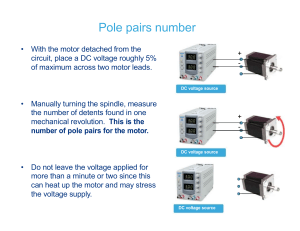
engineering mannesmann Rexroth MAC Servo Drives with servo drive modules Applications manual DOK-ANAX**-TDM+KDS+MAC-AW02-EN-P Rexroth Indramat 2 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • About this documentation Title: MAC servo drives with TDM and KDS servo drive modules Type of documentation: Applications manual Document No.: 120-0001-B301-02 Date: Sept. 1999 Replacement for: 9.552.268.4-01 This documentation is used for: – The definition of the range of applications – Assembly and installation – Commissioning and fault clearance Copyright: „Unless expressly agreed, transmission and reproduction of this document, exploitation and communication of its contents are not allowed. Contraventions are liable to actions for damages. All rights to patents and registered designs reserved. (DIN 34-1) We reserve the right to make changes to the contents of the document and the availability of the products. • DOK-ANAX**-TDM+KDS+MAC-AW02-EN-P 3 Documentation overview Inform preselect Documentation overview: „MAC servo drives“ CNC systems and AC drives CNC systems and AC drives MAC MAC MAC maintenance-free AC servo drives 71 119 70 028 AC servo drives AC servo drives for direct connection to the mains via TVD, TVR, KVR power supply modules Selection data MAC 93 MAC 21 9.552.266.4 MAC 112 (mor design, assembly) Select dimension, plan MAC 25 MAC114 MAC 41 Electrical connections: MAC AC servomotors MAC 115 MAC 63 Electrical connections: MAC AC servomotors 73101 MAC 117 MAC 71 MAC132B MAC 90 Cable doc.: connection accessories for INDRAMAT drives MAC 160 MAC 92 Cable doc.: connection accessories for INDRAMAT drives Project planning 209-0050-4399 Assembly, installation of servo drive modules, commissioning, troubleshooting, drive system diagnostics Applications Applications Applications Applications Applications Applications Applications data data data data data data data MAC MAC MAC MAC MAC MAC MAC 21 25 41 63 71 90 92 (71115) (71113) (71116) (71104) (71105) (71106) (71107) Applications data MAC 93 (71108) Applications data MAC 112 (71109) Applications data MAC 114 (71110) Applications data MAC 115 (71112) Applications data MAC 117 (71114) Project planning MAC 132B (9.552.242.4) Applications doc. MAC 160 (9.552.144.4) You have this documentation Fan units for fitting to MAC servomotors Fan units for fitting to MAC servomotors Applications manual 9.575.002.4 SP planet gears SP planet gears Servicing notes 9.564.002.4 Servo drives MAC MAC servo drives with TDM and KDS servo drive modules Worm gears Worm gears Servicing notes 9.564.026.4 Fig.: Documentation overview: „MAC servo drives“ 4 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • Inform preselect Documentation overview AC servomotors with integral SP planet gears MAC 63-160 5V MAC 25+41 5V - SP 060 (9.564.004.4) - SP 075 (9.564.005.4) - SP 100 (9.564.006.4) -SP 140 (9.564.007.4) MAC 63-160 10…16V Planet gears Project planning - SP 140-IL (9.564.022.4) - SP 180 (9.564.008.4) - SP 210 (9.564.009.4) - SP 240 (9.564.010.4) - SP 350 (9.564.011.4) MAC 63-160 5V MAC servomotors with position feedback units, Applications - Add-on incremental encoder for MAC 63 to MAC 160, 5 volt squarewave signals - Add-on incremental encoder for MAC 25 & MAC 41, 5 volt squarewave signals - Add-on incremental encoder for MAC 63 to MAC 160, 10-16 volt squarewave signals - Add-on incremental encoder for MAC 63 to MAC 160, 5 volt sinewave signals - Add-on absolute-value encoder for MAC 63 to MAC 160 Starting interlock function TDM Starting interlock function for TDM servo drive modules Applications 9.555.012.4 Safety devices Safety devices for the protection of personnel in plant and machinery using AC drives Applications 9.552.263.4 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 180 MAC 63-160 (motor design, assembly) AC servomotors with integral worm gears, Project planning 9.564.025.4 SP140 -IL 350 Select dimension, plan AC servomotors with integral worm gears 240 210 absolute value (9.568.003.4) (9.568.004.4) (9.568.005.4) (9.568.006.4) (9.568.013.4) Assembly, installation of servo drive modules, commissioning, troubleshooting, drive system diagnostics AC servomotors with integral GST tandem gears SP140 AC servomotors 100 075 with integral SP 060 SP planet gears, Project planning 9.564.024.4 AC servomotors with integral GST tandem gears, Project planning Planet gears 9.564.023.4 Project planning 5 6 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • Contents Contents 1. Mode of operation of the MAC drive 11 1.1 Field of application .................................................................... 11 1.2 Construction of the servo drive system ..................................... 12 1.3 Operation of the servo drive system ......................................... 15 1.4 MAC servomotor ....................................................................... 17 2. Functions for the user 18 2.1 Speed-controlled drive with speed set-point input .................... 18 2.2 Available torque M(max), M(KB), M(dN) ................................... 20 2.3 Torque reduction via Ired input ................................................. 22 2.4 Torque-controlled drive (tandem drive, master-slave drive) ..... 23 2.5 Emergency-stop function .......................................................... 23 3. Handling the MOD programming module 37 3.1 Determining type of servo drive and motor ............................... 37 3.2 Input weighting and speed set-point smoothing (matching to NC) ....................................................................... 37 3.3 Rating plates, labels and circuit diagrams ................................ 38 4. User inputs/output 52 5. Connections and installation 54 5.1 Protection of personnel and equipment .................................... 54 5.2 Assembly ................................................................................... 54 5.2.1Preferred arrangement of modular units in the control cabinet . 54 5.2.2Front view with accessories ...................................................... 55 5.2.3KDS servo drive module cold running technology .................... 62 5.2.4Power reduction for increased temperature and installation altitude .............................................................. 63 5.2.5Dimensional drawing and installation dimensions of servo drive modules .............................................................. 64 5.3 Connecting up and wiring the servo drive module .................... 76 5.3.1Mains connections ..................................................................... 76 5.3.2Connection accessories as supplied ......................................... 76 5.3.3Power connections .................................................................... 76 5.3.4Motor power cables ................................................................... 77 5.3.5Evaluation of the motor thermostat contact .............................. 77 5.3.6Motor feedback cables .............................................................. 79 5.3.7Position feedback units ............................................................. 80 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7 Contents 5.3.8Signal cables ............................................................................. 80 5.4 Earthing connections ................................................................. 81 5.5 Interference suppression measures .......................................... 81 5.5.1Interference sources in the control cabinet ............................... 81 5.5.2Use of radio equipment ............................................................. 81 5.5.3Radio interference suppression ................................................ 82 5.6 Connection and wiring diagrams ............................................... 82 6. Commissioning 96 6.1 Protection of personnel and machinery .................................... 96 6.1.1Safety of personnel ................................................................... 96 6.1.2Protection of equipment and machinery ................................... 98 6.2 Tools and equipment required for commissioning .................. 101 6.3 Checks with the equipment switched off ................................. 102 6.3.1Mains supply requirements ..................................................... 102 6.3.2Installed drive components ..................................................... 102 6.3.3Instructions for replacing the MOD programming module ...... 102 6.3.4Wiring and conductor cross-sections ...................................... 103 6.3.5Terminals and connecting points ............................................ 104 6.4 Power-up sequence (overview) ............................................... 106 6.5 Checks with the control voltage applied .................................. 108 6.6 Checks after the power infeed has been connected ............... 110 6.7 Check after the drive has been connected ............................. 111 6.8 Matching to the NC .................................................................. 113 6.9 Checking the drive configuration ............................................. 115 7. Troubleshooting and diagnostics 119 7.1 Construction of the monitoring system in the modules (Fig. 71) ................................................................................... 119 7.2 Effective troubleshooting ......................................................... 121 7.2.1Possible causes of malfunctions, general ............................... 121 7.2.2Fault messages at the terminal strips ..................................... 121 7.3 LED diagnostic displays .......................................................... 125 7.3.1Diagnostic displays on the power supply modules ................. 125 7.3.2Diagnostic displays on the drive modules ............................... 132 7.4 General faults and possible remedial measures ..................... 138 8. Notes on equipment replacement 140 9. Summary of diagnostic displays on modules 142 8 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • Contents 10. Summary of data 154 10.1 Important motor data ............................................................... 154 10.2 Important data on servo drive modules ................................... 157 11. Equipment fuses in the individual modules 158 12. Technical data of servo drive modules 159 13. Type designations of drive components (type codes) 173 14. Overview of the most important standards applicable to INDRAMAT drive components 179 15. List of key words • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 180 9 10 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 1. Mode of operation of the MAC drive 1. Mode of operation of the MAC drive 1.1. Applications The MAC drive is especially designed for high-accuracy servo applications in NC machine tools for metal machining and wood working, transfer lines, automation systems, as well as in production machines in the automotive industry. It is usually operated as a variable-speed drive in the position control loop of an NC. In this case a speed set-point is fed to the drive from the NC. The MAC servo drive has the following application-specific functions: – High short-time acceleration moments – Torque reduction via I(red) input, which can be used for example when running up to a fixed stop, for reducing the load on the mechanical system coupled to the motor under specific operating conditions, for operating with controlled torque to load moving mechanical devices. – Torque-controlled drive for master/slave operation of two motors that are solidly coupled together. – Reversal of direction of rotation for same set-point polarity. – Set-point input via a differential input or two summing inputs with zero voltage reference. – Externally-adjustable drift offset via potentiometer. – Equipment „ready“ state can be output via potential-free relay contact. – Rapid and clear diagnostics and easy troubleshooting via the front panel diagnostics and status lamps. – All adjustment parameters are set on the MOD programming module, so that the user of the servo drive does not need to carry out timeconsuming adjustments and calibration procedures. Matching of the controller to the motor type by the user is therefore generally unnecessary since the control parameters are already optimized in the factory for the usual existing coupled masses. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 11 12 GLD (*L) smoothing choke Twisted individual cables Control cabinet Transformer or mains commutation choke (L) Mains Mains feeder MAC servo motor (L) (with fan) MAC servo motor (L) (without fan) Mains auxiliary supply Tacho feedback (L) (L) = drive components available from INDRAMAT (*L) = optional, not required for every application Position feedback (*L) Position feedback (*L) encoder cable (*L) Fan fuse on fan plate Cable connection for fans (L) Fan assembly TDM3, TDM4 Feedback connector strip Interface terminal strip NC controller MOD plug-in programming module (L) Bus connection X1 (ribbon cable) (L) Link circuit busbars L+, L- (L) Motor feedback cable (L) Servo drive module (TDM or KDS) (L) Motor thermostat contact Motor cable connection Motor brake control Motor power cable (L) Drive module for main drive (e.g. KDA) (*L) Power supply module (e.g. TVM or KDV) (L) Additional module (TBM, TCM) (*L) Motor fan (L) Fan cable Gearbox (*L) Mains contactor Master switch/ fuse Circuit-breaker/ fuse 1. Mode of operation of the MAC drive 1.2 Construction of the servo drive system ENA3A-PrinzAufbau Fig. 1: Basic construction of the modular drive system with components marked. TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 1. Mode of operation of the MAC drive Additional feed drives Feed drive Controller enable Ready Drive torque Ready Drive torque Speed set-point Analogue Speed set-point Controller enable Analogue Supply Infeed Supply to signal conditioning circuits Programming module Programming module Control monitoring, diagnostics Control monitoring, diagnostics Power control Power control Servo drive module Servo drive module Speed actual-value Power supply module M G Speed actual-value Supply to power circuits M G 3 Feed motor 1 3 Feed motor 2 ENA3A-ServoAufbau Fig. 2: modular construction The three-phase servo drive system consists of – the mains input components (master switch, contactor, transformer or commutation inductor, power supply module, smoothing chokes, additional capacitances), – the servo drive module (control unit) – the motor cable and – the MAC servo motor. The power supply module is able to supply several different types of servo drive units and a main drive if required. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 13 1. Mode of operation of the MAC drive For special applications the performance of the drive system can be further extended by additional modules (additional bleeder, TBM, additional capacitors, CZ or TCM). Further details of these can be obtained from the documentation covering the power supply modules. The specific characteristics of the various servo drive modules and supply modules are summarized in the following table: Servo drive module Characteristics TDM 1 Standard servo drive module for MAC 71 to MAC 160 motors TDM 2 Obsolescent special unit for MAC 63 to MAC 93 motors TDM 3 Standard servo drive module for MAC 63 to MAC 112B motors TDM 4 Servo drive module for MAC 21, MAC 25, MAC 41 motors (feedback electronics built into drive module instead of motor TDM 6 Servo drive module for low-noise applications and with interface for temperature monitor, brake and starting interlock for MAC 63 to MAC 93 motors TDM 7 Servo drive module for low-noise applications and with interface for temperature monitor, brake and starting interlock for MAC 21, MAC 25, MAC 41 motors (feedback electronics built into drive module instead of motor) KDS 1 Servo drive module using cold-running technology for MAC 90 to MAC 160 motors (due to built-on external heat exchanger no heat losses occur in the control cabinet). Fig. 3: Summary of the various servo drive modules 14 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 1. Mode of operation of the MAC drive Power supply module Characteristics TVM 1 Power supply unit for connection of up to approximately 4 servo drives of up to an average mechanical output of 4.1 kW. TVM 2 Standard power supply unit for connection of up to approximately 6 servo drives of up to an average mechanical output of 4.1 kW. TVD 1 Power supply unit for direct connection to 3 x 380-460 volt mains, with built-in power contactor. KDV 1 Power supply unit using cold-running technology (due to external heatsink, no heat losses occur in the control cabinet) for one main drive and 6 servo drives with an average mechanical output of 28 kW. KDV 2 As KDV 1, but no series resistors required in the mains input for power-up. Controlled braking, especially of an associated asynchronous main drive is possible. Workpiece and tool can run free. KDV 3 As KDV 2, but also has energy recovery for machines with large load masses and short machining cycles. KDV 4 As KDV 3, but with direct mains connection to 380460 volt supplies, and controlled link circuit voltage. Fig. 4: Summary of the various power supply modules 1.3. Operation of the servo drive system The power supply module generates the DC link circuit voltage from the AC input voltage. From this the servo drive module generates a threephase system that is controlled according to amplitude, frequency and phase. This is applied to the MAC servo motor according to the current rotor position and the desired speed. The relationship between the controlled three-phase system and the controlled operating states of the servo motor is established according to the following criteria: Torque: The current amplitude of the three-phase system in the stator of the servo motor determines the resulting torque via the field of the permanentmagnet-excited rotor. It results from the system deviation of the speed controller. Speed: The frequency of the three-phase system determines the speed of the servo motor. The rotor’s position and frequency is derived from the signals of the rotor position encoder (BLC signals), depending on the required synchronism between the position of the magnetic field of the rotor and the position of the stator current. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 15 16 "Ready" state Tacho output (speed actual-value) Master output E1 - E4 inputs Speed set-point Controller enable Ext. peak current limiting Bb Bb Tsense MA E4 E3 E2 E1 RF Ired Tacho Speed controller 1s Fault messages Directional current controller Current control with pulse-width modulation Continuous current limiting Diagnostic and monitoring device MOD programming module 300 ms Peak current limiting Servo drive module Current actualvalue measurement Driver stage disable To power supply module BLC1 BLC2 BLC3 A3 A2 A1 Brushless analogue tacho T Rotor position detection Rotor Stator MAC servo motor 1. Mode of operation of the MAC drive ENA3A-Block Fig. 5: Block diagram of servo drive module signal conditioning circuits TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • Drive stage Input weighting 1. Mode of operation of the MAC drive Direction of torque: The phase relationship between the three-phase system and the magnetic field of the rotor determines the direction of the torque and is derived from the polarity of the system deviation of the speed controller. Control circuit signal conditioning: The speed controller compares the speed set-point and actual-value and from them generates the current set-point that is fed to the directional current controller via a limiter circuit (see Fig. 5). Depending on the rotor position (signalled via the BLC signals from the rotor position encoder), the direction of the current for the three stator windings is controlled so that the resulting current flow in the stator is at its most favourable in relation to the magnetic flux of the rotor. This relationship ensures that the torque is proportional to the motor current. The motor current is controlled by a current controller. This is linked to the directional current controller in order to control the current in the three phases so as to obtain a three-phase system having controlled amplitude, frequency and phase. The output signals of the current controller are timed in the pulse-width modulation stage and amplified via potential-free driver stages. The amplified signals used for driving the three-phase bridge constructed from six power transistors. 1.4. MAC servo motor The MAC three-phase servo motor is a permanently-excited synchronous motor that is made up of the following main sub-assemblies: – three-phase stator – permanently-excited rotor – optional electrically-released brake – optional separate axial fan for surface ventilation Permanent-magnet rotor Three-phase motor stator Electrically-released holding brake Brushless tachogenerator with rotor position encoder ENA3A-MACScan Fig. 6: MAC servo motor • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 17 2. Functions for the user 2. Functions for the user The user features listed in section 1.1 are described in detail here. 2.1. Speed-controlled drive with speed set-point input After the mains voltage has been applied and the drive amplifiers signal that they are „ready“, the servo drive can be run at controlled speed by – injecting the controller enabling signal at the RF input and – applying an analogue set-point voltage, that is proportional to the motor speed, across the inputs • E1 and E2 or • E3 and 0 VM or • E4 and 0 VM. The following settings are possible: (see basic circuit diagram of the servo drive module in Fig. 8). Input E1-E2 is a differential input, inputs E3 and E4 are summing inputs that are referred to 0 VM. The speed weighting (input sensitivity) has already been set in the factory on the MOD programming module. Two facilities are provided: 1. Fixed setting by resistors soldered in place on the programming module Programmiermodul MOD MOD 1 for TDM 1, MOD 5 for TDM 2, MOD 13 for TDM 3, MOD 17 for TDM 4, MOD 19 for TDM 6, MOD 21 for TDM 7, MOD 3 for KDS 1. In each case R8 refers to differential input E1-E2 R9 refers to summing input E3-0VM R10 refers to summing input E4-0VM 2. Input weighting adjustable via potentiometers P1, P2, P3 on programming module MOD 2 for TDM 1, MOD 6 for TDM 2, MOD 14 for TDM 3, MOD 18 for TDM 4, MOD 20 for TDM 6, MOD 22 for TDM 7, MOD 4 for KDS 1. The potentiometers are located on the programming module. In each case P1 and R8 refer to differential input E1-E2 P2 and R9 refer to summing input E3-0VM P3 and R10 refer to summing input E4-0VM 18 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 2. Functions for the user The resistor and potentiometer values are incorporated into the MOD programming module according to the input weighting required by the user. The last three digits of the programming module type designation specify the input weighting (see Section 3.2). If no user data are available, the MOD programming module is given the input weighting of 10 volts per max. speed value (no adjustment potentiometer). If necessary, the values R for R8, R9, R10 in MOD 1, MOD 3, MOD 5, MOD 13, MOD 17, MOD 19, MOD 21, and R8+P1, R9+P2, R10+P3 in UE 1 R = —— • ——— • 9230 - 5 n Cw in KOhm Where R is the resistance value in kOhms UE is the analogue input voltage in volts at E1-E2, E3-0VM or E4-0VM at the speed n used in the formula n is the speed in rpm Cw is the tacho voltage in volts at 1000 rpm, depending on motor type in use and shown in the table in Section 10.1 Example for Cw = 3 V/ 1000 rpm: 9.5 1 R = —— • — • 9230 - 5 = 4.74 KOhm 3000 3 Set-point smoothing MOD 2, MOD 4, MOD 6, MOD 14, MOD 18, MOD 20, MOD 22 can be calculated: The speed set-point output by the NC can be smoothed if the staircase function becomes noticeably disturbed. It should be noted that excessive smoothing can reduce the dynamic response of the position control and thus slow the reaction time. Polarity of the speed set-point, reversal of the direction of rotation Set-point smoothing can be implemented only by using the differential input E1-E2. Smoothing is provided by soldering a capacitor C5 onto the MOD programming module (up to a maximum of 3uF is possible, corresponding to a smoothing time-constant of approximately 5 to 7 ms). With the motor rotating clockwise, as viewed from the output shaft, the direction of rotation is as follows: Differential input E1-E2: voltage at E1 is positive with respect to E2 Summing inputs E3, E4: voltage at E3 or E4 is negative with respect to 0VM Tacho measuring signal at T(sense): voltage is positive with respect to 0VM • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 19 2. Functions for the user The following facilities are provided if another direction of rotation is desired: – Interchange the connections at differential input E1-E2, if this is used, – Reverse the direction of all inputs by linking terminals X6/9 and X6/10 at the control amplifier. Reversing the direction of rotation by interchanging motor connections is not possible and causes the drive to malfunction. Drift compensation The speed controller has an extremely low temperature drift. The zero drift can be corrected on the „ZERO ADJ“ potentiometer at the bottom right of the front panel (front view in Figs. 35 to 40 in Section 5.2.2). The drift should always be checked at initial operation and after replacing the servo drive module: If the axis moves with a zero speed set-point, the rotary motion of the axis should be set to zero by means of the „ZERO ADJ“ potentiometer on the front panel when the control cabinet has reached its final temperature. 2.2. Available torque M(max), M(KB), M(dN) The following torque values are available: M(max): acceleration torque M(KB): M(dN) : short-time torque for (short-time) machining continuous motor torque for 100% cyclic duration factor The values for the existing drive amplifier/motor combination can be obtained from the selection list in the „MAC xxx servomotor“ documentation. The torque values M(max) and M(KB) are permanently set on the MOD programming module via the maximum current and the continuous current and can be read from the „Current“ line on the rating plate. The following applies: M(max) peak Current ——— = ——————— M(KB) cont Current M(max) / M(KB) or peak current / continuous current ENA3A-Mp/MKB The interval during which maximum torque is available depends on the difference between maximum and short-time duty torque. The time t1 that is generally available for acceleration cycles can be read from Fig. 7. 5 4 3 2 1 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,5 2 2,5 3 3,5 t1 in s Fig. 7: Time available for acceleration cycles in relation to the peak torque/short-time duty torque ratio (in the standard version). 20 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 I ist 1) MA T sense Tacho 0VM E4 0VM E3 E2 E1 RF 3,4…24V Bb Bb I red 0…10V "Ready" "Ready" contact 20k n soll=0 P1 R6 R5 P2 P3 R11 C1 R1 C2 R2 499k B3 or R16 R10 B2 or R15 R9 B1 or R14 R8 300 … 500 ms Tacho filter Input weightings & Reduced peak current limiting -10V Differential amplifier External terminals C5 I (cont) FB Rb 4k99 4k99 4k99 Internal controller enable Speed controller Offset 1k82 Ca R7 C3 C4 I (peak) 15k Ra Current limiting R4 R3 1) TDM Rc 1) R12 C6 I ist Current controller R13 3 and TDM 4 only Components on grey background are located on MOD programming module 2. Functions for the user ENA3A-RegelteilTDMKDS Fig. 8: Block diagram of servo drive module 21 2. Functions for the user 2.3. Torque reduction via Ired input If the peak torque of the drive has to be reduced for individual operating conditions on the machine, the maximum torque can be limited externally by the user via the Ired analogue input. In this case an analogue voltage is applied to the Ired input. The value of the voltage Ured depends on the desired reduction factor k = reduced torque to maximum torque: Ured = 10 volts • (1 - k) reduzierter Motorstrom The value of the reduced motor current Ired can be obtained from the graphs in Figs. 9 and 10. The torque can be calculated from the current torque constant km of the motor in use, which can be obtained from the table in Section 10.1: M = km • Ired The smallest adjustable torque is limited to a minimum value. The associated minimum adjustable motor current can be obtained from the table in Section 10.2. If no analogue voltage is available for the Ired input, for a reduced torque value a resistor R(ex) can be connected between the Ired terminal and the +15 VM terminal via a relay contact. The value of this in kilohms is: 150 R(ex) = ——— - 100 in kOhm 1-k Where: reduction factor k = desired reduced torque to maximum torque. I red 100 A I red TD M 1. 2- 50 A 30 A 10 0 TDM 1.2- 050 TDM 1.2 -030 I min = 15 A U red 5V 10 V Where: Ired: reduced pea kcurrent Ured: voltage applied to Ired terminal 15 V ENA3A-Ired/TDM1 Fig. 9: External torque limiting for TDM 1 22 U red TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 2. Functions for the user I red/I peak 1,0 0,5 I min 5V 10 V 15 V U red Where: Ipeak: peak current set on MOD programming module (see programming module rating plate) Ired: reduced peak current Ured: voltage applied to Ired terminal Fig. 10: External torque limiting for TDM 2 and TDM 1.2/SO 100, TDM 3, TDM 4, TDM 6, TDM 7, KDS 1. 2.4. Torque-controlled drive (tandem drive, master-slave drive) The servo drive can also be operated as a torque-controlled drive. In the master-slave drive or tandem drive the speed controller of the master drive determines the speed of the slave drive. In such an operating mode the torque set-point is transferred to the set-point input of the slave drive from the speed-controlled master drive. It should be noted that the motor shafts of the master and slave drives must be mechanically coupled together without backlash to prevent the slave drive accelerating without load torque when torque is applied. This coupling must be as rigid and as torsionally stiff as possible to prevent oscillations in the mechanical system. Connections between the master drive and the slave drive are shown in Figs. 12 to 16. The MOD programming module should be specially configured for the slave drive. 2.5. Emergency-stop function A malfunction in the system or servo drive cannot be eliminated in an emergency-stop situation. It is therefore necessary in this case to isolate the power section of the drive from the mains supply via the mains contactor in order to stop the servo drive safely (by opening the emergency-stop circuit). Until the servo drive is stopped it must always be assumed that faulty and dangerous drive movement can occur, the extent of which depends on the type of fault and the operating state of the drive at the time it occurs. A higher-level safety measure must be provided to ensure that the drive disconnected via the emergency-stop circuit in the event of a general malfunction. Personenschutz For this reason, danger to personnel resulting from a malfunction must be eliminated by high-level protection at system level. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 23 2. Functions for the user In order to render the electrical shutdown of the drive as independent of the controller as possible, after the external controller enabling signal has been removed the drive modules’s set-point, which is injected at the E1-E2 input is set to zero internally, so that the drive can brake. The motor is then only free of torque after about 300 ms (see Fig. 11). 3 … 30V Input at RF terminal (external controller enabling signal) 0V Drive on Drive free of torque Internal enable 0V 300 ms Ext. set-point at E1 - E2 terminal Set-point conditioning Set-point set internally to 0 rpm ENA7A-verzAb Fig. 11: Delayed disconnection of motor controller after the external controller enabling signal is removed. 24 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 2. Functions for the user • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 25 2. Functions for the user 5 A1 A1 Master TDM 1 3 A3 A3 L- L- L+ L+ End connector ....... ....... ....... 4 Slave TDM 1 A2 Bus connection (black conductor always underneath) X1 X1 Thermostat contact U1 V1 W1 5 6 10 11 12 1 4 7 8 9 2 3 M Thermostat contact Motor feedback Torsionally stiff mechanical coupling 1 12AENA3A-MS/TDM1 Remarks 1 .... see sheet 2 Fig. 12: Connection diagram for master-slave drive with TDM 1 26 -15VM Ired 5 6 10 11 12 1 4 7 8 9 2 3 3 3 Tacho BLC 1 BLC 2 BLC 3 0VM Comon controller enabling signal 2 Motor feedback 1 X6 1 2 3 4 5 6 7 8 9 10 Polarizing pin U1 V1 W1 +15VM 0VM -15VM X5 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Polarizing pin X6 1 2 3 4 5 6 7 8 9 10 2 M Tacho BLC 1 BLC 2 BLC 3 0VM +15VM 0VM -15VM Set-point input X5 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 +15VM 0VM E1 E2 E3 E4 Bb Bb RF 0VM MA Tsense 7 -15VM Ired 6 +15VM 0VM Programming module MOD 1/XXXXX-064 E1 E2 E3 E4 Bb Bb RF 0VM Programming module MOD 1/XXXXX-... MA Tsense A2 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 8 2. Functions for the user C4 R7 R8 + E2 4k99 + 5k62 E1 Set-point input C5 499k Tacho (master drive) Tacho C3 10k - Master - R1 Tacho monitor Speed controller R2 C1 Continuous current C2 Peak current MA C4 R7 C3 78k7 10k - Slave E3 4k99 5k62 R9 82k5 7 0VM Tacho (slave drive) Tacho R1 Tacho monitor 499k R2 C1 Br. + Speed controller C2 MA Continuous current Peak current On MOD programming module 1 Reversing the direction of rotation The directions of rotation of the master and slave drives can be identical or opposite, depending on the type of mechanical coupling. The direction of rotation can be matched to these requirements with the jumper 1 . Directions of rotation of master and slave drives are identical Directions of rotation of master and slave drives are opposite With jumper between X6/9 and X6/10 on slave Without jumper between X6/9 and X6/10 on slave 2 Evaluation in the Emergency-stop circuit 3 Power supply via DC link circuit 4 Bus connection: connecting cable for unit's own power supply and monitoring 5 To central earthing point on power supply module 6 Number as per motor/amplifier combination 7 Slave module component set Current limiting as per master; R1=R2=C1=C2=C4=not used; R7=78k7; C3=jumper; input weighting -064 without potentiometer 8 Use 9-core connecting cable only. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12BENA3A-MS/TDM1 27 2. Functions for the user 5 A1 A1 Master TDM 3 A3 L- L- L+ L+ ....... X1 X1 Thermostat contact +15VM 0VM -15VM *1 U1 V1 W1 5 6 10 11 12 1 4 7 8 9 2 3 M Motor feedback 3 3 Thermostat contact 5 6 10 11 12 1 4 7 8 9 2 3 Motor feedback Torsionally stiff mechanical coupling 1 Remarks 1 .... see sheet 2 13AENA3A-MS/TDM3 Fig. 13: Master-slave drive with TDM 3 28 TÜ X41 1 2 3 4 5 6 7 8 9 2 Polarizing pin U1 V1 W1 +15VM 0VM -15VM Bb Bb RF +24VL 0VL X43 1 2 3 4 5 6 7 8 9 10 Common controller enabling signal BLC 1 BLC 2 BLC 3 0VM Tacho +15VM 0VM -15VM 2 Tsense E1 E2 TÜ +15VM 0VM -15VM Bb Bb RF +24VL 0VL 1 2 3 4 5 6 7 8 9 10 11 12 13 X43 1 2 3 4 5 6 7 8 9 10 X41 1 2 3 4 5 6 7 8 9 M X42 Iist 0VM 7 Tsense Iist 0VM Programming module MOD 13/XXXXX-064 1 2 3 4 5 6 7 8 9 10 11 12 13 Set-point input X42 E3 E4 0VM +15VM Ired FB MA E1 E2 Programming module MOD 13/XXXXX-... 