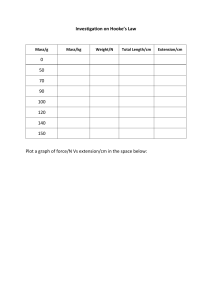
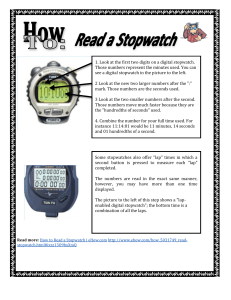
Investigations into the Spring Constant Abstract In this investigation we sought to investigate the spring constant by using a balanced force equation for a vertically suspended spring mass system in equilibrium, and the natural frequency of the spring as it oscillates harmonically. We will measure the distance the spring is stretched by the weight of the mass, and when the system is in equilibrium, and use that to derive a spring constant. We will then stretch the system a distance and measure the period of oscillation, then use it to derive an experimental spring constant. Our null hypothesis is that the forces will be the same, but we expect to reject it. The difference between the two derived values differed vastly, as is consistent with modern physical understanding. Introduction The use of springs in our modern world are vast, stretching from ball point pens to scales to automobiles and guns. One of the earliest known uses of advanced springs was by King Tutankhamen, who used leaf springs on his carriages to make his journeys more smooth (1). Springs have been investigated by many people, including Leonardo Da Vinci, who invented a small spring to be used in guns (1). In classical physics, it is known that the restoring force on an object under pressure is directly proportional to the amount it is stretched or compressed (2). This gives the equation below; F = -Kx (1) Where F equals the restoring force of the spring, x equals the amount the spring is stretched or compressed, and K equals the spring constant of the spring in question. This equation is known as Hooke’s Law, named after Robert Hooke (2). With Hooke’s law, there are limitations, including that it is not valid beyond the elastic limit of the material. This means that no material can be compressed or stretched beyond its elastic limit, and if it is, it will be permanently deformed (2). If one were to place a mass on a vertically suspended spring, as in the interest of this investigation, the spring would stretch until equilibrium has been reached between the restoring force of the spring and the force of gravity on the mass. Thus, one can write a balanced force equation, as shown below. kx = mg (2) This equation can be manipulated to isolate for the spring constant of the spring in question, providing a theoretical value for the spring constant. 𝐾 = 𝑚𝑔 𝑥 (3) This system would remain stationary unless acted upon by an external force, as stated in Newton’s first law of motion (3). Indeed, if the spring mass system is stretched a distance x, it will oscillate in a mostly constant way, and the motion of the system can be described as harmonic. It is known that the motion of a harmonic oscillator, such as the one described above, will oscillate with a period T, and this period is described with the equation below (4). 𝑇 = 2π 𝑚 𝑘 (4) Therefore, if one were to measure the period of oscillation of the mass spring system when stretched a certain distance, one could derive the spring constant through manipulating the equation above as such. 𝑇 2 𝑘 = 𝑚/( 2π ) (5) Thus, there are multiple ways to derive a spring constant for a mass spring system, with the first method calculating static stiffness and the second method calculating dynamic stiffness. It is important to note that these values will not be the same, because in both cases, the mass of the spring itself, as well as the mass of the string is ignored in calculation (5). Method The materials to use for this investigation are a tape measure, a spring, a retort stand, a stopwatch, a 200g mass, scissors, and a sufficient amount of string to attach both the spring to the mass and the spring to the retort stand. To set up this investigation, two lengths of string are cut. One length is used to tie the spring to the retort stand, and the equilibrium length of the spring is measured with the tape measure. The other length of string is used to tie the 200g mass to the other end of the string, and the new, stretched length of the spring is measured. Using a balanced force equation for the forces acting on the affixed mass, a theoretical spring constant is determined. Figure 1: Experimental Arrangement Experimental Method: 1. Pull the 200g mass down, to extend the spring a distance of 0.01m 2. Release the mass, and after it has oscillated 3-4 times, begin the stopwatch, being careful to begin the stopwatch at the moment when the mass is at its bottom maximum amplitude. 3. Count 20 full bounces, and stop the stopwatch when 20 bounces have been completed. 4. Record the time on the stopwatch, and divide that number by 20 to get the time for the period of oscillation. 