hL f
L V2
D 2g
(For all pipes rough, smooth, laminar, & turbulent)
Activity 5.2: Define the term: Major energy losses in a pipe.
Example 5.1; in a pipe of diameter 350 mm and length 75 m water is flowing at a
velocity of 2.8 m/s. find the head loss due to friction using:
i.
Darcy Weisbach formulae
ii. Chezy`s formula for when C=55.
Assume kinematic viscosity of the water as 0.012 stokes.
Solution: D= 350 mm=0.35 m , L= 75 m , V=2.8 m/s , C=55
V= 0.012 stokes= 0.012*10-4 m2/s
Head loss due to friction, hf:
i.
Darcy Weisbach formulae;
Arba Minch University WTI Leacture Notes Prepared Otoma 164
Hydraulics I and Hydraulics II Notes
where f=coefficient of friction ( a function of Reynolds number)
=8.167* 105
f=
=
=0.00263
Therefore,
= 0.9 m (Ans)
ii. Chezy’s formulae:
V= C
Where C= 55, m= =
Therefore
= =
=0.0875 m
2.8=55*
i=0.0296
but , i=
=0.0296
hf =i*L= 0.0296*75=2.22m
hf= 2.22m
Example 5.2 : a water flow through a pipe of diameter 300 mm with a volume of 5 m/s.if
the coefficient of fraction given by f=0.015+
, where Re is the Reynolds number ,
find the head loss due to friction for length of 10 m, take kinematic viscosity of water as
0.01 stokes.
Solution: Diameter of the pipe, D=300mm=0.3, V=5 m/s , l=10 m, viscosity of water ,v=
0.01 stokes=0.01*10-4 m2/s, (take , 1 stoke=1 cm2/s=10-4m2/s)
Head loss due to friction hf;
Coefficient of friction, f=0.015+
,
But the Reynolds number , Re
Therefore, f=0.015+
=
=1.58*106
=
=0.0161,
Therefore head loss due to friction,
=
, hf= 2.735 m (Ans)
Arba Minch University WTI Leacture Notes Prepared Otoma 165
Hydraulics I and Hydraulics II Notes
5.2 Minor losses in the pipes
Loss due to the local disturbances of the flow conduits such as changes in cross-section;
bend, elbows, valves, joints, etc are called minor losses. In case of a very long pipe, these
losses may be insignificant in comparison with the fluid friction in the length considered.
Whenever, the velocity of a flowing stream is altered either in direction or in magnitude
in turbulent flow, eddy currents are set up and a loss of energy in excess of the pipe
friction in that same length is createdi. Head losses in decelerating (i.e., diverging) flow is
much larger than that in accelerating (i.e., converging) flow.
In laminar flow these losses are insignificant, because irregularities in the flow boundary
create a minimal disturbance to the flow and separation is essentially nonexistent.
The most common minor losses can be represented in one of two ways. It may be
expressed as kv2/2g, where the loss coefficient k must be determined for each case. Or it
may be expressed as an equivalent length of a straight pipe, usually in terms of the
number of pipe diameters, N. Since,
k
V2
f ND V 2
, it follows that k Nf .
2g
D 2g
i. Loss of head at entrance
A poorly designed inlet to a pipe can cause an appreciable head loss. Referring to Figure
5.2 it may be seen that, a cross section with maximum velocity and minimum pressure at
B. This minimum flow area is known as the vena contracta.
Figure 5.2 Condition at
entrance
It is seen that the loss of energy at entrance is distributed along the length AC, a distance
of several diameters. The increased turbulence and vortex motion in this portion of the
pipe cause the friction loss to be much greater than in a corresponding length where the
flow is normal, as it is shown by the drop of the total-energy line. Of this total loss, a
small portion hf would be due to the normal pipe friction (See figure 5.2). Hence, the
Arba Minch University WTI Leacture Notes Prepared Otoma 166
Hydraulics I and Hydraulics II Notes
difference between this and that total, or he' is the true value of the extra loss caused at
entrance.
The loss of head at entrance may be expressed as
'
e
h
k V
e
2
2g
…………………………………….. (5.15)
Where V is the mean velocity in the pipe, and ke is the loss coefficient
Figure
Entrance Loss
Loss Coefficients
Coefficients
Figure 5.4
5.3 Entrance
ii. Loss of head at submerged discharges: (leave of pipe), (hd’)
When the fluid with a velocity V is discharged from the end of a pipe in to a large
reservoir, (v = 0), the entire kinetic energy of the coming flow is dissipated.
This may be shown by writing an energy equation between (a) and (b) in Figure 5.4
Taking the datum plane through (a) and recognizing that the pressure head of the fluid at
(a) is y, its depth below the surface, H a y 0 V 2 2 g and H c 0 y 0 . Therefore,
V2
h Ha Hc
……………………………….. (5.16)
2g
'
d
Figure 5.4 Submerged
Discharge Loss
Arba Minch University WTI Leacture Notes Prepared Otoma 167
Hydraulics I and Hydraulics II Notes
iii. Loss due to contraction (hc)
a) Sudden contraction
There is a marked drop in pressure due to increase in velocity and to the loss of energy in
turbulence. The loss of head for sudden contraction may be represented by
V22
…………………………………. (5.17)
h kC
2g
'
c
Figure 5.5 Loss due to
sudden contraction
Table 5.1 Loss coefficients for sudden contraction
D2
KC
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.50
0.45
0.42
0.39
0.36
0.33
0.28
0.22
0.15
0.06
0.00
D1
b) Gradual contraction
In order to reduces high losses, abrupt changes of cross section should be avoided. This is
accomplished by changing from one diameter to the other by means of a smoothly curved
transition or by employing the frustum of a cone. With a smoothly curved transition a
loss coefficient kc as small as 0.05 is possible. For conical reducers, a minimum kc of
about 0.10 is obtained, with a total cone angle of 20-400. Smaller or larger total cone
angle results in higher values of kc.
A nozzle at the end of a pipe line is a special case of gradual contraction. The head loss
through a nozzle at the end of a pipeline is given by equation (5.17), where kc is the
nozzle loss coefficient whose value commonly ranges from 0.04 to 0.20 and vj is the jet
velocity. The head loss through a nozzle cannot be regarded as a minor loss because the
jet velocity head is usually quite large.
Arba Minch University WTI Leacture Notes Prepared Otoma 168
Hydraulics I and Hydraulics II Notes
iv. Loss due to Expansion (he)
a) Sudden Expansion
Both the figures in Figure 5.6, drawn to scale from test measurements for the same
diameter ratios and the same velocities, and show that the loss due to sudden expansion is
greater than the loss due to a corresponding contraction. This is so because of the inherent
instability of flow in an expansion where the diverging paths of the flow tend to
encourage the formation of eddies within the flow. Moreover, separation of the flow from
the wall of the conduit induces pockets of eddying turbulence outside the flow region. In
converging flow, there is a dampening effect on eddy formation, and the conversion from
pressure energy to kinetic energy is quite efficient.
After the flow enters expanded pipe, there is excessive turbulence and formation of
eddies which causes loss of energy. The loss due to sudden enlargement in a pipe line
system can be calculated with the application of energy and momentum equations by
neglecting the small shear force exerted on the walls of between sections 1 and 2
(figure5.6) for steady incompressible turbulent flow.
