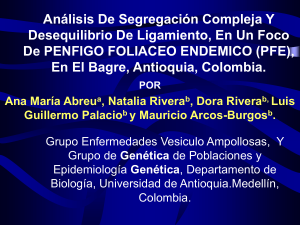
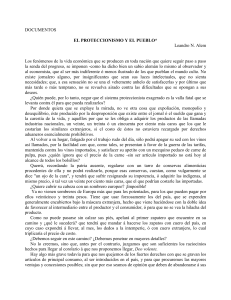
Grado de calidad de la ISO Calidad Calid ad grado G Equil Equ ilibr ibrio io ew 1] 2] Tipos de rotor - Ejemplos generales mm / s 40 - Ruedas de o!e" llantas" juegos de ruedas" ejes de transmisi#n$ - Cig%e&al-dri'es de motores montados el(stiame el(stiamente nte r(pidas de uatro tiempos )gasolina o diesel* on seis o m(s +linders4*$ - Cig%e&al-dri'es para motores de autom#'iles" amiones + loomotoras$ 1, - ejes de transmisi#n )ejes de la !lie" ardans!a.ts on req espeial - artes de maquinaria de triturai#n$ - artes de maquinaria agrola$ - os omponentes indi'iduales de los motores )gasolina o diesel* para autom#'iles" amiones + loomotoras$ - Cig%e&al-dri'es de motores on seis o m(s ilindros bajo requisitos espeiales$ espeiales$ ," - as pie3as o m(quinas de la planta de proeso$ - rinipales engranajes de turbinas marinas )ser'iios omeriales*$ - Centr.uga tambores$ - os a.iionados - 'iones 'iones 5ontado rotores de turbina de gas$ - 6l+ ruedas$ - 7mpulsores de la bomba$ - 5(quina-!erramienta + pie3as de maquinaria en general$ - armaduras eltrias normales$ - os omponentes indi'iduales de los motores de bajo requisitos espeiales$ G 2"8 2"8 - as turbinas de gas + 'apor" inluidas las turbinas marinas marinas )marina merante*$ - Rotores turbo-generador rgido$ - Rotores$ - Turboompres Turboompresores$ ores$ - 9nidades de la m(quina-!erramienta$ - 5edianas + grandes armaduras eltrias on requisitos espeiales$ - armaduras eltrias peque&as$ - bombas de turbina$ G1 1 - Grabadora + .on#gra.os )gram#.ono* unidades$ - 9nidades de molienda m(quina$ - rmaduras eltrios peque&os on requisitos espeiales G 0"4 0"4 - :pinles" disos + armaduras de reti.iadoras de preisi#n$ - os girosopios$ G 40 G 1, G ," 1] ; w 2<n / ,0-= / 0" si n se mide en re'oluiones por minuto + w en radianes por segundo$ ara simpli.iar> Tolerania Tolerania ; Componente eso ?@g] < Grado de alidad < A84A / 'eloidad operaional ?R5] 2] En general" para rotores rgidos de dos planos de orrei#n" la mitad del desequilibrio residual reomendada es para ser tomado para ada plano$ Lo que está equilibrando? Par ara a la per ers sona pro rome med dio io,, bala lan nceo de roto torr es a me men nudo un "a "art rte e negro". Conocimiento mayora de la gente de equilibrio se limita a las ruedas de coc!e y los neumáticos que deben equilibrarse antes de colocar a los coc!es de lo contrario #an a e$perimentar #ibraciones del #olante, el desgaste irregular de los neumáticos y as sucesi#amente. %ste artculo le dará una idea de el mundo de equilibrio y ayudar a eliminar el "arte negro". &n rotor desequilibrado 'esequilibrio e$iste en un rotor cuando el e(e de centro de masa es di)erent 'esequilibrio di)erente e a su e(e central en )uncionamiento.Prácticame )uncionamiento.Prácticamente nte todas las pie*as reci+n mecani*adas no so son n sim sim+tr +trica icas s de debi bido do a so sopla plarr ag agu(e u(eros ros en )un )undic dici in, n, nn-mer mero o imp impar ar y la posic po sicin in de los ag agu(e u(ero ros s de los to torni rnillo llos, s, pi pie*a e*as s in insta stalad ladas as )u )uera era de dell ce centr ntro, o, diámetros mecani*ados e$c+ntricos a los puntos de apoyo, etc. &n ro roto torr de dese sequ quil ilib ibra rado do,, al gi gira rarr, qu quie iere re gi gira rarr en to torn rno o a su e( e(e e ce cent ntra rall en masa. 