FREQUENCY-DOMAIN ANALYSIS OF
LTI SYSTEMS
Contents:
2
Contents:
3
RECALL :
4
RECALL :
5
RECALL :
𝐴𝑒
𝑗𝜔𝑛
↦ 𝐴𝐻 𝜔 𝑒
𝑗𝜔𝑛
∀𝑛
𝐴𝑐𝑜𝑠 𝜔𝑛 ↦ 𝐴 𝐻 𝜔 𝑐𝑜𝑠 𝜔𝑛 + Θ(𝜔)
𝐴𝑠𝑖𝑛 𝜔𝑛 ↦ 𝐴 𝐻 𝜔 𝑠𝑖𝑛 𝜔𝑛 + Θ(𝜔)
6
Steady-State Response to
Periodic Input Signals
7
Steady-State Response to Periodic Input Signals :
8
Steady-State Response to Periodic Input Signals :
9
Steady-State Response to Periodic Input Signals :
10
Steady-State Response to Periodic Input Signals :
𝑥(𝑛)
𝐻(𝜔)
𝑦(𝑛)
11
Response to Aperiodic Input Signals
12
RECALL :
13
Response to Aperiodic Input Signals :
14
Response to Aperiodic Input Signals :
15
Response to Aperiodic Input Signals :
o By its very nature, a finite-energy aperiodic signal contains a
continuum of frequency components.
o The LTI system, through its frequency response function,
attenuates some frequency components of the input signal and
amplifies other frequency components. Thus the system acts as a
filter to the input signal.
o Observation of the graph of |𝑯(𝝎)| shows which frequency
components are amplified and which are attenuated.
o On the other hand, the angle of 𝑯(𝝎) determines the phase shift
imparted in the continuum of frequency components of the input
signal as a function of frequency.
16
Response to Aperiodic Input Signals :
o If the input signal spectrum is changed by the system in
an undesirable way, we say that the system has caused
magnitude and phase distortion.
o We also observe that the output of an LTI system
cannot contain frequency components that are not
contained in the input signal.
o It takes either a linear time-variant system or a
nonlinear system to create frequency components that
are not necessarily contained in the input signal.
17
Response to Aperiodic Input Signals :
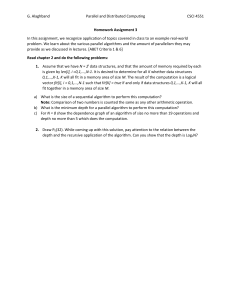
o Figure 5.1.3 illustrates the time-domain and frequency-domain
relationships that can be used in the analysis of BIBO-stable LTI
systems.
o We observe that in time domain analysis, we deal with the
CONVOLUTION of the input signal with the impulse response of
the system to obtain the output sequence of the system.
o On the other hand, in frequency-domain analysis, we deal with the
input signal spectrum 𝑋(𝜔) and the frequency response 𝐻(𝜔) of
the system, which are related through MULTIPLICATION, to
yield the spectrum of the signal at the output of the system.
18
Response to Aperiodic Input Signals :
19
Response to Aperiodic Input Signals :
20
Response to Aperiodic Input Signals :
21
EX. 5.1.5
22
Ex. 5.1.5 :
23
Ex. 5.1.5 :
24
Ex. 5.1.5 :
1
𝐻 𝜔 =
1 − 0.5𝑒 −𝑗𝜔
1
∗
𝐻 𝜔 =
1 − 0.5𝑒 𝑗𝜔
𝐻 𝜔 × 𝐻∗ 𝜔
= 𝐻 𝜔 2
1
1
=
1 − 0.5𝑒 −𝑗𝜔 1 − 0.5𝑒 𝑗𝜔
1
=
1 − 0.5𝑒 −𝑗𝜔 − 0.5𝑒 𝑗𝜔 + 0.25
1
=
5
− cos 𝜔
4
1
𝑋 𝜔 =
1 − 0.25𝑒 −𝑗𝜔
1
∗
𝑋 𝜔 =
1 − 0.25𝑒 𝑗𝜔
𝑋 𝜔 × 𝑋∗ 𝜔
= 𝑋 𝜔 2
1
1
=
1 − 0.25𝑒 −𝑗𝜔 1 − 0.25𝑒 𝑗𝜔
1
=
