Final PDF to printer
Six Ideas
That Shaped
Physics
Third Edition
Thomas A. Moore
moo13946_fm_Title Page.indd
i
01/21/16 03:10 PM
Final PDF to printer
moo13946_fm_i-xvii.indd
ii
01/23/16 11:45 AM
Some Physical Constants
Speed of light
Gravitational constant
Coulomb’s constant
Permittivity constant
Permeability constant
Planck’s constant
Boltzmann’s constant
Elementary charge
Electron mass
Proton mass
Neutron mass
Avogadro’s number
c
G
1/4πε0
ε0
µ0
h
kB
e
me
mp
mn
NA
Standard Metric Prefixes
(for powers of 10)
3.00 × 108 m/s
6.67 × 10-11 N·m2/kg2
8.99 × 109 N·m2/C2
8.85 × 10-12 C2/(N·m2)
4π × 10-7 N/A2
6.63 × 10-34 J·s
1.38 × 10-23 J/K
1.602 × 10-19 C
9.11 × 10-31 kg
1.673 × 10-27 kg
1.675 × 10-27 kg
6.02 × 1023
Power
1018
1015
1012
109
106
103
10-2
10-3
10-6
10-9
10-12
10-15
10-18
Commonly Used Physical Data
Gravitational field strength g =│g
W│
(near the earth’s surface)
Mass of the earth Me
Radius of the earth Re
Mass of the sun M⊙
Radius of the sun R⊙
Mass of the moon
Radius of the moon
Distance to the moon
Distance to the sun
Density of water†
Density of air†
Absolute zero
Freezing point of water‡
Boiling point of water‡
Normal atmospheric pressure
†
‡
Prefix
exa
peta
tera
giga
mega
kilo
centi
milli
micro
nano
pico
femto
atto
Symbol
E
P
T
G
M
k
c
m
µ
n
p
f
a
9.80 N/kg = 9.80 m/s2
5.98 × 1024 kg
6380 km (equatorial)
1.99 × 1030 kg
696,000 km
7.36 × 1022 kg
1740 km
3.84 × 108 m
1.50 × 1011 m
1000 kg/m3 = 1 g/cm3
1.2 kg/m3
0 K = -273.15°C = -459.67°F
273.15 K = 0°C = 32°F
373.15 K = 100°C = 212°F
101.3 kPa
At normal atmospheric pressure and 20°C.
At normal atmospheric pressure.
Useful Conversion Factors
1 meter = 1 m = 100 cm = 39.4 in = 3.28 ft
1 mile = 1 mi = 1609 m = 1.609 km = 5280 ft
1 inch = 1 in = 2.54 cm
1 light-year = 1 ly = 9.46 Pm = 0.946 × 1016 m
1 minute = 1 min = 60 s
1 hour = 1 h = 60 min = 3600 s
1 day = 1 d = 24 h = 86.4 ks = 86,400 s
1 year = 1 y = 365.25 d = 31.6 Ms = 3.16 × 107 s
1 newton = 1 N = 1 kg·m/s2 = 0.225 lb
1 joule = 1 J = 1 N·m = 1 kg·m2/s2 = 0.239 cal
1 watt = 1 W = 1 J/s
1 pascal = 1 Pa = 1 N/m2 = 1.45 × 10–4 psi
1 kelvin (temperature difference) = 1 K = 1°C = 1.8°F
1 radian = 1 rad = 57.3° = 0.1592 rev
1 revolution = 1 rev = 2π rad = 360°
1 cycle = 2π rad
1 hertz = 1 Hz = 1 cycle/s
1 m/s = 2.24 mi/h = 3.28 ft/s
1 mi/h = 1.61 km/h = 0.447 m/s = 1.47 ft/s
1 liter = 1 l = (10 cm)3 = 10-3 m3 = 0.0353 ft3
1 ft3 = 1728 in3 = 0.0283 m3
1 gallon = 1 gal = 0.00379 m3 = 3.79 l ≈ 3.8 kg H2O
Weight of 1-kg object near the earth = 9.8 N = 2.2 lb
1 pound = 1 lb = 4.45 N
1 calorie = energy needed to raise the temperature of 1 g
of H2O by 1 K = 4.186 J
1 horsepower = 1 hp = 746 W
1 pound per square inch = 6895 Pa
1 food calorie = 1 Cal = 1 kcal = 1000 cal = 4186 J
1 electron volt = 1 eV = 1.602 × 10-19 J
( )
T = ( ___
5K ) (T
9°F
T = ____
1K (T[C] + 273.15°C)
1°C
[F]
+ 459.67°F)
( )
T[C] = ____
5°C (T[F] - 32°F)
9°F
T[F] = 32°F + ____
9°F T[C]
5°C
( )
Six Ideas
That Shaped
Physics
Unit C: Conservation Laws
Constrain Interactions
Third Edition
Thomas A. Moore
SIX IDEAS THAT SHAPED PHYSICS, UNIT C:
CONSERVATION LAWS CONSTRAIN INTERACTIONS, THIRD EDITION
Published by McGraw-Hill Education, 2 Penn Plaza, New York, NY 10121. Copyright © 2017 by
McGraw-Hill Education. All rights reserved. Printed in the United States of America. Previous editions
© 2003, and 1998. No part of this publication may be reproduced or distributed in any form or by any
means, or stored in a database or retrieval system, without the prior written consent of McGraw-Hill
Education, including, but not limited to, in any network or other electronic storage or transmission, or
broadcast for distance learning.
Some ancillaries, including electronic and print components, may not be available to customers outside
the United States.
This book is printed on acid-free paper.
1 2 3 4 5 6 7 8 9 0 RMN/RMN 1 0 9 8 7 6
ISBN 978-0-07-351394-2
MHID 0-07-351394-6
Senior Vice President, Products & Markets: Kurt L. Strand
Vice President, General Manager, Products & Markets: Marty Lange
Vice President, Content Design & Delivery: Kimberly Meriwether David
Managing Director: Thomas Timp
Brand Manager: Thomas M. Scaife, Ph.D.
Product Developer: Jolynn Kilburg
Marketing Manager: Nick McFadden
Director of Development: Rose Koos
Digital Product Developer: Dan Wallace
Director, Content Design & Delivery: Linda Avenarius
Program Manager: Faye M. Herrig
Content Project Managers: Melissa M. Leick, Tammy Juran, Sandy Schnee
Design: Studio Montage, Inc.
Content Licensing Specialists: Deanna Dausener
Cover Image: NASA
Compositor: SPi Global
Dedication
To All My Family, Near and Far
whose love conserves what is best
All credits appearing on page or at the end of the book are considered to be an extension of the copyright page.
The Internet addresses listed in the text were accurate at the time of publication. The inclusion of a
website does not indicate an endorsement by the authors or McGraw-Hill Education, and McGrawHill Education does not guarantee the accuracy of the information presented at these sites.
Library of Congress Cataloging-in-Publication Data
Names: Moore, Thomas A. (Thomas Andrew), author.
Title: Six ideas that shaped physics. Unit C, Conservation laws constrain
interactions/Thomas A. Moore.
Other titles: Conservation laws constrain interactions
Description: Third edition. | New York, NY : McGraw-Hill Education, [2016] |
2017 | Includes index.
Identifiers: LCCN 2015043352| ISBN 9780073513942 (alk. paper) | ISBN
0073513946 (alk. paper)
Subjects: LCSH: Conservation laws (Physics)—Textbooks.
Classification: LCC QC793.3.C58 M66 2016 | DDC 539.7/54—dc23 LC record available at
http://lccn.loc.gov/2015043352
www.mhhe.com
Contents: Unit C
Conservation Laws Constrain
Interactions
About the Author
Preface
Introduction for Students
Chapter C1
The Art of Model Building
C1.1
C1.2
C1.3
C1.4
C1.5
C1.6
Chapter Overview
The Nature of Science
The Development and Structure of Physics
A Model-Building Example
Trick Bag: Unit Awareness
Trick Bag: Unit Conversions
Trick Bag: Dimensional Analysis
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C2
Particles and Interactions
C2.1
C2.2
C2.3
C2.4
C2.5
C2.6
C2.7
Chapter Overview
The Principles of Modern Mechanics
Describing an Object’s Motion
Vector Operations
Momentum and Impulse
Force and Weight
Interaction Categories
Momentum Transfer
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
viii
ix
xvi
2
2
2
4
5
7
10
11
12
14
14
17
18
18
18
20
21
23
24
26
28
30
32
33
37
Chapter C3
Vectors
C3.1
C3.2
C3.3
C3.4
C3.5
C3.6
C3.7
Chapter Overview
Introduction
Reference Frames
Displacement Vectors
Arbitrary Vectors
Seven Rules to Remember
Vectors in Two Dimensions
Vectors in One Dimension
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C4
Systems and Frames
C4.1
C4.2
C4.3
C4.4
C4.5
C4.6
Chapter Overview
Systems of Particles
A System’s Center of Mass
How the Center of Mass Moves
Inertial Reference Frames
Freely Floating Frames
Interactions with the Earth
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C5
Conservation of Momentum
C5.1
C5.2
C5.3
C5.4
C5.5
Chapter Overview
Degrees of Isolation
How to Solve Physics Problems
Conservation of Momentum Problems
Examples
Airplanes and Rockets
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
38
38
38
40
40
41
44
45
47
48
49
49
51
52
52
52
54
54
57
59
60
62
64
65
67
68
68
68
70
71
75
76
79
81
82
83
v
Table of Contents
vi
Chapter C6
Conservation of Angular Momentum
C6.1
C6.2
C6.3
C6.4
C6.5
C6.6
C6.7
Chapter Overview
Introduction
Quantifying Orientation
Angular Velocity
The Angular Momentum of a Rigid Object
Twirl and Torque
Gyroscopic Precession
Conservation of Angular Momentum
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C7
More About Angular Momentum
C7.1
C7.2
C7.3
C7.4
C7.5
C7.6
C7.7
Chapter Overview
First Steps
The Cross Product
The Angular Momentum of a Moving Particle
Rotating Objects
Rotating and Moving Objects
Torque and Force
Why Angular Momentum Is Conserved
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C8
Conservation of Energy
C8.1
C8.2
C8.3
C8.4
C8.5
C8.6
C8.7
Chapter Overview
Introduction to Energy
Kinetic Energy
Potential Energy
Fundamental Potential Energy Formulas
Internal Energy and Power
Isolation
Solving Conservation-of-Energy Problems
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C9
Potential Energy Graphs
C9.1
C9.2
Chapter Overview
Interactions Between Macroscopic Objects
Interactions Between Two Atoms
84
84
84
86
86
87
88
91
92
93
96
97
99
100
100
100
102
103
105
106
107
108
110
112
113
117
118
118
118
120
121
122
124
126
126
127
130
131
134
136
136
136
138
138
C9.3
C9.4
C9.5
C9.6
C9.7
One-Dimensional Potential Energy Diagrams
Relaxing the Mass Limitation
The Spring Approximation
The Potential Energy “of an Object”
An Example
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C10
Work
C10.1
C10.2
C10.3
C10.4
C10.5
Chapter Overview
The Momentum Requirement
The Dot Product
The Definition of Work
Long-Range Interactions
Contact Interactions
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C11
Rotational Energy
C11.1
C11.2
C11.3
C11.4
C11.5
Chapter Overview
Introduction to Rotational Energy
Rotational Energy of an Object at Rest
Calculating Moments of Inertia
When an Object Both Moves and Rotates
Rolling Without Slipping
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C12
Thermal Energy
C12.1
C12.2
C12.3
C12.4
C12.5
C12.6
C12.7
Chapter Overview
The Case of the Disappearing Energy
Caloric Is Energy
Thermal Energy as Microscopic Energy
Friction and Thermal Energy
Heat, Work, and Energy Transfer
Specific “Heat”
Problems Involving Thermal Energies
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
139
144
145
146
146
148
149
152
154
154
154
156
157
158
161
162
165
166
169
170
170
170
172
172
174
176
177
182
183
185
186
186
186
188
188
190
192
193
194
196
199
200
202
Table of Contents
Chapter C13
Other Forms of Internal Energy
C13.1
C13.2
C13.3
C13.4
C13.5
C13.6
C13.7
Chapter Overview
Bonds
Latent “Heat”
Chemical Energy
Nuclear Energy
Modes of Energy Transfer
Mechanisms of Heat Transfer
A Comprehensive Energy Master Equation
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter C14
Collisions
C14.1
C14.2
C14.3
C14.4
C14.5
C14.6
Chapter Overview
Types of Collisions
One-Dimensional Collisions
Two-Dimensional Collisions
The Slingshot Effect
Using All Three Conservation Laws
Asteroid Impacts
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
vii
204 Appendix CA
204 The Standard Model
204
206
208
211
212
213
214
216
218
219
221
CA.1
CA.2
CA.3
CA.4
CA.5
CA.6
Introduction
Matter Particles
Fundamental Interactions
The Importance of Color-Neutrality
Stability and the Weak Interaction
Conclusion
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
240
240
240
242
243
245
246
246
246
Index
247
Periodic table
255
222
222 Short Answers to Selected Problems
222
224
224
227
230
232
234
236
237
239
240
240
256
About the Author
Thomas A. Moore graduated from Carleton College
(magna cum laude with Distinction in Physics) in 1976.
He won a Danforth Fellowship that year that supported
his graduate education at Yale University, where he
earned a Ph.D. in 1981. He taught at Carleton College
and Luther College before taking his current position at
Pomona College in 1987, where he won a Wig Award for
Distinguished Teaching in 1991. He served as an active
member of the steering committee for the national Introductory University Physics Project (IUPP) from 1987
through 1995. This textbook grew out of a model curriculum that he developed for that project in 1989, which
was one of only four selected for further development
and testing by IUPP.
He has published a number of articles about astrophysical sources of gravitational waves, detection of
gravitational waves, and new approaches to teaching
physics, as well as a book on general relativity entitled
A General Relativity Workbook (University Science Books,
2013). He has also served as a reviewer and as an associate editor for A
­ merican
Journal of Physics. He currently lives in Claremont, California, with his wife
Joyce, a retired pastor. When he is not teaching, doing research, or writing,
he enjoys reading, hiking, calling contradances, and playing Irish traditional
fiddle music.
viii
Preface
Introduction
This volume is one of six that together comprise the text materials for Six
Ideas That Shaped Physics, a unique approach to the two- or three-semester
calculus-based introductory physics course. I have designed this curriculum
(for which these volumes only serve as the text component) to support an
introductory course that combines two elements that rarely appear together:
(1) a thoroughly 21st-century perspective on physics (including a great deal
of 20th-century physics), and (2) strong support for a student-centered classroom that emphasizes active learning both in and outside of class, even in
situations where large-enrollment sections are unavoidable.
This course is based on the premises that innovative metaphors for
teaching basic concepts, explicitly instructing students in the processes of
constructing physical models, and active learning can help students learn the
subject much more effectively. In the course of executing this project, I have
completely rethought (from scratch) the presentation of every topic, taking
advantage of research into physics education wherever possible. I have done
nothing in this text just because “that is the way it has always been done.”
Moreover, because physics education research has consistently underlined
the importance of active learning, I have sought to provide tools for professors (both in the text and online) to make creating a coherent and self-­
consistent course structure based on a student-centered classroom as easy
and practical as possible. All of the materials have been tested, evaluated,
and rewritten multiple times. The result is the culmination of more than
25 years of continual testing and revision.
I have not sought to “dumb down” the course to make it more accessible.
Rather, my goal has been to help students become smarter. I have intentionally set higher-than-usual standards for sophistication in physical thinking,
but I have also deployed a wide range of tools and structures that help even
average students reach this standard. I don’t believe that the mathematical level required by these books is significantly different than that in most
university physics texts, but I do ask students to step beyond rote thinking patterns to develop flexible, powerful, conceptual reasoning and modelbuilding skills. My experience and that of other users is that normal students
in a wide range of institutional settings can (with appropriate support and
practice) meet these standards.
Each of six volumes in the text portion of this course is focused on a
single core concept that has been crucial in making physics what it is today.
The six volumes and their corresponding ideas are as follows:
Unit C:
Unit N:
Unit R:
Unit E:
Unit Q:
Unit T:
Conservation laws constrain interactions
The laws of physics are universal (Newtonian mechanics)
The laws of physics are frame-independent (Relativity)
Electric and Magnetic Fields are Unified
Particles behave like waves (Quantum physics)
Some processes are irreversible (Thermal physics)
ix
x
Preface
I have listed the units in the order that I recommend they be taught, but I have
also constructed units R, E, Q, and T to be sufficiently independent so they
can be taught in any order after units C and N. (This is why the units are
lettered as opposed to numbered.) There are six units (as opposed to five
or seven) to make it possible to easily divide the course into two semesters,
three quarters, or three semesters. This unit organization therefore not only
makes it possible to dole out the text in small, easily-handled pieces and
provide a great deal of flexibility in fitting the course to a given schedule,
but also carries its own important pedagogical message: Physics is organized
hierarchically, structured around only a handful of core ideas and metaphors.
Another unusual feature of all of the texts is that they have been designed
so that each chapter corresponds to what one might handle in a single
50-­minute class session at the maximum possible pace (as guided by years of
experience). Therefore, while one might design a syllabus that goes at a slower
rate, one should not try to go through more than one chapter per 50-minute
session (or three chapters in two 70-minute sessions). A few units provide
more chapters than you may have time to cover. The preface to such units
will tell you what might be cut.
Finally, let me emphasize again that the text materials are just one part of
the comprehensive Six Ideas curriculum. On the Six Ideas website, at
𝚠𝚠𝚠𝚙𝚑𝚢𝚜𝚒𝚌𝚜𝚙𝚘𝚖𝚘𝚗𝚊𝚎𝚍𝚞/𝚜𝚒𝚡𝚒𝚍𝚎𝚊𝚜/
you will find a wealth of supporting resources. The most important of these
is a detailed instructor’s manual that provides guidance (based on Six Ideas
users’ experiences over more than two decades) about how to construct a
course at your institution that most effectively teaches students physics. This
manual does not provide a one-size-fits-all course plan, but rather exposes
the important issues and raises the questions that a professor needs to consider in creating an effective Six Ideas course at their particular institution.
The site also provides software that allows professors to post selected problem solutions online where their students alone can see them and for a time
period that they choose. A number of other computer applets provide experiences that support student learning in important ways. You will also find
there example lesson plans, class videos, information about the course philosophy, evidence for its success, and many other resources.
There is a preface for students appearing just before the first chapter of
each unit that explains some important features of the text and assumptions
behind the course. I recommend that everyone read it.
Comments about the Current Edition
My general goals for the current edition have been to correct errors, enhance
the layout, improve the presentation in many areas, make the book more
flexible, and improve the quality and range of the homework problems as
well as significantly increase their number. Users of previous editions will
note that I have split the old “Synthetic” homework problem category into
“Modeling” and “Derivations” categories. “Modeling” problems now more
specifically focus on the process of building physical models, making appropriate approximations, and binding together disparate formulas. “Derivation” problems focus more on supporting or extending derivations presented
in the text. I thought it valuable to more clearly separate these categories.
The “Basic Skills” category now includes a number of multipart problems specifically designed for use in the classroom to help students practice
basic issues. The instructor’s manual discusses how to use such problems.
Preface
xi
I have also been more careful in providing instructors with more choices
about what to cover, making it possible for instructors to omit chapters without
a loss of continuity. See the unit-specific part of this preface for more details.
Users of previous editions will also note that I have dropped the menulike chapter location diagrams, as well as the glossaries and symbol lists that
appeared at the end of each volume. I could find no evidence that these were
actually helpful to students. Units C and N still instruct students very carefully on how to construct problem solutions that involve translating, modeling, solving, and checking, but examples and problem solutions for the
remaining units have been written in a more flexible format that includes
these elements implicitly but not so rigidly and explicitly. Students are rather
guided in this unit to start recognizing these elements in more generally formatted solutions, something that I think is an important skill.
The only general notation change is that now I use │v
W│ exclusively and
W . I still think it is very important
universally for the magnitude of a vector v
to have notation that clearly distinguishes vector magnitudes from other scaW) notation is too cumbersome to use exclusively, and
lars, but the old mag(v
mixing it with using just the simple letter has proved confusing. Unit C contains some specific instruction about the notation commonly used in texts by
other authors (as well as discussing its problems).
Finally, at the request of many students, I now include short answers to
selected homework problems at the end of each unit. This will make students
happier without (I think) significantly impinging on professors’ freedom.
Specific Comments About Unit C
This unit is the foundation on which a Six Ideas course rests. The current
course structure assumes that unit C is taught first, immediately followed by
unit N. Unit C contains core material that will be used in all the other units,
as well as providing an introduction to the process of model building that is
central to the course.
Why study conservation laws before Newtonian mechanics? The most
important reasons are as follows: (1) Conservation of “stuff” is a concrete
idea that is easy to understand. Beginning with such simple ideas helps build
student confidence at the beginning of the course. (2) Using conservation
laws does not really require calculus, and so helps students polish their algebra skills before getting involved with calculus. (3) Studying conservation of
momentum and angular momentum does require vectors, allowing students
to use vectors for several weeks in simple contexts before introducing vector calculus. (4) Conservation laws really are more fundamental than even
Newtonian mechanics, so it is good to start the course with concepts that are
central and will be used throughout the course.
I did not intuit these benefits at first: the earliest versions of Six Ideas
presented mechanics in the standard order. Rather, this inversion emerged
naturally as a consequence of observations of student learning and some
reflection about the course’s logical flow.
Inverting the order can be a challenge (in both a positive and negative
sense) for the student who already has some background in mechanics.
Reviewing mechanics from a different perspective can be quite good for such
a student because it makes her or him really think about the subject again. The
instructor can play a key role in helping such students appreciate this and by
emphasizing the power and breadth of the conservation law approach and
its importance in contemporary physics, as well as celebrating with them the
power one gains by being able to approach situations from multiple angles.
xii
Preface
The momentum-transfer model of interactions (introduced now in
chapter C2) is really what makes it possible to talk about conservation laws
­without starting with Newton’s laws. This model will be a new and challenging idea for almost everyone. Instructors should work carefully with students
to give them enough practice with the model to ensure they understand it
and can talk about it correctly. The payoff is that when students really grasp
this model, it by its very nature helps them avoid many of the standard misconceptions that plague students in introductory courses.
I have substantially revised this unit from the second edition, focusing
my attention on the following specific goals.
• I have enlarged the discussion of the model-building process, providing
new examples and a more (literally) up-front discussion of tricks and
techniques such as unit conversion and dimensional analysis.
• I have reorganized the first few chapters to provide a better logical flow.
• I have substantially rethought how to present expert problem-solving
styles. The second edition’s experiment with cartoon balloons and
interaction diagrams was not very successful with my students. I have
replaced this approach with checklists that specify tasks to complete and
a more flexible solution style that I think will be easier for students to
emulate. Colored comments on many of the example solutions help students see the connection between the solutions and checklists, and there
is also some opportunity for students to practice writing the comments
themselves, and so become more self-reflective about the process.
• I have brought the two vector conservation laws (momentum and angular momentum) together, which has several pedagogical advantages
(including highlighting how these quantities are similar and how they
both contrast with energy).
• I have also reorganized the angular momentum chapters so that the
basic idea (and what is necessary for later units) appears first and in its
own chapter. All the complicated material (involving the cross product)
appears in the second chapter, which may be postponed or even omitted.
• I have reorganized the material in the conservation of energy chapters
to better even out the pace and improve the logical flow. In particular,
I have separated the material on potential energy graphs from material
on bonds, latent heat, chemical energy, and nuclear energy (this was all
just too much for one chapter).
• Finally, and most importantly, I have reorganized the energy material
to be more consistent with the approach that John Jewett outlined in his
series of “Energy and the Confused Student” articles in various issues
of The Physics Teacher in 2008. While I don’t completely agree with Jewett on every issue, his insights into student difficulties were consistent
with what I have observed in the classroom, and I think his approach is
superior pedagogically to what I had been doing. This has meant saying
farewell to “k-work,” which now much more correctly appears as the
requirement that conservation of momentum imposes on a system. I now
also have a complete discussion of “work” that allows a consistent application to deformable systems (including human bodies).
Finally, I have sought to provide more flexibility for instructors. Most of
the chapters are crucial and should be discussed in order, but, as noted earlier, chapter C7 on the hard parts of angular momentum may be omitted or
delayed, because no other chapter depends on it.
Preface
xiii
I have also made chapter C14 optional. I think that is very valuable, particularly as a preparation for the last chapters of unit R, but it is not absolutely necessary.
Appreciation
A project of this magnitude cannot be accomplished alone. A list including
everyone who has offered important and greatly appreciated help with this
project over the past 25 years would be much too long (and such lists appear
in the previous editions), so here I will focus for the most part on people who
have helped me with this particular edition. First, I would like to thank Tom
Bernatowicz and his colleagues at Washington University (particularly Marty
Israel and Mairin Hynes) who hosted me for a visit to Washington University
where we discussed this edition in detail. Many of my decisions about what
was most important in this edition grew out of that visit. Bruce Sherwood and
Ruth Chabay always have good ideas to share, and I appreciate their generosity and wisdom. Benjamin Brown and his colleagues at Marquette University
have offered some great suggestions as well, and have been working hard on
the important task of adapting some Six Ideas problems for computer grading.
I’d like to thank Michael Lange at McGraw-Hill for having faith in the
Six Ideas project and starting the push for this edition, and Thomas Scaife
for continuing that push. Eve Lipton and Jolynn Kilburg has been superb
at guiding the project at the detail level. Many others at McGraw-Hill,
including Melissa Leick, Ramya Thirumavalavan, Kala Ramachandran,
David Tietz, and Deanna Dausener, were instrumental in proofreading
and producing the printed text. I’d also like to thank Dwight Whitaker
of Pomona ­College and and his Physics 70 students (especially Nathaniel
Roy, Eric Cooper, Neel Kumar, Milo Barisof, Sabrina Li, Samuel Yih, Asher
Abrahms, Owen Chapman, Mariana Cisneros, Nick Azar, William Lamb,
Wuyi Li, Errol Francis, and Cameron Queen) and my students in Physics 71
(especially Alex Hof, ­Gabrielle Mehta, Gail Gallaher and Jonah Grubb) for
helping me track down errors in the manuscript. David Haley and Marilee
Oldstone-Moore helped me with several crucial photographs and offered
useful feedback. Finally a very special thanks to my wife, Joyce, who
­sacrificed and supported me and loved me during this long and ­demanding
project. Heartfelt thanks to all!
Thomas A. Moore
Claremont, California
SmartBook is the first and only adaptive reading experience designed to
change the way students read and learn. It creates a personalized reading
experience by highlighting the most impactful concepts a student needs to
learn at that moment in time. As a student engages with SmartBook, the reading experience continuously adapts by highlighting content based on what
the student knows and doesn’t know. This ensures that the focus is on the
content he or she needs to learn, while simultaneously promoting long-term
retention of material. Use SmartBook’s real-time reports to quickly identify
the concepts that require more attention from individual s­ tudents–or the
entire class. The end result? Students are more engaged with course content,
can better prioritize their time, and come to class ready to ­participate.
xiv
Preface
Learn Without Limits
Continually evolving, McGraw-Hill Connect® has been redesigned to provide the only true adaptive learning experience delivered within a simple
and easy-to-navigate environment, placing students at the very center.
•
•
•
Performance Analytics – Now available for both instructors and students, easy-to-decipher data illuminates course performance. Students
always know how they’re doing in class, while instructors can view student and section performance at-a-glance.
Mobile – Available on tablets, students can now access assignments,
quizzes, and results on-the-go, while instructors can assess student and
section performance anytime, anywhere.
Personalized Learning – Squeezing the most out of study time, the adaptive engine in Connect creates a highly personalized learning path for
each student by identifying areas of weakness, and surfacing learning
resources to assist in the moment of need. This seamless integration of
reading, practice, and assessment, ensures that the focus is on the most
important content for that individual student at that specific time, while
promoting long-term retention of the material.
Introduction for Students
Introduction
Welcome to Six Ideas That Shaped Physics! This text has a number of features
that may be different from science texts you may have encountered previously. This section describes those features and how to use them effectively.
Why Is This Text Different?
Why active learning is crucial
Research into physics education consistently shows that people learn physics
most effectively through activities where they practice applying physical reasoning and model-building skills in realistic situations. This is because physics is not a body of facts to absorb, but rather a set of thinking skills acquired
through practice. You cannot learn such skills by listening to factual lectures
any more than you can learn to play the piano by listening to concerts!
This text, therefore, has been designed to support active learning both
inside and outside the classroom. It does this by providing (1) resources for
various kinds of learning activities, (2) features that encourage active reading,
and (3) features that make it as easy as possible to use the text (as opposed
to lectures) as the primary source of information, so that you can spend class
time doing activities that will actually help you learn.
The Text as Primary Source
Features that help you use the
text as the primary source of
information
What is active reading?
To serve the last goal, I have adopted a conversational style that I hope you
will find easy to read, and have tried to be concise without being too terse.
Certain text features help you keep track of the big picture. One of the
key aspects of physics is that the concepts are organized hierarchically: some
are more fundamental than others. This text is organized into six units, each
of which explores the implications of a single deep idea that has shaped
physics. Each unit’s front cover states this core idea as part of the unit’s title.
A two-page chapter overview provides a compact summary of that
chapter’s contents to give you the big picture before you get into the details
and later when you review. Sidebars in the margins help clarify the purpose
of sections of the main text at the subpage level and can help you quickly
locate items later. I have highlighted technical terms in bold type (like this)
when they first appear: their definitions usually appear nearby.
A physics formula consists of both a mathematical equation and a conceptual frame that gives the equation physical meaning. The most important
formulas in this book (typically, those that might be relevant outside the current chapter) appear in formula boxes, which state the equation, its purpose
(which describes the formula’s meaning), a description of any limitations on
the formula’s applicability, and (optionally) some other u
­ seful notes. Treat
everything in a box as a unit to be remembered and used together.
Active Reading
Just as passively listening to a lecture does not help you really learn what
you need to know about physics, you will not learn what you need by simply
xvi
scanning your eyes over the page. Active reading is a crucial study skill for
all kinds of technical literature. An active reader stops to pose internal questions such as these: Does this make sense? Is this consistent with my experience? Do I see how I might be able to use this idea? This text provides two
important tools to make this process easier.
Use the wide margins to (1) record questions that arise as you read (so you
can be sure to get them answered) and the answers you eventually receive,
(2) flag important passages, (3) fill in missing mathematical steps, and
(4) record insights. Writing in the margins will help keep you actively
engaged as you read and supplement the sidebars when you review.
Each chapter contains three or four in-text exercises, which prompt you
to develop the habit of thinking as you read (and also give you a break!).
These exercises sometimes prompt you to fill in a crucial mathematical detail
but often test whether you can apply what you are reading to realistic situations. When you encounter such an exercise, stop and try to work it out.
When you are done (or after about 5 minutes or so), look at the answers at
the end of the chapter for some immediate feedback. Doing these exercises is
one of the more important things you can do to become an active reader.
SmartBook (TM) further supports active reading by continuously measuring what a student knows and presenting questions to help keep students
engaged while acquiring new knowledge and reinforcing prior learning.
Features that support developing the habit of active reading
Class Activities and Homework
This book’s entire purpose is to give you the background you need to do the
kinds of practice activities (both in class and as homework) that you need
to genuinely learn the material. It is therefore ESSENTIAL that you read every
assignment BEFORE you come to class. This is crucial in a course based on this
text (and probably more so than in previous science classes you have taken).
The homework problems at the end of each chapter provide for different kinds of practice experiences. Two-minute problems are short conceptual problems that provide practice in extracting the implications of what you
have read. Basic Skills problems offer practice in straightforward applications of important formulas. Both can serve as the basis for classroom
activities: the letters on the book’s back cover help you communicate the
answer to a two-minute problem to your professor (simply point to the letter!). ­Modeling problems give you practice in constructing coherent mental
models of physical situations, and usually require combining several formulas to get an answer. Derivation problems give you practice in mathematically extracting useful consequences of formulas. Rich-context problems
are like modeling problems, but with elements that make them more like
realistic questions that you might actually encounter in life or work. They
are especially suitable for collaborative work. Advanced problems challenge advanced students with questions that involve more subtle reasoning
and/or difficult math.
Note that this text contains perhaps fewer examples than you would
like. This is because the goal is to teach you to flexibly reason from basic principles, not slavishly copy examples. You may find this hard at first, but real
life does not present its puzzles neatly wrapped up as textbook examples.
With practice, you will find your power to deal successfully with realistic,
practical problems will grow until you yourself are astonished at how what
had seemed impossible is now easy. But it does take practice, so work hard and
be hopeful!
Read the text BEFORE class!
Types of practice activities
­provided in the text
xvii
C1
The Art of Model
Building
Chapter Overview
Section C1.1: The Nature of Science
One of the main goals of science is the development of imaginative conceptual ­models
of physical reality. A model deliberately simplifies a complex reality in such a way
that it captures its essence and helps us think more clearly about it. This text’s main
purpose is to teach you the art of scientific model building, by helping you not only understand and appreciate the grand models we call theories but also practice building the
small-scale models one needs to apply a theory in a given situation.
Science is an unusually effective process for generating powerful models of reality that involves four crucial elements coming together:
1.
2.
3.
4.
A sufficiently large community of scholars, who share
A commitment to logical consistency as an essential feature of all models,
An agreement to use reproducible experiments to test models, and
A grand theory rich enough to provide a solid foundation for research.
In the case of physics, the Greek philosophical tradition created a community that
valued logical reasoning. Early Renaissance thinkers championed the value of reproducible experiments as being crucial for testing models. But physics was not really
launched until 1687, when Newton provided a theory of mechanics grand and compelling enough to unify the community and provide a solid context for research.
Section C1.2: The Development and Structure of Physics
Since the days of Newton, physicists have sought to create models able to embrace
originally distinct areas of study and thus cover broader ranges of physical phenomena. The current conceptual structure of physics, illustrated in figure C1.1, rests on
two grand theories: general relativity (GR) and the Standard Model (SM) of parti­
cle physics. In practice, though, physicists almost always use five simpler theories
(which are approximations valid in various limited contexts): newtonian mechanics,
special relativity, electromagnetic field theory, quantum mechanics, and statistical
mechanics. This text focuses on these five models.
Physicists have recently come to appreciate the role that symmetries play in
­physics. Both GR and the SM acknowledge (as almost any imaginable theory must)
certain symmetries (such as the time and position independence of physical laws)
that give rise to conservation laws (such as the laws of conservation of energy and
­momentum). Such laws have a validity beyond the specific theories currently in
vogue. Indeed, GR and the SM themselves are based on new, nonobvious symmetries.
Section C1.3: A Model-Building Example
To apply a grand theoretical model to any actual physical situation of interest, a scientist must construct an idealized model that simplifies the situation, bringing its
essence into focus in such a way that one can easily connect it to the grand model.
This course is designed to help you practice this process, which is really the only way
to learn how to do it. This section illustrates what is involved in an example situation.
In the process, the section describes some useful tricks that can help you simplify
situations and think about which simplifications are appropriate:
2
1. Lines or rays from a very distant point are nearly parallel.
2. The length of a gentle curve between two points is almost the same as that of a
straight line between those points.
3. The fractional uncertainty of a result calculated by multiplication or division
from uncertain quantities is roughly equal to that of the most uncertain quantity
involved. The same is true for the sine or tangent of small angles.
Part of the art of model building is to develop a bag of such tricks that you can
pull out when helpful. The only real way to learn these tricks is by practice, and also by
making mistakes that you learn to correct. So be bold and learn from your ­mistakes!
Solutions to most physics problems involve three different sections:
1. A model section that describes the simplifications one makes to the situation
2. A math section where one does the mathematics implied by the model
3. A check section where one decides whether the result makes sense
Your earlier experience with more trivial problems may lead you to neglect the model
and check sections, but I strongly recommend you do not. The model section is particularly important in this course. A good and sufficiently well-labeled diagram is
often the core of a sufficient model for problem solutions you prepare.
Section C1.4: Trick Bag: Unit Awareness
One of the most powerful tricks you can put in your bag is being aware of units. Units
give meaning to quantities and are essential for correctly communicating that meaning to others. Being constantly aware of units (even when working with symbolic
equations) is one of the best and easiest ways to spot mistakes in your work.
Here is a list of the things you should know to increase your unit awareness:
1.
2.
3.
4.
Know the basic and derived SI units and SI prefixes (see the inside front cover).
Know and/or refer to the SI unit benchmarks in figure C1.2.
Know that the units on both sides of an equation must match.
Know that you cannot add or subtract quantities with different units, but you
can multiply or divide them.
5. Know that you should be aware of units even in symbolic equations.
6. Know that math functions take unitless arguments and yield unitless results.
Section C1.5: Trick Bag: Unit Conversions
In most physics problem solutions, you will need to convert units. My preferred technique for doing this is the unit operator method, where you convert unit equalities
such as 1 mile = 1609 meters into a ratio equal to 1 such as 1 = (1 mi/1609 m) or
1 = (1609 m/1 mi). Since anything can be multiplied by 1 without changing it, you
can multiply any quantity by such a unit operator and cancel units top and bottom
(as if they were algebraic symbols) until only the units you want are left over. For
­example: 23 mi = (23 mi
)(1609 m/1 mi
) = 37,000 m. This method is foolproof as long as
@
@
you pay attention to unit consistency and to canceling units correctly.
Section C1.6: Trick Bag: Dimensional Analysis
Dimensional analysis is a surprisingly powerful trick that often yields good estimates
of physics formulas and/or quantities without requiring anything more than the
most basic knowledge of a situation. As such, it often represents the simplest model
you can construct of a given situation.
This trick takes advantage of the facts that (1) units must agree on both sides of
any equation, (2) that most formulas in physics are simple power laws, and (3) that
most unitless constants appearing in such formulas are within a factor of 10 or so of
one. The steps in applying dimensional analysis to a situation are as follows:
1.
2.
3.
4.
Decide what quantities your desired value might depend on.
Assume that these quantities appear in a power law formula (e.g., Q = KAmBn).
Find the powers by requiring units to be consistent on both sides of the formula.
Assume that the unitless constant K in front of the equation is 1.
3
4
Chapter C1
C1.1
Model building occurs at all
levels of science
The Nature of Science
By our nature, we humans strive to discern order in the cosmos and love to
tell stories that use ideas from our collective experience to “explain” what
we see. Science stands firmly in this ancient tradition: stories about how the
gods guide the planets around the sky and modern stories about how spacetime curvature does the same have much in common. What distinguishes
science from the rest of the human storytelling tradition are (1) the types of
stories scientists tell, (2) the process that they use for developing and sifting
these stories, and (3) the predictive success enjoyed by the surviving stories.
Scientists express their stories in the form of conceptual models, which
bear a similar relation to the real world as a model airplane does to a real jet.
A good scientific model captures a phenomenon’s essence while being small
and simple enough for a human mind to grasp. Models are essential because
reality is too complicated to understand fully; models distill complex phenomena into bite-sized chunks that finite minds can digest. Framing a model
is less an act of discovery than of imagination: a good model is a compelling
story about reality that creatively ignores just the right amount of complexity.
Model-making in science happens at all levels. Theories—grand models
embracing a huge range of phenomena—are for science what great novels are
for literature: soaring works of imagination that we study and celebrate for
their insight. But applying such a grand model to a real-life situation requires
building a smaller model of the situation itself, simplifying the situation and
making appropriate approximations to help us connect it to the grand model.
Scientists do this second kind of model-making daily, and one of the main
goals of this course is to help you learn that art.
Because models are necessarily and consciously simpler than reality, all
have limits: the full “truth” about any phenomenon can never be told. Pushing any model far enough eventually exposes its inadequacies. Even so, one
can distinguish better from poorer models. Better models are more logical,
more predictive in a broader range of cases, more elegantly constructed, and
more productive in generating further research than poorer ones are.
Science is really a process for building, evaluating, and refining models,
one that (since its beginnings in the 1600s) has proved to be an astonishingly
prolific producer of powerful and trustworthy models. It owes part of its success to its focus on the natural world, whose orderly behavior at many levels
makes finding and testing models easier than in the world of human culture.
Scholars of the philosophy and history of science suggest that a discipline
becomes a science only when the following four elements come together:
1.
2.
3.
4.
How physics became a science
The Art of Model Building
A sufficiently large community of scholars, who share
A commitment to logical consistency as an essential feature of all models,
An agreement to use reproducible experiments to test models, and
A grand theory rich enough to provide a solid foundation for research.
In the case of physics, the Greek philosophical tradition founded a community of scholars who appreciated the power of logical reasoning: indeed,
this community found logic’s power so liberating that it long imagined pure
logic to be sufficient for knowing. The idea of using experiments to test one’s
logic and assumptions was not even fully expressed until the 13th century,
and was not recognized as necessary until the 17th. Eventually, though, the
community recognized that the human desire to order experience is so strong
that the core challenge facing a thinker is to distinguish real order from merely imagined patterns. Reproducible experiments make what would otherwise
be individual experience available to a wider community, anchoring models
more firmly to reality. Galileo Galilei (1564–1642) was a great champion of
C1.2 The Development and Structure of Physics
this approach. His use of the newly invented telescope to display features of
heavenly bodies unanticipated by models of the time underlined to his peers
the inadequacy of pure reason and the importance of observation.
A prescientific community lacking a grand theory, however, tends to
fragment into schools, each championing its own theory. Rapid progress is
thwarted because each school sees any collected data through the lens of
its cherished model, making arguments virtually impossible to resolve. This
was the situation in physics during most of the 1600s. However, in 1687 Isaac
Newton published an ingenious model of physics broad enough to embrace
both terrestrial and celestial phenomena. His grand theory captured the imagination of the entire physics community, which turned away from a­ rguing
about partial models and toward working together to refine, test, and extend
Newton’s basic theory, confident that it would be shown to be universally
true and valid. At this moment, physics became a science.
The unified community now made rapid progress in constructing powerful subordinate models that greatly extended the reach of Newton’s grand
vision, feeding the Industrial Revolution along the way. Ironically, the community that strove energetically to extend Newton’s model universally eventually amassed evidence proving it incomplete! Only a community devoted to
a ­theory can collect the kind of detailed and careful evidence necessary to
expose its inadequacies, and thus move on to better theories. This irony is the
engine that drives science forward.
C1.2
5
The ironic paradox at the heart
of science
The Development and Structure of Physics
Unification of apparently distinct models has been an important theme in the
development of physics since Newton’s theory unified terrestrial and celestial physics. In the 1800s, work on electricity, magnetism, and light (initially
described by distinct partial models) culminated in an “electromagnetic field
model” embracing them all, and physicists found how to subsume thermal
phenomena into Newton’s model. This process was going so well in the late
1800s that the physicist Lord Kelvin famously claimed that there was probably little left to learn about physics!
In the early 1900s, though, physicists began to see that certain experimental results were simply incompatible with Newton’s framework. After
what amounted to a period of revolution, the community demoted Newton’s
theory and coalesced around two new grand theories—general ­relativity
(1915) and quantum mechanics (1926)—which embraced the new results but
yielded the same results as Newton’s theory in the appropriate limits.
In the 1950s, physicists were able to unify quantum mechanics, electromagnetic field theory, and special relativity (the nongravitational part of
general relativity) to create quantum electrodynamics (QED), the first example of a relativistic quantum field theory. In the 1970s, physicists extended
this model to create relativistic quantum field theories to describe two new
­(subatomic-scale) interactions discovered in previous decades and integrated
them with QED into a coherent theory of subatomic particle physics called
the Standard Model. This model has been quite successful, predicting new
phenomena and particles that have been subsequently observed. The m
­ odel’s
latest triumph was the discovery of the predicted “Higgs boson” in 2012.
Currently, general relativity, which covers gravity and other physical
phenomena at distance scales larger than molecules, and the Standard ­Model,
which works in principle at all distance scales but does not and cannot cover
gravity, stand as the squabbling twin grand theories of physics. Though no
known experimental result defies explanation by one or the other, physicists
The history of physics since
Newton
The current structure
of physics
Chapter C1
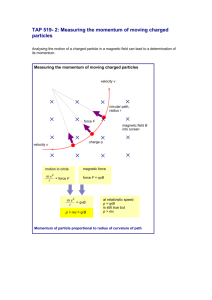
6
The Art of Model Building
Deep underlying SYMMETRIES in
the nature of physical interactions
CONSERVATION LAWS
**THE STANDARD MODEL**
(interwoven relativistic quantum field
theories for everything but gravity)
(Classical) ELECTROMAGNETIC FIELD THEORY
(approximately valid for weak
fields and large distances)
**GENERAL RELATIVITY**
(describes gravity and the motion of
objects bigger than molecules)
QUANTUM MECHANICS
(approximately valid at low
particle energies)
STATISTICAL MECHANICS
(describes complex objects
constructed of many
interacting particles)
SPECIAL RELATIVITY
(approximately valid in the
presence of weak gravitational
fields)
NEWTONIAN MECHANICS
(approximately valid for massive
objects moving much slower than
light in weak gravitational fields)
Figure C1.1
The current grand theories of
physics (starred) and the five
approximate models more often
used in practice.
The importance of symmetries
in physics
are dissatisfied with each theory (for different reasons) and especially distressed that we need two deeply incompatible theories instead of one. While
many unifying models have been proposed (string theory and loop quantum
gravity are examples), these models lack both the level of development and
the firm experimental basis to inspire general acceptance. The physics community is thus presently in the curious position of being devoted to two
grand theories we already know to be wrong (or at best incomplete).
In practice, however, physicists rarely use either to explain any but the most
exotic phenomena. Instead, they use one of five simpler theories: newtonian
mechanics, special relativity, electromagnetic field theory, quantum mechanics,
and statistical mechanics. Each has a more limited range of ­applicability than
the two grand theories, but is typically much easier to use within that range.
These theories, their limitations, and their relationships to the grand theories
and each other are illustrated in figure C1.1.
This diagram also emphasizes the importance of symmetry principles
in physics. Early in the 1900s, mathematician Emmy Noether showed that,
given plausible assumptions about the form that physical laws must have, a
symmetry principle stating that “the laws of physics are unaffected if you do
such-and-such” automatically implies an associated conservation law. For
example, the time-independence of the laws of physics (whatever those laws
might be) implies that a quantity that we call energy is conserved (that is, does
not change in time) in an isolated set of objects obeying those laws.
Conservation laws, therefore, stand independently and behind the
­particular models of physics, as figure C1.1 illustrates. For example, conservation of energy is a feature of newtonian mechanics, electromagnetic
field theory, special relativity, quantum mechanics, and statistical mechanics
C1.3 A Model-Building Example
­because all these theories involve physical laws that (1) have forms consistent
with Noether’s theorem and (2) are assumed to be time independent. Each
theory has a different way of defining energy, but all agree that it is conserved.
Symmetry principles are also important because both our current grand
models of physics (the Standard Model and general relativity) propose and
unravel the consequences of new and nonobvious symmetry principles. The
section of this text on special relativity illustrates this by displaying how relativity’s mind-blowing features are in fact simple logical consequences of the
symmetry principle that “the laws of physics are unaffected by one’s state
of (uniform) motion.” Linking other symmetry principles with their consequences is (unfortunately) not quite so simple (and is beyond the level of this
course), but is not qualitatively different.
Now, given the structure of physics illustrated in figure C1.1, it might
seem logical to begin studying physics by starting with the two fundamental
theories (or even the symmetry principles) and then working downward to
the five approximate theories. However, this is impractical because the fundamental theories, in spite of their awesome breadth and beauty, are (1) very
sophisticated mathematically and conceptually, (2) unnecessarily complicated to use in most contexts, and (3) necessarily expressed using the language
and concepts of the five simpler theories. One must therefore start by learning those simpler theories. The other five volumes of this textbook will provide you with a very basic introduction to all five of these simpler theories,
as well as exploring many of the supporting models that help broaden their
range. This unit begins the process by looking at the conservation laws (in
the context of newtonian mechanics) that underlie all these theories.
In the remainder of this chapter, though, we will explore the modelbuilding process in more detail and develop some general tools that help us
avoid errors and maximize what we can gain from even limited knowledge.
C1.3
7
Why one must learn the five
simpler theories first
A Model-Building Example
This book is designed partly to teach you the kind of creative model-building
that working scientists do daily. The model-building process cannot be reduced to formulaic procedures that one can follow like a recipe. It is an art
that requires knowledge, intelligence, creativity, and most of all, practice. You
can no more learn this art simply by reading books or attending lectures than
you can learn to play the piano simply by attending concerts.
So let’s practice! The exercise below poses a simple question you can
answer using some basic trigonometry and geometry, grade-school science,
and a bit of creative model building. Spend at least 10 minutes but no more
than 15 minutes trying to answer the question before turning the page.
Exercise C1X.1
About 240 B.C.E., Eratosthenes made the first good estimate of the earth’s size
as follows. Caravan travelers told him that in the village of Syene, one could
see the sun reflected in a deep well at noon on the summer solstice, meaning
that it was directly overhead. Eratosthenes noted that at the same time on
the same day in Alexandria (5000 Greek stadia to the north, as estimated by
camel travel time), a vertical stick cast a shadow about 1/8 of its length. What
is the earth’s radius in stadia? (Hint: Draw a picture. In 240 B.C.E., the Greeks
knew that the earth was spherical and the sun was very far away.)
One learns the art of model
building through practice
An example that illustrates the
model-building process
Chapter C1
8
Example C1.1
The Art of Model Building
Model If the sun is sufficiently far from the earth, light rays traveling from
the sun to Alexandria (point A) and Syene (point S) will be almost parallel.
Let’s assume they are exactly parallel and that the earth is perfectly spherical.
The figure below shows a cross-sectional view of the situation from the east.
θ
CLOSE-UP:
earth
shadow
stick
parallel rays
from the sun
stick
A
S
d
θ
θ
C
r
earth’s
circumference
=c
Because alternate interior angles are equal, the angle θ between the stick and
the sun’s rays at Alexandria is the same as the angle θ between lines AC and
SC, where C is the earth’s center. The stick is vertical by assumption, so it is
perpendicular to its shadow. Thus, the stick, the shadow, and the ray passing
the stick’s end form a right triangle (see the “close-up” above). If the shadow
is 1/8 the stick’s length, then tan θ = 1/8, so θ = tan-1(1/8) = 7.1°. The distance d between Alexandria and Syene is to the earth’s circumference c as θ is
to 360°, so c/d = 360°/θ. Note also that c = 2πr, where r is the earth’s radius.
Math Therefore
( )
(5000 stadia)(360°)
r = ___
c = ___
d ____
360°
= _________________
= 40,000 stadia
2π 2π θ
2π(7.1°)
(C1.1)
Check The exact length of Eratosthene’s stadion is historically ambiguous,
but if he meant the “itinerary stadion” (the one used for road trips), then
1 stadion = 0.157 km and r is 6300 km, pretty close to the modern value.
If you got something like this, congratulations! If you had trouble getting a useful result in 15 minutes, that’s normal. Doing a moderately realistic
problem like this is hard, not usually because the math or concepts are hard
(both are pretty basic here), but because constructing the model is hard. How
does one know what approximations to make? How does one create a schematic diagram of a situation (like the one shown) that usefully exposes its essential features? How do you frame things so that the mathematics is simple?
You may even be annoyed with my solution: “Well,” you might say, “if
I had known it was acceptable to make the false assumption that rays from the
sun are parallel, then the solution would have been easy!” That is precisely
the point! It is not only acceptable but also usually necessary to make simplifications to solve a problem at all. The trick is simplifying just enough to make
the problem tractable without making the result uselessly crude. There are
no “correct” answers in such a case, only poorer and better models that yield
poorer or better results (and if a poor result is the best one can do, it is still
better than nothing!). This is where the creativity and artistry comes in. My
goal is to help you learn to simplify (that is, to be productively and creatively
lazy) imaginatively, boldly, and exuberantly!
C1.3 A Model-Building Example
With this in mind, let’s examine more closely the simplifications and
a­ ssumptions behind the model in example C1.1. The solution assumes that
the sun is sufficiently distant that light rays from it are parallel at the earth: if
this is not so, the two angles marked θ in the diagram are not equal. No one
knew the distance to the sun in Eratosthenes’s time, so his assumption was
quite bold, but we now know that two rays from a single point on the sun that
­arrive at Syene and Alexandria, respectively, are not parallel, but ­actually make
an angle of about 0.00035° with each other. Solving this p
­ roblem “more correctly” by taking this into account yields an r that is smaller by about 0.005%.
However, this is truly insignificant compared with other simplifications
we are making. The sun’s angular diameter when viewed from the earth
is about 0.5°, so there is not just one ray that grazes the top of the stick and
­connects it with the shadow on the ground, but rather a bundle of rays that
could make angles with each other of as much as 0.53°. This means that
the end of the stick’s shadow will be blurred, making its length and thus the
angle θ uncertain by about ±0.26°. Also the hills and valleys between Syene
and ­Alexandria make the road distance d longer than the distance that would
be measured on a perfect sphere. Moreover, Alexandria is not due north of
Syene, as the drawing assumes it is. The earth is also not exactly spherical (its
polar radius is smaller than its equatorial radius by about 11 km).
I could state yet more subtle assumptions, but I think you get the point.
Reality is complicated, and the model simply ignores those complications.
Now, it turns out if you multiply or divide uncertain or erroneous quantities, the result has (roughly) the same percent uncertainty as the most uncertain
of the quantities. This weakest-link rule is also (roughly) true for t­angents
or sines of small angles. (Check it out for yourself: see problem C1D.1.) In
this case, the uncertainty in θ is roughly ±4% (±0.26°/7.1°) because of the
angular width of the sun, and the uncertainty in the distance d is likely to be
more than ±10%, since it is determined by camel travel time! The weakestlink rule implies, therefore, that we are not going to know the radius of the
earth to better than about ±10% no matter how good our model is. Making a
far more complicated model to correct the approximations described above is
not ­going to make the slightest bit of practical difference: we are simply not
given good enough information to calculate the earth’s radius more precisely.
The problem (as stated) therefore does not deserve a better model!
Part of the art of model building is knowing when a model is “good
enough.” Eratosthenes’s model was not merely “good enough;” it was pure
genius at the time, since no other method of determining the earth’s radius
was remotely as good. (Sometimes even a crude result is a big step forward!)
One learns the art of “good enough” mostly by practice. Indeed, I hope this
course will give you (among other things) a bag of useful tricks that are often
“good enough.” Treating lines from a distant point as parallel is one such
trick. The weakest-link rule about the uncertainty of multiplied or divided
quantities is another. Practice with tricks like these puts them into your bag.
Another important trick is recognizing the importance of a good diagram. Drawing (and carefully labeling) the drawing in example C1.1 was
probably the single most important thing I did to solve the problem. Most of
the “Model” in my solution merely restates the diagram verbally. A good
diagram is often the most important trick for solving a physics problem.
Indeed, solutions to all but the most trivial problems will involve the
three sections appearing in the example solution: a model section where one
draws a schematic diagram and/or discusses approximations and assumptions, a math section where one does the mathematics implied by the model
to solve for the desired result, and a check section where one checks the result
to see if it makes sense.
9
The simplifications and
­assumptions involved in
­example C1.1’s model
The “weakest link rule” for
uncertain quantities
The art of “good enough”
Good diagrams are essential
The three sections of almost
any physics problem solution
10
Chapter C1
Don’t neglect either the
“check” or “model” parts
Beginners often neglect the “check” section, but you will learn by
e­ xperience not to (if only to avoid submitting embarrassingly knuckle-headed
results). However, in this course (since it is about practicing model-building),
the model section is the most crucial part of any solution you submit. A model
need not be much more than a well-labeled diagram and/or a few comments
about assumptions. I will provide some examples to emulate as we go on.
Note that making mistakes (and then correcting them) is an honorable part
of the learning process. Werner Heisenberg, a great physicist of the early 1900s,
said that “An expert is [someone] who knows… the worst errors that can be
made in a subject… and [thus] how to avoid them.” This is true in my experience, and is something one can often only learn by making those ­mistakes.
The value of making mistakes
C1.4
Why unit awareness is
important
SI units and prefixes
STANDARD SI PREFIXES
Power
Prefix
Symbol
18
exa
E
15
peta
P
12
tera
T
9
giga
G
6
mega
M
10
10
10
10
10
3
10
kilo
k
10–2
centi
c
–3
milli
m
–6
micro
µ
–9
nano
n
–12
pico
p
–15
femto
f
atto
a
10
10
10
10
10
10–18
Table C1.1
Standard SI prefixes for powers of
10. (You can also find this table on
the inside front cover.)
The Art of Model Building
Trick Bag: Unit Awareness
An essential item for your bag of tricks is being aware of units. Units attach
physical meaning to bare numbers and communicating the magnitude of a
measured quantity requires using an agreed-upon unit for that quantity.
The importance of this was starkly illustrated in 1999 when NASA’s
$125-million Mars Climate Orbiter burned up in Mars’s atmosphere because
the spacecraft’s builders had been sending thruster data in English units
(pounds) to a NASA navigation team expecting data in metric units (newtons). One commentator to the Los Angeles Times stated, “[This] is going to be
a cautionary tale to the end of time.” (He got that right.)
To help avoid such catastrophic confusion, in this text I will most o
­ ften
use SI units (from the French Système Internationale), the modern version of
­metric units. An international committee has worked since 1960 to provide
clear and reproducible definitions for standard physical units. The entire system is based on seven base units, each with a standard ­abbreviation: the ­meter
(abbreviation: m) for distance, the second (s) for time, the ­kilogram (kg) for
mass, the kelvin (K) for temperature, the mole (mol) for counting molecules,
the ampere (A) for electric current, and the candela (cd) for luminous intensity (we will not use the candela in this course). The committee has defined
each unit (except the kilogram) in such a way that a scientist can in principle
recreate the unit in his or her own laboratory.