Figure 5.6 Loss due to sudden enlargement
Rate of momentum between section (1) & (2)
p1 A2 p2 A2
g
( A2V22 A1V12 )
Energy relation between section (1) & (2)
p1
Solving for
p1 p2
v12
p
v2
2 2 he
2g
2g
in each equation and equating the results
Arba Minch University WTI Leacture Notes Prepared Otoma 169
Hydraulics I and Hydraulics II Notes
v22 v2v1 v22 v12
he
g
2g
And noting that from continuity equation A1V1 = A2V2 and that
A1V21 = (A1V1) V1 = (A2V2)V1
Substituting in the above equation
2
2
(V V ) 2 D 2 V 2 D 2 V 2
h 1 2 1 12 1 22 1 2 …………………………….. (5.18)
2g
D2 2 g D1
2g
'
x
Example 5.3: At a sudden enlargement of water main from 240 mm to 480mm diameter,
the hydraulic gradient rises 10mm. determine the rate of flow.
Solution: D1= 240 mm=0.24,
D2=480 mm=0.48m
-rise of hydraulic gradient, i.e.
+
)-(
+
[The term
) =10mm=0.01
+Z) prescribes hydraulic gradient rate of flow, Q
Applying Bernoulli’s equation to small and large pipe section (1-1) and (2-2)
+
+
But
= +
+
+
=
From continuity equations, we have
=
Therefore,
Or
=
=
=
*
=
*
=
*
=
=
Now substituting the value of
+
+
= +
+
and
in equation (1), we have
+
Arba Minch University WTI Leacture Notes Prepared Otoma 170
Hydraulics I and Hydraulics II Notes
-
-
=
+
)-(
+
) or
=0.01 or
=0.181m/s
b) Gradual Expansion
To minimize the loss accompanying a reduction in velocity a diffuser may be used.
Diffuser is a curved outline, or it may be a frustum of cone. In figure (5.8) the head loss
will be some function of the angle of divergence and also of the ratio of two areas, the
length of the diffuser being determined by these two variables.
Figure 5.7 Loss due to gradual enlargement
In flow through a diffuser, the total loss may be considered as made up of two
components. One is the ordinary pipe-friction loss, which may be represented by
he
f V2
.
dL .
D 2g
In order to integrate, it is necessary to express the variables f, D, and V as functions of L.
For our present purpose, it is sufficient, however, merely to note that the friction loss
increases with the length of the cone. Hence, for given values of D1 and D2, the larger the
angle of the cone, the less its length and the less the pipe friction.
The other is turbulence loss due to divergence. Turbulence loss increase with the degree
of divergence, if the rate of divergence is great enough then there may be a separation at
the wall and eddies flowing backward along the walls.
Arba Minch University WTI Leacture Notes Prepared Otoma 171
Hydraulics I and Hydraulics II Notes
The total loss for gradual expansion pipe is the sum of these two losses, marked k ' . It has
been seen that the loss due to a sudden enlargement is very nearly represented
by V1 V2 2 g . The loss due to a gradual enlargement is expressed as
2
h k
'
'
V1 V2 2 ……………………………………. (5.19)
2g
Where K’ loss coefficient which is a function of cone angle
Table 5.2 Loss coefficients for gradual expansion
K’
0.4
0.6
0.95
1.1
1.18
1.09
0
0
0
0
0
20
30
40
50
60
900
1.0
1200
1.0
180
v. Loss in pipe fittings
V2
where v is the velocity
2g
in a pipe of the nominal size of the fitting. Typical values are given below.
Table 5.3 Values of “Kf” based on the type of fittings.
Table 5.3 values of k f loss for pipe fittings
The loss of head in pipefittings is expressed as
Fitting
Globe valve, wide open
Angle valve, wide open
Close –return bend
T-through side outlet
Short-radius elbow
Medium radius elbow
Long radius elbow
Gate valve, wide open
Half open
Pump foot value
Standard branch flow
hf k f
K
10
5
2.2
1.8
0.9
0.75
0.60
0.19
2.06
5.60
1.80
vi. Losses in bend & Elbow
In flow around a bend or elbow, because of centrifugal effects, there is an increase in
pressure along the outer wall and a decrease in pressure along the inner wall. Most of the
loss of head in a sharp bend may be eliminated by the use of a vaned elbow. The vane
tends to impede the formation of the secondary flow that would otherwise occur.
The head loss produced by a bend or elbow is:
Arba Minch University WTI Leacture Notes Prepared Otoma 172
Hydraulics I and Hydraulics II Notes
hb k b .
V2
………………………….(5.19i)
2g
kb - depends on the ratio of curvature r to pipe diameter D.
Figure 5.8 secondary flows in bend
Figure 5.9 Vanned elbow
Activity 5.3: a) Define the term: Minor losses in a pipe.
b) Discuss on all types of losses that can be considered as minor losses.
c) Derive the formula for calculating loss of head due to:
(I)
Sudden enlargement, and
(II)
Sudden contraction.
Solution of single-pipe flow problems
The fundamental fluid mechanics associated with frictional loss of energy in single pipe
flow, caused by both the wall roughness of the pipes and by pipe fittings that disturb the
flow (minor losses).
It is generally conceded that for pipes of length greater than 1000 diameters, the error
incurred by neglecting minor losses is less than that inherent in selecting a value for the
friction factor f , n, or CHW .
Arba Minch University WTI Leacture Notes Prepared Otoma 173
Hydraulics I and Hydraulics II Notes
When minor losses are negligible, as they often are, pipe flow problems may be solved
by the methods, which are available are Hazen-Williams equation, the Manning equation
or the Darcy-Welsbach equation. The Darcy-Welsbach equation is to be preferred, since
it will provide greater accuracy because its application utilizes the basic parameters that
influence pipe friction, namely, Reynolds Number Re and the relative roughness D .
To get good results with the Hazen-Williams and Manning’s equations, the user must
have selected proper values for CHW and n, respectively.
The total head losses between two points is the sum of the pipe friction loss plus the
minor losses, or
hL h Lf h' ………………………………… (5.20)
Where h L = total head loss
h Lf = major head loss
h = total minor losses
'
In problem where f is given, equation (5.18) still has only one unknown, namely, hL or V
or Q or D. In most cases, this equation is explicit in the unknown, and so it is easy to
solve. However, for sizing problems, the resulting equation in D is of the fifth degree,
requiring trial and error or an equation solver.
The universal turbulent flow equation for use in an equation solver, including minor
losses, eliminating h Lf and equation (5.19) with the help of equation (5.7) and (5.11), and
by replacing V by 4Q D 2 . Expressing minor losses
h in terms of kV
'
2
2g ,
L D
LD
D 2.51
2 log
2
4
2
4
…………………. (5.21)
gD hL
gD hL
3.7
4Q
k
k
8Q 2
8Q 2
An important reminder when using these equations is to use Reynolds equation to check
the Reynolds number and confirm that the flow is turbulent. If Re < 2000 the flow is
laminar and the problem must instead be solved with equation (5.16).
Activity 5.4: Why the Darcy-Welsbach equation is preferable than the other
equations which are used to solve pipe flow problems?