1 − 0.25𝑒 −𝑗𝜔 − 0.25𝑒 𝑗𝜔 + 0.0625
1
=
17 1
− cos 𝜔
16 2
25
Ex. 5.1.5 :
v
𝑋 𝜔
𝐻 𝜔
2
1
=
17 1
− cos 𝜔
16 2
2
=
1
5
− cos 𝜔
4
26
Frequency Response
of LTI Systems
27
Frequency Response of LTI Systems :
28
Frequency Response of a System
with a Rational System Function
29
Frequency Response of a System with a Rational System Function :
30
Frequency Response of a System with a Rational System Function :
31
Frequency Response of a System with a Rational System Function :
𝟏
(1 − 𝑧𝑘 𝑧 −1 )
1
Replacing 𝑧 with ∗
𝑧
(1 − 𝑧𝑘 𝑧 ∗ )
Now taking conjugation
1 − 𝑧𝑘 𝑧 ∗ ∗ = 1 − 𝑧𝑘∗ 𝑧
Replacing 𝒛 with ∗
𝒛
and taking conjugation
∗
ς𝑀
(1
−
𝑧
𝑘=1
𝑘 𝑧)
𝑏0 𝑁
อ
∗
ς𝑘=1(1 − 𝑝𝑘 𝑧)
=
𝑧=𝑒 𝑗𝜔
∗ 𝑗𝜔
ς𝑀
(1
−
𝑧
𝑘=1
𝑘𝑒 )
𝑏0 𝑁
=
∗
𝑗𝜔
ς𝑘=1(1 − 𝑝𝑘 𝑒 )
Evaluating @ UC
𝐻 ∗ (𝜔)
32
Frequency Response of a System with a Rational System Function :
Replacing 𝒋 with −𝒋
∗
𝐻 (𝜔) =
𝑀
∗
𝑗𝜔
ς𝑘=1(1 − 𝑧𝑘 𝑒 )
𝑏0 𝑁
ς𝑘=1(1 − 𝑝𝑘∗ 𝑒 𝑗𝜔 )
33
Frequency Response of a System with a Rational System Function :
34
Frequency Response of a System with a Rational System Function :
Parseval’s Theorem:
∞
𝜋
𝐸𝑦 = 𝑦(𝑛)
𝑛=−∞
2
1
න 𝑌(𝜔) 2 𝑑𝜔
=
2𝜋 −𝜋
𝜋
1
2
2
න 𝑋(𝜔) 𝐻(𝜔) 𝑑𝜔
=
2𝜋 −𝜋
Hence 𝑯(𝝎) 𝟐 shows how the system transfers ENERGY or
POWER from the input signal to the output signal. To
2
emphasize this interpretation, we often refer to 𝐻(𝜔) as
the (energy or power) GAIN of the system.
35
Frequency Response of a System with a Rational System Function :
For real 𝑥(𝑛):
𝑋 𝑧 = 𝑋 ∗ (𝑧 ∗ )
1
−1
∗
𝑋 𝑧
=𝑋
𝑧∗
36
Frequency Response of a System with a Rational System Function :
37
Frequency Response of a System with a Rational System Function :
38
Frequency Response of a System with a Rational System Function :
39
EX. 5.2.1
40
Ex. 5.2.1 :
𝐻 𝜔
2
: Magnitude squared of 𝐻 𝜔 .
41
Ex. 5.2.1 :
roots([1 0.1 -0.2]).'
=
-0.5000 0.4000
42
Ex. 5.2.1 :
conv([1 1],fliplr([1 1]))
conv([1 0.1 -0.2],fliplr([1 0.1 -0.2]))
ans = 1 2 1
ans = -0.2000 0.0800 1.0500 0.0800 -0.2000
43
Ex. 5.2.1 :
44
Frequency Response of a System with a Rational System Function :
z1 = 5*exp(j*pi/4);
z2 = 5*exp(j*pi/3);
z1*conj(z1)
z2*conj(z2)
ans = 25
ans = 25
45
COMPUTATION of
Frequency Response Function
46
Computation of Frequency Response Function :
47
Computation of Frequency Response Function :
48
Computation of Frequency Response Function :
49
Computation of Frequency Response Function :
Eq. (5.2.17) the Magnitude Response at a
certain freq. 𝜔 is given by the Product of the
lengths of the vectors drawn from the zeros to z =
𝑗𝜔
𝑒
divided by the Product of the lengths of
𝑗𝜔
vectors drawn from the poles to z = 𝑒 .
50
Computation of Frequency Response Function :
51
Computation of Frequency Response Function :
Clearly, if we know the zeros and the poles of the system
function 𝐻(𝑧), we can evaluate the frequency response
from (5.2.17) and (5.2.18).
