UNIVERSIDAD CATÓLICA
DE SANTA MARIA
d
TEMA: CRITERIO DE ESTABILIDAD
DE JURY Y MAPEO DEL PLANO S AL
Z
DOCENTE:
➢ QUISPE CACCHUCO, MARCEL JAIME
ALUMNO:
➢ CUETO QUICHCA, BRAYAN
SEMESTRE: VIII
GRUPO: “4”
AQP-2023
0
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
ÍNDICE
PRACTICA 7: CRITERIO DE ESTABILIDAD DE JURY Y MAPEO DEL PLANO S AL
Z...................................................................................................................................................2
1.
OBJETIVOS DIDACTICOS:............................................................................................2
2.
DESCRIPCION DE LA TAREA A RESOLVER: ............................................................2
3.
MEDIOS AUXILIARES:...................................................................................................2
4.
MARCO TEÓRICO: .........................................................................................................2
4.1 CRITERIO DE ESTABILIDAD JURY: .........................................................................2
4.2 LA PRUEBA DE ESTABILIDAD DE JURY: ................................................................2
4.3. Función polar del MATLAB:..........................................................................................4
4.4 MAPEO DEL PLANO S AL PLANO Z ..........................................................................4
➢
4.5 ANALIZANDO LOS CASOS DE MAPEO: ...........................................................5
5. DESCRIPCIÓN DE LA TAREA A RESOLVER: ................................................................7
5.1 Analizar la estabilidad de sistema realimentado de la Figura 1 ....................................7
5.2 EJEMPLO 4. Dado el siguiente sistema: ......................................................................13
5.3 EJEMPLO 4: dado el siguiente sistema ........................................................................17
5.4 Ejemplo 4. Considere las regiones en el plano s que se muestran en la figura ...........23
5.5 Consideremos los polos en el plano s .............................................................................29
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
1
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
PRACTICA 7: CRITERIO DE ESTABILIDAD DE JURY Y MAPEO DEL PLANO S AL
Z
1. OBJETIVOS DIDACTICOS:
• Comprobar con la simulación en MATLAB la validez del intervalo de estabilidad de la
ganancia K, obtenida por el método de Jury
• Realizar el mapeo del plano s al plano z de unos puntos particulares y de algunas regiones
2. DESCRIPCION DE LA TAREA A RESOLVER:
• Dado los siguientes sistemas, se desea un script en MATLAB para cada uno de los
problemas
• Realizar el mapeo del plano s al plano z usando Matlab
• Elaborar un informe y enviarlo por el aula virtual
3. MEDIOS AUXILIARES:
•
PC con sofware MATLAB
4. MARCO TEÓRICO:
4.1 CRITERIO DE ESTABILIDAD JURY:
Es un método para saber si las raíces de un polinomio están dentro, fuera o en el círculo
unidad, sin necesidad de calcular dichas raíces. Uno de los temas más importantes dentro
de la teoría de control es el análisis de la estabilidad de los sistemas, ya que uno de los
primeros objetivos que se pretenden alcanzar al diseñar un sistema de control, es que
dicho sistema sea estable. Se dice que un sistema discreto es estable si, ante cualquier
secuencia de entrada acotada, la secuencia de salida es también acotada. Si existe alguna
secuencia acotada de entrada ante la cual la secuencia de salida no lo es, el sistema será
inestable
4.2 LA PRUEBA DE ESTABILIDAD DE JURY:
Al aplicar la prueba de estabilidad de Jury a una ecuación característica dada P(z)=0,
construimos una tabla cuyos elementos se basan en los coeficientes de P(z). Un sistema
con la ecuación característica dada
P(z)=0 𝑃(𝑧) = 𝑎0𝑧 𝑛 + 𝑎1𝑧 𝑛−1 + ⋯ + 𝑎𝑛−1𝑧 + 𝑎𝑛,
donde 𝑎0 > 0, es estable, si todas las condiciones siguientes se satisfacen (Ogata):
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
2
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 1 forma general de la tabla de estabilidad de
JURY
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
3
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
4.3. Función polar del MATLAB:
Figura 2 Funcionamiento de la función polar en MATLAB
4.4 MAPEO DEL PLANO S AL PLANO Z
El mapeo del plano s al plano z viene dado por la relación:
𝑧 = 𝑒 𝑇𝑠 (9.11)
Donde los polos en el plano-s en el eje imaginario tienen la forma.
