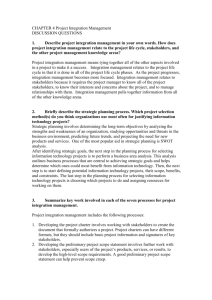
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/336510171 Introduction to Creep Mechanics Chapter · January 2019 DOI: 10.1007/978-3-662-53605-6_155-1 CITATIONS READS 4 6,759 2 authors: Holm Altenbach Johanna Eisenträger Otto-von-Guericke-Universität Magdeburg Leibniz Institut for Materials Engineering IWT 815 PUBLICATIONS 8,402 CITATIONS 30 PUBLICATIONS 291 CITATIONS SEE PROFILE All content following this page was uploaded by Johanna Eisenträger on 14 October 2019. The user has requested enhancement of the downloaded file. SEE PROFILE Chapter 1 Introduction to Creep Mechanics Holm Altenbach and Johanna Eisenträger Synonyms Mechanics of time-dependent material behavior Definitions • Creep mechanics is a branch of continuum mechanics taking into account the time-dependent material behavior like non-reversible deformations under the influence of constant mechanical stresses, which is named “creep”. Creep can occur as a result of long-term exposure to certain levels of stresses that are still below the yield stress of a material. Furthermore, creep is frequently observed in materials during long-term exposure to heat. The tendency to creep increases while approaching the melting point of the material. • The phenomenon creep describes the increase in deformation with time under constant loads. A further time-dependent effect is relaxation, where the continuous decrease of the stress level occurs in a material subjected to constant prescribed strains at elevated temperatures. • Note that the time-dependent inelastic deformation of structures is also strongly connected to stress redistribution. • Furthermore, in contrast to creep in homogeneous bulk materials, where uni-axial stress states prevail, creep in structures results in multi-axial stress states, which should be accounted for by a constitutive model. Holm Altenbach · Johanna Eisenträger Institut für Mechanik, Fakultät für Maschinenbau, Otto-von-Guericke-Universität Magdeburg, Universitätsplatz 2, 39106 Magdeburg, Germany e-mail: holm.altenbach@ovgu.de, johanna.eisentraeger@ovgu.de 1 2 Holm Altenbach and Johanna Eisenträger 1.1 Introduction and Historical Remarks Creep mechanics focuses on modeling the mechanical behavior of engineering components made of metals or alloys at elevated temperatures (0.3–0.7 of the melting temperature Tm of the given material). In this case, inelastic deformation under sustained loads (below the yield stress σy ) occurs. This phenomenon can change the mechanical behavior significantly and reduce the lifetime of components. In addition, creep also occurs in other materials, for example, in polymeric materials (plastics, rubber), ceramics, concrete, composites, etc. In these cases, the temperature level is usually significantly lower, but sometimes also much higher compared to metals and alloys. This results also in different time scales. It is worth noting that the International Union of Theoretical and Applied Mechanics organized a symposium on ”Creep in Structures”, which takes place every ten years starting from 1960, cf. (Hoff, 1962; Hult, 1972; Ponter and Hayhurst, 1981; Zyczkowski, 1991; Murakami and Ohno, 2001). The establishment of this symposium is due to the fact that creep tests for metals and alloys are long-term experiments. In 2000, research on the creep behavior of other materials was presented as well during this symposium (Murakami and Ohno, 2001), whereby also short-term experiments were taken into account. A special branch of creep mechanics is devoted to problems of inelastic timedependent deformations of ice. In this case, the temperature level when creep can be observed is below 0◦ C. Note that in Weertman (1983) experimental results and general ideas are presented for this particular type of creep. Due to the development of scientific instruments based on the principle of superconductivity in the past decades, the time-dependent material behavior at extremely low temperatures is in the focus of researchers, which is discussed for example by Skoczeń (2018). The starting point of creep mechanics was in the second half of the 19th century after some unexpected failures of steam machines. The first investigations were made with a focus on metals and alloys. At the beginning of the 20th century, results were summarized for the first time in da Costa Andrade (1910, 1914). In 1910, da Costa Andrade established