6 Tacho BLC 1 BLC 2 BLC 3 0VM Bus connection (black conductor always underneath) End connector ....... ....... 4 A3 Polarizing pin 3 Slave TDM 3 A2 E3 E4 0VM +15VM Ired FB MA A2 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 8 2. Functions for the user C4 R7 R8 + E2 4k99 + 270R E1 Set-point input C5 499k Tacho (master drive) Tacho R1 Tacho monitor C3 270R - Master - Speed controller R2 C1 Continuous current Peak current C2 MA C4 R7 C3 78k7 9k09 4k99 270R R9 82k5 E3 270R - Slave - 7 0VM Tacho (slave drive) Tacho R1 Tacho monitor 499k R2 C1 MA + Speed controller Continuous current Peak current C2 On MOD programming module 1 Reversing the direction of rotation The directions of rotation of the master and slave drives can be identical or opposite, depending on the type of mechanical coupling. The direction of rotation can be matched to these requirements with the jumper 1 . Directions of rotation of master and slave drives are identical Directions of rotation of master and slave drives are opposite *Connect this conductor to *Do not connect this conductor! X41/9 (0VM) 2 Evaluation in the Emergency-stop circuit 3 Power supply via DC link circuit 4 Bus connection: connecting cable for unit's own power supply and monitoring 5 To central earthing point on power supply module 6 Number as per motor/amplifier combination 7 Slave module component set Current limiting as per master; R1=R2=not used; C1=C2=C4=not used; R7=78k7; C3=9k09; input weighting -064 without potentiometer 8 Use 9-core connecting cable only. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 13BENA3A-MS/TDM3 29 2. Functions for the user 5 A1 A1 Master KDS 3 A3 A3 L- L- L+ L+ ....... Bus connection (black conductor always underneath) End connector ....... ....... 4 Slave KDS A2 X1 X1 Thermostat contact 5 6 10 11 12 1 4 7 8 9 2 3 M Motor feedback 3 Thermostat contact MA +15VM 0VM -15VM TÜ TÜ Tacho BLC 1 BLC 2 BLC 3 0VM Polarizing pin U1 V1 W1 3 5 6 10 11 12 1 4 7 8 9 2 3 Motor feedback Torsionally stiff mechanical coupling 1 Remarks 1 .... see sheet 2 14AENA3A-MS/KDS Fig. 14: Master-slave drive with KDS 1 30 1 X24 1 2 3 4 5 6 7 8 9 10 2 Polarizing pin U1 V1 W1 +15VM 0VM -15VM X25 1 2 3 4 5 6 7 8 9 10 11 Common controller enabling signal BLC 1 BLC 2 BLC 3 0VM Tacho +15VM 0VM -15VM 2 Ired Bb Bb RF +24VL 0VL TÜ TÜ +15VM 0VM -15VM Bb Bb RF +24VL 0VL X26 1 2 3 4 5 6 7 8 9 10 11 12 13 1 2 3 4 5 6 7 8 9 10 11 X24 1 2 3 4 5 6 7 8 9 10 M E1 E2 MA E1 E2 X25 1 2 3 4 5 6 7 8 9 10 11 12 13 Set-point input X26 E3 E4 0VM 7 0VM Tsense 6 Ired Programming module MOD 3/XXXXX-064 E3 E4 0VM Programming module MOD 3/XXXXX-... 0VM Tsense A2 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 8 2. Functions for the user C4 R7 C3 10k - Master R8 + E2 4k99 C5 499k Tacho (master drive) R1 Tacho Tacho monitor + 5k62 E1 Set-point input Speed controller R2 C1 Continuous current Peak current C2 MA C4 - Slave 10k R7 C3 78k7 E3 4k99 5k62 R9 82k5 7 0VM Tacho (slave drive) 499k R1 Tacho Tacho monitor R2 C1 Br. + Speed controller C2 MA Continuous current Peak current On MOD programming module 1 Reversing the direction of rotation The directions of rotation of the master and slave drives can be identical or opposite, depending on the type of mechanical coupling. The direction of rotation can be matched to these requirements with the jumper 1 . Directions of rotation of master and slave drives are identical Directions of rotation of master and slave drives are opposite with without jumper between X24/9 and X24/10 jumper between X24/9 and X24/10 on slave on slave 2 Evaluation in the Emergency-stop circuit 3 Power supply via DC link circuit 4 Bus connection: connecting cable for unit's own power suply and monitoring 5 To central earthing point on power supply module 6 Number as per motor/amplifier combination 7 Slave module component set: Current limiting as per master; R1=R2=C1=C3=C4=not used; R7=78k7; C2=jumper; input weighting -064 without potentiometer 8 Use 9-core connecting cable only. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 14BENA3A-MS/KDS 31 2. Functions for the user 5 A1 A1 A2 A3 A3 L- L- L+ L+ Slave TDM 1.2.../S102 End connector X1 X1 ....... Bus connection (black conductor always underneath) ....... 7 M 5 6 10 11 12 1 4 7 8 9 2 3 M 3 Tacho BLC 1 BLC 2 BLC 3 0VM +15VM 0VM -15VM Common controller enabling signal BLC 3 0VM U1 V1 W1 Motor feedback Thermostat contact 3 5 6 10 11 12 1 4 7 8 9 2 3 Motor feedback Torsionally stiff mechanical coupling 1 15A-MS/TDM1/S102 Remarks 1 .... see sheet 2 Fig. 15: Master-slave drive with TDM 1.2.../S102 32 1 X6 1 2 3 4 5 6 7 8 9 10 2 Plarizing pin U1 V1 W1 Thermostat contact Tacho BLC 1 BLC 2 +15VM 0VM -15VM Set-point input X6 1 2 3 4 5 6 7 8 9 10 Polarizing pin -15VM Ired E1 E2 E3 E4 Bb Bb RF 0VM X5 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 X5 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 2 +15VM 0VM 6 +15VM 0VM Programming module MOD 1/XXXXX-064 E1 E2 E3 E4 Bb Bb RF 0VM Programming module MOD 1/XXXXX-... MA Tsense ....... 4 -15VM Ired 3 Master TDM 1.2.../S102 MA Tsense A2 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 8 2. Functions for the user C4 - Master - E2 R8 4k99 C5 Tacho (master drive) Tacho Tacho monitor C3 270R + R1 4k42 + 270R E1 Set-point input R7 Speed controller 499k R2 4k75 C1 Continuous current C2 Peak current MA C4 - Slave - 4k99 7 0VM Tacho (slave drive) Tacho 499k Tacho monitor + 270R R9 82k5 E3 270R R7 C3 78k7 9k09 R1 R2 C1 Speed controller Continuous current C2 MA Peak current On MOD programming module 1 Reversing the direction of rotation The directions of rotation of the master and slave drives can be identical or opposite, depending on the type of mechanical coupling. The direction of rotation can be matched to these requirements with the jumper 1 . Directions of rotation of master and slave drives are identical Directions of rotation of master and slave drives are opposite with jumper between X6/9 and X6/10 on slave without jumper between X6/9 and X6/10 on slave 2 Evaluation in the Emergency-stop circuit 3 Power supply via DC link circuit 4 Bus connection: connecting cable for unit's own power supply and monitoring 5 To central earthing point on power supply module 6 Number as per motor/amplifier combination 7 Slave module component set: Current limiting as per master; R1=R2=not used; C1=C2=C4=not used; R7=78k7; C3=9k09; input weighting -064 without potentiometer 8 Use 9-core connecting cable only. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 15B-MS/TDM1/S102 33 2. Functions for the user 5 A1 A1 Master KDS1.1.../S102 KDS1.1.../S104 A2 A3 A2 A3 L- L- L+ L+ End connector X1 X1 5 6 1011 12 1 4 7 8 9 2 3 M Thermostat contact 3 5 6 1011 12 1 4 7 8 9 2 3 Motor feedback Torsionally stiff mechanical coupling 1 Remarks 1 .... 16A-MS/KDS/S102/S104 see sheet 2 Fig. 16: Master-slave drive with KDS 1.1.../S102 and S104 34 Tsense 0VM MA Ired Polarizing pin U1 V1 W1 Motor feedback 1 X24 1 2 3 4 5 6 7 8 9 10 2 3 Tacho BLC 1 BLC 2 BLC 3 0VM +15VM 0VM -15VM Common controller enabling signal Tacho BLC 1 BLC 2 BLC 3 0VM X25 1 2 3 4 5 6 7 8 9 10 11 Polarizing pin U1 V1 W1 E3 E4 0VM Bb Bb RF +24VL 0VL +15VM 0VM -15VM TÜ TÜ Bb Bb RF +24VL 0VL +15VM 0VM -15VM 1 2 3 4 5 6 7 8 9 10 11 2 Thermostat contact 1 2 3 4 5 6 7 8 9 10 11 12 13 TÜ TÜ X26 1 2 3 4 5 6 7 8 9 10 11 12 13 X24 1 2 3 4 5 6 7 8 9 10 M E1 E2 Tsense E1 E2 X25 0VM 7 MA 6 Ired Programming module MOD 3/XXXXX-064 E3 E4 0VM Programming module MOD 3/XXXXX-... Set-point input X26 ....... Bus connection (black conductor always underneath) ....... ....... 4 +15VM 0VM -15VM 3 Slave KDS1.1.../S102 KDS1.1.../S104 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 8 2. Functions for the user C4 R7 E1 E2 R8 + 4k99 + 270R Set-point input C5 Speed controller 499k Tacho (master drive) Tacho R1 Tacho monitor C3 270R - Master - R2 C1 Continuous current C2 Peak current MA C4 R7 C3 78k7 9k09 4k99 270R R9 82k5 E3 270R - Slave - 7 0VM Tacho (slave drive) Tacho R1 Tacho monitor 499k R2 C1 + Speed controller Continuous current C2 MA Peak current On MOD programming module 1 Reversing the direction of rotation The directions of rotation of the master and slave drives can be identical or opposite, depending on the type of mechanical coupling. The direction of rotation can be matched to these requirements with the jumper 1 . Directions of rotation of master and slave drives are identical Directions of rotation of master and slave drives are opposite with without jumper between X24/9 and X24/10 jumper between X24/9 and X24/10 on slave on slave 2 Evaluation in the Emergency-stop circuit 3 Power supply via DC link circuit 4 Bus connection: connecting cable for unit's own power supply and monitoring 5 To central earthing point on power supply module 6 Number as per motor/amplifier combination 7 Slave module component set: Current limiting as per master; R1=R2=not used;C1=C2=C4=not used; R7=78k7; C3=9k09; input weighting -064 without potentiometer 8 Use 9-core connecting cable only. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 16B-MS/KDS/S102/S104 35 2. Functions for the user 36 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • 3. Handling the MOD programming module 3. Handling the MOD programming module The plug-in MOD programming module is used to match the drive module to the motor type. It offers the user the following distinct advantages: – The drive is put into service without time-consuming optimization and adjustments. This applies to conventional applications where the mechanical coupling to the motor is sufficiently stiff and backlash-free, and the ratio of the motor mass to the external masses referred to the motor shaft is between 1:05 and approximately 1:1.5. – During servicing the unit can be quickly replaced on site by personnel without special training since, apart from drift compensation, no adjustments and matching are required. – Repair times can thus be appreciably reduced. – Prior to commissioning check whether the data on the drive amplifier and motor rating plates correspond to those on the rating plate of the programming module. See Figs. 17 and 18 for rating plate details. 3.1. Determining the type of servo drive and motor Construction and circuit diagram are shown in Figs. 21 to 30. The motor type is matched to the drive amplifier by INDRAMAT in the factory by means of resistors and capacitors soldered onto the programming module: – peak current limiting: R3, R4 – continuous current limiting: R5, R6 – tacho filter: R1, R2, C1, C2 – speed controller circuit: R7, C3, C4 (control parameters for dynamic performance) – current controller circuit: R12, R13, C6 (for TDM 3, TDM 4, TDM 6, TDM 7 only) 3.2. Input weighting and set-point smoothing (matching to NC) When ordering, the user of the servo drive specifies the analogue interface input weighting appropriate to his NC. The input weighting of the three inputs is stated in rpm/V on the rating plate of the MOD programming module (see Fig. 18). The last three digits of the module number determine the input weightings of the set-point inputs. The following components are factory-fitted on the programming module board for input weighting and set-point smoothing: On programming modules MOD 1, MOD 3, MOD 5, MOD 13, MOD 17, MOD 19, MOD 21 with fine adjustment: – differential input E1-E2: R8 and installed wire jumper B1 – summing input E3... R9 and installed wire jumper B2 – summing input E4... R10 and installed wire jumper B3 – set-point smoothing at input E1-E2: C5 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 37 3. Handling the MOD programming module On programming modules MOD 2, MOD 4, MOD 6, MOD 14, MOD 18, MOD 20, MOD 22 with potentiometer: – differential input E1-E2: R8 and trimpot. P1 (or installed wire jumper B1), – summing input E3: R9 and trimpot. P2 (or installed wire link B2), – summing input E4: R10 and trimpot (or installed wire jumper B3). – set-point smoothing at input E1-E2: C5 3.3. Rating plates, labels and circuit diagrams Summary of diagrams relating to the MOD programming module 38 Fig. 17 Rating plate of MOD programming module Fig. 18 Type code of MOD programming module Fig. 19 Rating plate of MAC motor Fig. 20 Rating plate of servo drive module Fig. 21 Module labels : MOD 1, MOD 2 for TDM 1 drive module Fig. 22 Circuit diagram: MOD 1, MOD 2 for TDM 1 drive module Fig. 23 Module labels: MOD 5, MOD 6 for TDM 2 drive module Fig. 24 Circuit diagram: MOD 5, MOD 6 for TDM 2 drive module Fig. 25 Module labels: MOD 13, MOD 14 for TDM 3 drive module and MOD 19, MOD 20 for TDM 6 Fig. 26 Circuit diagram: MOD 13, MOD 14 for TDM 3 drive module and MOD 19, MOD 20 for TDM 6 Fig. 27 Module labels: MOD 17, MOD 18 for TDM 4 drive module and MOD 21, MOD 22 for TDM 7 Fig. 28 Circuit diagram: MOD 17, MOD 18 for TDM 4 drive module and MOD 21, MOD 22 for TDM 7 Fig. 29 Module labels: MOD 3, MOD 4 for KDS 1 drive module TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 3. Handling the MOD programming module Programming module rating plate MOD 1/1X077-002 Contr.: TDM 1.2-100-300-W1 Motor: MAC 112D-.-FD-.-C Current (A): peak/cont.: 100/75 Operating rpm: 6000 MA: 0,05 V/A Input E1/E2 E3 E4 rpm/V 2000/10 3000/10 1500/10 MOD 14/1X012-016 Contr.: TDM 3.2-020-300-W0 Motor: MAC 090A-.-ZD-.-C Current (A): peak/cont.: 20/15 Operating rpm: 2000 MA: 0,375 V/A Input rpm/V: E1/E2: 2000/10 E3: 3000/10 E4: 1500/10 The following indicate: MOD./.....-... Type designation of the programming module (see following figure for meaning) Contr. Type designation of the servo drive module Motor Part of the type designation of the motor which determines the configuration of the programming module. Parts of the type designation not affecting the configuration of the programming module are identified by full stops. Current (A) peak/cont. Set peak current/continuous current in amps Operating rpm Rated speed of motor in rpm (the maximum useful speed of the drive cannot differ from this) MA Voltage/current ratio in V/A or mV/A at output terminal MA MA E1/E2 Speed / set-point voltage ratio between differential input E1 and E2 in rpm/ V. E3 Speed / set-point voltage ratio between input E3 and 0VM in rpm/V E4 Speed / set-point voltage between input E4 and 0VM in rpm/V. Fig. 17: Rating plate of MOD programming module • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 39 3. Handling the MOD programming module Type code fields: Example: 1. Brief description of unit: MOD 01 / 1 x 0005 - 001 MOD 2. Classification according to controller type and potentiometer in the set-point input: TDM 1. ………………………………………………………………….. 01 TDM 1. with potentiometer in set-point input ………………………...02 KDS 1. …………………………………………………………………...03 KDS 1. with potentiometer in set-point input …………………………04 TDM 2. …………………………………………………………………...05 TDM 2. with potentiometer in set-point input ………………………...06 TWM 1. …………………………………………………………………..07 KDW 1. …………………………………………………………………..09 TDM 3.1 Replaced by MOD 13/14 11 TDM 3.1 as of June 1986 12 TDM 3.2 ………………………………………………………………….13 TDM 3.2 with potentiometer in set-point input ……………………….14 DSC 3. …………………………………………………………………... 15 DSC 3. with potentiometer in set-point input …………………………16 TDM 4. …………………………………………………………………... 17 TDM 4. with potentiometer in set-point input …………………………18 TDM 6. …………………………………………………………………... 19 TDM 6. with potentiometer in set-point input …………………………20 TDM 7. …………………………………………………………………... 21 TDM 7. with potentiometer in set-point input …………………………22 3. Classification according to feedback unit on MAC motor: with built-in INDRAMAT incremental encoder …………….………. "0" with tacho feedback (without incremental encoder) ………...………"1" independent of feedback unit …………………………………………"." (for „slave modules“ and „ current interface modules“) 4. Motor cooling code: natural convection …………………………………………………....… 0 surface-cooled…………………………………………………..….....… 1 module configuration suitable for both types of cooling………..……X 5. Code for motor/amplifier combination Is specified and recorded by INDRAMAT …………………z.B. 0005 6. Input weighting code Is specified and recorded by INDRAMAT ………. …...……z.B. 001 Fig. 18: Type designation of MOD programming module 40 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 3. Handling the MOD programming module MAC: 112B-0-PD-2-C/130-A-0/SO5 Serien Nr.: 38449 R1 Kom.-Nr. Dauer-Md 18.2 1 Dauerstrom Motor-EMK 21.0 1 n max Tacho-EMK Bremse: Md 37 PermanentmagnetDrehstromservomotor GmbH Lohr / Main From delivery date March 1993 89 5011 25 Nm Md Konst. Nm/A 0.91 A Spitzenstrom 97 A VS/rad Isolationsklasse F min -1 Schutzart IP 65 IP 24 1 1500 VS/rad 0.0286 U N 24 V I N 0.75A 14 Nm 1 oberflächenbelüftet ENA3A-TypschMAC typsch.tif The following indicate: MAC...: Type designation of servomotor (see Section 13 for details) Continuous Md; MdN: Continuous torque of motor in Nm Continuous current; IdN: Continuous current of motor in amps Peak current: Max. peak current of motor in amps Motor EMF; km: Current/torque constant in Nm/A or Vs Tacho EMF; tacho const: Tacho voltage in Vs, or V/rpm nmax;n: Rated speed of motor in rpm (the maximum useful speed of the drive cannot differ from this) Fig. 19: Rating plate of MAC motor Serial numbers Fig. 20: Rating plate of servo drive module • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 41 3. Handling the MOD programming module Example of MOD 2 programming module labelling Example of MOD 1 programming module labelling MOD 1/1X077-002 Input E1/E2 E3 E4 Contr.: TDM 1.2-100-300-W1 Motor: MAC 112D-.-FD-.-C Current (A): peak/cont.: 100/75 Operating rpm: 6000 MA: 0,05 V/A MOD 2/1X077-016 rpm/V 2000/10 3000/10 1500/10 Contr.: TDM 1.2-100-300-W1 Motor: MAC 112D-.-FD-.-C Current (A): peak/cont.: 100/75 Operating rpm: 6000 MA: 0,05 V/A Input E1/E2 E3 E4 rpm/V 2000/10 3000/10 1500/10 OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVICES IN USE OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR MODULE MUST AGREE WITH THE DEVICES IN USE OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR Betriebsdaten-Programmierungsmodul Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen sonst Schädigungsgefahr Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen sonst Schädigungsgefahr P1 P2 P3 (E1/E2) (E3) (E4) MOD 1 and MOD 2 programming module board layouts C1 C3 R1 R2 C2 C4 R4 R3 X2 C5 R9 R5 R6 R7 R8 R10 B1 B2 P1 P2 B3 P3 Fig. 21: Module labels: MOD 1, MOD 2 for TDM 1 drive module 42 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 3. Handling the MOD programming module Plug connector X2 2 -15VM 3 0VM 4 Peak current limiting 1 R3 R4 R5 R6 R1 R2 5 Continuous current limiting -15V 7 Tacho filter 6 C1 C3 Speed controller P-I circuit R7 8 9 C4 R8 10 Differential input E1/E2 P1 11 C5 B1 R9 13 Summing input E3 C2 P2 12 B2 R10 15 Summing input E4 14 P3 B3 Potentiometers P1, P2, P3 are not fitted to MOD 1 but shunted by B1, B2, B3 Fig. 22: Circuit diagram: MOD 1, MOD 2 for TDM 1 drive module • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 43 3. Handling the MOD programming module Example of MOD 6 programming module labelling Example of MOD 5 programming module labelling MOD 5/1X026-185 Input E1/E2 E3 E4 Contr.: TDM 2.1-30-300-W0 Motor: MAC 063D-.-RS-.-C Current (A): peak/cont.: 17/7 Operating rpm: 6000 MA: 0,25 V/A MOD 6/1X026-031 rpm/V 3500/9 3000/10 1500/10 Contr.: TDM 2.1-30-300-W0 Motor: MAC 063A-.-RS-.-C Current (A): peak/cont.: 17/7 Operating rpm: 6000 MA: 0,25 V/A Input E1/E2 E3 E4 rpm/V 3500/9 3000/10 1500/10 OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVICES IN USE OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR MODULE MUST AGREE WITH THE DEVICES IN USE OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR Betriebsdaten-Programmierungsmodul Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen sonst Schädigungsgefahr Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen sonst Schädigungsgefahr P1 P2 P3 (E1/E2) (E3) (E4) MOD 5 and MOD 6 programming module board layouts C1 C3 R1 R2 C2 C4 R4 R3 X2 C5 R9 R5 R6 R7 R8 R10 B1 B2 P1 P2 B3 P3 Fig. 23: Module labels: MOD 5, MOD 6 for TDM 2 drive module 44 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 3. Handling the MOD programming module Plug connector X2 2 -15VM 3 0VM 4 Peak current limiting 1 R3 R4 R5 R6 R1 R2 5 Continuous current limiting -15V 7 Tacho filter 6 C1 C3 Speed controller P-I circuit C4 10 Differential input E1/E2 11 C5 13 Summing input E3 R7 8 9 C2 12 R8 P1 B1 R9 P2 B2 15 Summing input E4 14 R10 P3 B3 Potentiometers P1, P2, P3 are not fitted to MOD 5 but shunted by B1, B2, B3 Fig. 24: Circuit diagram: MOD 5, MOD 6 for TDM 2 drive module • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 45 3. Handling the MOD programming module Example of MOD 14 programming module labelling Example of MOD 13 programming module labelling MOD 13/1X012-002 Contr.: TDM 3.2-020-300-W0 Motor: MAC 090A-.-ZD-.-C Current (A): peak/cont.: 20/15 Operating rpm: 2000 MA: 0,375 V/A Input rpm/V: E1/E2: 2000/10 E3: 3000/10 E4: 1500/10 MOD 14/1X012-016 Contr.: TDM 3.2-020-300-W0 Motor: MAC 090A-.-ZD-.-C Current (A): peak/cont.: 20/15 Operating rpm: 2000 MA: 0,375 V/A Input rpm/V: E1/E2: 2000/10 E3: 3000/10 E4: 1500/10 OPERATING PARAMETERPROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVICES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE. OPERATING PARAMETER-PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVICES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE. Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr P2 P3 (E1/E2) (E3) (E4) P1 [ ] [ ] [ ] [ ] [ ] R12 R13 R10 [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] R9 R11 [ ] R14 P2 R15 R16 P3 R1 R2 R3 R4 R5 R6 [ ] [ ] [ ] [ ] [ ] [ ] [ ] R8 [ ] [ ] [ ] [ ] [ ] [ ] [ ] R7 [ ] C7 [ ] [ ] [ ] [ ] [ ] [ ] C2 P1 C5 [ ] C4 [ ] [ ] [ ] C1 C3 [ ] MOD 13 and MOD 14 programming module board layouts C6 a b X2 16 1 Fig. 25: Module labels: MOD 13, MOD 14 for TDM 3 drive module MOD 19, MOD 20 for TDM 6 46 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 3. Handling the MOD programming module 0VM 16ab R12 Current controller P-I circuit R13 C6 R3 R4 8b 8a Peak current limiting 13ab Continuous current limiting -15VM 14ab 12ab R5 R6 15ab 10ab C7 Tacho filter R1 R2 11ab C1 R11 9ab Speed controller P-I circuit 7a Differential input E1/E2 6ab C3 C2 R7 C4 7b R8 P1 5ab C5 5R11 R14 R9 Summing input E3 4ab P2 3ab 5R11 R15 R10 Summing input E4 2ab P3 1ab 5R11 R16 Potentiometers P1 - P3 are not fitted to MOD 13 Resistors R14, R15, R16 are not fitted to MOD 14 Fig. 26: Circuit diagram: MOD 13, MOD 14 for TDM 3 drive module, MOD 19, MOD 20 for TDM 6 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 47 3. Handling the MOD programming module Example of MOD 18 programming module labelling Example of MOD 17 programming module labelling Contr.: MOD 17/1X001-193 TDM 4.1-020-300-W0 MOD 18/1X001-083 Contr.: TDM 4.1-020-300-W0 Motor: MAC 025C-.-QS-.-E Current (A): peak/cont.: 14/7 Operating rpm: 10000 MA: 0,375 V/A Input rpm/V: E1/E2: 10000/10 E3: 10000/10 E4: ------- Motor: MAC 025C-.-QS-.-E Current (A): peak/cont.: 14/7 Operating rpm: 10000 MA: 0,375 V/A Input rpm/V: E1/E2: 10000/10 E3: 10000/10 E4: -------- OPERATING PARAMETERPROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVICES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE. OPERATING PARAMETER-PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVICES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE. Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr P2 P3 (E1/E2) (E3) (E4) P1 [ ] [ ] [ ] [ ] [ ] R12 R13 R10 [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] R9 R11 [ ] R14 R15 R16 P3 R1 R2 R3 R4 R5 R6 [ ] [ ] [ ] [ ] [ ] [ ] P2 [ ] R8 [ ] [ ] [ ] [ ] [ ] [ ] [ ] R7 [ ] C7 [ ] [ ] [ ] [ ] [ ] [ ] C2 P1 C5 [ ] C4 [ ] [ ] [ ] C1 C3 [ ] MOD 17 and MOD 18 programming module board layouts C6 a b X2 16 1 Fig. 27: Module labels: MOD 17, MOD 18 for TDM 4 drive module, MOD 21, MOD 22 for TDM 7 48 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 3. Handling the MOD programming module 0VM 16ab R12 Current controller P-I circuit R13 C6 R3 R4 8b 8a Peak current limiting 13ab Continuous current limiting -15VM 14ab 12ab R5 R6 15ab 10ab C7 Tacho filter R1 R2 11ab C1 R11 C2 9ab C3 Speed controller P-I circuit 7a Differential input E1/E2 6ab R7 C4 7b R8 P1 5ab C5 5R11 R14 R9 Summing input E3 4ab P2 3ab 5R11 R15 R10 Summing input E4 2ab P3 1ab 5R11 R16 Potentiometers P1 - P3 are not fitted to MOD 17 Resistors R14, R15, R16 are not fitted to MOD 18 Fig. 28: Circuit diagram: MOD 17, MOD 18 for TDM 4 drive module, MOD 21, MOD 22 for TDM 7 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 49 3. Handling the MOD programming module Example of MOD 4 programming module labelling Example of MOD 3 programming module labelling OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVICES IN USE OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR MODULE MUST AGREE WITH THE DEVICES IN USE OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR Betriebsdaten-Programmierungsmodul Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen sonst Schädigungsgefahr Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen sonst Schädigungsgefahr P1 P2 (E1/E2) (E3) Input E1/E2 E3 E4 (E4) MOD 4/1X022-016 MOD 3/1X022-002 Contr.: KDS 1.1-150-300-W1 Motor: MAC 112D-.-FD-.-C Current (A): peak/cont.: 130/55 Operating rpm: 2000 MA: 0,05 V/A P3 rpm/V 2000/10 3000/10 1500/10 Contr.: KDS 1.1-150-300-W1 Motor: MAC 112D-.-FD-.-C Current (A): peak/cont.: 130/55 Operating rpm: 2000 MA: 0,05 V/A Input E1/E2 E3 E4 MOD 3 and MOD 4 programming module board layouts C1 C3 C2 R3 R4 R1 R2 P3 R11 P1 P2 B3 B1 C6 C4 R10 R9 R8 R6 R5 R7 C5 B2 C7 X2 Fig. 29: Module labels: MOD 3, MOD 4 for KDS 1 drive module 50 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 rpm/V 2000/10 3000/10 1500/10 3. Handling the MOD programming module Plug connector X2 14b -15VM 14a 0VM 12b Peak current limiting 16b R3 R4 R5 R6 R1 R2 12a Continuous current limiting -15V 10a Tacho filter 16a R11 C1 C2 2b C3 Speed controller P-I circuit 8a C4 R8 6a Differential input E1/E2 P1 8b C5 C6 C7 6b Summing input E3 R7 10b 4a B1 R9 P2 B2 4b Summing input E4 2a R10 P3 B3 Potentiometers P1, P2, P3 are not fitted to MOD 3 but shunted by B1, B2, B3 Fig. 30: Circuit diagram: MOD 3, MOD 4 for KDS 1 drive module • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 51 4. User inputs/outputs 4. User inputs/outputs Terminal on servo drive module: Maximum values of applied DC voltage TDM 1 TDM 2 TDM 3 TDM 6 TDM 4 TDM 7 KDS1 Input Function X5/1 -X5/2 X42/1 -X42/2 X50/1 -X50/2 X26/1 -X26/2 E1-E2 Differential input for set-point - 10 to + 10 volts X5/3 X42/4 X50/4 X26/4 E3 Summing input for set-point with respect to 0VM - 10 to + 10 volts X5/4 X42/5 X50/5 X26/5 E4 Summing input for set-point with respect to 0VM - 10 to + 10 volts X5/7 X43/3 X49/3 X25/3 RF Controller enable not active. 0 to 3 Volt or After controller enabling signal open input is disconnected only differential input is immediately set to zero internally. The drive still remains under active control for about 300 ms after the controller enabling signal is switched off. Controller enabling signal active. 3 to 30 volts Drive under control (0,3 to 3 mA) X5/13 X42/8 X50/8 X26/8 Ired External torque and current limiting by applying an analogue voltage 0 to 10 volts (see Section 2.3) Fig. 31: Servo drive module inputs Input at RF terminal (external controller enable) 3 … 30V 0V Drive on Drive free of torque Internal enable 300 ms Ext. set-point at terminal E1 - E2 Set-point conditioning Set-point switched internally to 0 rpm ENA7A-verzAb Fig. 32: Delayed disconnection of controller enabling signal 52 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 0V 4. User inputs/outputs Terminal on servo drive module: TDM 1 TDM 2 TDM 3 TDM 6 TDM 4 TDM 7 KDS1 Output Function Maximum values of DC voltage/current X5/5 -X5/6 X43/1 -X43/2 X49/1 -X49/2 X25/1 -X25/2 Bb - Bb Signals ready state of drive if contact is closed. Servo drive is OK. (Do not confuse this message with the Bb1 contact of the power supply module) Relay contact rated for 24 V/1 A max. X5/10 X5/12 X43/7 X43/9 X49/6 X49/8 X25/7 X25/9 + 15 VM - 15 VM Control voltage for external use 15 mA max. X5/11, X43/8 X49/7 X25/8 0 VM Reference potential for all inputs/outputs except E1-E2 and Bb-Bb X5/14 X42/10 X50/10 X26/10 MA Master output, torque of current set-point for Measurement of drive performance or as set-point output signal for slave drive in a master/slave drive system (see Section 2.4) Max. output 0 to 10 V, 1 mA (See footnote (1) for kMA weighting) X5/15 X42/13 X50/13 X26/13 Tsense Speed actual-value (tacho) Max. output 0 to 10 V (See footnote (2) for weighting) —— —— —— X25/10 -X25/11 TÜ-TÜ Output signals unit is overheating (Temperature pre-warning), if contact is open. Relay contact rated for 24 V, 1 A max. —— X43/10 X49/9 —— TÜ Output signals unit is overheating (temperature pre-warning) if open-collector output is low resistance at 0 V. Drive package is switched off after 30 seconds. Weighting values 24V, 100 mA max. (1) Weighting kMA of this output MA can be obtained from the rating plate of the programming module under „MA“ in V/A or the table in Section 10.2. The torque can be can calculated from this as follows: U(MA) M = km * ——— kMA in Nm km: current torque constant in Nm/A from Section 10.1 U(MA): voltage V measured at MA output (2) The internal resistance of the output is 20 kilohms. The weighting of this output depends on the rated speed of the motor (obtainable from Section 10.1 or rating plate): Max. motor speed in rpm 1600 3200 6400 12000 Rating plate details (Motor) in Vs/ rad Tacho voltage at Tsense output in volts per 1000 rpm 0,0572 0.0286 0.0143 0.00715 6 3 1.5 0.75 Fig. 33: Servo drive module outputs • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 53 5. Connections and Installation 5. Connections and Installation 5.1. Protection of Personnel and Equipment The guidelines as listed in Chapter 6.1 on protection of personnel, equipment and machinery when connecting, assembling and testing the drives must be followed. 5.2. Assembly 5.2.1. Preferred arrangement of modular units within the control cabinet Both the servo drive module and its supply module are flush mounting equipment, as outlined in DIN VDE 0160, Sections 5.5.1.3 and 6.5.1.3. This means that they are intended for mounting in a control cabinet. IP 10 is their protection category. The control cabinet housing should, in accordance with those safety guidelines valid for this application, guarantee sufficient protection against hazards in areas where the general public has access. (For industrial applications, e.g, see EN 60204/DIN VDE 0113, Section 1.) Only properly trained personnel with proper tools or keys should have access to the interior of the control cabinet. The modular units should, if possible, be arranged as depicted in Figure 34. The drives with high power and voltages should be located as close as possible to the supply unit. If the ventilated servo drive modules TDM3 and TDM 4 (type designation TDM 3.2-030-300-W1, or TDM 4.1-030-300-W1) or TDM 6 and TDM 7 (type designation TDM 6.1-025-300-W1, or TDM 7.1-025-300-W1) – are arranged on the left side of the drive packet, or, – are mounted on the left side at a distance greater than 10 mm from an adjacent module, then a cooling baffle (INDRAMAT mat. no. 224 869) must be screwed onto the heatsink on the left side of the unit. (Also see the dimensions sheet for the servo-drive module.) Only this arrangement guarantees that the fan will provide sufficient cooling. The end plug, found in the accessories set of the supply module, is plugged into contact strip X1 located in the unit farthest away from the supply module. It monitors the line connection X1. It is also possible to arrange the drive module with supply modules on the right and line up the drive modules on the left. 54 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation TBM or TCM KDV or TVM KDA 2 twisted lines KDS TDM 1 TDM 2 MOD MOD MOD TCM TCM TDM TDM TDM 3 3 4 M O D M O D TCM M O D ENA3A-Anordnung Figure 34: The preferred drive module arrangement 5.2.2. Front View with Accessories Figures 35 through 40 depict a front view of the individual servo drive modules with electrical connecting accessories and programming module MOD. The components needed for the electrical connections are a part of the „electrical connecting accessories“ supplied by INDRAMAT. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 55 5. Connections and Installation Servo drive module X8 RESET AC POWER OUTPUT Motoranschluß DANGER HIGH VOLTAGE A2 Electrical connecting accessories and programming module S1 +24V ±15V BLC1 BLC2 BLC3 Tacho A1 POWER RF Bb TS BS A3 WARNING 300 VDC INPUT DISCHARGE TIME Entladezeit > 1 Min. POWER SUPPLY OUTPUT VOLTAGE RATING, MUST NOT EXCEED POWER INPUT VOLTAGE DATA Nur mit Versorgungseinheit gleicher od. kleinerer POWER-Spannungsangabe betreiben L- Busbar L+ Spannungs- und isolationsgeprüft nach DIN VDE 0160 Bus connection X1 ATTENTION! NEVER REMOVE OR INSTALL THIS PLUGS WHILE VOLTAGE IS APPLIED. BLACK CABLE ON THE BOTTOM! Verbindung nie unter Spannung lösen bzw. stecken. Schwarze Leitung immer unten! AC SERVO CONTROLLER TDM ...-30-300-W0 236226 K39/91 X1 SN240060-02029 A01 Programming Module MOD with Rating Plate Contr.: TDM 1.2-100-300-W1 Motor: MAC 112D-.-FD-.-C Current (A): peak/cont.: 100/75 Operating rpm: 2000 MA: 0,05 V/A MOD 1/1X077-002 Input rpm/V E1/E2 2000/10 E3 2000/10 E4 2000/10 POSITION FOR OPERATING PARAMETER PROGRAMMING MODULE, PLUG IN CORRECT MODULE, BEFORE START UP Platz für Betriebsdaten-Programmierungsmodul. Vor dem Einschalten korrektes Modul einstecken. OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVISES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR X2 Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Offset adjustment Installation übereinstimmen, sonst Schädigungsgefahr. X5 Plug-in terminal ZERO ADJ Input - Output +15V 0VM -15V E1 E2 E3 E4 Bb Bb Tacho RF BLC1 0VM BLC2 +15V BLC3 0VM 0VM -15V Ired MA Tsense 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 X6 Feedback ENA3A-FrontanTDM1/2 Figure 35: Front view of servo drive modules TDM1 and TDM2 with accessories 56 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Servo drive module Spannungs- und isolationsgeprüft nach DIN VDE 0160 HIGH VOLTAGE WITHOUT POWER DO NOT OPERATE X8 Motoranschluß A1 A2 DISCHARGE TIME DANGER Entladezeit > 1 Min. MOTOR POWER Electrical connecting accessories and programming module RESET S1 A3 Busbar L- +24V ±15V BLC1 BLC2 BLC3 Tacho PWR RF Bb TS BS 300 VDC INPUT AS Bus connection X1 L+ ATTENTION! NEVER REMOVE OR INSTALL THIS PLUGS WHILE VOLTAGE IS APPLIED. BLACK CABLE ON THE BOTTOM! Verbindung nie unter Spannung lösen bzw. stecken. Schwarze Leitung immer unten! AC SERVO CONTROLLER TDM 3.2-020-300-W0 236226 K39/91 X1 SN240060-02029 A01 POSITION FOR OPERATING PARAMETER PROGRAMMING MODULE, PLUG IN CORRECT MODULE, BEFORE START UP Platz für Betriebsdaten-Programmierungsmodul. Vor dem Einschalten korrektes Modul einstecken. Programming Module MOD with Rating Plate MOD 13/1X012-002 Contr.: TDM 3.2-020-300-W0 Motor: MAC 090A-.