The SI committee has also defined derived units that are combinations
of the base units. The units we will use are the joule (1 J ≡ 1 kg·m2/s2) for
energy, the watt (1 W ≡ 1 J/s) for power, the newton (1 N ≡ 1 kg·m/s2) for
force, the pascal (1 Pa ≡ 1 N/m2) for pressure, the coulomb (1 C ≡ 1 A·s)
for electric charge, the volt (1 V ≡ 1 J/C) for electrical energy per unit charge,
the ohm (1 Ω ≡ 1 V/A) for electrical resistance, and the hertz (1 Hz ≡ 1 wave
cycle/s). Future chapters will describe what these derived units mean.
The SI committee has also defined a set of standard prefixes and prefix abbreviations (see table C1.1) that one attaches to a unit to multiply it
by ­selected powers of 10. Thus, 1 millimeter (abbreviation: mm) is equal to
10–3 m, 1 gigawatt (GW, pronounced with the g as in “get”) is 109 W, and
1 nanosecond (ns) = 10–9 s. You may already be familiar with some of the larger
prefixes from computer terminology (e.g., TB for terabyte = 1012 bytes, GHz
for gigahertz = 109 hertz). My experience is that English-speakers have the
most trouble distinguishing milli (= 10–3) from micro (= 10–6) because “milli”
sounds like “millionth” even though it means “thousandth.” I recommend
memorizing the prefixes at least from pico to tera.
Units for angles (the radian and the degree) are standard but (for historical reasons) are not considered formal SI units. I will sometimes also mention
English units like the mile (mi), foot (ft), and pound (lb) (a unit of force).
C1.5 Trick Bag: Unit Conversions
11
age of universe
= 13.7 Gy = 433 Ps
1054 kg
1012 s
31,700 yr
1042 kg
109 s
31.7 yr
1036 kg
106 s
11.6 days
1030 kg
the sun
103 s
16.7 min
1024 kg
the earth
edge of visible
universe ≈1026 m
1018 s
1021 m
galaxy diameter
1018 m
nearer stars
1027 m
1024 m
1015 m
1012 m
109 m
106 m
solar system diameter
earth diameter
= 12,760 km
1015 s
1s
10–3 s
103 m
10–6 s
1m
10–9 s
1 m = 3.28 ft
10–12 s
10–3 m
period of a typical sound wave
light travels
one foot
1012 kg
a hill
106 kg
≈ 1000 tons
1 kg
1 kg = 2.2 lb
10–6 kg
a mosquito
10–12 kg
a cell
10–6 m
small cell
10–15 s
10–9 m
atom diameter
10–18 s
light crosses
a molecule
10–18 kg
light crosses
a nucleus
10–30 kg
10–21 s
10–15 m
nucleus diameter
10–24 s
our galaxy
1018 kg
period of a typical
light wave
10–12 m
visible universe
1048 kg
10–24 kg
an atom
an electron
Figure C1.2
Some rough benchmarks for distances in meters, times in seconds, and masses in kilograms. (Note that the scales here are
logarithmic: equal distances on the scale correspond to multiplication by equal powers of ten.)
Being aware of units is also valuable even when working with symbolic
equations. One cannot add or subtract quantities with different units (though
multiplying and dividing such quantities are fine). So an expression that (for
example) contains 1 + m (where m is a mass) is absurd. If you find yourself
writing such an equation, you should know that you have made a mistake.
Also, for the record, all mathematical functions [such as sin(x), tan–1(x),
x
e , ln x] all require a unitless argument and produce a unitless result. For historical reasons, angles in both degrees and radians are considered unitless.
One way to spot silly results is to know some SI benchmarks (see
­figure C1.2). For example, if a question asks you how high you can throw a ball
and you get a distance larger than a galaxy, maybe something is wrong, hmm?
Check figure C1.2 if a calculation’s results seem off. It is also cool to be able to
say to your friends at the end of the school year “See you in about 9 megaseconds” and have them understand. (OK, maybe that is just a bit geeky.)
C1.5
Being aware of units in symbolic expressions is also good
Know some benchmarks!
Trick Bag: Unit Conversions
In many realistic physics problems, you are likely to have to change units.
One of the most handy tools in your bag of tricks is a foolproof way to convert units. My favorite technique is the unit operator method. For example,
suppose that you know that your hair grows at a rate of 6 inches per year
and you’d like to know what this is in nanometers per second. We start by
writing down the equations that define the relationships between the units
(which you can find inside the front cover):
1 nm = 10-9 m, 1 m = 3.28 ft, 1 ft = 12 in, 1 y = 3.16 × 107 s
(C1.2)
The “unit operator” method
for unit conversion
12
Chapter C1
The Art of Model Building
Since 1 m is equivalent to 3.28 ft, the ratio of these quantities is 1:
(
)
(
) ( )(
)
1y
1 ft
1m
1 nm
______
= 1 and similarly, 1 = ______
-9 = _____
= ___________
3.17 × 107 s
12 in
10 m
3.28 ft
(C1.3)
Such a ratio is thus called a unit operator. Since we can multiply anything by
1 without changing it, we can multiply our original rate by 1 in the form of
these unit operators. If you then rearrange factors and cancel the units that
appear in both the numerator and denominator, we get the desired result:
( )
( )( )( )(
)(
)
1 y
1 nm ___________
6 in _____
6 in
1 ft
⨉ ______
1 m _______
│
____
·1·1·1·1 = ____
-9
y 12
│
y
3.28 ft
⨉ 10 m 3.16 × 107 s
in
⧹
⧹
6
= ______________________
____
nm
= 4.8 ____
nm
s
12(3.28)(10-9)(3.16 × 107) s
Why this method is so great
Note that we can treat all of the units as if they were simply algebraic symbols
that we can cancel if they appear in both the numerator and denominator!
This unit operator method is great because if I didn’t have the right
­power for one of the unit operators or put it upside down by accident, the
units would not cancel and I would have a mess of leftover units that would
signal that I had done something wrong. This method is absolutely foolproof as
long as you make sure that unwanted units really do cancel out. (Foolproof
is good!)
How do I know when a unit operator is “right side up?” [After all, 1 =
(1 m/3.28 ft) and 1 = (3.28 ft/1 m) both!] “Right side up” for a unit operator
is whichever way gets the units to cancel as you need. It’s like the joke where
a student asks a sculptor how to make a good statue of a person. The sculptor
replies, “Just remove whatever parts of the rock don’t look like the person.” In
the unit conversion task, just arrange your unit operators so that they ­remove
any units that don’t look like the final units you need.
C1.6
(1) Think about what the
desired quantity might
depend on
(2) Assume a power-law
formula
(C1.4)
Trick Bag: Dimensional Analysis
Dimensional analysis is a very cool trick because you can often use it to estimate an answer or guess a formula even if you know almost nothing about
the physics involved. This will amaze your friends (convincing them that you
know more than you do) and is a sign to other physicists that you belong.
The trick is based on the fact that the units on both sides of any equation
must be consistent. We can often combine this with simple plausibility arguments to find a formula for a desired quantity even if we haven’t a clue about
how to actually derive that formula. This often represents the simplest model
one can construct (one based on only the most fundamental assumptions).
Consider the following problem as an example. The radius R of a black
hole is the radius inside which all light is trapped by the black hole’s gravitational field. What is this radius for a black hole with a given mass M?
Don’t panic just because we don’t know any general relativity! Think:
what could R depend on? It could plausibly depend on the black hole’s
mass M, the speed of light c, and the universal gravitational constant G that
characterizes the strength of the gravitational field created by a given mass
(we will study this constant more later). No other physical quantity appears
to be relevant. So let’s assume that only these quantities will appear in the
formula for R. This is the first assumption in our model.
Secondly, let’s assume that the formula has the form
R = KG j Mk cn
(C1.5)
C1.6 Trick Bag: Dimensional Analysis
13
where K is some as-yet-unknown unitless constant and j, k, and n are as-yetunknown powers (not necessarily integers). This is a big assumption, but not
completely bonkers. For example, as the black hole’s mass M goes to zero, we
would expect the trapping radius R goes to zero. Similarly, if G W 0 (meaning
that the gravitational field created by a given mass goes to zero), R should
also go to zero. Both expectations are consistent with the formula.
Let {a} represent the SI units of the quantity a. Thus, {R} = m, {M} = kg,
{c} = m/s (since c is a speed), and {G} = m3/(kg·s2) (see the inside front c­ over).
So if the units in equation C1.5 are to be consistent, we must have
( ) ()
j
3
n
m = {R} = {K}{G}j {M}k {c}n = _____
m 2 (kg)k __
m = m3j+nkgk-j s-2j-n
s
kg·s
(C1.6)
Since we do not have any units of kilograms on the left side of equation C1.6,
we must have k – j = 0, or k = j. Since we also do not have units of seconds on
the left, we must have –n – 2j = 0, or n = –2j. We have one power of meters
on the left side, so 3j + n = 1 or (substituting n = –2j from above) 3j – 2j = 1,
so j = 1. So our formula must be
GM
R = KG jM kc n = KG1M1c-2 = K ____
(C1.7)
c2
The constant K we have included (for greater generality) does not have
any units, so this method cannot determine its value. If we assume that K = 1,
then the radius of a black hole with a mass equal to that of the sun is
(
)
1.99 × 1030 kg
m3 _______________
-11 _____
R = ____
GM
=
6.67
×
10
= 1470 m
2
2
8
c
· s⨉ (3.00 × 10 m
kg @/s⨉ )2
@
(3) Require unit consistency
(C1.8)
Therefore, this super-simple model predicts that if our sun were to become a
black hole, its radius would be about 1.5 km.
Now you might think this result completely untrustworthy because of
all the assumptions we have made. Even granting the plausibility of the
­argument that the result must depend only on G, M, and c, what justifies the
outrageous assumptions we made in equation C1.5 and in setting K = 1?
Such assumptions turn out to be surprisingly trustworthy. The universe
seems to prefer simple formulas to complicated ones, and unitless constants
appearing in physics formulas usually turn out to be like 1/3, π, or 5/8, not
something very large or very small. Therefore taking the unitless constant to
be equal to 1 has an uncannily good chance of yielding a reasonable estimate
(within a factor of 10 or so). It doesn’t always work, but it often does, and
when it does, one can get a good first estimate with spectacularly little effort.
In this particular case, the full derivation using general relativity shows
that a black hole’s radius is really R = 2GM/c2. Thus, we got everything absolutely right except that K = 2, not 1. Not bad for such a simple model!
For historical reasons, this method is called dimensional analysis (long
ago, but not today, a quantity’s units were called its “dimensions”).
Now you practice. (After making a good effort, check the chapter’s end.)
Exercise C1X.2
When the core of a massive star exceeds about 1.4 solar masses near the end
of its life, reactions in its interior suddenly remove the very particles that have
been supporting it against its own gravitational field. What is left of the core
then falls basically freely inward from rest at a radius of about 10,000 km to
a final radius that is negligible in comparison. (This violent collapse ­usually
ignites a supernova explosion). How long does this collapse process take?
(4) Assume that any unitless
constant is approximately 1
14
Chapter C1
The Art of Model Building
TWO-MINUTE PROBLEMS
C1T.1 According to the definition of “science” given in
this chapter, astrology is not a science. What does it lack?
A. A community of scholars devoted to its study
B. Agreement that models must be logically consistent
C. Use of reproducible experiments to test models
D. A grand theory embracing the discipline
C1T.2 According to the definition of “science” given in this
chapter, which of the following do you think are sciences?
Choose the letter of the first discipline on the list that you
think is not a science. (The answer is open to debate!)
A. Geology
B. Psychology
C. Economics
D. Anthropology
E. Political Science
F. Philosophy
T. All are sciences
C1T.3 Which of the following expressions gives the correct units for the volt in terms of base SI units?
A. 1 V = 1 kg·m2C–1s
B. 1 V = 1 kg·m2A–1s–3
C. 1 V = 1 kg·m·A–1s–1
D. 1 V = 1 kg·m2s–2C–2
E. 1 V = 1 J/C
F. Some other expression (specify).
C1T.4 Assume that D and R have units of meters, T has
units of seconds, m and M have units of kilograms, v has
units of meters per second, and g has units of m/s2. Which
of the following equations has self-consistent units?
A. D = mR2
B. m = M[1 + R2]
C. D = [1 – m/M]gT2
D. g = mv2/R
E. D = v2/RT
F. None of these can be correct.
C1T.5 One can raise a quantity q to a power a when a has
units. T or F?
C1T.6 The following formulas are supposed to describe
the speed v of a sphere sinking in a thick fluid. C is a unitless constant, ρ is the fluid’s density in kg/m3, A is the
sphere’s cross-sectional area, m is its mass, and g is the
gravitational field strength in N/kg. Which could be right?
A. v = CAρg
B. v = Cmg/ρA
C. v = (Cmg/ρA)2
D. v = (Cmg/ρA)1/2
E. None of these can be correct.
C1T.7 The speed v of sound waves in a gas like air might
plausibly depend on the gas’s pressure P (which has units
of N/m2), the gas’s density ρ (which has units of kg/m3)
and its temperature T (which has units of K), and some
unitless constant C. Assuming that no other quantities are
relevant, which of the following formulas might possibly
correctly give the speed of sound in a gas?
A. v = CPρT
B. v = CTP/ρ
C. v = CP/ρ
____
D. v = C____
P/ρ
E. v = Cρ/P
F. v = C(P/ρ)2
T. None of these can be correct.
C1T.8 The two stars in a binary star system revolve around
each other with a certain period T. Which of the quantities
listed below is not likely to be a part of the formula for this
revolution period?
A. m1, m2 (the masses of the stars in the system)
B. r (the distance between the binary stars)
C. ℏ (Planck’s constant, which is generally associated
with phenomena involving quantum mechanics)
D. G (the universal gravitational constant)
HOMEWORK PROBLEMS
Basic Skills
C1B.1 If you text to a friend “I’ll be over in 0.50 ks,” how
many minutes will your friend wait? (Use unit operators.)
C1B.2 What is the speed of light in furlongs per fortnight?
(One furlong = _ 18 mi = length of a medieval farm furrow,
and one fortnight = 14 days. Use unit operators.)
C1B.3 A light year (1 ly) is the distance that light travels in
one year. Find this distance in miles. (Use unit operators.)
C1B.4 The speed of the earth in its orbit around the sun
is 18 km/s. Find this speed (a) in miles per hour and
(b) in knots, where 1 knot = 1 nautical mile per hour, and
1 nautical mile = 1852 m. (Use unit operators.)
C1B.5
What is a month in seconds (approximately)?
C1B.6 Water’s density is 1000 kg/m3. Use unit operators
to show that a cube of water 10 cm on a side has a mass of
1 kg, and 1 cm3 of water has a mass of 1 g. (This used to be
the definition of the kilogram, but the difficulty of precisely measuring volumes made this standard impractical.)
Homework Problems
C1B.7 A friend says that the range D of a projectile fired at a
speed v at an angle θ above the horizontal is D = v sin 2θ/g,
where g has units of m/s2. (a) Explain why this can’t be
right. (b) Propose a modification so that D still depends on
v and g but could be right.
C1B.8
Do problem C1T.6 and explain your answer.
C1B.9
Do problem C1T.7 and explain your answer.
Modeling
C1M.1 Can “What is justice?” be investigated scientifically?
If you think not, does this mean that “justice” does not e­ xist
or is not worth thinking about? If you think so, can you
­scientifically verify your belief? Defend your responses.
C1M.2 The text describes that historically, physics became
a “science” when the physics community accepted Newton’s mechanics as its “grand theory.” What do you think is
or was the corresponding grand theory that made biology
a science? Chemistry? Geology? Defend your responses.
C1M.3 As a fraction of the stick’s length, what is the length
of a vertical stick’s shadow in Saint Petersburg, Russia, at
noon on the summer solstice? (Saint Petersburg is 3230 km
almost due north from Alexandria.)
C1M.4 Consider an object of mass m moving in a circle of
radius r with a constant speed v. What is a possible formula for the object’s acceleration a (in m/s2)?
C1M.5 A planet’s “escape speed” is the speed ve which an
object must have at the planet’s surface to be able to escape
the planet’s gravitational embrace and coast to an infinite
distance. This speed depends on the planet’s mass M, its
radius R, and the universal gravitational constant G. Up to
an overall constant, what must the formula for ve be?
C1M.6 Imagine slicing a thick disk of radius R in half along
its diameter. If you stand the half-disk on its curved edge
and nudge it, it will rock back and forth. If the rocking is not
too extreme, the time T required for a complete back-andforth oscillation turns out to be nearly independent of the
angle through which the disk rocks. The only other things
that T might plausibly depend on are the disk’s radius R,
its mass M, and the local gravitational field strength g (in
m/s2), since gravity is what is causing the rocking motion.
(If you think about it, the disk’s thickness is only relevant
in that a thicker disk has more mass than a thinner one, so
we already have this covered if we consider dependence
on M.) Use dimensional analysis to find a reasonable formula for this rocking time up to a unitless constant.
C1M.7 Consider various pendula, each consisting of a rod
hanging in the earth’s gravitational field from a pivot at its
end and that is free to swing around that pivot. The rods
have identical shapes, but different lengths L (and diameters proportional to those lengths). The rods also might
15
have different densities and thus masses m that don’t scale
simply with L. Experimentally, the period T of such a pendulum does not depend on the angle of swing for small
oscillations. Find an approximate formula for the period T,
and estimate T for a 1-m rod. (Hints: You should not assume, but rather show by dimensional analysis that the
rod’s mass is irrelevant. The gravitational field strength g
has units of m/s2.)
C1M.8 The radius r of a hydrogen atom (which consists of a
proton and a comparatively lightweight electron) can only
depend on the (equal) magnitudes e of the proton’s and
the electron’s charge, the Coulomb constant 1/4πε0 that
characterizes the strength of the electrostatic attraction
­between the proton and electron, the mass m of the orbiting electron, and (because quantum mechanics is likely
­involved) Planck’s constant in the form h/2π = ℏ. (Since
the proton remains essentially at rest, its mass turns out to
be irrelevant.)
(a) Assuming that r depends only on the stated quantities,
use dimensional analysis and the information given
inside the front cover of the text to find a plausible formula for the radius of a hydrogen atom.
(b) Calculate a numerical estimate of the radius.
(c) Explain why this is only an estimate.
C1M.9 Consider an object of mass m hanging from the end
of a spring whose other end is attached to a fixed point. The
object will oscillate vertically with some period T, which
might depend on the object’s mass, the spring’s stiffness
constant ks (in N/m), which expresses how much force the
spring exerts when it is stretched a certain distance, and
the gravitational field strength g (in m/s2) at the earth’s
surface (since the object is moving up and down in the
earth’s gravitational field). We find e­ xperimentally that the
period does not depend on either the object’s ­maximum
speed or how far it moves up and down.
(a) Up to a unitless constant, what is the formula for the
period in terms of ks, m, and g?
(b) On the basis of your calculation, if the object oscillates
with a period of 1.0 s on the earth’s surface, what is its
period on the moon’s surface?
C1M.10 The critical density of the universe ρc is the density
that the universe must have for the gravitational attraction between its parts to be strong enough to prevent it
from expanding forever. This density must depend on the
Hubble constant H, which specifies the universe’s current
expansion rate (as a fractional expansion per unit time, so
its units are 1/s). It might also depend on the speed of light
c, which in combination with H tells us the radius of the
universe we currently can receive light from, and thus how
much of the universe might contribute to the attraction.
(a) What is a third quantity that plausibly appears in this
formula and why?
(b) Up to a unitless constant, what is the formula for the
universe’s critical density ρc?
(c) Ignoring the unitless constant, what is the critical density for our universe? (H = 2.28 × 10–18 s–1)
Chapter C1
16
The Art of Model Building
Derivations
C1D.1 In this problem, you will prove an important result
about the calculation of uncertainties.
(a) Let a and b be quantities with small errors δa and δb
respectively. The error in f = ab is then
δ f = (a + δ a)(b + δ b) − ab
(C1.9)
Show that if δa << a and δb << b, then
δ f δ a ___
δb
__ ≈ ___
+
a
f
b
(C1.10)
Therefore, the fractional (and thus the percent) error in f
is approximately δa/a or δb/b, whichever is larger. (The
statistical version of this argument that applies if we do
not know the exact values of δa and δb but know they are
distributed according to a bell curve makes the domination of the larger ratio even more extreme.)
(b) Repeat this calculation for f = a/b, and show that
although the δb/b term becomes negative in equation
C1.10, the same conclusion applies. (Using pure algebra is trickier here: you can use calculus if you prefer.)
(c) An approximation we will use often in this course is
that when an angle θ in radians is much less one, then
sin θ ≈ θ and tan θ ≈ θ. How large must θ be for these
approximations to be inaccurate by more than 1%?
(d) Show that if f = sin θ and f = tan θ, then δf/f ≈ δθ/θ for
sufficiently small angles.
Rich-Context
C1R.1 (Practice with units.) Estimate the total mass of
the earth’s atmosphere. (There are a number of ways to
do this, but one of the most accurate involves noting that
atmospheric pressure is the force that the air exerts on a
square meter of surface, and the force in newtons that the
atmosphere exerts on a square meter of ground is equal to
the weight mg of a column of air above that square meter,
where m is the mass of the column, and g is the gravitational field strength in m/s2.)
C1R.2 Working in groups, make a list of at least ten questions of practical importance in peoples’ lives that cannot
be answered scientifically (at least at present). Discuss
whether it might be possible in the future to address these
questions scientifically, or whether at least some of the
questions cannot even in principle be addressed scientifically according to the definition of “science” presented in
this chapter. If you believe that certain questions cannot be
addressed scientifically even in principle, is it worth studying or thinking about such questions at all? If you b
­ elieve
that all questions can be answered scientifically, then discuss how you would prove that assertion scientifically.
C1R.3 Suppose you are standing on a southeast-facing
beach on the Hawaiian island Kauai on a clear day. Can
you see the top of Mauna Kea on Hawaii (the Big Island)?
(Assume that the air between you and Mauna Kea is perfectly transparent. You will have to look up some information on the Internet to solve this problem.)
C1R.4 Suppose you are floating in a boat on the Bay of
Bengal on a clear day. Can you see Mt. Everest from your
boat? (Assume that the air between you and Mt. Everest is
perfectly transparent. You will have to look up some information on the Internet to solve this problem.)
C1R.5 Suppose we launch a projectile at an initial angle θ
above a flat horizontal surface. If there is no friction, the
projectile’s range D (the distance between the point where
it is fired and the point where it returns to the ground) can
only depend on θ, the projectile’s initial speed v0, its mass
m, and the earth’s gravitational field strength g. ­Assume
that the angle-dependence is a simple trigonometric function of θ or a multiple of θ, and that no unitless constants
appear in the equation. Use dimensional analysis to
“­derive” a plausible form for this equation. Then, consider
how the trigonometric function must behave when θ = 0°
and θ = 90° in order to come up with a plausible guess for
this formula.*
C1R.6 Consider a compact “bob” of mass m connected to
the end of a rigid rod with length L and negligible mass.
The rod’s other end is connected to a pivot so that the
rod and bob can swing in a vertical plane in the earth’s
gravitational field (the rod and bob therefore form a rigid
pendulum). Imagine that the bob is released from rest at a
position such that the rod makes an initial angle θ with the
vertical. The bob’s speed v as it passes through the lowest
point in its trajectory can only depend on m, L, θ, and the
earth’s gravitational field strength g.
(a) Assume that the formula for v has the form
a b c
v =KmLgf(θ)
(C1.11)
where K is a unitless constant and f(θ) is a unitless
function of the unitless variable θ. Use dimensional
analysis to determine the exponents a, b, and c.
(b) Because f(θ) is unitless, we cannot use dimensional analysis to determine it. Assuming that f(θ) is a simple trigonometric function of θ (or a multiple of θ), consider how this
function must behave at θ = 0° and θ = 180° to come up
with a plausible guess for this formula.*
*This method of examining extreme cases where you can
­intuit the right answer is called the method of extremes and
is another very useful addition to your bag of tricks.)
Answers to Exercises
C1R.7 You are investigating what appears to be a tragic
accident on the surface of Mercury. Three people were
prospecting in a rover which broke down about 30 km east
of safety in the underground base of Hermes, which lies
roughly on Mercury’s equator. Dawn was approaching
within minutes, the survivors said, so the trio set out on
foot to escape the coming sunrise (being caught by sunrise
on Mercury will kill a person within minutes, even in the
best modern spacesuit). Two made it to Hermes just as the
sun rose there, but the desiccated remains of the third was
recovered (after nightfall 88 earth days later) not far from
the rover. That prospector’s suit was punctured in many
places, but that could have been because of gases escaping
17
from the body as it roasted in the sunlight. The two others
said they had become separated from the third in the dark,
and did not want to wait because of the dawn approaching within minutes. The dead prospector’s suit electronics
were mostly fried by the long Mercurian day, but forensics
was barely able to recover a bit of data and concluded that
the suit failed 11.0 ± 0.5 h before the survivors arrived at
Hermes. On the basis of this information, you arrest the
survivors (as they are preparing to depart again to work
the very lucrative vein of rare earth metals that they had
discovered) and charge them with murder. Why? (Hint:
Look on the Internet for information about Mercury, especially with regard to its rate of rotation.)
ANSWERS TO EXERCISES
C1X.1
(See example C1.1.)
C1X.2 The free-fall time T depends only on the star’s
mass M, its initial radius R, and the universal ­gravitational
­constant G. If we hypothesize an equation of the form
T = KGIMJRk, then unit consistency requires that
( )
3 i
s = {T} = {G}i {M}j {R}k = _____
m 2 (kg)j (m)k
kg·s
From this, we quickly
_______see that i = –1/2, j = i, m = –3i =
3/2, so T = KR3/GM . Setting K = 1 and putting in the
numbers yields T on the order of 2 s, shockingly short for
such a huge object.
C2
Particles and
Interactions
Chapter Overview
Section C2.1: The Principles of Modern Mechanics
A theory of mechanics is a model of how an object’s motion is affected by its interactions with other objects. These principles express the essence of modern mechanics:
1. We can model any physical object as a set of interacting point-like particles.
2. A noninteracting particle moves at a constant speed in a straight line.
3. An interaction is a physical relationship between exactly two particles that, in the
absence of other interactions, changes the motion of each.
4. An interaction does this by transferring momentum from one to the other.
5. A macroscopic object consisting of many particles responds to external interactions as if it were a single particle located at its center of mass.
The last principle follows from the previous four, as we will see in chapter C4.
Section C2.2: Describing an Object’s Motion
We can quantify an object’s “motion” by describing its velocity v
W, which ­expresses
both an object’s speed (defined to be │ds/dt│ ≡
lim │∆s/∆t│, where ∆s is the ­distance
∆t 0
traveled in time ∆t) and its direction of motion. W
Section C2.3: Vector Operations
Velocity is an example of a vector quantity that has both a magnitude and a direction.
We can represent such quantities using arrows whose length is proportional to the
vector’s magnitude. We use the “arrow-over” notation (e.g., u
W) to distinguish ­symbols
representing vectors from symbols representing ordinary numbers. I always use the notaW
tion │u
W│ to represent the magnitude of the vector u
, which is an ordinary number.
We can construct an arrow representing the vector sum of two arbitrary arrows u
W
W
W
W
and w
by placing the tail of w
at the tip of u
; the sum is then an arrow from the tail of u
W
W
to the tip of w
. We define a vector’s negative to be an arrow with the same magniW. Finally,
tude (length) but opposite direction. We can subtract w
W from u
W by adding – w
W
W whose magnitude is │b││u
multiplying u
by a number b yields a vector bu
W│ and whose
W
direction is either the same as or opposite to u
depending on the sign of b.
Section C2.4: Momentum and Impulse
We define an object’s mass m so that the (newtonian) momentum pW it contains when
moving with velocity vW is
W
p
W = mv
(C2.2)
• Purpose: This equation expresses the total newtonian momentum p
W that an
W and mass m.
object contains in terms of that object’s velocity v
• Limitations: This equation is an approximation that is good for objects whose
speeds are much smaller than that of light. (To preserve the momentum-transfer
principle at higher speeds, we have to redefine what we mean by “velocity.”)
18
The net change in an object’s momentum during an interval of time is the vector sum
of impulses (momentum transfers) delivered by all interactions during that interval:
W = [∆p
W]A + [∆p
W]B + ⋯
∆p
(C2.3)
W (during a given time interval)
• Purpose: This equation links the net change ∆p
in the momentum that an object contains to the impulses [∆ pW ]A, [∆ pW ]B, … that
interactions A, B, … deliver during that interval.
• Limitations: This is a core formula in the momentum-transfer model, and thus
applies in all areas of physics.
Section C2.5: Force and Weight
The force an interaction exerts on an object is the rate at which it delivers momentum:
W]A _____
W]A
[dp
[∆p
WA ≡
≡
F
lim _____
∆tW0 ∆t
dt
(C2.5)
W
• Purpose: This equation defines the force F
A that interaction A exerts on an
W]A is the impulse that the interaction delivers to the object
object, where [∆p
during a sufficiently short time interval ∆t.
W]A/∆t to accurately express the rate of momen• Limitations: For the ratio [∆p
tum flow, ∆t must be small enough that neither the direction nor the magnitude of F
WA changes significantly during the interval.
• Note: The SI unit of force is the newton, where 1 N = 1 kg·m/s2.
In physics, mass and weight are distinct concepts. Mass is an ordinary number (in
kilograms) expressing an object’s reluctance to change its velocity when receiving a
W
given impulse. An object’s weight F
g is the gravitational force vector (in newtons) an
object experiences at a certain point in space. Experimentally, though, we find that
W
W
F
g = mg
(C2.6)
• Purpose: This equation describes the relationship between an object’s mass
W
W is the
m and its weight F
g at a given point in space near a massive object: g
­gravitational field vector at that point in space.
• Limitations: This equation technically is an approximation that is good when
an object is moving much slower than the speed of light.
• Notes: Near the earth’s surface, g
W points toward the earth’s center and has a
magnitude │g
W│ = 9.8 N/kg = 9.8 m/s2.
Section C2.6: Interaction Categories
This section discusses the evidence for the existence of contact interactions between
two macroscopic objects in physical contact and contrasts these with long-range interactions that can act between separated objects. Figure C2.8 shows a useful classification scheme for macroscopic interactions (different categories are more helpful for
classifying interactions between elementary particles in the Standard Model).
Section C2.7: Momentum Transfer
This section discusses experimental evidence supporting the momentum transfer
principle of mechanics.
Macroscopic Interactions
Gravitational
Long-Range
Interactions
Electrostatic
Magnetic
Compression
Contact
Interactions
Tension
Friction
Figure C2.8
A diagram that illustrates a useful
way of categorizing macroscopic
interactions.
19
20
Chapter C2
C2.1
The principles of modern
mechanics
All matter is constructed of
point-like particles
Particles and Interactions
The Principles of Modern Mechanics
Mechanics is the area of physics that explores how physical interactions
between objects affect their motion. This is of daily concern to every person:
no one can long survive in the world without constructing mental models
about how objects move and interact. But the commonsense models people
develop from daily life, though effective in specific limited circumstances,
tend to be narrow in scope and mutually (even self-) contradictory. Physicists
have worked for centuries to sift and combine these models into a vision that
is as broad as possible while remaining self-consistent. The contemporary
picture of mechanics presented in this chapter is a big and often counterintuitive step away from commonsense models, but it has its own bold simplicity
and has proved to be both extremely powerful and broadly applicable.
The following four principles express the model’s essence:
1. We can model any object as a set of interacting point-like particles.
2. A noninteracting particle moves at a constant speed in a straight line.
3. An interaction is a physical relationship between exactly two particles
that, in the absence of other interactions, changes the motion of each.
4. An interaction does this by transferring something called momentum
from one particle to the other.
These four principles mostly restate Isaac Newton’s 1687 model of mechanics in modern language that is consistent with (and inspired by) the Standard
Model mentioned in chapter C1. In this chapter, we will take a preliminary
look at each of these principles in turn, so we can better understand the outlines of this model. A careful look is necessary, because this model’s elegant
two-particle picture seems almost hopelessly abstracted from the complex
universe of our daily experience. Because of this, our intuition can balk at
what might seem like absurd implications.
For example, consider the first statement. It seems at least a big leap (if
not downright silly) to imagine that something as solid and substantial as
(say) a rock is really a bunch of interacting point-like particles, something more
like a swarm of tiny bees. Yet this is one of the core claims of the Standard
Model, which states that all ordinary matter* is constructed of elementary
particles that have no known internal structure or volume.
You may know that atoms are constructed of protons, neutrons, and electrons. The electron is an elementary particle, and is the most important example
of a particle category that the Standard Model calls leptons. The proton, on the
other hand, is not an elementary particle, but rather is constructed of elementary
particles that the Standard Model calls quarks: specifically, two “up” quarks
and a “down” quark. Likewise, a neutron consists of two “down” quarks and
an “up” quark. The atom has a well-defined volume (in spite of being constructed of particles with no volume) because the interactions between the
atom’s quarks and leptons (in combination with the rules of quantum mechanics) arrange these particles into structures that resist being merged with similar
structures in the same volume of space. A rock’s solidity thus actually expresses
the strength of the interactions that hold these particles in relatively fixed and
spatially separated structures, which are depicted in figure C2.1.
The Standard Model describes the character of the fundamental interactions between these elementary quarks and leptons in great depth (something
outlined in more detail in appendix CA and which we will also study more
*The “ordinary matter” described by the Standard Model includes exotic forms of
matter that only exist briefly in particle accelerator experiments, but does not include
either “dark matter” or “dark energy,” which (together) comprise more than 95% of
the universe but about which we know almost nothing else.
C2.2 Describing an Object’s Motion
21
2m
2 × 10-15 m
2
× 10-10 m
Atoms
Macroscopic object
Protons, neutrons,
and electrons
2 × 10-16 m
Quarks exchanging
gluons
< 10-18 m
(Limits of the
Standard Model)
Figure C2.1
An overview of the structure of matter as imagined by the Standard Model of
particle physics.
in unit Q). But trying to understand the behavior of macroscopic objects
(that is, anything larger than an atom) in terms of the interactions between
quarks and leptons is like trying to infer the behavior of an ecosystem from
the rules that describe possible interactions between pairs of organisms: it
might be possible in principle, but is likely to be very difficult. Fortunately,
physics is much simpler than ecosystem analysis in this regard:
5. Any macroscopic object responds to external interactions as if it were a
single particle located at its center of mass.
We can model a macroscopic
object as if it were a particle!
This principle means that we can completely ignore the countless internal
interactions between an object’s elementary particles, and instead treat the
entire object as if it were itself just a simple point-like particle!
This statement is not really an independent principle: it follows from
four principles already stated. But because I will postpone the proof (and
the precise definitions of “center of mass” and “external interaction”) until
­chapter C4, we will simply treat it here as a fifth principle of modern mechanics. This principle is, however, extremely valuable: it is really what makes the
physics of macroscopic objects practical at all.
For the purposes of this chapter, the only thing we need to know about
an object’s “center of mass” is that it is a well-defined mathematical point
that we can calculate in principle, and that the center of mass of a symmetrical object (such as a spherical ball) is located at the object’s geometric center.
C2.2
Describing an Object’s Motion
Interpreting the second and third principles in the preceding list requires that
we know how to quantitatively describe a particle’s “motion.” The first step in
such a description is to carefully define what we mean by a particle’s velocity.
You probably already know that an object’s speed expresses the rate at
which the object (or more technically, its center of mass) is moving through
space. Mathematically, an object’s speed at a given instant of time is the tiny
distance ∆s the object travels during a tiny time interval divided by that
interval’s duration ∆t, evaluated in the limit that ∆t goes to zero:
| | | |
speed ≡
lim ___
∆s ≡ ___
ds
(C2.1)
∆tW0 ∆t
dt
(The triple equality means “is defined to be,” and the absolute value reminds
us that a speed is defined to be a positive number.) Note that physicists rarely
perform the limit-taking process when making practical measurements: the
The definition of speed
Chapter C2
22
Particles and Interactions
v = 65 mi/h east
(a)
speed = 65 mi/h
(b)
(c)
v = 35 mi/h east
Figure C2.2
(a) A car’s speed is a simple number. (b) We can represent the car’s velocity by an arrow that also specifies the car’s direction
of motion and (c) whose length is proportional to the car’s speed.
The definition of velocity
Newton’s first law
simple ratio ∆s/∆t is a satisfactory approximation for the object’s speed,
as long as ∆t is sufficiently short so that the object’s speed and direction
of motion do not change significantly during the interval. Indeed, a modern electronic car speedometer simply measures the time required for the
car’s wheel to turn once and displays a value equal to the wheel’s circumference divided by that interval (which at highway speeds is a reasonably short
0.06 s or so).
Velocity vW extends the concept of an object’s speed by also specifying
the object’s direction of motion. For example, a car’s speed at a given instant
of time might be 65 mi/h, but its velocity at that time might be 65 mi/h east.
As figure C2.2 illustrates, we can visually represent an object’s velocity at
an instant by an arrow whose length is proportional to the object’s speed
and whose direction indicates the object’s direction of motion at that instant.
(Note that for a rigid object like a car, we don’t have to know the precise position of its center of mass to measure its velocity. All points on a nonrotating
rigid object move together with the same speed and direction, so the velocity
of any point on such an object is the same as that of its center of mass.)
Describing an object’s “motion” therefore means specifying the v­ elocity of
the object’s center of mass as a function of time. An object’s motion “changes”
if there is a change in the numerical value of its center-of-mass velocity or its
direction (or both).
The second principle of modern mechanics asserts that “a noninteracting
particle moves in a straight line at a constant speed,” meaning that both the
numerical value and the direction of its velocity are constant. This statement,
which physicists also call Newton’s first law, boldly asserts that motion at
a constant velocity is entirely natural and requires no explanation. This was
a crazy statement when Newton first proposed it in 1687 because most of
Newton’s predecessors thought (and taught) that only rest was natural, and
that a moving object such as a flying arrow required some kind of continuing
“push” to keep it moving (even though the source of this “push” remained
elusive). Newton instead declared that constant-velocity motion is totally
natural: what requires explanation is rather the changes in the arrow’s motion
(for example, why the arrow’s trajectory bends toward the ground).
This may seem like a straightforward idea to you, but research into
human cognition about physics conclusively shows that almost everyone’s
initial commonsense understanding of motion sides with Newton’s predecessors, not with Newton. While you may already have accepted the somewhat counterintuitive idea that constant-velocity motion is natural, I can
assure you that you will find that most people who are learning physics will
persist (sometimes tenaciously) in believing that only being at rest is natural.
The third and fourth principles of modern mechanics state that an interaction between two particles changes the motion (that is, the velocity) of each
by transferring something called momentum. To fully understand the quantitative implications of these ideas, we first need to delve more deeply into the
mathematics of arrow-like quantities such as velocity.
C2.3 Vector Operations
C2.3
23
Vector Operations
“Velocity” is an example of a quantity mathematicians call a vector (from a
Latin root meaning “to carry”). “Momentum” is another such quantity. So,
in order to understand the third and fourth principles of modern mechanics,
we must learn something about how to calculate with vectors.
An arbitrary vector quantity u
W has both an (always nonnegative) numerical magnitude │u
W│ AND a direction, in contrast to an ordinary number,
which has a numerical value but no direction. In this text, a symbol with a
little arrow over it (for example, u
W or v
W) will always refer to a vector quantity,
and a symbol without an arrow (for example, ∆t or m) will always refer to an
ordinary number. Since a vector’s magnitude is an ordinary number, people
often use the same letter with and without the arrow to represent a vector
and its magnitude, respectively (for example, v
W and v for an object’s velocity and its speed, respectively). However, in one-dimensional contexts, people often also use a simple letter to refer to a vector’s component in a certain
direction (a concept I will define in chapter C3). Since a vector magnitude is
strictly nonnegative but a vector component can be negative, this notation
can be confusing. In this book, I will (unless I clearly state otherwise) reliably
W
use the notation │u
W│ for the magnitude of a vector u
and a different notation
(to be defined in chapter C3) for a signed component of u
W. Thus, the symbol
for velocity is always v
W, the symbol for speed is │v
W│, and a bare v does not
refer to anything unless I explicitly specify otherwise.
To talk about changes in a vector quantity, we must define what we mean
by “adding” and “subtracting” vectors. We can express the core geometric meaning of these operations by visually representing each vector by an
arrow whose direction specifies the vector’s direction and whose length is
proportional to the vector’s magnitude. In this representation, we construct
the arrow corresponding to the vector sum u
W + w
W of two abstract vectors u
W
and w
W by drawing the arrows representing u
W and w
W in sequence so that the
tip of u
W touches the tail of w
W; the sum is then an arrow going from the tail of
W to the tip of w
W
u
(see figure C2.3a).
W of a vector arrow u
W
We define the negative -u
to be an arrow with the
same length but the opposite direction. Figure C2.3b shows that the sum of
such arrows is the zero vector (an arrow with zero length and undefined
direction), just as the sum of an ordinary number and its negative yields zero.
W
W
Just as with ordinary numbers, we define subtracting w
from u
to be the
W
W), as shown in figure C2.3c.
same as adding the negative of w
: u
W - w
W ≡ u
W + (-w
When doing these constructions, note that we are free to move a vector
arrow around (or place a copy of the vector arrow somewhere else) as long as
the moved arrow or copy has the same direction and length as the original. A
vector in itself does not have a “location,” only a direction and a magnitude.
Two arrows that have the same direction and length therefore both represent
the same underlying vector, no matter where we might place them.
Vectors and vector notation
Vector addition
The negative of a vector
Vector subtraction
We are free to move vectors
around
-w
w
u
u
u+w
(a)
(b)
-u
u-w≡
u + (-w)
u
(c)
Figure C2.3
W
W
W
W is an arrow with zero length.
(a) The sum of vector arrows u
and w
. (b) The sum of an arrow u
and its negative -u
(c) We subtract a vector by adding its negative.
24
Chapter C2
Multiplying a vector by an
ordinary number
Finally, we can multiply a vector by a number. Abstractly, if u
W is a vecW to be a vector and b is an ordinary number, then we define their product bu
W│ ≡ │b││u
tor which has a magnitude │b u
W│ and which points in either the same
W
direction as u
(if b is positive) or the opposite direction (if b is negative). So
if we represent u
W by an arrow, then multiplying it by a number b simply
“stretches” the arrow by a factor of │b│ and also reverses it if b is negative. The
W and its magnitude │b u
W│ are equal to the product of
units of both the vector bu
the units of u
W and those of b. Note that this operation is consistent with the
operation of negation: negating a vector is the same as multiplying it by –1.
Note also that dividing a vector by b is the same as multiplying it by 1/b.
Vectors play such an important role in physics that I will devote an entire
chapter (C3) to developing techniques for numerically performing these operations. However, understanding the geometric meaning of these operations is
a crucial first step and is sufficient for now.
The following exercises provide some practice with these operations.
s
Particles and Interactions
Exercise C2X.1
Given the arrows r W and s W to the left, construct in the space to the left the sum
arrow r W + s W and the difference arrows r W - s W and s W - r W (using a ruler might
help). Do the two differences yield the same arrow?
r
Exercise C2X.2
w
u
u+w
W
W
W
W
Is vector addition commutative? That is, is u
+ w
the same as w
+ u
? Circle
one: Yes No. Defend your answer by constructing the sum w
W + u
W for the
vectors u
W and w
W shown to the left and comparing your result with the arrow
W + w
u
W shown. (Do your construction to the right and below the drawing.)
C2.4
Momentum and Impulse
We are finally in a position to define “momentum.” We find empirically that
the amount of momentum an object contains at a given instant of time is proportional to the object’s velocity vector at that instant:
The definition of a moving
object’s momentum
W ≡ mvW
p
(C2.2)
W
• Purpose: This equation expresses the total newtonian momentum p
W and mass m.
that an object contains in terms of that object’s velocity v
• Limitations: This equation is an approximation that is good for objects
whose speeds are much smaller than that of light. To preserve the
momentum-transfer principle at higher speeds, we have to redefine
what we mean by “velocity” in this equation (see unit R).
Since (as we will shortly see) an object’s mass m is a positive ordinary number
W at a given time always points
by definition, an object’s momentum vector p
in the same direction as the object’s velocity (that is, in the direction the object
is moving) and has a numerical magnitude of │p
W│= m│v
W│. Note that since
velocity and speed have the same SI units of m/s, and the SI unit of mass is
the kilogram (kg), the SI units of momentum are kg·m/s.
C2.4 Momentum and Impulse
25
W ≡ mvW as being the definition of momentum, but modern
We could take p
physics instead actually defines momentum as “the vector quantity associated
W ≡ mvW
with a particle’s motion that an interaction transfers” and interprets p
as defining an object’s mass (as the constant of proportionality between the
object’s velocity and its momentum). An object’s mass thus expresses how
reluctant it is to change velocity when it accepts a given momentum transfer.
Problem C2D.1 presents a formal and operational definition of mass consistent with this approach.
Empirically, however, we find that a macroscopic object’s mass defined
this way is almost exactly proportional to the number of protons and neutrons it contains (within about ±0.2%). So from a practical viewpoint, we can
think of an object’s mass as expressing how much “stuff” it contains.
Equation C2.2 then expresses how much momentum an object contains
when it is moving at a given velocity. However, “momentum” is more than
simply something an object contains. Our fourth principle of modern mechanics also states that momentum is something an interaction can transfer.
An analogy might help us understand the broader meaning of “momentum.” Momentum in the abstract is analogous to the concept of “money.” The
momentum a given object contains at a given time is analogous to the balance in a
given person’s bank account at a given time. Two peoples’ bank accounts “interact” if one person sends a payment order to the other: in such an interaction, the
payment amount is added to one person’s account balance and subtracted from
the other’s. This process “transfers money” from one account to the other.
W that an object
This analogy makes it clear that the momentum p
W = mv
contains and the momentum that it receives from various interactions are
related but still distinct concepts, just as an account balance and a payment
order are distinct concepts that nonetheless both fall into the general category
of representing “money.” To help keep this straight, we will give momentum
transfers a distinct name and symbol. Physicists call the amount of momentum that an object receives during an interaction the impulse delivered by that
W]A to represent the impulse
interaction. In this text, I will use the notation [∆p
that interaction A delivers to an object during a specified time interval. Read
the brackets [ ]A in this notation to mean “the contribution that interaction A
makes to” whatever the brackets enclose. This is very important, as I will use
this bracket notation in the future to represent analogous transfers of energy
and angular momentum.
Now, just as the net change in an account’s balance during a given month
is equal to the numerical sum of withdrawals and deposits, the net change
W = p
Δp
Wfinal − p
Winitial (during a given interval) in the momentum that a given
object contains is the (vector) sum of all the impulses the object has received
during that time interval:
W ]A + [∆p
W ]B + ⋯
∆pW = [∆p
(C2.3)
W (during a given time
• Purpose: This equation links the net change ∆p
interval) in the momentum that an object contains to the impulses [∆p
W]A,
W]B, … that interactions A, B, … deliver during that interval.
[∆p
• Limitations: This is a core formula in the momentum-transfer model,
and thus applies in all areas of physics.
This net change must be a vector sum because momentum is a vector quantity.
Of course, just because the money analogy suggests this formula does not
make it true. The question is, does this model match what we really observe?
This equation actually defines
an object’s mass
A financial analogy
The bracket notation [ ]A
means “the contribution that
interaction A makes to …”
An object’s change in momentum is the vector sum of the
impulses it receives
Chapter C2
26
3
p2.5
2
Particles and Interactions
p3.5
∆p3
4
p4.5
5
∆p4
p5.5
p3.5
∆p5
6
p1.5
1
p6.5
7
Figure C2.4
A thrown ball interacts gravitationally with the earth alone and receives from that interaction the same constant downward impulse during equal successive time intervals. Credit: M. Oldstone-Moore and T. Moore.
C2.5
Force and Weight
Figure C2.4 shows a time-lapse photograph of a thrown ball made by taking
a movie of the ball’s motion and merging selected movie frames into a single
photograph. The successive ball images show the ball’s positions at instants
0.10 s apart. Now, an arrow drawn between two successive images (say, the
ones marked 2 and 3) points in the direction that the ball moves during the
intervening interval and has a length │∆s│ = │v
W│∆t that is proportional to
the ball’s speed, so such an arrow can represent the ball’s velocity v
W during
that interval. Since the ball’s mass m is fixed, such an arrow can also represent
W = m v
W. Such an arrow technically most closely approxthe ball’s momentum p
imates the ball’s velocity (and thus its momentum) at the interval’s midpoint,
W 2.5 in figure C2.4 most accurately represents the
so the colored arrow labeled p
ball’s momentum at an instant halfway between the instants where the ball is
W 3.5, p
at positions 2 and 3, respectively. We can interpret p
W4.5, … similarly.
Now, note that the ball’s velocity is not constant. The third principle of
our mechanics model thus implies that the ball must be interacting with
something else. What is causing the ball to follow a curved path? You know
the answer: the ball is interacting gravitationally with the earth.
According to the fourth principle, this interaction transfers some momentum to the ball during a given time interval. We can determine how much
by comparing the ball’s initial and final momenta. The dashed arrow labeled
p
W3.5 on figure C2.4 is simply a moved copy of the colored arrow with the same
label. You can see from the way I have drawn the various arrows that
W2.5 + ∆p
W3 = p
W 3.5 ⇒ ∆p
W3 = p
W 3.5 - p
W 2.5
p
(C2.4)
W3 represents the change in the ball’s momentum
so the black arrow labeled ∆p
during the 0.10-s interval between instants t2.5 and t3.5 (which is thus centered
W4, ∆p
W5, … represent the same for later intervals.
on the instant t3). Similarly, ∆p
C2.5 Force and Weight
27
In this situation, the gravitational interaction is basically the only contributor to the ball’s change in momentum. Assuming this, we see that the
ball receives from the gravitational interaction the same downward impulse
(momentum transfer) during each interval (all the constructed impulse arrows
have the same direction and length). The gravitational interaction therefore
seems to deliver momentum to the ball at a constant rate.
We define the force that an interaction exerts on an object to be the rate at
which that interaction delivers momentum to that object:
W]A
W]A _____
[d p
[∆p
WA ≡
F
lim _____
≡
∆t
dt
W0 ∆t
(C2.5)
• Purpose: This equation defines the force F
WA that interaction A exerts on
W]A is the impulse that the interaction delivers to the
an object, where [∆p
object during a sufficiently short time interval ∆t.
W]A/∆t to accurately express the rate of
• Limitations: For the ratio [∆p
momentum flow, ∆t must be small enough that neither the direction
W
nor the magnitude of F
A changes significantly during the interval.
Force is such a useful idea that it has its own named SI unit: we define a
newton of force so that 1 N ≡ 1 kg·m/s2; that is, a 1-N force delivers 1 kg·m/s
of impulse per second. Obviously, the larger the force acting on a given object,
the more that object’s velocity changes during a given time interval, consistent
with our intuition that stronger “pushes” should have larger effects.
Having defined force, let’s return our attention to the gravitational
interaction. We call the gravitational force acting on an object its weight. We
have seen that figure C2.4 implies that the gravitational force on an object
is constant in magnitude and direction. We also find empirically that objects
dropped simultaneously from rest in the earth’s gravitational field always have
the same speed at a given instant independent of their masses (see ­figure C2.5).
W during
But if objects A and B experience the same change of velocity ∆v
WA│/│∆p
WB│ = mA│∆v
W│/mB│∆v
W│ = mA/mB for that intera given interval, then │∆p
val. Therefore, the gravitational interaction must be delivering downward
momentum to each at a rate proportional to its mass! We infer that an object’s
weight must be proportional to its mass in a given gravitational field:
F
Wg = mgW
(C2.6)
The gravitational interaction
delivers momentum at a
constant rate
Force is the rate at which
an interaction delivers
momentum
Figure C2.5
Objects dropped from rest have
the same velocities at a given
instant. Credit: D. Haley, T. Moore.
How weight is linked to mass
• Purpose: This equation describes the relationship between an object’s
mass m and its weight F
Wg at a given point in space near a massive object:
W is the gravitational field vector at that point in space.
g
• Limitations: This equation technically is an approximation that is good
when an object is moving much slower than the speed of light.
W points toward the earth’s center and
• Notes: Near the earth’s surface, g
has a magnitude of about │g
W│ = 9.8 N/kg = 9.8 m/s2.
Note that though the equation F
Wg = mgW connects weight to mass, they are
W
entirely different concepts. Weight F
g is a force, a vector whose magnitude we
express in the SI unit of newtons. Mass m is an ordinary number whose numerical value we express in the SI unit of kilograms and which describes an
object’s reluctance to change its velocity when it receives a given impulse.
Weight and mass are entirely
different concepts
28
Chapter C2
Particles and Interactions
A given object’s mass is independent of the object’s location, but the object’s
weight depends on the gravitational field in which it is immersed. For example, a given object’s weight near the moon’s surface is only 1/6 as large as its
weight when near the earth’s surface (even though the object’s mass is the
same), because the moon’s gravitational field is weaker than that of the earth.
In fact weight and mass are such completely different concepts that it
is surprising that they are related at all! Indeed, the connection implied by
W
F
g = mgW was a complete mystery until Einstein’s 1915 general theory of relativity explained it. Sadly, the explanation is beyond our scope here. We will
simply have to take this formula as summarizing what we infer from empirical observations (for example, the trajectories shown in figure C2.5).
C2.6
Momentum flows for an object
held at rest
Figure C2.6
Holding a heavy object at rest
requires that one exert an upward
force (note the strain in the arm
muscle). Credit: M. OldstoneMoore, J. Martinez, T. Moore.
Inanimate objects can exert
forces!
Interaction Categories
Equation C2.6 implies that an object near the earth’s surface always feels
a gravitational force, as │g
W │ has much the same value everywhere on the
earth’s surface (and does not vary much with at ordinary heights above that
surface). But this means that every object near the earth’s surface is constantly
receiving downward momentum due to its interaction with the earth. Now,
you may think it somewhat crazy that every object near the earth receives a
steady flow of downward momentum, particularly in situations where nothing appears to change. Imagine, for example, that you hold a heavy object at
rest in the earth’s gravitational field (see figure C2.6). According to equations
C2.6 and C2.5, the gravitational interaction between the earth and the ball
continually delivers downward momentum to the object. How can the object
possibly remain at rest? The only possible explanation is that your hand must
be delivering upward momentum to the object at the same rate. Equation
C2.3 then tells us that since the gravitational interaction is delivering downward momentum and your hand is delivering an equal amount of upward
momentum during the same time period, then the net momentum that the
object gets is
W = [∆p
W]g + [∆p
W]hand = 0
∆p
(C2.7)
because vectors with equal magnitudes and opposite directions add to zero.
You can of course feel this in your arm: your arm muscles must constantly tense to provide an upward force on the object, and you eventually
get tired from this effort, even though nothing is happening.
Now imagine putting the object on a table. We know that the object is
constantly receiving downward momentum from its gravitational interaction
with the earth, so the table must be somehow supplying an upward momentum flow (that is, an upward force) to cancel the gravitational flow, just as
you did when you held the object in your hand. How does this happen?
When you place the object on the table, it begins to move into the table as
it accumulates downward momentum from the gravitational interaction. But
atoms in both the object and table participate in spring-like interactions that
seek to keep the atoms from getting too close to each other. So as the object
atoms get pushed into the table atoms, these interatomic “springs” are compressed and start pushing back. An equilibrium is quickly achieved where
the compressed “springs” below the object deliver upward momentum to
the ball at the same rate as the object gets from gravity. This is all just like
what happens when you sit on a mattress, but on a smaller scale.
Note that the compressed interatomic springs play the same role here
as your tensed arm muscles do when you hold the object. This underlines
another aspect of the model of mechanics that Newton’s predecessors (and
C2.6 Interaction Categories
29
Figure C2.7
A time-lapse photograph showing
a cylinder sliding on a tabletop.
Credit: M. Oldstone-Moore
and T. Moore.
many untrained people today) find counterintuitive: inanimate objects (such
as tables) can exert forces just as people and animals can. Historically, this
aspect of Newton’s model of mechanics was important in breaking down a
conceptual dualism between animate and inanimate objects, thus extending
the reach of mechanical models.
We call any interaction between two objects that arises because those
objects are in physical contact a contact interaction. We call a contact interaction that prevents objects in contact from merging (such as the interaction
between the table and the ball) a compression interaction.
A metal cylinder sliding on a tabletop (see figure C2.7) illustrates a different kind of contact interaction. If the cylinder were at rest, the downward
momentum flow it would receive from its gravitational interaction with the
earth would exactly cancel the upward momentum flow it would receive
from its compression interaction with the table. Presumably, this still applies
to the sliding cylinder, but we can see there must be another interaction
involved, because the cylinder’s motion is changing: the cylinder is slowing
down, so it is clearly receiving leftward momentum as it slides rightward.
This must also be due to some kind of contact interaction with the table: an
object sliding on a cushion of air or on ice would experience less slowing.
We call any noncompression contact interaction between two objects
that opposes their relative motion a friction interaction. Again, one of the
important historical aspects of Newton’s model was that it exposed friction
as an interaction. Most of Newton’s predecessors considered friction to be an
intrinsic aspect of motion (a moving object naturally returns to rest). ­Newton’s
model (where friction is an external interaction) enables one to think about
motion in the absence of friction. This is an almost self-contradictory idea
in earlier models, but is crucial if our model is to apply to objects moving
in outer space. (Again, please note that the implicit assumptions that friction is intrinsic to motion and that constant-velocity motion is unnatural are
typically part of the commonsense models that people develop from daily
experience.)
A friction interaction between two solid surfaces (as in figure C2.7) acts
in the plane of those contacting surfaces, and may either successfully or
unsuccessfully keep the surfaces from sliding relative to each other. In the
latter case, as when a solid object moves through a liquid (such as water) or
a gas (such as air), the friction force acts opposite to the object’s velocity.
Another category of contact interactions is the tension interaction, an
interaction that seeks to keep two objects from separating. If we were to glue
a block to a table and then try to lift the block, the glue would mediate a tension interaction between block and table that opposes their separation.