the terminology still used up to the present and introduced the concept of primary, secondary, and tertiary creep for uni-axial creep tests under constant load or stress. As a consequence of demands of technology, approximately 20 years later an increasing interest in better knowledge of creep phenomena arose. Norton (1929) investigated the power law for secondary creep ε̇ ≡ dε = Aσ n dt with respect to applications for various metals. The introduced creep law ( where ε denotes the creep strain, ε̇ the corresponding rate, and σ the uni-axial stress) is very simple and contains only two material parameters. At the same time (here, we provide the references to two later publications, Bailey, 1935, 1947), it was shown that similar to time-independent plasticity, creep deformations of structural metals 1 Introduction to Creep Mechanics 3 take place under constant volume and the superimposed hydrostatic pressure does not influence creep. In 1934, multi-axial creep equations were suggested by F. K. G. Odqvist (see Odqvist, 1974, among others) ε̇ε = f σeq s with the strain rate tensor ε̇ε and the equivalent stress in the von Mises sense 3 2 σeq = s ··ss. 2 Here, s ··ss denotes the double scalar product of the stress deviator s . For the conformity with Norton’s law, the following expression can be used for the scalar function f : 3 n−1 f (σeq ) = Aσeq . 2 Odqvist’s theory is similar to the von Mises theory for time-independent plasticity. The approach is straightforward to formulate since one only needs two parameters obtained through a one-dimensional creep test and it can be extended to primary and tertiary creep by introducing hardening, softening, and damage parameters (see, for example Naumenko and Altenbach, 2016). The principal idea of the extension of the secondary creep equations to primary and Holm tertiary creepandisJohanna demonstrated 4 Altenbach Eisenträger in Fig. 1.1. In a first step, the equation for secondary creep will be established for the range σ = const, T = const Creep strain Fracture ω = ω∗ σ1 σ2 > σ1 Tertiary ω̇ = gω (σ , H, ω , T) Secondary cr = g (σ , T ) ε̇min ε Primary Ḣ = gH (σ , H, T ) Time cr cr = 0 Constitutive equation, ε̇ = gε (σ , H, ω, T ), εt=0 Ḣ = gH (σ , H, ω, T ), Ht=0 = 0 Evolution equation (hardening), ω̇ = gω (σ , H, ω, T ), ωt=0 = 0 Evolution equation (damage) Fig. 1.1 Classical phenomenological modeling of creep with a hardening variable H and an cr = 0 Constitutive equation σ , H, , T), εT ε̇ cr = gωε ((σ isotropic damage variable =ωconst, const) t=0= Ḣ = gH (σ , H, ω , T), Ht=0 = 0 Evolution equation (hardening) ω̇ = gω (σ , H, ω , T), ωt=0 = 0 Evolution equation (damage) Fig. 1 Classical phenomenological modeling of creep with hardening H and isotropic damage ω (σ = const, T = const) • Sintering They are related to different mechanisms which depends on the temperature and stress levels. Such mechanisms are bulk diffusion, climb (the strains are accomplished by a climb), climb-assisted glide (dislocations can go around obstacles), grain boundary diffusion or thermally activated glide. Some mechanisms of creep have not been verified by direct microstructural examination yet. In dependence of the mechanism various equations are suggested for the description of creep. Not all are suitable for creep mechanics analyses. Below some of these 4 Holm Altenbach and Johanna Eisenträger of the minimum creep rate. Afterwards, the evolution of the hardening variable can be established. Last but not least, the damage evolution will be introduced to describe the tertiary creep range. In the end, one obtains a coupled system of ordinary differential equations with respect to time. Probably the first approach to describe primary creep was presented in 1938 by A. Nadai, who suggested an equation of state for strain hardening (Nádai, 1963). In addition, a different equation was introduced for time hardening by Finnie (1960). First theories for tertiary creep were developed by Kachanov (1958) and Rabotnov (1959), who introduced the concept of material deterioration. In their simplest form, the theories are based on two material parameters derived from a standard creep rupture curve, which illustrates the dependence of the time to rupture on the applied stress level. Further information can be found for example in Kowalewski and Ustrzycka (2018). In addition, Knych et al (2018) report on current trends in creep mechanics. Other types of time-dependent material behavior, such as viscoelasticity and viscoplasticity, are presented in Milewski (2018); Sumelka and Łodygowski (2018). Special attention to solving problems is paid in Naumenko and Altenbach (2007, 2016, 2019); Rabotnov (1969); Szuwalski and Ustrzycka (2018) and the references within. Furthermore, information on the micromechanics of creep is given in KowalczykGajewska (2018). 