'ebido a que los co(inetes restringen este mo#imiento, la )uer*a centr)uga, debido al desequilibrio, !ace que el rotor a #ibrar. %sta #ibracin causas lle#an a los co(inetes, crea ruidos innecesarios y, en casos e$tremos, la desintegracin del roto ro torr en s pu pued ede e se serr e$ e$pe peri rime ment ntad ado. o. Po Porr ta tant nto, o, es ne nece cesa sari rio o re redu duci cirr el desequilibrio a un lmite aceptable. %quilibrio lmites ay lmites de equilibrio, al igual que los lmites de mecani*ado, en el que el desequilibrio desequi librio es aceptab aceptable. le. Las normas internac internacionales ionales y naciona nacionales les se citan para rotores, por e(emplo /. ruedas de coc!e están equilibrados con un lmite de 01 grados grad os y peq peque2a ue2as s arma armadura duras s el+ el+ctri ctricas cas está están n equ equilib ilibrado rados s a gra grado do 3,4. Los grados se con#ierten a desequilibrar unidades, dependiendo de la #elocidad de rotacin del rotor seg-n ISO 5601 estándares. &se la calculadora en equilibrio/ la calculadora de tolerancia &nidades de desequilibrio Las unidades de desequilibrio son masas #eces el radio, por e(emplo/ un peso a2adido a una cierta posicin en la pie*a que se está equilibrada cambiara el e(e de masas en el e(e que discurre y por lo tanto estar en equilibrio. %l peso de la correccin multiplicado por el radio aplicada dará una unidad de desequilibrio. Para la medicin m+trica las unidades estarán gram7milmetros 8G99: o para grandes rotores, gram7centmetros. %l equi#alente Imperial será gram7pulgadas o o* pu pulga lgadas das.. %s %ste te pes peso o 8ma 8masa sa:: se ap aplic licar ara a a una rad radio io de desd sde e el ce centr ntro o de )uncionamiento en la posicin de la lu*. ;ipos de rotores Los rotores se di#iden en dos grupos. &no de ellos es donde el rotor es rgido y no des#a !asta e incluyendo la #elocidad de )uncionamiento. %l otro grupo comprende rotores )le$ibles que se "inclinan" a la #elocidad de )uncionamiento. La primera de)le$in #isto es un "saltarse e)ecto cuerda", que signi)ica el centro del rotor a la #elocidad se mue#e )uera de su e(e de rotacin, causando alta desequilibrio "estático". ;ipos ;i pos de desequilibrio ay tres tipos de desequilibrio/ 5. 'esequilibrio 'esequilibrio estático estático 7 es es donde el e(e de masas slo slo se despla*a despla*a paralelo al e(e del árbol. %l desequilibrio se corrige slo en un plano a$ial. 3. 'esequilibrio 'esequilibrio Pare(a Pare(a 7 es donde el el e(e de masa intersecta intersecta el el e(e que discurre. Por e(emplo/ un disco que tiene resaca run7out sin desequilibrio estático. %l desequilibrio se corrige en dos planos <. 'esequilibrio 'esequilibrio dinámico dinámico 7 es es donde el e(e de de masas no no es coincidente coincidente con el e(e de rotacin. %ste desequilibrio es generalmente una combinacin de desequilibrio estático y pare(a y se corrige en dos planos 9+todos de correccin de desequilibrio La eliminacin de material por taladrado, )resado etc desde la posicin de pesado en el comp componen onente te se util utili*a i*a par para a corr corregir egir el des desequ equilib ilibrio. rio. =lte =lternat rnati#am i#ament ente e se puede pu ede cor corre regir gir a2 a2ad adien iendo do ma mater terial ial a la po posic sicin in de "lu "lu*" *" en el com compo ponen nente te mediante pernos o soldadura de equilibrado para reducir el desequilibrio. 9áquinas para equilibrar Para identi)icar la posicin y la cantidad de desequ desequilibrio, ilibrio, máquinas de equilibrado son utili*ados por una empresa de )abricacin de rotor para corregir cualquier desequilibrio desequi librio que e$iste. %stas %stas máquinas son tan sensibles que pueden identi)icar identi)icar )áci )á cilm lmen ente te y co con n pr prec ecis isi in n cu cual alqu quie ierr 1. 