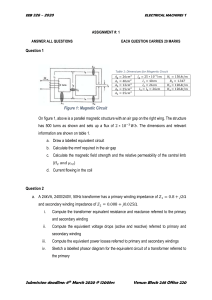
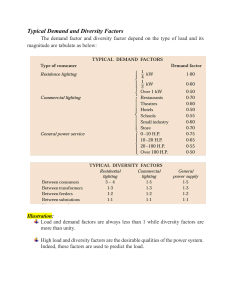
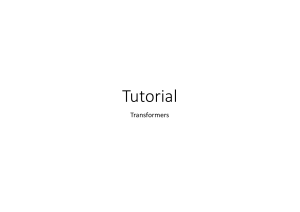
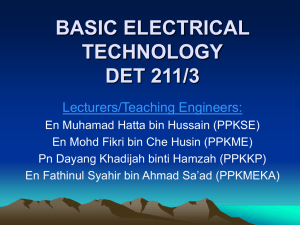
Electric Power Systems Research 144 (2017) 32–40 Contents lists available at ScienceDirect Electric Power Systems Research journal homepage: www.elsevier.com/locate/epsr Influence of tertiary stabilizing windings on zero-sequence performance of three-phase three-legged YNynd transformers. Part I: Equivalent circuit models Angel Ramos a,∗ , Juan Carlos Burgos b a b Gas Natural Fenosa, Madrid, Spain Universidad Carlos III de Madrid, Leganés, Madrid, Spain a r t i c l e i n f o Article history: Received 4 October 2015 Received in revised form 27 July 2016 Accepted 29 October 2016 Available online 23 November 2016 Keywords: Three-winding transformers Tertiary stabilizing windings Transformer zero-sequence performance Onsite zero-sequence impedance measurements Transformer equivalent circuits a b s t r a c t The presence of a stabilizing winding (or tertiary stabilizing winding when is used to for auxiliary applications) in three-phase three-legged YNynd transformers remarkably affects the zero-sequence performance of both the transformer and the network. This paper presents a detailed analysis of the influence of the stabilizing winding on the zero-sequence behavior of three-phase three-legged YNynd transformers. Based on a complete set of onsite zero-sequence measurements taken in three power transformers, transformer zero-sequence performance is analyzed in relation to internal design features such as stabilizing winding position relative to high-voltage and low-voltage windings or the presence of magnetic shunts in the tank. Based on these measurements, this paper assesses the ability of various equivalent circuit models to reproduce zero-sequence performance accurately. A companion paper that complements this study evaluates the influence of stabilizing windings on tank overheating hazard and short-circuit duty in the event of asymmetrical faults. © 2016 Elsevier B.V. All rights reserved. 1. Introduction Delta stabilizing windings have been used since early electric power system development to avoid some of the network operation drawbacks of using wye connections in power transformers and autotransformers [1–3]. Utilization of stabilizing windings even became mandatory under some local regulations, and other external uses were also found for these windings [4,5]. Although the need for “critical” analysis of the decision to include a stabilizing winding in Yy-connected transformers [6–8], particularly in relation to three-phase three-legged transformers, was pointed out many years ago, many utilities still maintain this practice for reasons of “tradition” without analyzing the decision. Making an appropriate decision about the need for stabilizing windings requires deep understanding of the transformer’s zerosequence performance. Although many authors have studied zerosequence behavior and transformer modeling in detail [9–15], there is little information in technical literature providing an overview ∗ Corresponding author at: Architecture and Network Design Manager, Electrical Distribution Division, Gas Natural Fenosa, Avda. San Luis 77, Madrid 28033, Spain. E-mail addresses: aramosg@gasnatural.com, aramosgomez@gmail.com (A. Ramos) http://dx.doi.org/10.1016/j.epsr.2016.10.065 0378-7796/© 2016 Elsevier B.V. All rights reserved. of three-phase three-legged YNynd power transformer behavior depending on whether the stabilizing winding is closed or open. For all these reasons, in this paper (Part I) a complete set of zerosequence measurements was performed on three YNynd power transformers of different internal design under different operating conditions (with and without stabilizing winding) in order to evaluate the accuracy of several equivalent circuit models in predicting impedances and currents. In the second part of this study (Part II), presented in a companion paper, these results will be used to analyze tank overheating hazard and short-circuit duty in three-phase three-legged transformers. This information will be useful to design and planning engineers when conducting thorough assessment of the need for stabilizing windings. 