1.2 Creep of Metallic Materials 1.2.1 Creep Stages Based on the terminology of da Costa Andrade (1910, 1914), one distinguishes three stages, while the elastic range is usually ignored. In the initial stage (primary or decelerate creep, sometimes also transient creep), the strain rate is relatively high, but decreases with increasing time and strain due to a process analogous to work hardening at lower temperatures. For instance, the dislocation density increases and in many materials a dislocation subgrain structure is formed and the cell size decreases with strain (Courtney, 2005). With increasing deformation, the strain rate will attain its minimum and become nearly constant as the secondary stage begins. This is due to the balance between work hardening and annealing (thermal softening). The secondary stage is also often referred to as steady-state creep. However, it is worth pointing out that various microstructural processes take place during this stage. Now, recovery effects are concurrent with deformation. Note that changes in material strength are only minor during these first two stages of creep. The last stage (tertiary or accelerated creep) is again related to an increase of the strain rate. Here, softening processes are dominant. At the same time distributed damage occurs and finally fracture can be observed. 1 Introduction to Creep Mechanics 5 1.2.2 Types of Creep In material science, one distinguishes the following types of creep (Cotrell, 1967): • • • • • • • dislocation creep, Nabarro-Herring creep Coble creep solute drag creep dislocation climb-glide creep Harper-Dorn creep sintering They are related to different microstructural mechanisms, which depend on the temperature and stress levels. Such mechanisms are for example bulk diffusion, climb (the strains are accomplished by climbing dislocations), climb-assisted glide (dislocations can go around obstacles), grain boundary diffusion or thermally activated glide. Note that some mechanisms of creep have not been verified by direct microstructural examinations yet. The so-called deformation-mechanism maps summarize the relations between deformation and mechanisms for many materials, cf. Frost and Ashby (1982); Nabarro and de Villiers (1995); François et al (2012). Deformation-mechanism maps represent the dominant deformation mechanisms in diagrams based on the normalized shear stress, which is displayed with respect to the homologous temperature. Depending on the microstructural mechanisms, various equations are suggested for the description of creep. However, not all are suitable for structural analysis in creep mechanics. Below, some of these equations are presented. 1.2.3 Materials Science-Based Creep Equations 1.2.3.1 General Creep Equation The general creep equation is formulated for the creep strain rate ε̇ = Q Cσ m − kT , e db (1.1) whereas C is a parameter depending on the material and the particular creep mechanism, m and b are exponents related to the creep mechanism, Q is the activation energy of the creep mechanism, d denotes the average grain size of the material, k ≈ 8.31696 J (mol K)−1 is Boltzmann’s constant, and T is the absolute temperature. Note that Equation (1.1) is a power law function. 6 Holm Altenbach and Johanna Eisenträger 1.2.3.2 Dislocation Creep At high stresses (relative to the shear modulus G), creep is controlled by the movement of dislocations. For dislocation creep, the activation energy Q is related to self-diffusion, the exponent m is in the range 4 . . . 6, and b = 0 holds. It is obvious that dislocation creep is strongly influenced by the applied stress and the intrinsic activation energy, while the influence of the grain size can be neglected. Note that some alloys feature a very large stress exponent (m > 10). In this case, a threshold stress σth will be introduce: creep cannot be measured below this value. Equation (1.1) should be modified as follows ε̇ = Q A(σ − σth )m − kT , e db (1.2) where A, Q and m can all be related to conventional mechanisms. The applied stress tends to drive the dislocations past the barrier. After bypassing an obstacle, dislocations get into a lower energy state. A significant part of the work required to overcome the energy barrier of passing an obstacle is provided by the applied stress, while the remaining impulse is provided by thermal energy. As a result, creep increases in these cases. 