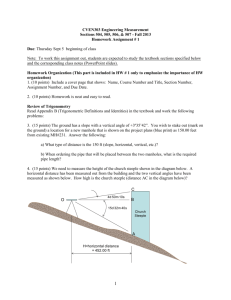
Basic Surveying CE 263 Introduction to Surveying ► Definition: Surveying is the science and art of determining the relative positions of points above, on, or beneath the earth’s surface and locating the points in the field. The work of the surveyor consists of 5 phases: 1. 2. 3. 4. 5. Decision Making – selecting method, equipment and final point locations. Fieldwork & Data Collection – making measurements and recording data in the field. Computing & Data Processing – preparing calculations based upon the recorded data to determine locations in a useable form. Mapping or Data Representation – plotting data to produce a map, plat, or chart in the proper form. Stakeout – locating and establishing monuments or stakes in the proper locations in the field. 2 Categories of Surveying: Plane Surveying – surveying with the reference base for fieldwork and computations are assumed to be a flat horizontal surface. 1. 2. Generally within a 12 mile radius the pull of gravity is very nearly parallel to that at any other point within the radius and thus horizontal lines can be considered straight. Geodetic Surveying – surveying technique to determine relative positions of widely spaced points, lengths, and directions which require the consideration of the size and shape of the earth. (Takes the earth’s curvature into account.) 7 Types of Surveys: 1. 2. 3. 4. Photogrammetry – mapping utilizing data obtained by camera or other sensors carried in airplanes or satellites. Boundary Surveying – establishing property corners, boundaries, and areas of land parcels. Control Surveying – establish a network of horizontal and vertical monuments that serve as a reference framework for other survey projects. Engineering Surveying – providing points and elevations for the building Civil Engineering projects. 7 Types of Surveys: Topographic Surveying – collecting data and preparing maps showing the locations of natural man-made features and elevations of points o the ground for multiple uses. Route Surveys – topographic and other surveys for long – narrow projects associated with Civil Engineering projects. 5. 6. Highways, railroads, pipelines, and transmission lines. Hydrographic Surveying – mapping of shorelines and the bottom of bodies of water. 7. Also known as bathymetric surveying. Brief History of Surveying: Surveying had it’s beginning in Egypt about 1400 BC 1. Land along the Nile River was divided for taxation. Divisions were washed away by annual floods. “ROPE-STRETCHERS” Egyptian surveyors were created to relocate the land divisions (measurements were made with ropes having knots at unit distances). Extensive use of surveying in building of Egyptian monuments Greeks: expanded Egyptian work and developed Geometry. 2. Developed one of the earliest surveying instruments – Diopter (a form of level). Brief History of Surveying: Romans: developed surveying into a science to create the Roman roads, aqueducts, and land division systems. 3. Surveyors held great power, had schools and a professional organization Developed several instruments: • • • Groma – cross instrument used to determine lines and right angles Libella – “A” frame with a plumb bob used for leveling Chorobates – 20’ straight edge with oil in notch for leveling Middle Ages: land division of Romans continued in Europe. 4. Quadrans – square brass frame capable of turning angles up to 90° and has a graduated scale developed by an Italian named Von Piso. Brief History of Surveying: 18th & 19th Century in the New World: the need for mapping and marking land claims caused extensive surveying, especially by the English. 5. 1785: United Stated began extensive surveys of public lands into one mile square sections • 30 states surveyed under the U.S. Public Land System (also called the Rectangular System) 1807: United States Geological Survey founded to establish an accurate control network and mapping Famous American Surveyors: George Washington, Thomas Jefferson, George Rogers Clark, Abe Lincoln and many more. Brief History of Surveying: 20th Century and Beyond: As technology advanced, population increased, and land value caused development of licensure for surveyors in all states. 6. Educational requirements for licensure began in the early 1990’s Capable of electronic distance measurement, positioning using global positioning systems, construction machine control, and lidar (scanning) mapping Involvement in rebuilding of the infrastructure and geographic information systems (GIS) Shortage of licensed professionals is projected well into the 21st century Measurement of Distance ► Linear measurement is the basis of all surveying and even though angles may be read precisely, the length of at least one line in a tract must be measured to supplement the angles in locating points. Methods of measuring a horizontal distance: ► Rough Measuring: Pacing, Odometer readings, Tacheometry (stadia), Taping, EDM, and GPS Only the last three meet survey accuracy requirements Distance from stadia: (High wire-Low wire) * 100 = Distance (ft) ► ► ► More accurate measuring: taping, EDM (1966), GPS EDM and GPS are most common in today’s surveys In pacing, one establishes the # of paces/100’ by counting the # of paces over a pre-measured 300’ line Measurement of Distance ► Taping: applying the known length of a graduated tape directly to a line a number of times. 