5.3 Pipeline system
5.3.1 Pipes in Series
When two pipes of different sizes or roughness are so connected that the fluid flows
through one pipe& then through the other, they are said to be connected in series. A
typical series pipe problem, in which head H may be wanted for a given discharge or the
Arba Minch University WTI Leacture Notes Prepared Otoma 174
Hydraulics I and Hydraulics II Notes
discharge wanted for a given H, is illustrated in figure 5.12 and the continuity equations
establish the following two simple relations that must be satisfied.
Q Q1 Q2 Q3 ... Qn .
hL hL1 hL 2 hL 3 ...
Figure 5.12 Pipes Connected in Series
Applying the energy equation from A to B, including all losses, gives:
PA
2
ZA
VA
p
V2
B B Z B hi h f 1 he' h f 2 hd '
2g
2g
V2
L V
V V2
H 0 0 0 0 0 ki 1 f1 1 1 1
2g
D1 2 g
2g
2
V1 D1 V2 D2
2
From continuty equation. :
2
2
2
2
L V
V
f2 2 2 2
D2 2 g 2 g
2
2
V2
L
f L2
H 1 ki f 1 1 1 D1
2
D2
2g
D1
D2
D1
D2
4
D
1
D2
4
Example 5.4: three pipes of diameters 300, 200 and 400 mms and length of 450m,
255mm, and 315 m respectively are connected in series. and the difference in water
surface levels in two tanks is 18m. Determine the rate of flow of water if coefficients of
friction are 0.0075, 0.0078 and 0.0072 respectively considering:
i.
Minor losses also and
ii.
Neglecting Minor losses
Solution: pipe 1:
=450 m
=300mm=0.3 m
=255m
=315 mm
=200mm=0.2 m
=400 mm=0.4
=0.0075
=0.0078
=0.0072
Arba Minch University WTI Leacture Notes Prepared Otoma 175
Hydraulics I and Hydraulics II Notes
Considering Minor losses: let V1, V2 and V3 be the velocity 1st,
2nd and 3rd pipes respectively. From continuity consideration, we have
i.
=
=
=
=
*
=
*
=
*
=
and
=
=
*
=
*
=
*
=0.5625
We know that hf
=
+
18=
+
+
+
+
+
+
+
+
+
18=
+
+(0.5+45+2.53+201.4+2.847+7.176+0.316)
= 259.77
V1=
+
or
=1.116 m/s
5.3.2 Equivalent pipes
Series pipes can be solved by the method of equivalent lengths. Two pipe systems are
said to be equivalent when the same head loss produces the same discharge in both
systems. From Equation (5.7)
2
hf 1 f 1
L 1 8Q1
for a second pipe hf2 =
5
D1 2 g
f 2 L 2 8Q 2 2
5
D2 2 g
For two pipes to be equivalent,
hf1 = hf2, Q1 = Q2
f L
f L
1 5 1 2 52
D1
D2
Arba Minch University WTI Leacture Notes Prepared Otoma 176
Hydraulics I and Hydraulics II Notes
L 2 L1
f1
f2
D2
D
1
5
……………………………..(5.24)
Activity 5.5.1: What is an equivalent pipe?
5.3.4 Pipes in Parallel
A combination of two or more pipes connected as in figure 5.13 so that the flow is
divided among the pipes and then is joined again, is a parallel – pipe system. In series
pipe system the same fluid flows through all the pipes and the head losses are cumulative,
but in parallel pipe – system the head losses are the same in each of the lines the
discharge are cumulative.
Fig 5.13 Parallel Pipes system
P
P
hf1 = hf2 = hf3 = A Z A B Z B
Q = Q1 + Q2 + Q3
Two types of problems occur:
1) If the head loss b/n A & B is given, Q is determined.
2) If the total flow Q is given, then the head loss & distribution of flow are
determined.
Size of pipes, properties, and roughness are assumed to be known. Since this type of
problem is more complex, as neither the head loss nor the discharge for any one pipe is
known. The procedure is:
Arba Minch University WTI Leacture Notes Prepared Otoma 177
Hydraulics I and Hydraulics II Notes
1)
2)
3)
4)
Assume discharge Q’1 through pipe 1,
Solve for h’f1, using assumed discharge,
Using h’f1, find Q’2 & Q’3
With the three discharges for a common head loss, now assume that the given Q
is split up among the pipes in the same proportion as Q’1, Q’2 & Q’3, Thus,
Q1 =
Q1 '
Q,
Q'
Q2
Q2'
Q,
Q'
Q3
Q3'
Q
Q'
5) Check the correctness of these discharges by computing hf1, hf2, & hf3 for the
computed Q1 , Q2 & Q3
→ Q –Q1 – Q2 – Q3 = 0
Activity 5.5.2: what are the differences between pipes in series and pipes in parallel?
5.4 Branching pipes
Let us consider three pipes connected to three reservoirs as in fig. below & connected
together or branching at the common junction point J. We shall assume that all the pipes
are sufficiently long that minor losses & velocity heads may be neglected. The continuity
& energy eqn. require that the flow entering the junction equal the flow leaving it& that
the pressure head at J (with open piezometer tube water at elevation P) be common to all
pipes.
There being no pumps, the elevation of p must lay b/n the surfaces of reservoirs A& C. If
p is level with the surface of reservoir B then water must flow in to B & Q1 = Q2 + Q3
If P is below the surface of reservoir B then the flow must be out of B & Q1 +Q2 = Q3
Arba Minch University WTI Leacture Notes Prepared Otoma 178
Hydraulics I and Hydraulics II Notes
Fig 5.14 Three interconnected reservoirs
Therefore, for the situation of the above figure, we have the following governing
conditions:
1) Q1 = Q2 + Q3 or Q1 + Q2 = Q3
2) Elevation of p is common to all.
a. Length, diameter, & friction factors are required.
b. The flow is steady & minor losses neglected
c. Three basic equations to solve these problems are:i. Continuity equations
ii. Bernoulli’s equation
iii. Darcy- Weisbach equation
Total rate of in flow at junction = total rate of out flow (continuity equation)
Pipe 1
Pipe 2
D1, L1, V1, Q1 hf1
Elevation, Z1, Reserv, A
Junction of elevation
pj
Zj, pressure head
Pipe 3
D2, L2, V2, Q2, hf2
Z2, Reserv, B
pj
+ Zj
Applying Bernoulli’s eqn b/n the junction point & each of reservoirs,
pj
if
+ Zj > Z2 & Z3
Z1 = (
pj
= total head at junction =
D3, L3, V3, Q3, hf3
Z3, Reserv. C
+ Zj) + hf1
- - - - - - - - -- -- -----------------
(*)
(1)
=>
Z2 + hf2 = (
Z3 + hf3 = (
pj
pj
+ Zj ) -------------------------- (**)
(2)
+ Zj) --------------------------- (***)
(3)
Arba Minch University WTI Leacture Notes Prepared Otoma 179
Hydraulics I and Hydraulics II Notes
=>
If the head of reservoir A is greater than head at junction, the flow is in to the
junction from A & out of the junction to B&C
=> Q1 = Q2 + Q3 -------------------------- *
(4)
2
2
D1 V1 =
D 2 V2 +
D32 V3 ------------- (5)
4
4
4
=> D12 V1 = D22 V2 + D32 V3 ---------------------- (6)
There are three types of problem fouling of branching pipes :Case 1: Given all pipes data (L, D, f, Z1, Z2 & Q1), find Z3, Q2 & Q3?