2. Onsite zero-sequence measurements To analyze stabilizing windings’ influence on zero-sequence performance and its dependence on the windings’ relative position and on the presence of magnetic shunts, a complete set of tests was performed on three three-phase three-legged YNynd power transformers (see Table 1 and Fig. 1 for nameplate data and internal characteristics). These internal designs cover the vast majority of core-form construction types of power transformers. A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 33 Fig. 1. Schematic description of the internal construction design of the transformers measured. Table 1 Characteristics of transformers subject to zero-sequence measurements. Table 4 Results and calculations of zero-sequence measurements taken in transformer #2. Data Transformer #1 #2 #3 MVA kV Vector group Short-circuit impedance Inner winding Intermediate winding Outer winding Magnetic shunts 25/25/8.33 45/16.05/10 YNyn0 + d11 10.8% Stabilizing Low-voltage High-voltage NO 75/75/25 220/71/10 YNyn0 + d11 14.0% Stabilizing Low-voltage High-voltage YES 150/150/50 230/71/20 YNyn0 + d11 14.1% Low-voltage High-voltage Stabilizing NO Test code V (%) I1 (%) I2 (%) I3 (%) Z0 (%) HOO HOC HSO HSC LOO LOC LSO LSC (In Table 6) 0.136 0.171 0.110 (In Table 6) 0.055 0.115 0.039 (In Table 6) 0.699 1.258 0.821 – – 0.766 0.322 – – 1.223 0.931 (In Table 6) 1.171 0.839 1.218 – 0.695 – 0.164 – 1.160 – 0.893 135.29 19.41 13.63 13.45 142.30 4.68 13.76 3.24 Table 5 Results and calculations of zero-sequence measurements taken in transformer #3. Table 2 Set of zero-sequence measurements to be performed. Test number Test code HV winding LV winding Stabilizing winding 1 2 3 4 5 6 7 8 HOO HOC HSO HSC LOO LOC LSO LSC Energized Energized Energized Energized Open circuit Open circuit Short circuit Short circuit Open circuit Open circuit Short circuit Short circuit Energized Energized Energized Energized Delta open Delta close Delta open Delta close Delta open Delta close Delta open Delta close Table 3 Results and calculations of zero-sequence measurements taken in transformer #1. Test code V (%) I1 (%) I2 (%) I3 (%) Z0 (%) HOO HOC HSO HSC LOO LOC LSO LSC (In Table 6) 0.249 0.150 0.145 (In Table 6) 0.033 0.054 0.019 (In Table 6) 1.581 1.590 1.555 – – 0.503 0.225 – – 1.386 1.659 (In Table 6) 0.599 0.507 0.587 – 1.243 – 0.387 – 0.545 – 0.360 80.14 15.76 9.43 9.35 86.09 5.58 10.76 3.29 The internal design of transformer #1 (with inner stabilizing winding and no magnetic shunts) is typically employed in low- and medium-power YNynd transformers. When rated power is above 30–40 MVA, transformer designers include magnetic shields, as in transformer #2. For high-power transformers (above 100 MVA), three-winding YNynd transformers may include outer stabilizing windings, as in transformer #3 (with or without magnetic shields). As demonstrated in Ref. [16], accurate representation of the zero-sequence performance of three-phase three-legged YNynd transformers can be achieved by taking onsite low-voltage measurements, requiring 8 tests as indicated in Table 2. The results and calculations deriving from the tests performed on the three transformers in Table 1 are shown in Tables 3–5, which present measurements of voltage in the energized winding and of currents in the HV side (I1 ), LV side (I2 ) and stabilizing winding Test code V (%) I1 (%) I2 (%) I3 (%) Z0 (%) HOO HOC HSO HSC LOO LOC LSO LSC (In Table 6) 0.045 0.109 0.062 (In Table 6) 0.123 0.053 0.065 (In Table 6) 0.265 0.896 0.897 – – 0.366 0.502 – – 0.782 0.487 (In Table 6) 0.359 0.375 0.470 – 0.257 – 0.396 – 0.324 – 0.061 87.98 16.85 12.17 6.90 104.27 34.20 14.06 13.88 (I3 ). Voltage and current values are shown in percentage of base quantities (rated voltage and rated apparent power). Calculation of zero-sequence impedance is indicated in Eq. (1), Z0(ABC) = V I/3 (1) where (ABC) is the test code (e.g., HOO in test 1 in Table 2) and V and I are the measurements taken in the energized winding. Zero-sequence impedance modules are presented in percentages in Tables 3–5, calculated as indicated in Eq. (2), Z0(ABC) (%) = Z0(ABC) Zbase = V (%) I (%) (2) Relation between Eqs. (1) and (2) could be easily derived from well-known relations between rated and base quantities. As illustrated in Ref. [16], non-linear behavior of HOO and LOO measurements does not produce a major problem of model accuracy when predicting short-circuit currents. Consequently, to facilitate understanding of Tables 3–5 these tests consider average impedance values. All values measured in these tests are shown in Table 6. Some additional considerations about “no-load” tests (i.e. HOO and LOO measurements) can be found after Table 6. As indicated previously, an accurate representation of the zero-sequence performance of three-phase three-legged YNynd transformers can be achieved by means of low-voltage onsite measurements. With