-ZD-.-C Current (A): peak/cont.: 20/15 Operating rpm: 2000 MA: 0,375 V/A Input rpm/V: E1/E2: 2000/10 E3: 3000/10 E4: 1500/10 Offset adjustment OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVISES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR 6 7 8 8 X43 Bb Bb RF +24VL 0VL 7 9 9 10 1 2 3 4 5 6 7 8 9 10 Input - Output 1 2 3 4 5 6 7 8 9 10 11 12 13 Iist Tsense 5 6 Ired FB MA 4 5 E3 E4 0VM +15VM 3 4 X42 2 3 E1 E2 1 2 +15VM 0VM -15VM TÜ 1 2 3 4 5 6 7 8 9 Feedback Plug-in terminals 1 BLC 1 BLC 2 BLC 3 0VM Tacho X41 Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr. +15VM 0VM -15VM ZERO ADJ 1 2 3 4 5 6 7 8 9 10 11 12 13 Input - Output ENA3A-FrontanTDM3 Figure 36: Front view of servo drive module TDM 3 with accessories • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 57 5. Connections and Installation Servo Drive Module Spannungs- und isolationsgeprüft nach DIN VDE 0160 DO NOT OPERATE WITHOUT POWER X8 A2 DISCHARGE TIME DANGER Entladezeit > 1 Min. MOTOR POWER Electrical Connecting Accessories and Programming Module A3 Busbar RESET S1 HIGH VOLTAGE Motoranschluß A1 L- +24V ±15V BLC1 BLC2 BLC3 Tacho PWR RF Bb TS BS 300 VDC INPUT AS Bus connection X1 L+ ATTENTION! NEVER REMOVE OR INSTALL THIS PLUGS WHILE VOLTAGE IS APPLIED. BLACK CABLE ON THE BOTTOM! Verbindung nie unter Spannung lösen bzw. stecken. Schwarze Leitung immer unten! AC SERVO CONTROLLER TDM 4.1-020-300-W0 236226 Programming Module MOD with Rating Plate K39/91 POSITION FOR OPERATING PARAMETER PROGRAMMING MODULE, PLUG IN CORRECT MODULE, BEFORE START UP Platz für Betriebsdaten-Programmierungsmodul. Vor dem Einschalten korrektes Modul einstecken. MOD 17/1X001-193 Contr.: TDM 4.1-020-300-W0 Motor: MAC 025C-.-QS-.-E Current (A): peak/cont.: 14/7 Operating rpm: 10000 MA: 0,375 V/A Input rpm/V: E1/E2: 10000/10 E3: 10000/10 E4: ---------- OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVISES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR 3 4 5 6 7 HS 1 HS 2 HS 3 +15VM 0VM X48 8 9 10 X49 Bb Bb RF 24VL 0VL +15VM 0VM -15VM TÜ 2 T0 T1 T2 T3 1 2 3 4 5 6 7 8 9 10 Feedback Plug-in terminals 1 Offset adjustment ZERO ADJ Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr. X1 SN241060-02030 A01 5 6 3 4 5 6 7 8 7 8 9 1 2 9 10 11 12 13 Iist Tsense 4 Ired FB MA 3 E3 E4 0VM +15VM 2 E1 E2 1 X50 1 2 3 4 5 6 7 8 9 Input - Output 1 2 3 4 5 6 7 8 9 10 11 12 13 Input - Output ENA3A-FrontanTDM4 Figure 37: Front view of servo drive module TDM 4 with accessories 58 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Plug-in terminals 4 5 6 7 8 9 10 11 12 13 14 Servo drive module 15 Spannungs- und isolationsgeprüft nach DIN VDE 0160 X8 DO NOT OPERATE WITHOUT POWER 3 TMO TMO BRI+ BRIBROBRO+ TMI TMI 2 ASQ ASQ AS2 AS1 frei 1 A2 DISCHARGE TIME DANGER Entladezeit > 1 Min. MOTOR POWER Electrical Connecting Accessories and Programming Module RESET S1 HIGH VOLTAGE Motoranschluß A1 A3 Busbar L- +24V ±15V BLC1 BLC2 BLC3 Tacho PWR RF Bb TS BS 300 VDC INPUT AS Bus connection X1 L+ ATTENTION! NEVER REMOVE OR INSTALL THIS PLUGS WHILE VOLTAGE IS APPLIED. BLACK CABLE ON THE BOTTOM! Verbindung nie unter Spannung lösen bzw. stecken. Schwarze Leitung immer unten! AC SERVO CONTROLLER TDM 6.1-020-300-W0 236226 K39/91 X1 SN240060-02029 A01 POSITION FOR OPERATING PARAMETER PROGRAMMING MODULE, PLUG IN CORRECT MODULE, BEFORE START UP Platz für Betriebsdaten-Programmierungsmodul. Vor dem Einschalten korrektes Modul einstecken. programming Module MOD with Rating Plate MOD 19/1X012-002 Contr.: TDM 6.1-020-300-W0 Motor: MAC 090A-.-ZD-.-C Current (A): peak/cont.: 20/15 Operating rpm: 2000 MA: 0,375 V/A Input rpm/V: E1/E2: 2000/10 E3: 3000/10 E4: 1500/10 OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE ZERO ADJ 5 6 7 8 8 9 9 10 1 2 3 4 5 6 7 8 9 10 11 12 13 +15VM 0VM -15VM TÜ 7 X43 6 1 2 3 4 5 6 7 8 9 10 Input - Output Ired FB MA Iist Tsense 4 5 E3 E4 0VM +15VM 3 4 X42 2 3 E1 E2 1 2 Bb Bb RF +24VL 0VL 1 2 3 4 5 6 7 8 9 Feedback Plug-in terminals 1 Offset adjustment BLC 1 BLC 2 BLC 3 0VM Tacho Installation übereinstimmen, sonst Schädigungsgefahr. X41 Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der +15VM 0VM -15VM MODULE MUST AGREE WITH THE DEVISES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR 1 2 3 4 5 6 7 8 9 10 11 12 13 Input - Output FrontanTDM6 Figure 38: Front view of servo drive module TDM 6 with accessories • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 59 5. Connections and Installation Plug-in terminals 5 6 7 8 9 10 11 12 13 14 15 Servo drive module Spannungs- und isolationsgeprüft nach DIN VDE 0160 X8 DO NOT OPERATE 4 HIGH VOLTAGE WITHOUT POWER 3 TMO TMO BRI+ BRIBROBRO+ TMI TMI 2 ASQ ASQ AS2 AS1 frei 1 Motoranschluß A1 A2 DISCHARGE TIME DANGER Entladezeit > 1 Min. MOTOR POWER Electrical Connecting Accessories and Programming Module A3 Busbar RESET S1 L- +24V ±15V BLC1 BLC2 BLC3 Tacho PWR RF Bb TS BS 300 VDC INPUT AS Bus connection X1 L+ ATTENTION! NEVER REMOVE OR INSTALL THIS PLUGS WHILE VOLTAGE IS APPLIED. BLACK CABLE ON THE BOTTOM! Verbindung nie unter Spannung lösen bzw. stecken. Schwarze Leitung immer unten! AC SERVO CONTROLLER TDM 7.1-020-300-W0 236226 Programming Module MOD with Rating Plate K39/91 POSITION FOR OPERATING PARAMETER PROGRAMMING MODULE, PLUG IN CORRECT MODULE, BEFORE START UP Platz für Betriebsdaten-Programmierungsmodul. Vor dem Einschalten korrektes Modul einstecken. MOD 21/1X005-123 Contr.: TDM 7.1-020-300-W0 Motor: MAC 025C-.-QS-.-E Current (A): peak/cont.: 14 / 7 Operating rpm: 10000 MA: 0,375 V/A Input rpm/V: E1/E2: 10000/10 E3: 10000/10 E4: ---------- OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVISES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR 3 4 5 6 7 8 HS 1 HS 2 HS 3 +15VM 0VM X48 9 X49 Bb Bb RF 24VL 0VL +15VM 0VM -15VM TÜ 2 T0 T1 T2 T3 1 2 3 4 5 6 7 8 9 10 Feedback Plug-in terminals 1 Offset adjustment ZERO ADJ Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr. X1 SN241060-02030 A01 10 5 6 7 8 9 1 2 5 6 7 8 9 10 11 12 13 Tsense 4 4 Ired FB MA Iist 3 3 E3 E4 0VM +15VM 2 E1 E2 1 X50 1 2 3 4 5 6 7 8 9 Input - Output 1 2 3 4 5 6 7 8 9 10 11 12 13 Input - Output FrontanTDM7 Figure 39: Front view of servo drive module TDM 7 with accessories 60 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Servo drive module in cold-running technology X8 RESET S1 S1 A1 AC POWER OUTPUT Motoranschluß DANGER HIGH VOLTAGE A2 Electrical Connecting Accessories and Programming Module +24V ±15V BLC1 BLC2 BLC3 Tacho POWER RF Bb A3 WARNING 300 VDC INPUT DISCHARGE TIME Entladezeit > 1 Min. POWER SUPPLY OUTPUT VOLTAGE RATING, MUST NOT EXCEED POWER INPUT VOLTAGE DATA Nur mit Versorgungseinheit gleicher od. kleinerer POWER-Spannungsangabe betreiben LBusbar Bus connection X1 L+ Spannungs- und isolationsgeprüft nach DIN VDE 0160 ATTENTION! NEVER REMOVE OR INSTALL THIS PLUGS WHILE VOLTAGE IS APPLIED. BLACK CABLE ON THE BOTTOM! Verbindung nie unter Spannung lösen bzw. stecken. Schwarze Leitung immer unten! CONTROLLER AC SERVO KDS 1.1-100-300-W1 BS TS TÜ 236226 K39/91 X1 SN255060-02060 A01 Programming Module MOD with Rating Plate OPERATING PARAMETER: PROGRAMMING MODULE ATTENTION: MOTOR AND CONTROLLER-TYPE INDICATED ON THE MODULE MUST AGREE WITH THE DEVISES IN USE. OTHERWISE LACK OF PERFORMANCE AND DANGER OF DAMAGE MAY OCCUR Betriebsdaten-Programmierungsmodul Achtung: Motor- und Verstärkertypenangaben müssen mit der Installation übereinstimmen, sonst Schädigungsgefahr. POSITION FOR OPERATING PARAMETER PROGRAMMING MODULE, PLUG IN CORRECT MODULE, BEFORE START UP Platz für Betriebsdaten-Programmierungsmodul. Vor dem Einschalten korrektes Modul einstecken. MOD 3/1X077-002 Input rpm/V E1/E2 2000/10 E3 2000/10 E4 2000/10 Plug-in terminals BLC3 BLC2 0VM Offset adjustment TÜ TÜ 10 -15V Input - Output 1 2 3 4 5 6 7 8 9 10 11 1 2 3 4 5 6 X25 7 8 9 10 11 2 3 4 5 6 7 8 9 10 0VM MA Ired 0VM E4 E3 E2 E1 X3 1 ZERO ADJ Tsense 9 0VM 8 +15V 7 X24 5 6 7 8 9 10 0VL 6 4 24VL 5 RF 4 Bb 3 Bb 2 BLC1 Feedback 1 2 3 1 Tacho -15V 0VM X2 +15V Contr.: KDS 1.1-100-300-W1 Motor: MAC 112D-.-FD-.-C Current (A): peak/cont.: 100/75 Operating rpm: 2000 MA: 0,15 V/A X26 Input - Output 11 12 13 1 2 3 4 5 6 7 8 9 10 11 12 13 ENA3A-FrontanKDS Figure 40: Front view of servo drive module KDS1 with accessories • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 61 5. Connections and Installation 5.2.3. Servo drive module KDS in cold-running technology Servo drive module KDS in cold-running technology has the advantage that most of the heat loss of the modular units is fed directly out and does not accumulate inside the control cabinet. This is why the cold-runnng technology version can be built into small cabinets or housing without necessitating the extensive transmission of heat via an expensive heat exchanger. Ventilation can be forced using an external fan, which can be supplied as an additional set, if power requirements are greater. external internal The electrical parts of the ventilation are protectively located within the control cabinet, as depicted in Figure 41. The heatsink of the power section and the fan rotor are outside of the control cabinet or housing. fan hood heat loss Servo drive module KDS heatsink ext. fan Fan motor completely sealed housing or cabinet ENA3A-KDS/Verlust Figure 41: The KDS servo drive module KDS cold module drive in cold-running technology built into control cabinet The units are mounted by means of a mounting frame in a space on the back wall of the control cabinet in such a way that the drive heatsink with panelling juts out of the control cabinet. The opening in the control cabinet is tightly sealed with a gasket at the mounting flange of the cold-running version (see mounting drawing, Figure 52, in Chapter 5.2.4). The servo drive module and the external fan are mounted and can be exchanged on the inside of the control cabinet. 62 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation 5.2.4. Power Reduction for Increased Temperature and Installation Altitude The data listed on the data sheets and selection lists are valid without restriction, if the servo drive module is operated within an ambient temperature range inside the control cabinet of +5 to +45°C. Maximum permissible ambient temperature is +55°C. The values for mean motor current and torque listed in the data sheets are reduced by 2% per degree Celsius or Kelvin of temperature change within the temperature range of +45 ... 55°C. Maximum mounting altitude is 1000 meters above sea level. The following diagram depicts the reduction in values for mean motor current and torque at higher altitudes: Altitude factor [%] 100 80 60 40 20 0 0 1000 2000 3000 4000 5000 Assembly altitude above sea level [m] HöhenReduz Figure 41a: Altitude-dependent reduction in drive data. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 63 5. Connections and Installation 5.2.5. Dimensions sheet and mounting dimensions for servo drive modules The following figures list mounting dimensions and outline the mounting of the servo drive modules: Overview of Dimensions Data Dimension sheet: Figure: ——————————————————————————––––––––– Dimension sheet TDM 1, TDM 2 Fig. 42 Mounting dimensions TDM 1, TDM 2 Fig. 43 Dimension sheet TDM 3, TDM 4, Dimension sheet TDM 6, TDM 7 Dimensions for fan attached to modular units TDM 3, TDM 4, TDM 6, TDM 7 Mounting dimensions TDM 3, TDM 4, TDM 6, TDM 7 Assembly TDM 1, TDM 2, TDM 3, TDM 4, TDM 6, TDM 7 Fig. 44 Fig. 45 Fig. 46 Fig. 47 Fig. 48 Dimension sheet KDS 1 Fig. 49 Dimensions for available space and arrangement KDS 1 Fig. 50 Mounting dimensions KDS 1 Fig. 51 Assembly KDS 1 Fig. 52 ———————————————————————————–––––––– The minimum clearance to adjacent units must be absolutely maintained to guarantee sufficient heat transmission and circulation. The temperature within the mounting area (interior) of the control cabinet should not exceed 45°C. Forced ventilation, to avoid dammed up heat, as well as a reduction in the max. unit current, by 2.5% / K., become necessary with higher values, up to max. 55°C. If a cing device is used, then the internal temperature of the control cabinet must be maintained at a minimum of 2 degrees Celsius above external temperatures to prevent bedewing. Bedewing of a printed circuit board can cause drive failure. Heat-producing built-in parts should not be installed directly underneath the servo drive module. 64 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 a minimum of 80 mm for ventilating air inlet safety guard 355 20 Starting torque M (Nm) for terminal bolt: M6 = 5 Nm A Starting torque M A (Nm) for terminal bolt: M5 = 3 Nm Starting torque M A (Nm) for terminal bolt: M5 = 1,5 Nm ventilating air inlet only applies to model with fan ventilating air outlet 325 12 60 X6 X5 X2 105 7 7 373 9 a minimum 80 mm for ventilating air outlet 5. Connections and Installation ENA3A-TDM1/2/Maßblatt aus 109-0525-3002-3 Figure 42: Dimension sheet for TDM 1 and TDM 2 65 390 17 390 373 completely sealed housing or cabinet 325 min. 80 355 min. 400 min. 2 min. 80 TVM TDM TDM 7 60 TDM 105 TDM 105 ENA3A-TDM1/Einbau min. 80 5. Connections and Installation min. 80 Figure 43: Mounting dimensions for TDM 1 and TDM2 66 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 X1 70 ZERO-ADJ 7 Programmung module X8 L+ L- A3 A2 Zero-point adjustment speed control Controller current supply LED -Display RESET Starting torque MA (Nm) for terminal bolts : M5 = 3 Nm Starting torque MA (Nm) for terminal bolt X8: M6 = 5 Nm Starting torque MA (Nm) for terminal bolt X8: M5 = 3 Nm Feedback max. 1,5 mm Ready-to-operate and control voltages max. 1,5 mm Set-point max. 1,5 mm Direct current voltage ( 2 x M5 ) Motor connection ( 3 x M6 ) S1 A1 373 +1 9 ventilating air inlet 326 heatsink ventilating air outlet 325 safety guard 80 mm minimum for ventilating air outlet 80 mm minimum for ventilating air inlet 355 A cooling baffle is only then required, if the unit - is located on the left side of the drive package, or, - is mounted on the view without guard left side with a distance 12 greater than 10 mm from an 7 adjacent unit. 5 (Cooling baffle with screws INDRAMAT mat. no.: 224 869 must be ordered separately.) M5 5. Connections and Installation TDM3/4/Maßblatt Figure 44: Dimension sheet for TDM 3 and TDM4 67 390 TDM6/7/Maßblatt Figure 45: Dimension sheet for TDM 6 and TDM7 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 Safety guard Operating inputs, messages 15 poles, max. 1,5 mm 2 Feedback max. 1,5 mm Ready-to-operate and control voltages max. 1,5 mm Set-point max. 1,5 mm Direct current voltage ( 2 x M5 ) Motor connection ( 3 x M6 ) X1 S1 70 7 Programming module ZERO-ADJ X8 L+ L- A3 A2 A1 Zero-point adjustment speed control Controller current supply LED -Display RESET M5 128 5 48 7 view without guard 12 373 +1 9 68 Safety guard 80 mm minimum for ventilating air outlet 80 mm minimum for ventilating air inlet Starting torque MA (Nm) for terminal bolt : M5 = 3 Nm Starting torque MA (Nm) for terminal bolt X8: M6 = 5 Nm Starting torque MA (Nm) for terminal bolt X8: M5 = 3 Nm 326 ventilating air inlet heatsink ventilating air outlet 325 355 A cooling baffle is only then required, if the controller - is located on the left side left side of the drive package, or, - is mounted on the left side with a distance greater than 10 mm from an adjacent unit. (Cooling baffle with screws INDRAMAT mat. no.: 224 869 must be ordered separately) 5. Connections and Installation 390 5. Connections and Installation Standard model 24V-Connection TDM ... min. 200 80 Fan unit LE 5-024 (24V-Fan) 61 65,5 290,5 Obsolete model TDM ... min. 200 F7 X73 80 Fan unit LE 5 (115V- or 220V-Fan) X74 290,5 61 65,5 LE5 Fig. 46: Dimensions for mounted fan TDM 3, TDM 4, TDM 6, TDM 7 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 69 min. 80 5. Connections and Installation 390 70 7 105 60 completely sealed housing or cabinet 325 min. 80 355 min. 400 min. 2 min. 80 TVM 92±0,5 TDM TDM TDM TDM 74±0,5 TDM 373 min. 80 TDM3/4/Einbau Figure 47: Diagram for flush mounting in TDM3, TDM4, TDM6, TDM7 70 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Hexagon cap screwdriver 906q/SW5x400-46185 Mat. No. 221 672/0 (supplied upon request) Cheese head screw M6-DIN 912 (Screw with hexagonal recessed hole) Mounting plate or back wall of control cabinet TDM/Montage Figure 48: Mounting TDM1, TDM2, TDM3, TDM4, TDM6, TDM7 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 71 325 355 8 150 heatsink Flat gasket ring 10 14 (185 with fan shell) 160 without fan shell 345 23 72 80 M8 373 ±0,2 390 KDS 1.1 F5 Figure 49: Dimension sheet for KDS1 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 max. total weight M1-KD Fan unit LE 4 Drive module Mechanical assembly kit Unit Table of weights X13 L+ L- A3 A2 A1 14,4kg 50A 15,2kg 100A 15,4kg 150A approx. 21,1kg approx. 21,3kg 1,7kg 4,2kg X14a X14b MA = Starting torque (Nm) for terminal bolt: A1, A2, A3 = M6; MA = 5 Nm L-, L+ = M5; MA = 3 Nm = 2xM5-Ms; MA = 2,5 Nm approx. 20kg approx. 20,3kg 14,1kg X25 X1 H2 H1 X24 X2 S1 30 A X26 MOD 3/4 X9 X8 SW5 5. Connections and Installation KDS/Maßblatt aus 109-0575-3001-03 safety guard 5. Connections and Installation View from inside the control cabinet 110±0,5 4 x ø5 110±0,5 110±0,5 11 15 96±0,5 = = 403±0,2 86+1 Space for additional KD-Moduls; dimensions as with unit 1 50+1 351+1 373±0,2 Space for KDS, KDV and KDA Space for an external fan is only needed in controllers with forced ventilation 115 9 133±0,2 18 6 x ø5 = = 92±0,2 92 KDS/Ausbruch Figure 50: Dimensions for spacing and arranging KDS1 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 73 min. 80 355 min. 200 Completely sealed housing or cabinet Fan motor Disassembly direction KD module mounting frame 325 min. 2 18 min. 80 Bleeder safety shell for KDV and air shaft for unit with forced ventilation Mounting frame fan External fan 160 at KDS/KDV without ext. fan heatsink Direction of air current 185 69 421 74 174 min. 400 X15 F6 KDV X15 F6 KDS F6 KDS 105 KDS Fan for controller with forced ventilation X15 KDS 110 min. 80 5. Connections and Installation KDS/Einbau Figure 51: Mounting diagram for KDS1 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 Hexagonal recess with SW5 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 Cheese head screw / 4x M4x18Z4-1 DIN912 (1) Fan for forced ventilation (1) To be used in units with W1 type of ventilation see Selection List Note the conductive connection (2) Contact disc M4/4x between the back wall of the control cabinet and the mounting frame! Cheese head screw / 4x M4x16 DIN912 (2) Cheese head screw / 2x M4x14Z4 DIN912 (1) Opening for additional KD module Screw thread M8 185 Fan mounting frame (1) Finger guard (1) KD module mounting frame (2) Parts labelled (2) are part of the accessories kit M1 Parts labelled (1) are part of the fan construction kit. Back wall of housing Housing and cabinet design Space for additional fan Screw thread M4 69 Air shaft (1) required for forced ventilation with fan 5. Connections and Installation KDS/Montage Figure 52: Mounting of KDS1 75 5. Connections and Installation 5.3. Connecting and wiring the servo drive module The servo drive module connection, the plug and terminal box assignments of the MAC motors and the line assignments of the cable connections are depicted in the figures of Chapter 5.6. The individual guidelines outlined in Chapters 5.3.1 through 5.3.8. should be followed. 5.3.1. Mains connection The mains connection and the control switch approppriate and recommended for it depend upon the supply module used and are, therefore, outlined in the corresponding supply module description. 5.3.2. Connection accessories as supplied Remove the following from the accessories as supplied: – link-circuit busbar for L+ and L- connections, – end plug X1, – the plug-in terminals on the drive module for the analogue interfaces and the motor feedback connection, as well as, – the flat belt bus cable for the low-tension bus plug X1 connections. The black lines of bus cable X1 should be at the bottom, once everything has been plugged in. The end plug for line monitoring, which is a part of the accessories kit for the supply module, should be plugged into the last modular unit (the unit located farthest away). 5.3.3. Power connections Line cross-sections should be selected in a size sufficient to avoid any line overloading in the event that maximum ambient temperature and the corresponding currents should occur. (Recommendations can be found in DIN VDE 0113, or EN 60204, Section 1.) The cross-sections of all lines at power connections must be twisted and have a sufficient size, namely: – Lines to additional bleeder module TBM must be twisted with a crosssection of at least 6mm2 (line length max. 2m). – Lines to the additional TCM capacities must be twisted with a crosssection of at least 10mm2 (see (1), 6 mm2 with TVM) (max. line length of 0.5m). – Adjacent drive modules are usually connected via the intermediate circuit busbar, a part of the connecting accessories. If this should not in some cases be possible, then the connection must be laid out in twisted lines which are as short as possible (max length 1m). A minimum crosssection of 10mm2 suffices in this case (see (1), 6 mm2 with the TVM). – Intermediate circuit throttles of the „GLD“ type should be connected to the supply module using twisted lines of 10mm2. These should be as short as possible. 76 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Note (1): The permissible minimum cross-section in the link-circuit at terminals L+, L- is determined by the size of the fuse on the side of the mains in supply modules with higher levels of power: Fuse current with mains voltage Cross-section of minimum connection 3 x 400 volts at L+, L- up to 50 amp. up to 63 amp. up to 80 amp. 10 mm2 16 mm2 25 mm2 The earthing of the individual modular units via the protective conductor starts at the supply module and proceeds radially on each unit. 5.3.4. Motor power cable The use of INDRAMAT motor cables is recommended for the lines between the servo drive module and the MAC servo motor. The power cable contains: • three lines for the motor power connection, • one line for the protective conductor connection, • a separately screened line pair for the motor thermostat contact, and, • a separately screened line pair for the motor brake. It can also be obtained as a ready-made cable with motor plug and ring cable sockets/vein end sleeves. If necessary, the cable can also be made using four twisted individual leads (3 phase, 1 protective conductor) with separately routed, screened, thermal contacts and brake connection lines. The minimum cross-sections are listed in the document entitled, „Electrical Connections of the AC Servo-Motor“. Maximum cable length equals 75m, if INDRAMAT cables are used. To increase the immunity to interference, the use of an adaptor board with a connecting terminal for the thermostat contact and brakes is recommended in models TDM1, TDM2, TDM3, TDM4 and KDS (see Figure 53) • AP 9 with servo modules TDM1, TDM2 and KDS1, • AP 9/1 with servo modules TDM3 and TDM4. This adaptor board must be removed and then remounted to the new controller in the event of an exchange. 5.3.5. Evaluation of the motor thermostat contact In the event that the motor temperature exceeds the critical value, which is equal to a motor housing temperature of approximately 105...110 degrees Celsius or 45 K over-temperature, then the thermostat contact opens in the motor windings. In this case, the drive must be shutdown and turned off within one minute after the contact opens. Within this minute, the NC can initiate a machine stop during the program cycle without damaging a workpiece. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 77 5. Connections and Installation It is possible for the thermostat contact in the coil end of the motor to open with increased short-term overloads even with low housing temperatures. Since interference voltages are inherent in thermostat contact lines (located in the motor power cable), this contact (contact load max. 220 volts, 1 amp.) should only be connected via potential-separated inputs for evaluation in an electronic controller. Generally, the cable screens should be earthed on the control cabinet side. The ground connection of the shield at the end of the cable should be as short and direct as possible. 65 30 ... 35 Adaptor card AP9 with holding angle Servo module guardplate Lengthening screw (with KD units only) 40 Motor connection 5 Motor break Motor thermostat contact Controller connection 5 3 Br + Br + TEMP TEMP 3 2 TEMP TEMP 2 4 1 4 1 AP9 Figure 53: Mounting and connecting adaptor card AP9 78 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation 5.3.6. Motor feedback cables The shielded motor feedback cable supplied by INDRAMAT contains nine lines. It is also available as a ready-made cable with motor terminal and vein end sleeves. Both the motor power cable and the feedback cable can have a maximum length of 75m, if original INDRAMAT cables are used. The feedback cable should be routed seperately and as far as possible from all load lines such as mains lines, motor power cables and contactor controller lines because of the possible source of interference they represent, especially with longer cable lengths (longer than 10m). A clearance of at least 100mm to the motor power cable is recommended. The feedback cable must be single-sidedly earthed to the servo drive module. The ground connection of the shield must be as short and direct as possible. The cable should not be routed close to high-frequency equipment, magnetic fields from transformers, throttles, motors and other magnetic consumers, as well as, high-voltage lines as otherwise interference could be coupled in. Maximum shielding can be achieved by routing the motor power cable and the motor feedback cable in separate, grounded metal pipes, Fig. 54, if high demands need to be made of the immunity to interference, in order – to avoid disruptive couplings between both of these cables, and, – to avoid disruptive reflections by the motor power cable onto adjacent electronic production facilities and mains. Signal processing cable (feedback and incremental encoder cable) Motor power cable Make sure that the tin plates are well connected at all locations to ensure conductivity! Kabelkanal Figure 54: Example of a separated and shielded routing of the motor power and feedback cables in metal pipes or canals! • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 79 5. Connections and Installation 5.3.7. Position Return Both the connection and maximum cable length of a position encoder attached to the motor are outlined in the corresponding manufacturer’s guidelnes. The length is dependent upon encoder type and controller input data. Both connection assignment and maximum cable length for the encoder supplied by INDRAMAT can be found in the appropriate description for position return. The connecting cables should be routed seperated from all load lines such as mains leads, motor power cables and contactor controller lines because of interference. Both the motor power and the encoder cables should be routed separately, particularly with longer cable lengths (greater than 10m) and using the greatest possible clearances. Maximum immunity to intereference can also be achieved here if motor power and encoder cables are routed in separate metal pipes, Fig. 54. The cable shields should generally be grounded on one side. The grounding connection of the shield at the end of the cable should be as short and direct as possible. The signal lines should not be routed near high-frequency equipment, magnetic fields from transformers, throttles, motors and other magnetic consumers as well as high-voltage cables as otherwise interference could be coupled in. 5.3.8. Signal lines The data for the input and output signals of the terminal strips for the user are outlined in Chapter 4. This includes: – speed set-point inputs E1, E2, E3, E4 – controller enabler RF, – external speed or current limit Ired, – current set-point MA, – tacho output Tsense, – external connecction of controller voltage +15Vm, -15VM, 24V. In an effort to reduce start-up times, all signal lines have been connected via plug-in terminals, which are part of the electrical connecting accessories. The cross-section equals at least 0.25 mm2, but no more than 1.5 mm2. The plug-in terminal connections belong to securely separated electric circuits and may only be, in order to guarantee protection against contact, connected to electric circuits from other units or equipment, if these circuits are also securely separated (low-voltage operation with secure separation, also called „PELV: Protective extra low voltage“). The messages coming from the terminal strip (terminals Bb1, Bb, TÜ, BVW, TVW, UD, NH, HSM) of the supply module and drive module can 80 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation be evaluated in a controller, in accordance with the data found in Chapter 7.2.2. (Figures 77-79). It is recommended that all signal lines be shielded. The cable shields are generally grounded on one side, namley, the servo module side. The grounding connection of the shield at the end of the cable should be as short and direct as possible. The corresponding signal lines should be routed separated from all load lines such as mains leads, motor power cables and contactor controller lines because of possible interference. The signal lines should not be routed near high-frequency equipment, magnetic fields from transformers, throttles, motors and other magnetic consumers as well as high-voltage cables as otherwise interference could be coupled in. 5.4. Earthing Connections The protective conductors and earthing connections of the individual modular units should be routed radially from the central earthing point of the supply module, as outlined in the connection plan. The earthing connection of the supply module should be connected to the mains grounding. The measures needed to protect the machinery must be taken into consideration. Earth circuits should be avoided, if possible, as interconnections can cause operating problems. 5.5. Measures to suppress interference In addition to the guidelines on line routing, outlined in Chapter 5.3 and 5.4, the following should be noted when operating the drives: 5.5.1. Sources of interference in the control cabinet If, in connection with electronic equipment and construction elements, such inductive loads as throttles, contactors and relays are switched by means of contacts or semi-conductors, then these must be suitably suppressed. Direct current actuation achieves this with the arrangement of the free-wheeling diodes, alternating current actuation achieves this with the arrangement of contactor type-related, commercial RC noise suppressors located directly at the inductance. Only the noise suppressor arranged directly at the inductance serves this purpose. Otherwise the noise level becomes too excessive and can interfere in the electronics as well as the operation of the drive. All other sources of interference, such as high-frequency equipment (components of eloxadizing equipment, amongst others) should be located and wired outside of the control cabinet. 5.5.2. Use of Radio Equipment If radios are used near the electronically controlled drive while the facility is running, then the following conditions must be maintained to exclude any interference from within: The control cabinets should always remain closed during normal operation to guarantee a sufficient high-frequency shielding of the internal wiring of the control cabinet and of the electronic equipment. The motor feedback cable should be routed as close as possible to grounded metal surfaces or in grounded metal cable shafts. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 81 5. Connections and Installation Working with radios during the commissioning process or testing close to an open control cabinet should be avoided while the drives are being operated. If radios are held during transmission close to the open control cabinet door and are pointing at an unfavorable angle in the direction of the control cabinet internal wiring, then uncontrolled motor movements are likely to occur once the drive is released and no higher-ranking monitor has been activated. 5.5.3. Radio Interference Suppression Suppression of radio interference is generally not needed within an industrial area or over larger industrial sites. If, however, machinery equipped with AC drives is operated in residential or smaller industrial areas and suppression of radio interference becomes necessary, then the limiting values of Class B in accordance with DIN VDE 0875, Sections 1, 3 and 11 or EN 55011, EN 55014, EN 50081, CISPR 11, CISPR 14 are adhered to directly at the machine by mounting a noise filter which INDRAMAT recommends into the mains cable. It is further recommended when longer cable lengths of the motor power cable are used and those motor power cables are not routed in a metal casing – that a shielded cable be used, or even better, – that these be routed in grounded metal pipes or in grounded cable shafts lined with metal. Figure 55, which follows, outlines all connections and terminal of the servo drive module. 5.6. Connection and wiring diagrams Plan overview: Figure Connecting plan Fig. 55 Fig. 56 Fig. 57 Fig. 58 Fig. 59 Fig. 60 Fig. 61 Fig. 62 Fig. 63 Fig. 64 Fig. 65 Fig. 66 Fig. 67 Overview of the connections of the servo drive module Connecting plan TDM 1 Connecting plan TDM 2 Connecting plan TDM 3 Connecting plan TDM 4 Connecting plan TDM 6 Connecting plan TDM 7 Connecting plan KDS 1 Bus connection X1: Plug assignment between the modular units Plug connection IN 108 of the motor power cable at motor MAC Plug connection IN 172 of the motor power cable at motor MAC Plug connection IN 252 of the motor power cable at motor MAC Terminal box connection of the motor power cable at motor MAC 132 and MAC 160 Plug connection of the feedback cable between the feedback unit of the MAC motor and terminal strip of servo drive modules TD1, TDM2, TDM3, TDM6 or KDS1. Plug connection of the feedback cable between the feedback unit of the MAC motor and the terminal strip of servo drive modules TDM3, TDM6. Plug connection of the feedback cable between the feedback unit of the MAC motor and the terminal strip of servo drive modules TDM 4, TDM7. Fig. 68 Fig. 69 Fig. 70 82 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Connection, Terminal Function Maximum lined-up voltage L+, L- Power connection to adjacent equipment using link-circuit busbar. Tighten nut M5 of the fixing bolt with max. 3Nm! 250...450 Volt A1 A2 A3 Three-phase connection of the motor power cable. Tighten nut M6 of the fixing bolt with max. 5 Nm! 250...450 Volt X1 The bus connection distributes lowlevel voltages and the acknowledgement message line of the end plug to the individual drive amplifiers. ±15V, 24 Volt TDM 1: X5 TDM 2: X5 TDM 3, TDM 6: X42, X43 TDM 4, TDM 7: X49, X50 KDS 1: X25, X26 Terminal strip for user inputs and outputs (description Chapter 4). TDM 1: X6 TDM 2: X6 TDM 3, TDM 6: X41 TDM 4, TDM 7: X48 KDS 1: X24 Feedback connection ±15 Volt for MAC motor This connection supplies the motor feedback electronics and signals rotor position (BlC 1, BLC 2, BLC 3) and the tacho signal to the servo drive module for the purpose of evaluation in the controller. ±15 V, 24 Volt Figure 55: Servo drive module connections and voltages between the terminals and the housing. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 83 84 M E 0VL 3 C D motor feedback 12 11 10 9 8 7 4 3 2 5 +24VL Figure 56: TDM 1 connection plan TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 MAC-Servomotor M B 3 2 1 8 7 6 5 10 9 0VM 4 ϑ> blocking thermostat contact brake A A1 A2 A3 motor power connection -15VM 0VM +15VM BLC 3 BLC 2 BLC 1 Tacho G H X8 X5 X6 X14 X1 AC 220V 12 1 L+ L- X8 Unit fan AC 220V (3-pole special cable) Signal processing (12-pole bus cable) Power DC 300 volt (busbars) accessories connecting electrical via drive modules additional Supply for (1) Unit fan guidelines: Controllers with a serial number starting from SN 234... contain a unit fan, shielded and internally connected to 24 volts, without fuse F5. External connection X13 via the special three-pole cable is necessary in that case where adjacent equipment or equipment to-be added later contain an AC220 or AC115 volt fan. Controllers with AC220 volts or AC114 volts are obsolete. Programming modules MOD 1 / MOD 2 motor fan M F internal fan unit (1) F5 rotor position detector rotor position detector rotor position detector tacho voltage available reference potential shield AC 220V X13 X1 supply voltage AC 220V 3 pole special cable (1) black +15VM 0VM -15VM Ired MA Tsense Servoantriebsmodul TDM 1 E1 E2 E3 E4 Bb Bb RF 0VM cable controller enabler reference potential shield controller voltage for external use ext. peak current limit current set-point tacho signal for external use bus connecting 1 UD 2 BB 3 +15VM 4,5,6,7 0VM 8,9 -15VM 10 0VL 11 +24VL 12 ready-to-operate 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 L+ summing input summing input L- X8 difference input busbars supply module Feedin of drive components via electrical connecting accessories 5. Connections and Installation Anschlpl/TDM1 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 AC 220V M E X8 0VL 3 C D motor feedback 12 11 10 9 8 7 4 3 2 5 ϑ> +24VL MAC-Servomotor M B 3 2 1 8 7 6 5 10 9 0VM 4 blocking thermostat contact brake A A1 A2 A3 motor power connection -15VM 0VM +15VM BLC 3 BLC 2 BLC 1 Tacho G H F5 X6 X14 X1 AC 220V 12 1 L+ L- X8 unit fan AC 220 volts (3-pole special cable) signal processing (12-pole bus cable) power DC 300 volts (busbars) accessories connecting via electrical modules drive additional for Supply (1) Unit fan guidelines: Controllers with a serial number startingfrom SN 234... contain a fan, internally connected to 24 volts and shielded, without fuse F5. The external connection X13 via the special three-pole cable is necessary in that case where adjacent equipment or equipment to-be added later contain an AC220 or AC115 volt fan. Controllers with AC220 volts or AC114 volts are obsolete. Programming modules MOD 5 / MOD 6 motor fan M F internal unit fan (1) Rotor position detector Rotor position detector Rotor position detector Tacho voltage available reference potential shield AC 220V X13 X1 Supply voltage 3-pole special cable (1) black X5 Servoantriebsmodul TDM 2 +15VM 0VM -15VM Ired MA Tsense cable controller enable reference potential shield controller voltage for external use ext. peak current limit current set-point tacho signal for external use E1 E2 E3 E4 Bb Bb RF 0VM bus connecting 1 UD 2 BB 3 +15VM 4,5,6,7 0VM 8,9 -15VM 10 0VL 11 +24VL 12 ready-to-operate 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 L+ summing input summing input L- X8 difference input busbars supply module feedin of drive components via electrical connecting accessories 5. Connections and Installation Anschlpl/TDM2 Figure 57: Connecting diagram for TDM2 85 The supply of additional drive modules with AC 220 volts. X73 AC 220 volts from supply module or drive module X14 X74 F7 M motor feedback D M C 3 B motor fan AC 220V M blocking thermostat contact brake A G H +24VL F E 0VL ϑ> Anschlpl/TDM3 Figure 58: Connection plan for TDM3 86 MAC-Servomotor ext. fan unit (1) (1) Connection for AC115/220 volt optional fan unit (obsolete): X43/4 X43/5 -15VM 0VM +15VM BLC 3 BLC 2 BLC 1 Tacho 0VM X1 black cable bus connecting L+ L- M X41 E3 E4 0VM +15VM Ired FB MA Iist 0VM Tsense busbars X8 supply module Feedin for drive components via electrical connecting accessories rotor position detector rotor position detector rotor position detector tachometer voltage reference potential shield 1 UD 2 BB 3 +15VM 4,5,6,7 0VM 8,9 -15VM 10 0VL 11 +24VL 12 shield summing input summing input reference potential controller voltage ext. peak current limit available voltage set-point actual current value reference potential tacho signal for external use E1 E2 supply voltage 3 12 11 10 9 8 7 4 2 5 6 3 2 1 8 7 6 5 9 4 A1 A2 A3 1 2 3 4 5 6 7 8 9 10 11 12 13 difference input +24VL 0VL 12 X1 X42 X43 temperature monitoring +15VM 0VM -15VM TÜ X8 controller voltage for external use Bb Bb RF +24VL 0VL motor power connection 1 2 3 4 5 6 7 8 9 10 Servoantriebsmodul TDM 3 1 Programming modules MOD 13 / MOD 14 ready-to-operate controller enabler ext. 24V-fan unit accessories connecting via electrical drive modules signal processing (12-pole bus cable) additional for L+ L- X8 power DC 300 volts (busbars) Supply 5. Connections and Installation TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • DOK-ANAX**-TDM+KDS+MAC-AW02-EN-P 0VL +24VL ϑ> blocking thermostat contact brake A 3 M B D motor feedback MAC-Servomotor C 2 10 9 8 7 6 5 4 11 12 3 1 motor fan M E 10 9 8 7 6 4 3 2 1 5 G H 0VM +15VM HS 3 HS 2 commutationsignal HS 1 T3 T2 tacho voltage T1 T0 shield A1 A2 A3 X48 12 1 X1 L+ L- X8 AC 220 volts from supply or drive module X14 X74 F7 accessories connecting via electrical modules drive additional Supply for M M X73 ext. unit fan (1) +24VL 0VL The supply of additional drive modules with AC 220 volts ext. 24V-unit fan signal processing (12-pole bus cable) power DC 300 volts (busbars) X49/4 X49/5 (1) Connection for AC115/220 volt optional unit fan (obsolete): Programming modules MOD 17 / MOD 18 F X8 motor power connection E3 E4 0VM +15VM Ired FB MA Iist 0VM Tsense Servo-drive module TDM 4 E1 E2 supply voltage AC 220V X1 shield summing input summing input reference potential controller voltage ext. peak current limit available current set-point Actual current value reference potential tachosignal for external use 1 2 3 4 5 6 7 8 9 10 11 12 13 black difference input Bb Bb RF +24VL 0VL +15VM 0VM -15VM TÜ cable temperature monitoring bus connecting 1 UD 2 BB 3 +15VM 4,5,6,7 0VM 8,9 -15VM 10 0VL 11 +24VL 12 X49 controllervoltage for external use 1 2 3 4 5 6 7 8 9 L+ X50 controller enabler L- X8 ready-to-operate busbars supply module feedin of drive components via electrical connecting accessories 5. Connections and Installation Anschlpl/TDM4 Figure 59: Connection plan for TDM4 87 The AC 220 volt supply for additional drive modules BROBRIBRO+ TMO TMO X1 X73 X74 F7 AC 220 volts from supply or drive module X14 M ext. unit fan (1) motor fan 3 evaluation of motor thermostat contact +24VL starting interlock controller 0VL starting interlock acknowledgement black cable bus connecting power DC 300 volts Anschlpl/TDM6 signal processing Figure 60: Connection plan for TDM6 88 MAC-Servomotor M motor feedback M C B A 0VL motor blocking +24VL brake controller X3 frei AS1 AS2 ASQ ASQ 11 15 10 9 8 7 6 5 4 3 2 1 ϑ> blocking thermostat contact brake 13 TMI 12 BRO+ L+ Lbusbars X8 supply module feedin of drive components via electrical connecting accessories D TMI 14 E E3 E4 0VM +15VM I red FB MA I ist 0VM T sense 1 UD 2 BB 3 +15VM 4,5,6,7 0VM 8,9 -15VM 10 0VL 11 +24VL 12 shield summing input summing input reference potential controller voltage ext. peak current limit available current set-point Actual current value reference potential tacho signal for external use E1 E2 -15VM 0VM +15VM BLC 3 BLC 2 BLC 1 Tacho 0VM F H 1 2 3 4 5 6 7 8 9 10 11 12 13 difference input Servoantriebsmodul TDM 6 X42 Programming module MOD 19 / MOD 20 (1) Connection for optional AC115/220 volt unit fan (obsolete): AC 220V X41 rotor position detector rotor position detector rotor position detector tacho voltage reference potential shield X43 temperature monitoring supply voltage G use 3 12 11 10 9 8 7 4 2 5 6 3 2 1 8 7 6 5 9 4 X8 for external A1 A2 A3 controller voltage motor power connection controller enabler +24VL 0VL X43/4 X43/5 X1 12 1 1 Bb 2 Bb 3 RF 4 +24VL 5 0VL 6 7 +15VM 8 0VM 9 -15VM 10 TÜ ready-to-operate M ext. 24V-unit fan accessories signal processing connecting via electrical drive modules additional L+ L- X8 power DC 300 volts for Supply 5. Connections and Installation TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 X73 AC 220 volts from supply or drive module X14 M motor fan X74 F7 MAC-Servomotor motor feedback D 3 M C B 11 15 10 BRI9 BRI+ 8 TMO 7 TMO 6 5 frei 4 AS1 3 AS2 2 ASQ 1 ASQ ϑ> BRO- 0VL +24VL blocking thermostat contact brake A 13 TMI 12 BRO+ X1 L+ motor blocking brake controller evaluation of motor thermostat contact +24VL 0VL starting interlock controller starting interlock acknowledgement black cable bus connecting X3 Lbusbars X8 14 E TMI F H E3 E4 0VM +15VM I red FB MA I ist 0VM T sense 1 UD 2 BB 3 +15VM 4,5,6,7 0VM 8,9 -15VM 10 0VL 11 +24VL 12 shield summing input summing input reference potential controller voltage ext. peak current limit free current set-point Actual current value reference potential tacho signal for external use E1 E2 2 10 9 8 7 6 5 4 11 12 3 1 G 1 2 3 4 5 6 7 8 9 10 11 12 13 difference input supply module M AC 220V X48 X50 Servoantriebsmodul TDM 7 X49 temperature monitoring 10 9 8 7 6 4 3 2 1 5 X8 controller voltage for external use 0VM +15VM rotor position detector HS 3 rotor position detector HS 2 rotor position detector HS 1 T3 T2 tacho signal T1 T0 shield supply voltage A1 A2 A3 controller enable Bb Bb RF +24VL 0VL +15VM 0VM -15VM TÜ motor power connection 1 2 3 4 5 6 7 8 9 ready-to-operate feedin of drive componentsvia electrical connecting accessories ext. unit fan (1) AC 220 volt supply for additional drive modules X1 12 1 Programming module MOD 21 / MOD 22 (1) Connection for the optional AC115/220 volt unit fan (obsolete): X49/4 X49/5 +24VL 0VL M ext. 24V-unit fan accessories Signal processing (12-pole bus cable) connecting via electrical drive modules additional L+ L- X8 power DC 300 volts (busbars) for Supply 5. Connections and Installation Anschlpl/TDM7 Figure 61: Connection plan for TDM7 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 89 F6 X14 X14 AC 220V 16 1 Programming module MOD 3 / MOD 4 X24 blocking thermostat brake contact G H M motor fan E internal unit fan F +24VL AC 220V 3-pole special cable X13 X1 black cable bus connecting AC 220V M F5 UD BB +15VM 0VM -15VM +24VL 0VL frei 1 2 3,4 5,6,7,8 9,10 11,12 13,14 15 16 L+ Lbusbars X8 supply module feedin of drive components via electrical connecting accessories 0VL ϑ> Anschlpl/KDS Figure 62: Connection plan for KDS1 90 MAC-Servomotor motor feedback M 3 0VM T sense D MA C I red B E3 E4 0VM X8 shield summing input summing input reference potential shield ext. peak current limit shield current set-point shield reference potential tacho signal for external use E1 E2 rotor position detector rotor position detector rotor position detector tacho voltage available reference potential shield A 1 2 3 4 5 6 7 8 9 10 11 12 13 difference input supply voltage 12 11 10 9 8 7 4 3 2 5 3 2 1 8 7 6 5 10 9 0VM 4 -15VM 0VM +15VM BLC 3 BLC 2 BLC 1 Tacho A1 A2 A3 X26 X25 heatsink temperature monitoring +15VM 0VM -15VM TUE TUE motor power connection controller voltage for external use Bb Bb RF +24VL 0VL Servoantriebsmodul KDS 1 1 2 3 4 5 6 7 8 9 10 11 ready-to-operate controller enabler Ext. heatsink M unit fan AC 220 volts (3-pole special cable) accessories connecting via electrical modules drive signal processing (16-pole bus cable) L+ power DC 300 volts (busbars) L- X8 additional Supply for 5. Connections and Installation TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Plug X1 Bus connection Plug X1 Bus connection 1 UD 1 UD 2 BB 2 BB 3 +15V 3 +15V 4 0VM 4 +15V 5 0VM 5 0VM 6 0VM 6 0VM 7 0VM 7 0VM 8 -15V 8 0VM 9 -15V 9 -15V 10 0VL 10 -15V 11 +24V 11 +24V 12 +24V 13 0VL 14 0VL 15 frei 12 Plug assignment X1 for 12 poles Bus connections for TDM, TWM, TVM 16 Plug assignment X1 for 16 poles Bus connections for KDV, KDS, KDA, KDW, KDF Servo drive modules TDM, TVM Servo drive modules KDS, KDV Bus connection Plug X1 1 2 3 4 5 6 7 8 9 10 11 Plug X1 UD UD BB BB +15V +15V 0VM +15V 0VM 0VM 0VM 0VM 0VM 0VM -15V 0VM -15V -15V 0VL -15V +24V +24V +24V 12 0VL 0VL frei 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 BusX1 Figure 63: Bus connection X1: Plug assignment between the modular units • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 91 5. Connections and Installation Power plug IN 108 ϑ> H 6 E 5 F 7 220V~/max. 1A + Motor thermostat contact G +24V A F B H G - U M 3 PE 8 Motor blocking brake 0VL A 1 A1 B 2 A2 C 3 A3 D ge/gn E C D Power plug IN 108 (view onto the soldered side of the plug) Connecting cross-section: max. 6 mm2 Power connection at the drive module Figure 64: Plug connection IN108 of the MAC motor power cable Power plug IN 172 J available ϑ> H 6 E 5 F 7 220V~/max. 1A Motor thermostat contact E + - U M 3 PE G 8 A B +24V Motor blocking brake 0VL A 1 A1 B 2 A2 C 3 A3 D ge/gn J F H D C G Power plug IN 172 (view onto the soldered side of the plug) Connecting cross-section: A,B,C,D max. 25 mm2 E,F,G,H,J max. 1,5 mm2 Power connection at the drive module Figure 65: Plug connection IN172 of the MAC motor power cable 92 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Power plug IN 252 ϑ> H 6 E 5 F 7 220V~/max. 1A + G - U M 3 PE 8 Motor thermostat contact B +24V D A H Motor blocking brake 0VL A 1 A1 B 2 A2 C 3 A3 D ge/gn C G E F Power plug IN 252 (view on the soldered side of the plug) Connecting cross-section: max. 0,75 mm2 Power connection at the drive module Figure 66: Plug connection IN 252 of the MAC motor power cable ϑ> T2 6 T1 5 + B+ 7 +24V - B- 8 0VL U1 1 A1 V1 2 A2 W1 3 A3 220V~/max. 1A U M 3 PE Motor thermostat contact Motor blocking brake Power connection at the drive module ge/gn Figure 67: Terminal box connection of the motor power cable on the MAC 132 and MAC 160 motors. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 93 5. Connections and Installation Connector receptacle on motor IN 104 (St. A) feedback plug IN 302 coding pin 0VM ppolarity tacho avail. avail. BLC 1 BLC 2 BLC 3 +15VM 0VM -15VM 1 2 3 4 5 6 7 8 9 10 11 12 gray black brown plug-in terminal 1) Terminal strip X24 (KDS) Terminal strip X6 (TDM1;2) 9 10 5 2) 2) 0VM tacho 6 7 8 1 2 3 4 yellow green pink red white blue BLC 1 BLC 2 BLC 3 +15VM 0VM -15VM feedback cable IN 208 9 poles Ø 0,5 mm2 9 8 1 Feedback plug IN 302 (view towards soldered side of plug) connecting cross-section: max. 1mm 2 2 10 12 7 3 11 6 4 5 1) Plug-in terminal with 10 poles (INDRAMAT mat. no.: 219 464); part of the components of the electrical connecting accessories for TDM 1 and TDM 2 generally supplied. 2) Possible reversible rotation; if required, bridge PIN 9 and PIN 10 of the plug-in terminal! FeedTDM1/2KDS Figure 68: Plug connection of the feedback cable between the return unit of the MAC motor and the terminal strip of servo drive modules TDM1, TDM2 or KDS1. Connector receptacle on motor IN 104 (St. A) feedback plug IN 302 coding pin 0VM 1 2 polarity tacho 3 4 gray black brown avail. avail. BLC 1 BLC 2 BLC 3 5 6 7 8 9 yellow green pink +15VM 0VM -15VM 10 red 11 white 12 blue plug-in terminal 1) Terminal strip X41 9 0VM 5 tacho 6 7 8 BLC 1 BLC 2 BLC 3 1 2 3 4 +15VM 0VM -15VM 2) feedback cable IN 208 9 poles Ø 0,5 mm 2 1 9 8 2 10 12 7 3 11 6 4 5 Feedback plug IN 302 (view towards soldered side of plug) connecting cross-section: max. 1mm 2 1) Plug-in terminal with 9 poles (INDRAMAT mat. no.: 220 176); part of the components of the electrical connecting accessories for TDM 3 generally supplied. 2) Possible reversible rotation; if required, bridge PIN 9 of the plug-in terminal! FeedTDM3 Figure 69: Plug connection of the feedback cables between return unit of the MAC motor and terminal strip of servo drive modules TDM3 and TDM6. 94 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 5. Connections and Installation Connection: Motor feedback MAC 21, 25 and 41 to servo drive module TDM 4 Connector receptacle on motor IN 104 (St. A) feedback plug IN 302 plug-in terminal 1) Terminal strip X48 (TDM 4) coding pin 1 0VM 2 3 grey tacho 1 4 brown 2 T1 tacho 2 tacho 3 5 6 blue T2 T3 HS 1 7 black yellow 3 4 6 HS 1 HS 2 8 green 7 HS 2 HS 3 +15VM 9 pink 10 red 11 white 8 9 HS 3 +15VM 1 0VM tacho 0 10 12 0VM -15VM 5 feedback cable IN 208 9 poles Ø 0,5 mm 2 1 9 8 2 10 12 7 3 11 6 4 5 Feedback plug IN 302 (view towards soldered side of plug) connecting cross-section: max. 1mm 2 1) Plug-in terminal with 10 poles (INDRAMAT mat. no.: 219 464); part of the components of the electrical connecting accessories for TDM 4 generally supplied. FeedTDM4 Figure 70: Plug connection of the feedback cable between return unit of the MAC motor and the terminal strip of servo drive modules TDM4 and TDM7. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 95 6. Commissioning 6. Commissioning Note: The commissiong steps required for the INDRAMAT drives only are described here. The machine manufacturer must submit the commissioning process for the entire machine or facility as required for the individual application. 6.1. Protection of Personnel and Machinery 6.1.1. Safety of Personnel Protection against contact with hot parts. Sources of Danger: • high mains voltage at terminals L1, L2, L3 • high link circuit voltage at L+, L• high motor voltage at terminals A1, A2, A3 and motor cable plug-in terminals. Before working on electrical equipment and units: • Using the master switch, switch power to the machine off and secure it against being switched back on! In case of doubt, remove fuses. • Wait through the discharge time of the intermediate circuits after shutting down! The discharge time can, depending upon the condensers, take several minutes. • Wait for the motors to stand still because of the motor voltage! Check the voltage between int. circuit busbars L+ and L- after shut down to see if the value is below 50 volts. If in doubt, short-circuit. – Before turning units on: • Securely cover all hot parts to avoid any accidental contact! Cover the power connections with plastic lids! • Close the control cabinet, if possible. Authorized electrical personnel must secure open electrical control cabinets, accessible electrical facilities and equipment, which could be hot, against contact by personnel at risk. • Check the fixed connection of the protective conductor of all the electrical equipment and motors, in accordance with the connection plans! Operation is only permitted with firmly attached protective conductors in their proper positions on equipment and motor plug, even for quick measuring or testing purposes. 96 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning – Protection against indirect contact with the mains: Secure against contact by taking the necessary protective measures which are prescribed for the mains situation at hand. An F1 protective feature (fault current protective feature) cannot be used for the AC drives! Protection against contact must be secured in some other way, e.g., an over-current protective feature (in accordance with DIN VDE 0160, Section 6.5.2.4). Protection against dangerous movements Danger from unwanted movement exists because of faults • in the wiring and cables • in the NC or NC program • in the measuring value encoders such as the incremental encoder, • in the operation of the machine, e.g., switching-off safety functions and monitors to check operation and setting. These faults can occur • right after commissioning, but also, • after an indeterminate length of time during normal operation. The following safety guidelines should therefore be observed: – While operating the drives: • Personnel should not remain within the vicinity of machine activitiy! Measures that could be taken: protective fences, bars, covers, light barriers and similar. It is absolutely necessary that fences and covers are sufficiently solid to resist any motional energy which might occur! • The emergency off switch must be accessible. • All movement must be carefully observed for possible danger during the commissioning procedure! Measures must be taken promptly, even against problems which only occur very rarely! – Remaining within the vicinity of drive motion for performing such tasks as removal or replacement of tools or workpieces. • Make sure the drives are standing still before working or entering the danger zone! • Secure against unwanted operation by disconnecting the drives from the mains via the emergency-off switch (switching the power contactor or the master switch off)! • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 97 6. Commissioning – Remaining within the vicinity of drive movement for • the purpose of maintenance or service, • cleaning, and, • prior to long breaks in operation. Switch all power to the machine off and secure it against being switched back on with the use of the master switch! – Care should be taken when operating high-frequency equipment or radios! Avoid operating such equipment in close proximity to the drive modules when control cabinets are open and while the drives are running. If high-frequency equipment with high transmission power is operated at an unfavorable angle in close proximity to the drive amplifier through the open control cabinet in the direction of the wiring inside the control cabinet, then, in all likelihood, under unfavorable conditions, an uncontrolled movement of the motor is possible unless a higher-ranking monitor has been activated! Safety during handling and assembly. – Use proper assembly and transport devices! Prevent bruises and contusions! – Use only the appropriate tools! Use prescribed special tools! – Do not remain standing under hanging loads! – Any liquids on the floor should be wiped up immediately to prevent slipping! 6.1.2. Protection of Equipment and Machinery INDRAMAT’s electronic drive components have been equipped with extensive safety features and technically secured against overloads to the greatest extent possible. The following guidelines should be noted to prevent improper handling: Avoid faulty connections: Check before switching on: – Only connect voltages at the controller inputs that correspond to those listed in the datasheets and connection plans! – Do not connect outputs to an external voltage! – Check to ascertain that the 24V and the +15V output terminals have not mistakenly been connected! 98 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning – Check whether the low voltages, 5, +15, -15 and 24 volts, have been securely separated from the mains potential, have not been externally connected with or come into contact with the • power cables, • link circuit cables (L+, L-), or, • connections to the motor power cables! They must be sufficiently insulated against each other! Protection against external or high voltages. – When checking the control cabinet wiring with outside voltages, make sure that no invalid voltages can reach the terminals of the electronic components! Just to be sure, clamp the connections off before checking! – High-voltage checks: INDRAMAT’s electronic drive components have been voltage-checked in detailled tests in accordance with VDE 0160. When checking the high-voltage of the electrical devices of industrial machinery and the control cabinet wiring, remove or clamp off all the electronic connections to avoid damaging the electronic components (applicable acc. to VDE 0113, EN 60204)! The following INDRAMAT products are a part of the electronic equipment: TVM, TVD, TDM, TWM, TFM, TBM, TCM, KDV, TVR, KDR, KVR, KDS, KDW, KDA, KDF, RAC, DSC3 as well as the feedback and encoder electronics of the MAC motors and 2AD. Protection against electrostatic loads. Electrostatic loads endanger electronic components. Those bodies that can come into contact with connecting terminals, components and adaptor boards, must be discharged by grounding them. – Before touching, discharge your own body by touching a conductive, grounded object (e.g., plain grounded metal). – When soldering, ground the soldering iron! – Place the parts and tools being used on a conductive, grounded surface. Endangered parts, such as adaptor boards or programming modules, should only be stored and transported in conductive packaging. Protecting the equipment against environmental influences Adhere to the applicable information in the data sheets! Humidity – Built-in units should not be directly subjected to humidity! Especially for electronic equipment note: – Maintain the internal temperature of the control cabinet with at least 2 degrees C. above the outside temperature to avoid the formation of dew! • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 99 6. Commissioning The following must especially be noted in the case where refrigerfators are to be used in the control cabinets! – Before commissioning, wait until any collected dew has dissipated, if, • the equipment was brought out of the cold into the warm operating area! • the location of operation has been moved! • if warm air is being blown into cold equipment! – Permissible relative humidity at the built-in units drops with increasing ambient temperature! At 40 degrees Celsius, the permissible relative humidity at the equipment for 30 days over a one-year period equals a maximum of only approximately 72%, at 20 ... 35 degrees C. approximately 95% (see DIN 40040 or DIN VDE 0160 E, December 1990). Condensation water should only be permitted to occur occasionally when the unit is not being operated (DIN VDE 0160 E, December 90). Impure air – Do not permit ambient air with suspended substances to get directly to the electronic equipment! – Make sure that the ambient air has been sufficiently cleaned before letting it get to the equipment: • guide the entering air through sufficiently long air ducts! • use sufficiently good air filters! • mount such purification devices as ion-exchangers! • provide sufficient encasements by using gaskets! – Do not leave the control cabinets open for longer periods in the presence of unclean air, if electronic equipment has been built-in! Conductive and water-soluble contaminants and particles in the air are especially critical. With a humidity of 55%, these can already cause superficial currents on leakage paths and corrosion of the electronic parts and adaptor board. After longer periods of operation, it is possible that the machinery • can be disrupted short-term, or, • can completely fail as a result of sneak currents, breakdowns due to surface conduction or corroded power connections. Temperature – Maintain the ambient temperature recommended! The following applies unless otherwise specified: 100 • storage temperature: -25...+55 °C, • transport temperature: -25...+70 °C • ambient operating temperature: 0...+45 °C. TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning – Do not, if possible, subject encased electronics to severe outside temperature changes when storing and operating! (This also applies to integrated motor feedback.) Oscillation and Shock Stresses – Do not subject electronic equipment, motors or drives to excessive oscillations and shock loads! – Assemble mechanical parts in accordance with assembly guidelines. Do not use force! Use only the proper tools! Protecting the machine The machine is in danger when monitors are switched off during commissioning to test functions and make adjustments. If, for example, the position-control loop of the NC controller is severed and the drive is run in the speed control loop, then, because of the limited paths of the linear axes, the machine is in danger when run – over the limit stop, or, – over parts that temporarily project into its working path. Damage to the machines can be avoided by: – permitting only properly trained personnel to enable the drives and modulate a speed set-point! – always checking the safety clearances on the working path! – securing emergency-off options via the limit switch and emergency-off switch! 6.2. Tools and equipment required for commissioning The following tools are needed for commissioning: – multitesters for d.c. and alternating voltages (moving coil instrument) – set-point encoder with battery: R2 10k Vset V 10k S1 R1 - G 10....15 V + P < V = nset set S2 RF G: Battery for voltage supply P: Built-in d.c. voltmeter for Vsoll display R1: 10-speed potentiometer for adjustable Vsoll R1: Safety resistor S1: Three-pole throw-over switch S2: Throw-over switch for control enabler (RF) Battbox Figure 71: Set-point encoder box with battery. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 101 6. Commissioning 6.3. Checks with the equipment switched off As soon as all of the equipment has been connected, then all the following points are to be checked without applied power first. 6.3.1. Mains connections conditions 1. The mains connections specified in the descriptions of the supply modules used – TVM, KDV and TVD – should be checked – at the voltage control connection, and, – at the power connection. The phase coincidence of the mains auxilliary voltage requirements L1-L3 must be rechecked with the power requirements L1-L2-L3 in KDV2 and KDV3. 2. The terminal voltages of a transformer connected in series must be checked. Input and output should not be inverted. The center ground of an auto-transformer should not be connected. Mains without mains-related ground wires must, in any event, use isolating transformers of circuit class YynO. The center ground of the output side must be linked to the central zero point of the supply module and grounded there. 3. The fuses specified for the supply source used (listed in the supply module description) must be checked for correctness. 6.3.2. Installed drive components The following must be checked for every drive installed: The data on the rating plate of the programming module on the lines „Contr“ and „Motor“ must be checked to assure that they agree with the data on the rating plates of – the servo drive module („Contr.“), and, – the MAC servo motor („Motor“), (see figures in Chapter 3.1). Should the type designations not agree, then the correct MOD programming module must first be plugged into the servo-drive module; or, the correct motors and controllers need to be mounted. Otherwise, there is danger of damage. 6.3.3. Instructions for replacing programming module MOD – Neither the supply nor the servo drive modules should have power! – All voltage supplying the supply module should, therefore, be shut off. – Check to see whether all light-emitting diodes are off. – Secure power against being turned back on while the programming module is being changed. 102 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning – Release the knurling screw and remove the programming module. – Using the programming module rating plate, check to see whether the data on the new MOD programming module agree with the type of servo drive module installed and the typer of motor connected. Type designation for motor and servo drive module on the programming module must agree with that installed, otherwise, there is the danger of damage. – Plug the new programming module into the slot of the old one and tighten the knurling screw of the programming module. – All power may now be turned back on. Using potentiometers P1, P2 and P3, it may be necessary to compensate the input information for programming modules MOD2, MOD 4, MOD6, MOD14, MOD18, MOD20 and MOD22. 6.3.4. Wiring and line cross-sections 1. Wire in accordance with connection plan: Every line should be checked for short-circuits, interference, inversions, conductor cross-sections and proper connection, in accordance with INDRAMAT’s connection plans. Conductor cross-sections must be selected in a size sufficient to avoid conductor overload (see Guidelines DIN VDE 0113) in the presence of maximum ambient temperature and corresponding currents. 2. Twist power wiring: All lines on power connections must be twisted and have a sufficient cross-section: – All lines to additional bleeder TBM must be twisted and have a crosssection of at least 6mm2, and of at least 10mm2 twisted to additional capacities TCM. – Adjacent drive modules are normally connected via the link circuit busbars. If this should not be possible in some cases, then the connection should use a twisted line which is as short as possible and has a cross-section of 10mm2 (max. length approx. 1m). – Link circuit throttles of the „GLD“ type should also be connected using twisted 10mm2 lines which are as short as possible. – The lines between the servo drive module and the MAC servo motor must either be a four-vein motor cable (3X phase, 1X ground), e.g., an INDRAMAT motor cable, or a twisted single line. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 103 6. Commissioning 3. Grounding Grounding must be carried out as described in Chapter 5.4. – The protective conductor and grounding connections for the individual modular units must be radially routed from the center ground of supply module TVM, TVD, KDV or KVR, as indicated in the connection plan. – The center ground of the supply unit must be connected to the ground conductor. The applicable protective measures for machine or plant must be taken into consideration. Ground loops should be avoided, if at all possible, as interconnections could disrupt operations. 4. Bus connections X1: The supplied flat belt bus cable, to be used for connecting the lowvoltage bus plug X1, must be firmly plugged into every controller. The black lines of this cable must be arranged at the bottom. The end plug for conductor monitoring, a part of the supply module accessories kit, must be plugged into the last modular unit (the one farthest away). 5. Shielding: Check to see whether the guidelines listed in Chapter 5.5 have been adhered to or not. Particular attention must be given to mounting the shield of the set-point line and the motor feedback cable on the side of the servo drive motor. The shield for the position encoder cable should generally be clamped to the NC. In the event that shielded motor power cables are used, it is more practical to ground the shield on the motor plug, there where it enters the control cabinet on the control cabinet wall and on the servo drive module. 6. Ventilation requirements: Check whether all lines and cables supplying the controller and motor fans have been properly connected. 