We will use a more detailed classification of contact interactions in unit N,
but subdividing contact interactions into compression, friction, and tension
interactions will serve our purposes in this unit. The gravitational interaction
is the only noncontact interaction we have considered so far, but two others are worth considering. Two electrically charged objects can participate
in an attractive or repulsive electrostatic interaction, and two magnetized
A compression interaction as a
contact interaction
Friction interactions
Tension interactions
30
Chapter C2
Macroscopic Interactions
objects can participate in an attractive or repulsive magnetic interaction. We
will see in unit E that the last two are really just aspects of a more general
“electromagnetic” interaction, but for now let’s keep them separate. Since
electrostatic, magnetic, and gravitational interactions can operate even if the
objects are not in direct contact, we call these long-range interactions.
Figure C2.8 summarizes our interaction classification scheme. The
Standard Model (see appendix CA) organizes the fundamental interactions
between elementary particles into different categories. Obviously, two pointlike particles cannot ever be in “contact,” so contact interactions don’t exist.
(At the microscopic level, contact interactions between macroscopic objects
are actually complicated electrostatic interactions between charged particles
in the atoms on the objects’ surfaces.) But the scheme in figure C2.8 is more
useful for the macroscopic interactions of our daily experience.
Gravitational
Long-Range
Interactions
Electrostatic
Magnetic
Compression
Contact
Interactions
Tension
Friction
Figure C2.8
A diagram that illustrates a useful
way to categorize macroscopic
interactions.
Experimental evidence for the
fourth principle
C2.7
Particles and Interactions
Momentum Transfer
In the previous sections, we have seen that the model of modern mechanics
does indeed help us describe and understand the effects of an interaction on
a single object’s motion. But the crucial fourth principle of our model states
that interactions transfer momentum. What evidence do we have of this?
Indeed, it might seem that we have evidence to the contrary! We have
seen that the gravitational interaction between the earth and a ball delivers
momentum to the ball, so if this interaction amounts to a momentum transfer,
it should subtract the same momentum from the earth. So if the interaction
delivers downward momentum to the ball, it should deliver the negative
of downward momentum (that is, upward momentum) to the earth, which
would cause the earth to begin to move upward if it was initially at rest. But
do we sense the earth move when throwing a ball? I personally don’t.
So is the model wrong? Not necessarily. Say that the ball has a mass of
60 g = 0.06 kg. The earth has a mass of about 6 × 1024 kg. Therefore, the ratio
of the ball’s mass to the earth’s mass is about 10–26. So if the ball and earth
receive the same magnitude of momentum transfer during a given interval,
the change in the earth’s velocity will be 10–26 times smaller than the change
in the ball’s velocity. We might well not notice such a change.
Even so, we need better evidence for the fourth principle. Consider the
time-lapse photograph in figure C2.9, which shows a top view of two disks
sliding on a horizontal surface. Each disk floats on a cushion of air, so the
air and disk participate in a compression interaction that supplies upward
momentum to the disk at a rate that cancels the downward momentum flow
due to gravity. But because of the air cushion, there is no friction-creating
contact between the disk and the horizontal surface (and the disk’s contact
with the air creates very little friction). So as long as the disks do not interact
with each other, they should experience no net momentum changes and thus
move in straight lines at constant velocities, as if they were free of all interactions! The photograph seems to bear this out: before and after the collision,
the disks do seem to move in straight lines with constant speeds.
We can calculate the momentum transferred to each disk from their
brief contact interaction by calculating the change in the disk’s momentum.
Remember that an arrow that stretches between an object’s positions at the
beginning and end of an interval is a good representation of that object’s
velocity at the interval’s middle. But to draw a useful arrow representing the
disks’ momenta, we need to account for their different masses. In the case
shown, the ratio of the mass of disk B to disk A was measured to be 1.27. This
means that a momentum arrow for disk B should be 1.27 times longer than
C2.7 Momentum Transfer
31
pBf
pAf
-pAi
pBi
∆pA
pAi
Disk B
Disk A
Figure C2.9
A time-lapse photograph of two
interacting floating disks. Credit:
D. Haley, M. Oldstone-Moore.
it would be for disk A for a given velocity arrow. So I have drawn momentum arrows for disk A for an interval just before the collision and one just
after, choosing each arrow to be as long as disk A’s displacement during that
interval (see the black arrows labeled p
WAi and p
WAf). Similarly, I have drawn the
analogous momentum arrows for disk B, but I have made each 1.27 times
longer than disk B’s displacement during the corresponding interval (these
W Bi and p
W Bf). These arrows should each be proare the colored arrows labeled p
portional to the disks’ corresponding momenta at each stage.
W Af by adding -p
WAi (see the dashed
For disk A, I have subtracted p
WAi from p
WA is the change in disk A’s momentum. Since the
arrow). The black arrow ∆p
vertical compression and gravitational interactions have no net effect on the
disk’s momentum, this change in momentum must be equal to the impulse
WA = [∆p
WA]C.
delivered by the collision interaction: ∆p
If you do the same construction for disk B, you should find that collision
delivers an impulse to that disk that is equal in magnitude but opposite in direction
WB = [∆p
WB]C = -[∆p
WA]C. Therefore, the momento that delivered to disk A: ∆p
tum that has been delivered to A has indeed been subtracted from disk B
(which is equivalent to adding the negative). This is solid experimental evidence supporting the principle that interactions indeed transfer momentum.
Exercise C2X.3
(Important!) Do the analogous construction for disk B and so verify the conclusion of the last paragraph. When you are done, check the chapter’s last page.
Please note that all of the arguments in this chapter depend crucially on
the vector nature of velocity and momentum. A model where these quantities
are ordinary numbers simply would not work. Vectors are so important in physics that we will spend the entire next chapter exploring them in more depth!
Chapter C2
32
Particles and Interactions
TWO-MINUTE PROBLEMS
C2T.1 A baseball player slides into third base. Why,
according to the modern model of mechanics, does the
player eventually come to rest?
A. All moving objects naturally come to rest eventually.
B. Friction overpowers the force of the player’s motion.
C. The force of the player’s motion eventually wears out.
D. A friction interaction changes the player’s motion.
E. Other (specify).
C2T.2 A car moves backward 10 m in 2 s at a steady rate.
The car’s speed is therefore –5 m/s. T or F?
C2T.3 An object is moving at a constant velocity. This
means that an interaction must be delivering momentum
to the object at a constant nonzero rate. T or F?
C2T.4 A bicyclist rounding a curve at a constant speed is
receiving a nonzero net flow of momentum. T or F?
C2T.5 A deep space probe moving forward in space needs
to make a course correction and so fires a thruster on the
side of the probe 90° away from its direction of motion,
as shown below. This thruster, while on, exerts a constant
force on the probe perpendicular to its original direction
of motion. While the thruster is operating, which trajectory best describes the probe’s motion? (Hint: Note that the
thrust force delivers an upward impulse to the probe during every successive time interval. Consider what happens
to the ball in figure C2.4 as it receives analogous continual
downward impulses.)
Possible trajectories during thrust:
A.
B. C.
D. (straight
then curved)
Probe
Trajectory before
the thruster fires
E. Other (draw)
C2T.6 Consider the deep space probe discussed above.
After the thruster is turned off, which trajectory best
describes the probe’s subsequent motion?
Possible final trajectories (thruster off):
A.
Probe
B.
C.
D.
E.
C2T.7 A cup sitting on a table constantly receives upward
momentum from the table. T or F?
C2T.8
A human being’s weight could be 150 kg. T or F?
C2T.9 Suppose I throw a ball toward the floor. It hits the
floor and rebounds upward. What type of interaction
causes the ball to rebound?
A. Gravitational
B. Electrostatic
C. Magnetic
D. Compression
E. Friction
F. Tension
T. Something else (explain)
C2T.10 An empty floating boat interacts gravitationally
with the earth. A different interaction with something
else keeps the boat from responding to the gravitational
interaction by sinking. What is the other object that interacts with the boat? What type of interaction is involved?
(Choose one answer from each column.)
A. The water
A. A tension interaction
B. The atmosphere B. An electrostatic interaction
C. The earth
C. A friction interaction
D. The lake floor
D. A compression interaction
E. Other (specify)
E. Other (specify)
C2T.11 Suppose a 1.0-kg object traveling rightward at
1.0 m/s hits a 3.0 kg object at rest. Afterward, we observe
the lighter object to move leftward with a speed of 0.75 m/s.
What impulse did the collision interaction give the smaller
object at the expense of the larger?
A. None; the larger object was at rest and so had no
momentum to give the smaller object.
B. None; the smaller object gave an impulse to larger, not
the other way around.
C. 0.75 kg·m/s leftward.
D. 1.0 kg·m/s leftward.
E. 1.75 kg·m/s leftward.
C2T.12 Suppose a moving cart (cart A) hits an identical cart
(cart B) at rest. Cart B remains at rest after the collision, and
cart A rebounds with a speed equal to its original speed.
Cart B must have participated in some other interaction
during the collision process, T or F?
C2T.13 Suppose two identical objects traveling toward
each other with the same speed collide. According to the
momentum-transfer principle, if we observe one of the
objects to be at rest after the collision, the other object:
A. Must be at rest also.
B. Must rebound backward with its original speed.
C. Must rebound backward with twice its original speed.
D. Must continue forward with twice its original speed.
E. The process as described violates the principle.
Homework Problems
33
HOMEWORK PROBLEMS
Basic Skills
C2B.1 Suppose an object with a mass of 2.0 kg is moving
due northeast at 5.0 m/s. Some time later, we see the same
object moving at the same speed but due northwest. What
is the magnitude and direction of the impulse that the
object has received from various interactions during that
time interval? (Hint: Draw some arrows.)
C2B.2 Suppose an object with a mass of 1.0 kg is moving
due southeast at 3.0 m/s. Some time later, we see the same
object moving due northeast at the same speed. What is
the magnitude and direction of the impulse that the object
has received from various interactions during the time
interval? (Hint: Draw some arrows.)
C2B.3 Consider an object moving from points 1 to 2 to
3 in the drawing below. Assume that the colored arrows
represent the object’s momenta at times t1.5 and t2.5. Copy
the diagram and construct an arrow representing the net
impulse that the object received during this interval.
2
p2.5
3
p1.5
1
C2B.4 Consider an object moving from points 1 to 2 to
3 in the drawing below. Assume that the colored arrows
represent the object’s momenta at times t1.5 and t2.5. Copy
the diagram and construct an arrow representing the net
impulse that the object received during this interval.
3
p2.5
1
p1.5
2
C2B.5 Make a xeroxed copy of figure C2.4 (or scan it and
print a copy). Then, use a ruler to carefully onstruct the
W2 and ∆p
W6 on the diagram.
vector arrows representing ∆p
Do these arrows have the same magnitude and direction
W arrows shown?
(approximately) as the ∆p
C2B.6 A planet moves at a constant speed in a circular orbit
around the sun. Just by looking at the planet’s motion, can
we infer that it must be participating in some kind of interaction with something external? Explain.
C2B.7 Suppose I drop a 60-kg anvil from rest and from
such a height that the anvil reaches a speed of 10 m/s just
before hitting the ground. Assume the earth was at rest
before I dropped the anvil.
(a) What is the earth’s speed just before the anvil hits?
(b) How long would it take the earth to travel 1.0 µm
(about a bacterium’s width) at this speed?
C2B.8 The gravitational field strength │g
W│ on the surface of
Mars has about 38% of the value of │g
W│ on the surface of
the earth. Consider an astronaut whose mass is measured
on earth to be 55 kg. What is the astronaut’s mass on Mars?
What is the astronaut’s weight on earth and on Mars?
C2B.9 If you hold a 0.5-kg ball at rest in the earth’s gravitational field, how much downward impulse does gravitation deliver to the ball every second? How much upward
impulse must the contact interaction with your hand
deliver to the ball every second? Explain.
C2B.10 Suppose we drop a 0.145-kg baseball and a 7.0-kg
bowling ball simultaneously from rest. They both fall for
0.50 s and both reach the same speed of 4.9 m/s just before
hitting the ground.
(a) What impulse (magnitude and direction) did each ball
receive from the earth during the interval between
being released and hitting the ground?
(b) What is the rate at which each ball received momentum
as they dropped (assuming the rate is constant)?
(c) Is this rate consistent with equation C2.6 in each case?
C2B.11 A book sitting at rest on a table near the earth’s
surface receives a total downward impulse of 19.6 kg·m/s
every second from its gravitational interaction with the
earth.
(a) What is the magnitude of the gravitational force acting
on the book (that is, what is the book’s weight)?
(b) What is the book’s mass?
(c) What impulse (magnitude and direction) does the
book’s contact interaction with the table deliver to the
book every second? How do you know?
C2B.12 Objects can participate in contact interactions with
air or water as well as with solid objects (for example, the
disks supported by cushions of air in figure C2.9). A leaf or
feather falling vertically in still air will typically fall with a
constant downward velocity (we will see why in unit N).
Is such an object participating in a significant contact
interaction with the air? If so, how do you know, and how
would we classify this contact interaction?
C2B.13 A magnet sticks to the side of a refrigerator. What
macroscopic interactions does it participate in? (Hints:
What keeps the magnet from merging with the refrigerator? What prevents it from sliding down the refrigerator in
response to the downward momentum it receives from its
gravitational interaction with the earth? What if the refrigerator were really slippery?)
34
Chapter C2
Particles and Interactions
Figure C2.10
A collision between two floating disks with the same mass.
Credit: D. Haley and T. Moore.
C2B.14 Suppose a 1.0-kg cart with low-friction wheels is
traveling at 1.0 m/s rightward just before colliding with
an identical cart at rest. If the collision interaction delivers
a total rightward impulse of 1.5 kg·m/s to the cart at rest,
what is the velocity (magnitude and direction) of the originally moving cart after the collision is over? (Hint: Draw
some arrows.)
C2B.15 Suppose a 1.0-kg cart with low-friction wheels is
traveling at 1.0 m/s rightward just before it collides with a
similar 2.0-kg cart at rest. Just after the collision, the more
massive cart is observed to be moving rightward with a
speed of 2/3 m/s.
(a) What impulse was delivered to the massive cart?
(b) What impulse was delivered to the light cart?
(c) What is the light cart’s final momentum?
(d) What is that cart’s final velocity after the collision?
Modeling
C2M.1 Figure C2.10 shows a time-lapse photograph of
another collision between two floating disks. In this case,
the two disks have the same mass. Make a photocopy
of this diagram (or scan and print it) and then construct
arrows that show that the fourth principle of mechanics
is consistent with this photo. Carefully compare both the
magnitude and direction of the impulses delivered to each
disk by the collision. [Hints: Create a magnified image if
you can. Draw arrows from pentagon center to pentagon
center (you can skip one or two intervening images to get
bigger arrows). Use images just before and just after the
collision, but do not use the image where the disks touch.]
C2M.2 Figure C2.11 shows a time-lapse photograph of
another collision between two floating disks. Make a photocopy of this diagram (or scan and print it) and then construct arrows that represent each disk’s change in velocity.
Then, use the momentum-transfer principle to infer the
Figure C2.11
The disk on the right in this collision has a larger mass than
that of the other. Credit: D. Haley and T. Moore.
ratio between the two disks’ masses in this situation. (See
problem C2M.1 for some helpful hints.)
C2M.3 Suppose that a cart with mass m and low-friction
wheels is moving to the right with an initial speed │v
W0│ just
before it hits a cart with mass M at rest. After the collision, the first cart rebounds to the left with a speed of _35│
v
W0│
and the other cart moves to the right with a speed of
_ 2 │
v
W0│. Assume that each cart receives zero net momentum
5
from any external interactions (such as gravitational and
contact interactions) other than their collision interaction.
(a) What impulses did the collision interaction deliver to
each cart? Express the impulses’ directions as “left” or
W 0│.
“right” and their magnitudes as multiples of m│v
(Hint: Draw some momentum arrows.)
(b) Use this information to calculate M as a multiple of m.
C2M.4 Suppose a cart with mass m and low-friction wheels
W 0│ just before
is moving to the right at an initial speed of │v
it hits a cart with mass 2m. After the collision, the first cart
rebounds to the left with a speed of _13 │
v
W0│. Assume each
cart receives zero net momentum from any external interactions (such as gravitational and contact interactions)
other than their collision interaction.
(a) What impulses did the collision interaction deliver to
each cart? Express the impulses’ directions as “left” or
W 0│.
“right” and their magnitudes as multiples of m│v
(Hint: Draw some momentum arrows.)
W (express
(b) From this, infer the massive cart’s final velocity v
its magnitude in terms of │v
W0│ and its direction as being
“left” or “right”).
C2M.5 A helium atom with mass m initially moving at a
speed of │v
W0│ in a certain direction collides with another
helium atom moving with the same speed in the exact
opposite direction. After the collision, we observe the first
helium atom to move at a right angle to its initial direction of motion with a speed of _ 34 │
v
W0│. Assume this process
Homework Problems
35
happens so rapidly that gravity does not have enough
time to change either atom’s momentum significantly.
(a) Draw initial and final momentum arrows for the first
atom and infer from your drawing the magnitude and
qualitative direction of the impulse delivered to each
atom (express the magnitude as a multiple of m│v
W0│).
(b) Infer from your drawing the magnitude and qualitative direction of the other helium atom’s final velocity
W2 (express its magnitude in terms of│v
W 0│).
v
C2M.6 A helium atom with mass m initially moving at a
speed of │v
W0│ in a certain direction collides with an oxygen
atom of mass 4m at rest. After the collision, the helium
atom is observed to move
_ at a right angle with its initial
W 0│. Assume this process hapmotion at a speed of
_ 35 │v
pens so rapidly that gravity does not have enough time to
change either atom’s momentum significantly.
(a) Draw initial and final momentum arrows for the first
atom and infer from your drawing the magnitude and
qualitative direction of the impulse delivered to each
atom (express the magnitude as a multiple of m│v
W0│).
(b) Infer from your drawing the magnitude and qualitative direction of the oxygen atom’s final velocity v
W2
(express its magnitude in terms of │v
W0│).
Derivation
C2D.1 An operational definition defines a physical quantity by describing a procedure for measuring that quantity.
Operational definitions are useful in physics because they
firmly anchor quantities to empirical reality, avoiding the
potential vagueness of verbal definitions. This problem
describes an operational definition of mass based on the
momentum-transfer principle.
Suppose we have an object of known mass m1 (for
example, the U.S. copy of the reference kilogram kept
at the National Institute of Standards and Technology
in Boulder, Colorado) and an object whose mass m2 we
would like to measure. To determine the mass of the latter, we would like to give it a known impulse and see how
much its velocity changes. We can do this as follows. Imagine that we set things up so the two objects participate in
a repulsive interaction with each other (perhaps through
a compressed spring between them), but do not interact
significantly with anything else. We release the object from
rest, allow them to spring apart, and then at the same later
instant of time, we measure their speeds │v
W1│ and │v
W2│.
­Figure C2.12 illustrates the procedure.
(a) Argue that if momentum is “a vector quantity transferred by an interaction” and we assume an object at
rest has zero momentum, then the magnitudes of the
objects’ final momenta must be the same.
W, where m
(b) Assume that an object’s momentum p
W = mv
W is its velocity. Given these
is the object’s mass and v
assumptions, show that in the experiment in figure
C2.12, the mass of the second object must be
│v
W 1│
m2 ≡ m1 ____
│v
W 2│
(C2.8)
Spring
m2
m1
(Objects held at rest)
(a)
v1
(b)
v2
(Objects have been released)
Figure C2.12
How to measure the mass m2. (We must measure │vW1│ and │vW2│
at the same instant.)
We can therefore take the procedure described in
figure C2.12 in combination with equation C2.8 as
­
providing an operational definition of m2 in terms of m1.
This definition of mass is consistent with the concept
W ≡ mv
W.
of momentum transfer and the idea that p
W associated with a
(c) But what if “the vector quantity p
particle’s motion that an interaction transfers” is not
W? Let’s think about the possibilities. The
the same as mv
concept of mass is most useful if its value for a given
object is a fixed property of that object, independent
W should be directly proof the object’s velocity. Also, p
portional to that mass (if not, then we could change an
object’s total momentum simply by mentally dividW to have the
ing it into two parts!). Finally, we want p
W and go to zero when v
same direction as v
W goes to zero.
The most general definition of momentum consistent
W), where µ is the
with these requirements is p
W = µ(γ v
object’s “true” mass (not necessarily the same as the
mass m delivered by the definition given by equation
C2.8) and γ is some function of the object’s speed │v
W│.
If this is true, then show that equation C2.8 delivers
a mass m2 for object 2 that depends on the objects’
final speeds (which in turn depend on the strength of
the spring we use). Therefore, we can experimentally
test the validity of our assumptions by checking as to
whether our value of m2 is independent of the strength
of the spring we use in the experiment.
(d) We observe exactly this kind of problem when │v
W1│
and │v
W2│ become substantial fractions of the speed of
light. As we will see in unit R, an object’s
momentum
__________
|
W
W
W
is really p = µ(γ v), where γ ≡ 1/ 1 - v /c|2 and c is
the speed of light. Show that if this is true, we should
replace equation C2.8 with
___________
2
│v
W1│/ 1 - │v
W1 /c│
__________________
___________
m2 ≡ m1
2
│v
W2│/1 - │v
W2 /c│
(C2.9)
to make m2 equal to the “true mass” µ2 (assuming that
m1 ≡ µ1) independent of the speeds │v
W1│ and │v
W2│.
(e) By what percentage would equations C2.8 and C2.9
disagree if │v
W1│ = 0.002c and │v
W2│ = 0.001c? (The latter
is 300 km/s, much faster than any macroscopic human
artifact has ever traveled.)
36
Chapter C2
Particles and Interactions
50 cm
Figure C2.13
A time-lapse photograph of a thrown ball. (The time interval between successive images is 0.10 s.) The plane of the
ball’s trajectory is about 15 cm in front of the wall on which the marks separated by 50 cm were placed, and the
­camera was about 3.0 m from the wall. Credit: M. Oldstone-Moore and T. Moore.
Rich-Context
C2R.1 Figure C2.13 is a copy of figure C2.4. Make a photocopy (or scan and print a copy) that you can work on and
hand in when you are done. Use the length scale on the
photograph and the fact that ∆t = 0.10 s between images
to determine the numerical value of the gravitational field
strength │g
W│, and estimate the uncertainty in this value.
[Hints: This problem presents a number of puzzles to
resolve. Talk with your partners about how to resolve each.
(1) We don’t know the ball’s mass. How do we deal with
this? I recommend using equations C2.2, C2.3, C2.5, and
W using only the ball’s
C2.6 to show that we can calculate g
velocity change during a given ∆t. We don’t need the mass.
(2) How can we construct arrows that represent such velocity changes? (3) How can we determine a scale for converting velocity arrow lengths on the photograph to actual
velocity magnitudes? This is complicated by the fact noted
in the caption that the marks on the wall in the photograph’s background are about 5% further from the camera
than the ball is, so the 50-cm distance on the wall is about
5% smaller on the photograph than it would be if the wall
and ball were in the same plane. (4) How can we estimate
the uncertainty in the result? One straightforward way to
do this is to construct several velocity change arrows and
W │ for each, noting the range of values we get.
calculate │g
­Better yet, agree with some friends to work independently
on the same points on the photo, and compare results. At
the end, state the value of │g
W│ in the form n ± m (where n and
m are numbers), which specifies a range within which you
are confident that the real value of │g
W│ must lie.]
C2R.2 Each part of this problem describes an object in a
specific physical context in which it interacts with other
objects. In each case, use the interaction categories to list
the ways the object interacts with its surroundings; and
for each listed interaction, state the other object involved.
Remember that an interaction, if unopposed, will act to
change the object’s momentum and thus its velocity, but
two opposed interactions may cancel each other’s effect on
the velocity. (Some of these are challenging!)
(a) A person sits in a chair.
(b) A leaf falls from a tree. (Consider the leaf after it has
left the tree but before it hits the ground.)
(c) A magnet floats at rest above a piece of superconducting metal (see figure C2.14).
(d) A magnet sticks to the side of a refrigerator.
(e) An electrically charged ball hanging from a thread is
pulled away from hanging vertically by a charged comb.
(f) (Challenging!) A child hangs on to a playground merrygo-round that is rotating so rapidly that the child is
­suspended by his or her hands above the ground. (Hint:
If we ignore air friction, there are only two interactions
involved here.)
(continues)
Answers to Exercises
37
object’s motion: All processes internal to the object can
be ignored. If this is so, what interaction increases the
car’s speed? Would the acceleration be possible if the
road were very slippery?)
Figure C2.14
A magnet floating above a superconducting dish.
Credit: © Lawrence Manning/Corbis
(g) (Challenging!) A car accelerates down a road. (Hints:
One of the implications of the fifth principle in this
chapter is that only external interactions can affect an
C2R.3 Perhaps you have felt a garden hose exert a backward force on your hand when you are using a high-­
pressure nozzle that creates a stream of water moving at a
high speed. How strong should this force be?
Answer this question by roughly estimating how long
it would take the water coming out of a typical high-speed
garden-hose nozzle to fill up a 2-qt jar (1 qt ≈ 1 liter ≈ 1 kg
of water). Also guess the water’s speed in meters per second
(perhaps by estimating how long it takes the water droplets
to move across some familiar distance). Use your estimates
to calculate roughly the magnitude of the force that the contact interaction between the water and nozzle must exert on
the outgoing water. Explain carefully why this is also the
magnitude of the horizontal force your hand must exert on
the nozzle to hold it at rest and pointing horizontally. Does
your answer seem reasonable in your experience? Note that
4.45 N = 1 lb, a unit of force you may be more familiar with.
(Note that a pound is a unit of force, not mass.)
ANSWERS TO EXERCISES
C2X.1
Here are the constructions requested:
s
-s
s
C2X.3 The construction for disk B looks as shown below.
Note that the impulse that disk B receives is indeed equal in
magnitude and opposite in direction to the impulse disk A
receives, so the impulse disk A gains is subtracted from
disk B, consistent with the idea that the collision interaction transfers momentum.
s-r
r-s
r
-r
r+s
-pBi
Note that the two differences yield opposite arrows.
C2X.2 The lower pair of arrows in the drawing below
W
W
show how we would construct the reversed sum w
+ u
:
∆pB
w
pBi
pBf
pAf
-pAi
∆pA
pAi
u
u+w
Disk B
u
w
So it is clear that constructing the reversed sum yields
exactly the same arrow as the forward sum. So yes, vector
addition is commutative.
Disk A
C3
Vectors
Chapter Overview
Section C3.1: Introduction
Vectors are extremely important in physics. The goal of this chapter is to discuss how
we can represent vectors by a set of numbers and use that representation to mathematically perform the vector operations described in chapter C2.
Section C3.2: Reference Frames
The first step is to define a reference frame, the functional equivalent of a rigid cubical
lattice superimposed on space. A frame has an origin and x, y, z coordinate axes parallel to the three lattice directions. We may freely choose (1) what a frame is attached
to, (2) how it is oriented, (3) the position of its origin, and (4) the positive directions of
its axes, but by convention (unless otherwise stated), we attach frames to the earth’s
surface in standard orientation (where the +x, +y, and +z directions point east,
north, and up). Even for reference frames not attached to the earth this way, we d
­ efine
the axis directions so that they are right-handed (see the chapter for a definition).
Section C3.3: Displacement Vectors
The most basic type of vector is a displacement vector, which carries us from one
­position in space to another. This section discusses how we can represent any disW
placement D
by three components Dx, Dy, and Dz, which we can present in a bracketed
vertical list called a column vector. A position vector r
W is a special kind of displacement vector that specifies the displacement between a reference frame’s origin and a
certain lattice position. Using diagrams and the definitions of the vector operations,
we discover how to calculate the components of the sum, the negative, the difference,
and numerical multiples of displacements (see equations C3.9–C3.12 in the following
section). The three-dimensional Pythagorean theorem also tells us how to calculate a
displacement’s magnitude (see equation C3.13 on the next page).
Section C3.4: Arbitrary Vectors
We define all other vectors by analogy to displacements, even when the vectors are
abstract physical ideas with no connection to displacements in space. So in general:
W
W
if c W = u
+ w
,
W,
if c W = -u
W
W
- w
,
if c W = u
38
cx
ux
wx
u
x + wx
then cy = u
y + w
y ≡ u
y + wy
[ cz ] [ uz ] [ wz ] [ uz + wz ]
(C3.9)
-u
cx
ux
x
then cy = - u
y ≡ -u
y
[ cz ]
[ uz ] [
-uz ]
(C3.10)
cx
u
ux
wx
x - wx
y - wy
then cy = u
y - w
y ≡ u
[ cz ] [ uz ] [ wz ] [
uz - wz ]
(C3.11)
bu
ux
cx
x
W, then cy = b u
if c W = bu
y ≡ bu
y
[ cz ] [ uz ] [
buz ]
(C3.12)
• Purpose: Equations C3.9–C3.12 describe how to calculate the components of
the sum, negative, and difference of vectors as well as the product of a vecW
tor and a number. In the above: u
W and w
are arbitrary vectors; b is an arbitrary
­number; c W is the result of the defined operation; cx, cy, and cz are the components
W
of c
W; ux, uy, and uz are the components of u
; and so on.
• Limitations: These are precise mathematical definitions.
___________
2
│u W │ ≡
u
x + u 2y + u 2z
(C3.13)
• Purpose: This equation describes how to calculate the magnitude │u W │ of an
arbitrary vector u
W in terms of its components u x , u y, and u z.
• Limitations: This is a precise mathematical definition.
Section C3.5: Seven Rules to Remember
Beginners often forget the following rules about vectors (see the section for details):
1.
2.
3.
4.
5.
6.
7.
You can’t set a vector equal to a number (except, by convention, zero).
Vector components are numbers (not vectors).
Component values depend on one’s choice of reference frame.
Vectors (and vector components) have consistent units.
Vector magnitudes are always positive.
The magnitude of a sum of two vectors is not the sum of their magnitudes.
You can’t divide by a vector (or, at present, multiply two vectors).
Section C3.6: Vectors in Two Dimensions
y
In physical situations where all vectors of interest lie on a plane, we can describe vectors by their magnitude and one direction angle from some reference direction. The
section describes how to translate between the component and magnitude/direction
languages using basic trigonometry. In particular, for the vector shown in figure C3.8,
we can convert from the magnitude/direction language to components as follows:
│ux│ = │u
W│ cos θ or │ux│ = │u
W│sin ϕ
(C3.15a)
│uy│ = │u
W│ sin θ or │uy│ = │u
W│ cos ϕ
(C3.15b)
One can determine the signs of ux and uy by imagining u
W to be a displacement and
imagining which direction you would have to walk along each axis to get from the
W
tail to the tip of u
. To convert from components to magnitude/direction, we can use
│u
W│ =
_______
u 2 + u 2
x
u
uy
ψ
x
θ
ux
Figure C3.8
A vector uW in two dimensions.
(C3.17a)
y
u
u
θ = tan-1 __y or ϕ = tan-1 __x
ux
uy
| |
ϕ
| |
(C3.17b)
The section also discusses why it is advantageous to express directions in terms of
angles that are smaller than 90°.
Section C3.7: Vectors in One Dimension
In situations where all vectors of interest lie on a line, we can replace a vector equaW becomes simply px = mvx).
tion by a single component equation (for example, pW = mv
In such situations, many physics books use the unadorned symbol u as shorthand for a vector component ux (which can be positive or negative) but also commonly
use the same symbol as a shorthand for │u
W│ (which cannot be negative). Because of
the possibility for confusion, I will never in this text use the unadorned symbol u as
shorthand for a vector component like ux . I urge you to do likewise.
39
40
Chapter C3
C3.1
Vectors are part of the core
­language of physics
Freedom in defining a
­reference frame
Conventions for defining a
­reference frame
Introduction
In Il Saggiatore (“The Assayer”, 1623), Galileo wrote*: “Philosophy is written in this great book (by which I mean the universe) which stands always
open to our view, but it cannot be understood unless one first learns how to
comprehend the language and interpret the symbols in which it is written.”
In contemporary models of physics, the foundation of this language and its
symbols are (1) vector quantities and (2) calculus. Without understanding
these elements, as Galileo put it, “it is not humanly possible to comprehend
even one word of it; without these, one wanders in a dark labyrinth.”
Our focus in this chapter is on vectors. We found in chapter C2 that we
could not even begin to talk about modern models of mechanics without
introducing vector quantities and operations, and the geometric approach
introduced there was crucial for developing a qualitative understanding of
vector concepts. However, to go forward, we must learn how to calculate
with vectors both algebraically and numerically. In this chapter, we will see
that we can represent any vector quantity by a set of numerical quantities we
call “components,” and that we can use this representation to mathematically perform the vector operations described in chapter C2.
C3.2
The first step: define a
reference frame
Vectors
Reference Frames
The first step in defining a numerical representation for vectors is to set up a
reference frame. A straightforward way to define a reference frame is to construct a cubical lattice using straight, rigid measuring rods (see figure C3.1).
We arbitrarily choose one lattice intersection to be the frame’s origin, and we
call the three mutually perpendicular lines of lattice rods going through the
origin the frames x, y, and z axes. We also arbitrarily choose a direction along
each axis to correspond to that axis’s “positive” direction, thus defining the
+x, +y, and +z directions.
We have considerable freedom in setting up reference frames. We can
1.
2.
3.
4.
Attach a frame to any object we please,
Orient the frame in any way we like,
Choose any origin point we like, and
Choose which is to be the positive side of any axis.
We have these freedoms because a reference frame is a human creation we
superimpose on the universe to help us measure things, not something that
exists independently of us.
In practice in physics, we follow certain conventions that limit our freedom but make things easier. (1) We will discuss the physical implications
of attaching frames to different kinds of objects (including moving objects)
later, but for now (unless explicitly stated otherwise) we will assume that a
frame is attached to the earth’s surface. (2) No matter how we orient a frame,
physicists conventionally define its positive axis directions to be right-handed
in the sense that if you point your right index finger in the direction of the
+x direction and your second finger in the +y direction, your right thumb
points in the +z direction, as shown in figure C3.2. (Mathematicians do not
always follow this convention.) (3) A frame attached to the earth’s surface
will be right-handed if the +x, +y, and +z directions point east, north, and
up, respectively. While other orientations are acceptable, we say that a frame
whose axes are so oriented is in standard orientation on the earth’s surface.
*Translation from Misner, et al., Gravitation, San Francisco: Freeman, 1973, p. 304.
C3.3 Displacement Vectors
41
z
z
P
rP
+2 m
O
O
y
y
+4 m
x
x
+3 m
Figure C3.1
Figure C3.2
Figure C3.3
A straightforward way to define a
reference frame is to construct a
cubical lattice in space using rigid
measuring rods.
To use a reference frame, we must
define an origin point O and positive
directions for the axes going through
the origin (conventionally using the
right-hand rule shown).
Once we have set up a reference frame,
we can locate any point P by measuring
how far, and in what direction, we have
to travel along each axis direction to get
from the origin to P.
When you write a problem solution, be sure to make your choice of
frame orientation, axis directions, and origin clear to your reader, especially if
you elect to violate any of the conventions just stated. For example, a given
problem may be simpler to solve if you choose the +x direction to be downward. It is fine to do this; just make what you are doing clear.
Once we have defined a reference frame, we can locate any object’s position P
in that frame by counting along the measuring rods how far and in which
direction we have to travel parallel to each axis direction to get from the
­origin to point P. For example, in the case shown in figure C3.3 (assuming we
constructed our lattice using 1-m measuring rods) we have to travel 4 meters
in the +x direction, 3 meters in the +y direction, and 2 meters in the +z
direction to get from O to P. An ordered list of numbers [+4 m, +3 m, +2 m]
therefore uniquely specifies the point P’s location in our frame. We call these
three numbers P’s x, y, and z coordinates in that frame. The point is that we
can use a reference frame to quantify an object’s position in terms of numbers.
However, note that constructing a literal cubical lattice in space is usually quite impractical. A practical reference frame is a scheme for assigning
coordinates to positions that is functionally equivalent to using a cubical lattice. For example, air-traffic controllers assign coordinates to airplanes by
broadcasting radar signals from the control tower. The time delay and direction of a reflected signal received from a plane fixes that plane’s distance and
direction relative to the tower. We can then use trigonometry to calculate the
position coordinates we would have gotten if we had used a literal cubical
lattice. This scheme thus effectively sets up an intangible lattice in space that
is functionally equivalent to a cubical lattice. Since any reference frame must
deliver the same results as a cubical lattice, though, the latter (even if impractical) remains a useful way to visualize a reference frame and what it does.
C3.3
Practical reference frames
Displacement Vectors
As figure C3.3 indicates, we can also specify point P’s position using a position
vector r W P whose magnitude and direction state the distance and the direction
(respectively) we must travel to get to P from the origin O. Now, we can say
Position vectors
Chapter C3
42
Vectors
z
Q
∆r
rQ
P
rP
+2 m
O
Figure C3.4
A displacement ∆r W that carries us to point Q
(a displacement r W Q from the origin) from P (a
displacement r W P from the origin).
y
+4 m
x
+3 m
that an ordered list of P’s coordinates xP, yP, and zP, and P’s position vector r W P
are equivalent representations of P’s position because, given one representation and the reference frame, we can reconstruct the other. For example, if we
know the vector r W P (that is, the distance and direction P is from the origin),
then we can locate P in the frame’s lattice and figure out how far and in what
direction we have to travel along the lattice axes to get from O to P. Similarly,
we can use P’s components to locate P in the lattice relative to O, and then
draw the vector r W P that stretches from O to P.
The following expresses the equivalence of these representations:
Representing a position vector
by a “column vector”
xP
+4 m
r WP = yP = +3
m
[ zP ] [
+2 m ]
(C3.1)
We call the bracketed, vertically ordered list of P’s coordinates xP, yP, and zP
appearing here a column-vector representation of the point’s position­
vector r W P. Remember that this ordered list is, in essence, a sequence of instructions about how to get from O to P in our chosen frame: “go 4 meters in our
frame’s +x ­direction, then 3 meters in the +y direction, and finally 2 meters
in the +z direction.”
Analogously, we can represent the position vector of point Q relative to
the frame’s origin in figure C3.4 by the column vector
xQ
+1 m
r WQ = yQ = +3
m
[ zQ ] [ +4 m ]
Definition of a
displacement vector
The components of
a displacement vector
(C3.2)
(Check to make sure this is correct.)
Now, a position vector is a special case of a displacement vector, which
we define to be any vector that carries us from one point in space to another.
A position vector specifically carries us from our frame’s origin to a point,
while a general displacement carries us from one (arbitrary) point to another.
We can also represent a general displacement vector with an ordered list
of numbers. To see how, consider the displacement ∆r W shown in figure C3.4,
which carries us from point P to point Q. Just as for the position vector r W P, we
can use our frame lattice to generate a list of instructions for how to get to Q
from P: “go 3 meters in the –x direction, 0 meters in the y direction, and then
2 meters in the +z direction.” Therefore, we can represent the displacement
W by this ordered list of numbers:
∆r
Δx
−3 m
Δr W = Δy
=
0
[
Δz ] [ +2 m ]
(C3.3)
C3.3 Displacement Vectors
43
We call this list of three numbers the displacement’s components. In ­general,
W
the components Dx, Dy, and Dz of an arbitrary displacement vector D
are
three signed numbers that specify how far and in what direction we have to
go along each axis direction in a given frame to reconstruct the displacement.
We can use the three-dimensional Pythagorean theorem to calculate the
length (magnitude) of a displacement vector from its components:
_____________
W
│D
│=
D 2x + D y2 + D 2z
(C3.4)
We can also use components to calculate a vector sum. Note, for example, that r W Q in figure C3.4 is the vector sum of r W P and ∆r W, according to the definition of the vector sum stated in chapter C2. That definition is particularly
natural for displacements: if you go from O to P along vector r WP, and then
from P to Q along vector ∆r W, you end up at the same place (point Q) that you
would have if you had gone straight from O to Q along vector r W Q.
W in this case,
To determine the components of the vector sum r WQ = r WP + ∆r
we need only to add the corresponding components of r W P and ∆r W:
−3 m
1m
4m
(4
− 3) m
3 m = r WQ (!)
3 m +
(3
r WP + Δr W =
0 m ≡
+ 0) m =
[ 2 m ] [ 2 m ] [ (2 + 2) m ] [ 4 m ]
The magnitude of
a displacement vector
(C3.5)
We now have a numerical method for adding displacement vectors!
Negating a displacement vector is also easy. For example, consider the
vector ∆r W from P to Q in figure C3.4, and recall that the list of instructions
implied by its components are “go 3 meters in the -x direction, no distance
in the y direction, and 2 meters in the +z direction.” To go the opposite disW (from Q back to P), the instructions should clearly be “go
placement -∆r
3 meters in the +x direction, no distance in the y direction and 2 meters in the
W are simply the negatives of
-z direction.” Therefore, the components of -∆r
the components of ∆r W:
+3
m
−Δx
−(−3
m)
−Δr W =
=
=
−Δy
0m
−0 m
[ −2 m ] [ −(+2 m) ] [
−Δz ]
(C3.6)
Therefore, we can negate (reverse) a displacement by negating its components. Note
also that the sum of a vector and its negative amounts to displacing a certain
distance in one direction and then back, for a net displacement of zero.
With numerical methods for vector addition and negation, a numerical
method for subtraction becomes easy. For example, note (algebraically) that
if r W Q = r W P + ΔrW, then rW Q − rW P = rW P + ΔrW − rW P = ΔrW + rW P − rW P = ΔrW, since rW P − rW P
is the same as no displacement. Therefore, the displacement ΔrWin figure C3.4
should correspond to the vector difference rWQ − rWP (hence, the symbol ΔrW).
Exercise C3X.1
Show that if you subtract the components of r W P from the components of r W Q,
you indeed get the components of Δr W.
W
W
Now consider an arbitrary displacement D
and define D
2 such that
bD
x
W2 ≡ bDy
D
[
bDz ]
(C3.7)
W
where b is a unitless number and Dx, Dy, and Dz are the components of D
in
the x, y, and z directions, respectively. This represents a list of instructions
The product of a vector and
an ordinary number
44
Chapter C3
Vectors
W
W
for reconstructing D
2 that is the same as that for reconstructing D
except
│
│
that each step is larger by the unitless factor b and is reversed if b is negative.
If b is positive, then D
W2 should point in the same direction as D
W, because the
reconstruction steps maintain their relative proportions (for example, stepping 2 meters east and then 2 meters north carries us in the same direction
W
as stepping 4 meters east and then 4 meters north). If b is negative, D
2 will be
reversed because each construction step is reversed. In both cases, note that
_____________________
_____________
W 2│ =
│D
(bD x)2 + (bD y)2 + (bD z)2 = │b│
D 2x + D 2y + D 2z = │b││D
W│ (C3.8)
W is longer than D
W
by equation C3.4, implying that bD
by the factor │b│.
W
The point is that D
2 so defined has all the characteristics of the product
W of a vector and number described in chapter C2. We conclude that to find
bD
W, simply multiply all the components of D
W
the components of the product bD
by b.
C3.4
Arbitrary Vectors
We define all other vector quantities in physics in analogy to displacement vectors, even if they represent physical quantities that have nothing to do with
displacements. We can also generalize multiplication by a number to allow
for multipliers that are not merely unitless “stretching” factors but also carry
units and so transform the vector into a new kind of vector. For example,
multiplying a displacement ∆rWin meters by 1/∆t in inverse seconds yields a
velocity ∆rW/∆t in m/s, which is a vector quantity that is not a displacement.
W
So, given a reference frame, we can quantify any vector u
by listing its
W
three components ux, uy, and uz as a bracketed column vector. We say that u
’s
direction in space is the same as that of a displacement whose components
are proportional to ux, uy, and uz. Knowing various vectors’ components, we
define the components of vector sums, inverses, differences, and the product
of a vector and number as follows:
General vector operations
in terms of coordinates
W
W
if c W = u
+ w
,
cx
ux
wx
u
x + wx
then cy = u
y + w
y ≡ u
y + wy
[ cz ] [ uz ] [ wz ] [
uz + wz ]
(C3.9)
cx
ux
-u
x
then cy = - u
y ≡ -u
y [ cz ]
[ uz ] [
-uz ]
(C3.10)
W
W
if c W = u
- w
,
u
cx
ux
wx
x - wx
y - wy
then cy = u
y - w
y ≡ u
[ cz ] [ uz ] [ wz ] [
uz - wz ]
(C3.11)
W,
if c W = bu
cx
ux
bu
x
u
c
then y = b y ≡ bu
y
[ cz ]
[ uz ] [
buz ]
(C3.12)
W,
if c W = -u
• Purpose: These equations describe how to calculate the components of
the sum, negative, and difference of vectors, and the product of a vecW
tor and a number. In the above: u
and w
W are arbitrary vectors; b is an
arbitrary number; c W is the result of the defined operation; cx, cy, and cz
are the components of c W ; and so on.
• Limitations: These are precise mathematical definitions.
C3.5 Seven Rules to Remember
45
W
Also by analogy, we calculate an arbitrary vector u
’s magnitude as follows:
___________
2
│u
W│ ≡
u
x + u 2y + u 2z
(C3.13)
A general vector’s magnitude
in terms of coordinates
• Purpose: This equation describes how to calculate the magnitude │u
W│
W
of an arbitrary vector u
in terms of its components u x , u y , and u z .
• Limitations: This is a precise mathematical definition.
With equations C3.9 through C3.13, we can numerically do the kinds of vector
calculations we did qualitatively in chapter C2.
C3.5
Seven Rules to Remember
This section lists certain aspects of vector notation that students often forget.
These errors cause a person to, at the very least, write equations that others
know are silly, and that often lead to genuine confusion and error.
Common newbie problems
with vectors
1. You can’t set a vector equal to an ordinary number (except zero).
Vectors and ordinary numbers are completely different kinds of quantities
(because vectors have direction and numbers don’t), so they cannot be equated.
W = 2 m/s” instead of something
Even so, it is easy to write something like “v
that makes sense, like “│v
W│ = 2 m/s.” Note that one should be able to replace
any symbol having an arrow over it by a column vector and still have an equaW = 2 m/s yields the clearly absurd
tion that makes sense. Trying this with v
W = 2 m/s is also absurd.
construction shown in figure C3.5, so writing v
The only exception is that one can legally write v
W = 0, which in this case
W are zero.
is conventionally taken to mean that all three components of v
2. Components are simple numbers.
W
The symbol ux for the x component of u
has no arrow over it and so stands for
a simple number. However, perhaps because a component’s sign indicates a
partial sort of directionality (movement in one direction or another along a
W
given coordinate axis), beginners sometimes write u
x, as if ux were a vector.
Errors of this type often lead to errors of the first type as well.
3. Component values depend on one’s choice of reference frame.
Component values have meaning only in the context of a given reference
frame: reorienting a frame changes the components used to represent a given
physical vector. For example, a west-going displacement with components
∆x = –5 m, ∆y = 0 m, and ∆z = 0 m in a frame in standard orientation would
have different components ∆x = 0 m, ∆y = +5 m, and ∆z = 0 m in a frame
where the +x direction points north and the +y direction points east.
4. Vectors (and vector components) have consistent units.
A vector’s components must all have the same units, which we consider the
vector’s units. These units convey important physical meaning and keeping track of them allows one to check vector equations for unit consistency.
Adding or subtracting vectors only make sense if the two vectors have the
same units, but multiplication by a number works even if the number b and
W has units that are the
vector u
W have different units. The resulting vector bu
W
product of those of b and u
.
vx
v y = 2 __
m
s
[ vz ]
Figure C3.5
This is the column-vector equivalent of vW = 2 m/s, but what can it
possibly mean?
Chapter C3
46
Vectors
5. Vector magnitudes are always positive.
u
w
c=u+w
Figure C3.6
The length of c
W = u
W + w
W is clearly
smaller than the lengths of either
W or w
W
u
, much less the sum of those
lengths.
Equation C3.13 clearly implies that │u
W│ is always nonnegative, no matter
what the signs of ux, uy, and uz might be. Using the notation │u
W│ for the magnitude will likely prevent this error. However, if you use symbol u instead
(to save writing) it is easy (for reasons discussed in section C3.7) to later consider this symbol to be a component, which can be negative. Watch for this.
6. The magnitude of a sum of vectors is not the sum of their magnitudes.
This is a subtle problem, because it seems so natural to think that if c W = u
W + w
W,
then │c W│=│u
W│+ │w
W│. However, figure C3.6 vividly exposes this statement’s
W
absurdity: u
W and w
in this particular case are each clearly longer than their vecW
W
tor sum c W . In general, │c W│≠│u
W│+│w
W│ unless u
and w
happen to be parallel.
Note that, analogously, │3│ ≠ │5│ + │-2│ even though 3 = 5 + (-2). One
reason I prefer using │u
W│ instead of the simpler symbol u for the magnitude
W
of a vector u
is that I find it easier to remember that │c W│≠│u
W│+│w
W│ (because
of the analogy noted) than to remember that c ≠ u + w when c W = u
W + w
W.
7. You can’t divide by a vector.
px
p y
px
vx
[ pz ]
p y = m v y ⇒ m = _____
?
vx
[ pz ]
[ vz ]
v
y
[ vz ]
Figure C3.7
The column-vector version of
W makes sense, but what
p
W = mv
could the column–vector equivaW possibly mean?
lent of m = p W / v
You may have noticed that we have not defined division by a vector. In spite
W if p
W. But m = p
W is absurd.
of this, it seems so natural to write m = p
W/v
W = mv
W/v
Again, you can expose this by replacing any symbols with arrows by column
W = mv
W makes sense but m = p
W /v
W becomes a column
vectors: doing this to p
vector divided by a column vector, which makes no sense (see figure C3.7).
[The right way to determine m in this case would be to take the magniW = mv
W to get │p
tude of both sides of p
W│ = m│v
W│, and then divide both sides by
the number │v
W│ to get m =│p
W│/│v
W│.]
Similarly, we have not yet defined how to multiply two vectors. Physicists commonly use two different kinds of vector products (the “dot product” and the “cross product”), but until we have defined these products, you
W or v
W 2. Again, imagining
should consider it illegal to write something like u
W w
replacing the vector symbols by column vectors nicely exposes the problem.
Exercise C3X.2
Find and correct the errors in the following statement. (Use the space above
each line for your corrections.) Then, check the chapter’s last page.
“A 2-kg particle is initially moving in the -x direction at 10 m/s and so has
W = -20 kg·m/s, with components p
momentum mv
W1x = -20, p
W1y = p
W1z = 0. It hits
a second particle initially moving in the +y direction with a momentum of
5 kg·m/s. Thus, p2x = p2z = 0, and p2y = 5. The two particles’ total momentum
is -20 + 5 = -15 kg·m/s. If after the collision the particles stick to each other
and move together with the same total momentum at a speed of v
Wf = -5 m/s,
W tot/v
Wf = 3 kg, so the second particle must have
their total mass must be mtot = p
had a mass of 1 kg.”
C3.6 Vectors in Two Dimensions
C3.6
47
Vectors in Two Dimensions
y
Situations commonly arise in physics where all vectors of interest lie on a
two-dimensional plane. In such a case, we can orient our reference frame so
that one axis is perpendicular to that plane. Vector components in this axis
direction will then be automatically zero, so we can adequately represent a
vector by its two remaining components. (However, in this text, for clarity’s
sake, I will always use three-component columns to represent vectors.)
In such situations, we can also quantitatively describe a vector in terms of
its “magnitude and direction,” just as we can express the latter in terms of a
single angle measured in the plane relative to some reference direction. This
approach provides an alternative language to the component approach for
quantifying vectors in two dimensions. In this section, we will discuss how
to translate back and forth between these languages.
For the sake of argument, suppose we have oriented our frame so all
W
vectors of interest lie in the xy plane. Consider a vector u
in this plane.
W
­Figure C3.8 displays a right triangle whose hypotenuse is u
and whose legs
are parallel to the axis directions. By the definition of components, these legs’
lengths are │ux│ and │uy│. The definitions of sine and cosine then imply that
│uy│
adj
opp _____
│u │
=
and cos θ = ____
= _____
x
sin θ = ____
hyp
hyp │u │
│u W
W │
(C3.14a)
│uy│
adj
opp _____
│u │
sin ϕ = ____
= x and cos ϕ = ____
= _____
hyp │u hyp │u W │
W │
(C3.14b)
ϕ
u
x
uy
ψ
θ
ux
Figure C3.8
W
A vector u
in two dimensions.
Finding a 2D vector’s
components from its
magnitude and direction
where “opp,” “adj,” and “hyp” are the lengths of the triangle’s leg opposite
to the angle, its leg adjacent to the angle, and its hypotenuse, respectively.
W
Therefore, if we know u
’s magnitude and either angle θ or angle ϕ, then
│ux│ = │u W │cos θ or │ux│ = │u W │sin ϕ
(C3.15a)
│uy│ = │u W │sin θ or │uy│ = │u W │cos ϕ
(C3.15b)
To determine each component’s sign, treat the vector u
W as if it were a displacement and see which direction one would have to walk along each axis direction to get from the tail of u
W to its tip. In the case in figure C3.8, we’d have to
walk in the -x direction and then the +y direction. So in that case,
W
W
ux = −│ux│ = −│u
│cos θ = −│u
│sin ϕ
(C3.16a)
uy = +│uy│ = +│u
W│sin θ = +│u
W│cos ϕ
(C3.16b)
On the other hand, if we know u
W’s components ux and uy, we can calculate its magnitude and either one of the direction angles θ or ϕ as follows:
_______
│u
W│ =
u 2x + u 2y
uy
uy
opp
tan θ = ____
= __
⇒ θ = tan-1 __
u
ux or, similarly,
x
adj
| |
| |
(C3.17a)
Finding a 2D vector’s
magnitude and direction
from its components
ux
ϕ = tan-1 __
u (C3.17b)
| |
y
–1
where tan ( ) is the inverse tangent (or “arctangent”) function.
So in the case
______________
in figure C3.8 (assuming that u
W is a displacement), │u
W│ = (3
m)2 + (4 m)2 =
5 m and θ = tan-1│4 m/3 m│ = 53°. Alternatively, we could calculate ux =
−│u
W│cos θ = −(5 m) cos 53° = −3.0 m, uy = +(5 m) sin 53° = 4.0 m. For a
frame in standard orientation on the earth’s surface, we might characterize
u
W’s direction as being “53° north of west.”
Note that I defined both θ and ϕ to be interior angles of the triangle in
figure C3.8. What if we wanted to find the direction angle ψ in that figure?
Why it is good to choose direction angles smaller than 90°
Chapter C3
48
y
α
w
x
Vectors
Since the sine, cosine, and tangent functions are defined for all angles from 0°
to 360°, we could in principle rewrite equations C3.15 and C3.17 in terms of ψ.
However, I find it safer in practice to work with the interior angles, because
I know that their sines, cosines, and tangents are positive, reducing the
chances for sign errors. If necessary, one can use ψ = 180° - θ to convert
from θ to ψ or vice versa.
Exercise C3X.3
Figure C3.9
W
W
What are the components of w
in figure C3.9? What is w
’s magnitude and
and direction (assuming that our frame is in standard orientation)?
W
A vector w
in two dimensions.
C3.7
In a 1D situation, we can
represent a vector by a
single component
The confusion that can result
from using an unadorned
symbol for a component
An example
Vectors in One Dimension
We also encounter situations where all vectors of interest lie on a single line.
If we orient our frame so one axis (usually the x axis) coincides with that line,
then two components of every vector of interest will be zero, and the vector is
entirely described by its single component in the axis direction. We can then
W
do calculations involving vectors u
, w
W, etc. by replacing each vector symbol
in any equation with the vector’s corresponding nonzero component. For
W = mv
W becomes simply px = mvx.
example, the equation p
Some physics textbooks drop the subscript in one-dimensional cases and
use an unadorned symbol such as u to represent the component of u
W in the
axis direction. For example, one might say in a one-dimensional case that “the
particle’s velocity v = -10 m/s.” This notation is common, and does save a
few milliseconds when writing. However, it is also very common (even in the
same book!) to use u to mean │u
W│, which can never be negative and thus is not
the same as the vector’s nonzero component even in one dimension.
Whenever the same symbol might be used in different ways, errors (such
as assuming one meaning at first and then the other meaning later) become
probable. But this notation is so common that I consider it my duty to expose
the problem and show how to recognize the intended meaning from context.
As an example, consider the following actual quote from a physics textbook (whose title and author will remain nameless). The author, describing
a spherical ball of mass m1 at the end of a string that swings down and hits a
ball of mass m2 at rest, writes: “Thus _ 12 m1v 21i = m1 gh1, which
we can solve for
____
the speed v1i of sphere 1 just before the collision: v1i = 2gh1 …” Literally a
few lines later, the author writes: “Thus we can use equation […] to find the
velocity of sphere 1 just after the collision:
m1 − m2
v1 f = _______
v = [calculation omitted] ≈ −0.537 m/s”
m1 + m2 1i
The convention this text uses
(C3.18)
In this case, which of the two symbols, v1i or v1f, refers to a vector component,
and which refers to a vector magnitude? See if you can figure it out from
clues in the quote. (When you have a guess, see the page’s bottom left corner.)
What the author has done is technically correct, but it can be confusing
for someone not absolutely on top of which symbol means which in a specific
context. One of the competencies I hope you will develop is the ability to tell
from context which meaning a simple symbol like this might have.
Even so, to avoid the potential problem altogether, I will never in this
text use u to mean a component of u
W, even in a one-dimensional situation. If
W
I use the symbol u at all in the vicinity of a vector u
, it will mean │u
W│, and
I will also specifically say so. Because of my experience with the unnecessary
struggles of generations of students, I strongly urge you to do the same!
In the quote, v1i refers to a vector
magnitude and v1 f , refers to a vector component.
Homework Problems
49
TWO-MINUTE PROBLEMS
C3T.1 The x, y, and z directions of a reference frame point
up, west, and north, respectively. Such a coordinate system
is right-handed. T or F?