52
Computation of Frequency Response Function :
53
Computation of Frequency Response Function :
54
Computation of Frequency Response Function :
55
Computation of Frequency Response Function :
56
Computation of Frequency Response Function :
57
Computation of Frequency Response Function :
58
EX. 5.2.2
59
Ex. 5.2.2 :
60
Ex. 5.2.2 :
61
Ex. 5.2.2 :
clearvars; close all; clc; FS = 'FontSize';
p1 = 0.8;
b = [1]; a = [1 -p1];
w = [-pi : 1e-2 : pi];
H = freqz(b,a,?);
% Magnitude Response
H_mag = abs(?);
subplot(211); plot(?,H_mag); grid; hold on;
xlabel('Normalized Freq. (\times \pi Rad / Sample)');
ylabel('Magnitude (dB)');
% Phase Response
H_ph = angle(H);
subplot(212); plot(?,H_ph); grid;
figure; zplane(b,a); grid;
Note that the peak
of the 𝐻(𝜔)|occurs
at 𝜔 = 0, the point
on the UC closest to
the pole located at
0.8.
62
Computation of Frequency Response Function :
63
Pr. 5.35
64
Pr. No. 5.35 :
65
Pr. No. 5.35 :
66
Pr. No. 5.35 :
l = (1-exp(j*3*pi/4));
l2 = l*conj(l)
G = 1/4/l2
l2 =
3.4142
G=
0.0732
67
Pr. No. 5.35 :
A second order system has a double pole at 𝑝1,2 = 0.75 and two zeros at
𝜋
±𝑗 4 .
𝑧 =𝑒
1,2
(i) Compute the frequency response 𝐻(𝜔) of the filter.
(ii) Using geometric arguments, choose the gain 𝐺 of the filter so that
|𝐻(0)| = 1.
(iii) Test your answer by putting the value of 𝐺 in 𝐻(𝜔).
68
Pr. No. 5.35 :
𝑝1,2 = 0.75; 𝑧1,2 = 𝑒
𝜋
±𝑗 4
1 − 𝑧1 𝑧 −1 1 − 𝑧2 𝑧 −1
𝐻 𝑧 =𝐺
1 − 𝑝1 𝑧 −1 1 − 𝑝2 𝑧 −1
=𝐺
𝐻 𝜔 =𝐺
𝜋
𝑗 4 −𝑗𝜔
1−𝑒 𝑒
𝜋
−𝑗 4 −𝑗𝜔
1−𝑒
𝑒
−𝑗𝜔 2
1−0.75𝑒
1−
𝜋
𝑗 4 −1
𝑒 𝑧
𝐻 0 =𝐺
16𝐺 1 − 𝑒
𝑗
𝜋
−𝑗 4 −1
𝑒 𝑧
1−
1 − 0.75𝑧 −1
𝜋
𝑗4
𝜋
−𝑗 4
1−𝑒
1−𝑒
1−0.75 2
𝜋
4
1−𝑒
−𝑗
1
𝐺 =
16 1−𝑒
𝜋
𝑗4
1−𝑒
𝜋
−𝑗 4
𝜋
4
=
2
=
=1
1
9.3726
= 0.1067
69
Pr. No. 5.35 :
70
Pr. No. 5.35 :
𝑉1 = 𝑒
𝑉2 = 𝑒
𝑗
𝜋
4
− 𝑒 𝑗0 = 0.7654
𝜋
−𝑗 4
− 𝑒 𝑗0 = 0.7654
𝑈1 = 0.75 − 𝑒 𝑗0 = 0.25
𝑈2 = 0.75 − 𝑒 𝑗0 = 0.25
𝐻 0
𝑉1 × 𝑉2
=𝐺
= 𝐺 × 9.3726 = 1
𝑈1 × 𝑈2
𝐺 =
1
9.3726
= 0.1067
71
Pr. No. 5.35 :
72
Pr. No. 5.35 :
𝜋
𝑗 −𝑗𝜔
1−𝑒 4 𝑒
𝐻 𝜔 = 𝟎. 𝟏𝟎𝟔𝟕
𝐻 𝜔 = 0.1067
0.1067
𝜋
𝑗
1−𝑒 4
1−0.75𝑒
𝜋
𝑗
1−𝑒 4
1.7071 2 − 2 cos
𝜋
−𝑗
1−𝑒 4
−𝑗0 2
1−0.75𝑒
𝜋
−𝑗
1−𝑒 4
1−0.75
𝜋
−𝑗
1−𝑒 4 𝑒 −𝑗𝜔
−𝑗𝜔 2
2
= 0.1067
=
𝜋
𝑗
1−𝑒 4
𝜋
−𝑗
1−𝑒 4
1−0.75
2
=
𝜋
4
= 1.7071 × 0.5858 = 𝟏. 𝟎𝟎𝟎𝟎
73
§5.4 Linear Time-Invariant Systems as
Frequency-Selective Filters
74
DISCLAIMER
75
These power point slides are NOT
SUBSTITUTE of reading TEXT
BOOK(S).
You’re ALWAYS DIRECTED to
CAREFULLY READ the relevant
book chapter and SOLVE ALL
Examples and End Problems.
76
REFERENCES :
[1] [Manolakis-2011] Applied Digital Signal Processing
77