6.3.5. Terminals and connecting points Check all electrical connections for safe contact and firm fit on the terminals. It is important that all ground and shield connections have a reliable contact with a surface area which is as large as possible, as there will be inter-ference otherwise. Connections which have not been firmly clamped or screwed in, can occasionally disrupt operation and lead to the development of heat. 104 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 105 6. Commissioning 6.4. Power-up sequence (summary) 1 Control voltage (auxilliary voltage) ON signal electronics supplied **24V/±15V** lit, one or two lamps **BLC** lit, **Tacho** lit, **Bb** flashing (1) ready-to-operate contact Bb1 of the supply module closes? (Ready to accept power) No YES plug in end plug flashing **RF** ? (1) YES controller enable signal at terminal RD switched off or turned to zero No drives are interference free no fault in mains continued on next page Symbol legend: **....** = diagnostics display lamp (1) = not with KDS 1 and older controllers of types TDM 1, TDM 2 with serial numbers below SN 233..., TDM 3 with serial numbers below SN 240060-... TDM 4 with serial numbers below SN 240062-... aFlußdiagramm Figure 72: Power-Up Sequence 106 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning 2 Power ON Mains contactor closed Power on Supply module TVM1, TVM 2, KDV 1, Supply module KDV 2, KDV 3, KDV 4, TVD 1, KVR 1 Intermediate circuit loaded with smooth start, duration max. 0.5 seconds link circuit loaded via compensating resistance, duration max. 0.1 seconds Ready-to-operate contact Bb of drive module closes **Bb** and **Power** of the drive module are also lit up **Power ON** of the supply module lit up Drive package ready-to-operate (ready for controller enable) 3 Activate drive via controller enable signal at terminal RF Drive working Drive working, omitting torque Speed adjustable via voltage at set-point input **RF** also lit up Low speeds: **BLC** flashing Higher speeds: **BLC** constantly lit up Controller release signal RF turned off **RF** goes off Drive torque free after approx. 300 ms When using the differential inputs E1-E2 the set-point is immediately internally switched to zero and the drives brake. bFlußdiagramm • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 107 6. Commissioning 6.5. Checks with control voltage applied Note: (1) in the following text means: does not applied to KDS1 and older types TDM1, TDM2 with serial numbers below SN 233 ..., TDM3 with serial numbers below SN 240060-... TDM4 with serial numbers below SN 240062-... 1. Power separation First, the power input fuses at the mains should be removed, or the power load between the driving equipment and the mains must be securely separated by some means. 2. Switch-on control voltage Switch-on control voltage for the supply module (also see power-up sequence, Chapter 6.4). The green diagnostic display lamps • „24V/+15V“ • 1 or 2 lamps „BLC1, BLC2, BLC3“, and, • „tacho“ of the servo drive module light up as well as • „Bb“ (1), which flashes. If „RF“ (1) is blinking, then the drive has already been enabled by the externally connected voltage at terminal RF. To avoid any unnecessary start-up after switching on the power, power to terminal RF should be turned off. Lamp „RF“ then goes off. If there are no problems, and, if the end plug has been plugged-in, then signal contact „Bb1“ of the supply unit closes. 3. Measure voltage rates +15V, -15V, +24V at the supply module and servo drive motor. The 24V voltage rate can, depending upon mains under or over voltage, be either higher or lower in the TVM1. 4. Fan: It should be checked whether the fans – in all modular units – in all ventilated motors are running and whether the air can enter and exit without obstruction. 5. Blocking brake controller (if one is present): – First check whether the blocking brake connecting voltage ranges between +21.6V and 26.4V (24V plus/minus 10%). – The controller enable signal to activate the drive, and the signal to release the blocking brake or any other axis block, should be given simultaneously. It must definitely be checked to see whether the axis clamp releases upon input of signal. – The mechanical brake must be released prior to running the drive (Fig. 73) to avoid wear and tear. – The mechanical brake should not be actuated until after the drive has stopped to avoid wear and tear. 108 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning Controller enable at terminal RF Drive on Drive off Drive working 300 ms Controller signal for brakes Release lag t L Brakes released Terminal lag t k Brake clamped Set-point tBremsen Figure 73: Intervals for clamping and releasing the blocking brake during operation. The tK and tL values are listed in the motor data sheets. 6. Check link circuit short-circuit (if one is present): The control switch must guarantee that the mains contactor does not close until the link circuit short-circuit contactor has been opened before hand at the correct time. Otherwise, there is the danger of damaging both the link circuit resistance and the contactor. Using the link circuit short circuit to brake is not suitable for constant cyclical switching, but only for emergency off situations, or, if the limit switch has been overrun. 7. Emergency-Off Functions After hitting the emergency-off switch – – safely open the power contactor on the mains, – the link circuit short circuit should snap in, if it has been built in, – the control enable signal at terminal RF must be switched off via a contact, – the mechanical brake has to snap in, to the extent that it is needed. This should be checked using the controller switch. (Recommendations can be found in the description of the supply module used.) It must be guaranteed that the control voltage is maintained and remains on when power is shut off or in an emergency-off situation. This makes it possible for any occurring faults and intereferences stored in the equipment to be afterwards read-off from the diagnostic display. Only the master switch can completely shut down power to the machine. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 109 6. Commissioning 8. Switch off master switch. 9. Re-secure mains fuses, or reconnect the power lines between the drive equipment and the mains. Clamp off the connecting wire for controller enable at terminal RF, just to be safe. 6.6. Checks after the power infeed has been connected. Switch on controller and power voltage As soon as the link circuit has reloaded itself via the mains contact to minimum level, and if no fault is present, then the following green diagnostic lamps must remain lit-up: On the supply module: • „power-on“ On the servo-drive module: • „power“ or „PWR“, and, • „Bb“ • the ready-to-operate contact „Bb“ of the servo-drive module closes. The drive is now ready to operate. Measure link circuit power There are high voltages at the link circuit busbars, mains and motor power connections. It is, therefore, necessary, before accessing hot parts, to disconnect the equipment from the mains, just to be safe, and await the discharge time. Using a multitester, check the link circuit voltage between connecting bolt L+ and L-. The values should range from 255 to 360 volts. Maximum values approximately equal: – 325 volts for mains nominal voltage, and, – 360 volts for mains overvoltage, if the drives have been shut down. Should link circuit voltage be too high, then a wrong transformer or an improper connection could be the reason. If it is too high, then this could be caused by a missing phase, an improper transformer or an incorrect connection on the transformer. 110 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning 6.7. Check after the drive has been connected. Before activating the drive, make sure that sufficient accident preventive measures have been taken, in accordance with Chap. 6.1. In addition, measures must be taken to avoid damage to the machine which could result from a sudden running of the drive. Possible measures could, for example, be: – Make certain that all safety measures necessary for commissioning are functioning properly. – The emergency-off button is easily and readily accessible. – Make certain that there is sufficient clearance between the safety limit switch and the limit stop, if a servo-axis is used. The path to the fixed stop should be as long as possible. – If, in extreme cases, sufficient protection cannot be guaranteed when commissioning as a result of faulty drive movements, then the servo motor should be uncoupled from the mechanics with the first commissioning. 1. Switch controller voltage and power off. Clamp off all set-point cables and servo drive motors. 2. Attach set-point encoder: Connect controller enable at terminal RF and clamp on set-point at terminals E1-E2, according to the following figure. Servo drive unit set-point inputs: E4 or S1 Vsoll or 0V M E2 V G 10....15 V + P RF V = n soll soll S2 RF supply unit R1 - < 0VM R2 10k E1 10k E3 24VL G: battery for voltage supply P: Built-in d.c. voltmeter for Vsoll display R1: 10-speed potentiometer for adjustable Vsoll R1: Protective resistor S1: Three-pole throw-over-switch S2: Switch for controller enable (RF) BattboxAnschl Figure 74: Connecting the set-point encoder. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 111 6. Commissioning • Note on commissioning a master-slave (tandem) drive: In this case, the master and the slave drives are simultaneously commissioned. Both the speed set-point and the controller enable are connected to the master servo drive module. The slave drive is then simultaneously controlled by the master servo drive module, in accordance with the connecting planes outlined in Chap. 2.4. Check whether the master and sequential drives are mechanically free of play and have been reliably connected to each other so that the slave drive cannot, as a result of the input set-point voltage, run up uncontrolled if the mechanical connection should loosen because of a fault. This connection should be as rigid and as stiff against torsion as possible to avoid any soaring of the mechanics. It is not possible to commission only the slave drive. The setpoint, in this case, directly corresponds to torque so that input even of a very low set-point voltage to the slave drive module means that the slave motor will run up rapidly. The torque of the master-slave drives must run in the same direction. This particularly applies to hanging axes. If they effect the mechanics in the opposite direction, then rotation direction of the slave drive must be turned around with a bridge 1 at the feedback plug (see connection plans, Fig. 12 through 16). • Note on NC operation: In this case, the drive can also be commissioned via the NC, if there can be a reliable and controlled input of set-point and controller enable to the drive. The initial commissioning of a new machine (prototype commissioning) makes the opening of the position control circuit and the uncoupling of the NC, in the event of a problem, a practical idea to better help restrict these problems and faults. This also, in particular, applies to drive oscillations, should these occur. Safety guidelines for this area of application should be followed (see Chapter 6.1) 3. Switch off controller enable on the set-point encoder box and set to zero. Remain ready to immediately initiate an emergency-off, should the motor run uncontrolled. 4. Switch on control voltage and then power voltage (mains on). 5. Switch on controller enable. Set low set-point. The motor should rotate as indicated by set-point voltage. 112 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning 6. Allocating set-point voltage and motor speed. The input values can, in accordance with the information on the MOD programming module, be checked. A set-point input voltage of X volts equals a speed n of n max and Ue are listed in the MOD programming module under column „Input/Rpm“. The formula to be used is: nmax n = ——— • X Ue in min-1 The motor can now be coupled to the machine if it was previously decoupled. 7. Stopping in an emergency-off situation: The safety limit switch should be mounted with sufficient distance to the limit stop, and the cams should be checked for sufficient length. Run the axes individually and at maximum speed onto the safety limit switch. Measure the stopping distance and check to see whether it was long enough. This task should be performed in both directions of a vertical axis. 8. Drift compensation: No compensation is neeeded with torque-controlled or slave drives! Using the adjustment screw, „ZERO ADJUST“, on the right-hand side at the bottom on the front, the zero-point drift can be set to speed zero, if a set-point of 0 volts is given at the corresponding plug-in terminal in the open position-control circuit. The speed drift is determined by observing axis movement or motor speed, or it can, if necessary, be measured at terminal Tsense. The interaction of the NC, feed drive, position measurements and coupled-in mechanics in the position and speed control loops is outlined in Fig. 75 using the example of a direct measuring system. 6.8. Matching to the NC Position control loop Numeric controller NC Set-point w Speed control loop VSet-point VSet -point Kv Xw + X deviation Actual position value X VSet-point=Kv • Xw Speed control loop AC-tacho Actual value T -Vactual value Servodrive +VSet-point module M Machine sliding carriage 3 AC-Motor Programming module Posregel Figure 75: Position control loop with direct measuring system. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 113 6. Commissioning 1. Operational sign of the path feed direction (machine coordinates) Operate the drive, at first, with the set-point encoder box. It is necessary to check whether the path feed direction indicated by the NC agrees with the actual direction of movement. If it does not, then it should be re-poled according to Chapter 2.1, page 17, in the direction of rotation. 2. Check the drift of the drive with zero speed set-point: If the axis moves with zero speed set-point, then using the potentiometer „ZERO ADJ“ on the front plate, set the rotation movement of the axis to zero with control cabinet end temperature. This should always be checked after initial commissioning and after the servo drive module has been exchanged. 3. Checking the position control loop: – Using the set-point encoder box, enter low positive speed set-point voltages of a few mV at the set-point input of the servo-module and run the axis. – The controller must emit a negative set-point voltage for the axis. The polarity of the actual position value must be changed, if this is not the case. 4. Switching and clamping off the set-point box. Connect set-point line and the controller enable from the controller to the servo drive module. 5. Check input weightings: The speed set-point input weightings of the servo drive module must be rated in such a way that maximum motor speed or maximum sliding carriage speed is achieved with 80 to 90% of maximum NC output voltage. This ensures that the position controller remains within the active range, even with minor overshooting in the NC output voltage. Input ratings can, if needed, be changed on the programming module in accordance with the data in Chapter 3.2. 6. Check set-point smoothing: The NC rated speed set-point values may not exceed the alternating current share of 0.01 • f • Uin Volt f: U: with frequency of the superimposed pulsating component in kHz maximum value of the NC output direct voltage in volts otherwise, stability problems will result. 7. Many numeric controls change their output voltages only gradually in agreement with the computers cycle time. Since the drives attempt to follow every set-point gradation of the step-function, the effects are – unnecessary motor power loss, – increased machine stress, – noise development during acceleration and braking, and, – machine vibrations during interpolation. 114 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning If such disruptive, harmonic vibrations should appear on the tacho signal - can be measured at terminal Tsense of the servo drive module - as a result of the set-point voltage emitted by the NC (step function) - can be measured at input of set-points at terminals E1-E2, E3 or E4 of the servo drive module - then it is possible to achieve a reduction in the oscillations by soldering a capacitor (set-point smoothing) on programming module MOD, in accordance with Chapter 3.2. It should be, however, noted that a big capacitor can reduce the dynamics of the position control loops and thereby also make it less responsive (smaller Kv factor). Determining factors: C5 = ca. 0,15 x Tnc C5 Capacitor on programming module MOD in uF Tnc Station time of the set-point output of the NC in ms 7. Optimization the position control loop An optimization of the position-control loop with linear movement is primarily achieved via the Kv factor in the NC: Kv = V/ Xw in m • mm ———— min V: speed in m/ min Xw = Xset-point - Xactual: position deviation This is increased until a stable and rapid response of the position controller is achieved (see information in NC User Handbook). 6.9. Checking Drive Configuration These tests are recommended to the machine manufacturer when the drives are initially commissioned or with prototype commissioning. They serve to determine whether the drives have been sufficiently adjusted to meet the demands made by the construction of the machine or plant. An oscilloscope with memory or an analogue recorder are needed for the measurements. Measurements must be taken in both directions. 1. The stability of the control loop The drive is operated using the set-point battery box, in accordance with Diagram 74. Should mechanical oscillations occur right after the servo drive is switched on via the controller enable while the equipment is still standing still or in the movement of the drives, then the mechanics have not been sufficiently secured against oscillations. Possible causes: – The coupling of the load mass to the motor shaft is too elastic. This causes resonance vibrations with the outside inert mass. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 115 6. Commissioning – The external inert mass is too great. The speed control loop becomes unstable. Generally, the ratio of the motor’s own mass to external mass at the motor shaft equals 1:5. – Instability of the machine’s mechanics. – Low frequency oscillations at position due to changes in the friction ratio which are not constant (stick-slip-effect). These oscillations can be verified by measuring the tachometer signal at terminal Tsense using either an oscilloscope or a recorder. Oscillations with low amplitudes require a fine adjustment of the oscilloscope or a measurement at terminal „MA“. If the mechanics of the machine can definitely be excluded as the source, or if a structural alteration in the mechanics is too expensive, then a special drive optimization by changing the values of programming module MOD can bring about an improvement. This can, however, also simultaneously bring about a deterioration in the dynamics at the machine axes. In this case, INDRAMAT’s customer service should be consulted prior to changing the wiring of programming module MOD. When calling in a problem to INDRAMAT’s customer service, the following information is important: – Mechanical construction of the coupling to the servo motor and the entire axes? – Outside moments of inertia coupled in as relate to motor shaft? – Continuous or intermittent oscillations and at what stage of operation? – Size of the oscillation amplitudes of the voltage measured in volt peak-peak? – Duration or frequency of vibrations? 2. Basic torque at different speeds. Load moment can be measured at terminal „MA“ of the servo drive module, where the current set-point can be read, as the current consumption of the servo drive is a measurement for the given torque. The corresponding current is calculated UMA I = —— kMA in A with kMA in V/ A from Chap. 10.2 UMA in V measured at terminal „MA“. 116 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 6. Commissioning A comparison of this Value I with the Value I(dN) of the motor’s permanent or rated current, to be found listed either on the table in Fig. 95 in Chapter 10.1., or on the rating plate of the motor, indicates the torque load of the servo-drive. These measurements are to be taken at minimum and maximum feed speed, run during a later stage of operation during processing. The current measured at MA should not be greater than 60% of the motor’s permanent current. If the current measured should be greater, then the possible causes for an excessive basic torque, despite correct construction, can be: – axis clamp not released – mechanical jams at the drive axis – insufficient lubrication – increased adhesive or sliding friction at the carriage guides – unfavorably adjusted weight compensation The corresponding torque of motor current I of the measured voltage UMA at terminal MA can be calculated as follows: UMA M = km • I = km • —— in Nm kMA km: Current-torque-constants in Nn/A (from Fig. 95 of Chapter 10.1) kMA: from Fig. 96 in Chapter 10.2. in V/A 3. Rapid Return Motion Torque Measure as described under 2. The current at MA should not exceed 75% of the motor’s rated current. Should the current exceed this, then the possible causes for excessive rapid return motion torque, despite proper construction, can be: – unfavorable hydraulic or pneumatic weight compensation – excessive liquid friction in the gear-tooth system of an attached oilbath gearbox – a breakdown in the lubricating film of the sliding guide – poor ball return in the nut of the ball roll spindle. 4. Adjusting weight compensation with vertical axes The weight should be compensated so that the motor current input with the up and down motions of the axes always retains the same minimum value. The adjustment should be checked at feed and rapid return motion speeds. 5. Acceleration times In this case, speed as a function of time (run-up curve) when accelerating and braking to the necessary speed, is recorded with • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 117 6. Commissioning either an oscilloscope or a recorder. Speed output serves as the measurement signal (tacho) at terminal „Tsense“. The evaluation cw in V/ A depends upon the type of motor and is listed in Fig. 95 of Chapter 10.1. The corresponding acceleration moment, or current can simultaneously be recorded at terminal „MA“. (The evaluation in V/ A is dependent upon the servo drive module and can be found in Chapter 10.2). When operating the NC in controlled position, the torque should only reach its maximum value in the first phase of the acceleration/braking procedure, while remaining below maximum value over the remaining period of time in order to maintain sufficient reserves and avoid overshooting its position. Acceleration and braking times must be measured and compared to the design data. 6. Controlling Feedback Energy – Accelerate all the drives connected to the supply unit to maximum speed and then initiate an emergency off. A shutdown of the power section via the ready-to-operate contact Bb1 of the supply unit cannot take place. – Run the drives for at least 15 minutes in an operative load cycle during which the highest mean braking energy of all drives can be expected. In this case as well, the power section should not be switched off via the ready-to-operate contact Bb1 of the supply unit. Should a switch off nonethless occur in either of the two cases, then the supply lay-out must be corrected (see supply lay-out description). It is possible that a different supply module or an additional modular unit (TBM or TCM) is required. This depends upon the drive type connected. 118 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics 7. Fault-Finding and Diagnostics In the event of a problem within the machine or the facility, it can be advantageous to proceed in accordance with the following steps to quickly eliminate faults and resume operation: 1. Determine nature of problem. (Can improper operation or incorrect installation be eliminated from the start?) 2. Follow the effects of the fault and limit the source of the fault. 3. Determine direct cause of fault, defective part. 4. Correct error and control operation. About Step 1: The assumption is made that the checks on the drive equipment, mounting and installation, as outlined in Chapters 6.2 through 6.4, have already been performed. This is generally the case with an already constructed and operating machine. About Steps 2 through 4: INDRAMAT’s drives offer definite advantages when searching for and eliminating problems. Long-term searches for problems in individual units and repairing the drive components of the individual machines are not acceptable because of the loss in production that this loss in time represents. The diagnostic displays and the message signals at the interfaces between drive and controller (terminal strip on the drive module) make a to-the-point and effective problem search possible. The exchange of individual compact drive components such as supply module, drive amplifier, motor or cable permit a speedy and problem-free elimination of the problem and resumption of operation without lengthy mounting and adjustment work. Programming modules MOD, optimized and ready-to-use from the factory, make an adjustment-free exchange possible. 7.1. Construction of the monitoring system within the modules (Fig. 71) In the event of a problem in the drive system, the ready-to-operate command is lifted and the at-zero-potential ready-to-operate contact Bb1 in the supply module and Bb in the drive module open. The opening of the Bb1 contact must achieve, via the controller, – an immediate mains separation (mains contactor must release), – the drive’s mechanical brakes, (if present), snap in, – the activation of the link circuit short circuit as an additional electrical brake for the MAC servo motors, (if present). An overview in Figure 72 of the internal drive monitor offers insight into the effect of an internal fault. A fault in the supply unit is signalled to the drives via the internal „UD“ message X1.1 of the plug-in terminal X1 between the modules. The connected drives decelerate to speed zero and are then subsequently locked (after approximately 300 ms), i.e., switched torque-free. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 119 120 Fault in supply module Link circuit d.c. voltage drops below minimum value Fault memory RESET-Key Power supply for signal processing plus/minus15V, +24V; monitoring via plug-in terminal TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 & Bb1 Ready-to-operate drive system in the supply module Bb1 Supply module & X1/2 X1/1 X1/2 Endstecker X1/3 Bb Ready-to-operate servo drive module Bb & & Fault memory RESET-Key All inputs assume the logical level "low" in the event of a fault. 1. If inputs E1/E2 are used, then, in the event of a fault the set point is internally switched to 0 min -1 . 2. The drive is shutt off after approximately 300 ms. Fault in the voltage supply for signal processing plus/minus15V, +24V Fault in drive module Servo-drive module 7. Fault-Finding and Diagnostics The same thing occurs with a fault in the servo drive module. The drive fault is then signalled to the supply module via the BB return signal cable X1.2 of the bus X1, where it permits the Bb1 signal contact to drop. ÜbwachAntriebssys Figure 76: Internal monitoring of the drive system supply module-drive module 7. Fault-Finding and Diagnostics 7.2. Effective fault-finding The safety guidelines as outlined in Chapter 6.1 must be noted when troubleshooting in the machine. 7.2.1. Possible causes of malfunctions, general Faults in the machine or the facility can have very different causes. Drive movements can be effected by faults in the following areas: 1. Mechanical coupling or transmission elements at the motor shaft (loose, elasticity, conversion, moments of inertia, jams, friction) 2. Mechanical stability of the machine’s frame (rigidity) 3. Position measuring systems, position encoder 4. Numerical control (NC, CNC) 5. Other controllers (SPS) 6. Driving systems with – supply modules – drive modules – motor cables – motor with feedback electronics 7. Mains connections with transformers, throttles and controller loops with contactors and auxiliary relays. 8. Conditions of the electrical mains 9. Electromagnetic influences caused by equipment or machinery working with frequencies higher than the mains frequency, or the use of large amounts of energy. 7.2.2. Fault messages at the terminal strips The machine user should first check the fault messages at the terminal strip (cross-section) of the module in the event of a problem. These signals can easily be evaluated directly at the controller and are displayed on the control panel. There is an overview of interface signals in Fig. 80. The Bb1 contact of the supply module is integrated, in accordance with the recommended controller description, to the supply unit in the emergency-off loop. The Bb contact of the servo drive module for activating the mains feed is also then used if the commissioning current needs to be restricted with the use of resistors (only applies to supply modules TVM1, TVM2 and KDV1). In the presence of either a mains fault or a mains failure, or if emergency off is activated, then this fault message is generally transmitted to the drive module via cable X1.1. There it brings about a deceleration of the connected drives and the internal switching off of the controller enable after approximately 300 ms. It is possible in the case of some of the supply units (not with TVM1, TVM2 and KDV1) to have the NC, with a clamped on NCB bridge, brake the attached drives in either an emergency off situation or with a power failure. This obstructs the transmission of the signal via X1.1. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 121 7. Fault-Finding and Diagnostics The prerequisite, in this case, is that the occurring braking energy of all the mounted drives is greater than the energy expended by the motor for the feedback action conducted by the NC and the link circuit output for the signal electronics. It is not permissible to conduct the controller enable over the auxiliary contact of the mains contactor as it would, in this case, be immediately shut down. It must always be guaranteed, even with a closed NCB bridge, that the drives can be shut down in the event of a fault - even in the NC. Drive Module (A fault in the drive system means a fault in the supply module, drive module, cable or motor.) Terminal Designation Terminal Strip Output Bb Contact closed * The drive is ready to operate. No faults in drive module. Diagnostic lamp „Bb“ lit up. Contact open * No power, or there is interference, or * Check power connection and supply module. * Fault in drive system * Check diagnostic display on the front plate of the modular unit acc. to Chapter. 7.3. Meaning of Message TÜ Open collector(only TDM 3, output open TDM 4, (high-impedance) TDM 6, TDM 7) TÜ (only KDS) Eliminate Fault * No fault Open collectoroutput at 0 volts (low-impedance) * Equipment temperature too high: If drive load is not reduced within 30 seconds, the system will be shut down. Diagnostic lamp „TÜ“ is lit up. Contact closed * No fault Contact open * Equipment temperature too high: If drive load is not reduced within 30 seconds, the system will be shut down. Diagnostic lamp „TÜ“ is lit up. Reduce drive load. Contact TÜ can be evaluated via an external controller. Reduce drive load. Contact TÜ can be evaluated via an external controller. Figure 77: Summary of the drive module messages issued at the terminal strip. 122 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics Supply module (fault in drive system means fault in supply module, drive module, cable or motor.) Terminal Designation Terminal Strip Output Meaning of Message Fault elimination Bb1 Contact closed * Ready to shutdown power. No fault in driving system. - Contact open * Controller voltage/mains auxilliary voltage lacking at supply module or * Fuse down * Fault in drive system * Plug-in end terminal X1 * Control diagnostic display on the front plate of the modular unit, acc. to Chap. 9.2.3. * Check fuses. * TVM only: supply module defective due to excessive deceleration energy (ballast resistance overloaded)——> * Exchange supply module BVW (only KDV 2, TVD 1) Contact closed * No fault Contact open * Mean time of drive deceleration too high. tion at end of set, or, by an additional 25%, then terminal Bb1 will open.) TVW Contact (only KDV 3, closed KDV 4,TVD 1) Contact open UD Contact (only KDV 2, closed KDV3, KDV 4, TVD 1) Contact open * Reduce speed, * Initiate emergency off func(If mean load increases * Take a break. (Can be recognized and executed by means of external controller.) * No fault * Too much power run on average with the mounted drives; temperature in power section too high. * Shutdown via terminal Bb1 in 30 seconds; diagnostic display lamp „TÜ“ will light up. * Reduce drive load within the 30 seconds or run free and shut down. (Can be recognized and executed by external controller.) * Mains feed on supply module working. Mains fault present: * Mains failure, phase failure * Voltage too low * No right rotational field (only applies to KDV3 and KDV4) * Check mains feed * Check diagnostic display on the supply module, acc. to Chap. 7.3 * The NC can be shut down during operation when UD terminal open, if NCB bridge on terminal strip is closed. If NCB bridge is open, then shut down occurs internally via the drive by internal switching of set point to zero. Figure 78: Summary of the drive module messages issued at terminal strip • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 123 7. Fault-Finding and Diagnostics Terminal Designation Terminal Strip Output Meaning of Message NH (only KDV 2, KDV 3) Open collectoroutput open (high-impedance) Mains auxiliary power properly applied to mains input terminal of the supply module. Open collectoroutput at 0 volts (low-impedance) No mains auxiliary power at terminal L1-L3. Diagnostic lamp „AUX: VOLT“ lit up * Fans simultaneously not being supplied. Should mains auxiliary fail for longer periods of time during operation, then the motors will shut down after a specific length of time because of overtemperature. * Power cannot be turned on until mains auxiliary power is applied. Open collectoroutput at 0 volts (low-impedance) Mains auxiliary power properly applied to mains input terminal of the supply module. Open collectoroutput open (high-impedance) No mains auxiliary power at terminal L1-L3. Diagnostic lamp „AUX: VOLT“ lit up * Fans simultaneously not being supplied. Should mains auxiliary fail for longer periods of time during operation, then the motors will shut down after a specific length of time because of overtemperature. * Power cannot be turned on until mains auxiliary power is applied. * Check the mains auxiliary power connection * If mains auxiliary power applied to terminals L1-L3, then the supply module is defective. Contact closed Internal mains contactor released Check unit controller Contact open Internal mains contactor attracted Contact closed Internal mains contactor attracted Contact open Internal mains contactor released HSM (only KDV 4) K1NC (only TVD 1) K1NO (only TVD 1) Fault Elimination * Check the mains auxiliary power connection * If mains auxiliary power applied to terminals L1-L3, then the supply module is defective. Check unit controller Figure 79: Overview of drive module messages issued at terminal strip. 