2 Problems exist in Taping: 1. 2. Measuring the distance between two existing points Laying out a known distance with only the starting point in place Measurement of Distance 1. 2. 3. 4. 5. 6. 6 Steps of Taping Lining in – shortest distance between two points is a straight line. Applying tension – rear chain is anchor and head chain applies required tension. Plumbing – horizontal distance requires tape to be horizontal. Marking tape lengths – each application of the tape requires marking using chaining pins to obtain total length. Reading the tape – the graduated tape must be read correctly. Recording the distance – the total length must be reported and recorded correctly. Types of Chains and Tapes ► Before the ability to make steel rods and bands, sticks were cut into lengths of 16.5’ (Rod) and they were laid end to end to measure. ► Gunter’s Chain 66’ long with 100 link w/each link being 7.92 inches or 66 feet long Developed by Edmund Gunter in 1600’s in England and made with individual wires with a loop at each end connected Chain had between 600-800 wearing surfaces which with hard use would wear and cause chain to elongate Measurements were recorded in chains and links 7ch 94.5lk = 7.945 ch = 7.945 X 66’/ch = 524.37’ 1 chain = 4 rods; 80 chains = 1 mile Types of Chains and Tapes ► Engineer’s Chain Same construction as Gunter’s Chain, but each link is 1.0’ long and was used for engineering projects ► Surveyor’s and Engineer’s Tapes Made of ¼” to 3/8” wide steel tapes in 100’; 200’; 300’ lengths Multiple types of marking and graduation: ► Available in chains, feet, and metric ► Graduated: Throughout – feet and tenths marked the entire length Extra foot – feet marked the length of the tape with additional foot at the 0 end graduated in tenths and hundreds of the foot Types of Chains and Tapes ► Invar Tapes Made of special nickel steel to reduce length variations due to temperature changes The tapes are extremely brittle and expensive Used most of the time for standard comparison of tapes ► Cloth, Fiberglass, and PVC Tapes: Lower accuracy and stored on reels. Used for measurement of 0.1’ accuracy requirements Accessories 1. 2. 3. 4. Chaining Pins – set of 11, used to mark the tape lengths Hand Level – used to determine required plumbing height Plumb Bob – used to transfer the mark from the tape to ground Tension Handle – used to maintain correct tension on tape Taping (Field Process) The line to be taped should be marked at both ends 1. Keeps measurement on line Rear chain person should keep the head chain person on line 1’ of line error/100’ = 0.01’ error in length Applying Tension 2. Rear chainman is anchor and should hold 100’ mark over point ► ► Tension is applied by head chain person – normally 12 to 30 pounds of pull Tapes are standardized at 12 lbs., but greater is utilized to compensate for sag Taping (Field Process) Plumbing 3. One end of tape is raised to maintain a horizontal measuring plane. ONLY one end is elevated ► ► This allows measurements to be made on uneven ground If a high spot exists in center, “break” tape by measuring to the top and then move forward to complete the distance Slope Measurements: ► Generally, measurements are made horizontally, but on even, often man-made slopes the distance can be measured directly on the slope, but the vertical or zenith angle must be obtained. Horizontal Distance = sin Zenith Angle X Slope Distance Horizontal Distance = cos Vertical Angle X Slope Distance Stationing: ► Starting point is 0+00 and each 100’ is one station 700’ from starting point is Station 7+00 ► If distance is 857.23’ from starting point, it is expressed as Station 8+57.23 Taping Error: 1. 2. 