𝑠 = 𝜎 ± 𝑗𝑤 (9.12)
Remplazando (9.11) en (9.12) obtenemos:
𝑧 = 𝑒 (𝜎±𝑗𝑤)𝑇 (9.13)
La expresión dada en (9.13) nos conduce a representar en forma fasorial (magnitud y
fase) de la siguiente forma:
𝑧 = 𝑟∠±θ (9.14)
Donde 𝑟 = 𝑒 𝜎𝑇 y 𝜃 = ±𝑤𝑇
Estas relaciones son representadas en el círculo unitario como se muestra en la Figura 2.
Figura 3 Circulo unitario
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
4
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
➢ 4.5 ANALIZANDO LOS CASOS DE MAPEO:
Primer Caso: El mapeo para s=0 y Z=e^(0T)=1 es mostrado en la figura 4
Figura 4 Primer caso de mapeo
Segundo caso: El mapeo para s=+jw y z=e^(jwT) para un periodo de muestreo
T=1 segundo y frecuencia w=0.05. El mapeo puede observarse en la figura 5
Figura 5 Segundo caso de mapeo
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
5
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Tercer Caso:
Figura 6 Componentes para el amortiguamiento
constante
Figura 7 Curva en el plano Z para el 𝜉 constante
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
6
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 8 Curva en el plano Z para el 𝜉 constante
5. DESCRIPCIÓN DE LA TAREA A RESOLVER:
5.1 Analizar la estabilidad de sistema realimentado de la Figura 1 , utilizando
el criterio de magnitud para un período de muestreo de T = 1s y para diferentes valores
de ganancia de compensación.
Figura 9 Sistema realimentado discreto
Pruebe con Kp=1 , 2 y 3 y lo puede hacer en simulink y también en un script de Matlab.
➢ Usamos el artificio llamado discrete filter para que nuestro sistema se discretice si no hay
este artificio no se va poder discretizar y se como si fuera un sistema continuo en el tiempo
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
7
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 10 Generamos el diagrama de bloques en SIMULINK
Figura 11 Aplicamos el periodo de muestro en ZOH Ts =1
Figura 12 Scope mostrando la respuesta del sistema discreto ante una entrada
escalón unitario con K=1 es casi estable
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
8
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
K=2
Figura 13 Generemos el diagrama discreto de bloques con K=2
Figura 14 Respuesta del sistema discreto con una ganancia de K=2 es casi
inestable
K=3
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
9
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 15 Generemos el diagrama de bloques con K=3
Figura 16 Respuesta del sistema discreto con una ganancia de K=3 es inestable
completamente
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
10
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
CODIGO EN MATLAB
CODIGO PARA K=1
➢ K=1
clear; close all; clc
T=0.1;
G=tf(1,[1 1 0]);
Gzoh_z=c2d(G,T,'zoh');
kp=1;
D_z=kp;
Gla=series(D_z,Gzoh_z);
Glc=feedback(Gla,1);
step(Glc)
Figura 17 Respuesta del sistema discreto con una ganancia de K=1 es inestable
completamente ante una entrada escalón unitario
CODIGO PARA K=2
➢ K=2
clear; close all; clc
T=0.1;
G=tf(1,[1 1 0]);
Gzoh_z=c2d(G,T,'zoh');
kp=2;
D_z=kp;
Gla=series(D_z,Gzoh_z);
Glc=feedback(Gla,1);
step(Glc)
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
11
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 18 Respuesta del sistema discreto con una ganancia de K=2 es inestable
completamente ante una entrada escalón unitario
CODIGO PARA K=3
➢ K=3
clear; close all; clc
T=0.1;
G=tf(1,[1 1 0]);
Gzoh_z=c2d(G,T,'zoh');
kp=3;
D_z=kp;
Gla=series(D_z,Gzoh_z);
Glc=feedback(Gla,1);
step(Glc)
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
12
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 19 Respuesta del sistema discreto con una ganancia de K=3 es inestable
completamente ante una entrada escalón unitario
5.2 EJEMPLO 4. Dado el siguiente sistema:
Figura 20 Diagrama de bloques del sistema discreto
Compruebe el intervalo de estabilidad para k
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
13