the exception of no-load tests, the rest of zerosequence impedances (i.e. HOC, HSO, HSC, LOC, LSO and LSC) show a good consistency between low-voltage onsite measurements and high-voltage factory tests [16,17]. This is an expected result as these 34 A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 Fig. 2. Nonlinear performance of ferromagnetic materials [19]. Table 6 Results and calculations of zero-sequence measurements taken in no-load tests. Transformer Test code V (%) I (%) #1 HOO 0.397 0.801 0.950 0.149 0.649 0.805 0.526 0.980 1.141 0.186 0.737 0.893 75.45 81.74 83.28 80.09 88.11 90.17 0.100 0.161 0.154 0.255 0.314 0.522 0.075 0.117 0.110 0.180 0.220 0.360 133.62 136.96 139.62 141.70 142.64 145.23 0.041 0.075 0.102 0.122 0.108 0.167 0.219 0.274 0.048 0.085 0.115 0.137 0.105 0.160 0.209 0.261 85.89 88.04 88.80 89.18 103.11 104.18 104.53 105.27 LOO #2 HOO LOO #3 HOO LOO Z0 (%) impedances are largely dominated by leakage fluxes with linear behavior [18]. In the case of “no-load” tests (i.e. HOO and LOO) of three-legged transformers, zero-sequence flux closes its path from the magnetic core to the tank through oil gaps and structural parts. This flux circulation path is significantly linearized due to the presence of non-ferromagnetic elements, but the non-linear effect of the tank steel magnetic permeability is still present as can be deduced from the dependence of impedance with voltage as shown in Table 6. Under no-load conditions (in the absence of delta winding), the transformer zero-sequence response is markedly influenced by the magnetic permeability of the tank steel. Actually, the measurements in Table 6 are fragments of a continuous dependence of no-load zero-sequence impedances versus applied voltage, which is qualitatively similar to that in Fig. 2 [19]. As this slightly non-linear behavior of the transformer suppose a source of error in HOO and LOO measurements, it must be checked if this error is a problem or not in order to obtain a sufficiently accurate representation of zero-sequence performance of the transformers in the calculation of short circuit currents (such as those in the companion paper [20]). These measurements mainly affect zero-sequence magnetizing impedance, whose importance when analyzing unbalanced loads and faults is expected to be much lower than that of the other zero-sequence impedances. In Ref. [17], a complete sensitivity analysis is carried out in order to evaluate actual implications of the uncertainty of the zero-sequence magnetizing impedance, concluding that on-site low-voltage measurements can be used to obtain a faithful representation of transformer zero-sequence behavior for steady-state short-circuit calculations. In some other calculations (i.e. tank losses due to unbalanced currents or inrush current calculations) a more detailed model taking into account non-linear behavior should be used [21], as linear equivalent circuits (as those proposed in Section 3) could not provide enough accuracy. 3. Calculation of zero-sequence equivalent circuit model parameters Once a complete set of measurements is available, the next step is to ascertain whether these measurements are suitable for establishing zero-sequence equivalent circuits that represent transformer performance when delta stabilizing windings are closed or open. Two approaches were considered: classic Ttype equivalent circuits whose simplicity usually makes this the option selected by engineers, and the more complex six-impedance equivalent circuit described in Ref. [10] as necessary for accurate determination of internal currents in three-winding YNynd transformers. 3.1. Three-impedance (T-type) equivalent circuit models Utilization of T-type equivalent circuits in transformers is mandatory in commercial power system analysis tools used by protection, operation and planning engineers. For this reason, several types of T-type equivalent circuits for YNynd transformers will be analyzed in order to ascertain the best alternative. The first alternative to be considered for the zero-sequence equivalent circuit of the transformer (model A) is based on the model proposed by IEC standard 60076-8 [22], and considers the equivalent circuit shown in Fig. 3. This circuit has a branch in parallel with the magnetizing branch, so when the delta winding is closed, current flows in both impedances. If the delta winding is open, current flows through the magnetizing impedance only. A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 35 Table 7 Zero-sequence impedance (T-type) calculation results for transformer #1. Zero-sequence equiv. circuit (model A) Zero-sequence equiv. circuit (model B1) Zero-sequence equiv. circuit (model B2) Impedance Z0 (%) Impedance Z0 (%) Impedance Z0 (%) Z01 Z02 Z03 Z0M QME = 8.82% 10.08 −0.20 6.07 78.38 Z 01 Z’02 Z’03 – QME = 0.16% 9.79 −0.42 5.99 – Z”01 Z”02 – Z”0M QME = 1.51% 1.08 9.53 – 77.84 Fig. 3. T-type zero-sequence equivalent circuit model A (switch S is open when delta is open). Fig. 5. Six-impedance zero-sequence separate equivalent circuit (model C). Fig. 4. T-type zero-sequence separate equivalent circuits (model B). The second alternative (model B) is based on IEEE standard C57.12.90 [23] and considers two different T-type equivalent circuits for the YNynd transformer depending on whether the delta stabilizing winding is closed or open (Fig. 4). The impedances of the zero-sequence equivalent circuits in Figs. 3 and 4 were calculated from the zero-sequence impedance measurements presented in Tables 3–5. To obtain the circuit parameters in model B1 (Fig. 4—B1), measurements HOC, HSC, LOC and LSC were used, while measurements HOO, HSO, LOO and LSO were used for the circuit in model B2 (Fig. 4—B2). As the number of measurements is higher than that of the impedances, an optimization process based on the Levenberg–Marquardt algorithm [24] was performed. Levenberg–Marquardt algorithm mixes the Gauss–Newton method and the gradient descendent method to improve the convergence of the problem. In the optimization process, the objective was to minimize the quadratic mean error (QME) between the measured impedances (shown in Tables 3–5) and those obtained from the equivalent circuit. The equations used in the optimization process for each model are detailed in the Appendix A. The results of calculation of the zero-sequence impedances of the equivalent circuits are shown in Tables 7–9. The QME is also indicated in the tables. Resistive components of the measurements were ignored, as their influence on the results is not relevant [16]. 3.2. Six-impedance equivalent circuit model As indicated previously, Garin states [10] that an abbreviated equivalent circuit (T-type) is sufficient for system calculations, but that the completed equivalent circuit (six branches) is required to calculate the current circulating in the delta stabilizing winding. To verify that statement and ascertain the veracity of the currents predicted by the T-type and six-branch equivalent circuit models, a third alternative is proposed, as indicated in Fig. 5. In this equivalent circuit, the stabilizing winding is represented by a branch with a switch S that is closed when the delta winding is closed. In the same way as stated above for T-type equivalent circuits, the impedances of the zero-sequence equivalent circuit shown in Fig. 5 were calculated from zero-sequence impedance measurements. Optimization based on the Levenberg–Marquardt algorithm [24] was applied to Eqs. (A.17)–(A.24) shown in the Appendix A. Table 10 shows the results of the zero-sequence impedance calculations and the QME. 4. Analysis of results This section compares the ability of the different zero-sequence equivalent circuits to reproduce transformer behavior accurately. For this purpose, and for each test configuration, the predicted impedances and currents obtained from the various equivalent circuit models will be compared with real measurements. It should be noted in Tables 7–10 that some impedances could be negative as a result of the mathematical transformations used to obtain the models, without representing capacitive effects. 4.1. Models’ accuracy in predicting impedance In Section 3, the overall appropriateness of the different equivalent circuits was assessed by means of the QME obtained when performing the optimization process to obtain the models’ impedances. Table 11 summarizes the QME values. For model B, the average value of models B1 and B2 is shown. The results summarized in Table 11 show that model B offers greater accuracy (QME below 1%). Model C also presents quite low QME values (in the 1–3% range). Conversely, model A presents 36 A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 Table 8 Zero-sequence impedance (T-type) calculation results for transformer #2. Zero-sequence equiv. circuit (model A) Zero-sequence equiv. circuit (model B1) Zero-sequence equiv. circuit (model B2) Impedance Z0 (%) Impedance Z0 (%) Impedance Z0 (%) Z01 Z02 Z03 Z0M QME = 5.32% 14.39 −0.45 5.26 131.87 Z’01 Z’02 Z’03 – QME = 0.15% 14.13 −0.61 5.28 – Z”01 Z”02 – Z”0M QME = 1.03% 4.96 9.12 – 131.70 Table 9 Zero-sequence impedance (T-type) calculation