C3T.2 The x and y axes of a reference frame point forward
and to your right, respectively. The frame is right-handed
if the z axis points up. T or F?
C3T.3 We can describe a vector’s magnitude and direction
without a reference frame. T or F?
C3T.4
The components of a displacement vector ∆ r W between
two position vectors r W1 and r W2 depend on one’s choice of
­reference frame origin. T or F?
C3T.5
Consider the displacement vectors shown below.
A
C
D
E
T. None of the above
(a)
(b)
(c)
(d)
(c) If an object moves at a rate of 5 m/s in the –x direction,
W x = −5 m/s.
then v
(d) If an object moves at a rate of 5 m/s in the –y direction,
then v = +5 m/s.
W = 5 m/s and m = 2.0 kg, then p
W = 10 kg·m/s.
(e) If v
W
(f) The forces on the object cancel, so F
tot = 0.
(g) The speed at the end of the interval is v = v0 + 1.
C3T.7 An object has an initial position r W1, but is found a
W 2, where
short time later at position r
1.5 m
1.5 m
r W1 =
2.0 m , Wr 2 =
−3.0
m
[ −4.2 m ]
[ −4.2 m ]
(C3.19)
In a frame in standard orientation on the earth’s surface,
what is the direction of the object’s displacement during
this time interval?
A. East
D. South
B. West
E. Down
C. North
F
B
W
WA.
(b) F
A ≡ [Δ p
W]A/Δt implies that Δt = [Δp
W]A/F
W
Which vector (if any) is equal to A
?
W
Which is not equal to A
but has the same magnitude?
W?
Which is equal to -C
W?
Which is equal to 2B
C3T.6 Which of the following statements involve notation,
unit, or conceptual errors? For each statement, answer A if
the statement is acceptable, or E if it is erroneous.
W
W
W
W
W
W
(a) F
tot = F
1 + F
2 implies that │F
2│ = │F
tot│ − │F
1│.
C3T.8
│u
W
W − w
W │ ≥ ││u
W│ − │w
W││ for all vectors u
W and w
. T or F?
C3T.9 The only way a vector’s magnitude can be zero is if
all its components are zero. T or F?
C3T.10 In a situation where an object can move only along
the x axis, a book states “the force on the object is F = -kx,
where k is a constant, and x is the object’s position coordinate.” Is F being used here as a shorthand symbol for
│F
W│ (A) or Fx (C)?
C3T.11 In a situation where an object can move only along
the x axis, you see this statement in a book: “The object’s
velocity is v = (x - x0) / t, where x is the object’s position at
time t to the left or right of its position x0 at time t = 0.” Is v
being used here as a shorthand for │v
W│ (A) or vx (C)?
HOMEWORK PROBLEMS
Basic Skills
C3B.1 A reference frame on the surface of the earth has
an x axis that points upward and a y axis that points eastward. In what direction should the z axis point to create a
right-handed coordinate system? Explain using a picture.
C3B.2 Imagine you walk 200 m south, 300 m up, and 60 m
west in a reference frame in standard orientation on the
earth’s surface. Write your displacement as a column vector and compute its magnitude.
C3B.3 Calculate the components of the vector sum u
W + w
W and
the magnitude of that sum for the following displacement
W
W
vectors u
and w
. (Please show your work.)
2m
−4
m
W =
W =
u
w
−3 m
−1 m
[ 1 m]
[ 3 m]
(C3.20)
C3B.4 Calculate the components of the vector difference
u
W - w
W and the magnitude of that difference for the disW
W
placements u
and w
given in equation C3.20.
W
W for the disC3B.5 Calculate the components of u
- 3
w
W
W
placements u
and w
given in equation C3.20.
W
W for the disC3B.6 Calculate the components of u
+ 2
w
W
W
placements u
and w
given in equation C3.20.
50
Chapter C3
Vectors
C3B.7 Suppose someone is standing on the ground with
his or her head at a position r WA, looking at a friend at the
top of a cliff whose head is at position r W B, where
−5 m
−5 m
r WA =
7 m
12 m , Wr B =
[ 2 m]
[ 14 m ]
(C3.21)
in a coordinate system in standard orientation on the
earth’s surface.
(a) What is the displacement vector from the head of the
person on the ground to that of the friend?
(b) What is the distance between the two people’s heads?
C3B.8 Suppose that in some coordinate system anchored
to the sun, the earth is at a position r W E and an alien spaceship is at a position r W A, where
0.100 Tm
−0.100 Tm
r WE =
0.288 Tm
−0.112
Tm , Wr A =
[
[ 0.400 Tm ]
0 Tm ]
(C3.22)
(a) What is the displacement of the alien ship relative to
the earth? (Note that 1 Tm = 1012 m = 1 billion km.)
(b) How far is the alien ship from the earth?
C3B.9 If you walk 85 m south and 25 m east from a certain
starting position, what are your displacement’s magnitude
and direction? (Specify the direction by stating an angle
relative to an appropriately chosen direction.)
C3B.10 A sailboat sails 25 km south and then 14 km west of
Malibu. What are the magnitude and direction of its total
displacement? (Specify the direction by stating an angle
relative to an appropriately chosen direction.)
C3B.11 Suppose you walk 500 m in a direction 30° south
of east. What are the components of your displacement
in a reference frame in standard orientation on the earth’s
surface?
C3B.12 Suppose that during a certain interval of time, a jetliner
flies a distance of 38 km along a straight line 35° west of north
at a constant altitude of 10 km. What are the components of
this jet’s displacement during this time interval in a reference
frame in standard orientation on the earth’s surface?
C3B.13 Suppose you read in a textbook that “at a point on
the hill a vertical distance
∆z below the top, the bike will
_____
be moving with v = 2gΔz .” Is v a shorthand notation
for │v
W│ or a component such as vx? Defend your response.
(Your answer will not depend on what g means, but
assume a coordinate system in standard orientation.)
C3B.14 Suppose you read a passage in a text describing a
one-dimensional collision between two objects, and the
passage says that “In this case, the objects’ combined
momentum is m1v1 + m2v2 = 0.” Do the symbols v1 and
v2 refer here to velocity magnitudes (speeds) or velocity
components? Defend your response.
Modeling
C3M.1 Consider the ominous situation described in problem C3B.8. Determine the components of the alien ship’s
velocity vector (in m/s) if it is heading directly toward
the earth and will arrive in 5.0 hours. (Hint: How will the
velocity vector compare to the displacement between the
earth and the alien ship?)
C3M.2 In a coordinate system fixed on the sun, the earth
and Mars are at positions r W E and r W M such that
−0.080 Tm
−0.200 Tm
r WE = −0.128
0.114 Tm
Tm , Wr M =
[
[ 0.005 Tm ]
0 Tm ]
(C3.23)
at a certain instant of time. Suppose we send a light flash
from the earth to Mars. (The planets won’t move very
much during the flash’s travel time.)
(a) How long will it take the flash to reach Mars? (Express
your answer in minutes.)
(b) What are the components of the velocity vector for that
flash? (Hint: How will the velocity vector compare to
the displacement vector between the planets?)
C3M.3 Mauna Kea on Hawaii’s Big Island is 4207 meters tall.
At what angle will its peak stand above the horizon when
viewed from a point on the shore 24 km east and 18 km
north of the peak? (You may ignore the earth’s curvature.)
C3M.4 A boat leaves San Pedro and travels 35 km 15° west
of south before its engine dies. You left San Pedro earlier
and have traveled 42 km 23° south of west by the time the
first boat’s distress call reaches you. How far and in what
direction is the first boat relative to you at that time?
C3M.5 You are in a research vehicle chasing tornadoes.
You receive a call that a tornado has been sighted 45 km
12° south of west relative to St. Louis. At that time, you are
55 km 10° north of west relative to St. Louis. How far and
in what direction is the tornado relative to you?
C3M.6 You and an archeologist companion, having escaped
from confinement by international antiquities mobsters,
are attempting to flee through underground tunnels. From
your starting point in a dungeon below a ruined palace,
you have traveled 150 m 37° east of north, then turned left
by a right angle and traveled 200 m further along a different tunnel. You now see a ladder leading to a ground-level
exit. You know that a 30-m wide river runs due east past
the palace, and the nearest point on its bank is 205 m due
north of the dungeon. Is the ground-level exit you see hidden in the woods across the river from the palace, or is it in
the exposed plain between the palace and the river? Calculate quickly—your life may depend on the answer! (Hint:
Note that just calculating your distance from the dungeon
is not enough to ensure your safety. Why?)
C3M.7 Suppose you read a passage in a text describing a collision between objects initially moving east and north with
W 1 and v
W 2, respectively. They then stick together and
velocities v
Answers to Exercises
51
move off with a common velocity v
W3. The text claims that
“The sum of the two objects’ initial momenta must equal the
combined objects’ momentum after the collision. Therefore,
we must have m1v1 + m2v2 = (m1 + m2)v3.” Assume the first
of these two sentences is true; focus on the second. Is this
statement true or is it a typo? If true, specify whether the
simple symbols v1, v2, and v3 stand for vector components or
vector magnitudes and describe how your choice makes the
second statement consistent with the first. If not, argue carefully why no interpretation of the meaning of these symbols
makes the second statement consistent with the first.
Derivation
C3D.1 Present a careful argument (preferably using a picture) answering each of the questions below.
(a) Under what circumstances is │u
W + w
W│ = │u
W│ + │w
W│?
(b) Under what circumstances is │u
W + w
W │ = 0?
(c) Can │u
W + w
W│ ever be greater than │u
W│ + │w
W│?
W
W
W
W
(d) Can │u
+ w
│ ever be greater than │u
│ - │w
│?
(e) Can │u
W - w
W│ ever be greater than │u
W│ - │w
W│ (assuming
the latter is positive)?
(Hint: Suppose the longer vector is u
W. Imagine that we
place the tail of w
W at the tip of u
W. The tip of w
W must then lie
W
somewhere on a circle of radius │w
W│ around the tip of u
.
Drawing a diagram of this may help you visualize all of
W
W
the possible relationships between u
and w
.)
Rich Context
C3R.1 Two teams of explorers leave a common point. The
first team travels 5 km north across a plain, then follows
a river 15° west of north for 7 km before making camp for
the night. The second climbs a ridge, traveling along a trail
that climbs upward to an altitude of 2.5 km to a point that
is 6.0 km horizontally northeast of the starting position.
This team then follows the ridge northward at approximately the same elevation for 4 km before setting up camp.
Can the two teams communicate that night if their radios
have a range of 5 km?
C3R.2 A jetliner takes off from Los Angeles International
Airport, and after 5 minutes, the jet has an altitude of 5 km
above the level of the airport and is 25 km west and 10 km
north of the airport. What is the magnitude and direction
of its displacement during this time interval? Specify the
direction by stating two angles: the angle of the displacement’s direction west of north, and the angle of the displacement’s direction above the horizontal.
C3R.3 Imagine you want to measure the height of an
inaccessible mountain peak on an island in the South
Pacific. First, you line up your boat so it is due west of the
peak, and then find that the peak is an angle of ϕ = 12°
up from the horizon. Next, you move your boat a displacement of 25 km, 37° south of east (according to your GPS
receiver), and find that the mountain is now due north. You
are about to take another measurement of the peak’s angle
from the horizon from this new position, but your first mate,
while walking by, spills hot coffee on your back. You drop
your transit to the deck and it breaks. You severely cuss out
the first mate and take the transit to the chief engineer, who
tells you it will take at least 3 days to fix (“Ye canna expec’
me to work miracles, Cap’n!” he says.) After calming down,
though, you realize you already have enough information
to determine the mountain’s height. Do so.
ANSWERS TO EXERCISES
C3X.1
Here is how it works out:
−3 m
1m
4m
r WQ − r WP = 3
0 m = Δr W
m − 3 m =
[
]
[ 4 m ] [
2m
2 m]
(C3.24)
C3X.2 You will find in the following a corrected version of
the statement given in the exercise. The error corrections
are in color and in curly brackets. Note that you don’t have
to specify units for a value of 0.
“A 2-kg particle is initially moving in the -x direction at
10 m/s and so has momentum { m│v
W│ } = {+}20 kg·m/s, with
components {p1x} = -20 {kg·m/s}, {p1y} = {p1x} = 0. It hits
a second particle initially moving in the +y direction
with a momentum of 5 kg·m/s. Thus, p2x = p2z = 0, p2y =
5 {kg·m/s}. The two particles’ total momentum {has a magnitude of 20.62 kg·m/s}. If after the collision the ­particles
stick to each other and move together with the same total
momentum at a speed of {│v
Wf│ } = {+}5 m/s, their total mass
must be { mtot = │p
Wtot│/│v
Wf│ }= {4.12} kg, so the ­second particle must have had a mass of {2.12} kg.”
C3X.3 The components of w
W are wx = +6 m, wy = -5 m,
and wz = 0. Its magnitude and direction angle α are 7.81 m
and 50.2°, respectively.
C4
Systems and Frames
Chapter Overview
Introduction
Every object in our daily experience is a vast system of interacting elementary particles. The main goal of this chapter is to prove and discuss the fifth principle of modern mechanics introduced in chapter C2, which was that we can treat interactions
between macroscopic objects as if they were interactions between particles. We will
also further develop the concept of reference frames introduced in chapter C3.
Section C4.1: Systems of Particles
A system is a set of particles with a well-defined “boundary” that allows us to distinguish particles inside the system from those outside. An extended object is a ­system
whose boundary is a surface in space that encloses a nonzero volume. An internal
interaction is an interaction between two particles inside a system; an external
­interaction involves one particle inside the system and one outside.
Section C4.2: A System’s Center of Mass
A system’s center of mass is a mathematical point whose position is given by
r WCM ≡ ___
1 (m1 r W1 + m2 r W2 + ⋯ + mN r WN)
(C4.1)
M
• Purpose: This equation defines the position r WCM of a system’s center of mass in
terms of the positions r W1, r W2, …, r WN and masses m1, m2, …, mN of its N constituent
particles. M ≡ m1 + m2 + ⋯ + mN is the system’s total mass.
• Limitations: This is a precise definition as long as we know the exact positions
and masses of the system’s particles.
• Notes: A system’s center of mass is a “weighted average” that “weights” each
particle’s position in proportion to its mass.
An example in the section shows that the center of mass of a two-particle system:
1.
2.
3.
4.
Lies along the line connecting the particles,
Lies between the particles,
Is exactly halfway between the particles if m1 = m2, and
Is closer to the more massive particle if m1 ≠ m2.
In an upper-level mechanics course, you will learn how to calculate a system’s center
of mass in practical circumstances. At present, we need only know that
1. Every extended object or system has a well-defined center of mass,
2. The center of mass of a homogeneous symmetric object (such as a sphere, cube,
or cylinder) is located at that object’s geometric center, and
3. We can calculate the position of the center of mass of a set of extended objects by
treating each object as if it were a point particle with all its mass concentrated at
its individual center of mass.
52
Section C4.3: How the Center of Mass Moves
This section proves that
WCM = m1v
Mv
W1 + m2v
W2 + ⋯ + mNv
WN
W 2 + ⋯ + p
W N ≡ p
W tot
= p
W1 + p
(C4.6)
• Purpose: This equation describes how a system’s total momentum p
Wtot is related
to its total mass M and its center-of-mass velocity v
WCM. Note that m1, v
W1, and p
W1
are the mass, velocity, and momentum of the first particle, and so on.
• Limitations: Relativity requires us to adjust the definitions of v
W1, v
W2, …, v
WN and
W CM in this expression, but the basic principle remains intact.
v
This equation and the momentum-transfer principle together imply the following:
The particle model: A system’s center of mass responds to its external interactions exactly as a point particle would respond to those interactions.
We can therefore often model an extended object as if it were a particle located at
its center of mass, as claimed in chapter C2. Any point on a nonrotating rigid object
moves at the same velocity as its center of mass.
Section C4.4: Inertial Reference Frames
We can find reference frames where a noninteracting object does not move with a
constant velocity and so Newton’s first law fails. In such frames, our entire m
­ odel of
modern mechanics also fails. We will learn how to handle such noninertial ­reference
frames in unit N, but for now we will do physics calculations only in ­inertial ­reference
frames where Newton’s first law holds.
Section C4.5: Freely Floating Frames
An ideal inertial reference frame would be a nonrotating frame floating in deep space
far from any gravitating objects. However, Einstein’s general theory of relativity
­implies that a frame attached to the center of mass of a system behaves like such an
ideal inertial frame if (1) the frame is not rotating, (2) the system’s only external interaction are gravitational interactions with objects whose centers are very distant compared to the sizes of both the system and the frame, and (3) we ignore those external
gravitational interactions. We call such a frame a freely floating frame.
A list of usable frames in decreasing order of perfection is therefore:
1.
2.
3.
4.
5.
A nonrotating frame in deep space
A nonrotating and freely floating frame (ignoring external gravitational fields)
A nonrotating frame attached to the earth’s center of mass
A frame attached to the earth’s surface (such a frame only slowly rotates)
A frame moving at a constant velocity with respect to any of the above
Section C4.6: Interactions with the Earth
Small objects interacting with the earth seem to gain or lose momentum ­without
­affecting the earth’s momentum, which would be a violation of the principle of
momentum transfer. However, the momentum of the earth does change in such
­interactions (when viewed in an appropriate inertial reference frame not attached
to the earth), but because of the earth’s comparatively huge mass, changes in the
earth’s ­velocity are negligible. This means that though we cannot use a reference
frame ­attached to the earth to analyze the response of the earth to interactions, such
a frame will be adequately inertial for other purposes. (In such a frame, though, the
earth ­appears to absorb or supply momentum to human-scale objects without being
affected.)
53
54
Chapter C4
Systems and Frames
Figure C4.1
Examples of extended objects,
ranging from silicon atoms
to galaxies.
Credits: Silicon atoms: © ­Andrew
Dunn/Alamy. Lion: © Rene
Frederic/AGE Fotostock.
­Galaxy: NASA
C4.1
Definition of a system
Definition of an
extended object
Definitions of internal and
external interactions
Systems of Particles
A system in physics is a set of interacting particles having a well-defined
boundary that allows us to determine whether a given particle is a member
of the set or not. A system boundary is a completely imaginary artifact that
we superimpose on the universe to help us think and communicate more
clearly. We can define this boundary in any way we find helpful as long as it
unambiguously distinguishes particles inside the system from those outside.
An extended object is a material object having a well-defined surface in
space that defines the system’s boundary and encloses a nonzero volume. As
discussed in chapter C2, we can think of any material object as being a system
of interacting elementary particles. An extended object is thus a special case of
a system, one having a certain kind of boundary. The macroscopic objects of
our daily experience are virtually all extended objects according to this definition. Figure C4.1 illustrates a range of extended objects.
We call an interaction between two particles both within a given system
an internal interaction, and an interaction between one particle inside the
system and another outside the system an external interaction. For example,
if our system is a baseball, the interactions that hold the baseball’s particles
together are internal interactions, while the gravitational interactions between
the baseball’s particles and the earth’s particles are external interactions.
C4.2
A System’s Center of Mass
A system’s center of mass is a mathematical point whose position is given by
Definition of the position of a
system’s center of mass
r WCM ≡ ___
1 (m1r W 1 + m2 r W 2 + ⋯ + mN r W N)
M
(C4.1)
• Purpose: This equation defines (in a suitable reference frame) the position r W CM of a system’s center of mass in terms of the positions r W 1, r W 2, …, r W N
and masses m1, m2 , …, m N of its N constituent particles in that frame.
M ≡ m1 + m2 + ⋯ + mN is the system’s total mass.
• Limitations: This is a precise definition as long as we know the exact
positions and masses of the system’s particles.
• Notes: A system’s center of mass is a “weighted average” that “weights”
each particle’s position in proportion to its mass.
C4.2 A System’s Center of Mass
55
In column-vector form, this equation reads
(
)
x3
x
x1
x2
CM
1 m y 1 + m y 2 + ⋯ + m y 3
___
CM =
y
1
2
3
[ z2 ]
[ zCM ] M
[ z1 ]
[ z3 ]
x
m1x1 + m2x2 + ⋯ + mNxN
CM
1
___
m
or y
=
1y1 + m2y2 + ⋯ + mNyN
CM
[ zCM ] M [
m1z1 + m2z2 + ⋯ + mNzN ]
(C4.2)
according to the mathematics we learned in chapter C3. This allows us to
calculate quite easily the center-of-mass position of any system containing
only a handful of particles whose positions we know.
Systems consisting of two particles turn up a lot in physics. The following example illustrates how to calculate the center of mass of such a system.
Problem: Consider a system consisting of two particles with masses m1 and
m2 separated by a distance D. Where is the center of mass of such a system?
The center of mass of a
two-particle system
Example C4.1
z
y
Solution For the sake of simplicity, let’s choose our reference frame so both
particles lie along the x axis and so the particle with mass m1 is located at
the origin. This means that x1 = 0 and x2 = D in this reference frame (see
­figure C4.2). Equation C4.2 then implies that
m10 + m2D
x
D
CM
m2
1
_______
y
=
m10 + m20 = _______
0
CM
[ zCM ] m1 + m2 [ m10 + m20 ] m1 + m2 [ 0 ]
m1
(C4.3)
This implies that the center of mass lies on the x axis at a point that is a distance Dm2/(m1 + m2) from the particle with mass m1.
Note that m2/(m1 + m2) is a unitless number less than 1, so the position of
the center of mass, like D, has units of distance (as it must) and always lies on
the line between the two particles (as we would intuitively expect).
We can see from example C4.1 that a two-particle system’s center of mass
1.
2.
3.
4.
D
Lies along the line connecting the particles (the x axis in this case),
Lies between the particles [because m2/(m1 + m2) < 1],
Is exactly halfway between the particles (at x = _ 12 D) if m1 = m2, and
Is closer to the more massive particle if m1 ≠ m2. For example, if m1 > m2,
then m2/(m1 + m2) < _ 12 , so the center of mass is closer to m1 than m2.
These features probably coincide with whatever intuitive sense you might
have about where the center of mass of a two-particle system should be.
We can in principle use equation C4.1 to find the center of mass of any
multiparticle system. However, the outrageously huge number of elementary particles involved in even small extended objects makes this impractical. A more practical (but approximate) method is to break the object up
into a moderate number of macroscopic chunks that are still small enough
compared to the whole that we can consider the particles in each to have the
same position. For example, when computing a galaxy’s center of mass, we can
treat its stars as point particles. (In a galaxy-sized reference frame, all the
elementary particles in a given star do have the same position unless we are
measuring those positions to better than 1 part in 1012!)
xCM
m2
x
Figure C4.2
A convenient reference frame
for calculating the center of
mass of a two-particle system.
The displayed center of mass
location would be accurate if
m1 ≈ 2m2.
Chapter C4
56
Example C4.2
Systems and Frames
Problem: A water molecule consists of an oxygen atom (O) and two hydrogen atoms (H) in roughly the configuration shown below (actually, the angle
between the arms is more like 105°, but taking it to be 90° makes the calculation simpler). The oxygen atom’s mass is about 16 times the mass of each
hydrogen atom, and the distance D between the hydrogen and oxygen nuclei
is measured to be 96 pm (where 1 pm = 10–12 m). Note that virtually all of
the mass of any atom is concentrated in the nucleus, which is about 105 times
smaller than the atom as a whole. Where is this system’s center of mass?
xCM
D
H
O
yCM
D
CM
H
y
x
Solution Since virtually all of an atom’s mass is in its nucleus, and the whole
nucleus is point-like compared to the atom’s size, we can model the system
as a system of three particles. It is also very helpful to orient one’s reference
frame so as few quantities as possible are nonzero. In the reference frame
I have chosen above, the oxygen nucleus’s position components are all zero,
and two out of the three components of each of the hydrogen nuclei’s positions are also zero. Let m be the unknown mass of a hydrogen atom: the oxygen atom’s mass is then 16m. Equation C4.2, therefore, implies that
(
)
0
xCM
D
0
D
1 16m 0 + m 0 + m D = ___
1
yCM = ____
D
[ 0 ]
[ zCM ] 18m
[ 0 ]
[ 0 ] 18 [ 0 ]
(C4.4)
This means that xCM = yCM = D/18 = 5.3 pm in this reference frame. In our
reference frame, the center of mass is therefore directly downward from the
oxygen nucleus, a distance of
_______________
_______________
( 18 ) ( 18 )
__
D = 7.5 pm (C4.5)
│r
W CM│=
x 2CM+ y 2CM+ z 2CM =
___
D + ___
D + 0 = ______
2
2
2
18
Note that the units of both the components xCM and yCM, as well as r WCM, come
out in the length unit of picometers, which is reassuring.
What to know about the center
of mass of more complicated
systems
In an upper-level mechanics course, you would learn mathematical techniques that would help you calculate the center of mass of many different
kinds of systems. For our present purposes, though, it is enough to know that
1. Every extended object or system has a well-defined center of mass,
2. The center of mass of a homogeneous symmetric object (such as a sphere,
cube, or cylinder) is located at that object’s geometric center, and
3. We can calculate the position of the center of mass of a set of extended
objects by treating each object as if it were a point particle with all its
mass concentrated at its individual center of mass. (See problem C4D.1
for a proof of this assertion.)
C4.3 How the Center of Mass Moves
C4.3
57
How the Center of Mass Moves
Why are we so interested in the center of mass? It turns out that the principles of modern mechanics discussed in chapter C2 imply that a system’s
center of mass responds in an especially simple way to the external interactions acting on the system’s particles.
Imagine that we look at the system at the beginning and then at the end
of a certain time interval ∆t. Let the positions of its particles at the beginning
and end of this interval be r W 1i, r W2i, …, r WNi and r W1f , r W2f , …, r WNf , respectively. The
position of the system’s center of mass at the interval’s beginning is
r WCM,i = ___
1 (m1 r W1i + m2 r W2i + ⋯ + mN r WNi)
M
(C4.6)
and an analogous formula yields r W CM, f . The change in the position of the center of mass during this time interval is Δr WCM ≡ r W CM, f − r W CM,i
Exercise C4X.1
Show that substituting equation C4.6 and the analogous expression for
r W CM, f into the expression for Δr WCM, rearranging the terms in the difference, and
multiplying through by M/∆t yields
Δr W
Δr W
Δr W
Δr W
M _____
CM
= m1 ____
1 + m2 ____
2 + ⋯ + mN ____
N
Δt
Δt
Δt
Δt
(C4.7)
where Δr W1 ≡ r W1f − r W1i and so on.
Taking the limit of both sides of equation C4.7 as Δt W
0 and using the definiW ≡
W ≡ mv
W) yields
tions of velocity (v
lim [Δr W/Δt]) and momentum (p
Δt
W0
WCM = m1v
M v
W1 + m2v
W2 + ⋯ + mNv
WN
W 2 + ⋯ + p
W N ≡ p
W tot
= p
W1 + p
(C4.8)
• Purpose: This equation describes how a system’s total momentum p
Wtot
is related to the system’s total mass M and its center-of-mass velocity
W 1, and p
W 1 are the mass, velocity, and momentum of
v
WCM. Note that m1, v
W 2 are the same for the second; and so on.
the first particle; m2, v
W2, and p
W1,
• Limitations: Relativity requires us to adjust the definitions of v
W N, and v
W CM in this expression, but the basic principle remains intact.
v
W2, …, v
This very important expression tells us that a system’s total momentum
is simply equal to its total mass M times v
WCM, exactly as if the entire system was
a single particle located at its center of mass.
Moreover, the momentum-transfer principle discussed in chapter C2
implies that because a system’s internal interactions only transfer momentum between particles within the system, they cannot affect the system’s total
momentum. Only a system’s external interactions can transfer momentum
into or out of the system, so any change in a system’s total momentum must be
due solely to impulses delivered by external interactions extA, extB, and so on:
Wtot = [Δp]extA + [Δp]extB + ⋯
Δp
(C4.9)
How a system’s total momentum is related to the motion of
its center of mass
58
Chapter C4
Systems and Frames
Figure C4.3
This strobe photograph shows
a hammer thrown in the earth’s
gravitational field. The circular dot
at the hammer’s center of mass
follows the simple parabola of a
particle in a gravitational field, in
spite of the hammer’s rotation.
Credit: D. Haley / T. Moore.
Wtot = [Δp]extA + [Δp]extB + ⋯ and p
WCM with the analoIf we compare Δp
Wtot = M v
W = [Δp
W]A + [Δp
W]B + ⋯ and p
W = mv
W in chapter C2 for pargous equations Δp
ticles, we see that
The fifth principle of modern
mechanics (now proved)
Definition of a rigid object
The particle model: A system’s center of mass responds to its external interactions exactly as a point particle would respond to those
same interactions.
Since extended objects qualify as “systems,” this statement also applies to all
extended objects, even to objects that are not rigid.
This means that every idea or equation we have so far formulated for
interacting particles also applies to systems of particles, so long as we subW CM, and p
W tot for the particle quantities
stitute the system quantities M, r W CM, v
m, r W, vW, and pW, respectively, and add the qualifier “external” to any reference
to interactions. If we are interested only in the motion of a system’s center
of mass in response to external interactions, we can accurately model any
system as if it were a structureless particle located at its center of mass (see
figure C4.3).
This is a very important result! Imagine how difficult it would be to do
physics (or even stay alive!) if an extended object’s motion depended on the
detailed character of its internal interactions (which are so complicated we
could never hope to understand them in detail). The particle model is what
makes a physics of extended objects possible. It is also so basic that we typically take it for granted. We have just seen, however, that this idea is a nonobvious consequence of the principle that interactions transfer momentum.
Because that principle in turn is valid in all accepted physical theories, the
idea that we can model a system’s response to external interactions as if it
were a particle is also valid in all current theories. This is one of the most
important and useful principles in all of physics!
From now on, I will use this model implicitly whenever we deal with
extended objects. Whenever I refer to an extended object’s position, velocity,
or momentum, please understand that I am really talking about the position,
velocity, or momentum of that object’s center of mass. Whenever I talk about
the interactions that an object participates in, please understand that I am
really talking about the external interactions involving the object’s particles.
A rigid object is an object whose dimensions and shape do not change
significantly even in response to interactions. Many everyday objects are at
least approximately rigid. Note that if an object is rigid and not rotating, any
given point in the object has a fixed position relative to its center of mass, and
the velocity of that point will be the same as the velocity of the object’s center
of mass. Thus, to determine the velocity of a rigid object’s center of mass, we
C4.4 Inertial Reference Frames
59
need only measure the velocity of any point on the object (for example, its
edge). You have probably done this intuitively in the past; now you know
why it is a reasonable thing to do.
C4.4
Inertial Reference Frames
In chapter C3, I stated that, in principle, we can attach a reference frame to
any object we choose. However, it turns out that some choices are better than
others. Before we can dig into realistic applications of the physics we have
discussed so far, we need to discuss this problem in a bit more detail.
The second principle of modern mechanics (Newton’s first law) is that
a noninteracting or “isolated” object moves with a constant velocity. If an
isolated object does not move with a constant velocity, then its momentum
is changing without receiving any transfers from interactions, so the total
momentum of a system is not conserved, and our whole model falls apart.
Now, it is technically impossible in any reference frame near the surface
of the earth to find a truly isolated object, because any object near the earth
interacts gravitationally with it, and we cannot shield an object from gravity.
But let us imagine a small ball with a tiny jet engine that exerts an upward
thrust on the ball that exactly cancels the ball’s weight, so that the net momentum flow from these interactions is always zero. If there are no other interactions acting on the ball, it should then behave just as an isolated object does.
So according to Newton’s first law, if we place such a ball at rest in midair, it should remain floating there exactly at rest indefinitely. Perhaps you
can imagine that if we did this in a reference frame attached to the earth, the
ball would in fact remain floating at rest. However, we can also easily imagine
reference frames where we know intuitively that the ball would not.
For example, imagine we set up a reference frame in the enclosed empty
cargo space of a large truck while you stand on the road, peering through
the truck’s wall with your X-ray vision. The jet ball should float nicely at rest
if the truck is not moving. But imagine that the truck now begins to accelerate forward. From the side of the road, you will see the jet ball seem to float
at rest as the truck moves with increasing speed forward. But a friend standing inside the truck’s cargo space will see the truck remain at rest while
the ball moves backward (relative to the truck) with increasing speed (see
figure C4.4).
In the truck frame, the jet ball’s motion is changing, but your friend in
the truck cannot explain this by assuming that the ball starts interacting with
something. The ball is not in contact with anything, and assuming the ball
is uncharged and is not magnetic, it cannot participate in any long-range
Testing frames using
Newton’s first law
An example of a frame where
Newton’s first law fails
jet ball
Figure C4.4
With your X-ray vision, you see
a jet ball floating inside a truck
remain at rest, but your friend
inside the truck (who uses a reference frame attached to the truck),
observes the ball move faster and
faster toward the back of the truck
as the truck accelerates forward.
60
The definition of inertial and
noninertial reference frames
Chapter C4
interactions except gravitational interactions. It is not plausible that the
driver pressing the accelerator creates a planet-sized mass behind the truck!
We are forced to admit that under these circumstances an isolated object is not
observed in the truck’s reference frame to obey Newton’s first law.
On the other hand, if your friend holds the ball until the truck is moving at a constant velocity and then releases it, your friend would see the ball
subsequently remain at rest (obeying Newton’s first law), and you would see
it move at a constant velocity along with the truck (obeying Newton’s first
law). When the driver slams on the brakes to bring the truck to a stop, you
(on the ground) would see the ball continue to move forward at a constant
velocity, while your friend in the truck would see the ball suddenly begin to
move with increasing speed toward the front of the truck (as the truck slows
down relative to the ball), meaning that the ball again violates Newton’s first
law in the truck’s reference frame. The ball therefore obeys Newton’s first
law when the truck is moving at a constant velocity relative to the ground,
but disobeys it when the truck’s velocity changes.
Inertial reference frames are frames in which we find ­Newton’s first
law to be obeyed; noninertial reference frames are frames (such as the truck
frame when the truck’s velocity is changing) in which we find Newton’s first
law to be violated. The models of motion we have been developing work in
inertial reference frames but fail in noninertial reference frames. There are
actually ways of making sense of noninertial reference frames (which we will
explore in unit N), but until then, we will make progress only if we stick with
inertial reference frames.
C4.5
Freely floating frames
Systems and Frames
Freely Floating Frames
How do we distinguish an inertial frame from a noninertial frame? Ultimately
the only way is to test Newton’s first law. Indeed, most contemporary physicists will tell you that the real importance of Newton’s first law is it defines the
crucial distinction between inertial and noninertial reference frames.
Jet-powered floating balls are hard to come by, though, so let me suggest
some general guidelines for choosing frames. A truly inertial reference frame
would be a nonrotating reference frame located in deep space far from gravitating objects. Such frames are, however, accessible only in our imaginations.
However, one of the core predictions of the theory of general relativity
is that a frame attached to the center of mass of a system is (for all practical
purposes) physically indistinguishable from a frame in deep space if
1. The frame is not rotating.
2. The system’s only external interactions are gravitational, with objects
whose centers are far away compared to the size of both the system and
the frame.
3. We ignore these external interactions(!).
An example: the International
Space Station
Physicists conventionally call such frames freely falling frames (because,
like a freely falling object near the earth, their only external interactions are
gravitational). However, I find it more helpful to think of such frames as
freely floating frames, so that I do not focus on the external gravitational
interactions that general relativity instructs us to ignore.
An example is a frame attached to the center of mass of the orbiting
International Space Station (ISS). The external interactions for the system
consisting of the ISS and all its contents are purely gravitational interactions
with the earth and much more distant astronomical objects. Even the earth’s
center is very far from the ISS compared to the ISS’s size. So according to my
C4.5 Freely Floating Frames
assertion, a reference frame attached to this system’s center of mass should
behave as if it were an inertial frame, if we ignore all external gravitational interactions. And this is true! Perhaps you have seen video images from the ISS
where objects released at rest float at rest and objects that are launched continue to move with a constant velocity. It therefore appears that Newton’s first
law is satisfied in the ISS’s reference frame (see figure C4.5).
Are these objects really isolated? Not really, according to the simple model
we have been developing—the ISS and all its contents do interact gravitationally with their surroundings. The earth’s gravitational field is actually only
a few percent weaker at the ISS’s altitude than it is on the earth’s surface.
However, in spite of this, objects in the ISS reference frame behave as if they
were in an inertial frame where all external gravitational interactions have
been shut off!
Another frame of this type would be a nonrotating frame attached to
the earth’s center of mass. The earth participates in external gravitational
interactions with the moon, sun, and other astronomical objects, which are
all distant compared to the earth’s size (although the moon is only 60 earth
radii away). So we can pretend that a reference frame attached to the earth’s
center of mass is an inertial frame if we ignore all gravitational interactions
with other astronomical objects.
We will actually almost always work with reference frames attached to
the earth’s surface. These are almost as good as a nonrotating reference frame
attached to the earth’s center except that frames attached to the earth do
rotate once a day with respect to the rest of the universe. Since the earth’s
rotation is pretty slow, such frames are only slightly noninertial: you actually
have to look pretty hard to see violations of Newton’s first law. (But such
violations do exist, offering hard evidence that the earth really does rotate.)
Newtonian mechanics also offers an explanation as to why freely floating
reference frames are effectively inertial when we ignore all external gravitational interactions, an explanation that we will discuss in detail in unit N. But
for now, let us accept this gift from nature with gratitude. It actually makes
doing physics much simpler because (1) we do not have practical access to
any real (deep space) inertial frames and (2) it is nice that we do not have to
even think about gravitational interactions with distant astronomical objects,
which would increase the complexity of our calculations.
So here is a summary of inertial reference frames (or frames we can consider inertial) we might use, in decreasing order of perfection:
61
Figure C4.5
Floating fruit initially at rest in the
International Space Station’s reference frame remain at rest. Credit:
NASA.
A list of usable inertial frames
1. A nonrotating frame attached to the center of mass of a system of interest
far from any gravitating objects (the code phrase is deep space).
2. A nonrotating frame attached to the center of mass of a system of interest
that is freely falling in the gravitational fields of distant objects, and we
ignore those gravitational fields (the code phrase is floats in space).
3. A nonrotating frame attached to the earth’s center of mass (a special case
of the previous type).
4. A frame attached to the earth’s surface (or another slowly rotating object
that is floating in space).
5. A frame moving at a constant velocity with respect to any of the above.
(Such a frame has the same degree of perfection as the original frame.)
So, until we discover how to work with noninertial reference frames, we
will only make progress by taking the following pledge (Hold up your right
hand please!): “I solemnly swear to analyze a physical process, either qualitatively or quantitatively, using only a frame of a type appearing on the list
above.” The consequences of violating this pledge at this point in the course
will be nonsensical or paradoxical results.
We must only use inertial
reference frames
62
Chapter C4
Systems and Frames
Exercise C4X.2
We can more briefly summarize the list on the previous page by saying that a
usable reference frame falls into one of the following five types:
1. It is nonrotating and in deep space.
2. It is nonrotating and floats in space (assuming that we ignore external
gravitational fields).
3. It is nonrotating and is attached to the earth’s center of mass.
4. It is attached to the earth’s surface (or to another slowly rotating object).
5. It is moving at a constant velocity with respect to any of the above.
Write the type number corresponding to each of the reference frames
­described below. (Write “N” if the frame is noninertial.)
___ A reference frame attached to a smoothly cruising jet airplane.
___ A reference frame attached to a jet plane accelerating for take-off.
___ A nonrotating frame attached to the solar system’s center of mass.
___ The implicit reference frame set up by air-traffic control near an airport.
___ A reference frame established in your lab room.
___ A reference frame attached to the surface of the moon.
___ A reference frame attached to a nonrotating space probe that is coasting
through the solar system.
C4.6
A puzzle: Does the earth’s
momentum change when
interacting with you?
Choosing the correct
reference frame
Interactions with the Earth
An absolutely central feature of our model of modern mechanics is that interactions transfer momentum. However, as mentioned in chapter C2, this seems
(superficially) not to be true when objects interact with the earth.
Here is an illustration of the problem. Suppose you jump vertically
up from the ground. You clearly gain upward momentum in this process.
Your interaction partner is the ground, and by extension, the earth. So the
model developed in chapter C2 predicts that the earth must get a downward impulse from the contact interaction that is equal in magnitude to the
upward impulse you get. Yet it seems clear that the earth remains at rest.
This is one example of the paradoxes we can generate by violating the
pledge we took in section C4.5. If we use a reference frame literally attached
to the earth (as we often do), then the earth is always at rest in that frame by
definition, so it cannot receive momentum pretty much by definition. An
earth-based frame is not a good one to use in this particular case, though. If
we want to study how the earth responds to interactions, we clearly need to
use a frame in which the earth is free to move!
The correct reference frame to use in a case like this is a reference frame
fixed to the center of mass of the system containing both you and the earth. The
external interactions involving this system are purely gravitational with distant astronomical objects, so a frame attached to the system’s center of mass
satisfies the qualifications for a “freely floating frame” and we can therefore
model it as inertial (if we ignore the gravitational fields of all distant astronomical objects). By contrast, a frame attached to the earth does not qualify,
because in such a case the earth has an external non-gravitational external
interaction with you. If we use such a noninertial frame, we can expect absurd
results. So to verify that the earth recoils from your jump, we must set up a
C4.6 Interactions with the Earth
63
frame tied to the complete system’s center of mass and measure the earth’s
final velocity relative to that frame.
Let’s estimate what the earth’s velocity would be in such a frame. Assume
that the person’s mass is roughly 60 kg and that a person jumping off the
floor can achieve a vertical speed of (very roughly) 3 m/s (6.6 mi/h). The
impulse that the contact interaction between the person and the earth delivers to that person is thus about 180 kg·m/s upward. The earth should therefore get an impulse of 180 kg·m/s downward. Now, the earth has a mass of
mE ≈ 6 × 1024 kg. Assume for the sake of argument that the interaction with
the person is the only interaction (other than the gravitational interactions
we are ignoring) that the earth participates in. If the earth is originally at
rest in our reference frame and then receives an impulse of 180 kg·m/s, its
final momentum in our frame will be p
WE = 180 kg·m/s downward just after
the person leaves the ground, and it (or more correctly, the earth’s center of
mass) will be moving at a speed of
WE│ 180 kg
│p
·m/s
Wf E│ = _____
m ≈ ___________
≈ 3 × 10-23 m/s
│v
24
E
6 × 10 kg
The earth does move in such a
frame, but not very fast
(C4.10)
If the earth continued moving undisturbed at this rate for 1010 years (roughly
the age of the universe), it would only move about a hundredth of a millimeter, a small fraction of the diameter of a human hair.
The earth’s motion in this circumstance is not just hard to detect, it is so
small that we can hardly imagine ever being able to detect it. Therefore, our
model is fully consistent with the observation that the earth seems to remain
at rest: even though our model predicts that the earth’s center of mass does
not remain at rest in a valid inertial reference frame, it also predicts that the
motion will be so small as to be completely unobservable.
Here is an analogy. Suppose you take a cup of water from the ocean.
Did you notice that the ocean’s level falls a bit? No? Why not? You probably
believe that the ocean’s level really does fall a bit, since you know that if you
take some water from the ocean it really does have less water than it had
before. But because the ocean is so immense, taking a cup of water from it
does not measurably affect its level. Similarly, the earth (because of its enormous mass) can provide (or absorb) impulses without measurable effect.
The bottom line is that to resolve the paradox intellectually, we have to
imagine using a reference frame attached not to the earth’s center but to the
center of mass of the system that contains you and the earth. However, we
have just seen that even when we use such a frame, the change in the earth’s
motion due to normal, human-scale interactions is immeasurably small
­(because the earth’s mass is so immense). Therefore, for all purposes other
than calculating the earth’s own response to an interaction, a frame fixed
to the earth’s center of mass is indistinguishable from a frame fixed to the
complete ­system’s center of mass. We will, therefore, continue to use earthbased frames without worrying about this issue too much. Just keep in mind
that the earth can absorb or supply impulses without discernible effect.
We now have the background to take on realistic situations in a complex
universe with our model of modern mechanics! We will begin exploring serious applications of the model in the next chapter.
Exercise C4X.3
Describe a suitable reference frame for analyzing how the sun responds to its
gravitational interaction with Jupiter.
For purposes other than finding the earth’s motion, a frame
attached to the earth is fine
Chapter C4
64
Systems and Frames
TWO-MINUTE PROBLEMS
C4T.1 Which of the following things is an “extended
object”? For each item, answer “A” if the item is an acceptable extended object, “B” if the definition of an extended
object applies badly to the item, and “D” if it is debatable.
(a) An electron
(b) An atom
(c) A rock
(d) A swarm of bees
(e) The earth’s atmosphere
(f) The water in an ocean current
(g) Sugar molecules dissolved in a cup of water
(h) The vacuum between galaxies
C4T.2 We can consider a set of all chlorine atoms in a block
of salt (sodium chloride) to be a “system.” T or F? We can
consider that set to be an “extended object.” T or F?
C4T.3 Consider the solar system as a “system” of particles.
Which of the below qualify as internal interactions (A) and
which as external interactions (E)?
(a) The contact interactions between the earth and a car
moving on the earth’s surface
(b) The gravitational interaction between the earth and the
International Space Station
(c) The gravitational interaction between two planets
(d) The gravitational interaction between a given planet
and the sun
(e) The magnetic interaction between the sun and the
earth (both have magnetic fields)
(f) The gravitational interaction between the sun and the
larger galaxy
C4T.4 Suppose a planet with mass M has a moon with
mass _ 13 M. Where is the system’s center of mass? Refer to
the diagram below.
12
6
1
3M
M
B
A
C
D
E
C4T.5 Two rods with the same density and diameter form
a cross, as shown below. Where is the system’s center of
mass? (Hint: Treat each rod as a uniform object, whose center of mass is its geometric center.)
12
6
L
3L
L
A B
C D E
F
C4T.6 In example C4.2, if we had modeled the atoms as
solid spheres instead of modeling the nuclei as point-like
particles, we would have gotten the same result for the
system’s center of mass. T or F?
C4T.7 Consider a three-particle system. The center of mass
of this system must lie on the plane that contains all three
particles. T or F? Be prepared to explain why or why not.
(Hint: A clever choice of reference frame makes answering
this question easier.)
C4T.8 In a reference frame floating in space, which do you
think follows the straighter path?
A. The earth
B. The moon
C. The center of mass of the earth/moon system
C4T.9 Consider the types of reference frames listed below.
(NRF = nonrotating frame)
A. A NRF in deep space
B. A NRF that is freely floating
C. A NRF attached to the earth’s center of mass
D. A frame attached to the earth’s surface (or a similarly
slowly rotating object)
E. A frame moving at a constant velocity relative to one of
the frame types described above
F. A noninertial frame
Classify each of the frames listed below according to the
type of frame it is according to the list above.
(a) A NRF attached to Jupiter’s center of mass
(b) A NRF attached to a satellite orbiting the earth
(c) A frame attached to a car moving with a fixed speed on
a straight road
(d) A reference frame constructed in a sports stadium
(e) A reference frame attached to a roller-coaster car
(f) A reference frame attached to a freely falling elevator
C4T.10 Which of the following frames would be an appropriate inertial reference frame for analyzing the effects on
the earth of its gravitational interaction with the moon? In
each case, answer A if the frame is appropriate, or B if it
would be bad for this purpose. Except for the first case,
assume the frames are nonrotating.
(a) A frame attached to the earth’s surface
(b) A frame attached to the earth’s center of mass (CM)
(c) A frame attached to the earth–moon system’s CM
(d) A frame attached to the sun’s CM
(e) A frame attached to the entire solar system’s CM
C4T.11 In the situation discussed in problem C4T.10, which
would be the easiest reasonably valid frame to use?
C4T.12 A reference frame attached to a train is a reasonably
good inertial frame if the train is stopped at a station. T or F?
It is a good inertial frame if it is moving at a fixed speed in a
straight line. T or F? It is a good inertial frame if it is moving
at a fixed speed around a curve. T or F?
Homework Problems
65
HOMEWORK PROBLEMS
Basic Skills
C4B.1 Consider a system consisting of two point particles
A and B separated by 25 cm. The distance between particle
A and the system’s center of mass is 5 cm. What is the mass
of particle B compared to the mass of particle A? (Hint: Put
the center of mass at the origin.)
C4B.2 How far from the earth’s geometric center is the
­center of mass of the earth–moon system? Is it inside
the earth? The moon’s mass is about 1/81 times that of
the earth, and the moon orbits about 384,000 km from the
earth’s center. The earth’s radius is about 6380 km.
C4B.3 How far from the sun’s geometric center is the center of the sun–Jupiter system? Is it inside the sun? Jupiter’s
mass is about 1/1047 times that of the sun, and the average
radius of Jupiter’s orbit is about 779,000,000 km. The sun’s
radius is 696,000 km.
C4B.4 The nuclei of the hydrogen and chlorine atoms in
an HCl molecule are 128 pm apart. How far from the chlorine atom’s nucleus is the molecule’s center of mass? (The
mass of the chlorine n
­ ucleus is roughly 35 times that of the
hydrogen ­nucleus. Electron masses are negligible.)
C4B.5 The nuclei of the hydrogen and fluorine atoms in a
hydrofluoric acid (HF) molecule are 92 pm apart. How far
from the fluorine atom’s nucleus is the molecule’s center
of mass? (A fluorine nucleus has 19 times the mass of a
hydrogen nucleus. Electron masses are negligible.)
a reasonably good inertial reference frame if the truck is
moving at a constant speed but around a bend in the road?
Explain your reasoning.
Modeling
C4M.1 Two space walkers, one with mass m1 = 120 kg and
the other with a mass m2 = 85 kg, hold on to the ends of a
lightweight cable with length L = 25 m. The astronauts are
originally at rest in deep space. If the astronauts then start
pulling themselves toward each other along the cable until
they meet, roughly how far will the less massive astronaut
move? [Hints: How does the center of mass of the twoastronaut system move (or fail to move)? Express the result
as a fraction of L.]
C4M.2 Experienced high jumpers learn to drape their bodies over the bar as they go over it (see figure C4.6).
(a) What physical advantage does doing this provide?
(b) Estimate how far you would have to raise your personal center of mass to clear a bar 1.8 m high when performing a high jump. (Hints: What experiment might
you perform to find the vertical position of your personal center of mass? Where relative to the bar do you
think your c­ enter of mass would need to be when you
go over the bar? Make some thoughtful estimates and
explain your choices.)
C4B.6 Pluto and its satellite Charon are separated by a
center-to-center distance of 19,600 km. Pluto has 8.53 times
the mass of Charon.
(a) How far from Pluto’s center of mass is the system’s
center of mass?
(b) How does this compare to Pluto’s radius (1150 km)?
C4B.7 Two particles of mass 2m and one particle of mass
m lie on an equilateral triangle that has a height of L (measured from one particle to the midpoint between the other
two). Where is the location of the center of mass? (Hint:
Choose your x axis to connect the two massive particles
and the y axis to go through the light particle.)
C4B.8 In a nonrotating reference frame attached to the
sun, explain why the center of mass of the earth/moon
system will follow a straighter path than that of either the
earth or the moon.
C4B.9 Consider the implicit reference frame defined by the
Global Positioning System (GPS). Where does this frame
fit on the list of frame types given in section C4.5 and why?
C4B.10 Consider a reference frame constructed by your
friend in the truck discussed in section C4.4. Is this frame
Figure C4.6
A high jumper clears the bar. Credit: © Robert Daly/AGE
Fotostock.
66
Chapter C4
Systems and Frames
C4M.3 In a certain piece of modern sculpture, four iron
spheres are connected in a line by lightweight rods. The
separation between each sphere’s geometric center and the
next along the line is L. The spheres decrease in size along
the line. Their masses are 8m, 4m, 2m, and m, respectively.
The diameter of the smallest sphere is 11 cm, and the others
scale as the cube root of their masses. The artist wants to
suspend this system of spheres by a single wire so it rotates
ponderously in the breeze above the viewers’ heads. We
will see in unit N that the appropriate place to attach the
wire is at the system’s center of mass. Where is this point
(relative to the center of the most massive sphere)?
C4M.4 Calculate the correct distance between the oxygen
nucleus and the center of mass of a water molecule (see
example C4.2), considering that the angle between the
lines connecting the hydrogen nuclei to the oxygen nuclei
is really 105°, not 90°. (Hint: Orient your reference frame
so that the line connecting the hydrogen nuclei is parallel
to the x axis. Putting the oxygen nucleus at the origin is
still advantageous.)
C4M.5 A small asteroid (about d = 100 m in diameter) is
spotted moving directly toward Starbase Alpha floating in
deep space. The residents plant explosives on the asteroid
and manage to blow it apart into two chunks, one with a
mass of 2.4 times the other, while it is still far from the starbase. If the center of the lighter chunk passes H = 1800 m
from the edge of the starbase, which is D = 2.2 km in diameter, how close does the center of the other chunk get to the
starbase? (Hint: How does the two-chunk system’s center
of mass move after the explosion?)
How difficult would this be? Assume that the star in
question is a red dwarf that has a mass of about 0.30 times
that of the sun (whose mass is 2.0 × 1030 kg) and that
the planet has 1.5 times the mass of Jupiter (whose mass
1/1047 times that of the sun) orbiting at a distance of about
1.5 Tm from the star’s center (about 10 times the distance
from the earth to the sun).
(a) About how far is the star’s center of mass from the system’s center of mass?
(b) If the star is 8.1 ly from us, what will be its maximum
angular distance from the system’s center of mass
as seen by a telescope? Express your result in milliarcseconds (mas), where 1 mas ≡ (1/3,600,000)°.
(c) Considering that atmospheric disturbances will blur a
star’s apparent size to a blob about 250 mas across, is
detection of such a planet using this method easy?
Note: I did not choose this problem’s parameters randomly.
In 1996, George Gatewood at the ­University of Pittsburgh
announced the tentative discovery of a planet of this mass
and distance orbiting ­Lalande 21185, a red dwarf star 8.1 ly
from earth, after analyzing more than a half-century’s
worth of measurements of the star’s position relative to
distant stars. However, for the reasons described in the
problem, this measurement is very difficult and has not
been confirmed. Virtually all of the extra-solar planets we
know of today were found using the Doppler shift of the
star’s light due to its wobbling motion (this turns out to be
C4M.6 In a test of a new missile defense system, a missile
is fired on a trajectory that would directly strike a certain
bunker. A laser flash from the bunker ignites the missile’s
fuel, causing it to explode into two fragments, one with
1.8 times the mass of the other. If the fragments land at
the same time 45 m apart, by how much does the larger
fragment miss hitting the bunker? Ignore the effects of air
resistance. (Hint: The external gravitational interaction
between the missile and the earth would have caused the
missile’s center of mass to reach the ground at the location
of the bunker if the missile had not exploded.)
C4M.7 Even with the best telescopes currently available,
planets orbiting even the stars closest to the earth are too
dim compared to their parent stars to be imaged directly.
However, one might indirectly detect a planet’s presence
by observing its gravitational effect on the star. Assuming
that the star–planet system is very far from other stars, it
will be essentially isolated, so its center of mass should
move in a straight line. If the planet’s mass is large enough,
the system’s center of mass will be displaced significantly
from the star’s center of mass. When the planet orbits the
star, therefore, the planet and the star really both orbit the
system’s center of mass (like a pair of waltzing ballroom
dancers), as shown in figure C4.7. We might therefore hope
to detect a planet by observing how much a star’s position
“wobbles” around its general line of motion.
Figure C4.7
The motion of a star and planet through the sky. The large
ball represents the star and the small ball the planet. The
solid colored line represents the path of the system’s center
of mass. (The wobble has been greatly exaggerated.)
Answers to Exercises
67
much easier than making direct position measurements)
and/or by observing the slight decrease in a star’s brightness when a planet crosses its face.
C4M.8 NASA scientists would like to use physics to predict the trajectory of a space probe visiting the outer planets. In which frame would the probe’s motion be easiest to
analyze, a frame fixed to the earth’s surface, a nonrotating
frame attached to the earth’s center of mass, a nonrotating frame attached to the sun’s center of mass, or a nonrotating frame attached to the entire solar system’s center
of mass? Justify your choice by explaining what is good
about your choice and what is wrong or undesirable about
the other choices. (Note that a probe to the outer planets
might take many years to reach its destinations.)
Derivations
C4D.1 Prove that we can calculate the position of the center of mass of any set of extended objects by treating each
object as if all its mass is concentrated at a point at its individual center of mass. (Hints: Equation C4.1 implies that
M r WCM = m1 r W1 + m2 r W2 + ⋯ + mN r WN
(C4.11)
where M is the system’s total mass and the sum is over all
N elementary particles in the system. A similar equation
allows you to calculate mA r WA for object A by summing over
all of the particles in that particular object. Argue that you
can group the terms in equation C4.11 in such a way to
prove the result.)
C4D.2 Prove that in a two-object system, the distance
between the system’s center of mass and each object is
inversely proportional to that object’s mass.
Rich Context
C4R.1 An otherwise uniform solid sphere of radius R has
a hollow space in the shape of a sphere of radius _ 12 R whose
diameter goes from the larger sphere’s center to its surface.
Locate the center of mass of this system, expressing its
distance from the large sphere’s center as a fraction of R.
(Hints: Draw a picture. Also note that you know where the
large sphere’s center of mass would be if it were whole.)
C4R.2 A certain child’s top consists of a uniform solid
wooden sphere of radius R glued to the end of a wooden
rod of length R and diameter _14R. Assume the sphere and
rod have the same density. Where is this system’s center of
mass relative to the sphere’s center? (Express your result
as a fraction or multiple of R.)
C4R.3 A 56-kg canoeist sits at rest at the back end of a
23-kg canoe. The canoe is at rest in the still water of a lake
with its front end about 50 cm from the end of the dock.
The canoeist realizes that the canoe’s paddle is still on the
dock, and so carefully crawls back to the front of the 3.8-m
canoe. Is the canoeist likely to be able to reach the paddle?
[Hint: How will the center of mass of the canoe/canoeist
system move (or not move) during this process? Be sure to
define appropriate symbols!]