5. Repeat steps 1-4 for 30 trials. Limiting factors for this experiment include that the stopwatch only measures to centiseconds, so the degree of accuracy would be to centiseconds only. Another limiting factor is that the tape measure only measures to millimetres, so the degree of accuracy would be to millimetres only. Human error must also be considered, as it is possibly the largest source of error for this investigation. This human error stems from the inability of the human eye to recognize the exact moment the mass spring system completes its 20th oscillation. In addition, there is a slight delay from the moment the 20th oscillation is finished and the moment that the stopwatch is stopped, which will increase the experimentally determined period. To reduce limiting factors, the same person operated the stopwatch each time, and counted the oscillations. Also, the stopwatch was started after 3-4 oscillations of the mass, to produce the most accuracy possible for the investigation. Analysis When we performed this experiment, we expected that the theoretically derived spring constant would be different from the experimentally derived spring constant. We knew this because in a theoretical world, the spring constants would be the same, but in our real world, the mass of the spring and the mass of the string must be accounted for. We compared a theoretically derived value for the spring constant of a spring and the experimentally derived value for spring constant. We tested this by using a balanced force equation to derive a theoretical value, then measured the period of oscillation of the spring mass system when stretched a distance of 1 cm, and derived a spring constant with calculations. Our assumption held, as the theoretically derived value differed vastly from the experimentally derived value. Our investigation did not yield outliers. The level of significance was to 0.01 seconds. Because the only value we measured was time, our experimental uncertainty is half of the smallest time increment. The stopwatch measured to the centisecond (0.01s), so the experimental uncertainty is 0.005 seconds. Our key result was that two values for the spring constant of the spring were drastically different. The mean period of oscillation was 0.322 seconds, and standard deviation in our data set was 0.005. Using a formula that relates period to spring constant, we determined the experimental spring constant to be 76.246N/m, in stark contrast to the theoretically determined spring constant of 122.625 N/m. Our Z score test yielded a Z value of 65.5, with a probability (p value) of 0. This means that we reject our null hypothesis, meaning that the experimentally derived value and the theoretically derived value for spring constant differed. Figure 2: A graph of Trial # vs Period of Oscillation Discussion In our investigation, we wanted to show that the spring constant we calculated from experimentally gathered data was different from the spring constant we calculated from our balanced force equation of the affixed mass when in equilibrium. The reason our results differed so much was because of the difference between static and dynamic coefficients, and we expected this result given that it aligns with modern physical theory. Because our mass was relatively small, the effect of neglecting the mass of the spring itself, and the mass of the string were very great, which also skewed our results. In this investigation there were multiple causes of error growth. One of which was that the spring used in the investigation was most likely used before, so using Hooke’s Law to calculate the spring coefficient would yield a less accurate result than if a new spring was used. In addition, for our experimental calculations, we used the mean period of oscillation to calculate the spring coefficient, when it would have been more precise to calculate the spring coefficient with each period from each of the 30 trials, and then took the mean spring coefficient. Another big cause of error growth was human error, which made a big impact on the results. The human error stemmed from the inability of the human eye to recognize the exact moment the mass spring system completed its 20th oscillation. In addition, there was a slight delay from the moment the 20th oscillation was finished and the moment that the stopwatch was stopped, causing the period to increase slightly. The results of this experiment could be extended into all sorts of fields, including the automobile industry, most all types of industrial machinery, furniture, even in the crafting of pens. In the furniture industry, there is a direct correlation, as springs are used to hold up cushions on a couch for example, and when someone sits on said couch, the spring will compress, and there will be a restoring force. To improve this experiment, one could use a photogate, which is a much more precise way to time oscillations and therefore period, than using a stopwatch and the naked eye. In addition, one could do more calculations to factor in the weight of the spring, and/or use a bigger mass, however that would cause the spring to degrade more quickly, and thus change its spring constant. Appendix (1) Data Citations: 1. Hagens Spring Group. (2019). The history of the spring. Hagens Fjedre. Retrieved January 27, 2023, from https://www.hagens.com/en/about-the-hagens-spring-group/the-history-of-the-spri ng.aspx 2. Bellis, Mary. (2020, August 27). Biography of Robert Hooke. Retrieved January 27, 2023 from https://www.thoughtco.com/spring-coils-physics-and-workings-4075522 3. Newton, I. (1833). Philosophiae naturalis principia mathematica (Vol. 1). G. Brookman. 4. University of Brimingham. (2022). Physics - simple harmonic motion. University of Birmingham. Retrieved January 27, 2023, from https://www.birmingham.ac.uk/teachers/study-resources/stem/Physics/harmonic-m otion.aspx 5. Garrett, S. (2020). The Simple Harmonic Oscillator. In Understanding Acoustics (pp. 59–131). essay, Graduate texts in Physics .