results for transformer #3. Zero-sequence equiv. circuit (model A) Zero-sequence equiv. circuit (model B1) Zero-sequence equiv. circuit (model B2) Impedance Z0 (%) Impedance Z0 (%) Impedance Z0 (%) Z01 Z02 Z03 Z0M QME = 1.15% −1.54 15.73 23.12 89.34 Z’01 Z’02 Z’03 – QME = 0.22% −1.59 15.65 18.48 – Z”01 Z”02 – Z”0M QME = 0.64% −0.46 14.61 – 88.99 Table 10 Zero-sequence impedance (6-impedances) calculation results for transformers #1, #2 and #3. Zero-sequence equiv. circuit (6-impedances) Impedance Transformer #1 Z0 (%) Transformer #2 Z0 (%) Transformer #3 Z0 (%) Z01 Z02 Z03 Z012 Z013 Z023 QME 73.35 −204.26 229.94 8.35 −39.07 5.19 2.54% 177.07 −82.58 67.49 11.90 −67.78 4.31 1.17% 834.42 579.08 102.77 12.64 15.09 −107.95 1.26% Table 11 Comparison of the different models’ quadratic mean error. Model A B C Quadratic mean error (QME) Transformer #1 Transformer #2 Transformer #3 8.82% 0.83% 2.54% 5.32% 0.59% 1.17% 1.15% 0.43% 1.26% greater dispersion in the different transformers, producing values above 5% in transformer #1 and #2. Despite being topologically quite similar, the accuracy of models A and B are very different. As it was indicated, the main difference between models A and B is that while in model A the same impedances Z01 and Z02 represent the behavior of a YNynd transformer in all conditions, model B uses different impedances in the series branches (Z 01 different to Z 01 and Z 02 different to Z 02 ) to represent the behavior of a YNynd transformer whether stabilizing winding is open or closed. The underlying physical reason behind the difference in accuracy of models A and B is that in a three-legged core-type wye–wye transformer, when calculating open-circuit zero-sequence impedances, the tank acts as if it were a high-impedance delta-connected outermost winding [10]. On the contrary, in a three-winding YNynd transformer this effect is not present due to the delta stabilizing winding. In the case of transformers #1 and #2, model B1 represents the zero-sequence equivalent circuit of a wye-wye transformer with an innermost delta (real) winding and model B2 represents the zero-sequence equivalent circuit of a wye-wye transformer with an outermost delta (virtual) winding. In this case, leakage fluxes trajectories are quite different and this is the reason why Z 01 is so different to Z 01 and Z 02 is so different to Z 02 . As model A is not capable to represent accurately both situations, QME in model A is significantly higher than in model B. On the other hand, in the case of transformer #3, due to its internal design, both the stabilizing winding and the tank when acts as a virtual delta winding are positioned as the outermost winding. In this case, leakage fluxes trajectories when stabilizing winding is closed or open are more similar and the differences in QME of model A and B are not too high. To provide more detailed information about impedance prediction errors in each test configuration, Table 12 shows the impedance values obtained in each measurement and the relative error of the predicted impedances of the different equivalent circuit models. As revealed in Ref. [16], the errors are normally higher in no-load configurations due to transformers’ non-linear behavior, without significantly affecting zero-sequence performance analysis. The conclusions drawn about the different models from Table 11 can be extrapolated to the results in Table 12. 4.2. Accuracy of the different models’ current prediction As explained previously, a T-type equivalent circuit model is expected to be sufficiently accurate for system calculations but not for internal current prediction. However, a more complex model (with at least six branches) is expected to offer more accurate current prediction. The aim of this section is to verify the current prediction accuracy of the different equivalent circuits for both external (primary and secondary windings) and internal (stabilizing winding) currents. Table 13 shows each model’s average error in primary and secondary current prediction for the different test configurations, and Table 14 shows the mean error in stabilizing winding current prediction. Tables 15–17 show detailed winding current values obtained in each measurement and the relative error (in relation to measurement) of the predicted currents for the different equivalent circuit models. As expected, in model C current prediction accuracy remains good (error less than 3–5%) for both internal and external currents. Conversely, equivalent circuit A made poor predictions not only for internal but also for external