3. Instrumental Error – a tape may have different length due to defect in manufacture or repair or as the result of kinks Natural Error – length of tape varies from normal due to temperature, wind and weight of tape (sag) Personal Error – tape person may be careless in setting pins, reading the tape, or manipulating the equipment ► Instrumental and natural error can be corrected mathematically, but personal error can only be corrected by remeasure. ► When a tape is obtained, it should either be standardized or checked against a standard. ► Tapes standardized at National Bureau of Standards in Maryland ► Standardized at 68 degrees F and 12 lbs. tension fully supported. Tape Error Correction: 1) Measuring between two existing points: 1) If a tape is long, the distance will be short, thus any correction must be added 2) If tape is short, the distance will be long, thus any correction must be subtracted 3) If you are setting or establishing a point, the above rule is reversed. Generally can correct for tape length, temperature, tension, and sag, but tension and sag are negated by increasing tension to approximately 25 – 30 lbs. Error in Taping: ► Tape Length: Correction per foot = Error in 100’/100’ If tape was assumed to be 100.00’ but when standardized was found to be 100.02’ after distance measured at 565.75’ then: Correction =(100.02-100.00)/100.00 = 0.0002’ error/ft 565.75’ X .0002’/’ = 0.11’ correction and based upon rule, must be added, thus true distance = 565.86’ If tape had been 99.98’ then correction would be subtracted and true distance would be 565.64’ Error in Taping: ► Temperature – Tapes in U.S. are standardized at 68F; the temperature difference above or below that will change the length of the tape Tapes have a relatively constant coefficient of expansion of 0.0000065 per unit length per F CT = 0.0000065(Temp (F)-68) Length Example: Assume a distance was measured when temperature was 30°F using a 100’ tape was 872.54’ (68 – 30) X 0.00000645 X 872.54’ = 0.21’ error tape is short, thus distance is long, error must be subtracted and thus 872.54’ – 0.21’ = 872.33’ (note: temperature difference is absolute difference) Surveying Metric Conversion ►1 Survey Foot = 1200 / 3937 meters ► 1 Meter = 3937 / 1200 Survey Feet Transit ► Transit is the most universal of surveying instruments – primary use is for measurement or layout of horizontal and vertical angles – also used to determine vertical and horizontal distance by stadia, prolonging straight lines, and low-order leveling. 3 Components of the Transit 1. 2. 3. Alidade – Upper part Horizontal limb – Middle part Leveling-head assembly – Lower part Transit ► Alidade (upper part) Circular cover plate w/2 level vials and is connected to a solid conical shaft called the inner spindle. Contains the vernier for the horizontal circle Also contains frames that support the telescope called STANDARDS Contains the vertical circle and its verniers, the compass box, the telescope and its level vial Transit ► Horizontal Limb (middle part) This is rigidly connected to a hollow conical shaft called the outer spindle (which holds the inner spindle) Also has the upper clamp, which allows the alidade to be clamped tight Also contains the horizontal circle Transit ► Leveling-Head Assembly (lower part) 1. 2. 3. 4. 5. 6. 4 – leveling screws Bottom plate that screws into tripod Shifting device that allows transit to move ¼ to 3/8” ½ ball that allows transit to tilt when being leveled The SPIDER – 4-arm piece which holds the outer spindle Lower clamp – allows rotation of outer spindle ► Telescope: shorter Similar to that of dumpy level, but Parts – objective, internal focusing lens, focusing wheel, X-hairs, & eyepiece ► Scales: horizontal plate or circle is usually graduated into 30’ or 20’ spaces with graduations from 0 to 360 in both directions Circles are graduated automatically by machine and then scanned to ensure accuracy They are correct to with in 2” of arc Verniers ► Least count = Lowest # of reading possible – determines accuracy ► Least Count = (Value of smallest division on scale)/(# of divisions on vernier) Scale Graduation Vernier Divisions Least Count 30’ 30 1’ 20’ 40 30” 15’ 45 20” 10’ 60 10” Verniers ► 3 Types of Verniers 1. Direct or single vernier – reads only in one direction & must be set with graduations ahead of zero 2. Double vernier – can be read clockwise or counterclockwise–only ½ is used at a time 3. Folded vernier – avoids a ling vernier plate ½ of the graduations are placed on each side of the index mark Use is not justified because it is likely to cause errors Verniers ► The vernier is always read in the same direction from zero as the numbering of the circle, i.e. the direction of the increasing angles ► Typical mistakes in reading verniers result from 1.Not using magnifying glass 2.Reading in the wrong direction from zero, or on the wrong side of a double vernier 3.Failing to determine the least count correctly 4.Omitting 10’, 15’, 20’, 30’ when the index is beyond those marks Properties of the Transit 1. Designed to have proper balance between: Magnification and resolution of the telescope Least count of the vernier and sensitivity of the plate and telescope bubbles 2. 