2
=> Solution: first hf 1 can be calculated directly (hf1 = f1
Then (
L1 v1
)
D1 2 g
pj
+ Zj ) piezometric head at junction can be determine
From eqn ( 2 ) hf2 & Q2 can be determined
Q3 can be detrained from eqn (4) continuity eqn
Then from eqn (3) hf3 and finally Z3 can be determined
Case 2: Given a pipe data, the surface elevation of two reservoirs (A& C) and the flow
the second pipe, Q2, find Z2 and Q1, Q3?
From eqn (1) & iii) (hf1 + hf3) = (Z1 - Z3) (hf1 + hf3) is known & (Q1 - Q3) or (Q3 –
Q1) is known.
Assume trail values of hf1 & hf3 & from these compute the discharge Q1 + Q3 &
compare with (Q1 - Q3)
Repeat the procedure until the two values are equal.
From then, piezometric head at junction can be determined
pj
From hf2 & (
+ Zj) Z2 can be determined.
Case:3 Given a pipe lengths , diameters, and the elevation of all the three reservoirs , find
Q1 Q2, Q3,
In this case, the direction of the flow is not known clearly.
Assume the elevation of B (Z2) is equal to the piezometric head (Zp) & (i.e. no flow into
and out of pipe 2)
From Zp the head losses hf1 & hf3 determined, and then Q1 & Q3 can be obtained
Arba Minch University WTI Leacture Notes Prepared Otoma 180
Hydraulics I and Hydraulics II Notes
If Q1 > Q3, then Zp must be increased to satisfy continuity eqn at J, causing water to
flow into reservoir B, and we will have Q1= Q2 + Q3
If Q1<Q3, then Zp must be lowered, causing water to flow out of reservoir B, & we
will have Q1 + Q2 = Q3
Activity 5.6: Discuss on the three types (cases) of problem falling of branching pipes.
Example 5.5: (flow through the branched pipes):the water level in the two reservoir
A and B are 104.5m and 100m respectively above the datum. A pipe joints each to a
common points D, where a pressure is 98.1KN/m2 gauge and height is 83.5 m above
the datum. Another pipe connects D to another tank C. what will be the height of
water level in C assuming the same value diameters of the pipes AD, BD and CD are
300 mm, 450 mm 600 mm respectively and their length are 240m, 270m, 300m
respectively
Solution: for pipe AD:
=300mm=0.3m,
For pipe BD:
=450 mm=0.45m
For pipe CD :
=600mm= 0.6 m
Friction coefficient for each pipe, f=0.0075
Pressure at D,
Pressure head at D=
=240m
= 270
= 300m
= 93.1 KN/m2 height of water level in tank C: the
=
=10 mm of water
Therefore, the piezometer head at D=83.5+10=93.5m
Figure hear------------------------------------------------------------------------------Head loss between A and D =104.5-93.5=11 m
Head loss between B and D = 100-93.5=6.5 m
Using Darcy Weisbach formulae equation we get
For pipe AD: 11=
Or
=
=
=3m/s
For pipe:BD: 6.5=
=
=
or
= 2.66m/s
From continuity terms, we get
Arba Minch University WTI Leacture Notes Prepared Otoma 181
Hydraulics I and Hydraulics II Notes
+
Or
=
= *
= *
*
+ *
*3+ *
*
*2.66=0.635m3/s
Therefore velocity of pipe CD,
Head loss in pipe CD=
=
=
=
=2.24 m/s
=3.84 m
Therefore water level in tank C= 93.5-3.84=89.66 m ( Ans)
5.7 Pipe Networks
A group of interconnected pipes forming several loops or circuits as shown in fig 5.15 is
called a network of pipes. Such network of pipes is commonly used for municipal water
distribution systems in cities. The main problem in pipe network is to determine the
distribution of flow through the various pipes of the network such that all the conditions
of flow are satisfied and all the circuits are then balanced.
Fig 5.15 Pipe Network
The following conditions of basic relation of continuity and energy should be satisfied in
network of pipes:
1) The flow in to any junction must equal the flow out of it (continuity principle).
2) In any loop, the loss of head due to flow in clockwise direction must be equal to
the loss of head due to flow in anticlockwise direction. (∑hf = 0)
3) The Darcy-Weisbach eqn of pipe-friction laws must be satisfied, (i.e. proper
relation b/n the head loss and discharge must be maintained for each pipe). Minor
losses may be neglected if the pipe lengths are large. However, if the minor losses
are large, they may be taken into account by considering them in terms of the
Arba Minch University WTI Leacture Notes Prepared Otoma 182
Hydraulics I and Hydraulics II Notes
head loss due to friction in equivalent pipe lengths. According to Darcy-Weisbach
eqn the loss of head hf through any pipe discharging at the rate Q can be
expressed as:
h f rQ n
Where r is proportionality factor, which can be determined for each pipe knowing the
friction factors f, the length L and the diameter D of the pipe.
fL
fL
, and n is an exponent having a
r
2
5
2 g ( / 4) D
12.1D 5
numerical value ranging from 1.72 to 2.
The pipe network problems are in general complicated and can’t be solved analytically.
As such, methods of successive approximations are used.
The Hardy-Cross Method is one of the commonly used methods that is used for solving
flows in a pipe network.
Steps:
1. Assume a most suitable distribution of flow that satisfies continuity equation at
each junction.
2. With the assumed values of Q, compute the head losses for each pipe using
h f rQ n equation.
3. Consider different loops and compute the net head loss around each circuit
considering the head loss in clockwise flows as positive and in anti-clockwise
flows as negative. For a correct distribution of flow, the net head loss around each
loop should be equal to zero, so that the circuit will be balanced. However, in
most of the cases, for the assumed distribution of flow the head loss around the
circuit will not be equal to zero. The assumed flows are then corrected by
introducing a correction Q for the flows, until the circuit is balanced. The value
of the correction Q to be applied to the assumed flows of the circuit may be
obtained as follows:
For any pipe if Q0 is the assumed discharge and Q is the correct discharge, then,
Q = Q0 + Q
and the head loss for the pipe is
h f rQ n r (Qo Q) n
Thus, for a complete circuit,
h
rQ n r (Qo Q) n 0
f
By expanding the terms in the brackets by binomial theorem
rQ
n
r[(Qo nQo
n
n 1
Q .....] 0
Arba Minch University WTI Leacture Notes Prepared Otoma 183
Hydraulics I and Hydraulics II Notes
For small Q compared with Q0, all the series after the second can be dropped.
Therefore,
rQ
rQ
n
0
rQo rnQo
n
Q
n 1
Q rn Q
n 1
n 1
Q 0
0
For each loop, solve for Q in the networks as:
Q
rQ0 Q0
rn Q
0
n 1
n 1
rQ0n
rn Q
n 1
0
hf
nhf
Q0
This is the correction to the assumed discharge (Q0).
4. Corrections are now applied to each pipe & to all loopy. For pipes common to
two loops or circuits, a correction from both the loops will be required to be
applied. Clockwise direction is considered as positive & anticlockwise as
negative direction.
