1. TRANSPORTATION AND INSTALLATION
B-84194EN/01
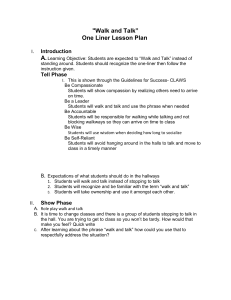
MV
FH
FV
MH
Fig. 1.2 (d) Force and moment that acts on the robot base
Table 1.2 (a) Force and moment that acts on the robot base
Force in vertical
Vertical moment
Horizontal moment
direction
MV [Nm]
MH Nm
FV N
During stillness
During acceleration
or deceleration
During Smooth stop
Force in horizontal
direction
FH N (kgf)
310
490
0
0
380
550
120
180
610
800
250
220
Table1.2 (b) Stopping time and distance until the robot stopping by Smooth stop after input of stop signal
Model
Speed
J1
J2
J3
456
452
452
Stopping time [ms]
250mm/s
9.4(0.16)
6.5(0.11)
5.1(0.09)
Stopping angle [deg] (rad)
460
456
452
Stopping time [ms]
300mm/s
11.2(0.20)
7.8(0.14)
6.1(0.11)
Stopping angle [deg] (rad)
CRX-10iA
468
464
464
Stopping time [ms]
1000mm/s
29.3(0.51)
25.8(0.45)
20.3(0.35)
Stopping angle [deg] (rad)
484
468
476
MAX speed
Stopping time [ms]
(HIGH SPEED MODE)
29.3(0.51)
29.3(0.51)
42.9(0.75)
Stopping angle [deg] (rad)
340
536
596
Stopping time [ms]
250mm/s
6.5(0.11)
6.2(0.11)
6.7(0.12)
Stopping angle [deg] (rad)
340
540
596
Stopping time [ms]
300mm/s
7.8(0.14)
7.4(0.13)
8.0(0.14)
Stopping angle [deg] (rad)
CRX-10iA/L
352
548
616
Stopping time [ms]
1000mm/s
21.8(0.38)
24.4(0.43)
26.6(0.46)
Stopping angle [deg] (rad)
520
612
616
Stopping time [ms]
MAX speed
(HIGH SPEED MODE)
32.4(0.57)
33.9(0.59)
43.9(0.77)
Stopping angle [deg] (rad)
-
Stopping time and distance until the robot stopping by contact stop after input of stop signal
When contact stop is performed, robot stops in stopping time/ stopping distance which is shorter than the
controlled stop. For the examination of the system, please use a value at the time of the controlled stop
mentioned above.
-5-
 0
0