currents, especially in one of the transformers. Meanwhile, model B offers good predictions for external currents and good predictions for delta winding currents in about 75% of cases. The reason why model B has less accuracy in predicting delta winding currents than model C is related with tank A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 37 Table 12 Comparison of the different models’ impedance prediction. Test code Model Transformer #1 Transformer #2 Transformer #3 Z0 (%) Error (%) Z0 (%) Error (%) HOO Measured A B C 80.14 88.46 78.92 77.25 – 10.38 1.52 3.60 135.29 146.26 136.66 136.85 – 8.11 1.01 1.15 87.98 87.80 88.53 89.01 – 0.20 0.63 1.17 HOC Measured A B C 15.76 15.71 15.78 16.36 – 0.29 0.13 3.80 19.41 19.45 19.41 19.34 – 0.20 0.00 0.34 16.85 16.83 16.89 16.91 – 0.14 0.24 0.35 HSO Measured A B C 9.43 9.88 9.57 9.62 – 4.77 1.49 2.02 13.63 13.94 13.49 13.52 – 2.26 1.03 0.84 12.17 11.84 12.09 12.38 – 2.75 0.66 1.72 HSC Measured A B C 9.35 9.87 9.34 9.28 – 5.59 0.12 0.76 13.45 13.90 13.44 13.35 – 3.32 0.07 0.77 6.90 6.93 6.88 6.82 – 0.48 0.23 1.13 LOO Measured A B C 86.09 78.18 87.37 88.26 – 9.19 1.49 2.52 142.30 131.42 140.82 140.65 – 7.65 1.04 1.16 104.27 105.07 103.60 102.28 – 0.77 0.64 1.90 LOC Measured A B C 5.58 5.43 5.57 5.73 – 2.62 0.18 2.73 4.68 4.61 4.67 4.77 – 1.53 0.21 1.90 34.20 34.10 34.13 34.63 – 0.30 0.20 1.26 LSO Measured A B C 10.76 8.73 10.60 10.99 13.76 12.52 13.90 13.89 – 8.98 1.02 0.95 14.06 14.16 14.15 14.23 – 0.73 0.62 1.18 LSC Measured A B C 3.29 3.41 3.30 3.25 3.24 3.29 3.23 3.29 – 1.63 0.19 1.55 13.88 14.05 13.91 13.97 – 1.22 0.22 0.66 – 18.85 1.53 2.14 – 3.77 0.19 1.17 Table 13 Comparison of the different models’ mean errors in primary and secondary current prediction. Model A B C Quadratic mean error (QME) Transformer #1 Transformer #2 Transformer #3 7.7% 0.8% 2.3% 3.8% 1.3% 1.7% 1.2% 0.8% 1.3% Table 14 Comparison of the different models’ mean errors in stabilizing winding current prediction. Model A B C Quadratic mean error (QME) Transformer #1 Transformer #2 Transformer #3 29.2% 27.0% 2.3% 16.0% 9.3% 2.2% 23.0% 11.4% 2.0% current circulation when zero-sequence voltages are applied to the transformer [10]. For example, in case of zero-sequence voltages applied to HV winding, HV ampere-turns should be balanced with LV ampere-turns, stabilizing winding ampere-turns and ampereturns from tank currents. This last term (ampere-turns from tank currents) is not taken into account by model B, as this is a T-type model (see Fig. 4—B1). Z0 (%) Error (%) 5. Conclusions Differences in the zero-sequence performance of three-phase three-legged YNynd power transformers when the stabilizing winding is closed and when it is open is a key factor in assessing the need for this winding. This performance is determined by zero-sequence flux circulation inside the transformer under different network operating conditions, meaning that internal design features such as the relative position of the windings (HV, LV and stabilizing) or the presence of magnetic shields in the tank are of great importance. This paper proposed taking a complete set of onsite low-voltage zero-sequence measurements to obtain overall information about the zero-sequence performance of the three most frequent design types found in core-form power transformers, complementing the results published by the authors in Ref. [16]. Based on these measurements, the parameters of different equivalent circuits were calculated using a set of equations and an optimization process. These circuit models comprised two T-type equivalent circuits (the simpler option commonly used in representation of transformers in power system analysis tools) and a more complex six-branch equivalent circuit. For the T-type models, the model whose parameters are different depending on whether the stabilizing winding is closed or open was more accurate than the alternative with common parameters in all cases. Separate T-type zero-sequence equivalent circuits usually produce a complete and sufficiently accurate description of the zero-sequence behavior of YNynd transformers for all stabilizing 38 A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 Table 15 Comparison of the different models’ current prediction for transformer #1. Test Code Model Current prediction for transformer #1 I1 (%) Error (%) I2 (%) Error (%) I3 (%) Error (%) HOC Measured A B C 1.581 1.586 1.579 1.523 – 0.33 0.09 3.62 – – – – – – – – 1.243 1.472 1.579 1.232 – 18.39 27.02 0.91 HSO Measured A B C 1.590 1.517 1.566 1.558 – 4.58 1.49 2.01 1.386 1.521 1.395 1.364 – 9.74 0.67 1.60 – – – – – – – – HSC