5. With the corrected flows in all the pipes, a second trial calculation is made for all
the loops and process is repeated until the corrections Q become negligible.
Activity 5.7: what are the conditions that must be satisfied in pipe net work?
Exercises
1) The following figure shows three reservoirs connected by pipes. Each pipe is 300 mm
in diameter and 1500 m long. Assuming coefficient of friction for f=0.01. Find the
discharge in each pipe,
Solution: Diameter in each pipe,
=
=
= 300 mm=0.3 m length of each pipe,
= = = 1500 m coefficient of friction for each pipe, f=0.01
Discharge in each pipe:
To find over the direction of flow in pipe 2, let us assume that no flow occurs in pipe
2.that is, the piezometric level is 30m.
Therefore, head loss in pipe 1, hf=70m- 30m= 40m
Arba Minch University WTI Leacture Notes Prepared Otoma 184
Hydraulics I and Hydraulics II Notes
Figure : Branching Pipes
Also hf=
40=
=
= 3.924
= 1.921 m/s
Or Discharge through the pipe 1,
= П/4*
* 1.981=
Again, head loss in pipe 3,
But
=П/4*
* 1.981= 0.14 m3/s
=30-15=15m
=
15=
=
= 1.471
Or =1.213 m/s
Therefore the Discharge through the pipe 3,
= П/4*
=
* 1.213=0.0857 m3/s
Since >
the direction of flow is from J to B.
Considering the flow from reservoir A and to B, we have ( 70-30) =head loss in pipe 1+
head loss in pipe 2
Or
+
=
+
Arba Minch University WTI Leacture Notes Prepared Otoma 185
Hydraulics I and Hydraulics II Notes
40=
+
40=10.2 (
+
=
+
)
=3.92
=
Similarly considering the flow from reservoir A to C, w have
70-15=
+
55=10.2 ( + )
(
+
)=
=5.39
Or =
From continuity consideration, we have
=
+
=
But
=
=
(because
=
=
)
= +
From equation (1), (2) and (3), we have
=
+
By trial and error we get ,
=1.9 m/s
From equation (1) :
From (2) :
Thus,
=0.56 m/s
=
=1.54 m/s
= П/4*
* 1.9=0.134 m3/s (Ans)
= П/4*
* 0.56= 0.0396 m3/s (Ans)
= П/4*
* 1.34 =0.0947 m3/s (Ans)
2) The following figure shows a network in which Q and hf refers to discharges and
pressure drops respectively. subscripts 1,2,3,4 and 5 designate respectively values in a
pipe length AC, BC, CD, DA and AC. Subscripts A, B, C and D designate discharge
entering or leaving the junction points A, B, c and D respectively.
By sticking to the valves given in the figure find the following discharges
and
and pressure drops
,
,
,
,
and give this computed value at their respective
places on a net sketch of the network along with flow directions.
Solution: At junction, ∑Q=0
That is Discharge entering the junction =discharge leaving the junction
At junction D:
=
+
Arba Minch University WTI Leacture Notes Prepared Otoma 186
Hydraulics I and Hydraulics II Notes
100= 40+
=100-40=60
At junction A:
=
+
+
+
+
=
60=20+30+
=60-20-30=10
At junction C:
40+10+
= 30
=30-40-10=-20
At junction B:
+
=
30+20=
=50m3/s
For each elementary circuit, ∑
=0
Circuit A= B
+
=0
60-40-
=0
=20
Circuit A=B
+
+20-120=
Therefore
=100 m
3) Find the discharge in each pipe of the net work shown in the figure (a) the value of the
value of the constant K corresponding to heading to the head loss equation =K are
also shown in the figure.
Solution: for the first trial, the discharge as shown in figure (b) is assumed. The
calculation for the correction ∆Q and the correction discharge are given in the table
below.
It may be noted that if the ∆Q is positive, it is to be added to the assumed flows. Thus a
clock wise flow will increase and a counter clock wise flow decrease in magnitude.
Arba Minch University WTI Leacture Notes Prepared Otoma 187
Hydraulics I and Hydraulics II Notes
1. Trial for the first trial the values given in figure
Pip
Circuit e
K
(1)
(2)
AB
BC
CA
BD
DC
CB
(1)
(2)
Hf=K
(3)
5
3
4
Assume
d
Q0-1
(4)
+6.0
+2.0
-4.0
5*
3*
-4*
(5)
=+180.0
= 12.0
=-64.0
1
2
3
+1.0
-3.0
-2.0
1*
-2*
-3*
=1.0
=-18.0
=-12.0
∑Hf
∑K
∑
2K
(6)
(7)
2*5*6.0=60.0
2*3*2.0=12.0
2*4*4=32
(8)
+128
-29.0
2*1.0*1.0=2.0
2*2*3.0=12.0
2*3*2.0=26.0
104
26.0
∆Q0= Correc
(6)/(8 ted Q
)
(9)
(10)
+4.77
-1.23 -0.34
_5.23
+1.11
Corrected Discharge for AB=6.0-1.23=+4.77
Corrected Discharge for BC=2.0-1.23- (+1.11)=-0.34
Corrected Discharge for CA= -4.00-1.23=5.23
Arba Minch University WTI Leacture Notes Prepared Otoma 188
+2.11
-1.89
+0.34
Hydraulics I and Hydraulics II Notes
(b)
(a)
Figure 2
(C)
\2nd Trial for the second trial the values given in fig 2 © are assumed and the process is
repeated.
Pip K Assume Hf=K
∑Hf ∑ K
∑
Circui e
d
2K
t
Q0-1
(1)
(2) (3) (4)
(5)
(6)
(7)
(8)
AB 5
+4.77
2*5*4.77=47.7
5*
=+113.7
(1)
BC 3
-0.34
+4
2*3*0.34=2.04
91.58
6
CA 4
-5.23
2*4*5.23=41.84
3*
= -12.0
-4*
=109.41
BD 1
+2.11
2*1.0*2.11=4.22
1*
=4.45
(2)
DC 2
-1.89
2*2*1.89=7.56
1.82
-2*
=-7.14
CB 3
=0.34
-3*
=-+0.34 2.34 2*3*0.34=2.04
∆Q0 Correc
=(6)/( ted Q
8)
(9)
(10)
+4.73
-0.04 -0.55
-5.27
+2.28
+0.17 -1.72
+0.55
Arba Minch University WTI Leacture Notes Prepared Otoma 189
Hydraulics I and Hydraulics II Notes
3rdTrial the values given in figure 2 (D)
Pip K Assume Hf=K
Circui e
d
t
Q0-1
(1)
(2) (3) (4)
(5)
AB 5
+4.73
5*
=+111.8
(1)
BC 3
-0.55
6
CA 4
-5.27
3*
= -0.91
-4*
=111.09
BD 1
+2.28
1*
=+5.20
(2)
DC 2
-1.72
-2*
=-5.92
CB 3
+0.55
-3*
=-+0.91
∑Hf
∑K
∑
2K
(6)
(8)
0.14
(7)
2*5*4.73=47.30
2*3*0.55=3.30
2*4*5.27=42.16
+0.1
9
2*1.0*2.11=4.56
2*2*1.89=6.88
2*3*0.34=3.30
91.76
14.74
∆Q0 Correc
=(6)/( ted Q
8)
(9)
(10)
+4.71
-0.02 -0.56
-5.29
+2.27
+0.01 -1.73
+0.56
CHAPTER 6
HYDRAULIC MACHINES
Introduction
The function of a hydraulic machine is to effect an exchange of energy between a
mechanical and a fluid system. In civil engineering the only classes of hydraulic machine
with which we are directly concerned are pumps & turbines.
