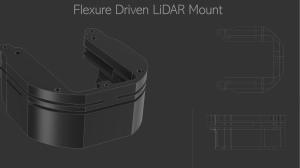
LiDAR for Railway OHE Assessment: Block-less Parameter Measurement
advertisement

Ex 1 Ø AOH of Turn-outs and cross-overs: Crucial to avoid panto-entanglements Ø Double line blocks: Disruption to traffic Ø Parameters checked and adjusted, if required: Done manually Ø Accuracy questionable Ø Costly Ø Oblivious to the OHE condition in the absence of blocks 2 Ø Measure parameters without blocks Ø Adjust if required. Ø Huge savings and efficient utilisation of manpower LiDAR TIME OF FLIGHT ULTRASONIC DEPTH-CAMERAS 3 Light Detection and Ranging: Calculates distance by measuring the time delay Between go and return of HF IR laser pulsed waves. Range:40m Resolution : 0.1mm 4 Laser Receiver Laser Emittor LCD Display Servo-motor assembly Processor board housing Tripod-stand 5 Auto-detection of track centre. Drag and drop to assess distance Between any two points. 6 Collecting LiDAR data points from obligatory locations There are two modes of scans: •Full •Single Full scan takes 5 mins and single mode scan takes 2 mins. The LiDAR generated points are stored in USB. 7