124 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics 7.3. LED Diagnostic Displays If the fault cannot be located using the messages received at the terminal strips, then the diagnostic displays on the front side of each modular unit, beginning with the supply module, need to be checked. This can be quickly accomplished by using the figures in Chapter 9. The most practical thing to do first is to check to see whether the light emitting diodes are displaying the condition „working“, as indicated in these figures. In the presence of a malfunction, the green lamps generally light up, while the red lamps should be off. Clearing a Fault: A reset-key makes it possible to clear all stored fault messages without having to shutdown the mains auxiliary power/control voltage on the supply module. It is located on the front on the right hand side at the top above the diagnostics display. The fault messages are automatically cleared and reset after the control voltage has been turned back on. 7.3.1. Diagnostic Displays on the Power Supply Modules If the diagnostic displays on the supply or driving modules indicate a fault, then the following measures can be taken individually: The diagnostic displays are only valid if lamp „24V, plus/minus 15V“ is completely lit up. Power o. k. green With fault ➞ off No power or fault present. Possible fault causes and measures: – Link circuit throttle connection of the supply module not allocated (does not apply to TVM 1 and 2). ➞ Check whether the throttle on the link circuit throttle connecting terminals 1L+, 2L+, 1L-, 2L- has been properly attached, or whether a wire strap has been clamped on. – No mains power ➞ Check three-phase mains power connection (Look for fault between mains connection and supply unit.) ➞ Check the mains contactor control – Mains voltage too low ➞ Test mains power at connecting terminals L1, L2, L3 of the supply module. ➞ Incorrect transformer connection or fault in mains – Mains power phase missing ➞ Check and re-measure 3-phase mains power at the supply module ➞ Check link circuit short-circuit ➞ Check mains fuse • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 125 7. Fault-Finding and Diagnostics – Only applies to KDV2, 3 and 4: No right rotational field present (fault only occurs the first time the machine or the drives are connected to the mains). ➞ Check rotational field direction at connecting terminals L1, L2, L3 of the supply module (e.g., with the use of rotational field measuring equipment, or the succession of phases with an oscilloscope). Exchange leads L1 and L2 on the supply module if there is no right rotational field. Absolute attention must be paid that mains auxiliary power connections L1, or L3 remain connected inphase to power connections L1, or L3 of the supply module KDV, in accordance with connection plans. – Supply module defective ➞ Remove intermediate circuit busbars and bus cable X1 between the supply module and the driving module, then repeat the above check. If no fault can be found now, and the LED „power OK“ of the supply module is lit up, then the fault is in the connected drive modules. ➞ Exchange supply modules. +24V, ±15V green (Only units: TVD 1, KDV 3, KDV 4) With fault ➞ off The control voltage for the signal electronics is faulty, or exceeds tolerance (the values should range between plus/minus 15V : 14.75 ... 15.25 volts, 24V: 22.3 ... 32 volts). Should this LED flash or not light up, then all other diagnostic messages are invalid! Possible fault causes and measures: – Only applies to KDV3 and KDV4: No mains auxiliary power at supply module input ➞ Check mains connection for auxiliary power – Short-circuit in the signal electronics in at least one of the connected drives (in drive module, feedback cable, or motor feedback). ➞ Remove the individual line connectiions (bus connection X1, feedback cable, wiring on the terminal strips) and then ➞ measure the 24V, plus/minus 15V voltages at the connection points or terminals and, in this way, begin to limit the fault (generally shortcircuit). – Maximum load of the control voltage plus/minus 15 V or 24 V is being exceeded. ➞ Check current load via the connected drives in accordance with the data sheet (current input). – Only applies to KDV3 and KDV4: Defective unit fuse in the supply module ➞ check fuses, ➞ if fault remains, find the fault on the 24 volts or in the fans, and eliminate it, ➞ put in new fuses. 126 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics AUX. VOLT With fault green (Only units: KDV 2, KDV 3, KDV 4) ➞ off No auxiliary mains power at terminal L1-L3 and fans not working (risk from excessive temperature). Possible fault causes and measures: – Mains failure ➞ Nothing needs to be done Drives will continue only as long as there is sufficient power in the link circuit – Supply module fuses defective ➞ Check fuses, ➞ See LED "24V, +15V" ➞ Insert new fuse – Supply module fuses defective (Line break, circuit contact defective) ➞ Check connection and controller of the mains auxiliary voltage between mains and supply module. ➞ Do not run drives for longer periods of time at full load because fan switched off. Eliminate fault. MAINS FAULT or MAINS O.K. green (Only units: TVD 1, KDV 4) With fault ➞ off Mains fault displayed. Mains power disrupted or improperly connected (voltage too low, phase missing, no right rotational field) Possible fault causes and measures: – No mains voltage ➞ Measure whether there is mains voltage at connecting terminals L1, L2, L3 of the supply module. (Look for fault between mains connection and supply unit.) ➞ Check controller of the mains contactor. – Mains voltage too low ➞ Measure mains voltage at connecting terminals L1, L2, L3 of supply module. ➞ Improper transformer connected or fault in mains. – Only applies to KDV4: Right rotational field present (fault only occurs the first time the drives or the motor connected to the mains). ➞ Check rotational field direction at connecting terminals L1, L2, L3 of the supply module (e.g., using rotational field measuring equipment or the succession of phases with an oscilloscope). If there is no right rotational field, then exchange lines L1 and L2 on the supply module. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 127 7. Fault-Finding and Diagnostics – No phase ➞ Re-measure the three phases of the mains connection voltage ➞ Check mains connection ➞ Check mains fuses – Supply module defective ➞ Separate link circuit busbars and bus cable X1 between the supply and drive modules and repeat the above test. If the mains voltage is working after the above test has been run and the LED „power OK“ of the supply module is off, then the supply module is defective. If „power OK“ is lit up, then the fault is in the connected drive modules. ➞ Exchange supply modules OVERVOLTAGE or OVERVOLT FUSE red (Only units: TVM, TVD 1, KDV 1) With fault ➞ on Temperature of the loading resistance (bleeder) too high or power section is defective. After the fault has been eliminated, press the black reset key on the front above the diagnostic display to re-start. Possible faults and measures: – Mains voltage too high: ➞ Re-measure the voltage at terminals L1-L2 – Only applies to TVM, TVD 1: Incorrect wiring of the additional bleeder module TBM ➞ Check wiring in accordance with connection plan – Only applies to KDV1: Fan not running or air inlet and outlet obstructed ➞ Check the fan behind the heatsink ➞ Check fan fuses or Internal temperature of control cabinet too high ➞ Improve ventilation/cooling of control cabinet – Deceleration energy of all drives too high: 1. The fault does not occur until after several deceleration procedures. (The deceleration energy fedback over a mean period is too high.) ➞ Check the load and processing cycles of the drives and reduce if necessary. ➞ Only applies to TVM: An additional bleeder module TBM or additional capacitance TCM must be additionally installed. 2. Fault already occurs after the first drive deceleration (generally in an emergency-off). (The deceleration energy occuring short-term and fedback is too high.) ➞ Only applies to TVM: An additional bleeder module TBM must be installed. ➞ Reduce energy content of the drives (moment of inertia or max. speed). 128 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics – Only applies to TVM, TVD 1: Additional bleeder module TBM defective ➞ Exchange additional bleeder module TBM – Supply module defective ➞ exchange supply module BLEEDER OVERLOAD red (Only units: TVD 1, KDV 2, KDV 3, KDV 4) With fault ➞ on Deceleration energy of all drives too high (especially in emergencyoff) or the supply module is defective. After the fault has been corrected, press the black reset key on the front of the disagnostics display to re-start. Possible fault causes and measures: – Mains voltage too high ➞ Re-measure voltage at terminal L1-L2 – Fan not working or air inlet or outlet obstructed ➞ check fan ➞ check fan fuses – Control cabinet internal temperature (ambient temperature) is too high ➞ improve ventilation/cooling in control cabinet – Only applies to KDV2 and TVD1: deceleration energy of all drives too high 1. Fault does not occur until after several drive decelerations. (The deceleration energy fedback over a mean period of time is too high.) ➞ Check the load and processing cycles of the drive and reduce, if necessary. 2. Fault already occurs after the first drive deceleration (generally in emergency-off). (The short-term deceleration energy fedback is too high.) ➞ An additional TBM bleeder module must be installed. ➞ Reduce the energy content of the drives (moment of inertia or max. speed). – Supply module defective ➞ Exchange supply module EARTH CON. red (Only units: KDV 2, KDV 3, KDV 4) With fault ➞ on Ground leak in the supply module, drive module, cables, motor or power wiring. After fault has been eliminated, press black reset key on front of diagnostics display to re-start. Possible fault causes and measures: ➞ Check all drive modules for fault message „BS“ to immediately determine a drive with a defective drive module, cable or motor. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 129 7. Fault-Finding and Diagnostics – Ground leak in supply module ➞ Remove intermediate circuit busbars. If fault should occur again, then the supply module is defective. If it does not, then the ground leak is in the connected drive components. ➞ Exchange supply module – Ground leak in the power wiring ➞ Visual check of all connections and terminal connections (e.g., intermediate circuit busbars L+, L- cable connection A1, A2, A3 motor terminal box) for earth contact as well as all lines for insulation failure. – Ground leak in a motor ➞ Remove all motor cables at the motors. If no ground leak occurs, then ground leak is in motor. ➞ Exchange motor – Ground leak in the motor cable or drive module ➞ Clamp off motor cable of the drive modules. If ground leak does not occur, then the motor cable is defective. Otherwise, there is probably a ground leak in the drive module. ➞ Exchange motor cable ➞ Exchange drive module OVERCURRENT red (Only units: TVD 1, KDV 3, KDV 4) With fault ➞ on Excess current or short-circuit in the power section of the supply or drive modules or in the motor. After the fault has been eliminated, press the black reset key on the front of the diagnostics display to switch back on. Possible Faults and Measures: ➞ Check all drive modules for fault message „BS“ to quickly find a drive with defective drive module, cable or motor. – Short-circuit at connecting terminals 1L+, 2L+, 1L-, 2L- of the supply module for the link circuit throttle. ➞ Check whether the link circuit throttle or the wire strap at this terminal has been properly connected in accordance with the connecting plans. – Fault only occurs when decelerating the drives: mains inductance too high. – Programming module MOD does not fit into the drive module - motor combination ➞ Check the rating plate information of all drives with the respective drive module and motor type to see whether they match. – Short-circuit in the supply module ➞ Remove link circuit busbars from supply module. If fault occurs again, then supply module is defective. Otherwise, the short-circuit is in the connected drive components. ➞ Exchange supply module. 130 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics – Short-circuit in the power wiring ➞ Visual check of all connections and terminal connections (e.g., link circuit busbars L+, L-, cable connections A1, A2, A3) as well as all lines for insulation damage. – Short-circuit in a drive module ➞ If the red LED „BS“ of a drive module should also light up, then the fault, in the case of this drive, is in the amplifier, motor or cable. ➞ Clamp off the motor cables on drive modules at A1, A2, A3. If a short-circuit should still occur, then the drive module is defective. Otherwise, the short is in the cable or motor. ➞ Exchange defective drive module – Short-circuit in a motor cable or the motor ➞ Disconnect the motor cable at the motors. Bridge thermostat contact. If short occurs now, then the fault is in the motor cable. Otherwise, the motor has an interturn short-circuit. ➞ Measure motor inturn resistance and exchange defective motor. TEMP. FAULT red (Only units: TVD 1, KDV 3, KDV 4) With fault ➞ on Shutdown due to excessive temperature. The temperature prewarning via contact TVW was ignored. After the fault has been eliminated, press the black reset key on the front of the diagnostics display to re-start. Possible fault causes and measures: – Fan not working, air inlet and outlet obstructed or the heatsink is dirty. ➞ Check fan ➞ Check fan fuse ➞ Clean heatsink, if necessary. – Inside temperature of control cabinet (ambient temperature) too high ➞ Improve control cabinet ventilation/cooling – Overall efficiency of connected drives too high ➞ Check the overall efficiency of the drives, a second supply module may be needed. – Supply module defective ➞ Exchange unit Bb1 CLOSED green (Only units: TVD 1) With fault ➞ off Ready-to-operate contact is open because there is a fault in the supply module or in drive. After the fault has been eliminated, press the black reset key on the front of the diagnostics display to re-start. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 131 7. Fault-Finding and Diagnostics Possible fault causes and measures: – Fault in supply module: ➞ Check the other diagnostics lamps to see what fault is present. The green lamp „+24V/+15V“ must be lit up. All red LED’s must be off. ➞ Exchange supply module – Fault in drive module: ➞ Check all diagnostic displays on the front of all drive modules, to see which fault is present. All red LED’s must be off. 7.3.2. Diagnostic Displays on the Drive Modules The diagnostic displays are only valid if the lamp „24V, plus/ minus +15V“ is lit up (1) = does not apply to KDS1 and the older units of the types TDM1, TDM2 with serial numbers below SN 233 ....., TDM3 with serial numbers below SN 240060-... TDM4 with serial numbers below SN 240062-... +24 V, ±15 V green With fault ➞ off Control voltage for signal electronics disrupted, or outside of tolerance (the values must range as follows: plus/minus 15V: 14.75 ... 15.25 volts, 24 V: 22.5 ... 32 volts). After the fault has been eliminated, press the black reset button on the front of the diagnostics display to re-start. All other diagnostic messages are invalid if this LED is either flashing or lit up! Possible fault causes and measures: – No mains auxiliary voltage at input of the supply module ➞ Check mains connection (open circuit, switching contact defective) ➞ Check connection and controller of the mains auxiliary voltage between mains and supply module. – Loose or defective bus cable connection X1 ➞ Bus cable X1 must be firmly plugged in, exchange if defective. – Short-circuit in at least one of the connected drives (in drive module, feedback cable, or motor feedback) ➞ Remove the individual connections (bus connection X1, feedback cable, wiring to the terminal strip), and then, ➞ measure the 24V, +15V voltage at the connecting points of the terminals in an effort to locate the fault (generally short-circuit). – Response during operation: The maximum load of the control voltage +15 V or 24 V is being exceeded. 132 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics ➞ Check the current load from the connected drives in accordance with the data sheet (current consumption). – Defective fuse in supply module ➞ Check fuse ➞ If fault still present, locate overload at the 24 volts or in the fans and eliminate. ➞ Put in new fuse BLC 1 green BLC 2 green BLC 3 green Rotor position signals: Only one or two diagnostic lamps should light up simultaneously during a shutdown or when the speed is low. The lamps blink at low speed. All three lamps appear to be lit up simultaneously at high speeds. Fault: A fault is present if all three lamps are simultaneously lit up during shutdown or with low speeds. Checking procedure: – Switch power to mains off (disconnect mains contactor). Switch only mains auxiliary voltage/control voltage on at supply module. – Disconnect motor cable from motor. – Release brakes. – Pull motor shaft through by hand and check all 6 states for correctness, in acc. with Fig. 80. Possible fault causes and measures: – Faulty connection of the feedback cable to the drive module ➞ check connection – Fault in motor feedback cable ➞ exchange cable – Fault in the motor feedback ➞ measure plus/minus 15 volts voltage of the motor feedback ➞ exchange motor – Fault in drive module ➞ Exchange unit Tacho With fault ➞ off green Interference in tacho signal or signals BLC1, BLC2, BLC3 (1). After the fault has been cleared, press the black reset key on the front of the diagnostics display to re-start. Possible faults causes and measures: – Faulty connection or break in the motor feedback cable ➞ check feedback connection ➞ exchange feedback cable • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 133 7. Fault-Finding and Diagnostics – Excessive motor speed ➞ check feedback connection ➞ exchange feedback cable – Motor feedback defective ➞ exchange motor – Servo drive module defective ➞ exchange unit – Fault in BLC signals ➞ check BLC signals, as described in LED „LBC1, BLC2, BLC3. BLC 1 BLC 2 BLC 3 1 1 0 0 0 1 1 0 1 1 1 0 0 0 0 0 0 1 1 1 0 1 = BLC LED on 0 = BLC LED off 1) 90 degrees mechanical with MAC 021, MAC 025, MAC 041 1) 120° mechan. BLC 1 BLC 1 t BLC 2 t BLC 2 t t BLC 3 BLC 3 t t right rotation of motor left rotation of motor BLCLeucht Figure 80: BLC LEDs and signal path 134 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics Power or PWR green With fault ➞ off No power applied or power disrupted. Possible fault causes and measures: – Link circuit busbars not sufficiently or not at all screwed in. Green lamp „power OK“ on the supply module is lit up. ➞ Check the fit of the link circuit busbars – Link circuit throttle connection of the supply module (if present) not allocated ➞ Check whether the throttle at the link circuit throttle connection terminals 1L+, 2L+, 1L-, 2L- are properly connected, or whether there is a wire strap present. – No mains voltage If green lamp „power OK“ at the supply module not lit up, ➞ check 3-phase mains voltage connection. (Look for fault between mains connection and supply unit.) ➞ Check the controller of the mains contactor. – Mains voltage lacks phase: ➞ check 3-phase mains voltage at the supply module and re-measure, ➞ check link circuit short-circuit, ➞ check mains fuse. – Only applies to KDV2, KDV3 and KDV4: No right rotational field (fault only occurs with first connection of machine or drive to the mains). ➞ Check the rotational direction at connecting terminals L1, L2, L3 of the supply module (e.g., using rotational field measuring device, or check phase sequence with an oscilloscope). If there is no right rotational field, exchange leads L1 and L2 at the supply module. Attention must be paid that mains auxiliary voltage connections L1 or L2 remain inphase with power connections L1, or L3 of supply module KDV, in accordance with the connection plan! – Mains voltage too low ➞ Measure mains voltage at connection terminals L1, L2, L3 of the supply module. ➞ Faulty transformer connection or fault in mains – Supply module defective ➞ Disconnect link circuit busbars and bus cable X1 between supply module and drive modules and repeat the above check. If there is no fault now, and the LED „power OK“ of the supply module is lit up, then the fault is in the connected drive module. ➞ Exchange supply module. • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 135 7. Fault-Finding and Diagnostics RF With fault green Controller release not applied to terminal RF With fault ➞ ➞ off flashes (1) Drive is interference free, but locked internally as there is no power voltage Possible fault causes and measures: LED flashing: see above under LED „power“/“PWR“ LED off: If message „power“ / „PWR“ lit up, then it should be possible to operate the drive after controller enable signal (3.30 volts) is input at terminal RF. Otherwise there is a fault in the drive. ➞ Measure voltage terminal RF Bb green With fault ➞ off The drive is not ready to operate. Bb contact of the drive module is open. With fault ➞ flashes (1) No power voltage, drive interference-free Possible fault causes and measures: – No power voltage ➞ see LED „power“/“PWR“ – Fault in drive ➞ see which LEDs display fault „plus/minus 15V, 24V“, „tacho“, „TS“, „BS“, „TÜ“. TS red With fault ➞ flashes (1) Temperature pre-warning, maximum equipment temperature exceeded. Drive to shut down in 30 seconds. With fault ➞ on Shutdown due to excessive equipment temperature. After fault has been recovered, press the black reset key on the front of the diagnostics display to re-start. Possible fault causes and measures: – Fan not working or air inlet or outlet obstructed. ➞ Check fan ➞ Check fan fuse – Inside temperature of control cabinet too high (ambient temperature) ➞ Improve control cabinet ventilation/cooling 136 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics – Load cycle of the drive too high ➞ Increase break times or reduce load – Wrong programming module MOD plugged in ➞ Check the data on the rating plate for agreement TÜ red With fault ➞ off Temperature pre-warning that equipment temperature has already been exceeded. The temperature monitoring opens (only in the KDS). The "open" collector output temperature monitoring (only in TDM3 and TDM4) switches to low-impedance 0 volts. Should the drive load not be sufficiently reduced within the next 30 seconds, then the drive package will be switched off. Possible fault causes and measures: see above under LED „TS“ BS red With fault ➞ on Shutdown due to (even short-term) overcurrent, short-circuit or ground leak (1) in the drive module, cable or motor. After fault has been recovered, press the black reset key on the front of the diagnostics display to re-start. Possible fault causes and measures: – Overcurrent when drive is run ➞ Hit reset key once, input speed set point to zero and turn drive on with signal at terminal RF: If fault does not occur again immediately, then there was an overcurrent during the run of the drive. In this case, check to see whether the motor and controller types listed on the rating plate of programming module MOD have actually been built-in. NOTE: In this case do not repeatedly hit the reset, as this might otherwise cause further damage to motor and drive modules. Fault should continue to be localized and all components tested first: – Short-circuit or ground leak in cable or connection ➞ Test connection and cable, exchange if necessary. – Short circuit or ground fault in motor ➞ Check the motor for a short-circuit or ground leak, exchange if necessary. Should the fault occur again after the reset has been hit, then – the drive module is defective ➞ exchange drive module • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 137 7. Fault-Finding and Diagnostics 7.4. General faults and possible remedial measures (1)=For add. measures, see respective Diagnostics Display in Chapter 7.3 No. Fault Message at Terminal Strip Diagnostics message in event of fault 1. Mains cannot be switched on. Terminal Bb1 open „24V/ ±15V“ off - Switch on mains auxiliary voltage/ controller voltage - Check mains connection - Check bus cable connecting equipment for short circuit - Check diagnostics „24V/ plus/minus 15V“ (1) „24V/ ±15V“ on - Fault in drive system Check diagnostics display (1) Terminal Bb1 closed „Power“ off („PWR“) „Power“ on („PWR“) Action to be taken No fault in drive system - Switch power on - Mains voltage lacking or faulty (1) - Check link circuit throttle connection - Check diagnostics display (1) Mains voltage on 2. Equipment fuses in supply unit blow blow: 24VL-fuse F2, mains auxiliary voltage connection, controller voltage connection fuses F3, F4 Terminal Bb1 open „24V/ ±15V“ off Fan fuses F5 on corresponding fan plate, F7, F8 on the front plate of the supply module (if present). Power fuse F1 in TVM 1, TVM 2 and KDV 1 Short-circuit or overload caused by attached fans. - Check the current load of the attached fans. - Locate defective fan or defective modular unit by removing the connecting cable and exchange, if necessary. „Power“ off („PWR“) „BS“ on (Drive module) 3. Fans not running Short-circuit or overload in power section or in the 24 VL outputs - Check 24 VL outputs at the supply module and at the connected drive modules. - Check 24VL current load from the connected drives. Is the supply module overloaded? - Remove bus X1 from the supply module. Should problem still occur, then exchange supply module (usually if F3, F4 defective). If problem no longer occurs, determine drive module with short circuit or overload at the 24VL, and exchange if defective. Short-circuit in power section - Separate link circuit busbars from supply module. - If problem continues, exchange supply module. If problem no longer occurs, determine drive with short-circuit by measuring resistance between L+ and L- (also check diagnostics light „BS“ (1)). - If the problem occurs while drives are operating, then the supply module is overloaded. - No mains auxiliary voltage at input terminals of supply modules (only with KDV2, KDV3 and KDV4). - No fan supply voltage - Fuses F7, F8 defective (only with KDV2, KDV3 and KDV4). - Check fuses on the fan plates of the corresponding fans. - Exchange fan or modular unit. - Fan rotor mechanically blocked. Figure 81: Summary of possible problems and actions to be taken. 138 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 7. Fault-Finding and Diagnostics Message at Terminal Strip No. Fault 4. Drive cannot be shut down and remains torque free 5. Drive active but not turning or cannot be moved. Diagnostics message in event of fault Action to be taken „Power“ off - Switch on mains voltage: (see Point 1 of this table) „Power“ on „RF“ off „RF“ on or flashing - Input set point - Input controller enable signal (1) - Eliminate break in motor or feedback line (1) - Motor mechanically blocked, eliminate blockage - Aereate motor brake, if drive blocked - Exchange servo drive module - Exchange motor (motor feedback defective) „RF“ off 6. Drive runs uncontrolled to positive speed after being switched on. - Input set point - Input controller enable signal (1) - Eliminate break in motor or feedback cable (1) - Motor mechanically blocked, eliminate blockage - Aereate motor brake, if drive blocked - Check load momentum - Exchange servo drive module - Motor feedback defective, exchange motor - Check whether speed set point equals zero. - Exchange speed set point polarity with feedback of position control loop. - Position control in NC defective. - Exchange feedback cable. - Exchange servo drive module. - Exchange motor. 7. Unwanted halting of drives during operation. - Check diagnostics display (1) (Problem in drive system) 8. Non-uniform turning of drives, non-uniform feed movement. - Check labelling of programming module MOD (wrong drive module or motor) - Check speed set point input value, adjust to NC output. - Check motor power connection (connections transposed, loose terminal point or a break in the cable) - Check motor feedback connection (connections transposed, loose terminal point or break in cable) - Check whether mains input at connection L1, L2, L3 of supply module is achieved using only two mains phases: * check fuses * check mains connection - Check interference suppression measures (see Chapter 5.5): * contactor and relay coils * cable shields - Aereate brakes if motor running against brakes. - Cut off mechanical coupling at motor shaft: * load moment of inertia too high? * coupling too soft? (e.g., bellows coupling) * slack in the coupling? * too much friction or is there jamming? - Optimize NC position control if Kv amplification too high. - Check NC set point Excessive harmonic vibrations on the NC set point: * reduce harmonic vibrations or * increase set point smoothing and new optimization of position control (smaller Kv amplification) - Check position analysis * position encoder defective? * mechanical slack beween position encoder and motor? - Exchange motor • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 139 8. Notes on Equipment Replacement 8. Notes on Equipment Replacement Time consuming searches for the faults within the individual units or the repair of the units within the machine are not acceptable because of the loss in production that these represent. The diagnostic displays and the fault signals at the controller interfaces of INDRAMAT’s AC Drives make a to-the-point and effective troubleshooting possible. Once a drive component such as the supply module, drive amplifier module, motor or cable is diagnosed as defective, it can be exchanged without any problem. This makes a speedy elimination of the problem and a resumption of operation without drawn out assembly and adjustment work possible. The factory-ready and optimized programming module MOD makes this adjustment-free exchange possible. The following should be noted when exchanging a component: – The new unit, motor or cable must have the exact same type designation on its rating plate as the one that is being replaced. – In the case of a servo drive module (generally not defective), programming module MOD should be removed from the defective unit and plugged into the replacement drive module. – The drift must be checked when exchanging the servo drive module, in accordance with Chapter 2.1, keyword „Drift Alignment“. – When returning a defective unit to Indramat Customer Service, the „Repair Card“, depicted on the next page, should accompany the return, after it has been filled out, to indicate all problems and faults which occurred. If no repair card is available, then just make a copy of the following page, fill it out, and return it with the defective part. A short description of the faults and problems which occurred should, in any case, accompany the return to guarantee a quick and effective repair. A repair card can be obtained from INDRAMAT. Customer service contacts: INDRAMAT GmbH Bgm.-Dr. Nebel-Str. 2 D-97816 Lohr am Main Technical service: Mr. Krasemann Tel. 09352/404496 Fax 09352/404440 Sales and organizational handling: Ms. Kissner Tel. 09352/404950 Fax 09352/404992 140 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 8. Notes on Equipment Replacement Repair Card for INDRAMAT Units and Unit Components Name: Company/Location: Unit or Part, Type: Mach. manuf./Co.: Type Problem in axis: horizontal vertical Date: Serial no.: SN: Del. cons. No.: SN: Del. date: Mach. no.: Date op. started: Duration of operation: Breakdown date: Additional notes: (e.g., LED diagnoses, fault message on display) Malfunction condition: Fault continuously present occurs sporadically occurs after approx. hrs. occurs with vibrations is temperature-dependent other Cause of fault: unknown connection error external short mechanical damage loose cable connection other Additional Notes General information: Accompanying affects: does not operate drives run smudgy uncontrolled drive movement fault in only one direction supply fuse blown other problem in mechanics mains section failure controller failure motor failure break in cable other Controller Motor does not operate display faulty no set-point output diagnosis position offset in direction Emergency off loop interrupted Position control loop does not close Fault in program sequence Int. auxilliary function faulty (outputs) acknowledgement messages not accepted (inputs) other Controller, Supply Unit, Amplifier, Mains Section: LED diagnosis controller voltage faulty mains section fuse F blew fan defective bleeder resistance def. power voltage faulty connecting bolt torn off other Comments: Thermocouple element defective brake defective fan defective feedback defective tacho signal faulty BLC signal faulty frame ground short thermal overload other Rep_Bglk.fh3 Figure 82: Repair Card • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 141 9. Summary of Diagnostic Displays on Modules 9. Summary of Diagnostic Displays on Modules Figure Diagnostic Display for Unit Type Serial no. Fig. 83 Fig. 84 TDM 1, TDM 2 TDM 1, TDM 2 from SN234... below SN233... Fig. 85 TDM 3, TDM 6 from SN240060-... —— Fig. 86 TDM 3, below SN240060-... Fig. 87 Fig. 88 TDM 4, TDM 7 TDM 4, from SN240062-... —— below SN240062-... Fig. 89 KDS 1 —— Fig. 90 TVM 1, TVM 2, KDV 1 —— Fig. 91 KDV 2 —— Fig. 92 KDV 3 —— Fig. 93 KDV 4 —— Fig. 94 TVD 1 —— Figure Servo drive module: Supply module: 142 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 9. Summary of Diagnostic Displays on Modules Diagnostic Display Servo Drive Modules TDM 1 and TDM 2 Equipment with serial numbers from SN 234... is equipped with expanded diagnostics Note: The messages are only then valid if "+24V, plus/minus15V" message emits constant green light. (1) Message and unit lock are being stored. Re-set by hitting re-set key or switching back on. Off Lightemitting diode green BLC 1 green BLC 2 BLC 3 green green Switched off because there was no controller voltage or temporary interference (1) Rotor position +24V, ±15V Flashing Cont. Light Controller voltage working Working: Working: Working: One or two light-emitting diodes out Each "BLC" LED flashes at low speed (n < 100 min-1) Motor standing still: One or two LEDs lit up. Malfunction: The flashing appears to be a constant light when speeds are higher. BLC 1, BLC 2, BLC 3 are simultaneously out. Faulty connection or fault in feedback cable Disconnect due to tacho or BLC malfunction, faulty connection or break in cable of the feedback cable or motor overspeed (1) Malfunction: BLC 1, BLC 2, BLC 3 simultaneously lit up with low speeds or stand still. Faulty connection or fault in feedback cable. Tacho and BLC Tacho green Power green Power voltage not switched on or disrupted. RF green No controller enable signal at terminal RF Unit internally locked because no power voltage and/or fault present Controller enable applied, drive active Unit locked because no power voltage and/or fault present (display via different LED) Drives trouble-free, no power voltage Drive ready-to-operate Bb green TS red Temperature within acceptable range Working BS Working Power voltage present Working Equipment temperature too high. Drive will shut down in 30 seconds. Current within acceptable range red Working Working Working Shutdown due to excessive equipment temperature (1) Shutdown due to overcurrent, short-circuit or ground leak in amplifier, cable or motor (1) DiagTDM1/2neu Figure 83: Diagnostics Display Servo Drive Modules TDM1 and TDM2 with Serial Numbers from SN 234 ... • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 143 9. Summary of Diagnostic Displays on Modules Diagnostic Displays Servo Drive Modules TDM 1, TDM 2 Equipment with serial numbers from SN 233... Note: The messages are only then valid if "+24V, plus/minus15V" message displays constant green light. (1) Message and unit lock are being stored. Re-set by hitting re-set keyor switching back on. Off Lightemitting diode green BLC 1 green BLC 2 BLC 3 green green Working Working: Working: Each "BLC" LED flashes at low speed (n < 100 min-1) Motor standing still: One or two LEDs lit up. Malfunction: The flashing appears to be a constant light at higher speed. BLC 1, BLC 2, BLC 3 are simultaneously out. Faulty connection or fault in feedback cable. Disconnected due to tacho malfunction, faulty connection or break in cable of the feedback cable or motor overspeed (1) green Power green Power voltage not switched on or disrupted. RF green No controller enable signal at terminal RF Bb TS red working One or two lightemitting diodes out. Tacho green Cont. Light Controller voltage Switched off as no controller voltage Rotor position +24V, ±15V Flashing Unit locked because no power voltage and/or fault present (display via different LED) Temperature within acceptable range Malfunction: BLC 1, BLC 2, BLC 3 simultaneously lit up with low speeds or stand still. Faulty connection or fault in feedback cable. Tacho and BLC working Power voltage present Working Controller enable applied Terminal RF on Working Drive ready to operate Working Shutdown due to excessive equipment temperature (1) Working BS Current within acceptable range red Working Shutdown due to overcurrent, short-circuit or ground leak in amplifier, cable or motor (1) DiagTDM1/2alt Figure 84: Diagnostics Display Servo Drive Modules TDM1and TDM2 with Serial Numbers from SN 233 ... 