Measured A B C 1.555 1.473 1.557 1.567 – 5.27 0.15 0.79 1.659 1.527 1.674 1.741 – 7.93 0.96 4.99 0.387 0.050 0.117 0.372 – 87.00 69.66 3.84 LOC Measured A B C – – – – – – – – 0.599 0.617 0.601 0.584 – 2.86 0.35 2.49 0.545 0.572 0.601 0.550 – 4.99 10.36 0.95 LSO Measured A B C 0.503 0.553 0.507 0.496 – 10.06 0.96 1.31 0.507 0.624 0.514 0.496 – 23.19 1.52 2.14 – – – – – – – – LSC Measured A B C 0.225 0.203 0.222 0.231 – 9.92 1.22 2.73 0.587 0.565 0.586 0.594 – 3.65 0.21 1.16 0.360 0.337 0.363 0.372 – 6.45 0.96 3.35 Table 16 Comparison of the different models’ current prediction for transformer #2. Test code Model Current prediction for transformer #2 I1 (%) Error (%) I2 (%) Error (%) I3 (%) Error (%) HOC Measured A B C 0.699 0.698 0.699 0.701 – 0.19 0.00 0.34 – – – – – – – – 0.695 0.671 0.699 0.670 – 3.48 0.56 3.58 HSO Measured A B C 1.258 1.230 1.271 1.269 – 2.23 1.02 0.83 1.223 1.235 1.189 1.188 – 0.96 2.77 2.84 – – – – – – – – HSC Measured A B C 0.821 0.794 0.821 0.827 – 3.24 0.05 0.75 0.931 0.872 0.929 0.928 – 6.32 0.24 0.34 0.164 0.075 0.107 0.163 – 54.56 34.66 0.80 LOC Measured A B C – – – – – – – – 1.171 1.189 1.173 1.149 – 1.58 0.23 1.84 1.160 1.144 1.173 1.181 – 1.38 1.19 1.83 LSO Measured A B C 0.766 0.831 0.800 0.800 – 8.48 4.48 4.41 0.839 0.921 0.830 0.831 – 9.83 1.04 0.98 – – – – – – – – LSC Measured A B C 0.322 0.311 0.331 0.331 – 3.47 2.80 2.70 1.218 1.197 1.218 1.198 – 1.78 0.01 1.70 0.893 0.851 0.887 0.914 – 4.60 0.62 2.43 winding operation options. Nevertheless, in some cases, stabilizing winding current prediction showed errors, though of slight significance. It should be noted that in case of no load condition and stabilizing winding open, non-linearity of magnetizing impedances can introduce a certain error in the use of the models. The six-impedance equivalent circuit supposes greater complexity both in obtaining the parameters and in calculating circuit currents. Nevertheless, this option offers greater accuracy when a precise evaluation of internal transformer currents (especially circulating current inside the delta stabilizing winding) is required. These experimental data and results will be of great use in analysis of tank overheating hazard and short-circuit duty in three-phase three-legged YNynd power transformers, which will be addressed in the companion paper (Part II) to this study. A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 39 Table 17 Comparison of the different models’ current prediction for transformer #3. Test code Model Current prediction for transformer #3 I1 (%) Error (%) I2 (%) Error (%) I3 (%) Error (%) HOC Measured A B C 0.265 0.265 0.264 0.264 – 0.13 0.24 0.36 – – – – – – – – 0.257 0.211 0.264 0.250 – 18.07 2.75 2.76 HSO Measured A B C 0.896 0.921 0.902 0.880 – 2.80 0.64 1.72 0.782 0.783 0.774 0.762 – 0.18 0.93 2.51 – – – – – – – – HSC Measured A B C 0.897 0.893 0.899 0.907 – 0.44 0.27 1.18 0.487 0.481 0.487 0.490 – 1.21 0.02 0.60 0.396 0.327 0.412 0.410 – 17.39 4.10 3.56 LOC Measured A B C – – – – – – – – 0.359 0.360 0.359 0.354 – 0.28 0.19 1.26 0.324 0.286 0.359 0.325 – 11.76 10.97 0.38 LSO Measured A B C 0.366 0.379 0.375 0.369 – 3.70 2.56 0.92 0.375 0.373 0.373 0.371 – 0.64 0.53 1.09 – – – – – – – – LSC Measured A B C 0.502 0.507 0.513 0.516 – 1.01 2.26 2.86 0.470 0.464 0.469 0.467 – 1.21 0.22 0.66 0.061 0.034 0.044 0.060 – 44.87 27.90 1.31 Z0(HOO) = Z 01 + Z 0M Acknowledgement The authors would like to thank Miguel Angel Cardiel, from Universidad Carlos III de Madrid, for performing equivalent circuit calculations. Z0(HSO) = Z Z0(LOO) = Z Z0(LSO) = Z 01 02 02 +Z +Z +Z (A.13) 02 //Z 0M (A.14) 0M (A.15) 01 //Z 0M (A.16) Appendix A. - Alternative C equivalent circuit (Fig. 5): In this section, the equations that allow transition from measured quantities to equivalent circuit impedances are presented for each model. For simplicity, the development of shunt impedances is not shown. Z0(HOO) = Z01 // Z01Y + (Z02Y + Z02 ) // (Z03Y ) Z0(HSC) = Z01 // Z01Y + (Z02Y ) // (Z03Y + Z03 ) (A.1) Z0(HOC) = Z01 + Z0M //Z03 (A.2) Z0(LOO) = Z02 // Z02Y + (Z01Y + Z01 ) // (Z03Y ) Z0(HSO) = Z01 + Z0M //Z02 (A.3) Z0(LOC) = Z02 // Z02Y + (Z01Y + Z01 ) // (Z03Y + Z03 ) Z0(HSC) = Z01 + Z0M //Z02 //Z03 (A.4) Z0(LOO) = Z02 + Z0M (A.5) Z0(LSO) = Z02 + Z0M //Z01 (A.6) Z0(LSO) = Z02 + Z0M //Z01 (A.7) Z0(LSC) = Z02 + Z0M //Z01 //Z03 (A.8) Z0(LSO) = Z02 // Z02Y + (Z01Y ) // (Z03Y ) Z0(LOC) = Z02 + Z03 (A.11) Z0(LSC) = Z02 + Z01 //Z03 (A.12) - Alternative B2 equivalent circuit (Fig. 4—B2): (A.21) (A.22) (A.23) (A.24) Z01Y = Z012 · Z013 Z012 + Z013 + Z023 (A.25) Z02Y = Z012 · Z023 Z012 + Z013 + Z023 (A.26) Z03Y = Z013 · Z023 Z012 + Z013 + Z023 (A.27) (A.9) (A.10) (A.20) where impedances Z01Y − Z02Y − Z03Y are corresponding startriangle transformation from Z012 − Z013 − Z023 : - Alternative B1 equivalent circuit (Fig. 4—B1): Z0(HSC) = Z01 + Z02 //Z03 Z0(LSC) = Z02 // Z02Y + (Z01Y ) // (Z03Y + Z03 ) (A.18) (A.19) Z0(HOO) = Z01 + Z0M Z0(HOC) = Z01 + Z03 (A.17) Z0(HOC) = Z01 // Z01Y + (Z02Y + Z02 ) // (Z03Y + Z03 ) Z0(HSO) = Z01 // Z01Y + (Z02Y ) // (Z03Y ) - Alternative A equivalent circuit (Fig. 3): References [1] L.F. Blume, Influence of transformers connections on operation, AIEE Trans. 