3. Average length of sight of 300’ assumed in design Specifications of typical 1’ gun: Magnification – 18 to 28X Field of view - 1 to 130’ Minimum focus – 5’ to 7’ X-hairs usually are + with stadia lines above and below The transit is a repeating instrument because angles are measured by repetition and the total is added on the plate ► Advantages of this: 1. Better accuracy obtained through averaging 2. Disclosure of errors by comparing values of the single and multiple readings Handling the Transit ► Hints on handling and setting-up the transit Pick up transit by leveling head and standards When carrying the transit, have telescope locked in position perpendicular to the leveling head with objective lens down When setting-up, keep tripod head level and bring plumb bob to within ¼” of point to be set over, then loosen leveling screws enough to enable you to move transit on plate, then move transit until it is over the point Operation of Transit A B ► 9 Steps C 1. Set up over point B and level it. Loosen both motions 2. Set up the plates to read 0 and tighten the upper clamp. (Upper and lower plates are locked together) 3. Bring Vernier to exactly 0 using upper tangent screw and magnifying glass. 4. Sight on point A and set vertical X-hair in center of point, by rotating transit 5. Tighten the lower clamp and entire transit is locked in 6. Set X-hair exactly on BS point A using the lower tangent screws. At this point the vernier is on 000’ and the Xhairs are on BS Operation of Transit A B C 7. Loosen the upper clamp, turn instrument to right until you are near pt. C. Tighten the upper clamp 8. Set vertical X-hair exactly on pt. C using the upper tangent screw. 9. Read on vernier ► ► If repeating , loosen lower motion and again BS on A (using only lower motion), and then loosen upper motion to allow to accumulate. If an instrument is in adjustment, leveled, exactly centered, and operated by an experienced observer under suitable conditions, there are only 2 sources for error. 1. 2. Pointing the telescope Reading the plates Transit Field Notes 1d Mean 0-90 (4d)4 90-180 (4d + 360) 4 180-270 (4d + 720) 4 270-360 (4d + 1080) 4 Use longest side for backsite TOTAL STATIONS TOTAL STATION SET UP ► WHEN TOTAL STATION IS MOVED OR TRANSPORTED, IT MUST BE IN THE CASE!!!!!!!! 1. ESTABLISH TRIPOD OVER THE POINT. OPEN THE CASE AND REMOVE TOTAL STATION, PLACING IT ON THE HEAD OF THE TRIPOD AND ATTACH SECURELY WITH CENTER SCREW. CLOSE THE CASE. GRASP TWO TRIPOD LEGS AND LOOK THROUGH THE OPTICAL PLUMB, ADJUST THE LEGS SO THAT BULLSEYE IS OVER THE POINT (KEEP THE TRIPOD HEAD AS LEVEL AS POSSIBLE). UTILIZING THE TRIPOD LEG ADJUSTMENTS, LEVEL THE TOTAL STATION USING THE FISH-EYE BUBBLE. LOOSEN THE CENTER SCREW TO ADJUST THE TOTAL STATION EXACTLY OVER THE POINT IF NEEDED. COMPLETE LEVELING THE TOTAL STATION USING THE LEVEL VIAL. CHECK TO MAKE SURE YOU ARE STILL ON THE POINT. 2. 3. 4. 5. 6. 7. 8. TURNING ANGLES WITH TOTAL STATION 1. 2. 3. 4. 5. SIGHT ON THE BACKSIGHT UTILIZING THE HORIZONTAL ADJUSTMENT SCREW. ZERO SET THE INSTRUMENT (THIS PROVIDES AN INNITIAL READING OF 0 SECONDS. LOOSEN TANGENT SCREW AND ROTATE INSTRUMENT TO FORESIGHT. TIGHTEN TANGENT SCREW AND BRING CROSS HAIR EXACT ON TARGET WITH ADJUSTMENT SCREW. READ AND RECORD ANGLE AS DISPLAYED. TO CLOSE THE HORIZON: 1. SIGHT ON FORESIGHT POINT FROM ABOVE AND ZERO SET INSTRUMENT. 2. ROTATE TO FORMER BACKSIGHT AND ADJUST INSTRUMENT TO EXACT. 3. READ AND RECORD ANGLE AS DISPLAYED. ANGLE FROM DIRECT AND INDIRECT SHOULD EQUAL 360 DEGREES. TOTAL STATION DISTANCE MEASUREMENT 1. 2. POINT THE INSTRUMENT AT A PRISM (WHICH IS VERTICAL OVER THE POINT. PUSH THE MEASURE BUTTON AND RECORD THE DISTANCE. YOU CAN MEASURE THE HORIZONTAL DISTANCE OR THE SLOPE DISTANCE, IT IS IMPORTANT THAT YOU NOTE WHICH IS BEING COLLECTED. 1. IF YOU ARE MEASURING THE SLOPE DISTANCE, THE ZENITH ANGLE MUST BE RECORDED TO ALLOW THE HORIZONTAL DISTANCE TO BE COMPUTED. 2. IF YOU ARE COLLECTING TOPOGRAPHIC DATA WITH ELEVATIONS, IT IS IMPORTANT THAT THE HEIGHT OF THE INSTRUMENT AND THE HEIGHT OF THE PRISM BE COLLECTED AND RECORDED. THIS CAN ALSO BE SOLVED BY SETTING THE PRISM HEIGHT THE SAME AS THE INSTRUMENT HEIGHT. TOTAL STATION RULES 1. 2. 3. 4. 5. 6. NEVER POINT THE INSTRUMENT AT THE SUN, THIS CAN DAMAGE THE COMPONENTS OF THE INSTRUMENT AS WELL AS CAUSE IMMEDIATE BLINDNESS. NEVER MOVE OR TRANSPORT THE TOTAL STATION UNLESS IT IS IN THE CASE PROVIDED. DO NOT ATTEMPT TO ROTATE THE INSTRUMENT UNLESS THE TANGENT SCREW IS LOOSE. AVOID GETTING THE INSTRUMENT WET, IF IT DOES GET WET, WIPE IT DOWN AND ALLOW TO DRY IN A SAFE AREA BEFORE STORAGE. BATTERIES OF THE TOTAL STATION ARE NICAD AND THUS MUST BE CHARGED REGULARLY. AT LEAST ONCE PER MONTH, THE BATTERY SHOULD BE CYCLED. CARE SHOULD BE TAKEN AT ALL TIMES, THESE UNITS ARE EXPENSIVE ($8,000 - $45,000) Angles and Determination of Direction ► Angle – difference in direction of 2 lines Another way of explaining is the amount of rotation about a central point 3 kinds of Horizontal angles: Exterior ( to right); Interior; Deflection To turn an angle you need ►A reference line ► Direction of turning ► Angular distance Angular Units ► Degrees, minutes, seconds (sexagesimal system) Circle divided into 360 degrees Each degree divided by 60 minutes Each minute divided into 60 seconds ► Radians 1 radian = 1/2 of a circle = 0.1592*360 = 5717’44. 