C4R.4 During the zombie apocalypse, you try to escape by
climbing high into an urban construction site, hoping that
zombies will be too spastic to climb successfully. But two
zombies make it to your level, and you find yourself and
the two zombies somehow standing on opposite ends of
an unattached plank that is balanced like a see-saw on a
crossbeam. If the center of mass of the system comprised of
you, the plank, and the two zombies shifts either forward
or backward relative to the crossbeam, the plank will tip
over and you will all fall to the street far below. So as the
zombies advance toward you along the plank, you have
to advance as well to keep that center of mass located on
the supporting crossbeam. But if you can make it to the
­crossbeam before the zombies can grip you, you can escape
by climbing onto the crossbeam and then tipping the plank
over with your foot. The plank is 30 feet long and has a
mass of about two people. You need to be 30 inches or
more from the zombies when you reach the crossbeam, or
they will be able to grab you. Are you going to make it?
ANSWERS TO EXERCISES
C4X.1
The calculation goes like this:
C4X.2
Δr WCM = r WCM, f − r WCM, i
= ___
1 (m1 r W1f + m2 r W2 f + ⋯ + mN r WNf)
M
1 (m r W + m r W + ⋯ + m r W )
− ___
1 1i
2 2i
N Ni
M
1 (m [r W − r W ] + m [r W − r W ] + ⋯ + m [r W − r W ])
= ___
1 1f
1i
2 2f
2i
N Nf
Ni
M
= ___
1 (m1 Δr W1 + m2 Δr W2 + ⋯ + mN Δr WN)
M
Dividing both sides by ∆t yields equation C4.7.
(C4.12)
The answers are:
5 (Smoothly cruising jet airplane)
N (Jet plane accelerating for take-off)
2 (Solar system’s center of mass)
4 (Air-traffic control near an airport)
4 (Your lab room)
4 (Moon frame)
2 (Space probe)
C4X.3 Such a frame must allow the sun to move, so it cannot be attached to the sun. A nonrotating frame attached
to the center of mass of the sun–Jupiter system (or maybe
better yet, the entire solar system) would be suitable.
C5
Conservation
of Momentum
Chapter Overview
Introduction
This chapter takes the model of modern mechanics that we have been developing and
shows that one of its important consequences is the law of conservation of momentum, a
topic we will revisit in the last chapter of this unit and again in unit R. This chapter also
introduces you to a variety of tricks and techniques that expert physicists use to make
solving problems easier.
Section C5.1: Degrees of Isolation
We call a system free of any external interactions an isolated system. Since only external interactions can cause momentum to flow into or out of a system,
The law of conservation of momentum: An isolated system’s total momenW tot is conserved (that is, it does not change with time).
tum p
In practice, very few systems are truly isolated. However, we can usefully apply
the law of conservation of momentum to systems that:
1. float in space, where we can ignore even large external gravitational interactions,
2. are functionally isolated (external interactions cancel each other out), or
3. involve a collision (an intense but brief internal interaction between one or more
of its components) and we look at the system’s state just before and just after that
collision.
Section C5.2: How to Solve Physics Problems
This section describes tools and tricks that experienced physics problem-solvers use
to make difficult problems easier and to describe the model one is constructing both
clearly and efficiently. Among other things, the chapter discusses the following tricks
for achieving problem-solving mastery:
1.
2.
3.
4.
5.
6.
7.
Remember a problem’s four core tasks: translate, model, do math, check.
Draw a picture.
Start with a familiar model.
Write a master equation or equations.
List knowns and unknowns (and count equations).
Do algebra with symbols (instead of numbers) to save time and grief.
Track units to save grief.
The section discusses how these tricks help experts get around limitations in one’s
working memory implied by research into cognition.
68
Section C5.3: Conservation of Momentum Problems
All problems involving conservation of momentum share certain aspects. The following checklist contains items that should appear in one form or another in the description of the model you construct to solve a problem:
CoM-Specific Checklist
❒ Describe the system.
❒ Describe its external interactions.
❒ Describe how it is isolated.
❒ Describe limits that isolation imposes.
❒ Draw “initial/final” diagrams.
❒ Draw coordinate axes.
❒ Momentum is a vector!
General Checklist
❒ Define symbols.
❒ Draw a picture.
❒ Describe model and assumptions.
❒ Use a master equation.
❒ List knowns and unknowns.
❒ Do algebra symbolically.
❒ Track units. ❒ Check result.
Section C5.4: Examples
The examples in this section illustrate applications of conservation of momentum as
well as various approaches to applying the checklists.
Section C5.5: Airplanes and Rockets
Airplanes are able to stay aloft because their wings deflect air downward. The principle of momentum transfer implies that since the interaction between the wings
and the air delivers a downward impulse to the air, it must also deliver an upward
­impulse to the wing.
Rockets work by ejecting propellant backward as rapidly as possible. The rocket
must then move forward faster to conserve momentum. The impulse delivered per
unit mass of propellant is equal to the speed of the engine’s exhaust. The performance
of a rocket engine improves significantly as this quantity increases.
Rocket engine performance is sometimes expressed in terms of the engine’s
­specific impulse (the impulse delivered per unit propellant weight on the earth’s surface). This has units of seconds and is proportional to the exhaust speed.
69
70
Chapter C5
C5.1
The law of conservation of
momentum
Conservation of Momentum
Degrees of Isolation
We are finally ready to apply the principles of modern mechanics to realistic
situations. In unit N, we will apply the principles to the question of how individual objects respond to external interactions. In this unit, however, our focus
is on the behavior of systems of objects, which is governed by three great conservation laws: conservation of (linear) momentum, conservation of angular
momentum, and conservation of energy. We start with the conservation of
linear momentum, which is the simplest.
We call a system that does not participate in any external interactions an
isolated system. The momentum-transfer principle implies that because only
external interactions can cause momentum to flow into or out of a system,
The law of conservation of momentum: An isolated system’s total
W tot is conserved (that is, it does not change with time).
momentum p
Degrees of isolation
(1) A system is isolated if it
floats in space
(2) A system may be
functionally isolated
This is a core consequence of the momentum-transfer principle. Indeed,
this law and the momentum-transfer principle are two sides of the same
coin. Though I have here “derived” conservation of momentum from the
­momentum-transfer principle, I could have just as easily done the reverse.
Both are just different ways of expressing the consequences of the deep symmetry principle that the laws of physics are independent of your location in the universe. Perhaps the best way to think about it is that the momentum-transfer
principle expresses this deep symmetry in our particular model of mechanics.
The law of conservation of momentum might seem to be of little practical use, since no physical system is truly isolated from its environment.
However, a system need not be truly isolated for the law to be useful. In general, a system’s momentum is nearly conserved in processes where external
interactions fail to transport a significant amount of momentum into or out of
the system. This is true in three general categories of processes.
First, the system’s external interactions might be negligibly weak compared to its internal interactions. This is actually pretty unlikely, because
gravitational interactions with other objects in the universe will only be negligible if you are in “deep space,” genuinely far away from any gravitating
objects. Even our solar system, which is quite far from any other astronomical object, experiences a significant gravitational pull from the center of our
galaxy, which (though it is far away) has a truly astronomical mass.
However, we saw in the last chapter that we can (and indeed must!)
ignore external gravitational interactions (even if significant) if we use a reference frame that is freely floating (freely falling). In such a frame, it is as
if the external gravitational interactions on the system don’t exist. So if a
system’s only external interactions are gravitational and we use a freely floating reference frame (so we can ignore those interactions), then the system’s
momentum will be conserved. We say that such a system is isolated because
it floats in space. This is a very common situation, as we will see.
Another possibility is that the system does participate in significant external interactions, but the momentum flows due to these interactions cancel,
so the system’s total momentum remains constant in spite of those interactions. We encountered such a situation in chapter C2, where we examined a
photograph of two disks sliding nearly frictionlessly on air cushions above
a flat surface. Each disk participates in a significant gravitational interaction
with the earth and a significant contact interaction with the air cushion that
supports it, but the momentum flows from these interactions cancel and so
have no net effect on either disk’s momentum, and thus no net effect on the
system’s total momentum. We call such a system functionally isolated, since
it functions as if it were isolated even though it is not.
C5.2 How to Solve Physics Problems
Finally, our system might participate in significant external interactions
that do not cancel, but we only look at its total momentum just before and just
after an intense but brief internal interaction. In physics, a collision is any
physical process in which the internal interaction between two system objects
(1) acts only briefly, but (2) delivers to each object a much larger impulse than
any external interaction during that time. (Note that this definition does not
require that the objects actually touch during the interaction!) If the collision
is sufficiently brief, external interactions simply do not have enough time
to transfer significant momentum to the system. So as long as we look at
the system just before and just after such a collision, its total momentum is
approximately conserved.
71
(3) Momentum is also conserved during a collision
Exercise C5X.1
Classify the systems described as floating in space (S), functionally isolated
(F), involved in a collision (C), or not isolated at all (N).
1. A bowling ball strikes a pin. ____
2. Two black holes in space coalesce. ____
3. A car crashes into a tree. ____
4. Two gliders on an air track are connected by a spring. ____
C5.2
How to Solve Physics Problems
One of this course’s main goals is to develop your ability to solve serious
physics problems, not the simple one-step “plug-and-chug” high-schooltype problems that are good for building basic skills, but problems more like
those we encounter when applying physics to real life. Solving such problems is genuinely difficult. My goal is to teach you tricks and techniques that
experienced physicists use to solve problems more easily.
Something that helps is to recognize that almost any serious physics
problem involves four core tasks. (1) You must first translate the problem
from however it is presented into the language of mathematics. This involves
defining mathematical symbols and connecting them to quantities described
in the problem, as in “let m be R2-D2’s mass” and (when you use vectors)
defining your reference frame. (2) You must then model the situation, a task
which involves recognizing the physical principles that apply to the situation
and making appropriate simplifications and approximations to make the
problem solvable. This part of a problem solution might include statements
like “Let the system be Harry and the bludger” or “Assume that the zombies slide without friction.” (3) The physical principles implied by the model
ultimately provide a set of equations to solve mathematically for the desired
final result. This is often the easiest (and thus the least important) part of the
problem. (4) Experienced physicists also habitually check both intermediate
and final results. Is the result plausible? Does it have the right sign? Even
experts can make mistakes, but experts also know how to catch errors.
In my experience, many people new to college-level physics assume that
“solving” is the only task one must perform. However, doing math correctly
(though it is a valuable skill) is not the only skill a physicist needs to master,
and should not be your focus in this course. Professional analysis of physical
situations in the real world always requires translating, modeling, and checking as well as doing math. In the simple problems one usually sees in high
The four core tasks: translate,
model, solve, check
72
Drawing a picture
is a good way to start
Select a model you
know how to solve
Chapter C5
Conservation of Momentum
school, someone else has implicitly done these tasks for you. In this collegelevel course, you will practice doing them for yourself.
Perhaps the most common complaint a physics teacher hears from beginning students is something like: “I have read the chapter and understand
all the concepts, but I don’t know where to start on the homework.” Since
“starting” for most beginners means getting to the “doing math” part, what
this really means is “I don’t know how to translate the problem and build a
model.” Simply knowing that these tasks are necessary is a good first step!
However, there are several things you can do to get started even when
feeling clueless. The first and most important is to draw a picture. Pictures
or diagrams are excellent starting activities partly because they focus your
attention on simplifying the problem situation. You can’t draw everything, so
what is important? This begins to help you form your model.
A picture is also an efficient way to communicate your translation and
modeling work. Simply draw an arrow attached to a bludger in your drawing and label it with a v
WB to avoid having to write something like “Let v
WB be
the velocity of the bludger.” To define a reference frame, simply draw coordinate axes on your picture. Circle objects and label the circle “system” to
quickly specify your system. Label the surface on which the zombies slide
as “frictionless” to state that assumption. I will show you some other useful
ideas for using a picture for time-saving communication as we go along.
Something else you can do to get started is to start with what you know
rather than what you don’t. For example, suppose I want to throw an empty
pen across the room into a wastebasket, and I’d like to know what initial
velocity to give it. There are so many possible things to consider in this situation. Does the pen’s mass matter? Its shape? Its composition? Its surface
texture? Whether it rotates or not? Does the massive water-cooler over there
exert enough gravitational force to make a difference? Does it matter that the
force of gravity points to the earth’s center, and so points in a bit different
direction near the wastebasket than near my chair? What about air resistance?
So starting with all of these questions is pretty daunting. Instead let’s
start with what we can do. Suppose we know how to calculate a point-like
particle’s trajectory when it is subject to a constant gravitational force. (If you
don’t already know how, you will by the end of unit N). So let’s start with
this. The question then becomes “Is this an adequate model for this situation?”
Well, we know from chapter C4 that an extended object responds to external
interactions as a particle would, so the particle part is fine. But our chosen
model specifies a uniform gravitational field, so the water-cooler’s effect and
the change in the gravitational force direction are moot: we must assume that
they are insignificant, because we can’t use the model if they aren’t. Since the
pen only touches the air after it has left my hand, the only possible external
interaction besides gravity that might affect its motion is air friction. Our
model assumes no other interactions and so only applies if friction is negligible. The pen’s composition, shape, texture, and rotation are only relevant
insofar as they might affect air friction, so all these aspects are moot if we
ignore friction. On the other hand, the pen’s trajectory will certainly depend
on its initial velocity direction (throwing it with any speed vertically upward
will not get it to the basket), so we’d better assume something about that:
suppose I throw it horizontally. Our chosen model says that the pen’s mass is
irrelevant, so we don’t have to worry about that.
We have therefore successfully connected our complex and realistic situation to an idealized physical model (a point particle moving in a uniform
gravitational field) that we can solve. We have also identified the plausible
approximations and assumptions we must make (uniform gravity, no air
friction, horizontal initial velocity). Our modeling work is basically done.
C5.2 How to Solve Physics Problems
73
My point is that choosing a model that one can solve and trying to match
it to the situation is easier than looking at the situation and trying to weed out
the complexities to arrive at the model. An incorrect choice of starting model
is quickly exposed if you think carefully about how to match the model to the
situation (a bad choice won’t match well). Your goal is to find the model that
(1) you can solve and (2) involves the fewest absurd assumptions.
Speaking of absurd assumptions, a well-known joke about physicists
appears in various forms but in outline goes like this. A physicist is consulted
about how one might increase milk production at a farm. When it comes time
to present the solution, the physicist begins by saying “Consider a spherical cow in a vacuum…” (see figure C5.1). This joke captures something true
about what physicists do: They first simplify a situation until it is solvable.
Then, they make the model more complicated if more realism is necessary.
A spherical cow in a vacuum (absurd as that sounds) may be a perfectly
appropriate first approximation if one needs (say) to roughly estimate how
much thermal energy a cow radiates to its environment. For calculating how
much force a 50-mph wind exerts on a cow, a “rectangular cow” approximation might be appropriate. The point is that even a crazy model you can solve
is better than a realistic model you can’t. Start bold and refine later.
The trick of starting with what you know means that knowing what
kinds of models you can solve is very important. Your goal in this course
should be to develop a model tool chest, which consists of a set of models
(for example, “a particle in a uniform gravitational field,” “conservation of
an isolated system’s momentum,” and so on) that you know how to deploy.
A person with an actual tool chest knows that when you see a nail, you pull
out a hammer, and when you see a screw, you pull out a screwdriver. As we
work through the course, you will develop an analogous set of model/tools
that you know how to use, and you will learn to recognize when to use them.
Knowing consciously that this is what you should be doing will help.
Many of these model/tools will involve what I call a master equation, an
equation that expresses the model’s essence. For example, the conservation
of momentum model has the following master equation:
W1i + p
W2i + ⋯ = p
W1f + p
W2f + ⋯
p
Figure C5.1
A spherical cow in a vacuum.
Credit: © Stocktrek Images, Inc./
Alamy.
Collecting a model tool chest
Master equations
(C5.1)
which says that an isolated system’s initial total momentum must be equal
to its final total momentum. Adapting this abstract master equation to your
concrete situation is another great way to get started on a problem. Doing
this focuses you on the questions that need answering in your chosen model.
What is my system? What do I have to assume to make it isolated? What does
my initial and final situation look like? What is object 1, object 2, and so on?
This is analogous to pulling out a tool and seeing if its business end matches
up with the screw or nail you need to drive.
Yet another way to get started (after you have defined some symbols) is
to list your knowns and unknowns by listing all defined symbols and setting each equal to its value (if known) or a question mark (if not).
Why is this valuable? Such a list provides a useful reference for later parts
in the problem (as we will see in a bit). But the most important reason for
creating such a list is that it is a mathematical fact that one needs as many equations as one has unknowns to completely solve a problem (unless an unknown
happens to cancel out). If you have more unknowns than equations (and the
unknowns don’t cancel out of the equations you have), then you will need
to bring in some more master equations, which usually means bringing new
models to bear on the problem. So knowing how many unknown quantities
you have to determine helps you know how many equations you need and
therefore when your modeling task is complete.
Listing knowns and unknowns
74
Do algebra only with symbols
Tracking units
These tricks’ foundations in
cognitive psychology
Chapter C5
Conservation of Momentum
The techniques of drawing a picture, choosing a familiar tool, adapting that
tool’s master equation, and listing knowns and unknowns are not only different
ways to get started but are also all necessary aspects of completing the modeling task. Once you have your model, though, several other tools can help you
bring your solution to a successful end.
First of all, one of the main reasons for defining symbols in the translation step is so you can do all algebra with symbols, not numbers. There are
two important reasons to do this. One is to save yourself work. Even if you skip
writing the number’s units (see below why this is bad), writing several digits is much more work than writing a single symbol. But a more important
reason is that you are much less likely to make errors (and can find them more
easily) if you work with symbols. You might be able to get away with using
numbers in a simple one-step problem, but in this course’s more complex
problems, one easily gets lost in a sea of digits. You can much more easily see
what you are doing when working with a handful of symbols.
In spite of these good reasons, I see people year after year spending 400%
more writing effort than necessary and making errors that are very hard to
spot because they only assign symbols to unknown quantities. When I have
asked people why they do this, they usually say that it helps them keep track
of what’s known and unknown. But a list of knowns and unknowns (see
above) does this just as well, and liberates you from all that writing.
A second trick for saving face is tracking units. You should never write
down a number anywhere in a problem solution without attaching its appropriate units. Omitting the units saves a few milliseconds of writing but sets
you up for disasters like the Mars Climate Orbiter (see chapter C1). When
you finally get past the algebra and start writing down numbers to calculate, due diligence with writing out and tracking units can really pay off in
another way as well. The units of your final result should end up being consistent with the type of quantity you are calculating. For example, if your
final result is a distance, its units should come out to being meters. Any other
units appearing in your calculation should cancel out. If they don’t cancel out,
you must have made an algebra error somewhere earlier, and you need to go
back to find it and fix it. This is a great way to discover such errors.
In spite of decades of doing algebra, I can’t tell you how many times
checking units has saved my personal posterior, even just in the last few
years. Indeed, I find this so personally useful that I have developed the habit
of mentally checking the unit consistency of symbolic equations as I write
them, so I don’t waste time writing a bunch of numbers or doing a calculation that can’t be right. This took me years to learn, so I don’t expect you to
do this right away (see the paragraph on chunking below), but it is an indication of how valuable tracking units can be for spotting errors.
Tracking units is not the only way to spot errors, of course. An absurd
magnitude or an unexpected sign are also good indicators of a modeling or
algebraic error, so you should check these as well. But I am emphasizing unit
tracking because it catches errors that these indicators don’t and because
I have found that students under-utilize this easy and powerful trick.
Let me close this section by noting some results from cognitive psychology. A person’s working memory contains about 7 ± 2 “chunks” of
information (such as digits, symbol meanings, etc.). The complexities in a
standard physics problem can very quickly overload this memory, and this
is one reason that beginners find such problems difficult. But even brilliant
physics problem-solvers are human beings with exactly the same working-­
memory limit. What experienced problem-solvers know that beginners don’t
is how to off-load information so it does not fill up that working memory but
remains easily accessible. The tricks above (diagrams, lists of knowns and
C5.3 Conservation of Momentum Problems
75
unknowns, working with symbols) are time-tested methods for doing
precisely this. Remembering even a single digit takes up about the same
amount of working memory as a symbol, so off-load all of those digits (and
the associated units) to a list of knowns, and work with the symbol. Don’t
try to worry about the algebra when you are constructing the model, and
once you have built the model, and have a set of equations to solve, forget about the model and work with the equations. Once you have a symbolic result, forget about the algebra and work with the numbers and their
units. Once you have a numerical result, then you can think about whether
it makes sense.
Beginning problem-solvers tend to get tied up in knots basically because
they try to do too much at once. The tricks I have outlined earlier can help
you group and off-load tasks so you can efficiently work with more limited
subsets of information that won’t overflow your memory.
So here are the seven tricks to solving physics problems: (1) Remember
that a problem has four parts. (2) Draw a picture. (3) Try a familiar model.
(4) Write a master equation. (5) List knowns and unknowns. (6) Do algebra
with symbols. (7) Track units. You now know why it is no accident that I have
listed seven items, but we can reduce this even further using a mnemonic that
scans like a sentence: “4 picturing models, master listing symbols and units.”
This sentence reduces the whole set to one memorable “chunk” that you later
parse into the seven chunks.
C5.3
A mnemonic: “4 Picturing
Models, Master Listing Symbols and Units”
Conservation of Momentum Problems
By the way, compiling many chunks into one is another trick experts use, and
is indeed the main point of collecting a model tool chest. Each “tool” in such
a collection compiles a detailed procedure for solving a given class of problem into a single “chunk.” The tool we are developing in this chapter solves
a class of physics problems called “conservation-of-momentum problems.”
With this metaphor in mind, let’s consider features of this tool.
As I mentioned in the last section, the master equation for all ­conservationof-momentum problems has the following general form
W1i + p
W1f + p
p
W2i + ⋯ = p
W2f + ⋯
(C5.1 again)
which says that an isolated system’s initial total momentum must be equal
to its final total momentum. This equation raises the core questions you
must answer to complete the modeling task in your solution: (1) What is
the system in this particular case? (2) What are its external interactions?
(3) How is it isolated? (4) What limits must be obeyed to achieve this isolation (that is, what do we have to assume or approximate to make the system
isolated)?
We also see that the master equation implies that there is an “initial” and
“final” situation, so (5) we should draw one diagram showing the “initial”
situation and one showing the “final” situation. The master equation also
makes it clear that momentum is a vector, so (6) we have to define a reference frame so we can specify vector components. This is most easily done
by drawing coordinate axes on each diagram. (7) When we adapt the master
equation for our particular situation, we should write it in column vector form,
because momentum is a vector. (Hmm, seven items, how curious …)
So our “conservation-of-momentum problem” tool item consists of the
master equation expressing conservation of momentum and seven associated tasks that help us lay out the model and solve it correctly. If we combine
The master equation for the
conservation of momentum
model
Chapter C5
76
Conservation of Momentum
these with the seven general tricks that apply to all problems, we get a twocolumn checklist that looks like the following:
Checklists for conservation of
momentum problems
C of M Checklist
❒ Describe the system.
❒ Describe its external interactions.
❒ Describe how it is isolated.
❒ Describe model limitations.
❒ Draw “initial/final” diagrams.
❒ Draw coordinate axes.
❒ Momentum is a vector!
General Checklist
❒ Define symbols.
❒ Draw a picture.
❒ Describe model and assumptions.
❒ Use a master equation.
❒ List knowns and unknowns.
❒ Do algebra symbolically.
❒ Track units. ❒ Check result.
Note that the left side mostly expands on the second and third items on the
right. Also the first item on the right lists only aspects of the four parts of a
problem solution that people most often forget.
I want to emphasize that when writing a solution you have lots of freedom in choosing how you accomplish all these tasks. You can do them with
words, pictures, cartoon balloons, or any combination of these (as I will illustrate shortly). But you can’t do it all with just equations.
Also, not every problem in this chapter requires doing every task on this
list. B and D problems tend to be more tightly focused on specific, smallerscale issues, so this checklist mostly applies to M and R problems. Even then,
not every such problem requires that every task be completed. For example,
in some cases, the problem statement may accomplish one or more of the
tasks for you! But with M and R problems in this chapter, if you omit an item
on either checklist, you should do this consciously.
C5.4
Examples
The following examples illustrate two significantly different ways to address
the items in the checklist. The colored comments indicate how the solutions
address the various items on the checklists.
Example C5.1
Initial and final
drawings
Problem: In the All-Alaska Ice-Floe Softball finals, the 62-kg pitcher for the
Homer Hypothermics throws her famous 31-m/s (69-mi/hr) fastball while
standing on very slippery ice. If she and the ball are at approximately rest
before the throw, how fast and in what direction is she sliding afterward?
(A softball has a mass of 0.25 kg.)
Solution “Initial” and “Final” pictures for this situation appear below.
z
Initial:
z
ball
pitcher
system description
external interactions
ice
mB
vP
v0 = 0
coordinate axes
symbols
defined
Final:
x
mB = 0.25 kg
mP = 62 kg
vB
v0 = 0
vB = 31 m/s
vP = ?
mP
x list of knowns
and unknowns
We will apply conservation of momentum to the system consisting of the
pitcher and the ball. This system participates in significant external interactions (a compression interaction with the ice and a gravitational interaction
C5.4 Examples
77
with the earth), but these interactions cancel. After throwing the ball, the
pitcher might also participate in a friction interaction with the ice and the
ball might participate with a friction interaction with the air, but we are told
that the ice is “very slippery” and air friction should also be pretty weak. If
we completely ignore these interactions, we can treat the system as functionally isolated. The worst-case scenario is that we treat this as a “collision”
(more like an inverse collision in the everyday sense of the word!) and note
that since friction is weak, the internal throwing interaction does not have
to be all that brief. The model should therefore be pretty good if we take the
pitcher’s and ball’s final velocities to be just after the ball is released.
In this particular situation, the model’s master equation becomes
vPx
│v
W B│
0
0
0 + mP v Py
mB 0 + mP 0 = mB
[0]
[0]
[ 0 ]
[ vPz ]
(C5.2)
(Note that I have assumed here and in the drawings that the ball’s final velocity is essentially horizontal, as is appropriate for a fastball.) We don’t know
the three components of the pitcher’s final velocity, but the three rows of the
vector equation provide three ordinary equations in these quantities, so we
have enough equations to solve. The y and z component equations tell us that
0 + 0 = 0 + mPvPy ⇒ vPy = 0
and (similarly) vPz = 0
P
column vectors for
objects’ momenta
a necessary
assumption stated
assessment of whether
we have enough equations to solve
(C5.3b)
all numbers have
units, and units
are tracked
Substituting in the numbers, we find that
)
master equation
adapted to the given
situation
all algebra done
with symbols
mB
0 + 0 = mB│v
WB│ + mPvPx ⇒ mPvPx = −mB│v
WB│ ⇒ vPx = − ___
WB│
m │v
(
assessment of model
limitations
(C5.3a)
while the x component equation tells us that
0.25
kg
m
__
vPx = − _______ 31 __
m
s = −0.13 s
62 kg
how the system
is isolated
(C5.4)
The pitcher’s final velocity is thus about 13 cm/s in the –x direction.
Note that the final units are appropriate for a velocity. The sign also
makes sense: because the system’s total momentum was zero initially, the
pitcher’s and ball’s final momenta must cancel, and thus need to be opposite.
The magnitude (about 5 inches per second) is also plausible.
Note that “doing algebra with symbols” does not preclude using simple
unitless numbers (such as 0 in this example). A single-digit (or even a twodigit) unitless number involves no more writing effort or conceptual overhead
than a symbol, so feel free to do algebra with numbers like these. (Indeed,
including such numbers in your equations is usually quite advantageous.)
Also, when counting equations, note that a vector equation’s three rows
count as three separate equations that you can use to determine unknown
quantities, but an unknown vector’s components count as three unknowns.
This example illustrates a solution where most items on the checklist
are addressed using verbal descriptions (except for the definition of symbols
and reference frame axes, which are done using the picture). This approach
is clearer and less ambiguous than other approaches (and is also easier to
typeset), so I have written almost all of the example and problem solutions
for this text in this verbal style. But it takes a lot of writing. The following
example illustrates a much more diagrammatic approach to writing a problem solution, which is often easier when using a pencil and paper.
final check of
units, sign, and
magnitude
It is OK to do algebra with
unitless numbers, too
I will generally use this
“­verbose” solution style
Chapter C5
78
Example C5.2
Initial and final
drawings
Conservation of Momentum
Problem: A 1000-kg car traveling west at 20 m/s hits an 800-kg car traveling
north at 16 m/s. The impact locks the two cars together. What is the magnitude and direction of their common velocity just after the accident?
list of knowns
and unknowns:
Solution
Initial:
Final:
y
m1 = 1000 kg
m2 = 800 kg
v1 = 20 m/s west
v2 = 16 m/s north
vf = ? θ = ?
mf = ?
y
vf
coordinate axes
θ
v1
symbols
defined
Road
Car 1
Contact
Earth
Car 2
(ditto)
C of M: collision
Master
Equations:
m1
m1 + m2 = mf
assume no
parts are shed
- v1
0
0
+ m2
0
v2
0
translate to
magnitudedirection
language
vfx
= mf vfy
vfz
momenta
­represented as
column vectors
vf = vfx2 + vfy2 + vfy2
θ = tan–1
vfx Implicit: six
unknowns
vfy (including │v
Wf│),
six equations
mf = m1 + m2 = 1000 kg + 800 kg = 1800 kg
algebra with
symbols alone
(ditto)
System
Interaction
Diagram:
Gravity
interaction diagram
specifies the system
and its interactions
cartoon balloons
specify the model
tool and/or assumption behind each
master equation
x
Compression
Friction
m1
v2
m2
mf
x
1000
kg
m1
m
__
Top row: −m1│W
v1│= mf vfx ⇒ vfx = −___
v1│ = −_______
20 __
m
mf │W
s = −11.1 s
1800
kg
(
)
800
kg
m2
m
__
2nd row: m2│W
v2│= mf vfy ⇒ vfy = + ___
v2│ = + _______ 16 __
m
mf │W
s = 7.1 s
1800
kg
(
__________
)
____________________
⇒ │W
vf│=
v 2fx + v 2fy + 0 =
(11.1 m/s)2 + (7.1 m/s)2 = 13.2 m/s
|
|
vfx
11.1 m/s
-1 ________
= 57°
⇒ θ = tan-1 ___
vfy = tan 7.1 m/s
| |
units included
and tracked
The wreck is therefore traveling at 13.2 m/s at an angle of 57° west of north
final check
just after the collision (plausible.)
This illustrates a diagramoriented solution style
Using cartoon balloons
This example illustrates pretty much the bare minimum of language for
a problem solution that I would still consider complete. The “final check’s”
single word is bolstered by the fact that the final velocity vector really is plausible (its units work out, it is in a believable quadrant, and its magnitude is
credible in that it is not bigger than the two cars’ incoming speeds).
The example illustrates the use of “cartoon balloons” to save writing by
attaching pithy explanatory comments to equations or to state assumptions.
C5.5 Airplanes and Rockets
This example also illustrates that “doing algebra with symbols” does not
preclude calculating intermediate results: you don’t have to wait until the
absolute end of the entire solution to plug in numbers. But be sure you do all
algebra operations with symbols (and maybe unitless numbers) alone.
Finally, the main reason that so few words are possible is that the “interaction diagram” conveys a lot of necessary information with a few lines and
circles. Such a tool is especially useful if we agree beforehand on a set of conventions: objects are labeled ovals; strong interactions are labeled solid lines;
ignored or weak interactions are labeled dotted lines; and a closed dotted
line encloses the system. You don’t have to use such a diagram, but you might
want to, because it is easy and conveys even more information than words.
79
It is OK to calculate
intermediate results
Conventions for
“interaction diagrams”
Exercise C5X.2
Draw an interaction diagram for the pitching situation in example C5.1.
Then, check the end of the chapter and compare with what I have.
(a)
C5.5
Airplanes and Rockets
It would be tragic if I did not close this chapter with a discussion of two of the
coolest modern technologies enabled by the momentum transfer principle
and conservation of momentum.
What keeps an airplane from falling? Textbooks and websites often
appeal to Bernoulli’s principle, which describes how the pressure of a fluid
(such as air) varies with flow speed. But we can answer this question more
directly and generally using conservation of momentum.
The shape of a typical airplane wing directs the airflow above the wing
somewhat downward in the end, since as the air moves over the wing, it must
follow the curve of the wing’s rear upper surface (as shown in figure C5.2a);
if it did not, there would be a vacuum above that surface. But if the interaction between the wing and air gives the air some downward momentum, it
must give the wing some upward momentum to conserve momentum. This
provides the lift that keeps the plane aloft.
This effect is enhanced if the wing is tipped upward as shown in
­figure C5.2b (aviators call this increasing the wing’s “angle of attack”), partly
because then even some of the air flowing under the wing is directed downward. (Even a rectangular plank provides lift when tipped upward, something
Bernoulli’s principle does not explain well.) The flaps that commercial-jet
pilots extend during take-off and landing also direct air downward. However,
both options also increase the friction the wing experiences while moving
through the air, and so are generally used only during take-off and landing,
when having extra lift at low speeds is more important than fuel economy.
Figure C5.2c vividly illustrates that wings really do push air downward.
It may comfort you to know that your airplane is supported by one of the
universe’s most fundamental principles!
Conservation of momentum also explains how a rocket can increase its
momentum even in space (where it seems that there is nothing to “push”
against). All rocket engines operate by pushing propellant backward at as
high a velocity as is possible. To do this, the rocket engine has to transfer
backward momentum to the propellant. The forward momentum of the
remainder of the rocket must then increase by the same amount to conserve
the system’s momentum (see figure C5.3 on the next page).
(b)
(c)
Figure C5.2
(a) This diagram shows the airflow
around the cross section of a typical airplane wing. Note how the
air flowing over the wing’s
top is deflected downward.
(b) The same wing at a higher
angle of attack. (c) The trough
that this Cessna jet leaves in the
clouds below it shows that its
wings do deflect air downward.
Credit: © Paul Bowen/Corbis.
80
Figure C5.3
A rocket works by pushing
propellant backward as rapidly
as possible. Since momentum
must be conserved, the rocket’s
forward momentum increases as it
transfers backward momentum to
the propellant.
Rocket performance depends
on exhaust speed
Electric rocket engines
Figure C5.4
Deep Space 1’s engine in action
during a test. Credit: NASA.
Specific impulse in seconds
Chapter C5
Conservation of Momentum
Initial:
Final:
Rocket
Propellant
Exhaust
In a standard liquid-fuel rocket, the rocket body consists of tanks holding
two substances that react energetically when combined (for example, liquid
hydrogen and liquid oxygen). These substances are sprayed into the rocket
engine nozzle and ignited. The resulting chemical reaction increases the temperature of the exhaust gases dramatically, which makes these gases expand
rapidly. Since they have nowhere to go except backward out of the nozzle,
they are propelled rearward with a large speed (commonly 2 to 3 km/s).
A natural quantity for describing rocket performance is impulse delivered
per unit mass of propellant. The greater this quantity is, the less propellant the
rocket has to carry to achieve the same change in momentum, which means
that the rocket also has less mass and needs less momentum change to reach
a given final speed. So, increasing the impulse delivered per unit mass doubly improves the rocket’s performance.
How can we increase this quantity? Consider a rocket engine that ejects
propellant at a speed of 2000 m/s. To do this, it must transfer 2000 kg·m/s of
backward momentum to each kilogram of fuel. Conservation of momentum
implies that this is also the magnitude of the forward impulse that the rocket
gets. The impulse delivered per unit mass is therefore (2000 kg·m/s)/kg =
2000 m/s, which is simply the exhaust speed! The crucial thing that determines a rocket engine’s performance is therefore its exhaust speed.
How can we increase the exhaust speed? In a chemical rocket, one can
do this by increasing the fuel combustion temperature. But this temperature
cannot be made too high, or the engine nozzle will melt. The best available
chemical rocket engines have an exhaust speed of about 4.5 km/s.
Electric rocket engines use electromagnetic fields to accelerate charged particles to very high velocities. The simplest kind of electric rocket engine is the
ion engine, which uses a simple electric field to accelerate ionized atoms. The
ion engine used by NASA’s Deep Space 1 probe (see figure C5.4), which visited
the asteroid Braille in 1999 and comet Borelly in 2001, ejected xenon propellant
at a speed of 31.5 km/s, achieving roughly 7 times better performance than a
chemical rocket. Similar ion engines power the NASA’s Dawn spacecraft (which
was launched in 2007 and which arrived at Vesta in 2011 and Ceres in 2015) and
the Japanese Hayabusa deep-space probe (which was launched in 2003, visited
the asteroid Itokawa in 2005, and successfully returned to earth with samples in
June of 2010). More advanced designs with exhaust velocities as high as 60 km/s
are currently being developed.
The best possible rocket engine would use matter and antimatter, which
when combined, annihilate each other to create pure energy in the form of
gamma rays, which can (at least in principle) be directed rearward. Gamma
rays travel at the speed of light c, so the impulse delivered per kilogram of
matter-antimatter fuel would be c = 300,000 km/s. Since no higher exhaust
speed is possible, this is the best a rocket engine can do. However, matter–
antimatter engines are still completely hypothetical for multiple reasons.
For historical reasons, rocket engine performance is often expressed as
impulse delivered per unit fuel weight (specific impulse), which comes out
in units of seconds (see problem C5D.1). The specific impulse (in seconds) is
9.8 times smaller than the exhaust speed (in meters per second).
Two-Minute Problems
81
TWO-MINUTE PROBLEMS
C5T.1 To which of the following two-object systems can
we apply conservation of momentum, and why? In each
case, answer “A” if we can apply conservation of momentum because the system floats in space, “F” if it’s because
the system is functionally isolated, “C” if it’s because the
system undergoes a collision, and “D” if momentum is not
conserved at all because the system is not isolated.
(a) Two magnetic hockey pucks slide on a flat plane of
frictionless ice. They attract each other as they pass,
changing each other’s trajectories without touching.
(b) An asteroid imbeds itself in a planet.
(c) An isolated star passes through a well-defined cloud of
gas, and is slowed by friction in this process. (Assume
that we can keep track of the cloud’s momentum.)
(d) Two people dance the tango.
(e) Two people riding personal hovercraft tug on each
other with a rope.
(f) A cannonball drops to the earth and lands with a thud,
burying itself in the ground.
C5T.2 When is friction a potential problem for applying
conservation of momentum to a system?
A. When friction is an external interaction
B. When friction is an internal interaction
C. In both cases
D. In neither case
C5T.3 A basketball bounces off the floor. It is difficult to
apply conservation of momentum usefully to the ball–
earth system in this case because
A. The system is not isolated.
B. A basketball does not bounce perfectly elastically.
C. Air friction is significant.
D. We can’t easily measure the earth’s velocity.
E. The law doesn’t apply to contact interactions.
C5T.4 The following diagrams show hypothetical results
for collisions between identical balls floating in space. One
ball was originally moving to the right along the dashed
line before striking the other ball at rest. (The collision was
not necessarily head-on.) The arrows depict the balls’ final
velocities. Which outcomes are physically believable? For
each case, answer “B” if the outcome is believable and “A”
if it is absurd.
(a)
(c)
(b)
(d)
C5T.5 The following diagram shows a collision between
identical balls floating in space. The balls have initial
velocities v
W1 and v
W2. After the collision, one of the balls has
velocity v
W3. Which of the displayed arrows most closely
corresponds to the final velocity of the other ball?
A
B
v3
C
v1
E
v2
D
F. The situation as described
is not physically possible.
C5T.6 If a change in nozzle design increases a given rocket
engine’s exhaust speed by a factor of two, by what factor does this increase or decrease the amount of propellant needed to get its payload to a specific final velocity?
(Assume the payload and engine mass is small compared
to that of the fuel, and choose the closest answer.)
A. 4
B. 2 __
C.
2
D. 1
E. 1/2
F. 1/4
The remaining two-minute problems all imagine a situation
where two hockey pucks with velcro rims are sliding on a
flat, horizontal plane of frictionless ice. One puck has twice
the mass of the other. They approach each other as described
in each problem, collide, and then stick together.
C5T.7 Initially, the light puck is moving east at 3 m/s
while the heavy puck is moving west at 2 m/s. The final
velocity of the conjoined pucks is
A. Eastward.
B. Westward.
C. Zero.
D. Impossible to determine.
E. Some other direction (explain).
C5T.8 Initially, the light puck is moving west at 4 m/s
while the heavy puck is moving south at 2 m/s. The final
velocity of the conjoined pucks is
A. West.
B. South.
C. Southwest.
D. Zero.
E. Some other direction (explain).
C5T.9
Initially, the light puck was moving south and the
final speed of the conjoined pucks is zero. The original velocity of the heavy puck must have been northward. T or F?
Chapter C5
82
Conservation of Momentum
HOMEWORK PROBLEMS
Basic Skills
Modeling
C5B.1 A person firing a rifle feels it recoil against his or her
shoulder. Explain why.
C5M.1 A pontoon boat with mass m1 sits at rest on a still lake
near a dock. Your friend, Dana, whose mass is m2, runs off the
end of the dock at a speed │v
W2│ and jumps onto the boat’s
deck. Dana does not know much physics and so is surprised
when the boat moves away from the dock.
(a) What is the boat’s speed just after Dana lands, expressed
as a fraction of │v
W2│?
(b) What is that speed if the boat weighs 1200 lbs, Dana
weighs 160 lbs, and Dana ran at 15 mi/h?
C5B.2 Initially, a cannon on wheels and cannonball are at
rest. The interaction between the two when the cannon is
fired delivers impulses to the cannon and cannonball that
are equal in magnitude but opposite in direction. If this
is so, why does the cannonball fly away at a large speed
while the cannon rolls backward at a much slower speed?
C5B.3 Suppose someone puts you at rest on a flat, utterly
frictionless surface. You cannot walk to the edge of the surface because your shoes will not grip it. Is there another
way to use those shoes to get off the surface? Explain.
C5B.4 Answer the question posed in problem C5T.4,
explaining your reasoning for each case you label absurd.
C5B.5
Do problem C5T.5 and explain your reasoning.
C5B.6 Draw an interaction diagram for an encounter
between a space probe and an asteroid, assuming that the
probe just snaps pictures as it passes and never touches the
asteroid. Also, how is this system isolated (if it is)?
C5B.7 Draw an interaction diagram for two hockey pucks
that bump into each other as they slide on ice. Also, how is
this system isolated (if it is)?
C5B.8 Consider two carts with nearly frictionless wheels,
one with a mass m1 and the other with a mass of m2 = 2m1.
The lighter one initially moves on a level surface at a speed of
│v
W0│ in the +x direction toward the other. After they collide,
W2│ =
we observe the massive cart to move at a speed of │ v
_ 5│
9 v
W0│ in the +x direction. What is the velocity v
W1 (magnitude
and direction) of the lighter cart after the collision? Express
the magnitude as a fraction of │v
W0│. (Hints: You do not
need to describe your model. Let’s stipulate that the total
momentum of the two-cart system is conserved because
the system is functionally isolated. You may also assume
that the problem is entirely one-dimensional, though you
still need to remember that momentum is a vector.)
C5B.9 A cart rolling on nearly frictionless wheels at an
initial speed of │v
W0│ in the +x direction on a level surface
collides with an identical cart initially at rest. After the collision, we observe the front cart to be moving in the +x direction with │v
W1│ = _ 65│
v
W0│. What is the velocity (magnitude and
direction) of the other cart? Express the magnitude as a
W 0│. (Hints: You do not need to describe your
fraction of │v
model for this problem. We will stipulate that the total
momentum of the two-cart system is conserved because
the system is functionally isolated. You may also assume
that the problem is entirely one-dimensional, though you
still need to remember that momentum is a vector.)
C5M.2 During the zombie apocalypse, you find yourself
sliding on a flat, nearly frictionless plane of ice with a
velocity of 2.0 m/s due east. Your mass is 60 kg. A zombie with a mass of 50 kg slides spastically but inexorably
toward you at a velocity of 3.2 m/s due south. You collide,
and horribly decayed hands begin to grope for your throat
as you slide together. Is there hope that you collectively
might collide with a wrecked car that is about 20 meters
away 37° east of south of you at the moment of collision?
(If so, the collision with the wreck might distract the zombie long enough to allow you to wriggle free.)
C5M.3 A bowling ball with known initial velocity v
W0 and
known mass M hits a pin with known mass m = _16 M at
rest. Just after the interaction, the ball’s velocity has been
deflected by an angle θ from its original direction of motion
and its speed reduced to │v
WB│ = _ 56 │
v
W0│.
(a) Find the components of the pin’s velocity v
WP. Express
your answers in terms of │v
W0│ and θ.
(b) Determine (in terms of θ) the angle ϕ that the pin’s
final velocity makes with the ball’s initial velocity.
C5M.4 You are captain of the Federation ship Execrable,
which is on the lookout for Zorellian smugglers that randomly emerge from a wormhole. You are coasting by the
wormhole at a certain constant velocity when a Zorellian ship with a mass close to your ship’s mass suddenly
emerges at a speed twice your ship’s speed and in a direction perpendicular to your path. You grab the ship with
a tractor beam, but the Zorellians are able to decode the
tractor-beam phase sequence in a few seconds and shrug
it off. They then activate their cloaking device, making their ship invisible. The interaction between ships
changed your velocity direction by 37° (though your speed
is unchanged). Determine the Zorellian ship’s final velocity components after the interaction in terms of your own
known initial speed, so that you know where to aim a disabling phaser shot (you know they can’t fire their engines
while cloaked). (Hints: The physics of the tractor beam is
irrelevant: momentum must be conserved even in futuristic physics. Also note that cos 37° = _ 45 and sin 37° = _ 35 : You
will probably find these fractions easier to write.)
C5M.5 In the All-Alaska Ice Floe Softball finals, the Nome
IceSox’s right fielder (who is floating on a small chunk
Answers to Exercises
of ice in still water) makes an outstanding catch of a
line drive. If the combined mass of the fielder and ice is
M = 540 kg, and it was traveling with a velocity v
W1 that is
0.15 m/s due north (due to the fielder’s frenzied paddling)
before the catch, and the ball has a mass of m = 0.25 kg and
W 2 = 32 m/s due east when
was traveling with a velocity v
caught, in what direction is the fielder finally moving just
after the catch? [Express this direction as an angle θ with
respect to either north or east.]
C5M.6 During the filming of a certain movie scene, the
director wants a small car (whose mass is m1) traveling due
east at speed │v
W1│ to collide with a small truck (whose mass
is m2) traveling north. The director also wants the collision
to be arranged so that just afterward, the interlocked vehicles travel straight toward the camera. If the line between
the camera and collision makes an angle of θ with respect
to north, at what speed │v
W2│ should the trucker drive?
C5M.7 An astronaut of mass m working on a satellite of
mass M = 20m accidentally releases a strong compressed
spring, which hurls him away from the satellite and knocks
him unconscious. The astronaut’s partner was working
inside their spaceship originally at rest 8 m from the satellite. She hears a strange noise on the radio link with the
other astronaut and she is trying to contact him when the
satellite bumps into the spaceship with a clang 20 s later.
Where should she look for the injured astronaut?
Derivations
C5D.1 For historical reasons, a rocket engine’s performance is often stated in terms of its specific impulse, which
is the impulse delivered per unit propellant weight (where
the propellant’s weight is measured at the earth’s surface).
(a) Argue that the units of specific impulse are seconds.
(b) Argue that a rocket engine’s specific impulse is proportional to the propellant’s exhaust speed and find
that constant of proportionality (magnitude and units).
(c) If a certain chemical rocket has an exhaust velocity of
4.5 km/s, what is its specific impulse?
C5D.2 (Challenging!) Consider a rocket initially at rest in
a reference frame in deep space. The rocket’s empty mass
is m = 5200 kg and it initially carries a mass 10m of propellant. The rocket’s engine can eject propellant at a certain
fixed rate dm/dt = 1300 kg/s ≡ µ at an exhaust speed of
83
W e│ = 3300 m/s relative to the rocket. What is the rocket’s final
│v
speed? [Hint: This problem is hard because the r­ocket’s
mass changes as propellant is ejected. Solve either mathematically using calculus, or numerically using a calculator
or computer application. If you do the former, ignore the
numbers and note that conservation of momentum implies
that the rate of change of the total momentum of the rocket
and the exhaust must be zero. If you do the latter, pretend
that each second the rocket ejects a 1300-kg “chunk” of
propellant, and use conservation of momentum to find the
x-velocity of the rocket (with its remaining propellant) at
the interval’s end. Repeat the calculation until no propellant remains. In both cases, note that the exhaust’s speed
in the frame is not generally │v
We│. Rather, if the rocket’s
x-­velocity is vx in that frame at a given instant, then the
exhaust’s x-velocity in that frame at that instant is vx - │v
We│].
Rich Context
C5R.1 An asteroid of mass M is discovered traveling at a
W 1│ directly toward Starbase Alpha, which floats in
speed │v
space. Lacking weapons of sufficient power to destroy the
asteroid, the frightened residents decide to deflect it by
hitting it with a remote-controlled spaceship. The spaceship has an empty mass of m ≈ M/106 and a top speed of
│v
W2│ ≈ 5│v
W1│ when its fuel is exhausted. The asteroid has to
be deflected so that by the time it reaches the starbase, its
center is at least a distance D away from its original path.
(a) What is the minimum time T before the asteroid’s projected impact that the spaceship must reach the asteroid? Explain your model and assumptions carefully.
(Lives are at stake here!)
(b) Calculate the time numerically if M = 2.6 × 109 kg,
│v
W1│ = 18 km/s, and D = 1800 m.
C5R.2 An astronaut repairing a communications satellite
floats at rest with respect to the astronaut’s spaceship, but
at a distance 22 m away from the open air-lock door. The
astronaut is not tethered to the ship, but instead uses a jet
pack to maneuver around the satellite. The jet pack suddenly fails. The astronaut wants to get back to the ship, but
does not want to push on the satellite, for fear of changing
its orbit. The astronaut has in hand a power tool, which has
a mass of about 0.45 kg. How can the astronaut use it to
get back to the ship? Describe your scheme carefully, and
estimate the time (within a factor of 2 or so) that it will take
to get back to the airlock using your method.
ANSWERS TO EXERCISES
C5X.1 The answers are:
1. A bowling ball strikes a pin: C
2. Two black holes in space coalesce: S
2. A car crashes into a tree: N
4. Two gliders on an air track connected by a spring: F
C5X.2 A possible diagram appears to the right. Each dashed
interaction line indicates a weak interaction.
Compression
Sliding friction
Interaction
Diagram:
Ice
Air
friction
Air
Air
friction
System
Pitcher
Gravity
Contact
Earth
Ball
(ditto)
C6
Conservation of
Angular Momentum
Chapter Overview
Section C6.1: Introduction
Just as the position-independence of the laws of physics implies that interactions
transfer momentum (which depends on an object’s rate of change of position), the
orientation-independence of those laws implies that interactions transfer something
called angular momentum (which depends on an object’s rate of change of orientation).
Section C6.2: Quantifying Orientation
To quantify a rigid object’s orientation about a given rotation axis, we can specify the
angle (in a plane perpendicular to the axis) that a line connecting a given particle with
the axis makes with some reference direction. For a rigid object, changes in θ will be
independent of one’s particular choice of particle or reference direction.
We quantify an angle by dividing a circle’s circumference into N parts and specifying how many of those parts the angle spans. Physicists often choose N = 2π, so that
θ (in radians) ≡ _ rs
(C6.2)
• Purpose: This formula defines an angle θ expressed in radians in terms of the
arclength s spanned by the angle along the circumference of a circle of radius r.
• Limitations: This is a mathematical definition.
The SI unit system considers angles to be unitless (no matter what N is selected). Even
so, one can use unit operators to convert between different angular “units.”
Section C6.3: Angular Velocity
W
We define a rigid object’s angular velocity ω
as follows:
ω
(
Figure C6.3
The definition of the direction of an
W
object’s angular velocity vector ω
.
| |
| |
dθ ≡
Δθ = │ rate of change of θ│
magnitude: │ω
W│ ≡ ___
lim ___
Δt
dt
W0 Δt
along the axis of rotation in the direction indicated
direction: by one’s right thumb if one’s right fingers curl in
the direction that particles in the object move
)
(C6.4a)
(C6.4b)
• Purpose: This equation defines a rigid object’s angular velocity ω
W in terms of
the rate of change of the object’s orientation angle θ, the direction of the object’s
axis of rotation, and the direction it rotates around that axis (see figure C6.3).
• Limitations: This is only useful for rigid objects.
• Note: ω is the Greek letter omega: it is not a “w.”
Since a given particle in a rigid object moves in a circle of radius r (where r is the particle’s distance from the axis) as the object rotates, the particle’s speed is
84
│v
W│ = r│ω
W│
(C6.6)
• Purpose: This expression links the ordinary speed │v
W│ of a particle or object
moving in a circle of radius r to the object’s angular speed │ω
W│.
• Limitations: This formula assumes that we express │ω
W│ in radians/s.
Section C6.4: The Angular Momentum of a Rigid Object
If we define angular momentum L
W so that interactions between rotating objects transfer angular momentum, then we find empirically that
W = I ω
W where
L
I = ∑mi r 2i = α MR2
(C6.10a,b)
• Purpose: These equations specify the angular momentum L
W that a rigid symmetric object rotating with angular velocity ω
W contains. I is the object’s moment
W
of inertia around the rotation axis specified by ω
, mi is the mass of the object’s
ith particle, ri is the distance that particle is from the axis, and the sum is over all
particles. M is the object’s mass, R is the largest distance that any of its particles
is from the axis, and α is a unitless constant (0 ≤ α ≤ 1) that depends on the
distribution of mass within the object.
• Limitations: The object must be both rigid and symmetric for rotations around
W
the axis specified by ω : every particle on one side of the axis must have a partner with the same mass at the same distance perpendicularly across the rotation axis. All particles must also move much slower than the speed of light.
W
W
• Notes: These equations assume that ω
is in rad/s. L
has units of kg·m2/s.
Section C6.5: Twirl and Torque
Just as force expresses the rate at which an interaction A delivers impulse [Δp
W]A to an
W
object, so torque τ
WA expresses the rate at which that interaction delivers twirl [Δ L
]A :
W]A [dL
W]A
[ΔL
WA ≡
τ
lim ______
≡ _____
Δt 0
Δt
dt
W
(C6.14)
• Purpose: This equation defines the torque τ
WA that an interaction A exerts on an
W]A that interaction delivers to the
object at an instant in terms of the twirl [ΔL
object during a time interval ∆t centered on that instant.
W]A/Δt to accurately express the torque for any
• Limitations: For the ratio [ΔL
W
finite interval ∆t, ∆t must be small enough that τ
A ≈ constant during ∆t.
A torque’s direction specifies the axis around which the interaction wants to make the
W
object rotate. A torque applied parallel or opposite to an object’s L
causes that object
to rotate faster or slower (respectively), but a torque acting in an arbitrary direction
W
generally also causes the direction of L
(and thus the object’s rotation axis) to change.
Section C6.6: Gyroscopic Precession
In particular, if an applied torque is always perpendicular to both an object’s angular
momentum L
W and a given fixed direction, the object will exhibit gyroscopic precession:
W
the tip of its angular momentum L
moves in a circle about the fixed direction, with
W
W
│L
│
and L
’s angle relative to that fixed direction remaining constant.
Section C6.7: Conservation of Angular Momentum
Because interactions transfer angular momentum, an isolated system’s total angular
momentum is conserved. This section discusses several applications.
85
Chapter C6
86
C6.1
Interactions also transfer
angular momentum
Axis
Rigid
object
P
θ
Reference
direction
Figure C6.1
Quantifying a rigid object’s orientation around a fixed axis.
∆s
s
r
N marks
Introduction
In chapter C5, we saw that the idea that interactions transfer momentum
implies that an isolated system’s total momentum is conserved, and I claimed
that this is a consequence of the symmetry principle that the laws of physics
are independent of one’s position in the universe. Similarly, the symmetry
principle that the laws of physics are independent of one’s orientation relative
to the universe implies that interactions transfer something called “angular
momentum” and that an isolated system’s angular momentum is conserved.
This chapter introduces this very important quantity.
Just as an object’s momentum is related to its velocity (that is, the rate at
which it changes its position), its angular momentum is related to the rate at
which it changes its orientation. Therefore, we will start by discussing how we
can quantify an object’s orientation and that orientation’s rate of change.
C6.2
r
Conservation of Angular Momentum
θ
axis
circle
Quantifying Orientation
Consider a rigid object that can rotate around a certain fixed axis, and consider an arbitrary particle P a distance r from that axis. As the object rotates,
this particle will move around a circle of radius r about the axis, and that
circle’s plane will be perpendicular to the axis, as shown in figure C6.1.
Consider now the angle θ (in the circle’s plane) that a line connecting
our particle P to the axis makes with some arbitrary reference direction (see
the figure). As the object rotates, only θ changes, not the particle’s distance
r from the axis or the plane of its rotation. Now, because the object is rigid,
the change in θ is the same for every particle, no matter how we define the
reference direction. Thus, a change in θ can describe the change in the whole
object’s orientation as the object rotates around a fixed axis, independent of
the particular particle and particular reference direction we use to define θ.
Let’s pause to remind ourselves how we quantify an angle θ. An angle
is defined by two lines that intersect at a point (in this case, the reference
direction line and the line from the axis to P, which intersect at the axis). Any
method for quantifying that angle boils down to drawing a circle of some
radius r around the point of intersection and expressing what portion of the
total circle’s circumference lies between the lines. We do this by dividing that
circumference into N equal parts and seeing how many marks fit between
the reference direction and the particle’s position, as shown in figure C6.2.
This is what a protractor does: the protractor’s edge defines a circle whose
circumference is divided into (usually) 360 equal parts; we then observe how
many of these marks fit between the two lines whose angle is θ.