33 (May) (1914) 753–770. 40 A. Ramos, J.C. Burgos / Electric Power Systems Research 144 (2017) 32–40 [2] J.F. Peters, Harmonics in transformer magnetizing currents, AIEE Trans. 34 (September) (1915) 2157–2182. [3] L.N. Robinson, Phenomena accompanying transmission with some types of star transformer connections, AIEE Trans. 34 (September) (1915) 2183–2195. [4] J.F. Peters, M.E. Skinner, Transformers for interconnecting high-voltage transmission systems for feeding synchronous condensers from a tertiary winding, AIEE Trans. 40 (June) (1921) 1181–1199. [5] J. Mini Jr, L.J. Moore, R. Wilkins, Performance of auto transformers with tertiaries under short-circuit conditions, AIEE Trans. 42 (October) (1923) 1060–1068. [6] R.O. Kapp, A.R. Pearson, The performance of star–star transformers, J. Inst. Electr. Eng. 1 (January (6)) (1955) 9–12. [7] B.A. Cogbill, Are stabilizing windings necessary in all Y-connected transformers? AIEE Trans. Power Appar. Syst. 78 (October (3)) (1959) 963–970. [8] O.T. Farry, Tertiary windings in autotransformers, AIEE Trans. Power Appar. Syst. 80 (April (3)) (1961) 78–82. [9] A.N. Garin, Zero-phase sequence characteristics of transformers. Part I: sequence impedances of a static symmetrical three-phase circuit and of transformers, Gen. Electr. Rev. 43 (March (3)) (1940) 131–136. [10] A.N. Garin, Zero-phase sequence characteristics of transformers. Part II: equivalent circuits for transformers, Gen. Electr. Rev. 43 (April (4)) (1940) 174–179. [11] K. Schlosser, Die Nullimpedanzen des Voll- und des Spartransformatoren (Zero-sequence impedance in transformers and autotransformers), Brown-Boveri-Nachr. 44 (February) (1962) 78–83 (in German). [12] M. Christoffel, Zero-sequence reactances of transformers and reactors, Brown Boveri Rev. 52 (November/December (11/12)) (1965) 837–842. [13] K.P. Oels, Ersatzschaltungen des Transformators für das Nullsystem (Zero-Sequence Equivalent Circuits for Transformers) ETZ-A Bd, 89, 1968, pp. 59–62 (in German). [14] R. Allcock, S. Holland, L. Haydock, Calculation of zero-phase sequence impedance for power transformers using numerical methods, IEEE Trans. Magn. 31 (May (3)) (1995) 2048–2051. [15] T. Ngnegueu, M. Mailhot, A. Munar, Zero-phase impedance and tank heating model for three-phase three-leg core type transformers coupling magnetic field and electric circuit equations in a finite element software, IEEE Trans. Magn. 31 (May (3)) (1995) 2068–2071. [16] A. Ramos, J.C. Burgos, et al., Determination of parameters of zero-sequence equivalent circuits for three-phase three-legged YNynd transformers based on onsite low-voltage tests, IEEE Trans. Power Deliv. 28 (July (3)) (2013) 1618–1625. [17] A. Ramos, Consideraciones acerca de la Utilización de Arrollamientos de Estabilización en Transformadores Estrella-Estrella (in Spanish). Pd. D. Dissertation, Universidad Carlos III de Madrid, 2016. [18] M.F. Lachman, Y.N. Shafir, Influence of single-phase excitation and magnetizing reactance on transformer leakage reactance measurement, IEEE Trans. Power Deliv. 12 (October (4)) (1997) 1538–1546. [19] S.V. Kulkarni, S.A. Khaparde, Transformer engineering, in: Design and Practice, Marcel Dekker, 2004. [20] A. Ramos, J.C. Burgos, Influence of stabilizing windings on zero-sequence performance of three-phase three-legged YNynd transformers. Part II: tank overheating hazard and short-circuit duty, Electr. Power Syst. Res. XXXX. (in revision). [21] N. Chiesa, B.A. Mork, H.K. Høidalen, Transformer model for inrush current calculations: simulations, measurements and sensitivity analysis, IEEE Trans. Power Deliv. 25 (October (4)) (2010) 2599–2608. [22] IEC Std. 60076-8, Power Transformers, Part 8: Application Guide. 1997. [23] IEEE Std. C57.12.90, IEEE Standard Test Code for Liquid-Immersed Distribution, Power and Regulating Transformers, 2010. [24] D. Marquardt, An algorithm for least-squares estimation of nonlinear parameters, J. Soc. Ind. Appl. Math. 11 (2) (1963) 431–441.