Pumps are a means of adding energy to water. They convert mechanical energy (imparted
by rotation) in to water (hydraulic) energy used in lifting water to higher elevations. The
mechanical energy is provided by an electric motor.
Turbines are a means of taking energy out of water. They convert water (hydraulic)
energy in to mechanical energy (shaft power). The shaft power developed is used in
running an electric generator directly coupled to the shaft of the turbine, thus producing
electrical power.
6.1 Pump Types
There are two main categories of pumps:
i. Positive displacement pumps
ii. Rota-dynamic pumps
6.1.1 Positive displacement pumps
Positive displacement pumps usually deliver only small discharges irrespective of the
head pumped against. Typical examples of this type of pumps include:
a) Reciprocating pump
b) Rotary pump
Arba Minch University WTI Leacture Notes Prepared Otoma 190
Hydraulics I and Hydraulics II Notes
6.1.1.1 Reciprocating pump
This type of pump is often used for domestic water supplies in developing countries for
lifting ground water. In its usual form it consists of a ram, piston, and valve arrangement.
The piston moves up & down in a cylinder (see figure 5.1). When the lever is pushed
downwards the piston rises, lifting water above it through the outlet. At the same time it
sucks water up the well through the non-return valve & fills the cylinder. When the lever
is raised the non-return valve close & the piston descends allowing water to flow through
another valve in to the upper part of the cylinder. The process is then repeated.
Fig. 5.1
Reciprocating pump
6.1.1.2 Rotary Pump
Rotary pump contains two gears or rotors, which mesh together as they rotate in
opposite directions (see fig. 5.2). Pressure is generated by the intermeshing gears,
which operate with minimum clearance. Water becomes trapped between the gears
and forced in to the delivery pipe.
This form of pump is eminently suited to handling small discharges (<30 l/s) and viscous
liquids.
Fig. 5.2
Rotary Pump
Activity 1:- Differentiate between reciprocating pumps and rotary pumps and
Classify further?
Arba Minch University WTI Leacture Notes Prepared Otoma 191
Hydraulics I and Hydraulics II Notes
6.1.2 Rota-dynamic Pumps
Rota-dynamic pumps rely on rotational movement for their pumping action. A rotating
element, known as impeller, imparts velocity to a liquid and generates pressure. An outer
fixed casing, shaft, & diving motor complete the pump unit.
Rota-dynamic pumps are the most widely used types of pumps in civil Engineering. Its
field of employment ranges from public water supply, drainage, & irrigation to the very
special requirements of suction dredging & the transport of concrete or sludge.
There are three main categories of Rota-dynamic pumps based on the way water flows
through them:
a) Centrifugal (radial flow) pumps
b) Axial flow pumps
c) Mixed them pumps
6.1.2.1 Centrifugal pumps
Centrifugal pumps are the most widely used of all the Rota-dynamic pumps. They are
named because of the fact that the pressure head created is largely attributable to
centrifugal action. They may be designed to handle up to a head of 120m.
Water is drawn in to the pump from a source of supply through a short length of pipe
called the suction (see fig. 5.3). Water enters at the center or eye of the impeller, is picked
up by the vanes, and forced outwards in a radial direction. The water is collected by the
pump casing & guided towards the outlet called the delivery.
Fig. 5.3 Centrifugal pump
In order that energy shall, not be wasted and efficiency there by lowered, it is essential to
convert as much as possible of the considerable velocity head at exit from the impeller in
to useful pressure head. Normally, this is achieved by shaping the outer casing in spiral
Arba Minch University WTI Leacture Notes Prepared Otoma 192
Hydraulics I and Hydraulics II Notes
form so that the sectional area of flow around the periphery of the impeller is gradually
expanded.
Activity 2:- What are the purposes of casing in centrifugal pumps?
How can increase its efficiency?
6.1.2.2 Axial flow pumps
This type of pump is well suited to situations where a large discharge is required to be
delivered against a low head. The maximum operating head is between 9 and 12m.
Axial flow pumps consist of a propeller housed inside a tube that acts as a discharge pipe
(see fig 6.4). The power unit turns the propeller by means of a long shaft running down
the middle of the pipe & this lifts the water up the pipe.
Fig. 5.4 Axial flow pump
Water enters axially and the impeller imparts a rotational component, the actual path
followed by a particle being that of a helix on a cylinder. Head is developed by the
propelling action of the vanes, centrifugal effects playing no part.
Activity 3:- Explain the effect of number of impeller-vanes on head developed by a
Centrifugal pump and define the vane effectiveness factor.
6.1.2.3 Mixed flow pumps
Mixed flow pumps occupy an intermediate position between the centrifugal & axial flow
types and so combine the best features of both pump types. Flow is part radial & part
axial, the impeller being shaped accordingly. The path traced by a fluid particle is that of
a helix on a cone. The head range is up to about 25m.
Arba Minch University WTI Leacture Notes Prepared Otoma 193
Hydraulics I and Hydraulics II Notes
Mixed flow pumps are efficient at pumping larger quantities of water than centrifugal
pumps and are more efficient at pumping to higher pressures than axial flow pumps.
6.2 Turbine types
The possible combination of head and discharge at hydroelectric sites is extremely varied
and is reflected in a corresponding diversity of turbine design. There are two main
categories of turbine:
Impulse turbines
Reaction turbines
6.2.1 Impulse turbines
An impulse turbine is one in which the pressure energy of the water is converted to
velocity energy before it impinges on a rotational element over a limited portion only of
the periphery, there being no subsequent change in pressure. Impulse machines today are
of the Pelton wheel turbines, also called tangential flow turbines, and are suitable for high
heads in excess of 300m.
A typical Pelton turbine arrangement is shown in fig 5.5. The nozzle discharges in to the
atmosphere a high velocity jet which impinges on a series of buckets mounted on the
periphery of a wheel, also called runner. The torque exerted by the impact and deviation
of the jet causes the wheel to rotate. Its energy usefully expended, water leaves the
buckets at a relatively low velocity and is directed towards the discharge channel.
Fig5.5 Pelton turbine
The turbine must be set a sufficient height above the maximum tail water level if free
discharge is to be ensured.
6.2.2 Reaction turbines
In a reaction turbine, the initial pressure-velocity conversion is only partial, so
that water enters the rotating element throughout the entire periphery and all the
flow passages run full. Modern reaction turbines are of two types: Francis &
Propeller (Kaplan), catering for medium and low heads respectively.
6.2.2.1 Francis turbines
Francis turbines are like a centrifugal pump in reverse (see fig 5.6). The runners were
shaped like a centrifugal impeller, flow being predominantly radial with the radii at entry
and exit the same for all flow paths.
Arba Minch University WTI Leacture Notes Prepared Otoma 194
Hydraulics I and Hydraulics II Notes
Water is directed in to the runner by means of a spiral casing and a number of aerofoilshaped blades, called guide blades, spaced evenly around the periphery. These guide
blades are adjustable; the amount of opening being controlled by the turbine governor.