A circle of radius r has a circumference of 2πr, so dividing that circumference into N parts means that each part spans an arclength of ∆s = 2πr/ N. If
an arclength s along the circumference fits between the two lines that define
our angle, then the number of marks between the lines will be
θ (in marks) = ___
s = ___
N _s
Δs 2π r
Figure C6.2
Quantifying an angle using a generalized protractor.
(C6.1)
The expression above works for any number of equally spaced marks,
but there are really only three traditional choices for N. If we choose N = 360
(following the ancient Babylonians), then we get the angle in “degrees;” if
we choose N = 1, we get an angle in fractions of a “revolution;” if we choose
N = 2π, we get an angle in “radians.” Physicists usually use the radian because
when we choose N = 2π, the formula above becomes especially simple:
C6.3 Angular Velocity
87
θ (in radians) ≡ _ rs
(C6.2)
• Purpose: This formula defines an angle θ expressed in radians in terms
of the arclength s spanned by the angle along the circumference of a
circle of radius r.
• Limitations: This is a mathematical definition.
Now, whether we express an angle in degrees, radians, or revolutions,
the official position of the SI unit committee is that angles are unitless, because
θ in equation C6.1 is a ratio of distances multiplied by the unitless number
N/2π. Angular “units” such as the “degree,” “radian,” and “revolution” are
thus different than “real” SI units in that (because they are unitless measures)
they may appear or disappear in a calculation at will. For example, an angle’s
rate of change dθ/dt has SI units of either rad/s or simply 1/s. Also, one cannot tell by looking at an equation what angular “units” to use.
The reason that physicists use the radian almost exclusively is that equation C6.2 is simpler than equation C6.1, and physics equations regarding rotating
objects take advantage of (and thus assume) this simplicity. Therefore, to be safe,
Angles are unitless
In a physics formula, you should assume that any symbol for an angular
quantity represents a value expressed in radians (unless clearly specified
otherwise).
If a problem specifies quantities in other angular “units,” you can still convert
them to radians using unit operators as if they were real units. For example,
(
)
θ = 25° = 25° ______
2π rad
= 0.44 rad
360°
(C6.3)
Exercise C6X.1
Imagine an object is rotating at a rate of 0.3 rev/s. What is this in rad/s?
C6.3
Angular Velocity
Now, consider again the rotating object shown in figure C6.1, and recall that
changes in the orientation angle θ do not depend on our choice of particle or
reference direction. We define an object’s angular velocity ω
W as follows
| |
| |
dθ ≡
Δθ = │ rate of change of θ│
magnitude: │ω
W│ ≡ ___
lim ___
Δt
dt
W0 Δt
(
(C6.4a)
The definition of
angular velocity
ω
)
along the axis of rotation in the direction indicated
direction: (C6.4b)
by one’s right thumb if one’s right fingers curl in
the direction that particles in the object move
• Purpose: This equation defines a rigid object’s angular velocity ω
W in
terms of the rate of change of the object’s orientation angle θ, the direction of the object’s axis of rotation, and the direction it rotates around
that axis (see figure C6.3).
• Limitations: This is only useful for rigid objects.
• Note: ω is the Greek letter omega: it is not a “w.”
Figure C6.3
The definition of the direction of an
W
object’s angular velocity vector ω
.
Chapter C6
88
∆s = r∆θ
v
∆θ
r
Since we define angular velocity ω
W with a reference to a human right
W
hand, ω
may seem to you to be a more arbitrary and artificial quantity than
the ordinary velocity vW. However, it is worth remembering that both are
human inventions. Both seek to express in mathematical language what we
need to know about how an object moves. Think of ω
W as being a fiendishly
clever scheme for encoding into a compact and familiar mathematical package (a vector) everything we need to know about an object’s rotation: its rotation rate, the axis of rotation, and the direction it rotates around that axis.
We can compute the ordinary speed │v
W│ of a particle or point in a rotating
object as follows. Consider a particle moving in a circular path of radius r, as
shown in figure C6.4. Its speed at any instant is │v
W│ =
lim │
Δs/Δt│ ≡ ds/dt,
Δt
W0
where ∆s is the arclength the particle covers during a time
interval ∆t centered on the instant. If θ is in radians, then the arclength ∆s is equal to r ∆θ, so
│ Δt │
The ordinary speed of a particle moving in a circular path
│ Δt │
│ Δt │]
Δθ = r│ω
│v
W│ =
lim ___
Δs =
lim ____
r Δθ = r
lim ___
W│
Δt
W0
Figure C6.4
A particle moving in a circular
path of radius r.
Conservation of Angular Momentum
Δt
W0
[ Δt
W0
(C6.5)
by definition of │ω
W│ (see equation C6.4a). Thus, if we know a particle’s angular speed as it moves in a circle of radius r, we can calculate its ordinary speed.
This is an important result that will be useful to us in many contexts:
│v
W│ = r│ω
W│
(C6.6)
• Purpose: This expression links the ordinary speed │v
W│ of a particle or
object moving in a circle of radius r to the object’s angular speed │ω
W│.
• Limitations: This formula assumes we express │ω
W│ in radians/s.
In the specific case of a particle or point in a rotating rigid object, r will be the
distance that the particle or point is from the object’s axis of rotation.
C6.4
A review of the definition of
ordinary momentum
An analogous definition of
angular momentum
Limits of this definition
The Angular Momentum of a Rigid Object
In chapter C2, we defined momentum to be the vector quantity associated
with an object’s motion through space that is transferred during an interaction between two moving objects. The existence of such a quantity follows
from Noether’s theorem and the position-independence of the laws of physics. Using this definition, we find empirically that the momentum that an
object contains by virtue of its motion is proportional to the object’s velocity:
W, where m (the object’s mass) is the constant of proportionality.
p
W ≡ mv
Analogously, we here define angular momentum to be the vector quantity associated with an object’s rotation that is transferred in an interaction
between two objects. The existence of such a quantity follows from Noether’s
theorem and the orientation-independence of the laws of physics. We find
empirically that the angular momentum L
W (defined this way) that a (suitably
symmetric) rotating rigid object contains by virtue of its rotation is proporW
tional to its angular velocity ω . We define the rotating object’s moment of
W
W.
inertia I to be the constant of proportionality, so that L
≡ I ω This otherwise lovely parallelism is spoiled by a few inconvenient complications. For example, this description of angular momentum only applies
to a rigid object (the only kind of system that has a well-defined angular velocity ω W ). Moreover, we empirically find that L
W is parallel to ω
W only if an object
is symmetric around the axis of rotation in the sense that for every particle in
C6.4 The Angular Momentum of a Rigid Object
89
the object, then on the other end of a line that goes from the particle through
the axis and perpendicular to that axis, we also have an identical balancing
particle the same distance from the axis (see figure C6.5).
Chapter C7 presents a more comprehensive definition of angular momentum that explains these limitations and allows us to handle more general
cases. However, the mathematics involved can obscure the basic simplicity
of the angular momentum concept. Moreover, a “rigid symmetric object” is
a decent model for many rotating objects in the universe, so by temporarily
limiting ourselves to such objects, we can easily explore practical applications that will help build our intuition about angular momentum.
The definition of a symmetric object given earlier means that we can
assume any symmetric rigid object is comprised of a large number of pairs of
opposing particles of the type shown in figure C6.5. This allows us to calculate the value of I as follows. We find empirically that the angular momentum
we should assign to such a particle pair is given by the expression.
Wpair = 2mr2 ω
W
L
ω
r
N/2
j=1
j=1
[
N/2
]
axis
Figure C6.5
A pair of opposed identical particles. Any symmetric rigid object
is comprised of a set of such pairs.
Calculating a rigid object’s
moment of inertia
mj
ω
rj
rj
mj
(C6.8)
where the o-notation defined above simply provides a compact way of writing lengthy sums. Because all pairs in a rigid object have the same angular
W
velocity ω
, we can pull this quantity out of the sum in the last step. Since we
W, the quantity in
are defining the object’s moment of inertia I so that L
W ≡ I ω
square brackets is I. Since each pair consists of exactly two identical particles,
N/2 pairs
O
(C6.7)
W = L
W
W
L
1 + L
W2 + ⋯ + L
WN/2 ≡ ∑L
Wj= ∑ 2 mjr 2j ω
W = ∑
2 mjr 2j ω
j=1
m
m
W
where ω
is the pair’s common angular velocity around the axis, m is the mass
of each particle and r is the distance that each is from the axis of rotation.
(This is another formula that assumes that │ω
W│ is in radians per second.)
Now consider a rigid object comprised of N particles in N/2 such pairs,
(see figure C6.6). If mj is the mass of each particle in the jth pair and rj is the
distance each is from the axis, then the object’s total angular momentum is
N/2
r
Figure C6.6
The jth particle pair in a rigid
­symmetric object.
N particles
I = ∑ 2mjr 2j = ∑ mir 2i
j=1
(C6.9)
i=1
this equation enables us to predict a symmetric object’s moment of inertia I.
If we define R to be the most distant particle’s distance from the axis, then
ri ≤ R for every particle and I ≤ MR2, where M is the object’s total mass. Therefore, we can write I = αMR2, where α is a unitless quantity between 0 and 1.
The value of α will be close to 1 if most of the object’s mass lies nearly a distance R from its center (as, for example, in a hoop of radius R), but becomes
smaller as a larger fraction of the object’s mass lies closer to its center.
We will see later that I is also useful for calculating a rigid object’s energy
of rotation and we will then discuss some basic techniques for calculating
­moments of inertia based on equation C6.9. For our present purposes, however, you can use figure C6.7, which lists values of α for various simple shapes.
Hollow pipe or hoop
R
α=1
Figure C6.7
Hollow ball
R
α = 2/3
Values of α for various simple rotating shapes.
Solid disk or cylinder
R
α = 1/2
Solid sphere
Thin rod
R
α = 2/5
R
α = 1/3
Chapter C6
90
Conservation of Angular Momentum
Note also that if a symmetric object consists of distinct parts, we can
divide the summation over all particles into separate sums over each part.
Therefore, an object’s total I around a given axis of rotation is the simple sum
of the moments of inertia for its parts around the same axis. We can thus calculate the moment of inertia of a complicated shape by modeling it as a sum
of simple shapes whose moments of inertia we know.
So, in summary, for the special case of a rigid symmetric rotating object,
The angular momentum of a
rigid symmetric rotating object
W = I ω
W
L
where
I = ∑mi r 2i = αMR2
(C6.10a)
(C6.10b)
W
• Purpose: These equations specify the angular momentum L
that a rigid
W
symmetric object rotating with angular velocity ω
contains. I is the
W
object’s moment of inertia around the rotation axis specified by ω
, mi
is the mass of the object’s ith particle, ri is the distance that particle is
from the axis, and the sum is over all particles. M is the object’s mass, R
is the largest distance that any of its particles is from the axis, and α is
a unitless constant (0 ≤ α ≤ 1) that depends on the distribution of mass
within the object.
• Limitations: The object must be both rigid and symmetric for rotations
around the axis specified by ω
W. Every particle on one side of the axis
must have a partner with the same mass at the same distance perpendicularly across the rotation axis. All particles must also move much
slower than the speed of light.
W
W
• Notes: These equations assume that ω
is expressed in rad/s. L
has units
2
of kg·m /s.
Example C6.1
Problem: Find the value of α for a symmetric dumbbell consisting of a rod
of mass m connecting two small, dense balls. The mass of each ball is 4m and
each is a distance R from the rod’s center. Assume this object rotates around
an axis perpendicular to the rod that goes through the rod’s center.
Solution We can divide the sum over all particles in equation C6.10b into
separate sums over the particles in each ball and those in the rod:
I = ∑mi r 2i =
∑ mir 2i +
∑ mi r 2i + ∑mi r 2i
all
ball 1
ball 2
rod
(C6.11)
Assuming that each ball is small compared to R, the particles in each ball
are all very nearly the same distance R from the axis, so for each ball,
∑mi r 2i ≈ R2 ∑mi = 4mR2. According to figure C6.7, the moment of inertia of
the rod is _ 13 mR2. Note also that the object’s total mass M = 4m + 4m + m = 9m.
Therefore, the whole object’s moment of inertia is
I = 4mR2 + 4mR2 + _ 13 mR2 = ( _49 M + _ 49 M + __
271 M )R2
12
= ( __
+ __
12
+ __
271 ) MR2 = __
25
MR2 ⇒ α = __
25
27
27
27
27
This is in the range 0 ≤ α ≤ 1, which is the required range for α.
(C6.12)
C6.5 Twirl and Torque
91
Exercise C6X.2
Consider a disk of mass m and radius R with hemispheres (each with mass
m and radius R/2) glued to the disk’s top and bottom as shown to the right.
What is α when this object rotates around the axis shown?
C6.5
axis
disk,
mass m
1
2
R
hemisphere,
mass m
R
Twirl and Torque
An interaction between two objects transfers angular momentum from one
to the other just as it transfers ordinary momentum. Let’s call the amount of
angular momentum that an interaction A contributes to an object during a
time interval ∆t the twirl [Δ L
W]A that interaction delivers. As in chapter C2,
you should read [ ]A as “the contribution that interaction A makes to” whatever is enclosed—in this case, the change in the object’s angular momentum
W. The net change Δ L
L
W in the object’s angular momentum during ∆t is the vecW
W
W
tor sum of the twirls [Δ L
]A, [Δ L
]B, [Δ L
]C, … that it receives from interactions
A, B, C, … during that interval:
W
W
W
W
Δ L
= [Δ L
]A + [Δ L
]B + [Δ L
]C + ⋯
(C6.13)
Twirl [Δ L
W] is thus to angular momentum what impulse [Δ p
W] is to ordinary
momentum. (The quantity [Δ L
W] has no widely accepted name or notation,
though it should. “Twirl” is my invention for making clearer parallels between
angular momentum, ordinary momentum, and as we will see, energy.)
Just as the force on an object expresses the rate at which an interaction
W
delivers impulse to that object, so torque τ
(where τ is the Greek letter tau)
expresses the rate at which an interaction delivers twirl:
W]A [dL
W]A
[ΔL
WA ≡
τ
lim ______
≡ _____
Δt
dt
W0 Δt
The definition of twirl
The definition of torque
(C6.14)
• Purpose: This equation defines the torque τ
WA that an interaction A exerts
W]A that interaction
on an object at an instant in terms of the twirl [ΔL
delivers to the object during a time interval ∆t centered on that instant.
W]A/Δt to accurately express the torque
• Limitations: For the ratio [ΔL
W
for any finite interval ∆t, ∆t must be small enough that τ
A ≈ constant.
What is the torque vector’s direction? We can infer that direction by seeing what a torque does if it acts alone on an object that is initially not rotatW
ing. Suppose an interaction exerts a constant torque τ
on such an object for
a time ∆t. Because the interaction supplies twirl at a constant rate, the total
twirl it delivers during ∆t is [Δ L
W] = τ W Δt. If this interaction alone exerts
torque on the object and if the object’s angular momentum L
W = 0 initially,
then L
W at the end of ∆t is equal to the twirl delivered: L
W = [Δ L
W]. If the object’s
moment of inertia is I, then the object’s final angular velocity ω
W is such that
W
W = L
W
I ω
= [Δ L
W] = τ Δt. As I and ∆t are both positive numbers, we see that
W is parallel to τ
ω
W in this case. So, by the definition of the angular velocity,
we can say that the torque vector’s direction points along the axis around
W
which the torque wants to twist the object (and does twist the object if L
=0
initially). The torque vector points in the direction indicated by your right
thumb when your right fingers curl around the axis in the way that the torque
wants the object to twist.
The direction of the torque
vector
Chapter C6
92
Conservation of Angular Momentum
Equations C6.13 and C6.14 also imply that if an object already has an
angular momentum L
W at time t and an interaction exerts a torque τ
W on the
object (and no other interactions exert any torques), then the object’s angular
momentum after an infinitesimal time interval dt is
W (at t + dt) = L
L
W (at t) + τ W dt
(C6.15)
We see that if the interaction exerts a torque that points in the same direction as the object’s angular momentum, its angular momentum gets larger,
and so the object’s rotation rate increases. If the torque is opposite to the
object’s angular momentum, the object will slow down. If the torque points
in any other direction, though, it will generally change both the magnitude
and direction the object’s angular momentum (and thus its angular velocity).
C6.6
z
L sinθ
L
SIDE
VIEW
Lz
= L cosθ
Top
θ
Table
O
Figure C6.8
A side view of a spinning top. The
gravitational torque τ
Wg on this
top always points perpendicular
W and the
to the plane containing L
W
vertical axis (that is, τ
is into the
plane of the drawing here).
TOP
VIEW
[∆L]g
O
L sin θ
L
Figure C6.9
A top view of the same top.
Successively delivered horizontal
W]g, each perpendicular to
twirls [∆L
W
W to move in a
L, cause the tip of L
horizontal circle around the z axis.
Gyroscopic Precession
A torque exerted on an already-rotating object that is not parallel to the
­object’s axis of rotation can cause the object to behave in pretty funky and
counterintuitive ways. An important example with many applications in
physics is the phenomenon of gyroscopic precession.
Consider a symmetrical top spinning on a table and assume that at a
certain time the top is leaning to one side, so its axis of rotation (and thus
its angular momentum L
W) makes an angle θ with respect to the vertical, as
shown in figure C6.8. The gravitational interaction between the earth and
the top wants to make the top fall over, or more precisely, rotate clockwise
around a horizontal axis through the point O where the top touches the table.
Therefore, as you can check with your right hand, the torque τ
Wg applied
by this interaction points directly into the plane of the picture, perpendicular
to both the plane that contains the top’s angular momentum L
W and the z axis.
Because no matter how the top leans, the torque must always point perpendicular to both the plane containing L
W and the vertical axis, we can be assured
W
that this torque is always both horizontal and perpendicular to L
.
In a given tiny time interval ∆t, this torque will deliver a tiny twirl
[Δ L
W]g ≈ τ
Wg Δt in a horizontal direction perpendicular to L
W, and (assuming
no other torques act), this will be equal to the change Δ L
W in the top’s angular momentum. As shown in figure C6.9, a succession of such twirls will
cause the tip of L
W (and thus the top’s rotation axis) to move in a horizontal
circle around the vertical axis. We call this motion gyroscopic precession.
The top’s axis of rotation therefore circles the vertical axis instead of falling
over. (The current article on “precession” in Wikipedia has a nice animation.)
Indeed, note that because the torque is exactly horizontal, [Δ L
W]g has a
zero z component, so it contributes nothing to the angular momentum’s
vertical component Lz. Moreover, because [Δ L
W]g is also perpendicular to L
W,
it does not contribute anything that would change the magnitude of L
W, only its
direction. If no other torques act on the top, then both │L
W│ and Lz are constant in
W
this case, as is angle θ between L
and the vertical (as │Lz│ =│L
W│cos θ). The
gyroscope will therefore precess forever.
Realistically, friction from the contact interaction between the top and
table exerts an additional torque on the top that is opposite to the top’s angular
momentum, slowing its rotation. This frictional interaction contributes twirls
that are neither horizontal nor perpendicular to L
W, so the behavior described
in the previous paragraph is not precisely observed with real tops. However,
if the frictional torque is small compared to the gravitational torque, the top
will exhibit nearly perfect gyroscopic precession for a long time before eventually slowing down and toppling over.
C6.7 Conservation of Angular Momentum
A spinning object exhibits gyroscopic precession any time that the only
significant torque acting on it is perpendicular to both the object’s angular
momentum and some fixed direction. For example, the spinning earth experiences a gravitational torque from the moon, because (1) the earth is oblate
(has a bigger equatorial radius than a polar radius) and (2) its axis of rotation
is tilted with respect to the moon’s orbit. The earth’s gravitational interaction
with the moon pulls a bit harder on the closer part of the earth’s equatorial
bulge than on the farther part, thus exerting a torque on the earth that seeks
to twist the earth’s axis to align with the z axis in figure C6.10. This torque lies
in the plane of the moon’s orbit (and so perpendicular to the fixed direction
that is perpendicular to that plane) and is also perpendicular to the earth’s
angular momentum, so it causes the earth’s axis to precess relative to the
fixed stars. The earth’s gravitational interaction with the sun exerts a similar
torque. Together they cause the earth’s axis to precess once every 26,000 years.
This causes two observable effects that were noticed by ancient astronomers but not understood until Newton. One is the movement of the celestial
poles (the points around which the stars seem to rotate in the sky, which is
the projection of the earth’s axis on the sky). Currently, the fairly bright star
Polaris (the “North Star”) happens to be within 0.5° of the north celestial
pole, but about 5000 years ago, a star known as Thuban served this role. At
most other times, no reasonably bright star is closer than a few degrees to the
pole. We therefore happen (?) to live in a lucky time for navigation.
The other effect is the so-called precession of the equinoxes. The direction of the spring equinox in the sky lies on the intersection between the
plane of the earth’s equator and the plane of the earth’s orbit around the sun
(which is pretty close to the plane of the moon’s orbit around the earth). As
the earth’s rotation axis precesses, the earth’s equatorial plane projected onto
the sky also precesses, so the position of the spring equinox moves around.
In ancient times it was in the constellation Taurus, but now is in Pisces, and
within a few hundred years (depending on how you define the constellations’ edges) it will move into Aquarius (starting the “Age of Aquarius”).
How rotating objects respond to torques has implications for the design
and/or behavior of many things, including helicopters, gyrocompasses,
bicycles, motorcycles, Frisbees, and boomerangs (which return because of
gyroscopic precession). Precession will also play a crucial role in chapter Q6.
C6.7
93
Implications and applications
of gyroscopic motion
z
2
ω
F2
toward the
distant
moon
1
F1
Figure C6.10
Since the gravitational force that
the moon exerts on the bulge at
point 1 is larger than the force
­exerted at point 2, the moon
exerts a torque on the earth that
seeks to align the earth’s ­rotational
axis with the z axis shown.
Other applications of
gyroscopic precession
Conservation of Angular Momentum
Since interactions transfer angular momentum, a system’s internal interactions will not change its total angular momentum. Therefore, the total angular
momentum of an isolated system will be conserved. The three general classes of
isolated systems we discussed in chapter C5 (systems that float in space, are
functionally isolated, or involve a collision) are useful here, with the qualifier that a system is functionally isolated with regard to angular momentum
if external interactions deliver no net twirl to (or, equivalently, exert no net
torque on) any of the objects involved.
The two-column checklist for conservation of angular momentum (CAM)
problems is almost the same as for conservation of momentum problems (see
chapter C5). Figure C6.11 shows the column specific to CAM problems.
As before, you need to identify the “isolated system,” and decide how
(and to what degree) it is isolated. In many practical cases where a system
is not in deep space, a system may be isolated only for rotations around a
certain axis. In such a case, the component of angular momentum along that
axis (often the z axis) is conserved, and we can ignore other components.
The total angular momentum
of an isolated system is
conserved
CAM-Specific Checklist
❒ Describe the system.
❒ List its external interactions.
❒ Describe how it is isolated.
❒ State limits imposed.
❒ “Initial/final” diagrams.
❒ Draw coordinate axes.
❒ L
W is a vector!
Figure C6.11
Checklist for CAM problems.
94
Chapter C6
Two general types of conservation of angular momentum
problems
CAM problems fall into two general types: (1) where the system consists
of a single object whose moment of inertia changes between its initial and final
states and (2) where parts of a system having different angular momenta interact. The “master equation” in either case should express conservation of the sysW
W
tem’s total angular momentum: L i = L
f (or if only the z component of angular
W
W to
momentum is conserved, Lzi = Lz f ). One can then use the formula L
= I ω
express the angular momentum of either the system or its parts in terms of more
basic quantities, though it is wise to consider any assumptions or approximations involved in modeling the system (or part) as a rigid and symmetric object
because this formula assumes it is (at least initially and finally).
The following example illustrates a problem of the first type. Note the
comments in colored type about various features of the solution.
Example C6.2
(a) Initial:
Symbol
definitions ωi
pod, rod
mass
m
Frame axis
hydraulic
cylinder
R
central
column
Discussion
of isolation
(b) Final:
Initial
and final
diagrams
z
Assumptions
(limitations)
ωf
Symbol
definition
Discussion of
knowns and
unknowns
Problem: In a certain amusement park ride, passenger-carrying pods are
connected to a vertical central column with long, comparatively lightweight
rods. The ride begins with a motor increasing the central column’s angular velocity until the pods are rotating at a distance R from the axis of rotation (see figure C6.12a). The shaft is then disconnected from the motor so it
turns freely. Suddenly, hydraulic cylinders pull on the rods to draw the pods
inward to a distance of _ 13 R from the central axis (see figure C6.12b). By what
factor does the ride’s angular speed │ω
W│ increase in this process?
Definition of the system
Solution The system here is the central column, the pods, and the apparatus
that connects them. When the motor disengages, we will assume that the system is functionally isolated for rotations around the z axis. (This assumes that
frictional torque is small enough that it supplies little angular momentum
during the time that the pods are pulled in.) The ride is symmetric in the sense
W to the system. In terms of the symbols defined in
that we need to apply L
W = I ω
W
the diagram, we want to find │ω
Wf│/│ω
i│. The problem statement implies that we
know R, but nothing else, so many things had better cancel!
The master equation for this case is Lzi = Lzf or, more particularly,
Master
equation
1
3
R
Symbol
definitions
Figure C6.12
Initial and final diagrams for an
amusement park ride.
More assumptions
and approximations
Conservation of Angular Momentum
ω
I
Iiωzi = If ωz f ⇒ ___zf= __
i
ωzi If
(C6.16)
where Ii and If are the system’s initial and final moments of inertia, and ωzi
and ωzf are the z components of the system’s initial and final angular velocities. Now, the system’s moment of inertia is Ii = ∑mkr 2ki , where the sum is
over all particles (the kth of which has mass mk and is initially a distance rki
from the axis). But the column’s particles are all very close to the axis, and so
should contribute very little to the sum (r 2ki will be very small compared to R)
so let’s ignore the column. Similarly, we will ignore the “comparatively lightweight rods” and the cylinder apparatus (otherwise, we don’t have enough
information to solve the problem). If we treat the pods as point particles, then
Ii ≈ NmR2, where N is the number of pods. Similarly, If ≈ Nm( _31R)2. Substituting this back into equation C6.16 yields
@
ω
I
N
m │
R2 = 9
___zf= __
i≈ ________
1
@m( _3 │
R)2
ωzi If N
Final check
Algebra with
symbols!
Algebra with
symbols!
(C6.17)
Since the rotation is purely around the z axis and both angular velocities
W
point in the +z direction, this is the same as the ratio │ω
Wf│/│ω
i│. The result is
unitless (as it should be) and seems plausible.
C6.7 Conservation of Angular Momentum
95
Exercise C6X.3
Use equation C6.6 to determine the factor by which the pods’ ordinary speed
│ v
W│ increases in Example C6.2 situation.
Now let’s consider a case where the system has interacting parts having
different angular momenta. The mathematics presented in this chapter only
allows us to handle situations involving symmetric parts that both initially
W
and finally rotate about the same axis (or where one initially has L
= 0).
Problem: You are on a salvage mission to bring in the derelict spaceship
Daedalus, which is a sphere about 100 m in diameter. This ship was recently
found after being lost during a battle 47 years ago, and impacts from the
battle have left it turning once every 5 s, too fast for safe boarding. Your
second officer recommends placing your ship (which has roughly the same
mass and size) at rest relative to the spinning wreck about 1.0 km away in
a direction perpendicular to its axis of rotation, and then grabbing it with a
tractor beam, which would have the same effect as suddenly connecting the
two ships with a massless rigid rod. Is this wise? What would happen?
Definition of the system
Isolation
External interactions
Solution The system is the two ships. The ships’ only external interactions
are gravitational with distant objects, so this system floats in space. Figure
C6.13 shows the initial and final situations. Since ordinary momentum must
be conserved, if the system’s center of mass was at rest before the ships interact in our freely floating frame, it must be so afterward. But if the ships are
locked together by the tractor beam (so that they always present the same face
to each other), then to conserve angular momentum, the two-ship system as a
whole must rotate around the system’s center of mass after the grab, turning
about the same axis that the Daedalus was tumbling about initially. Since the
ships are small (r = 50 m) compared to their separation (2R = 1000 m = 20r),
we can reasonably model them as particles at the ends of a massless rod. The
W
W
master equation L
i = L
f for this situation is therefore
Master equation:
0 + IDω
Wi = ISω
Wf
(C6.18)
Example C6.3
Symbol
definitions
Initial:
your ship,
mass m
Daedalus,
mass m,
radius r
2R
Final:
tractor
beam
R
(axes not
necessary
in this case)
ωf
r = 50 m
R = 500 m
ωi = 15 rev/s
ωf = ? m = ?
Figure C6.13
Initial and final diagrams for
the salvage mission and a list
of knowns and unknowns.
Assumptions and limitations
where ID is the Daedalus’s moment of inertia, while IS is the same for the entire
system. If we model the Daedalus as a solid sphere, then ID = _25 mr 2. If we
model the final system as two point particles, then IS = mR2 + mR2 = 2mR2.
If we take the magnitude of both sides of equation C6.18, solve for the
unknown │ω
Wf│, and substitute in the two equations for ID and IS, we get
2
_ 2 m
_ 1 rev
│ω
@r │ω
Wi│ _____
@/s
Wi│ _______
ID│ω
Wi│ _________
Wf│ = ______
= 5
2 =
= 5
│ω
@(10r)
IS
500
500
2 m
(
)
2π rad
2π ____
rad
______
= _____
1 rev
@
2500 s
(C6.19)
Algebra with symbols,
tracking units
This is one rotation every 2500 s. The final speed │v
Wf│ of each spacecraft in a
frame attached to the system’s center of mass will be about
2π = ___
Wf│ = R│ω
Wf│ = 500 m ______
2π __
m = 1.3 __
m
│v
2500 s
5 s
s
(C6.20)
So grabbing on to the Daedalus will cause your ship to suddenly accelerate
forward to about walking speed, like stepping on a moving walkway in an
airport. This will probably not be too bad for the ship or its occupants.
ωi
Tracking units
Final check (note that
the units work out)
Chapter C6
96
Conservation of Angular Momentum
TWO-MINUTE PROBLEMS
C6T.1 A cylinder rolls, without slipping, down an incline
directly toward you. The cylinder’s angular velocity ω
W
points in which direction?
A. Toward you
B. Away from you
C. To your right
D. To your left
E. Some other direction (specify)
C6T.2 A cylinder rolls, without slipping, down an incline
directly toward you. The contact interaction between the
cylinder and the incline exerts a frictional torque on the
cylinder. What is this torque’s direction?
A. Downward
B. Away from you
C. To your right
D. To your left
E. Some other direction (specify)
C6T.3 Consider a rectangular book. The book is (approximately) symmetric (in the sense defined in the chapter) for
rotations around an axis that is perpendicular to its face
and goes through its center of mass. T or F? The book is
(approximately) symmetric for rotations around an axis
that goes diagonally from one corner to the other. T or F?
W
C6T.4 The letter N is symmetric (in the sense defined in
this chapter) for rotations around an axis going through
its center that points in which of the following directions?
A.
W
B. C. Perpendicular to the plane of the letter
D. A and C
E. A, B, and C
C6T.5 A person is sitting at rest on a stool that is free to
rotate about a vertical axis. The person holds in one hand
a bicycle wheel that spins rapidly counterclockwise (when
viewed from above). The person then stops the wheel with
the other hand. What happens as a result?
A. The person rotates counterclockwise
(as seen from above).
B. The person rotates clockwise (as seen from above).
C. Nothing. The wheel’s angular momentum is carried
away by external interactions.
D. Nothing. The wheel’s angular momentum is simply
dissipated by the friction interaction.
E. Something else happens (specify).
C6T.6 A person is sitting at rest on a stool that is free to
rotate about a vertical axis. The person holds a bicycle
wheel that is rapidly spinning counterclockwise when
viewed from above. The person then flips the wheel over.
What happens as a result?
A. The person rotates counterclockwise
(as seen from above).
B. The person rotates clockwise (as seen from above).
C. Nothing. The wheel’s angular momentum is simply
dissipated in the person’s body.
D. Nothing, because the wheel’s angular momentum
remains the same before and after the flip.
E. Something else happens (specify).
C6T.7 Suppose you are looking down on a disk that is
spinning counterclockwise. If we apply an upward torque
to the disk, its angular speed
A. Increases.
B. Decreases.
C. Remains the same.
C6T.8 If global warming proceeds during the next century
as anticipated, the polar ice caps may melt, substantially
raising sea levels around the world (and flooding coastal
cities such as New York and New Orleans). What effect
will this have on the duration of the day?
A. It will lengthen the day slightly.
B. It will shorten it slightly.
C. It will have strictly no effect.
C6T.9 When I was a teenager, I saw a Candid Camera
­sequence in which they filmed a person struggling with
a suitcase that (unknown to that person) contained a large
and rapidly spinning gyroscope. Imagine you are carrying
such a suitcase where the gyroscope’s angular velocity is
oriented horizontally to your right as you carry it in your
right hand. Imagine you try to make a left turn, thus turning the suitcase to the left around a vertical axis. What does
the suitcase do?
A. It turns to the left as one would expect.
B. It tries to turn instead to the right.
C. It tries to rotate around a horizontal axis, with its right
face turning upward.
D. It tries to rotate around a horizontal axis, with its left
face turning upward.
E. It tries to rotate around a rightward axis, with its front
edge moving up.
C6T.10 (Challenging!) Experienced players can throw a
Frisbee so it skips off the ground (the Frisbee’s front edge
actually tips upward after the Frisbee hits, enabling it to
climb back into the air). If a right-handed player throws a
Frisbee in the usual way, it rotates counterclockwise when
viewed from above. To skip the Frisbee, which edge has
to hit the ground (as seen by the thrower)? (Hint: The
­Frisbee’s angular momentum vector, and thus its rotation
axis, changes in the direction of the external torque that the
strike applies to the Frisbee.)
A. The back edge
B. The front edge
C. The right edge
D. The left edge
E. The entire rim must hit the ground simultaneously.
Homework Problems
97
HOMEWORK PROBLEMS
Basic Skills
C6B.1 The earth spins once a day and has an equatorial
radius of 6380 km. What is the ordinary speed (in m/s) of
a point on the earth’s equator relative to the earth’s center?
C6B.2 Jupiter spins once every 9.92 h and has an equatorial
radius of 71,500 km. What is the ordinary speed (in m/s)
of a point on Jupiter’s equator due to Jupiter’s rotation?
C6B.3 A bowling ball with a mass of 5.0 kg and a radius of
12 cm rotates at 4 rev/s as it rolls down the bowling alley.
What is the magnitude and direction of the ball’s anguW
W
lar velocity ω
and its angular momentum L
? (Specify the
directions as they would be viewed by the bowler.)
C6B.4 A “Lazy Susan” on a dining table is a disk with a
mass of 5 kg and a radius of about 0.5 m. What is the magnitude and direction of its angular velocity ω
W and its angular
W
momentum L
if it rotates clockwise once every 4 s?
C6B.5 A typical bicycle wheel might have a mass of 1.7 kg,
a radius of about 62 cm, and an α ≈ 0.8 (since most of the
wheel’s mass is near the rim). Imagine we spin up such a
wheel to 1.5 rev/s and then let it come to rest, which we
observe to take about 3 minutes. What is the approximate
magnitude of the frictional torque on the wheel’s hub (if
we assume that torque is constant)?
C6B.6 An NCAA size 7 basketball has a circumference of
755 mm and a mass of about 600 g. If a basketball spinning
at about 4 rev/s counterclockwise around a vertical axis on
a person’s finger slows to 2 rev/s in 5 s, what is the magnitude (in SI units) and direction of the torque exerted by the
finger (if we assume the torque is constant)?
C6B.7 An object consists of four small spheres attached to
the ends of two thin rods that are connected perpendicularly at their centers, forming a cross. Assume each sphere
has a mass of m and a radius that is negligible compared to
the distance R that each is from the cross’s center (in other
words, we can model each as if it were a particle), and that
each rod has a mass of _ 12 m. What is α for this object (a) for
rotations around an axis perpendicular to the plane of the
cross and (b) for rotations around an axis that goes along
one of the rods? (Hint: The object’s total mass is not m.)
C6B.8 An object consists of a hollow sphere of mass m and
radius r pierced through its center by a thin rod of mass m
and total length 4r. The center of the rod coincides with the
center of the sphere. What is α for this object for rotations
about an axis perpendicular to the rod? (Hint: The object’s
total mass M and maximum distance R are not m and r.)
C6B.9 An object consists of four small balls with mass m,
connected by rods of negligible mass in a square with sides
L. What is α for rotations about an axis going through one
of the balls and its diagonal opposite? (Hints: Treat the
balls as point particles. What are M and R for this object?)
C6B.10 Why would it be bad in example C6.3 to position
yourself along the Daedalus’s axis of rotation before grabbing it? Also, why did the second officer recommend separating the ships by at least 1.0 km instead of, say, 0.5 km?
Modeling
C6M.1 What is α for a disk of mass M and radius R that has a
hole in the center of radius _ 12 R? [Hint: Consider the moment
of inertia of a complete disk of radius R, and then subtract
the moment of inertia of a disk with radius _ 12 R. What are
these two hypothetical disks’ masses in terms of M?]
C6M.2 Many subatomic particles (including the electron)
behave as if they were spinning around their axis. Empirically, the electron has a spin angular momentum h/4π,
where h is Planck’s constant. A simplistic model imagines
the electron to be a spinning uniform ball. Other measurements indicate that if the electron really is a ball, its radius
is less than 10–18 m. Show that if the simplistic model were
true, a point on the electron’s equator would be moving
much faster than light. (A more sophisticated quantummechanical model of electron spin avoids this paradox.)
C6M.3 As a massive star ages, “ashes” from its nuclear
reactions pile up in its core. The core still loses energy
through radiation, but since the ashes cannot release
any more nuclear energy, this energy must come from
the core’s gravitational potential energy. Therefore, the
core must shrink, even while still collecting ashes. When
the core’s mass reaches 1.4 solar masses, its protons and
electrons become so densely packed that they begin to
combine to form neutrons. Since the pressure exerted by
highly confined electrons contributes most of the core’s
resistance to compression, removing electrons causes
the core to shrink faster, which causes more electrons to
react with protons, which causes the core to shrink even
faster, and so on. Once the reaction begins, it actually only
takes about a second for the core to collapse to a radius of
about 12 km while converting all its electrons and protons
into neutrons. The core is now so small that its neutrons
actually touch, making it strongly resist further collapse.
As material outside the core crashes down onto the tiny
but suddenly solid core, a shock wave forms that blows
much of that material away in a huge explosion. This is a
supernova.
What remains is a ball of pure neutrons with a mass
of about 1.4 solar masses and a radius of 12 km. We call
such an object a neutron star. A neutron star usually has an
intense magnetic field that sweeps around with the star as
it rotates and which creates radio waves that pulse in step
with the star’s rotation. We call a neutron star that emits
detectable radio pulses in this manner a pulsar. W
98
Chapter C6
Conservation of Angular Momentum
C6M.3 (continued)
How fast should a newly formed pulsar rotate?
Assume that when the 1.4 solar-mass core was the size of
our sun (whose radius is 700,000 km), it rotated at about
the same rate as our sun does (about once per 2.6 Ms). Use
this to estimate the rotation rate of a newly formed pulsar
with a radius of 12 km. Note that newly formed pulsars
have been found with rotational periods below 1 ms.
Cloud
vi
Black
hole
C6M.6 A certain playground merry-go-round is essentially
an iron disk of radius R and mass m. Two children, whose
masses are each _25 m, are originally sitting on opposite sides
of the disk near its outer edge. The merry-go-round is
turning essentially without friction around a vertical axis
once every 5 s. The children then clamber toward each
other until each is only _ 13 R from the center. How long does
it take the merry-go-round to complete a revolution now?
(Hint: Model the children as particles.)
C6M.7 Astronomers currently believe that every galaxy has
a supermassive black hole at its center and that a typical
galaxy has collided with other galaxies several times since
the beginning of the universe. Imagine that the central
black holes of two colliding galaxies end up, after the collision, orbiting each other in the middle of a cloud of dust
and stars. Assume that the black holes have the same mass
M (which may be millions or even billions of times that of
the sun) and each is initially in a circular orbit of radius R
around the pair’s center of mass (which is halfway between
them), and the surrounding cloud has no net angular
momentum, as shown in figure C6.14. Over time, frictional
interactions with the cloud cause the black holes to slowly
spiral in toward each other. If their orbits remain approximately circular as they slowly spiral in, then the speed of
each in its circular orbit will be │v
W│ = _12 (GM/r)1/2, where
G is the universal gravitation constant and r is the distance
between each black hole and the pair’s center of mass.
(We will prove this result in unit N. For now, accept that
this is true.) Assume that after a billion years, the distance
between each black hole and the pair’s center of mass is
9
now __
R. If the cloud has not been involved with any sig25
nificant external interactions during this time, what is the
magnitude and direction of the cloud’s angular momentum at this point? Give the magnitude in terms of G, M,
and R, and the direction assuming that we view the cloud
from the direction implied by figure C6.14.
R
CM
Black
hole
vi
C6M.4 When our sun (whose current radius is about
700,000 km and which rotates once in roughly 2.6 Ms) runs
out of fuel, it will eventually become a white dwarf star
with about the same radius as the earth (6380 km). Estimate the sun’s rotational period when it is that size.
C6M.5 Two astronauts of equal mass are floating in space.
They both hold onto a light rod 20 m long, and the whole
system is rotating about the rod’s center once every 30 s.
(a) What is the ordinary speed of each astronaut?
(b) Now imagine that the astronauts pull themselves
along the rod until they are 10 m apart. What are their
ordinary speeds now?
R
Figure C6.14
A pair of equal-mass black holes orbiting their common
center of mass in a cloud of dust and stars.
C6M.8 A certain communications satellite has a mass M
and is shaped essentially like a hoop with radius R. Virtually all of the satellite’s mass is within a few centimeters of
this radius, except for a stabilizing gyroscope at the hoop’s
center. This gyroscope is essentially a disk with a mass
1
1
m = __
M and radius r = __
R and is enclosed in a spheri50
20
cal container that has the same mass m and a radius that
is a bit bigger. The gyroscope initially rotates around an
axis parallel to the hoop’s symmetry axis (which we can
choose to call the z axis) at an angular speed of 30 turns per
second. But suddenly, one of the magnetic bearings fails,
and the gyroscope tumbles loose in its housing until friction brings it to rest relative to the housing. If the satellite
as a whole was not rotating prior to this mishap, what is
its final rotation rate after the mishap? [Hint: The moment
of inertia of the gyroscope and its housing is insignificant
compared to that of the rest of the satellite. Why?]
C6M.9 A star with mass M and radius R collides with another
star of mass _ 34 M and radius _ 45 R, and coalesce to form a new
star at rest whose radius is _ 65 R. Assume that initially the
colliding stars had angular velocities with opposite directions but the same magnitude │ω
W│. What is the magnitude
and direction of the final star’s angular velocity? (Express
the magnitude as a fraction of │ω
W│).
Rich-Context
C6R.1 When jumping from a platform, a high diver initially
holds his or her body essentially extended and straight
and rotates slowly while falling. The diver then tucks into
a compact shape and tumbles rapidly. As the diver nears
the water, he or she straightens out again and again rotates
only slowly while entering the water. Roughly how much
faster would the diver tumble when compacted in a ball
than when extended and straight? (Hints: A freely falling
diver can be modeled as “floating in space.” Think of simple shapes you might use as models for the diver’s body
in both configurations, and make some measurements on
your own body to determine radii or lengths. It may help
Answers to Exercises
99
you to know that the moment of inertia for a thin rod rotating about its center is I = __
121 ML2, where M is the rod’s mass
and L is its end-to-end length.)
C6R.2 A person holds a 5-kg weight in each hand with
arms outstretched while standing at rest on a lightweight
platform that is free to turn around a vertical axis. Other
people then set the person turning at a rate of one turn
per 7.2 s. The person then lowers the weights until they
are alongside the person’s legs. At this point, the person
is spinning at one turn per 1.2 s. Estimate the person’s
moment of inertia (including the person’s arms in the final
position). (Hint: Treat the person’s outstretched arms as a
long rod in the first case. A person’s arm represents about
5% of that person’s total mass.)
C6R.3 Many atomic nuclei can be modeled as solid uniform
spinning spheres that all have roughly the same density.
Imagine that in a particle physics experiment, a nucleus with
mass m1 and an angular velocity ω
W directed along its direction of motion collides with a nucleus with mass m2 = __
278 m1
32
│
W2│ = __
with an angular velocity of magnitude │ ω
243
ω
W│ in the
opposite direction. The nuclei coalesce into a new spherical nucleus with the same density. What is the magnitude
and direction of the new nucleus’s angular velocity (in
W
terms of the magnitude and direction of ω
)?
ANSWERS TO EXERCISES
C6X.1
C6X.3
As there are 2π radians in a revolution,
(
)
0.3 ___
rev
______
2π rad = 1.88 ____
rad
s
s
1
rev
(C6.21)
C6X.2 The moment of inertia of the two hemispheres is the
same as that of a single sphere of mass 2m. The object’s total
moment of inertia will be the sum of this sphere’s moment
of inertia plus the disk’s moment of inertia. Since a disk
has α = _12and a sphere has α = _25 , the object’s total moment
7
of inertia is I = _12 mR2 + _25 2m( _12 R)2 = ( _12 + _15 )mR2 = __
mR2.
10
The object’s total mass M is 3m, though, so α here is
2
α = ____
I 2 = ___
7 ______
mR 2 = ___
7
MR
10 (3m)R
30
(C6.22)
Note that equation C6.6 implies that
Wf│ rf│ω
Wf│
│v
____ = ______ │v
Wi│ ri│ω
Wi │
(C6.23)
where │v
Wi│ and │v
Wf│ are the pods’ initial and final speeds,
respectively, and ri and rf are their initial and final radii. But
ri = R, rf = _ 13 R, and we know that │ω
Wf│/│ω
Wi│ = 9. Therefore,
_ R
│v
W f│ ___
= 3 9 = 3
____
R
│v
Wi│
1
(C6.24)
So the speed goes up by a factor of 3, not 9. But this will
still be a rush for the pod riders.
C7
More About Angular
Momentum
Chapter Overview
Section C7.1: First Steps
This section argues that a single particle’s angular momentum L
W about a point O is plauW and its
sibly perpendicular to the plane containing the particle’s ordinary momentum p
position rW relative to O, and also that │L
W│ = │ rW│
│p
W││sin θ│, where θ is the angle between
W .
rWand p
Section C7.2: The Cross Product
W
W in this particular case also
The abstract relationship between the vectors L
, rW , and p
describes the relationship between other vector triplets in physics, making it worth
defining the vector cross product to describe this relationship:
│u
W × W
n│ = │u
W││n
W││sin θ│
W
W
direction of u
× n
:
u× n
u× n
u
u
n
θ
(a)
n
u
(C7.6b)
W
W
• Purpose: This equation defines the cross product u
W × n
of two vectors u
and
W
W
W, where θ is the smallest angle between the directions of u
n
and n
.
• Limitations: None. This is a definition.
• Note: The cross product yields a vector with units that are the product of the
W
units of u
W and n
(which need not have the same units).
The cross product has the following important properties:
u× n
u
n
(b)
Figure C7.3
This figure illustrates two different ways of defining the direction
of the cross product: (a) pointing
your first and second right fingers
W
W
in the direction of u
and n
,
respectively or (b) pointing all
your right fingers in the direction
W
of u
and then bending them in the
W
direction of n
. In either case, your
thumb indicates the direction of
W
W
the cross-product vector u
× n
.
100
⊥ to both u
W and W
was specified by
the right-hand rule in figure C7.3.
(C7.6a)
W × (n
W + sW) = u
u
W × n
W + u
W × sW
[the cross product is distributive]
(C7.7b)
W
W × 0W = 0
u
(C7.7c)
W × (an
W) = (au
W) × n
W × n
u
W = a(u
W)
[the cross product is linear]
(C7.7d)
W × u
W × n
n
W = −u
W
[the cross product is anti-commutative]
(C7.7e)
W × u
u
W = 0 always
(C7.7f )
The value of │u
W × n
W│ is the area (base times height) of the parallelogram whose sides
W
W
are u
and n
. The components of the cross-product vector are
W = u
If q
W × n
W,
qx
uynz − uzny
uznx − uxnz
then qy =
[ qz ] [ uxny − uynx ]
(C7.9)
Note how the subscripts cycle in alphabetical order in the positive terms.
Section C7.3: The Angular Momentum of a Moving Particle
Using the cross product, we can define a particle’s angular momentum to be
W = rW × p
W
L
(C7.10)
• Purpose: This equation specifies a particle’s instantaneous angular momentum
around a designated origin point O, where rW is the particle’s position relative to
W is the particle’s (ordinary) momentum at the instant in question.
O and p
W ⊥ is the portion of p
W per W│=│rW│
│p
W⊥│=│rW⊥ ││p
W│=│rW│
│p
W││sin θ│, where p
• Notes: │L
pendicular to rW, rW ⊥ is the portion of rW perpendicular to pW , and θ is the angle between
W . │L
W . The direction
rW and p
W│ is the area of the parallelogram spanned by rWand p
W
W as indicated by your right thumb when
of L
is perpendicular to both rW and p
W , respectively (see
your index and second fingers point in the direction of rW and p
W × rW .
figure C7.6). Note that the order is important: L
W ≠ p
• Limitations: This simple formula exactly applies only to particles.
W
W
L
= constant for a particle moving in a straight line, with │L
│ = rmin│p
W│, where rmin is
the distance between the origin O and the closest point on the particle’s trajectory.
L
r
p
L
θ
p
Section C7.4: Rotating Objects
Particle
L
r
O
This section proves that summing L
Wi = rWi × p
Wi over all particles in a rigid symmetric
object rotating about its center of mass implies that the object’s total angular momenW
tum L
= I ω
W, as claimed in the last chapter.
Figure C7.6
Section C7.5: Rotating and Moving Objects
How to calculate the angular
momentum of a moving particle.
W = L
W
W
L
rot + L
CM
(C7.16)
• Purpose: This (nonobvious!) equation says that an object’s total angular
W
momentum L
about some origin point O is the vector sum of the object’s rotaW
tional angular momentum L
rot about its center of mass (computed as if it were not
W
WCM of the object’s center of
moving) and the angular momentum L
CM = rWC M × Mv
mass about O (computed as if it were a particle), where M is the object’s mass, rW C M
W CM is its velocity.
is the position of the object’s center of mass relative to O, and v
• Limitations: The speed of any constituent particle in the object must be much
smaller than the speed of light.
Section C7.6: Torque and Force
This section argues that the torque that an interaction exerts on a particle is given by
W = rW × F
τ
W, where F
W is the force that the interaction exerts on the particle and rW is the
particle’s position relative to the origin. This in turn means that
W]
[dL
W
W ≡ ____
τ
= rW × F
dt
(C7.21)
W]/dt at which twirl
W
• Purpose: This equation describes the torque τ
(the rate [dL
is delivered) exerted on an extended object about some origin point O by an
W
interaction that exerts a force F
at a point whose position is rW relative to O.
• Limitations: This equation is only valid to the extent that the position rW where
the force is applied is well defined. Also, object particles directly affected by the
force must have speeds much smaller than that of light.
Section C7.7: Why Angular Momentum Is Conserved
This section explains how conservation of angular momentum follows from the symmetry principle that the laws of physics are the same for all orientations in space.
101
Chapter C7
102
C7.1
Steps toward finding the angular momentum of one particle
ω
m
r
r
O
m
axis
Figure C7.1
A pair of opposed identical
­particles revolving around a
­common rotation axis.
v
θ
vr
r
ϕ
ds = r dϕ = v dt
dϕ
r
ϕ
(b) O
First Steps
Chapter C6 provided an overview of conservation of angular momentum as
it applies to rotating rigid symmetric but otherwise stationary objects. In order
to be able to handle more general cases, we have to go back to the beginning
and define the angular momentum of a single moving particle. We can then
talk about a more general system’s total angular momentum by summing the
angular momenta of its constituent particles.
But what is the angular momentum of a single particle? To start, consider
a symmetric “dumbbell” consisting of a pair of opposed particles of mass m
that are rotating in circular trajectories with the same fixed radius r around a
common central point O (see figure C7.1). In section C6.4, I claimed that we
experimentally find that the pair’s angular momentum is
Wpair = 2mr2 ω
L
W
v
(a) O
More About Angular Momentum
(ω points toward us)
Figure C7.2
(a) A particle at position r
W relative to O moving with an arbitrary
W
velocity v
. (b) Only the velocity
W
component vector v
⊥ affects the
particle’s angular position in the
W and v
W
plane containing r
.
(C7.1)
W
where ω
is the pair’s angular velocity, which points along the pair’s rotation
axis on the side indicated by our right thumb when we curve our fingers in
the direction of the particles’ rotation.
We might be tempted, therefore, to define the angular momentum of
W. But our situeach individual particle in this dumbbell to be simply L
W = mr2 ω
ation (a matched pair moving in a circle) is too specialized to warrant jumping to this conclusion. We need a more general definition that (1) allows us
to calculate a particle’s angular momentum L
W at an instant, (2) allows us to
handle more general cases where the particle might be moving toward or
away from the origin as well as circularly around it, and (3) reduces to equation C7.1 in the special case shown in figure C7.1.
At a given instant of time, the only things we really know about a parW at
ticle are its position rW relative to some origin O, its instantaneous velocity v
that position, and its mass m, so we would expect its angular momentum to
depend only on these quantities. Figure C7.2 shows a particle at a position rW
moving with an arbitrary velocity v
W as viewed by an observer looking down
W
W (which is the same as the plane of
on the plane that contains both r and v
the figure). Let ϕ be the angle that the particle’s position vector makes with
an arbitrary reference direction. We can write the particle’s velocity at the
instant shown as the sum of two what we might call “component vectors”:
W = v
W r + v W ⊥, where v
W r is parallel to the radial line connecting the particle with
v
W
the origin O and v ⊥is perpendicular to that radial line (but in the same plane
as rW and v
W). Note that only v W ⊥ causes the particle’s angular coordinate ϕ to
change (see figure C7.2b). During an infinitesimal time interval dt, the particle’s angular position changes such that r dϕ = ds, where ds = │v W ⊥│
dt is the
physical distance the particle moves in a direction perpendicular to the radial
direction. Therefore, we have
| dt | r | dt |
│v
dϕ
W ⊥│
ds =
│ω
W│≡ ___ = __
1 __
_____
r
(C7.2)
W
where r ≡│ rW│. Therefore, a revision of the expression L
= mr2 ω
W that could
work for a particle moving in an arbitrary direction might have a magnitude
W
│L
│= m│rW││v
W⊥│=│rW││p
W⊥│=│rW││p
W││sin θ│
(C7.3)
where p W ⊥ = m
v W ⊥is the particle’s ordinary momentum vector component in
W = mvW, and
the direction perpendicular to rW but in the same plane as rW and p
θ is the angle between rWand p
W (see figure C7.2b). The direction of L
W is plausiW
bly the same as the direction of ω
, which is the direction of the axis through
O about which the particle seems to be rotating at the instant in question.
C7.2 The Cross Product
103
This direction will be perpendicular to the plane that contains both rWand p
W on
the side indicated by your right thumb when your right fingers curve in the
direction in which the particle is currently moving. Such a definition would
certainly yield the observed result (equation C7.1) in the situation illustrated
W r = 0), because the magnitude of each
in figure C7.1 (where each particle has v
particle’s angular momentum according to this definition would be
│L
W│=│rW││pW ⊥│ = rm│v
W ⊥│= rm│ω
W│r = mr2│ω
W│
(C7.4)
W
W
and the direction of L
in each case would be the same as the direction of ω
W
W.
shown in that diagram, so we indeed have L
pair = 2mr2 ω
So, to summarize, a plausible expression for an arbitrarily moving parW
ticle’s angular momentum L
around some origin point O is
│L
W│≡│rW││pW ⊥│ =│rW││pW ││sin θ│
(C7.5a)
W
W as specified by the RH rule for ω
direction: ⊥ to both rW and p
(C7.5b)
A plausible guess for the angular momentum of one particle
where p
W is the particle’s momentum, rWis the particle’s position vector relative
W .
to O, and θ is the angle between the directions of rW and p
C7.2
The Cross Product
The type of vector relationship between the vectors L
W, rW, and p
W that equation
C7.5 describes is sufficiently common in physics and mathematics to make it
worth defining a compact notation to describe it. We define the cross product
W × n
W
W
W
u
of two arbitrary vectors u
and n
to be a new vector such that
│u
W
W × n
│ = │u
W││n
W││sin θ│
W
direction of u
W × n
:
W
W
⊥ to both u
and n
as specified by
the right-hand rule in figure C7.3.
(C7.6a)
(C7.6b)
W
W
• Purpose: This equation defines the cross product u
× n
of two vectors
W
W
W
W
u
and n
, where θ is the least angle between the directions of u
and n
.
• Limitations: None. This is a definition.
• Note: The cross product yields a vector with units that are the product
W
of the units of u
W and n
(which need not have the same units).
Definition of the cross product
u×n
u×n
u
u
n
θ
(a)
n
u
u×n
u
n
(b)
Figure C7.3
In chapter C3, I noted that we had not (at that point) defined how to multiply
two vectors. This is one of two different ways of multiplying vectors that we
will discuss in this unit (we will see the other in chapter C10).
We can describe the right-hand rule for the cross product in two different
ways. Figure C7.3a illustrates the first: if you point your right index finger in
the direction of u
W and your second finger in the direction of n
W, then your right
W
W
thumb indicates the direction of u
× n
. Figure C7.3b illustrates an alternative
W
(but equivalent) procedure: if you point all your fingers in the direction of u
and bend them (at their bases) to point in the direction of n
W, then your thumb
W
W
will again indicate the direction of u
× n
. I marginally prefer the first (perhaps because it is easier to draw), but the second does more vividly illustrate
the connection between the cross-product rule and the rule that defines the
W
angular velocity ω ’s direction: in figure C7.2b, pointing your right fingers
along rWand bending them in the direction of v
W (or p
W), yields the same result as
curling those fingers in the direction of rotation.