1.11 115m 5mm m e( e(e e ma masa sa )u )uer era a de dell e( e(e e en )uncionamiento. &n tipo de máqu máquina ina slo ide identi) nti)icar icar des desequi equilibr librio io est estátic ático. o. %st %sto o se util utili*a i*a para equi eq uili libr brar ar pi pie* e*as as en )o )orm rma a de di disc sco. o. Ot Otro ro ti tipo po de má máqu quin ina a #a a id iden enti ti)i )ica carr desequilibrios en dos planos a$iales, por e(emplo para el equilibrio de una rotores desequilibrios cuya longitud es proporcionalmente mayor que su diámetro. %stas máquinas están disponibles en #ersiones que equilibran el rotor, ya sea en el e(e !ori*ontal o #ertical. Con el uso de la electrnica moderna, e$actitud supera )ácilmente las normas nacionales e internacionales. La puesta a punto de la máquina es muy sencillo con solo teclear mediciones en una computadora. %quilibrio de rotores rgidos 'ebido a que e$iste desequilibrio en un componente a-n cuando, rotores rgidos estacionarias pueden equilibrarse a ba(a #elocidad, lo su)iciente para producir una )uer*a centr)uga para registrar el desequilibrio. %quilibrar rotores )le$ibles %ste tipo de rotor está equilibrado a una #elocidad ba(a en el que el rotor no se )le$iona. Correccin de desequilibrio se !ace, entonces la #elocidad se incrementa gradualmente, y el desequilibrio se corrige en etapas !asta que se alcan*a la #elocidad de )uncionamiento del rotor. Las t+cnicas modernas Con el alto costo de reempla*ar los rotores da2ados, la industria a+rea estipula que qu e las pa parte rtes s o se secc ccion iones es de rot rotore ores s qu que e se ca cambi mbian an de debe ben n ma mant ntene enerr un equilibrio aceptable. La t+cnica implica el uso de partes adyacentes )icticias, por e(emplo equilibrar equilibrar un mdulo de compresor con un mdulo de la turbina maniqu y la sustitucin de compresores y turbinas de palas sin ning-n equilibrio más. %stas t+cnicas están disponibles para la industria en general si los clientes lo requieran. >esumen Los -ltimos m+todos de produccin reducen o eliminan la necesidad de equilibrar en aplicaciones de ba(a #elocidad, pero cada #e* con mayor #elocidad utili*ados en máquinas rotati#as, será necesario equilibrio dinámico en el )uturo pre#isible.La comprensin de equilibrado dinámico optimi*a el proceso de produccin completo. Equilibrio y rpm CoroChuck 930 está equilibrado conforme a DIN 69 El estándar DIN 69 describe los requisitos de equilibrado de los sistemas de herramientas rotati!as de tal modo que tiene en cuenta la car"a real en los rodamientos del husillo ocasionada por el desequilibrio de la herramienta# El DIN 69 especifica que la car"a de los rodamientos ocasionada por el desequilibrio no debe superar el $ % de la capacidad de car"a dinámica de estos# En este estándar& todos todos los desequilibrios residuales permisibles se indican en '"(mm) y no están asi"nados a un ni!el de calidad de clase * espec+fico conforme a la I,- $9.0/$ / equisitos de calidad del equilibrio para rotores en estado constante 1r+"ido2# l equilibrar una herramienta conforme a la I,- $9.0/$& se permite que la clase de equilibrado * 4#5 a 45 000 rpm presente un desequilibrio de $ "(mmk"# Esto si"nifica que el e l estándar I,- $9.0/$ permite un desequilibrio mayor en un portaherramientas más pesado en comparaci7n con otro más li"ero a la misma !elocidad "iratoria# Incluso aunque un desequilibrio residual diferente ocasione unas fuer8as de desequilibrio y una car"a en los diferentes rodamientos# No se ha alcan8ado una car"a consistente del sistema# No obstante& el desequilibrio dinámico no depende