1.2.3.3 Nabarro-Herring Creep In contrast to dislocation glide creep, which does not involve atomic diffusion, Nabarro-Herring creep belongs to the diffusional creep mechanisms. This creep mechanism dominates the material behavior particularly at high temperatures and low stresses. The sides of the crystal are subjected both to tensile and compressive stresses and the atomic volume is changed due to the applied stresses: it increases under tension and decreases under compression. The activation energy for vacancy formation is changed by ±σ Ω , where Ω represents the atomic volume, the sign + refers to compressive regions and a negative sign describes tensile regions. Since Ω the fractional vacancy concentration is proportional to exp(− Qf ±σ kT ), where Qf is the vacancy-formation energy, the vacancy concentration is higher in tensile regions than in compressive regions, leading to a net flow of vacancies from the regions under tension to the regions under compression, which is equivalent to a net atom diffusion in the opposite direction, which causes the creep deformation: the grain elongates in the tensile stress axis and contracts in the compressive stress regime. In the following, we assume the following values for the creep exponents: m = 1 and b = 2, which results in a weak stress dependence and a moderate influence of the grain size. If the creep rate decreases, the grain size increases. Furthermore, one should note that Nabarro-Herring creep is strongly temperature dependent. It dominates at very high temperatures relative to a material’s melting temperature. 1 Introduction to Creep Mechanics 7 1.2.3.4 Coble Creep Coble creep is another form of diffusional creep. The atoms diffuse along grain boundaries to elongate the grains in the stress direction. In this case, the influence of the grain size on creep deformations is significantly higher compared to NabarroHerring creep. Thus, this mechanism is of higher importance for materials made of very fine grains. Note that the Boltzmann’s constant k is related to the diffusion coefficient of atoms along the grain boundary, Q describes the grain boundary diffusion, and m = 1 and b = 3 hold for the exponents. Since the activation energy for grain boundary diffusion is smaller than in the case of self-diffusion, this creep mechanism occurs at lower temperatures in comparison to Nabarro-Herring creep. Although Coble creep is temperature-dependent as well, the influence of temperature is not as strong as for Nabarro-Herring creep. It also exhibits the same linear dependence on stress as Nabarro-Herring creep. In general, the diffusional creep rate should be obtained as a sum of the Nabarro-Herring creep rate and the Coble creep rate. Note that diffusion creep results in grain-boundary separation and the occurrence of voids or cracks between grains. As a result of these mechanisms, grain-boundary sliding starts. If grain-boundary sliding cannot accommodate the incompatibility, the voids at the grain boundaries lead to the initiation of creep fracture. 1.3 Creep Equations for Structural Analysis Creep failure must be prevented, and the lifetime of components should be predicted in an accurate manner. Consequently, there is a high demand for constitutive models accounting for not only one-dimensional effects, but also three-dimensional stress and strain states. As additional challenges, non-isothermal, and cyclic operating conditions should be taken into account. Thus, not only long-term creep strains should be predicted accurately, but also short-term plastic strains as well as the interaction of both deformation modes. Constitutive equations for metallic materials are well presented in various monographs and textbooks, among them Hult (1966); Odqvist (1974); Penny and Marriott (1995); Naumenko and Altenbach (2007); Betten (2008); Naumenko and Altenbach (2016). 