This figure illustrates two different ways of defining the direction
of the cross product: (a) pointing
your first and second right fingers
W
W
in the direction of u
and n
,
respectively or (b) pointing all
your right fingers in the direction
W
of u
and then bending them in the
W
direction of n
. In either case, your
thumb indicates the direction of
W
the cross-product vector u
× n
W.
104
Chapter C7
More About Angular Momentum
Figure C7.4
The magnitude of the cross
product is equal to the area (that
is, the base times the height) of
the parallelogram spanned by
its vectors, which is equal to the
magnitude of either vector times
the magnitude of the perpendicular portion of the other vector.
Properties of the cross product
u n
n
n
(a)
θ
u n
n
u
n = u
u n sin θ
n||
u
(b)
n =
u
u||
θ
u
The cross product’s definition means that it behaves like the product of
two numbers in a number of ways: if a, b, and c are ordinary numbers, then
W × n
u
W is a vector [just as ab is a number]
(C7.7a)
W × (n
W + sW) = u
u
W × n
W + u
W × sW [just as a(b+c) = ab + ac]
(C7.7b)
W × 0W = 0 [just
u
W
as a·0 = 0]
(C7.7c)
W is a vector whose three components are zero. The cross product is
where 0
also sensibly linear with regard to the multiplication of a vector by a number:
W × (an
W) = (au
W) × n
W × n
u
W = a(u
W)
[just as a(bc) = (ab)c = b(ac)]
(C7.7d)
However, there are several ways in which the cross product does not behave
similarly to the product of two numbers:
The cross product’s magnitude
is the area of the parallelogram
formed by its vectors
W × u
W × n
n
W = −u
W [even though ba = +ab]
(C7.7e)
W × u
u
W = 0 always [even though a·a ≥ 0]
(C7.7f)
You can easily see that the right-hand rule requires equation C7.7e: if you
W
W
point your first and second fingers in the direction of u
and n
, respectively,
and then n
W and u
W, respectively, you will see that your thumb must point
in opposite directions. (Try it!) We therefore say that the cross product is
­anti-commutative (unlike the product of two numbers, which is commutative).
The other equations C7.7 also follow easily from the cross product’s defiW
W + sW) =
nition (see problem C7D.1) except for the distributive property u
× ( n
W × n
u
W + u
W × sW, which (though it still follows solely from the cross product’s
definition) requires somewhat more effort to prove (see problem C7D.2).
W
As figure C7.4 illustrates, we can consider u
to be the sum of two vectors
W|| and u
u
W ⊥that are parallel and perpendicular to n
W, respectively. Alternatively,
W
W
W
we could consider n
to be the sum of vectors n
|| and n
⊥that are parallel and
W
W
W
perpendicular to u
, respectively. Note that the magnitude of u
× n
is equal
to the magnitude of either vector times the magnitude of the perpendicular
portion of the other vector:
│u
W × n
W│ ≡ │u
W││n
W││sin θ│ = │u
W⊥││n
W│ = │u
W││n
W⊥│
The components of the cross
product
(C7.8)
and that the result (in either case) is the area of the parallelogram (its base times
its height) whose sides correspond to the vectors u
W and n
W. This provides an
intuitive way to visualize what the cross product’s magnitude means.
If we write u
W = ux e Wx + uy e Wy + uz e Wz and n
W = nx e Wx + ny e Wy + nz e Wz (where e Wx, e Wy,
and e Wz are unit-magnitude vectors in the x, y, and z directions, respectively),
and use equations C7.7b and C7.7d, one can prove that
W = u
If
q
W × n
W,
qx
uynz − uzny
uznx − uxnz
then q y =
[ qz ] [ uxny − uynx ]
(C7.9)
C7.3 The Angular Momentum of a Moving Particle
105
(see problem C7D.3). This formula looks complicated at first, but you can
easily remember it by using the following trick. Consider the wheel shown in
figure C7.5, which shows the letters x, y, and z arranged clockwise in alphaW × n
W
betical order. Then note, for example, that [u
]x = qx = uy nz − uz ny. The
three indices in qx = uy nz − … go clockwise around the wheel, but the three
indices in qx = … − uz ny go counterclockwise around the circle. Convince yourself that the same pattern applies for the other components: you should find
that the three indices always go clockwise for the positive terms on the right
side of equation C7.9 and counterclockwise for the negative terms. So, to
reconstruct equation C7.9, simply remember the wheel!
–
+
x
y
z
Figure C7.5
A memory aid for equation C7.9.
Exercise C7X.1
W be a displacement vector in the +x direction with magnitude │u
Let u
W│ = 2 m.
│
│
Let n
W be a displacement vector with magnitude n
W = 4 m in the xy plane
but pointing in a direction 30° away from the x axis. (a) Use equations C7.6
W
W
W
to find the magnitude and direction of u
× n
. (b) Find the components of n
.
W
W
(c) Use equation C7.9 to calculate the components of u
× n
and show that its
magnitude and direction agree with the result of part (a).
C7.3
The Angular Momentum of a Moving Particle
With the definition of the cross product in mind, we can express the angular
momentum of a moving particle as follows:
L
r
W = rW × p
W
L
(C7.10)
• Purpose: This equation specifies a particle’s instantaneous angular
momentum around a designated origin point O, where rW is the partiW is the particle’s (ordinary) momentum
cle’s position relative to O, and p
at the instant in question.
• Notes: │L
W│=│rW │
│p
W⊥│=│rW ⊥ ││p
W│=│rW │
│p
W│sin θ , where p W ⊥is the portion of
W
W
W
W , and θ is
p perpendicular to r , r ⊥is the portion of rW perpendicular to p
W
W
W
│
│
the angle between r and p
. One can visualize L
as the area of the
W
W . The direction of L
­parallelogram spanned by Wr and p
is ­perpendicular
W
W
to both r and p
as indicated by your right thumb when your index
W , respectively (see
and second fingers point in the direction of rW and p
W × rW .
­figure C7.6). Note that the order in the product is important: L
W ≠ p
• Limitations: This simple formula applies exactly only to particles.
This equation coincides with our guess at the end of section C7.1. Our task
in this section will be to show that this definition makes physical sense
in the case of an isolated moving particle. In the next section, we will see
W
W in the case of a r­ otating symthat this expression also implies that L
= I ω
metric object.
A particle need not be moving in a circle or even in a curved path to
have angular momentum. As we will shortly see, an isolated particle (which
moves in a straight line at a constant velocity) has a nonzero angular momentum about any origin point O that does not lie along its trajectory. Moreover,
this angular momentum is conserved, as it must be for an isolated system.
p
L
θ
p
particle
L
r
O
Figure C7.6
How to calculate the angular
­momentum of a moving particle.
Chapter C7
106
More About Angular Momentum
θ
Figure C7.7
particle
ω
2
p2
L1
β
r
p1
r
r1
r2
α ϕ
1
L2
O
r
θ
O
r||
How does this work? Consider figure C7.7, which shows an isolated particle moving with a constant velocity along a straight line, and an arbitrary origin point O some distance away from that straight line. Equation C7.10 implies
that at every instant, │L
W│ = │ rW⊥││p
W│= b│p
W│, where b ≡ │ rW⊥│= │ rW│
│sin θ│ is the
distance between O and the closest point on the particle’s trajectory. Since b is
W is constant, │L
fixed and since the isolated particle’s momentum p
W│ is constant.
Moreover, since L
W is perpendicular to both rWand p
W, it must always point perpendicular to the plane of the drawing. As both the magnitude and direction
W
of L
is constant, we can indeed say that an isolated particle’s angular momenW
tum L
about any arbitrary point O is conserved.
C7.4
Is this definition of angular
momentum consistent with the
results in the last chapter?
r
b
A particle moving at a constant
velocity in a straight line that
passes a distance b from point O
has a constant angular momentum (whose magnitude is
│L
W│ = b│p
W│) about that point.
The nonzero angular momentum of a particle moving with
a constant velocity is constant
p
Rotating Objects
Consider now a rigid object whose center of mass is at rest and which is
rotating around a certain fixed axis with angular velocity ω
W. We’d like to
calculate such an object’s total angular momentum about its center of mass
W
W
and verify that our definition of angular momentum yields the result L
= I ω
discussed in the previous chapter.
Figure C7.8 shows such a rotating object. Consider two “bits” of the object
that have equal masses m, are equal distances r from the axis of rotation, and
are opposite to each other across that axis. These bits are labeled 1 and 2 on
W 2 lie in a plane perpendicular to the axis
the diagram. Their momenta p
W1 and p
of rotation and point basically away from us and toward us, respectively.
Suppose that the object’s center of mass is point O. The bits’ position vectors
rW1 and rW 2 both make the same angle of ϕ with respect to the rotation axis.
Note that since L
W1 = rW1 × p
W1 must be perpendicular to both rW1 and p
W1, it
W
does not point along the object’s angular velocity ω
but rather at an angle
α = 90° - ϕ from the axis to the left, as shown. Indeed, as the object rotates,
W
W 1!
L
1 also rotates around the axis to remain perpendicular to both rW 1 and p
However, the angular momentum L
W2 of the opposite bit 2 points at the
same angle α to the right, meaning that these two bits’ total angular momentum L
W1 + L
W2 points directly upward, and so is parallel to ω
W always (the horizontal components of these vectors cancel). The magnitude of the sum will
W
therefore be twice the magnitude of the vertical component of L
1:
│L
W1 + L
W2│ = 2│L
W1││sin β│ = 2(│ rW1││p
W1│)│sin β│
(C7.11)
W 1 are perpendicular, so │L
(rW1 and p
W1│ = │ rW1││p
W1│sin 90° = │ rW1││p
W1│). Now, note
that α + β = 90° and also α + ϕ = 90°, so β = ϕ. We can also see from the
diagram that │sin ϕ│ = r/│rW1│. Substituting these results into the above yields
Figure C7.8
A pair of symmetrically opposed
bits in a rotating object.
r = 2r│p
│L
W1 + L
W2│= 2│ rW1││p
W1││sin ϕ│= 2│ rW1││p
W1│ ____
W1│
│ r
W1│
irrespective of the location of the origin point O along the axis!
(C7.12)
C7.5 Rotating and Moving Objects
107
Finally, note that (assuming that each bit’s rotation speed is non­relativistic)
p
W1 = m│v
W1│. Moreover, since the bit will move an arclength of ds = r│dθ│ as the
object rotates through a differential angle dθ around the axis,
| dt |
ds = r ___
│v
W1│= r __
dθ = r│ω
W│
dt
(C7.13)
W
We therefore see that │L
W1 + L
2│ = 2r(mr2│ω
W│). As we have already established
W
W
that L
1 + L
W2 is parallel to ω
, we see that for our opposed pair of bits,
W1 + L
W
L
W2 = 2mr2 ω
(C7.14)
If every bit in the object has such a symmetrically opposite bit, then the
W
object’s total angular momentum L
will be the sum of the angular momenta
of such pairs, and will therefore be
W = (∑mi r 2i )ω
W
L
= I ω
W
all i
(C7.15)
as claimed in the previous chapter. So we see that this chapter’s definition
of a particle’s angular momentum is completely consistent with the results
of the last chapter. Note that this equation is true no matter where the origin
point O is, as long as it is somewhere along the object’s axis.
We can also now more clearly see what happens if the rotating object is
not symmetric. If some bits of the rotating object do not have a corresponding
bit across the axis of rotation, then those bits’ horizontal angular momentum components will not be canceled, leaving the total angular momentum
W with a nonzero horizontal component and so making it not parallel to ω
W
L
.
W
For an isolated object, L
must be conserved in both magnitude and direction,
so the object’s rotation axis ω
W will itself wobble around the fixed direction
W
of L
as time passes. This can lead to some complicated and interesting tumbling behaviors. If we force such an object to rotate around a fixed axis, then
the axle must exert torques on the object to make its angular momentum
move around the fixed direction of ω
W. This can be hard on the axle bearings
and lead to noisy and potentially destructive vibrations. Engineers therefore
work hard to ensure that a device’s rotating parts are symmetric.
C7.5
What happens when a rotating
object is not symmetric
Rotating and Moving Objects
What if a (symmetric) object is rotating around an axis through its center of
mass and is also moving as a whole about some origin O? The object’s total
angular momentum about O turns out to be simple:
W = L
W
W
L
rot + L
CM
(C7.16)
• Purpose: This equation says that an object’s total angular momentum
W around some origin point O is the vector sum of the object’s rotaL
W
tional angular momentum L
rot about its center of mass (computed as if
W
WCM of the
it were not moving) and the angular momentum L
CM = rWC M × M v
object’s center of mass about O (computed as if the object were a particle),
where M is the object’s mass, rWC M is the position of the object’s center of
mass relative to O, and v
WCM is the velocity of that center of mass.
• Limitations: The speed of any constituent particle in the object must
be much smaller than the speed of light.
The total angular momentum
of an object that is both rotating and moving
108
Chapter C7
More About Angular Momentum
This result is simple but not at all obvious. Each individual “bit” of the rotating and moving object follows a very complicated helical trajectory through
space, so one might reasonably suppose we should not be able to separate a
bit’s motion around the object’s center of mass from the motion of the center
of mass in this nice way. But the definition of the center of mass and the distributive and linear properties of the cross product ensure that we can in fact
make this separation (see problem C7D.4 for the details).
Exercise C7X.2
A Frisbee with mass M = 165 g and radius R = 13 cm is flying at 12 m/s past
you on a straight line whose closest point is 1 m to your left. The Frisbee is
rotating clockwise when viewed from above at 8 turns per second. What is
the Frisbee’s total angular momentum about you? (Hints: The moment of
inertia of a Frisbee is very nearly _ 34 MR2. Note that │ω
W│≠ 8/s.)
C7.6
The torque exerted by an interaction on a single particle
Torque and Force
Let’s turn our attention back to the angular momentum of a single particle. SupW
pose an interaction exerts a force F
on a particle. We can use the cross-product
W
definition of L
to find a simple expression for the torque that the interaction
exerts on that particle.
Suppose that during a very short interval of time dt, a particle’s momentum changes by dpW due to all the forces that act on it. During the same interval, the particle’s position rWrelative to point O changes by d rW. This means the
W
particle’s angular momentum L
changes by
W = L
W + dp
dL
W(t + dt) − L
W(t) = (rW+ d rW) × (p
W) − rW× p
W
= rW@
× pW + rW× dp
W + d rW× p
W + d rW× dp
W − rW@
× pW
= rW× dp
W + d rW× p
W + d rW× dp
W
(C7.17)
during the interval, where I have used the distributive property of the cross
product. Now, note that p
W = mvW, and (as long as dt is sufficiently small)
W dt, so d rW× p
W = m dt(v
W × v
W ) = 0, as the cross product of any vector with
drW= v
itself is zero. Note also that if dt is very small, then d rW is very small, so the
drW× dpW term will be much smaller than the rW× dp
W term. Therefore, the expression for dL
W above reduces to simply
W ≈ rW× dp
dL
W
(C7.18)
In the limit that dt goes to zero, this expression becomes exact. Now, suppose
that in the interval dt, interactions A, B, … deliver impulses [dp
W]A, [dp
W]B, … to
the particle. We therefore have
W = rW× ([dp
dL
W]A + [dp
W]B + ⋯) = (rW× [dp
W]A) + (rW× [dp
W]B) + ⋯
(C7.19)
W]A = rW × [dp
Therefore, the twirl delivered by interaction A must be [dL
W]A, that
W ]B, and so on. By definition,
delivered by interaction B must be [dL
W]B = rW × [dp
the torque an interaction exerts on a particle is the rate at which that interaction delivers twirl, so we must have
[dp
W]A
[dL
W]A
W
WA ≡ _____
τ
= rW× _____
≡ rW× F
A
dt
dt
and likewise for interaction B and so on.
(C7.20)
C7.6 Torque and Force
109
This formula has implications for extended objects as well as particles.
Consider a door that is initially at rest but also is free to rotate around the axis
that its hinges define. Suppose you push on the door with your hand, exerting a
W
force F
at a fairly localized position rW relative to a point O on the door’s axis
(see figure C7.9). This force contributes twirl to the particles in the door under
W
your hand at the rate τ
= rW × F
W. In a rigid door, internal interactions spread
this twirl out to all the door’s particles, causing the whole door’s rotation
rate to change. However, since internal interactions cannot change the door’s
total angular momentum, any change in the door’s angular m
­ omentum must
be due to the twirl delivered by the force F
W. So your hand delivers twirl to
W
W
the entire door at the rate τ
= rW× F
.
Is this picture consistent with your experience of opening doors? You
know from experience that you can most effectively change a door’s rotation rate by pushing perpendicular to the door’s plane and as far as possible
from the axis defined by its hinges. This is completely consistent with the
formula τ
W = rW× F
W, because it implies that the magnitude of the rate at which
W ││sin θ│, which
W
W│ = │ rW× F
an interaction transfers twirl to a door is │τ
│ = │ rW││F
W
is clearly maximum for a given force F
if │ rW│
is as large as possible and the
W
angle between F
and rW (which lies on the door’s plane) is as close to 90° as
possible. Therefore, this equation does seem plausible.
This argument applies to other kinds of extended objects as well:
W]
[dL
W
W ≡ ____
τ
= rW × F
dt
(C7.21)
Implications for extended
objects
F
r
Hinge
Door
Hand
Figure C7.9
Pushing on a door.
The torque exerted on an
object by an interaction that
exerts a force at a specific point
W]/dt
W
• Purpose: This equation describes the torque τ
(that is, the rate [dL
at which twirl is delivered) exerted on an extended object about some
origin point O by an interaction that exerts a force F
W at a point whose
position is rW relative to O.
• Limitations: This equation is only valid to the extent that the position rW
where the force is applied is well defined. Also, object particles directly
affected by the force must have speeds much smaller than that of light.
This equation has the same form, but not quite the same meaning as equation
C7.20, which is the torque exerted on a point particle by a force acting on that
particle. Equation C7.21 describes the torque exerted on an extended object.
Note that equation C7.21 follows from equation C7.20. However, equation
C7.20 is more fundamental even though its focus is more limited.
Problem: A Frisbee (momentarily floating at rest) with mass M, radius R,
W
and moment of inertia I = _ 34 MR2 is spinning with an upward angular velocity ω
.
W
What is the magnitude of the total frictional force F
you must exert on its rim
as you catch it to stop its rotation within time T?
Solution Your hand will exert forces on various points on the Frisbee’s
rim. Let the portion of the frictional force that your fingers exert on the ith
point on the rim (at position rWi relative to the disk’s center) be F
Wi. The torque that
your fingers exert at this point will therefore be τ
Wi = rWi × F
Wi. Note that each rWi
is almost exactly parallel to the Frisbee’s plane, and that the force at every
such point is tangent to the Frisbee’s rim and therefore perpendicular to rW i.
W
The torque τ
i will in each case be perpendicular to the Frisbee’s plane. If the
Example C7.1
Careful description and
consideration of a model
Master equation for
this problem
Chapter C7
110
Drawing
Frisbee
Hand
ri
Fi
More About Angular Momentum
Frisbee’s angular velocity is upward (which we will define to be the +z direction), it must be spinning counterclockwise when viewed from above (see
the top view in figure C7.10, where the z axis faces us). The frictional force
required to slow it down therefore must point clockwise tangent to the rim,
W
meaning that each torque vector τ
i points purely downward (in the -z direction), which you can check with your right hand. The total torque your hand
exerts therefore has zero x and y components and a z component equal to
τz = ∑[ rWi × F
Wi]z = ∑−│ rWi││F
Wi││sin 90°│ ≈ −R∑│F
Wi│ = −R│F
W│
(C7.22)
W
because rW i and F
i are perpendicular at each point on the rim and │ rWi│ ≈ R in
each case. But by definition of the total torque, we have
Figure C7.10
Stopping a spinning Frisbee.
W
Both the z axis and ω
point
directly toward us in this top
W
view, but rW i × F
i points directly
away from us.
Lz(T) − Lz(0) _________
3MR2│ω
W│
0 − I│ω
W│
dL
−R│F
W│ = τz ≡ ___
z ≈ ___________
=
= − _________
4T
T
T
dt
if we assume the torque is constant during the interval T. Solving this for the
total force magnitude, we get
3MR│ω
W│
│F
W│ ≈ + _________
4T
Second master equation
Final check
(C7.23)
Algebra with
symbols
(C7.24)
Note that this is positive (as a magnitude must be), and has the right units for
a force (kg·m/s2 = N if │ω
W│ is in radians/s).
Exercise C7X.3
If M = 165 g, R = 13 cm, │ω
W│ = 8 turns/s = 16π rad/s, and T = 0.5 s, what
W
│
│
is F
? Does this result seem plausible?
C7.7
Angular momentum nicely
illustrates the link between
conservation and symmetry
The proof that orientation
symmetry implies conservation of angular momentum
Why Angular Momentum Is Conserved
I have claimed that conservation laws are a consequence of deep symmetries
in the laws of physics: conservation of momentum, angular momentum, and
energy are consequences of the fact that the laws of physics do not depend
on where you are, how you are oriented, and what time it is, respectively. In
the case of angular momentum, the link between the symmetry principle and
the conservation law is much easier to see than in the other two cases, so the
proof is well worth discussing.
Consider two interacting particles 1 and 2 located at positions rW1 and
rW2 (respectively) relative to some arbitrary origin O. Because the interaction
between these particles only transfers momentum from one to the other, the
W
rate at which momentum flows into the first (that is, the force F
1 exerted on
that particle) must be equal to the rate at which momentum flows out of the
W2, as F
other (that is, −F
W2 is defined to be the rate at which momentum flows into
W2. We have seen this before. But this particular principle
particle 2): F
W1 = −F
W
W
does not specify the direction of either F
1 or F
2, only that they must be equal in
magnitude and opposite in direction. In principle, F
W1 might point in any crazy
W
direction as long as F
2 is opposite, as shown in figure C7.11a.
But the laws of physics are independent of one’s orientation in space,
meaning that all directions in space are physically equivalent. Now, the two
interacting particles do define one and only one special line in space: the line
between them. How can the interaction “decide” whether to point its force
C7.7 Why Angular Momentum Is Conserved
111
F2= -F1
Can’t be true!
Could be true!
F2
Particle 2
r2 - r1
Particle 2
F1
Particle 1
r2
Particle 1
r2
F1
r1
(a)
r1
O
(b)
O
Figure C7.11
(a) The principle of momentum transfer requires that the forces exerted on two particles by the interaction
between them must be equal in magnitude and opposite in direction. (b) The fact that the laws of physics
are orientation independent means that the forces must also point either directly toward the other particle
(as shown) or directly away from that particle.
on one particle to the left (as in the figure) or right or up or down relative to
that line? The answer is, the interaction can’t. The only directions in which the
force on each particle can point are either directly toward (see figure C7.11b)
or directly away from the other particle along the line that connects them: only
these directions do not require the interaction to “choose” a direction from an
infinity of physically equivalent directions in space away from that line.
W2 either points parallel to
So orientation symmetry requires that F
W1 = −F
rW2 − rW1 (as in figure C7.11b) or opposite to rW2 − rW1. Now, the torques about O
W
W
W
W
that the interaction exerts on particles 1 and 2 are τ
1 = rW 1 × F
1 and τ
2 = rW 2 × F
2,
respectively. The total torque that the interaction exerts on these particles is
W
W
W
W1)
W1 + τ
τ
W2 = rW1 × F
1 + rW2 × F
2 = rW1 × F
1 + rW2 × (−F
W
W
= (rW1 − rW2) × F
1 = −(rW2 − rW1) × F
1=0
W
W2)
(because F
1 = −F
(C7.25)
because the cross product of parallel vectors is zero. This says that the interaction between the particles does not deliver any net angular momentum to
the two-particle system. If the interaction delivers angular momentum to one
particle, it must deliver the opposite angular momentum to the other: the
interaction transfers angular momentum without creating or destroying it.*
Note that while we must know the location of the arbitrary origin O to
numerically calculate the angular momentum, the preceding proof does not
depend on where O is actually located: we are completely free to choose that
our origin be wherever is most convenient.
*This proof technically applies only to interactions like the gravitational and electrostatic interactions that (1) act on particles at rest and (2) depend only on the particles’
relative positions. In the limit of slowly moving particles, all of the fundamental interactions of the Standard Model fit this description. However, all of these interactions
have much weaker “magnetic” aspects that depend on the particles’ velocities and/or
spins. Since velocities and spins define directions in space that are independent of the
line connecting the particles, the preceding proof does not cover these aspects. However, a much more complicated proof that takes into account these aspects (and the
fact that the interactions themselves can store angular momentum) yields the same
result with little additional insight. The argument above, even if incomplete, does provide a clear picture of (1) why angular momentum is conserved in the nonrelativistic
limit and (2) how this is connected to the orientation symmetry principle.
Angular momentum is conserved no matter what origin
we happen to choose
Chapter C7
112
More About Angular Momentum
TWO-MINUTE PROBLEMS
C7T.1 The lengths of the hour and minute hands of a clock
W
W
are 4 cm and 6 cm, respectively. If the vectors u
and w
represent the hour and minute hands, respectively, then u
W × w
W
at 5:00 pm is closest to
A. 24 cm2 out of the clock face.
B. 24 cm2 into the clock face.
C. 21 cm2 out of the clock face.
D. 21 cm2 into the clock face.
E. 12 cm2 out of the clock face.
F. 12 cm2 into the clock face.
C7T.2 The basic SI units of angular momentum are:
A. kg·m/s
B. kg·m2/s
C. kg·m·deg/s
D. kg·m2·deg/s
E. kg·m3/s
F. Something else (specify)
C7T.3 Suppose you are standing due east of a car traveling southwest. What is the direction of the car’s angular
momentum around you? Choose from the possible directions below (as seen by a person hovering over you), where
A is north, C is east, and so on. If you are using the letters
on the book’s back cover, you can indicate a double letter
by pointing to the letter with two fingers.
DD
B
C
v
D
5
4
A
2d
v
d
d
v
v E
v
2d
O
3d
C7T.8 Four people are sitting at the lettered positions on
the rim of a merry-go-round shown below that is slowly
turning clockwise. You throw a fairly massive ball horizontally to one of these people, who catches it. To which
person should you throw the ball so that catching it most
effectively increases the merry-go-round’s rotation rate?
A
D
You
B
C
Merry-go-round
A
B
CC
BB
C7T.7 The set of particles shown below all have the same
mass and speed. Which has the largest magnitude of angular momentum around the point O?
C
D
E. Upward
F. Downward
T. (The vector is zero)
AA
C7T.4 Suppose a jet is cruising at a constant velocity due
east. At the instant the jet is above your head, what is the
direction of the jet’s angular momentum around you?
Choose from the possible directions presented in problem
C7T.3, remembering that this is a top view, with A corresponding to north, C to east, and so on.
C7T.9 The angular momentum of a particle can be nonzero even if it moves in a straight line. T or F?
C7T.10 The angular momentum (around a rotating rigid
object’s center of mass) of an arbitrary particle in that object
points directly along the object’s rotation axis. T or F?
C7T.5 A friend is running clockwise at a constant speed on
a circular track. At the instant your friend is running due
east, your friend is due west of you. What is the direction
of your friend’s angular momentum around you at that
instant? Choose from the possible directions presented in
problem C7T.3, remembering that this is a top view, with A
corresponding to north, C to east, and so on.
C7T.11 (Tricky!) A bowling ball rolls on the floor at a constant velocity away from you. What is the approximate
direction of the ball’s total angular momentum around
your head? (Hint: How fast do the ball’s particles move
about the ball’s center of mass compared to the speed of
the ball’s center of mass as it moves away from you? Think
about it.)
A. Upward.
B. Downward.
C. To your left.
D. To your right.
E. Away from you.
F. It depends on the ball’s moment of inertia.
T. It depends on the ball’s rotation rate.
C7T.6 Suppose that u
W and w
W both have nonzero y and z
components, but both also have zero x components. Which
components of q
W = u
W × w
W are nonzero? Select or indicate all
the letters that apply.
A. qx is nonzero.
B. qy is nonzero.
C. qz is nonzero.
C7T.12 (Tricky!) Suppose that a batter hits a foul ball almost
exactly vertically in the air. As the ball rises, the magnitude
of the torque that the gravitational interaction exerts on the
ball around the pitcher:
A. Increases
B. Decreases
C. Remains roughly constant
Homework Problems
113
HOMEWORK PROBLEMS
Basic Skills
C7B.1 At a certain time, a 55-kg person is 25 m due north
of you and is walking at a speed of 1.2 m/s exactly southwest. What are the magnitude and the direction of this person’s angular momentum around you?
C7B.2 Under what conditions will a particle moving in a
straight line have a zero angular momentum about a given
origin point O? Under what conditions will such a particle
have a nonzero angular momentum around that point?
C7B.7 In the drawing below, the particles shown have
the same momentum magnitude │p
W│≡ p0. Calculate Lz, the
z component of the angular momentum of each particle
around the point O. Express your results in terms of p0 d.
(The z axis points directly toward us in this diagram.)
d
(a)
C7B.5 Consider a rider on a Ferris wheel of radius R that
lies in the xz plane and is rotating clockwise with anguW
lar velocity ω
. At every instant, then, a person riding on
the wheel’s rim is moving with speed R│ω
W│. Consider first
a rider of mass m who at a certain instant is passing the
highest point on the ride. Let O be the wheel’s center.
(a) At that instant, what is the magnitude and direction of
W ?
the rider’s linear momentum p
(b) What is the magnitude and direction of the rider’s
position vector rW relative to O?
(c) What are the magnitude and the direction of rW ⊥?
W and rW ?
(d) What is the plane defined by the vectors p
(e) What are the magnitude and the direction of the r­ ider’s
W
angular momentum L
about O at that instant?
W in
(f) Write out the components of the vectors rW and p
the specified reference frame and use the component
definition of the cross product to calculate L
W. Is your
answer the same you found in part (e)?
Suppose the wheel then rotates θ = 45° clockwise
so that
_
the rider’s position rW is [R sin θ, 0, R cos θ] =
_ 12 [R, 0, R].
(g) What are the magnitude, direction, and components of
W now?
the rider’s linear momentum p
(h) What is the magnitude and direction of rW ⊥?
W now?
(i) What is the plane defined by rW and p
(j) What is the magnitude and direction of the rider’s
W
angular momentum L
about O now?
(k) Use the component definition of the cross product to
check your answer for part (j).
C7B.6 A simplistic model of the hydrogen atom imagines
the electron to be in a circular orbit around a motionless
proton. The radius of the electron’s orbit in this model is
0.053 nm and the electron’s orbital speed is c/137, where c
is the speed of light.
W
(a) What is │L
│ for the electron in its orbit?
(b) How does the electron’s angular momentum compare
with ℏ ≡ h/2π = 1.054 × 10–34 kg·m2/s?
(b)
p
(c)
d
d
C7B.3 Consider the following two displacement vectors:
W
W
u
= [3 m, 0, −2 m] and n
= [−1 m, 5 m, 2 m]. Find the components of the cross product u
W × n
W.
C7B.4 What is a particle’s angular momentum around the
point O if its position relative to O is rW = [3 m, 5 m, −2 m],
W = [1 m/s, 0, −2 m/s], and its mass is 0.5 kg?
its velocity is v
d
(f)
(d)
(e)
O
C7B.8 Consider an extended object comprised of four
small balls with equal masses _14 M connected together in the
cross shape shown below by rods having negligible mass.
The center of each ball is a distance R from the object’s center at point O. The object is rotating around a vertical axis
through point O with an angular velocity │ω
W│. Model the
balls as point objects (whose radius << R).
ω
1
2
1
4
M
z
R
O
45°
3
4
1
2
x
(the y axis
points away
from us)
R
First consider the object as four individual moving point
particles numbered 1 through 4 as shown.
W
(a) What is each ball’s speed in terms of R and │ω
│?
(b) What is each ball’s momentum p
Wi (i = 1 through 4)
at the instant shown? Write each as a column vector,
expressing each component in terms of M, R, and │ω
W│.
Pay careful attention to signs.
(c) What is each ball’s position vector rWi relative to O?
Again write each as a column vector.
(d) Use the component definition of the cross product
to calculate the components of each ball’s angular
W
momentum vector L
i about O.
(e) What are the magnitude and direction of the object’s
W
total angular momentum L
?
Now consider the object as a single extended body.
(f) What is this object’s moment of inertia I?
(g) What are the magnitude and direction of the object’s
W
W?
angular momentum L
= I ω (h) Should the result for part (g) be the same as the result
for part (e)? Is it the same?
Chapter C7
114
More About Angular Momentum
C7B.9 A 7-kg bowling ball (whose radius is 0.13 m) is rolling directly toward you at 2.5 m/s, rotating at 3 turns/s.
(a) What are the magnitude and the direction of the ball’s
rotational angular momentum around your feet?
(b) What are the magnitude and the direction of the angular momentum of the ball’s center of mass around your
feet?
C7B.10 Using the concept of torque, explain why using a
longer wrench would make it easier to loosen a stubborn
nut or bolt than using a shorter wrench would.
C7B.11 A wheel 60 cm in radius is connected to an axle that
is 1.5 cm in radius. Someone pulls with a force of 50 N on
a thin cord wrapped around the axle. How much force do
you have to exert on the wheel’s rim to prevent the wheel
from rotating? Please explain your response.
C7M.3 A certain satellite is shaped like a cylinder of mass M
and radius R. It has two solar panels attached to the cylinder like wings, each with mass _ 14 M and length 4R. The satellite is initially not rotating. Suddenly, one of the panels
is struck by a particle of space debris with a small mass m,
whose straight-line trajectory passes through the panel a
distance d from the satellite’s axis and makes an angle of
θ with respect to the panel’s surface, as shown below. The
bit of debris continues following the same ­linear ­trajectory
after impact, but the impact decreases its speed from
│v
W0│ to │v
W1│. What is the magnitude │ω
W│ of the ­satellite’s
angular velocity after the impact? [Hints: Model the panels
as thin rods that are both rotating and moving as the satellite rotates. Also assume that m is small enough compared
to M that the satellite’s center of mass remains approximately at rest.]
v1
Modeling
C7M.1 Consider a double-planet system consisting of two
planets of equal mass M and equal radius R. The planets
are separated by a fixed center-to-center distance of D.
They each follow a circular orbit around their common
center of mass, orbiting once during a time T. Assume that
the planets have an approximately uniform density. Also
assume (quite realistically) that the two planets are tidally
locked, meaning that each always presents the same hemisphere to the other.
W
(a) Determine the magnitude │L
│ of the system’s total
angular momentum. Do not treat the planets as point
masses, but rather as objects that both move and rotate.
(b) If you were to treat the planets as point masses, by
W
what fraction would your calculation of │L
│ be off?
(c) At what separation distance D would this fractional
error fall below 1%?
C7M.2 A bicycle wheel with radius R, mass M, and moment
of inertia I = _ 34 MR2 is mounted in the shop so that it can
freely turn around a fixed horizontal axis. Someone walking by accidentally drops a glob (mass m << M) of rubber
cement on the tire at a point that is a horizontal distance _ 12 R
from the wheel’s center, as shown below. The glob has a
vertical speed of │v
W│ just before it hits. What is the magnitude │ω
W│ of the wheel’s angular velocity just after the glob
hits and sticks?
1
2
R
Glob,
mass m
v
R
Wheel,
mass M
θ
Particle, mass m
R
4R
Solar panel,
d
1
Satellite, mass M mass 4 M
v0
C7M.4 During a certain physics experiment, a buckyball (a C60 molecule shaped like a hollow ball) of mass M
and radius R is struck by an electron of mass m having a
(nonrelativistic) speed │v
W0│. The electron rebounds at a 90°
angle with virtually the same speed (technically the speed
will be a tiny bit less for reasons having to do with conservation of energy, but the two speeds are the same to many
decimal places). The point of impact is shown below.
Electron, v0
mass m
v0
θ = 53.1°
ϕ = 36.9°
ϕ
θ
R
Buckyball
mass M
Note that sin θ = cos ϕ = _ 45 and sin ϕ = cos θ = _ 35for the
angles θ and ϕ given. Note also that the buckyball’s mass
is so much larger than the electron’s mass that it essentially
remains at rest after this interaction. Model the buckyball
as a hollow sphere.
(a) If the buckyball was not rotating before it was struck,
how fast must it rotate afterward? Find its rotation
period T in terms of m, M, R, and │v
W0│.
(b) A buckyball has a mass that is 1.3 million times larger
than that of an electron, and has a radius of 0.50 nm. If
the electron was moving at 3.0 × 106 m/s (about 1/100
of the speed of light), calculate T.
Homework Problems
C7M.5 Suppose an asteroid with a mass that is a billionth
of the mass of Mars is moving along a trajectory that lies
in Mars’s equatorial plane but along a line (just before it
hits) that misses Mars’s center by 4/5 of Mars’s radius.
The asteroid’s velocity relative to Mars’s center when it
hits is in the same direction but 30 times larger than the
velocity that a point on Mars’s equator moves relative to
its center due to the planet’s rotation. The asteroid buries
itself in Mars’s crust after the impact. What is the fractional
increase in Mars’s angular speed of rotation due to this
strike? [Hints: Note that the planet’s moment of inertia I
is changed only in the 9th significant digit by absorbing
the asteroid, so you can consider I to be unchanged. Also,
since the asteroid’s mass is very small compared to that of
Mars, you can assume that Mars remains nearly at rest.]
C7M.6 A cat is sitting on the rim of a wooden turntable that
is free to turn around a vertical axis. The turntable’s mass
is 3 times the cat’s mass. If the cat starts walking along the
rim at a speed of │v
W0│ with respect to the ground, how fast
will the turntable’s rim move relative to the ground?
C7M.7 A safety table saw uses a braking system to stop the
saw blade from rotating if it senses that the blade is touching the user’s finger. To avoid injuring the finger, the blade
must be stopped within the time it would take the blade to
rotate about 1/20 of a turn at full speed. Assume the saw
blade is essentially a flat disk with mass M and radius R,
and rotates once in time T at full speed.
W
(a) What is the magnitude │F
│ of the constant force that
the brake must exert on the rim when tripped in terms
of these quantities?
(b) If the saw blade has a radius of 13 cm, a mass of 600 g,
W
and rotates at 3000 rpm, what is │F
│? (The braking system used in safety saws exerts this enormous force by
jamming a soft aluminum block into the blade’s teeth.
The force is exerted as a result of the teeth burying
themselves in the block.)
Derivations
C7D.1 Show that equations C7.7c, d, and f follow from the
definition of the cross product.
C7D.2 One can prove the distributive property of the cross
product from its definition as follows. First note that we
W
W
can calculate the cross product u
× n
using the following
sequence of steps (see figure C7.12): Let be the plane
perpendicular to u
W. (1) Project n
W onto that plane to create
the vector n
Wp. Note that the magnitude of this vector is
│n
W
W
Wp│ = │n
W││sin θ│, where θ is the angle between u
and n
.
W
(2) Now rotate n
p 90° in the plane (counterclockwise
W
W
when u
faces us) to create the vector n
r. This vector will
W
W
be perpendicular to both u
and n
, and you can check with
your right hand that n
Wr points in the same direction as we
W
W
have defined u
× n
W to point. (3) Then, multiply n
r by │u
W│.
The resulting vector │u
W│n
Wr has the same direction and the
same magnitude │u
W││n
Wp│= │u
W││n
W││sin θ│, so the vector creW
ated by this three-step process is equivalent to u
× n
W.
115
u
u × n = u nr
3
θ
n
2
θ
1
nr
90°
np
Figure C7.12
W
W
W
Three steps to construct u
× n
W: (1) project n
onto ⊥ u
,
(2) rotate CCW 90°, and (3) multiply by │u
W│.
n +s
s
(n + s ) p
1
sp
u
n
nr
np
(n + s )r
2
sr
Figure C7.13
W
Performing the first two steps on the triangle of vectors n
, s
W,
W
and n
+ s
W.
Now consider a completely independent vector sW.
W
W
W
If we place its tail at n
’s tip, then the vectors n
, sW , and n
+ sW
form a triangle, as shown in figure C7.13. Projecting these
vectors on the plane creates projected vectors n
Wp, sWp , and
W + sW )p. But these projected vectors also form a triangle, so
( n
W + sW )p = n
W
by the definition of vector addition, ( n
p + sW p . We
can then rotate these vectors by 90° in the plane to ­create
W
W + sW )r. Since these vectors still
new vectors n
r, sWr, and ( n
W + sW )r = n
form a triangle, we see that, again, ( n
Wr + sWr.
W + sW )r.
Now apply step 3 to the vectors n
Wr, sWr, and ( n
Use the equation from the previous step and basic principles of vector addition and multiplication by a scalar to
prove the distributive property of the cross product. Show
each step and describe your reasoning for that step.
C7D.3 Our goal in this problem is to prove the component
expression for the cross product (equation C7.9).
(a) Use the definition of the cross product to argue that
eWx × eWy = +eWz,
eWy × eWz = +eWx,
eWz × eWx = +eWy
(C7.26)
where eWx, eWy, and eWz are unit-magnitude vectors in the
+x, +y, and +z directions, respectively. (Hint: Draw
pictures of right hands next to coordinate axes.)
(b) Note that we can write u
W = ux We x + uy eWy + uz eWz and n
W =
nx eWx + ny eWy + nz eWz. Use this, the distributive and anticommutative properties of the cross product, and the
fact that a
W × a
W = 0 for any vector a
W to prove that equaW
tion C7.9 correctly gives the components of u
× n
W.
Chapter C7
116
mi
More About Angular Momentum
Wi × mi v
W CM = mi q
W i × v
W CM (because
We can also write q
the cross product is linear) and pull factors that don’t
depend on i outside of the sum. Show, therefore, that
equations C7.31 and C7.29 and the fact that M = ∑ mi
together imply that
qi
CM
ri
rCM
W = (∑ q
Wi × mi u
WCM
L
Wi ) + 0 + 0 + rWCM × M v
object
O
Figure C7.14
The relationship between rW i, q
Wi, and rW CM for an arbitrary
­particle of mass mi in an arbitrary object.
C7D.4 The goal of this problem is to prove that when
an object is both rotating and moving, its total angular
momentum around a given origin point O is L
W = L
WCM + L
Wrot
(see equation C7.16). We begin by modeling an arbitrary
object as a set of particles, the ith of which has mass mi
and position rW i relative to O and position q
Wi relative to the
object’s center of mass (see figure C7.14). Let the position of
the object’s center of mass relative to O be rW C M (as shown).
(a) Note that by the definition of the vector sum, these
vectors satisfy the relationship rWi = rWC M + q
Wi. Show that
if we subtract this relationship evaluated at an arbitrary time t from the same relationship evaluated at
time t + ∆t and divide both sides by ∆t, we get
Wi = v
W CM + u
W
v
i
(C7.27)
as ∆t becomes very small, where v
Wi and u
Wi are the ith
particle’s velocities relative to O and the object’s center
of mass, respectively, and v
WCM is that center of mass’s
velocity with respect to O.
(b) The definition of a system’s center of mass and the fact
that a system’s total momentum is equal to the system’s total mass M times the velocity v
WCM of that center
of mass together imply that
WCM = ∑ mi v
M rWCM = ∑ mi rWi and M v
Wi
i
i
(C7.28)
where in both cases, the sum is over all particles in the
W i and
system. Using this and the relations rW i = rW CM + q
v
Wi = v
WCM + u
Wi, show that
W i and 0 = ∑ mi u
W
0 = ∑ mi q
i
i
i
(C7.29)
This expression is what we sought, because its first
term is the object’s angular momentum due to its rotation around its center of mass, and its last term is the
object’s angular momentum about O computed as if
the object were a particle located at its center of mass.
Rich-Context
C7R.1 One possible way to create a long-term space habitat is to take a roughly cylindrical asteroid, hollow it out,
fill it with air, and set it spinning around its long axis so
that people walking on its inner curved surface feel an
apparent gravity-like force away from the rotation axis
(for reasons discussed in unit N). Consider an iron asteroid
(density ≈ 7900 kg/m3) shaped like a cylinder with length
ℓ = 5.0 km and radius R = 1.5 km. Suppose we hollow it
out so what remains is a can-like shell s = 100 m thick.
The spin rate required to create an apparent gravity-like
force whose magnitude is half of what one experiences on
the earth turns out to be about 1 revolution per 100 s for
an asteroid of this size. We will spin it up using two rocket
engines attached on opposite sides of the asteroid’s “equator” (considering the asteroid’s flat ends to be its “poles”:
see figure C7.15.) These advanced fusion rocket engines
eject propellant at a speed of │v
W│= 20,000 m/s.
(a) How much propellant mass m do we need to spin up
the asteroid? (Hint: Find the asteroid’s moment of inertia by summing the moments of inertia of its various
parts. Model the propellant as two big particles that
the two engines eject simultaneously in one burst. This
turns out to be a good model here, even if the engines
actually were to fire for a long time: see the final part.)
(b) Find a symbolic expression for m/M, where M is the
asteroid’s final mass. On what does this ratio depend?
(c) Compute the numerical value of m/M for our asteroid.
(d) (Challenging!) Why can we model the propellant in
this situation as two big particles? (Hint: Show that the
(c) Because the cross product is distributive, we see that
W
the object’s total angular momentum L
around O is
W = ∑ rWi × mi v
Wi + rWCM) × mi ( u
Wi + v
L
Wi = ∑ ( q
WCM)
i
Wi × mi u
= ∑ ( q
Wi + q
Wi × mi v
WCM
+ rWCM × mi u
Wi + rWCM × mi v
WCM)
(C7.30)
We are perfectly free to write this sum over i of four
terms as a sum of four separate sums over i:
W = ∑ q
Wi × mi u
W
Wi × mi v
W CM
L
i + ∑ q
i
i
+ ∑ rWCM × mi u
Wi + ∑ rWCM × v
WCM
i
i
Rocket
v
Figure C7.15
i
i
(C7.32)
i
(C7.31)
How to spin up a
hollowed-out asteroid
for use as a habitat
in space. Note that ω
W
points directly toward
us in this diagram. The
cylindrical asteroid has
length ℓ in the direction perpendicular to
the diagram.
R
s
Hollowed-out
asteroid
-v
Answers to Exercises
117
speed of a point on the rotating asteroid’s equator is
always much smaller than │v
W│, and use that to show
that a given “chunk” of propellant carries away the
same amount of angular momentum no matter when
it is ejected by the engine.)
C7R.2 The earth–moon system is a curiosity in the solar
system. No other planet–moon system has as large a fraction of the system’s mass tied up in the moon. The moon
has far less iron than it should have if it formed at the same
distance from the sun as the earth. Finally, the total angular momentum per unit mass in the earth–moon system is
much larger than for any other planetary system.
In the 1980s, astrophysicists began to see that these
and other anomalies might be explained if the moon was
created from debris resulting from the collision of a very
large object (impactor) with the proto-earth during the end
stages of the earth’s formation. In this scenario, the impactor formed in roughly the same orbit around the sun as the
earth, but eventually their orbits crossed and the collision
occurred. The earth–moon system’s angular momentum
was mostly due to the impactor’s large angular momentum relative to the earth at the time of impact.
(a) To better understand what we need to predict, let’s
first consider the present situation. Let m and M be
the masses of the earth and moon, respectively, let r
and R be the moon’s and earth’s radii, respectively,
and let T be the earth’s period of rotation (1 day).
Note that the period of the moon’s orbit = 27.3T
(≈ 1 month). Also m ≈ 0.0123M (easy to remember:
0123!), r ≈ R/3.67, and the radius of the moon’s orbit ≈
60R. Use this information to determine both the
system’s total angular momentum │L
W│ around the
earth’s center of mass in terms of the earth’s rotational
angular momentum │L
We│ and the fractions of │L
W│ that
are due to (1) the moon’s rotation, (2) the earth’s rotation, and (3) the motion of the moon around the earth.
As a first approximation, assume that the angular
momenta due to each of these motions point in the
same direction (they don’t quite) and also that the
earth is massive enough compared to the moon that
it remains essentially at rest. [Hint: The moon always
presents the same face to the earth, so what is its (nonzero!) rotation period?]
(b) Let γM be the impactor’s mass. Assume the proto-earth
and impactor were not rotating before the impact, and
that the system was isolated from just before the impact
to the present. If the impactor and the proto-earth were
formed basically in the same orbit around the sun, they
would have been moving at the same speed around
the sun (and thus were at rest with respect to each
other) until they came close enough to interact gravitationally. The impactor’s speed on impact should therefore be about the same as that of any object arriving at
the earth’s surface after starting from rest a very large
distance away. In the next chapter, we will see that this
speed is about │v
W│≈ 11.2 km/s.
Computer models imply that the current features of
the earth–moon system are best explained if the impactor’s center of mass just before impact was traveling
along a line that would have missed the earth’s center
by about R (at this distance, enough impactor material misses the proto-earth to go into orbit and form
the moon, but most of the impactor’s central iron core
ends up being gobbled up by the proto-earth). Given
this, calculate γ, and compare the impactor’s mass to
that of Mars ≈ 0.107M. (Hint: Show that if R = 6380 km,
│v
W│≈ 24R│ω
W│: this will make things easier. Considering the approximations we have made, our estimate of
γ will probably be only good to within about ±50%.)
ANSWERS TO EXERCISES
W
W
C7X.1 We know that u
lies on the x axis and n
points at an
angle of 30° with respect to the x axis in the xy plane, and
that │u
W│ = 2 m and │n
W│ = 4 m.
W
(a) │u
W × n
│ = │u
W││n
W││sin 30°│ = (2 m)(4 m) _12 = 4 m2. A bit of
W
W
work with your right hand shows that u
× n
points in
the +z direction.
(b) Note that
__
__
cos
30°
nx
3 /2
23 m
n
y =│n
W│
sin 30°
= (4 m)
=
2m
1/2
[ nz ]
[ 0 ]
[ 0 ] [ 0 ]
(C7.33)
(c) According to equation C7.9, and noting that ux =
2 meters, and uy = uz = 0, we have
uynz − uzny
0
0
uznx − uxnz =
W × n
=
u
W =
0
0 (C7.34)
[ uxny − uynx ] [ (2 m)(2 m) − 0 ] [ 4 m ]
This agrees with the result in part a.
C7X.2 A bit of work with your right hand shows that the
W CM around
Frisbee’s center of mass has an angular momentum L your body that points upward. According to figure C7.7,
W CM│ = bM│v
│L
W│ = (1 m)(0.165 kg)(12 m/s) = 1.98 kg·m2/s.
If the Frisbee is turning clockwise, its angular velocity
ω
W and thus its rotational angular momentum is downward and has a magnitude of │L
Wrot│ = I│ω
W│ = _ 34 MR2│ω
W│ =
2
2
(0.75)(0.165 kg)(0.13 m) (8·2π rad/s) = 0.105 kg·m /s. Its
total angular momentum L
WCM + L
Wrot therefore points upward,
W
W rot│= 1.87 kg·m2/s.
│
│
│
but has a magnitude of L
CM − L
C7X.3
Substituting the numbers into equation C7.24 yields
(
)
3(0.165
kg
)(0.13 m)(16π/s@) __________
3MR │ω
W│ ________________________
W
│F
│ = _________
=
1 N
4T
4(0.5 s@ )
1
kg · m/s@2
= 1.62 N
(C7.35)
Since 4.45 N = 1 lb, this is a bit more than a third of a pound,
which seems like a credible force to exert with one’s hand.
C8
Conservation of
Energy
Chapter Overview
Section C8.1: Introduction to Energy
A system’s total energy E is the sum of the kinetic energies of its constituent fundamental particles and the potential energies of the interactions between them:
E = K1 + K2 + K3 + ⋯ + V12 + V13 + ⋯ + V23 + ⋯
(C8.2)
Like momentum, the total energy of an isolated system is conserved. However,
energy is unlike momentum and angular momentum in that (1) energy is an ordinary
number, not a vector, and (2) interactions as well as objects can contain energy.
Section C8.2: Kinetic Energy
K = _ 12 m│v
W│2 or equivalently,
│p
W│2
W│)2 ____
(m│v
K = _ 12 _______
m
=
2m
(C8.3)
• Purpose: This equation describes the kinetic energy K that a particle of mass m
W│ or with momentum pW .
contains when it is moving with speed │v
• Limitations: This equation is an approximation that is accurate when the particle’s speed │v
W│ << c, where c is the speed of light. It also applies to objects
modeled as particles if │v
W│ is the speed of the object’s center of mass.
Energy is measured in joules, where 1 J = 1 kg·m2/s2, which are clearly the units of K.
When a low-mass object interacts with a much more massive object (such as the
earth) initially at rest, we can ignore the massive object’s kinetic energy.
Section C8.3: Potential Energy
A fundamental interaction’s potential energy depends only on the interaction, the
characteristics of the interacting particles, and the separation r between the particles.
However, for reasons discussed in the section, we can only define an interaction’s potential energy up to an overall position-independent constant. We usually
specify this constant by specifying a reference separation where V ≡ 0. An interaction’s potential energy can thus be negative in a situation where it has less energy
than it would have at the reference separation. Even a system’s total energy E can be
negative if the system has less energy in a situation than it would with all its particles
at rest at their reference separations.
The section illustrates how by choosing a different reference separation, we can
adapt the large-scale gravitational potential energy formula to make it more useful
for objects moving near the earth’s surface.
Section C8.4: Fundamental Potential Energy Formulas
Of the four fundamental interactions in the Standard Model of particle physics, only
the gravitational and electromagnetic interactions act over macroscopic distances.
­Potential energy formulas for the gravitational interaction and the electrostatic aspect
of the electromagnetic interaction are as follows:
118
reference separation:
m m2
____________________
Vg(r) = −G _____
1
r
[ Vg(r) ≡ 0 when r = ∞ ]
(C8.12)
• Purpose: This is the potential energy function Vg(r) for the gravitational interaction between two particles or spherical objects whose masses are m1 and m2
and that are separated by a (center-to-center) distance r. G is the universal
gravitational constant: G = 6.67 × 10-11 N·m2/kg2.
• Limitations: This equation technically applies only to particles and/or spherical objects at rest. But it is an excellent approximation if the interacting objects’
speeds are small compared to that of light.
reference separation:
Vg(z) = m│g
W│z ____________________
[ Vg(z) = 0 when z = 0 ]
(C8.13)
• Purpose: This is the potential energy function Vg(z) for the gravitational interaction between the earth and a small object of mass m near the earth’s surface,
where z is the small object’s vertical position and │g
W│ = 9.8 m/s2 is the gravitational field strength at the earth’s surface.
• Limitations: This is an approximation that is sound when all positions z of interest (including the point where z = 0) are within ~50 km of the earth’s surface,
and the object’s speed is small compared to that of light.
( )
q1q2
reference separation:
1 ____
____________________
Ve(r) = _____
4πε0 r
Ve(r) ≡ 0 when r = ∞
(C8.14)
• Purpose: This is the potential energy function Ve(r) for the electrostatic part
of the electromagnetic interaction between two particles or uniformly charged
spherical objects whose charges are q1 and q2 and that are separated by a
(­center-to-center) distance r. We call the constant 1/4πε0 (which we write that
way for historical reasons) the Coulomb constant: 1/4πε0 = 8.99 × 109 N·m2/C2.
• Limitations: This equation strictly applies only to particles (or spherical
objects) at rest, but is a good approximation as long as the particles’ speeds are
small compared to the speed of light.
Section C8.5: Internal Energy and Power
As we will see in later chapters, a macroscopic object can contain internal energy U
in “hidden” forms. In this chapter, we will assume that these energies do not change
and thus cancel out of the conservation of energy master equation.
Power is the rate at which energy is transported or converted in a physical process. It is measured in watts, where 1 W = 1 J/s.
Section C8.6: Isolation
A system’s energy is conserved only if it is isolated. In general, we must ensure that a
system is not only isolated in one of the ways required for momentum conservation
but also that energy cannot flow into or out of the system in some hidden form. In this
chapter we will only consider situations where such flows do not occur.
Section C8.7: Solving Conservation-of-Energy Problems
This section presents several example problem solutions. These examples illustrate
that when constructing models for conservation of energy problems, we have to consider how we are going to handle each internal interaction (something we did not
have to worry about with conservation of momentum or angular momentum).
119
120
Chapter C8
C8.1
Definitions of potential and
kinetic energy
Conservation of Energy
Introduction to Energy
Energy is one of the richest and most productive ideas in all of physics. It is
also more subtle than the other conservation laws. While Newton himself
knew that interactions conserve momentum, it was not until the 1840s that
physicists realized fully that energy was also universally conserved. My goal
in this section is to introduce the concept of energy as it applies to elementary
particles and fundamental interactions, where the model is simplest.
In addition to momentum and angular momentum, interactions transfer energy, expressing the symmetry that the laws of physics do not depend
on what time it is. But though only particles can contain significant amounts
of momentum or angular momentum,* interactions can contain significant
amounts of energy, which we call the interaction’s potential energy V. This
potential energy is an ordinary number (not a vector) that depends on the type
of interaction and the particles’ physical separation. Each particle also contains a certain amount of kinetic energy K, an ordinary number that increases
as a particle’s speed increases. Any change in the interacting particles’ separation leads to a transformation of energy from the interaction’s potential energy
V to the particles’ kinetic energies K1 and K2, or vice versa. Because energy is
transformed (not created or lost), a two-particle system’s total energy
E = K1 + K2 + V
Kinetic, potential, and
total energy in a multiparticle system
is conserved. All of the Standard Model’s core interactions behave this way.
Figure C8.1 illustrates this idea in the context of two particles floating
in space that attract each other gravitationally (which is one of the Standard
Model’s core interactions). The potential energy of a gravitational interaction happens to decrease as the particles get closer, so interaction causes the
particles’ speeds to increase at just the right rate so that the increase in their
kinetic energies balances the decrease in the interaction’s potential energy.