8” ► Grads (Centesimal System) – now called Gon 1/400 of a circle or 054’00” (100 gon = 90) Angles and Determination of Direction Angles turned in field must be accurate: 3X least count is max. error ► Check #1 – Close horizon when turning ► If traverse closes: sum of the interior angles should equal the sum of ► (N-2)X180, N = Number of sides ►3 angles = (3-2) 180 = 180 ► 4 angles = (4-2) 180 = 360 ► 8 angles = (8-2) 180 = 1080 ► 25 angles = (25-2) 180 = 4140 If an exterior angle exists, subtract it from 360 to obtain the interior Angular closure should be checked before leaving the field Angles and Determination of Direction If angular adjustment does not divide out equally: ► 1. 2. 3. Do not go to decimal unless instrument reads to decimal Observe field notes for angles with poor closure or where problems turning angles existed. Apply excess to these angles evenly. If unable to view field notes or no apparent source, generally apply excess to angles with shortest sides Bearings/Azimuths ► Bearing of a line is the acute horizontal angle between a reference meridian (North and South) and a line Azimuth of a line is the horizontal angle measured from the North meridian clockwise to the line Example M L N P Q Angles and Determination of Direction 4 Point Comparison Bearing Azimuth 1. Numeric Value 0-90 0-360 2. Method of Expressing 2 letters & number Number only 3. Direction Clockwise & counterclockwise Clockwise 4. Position of 0 point North and South North It is always very important to have your field sketch properly oriented Angles and Determination of Direction Rectangular Coordinates ► ► ► Totally based on computation of right triangle North – South Movement = Latitude = D X cos A East – West Movement = Departure = D X sin A Latitude running North are +, South are – Departure running East are +, West are – Angles and Determination of Direction ► Basic Procedure 1. 2. 3. 4. 5. Determine Latitude and Departure Sum Lat. and Departure to calc. closure Obtain balanced Lat. and Dept. (Compass Rule) Determine coordinates Once rectangular coordinates are known on point, their exact location is known with respect to all other points in the network Example B F A E C D Angles and Determination of Direction ► Balancing Methods 1. Compass Rule: (Bowditch) Used when accuracy of and length measurement is equal ► ► 2. Transit Rule: Used if angles are more accurate than distances (more accurate direction) ► ► 3. 4. (Error Lat./Perimeter length) X Distance = Latitude Correction (Error Dept./Perimeter length) X Distance = Departure Correction Correction Latitude (Side) = (Lat. Side/Sum all Lat.) X Lat. error Correction Departure (Side) = (Dept. Side/Sum all Dept.) X Dept. error Crandall Method: Used when larger random error exists in linear measurements that angular. Directional adjustments from balancing are held fixed and distances are balanced by a weighted least squares procedure Least Squares: Based on the theory of probability. Angular and linear adjustments are made simultaneously. Hand methods are long and complex not often done. Computer adjustment through existing software make it feasible, which is why it is often used today Area, Inverse, Intersection ► Once rectangular coordinates are established on all points, the relationship to all other points is known. You can: 1. Determine area of all or any portion 2. Determine length and direction between any 2 points 3. Locate new points by intersection Area, Inverse, Intersection ► Area: Method is area by cross multiplication Using example from traverse lecture: NA X EB + NB X EC + NC X ED + ND X EE + NE X EF + NF X EA = Sum N EA X NB + EB X NC + EC X ND + ED X NE + EE X NF + EF X NA = Sum E A 10000.0000 5000.0000 B 10326.7981 5356.3614 C 9938.7277 5298.7122 D 9448.9156 4560.3990 E 9854.7405 4760.8417 F 10070.8565 4583.9559 A 10000.0000 5000.0000 Difference in Sums/2 = Square feet Square feet/43560 = Acres Sum N = 294,119,678.8 Sum E = 293,663,353.6 456,325.2 / 2 = 228,162.6 ft2 = 5.24 Ac Area, Inverse, Intersection Example: Determine Area of A, D, E, F, A A 10000.0000 5000.0000 D 9448.9156 4560.3990 E 9854.7405 4760.8417 F 10070.8565 4583.9559 A 10000.0000 5000.0000 N = 186,116,759.8 E = 185,971,439.3 145,320.5 / 2 = 72,660.25 ft2 = 1.67 Ac Area, Inverse, Intersection ► Inverse: With known coordinates of any two points on a system, you find the distance and direction between the two C D ► 9938.7277 9448.9156 489.8121 5298.7122 4560.3990 738.3132 To find the Inverse between 2 Points 1. Find difference in N & E of coordinates 2. Plot ► ► 3. 4. 5. 