1.3.1 Basic Idea: Separation Ansatz An essential part of creep models is the proper description of the stress and temperature influence by so-called response functions. These functions are specific for each deformation mechanism, and the choice of these functions can be based on information from deformation mechanism maps (Frost and Ashby, 1982; Nabarro and de Villiers, 1995; François et al, 2012). In the following, let us assume that 8 Holm Altenbach and Johanna Eisenträger the influence of the stress and temperature can be separated. We will introduce some commonly used stress and temperature response functions with respect to onedimensional stress and strain states. In the simplest case, the creep strain rate is a function of the stress σ and the temperature T : ε̇ = f (σ , T ). (1.3) This function can be extended to include further influences, but in this case the effort for the identification of material parameters increases in accordance to the number of variables. Even in the simplest case, the identification is not straightforward since all influences are usually coupled. A separation ansatz can simplify this procedure. To define the dependence of the creep strain rate ε̇ on the stress σ and the temperature T , the following approximation is frequently introduced: ε̇ = fσ (σ ) fT (T ), (1.4) which is a product of the stress response function fσ and the temperature response function fT . The Norton power law represents one of the most commonly used expression for the stress response function: fσ (σ ) = Aσ n . (1.5) The material parameters A and n (creep exponent) should be estimated from creep experiments. Diffusion creep is usually described by employing a linear stress function (Herring, 1950; Harper and Dorn, 1957; Coble, 1963; Lifshitz, 1963), i.e. n = 1: fσ (σ ) = Bσ , (1.6) with the material parameter B. It is obvious that such a behavior is similar to the behavior of a viscous fluid. Another common choice to describe creep at low temperatures and with respect to wide stress ranges is a hyperbolic function (Dyson and McLean, 2001): fσ (σ ) = C sinh (Dσ ) . (1.7) Again, the material parameters C and D must be determined based on experimental data. To express the dependence of the creep strain rate on temperature, the Arrhenius function is a popular choice (Dorn, 1955; Ilschner, 1973): Q (1.8) fT (T ) = α exp − kT with the material parameter α, the activation energy Q, and the Boltzmann constant k. As has already been pointed out, the temperature exerts a significant influence on creep and relaxation phenomena. This is due to the fact that creep is based on microstructural processes, which are highly dependent on the temperature. However, because of the great variety of materials affected by creep, the classification of creep 1 Introduction to Creep Mechanics 9 with respect to temperature is not uniform in literature, i.e. a clear and widespread definition of low and high-temperature creep does not exist. Note that temperature ranges in creep are often indicated with respect to the liquidus temperature TL of the material under consideration. Other indicators are the solidus TS or melting Tm temperature. According to Naumenko and Altenbach (2016), high temperature materials are used at a temperature range of 0.3–0.7 Tm . In Frost and Ashby (1982), it is stated that polycrystalline solids start to creep at 0.5 TL , whereas a temperature level of 0.9 TL is referred to as “very high” temperature level. In addition, according to McLean (1966), the temperature range 0.3–0.9 TL is most important for engineering applications, while in this main creep range, two separate creep regimes are distinguished, low temperature (LT) creep at 0.3–0.5 TL and high temperature (HT) creep at 0.5– 0.9 TL . Higher temperatures are related to other mechanisms and should be presented by the so-called power-break law. There are also other approaches (Eisenträger and Altenbach, 2020). However, practical applications involving structural analyses still represent a major challenge. Only approaches using advanced rheological models, which are highly non+linear, but reflect the mechanisms separately, simulate real creep behavior with an adequate accuracy and involving only moderate computational effort, cf. e.g. Eisenträger et al (2018a,b,c); Eisenträger (2018). 