de la masa de la l a herramienta& sino solamente del desequilibrio del sistema de herramientas y de las fuer8as de mecani8ado# -tro problema con el estándar I,- $9.0/$ es que incluso los requisitos re quisitos habituales son suficientes para superar los l+mites posibles de lo que puede medirse por medio de las máquinas de equilibrado habituales y& y& por tanto& tampoco pueden compensarse# modo de eemplo: ;n ni!el de calidad que se precisa con frecuencia es el * 4&5 a 45 000 rpm# Esto tiene como resultado un desequilibrio residual de la herramienta dependiente de la masa !alorado en tan solo $ "(mm< por eemplo: para una herramienta con una masa de $ k"& lo que corresponde a una e=centricidad permisible del centro de "ra!edad de $ >m# ;n caso a?n más claro: En el caso de herramientas más li"eras y !elocidades "iratorias más ele!adas& los requisitos incluso contin?an en aumento# ;na herramienta @,A.0 de 0&35 k" de masa solo presentará un desequilibrio residual de 0&4$ "(mm para cumplir el requisito de * 4&5 a .0 000 rpm 1por eemplo& una e=centricidad del centro de "ra!edad de 0&6 >m2# Incluso aunque la herramienta estB equilibrada conforme a las e=centricidades residuales permisibles 1menores que las des!iaciones ocasionadas por el conunto2& este estado de desequilibrio no puede conse"uirse de una forma reproducible bastante despuBs de la introducci7n en el husillo# l introducir una herramienta @,A conforme a la I,- $4$6. en el husillo& puede alcan8arse una precisi7n de uni7n de 4 >m a . >m 1en funci7n del tamao de la herramienta @,A2# actores como el des"aste y los errores en la des!iaci7n del husillo pueden dar como resultado una precisi7n de uni7n peor# Esto puede tener como resultado un desequilibrio residual reproducible y desfa!orable del sistema en conunto# Esto se aplica en particular a aquellas herramientas con corte yo puntos de separaci7n diferentes como& por eemplo& con una superficie de sueci7n lateral# ásicamente& la precisi7n de la sueci7n y la uni7n se !e reducida re ducida a causa de ello# Feor+a de equilibrado El desequilibrio del rotor puede estar ocasionado por el diseo& el material& la fabricaci7n y el montae# Cada rotor presenta una distribuci7n indi!idual del desequilibrio& incluso en el caso de la producci7n en serie# El equilibrado es un procedimiento por el cual se comprueba& y si es necesario se austa& la distribuci7n de la masa de un rotor# Dicho procedimiento se lle!a a cabo para "aranti8ar que la fuer8a de desequilibrio que act?a sobre los rodamientos del husillo a !elocidad de ser!icio se encuentre dentro de la capacidad de los rodamientos y para ase"urarse de que la !ibraci7n de los rodamientos a una frecuencia determinada se encuentre dentro de los l+mites especificados# • o Desequilibrio& ; '"(mm) ,e trata de una medida para especificar cuánta masa distribuida de forma asimBtrica se des!+a radialmente del ee "iratorio< consulte la i"ura $# El desequilibrio se mide en '"(mm)# U=mxe • o E=centricidad& e 'Gm) Ha distancia entre el centro "iratorio y el centro de "ra!edad< consulte la i"ura $# Ha e=centricidad se mide en 'Gm)# e = U/m • o uer8a desequilibrada& 'N) El desequilibrio crea una fuer8a centr+fu"a que aumenta linealmente con el desequilibrio y cuadráticamente con el n?mero de re!oluciones< consulte la fuer8a centr+fu"a en la i"ura $# Ha fuer8a desequilibrada se mide en 'N)# F = u x ω2 Excentrici dad Masa distribui da de forma asimétri ca Fuerza centrífu ga Centro de graveda d Eje giratorio Figura 1, Teoría del equilibrio • Contraequilibrado Jara compensar las fuer8as centr+fu"as no deseadas& es posible