The role of the guide blades is to guide the flow in to the runner with the minimum
amount of turbulence, as well as to regulate the discharge and hence power output.
Fig. 5.6
Francis turbine
The head range for Francis turbine is from 30 m to about 450 m. As this is the most
common head available, this type of turbine enjoys a great numerical superiority over
other types.
The velocity head at discharge from the runner may amount to 20 %, or more, of the
available head and as with centrifugal pumps it is clearly important to convert as much as
possible of this otherwise wasted energy to useful pressure head. This can be
accomplished by means of an expanding passage, called a draft tube, which finally
discharges the water at a relatively low velocity to the tail water.
6.2.2.2 Kaplan turbines
Kaplan turbines are like axial flow pumps in reverse (see fig 5.7). They operate at low
heads, usually less than 60 m, and high discharges.
They have blades on their runners that can be twisted to different angles in order to work
at high efficiency over a wide range of operating conditions.
Fig. 5.7 Kaplan turbine
Arba Minch University WTI Leacture Notes Prepared Otoma 195
Hydraulics I and Hydraulics II Notes
Activity 4:- Distigush between impulse and reaction turbines and give examples for each
type and describe thier functions.
6.3 Head on pumps and turbines
6.3.1 Head on pumps
The total head on a pump is the excess of the outlet head over the inlet head. Each of
these heads may be regarded as being composed of elevation head, pressure head, and
velocity head.
Referring to fig 5.8, the total head on a pump may be expressed by:
H H s H d H Ls H Ld
1
Where, Hs & Hd are the static suction and delivery lifts respectively, and HLs & HLd are
the energy head losses (friction + minor) in suction and delivery branches, respectively. If
the pump is situated below the level of the water surface in the suction well, Hs is
negative.
Fig. 5.8 Head on
a pump
6.3.2 Head on turbines
The net head on a turbine is the head available for doing work, that is to say, the
difference between the total head (elevation + pressure + velocity head) at inlet and
outlet.
Referring to fig 5.9, the net head on a reaction turbine situated at some distance from the
intake is given by:
H HG H L
.2
Arba Minch University WTI Leacture Notes Prepared Otoma 196
Hydraulics I and Hydraulics II Notes
Where, HG is the gross head (intake surface level to tail water level) and HL is the energy
head loss in the supply pipeline.
Fig. 5.9 Head on a reaction turbine
The same expression is applicable to impulse turbines. However, as these machines
operate under atmospheric pressure, HG is measured to an appropriate jet level.
6.4 Specific Speed
It is useful to have a common basis on which different types of pump or turbine design
can be compared in respective of size. The parameter known as specific speed has been
introduced for this purpose, and the respective definitions could be as follows:
The specific speed of a pump is the speed in rev/min of a geometrically similar pump of
such a size that it delivers 1 m3/s against 1 m head. It is expressed by:
ns
nQ1/ 2
H 3/ 4
3
Where, ns is specific speed (rev/min), n is speed of rotation (rev/min), and Q & H are
discharge (m3/s) and head (m) respectively.
The specific speed of a turbine is the speed in rev/min of a geometrically similar turbine
of such a size that it produces 1 kW under 1 m head. It is expressed by:
ns
nP 1 / 2
H 5/ 4
4
Where, P is the power output in kw.
The above definitions of the specific speed have recognized the significant performance
parameters. In the case of pumps it is the discharge that is important, while for turbines it
is the power output.
Arba Minch University WTI Leacture Notes Prepared Otoma 197
Hydraulics I and Hydraulics II Notes
The values of n, Q, H, & P in the expressions for the specific speed are those for normal
operating condition (the design point), which would generally coincide with the optimum
efficiency.
It can be noted that the specific speed is independent of the dimensions and therefore
relates to shape rather than size. Thus, all pumps or turbines of the same shape have the
same specific speed.
The valve of specific speed is mainly used for selection of a suitable type of pump or
turbine for a particular site. The following table gives guidelines on this purpose.
Table: Specific speeds for different types of pumps and turbines.
Turbines
Pumps
Machine type
ns (rpm)
Centrifugal
10 – 80
Mixed flow
70 – 180
Axial flow
150 – 320
Pelton
10 – 40
Francis
35 – 400
Kaplan
300 – 1000
Comments
High head – small discharge
Medium head
discharge
-
medium
Low head – large discharge
High head – small discharge
Medium head
discharge
-
medium
Low head – large discharge
6.5 Performance
Activity 5:- Explain the term “specific speed” and its uses as applied to both the pump and
the turbine?
6.5.1 Losses & efficiencies
The overall efficiency η of a pump or turbine is the ratio of the useful power output to the
power input or available. Thus,
For pumps;
QH
(6.5)
Pi
For turbines;
P
(6.6)
QH
Where, Pi is the power input to a pump and P the corresponding output from a
turbine.
Arba Minch University WTI Leacture Notes Prepared Otoma 198
Hydraulics I and Hydraulics II Notes
Pump efficiencies are usually of the order of 80 %, whereas turbine efficiencies are rarely
less than 90 %, the difference being largely accounted for by the generally greater size of
turbines and the more efficient flow passages.
The energy losses that occur within a pump or turbine are attributable to volumetric,
mechanical, and hydraulic losses.
The volumetric loss arises from the slight leakage (from the high pressure side to
the low pressure side) in the small clearances that must be provided between the
rotating element and the casing. Thus, the impeller passages of a pump are handling
more water than is actually delivered, while the runner passages of a turbine are
handling less than is available.
The mechanical loss is a result of power loss due to mechanical friction at bearings
and fluid shear in the clearances.
The hydraulic loss arises from head loss in the flow passages due to friction and
eddies.
Activity 6:- Explain the energy losses that occur within pump and turbine.
6.5.2 Characteristics
6.5.2.1 Pump characteristics
As the discharge is nearly the primary factor, it is customary for the performance curves
to consist of the three curves of head, power input, and efficiency, drawn to common
baseline of discharge.
Each design of pump has its own characteristic behavior. Figure5.10 shows the
performance curves for the centrifugal and axial flow pumps. The curves are drawn for a
particular operating speed.
Arba Minch University WTI Leacture Notes Prepared Otoma 199
Hydraulics I and Hydraulics II Notes
Fig. 5.10
Pump characteristics
6.5.2.2 Turbine characteristics
Arba Minch University WTI Leacture Notes Prepared Otoma 200
Hydraulics I and Hydraulics II Notes
As turbine output must be varied to suit the electrical demand it is customary to design
the machine so that optimum efficiency occurs at about three-quarters of full load.
Efficiency and power output are usually plotted against speed for a constant head.
Figure 5.11 shows typical performance curves for a Pelton turbine, while figure 5.12
shows the corresponding curves for Francis turbine.
Fig 5.11
Performance curves for a Pelton turbine
Arba Minch University WTI Leacture Notes Prepared Otoma 201
Hydraulics I and Hydraulics II Notes
Fig. 5.12
Performance curves for a Francis turbine
Activity 7:- Show the main performance characteristics of pump and turbine with a sketch?
Describe efficiency characteristics curves are obtained.