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 21 Intervalo de estabilidad para K
GENERAMOS EL DISGRAMA DE BLOQUES EN SIMULINK
Figura 22 Realizamos el diagrama de bloques en simulink del sistema discreto
Figura 23 Visualización del scope la respuesta del sistema discreto cuando K=1
es inestable
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
14
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 24 Digrama de bloques del sistema discreto con K=0.001
Figura 25 Respuesta del sistema discreto cuando K=0.001 es estable
CODIGO
CUANDO ES ESTABLE
clear; close all; clc
T=0.1;%periodo de muestreo
G_z=tf(5,[1 -1.6 0.63],T);%funcion de transderencia
k=0.001;% la ganancia cuando es estable
D_z=k*tf([1 0],[1 -1],T);%funcion de tranferencia antes de la planta
Gla=series(D_z,G_z);%multiplicacion de bloques
Glc=feedback(Gla,1);%relalimentacion unitaria
figure(2)
step(Glc)%respuesta ante una entrada escalon unitario
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
15
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 26 Respuesta del sistema discreto cuando K=0.001 es estable ante una
entrada escalón unitario
CUANDO ES INESTABLE
clear; close all; clc
T=0.1;%periodo de muestreo
G_z=tf(5,[1 -1.6 0.63],T);%funcion de transderencia
k=0.1;% la ganancia cuando es INESTABLE
D_z=k*tf([1 0],[1 -1],T);%funcion de tranferencia antes de la planta
Gla=series(D_z,G_z);%multiplicacion de bloques
Glc=feedback(Gla,1);%relalimentacion unitaria
figure(2)
step(Glc)%respuesta ante una entrada escalon unitario
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
16
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 27 Respuesta del sistema discreto cuando K=0.1 es inestable ante una
entrada escalón unitario
5.3 EJEMPLO 4: dado el siguiente sistema
Figura 28 Diagrama de bloques con realimentación unitaria
Compruebe el intervalo de estabilidad para K.
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
17
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 29 Estabilidad de K
Figura 30 generamos el stop time en 10 segundos
Figura 31 configuramos el sample time del escalon
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
18
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 32 Realizamos el diagrama de bloques en simulink
Figura 33 Respuesta del sistema cuando K=0.5 es estable
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
19
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 33 Realizamos el diagrama de bloques en simulink k=1
Figura 34 Respuesta del sistema cuando K=1 es inestable
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
20
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
CODIGO EN MATLAB
clear all, close all,clc
T=0.1; % periodo de muestreo
K=input('Ingrese el valor de K=')
num=[1 0.5];
den=[1 -0.5 -1 0.5];
G=tf(num,den,T) % planta discretizada
num2=K;
den2=[1];
Gc=tf(num2,den2,T) % planta discretizada
% Función de transferencia directa
Gla=series(Gc,G)
Glcz=feedback(Gla,1)
step(Glcz)
Figura 35 insertamos k=0.5 en el command Windonw
Figura 36 vemos los resultados de la función de transferencia con el k ya
implementado
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
21
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 37 Vemos las respuesta al step del sistema con K=0.5 que es estable
Figura 38 Insertamos en el command Windonw K=2
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
22
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 39 Vemos la respuesta al step del sistema con K=2 que es inestable
5.4 Ejemplo 4. Considere las regiones en el plano s que se muestran en la
figura. Dibuje las regiones correspondientes en el plano z. El periodo de muestreo T se
supone de 0.3 seg. (La frecuencia de muestreo 𝑤𝑠 = 2𝜋 𝑇 = 2𝜋 0.3 = 20.9 𝑟𝑎𝑑/𝑠𝑒𝑔.)
Figura 40 Mapeo del plano s al plano z
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
23
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
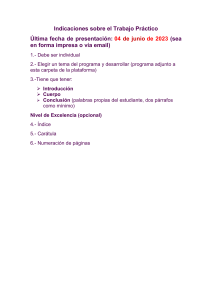
SOLUCION ANALITICA DEL MAPEO .