6. Use point you are going from 1st Plot longest side 1st Determine Determine Determine Determine length using Pythagorean (a2 + b2 = c2) reference direction local using tan A = a/b line direction Area, Inverse, Intersection ► Example: Determine direction and distance D-A D A 9448.9156 10000.0000 551.0844 4560.3990 5000.0000 439.6010 Area, Inverse, Intersection ► Intersection: Determination of unknown point location with directions from two points known 1. Determine difference in coordinates Plot points and line projections Set up dual formulas (as Latitude and Departure) Solve for length Compute coordinate as sideshot 2. 3. 4. 5. C D 9938.7277 9448.9156 489.8121 5298.7122 4560.3990 738.3132 Area, Inverse, Intersection ► Example: What are the coordinates of the point of intersection of line C-F and D-A. Azimuth D-A = 3834’46”. Coordinates of D: N = 9448.9156, E = 4560.3990 C F 9938.7277 10070.8565 132.1288 5298.7122 4583.9559 714.7563 Horizontal and Vertical Curves ► Horizontal curves are the basis for most Right of Ways: Go through formulas Angle at PC and PT are always 90 Given any 2 elements T, L, C, R, D; the remainder can be completed Example: Horizontal curve, PC STA 201+00 D = 3615’00” R = 1200.00’ T= L= C= Seg = PI STA = PT STA = Horizontal and Vertical Curves Vertical Curves – Two major methods used to calculate vertical curves: Tangent offset and Equation of Parabola Information needed: ► 1. 2. 3. Grade or slope on each side of curve Elevation and station of PVI Curve length (Horizontal distance PVC – PVT) Horizontal and Vertical Curves Tangent Offset Method ► Procedure: 1. 2. 3. 4. 5. 6. 7. Compute the elevation of the PVC and PVT Compute the elevation of Chord midpoint Compute offset to curve at midpoint Determine total number of stations covered Determine tangent elevations at stations Compute curve offset at stations Combine data and determine vertical curve elevations Horizontal and Vertical Curves Equation of Parabola Method ► Equation: r = g2 - g1 / L ► g1 = initial grade r = change in grade/sta. g2 = final grade L = length of curve in stations Procedure: 1. Compute PVC and PVT elevations 2. Calculate total change in grade/station 3. Insert data to chart and compute final curve elevations To find the elevation at the high point or low point, find the station at which it fall and include that -g1 station in the elevation computations xpt = The equation gives the distance from the PVC in stations r Leveling ► Leveling is the determination of the elevation of a point or difference between points referenced to some datum Terms: 1. Datum – any level surface to which elevations are referenced 2. Mean Sea Level (MSL) – the average height of the surface of the sea for all stages of the tide over a 19 year period at 26 tide stations along Pacific, Atlantic and Gulf 3. National Geodetic Vertical Datum – nationwide reference surface for elevations throughout the U.S. – made available by National Geodetic Survey (NGS), based on 1929 adjustment. 4. Benchmark – relatively permanent object bearing a marked point whose elevation above or below an adopted datum. Leveling ► Most often Mean Sea Level is used MSL varies along the coasts Pacific is almost 2’ higher than Atlantic and Gulf ► U.S. System: National Geodetic Vertical Datum of 1929 Has been used as reference for extensive network of BM’s BM’s are periodically adjusted as to elevation ► Best to check with USGS or NGS for current elevation of a BM and also best to check between two known BM’s to verify elevation difference. Leveling ► The level surface parallels the curvature of the earth a level line is a curved line, normal () at all points to plumbline Line of sight is only normal at point of instrument A line with a sight distance of 1 mile using the earth’s radius as 3959 mile, curvature change is 0.667 feet. Refraction of line of sight of level is downward by a small amount The combined curvature & refraction amounts for short distances (normal sight dist. for levels) are: 100’ 200’ 300’ 500’ = = = = 0.0002’ 0.0008’ 0.0019’ 0.0052 Value is small for most instances can be neglected Leveling Most common leveling instrument today is the Automatic or Self-leveling level – has an internal compensator that automatically provides a horizontal line of sight and maintains this through gravity (prism hanging on pendulum) Differential Leveling: (Spirit Leveling) Most common type today ► ► Determine the difference in elevation using a horizontal line of sight and readings on graduated rod Circuit must be closed on BM of origin or on BM of equal accuracy Process: 1. 2. 3. 4. Reading on point of known elevation (BS) BS reading + BM elevation = HI Reading on point of unknown elevation (FS) HI – FS = elevation of new point Leveling ► Systematic Error in Leveling 1. Inclination of line of sight due to curvature of earth and refraction – generally very minimal due to short sights Inclination due to maladjustment of instrument 2. 