retirar o aadir material para diri"ir el centro de "ra!edad hacia el ee "iratorio< consulte la i"ura 4# Excentrici dad Masa distribui da de forma asimétri ca Centro de graveda d Eje giratorio Excentric idad Masa distribuid a de forma asimétric a Agujero de compensa ción de la broca Centro de gravedad Eje giratorio Figura 2, contraequilibrado. En la primera imagen se muestra un desequilibrio y en la l a segunda se contraequilibra por medio del agujero de compensación de la broca. Fipo de equilibrio conforme a la I,- $9.0$ l equilibrar una herramienta conforme a la I,- $9.0/$& se permite que la clase de equilibrado * 4#5 a 40 000 rpm presente un desequilibrio a $ "(mmk"< consulte la Fabla Fabla $ a continuaci7n# El estándar I,- $9.0$ permite un mayor desequilibrio en un portaherramientas más pesado que otro más li"ero a la misma !elocidad "iratoria# Incluso aunque diferentes desequilibrios crean diferentes fuer8as de desequilibrio& por lo que no se obtiene una car"a consistente del sistema# • o Fipo de equilibrio 1I,- $9.0$2& * ,e"?n la I,- $9.0$ / equisitos de calidad del equilibrio para rotores en estado constante 1r+"ido2< * es una medici7n de la calidad de equilibrado de un cuerpo "iratorio# * es la !elocidad tan"encial en el centro de "ra!edad en relaci7n con la !elocidad "iratoria# * depende de la !elocidad "iratoria 1n2& la masa del cuerpo 1m2 y el desequilibrio 1u2# Ha clase * no podrá identificarse sin conocer la !elocidad "iratoria# G = e x ω /1000 = e x n/9549 = u/m x n/9549 [mm/s] Desequilibrio específco residual permisible, epor, g-mm/kg Velocidad de servicio n, r/min Tabla 1, desequilibrio específico residual permisible para diferentes niveles clase de la !"# 1$%&'1. Debido a la meora de los materiales de corte y las herramientas& las !elocidades de corte del metal han aumentado en los ?ltimos aos# Esta e!oluci7n ha tenido como resultado nue!os requisitos en cuanto al estado de equilibrado de los sistemas en conunto 1husillo de la máquina& dispositi!o de sueci7n y herramienta2# Hos requisitos indicados en la I,- $9.0/$ acerca de la calidad del equilibrio para rotores en estado constante 1r+"ido2 no pueden aplicarse a estos sistemas totales por las si"uientes ra8ones: Hos husillos de la máquina& dispositi!os de sueci7n y herramientas muestran caracter+sticas esenciales en contraste con otros rotores constantes 1r+"idos2 1por eemplo: motores elBctricos& rotores& etc#2: e tc#2: • • • El husillo& el dispositi!o de sueci7n y la herramienta constituyen un sistema con des!iaciones temporales parcialmente ele!adas 1por eemplo: cambios de herramienta frecuentes en centros de mecani8ado2# Debido a las imprecisiones de sueci7n radiales y relacionadas con el án"ulo& un cambio de herramientas repetido con el husillo tendrá como resultado un cambio en el estado e stado de equilibrado del sistema en conunto# Has tolerancias de auste de las pie8as indi!iduales 1husillo& dispositi!os de sueci7n y herramienta2 limitan el proceso de equilibrado# En particular& las imprecisiones de sueci7n del sistema de herramientas y el husillo eercen l+mites espec+ficos para el sistema sobre el estado de equilibrado reproducible& si el equilibrado no se lle!a a cabo con el sistema de uni7n& incluido el husillo# http://www.sandvik.coromant.com/es-es/knowledge/tooling-sstems/machinehttp://www.sandvik.coromant.co m/es-es/knowledge/tooling-sstems/machineand-tooling-sstems-considerations/balancing-and-rpm/pages/de!ault.asp" http://www.universalbalancing.co.uk/en/balancing-in!ormatio http://www.universalbalancing.co .uk/en/balancing-in!ormation/iso-qualitn/iso-qualitgrades