144 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 9. Summary of Diagnostic Displays on Modules Diagnostic Displays Servo Drive Modules TDM 3 and TDM 6 Equipment with serial numbers from SN 240 060 - XXXXX are equipped with expanded diagnostics. Note: The messages are only then valid if "+24V, plus/minus15V" message displays constant green light. (1) Message and unit lock are being stored. Re-set by hitting re-set key or switching back on. Off Lightemitting diode green BLC 1 green BLC 2 BLC 3 green green Switched off because there was no controller voltage or it was temporarily disrupted (1) Rotor position +24V, ±15V Working: Working: Motor standing still: One or two LEDs lit up. Malfunction: The flashing appears to be a constant light at higher speeds. BLC 1, BLC 2, BLC 3 are simultaneously out. Faulty connection or fault in feedback cable. Disconnected due to tachometer or BLC malfunction, faulty connection or break in cable of the feedback cable or motor overspeed (1) green Power voltage not switched on or discrupted. RF green No controller enable signal at terminal RF TS red Temperature within acceptable range Working Power voltage present Working Controller enable applied, but unit internally locked because no power voltage and/or malfunction present Controller enable applied, Drive active Working Drive problem free, no power voltage Drive ready-to-operate Equipment temperature too high. Drive will shut down in 30 seconds. Shutdown due to excessive equipment temperature (1) Current within acceptable range red Malfunction: BLC 1, BLC 2, BLC 3 simultaneously lit up with low speeds or stand still. Faulty connection or fault in feedback cable. Tacho and BLC Unit locked because fault present (display via different LED) Working BS working Each "BLC" LED flashes at low speed. (n < 100 min-1) PWR Bb Controller voltage Working: green green Cont. Light Motor standing still: One or two lightemitting diodes out Tacho (Power) Flashing Working Working Shutdown due to overcurrent, short-circuit or ground leak in amplifier, cable or motor (1) DiagTDM3neu/6 Figure 85: Diagnostics Display Servo Drive Module TDM3 with Serial Numbers from SN 240060-... and TDM6 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 145 9. Summary of Diagnostic Displays on Modules Diagnostic Displays Servo Drive Modules TDM 3 Equipment with serial numbers from SN 240 060-XXXXX Note: The messages are only then valid if "+24V, plus/minus15V" message displays constant green light. (1) Message and unit lock are being stored. Re-set by hitting re-set key or switching back on. Lightermitting diode green BLC 1 green BLC 2 BLC 3 green green Working: Working: Motor standing still: One or two LEDs lit up. Malfunction: The flashing appears to be a constant light at higher speeds. BLC 1, BLC 2, BLC 3 simultaneously lit up with low speeds or stand still. Faulty connection or fault in feedback cable. Malfunction: BLC 1, BLC 2, BLC 3 are simultaneously out. Faulty connection or fault in feedback cable. Disconnected due to tachometer or BLC malfunction, faulty connection or break in cable of the feedback cable or motor overspeed (1) green Power voltage not switched on or disrupted. RF green No controller enabler signal at terminal RF. TÜ red TS Unit locked because fault present (display via different LED). Current within acceptable range red red working Each "BLC" LED flashes at low speed (n < 100 min-1) POWER BS Controller voltage Working: green green Cont. Light Motor standing still: One or two light-emitting diodes out. Tacho Bb Flashing Switched off as no controller voltage Rotor position +24V, ±15V Off Working Temperature within acceptable range Tachometer and BLC Working Power voltage present Working Controller enabler applied Drive active Working Drive ready to operate Working Shutdown due to overcurrent or shortcircuit in amplifier, cable or motor (1) Working Equipment temperature too high. Drive to shutdown in 30 seconds. Working Shutdown due to excessive equipment temperature (1) DiagTDM3alt Figure 86: Diagnostics Display Servo Drive Module TDM3 with Serial Numbers below SN 240060-... 146 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 9. Summary of Diagnostic Displays on Modules Diagnostic Displays Servo Drive Modules TDM 4, TDM 7 Equipment with serial numbers from SN 240 062 - XXXXX are equipped with expanded diagnostics. Note: The messages are only then valid if "+24V, plus/minus15V" message displays constant green light. (1) Message and unit lock are being stored. Re-set by hitting re-set key or switching back on. Off Lightemitting diode green BLC 1 green BLC 2 BLC 3 green green Tacho green PWR green (Power) RF green Bb green TS red Switched off because there was no controller voltage or it was temporarily disrupted (1). Rotor position +24V, ±15V BS Cont. Light Controller voltage working Working: Working: Working: Motor standing still: One or two lightemitting diodes out. Each "BLC" LED blinks with low speed. (n < 100 min-1) Motor standing still: One or two LEDs lit up. Malfunction: The blinking appears to be a constant light at higher speeds. BLC 1, BLC 2, BLC 3 simultaneously lit up with low speeds or stand still. Faulty connection or fault in feedback cable. Malfunction: BLC 1, BLC 2, BLC 3 are simultaneously out. Faulty connection or fault in feedback cable. Disconnected due to tacho or BLC malfunction, or motor overspeed (1) Tacho and BLC Working Power voltage present Power voltage not switched on or disrupted. Working No controller enable signal at terminal RF Controller enable applied, but unit internally locked because no power voltage and/or fault present. Unit locked because fault present (display via different LED). Drive fault free, no power voltage. Temperature within acceptable range Working Current within acceptable range red Flashing Working Temperature too high. Drive will shutdown in 30 seconds. Controller enable applied Drive active Working Drive ready-to-operate Working Shutdown due to excessive equipment temperature (1) Shutdown due to overcurrent, short-circuit or ground leak in amplifier, cable or motor (1) DiagTDM4neu/7 Figure 87: Diagnostics Display Servo Drive Modules TDM4 with Serial Numbers from SN 240062-... and TDM7 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 147 9. Summary of Diagnostic Displays on Modules Diagnostic Displays Servo Drive Modules TDM 4 Equipment with serial numbers from SN 240 062-XXXXX Note: The messages are only then valid if "+24V, plus/minus15V" message displays constant green light. (1) Message and unit lock are being stored. Re-set by hitting re-set key or switching back on. Lightermitting diode green BLC 1 green BLC 2 BLC 3 green green Working: Working: Motor standing still: One or two LEDs lit up. Malfunction: The flashing appears to be a constant light at higher speeds. BLC 1, BLC 2, BLC 3 simultaneously lit up with low speeds or stand still. Faulty connection or fault in feedback cable. Malfunction: BLC 1, BLC 2, BLC 3 are simultaneously out. Faulty connection or fault in feedback cable. Disconnect due to tacho or BLC malfunction, or motor overspeed (1) green Power voltage not switched on or disrupted. RF green No controller enable signal at terminal RF Unit locked because fault present (display via different LED) Current within acceptable range BS red Working TÜ red Temperature within acceptable range red Working Each "BLC" LED flashes at low speed. (n < 100 min-1) POWER TS Controller voltage Working: green green Cont. Light Motor standing still: One or two light-ermitting diodes out. Tacho Bb Flashing Switched off as no controller voltage Rotor position +24V, ±15V Off Tacho and BLC Working Power voltage present Working Controller enable applied Drive active Working Drive ready-to-operate Working Shutdown due to overcurrent, or short-circuit in amplifier, cable or motor (1) Working Equipment temperature too high. Unit will shutdown in 30 seconds. Working Shutdown due to excessive equipment temperature (1) DiagTDM4alt Figure 88: Diagnostics Display Servo Drive Module TDM4 with Serial Numbers below SN 240062-... 148 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 9. Summary of Diagnostic Displays on Modules Diagnostic Displays Servo Drive Modules KDS 1 Note: The messages are only then valid if "+24V, plus/minus15V" message displays constant green light. (1) Message and unit lock are being stored. Re-set by hitting re-set key or switching back on. Lightermitting diode +24V, ±15V BLC 2 BLC 3 green green Cont. Light Controller voltage green Working: Working: Working: Each "BLC" LED flashes at low speed (n < 100 min-1) Motor standing still: One or two LEDs lit up. Malfunction: The flashing appears to be a constant light at higher speeds. BLC 1, BLC 2, BLC 3 simultaneously lit up with low speeds or stand still. Faulty connection or fault in feedback cable. Malfunction: BLC 1, BLC 2, BLC 3 are simultaneously out. Faulty connction or fault in feedback cable. Disconnect due to tacho malfunction, faulty connection or cable disruption of the feedback cable or motor overspeed (1) green POWER green Power voltage not switched on or disrupted. RF green No controller release signal at terminal RF. green Working Motor standing still: One or two light-emitting diodes out. Tacho Bb Flashing Switched off as no controller voltage green Rotor position BLC 1 Off Unit locked because fault present (display via different LED). Tacho and BLC Working Power voltage present Working Controller enable applied Drive active Working Drive ready-to-operate Working BS red Working Shutdown due to overcurrent, or short-circuit in amplifier, cable or motor (1) TS red Working Shutdown due to excessive equipment temperature (1) TÜ red Temperature within acceptable range Current within acceptable range Working Equipment temperature too high. Drive will shutdown in 30 seconds. DiagKDS1 Figure 89: Diagnostics Display Servo Drive Module KDS1 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 149 9. Summary of Diagnostic Displays on Modules Diagnostic Displays Suply Modules TVM 1, TVM 2, KDV 1 Note: The messages are only valid if the "+24V, plus/minus15V"constantly lit up. (1) Message and equipment lock are stored. Re-set by pressing re-set key or switching back on. Off Light-emitting diodes H3 Überspannung OVERVOLTAGE red H4 Leistung Ein POWER ON green Deceleration capabilities of drive within permissible range Working Cont. light Power off due to excessive deceleration energy, excessive mains voltage or defective drive module (1) Power voltage Power not switched on or disrupted Working DiagTVM1/2KDV1 Figure 90: Diagnostics Display for Supply Modules TVM1, TVM2 and KDV1 Diagnostics Display for Supply Module KDV 2 Note: The messages are only valid if the "+24V, plus/minus15V" message is constantly lit up. (1) Message and equipment lock are stored. Re-set by pressing re-set key or switching back on. Light-emitting diodes Bleeder Überlast BLEEDER OVERLOAD red Off Deceleration capabilities of drive within permissible range Working No ground leak Erdschluß EARTH CON. red Hilfsspannung AUX. VOLT green Leistung o.k. POWER o.k. green Working No mains auxiliary voltage at terminals L1 ... L3 Cont. light Power off due to excessive deceleration energy or fault in supply module (1) Power off due to ground leak in supply module, in drive module, in cable or in motor (1) Mains auxiliary voltage Power not switched on or disrupted Working Power voltage Working DiagKDV2 Figure 91: Diagnostics Display for Supply Module KDV2 150 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 9. Summary of Diagnostic Displays on Modules Diagnostic Displays for Supply Module KDV 3 Note: The messages are only valid if the "+24V, plus/minus15V" message is constantly lit up. (1) Message and equipment lock are stored. Re-set by pressing re-set key or switching back on. Light-emitting diodes Off +24V/±15V green Power off due to faulty controller voltage Hilfsspannung AUX. VOLT green No mains auxiliary voltage at terminals L1 ... L3 Leistung o.k. POWER o.k. green Power not on or disrupted. Überstrom OVERCURRENT red Erdschluß EARTH CON. red Übertemperatur TEMP. FAULT red Bleeder Überlast BLEEDER OVERLOAD red Cont. light Controller voltage Working Mains auxiliary voltage Working Power voltage Working Current in power section within permissible range Working No ground leak Working Equipment temperature Working Deceleration capabilities of drive within permissible range Working Power off due to overcurrent, short circuit in supply module, in drive module, in cable or in motor (1) Power off due to ground leak in supply module, in drive module, in cable or in motor (1) Power off as unit temperature too high (1) Power off due to excessive deceleration energy or fault in supply module (1) DiagKDV3 Figure 92: Diagnostics Display for Supply Module KDV3 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 151 9. Summary of Diagnostic Displays on Modules Diagnostics Display on Supply Module KDV 4 Note: The messages are only valid if the "+24V, plus/minus15V" message is constantly lit up. (1) Message and equipment locked are stored. Re-set by pressing re-set key or switching back on. Light-emitting diodes H1 Hilfsspannung AUX. VOLT green H2 +24V/±15V green Off No mains auxiliary voltage at terminals L1 ... L3 Power off due to faulty controller voltage H3 Netzüberwachung green MAINS FAULT mains malfunction: Phase missing, no right rotational field or mains voltage too low H4 Leistung o.k. POWER o.k. Power not switched on or disrupted green Bleeder Überlast H5 BLEEDER OVERLOAD red Working Equipment temperature H6 KK-Übertemperatur TEMP. FAULT H7 Überstrom OVERCURRENT H8 Erdschluß EARTH CON. Deceleration capabilities within permissible range Working red Current within power section within permissible range Working No ground leak red Cont. light Mains auxiliary voltage Working Controller voltage Working Mains Working Power voltage Working Power off due to excessive braking energy or fault in supply module (1) Power off as equipment temperature to high (1) Power off due to overcurrent, short circuit in supply module, in drive module, in cable or in motor (1) Power off due ground leak in supply or drive module, cable or motor (1) Working DiagKDV4 Figure 93: Diagnostics Displays on Supply Module KDV4 152 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 9. Summary of Diagnostic Displays on Modules Diagnostics Display on Supply Module TVD 1 Note: The messages are only valid if the "+24V, plus/minus15V" message is constantly lit up. (1) Message and equipment locked are stored. Re-set by pressing re-set key or switching back on. Off Light-emitting diodes H1B +24V/±15V green H2B Bb1 green Flashing Power voltage Signal voltage disrupted CLOSED geschl. H3B MAINS green Netzspg. OK H4B POWER green Leistung OK Cont. light Working Supply module and drives are fault-free Malfunction in supply module or in drive (1) No mains connection, Phase missing or mains voltage to low Mains connection Working Mains contactor not switched on or disrupted, or rectifier disrupted. Link circuit voltage Working H1A OVERCURRENT red Überstrom Current in power section within permissible range Power on with existing short circuit in TVD, in drive module, in cable or in motor [5] Power off due to overcurrent short circuit in TVD, drive module, cable or motor (1) H2A OVERL. red BLEEDER Überl. Deceleration capabilities within permissible range. Deceleration capabilities of the drives may not be increased Power off due to excessive deceleration energy (1) H3A TEMP. FAULT red KK-Übertemp. Equipment temperature within permissible range. Equipment temperature too high; power off within 30 seconds Power off due to excessive equipment temperature (1) H4A OVERVOLTFUSE red Übersp.sich. Voltage in power section has not exceeded its maximum value Overvoltage fuse blown DiagTVD1 Figure 94: Diagnostics Display on Supply Module TVD 1 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 153 10. Summary of Data 10. Summary of Data 10.1. Important Motor Data MOTOR MAC Rated speed Tacho constants Torque constants Continuous torque not ventilated ventilated (1) nmax -1 min Cw -1 V/1000min Continuous current Motor moment not ventilated ventilated ot inertia (2) (3) (3) Km M(dN) M(dN) I(dN) I(dN) Nm/A Nm Nm A A 0.00 0.00 0.79 1.60 0.00 0.00 J 2 021A-0-YS 021B-0-WS 10000 10000 0.75 0.75 0.190 0.190 0.15 0.3 025A-0-WS 025B-0-ZS 025C-0-QS 10000 10000 10000 0.75 0.75 0.75 0.220 0.220 0.230 0.33(0.27) 0.60(0.51) 0.90(0.75) 1.54(1.26) 2.80(2.38) 4.00(3.40) 0.23 0.32 0.41 041A-0-FS 041B-0-BS 041C-0-TS 041A-0-IS 041B-0-QS 041C-0-LS 6000 6000 6000 10000 10000 10000 0.75 0.75 0.75 0.75 0.75 0.75 0.330 0.310 0.330 0.200 0.190 0.200 0.64(0.59) 1.35(1.26) 2.05(1.93) 0.64(0.59) 1.35(1.26) 2.05(1.93) 2.00(1.80) 4.40(4.10) 6.30(5.90) 3.30(3.00) 7.30(6.80) 10.50(9.90) 0.70 1.30 1.90 0.70 1.30 1.90 063A-.-RS 063B-.-JS 063C-.-HS 063D-.-FS 063A-.-ES 063B-.-GS 063C-.-MS 063D-.-JS 6000 6000 6000 6000 3500 3500 3500 3500 1.50 1.50 1.50 1.50 1.50 1.50 1.50 1.50 0.230 0.260 0.310 0.320 0.370 0.420 0.510 0.530 0.80 1.50 2.10 2.70 0.80 1.50 2.10 2.70 1.00 1.70 2.70 3.50 1.00 1.70 2.70 3.50 3.50 5.80 6.80 8.40 2.20 3.60 4.10 5.10 4.40 6.60 8.70 11.00 2.70 4.00 5.30 6.60 2.40 3.20 4.00 4.80 2.40 3.20 4.00 4.80 071A-.-HS 071B-.-FS 071C-.-US 071A-.-OS 071B-.-TS 071C-.-NS 071A-.-ES 071B-.-PS 071C-.-JS 071A-.-VS 071B-.-KS 071C-.-GS 2000 2000 2000 3000 3000 3000 4000 4000 4000 6000 6000 6000 3.0 3.0 3.0 3.0 3.0 3.0 1.50 1.50 1.50 1.50 1.50 1.50 0.860 0.880 0.900 0.580 0.600 0.600 0.440 0.460 0.430 0.300 0.310 0.300 2.20 4.40 6.60 2.20 4.40 6.60 2.20 4.40 6.60 2.20 4.40 6.60 3.30 6.60 9.90 3.30 6.60 9.90 3.30 6.60 9.90 3.30 6.60 9.90 2.60 5.00 7.30 3.80 7.30 11.0 5.00 9.60 15.3 7.30 14.20 22.00 4.10 7.90 11.8 6.00 11.7 17.7 7.90 15.3 24.8 11.70 22.30 35.40 5.40 9.90 12.90 5.40 9.90 12.90 5.40 9.90 12.90 5.40 9.90 12.90 090A-.-ZD 090B-.-PD 090C-.-KD 090A-.-RD 090B-.-ND 090B-.-JD 090C-.-GD 090C-.-ED 2000 2000 2000 3000 3000 3000 3000 5000 3.0 3.0 3.0 3.0 3.0 3.0 3.0 1.5 0.510 0.670 0.680 0.340 0.580 0.410 0.430 0.310 3.70 7.20 10.40 3.50 6.70 6.70 9.60 10.00 5.00 10.50 16.00 5.00 10.50 10.50 16.00 16.00 8.10 11.90 17.00 11.40 13.00 18.20 24.80 35.00 10.90 17.40 26.10 16.30 20.00 28.50 41.30 52.00 20.00 36.00 53.00 20.00 36.00 36.00 53.00 53.00 154 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 -4 kgm x10 0.22 0.31 10. Summary of Data MOTOR MAC Rated speed Tacho constants Torque constants Continuous torque not ventilated ventilated (1) nmax -1 min Continuous current Motor moment not ventilated ventilated of inertia (2) Cw V/1000min -1 Km M(dN) M(dN) I(dN) I(dN) Nm/A Nm Nm A A J 2 -4 kgm x10 092A-0-DD 092B-0-QD 4000 4000 1.5 1.5 0.240 0.280 1.50 3.00 0.00 0.00 6.90 11.90 0.00 0.00 8.70 16.00 093A-.-WS 093B-.-OS 093C-.-KS 093A-.-PS 093B-.-JS 093C-.-FS 093A-.-LS 093B-.-GS 093C-.-DS 093A-.-HS 093B-.-ES 093C-.-CS 2000 2000 2000 3000 3000 3000 4000 4000 4000 6000 6000 6000 3.0 3.0 3.0 3.0 3.0 3.0 1.5 1.5 1.5 1.5 1.5 1.5 0.875 0.831 0.910 0.620 0.554 0.579 0.438 0.388 0.413 0.292 0.277 0.331 9.20 14.50 19.50 9.20 14.50 19.50 9.20 14.50 19.50 9.20 14.50 19.50 12.00 20.00 28.00 12.00 18.30 28.00 12.00 20.00 28.00 9.80 20.00 28.00 11.00 18.00 22.00 15.00 27.00 35.00 22.00 38.00 48.00 32.00 54.00 60.00 14.00 25.00 32.00 20.00 34.00 50.00 28.00 53.00 69.00 34.00 74.00 87.00 22.00 29.00 42.00 22.00 29.00 42.00 22.00 29.00 42.00 22.00 29.00 42.00 095A-0-VS 095B-0-AS 095C-0-RS 3000 3000 3000 3.0 3.0 3.0 0.550 0.500 0.504 2.40 4.50 6.70 0.00 0.00 0.00 4.50 9.20 13.60 0.00 0.00 0.00 8.70 13.60 17.00 112A-.-ZD 112B-.-PD 112C-.-KD 112D-.-HD 112A-.-VD 112B-.-LD 112C-.-HD 112D-.-FD 112A-.-LD 112B-.-GD 112C-.-ED 112D-.-ED 112C-0-CD 1500 1500 1500 1500 2000 2000 2000 2000 3000 3000 3000 3000 5000 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 1.5 0.820 0.910 1.000 1.010 0.630 0.740 0.730 0.760 0.350 0.430 0.470 0.620 0.330 10.70 18.20 28.00 38.00 10.50 17.50 27.00 38.00 9.80 16.00 24.00 35.00 27.00 13.00 29.00 44.00 57.00 13.00 29.00 44.00 57.00 13.00 29.00 44.00 57.00 0.00 14.50 21.00 31.00 42.00 18.50 26.30 41.00 56.00 31.00 41.00 57.00 63.00 91.00 17.20 33.00 49.00 63.00 22.90 43.50 67.00 83.00 41.30 75.00 104.00 102.00 0.00 61.00 120.00 170.00 230.00 61.00 120.00 170.00 230.00 61.00 120.00 170.00 230.00 17.00 114A-0-ED 114B-0-SD 114C-0-MD 114E-0-ND 3000 3000 3000 3000 3.0 3.0 3.0 3.0 0.400 0.550 0.580 0.550 4.20 9.00 13.00 24.00 0.00 0.00 0.00 0.00 11.70 18.20 24.90 48.50 0.00 0.00 0.00 0.00 35.00 61.00 87.00 120.00 115A-.-HS 115B-.-GS 115C-.-ES 115D-.-DS 115A-.-FS 115B-0-DS 115C-0-CS 115D-0-CS 2000 2000 2000 2000 3000 3000 3000 3000 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 0.882 0.952 0.880 0.864 0.588 0.544 0.528 0.648 28.00 38.00 47.00 57.00 28.00 38.00 47.00 57.00 42.00 61.00 75.00 88.00 42.00 0.00 0.00 0.00 32.50 40.90 55.00 68.00 48.80 72.00 91.00 90.00 48.80 66.00 87.00 104.00 73.20 0.00 0.00 0.00 123.00 172.00 222.00 271.00 123.00 172.00 222.00 271.00 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 155 10. Summary of Data MOTOR MAC Rated speed Tacho constants Torque constants Continuous torque Continuous current not ventilated ventilated (1) nmax -1 min Motor moment not ventilated ventilated of inertia (2) Cw -1 V/1000min Km M(dN) M(dN) I(dN) I(dN) Nm/A Nm Nm A A J 2 -4 kgm x10 117A-0-PS 117A-0-BS 117A-0-TS 117B-0-WS 117B-0-OS 117B-0-KS 117C-0-QS 117C-0-KS 117C-0-HS 117D-0-MS 117D-0-HS 117D-0-FS 117E-0-JS 117E-0-GS 117E-0-ES 117C-0-ES 2000 3000 4000 2000 3000 4000 2000 3000 4000 2000 3000 4000 2000 3000 4000 6000 3.0 3.0 1.5 3.0 3.0 1.5 3.0 3.0 1.5 3.0 3.0 1.5 3.0 3.0 1.5 1.5 0.775 0.517 0.351 0.849 0.554 0.406 0.886 0.609 0.443 0.887 0.591 0.443 0.922 0.646 0.461 0.277 6.50 6.50 6.50 12.50 12.50 12.50 18.00 18.00 18.00 23.00 23.00 23.00 28.00 28.00 28.00 18.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 8.60 12.90 19.00 15.10 23.10 31.60 21.00 30.00 41.70 27.00 40.00 53.20 31.10 44.40 62.20 67.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 30.00 30.00 30.00 54.00 54.00 54.00 78.00 78.00 78.00 102.00 102.00 102.00 126.00 126.00 126.00 78.00 132B-1-ID 1000 3.0 1.293 58.00 82.00 45.00 63.60 140.00 160C-0-ED 160D-0-ED 160E-0-ED 2000 1500 1200 3.0 3.0 3.0 1.010 1.360 1.750 64.00 84.00 104.00 0.00 0.00 0.00 70.00 69.00 66.00 0.00 0.00 0.00 850.00 1150.0 1450.0 (1) The motor speed which can be implemented is dependent upon the servo drive and supply modules used. (2) (2) For the precise calculation of the torque, the torque constant for motors MAC 071, MAC 095, MAC 095, MAC 115 and MAC 117 should be multiplied by the reduction factor RF, in accorrdance with the figure below. (3) The values indicated in parentheses apply to motors with integrated brakes. RF 1,0 (1/1) 0,9 0,8 (4/0,72) 0,7 1 2 3 4 I/I(dN)Current ratio Figure 95: Summary of important data for MAC motors (additional motor data can be found in the description „Application Data MAC XXX“). 156 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 0.250 0.150 0.075 0.075 0.250 0.375 0.250 0.375 0.250 0.500 0.250 0.500 0.250 0.250 0.150 0.075 0.050 TDM 1.2-030-300/ SO 100 TDM 1.2-050-300/ SO 100 TDM 1.2-100-300/ SO 100 TDM 2.1-015-300 TDM 2.1-030-300 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 TDM 3.2-020-300 TDM 3.2-030-300 TDM 4.1-020-300 TDM 4.1-030-300 TDM 6.1-015-300 TDM 6.1-030-300 TDM 7.1-015-300 TDM 7.1-030-300 KDS 1.1-030-300 KDS 1.1-050-300 KDS 1.1-100-300 KDS 1.1-150-300 - 0.500 0.250 0.500 0.250 0.375 0.250 0.375 0.250 - - - - V/ A V/ A 0.050 0.050 0.050 Iist kMA 1.3 2 4 6 1 1.3 1 1.3 1 1.3 1 1.3 1.5 3 3 5 10 15 15 15 A Imin Current set-point Current actual value Minumum Terminal MA Terminal lactual, adjustable current Ired TDM 1.2-030-300 TDM 1.2-050-300 TDM 1.2-100-300 Servo drive module for unit type MOD 3 „ „ „ MOD 21 " MOD 19 " MOD 17 „ MOD 13 „ MOD 5 „ „ „ „ MOD 1 „ „ MOD 4 „ „ „ MOD 22 " MOD 20 " MOD 18 „ MOD 14 „ MOD 6 „ „ „ „ MOD 2 „ „ Corresponding Programming Module MOD Without setpoint With set-point potentiometer potentiometer compensation compensation 10. Summary of Data 10.2. Important Data on the Servo Drive Module Figure 96: Summary of important data on the servo drive module (additional data outlined in the data sheets in Chapter 12). 157 11. Equipment fuses for individual modular units 11. Equipment fuses for individual modular units The fuse types are listed on the front plates with the exception of the fan fuses which are listed on the fan plate located on the under side of the modular units. (1) Microfuse size 5 X 20 mm Module type Symbol Fuse type Designation Suply module: TVM...-220/380 F1 Power section fuse F2 F3 F4 F5 TVM...-115/220 F1 F2 F3 F4 F5 KDV 1...-220 F1 F2 F3 F4 F5 KDV1...-115 F1 Siemens Neozed 25A/380V M10A/250E M6.3A/250E M6.3A/250E 0.315A/250E Siemens Neozed 25A/380V M10A/250E M10A/250E M10A/250E 0.630A/250E Siemens Neozed 100A/380V M10A/250E M6.3A/250E M6.3A/250E 0.630A/250E 24V controller voltage supply Module’s inherent supply „ Internal fan 220 V (only in TVM ...-W1-...) Power section fuse 24V controller voltage supply Module’s inherent supply „ Internal fan 115 V (only in TVM ...-W1-...) Power section fuse 24V controller voltage supply Module’s inherent supply „ Internal fan 220 V (only in KDV...-W1-...) F2 F3 F4 F5 Siemens Neozed 25A/380V M10A/250E M10A/250E M10A/250E 1.25A/250E Power section fuse 24V controller voltage supply Module’s inherent supply „ Internal fan 115 V (only in KDV...-W1-...) TBM.../220 F5 0.315A/250E Internal fan 220 V TBM.../115 F5 0.630A/250E Internal fan 115 V KDV 2, KDV 3, F2 F3 F4 F7 F8 M2A/250E T10A/250E T10A/250E T10A/250E T10A/250E 24V controller voltage supply Module’s inherent supply „ Internal fan 220 V „ TVD none External fan for cold-running technology: LE...-220 F6 0.630A/250E Externally mounted fan LE...-115 F6 1.25A/250E Externally mounted fan Servo drive module: TDM...-W1-220 F5 0.315A/250E Internal fan 220 V (only in TDM...-W1-...) TDM...-W1-115 F5 0.630A/250E Internal fan 115 V (only in TDM...-W1-...) KDS...-W1-220 F5 0.630A/250E Internal fan 220 V (only in KDS...-W1-...) KDS...-W1-115 F5 1.25A/250E Internal fan 115 V (only in KDS...-W1-...) External fan for cold-running technology: LE...-220 F6 0.630A/250E Externally mounted fan LE...-115 Externally mounted fan F6 1.25A/250E Figure 97: Fuses for individual modular units 158 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12. Technical Data of the Servo Drive Modules 12. Technical Data of the Servo Drive Modules Cooling natural convection TDM1.2-100-300-W1 Symbol Unit TDM1.2-050-300-W1 Designation TDM1.2-030-300-W1 Values in [ ] apply to new modules with serial numbers starting from SN 234 ... TDM1.2-030-300-W0 Technical Data TDM1 forced ventilation Current I(type) (A) 30 30 50 100 Peak current I(peak) (A) 30 30 50 100 Continuous current I(cont) (A) 25 30 45 65 Link circuit d.c. voltage U(DC) (V) Power P(cont) Power loss with I(cont) Weight 300 (± 15%) (kW) 9 9 15 30 P(v) (W) 160 190 250 400 m (kg) 9 10 10 10,5 750 [250] 750 [350] Current consumption of signal processing (without external load) + 24V Load voltage I(+UL) (mA) + 15V Measuring voltage I(+UM) (mA) 140 - 15V Measuring voltage I(-UM) (mA) 60 + 15V Measuring voltage I(+UM) (mA) 15 - 15V Measuring voltage I(-UM) (mA) 15 950 [350] 1450 [400] Current capacitance of the voltages at terminal X5 for external consumption Unit fan connection Supply voltage U (V) 220 or 115 Frequency f (Hz) 50 … 60 Hz Power consumption P (VA) without 30 Operating conditions permissible ambient temperature range with rated data (°Centigrade) +5 … +45 maximum permissible ambient temperature with reduced rated data (°Centigrade) 55 Storage and transport temperatures (°Centigrade) -30 … +85 Mounting altitude without reduction of rated data Permissible humidity acc. to humidity classification Insulation category Type of protection max. 1000m above NN F in acc. with DIN 40 040 C in acc. with DIN VDE 0110 IP 10 acc. to DIN 40 050 Figure 98: Technical Data of Servo Drive Module TDM1 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 159 12. Technical Data of the Servo Drive Modules Symbol Unit Type of cooling TDM2.1-030-300-W1 Designation TDM2.1-030-300-W0 Values in [ ] apply to new modules with serial numbers starting from SN 234 … TDM2.1-015-300-W0 Technical Data TDM 2 natural convection forced ventilation Current I(type) (A) 15 30 30 Peak current I(peak) (A) 15 30 30 Continuous current I(cont) (A) 15 25 30 Link circuit d.c. voltage U(DC) (V) Power P(cont) Power loss with I(cont) Weight 300 (± 15%) (kW) 4,5 9 9 P(v) (W) 110 160 190 m (kg) 9 10 Current consumption of signal processing (without external load) + 24V Load voltage I(+UL) (mA) 750 [350] + 15V Measuring voltage I(+UM) (mA) 140 - 15V Measuring voltage I(-UM) (mA) 60 + 15V Measuring voltage I(+UM) (mA) 15 - 15V Measuring voltage I(-UM) (mA) 15 Current capacitance of the voltages at terminal X5 for external consumption Fan connection Supply voltage U (V) 220 or 115 Frequency f (Hz) 50 - 60 Hz Power consumption P (VA) without 30 Operating conditions permissible ambient temperature range with rated data (°Celsius) +5 ... +45 maximum permissible ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Mounting altitude without reduction of rated data Permissible humidity acc. to humidity classification max. 1000m above NN F in acc. with DIN 40 040 Insulation category C in acc. with DIN VDE 0110 Type of protection IP 10 acc. to DIN 40 050 Figure 99: Technical Data of Servo Drive Module TDM2 160 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12. Technical Data of the Servo Drive Modules Technical Data TDM 3 Designation Symbol Unit TDM3.2-030-300-W11) TDM3.2-020-300-W0 Type of cooling natural convection forced ventilation Power section Current I(type) (A) 20 30 Peak current I(peak) (A) 20 30 Continuous current I(cont) (A) 15 25 Link circuit d.c. voltage U(DC) (V) Power P(cont) Power loss with I(cont) Weight 300 (± 15%) 300 (± 15%) (kW) 6 9 P(v) (W) 110 175 m (kg) 8 8 (mA) 400 8002) Current consumption of signal processing (without external load) + 24V Load voltage I(+UL) + 15V Measuring voltage I(+UM) (mA) 120 125 - 15V Measuring voltage I(-UM) (mA) 50 55 + 24V Load voltage I(+UL) (mA) 50 + 15V Measuring voltage I(+UM) (mA) 15 - 15V Measuring voltage I(-UM) (mA) 15 Current capacitance of the voltages at terminal X43 for external consumption Operating conditions permissible ambient temperature range with rated data (°Celsius) +5 ... +45 maximum permissible ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Mounting altitude without reduction of rated data max. 1000m above NN Permissible humidity acc. to humidity classification F in acc. with DIN 40 040 Insulation category C in acc. with DIN VDE 0110 Type of protection IP 10 acc. to DIN 40 050 1) Servo drive module TDM 3.2-030-300-W1 can only be operated with one fan unit. 2) Current consumption equals 800 mA when the 24V direct current fan unit LE5-024 is connected to the +24V of the servo drive module. Current consumption is reduced to 650 mA, if fan units LE5-220 or LE5-115 are used. Technical Data: fan unit for forced ventilation in TDM 3.2-030-300-W1 Obsolete modules Designation Symbol Supply voltage U Frequency f Power consumption P Weight m Unit LE5-024-.. LE5-220-.. LE-115-.. (V) DC24(-10%/+20%) AC220(±10%) AC115(±10%) (Hz) - 50 ... 60 50 ... 60 3,6 W 20 VA 20VA 1 1,17 1,17 (kg) Figure 100: Technical Data of Servo Drive Module TDM 3 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 161 12. Technical Data of the Servo Drive Modules Technical Data TDM 4 Designation Symbol Unit TDM4.1-030-300-W11) TDM4.1-020-300-W0 Type of cooling natural convection forced ventilation Power section Current I(type) (A) 20 30 Peak current I(peak) (A) 20 30 Continuous current I(cont) (A) 15 25 Link circuit d.c. voltage U(DC) (V) Type power P(cont) Power loss with I(cont) Weight 300 (± 15%) 300 (± 15%) (kW) 6 9 P(v) (W) 110 175 m (kg) 8 8 (mA) 400 8002) Current consumption of signal processing (without external load) + 24V Load voltage I(+UL) + 15V Measuring voltage I(+UM) (mA) 150 150 - 15V Measuring voltage I(-UM) (mA) 60 60 + 24V Load voltage I(+UL) (mA) 50 + 15V Measuring voltage I(+UM) (mA) 15 - 15V Measuring voltage I(-UM) (mA) 15 Current capacitance of the voltages at terminal X43 for external consumption Operating conditions permissible ambient temperature range with rated data (°Celsius) +5 ... +45 maximum permissible ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Mounting altitude without reduction of rated data max. 1000m above NN Permissible humidity acc. to humidity classification F in acc. with DIN 40 040 Insulation category C in acc. with DIN VDE 0110 Type of protection IP 10 acc. to DIN 40 050 1) Servo drive module TDM 4.1-030-300-W1 can only be operated with a fan unit. 2) Current consumption is 800 mA when the 24V direct current fan unit LE5-024 is connected to the +24V of the servo drive module. Current consumption is reduced to 650 mA, if fan units LE5-220 or LE5-115 are used. Technical data: fan unit for forced ventilation in TDM 4.1-030-300-W1 Obsolete modules Designation Symbol Unit LE5-024-.. LE5-220-.. LE-115-.. Supply voltage U (V) DC24(-10%/+20%) AC220(±10%) AC115(±10%) Frequency f (Hz) - 50 ... 