3. Changes in scale of rod due to temperature 4. Both can be alleviated by equalizing length of BS and FS legs Usually ignored except in very precise work Would use same process as tape correction Rod not held plumb Minimized by carefully plumbing the rod or more commonly known as “Rocking the Rod” and taking the lowest reading Leveling ► 1. Peg Test Set 2 marks at 300’ apart, also mark center point in a relatively flat area 2. Set level at midpoint and take readings at each end 3. Determine difference in readings (difference in elevation) 4. Move level to one end and setup so that level is just in front of rod on point 5. Read rod by looking backward through scope (X-hair not visible), hold pencil on rod to determine reading 6. Read rod at other end in normal manner 7. Difference in readings should equal #3 8. If values are not equal, there is error Most instruments have adjustment screws Adjust and repeat test as a check Seven Basic Rules of Differential Leveling 1. 2. 3. 4. 5. 6. 7. Balance length of BS and FS (300’ max) Make sure gun is level and pendulum free Turn through all BM’s Give complete description of BM’s and TBM’s Have rod rocked Make sure turning points are solid Close all circuits on BM of same degree of accuracy Other Random Errors Incorrect rod reading – most common viewing foot number above and recording it 2. Parallax – having the X-hair not properly focused 3. Heat Waves – limit shot lengths 1. Field Notes STA ► Sum BS HI FS ELEV BS – Sum FS = Difference of Elevation Closure Error ► Difference in measured elevation and know elevation ► Correction factor = closure / # turns Error = 0.09’ Turns = 12 ► If Correction = 0.0075’ / turn TBM’s set, break circuit into sections ► Figure correction factor the same ► Figure correction by taking CF X # turns in section Precise Leveling Precise Leveling – Accuracy obtained by quality of instruments and care taken in the field ► High quality automatic levels are utilized ► Level rods are equipped with rod level, rod shoe (to allow better setting on BM’s); scale (on rod) is made of invar steel (not affected by temp – generally called Invar Rod) ► Reading either taken by optical micrometer or a process called 3-wire leveling is used (all 3 wire are read and averaged) ► Optical micrometer: line of sight deflected by turning micrometer screw to read subdivision on rod. ► Rod division is read as normal & then fractional reading taken from micrometer screw, thus on normal rod readings to 0.0001’ are possible Topographic Surveying ► Topographic surveying is the process of determining the positions, on the earth’s surface, of the natural, and artificial features of a given locality and of determining the configuration of the terrain. Planimetry – location of features Topography – configuration of the ground ► Both produce a topographic map which shows the true distance between objects & their elevations above a given datum ► Topos can be done by field methods, or by photogrammetric methods. (Photo also requires some field work) ► Topo map is 1st step in a construction project Topographic Surveying ► Scale and accuracy: Both depend on what used for ► Method of Representing: Most common is Contour Line – Imaginary line on surface of the earth passing through points that have equal elevation Contour Interval – Vertical distance between lines Topo map with contour lines shows elevation of points on ground & shapes of topographic features (hills, etc.) ► USGS Topo – 10’ or 20’ contour intercal ► Subdivision – 2’ or 4’ » Index Contour – every 5th contour drawn heavier on maps Slopes & X-sections can be obtained from contours Topographic Surveying Interpolating – can find elevation of any point or find contour line with known elevation of point Contour lines that close represent either a hill or depression and can be represented as: ► Marks are called hatchures (used most in depressions) Characteristics of Contours 1. 2. 3. 4. 5. Each contour must close upon itself with within a map or outside its borders – a contour line cannot end on a map except at the edge Contours do not cross or meet except in caves, cliffs & vertical walls where they can meet Contour lines crossing streams form V’s pointing upstream Contour lines crossing a ridge form U’s pointing down the ridge Contour lines tend to parallel streams Characteristics of Contours Contour lines are uniformly spaced on uniform slopes 7. Horizontal spacing between contour lines indicated steepness of slope on ground 8. Contours are generally perpendicular to direction of maximum slope 9. Contours can never branch into 2 contours of the same elevation 6. Field Methods of Topos Factors That Influence Method 1. Scale of map 2. Contour interval 3. Type of terrain 4. Nature of project 5. Equipment available 6. Required