1.3.2 Extension to Three-Dimensional Behavior The equations suggested in the previous section can be extended to multi-axial stress and strain states considering the following three main steps: • substitution of the scalar stress by a tensorial variable, • substitution of the scalar strain by a tensorial variable, and • introduction of an equivalent stress. It seems that the extension is straightforward, but there are several difficulties. It seems natural to use the stress tensor and the strain tensor. However, with respect to Bailey’s statements (Bailey, 1935), several questions arise: should one choose the stress or strain tensor or deviator, respectively. Here, one should also consider the axioms of rheology (Reiner, 1960) and statements of Palmow (1984). The last item in above list is much more complicated. Even in the case of isotropic materials, the choice of an equivalent stress cannot be based on rational approaches such as balance equations. Instead, the introduction of some hypotheses and experimental proofs allow the introduction of an adequate expression for the equivalent stress (for further reading: Altenbach and Öchsner, 2014). 10 Holm Altenbach and Johanna Eisenträger 1.3.3 Anisotropic Creep In the case of anisotropic creep, one should distinguish between: • initially anisotropic materials, and • initially isotropic materials which become anisotropic due to creep deformations (for example in case of anisotropic damage). In the first case, tensor calculus is helpful since some suggestions for the constitutive equations can be made based on the mathematical analysis (Naumenko and Altenbach, 2016). The second case is more complicated since further evolution equations should be taken into account. 1.4 Cross-References • • • • • • • • • • • Creep at Extremely Low Temperatures Anisotropy of Linear Creep Creep Deformation Creep Fatigue Creep in Modern Materials Creep in Structures Micromechanics of Creep Viscoelasticity Viscoplasticity Nádai, Arpád von Mises, Richard References Altenbach H, Öchsner A (eds) (2014) Plasticity of Pressure-Sensitive Materials. Engineering Materials, Springer, Berlin, Heidelberg, DOI 10.1007/978-3-642-40945-5 Bailey RW (1935) The utilization of creep test data in engineering design. Proceedings of The Institution of Mechanical Engineers 131(1):131–349 Bailey RW (1947) Engineering materials. Proceedings of the Institution of Mechanical Engineers 157(1):274–277 Betten J (2008) Creep Mechanics, 3rd edn. Springer, Berlin, Heidelberg Coble RL (1963) A Model for Boundary Diffusion Controlled Creep in Polycrystalline Materials. Journal of Applied Physics 34(6):1679–1682, DOI 10.1063/1.1702656 da Costa Andrade EN (1910) On the Viscous Flow in Metals, and Allied Phenomena. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 84(567):1–12, DOI 10.1098/rspa.1910.0050 da Costa Andrade EN (1914) The Flow in Metals under Large Constant Stresses. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 90(619):329–342 Cotrell AH (1967) An Introduction to Metallurgy. Edward Arnold, London 1 Introduction to Creep Mechanics 11 Courtney TH (2005) Mechanical Behavior of Materials. Waveland Press, Long Grove, IL Dorn JE (1955) Some fundamental experiments on high temperature creep. Journal of the Mechanics and Physics of Solids 3(2):85–116, DOI 10.1016/0022-5096(55)90054-5 Dyson BF, McLean M (2001) Micromechanism-quantification for creep constitutive equations. In: Murakami S, Ohno N (eds) IUTAM Symposium on Creep in Structures, Kluwer, Dordrecht, pp 3–16 Eisenträger J (2018) A Framework for Modeling The Mechanical Behavior of Tempered Martensitic Steels at High Temperatures. PhD thesis, Otto von Guericke University Magdeburg Eisenträger J, Altenbach H (2020) Creep in heat-resistant steels at elevated temperatures. In: Altenbach H, Öchsner A (eds) State of the Art and Future Trends in Material Modeling, Springer International Publishing, Advanced Structured Materials, vol 100, pp 79–112 Eisenträger J, Naumenko K, Altenbach H (2018a) Calibration of a Phase Mixture Model for Hardening and Softening Regimes in Tempered Martensitic Steel Over Wide Stress and Temperature Ranges. The Journal of Strain Analysis for Engineering Design 53:156–177, DOI 10.1177/0309324718755956 Eisenträger J, Naumenko K, Altenbach H (2018b) Implementation of a Phase Mixture Model for Rate-Dependent Inelasticity. Proceedings in Applied Mathematics and Mechanics 18:1–2, DOI 10.1002/pamm.201800200 Eisenträger J, Naumenko K, Altenbach H (2018c) Numerical implementation of a phase mixture model for rate-dependent inelasticity of tempered martensitic steels. Acta Mechanica 229:3051–3068, DOI 10.1007/s00707-018-2151-1 Finnie I (1960) Stress analysis in the