6.6 Cavitation’s
Cavitation occurs in both pumps and turbines. The primary cause of cavitation’s’ is a low
pressure and this usually be brought about by a high local velocity. Cavitation is a
harmful phenomenon and influences the design of the machines. It also imposes severe
limitations on the machine setting, that is to say the permissible suction lift in the case of
pumps and the height above the tail water in the case of turbines.
With pumps, the most vulnerable points for attack are the impeller vane tips at discharge.
It is a result of high water velocities (low pressure) created near entry.
Here, vapor bubbles or cavities tend to form (see figure 5.13) which are then carried
forward by the flow to a region of higher pressure near the exit where they collapse
violently, causing pitting and severe damage to the impeller blades.
If Ps represents the pressure at inlet then (
) is the absolute head at the pump inlet
above the vapor pressure Pv and is known as the net positive suction head, NPSH.
Arba Minch University WTI Leacture Notes Prepared Otoma 202
Hydraulics I and Hydraulics II Notes
Thu NPSH = (
)=
- Hs -
Where Pa = atmospheric pressure
Hs = manometric suction head = hs + hls +
Where hs = suction lift; hls = total head loss in suction pipe
Vs = velocity head in suction pipe
𝛒 = density of liquid/water
Fig. 5.13 Head conditions in suction pipe
Tahoma introduced a cavitation number (σ =
) and from physical tests found this to be
strongly related to specific speed.
Fig. 5.14 Cavitation in a pump impeller
Cavitation also occurs in turbine runners in a similar manner. High velocities at the
turbine inlet produce cavities which then collapse close to the runner blades near the exit.
Apart from the physical damage caused by cavitation, the reduction of the effective
volume of the flow passages due to the presence of water vapor results in a smaller
discharge and a sharp drop in efficiency. Additional evidence is the noise and vibration
produced by the collapse of the vapor bubbles.
Activity 8:- Mention some of the recommendations to follow for preventing cavitation in both
pump and turbine.
Solved problems
Example 1
Arba Minch University WTI Leacture Notes Prepared Otoma 203
Hydraulics I and Hydraulics II Notes
A centrifugal pump has a 100 mm diameter suction pipe and a 75 mm diameter delivery
pipe. When discharging 15 l/s of water, the inlet water mercury manometer with one limb
exposed to the atmosphere recorded a vacuum deflection of 198mm; the mercury level on
the suction side was 100 mm below the pipe centerline. The delivery pressure gauge, 200
mm above the pump inlet, recorded a pressure of 0.95 bars. The measured input power
was 3.2 kW. Calculate the pump efficiency.
Solution
Manometric head = rise in total head
Hm =
+z–(
+
+
)
1 bar = 10.198 m of water
= 0.5 x 10.198 m = 9.69 m of water
= - 0.1- 0.198 x 13.6 = -2.793 m water
V2 = 3.39 m/s
= 0.588 m
V1 = 1.91 m/s
= 0.186 m
Then Hm = 9.69 m + 0.588 m +0.2 m – (-2.793 m + 0.186 m)
Hm = 13.09 m
Efficiency (ŋ) =
ŋ=
=
= 60.2 %
Example 2
Tests on a physical model pump indicated a cavitation number of 0.12. A homologous
(geometrical and dynamically similar) unit is to be installed where the atmospheric
pressure is 950 mb, and the vapour pressure head 0.2 m. The pump will be situated above
the suction well, the suction pipe being 200 mm in diameter, of uPVC, 10 m long; it is
vertical with a 90° elbow leading into the pump inlet and is fitted with a foot-valve. The
Arba Minch University WTI Leacture Notes Prepared Otoma 204
Hydraulics I and Hydraulics II Notes
foot valve head loss hv = 4.5
; bend loss hb = 1.0
. The total head at the operating
discharge of 35 l/s is 25 m. calculate the maximum permissible suction head and suction
lift.
Solution
Pa = 950 mb = 0.95 x 10.198 = 9.688 m of water
=9.688 – 0.2 = 9.488 m of water
= σHm = 0.12 x 25 = 3.0 m
Hs = (9.488 – 3.0) = 6.488 m →Max. Permissible suction head
Vs = 1.11 m/s
= 0.063 m →loss in suction pipe
But Re = 1.96 x 105
k = 0.03 mm (uPVC)
= 0.001 when λ = 0.0167
hfs = 0.0530 m
hv = 4.5 x 0.063 m =0.283 m
hb = 0.063 m
hls = 0.4 m
hs = Hs - hls hs = 6.488 – 0.4 – 0.063
hs = 6.025 m
Example 3
A laboratory test on a pump revealed that the onset of cavitation occurred, at a discharge
of 35 l/s, when the total head at inlet was reduced to 2.5 m and the total across the pump
was 32 m. Barometric pressure was 760 mm Hg and the vapour pressure 17 mm Hg.
Calculate the Tahoma cavitation number. The pump is to be installed in a situation where
the atmospheric pressure is 650 mm Hg and water temperature 10°C (vapour pressure
9.22 mmHg) to give the same total head and discharge. The losses and velocity head in
the suction pipe are estimated to be 0.55 m of water. What is the maximum height of the
suction lift?
Solution
NPSH = (
– Hs) -
; where Hs = manometric suction head.
Arba Minch University WTI Leacture Notes Prepared Otoma 205
Hydraulics I and Hydraulics II Notes
= 10.3 m of water
= 0.23 m of water
– Hs = 2.5 m
NPSH = 2.5 m - 0.23 m = 2.27 m
Cavitation number, σ =
σ=
= 0.071 m
Installed condition;
= 8.84 m;
Then, NPSH =
= 0.1254 m (at 10° C)
– Hs –
2.27 = 10.3 – Hs – 0.23
Hence, Hs = 6.44 m
But, Hs = hs + hls +
Where, hls +
= 0.55 m
hs = 6.44 – 0.55
hs = 5.89 m suction lift
EXERCISES/PROBLEMS
1. Differentiate b/n positive displacement and Rota-dynamic pumps and classify further the
first group on the basis of types of motion and shapes of the moving part of the pump, the
latter group on the basis of flow direction in the moving part of the pump.
2. Sketch a centrifugal pump installation; explain the function the accessories provided and
define various heads.
3.
Explain the reason for fitting large air vessels on the suction and delivery pipes of a
reciprocating pump close to the cylinder.
4. Not all energy of water given to a turbine is transferred to its shaft. Of the total energy a
certain portion is in the processes. Explain the different losses.
5. List the various factors to be considered in selection of appropriate type of turbines for
hydropower station.
6. A Rota-dynamic pump having the characteristics tabulated below delivers water from a
river at elevation 52 m o.d, to a reservoir with a water level of 85 m o,d., through a 350
Arba Minch University WTI Leacture Notes Prepared Otoma 206
Hydraulics I and Hydraulics II Notes
mm diameter coated cast iron pipeline, 200 m long (k = 0.15 mm). Allowing 10
for
losses in valves, etc. Calculate the discharge in pipeline and the power consumption.
Q (l/s)
0
50
100
150
200
Hm (m)
60
58
52
41
25
Ŋ (%)
---
44
65
64
48
Arba Minch University WTI Leacture Notes Prepared Otoma 207
Hydraulics I and Hydraulics II Notes
Arba Minch University WTI Leacture Notes Prepared Otoma 208