60 50 ... 60 3,6 W 20 VA 20VA 1 1,17 1,17 Power consumption P Weight m (kg) Figure 101: Technical Data of Servo Drive Module TDM 4 162 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12. Technical Data of the Servo Drive Modules Technical Data TDM 6 Designation Symbol Unit TDM6.1-030-300-W11) TDM6.1-015-300-W0 Type of cooling natural convection forced ventilation Power section Current I(type) (A) 15 30 Peak current I(peak) (A) 15 30 Continuous current I(cont) (A) 8 12 (V) 300 (± 10%) 300 (± 10%) 4,5 9 Link circuit d.c. voltage U(DC) Power P(cont) Power loss with I(cont) P(v) (W) 90 135 Weight m (kg) 6,5 6,5 (kW) Current consumption of signal processing (without external load) + 24V Load voltage I(+UL) (mA) 250 250 + 15V Measuring voltage I(+UM) (mA) 150 150 - 15V Measuring voltage I(-UM) (mA) 75 75 I(+UL) (mA) Current capacitance of the voltages at terminal X43 for external consumption + 24V Load voltage 50 + 15V Measuring voltage I(+UM) (mA) 15 - 15V Measuring voltage I(-UM) (mA) 15 Operating conditions Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Maximum permissible ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Mounting height without reduction of rated data max. 1000m above NN Permissible humidity acc. to humidity classification F in acc. with DIN 40 040 Insulation category C in acc. with DIN VDE 0110 Type of protection IP 10 acc. to DIN 40 050 1) Servo drive module TDM 6.1-030-300-W1 can only be operated with one fan unit. 2) Current consumption is 800 mA when the 24V direct current fan unit LE5-024 is connected to the +24V of the servo drive module. Current consumption is reduced to 650 mA, if fan units LE5-220 or LE5-115 are used. Technical data: fan unit for forced ventilation in TDM 6.1-030-300-W1 Obsolete modules Designation Symbol Unit Supply voltage U (V) Frequency f (Hz) Power consumption P Weight m (kg) LE5-024-.. LE5-220-.. LE-115-.. DC24(-10%/+20%) AC220(±10%) AC115(±10%) - 50 ... 60 50 ... 60 3,6 W 20 VA 20VA 1 1,17 1,17 Figure 102: Technical Data of Servo Drive Module TDM 6 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 163 12. Technical Data of the Servo Drive Modules Technical Data TDM 7 Designation Symbol Unit TDM7.1-030-300-W11) TDM7.1-015-300-W0 Type of cooling natural convection forced ventilation Power section Current I(type) (A) 15 30 Peak current I(peak) (A) 15 30 Continuous current I(cont) (A) 8 12 Intermediate circuit d.c. voltage U(DC) (V) 300 (± 10%) 300 (± 10%) Type power P(cont) 4,5 9 Power loss with I(cont) P(v) (W) 90 135 Weight m (kg) 6,5 6,5 (kW) Current consumption of signal processing (without external load) + 24V Load voltage I(+UL) (mA) 250 250 + 15V Measuring voltage I(+UM) (mA) 150 150 - 15V Measuring voltage I(-UM) (mA) 75 75 I(+UL) (mA) Current capacitance of the voltages at terminal X43 for external consumption + 24V Load voltage 50 + 15V Measuring voltage I(+UM) (mA) 15 - 15V Measuring voltage I(-UM) (mA) 15 Operating conditions Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Maximum permissible ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Mounting height without reduction of rated data max. 1000m above NN Permissible humidity acc. to humidity classification F in acc. with DIN 40 040 Insulation category C in acc. with DIN VDE 0110 Type of protection IP 10 acc. to DIN 40 050 1) Servo drive module TDM 7.1-030-300-W1 can only be operated with a fan unit. 2) Current consumption is 800 mA when the 24V direct current fan unit LE5-024 is connected to the +24V of the servo drive module. Current consumption is reduced to 650 mA, if fan units LE5-220 or LE5-115 are used. Technical data: fan unit for forced ventilation in TDM 7.1-030-300-W1 Obsolete modules Designation Symbol Unit LE5-024-.. LE5-220-.. LE-115-.. Supply voltage U (V) DC24(-10%/+20%) AC220(±10%) AC115(±10%) Frequency f (Hz) - 50 ... 60 50 ... 60 3,6 W 20 VA 20VA 1 1,17 1,17 Power consumption P Weight m (kg) Figure 103: Technical Data of Servo Drive Module TDM7 164 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12. Technical Data of the Servo Drive Modules Type of cooling Natural convection KDS1.1-150-300-W1 KDS1.1-100-300-W1 KDS1.1-50-300-W1 KDS1.1-100-300-W0 Symbol Unit KDS1.1-050-300-W0 Designation KDS1.1-030-300-W0 Technical Data KDS 1 Forced ventilation Current I(type) (A) 30 50 100 50 100 150 Peak current I(peak) (A) 30 50 100 50 100 150 Continuous current I(cont) (A) 25 35 45 50 93 96 Link circuit d.c. voltage U(DC) (V) Power P(cont) (kW) 9 15 30 15 30 45 Power loss with internal with I(cont) P(v-int) (W) 60 70 90 85 150 160 Power loss external P(v-ext) (W) 130 150 200 220 400 430 Weight of drive module m (kg) 14,1 14,1 15,2 14,4 15,2 15,4 Weight of mechanical assembly set M1-KD m (kg) Weight of fan unit (kg) m 300 (± 15%) 1,7 without LE4 4,2 Current consumption of signal processing (without external load) + 24V Load voltage I(+UL) (mA) 750 950 1450 950 + 15V Measuring voltage I(+UM) (mA) 140 - 15V Measuring voltage I(-UM) (mA) 50 + 24V Load voltage I(+UL) (mA) 50 + 15V Measuring voltage I(+UM) (mA) 15 - 15V Measuring voltage I(-UM) (mA) 15 1450 1950 Current capacitance of the voltages at terminal X25 for external consumption Operating conditions Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Maximum permissible ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Mounting altitude without reduction of rated data max. 1000m above NN Permissible humidity according to humidity classification F in acc. with DIN 40 040 Insulation category C in acc. with DIN VDE 0110 Type of protection IP 10 acc. to DIN 40 050 Figure 104: Technical Data of Servo Drive Module KDS1 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 165 12. Technical Data of the Servo Drive Modules Technical Data TVM 1 Designation Symbol Unit TVM1. not ventilated TVM1. ventilated Current I(type) (A) 50 Peak current (300ms) I(peak) (A) 150 Nominal input voltage U(ACN) (V) 220 (± 15%) Link circuit d.c. voltage U(DC) (V) 300 (± 15%) Power P(typ) (kW) 15 15 Maximum power loss P(v) (W) 400 550 Bleeder peak power P(peak) (kW) 10 10 Bleeder continuous power P(cont) (W) 300 450 Maximum feedback energy W (kWs) 14 14 Weight m (kg) 14,3 15 Controller voltage output + 24V Load voltage U(L) (V) 24 ... 30 + 24VL Continuous current I(UL) (A) 4 (%) 10 + 24VL Standing wave ratio ± 15V Measuring voltage U(M) (V) 14,9 ... 15,1 + 15VM Continuous current I(+UM) (A) 0,85 - 15VM Continuous current I(-UM) (A) 0,85 (%) 2 (V) 220/380 or 115/220 (Hz) 50 ... 60 (%) +15 ... -10 ± 15VM Standing wave ratio Auxiliary voltage Input alternating-current voltage U(AC) Frequency f Voltage tolerance Supply for unit ventilation Supply voltage U (V) dropped 220 oder 115 Frequency f (Hz) dropped 50 ... 60 Power consumption P (W) dropped 30 Conditions of Operation Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Max. perm. ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Assembly altitude without reduction of rated data max. 1000m above NN Perm. humidity acc. to humidity classification F in acc. with DIN 40040 Insulation category C in acc. with DIN 570110 Type of protection IP 10 acc. to DIN 40050 Figure 105: Technical data of supply module TVM1 166 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12. Technical Data of the Servo Drive Modules Technical Data TVM 2 Designation Symbol Unit TVM 2.1-... TVM 2.2-.... Current I(type) (A) 50 Peak current (300ms) I(peak) (A) 150 Nominal input voltage U(ACN) (V) 220 (± 15%) Link circuit direct current voltage U(DC) (V) 300 (± 15%) Type power P(typ) (kW) 15 Maximum power loss P(v) (W) 580 Bleeder peak power P(peak) (kW) 10 Bleeder continuous power P(cont) (W) 450 Maximum feedback energy W (kWs) 14 Weight m (kg) 15 Controller voltage output + 24V Load voltage U(L) (V) 24 ... 30 + 24VL Continuous current I(UL) (A) 8 (%) 10 14,9 ... 15,1 + 24VL Standing wave ratio ± 15V Measuring voltage U(M) (V) + 15VM Continuous current I(+UM) (A) - 15VM Continuous current I(-UM) (A) 1,0 (%) 2 (V) 220/380 or 115/220 (Hz) 50 ... 60 (%) +15 ... -10 ± 15VM Standing wave ratio 0,9 1,3 Supply for controller voltage Input alternating-current voltage U(AC) Frequency f Voltage tolerance Supply for unit ventilation Supply voltage U (V) 220 or 115 Frequency f (Hz) 50 ... 60 Power consumption P (W) 30 Conditions of Operation Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Max. perm. ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Assembly altitude without reduction of rated data max. 1000m above NN Perm. humidity acc. to humidity classification F in acc. with DIN 40040 Insulation category C in acc. with DIN 570110 Type of protection IP 10 acc. to DIN 40050 Figure 106: Technical data of supply module TVM2 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 167 12. Technical Data of the Servo Drive Modules Technical Data KDV 1.3 Designation Symbol Unit KDV 1.3-100-220/300-... Current I(type) (A) 100 Peak current (300ms) I(peak) (A) 300 Nominal input voltage U(ACN) (V) 220 (± 10%) Link circuit d.c. voltage U(DC) (V) 300 (± 10%) Type power P(typ) (kW) max. 30 Power loss inside of control cabinet P(v) (W) 150 Power loss outside of control cabinet P(v) (W) max. 2000 Bleeder peak power P(peak) (kW) 40 Bleeder continuous power P(cont) (kW) 2 Maximum feedback energy W (kWs) 60 KDV Weight m (kg) 21 Weight of mechanical mounting accessories m (kg) 1,7 Weight of bleeder protective shell m (kg) 1,7 Weight of fan unit LE3 m (kg) 2,5 Controller voltage output + 24V Load voltage U(L) (V) 22 ... 30 + 24VL Continuous current I(UL) (A) 8 (%) 10 + 24VL Standing wave ratio ± 15V Measuring voltage U(M) (V) 14,9 - 15,1 + 15VM Continuous current I(+UM) (A) 1,5 - 15VM Continuous current I(-UM) (A) 1,5 (%) 0,1 (V) 220/380 or 220/115 (+15 ... -10)% ± 15VM Standing wave ratio Supply for controller voltage Input voltage U(AC) Frequency f (Hz) 50 ... 60 Power consumption auxiliary voltage P (VA) 500 Supply for unit ventilation Supply voltage U(AC) (V) 220 or 115 (+15 ... -10)% Frequency f (Hz) 50 ... 60 Power consumption P (VA) 15 Conditions of Operation Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Max. perm. ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Assembly height without reduction of rated data Perm. humidity acc. to humidity classification Insulation category max. 1000m above NN F in acc. with DIN 40040 C in acc. with DIN 570110 Figure 107: Technical data of supply module KDV1 168 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12. Technical Data of the Servo Drive Modules Technical Data KDV 2.2 Designation Symbol Unit KDV 2.2-100-220/300-220 Current I(type) (A) 100 Peak current (300ms) I(peak) (A) 300 Nominal input voltage U(ACN) (V) 220 (± 10%) Link circuit d.c. voltage U(DC) (V) 300 (± 10%) Type power P(typ) (kW) max. 30 Power loss inside of control cabinet P(v) (W) 150 Power loss outside of control cabinet P(v) (W) max. 2000 Bleeder peak power P(peak) (kW) 40 Bleeder continuous power P(cont) (kW) 2 (shutdown occurs at 2.5kW) Maximum feedback energy W (kWs) 100 KDV Weight m (kg) 17 Weight of mechanical mounting accessories m (kg) 1,7 Weight of bleeder protective shell m (kg) 1,7 Weight of fan unit LE3 m (kg) 2,5 Controller voltage output + 24V Load voltage U(L) (V) 22 ... 26 + 24VL Continuous current I(UL) (A) 12 (%) 2 + 24VL Standing wave ratio ± 15V Measuring voltage U(M) (V) 14,9 ... 15,1 + 15VM Continuous current I(+UM) (A) 2 - 15VM Continuous current I(-UM) (A) 2 (%) 0,1 (V) 220 (Hz) 50 ... 60 (%) +10 ... -10 ± 15VM Standing wave ratio Auxiliary voltage and fan supply Input voltage U(AC) Frequency f Voltage tolerance Power consumption auxiliary voltage P (VA) 500 Power consumption fan supply P (VA) 1000 Conditions of operation Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Max. perm. ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Assembly altitude without reduction of rated data max. 1000m above NN Perm. humidity acc. to humidity classification F in acc. with DIN 40040 Insulation category C in acc. with DIN 570110 Type of protection IP 10 ac. to DIN 40050 Figure 108: Technical data of supply module KDV2 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 169 12. Technical Data of the Servo Drive Modules Technical Data KDV 3.1 Designation Symbol Unit KDV 3.1-100-220/300-220 Power section Type current I(type) (A) 100 Peak current (300ms) I(peak) (A) 160 Nominal input voltage U(ACN) (V) 3 x 220 (± 10%) 50 ... 60 Hz Link circuit d.c. voltage U(DC) (V) 300 (± 10%) Feed-in continuous power P(cont) (kW) 30 (with additional capacity 4 mF) 22 (with additional capacity 2 mF) 14 (without additional capacity) Feed-in peak power P(peak) (kW) 48 Feedback continuous power P(RD) (kW) 20 (with additional capacity 2 mF) Feedback peak power P(RS) (kW) Bleeder continuous power P(BD) (W) 0 Bleeder peak power P(BM) (kW) 40 Maximum feedback energy with power off W (kWs) 100 Power loss inside control cabinet P(v) (W) 150 Power loss outside control cabinet P(v) (W) 500 14 (without additional capacity) 40 KDV Weight m (kg) 21 Weight of mechanical mounting accessories m (kg) 1,7 Weight of fan unit LE4 m (kg) 4,2 (V) 22 ... 26 Controller voltage output + 24V Load voltage U(L) + 24VL Continuous current I(UL) + 24VL Standing wave ratio (A) 11,5 (%) 2 ± 15V Measuring voltage U(M) (V) 14,9 ... 15,1 + 15VM Continuous current I(+UM) (A) 2 - 15VM Continuous current I(-UM) ± 15VM Standing wave ratio (A) 2 (%) 0,1 (V) 220 (±10%) Auxiliary voltage and fan supply Input voltage U(AC) Frequency f (Hz) 50 ... 60 Power consumption auxiliary voltage P (VA) 500 Max. power consumption of fan supply P (VA) 1000 Conditions of operation Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Max. perm. ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Assembly height without reduction of rated data max. 1000m above NN Perm. humidity acc. to humidity classification F in acc. with DIN 40040 Isulation category C in acc. with DIN 570110 Type of protection IP 10 acc. to DIN 40050 Figure 109: Technical data of supply module KDV3 170 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 12. Technical Data of the Servo Drive Modules Technical Data KDV 4.1 Designation Symbol Unit KDV 4.1-30-3 Input power section Nominal input voltage U(ACN) (V) 3 x 380 ... 460 (± 10%) 50 ... 60 Hz Link circuit direct current voltage U(DC) (V) 320 (± 10%) Link circuit continuous power P(cont) (kW) Output power section 30 (with additional capacity 4 mF) 22 (with additional capacity 2 mF) 14 (without additional capacity) Link circuit peak power P(peak) (kW) 48 Feedback continuous power P(RD) (kW) 20 (with additional capacity 2 mF) 14 (without additional capacity) Feedback peak power P(RS) (kW) 40 Bleeder continuous power P(BD) (W) 0 Bleeder peak power P(BM) (kW) 40 Maximum feedback energy with power off W (kWs) 100 Power loss inside control cabinet P(v) (W) 150 Power loss outside control cabinet P(v) (W) 500 KDV Weight m (kg) 21 Weight of mechanical mounting accessories m (kg) 1,7 Weight of fan unit LE4 m (kg) 4,2 (V) 22 ... 26 Controller voltage output + 24V Load voltage U(L) + 24VL Continuous current I(UL) + 24VL Standing wave ratio (A) 11,5 (%) 2 ± 15V Measuring voltage U(M) (V) 14,9 ... 15,1 + 15VM Continuous current I(+UM) (A) 2 - 15VM Continuous current I(-UM) ± 15VM Standing wave ratio (A) 2 (%) 0,1 Auxiliary voltage and fan supply Input voltage U(AC) (V) 220 (±10%) Frequency f (Hz) 50 ... 60 Power consumption auxiliary voltage P (VA) 500 Max. power consumption of fan supply P (VA) 1000 Conditions of operation Permissible ambient temperature range with rated data (°Celsius) +5 ... +45 Max. perm. ambient temperature with reduced rated data (°Celsius) 55 Storage and transport temperatures (°Celsius) -30 ... +85 Assembly height without reduction of rated data max. 1000m above NN Perm. humidity acc. to humidity classification F in acc. with DIN 40040 Insulation category C in acc. with DIN 570110 Type of protection IP 10 acc. to DIN 40050 Figure 110: Technical data of supply module KDV4 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 171 12. Technical Data of the Servo Drive Modules Technical Data TVD 1 Designation Symbol Unit TVD 1.2-15-3 TVD 1.2-08-3 Power section Input voltage U(ACN) Frequency f(N) (V) 3 x 380 ... 460 (± 10%) (Hz) 50 ...60 Link circuit direct current voltage U(DC) (V) Link circuit continuous power P(DC) (kW) 15 320 (± 5%) 7,5 Link circuit peak power P(KB-03) (kW) 45 22,5 Bleeder continuous power P(BD) (kW) 1 0,5 Bleeder peak power P(BM) Maximum feedback energy W(max) (kW) 40 20 (kWs) 60 30 Power loss with unit at maximum load P(v) (W) 330 180 Weight m (kg) 11,2 10,5 Controller voltage output Input voltage U(AC) (V) 3 x 380 ... 460 (±10%) Frequency f(N) (Hz) 50 ... 60 Power consumption S(el) (VA) 300 + 24V Load voltage U(L) (V) 22 ... 26 + 24VL Continuous current I(UL) (A) 7,5 Controller voltage output + 24VL Standing wave ratio (%) 2 (V) 14,9 ... 15,1 ± 15V Measuring voltage U(M) + 15VM Continuous current I(+UM) (A) 2,5 - 15VM Continuous current I(-UM) (A) 1,5 (%) 0,1 ± 15VM Standing wave ratio Conditions of operation Permissible ambient temperature range with rated data T(um) (°C) +5 ... +45 Max. perm. ambient temperature with reduced rated data T(umr) (°C) 55 Storage and transport temperatures T(L) (°C) -30 ... +85 Assembly height without reduction of rated data max. 1000m above NN Perm. humidity acc. to humidity classification F in acc. with DIN 40 040 Insulation category C in acc. with DIN 570 110 Type of protection IP 10 acc. to DIN 40 050 Figure 111: Technical data of supply module TVD1 172 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 13. Type Designation of Drive Components (Type Codes) 13. Type Designation of Drive Components (Type Codes) • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 173 13. Type Designation of Drive Components (Type Codes) MAC Servo-Motor 1 2 3 4 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 Abbrev. Example M A C 1 1 2 A - 0 - L D - 4 - C / 1 3 0 - A - 0 / W I 5 2 0 L V / S 0 0 5 1. 1.1 Term MAC . . . . . . . = MAC 2. 2.1 Motor model 112 . . . . . . . . . . . . . . . . = 112 3. 3.1 Model length Baulängen . . . . . . . . . = A, B, C, D 4. 4.1 4.2 4.4 4.5 4.6 4.7 4.8 4.9 Cooling method natural convection . . . . . . . . . . . . =0 surface ventilated blowing axially, AC 220V, Standard . . . . . . . . . . . . . . = 1 1 surface ventilated blowing axially, AC 115V, Standard . . . . . . . . . . . . . . = 2 1 surface ventilated radial, AC 220V, fan right = 6 surface ventilated radial, AC 220V, fan below = 7 surface ventilated radial, AC 220V, fan left =8 surface ventilated radial, AC 115V, fan right = A surface ventilated radial, AC 115V, fan below = B surface ventilated radial, AC 115V, fan left =C 5. Winding model 4.3 Standard application Applic. with increased synchr. quality 2 Rated speed / min-1 1500 2000 3000 6000 1500 2000 3000 5.1 5.2 5.3 5.4 MAC112A MAC112B MAC112C MAC112D 6. Feedback ZD PD KD HD VD LD HD FD LD GD ED CD ED - ZG PG KG HG VG LG HG FG LG GG EG EG Incremental encoder feedback . .. . . . . . . . . . . . . . .. . = 1-B Model Tacho voltage Tacho voltage see Techn. Data see Techn. Data Standard increased Standard increased Tacho volt 6V/ synchroniz. 1000 min-1 synchroniz. Tacho feedback Tacho feedback and B-side shaft end Tacho feedback with encoder construction 2-C 2-F 2HC 2HF 2LF 3-C 3-F 3HC 3HF 3LF 4-C 4-F 4HC 4HF 4LF 7. 7.1 7.2 Centering diameter for model B05 and B14 . . . . . . . . . . . . . . . . . . . . . . . . . . for model B05 and B14 . . . . . . . . . . . . . . . . . . . . . . . . . . 8. 8.1 8.2 8.3 8.4 Mounting position of power plug Power plug on side A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Power plug on side B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Power plug on left (view from front on to output shaft) . . . . . . . . . . . Power plug on right (view from front on to output shaft)) . . . . . . . . . = 130 = 180 =A =B =L =R aTypenschlMAC112 (aus INN 06.01-T10K-07/112) Figure 112: Type Key for MAC Servo-Motor 174 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 13. Type Designation of Drive Components (Type Codes) 1 2 3 4 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 Abbrev. Example: M A C 1 1 2 A - 0 - L D - 4 - C / 1 3 0 - A - 0 / W I 5 2 0 L V / S 0 0 5 9. 9.1 9.2 9.3 9.4 Blocking brakes without blocking brakes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 0 with standard blocking brakes (14 Nm) . . . . . . . . . . . . . . . . . . . . . . . . . . = 1 with reinforced blocking brakes (40 Nm) . . . . . . . . . . . . . . . . . . . . . . . . . = 2 3 with additionally reinforced blocking brakes (60 Nm) . . . . . . . . . . . . . . . = 3 3 10. Mounting arrangement 4 10.1 Standard mounting arrangement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = - I 10.2 Shock-damped mounting arrangement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = DI 11. Number of cycles per revolution 4 11.1 Available design see drawing no.: 9.552.121.4-XX 10. 10.1 10.2 10.3 10.4 10.5 10.6 Type of position feedback 4 Incremental encoder with standard mounting . . . . . . . . . . . . . . . . . . . . . . . . . = WI Incremental encoder with shock-damped mounting . . . . . . . . . . . . . . . . . . . . = DI Absolute value encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = AM Attachment set for position feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = WA Resolver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = WR Resolver with gear unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = GR 11. Position feedback identification 4 11.1 For available models see separate encoder documentation. 12. Custom Designs Determined by INDRAMAT and documented with a special code number. This field is dropped with standard motors. 12.1 E.g. S005 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = S005 Comments: 1 Axial surface ventilation cannot be supplied with feedback model "3..."; 2 Can only be delivered with feedback model "...F"; 3 Cannot be delivered with "MAC112A..."; 4 These fields do not apply to feedback models "2..." and "3..."; • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 bTypenschlMAC112 (aus INN 06.01-T10K-07/112) 175 13. Type Designation of Drive Components (Type Codes) Servo-Drive Module (Amplifier) Short text column 1 2 3 4 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 Example: T D M 1 . 2 - 0 5 0 - 3 0 0 - W1 - 1 1 5 / S 1 0 0 1. Term 1.1 TDM . . . . . . . . = TDM 2. Series 2.1 1 . . . . . . . . . . . . . . . . . . . = 1 3. Model 3.1 2 . . . . . . . . . . . . . . . . . . . . . . . . = 2 4. Type current 4.1 30 A . . . . . . . . . . . . . . . . . . . . . . . . = 030 4.2 50 A . . . . . . . . . . . . . . . . . . . . . . . . = 050 4.3 100 A . . . . . . . . . . . . . . . . . . . . . . . . = 100 5. Link circuit rated voltage 5.1 DC 300 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 300 6. Cooling 6.1 By means of natural convection (only with unit 30A) . . = W0 6.2 By means of built-in fan . . . . . . . . . . . . . . . . . . . . . . . . = W1 7. 7.1 7.2 7.3 7.4 Rated connection voltage for built-in fan Can be generated within unit . . . . . . . . . . . . . . . . . . . . . . . . . . . = 000 AC 115 V, 50...60 Hz . . .(Obsolete models) . . . . . . . . . . . . . . . . = 115 AC 220 V, 50...60 Hz . . .(Obsolete models) . . . . . . . . . . . . . . . . = 220 Is dropped with natural convection . . . . . . . . . . . . . . . . . . . . . . = ∆∆∆ 8. Custom Designs Determined by INDRAMAT and documented with a special code number. This field is dropped with standard units. 8.1 E.g.: S100 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = S100 Commands: ∆ = Vacancy; TypenschlTDM12 (aus INN 07.03-T01K-02/TDM) Figure113: Type codes for servo-drive module TDM 176 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 13. Type Designation of Drive Components (Type Codes) Servo-Drive Module in Cold-Running Technology (Amplifier) Abbrev. 1 2 3 4 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 Example: K D S 1 . 1 - 0 5 0 - 3 0 0 - W1 - 1 1 5 / S 1 0 2 1. Term 1.1 KDS . . . . . . . . = KDS 2. Series 2.1 1 . . . . . . . . . . . . . . . . . . . = 1 3. Model 3.1 1 . . . . . . . . . . . . . . . . . . . . . . . . = 1 4. Type current 4.1 30 A . . . . . . . . . . . . . . . . . . . . . . . . 4.2 50 A . . . . . . . . . . . . . . . . . . . . . . . . 4.3 100 A . . . . . . . . . . . . . . . . . . . . . . . . 4.4 150 A . . . . . . . . . . . . . . . . . . . . . . . . = 030 = 050 = 100 = 150 5. Link circuit ratedvoltage 5.1 DC 300 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 300 6. Cooling 6.1 By means of natural convection (only up to unit 100A) . = W0 6.2 By means of mounted fan (external fan unit "LE4") . . . . = W1 7. Rated connection voltage for mounted fan 7.1 AC 115 V, 50...60 Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 115 7.2 AC 220 V, 50...60 Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 220 8. Custom Design Determined by INDRAMAT and documented with a special code number This field is dropped with standard units. 8.1 E.g.: S102 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = S102 TypenschlKDS (aus INN 07.08-T01K-02/KDS) Figure114: Type codes for KDS servo-drive module • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 177 13. Type Designation of Drive Components (Type Codes) Programming Module Abbrev. 1 2 3 4 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 . . . 0 Example M O D 0 1 / 1 X 0 0 0 5 - 0 0 1 1. Term 1.1 MOD . . . . . . . . . . . . . . . . . . . . . . = MOD 2. Controller 2.1 TDM 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 01 2.2 TDM 1 with potentiometer at set-point = 02 2.3 KDS 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 03 2.4 KDS 1 with potentiometer at set-point = 04 2.5 TDM 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 05 2.6 TDM 2 with potentiometer at set-point = 06 2.7 TWM 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .= 07 2.8 KDW 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .= 09 2.9 TDM 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 13 2.10 TDM 3 with potentiometer at set-point = 14 2.11 DSC 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 15 2.12 DSC 3 with potentiometer at set-point = 16 2.13 TDM 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 17 2.14 TDM 4 with potentiometer at set-point = 18 2.15 TDM 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 19 2.16 TDM 6 with potentiometer at set-point = 20 2.17 TDM 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 21 2.18 TDM 7 with potentiometer at set-point = 22 2.19 ABD 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 23 2.20 ABD 2 with potentiometer at set-point = 24 3. 3.1 3.2 3.3 Feedback unit on motor INDRAMAT incremental encoder . . . . . . . . . . . . . . = 0 Tacho feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . = 1 Independent of the feedback unit (only with slave and current interface modules) . . = • 4. 4.1 4.2 4.3 Motor ventilation method Natural convection . . . . . . . . . . . . . . . . . . . . . . . . . . = 0 Surface ventilation . . . . . . . . . . . . . . . . . . . . . . . . . . = 1 Suitable for both types of ventilation . . . . . . . . . . . . . = X 5. Code digit motor-controller combination Determined and documented by INDRAMAT 5.1 E.g.: 0005 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 0005 6. Code digit input rating Determined and documented by INDRAMAT 6.1 E.g.: 001 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . = 001 TypenschlMOD (aus INN 07.50-T02K-02/MOD) Figure 115: Type Code for Programming Module MOD 178 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 14. Summary of Norms 14. Summary of the most important standards for INDRAMAT drive components Status: 02.93 Germany DIN VDE-Norm Europe EN-Norm International IEC-Norm DIN VDE 0160 DIN VDE 0530 Electronic resources such as: - Supply module (TVM, KDV, TVD), - Drive controllers (TDM, KDS, KDA, DDS) - Compact controllers (DSC, RAC) - Motor feedback electronics, Geber EN 60034 DIN VDE 0532 DIN VDE 0250 DIN VDE 0471 DIN VDE 0289 DIN VDE 0113 IEC 34-1 Motors (MAC, 2AD, 1MB, MDD) IEC 76-1 IEC 14 (CO)75 Transformers, Impedance coils (DST, DTT, DLT, GLD) Cable, insulated leads EN 60204-1 IEC 204-1, IEC 550 DIN VDE 0627 DIN VDE 0113 DIN VDE 0558 Defines Plug connections EN 60204-1 IEC 204-1 IEC 550 Complete drive systems IEC 22B (CO) 50 Semi-conductor rectifier - Supply module (TVM, KDV; TVD), - Drive controllers (TDM, KDS; KDA; DDS) - Compact controllers (DSC, RAC) DIN VDE 0550 Small transformers DIN VDE 0302 IEC 505 Insulation, insulating systems DIN VDE 0110 IEC 664 Insulation coordination, air and leakage paths of all equipment DIN VDE 0100 IEC 64 Construction of power plants below 1000 volts DIN VDE 0105 IEC 64 Power plant operation DIN VDE 0106 IEC 64 Protection categories, dangerous body currents • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 179 15. List of key words 15. List of key words A Acceleration times 117 Action to be taken 138 adaptor board AP 9 77 adjustment 119 air ducts 100 ambient air 100 ambient temperature 63, 136 application-specific functions 11 Applications 11 arrangement of modular units 54 AUX. VOLT 127 auxiliary mains power 127 B basic torque 117 Bb contact 121, 122, 136 Bb1 CLOSED 131 Bb1 contact 119, 121 BLC 1 133 BLC 2 133 BLC 3 133 BLC signals 134 BLEEDER OVERLOAD 129 Blocking brake 108 brake 108 BS 137 bus cable 76 Bus connection X1 91 Bus connections X1 104 BVW contact 123 C cable screens 78 cable shield 80 cable X1.1 121 Check 102 checking 99 cing device 64 Circuit diagram MOD 1 43 Clearing a Fault 125 cold-running technology 62 Commissioning 96 commissioning 101 Connecting plan 82 connection 76 Connection accessories 76 connection plan 84 Control cabinet internal temperature control cabinets 100 Control circuit signal 17 Control voltage 132 control voltage 108, 126 controller enable 112 controller enabling signal 52 Controller release 136 controller voltage 111 cross-sections 103 current 117 180 129 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 15. List of key words D Data on the Servo Drive Module 157 Deceleration energy 128 dew 100 diagnostic 108 Diagnostic displays 125 Diagnostics 119, 138 differential input 18 Dimensions sheet 64 direction of rotation 19 discharge time 110 disruptive reflections 79 Drift compensation 20, 113 Drive Configuration 115 E EARTH CON 129 Earthing Connections 81 electrical connecting accessories 55 electrostatic loads 99 eliminate faults 119 emergency off situations 109 emergency-off button 111 Emergency-Off Functions 109 emergency-off options 101 emergency-off switch 97 Emergency-stop function 23 enable signal 108 enabling signal 52 encoder 80 environmental influences 99 Equipment fuses 158 Equipment Replacement 140 Excess current 130 F fault 125 fault causes 125 Fault messages 121 Fault-Finding 119 fault-finding 121 Faults 121 feedback cable 94 Feedback Energy 118 filters 100 flush mounting equipment front view 55 54 G gasket 62 Ground leak 130 ground leak 137 Grounding 104 H heatsink 62 high-frequency equipment • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 81, 98 181 15. List of key words High-voltage checks HSM contact 124 Humidity 99 99 I immunity to interference 77 Impure air 100 Input weighting 37 input weightings 114 inputs/outputs 52 Inside temperature of control cabinet Instability 116 interface signals 121 interference 80 Ired input 22 131, 136 K K1NC contact 124 K1NO contact 124 L line connection X1 54 Line cross-section 76 link circuit busbars 110 link circuit short circuit 109 link circuit voltage 110 low voltages 99 M MAC servo motor 17 mains power 127 mains auxiliary voltage 132 mains auxilliary voltage 102 MAINS FAULT 127 mains power 125 mains voltage 135 master switch 98, 109 master-slave drive 23, 26, 112 Maximum cable length 77 measures 125 mechanical brake 119 mechanics 116 minimum clearance 64 motor brake 77 motor cable 131 motor current 117 Motor Data 154 motor feedback cable 133 Motor feedback cables 79 Motor power cable 77 motor power cable 92 motor temperature 77 motor thermostat contact 77 motor type 37 mounting altitude 63 mounting dimensions 64 mounting frame 62 N NC 182 113, 118, 121 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 15. List of key words NC operation 112 NCB bridge 121 NH contact 124 O oscillations 116 OVERCURRENT 130 OVERVOLT FUSE 128 OVERVOLTAGE 128 P Plug connection 92 plug-in terminal X1 119 plug-in terminals 80 position control loop 114 Position return 80 position-control loop 101, 115 Power or PWR 135 Power Reduction 63 power wiring 103 Power-Up Sequence 106 Preferred arrangement of modular units 54 problem 119 programming module 18, 37, 39 programming module MOD 116 Protecting the machine 101 Protection 97 Protection of Equipment and Machinery 98 Protection of Personnel 54 prototype commissioning 112, 115 purpose of service 98 R radio 98 Radio Equipment 81 Radio Interference Suppression 82 rated speed of the motor 53 Rating plate 39 rating plate 37, 102, 117 rating plate details 37 Rating plate of MAC motor 41 Rating plate of servo drive module 41 ready to operate 136 ready-made cable 77, 79 ready-to-operate 119 reduced motor current 22 Reduction 63 refrigerfators 100 Repair Card 141 replacing programming module MOD 102 resonance vibrations 115 Reversing the direction of rotation 20 RF 136 right rotational field 126 Rotor position signals 133 S safety guidelines 54 Safety of Personnel 96 servo applications 11 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 183 15. List of key words set-point encoder 111 Set-point smoothing 19 set-point smoothing 37, 114 Shielding 104 Short-circuit 130, 137 shut down 122 Signal lines 80 slave drive 23, 112 Smoothing 19 smoothing 37 soaring of the mechanics 112 sources of interference 81 Speed 15 Speed-controlled drive 18 stability 115 standards 179 Stopping 113 summing input 18 supply module 15, 102, 104 suppress interference 81 switching on 98 T Tacho 133 Tacho voltage 53 tandem drive 23 Technical Data 159 TEMP. FAULT 131 temperature 64 temperature of the control cabinet Temperature pre-warning 136 Terminal Strip 138 terminal strip 80 thermostat contact 77 tools 98 Torque 15, 117 torque 20, 53 Torque reduction 22 TS 136 TÜ 137 TÜ contact 122 TVW contact 123 Type Designation 173 type designations 102 type of servo drive 37 99 U UD contact 123 V Ventilation requirements 104 W weight compensation Weighting kMA 53 wiring diagrams 82 117 Z zero drift 20 zero speed set-point 184 114 TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 • TDM and KDS • 9.552.268.4-01 • 18. Januar 1994 185 Printed in Germany 256496 Rexroth Indramat