presence of creep. Applied Mechanics Review 13:705–712 François D, Pineau A, Zaoui A (2012) Mechanical Behaviour of Materials. Springer Netherlands, DOI 10.1007/978-94-007-2546-1 Frost HJ, Ashby MF (1982) Deformation-Mechanism Maps: The Plasticity and Creep of Metals and Ceramics. Pergamon Press Harper J, Dorn J (1957) Viscous creep of aluminum near its melting temperature. Acta Metallurgica 5(11):654–665, DOI 10.1016/0001-6160(57)90112-8 Herring C (1950) Diffusional Viscosity of a Polycrystalline Solid. Journal of Applied Physics 21(5):437–445, DOI 10.1063/1.1699681 Hoff N (ed) (1962) Creep in Structures. Springer, Berlin Hult J (ed) (1972) Creep in Structures. Springer, Berlin, Heidelberg, New York Hult JAH (1966) Creep in Engineering Structures. John Wiley & Sons Canada Ilschner B (1973) Hochtemperatur-Plastizität: Warmfestigkeit und Warmverformbarkeit metallischer und nichtmetallischer Werkstoffe. Reine und angewandte Metallkunde in Einzeldarstellungen, Springer Kachanov LM (1958) O vremeni razrusheniya v usloviyakh polzuchesti (On the time to rupture under creep conditions, in Russ.). Izv AN SSSR Otd Tekh Nauk 8:26–31 Knych T, Mamala A, Smyrak B (2018) Creep in modern materials. In: Altenbach H, Öchsner A (eds) Encyclopedia of Continuum Mechanics, Springer, Berlin, Heidelberg, pp 1–12 Kowalczyk-Gajewska K (2018) Micromechanics of creep. In: Altenbach H, Öchsner A (eds) Encyclopedia of Continuum Mechanics, Springer, Berlin, Heidelberg, pp 1–15 Kowalewski ZL, Ustrzycka A (2018) Creep deformation. In: Altenbach H, Öchsner A (eds) Encyclopedia of Continuum Mechanics, Springer, Berlin, Heidelberg, pp 1–10 Lifshitz IM (1963) On the theory of diffusion-viscous flow of polycrystalline bodies. Soviet Physics JETP 17:909–920 McLean D (1966) The physics of high temperature creep in metals. Reports on Progress in Physics 29(1):1–33 Milewski G (2018) Viscoelasticity. In: Altenbach H, Öchsner A (eds) Encyclopedia of Continuum Mechanics, Springer, Berlin, Heidelberg, pp 1–14 Murakami S, Ohno N (eds) (2001) IUTAM Symposium on Creep in Structures. Kluwer, Dordrecht Nabarro FRN, de Villiers HL (1995) The Physics of Creep: Creep and Creep-resistant Alloys. Taylor & Francis Nádai A (1963) Theory of flow and fracture of solids. McGraw-Hill, New York 12 Holm Altenbach and Johanna Eisenträger Naumenko K, Altenbach H (2007) Modeling of Creep for Structural Analysis. Foundations of Engineering Mechanics, Springer Berlin Heidelberg Naumenko K, Altenbach H (2016) Modeling High Temperature Materials Behavior for Structural Analysis: Part I: Continuum Mechanics Foundations and Constitutive Models, Advanced Structured Materials, vol 28. Springer International Publishing Naumenko K, Altenbach H (2019) Modeling High Temperature Materials Behavior for Structural Analysis: Part II: Solution Procedures and Structural Analysis Examples Konstantin, Advanced Structured Materials, vol 112. Springer International Publishing Norton FH (1929) Creep of Steel at High Temperatures. McGraw-Hill, New York Odqvist FKG (1974) Mathematical Theory of Creep and Creep Rupture. Oxford University Press Palmow WA (1984) Rheologische Modelle für Materialien bei endlichen Deformationen. Technische Mechanik 5(4):20–31 Penny RK, Marriott DL (1995) Design for Creep. Chapman & Hall Ponter ARS, Hayhurst DR (eds) (1981) Creep in Structures. Springer, Berlin Rabotnov YN (1959) O mechanizme dlitel’nogo razrusheniya (A mechanism of the long term fracture, in Russ.). In: Voprosy prochnosti materialov i konstruktsii, Publ. AN SSSR, Moscow, pp 5–7 Rabotnov YN (1969) Creep Problems in Structural Members. North-Holland, Amsterdam Reiner M (1960) Deformation, strain, and flow: An elementary introduction to rheology, 2nd edn. Interscience, New York, London Skoczeń B (2018) Creep at extremely low temperatures. In: Altenbach H, Öchsner A (eds) Encyclopedia of Continuum Mechanics, Springer, Berlin, Heidelberg, pp 1–13 Sumelka W, Łodygowski T (2018) Viscoplasticity. In: Altenbach H, Öchsner A (eds) Encyclopedia of Continuum Mechanics, Springer, Berlin, Heidelberg, pp 1–5 Szuwalski K, Ustrzycka A (2018) Creep in structures. In: Altenbach H, Öchsner A (eds) Encyclopedia of Continuum Mechanics, Springer, Berlin, Heidelberg, pp 1–11 Weertman J (1983) Creep deformation of ice. Annual Review of Earth and Planetary Sciences 11(1):215–240 Zyczkowski M (ed) (1991) Creep in Structures. Springer, Berlin, Heidelberg View publication stats