accuracy 7. Existing control 8. Extent of area to be mapped Field Methods of Topos Methods: 1. Cross section – railroad of highway 2. Trace contour – drainage or impoundments 3. Grid – small areas 4. Controlling point – large area, plane table 5. Theodolite & EDM - radial Field Methods of Topos Cross Section Method (Plus Offset): Equipment used: Transit, tape, and level 1. Establish horizontal control – traverse between control points – stakes set at cross section intervals 2. Run profile of traverse line 3. Take cross section 4. Locate planimetric features from traverse line Field Methods of Topos Trace Contour: 1. Contour is by traverse 2. Establish elevation of each station 3. Contour elevation established and is then followed by rodperson 4. Contour elevation is marked, then tied to traverse line by plus-offset Most accurate and expensive work Elevation of reservoir water line 2 transit use Field Methods of Topos Grid Method: 1. Establish baselines 2. Estimate grid of uniform size – smaller grid = more accurate 3. Number grid 4. Shoot elevation at each point 5. Tie existing objects to grid points Field Methods of Topos Controlling Point Method: (old and sketched in field) 1. Determine position & elevation of pre-selected control points 2. Depends greatly on experience & judgment of people doing work 3. Required traverse of area (CP’s) 4. Locations are made & elevations obtained along control points – then intermittent topo sketched in Field Methods of Topos Theodolite & EDM (Radial) Replaces tacheometry (stadia) Establish control points (horizontal and elevation) 2. Shoot locations and turn vertical angles 3. Used for large areas 1. Field Methods of Topos Common mistakes in topo surveys: 1. Improper selection of contour interval 2. Unsatisfactory equipment or field method for the particular survey and terrain conditions 3. Insufficient horizontal and vertical control of suitable precision 4. Omission of some topographic details Mine Surveying ► 1. 2. 3. 4. Points are on roof of mine Reasons needed Location in respect to boundaries Location in respect to other shafts Accurate maps (above and below ground) Quantities Equipment and Terms ► ► ► ► ► ► Spad – Beams that you hold plumb bob from Bracket – Mounting instrument from timber supports Trivet – Tripod that’s about 1’ tall Gyroscope – Locate north Laser vertical collimator – located point at top of vertical shaft platform Plumb shaft – Using piano wire then wiggle in at bottom Global Positioning Systems (GPS) Developed in early 1980’ s (Dept. of Defense) ► Made up of 26 satellites (24 functioning & 2 spares) ► Each satellite is 20,000 km high (off Earth’s surface) ► Each satellite is in a fixed position ► Minimum of 3 satellites needed, but 4-5 preferred ► Need satellites at least 15° above horizon ► Locate positions on Earth by distance-distance intersection ► Need 2-3 receivers ($80-$100K per system) ► Most accurate with double occupancy (no other checks) ► Differential GPS – one receiver on known point, other receiver on unknowns ► Global Positioning Systems (GPS) Biggest advantage ► Distance and direction in-between 2 points without being seen Downfalls/Limitations of GPS ► Multipath – bouncing off of walls of buildings ► Blocked signals – clouds, trees, etc. ► Sunspot – defraction from atmosphere ► DOP (Delusion of Position) – bad satellite position ► Set up error – not set up exactly over point (human error – most common) Global Positioning Systems (GPS) Methods ► Static – observation time is at least an hour Ideally set points in triangular fashion Accuracy – 1/10 million ► RTK (Real Time Kinematic) – stand for 30-60 seconds minimum Base receivers transmission, does corrections, sends corrections to receivers Limitations – limitation of transmitter signal Geographic Information Systems (GIS) ► GIS are computer programs that allow users to store, retrieve, manipulate, analyze and display spatial data ► Spatial Data (Geographic data) – any data that represents information about the Earth GIS components Recent definitions of GIS suggest that is consists of: 1. Hardware (computer and operating system) Geographic/Spatial 2. Software 3. Data Non-Geographic/Aspatial/Attribute 4. Human Operators and Institutional Infrastructure GIS Data Structures ► Vector – Made up of points, lines, and polygons GIS Data Structures ► Raster (Grids) – Made up of pixels of computer screen GIS Data Structures ► DEM (Digital Elevation Model) – Digital terrain representation technique, where elevation values are stored in raster cells Future of Surveying ► Major advances in future Remote Sensing (Government and Military) Arial Photographs ► Design Professions Every 10 years, must justify to Legislature that need for our license exists Surveyor have ULTIMATE liability Standards → Laws Continuing Education – Enough points every 2 years