Para el punto a:
𝑠 = −4.5 + 𝑗7
𝑍 = 𝑒 𝑇𝑆 = 𝑒 0.3(−4.5+𝑗7) = 𝑒 −(0.3)∗(4.5)+𝑗7∗(0.3)
180
𝜃 = (7) ∗ (0.3) = 2.1 𝑟𝑎𝑑 ∗ (
) = 120
𝜋
𝜌 = 𝑒 −(0.3∗(4.5)) = 0.26
CODIGO
clear all, close all,clc
T=0.3;%peridodo
theta=7*T;%angulo,argumento
rho=exp(-4.5*T)%modulo
polar(theta,rho,'*m')%funcion polar para graficar
Figura 41 Mapeo del polo s=-4.5+j7 punto a
Ahora vamos a graficar el polo a y b sabiendo que tienen mismo ángulos, pero solamente
cambiaria la fase
Punto B:
𝑠 = −1 + 𝑗7
𝜌 = 𝑒 −(0.3)∗(4.5) = 0.7408
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
24
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
clear all, close all,clc
T=0.3;%peridodo
theta=7*T;%angulo,argumento
rho=exp(-4.5*T)%modulo
polar(theta,rho,'*m')%funcion polar para graficar
hold on %para que la grafica se mantenga
theta=7*T;
rho=exp(-1*T);%el modulo del punto b
polar(theta,rho,'*m') %grafica del punto b
Figura 42 Mapeo del punto a y del punto b
➢ Que pasa que el otro punto se encuentra arriba solo que yo no lo puedo ver vamos a
cambiar el orden de la programación ponemos el más grande acá arriba me refiero al
módulo del punto a es menor que el del punto b
clear all, close all,clc
T=0.3;%peridodo
theta=7*T;%angulo,argumento
rho=exp(-1*T)%modulo
polar(theta,rho,'*m')%funcion polar para graficar
hold on %para que la grafica se mantenga
theta=7*T;
rho=exp(-4.5*T);%el modulo del punto a
polar(theta,rho,'*m') %grafica del punto a
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
25
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Figura 43 Mapeo del punto a y
➢ Para generar la línea de a hasta b sabiendo que tienen la misma fase generamos el
siguiente código
CODIGO:
clear all, close all,clc
T=0.3;%peridodo
vector=-4.5:0.1:-1;%el punto a al punto b el paso es positivo quev hacia la
derecha
rho=exp(vector.*T)%modulo
theta=7*T.*ones(1,length(rho));%angulo,argumento usamos la misma longitud de
vector rho
polar(theta,rho,'*m')%funcion polar para graficar
Figura 44 Mapeo del punto a y del punto b
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
26
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
Ahora generamos el siguiente mapeo del e hasta d combinado con el punto a hasta b
Nos quedaría de la siguiente manera
clear all, close all,clc
T=0.3;%peridodo
vector=-4.5:0.1:-1;%el punto a al punto b el paso es positivo quev hacia la
derecha
rho=exp(vector.*T)%modulo
theta=7*T.*ones(1,length(rho));%angulo,argumento usamos la misma longitud de
vector rho
polar(theta,rho,'*m')%funcion polar para graficar
hold on
theta=-7*T.*ones(1,length(vector)); %del punto e al d solo cambia la fase
polar(theta,rho,'*m')%graficar el punto e,d
Figura 45 Mapeo del punto e y del punto d
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
27
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
➢ Finalmente, para terminar el mapeo nos faltaría los puntos de a a e y b a d usamos el
misma analogía del anterior solo que en este caso va cambiar la fase mientras que la
magnitud se mantiene constante entonces nos quedaría de la siguiente manera
CODIGO
clear all, close all,clc
T=0.3;%peridodo
vector=-4.5:0.1:-1;%el punto a al punto b el paso es positivo quev hacia la
derecha
rho=exp(vector.*T)%modulo
theta=7*T.*ones(1,length(rho));%angulo,argumento usamos la misma longitud de
vector rho
polar(theta,rho,'*m')%funcion polar para graficar
hold on
theta=-7*T.*ones(1,length(vector));%del punto e al d solo cambia la fase
polar(theta,rho,'*m')%graficar el punto e,d
hold on
vectortheta=[7:-0.1:-7];%generamos un vector de la fase ce 7 hasta menos 7
como el modulo se mantiene
theta2=vectortheta.*T;
rho2=exp(-1*T).*ones(1,length(theta2));%aca vemos que mantenemos el modulo
esto serai de b a d
polar(theta2,rho2,'b')
hold on
rho2=exp(-4.5*T).*ones(1,length(theta2));% de a a e
polar(theta2,rho2,'b')
Figura 46 Mapeo del punto a.b.d,e juntados
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
28
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
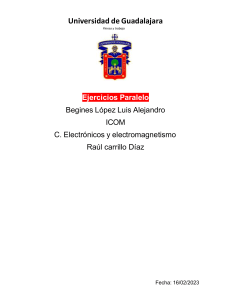
5.5 Consideremos los polos en el plano s con relaciones amortiguación entre
𝜉 = 0.6 𝑦 𝜉 = 0.9 y frecuencias naturales 𝜋/10𝑇 y 3𝜋/10𝑇 que se encuentran en
el área sombreada de la figura 47
Figura 47 Ubicación de los polos deseados en el plano s
L a región de los polos puede ser vista en el semicírculo de la figura 48
Figura 47 Ubicación de los polos deseados en el plano z
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
29
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
SOLUCION ANALITICO:
➢ Para la frecuencia
𝑊𝑛1 =
𝜋
𝜋
=
= 3.14159
10𝑇 10 ∗ (0.1)
𝑊𝑛2 =
3∗𝜋
3∗𝜋
=
= 9.424
10𝑇
10 ∗ (0.1)
➢ Usamos la forma general de los polos
𝑊𝑛2 =
3∗𝜋
3∗𝜋
=
= 9.424
10𝑇
10 ∗ (0.1)
𝑆1,2 = −𝜉𝑊𝑛 ± 𝑗 ∗ 𝑊𝑛 ∗ √1 − 𝜉 2
➢ Los amortiguamientos respectivamente
𝜉1 = 0.6
𝜉2 = 0.9
➢ Usamos la conversión del plano s al plano z
𝑍 = 𝑒 𝑇𝑆 = 𝑒 𝑇(−𝜉𝑊𝑛±𝑗∗𝑊𝑛∗√1−𝜉
2)
CODIGO EN MATLAB:
clear all;
close all;
clc;
%primero graficamos con el amortiguamiento constante 0.6 y la frecuencia de
3.14 hasta 9.42
T=0.1%periodo de muestreo
Wn=3.14:0.1:9.42;%frecuencia
amorg=0.6;
Real= -amorg.* Wn % como sabemos la parte real esta compuesta por el -ξ *Wn
imag= Wn.*sqrt(1-amorg^2);%parte imaginaria
rho=exp(Real.*T)%el rho o modulo
theta=T*imag.*ones(1,length(rho));%theta
polar(theta,rho)%Grafica
hold on%mantenemos la grafica
%primero graficamos con el amortiguamiento constante 0.9 y la frecuencia de
9.42 hasta 3.14
amorg2=0.9;
Wn2=9.424:-0.1:3.14;
Real2= -amorg2.* Wn2
imag2= Wn2.*sqrt(1-amorg2^2);
rho2=exp(Real2.*T)
theta2=T.*imag2.*ones(1,length(rho2));
polar(theta2,rho2)
hold on
%primero graficamos con la frecuencia constante 9.424 y luego la
amortiguacion variable 0.9 hasta 0.6
amorg3=0.9:-0.1:0.6;
Wn3=9.424;
Real3= -amorg3.* Wn3
imag3= Wn3*sqrt(1-amorg3.^2);
rho3=exp(Real3.*T)
theta3=T.*imag3.*ones(1,length(rho3));
polar(theta3,rho3)
21 de setiembre de 2023
hold on
%primero
graficamos
con
la
frecuencia
constante
3.14
y luego la
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
amortiguacion variable 0.6 hasta 0.9
30
UNIVERSIDAD CÁTOLICA DE SANTA MARÍA
Ingeniería Mecánica, Mecánica Eléctrica y Mecatrónica
rho3=exp(Real3.*T)
theta3=T.*imag3.*ones(1,length(rho3));
polar(theta3,rho3)
hold on
%primero graficamos con la frecuencia constante 3.14 y luego la
amortiguacion variable 0.6 hasta 0.9
amorg4=0.6:0.1:0.9;
Wn4=3.14;
Real4= -amorg4.* Wn4
imag4= Wn4*sqrt(1-amorg4.^2);
rho4=exp(Real4.*T)
theta4=T.*imag4.*ones(1,length(rho4));
polar(theta4,rho4)
Figura 48 Ubicación de los polos deseados en el plano z con el
amortiguamiento y frecuencia en radianes por segundo
21 de setiembre de 2023
NOMBRE: BRAYAN CUETO QUICHCA, ADAN FABRICIO FARFAN MANRIQUE
31