If a system contains more than two interacting particles, its total energy
(as one might guess) is the sum of all the particle’s kinetic energies and the
potential energies of all the system’s internal interactions:
E = K1 + K2 + K3 + ⋯ + V12 + V13 + ⋯ + V23 + ⋯
Energy, like momentum, is
conserved
But energy is different than
momentum in several ways
(C8.1)
(C8.2)
where V12 is the potential energy of the interaction between particles 1 and 2,
V13 is the same between particles 1 and 3 and so on. If more than one interaction acts between a given pair of particles, we should include a potential
energy term for each interaction. This simple definition of the total energy
applies whenever the Newtonian approximation applies (otherwise the definition becomes a bit more complex).
Because a system’s internal interactions only involve transformations
between kinetic and potential energies that appear in this sum, the system’s
total energy is not changed by such interactions. But external interactions can
affect the kinetic energies of the system’s particles and so transfer energy into
or out of the system. A system’s total energy E (like its total momentum and
total angular momentum) is therefore conserved only if the system is isolated.
Even so, energy is different than momentum and angular momentum in
several important ways. First, note that E, K, and V are just numbers, while
W
momentum p
W (and angular momentum L
) are vectors. Second, because interactions do not store momentum or angular momentum but can store potential
energy, internal interactions do not contribute to a system’s total momentum
*Actually, interactions do store momentum and angular momentum but for reasons
beyond our scope here, the amounts stored are significant only in unusual situations,
and in those cases, other models are typically more useful.
C8.2 Kinetic Energy
121
Figure C8.1
ri
(a)
m1
(v1 = 0)
E = all V
r
(b)
m1
(c)
m2
(v2 = 0)
v1
v2
E = some K + smaller V
m2
The gravitational interaction
between two particles transforms
some of its potential energy to
the particles’ kinetic energies
without changing the system’s
total energy.
rf
m1
v1f
E = more K + still smaller V
v2f m2
or angular momentum but do contribute to its total energy. Finally, though we
can always determine a system’s total ordinary momentum from the velocity
of its center of mass, or its angular momentum from its rotation rate, we will
see in subsequent chapters that a system can store energy in “hidden” forms
not linked to the macroscopic motions of the system’s parts.
C8.2
Kinetic Energy
Physicists in the 18th and 19th centuries found that the previous section’s
model works experimentally if we assume that a particle’s kinetic energy is
K = _12 m│v
W│2
or equivalently,
│p
W│2
W│)2 ____
(m│v
K = _ 12 _______
=
2m
m
(C8.3)
• Purpose: This equation describes the kinetic energy K that a particle
W .
W│ or with momentum p
of mass m contains when it moves at speed │v
• Limitations: This equation is an approximation that is useful when
│v
W│ << c, where c is the speed of light. It also applies to a nonrotating
macroscopic object if │v
W│ is the speed of the object’s center of mass.
Equation C8.3 implies that the SI units of kinetic energy (and thus all
other forms of energy) must be kg·m2/s2. Since energy is such an important
concept in physics, it has its own SI unit, the joule, where
1 J ≡ 1 joule ≡ 1 kg·m2/s2
(C8.4)
is roughly the kinetic energy of a half-gallon carton of milk moving at 1 m/s.
Consider now an isolated system consisting of two particles (or macroscopic objects that we can model as particles). Suppose the particles have
masses m1 and m2 and are initially at rest in some frame. The particles then
interact. Since the system’s total momentum is initially zero and must be conW 1 from the interaction,
served, if the first particle ultimately gets momentum p
W 2 = −p
W1. Equation C8.3 then implies that
the other must get p
W1│2 ___
K2f │p
W2│2 2
│ − p
m1 m1
@ m1
___ = _____ _____2 = ______
= ___
2
K1f
W1│
│p
W1│ m2 m2
2
@m2 │p
(C8.5)
So, while the internal interaction always gives the particles equal magnitudes
of momentum (assuming they start from rest), it gives each a kinetic energy
inversely proportional to its mass. So if m1 << m2, then K2 << K1. This means that
The kinetic energy that
a moving object contains
122
A rule when objects with very
unequal masses interact
Chapter C8
Conservation of Energy
Whenever an object interacts with a far more massive object, we can
ignore the massive object’s kinetic energy.
We will find this result very useful in what follows, particularly when objects
with human-scale masses interact with the earth. (This works even when the
less massive particle is not at rest initially: see problem C8D.1.)
C8.3
How to measure an interaction’s potential energy
Potential Energy
The definition of kinetic energy provides a way to experimentally determine
the potential energy of the interaction between two particles. Consider an
isolated system whose two particles participate in a single internal interaction. Let the particles initially have kinetic energies K1i and K2i and separation
ri and let the system evolve under the influence of the internal interaction to
a new configuration where the particles have final kinetic energies K1f and K2f
and separation rf . Conservation of energy requires that
K1f + K2f + V(rf) ≡ Ef = Ei ≡ K1i + K2i + V(ri)
⇒ V(ri) − V(rf) = K1f + K2f − K1i − K2i
Potential energy is defined
only up to an overall constant
(C8.6)
If we measure the particles’ kinetic energies in both cases, we can therefore
determine the change in the interaction’s potential energy when the particles’
separation changes from ri to rf.
But this procedure (which provides the only way of measuring an interaction’s potential energy V) only determines the difference between V(rf)
and V(ri), not the values of V(rf__
) and V(ri) separately. Indeed, if we define a
new potential
energy function V
(r) ≡ V(r) + C, where C is a constant, then
__
__
(rf) − V(ri) = [V(rf) + C] − [V(ri) + C] = V(rf) − V(r
V
__ i) still satisfies equation
C8.6. Therefore, we cannot physically distinguish V
(r) and V(r):
All potential energies V (and thus all total energies E!) are defined
only up to an overall constant, which we may choose at will.
A (gravitational) example of
choosing the constant by
defining a reference separation
You may find it disturbing that we cannot unambiguously define an
interaction’s potential energy when the particles it connects have a given
separation. But the flip side of ambiguity in this case is freedom. The laws of
physics never involve anything but the difference V(rf) − V(ri). This means that
those laws also don’t ever care what overall constant we assign to the potential energy, so we can choose that constant to be anything that is convenient!
One way to (implicitly) define the value of C is to specify a reference
separation r0 for the interaction and set the constant so that V(r0) ≡ 0 at that
separation. Let’s see how this works by considering the gravitational interaction as a specific example.
We can use the above method to determine how the potential energy
of the gravitational interaction between two particles with masses M and m
­varies with the particles’ separation r. We empirically find that
GMm
Vg(r) = C − ______
(in general)
r
(C8.7)
where G = 6.67 × 10-11 N·m2/kg2 and C is a constant whose value we cannot
determine for the reasons stated above. Note that this formula says that as the
separation between the particles decreases, the gravitational potential energy
also decreases, because the subtracted term becomes larger in magnitude and
thus more negative (as figure C8.1 implies). Note also that the units of GMm/r
2
2
2
2
are (N·m2/kg
)(kg
)/m = N·m = J because 1 J = 1 kg·m /s = 1 N·m.
C8.3 Potential Energy
123
In this case, we may find it convenient to set our reference separation r0
to be infinity. Setting Vg(r0) = 0 then implies that 0 = C - GMm/r0 = C - 0 = C,
so choosing r0 = ∞ is the same as choosing C = 0. This choice is convenient
because it makes the gravitational potential energy formula nicely compact:
GMm
Vg(r) = − ______
(when r0 = ∞)
r
(C8.8)
In other situations, however, a different choice may make more sense, as
the following example illustrates. Before I start the example, though, let me
note that the total potential energy of the gravitational interactions between
all the particles in a spherical macroscopic object and an external particle
turns out (miraculously) to be the same as if the spherical object’s mass were
concentrated at a point at the object’s center (see problem C8D.2).
So consider a situation where the earth (with mass M) interacts with a
­particle (or a small object modeled as a particle) of mass m near the earth’s surface. In this case, we can define the reference separation r0 to be the earth’s
radius R, so that the external particle has zero potential energy at the earth’s surface. This is the same as choosing C = GMm/R in equation C8.7, because
Vg(r) = ______
GMm
− ______
GMm
(when r0 = R)
R
r
(C8.9)
is indeed zero when r = r0 = R. This makes Vg (more intuitively) positive whenever the external particle is above the earth’s surface (r > R). It also makes
Vg a smaller and more manageable number than -GMm/r when r is close to
R (-GMm/r ≈ -62 million joules for a 1-kg object at the earth’s surface!).
However, when r ≈ R, using this formula still involves calculating the
small difference between two large and nearly equal numbers. But we can
make a very useful approximation as long as the external object is not too far
from the earth’s surface. Let z = r - R be the vertical distance that the external object is above the earth’s surface. Then
GMm[│
R+ z − │
R]
Vg(z) = ______
GMm
− ______
GMm = ________________
= ___________
2 GMm z
R
R+z
R(R + z)
R (1 + z/R)
(C8.10)
This expression is still exact. But if z << R (the object is much closer to the
earth’s surface than the earth’s radius, an excellent approximation in most
situations of daily interest!), then GM/[R2(1 + z/R)] ≈ GM/R2, a constant (the
same constant for all objects interacting with the earth). This constant’s value
happens to be 9.8 m/s2 (check this!), which is the earth’s gravitational field
strength │g
W│ defined in chapter C2. So in this situation, the potential energy
for the gravitational interaction between the earth and an external object is
GM z = m│g
Vg(z) ≈ m ____
W│z (when r0 = R or z0 = 0)
R2
A useful approximation for Vg
(C8.11)
Energy
GMm
R
0
a nice simple expression that you may have seen before. This is just an
approximation, but an excellent one that amounts to modeling a gently curving function in a limited region by a straight line (see figure C8.2). But we can
get to this nice simple expression only because we could choose our reference
separation r0 to be something different than our choice in equation C8.8.
Exercise C8X.1
At roughly what altitude z would the approximation in equation C8.11 be 1%
different than the exact expression in equation C8.10?
Vg(r) =
GMm - GMm
R
r
r
r=R
Vg(r)
z
z=0
Figure C8.2
A sufficiently tiny part of the gravitational potential energy function
looks like a straight line.
124
Chapter C8
Conservation of Energy
Negative energies
Note that if we choose the reference separation so that Vg = −GMm/r,
then a system’s gravitational potential energy is always negative. However,
if our system is the earth interacting with an object close to its surface and
we choose a reference separation so that Vg = GMm(1/R − 1/r) ≈ m│g
W│z,
the gravitational potential energy is positive if the object is above the earth’s
surface (and negative if below it). Therefore, our arbitrary choice of reference
separation can change the sign of the potential energy we assign to an interaction! Such a choice may even change the sign of the system’s total energy E
(depending on what total kinetic energy the system’s particles have). Kinetic
energies are always positive, but the signs of the potential and total energies
are therefore somewhat arbitrary. Here is what you should remember:
A negative potential energy V for an interaction means only that the
interaction between two particles holds less energy at the particles’
current separation than at their reference separation.
A negative total energy E means only that the system as a whole in its
current configuration has less energy than it would with all particles
at rest at their interactions’ reference separations.
C8.4
Fundamental Potential Energy Formulas
As we have seen, the general formula for the potential energy of the gravitational interaction between particles (and/or spheres) is:
The potential energy of the
gravitational interaction
reference separation:
m m2
Vg(r) = −G _____
1r
____________________
[ Vg(r) ≡ 0 when r = ∞ ]
Energy
0
r
Vg(r) = –G
m1 m2
r
Figure C8.3
A graph of the gravitational
potential energy between two
particles as a function of their
separation r.
A useful approximation for
objects near the earth
(C8.12)
• Purpose: This is the potential energy function Vg(r) for the gravitational
interaction between two particles or spherical objects whose masses
are m1 and m2 and that are separated by a (center-to-center) distance r.
G is the universal gravitational constant: G = 6.67 × 10-11 N·m2/kg2.
• Limitations: This equation technically applies only to particles and/or
spherical objects at rest. But it is an excellent approximation if the interacting objects’ speeds are small compared to that of light.
Figure C8.3 shows a graph of this potential energy function.
As discussed earlier, though, the following approximation may be more
useful for objects interacting gravitationally with the earth:
Vg(z) = m│g
W│z
reference separation:
____________________
[ Vg(z) = 0 when z = 0 ]
(C8.13)
• Purpose: This is the potential energy function Vg(z) for the gravitational interaction between the earth and a small object of mass m near
the earth’s surface, where z is the small object’s vertical position and
W│ = 9.8 m/s2 is the gravitational field strength at the earth’s surface.
│g
• Limitations: This is an approximation that is sound when all positions
z of interest (including the point where z = 0) are within ~50 km of the
earth’s surface, and the object’s speed is small compared to that of light.
C8.4 Fundamental Potential Energy Formulas
125
The electromagnetic interaction is another important fundamental
interaction. It acts between any two particles that have electrical charge.
Charge comes in two types that we call positive and negative and which are
represented in formulas by positive and negative numbers, respectively. The
SI unit of charge is the coulomb, where (for historical reasons) 1 C is the total
charge of about 6.242 × 1018 protons.
Even between elementary particles, an electromagnetic interaction can
be quite complicated, but we can usefully divide it into two parts, an “electrostatic part” and a “magnetic part.” The magnetic part becomes significant
only if the particles’ speeds approach the speed of light, and is strictly zero
if the particles are at rest. So the electrostatic part dominates at low particle
speeds, and in that limit, we empirically find its potential energy to be
( )
reference separation:
q1q2
____________________
Ve(r) = _____
1 ____
Ve(r) ≡ 0 when r = ∞
4πε0 r
(C8.14)
• Purpose: This is the potential energy function Ve(r) for the electrostatic
part of the electromagnetic interaction between two particles or uniformly charged spherical objects whose charges are q1 and q2 and that
are separated by a (center-to-center) distance r. We call the constant
1/4πε0 (which we write that way for historical reasons) the Coulomb
constant: 1/4πε0 = 8.99 × 109 N·m2/C2.
• Limitations: This equation strictly applies only to particles (or spherical objects) at rest, but is a good approximation as long as the particles’
speeds are small compared to the speed of light.
(We will discuss the energy implications of magnetic interactions in unit E.)
Figure C8.4 shows graphs of equation C8.14 when q1q2 > 0 (the particles’
charges have like signs) and when q1q2 < 0 (the particles’ charges have opposite
signs). In the first case, note that the interaction’s potential energy Ve decreases
as r increases, so (to conserve energy in an isolated system) the interacting
particles will speed up as they move away from each other, meaning that the
interaction is repelling the particles from each other. Conversely, if q1q2 < 0, Ve
increases with increasing r, so interacting particles in an isolated system must
speed up as they get closer together, meaning that the interaction is attracting
the particles to each other. So we see that like charges repel, and opposite charges
attract, something you may have known already.
Of the four fundamental interactions described by the Standard Model
(see appendix CA), only the gravitational and electromagnetic interactions
operate between particles separated by more than 10-15 meters, and so are the
only interactions that can operate between separated macroscopic objects.
Exercise C8X.2
In an effort to cut costs, imagine that NASA experiments with launching
capsules into space using a gigantic slingshot. In one of their experiments,
a small capsule is shot vertically upward and reaches a maximum altitude
(above the earth’s surface) of _ 12 R before falling back toward the earth.
(a) Explain why equation C8.13 is not appropriate for calculating Vg here.
(b) If we use equation C8.12, is the total energy E of the system consisting of
the earth and capsule positive or negative after the capsule is launched?
Features of the electromagnetic
interaction
The potential energy of the
electrostatic interaction
Energy
1 q1 q2
4πε0 r
(when q1 q2 > 0)
Ve(r) =
0
r
1 q1 q2
4πε0 r
(when q1 q2 < 0)
Ve(r) =
Figure C8.4
Graphs of the potential energy
functions for the electrostatic
interaction between charged particles with like and unlike signs.
126
Chapter C8
C8.5
Internal energy
The concept of power
Internal Energy and Power
The model described so far in this chapter is adequate for describing interactions between particles. But interacting macroscopic objects can also store
energy internally in “hidden” forms that are independent of those objects’
center-of-mass kinetic energies or the potential energies due to the objects’
separations. For example, all macroscopic objects contain thermal energy that
may become involved in an interaction.
We will explore such internal energies in future chapters. For now,
it is enough to know that a macroscopic object can contain an internal
energy U in addition to its kinetic energy K. In this chapter, we will focus
on situations where objects’ internal energies do not change significantly
and so can be ignored. Gravitational or electrostatic interactions between
macroscopic objects typically do not couple to those objects’ internal energies unless the objects are significantly and/or suddenly deformed by the
interaction.
Now, recall that force is the rate at which an interaction delivers impulse
(that is, transfers momentum) and torque is the rate at which an interaction
delivers twirl (that is, transfers angular momentum). The analogous concept for energy is power: the rate at which an interaction changes a particle’s
kinetic energy is the power P that the interaction delivers to that particle.
However, energy is different from momentum and angular momentum
not only because energy is an ordinary number instead of being a vector
(implying that power is also an ordinary number) but also because energy
can exist in a variety of forms (kinetic, potential, and various kinds of internal
energies). Therefore, physicists typically broaden the definition of “power”
to describe the rate of any kind of energy transfer across a system boundary,
even if it is not mediated by a macroscopic force-exerting interaction. We will
talk about this more in future chapters.
The standard SI unit of power is the watt, where 1 W ≡ 1 J/s. An older
unit is the horsepower, which we now define as follows: 1 hp ≡ 746 W. This
means that a 100-hp automobile engine is able to transform a “hidden” form
of energy in the car’s fuel (chemical energy) and transfer it across the engine’s
boundary to the rest of the car (in a form that can be converted to the car’s
kinetic energy) at a rate of 74,600 J/s.
C8.6
Hidden energy flows can make
determining isolation tricky
Conservation of Energy
Isolation
A system’s total energy is conserved only if the system is isolated, that is, if
no net energy flows across its boundary. In the case of momentum conservation, we called a system “isolated” if (1) it floats in space, (2) is functionally
isolated (it experiences no net momentum flow from external interactions),
or (3) involves a short-duration “collision.” These categories are still helpful
when considering conservation of energy, but with some complications.
These complications arise because in systems involving macroscopic
objects, energy can sometimes flow across a boundary in “hidden” forms
(for example, heat). Such flows may not involve significant net momentum
transfers, so a system can be functionally isolated with regard to momentum
flows but not with regard to energy flows. Even a system that floats in space
(such as a star) may not be isolated if it radiates a lot of heat.
Again, we will in this chapter consider only situations where such issues
do not arise. Systems of objects involving gravitational and/or long-range
electromagnetic interactions that are isolated with regard to momentum
flows are also almost always isolated with regard to energy flows.
C8.7 Solving Conservation-of-Energy Problems
C8.7
127
Solving Conservation-of-Energy Problems
This section will illustrate how we can use the information in this chapter
to solve basic conservation-of-energy problems. The task checklist for such
problems is mostly similar to the checklist for other conservation problems, but with two modifications. First, since energy is an ordinary number,
we rarely need to resolve vectors into components, so drawing coordinate
axes is often not necessary. Secondly, because internal interactions can in
­principle store energy and/or channel energy into internal energies, they
take on a significance in conservation-of-energy problems that they do not
have in conservation-of-momentum or conservation-of-angular-momentum
problems.
Therefore, a valuable part of one’s model in a conservation-of-energy
problem solution is a list of all the system’s significant internal interactions
and how you intend to handle each interaction in your model. In the context
of this chapter, “handling” an interaction means specifying what potential
energy function you will use to describe the interaction’s energy. For example, in the case of a gravitational interaction, you might say “Gravitational:
Vg(z) = m│g
W│z.” In the case of an electrostatic interaction, you might say:
“Electrostatic: Ve(r) = q1q2/(4πε0r).” Creating such a list prompts you to think
carefully about each internal interaction and its energy implications and efficiently communicates your thinking about those interactions to your reader.
Such lists will become even more important later.
If you ever use reference positions for potential energies that are not the
conventional positions listed in equations C8.12 through C8.14, be sure to
describe these carefully so your reader does not become confused.
So the conservation-of-energy problem checklist looks like this:
CoE-Specific Checklist
❒ Describe the system.
❒ Describe its external interactions.
❒ Describe how it is isolated.
❒ List its internal interactions
and state how to handle each.
❒ Draw “initial/final” diagrams.
❒ Describe nonstandard ref. positions.
General Checklist
❒ Define symbols.
❒ Draw a picture.
❒ Describe model and assumptions.
❒ Use a master equation.
❒ List knowns and unknowns.
❒ Do algebra symbolically.
❒ Track units. ❒ Check result.
The master equation for conservation of energy problems is simply Ef =
Ei, or in a bit more detail,
K1i + K2i + ⋯ + U1i + U2i + ⋯ + VAi + VBi + ⋯
= K1f + K2f + ⋯ + U1f + U2f + ⋯ + VAf + VBf + ⋯
(C8.15)
where Kni and Knf are the nth object’s initial and final kinetic energies, respectively, Uni and Unf are its initial and final internal energies, respectively, and
VAi and VAf are interaction A’s initial and final potential energies, VBi and VBf
are the same for interaction B, and so on. “Using a master equation” means
adapting the abstract form of the equation given above to the given situation.
In this chapter, we will assume that the interacting objects’ internal energies do not change. This means that all the Us on one side of the equation will
cancel those on the other.
The examples on the following page illustrate solutions that are consistent with the checklists described above.
Differences between momentum and energy checklists
List each interaction and how
you will handle it
Conservation-of-energy
problem checklist
Master equation for
­conservation-of-energy
problems
Chapter C8
128
Example C8.1
Conservation of Energy
Problem: Astronomers spot an asteroid that is currently several million kilometers from the earth (but about the same distance from the sun as the earth
is) moving at 12 km/s relative to the earth. When they predict the asteroid’s
future trajectory, they realize that the asteroid will pass within 120 km of the
earth’s surface, just grazing the outer atmosphere (whew!). What will be the
asteroid’s speed as it passes?
Solution Initial and final diagrams for this situation appear below:
Initial and final
diagrams
Initial:
asteroid
ri (not to
scale)
Final:
Knowns and unknowns:
Symbol
definitions
rf
List of internal interactions with potential
energy formulas
System description
How system is isolated, with justification
Discussion of how the
internal interaction
will be handled
More symbol
definitions
Approximations and
assumptions stated
Master
equation
vf
earth, mass M
vi
rf = 120 km + 6380 km
= 6500 km
ri ≈ “millions of km”
M = 6.0 × 1024 kg
m = ? |v f|= ?
G = 6.67 × 10–11 J·m/kg2
Internal interactions
• Gravitational:
Vg = –GMm/r
asteroid, mass m
The system here is the earth and the asteroid, which is isolated because it
floats in space. (Note that though the system is initially several million kilometers across, it is much farther than that from the sun, the most significant
source of external gravitation.) The only internal interaction is a gravitational
interaction between earth and the asteroid, which we will handle with the
universal gravitational interaction potential energy formula. This i­ nteraction
will not affect the internal energies of either the earth or asteroid, so their
internal energies Ue and Ua (respectively) remain fixed. Since the earth is
much more massive than even an asteroid, its kinetic energy K e in this process
will remain essentially zero. The master equation in this case then becomes
⏞
⏞
⏞
≈0
=0
≈0
GMm
_1
m│v
Wi│ + U
@a + K
ei+ Ue − ______
GMm
Wf│2 + U
@a + K
e+ Ue − ______
rf (C8.16)
ri = 2 m│v
_1
2
2
The problem only vaguely states the value of ri, but “several million kilometers” is on the order of 1000rf, so GMm/ri ≈ (GMm/rf)/1000. Thus, we can treat
GMm/ri ≈ 0 in comparison to GMm/rf, as indicated above. So, throwing away
the terms that are zero, nearly zero, or cancel out, we have
Algebra with
symbols
____________
_ 1 m│v
Wi│2 = _ 12 m│v
Wf│2 − ______
GMm
Wf│2 = │v
Wi│2 + _____
2GM
⇒ │v
Wf│ =
Wi│2 + _____
2GM
│v
2
r ⇒ │v
rf
f
rf
_______________________________________________________
Calculation includes
and tracks units
(
) (
)
(
)
@·m2 6.0 × 1024 kg
__________
1 kg
·m/s2
N
m2
____________
⇒ │v
Wf│ =
12,000 __
+ 2 6.67 × 10-11 _____
@
s
kg2 6,500,000 m
1 N
km
___
= 1.63 × 104 __
m
s = 16.3 s
(C8.17)
2
Final check of
plausibility
Note that the units of both terms in the square root end up being m /s2 (as
they must). The answer is also plausible (larger than the initial 12 km/s).
Note also that the asteroid’s unknown mass m cancels out without requiring
another equation to determine it. (For future reference, this is common in
problems involving gravitation.)
C8.7 Solving Conservation-of-Energy Problems
129
Problem: A deuterium nucleus consists of a proton bound to a neutron. If we
can get two such nuclei close enough together so they almost touch (about
1.5 fm = 1.5 × 10-15 m center-to-center), they can fuse to form a helium
nucleus. However, since they have the same positive charge, electrostatic
repulsion seeks to keep them apart. Suppose we fire two such nuclei directly
toward each other with the same initial speed │v
W0│. What minimum value
│
│
must v
W0 have (as a fraction of the speed of light) for the nuclei to fuse?
Solution Initial and final diagrams for this situation appear below:
Initial:
ri ≈ ∞
Nucleus,
charge q1,
mass m1
v1i
m
v2i
rf
Final:
Nucleus,
charge q2,
mass m2
m
│v
W1i│ = │v
W2i│ = │v
W0│ = ?
v1f = 0 v2f = 0
Internal interactions:
• Electrostatic:
q1q2
Ve(r) = _____
1 ____
4πε0 r
( )
│v
W1f│ = │v
W2f│ = 0
ri ≈ ∞, rf ≤ 1.5 fm
q1 = q2 = e ≡ +1.60 × 10-19 C
m1 = m2 = (1.67 + 1.68) × 10-27 kg
= 3.35 × 10-27 kg
The system here is the pair of nuclei. Let’s assume this whole process happens so quickly that we can consider it to be a “collision.” The nuclei interact
gravitationally as well as electrostatically, but the gravitational interaction
is negligible in comparison (see problem C8D.3). Note that even if we fire
the nuclei from only a few millimeters apart, ri is still enormously larger
than 1.5 fm, so we can consider ri ≈ ∞. The nuclei will reach their smallest
possible separation rf when the system’s energy is entirely potential, that is,
when v
W1f = v
W2f = 0. We will assume that the nuclei’s internal energies U1 and
U2 don’t change. The master equation for this situation therefore reads
⏞ ⏞
≈0
⏞
0
0
q1q2
q1q2
2
_ 1 m │v
@1 + _ 12 m2│v
W2i│2 + U2 + ______ = K
1f+ U
@1 + K
2f+ U2 + ______
1 W1i│ + U
2
4πε0ri
| |
2
2
2
e
e
v
W
⇒ 2( _12 m│v
W0│2) = ______ ⇒ __0 = _________
4πε0rf
c
4πε0mc2rf
| |
4πε0rf
(C8.18)
____________________________
_______
8.99 × 109 J·m
@/C2
v
W0
1.60 × 10-19 C
e _______
1 ≥ ______________
_
___________________________
⇒ __
=
c
c 4πε0mrf 3.00 × 108 m/s (3.35 × 10-27 kg)(1.5 × 10-15 m
@)
_______________
(
)
kg· m2/s2
J 1
___
= _____
0.023
__________
= 0.023
m/s kg
1J
(C8.19)
The result is unitless (as expected) and only 2.3% of the speed of light, so the
potential energy formula’s assumption that │v
W1,2│ << c is reasonably satisfied.
Exercise C8X.3
Add comments to the above solution (similar to those in the previous example) explaining how it satisfies the conservation-of-energy problem checklist.
Also see if you can find and fix a few subtle omissions.
Example C8.2
Chapter C8
130
Conservation of Energy
TWO-MINUTE PROBLEMS
C8T.1 Which has the larger kinetic energy, a 50-kg person
running at a speed of 2 m/s, or a 5-g nickel falling at a
speed of 200 m/s?
A. The running person
B. The falling nickel
C. Both have about the same kinetic energy.
C8T.2 A person throws three rocks off a cliff of height h
at exactly the same speed │v
Wi│, each time, but throwing
rock A almost vertically upward, rock B horizontally, and
rock C almost vertically downward (see the diagram below).
C8T.5 Consider a satellite (whose mass is m) orbiting
the earth (whose mass is M). If we use the formula Vg =
-GMm/r for the gravitational potential energy in this situation, the earth/satellite system’s total energy E turns out
to be negative. With respect to the total energy of what
situation is E negative?
A. The satellite at rest at the earth’s surface
B. The satellite at rest at the earth’s center
C. The satellite orbiting just above the earth’s surface
D. The satellite at rest at infinity
E. Some other situation (specify)
C8T.6 We cannot experimentally determine the actual
value of a system’s total energy. T or F?
A
Energy
C8T.7 Suppose the following graph shows the potential
energy function for a certain hypothetical interaction.
B
h
C
Which rock hits the ground with the greatest speed? (Ignore
air friction.)
A. Rock A
B. Rock B
C. Rock C
D. Rocks A and C hit with the same speed, faster than B.
E. All three rocks hit with the same speed.
C8T.3 Consider a rock interacting gravitationally with the
earth, and choose the interaction’s potential energy to be
zero if the rock is at the ground level. A person standing
at the bottom of a well throws the rock vertically upward
from 20 m below ground level. The rock makes it all the
way up to 1 m below ground level before falling back into
the well. The total energy of the rock–earth system is
A. negative.
B. zero.
C. positive (in this particular case).
D. positive (because energy is always positive).
E. The answer depends on information not specified.
C8T.4 A hydrogen atom consists of an electron (with negative charge) orbiting a proton (with positive charge). With
the conventional definition of the reference position for
electrostatic potential energy, the electrostatic potential
energy for this system
A. is positive.
B. is zero.
C. is negative.
D. depends on how fast the electron is moving.
V(r)
0
r
This interaction is
A. attractive for all r.
B. repulsive for all r.
C. attractive for small r, but repulsive for large r.
D. repulsive for small r, but attractive for large r.
E. impossible to characterize without more information.
C8T.8 Which of the lettered graphs below might also legitimately describe the potential energy for the same interaction
(between the same two particles!) whose potential energy
function is shown in the “original” graph in the upper left?
In each case, the vertical axis is energy (increasing upward)
and that axis crosses the horizontal axis where r = 0.
A
Original
0
r
0
V(r)
r
V(r)
D. A and B
E. All
F. None
C
B
V(r)
0
R
V(r)
r
0
r
C8T.9 A system of two noninteracting particles might have
a negative total energy E. T or F?
Homework Problems
131
HOMEWORK PROBLEMS
Basic Skills
C8B.1 Consider an object interacting gravitationally with
the earth. If we move the object from position A to position B, we find that the system’s gravitational potential
energy increases by 10 J. If we move it from position B to
position C, we find that the system’s gravitational potential
energy decreases by 5 J. If we take the system’s reference
separation to be when the object is at position B, what is the
system’s gravitational potential energy when the object is
at points A, B, and C?
C8B.2 Consider a 0.20-kg ball interacting gravitationally
with the earth. Suppose we define the z axis to be vertical,
define the ground level to be z = 0 and define this to be
the reference separation for the gravitational interaction.
Suppose someone at the bottom of a well throws the ball
upward and that when the ball leaves the person’s grasp
8.0 m below the ground, it has a speed of 6.0 m/s. What is
the system’s total energy at this time?
C8B.3 The driver of a car initially traveling at 55 mi/h
increases the car’s speed to 77 mi/h, which is 40% greater.
By what percentage has the car’s kinetic energy increased?
(Note that the severity of a crash is roughly proportional
to the kinetic energy that the colliding objects bring to it.)
C8B.4 Jump vertically as high as you can and measure
how far you have raised your center of mass at the top of
your trajectory. Then, use conservation of energy to estimate your initial speed as you left the ground.
C8B.5 Suppose you drop a ball from a certain height and
find its final speed is 20 m/s when it hits the ground. If
you throw the object vertically downward from the same
height with an initial speed of 20 m/s, will its final speed be
40 m/s? Carefully explain why or why not. (Ignore friction.)
C8B.6 Suppose you are throwing a ball to someone on a
rooftop above you, and you want the ball to be moving at
at least 5 m/s when it arrives. Will the initial speed with
which you need to throw the ball depend on whether you
throw it nearly vertically from directly below the person
or nearly horizontally from some distance away? Explain.
C8B.7 If a person wanting to dive from a seaside cliff
does not feel safe hitting the water while moving faster
than 20 m/s (44 mi/h), what is the maximum height from
which he or she should dive?
C8B.8 Suppose you are standing at the top of a cliff 45 m
high overlooking the ocean, and you throw a rock horizontally with a speed of 15 m/s. If we ignore air friction, what
is the rock’s speed when it hits the water?
C8B.9 Suppose we drop a rock from rest from a vertical
altitude of z = _14 R = 1595 km (where R is the earth’s ­radius)
and allow it to fall toward the earth. Our goal is to calculate the rock’s speed when it finally enters the earth’s
1
atmosphere at about z = __
100
R ≈ 64 km.
(a) Use equation C8.13 to find this speed in terms of the
earth’s mass M, its radius R, and the gravitational constant G. (Hint: Note that │g
W│ = GM/R2.)
(b) Use equation C8.12 to determine this speed more precisely. What is the fractional error in the first result?
C8B.10 Suppose an object is so massive that the earth’s
kinetic energy changes by an amount equal to one millionth of the amount that the object’s kinetic energy
changes when the two objects interact.
(a) What is the object’s mass?
(b) If rock has a density of 3000 kg/m3, how big would a
cube of rock have to be to have this mass?
C8B.11 Suppose that in deep space two particles with the
same mass m but opposite electrical charges q and -q are
initially a distance 4R apart and are moving directly toward
each other with the same speed │v
Wi│, such that the system’s
total energy E is zero. What are the particles’ speeds │v
Wf│ as
a multiple or fraction of │v
Wi│ when the particles’ separation
has decreased to R?
C8B.12 A power company ad once proclaimed “Energy—
not just a force. It’s power!” Carefully explain to the
ad writer the difference between these three technical terms.
Modeling
C8M.1 Suppose you accidentally drop a penny from the
observation deck on the 102nd floor of the Empire State
Building (the deck is 1245 ft = 380 m above the ground).
(a) Ignoring air friction, what will be the penny’s approximate speed when it hits the ground?
(b) If the observed speed is actually 60 m/s, what fraction
of the system’s change in potential energy was converted to internal energy in the air and/or the penny?
C8M.2 On October 14, 2012, Felix Baumgartner became the
first human being to break the sound barrier while falling
freely. He jumped from a capsule that was lofted by a balloon to an altitude of 127,852 ft (38.96 km). The speed of
sound at that altitude is 690 mi/h.
(a) Assuming that air friction is negligible at such altitudes, how far would he have to fall to reach the speed
of sound? (The gravitational potential energy formula
given in this chapter is accurate to better than 1% even
at such altitudes. Track units carefully, though!)
(b) Friction is not negligible even at this altitude. Baumgartner actually reached the speed of sound at an altitude
of 109,731 ft (33.45 km). What fraction of the system’s
change in gravitational energy was converted to internal energy (mostly thermal energy in the air) by the time
Baumgartner reached the speed of sound?
132
Chapter C8
Conservation of Energy
C8M.3 A small asteroid is moving at 15 km/s when it
passes the radius of the moon’s orbit (384,000 km from the
earth’s center). What is its speed when it hits the earth?
a constant angle of 17° below the horizontal, and that air
friction is negligible (probably a bad assumption), what is
the skier’s speed when he or she touches down on the hill?
C8M.4 On Thanksgiving Day in 2013, Comet ISON passed
only 1,860,000 km from the sun’s center (about 1.3 solar
diameters!). The intense heat and tidal forces it experienced during this passage broke it up, spoiling what was
hoped to be one of the brightest comet displays of the century. Assuming that Comet ISON fell toward the sun from
basically at rest at infinity, what was its speed at that point?
C8M.9 Suppose an unpowered spaceship is approaching a
binary star system whose stars each have mass M and are
separated by a distance 2R. The spaceship’s trajectory is set
to take it on a straight line through the midpoint between
the stars along a line perpendicular to their separation.
Assume M is much larger than the ship’s mass and that the
stars orbit in a plane perpendicular to the ship’s trajectory,
so that the distance from each star to the ship are always
equal to each other.
_______
(a) Show that
GM/R has units of speed.
(b) Suppose that when_______
the ship is 8R from each star, the
ship’s speed is _ 54 GM/R . What is the ship’s speed as
it passes _______
between the stars? Express this speed in the
form b GM/R
. (Hint: b will be the ratio of integers.)
_______
(c) Show that
GM/R is 40 km/s if M = 2.0 × 1030 kg
(about the sun’s mass) and R = 8.33 × 1010 m (a bit
more than half the distance between the earth and the
sun). Calculate the numerical value of the ship’s speed
as it passes midway between the stars.
C8M.5 On June 10, 1974, a baseball hit by Phillies player
Mike Schmidt hit a speaker suspended below the roof of
the Houston Astrodome. The speaker was 117 ft (36 m)
above the field and 329 ft (100 m) horizontally from home
plate. (The ball dropped into center field and was ruled a
single, even though it would almost certainly have been a
home run if it missed the speaker.) If the ball left Schmidt’s
bat traveling at 47 m/s, what was the ball’s speed when it
hit the speaker (ignoring air friction)?
C8M.6 You are trying to design a “rail gun” to launch canisters with mass m at a high speed │v
Wi│ on an initially
almost horizontal trajectory along the surface of the moon
(whose mass is M and radius is R). If │v
Wi│ is large enough,
the canisters will fly tangentially away from the moon into
deep space. You want the canisters to have a certain speed
Wf│ once they are very far from the moon.
│v
(a) What should │v
Wi│ be in terms of M, G, R, and │v
Wf│?
(b) Calculate the numerical value of │v
Wi│ for │v
Wf│ = 500 m/s,
given that the moon’s radius is 1740 km and its mass
is 7.36 × 1022 kg.
C8M.7 Imagine you are participating in a competition
where you have to shoot an arrow from a cliff so it goes
through a target that is a horizontal distance D away
from you and an angle θ below the horizontal. Suppose
that when you pull the bow as hard as you can, the arrow
leaves the bow traveling at a certain speed │v
Wi│, and that
you have found that at that initial speed you must aim at
an angle of ϕ below the horizontal to hit the target. Assume
air friction is minimal. The arrow must have a certain final
speed of │v
WT│ to penetrate the target, and you get no points
if it does not.
(a) Does the arrow’s final speed depend on its initial
velocity angle ϕ? Explain your reasoning.
(b) Find a symbolic expression for the arrow’s final speed
Wf│ at the target in terms of D, │g
W│, │v
Wi│, θ, and/or ϕ.
│v
(c) If D is 150 m, θ = 35°, ϕ = 10°, │v
Wi│ = 265 fps and │v
WT│ =
300 fps (fps = feet per second, a typical unit for arrow
speeds in the USA), will your arrow penetrate the
target?
C8M.8 During a jump on a K-195 ski-jump hill, the skier
may leave the ground traveling at about 25 m/s (with a
velocity direction actually slightly downward from horizontal) and subsequently land at a lower point on the hill
that is a distance of 195 m along the slope. Assuming that
the hill’s surface below the jump point is planar and makes
C8M.10 One way to measure nuclear radii is to determine
the initial speed that a proton fired at a nucleus must have
to be absorbed. Suppose you fire a proton directly at the
nucleus of a gold atom, which contains 79 protons and 118
neutrons. Since both the proton and the gold nucleus are
positively charged, they will repel each other electrostatically. What must the proton’s minimum initial speed (as
a fraction of the speed of light) be if it is to penetrate that
nucleus (whose radius is R ≈ 6 fm)?
(a) Give your answer symbolically in terms of R, the Coulomb constant 1/4πε0, the speed of light c, the charge
on the proton q, and the proton’s mass m.
(b) What is this fraction’s numerical value?
(Hints: What must the proton’s speed be at its point of
closest approach if the collision is head-on and it barely
touches the nucleus? Note also that the particles’ initial
separation will be essentially infinite compared to 6 fm.
Neutrons have no charge, so the charge of a gold nucleus
will be 79 times that of the proton. Finally, note that this
whole interaction will take only a tiny fraction of a second.)
C8M.11 Uranium nuclei are unstable and decay by emitting
a helium nucleus, which contains two protons and two
neutrons. Suppose the original nucleus has 92 protons and
146 neutrons before it emits the helium nucleus, and that
the helium nucleus has an unknown speed as it departs
from the surface of the remaining nucleus, which is spherical with a radius of about 7.4 fm. What is the helium nucleus’s minimum kinetic energy far from the emitting nucleus
and why is this the lower limit? (Note that neutrons have
no electrical charge. Ignore the emitting atom’s surrounding electrons.)
C8M.12 A hydrogen atom consists of a lightweight electron
orbiting a much more massive proton in a circular orbit
whose radius is R ≈ 0.053 nm = 5.3 × 10-11 m. The electron
Homework Problems
133
orbits with a constant speed │v
W0│. Experimentally, we find
that if we add at least 13.6 electron volts (eV) of energy
to this system, the electron is able to escape to essentially
infinite distance with nonzero kinetic energy. What is the
electron’s orbital speed as a fraction of the speed of light?
(Hint: See the inside front cover for the definition of the
electron volt, which is a more convenient energy unit than
the joule when dealing with atoms.)
C8M.13 Suppose that in an atomic physics experiment
we shoot an electron at a NaCl molecule. The chlorine
atom in this molecule essentially appropriates one of the
sodium atom’s electrons, making the chlorine negatively
charged and the sodium atom positively charged. As a
crude approximation, let’s model this molecule as a particle with positive charge q and a particle with negative
charge -q separated by a distance d. Suppose the electron
passes exactly midway between these particles. What is its
speed as it passes between these particles if its speed at
essentially infinite distance is │v
Wi│? (Hint: Very little calculation is necessary, and you don’t need to know the values
of d and q. All you really need to know is that the molecule
is very massive compared to an electron and that its two
atoms have charges of equal magnitude but opposite sign.
Think about it.)
a dθ
Shell with
mass M
r
a sin θ
Particle
with mass m
Strip
θ
R
R – acos θ
a cos θ
Figure C8.5
Symbol definitions for computing the potential energy for
the gravitational interaction between a thin uniform shell
and an external particle.
is 2πa sin θ, and its width is a dθ, so its area is 2πa2sin θ dθ.
Since the shell’s whole mass M is spread evenly over its
whole area 4πa2, the mass ms of the particles in the strip is
to M as the strip’s area is to the shell’s total area, implying
that the total mass of particles in the strip is
(
)
2
dθ M = ___
ms = ___________
2πa sin2θ
M sin θ dθ
2
4πa
(C8.21)
The portion of the total gravitational potential energy that
is due to particles in the strip interacting with the external
particle is, therefore,
Derivations
C8D.1 Consider an isolated system of two objects of mass
m1 and m2. The second object is initially at rest, but the first
has some arbitrary initial momentum p
W0. After the two
objects interact, the first ends up with a final momentum of
p
W1, and the second with a final momentum p
W2. Show that
the second object’s final kinetic energy K2 is related to the
first object’s initial and final kinetic energies K0 and K1 by
_____
m1
K2 = ___
(K
0 + K1 − 2 K0K1 cos θ)
m
2
(C8.20)
W 0 and p
W 1. This means that if
where θ is the angle between p
m2 >> m1, K2 will still be negligible compared to K0 and K1,
even though the first object was not initially at rest. [Hints:
Show that conservation of momentum implies that the
W 0, p
W 1, and p
W 2 must form a triangle. Use the law of
vectors p
cosines to relate the magnitudes of these vectors.]
C8D.2 (Requires integral calculus.) Theorem: The gravitational potential energy of a massive spherically symmetric object
interacting with a particle is exactly as if the spherical object’s
mass were concentrated to a particle at its center. We can prove
this very useful theorem as follows. First, consider a very
thin spherical shell of mass M and radius a. Let R be the distance between the shell’s center and the external particle
(which has mass m). To find the total potential energy of
the shell’s interaction with the external particle, we have
to sum the potential energy for the interaction between
each particle in the shell and the external particle. Consider the thin strip of shell shown in figure C8.5. If dθ is
small, all particles in this strip are essentially the same distance r from the external particle. The length of this strip
Gmsm
GMm sin
θ dθ
dV = −______
r
= − ____________
2r
(C8.22)
To find the total potential energy associated with the interaction between all particles in the shell with the point
object, we simply have to sum equation C8.22 over all
such strips, which amounts to integrating this expression
over θ. Note that we can use the Pythagorean theorem to
express r in terms of θ as follows:
r2 = a2 sin2 θ + (R − a cos θ)2
= a2 − 2aR cos θ + R2
(C8.23)
Verify this last expression, plug it into equation C8.22, and
integrate it from θ = 0 to θ = π. (I suggest a change of variables: try u ≡ a2 - 2aR cos θ + R2.) You should find that the
total potential energy for the interaction between the point
and the shell is V = −GMm/R, which is what it would be
if the shell’s mass M were concentrated at its center. Since
any spherically symmetric object can be constructed from
a nested series of such shells, this also proves the result for
an arbitrary spherically symmetric object.
Comments: Note that the proof applies approximately if
the external object is a very small object, because it applies
to each particle in that object, and all the particles are essentially the same distance R from the shell’s center. The same
result also applies to the electrostatic interaction, because
the gravitational and electrostatic potential energy has
the same mathematical form (simply substitute Q, q, and
1/4πε0 for M, m, and –G, respectively, in the proof above to
generate the proof for a uniformly charged shell).
Chapter C8
134
Conservation of Energy
C8D.3 Calculate the absolute value of the ratio between
the gravitational potential energy and the electrostatic
potential energy between two deuterium nuclei. Assume
that the reference position for both interactions is r0 = ∞.
(You should find that your answer is independent of how
far apart the nuclei are.)
C8D.4 Suppose that rocky planets generally have about
the same density ρ. How then does the value of │g
W│ on the
surface of a planet depend on ρ, the universal gravitational
constant G, and the planet’s radius R?
Rich-Context
C8R.1 You are prospecting for rare metals on a spherical asteroid composed mostly of iron (whose density ρ ≈
7800 kg/m3) and whose radius is R = 4.5 km. You have left
your spaceship in a circular orbit a distance h = 400 m above
the asteroid’s surface and gone down to the surface using
a jet pack. However, one of your exploratory explosions
knocks you back against a rock, ruining the pack. (This is
why you have a backup pack which is, of course, back up
in your ship.) Can you simply jump high enough to reach
your spaceship? (Hint: Consider problem C8B.4, and back
up any bold claims you might make about how high you
can jump on earth with solid experimental evidence.)
C8R.2 You are the captain of Federation ship Exfoliant,
which has been damaged in a Loofayan raid. Most of your
fusion drive fuel has been vented to space as the result
of hull breaches, so you have some modest maneuvering
ability, but little else. You are near a G2 star almost identical to the sun, whose angular diameter is 1.02° viewed
from your position. Your astronavigators tell you that the
Doppler shift of that star’s light indicates that you are
moving in the general direction of that star at a speed of
190 km/s. Your engineer says that if you can dive into the
star’s corona, she can fashion an electromagnetic scoop to
collect hydrogen fuel, but you will need a speed of at least
500 km/s for the scoop to become sufficiently efficient at
collecting hydrogen from the coronal atmosphere. Your
first officer suggests that simply falling toward the star
might give you enough speed, and also that you could jettison some damaged sections to reduce the ship’s mass by
half, so that the star’s gravity can accelerate you faster. Of
course, the ship’s computer is down, so you have to do the
calculating by hand.
(a) How closely must you pass by the star to have the necessary speed to scoop up gas from the corona?
(b) Assuming you have sufficiently good thermal shields,
is the engineer’s plan feasible?
(c) Will the first officer’s idea about jettisoning parts
help?
ANSWERS TO EXERCISES
C8X.1 The difference between equations C8.10 and C8.11
is the factor 1/(1 + z/R) in the exact formula, which will
be a bit smaller than 1. For the fractional error in equation
C8.11 to be greater than 0.01, we must have
[GMz/R2][1 − (1 + z/R)-1]
________________________
0.01 =
= 1 + __
z − 1 = __
z
R
R
[GMz/R2](1 + z/R)-1
⇒ z = 0.01R = 63.8 km
(C8.24)
So, the equation Vg ≈ m│g
W│z will be accurate to better than
1% for altitudes below this.
C8X.2 For the NASA slingshot situation:
(a) The maximum value of z in this situation is _12 R, which
means (as we saw in the previous exercise) that Vg calculated at the capsule’s highest point will be off by a
factor of 2. We had better use an exact formula.
(b) If we use equation C8.12 (with r0 = ∞), then since the
capsule’s speed at its highest point must be zero, the
system’s energy at that point is
GMm
2GM
E = _ 12 m· 02 − ______
= − _____
3R
_32 R
(C8.25)
where m is the capsule’s mass, M is the earth’s mass,
and G is the universal gravitational constant. Since
energy is conserved, this will be the capsule’s energy
at all points in its flight. This is clearly negative, which
simply says that the system has less energy than it
would need for the capsule to be at rest at infinity.
C8X.3 The next page shows the comments that I might
have added to the solution. The main omission is that
the solution failed to define a few symbols. Most importantly, the symbol m was not identified as being the
same as m1 and m2. Also, the symbols K1f and K2f used
in equation C8.18 were not defined. These errors have
been corrected (see the circled modifications) in the version on the next page. (Though probably not in this case,
undefined symbols can confuse readers and/or cause
writers to make errors. Discipline yourself to define all
symbols.)
Answers to Exercises
135
Problem: A deuterium nucleus consists of a proton bound to a neutron. If we
can get two such nuclei close enough together so they almost touch (about
1.5 fm = 1.5 × 10-15 m center-to-center), they can fuse to form a helium nucleus.
However, since they have the same positive charge, electrostatic repulsion
seeks to keep them apart. Suppose we fire two such nuclei directly toward
each other with the same initial speed │ vW0│. What minimum value must │ vW0│
have (as a fraction of the speed of light) for the nuclei to fuse?
Example C8.2
Solution Initial and final diagrams for this situation appear below:
Symbol
definitions
Initial:
Nucleus,
charge q1,
mass m1
ri ≈ ∞
v1i
m
v2i
rf
Final:
m
Nucleus,
charge q2,
mass m2
│v
W1i│ = │v
W2i│ = │v
W0│ = ?
│v
W1f│ =│v
W2f│ = 0
v1f = 0 v2f = 0
ri ≈ ∞, rf ≤ 1.5 fm
List of internal inter-19
actions and a poten- q1 = q2 = e ≡ +1.60 × 10 C
tial energy formula m1 = m2 ≡ m = (1.67 + 1.68) × 10-27 kg
for each interaction
= 3.75 × 10-27 kg
Internal interactions:
• Electrostatic:
q1q2
Ve(r) = _____
1 ____
4πε0 r
( )
Initial and final
diagrams
List of knowns
and unknowns
System description
The system here is the pair of nuclei. Let’s assume this whole process
happens so quickly that we can consider it to be a “collision.” The nuclei
interact gravitationally as well as electrostatically, but the gravitational interaction is negligible in comparison (see problem C8D.3). Note that even if
we fire the nuclei from only a few millimeters apart, ri is still enormously
larger than 1.5 fm, so we can consider ri ≈ ∞. The nuclei will reach their
smallest possible separation rf when the system’s energy is entirely potential,
that is when vW 1f = vW2f = 0, meaning that their final kinetic energies K1f and K2f
are zero. We will assume that the nuclei’s internal energies U1 and U2 don’t
change. The master equation for this situation therefore reads
⏞
⏞
qq
_____
≈0
_1
2
2
_ 1 m │ W
@1 + m2│ Wv2i│2 + U2 +
1 v1i│ + U
2
⏞
0
1 2
4πε0ri
0
| |
2
2
| |
(C8.18)
____________________________
_______
8.99 × 109 J·m
@-C2
v
W0
1.60 × 10-9 C
______________
⇒ __
_ ce _______
1 ≥
___________________________
8
-27
c =
4πε0mrf 3.00 × 10 m/s (3.75 × 10 kg)(1.5 × 10-15 m
@)
_______________
(
)
kg· m2/s2
J 1
___
= _____
0.023
__________
= 0.023
1J
m/s
kg
Approximations and
assumptions stated
More symbol
definitions
Master
equation
q1q2
4πε0rf
= K1f+ U
@1 + K2f+ U2 + _____
2
e
v
W
⇒ 2 (_ 12 m│ W
v0│2) = _____
e ⇒ __0 = _________
4πε0rf
c
4πε0mc2rf
How the system is isolated
(C8.19)
The result is unitless (as expected) and only 2.3% of the speed of light, so the
potential energy formula’s assumption that │v
W1,2│ << c is reasonably satisfied.
Algebra with
symbols
Calculation includes
and tracks units
Final check of
plausibility
C9
Potential Energy
Graphs
Chapter Overview
Section C9.1: Interactions Between Macroscopic Objects
The goals of this chapter are (1) to take some first steps toward understanding interactions between multiparticle objects more complicated than particles or spheres and
(2) to learn how to interpret potential energy graphs, an extraordinarily powerful tool
for understanding complicated interactions.
In principle, we can calculate the total potential energy for an electromagnetic
or gravitational interaction between two macroscopic objects by summing the potential energies for the interactions between all pairs of particles such that one particle
in the pair is in each object. This is usually impractical. Alternatively, one can use
the method described in chapter C8 to empirically measure the potential energy. But
this only gives meaningful total potential energy if the interactions do not involve the
­objects’ internal energies. Contact interactions typically do involve the objects’ i­ nternal
­energies, and so cannot be described using a simple potential energy function.
Section C9.2: Interactions Between Two Atoms
The interaction between two atoms is a useful example of a moderately complex electromagnetic interaction between multiparticle objects that we can still describe using
a potential energy function. This section discusses a simplified qualitative potential
energy function for such an interaction.
Section C9.3: One-Dimensional Potential Energy Diagrams
Energy
allowed regions
V(x)
E
x
0
turning points
forbidden regions
Figure C9.5
The forbidden regions, allowed
regions, and turning points for a
potential energy function given a
certain total energy E.
136
A potential energy diagram for an isolated two-object system is simply a graph of the
system’s total interaction potential energy V(r) versus the objects’ separation r. Such
a diagram is most useful when the interaction between the objects does not change
their internal energies. In this section, we also simplify things by considering only
systems where (1) the objects move in one dimension and (2) one is much more massive than the other. We can then consider the massive object to be essentially at rest,
and we can relate r to the other object’s position x along the x axis.
We represent the system’s conserved total energy E as a horizontal line on the
­potential energy diagram. The value of E (and thus the line’s vertical location) depends
on the system’s initial conditions (that is, its initial separation and kinetic energy). Once
E has been fixed, the light object’s kinetic energy K at any given x is K = E - V(x). Since K
cannot be negative, regions of the x axis where V(x) > E are forbidden r­egions, while
regions where E > V(x) are allowed regions. The points where E = V(x) are turning
points: the light object’s velocity reverses direction at such points to keep it from entering a forbidden region. See figure C9.5 for an illustration of these regions.
The force that the total interaction exerts on the light object has an x component
Fx = -dV/dx. Points along the x axis where the slope of V(x) is zero (implying that
Fx = 0) are equilibrium points where the light object experiences no force and so can
remain at rest (if E is such that K = 0 there). If such a point corresponds to a local minimum in the potential energy function, it is a stable equilibrium point; otherwise, it
is an unstable equilibrium point. If a light object initially at rest at an equilibrium
point is then perturbed slightly, it will remain close to a stable equilibrium point, but
will move with increasing speed away from an unstable equilibrium point.
The point is that one can learn an amazing number of things about how a system
will behave simply by looking at its potential energy diagram!
Section C9.4: Relaxing the Mass Limitation
When we have a system consisting of two objects with arbitrary masses m1 and m2 ≤ m1
(but otherwise subject to the restrictions stated earlier), we can, with the help of some
mathematical trickery, express the system’s total energy in the form
mm
E = _ 12μ│ W
v│2 + V(r) where μ ≡ _______
1 2 ≡ “reduced mass”
m1 + m2
(C9.6)
where v
W is the lighter object’s (radial) velocity relative to the other, and r is the objects’
separation. Therefore, we can model such a system as if the more massive object were
at rest (with zero kinetic energy) if we take the lighter object’s mass to be µ instead of
m2. This broadens the applicability of the techniques discussed in section C9.3.
Section C9.5: The Spring Approximation
This section argues that in a small region spanning the bottom of a local minimum of
almost any potential energy function, the potential energy function is approximately
Vs(x) ≈ _ 12 ks (x − x0)2 + C
(C9.7)
where x0 is the position of the local minimum, ks is a constant of proportionality
called the spring constant, and C is an overall constant we can choose at will. This is
called the spring approximation, because the internal energy of a spring with relaxed
length x0 that is stretched or compressed to length x is empirically given by the same
function. Therefore, a system that is oscillating about a local minimum in its potential
energy function behaves like a mass oscillating at the end of a spring. (This is not an
accident, because stretching or compressing a spring causes the spring’s atoms to
displace slightly away from local minima in their interactions with each other.)
If two macroscopic objects are connected by a physical spring whose mass is negligible compared to either object, we can model the spring as if it were not an object
in its own right but rather an interaction with the potential energy function given by
equation C9.7. We call this the ideal spring model.
Section C9.6: The Potential Energy “of an Object”
We often encounter situations in physics where a light object interacts with something more massive that is therefore essentially at rest. (The trick discussed in section
C9.4 allows us to model many systems this way.) In such cases, the system’s potential
energy depends only on the light object’s position. It is both natural and common in
such cases to talk of “the light object’s potential energy” at such-and-such a position,
as if the object owned the potential energy. While this is a bit misleading (because
the interaction between the objects is what really contains the potential energy), it is
a useful shorthand that physicists commonly use.
Section C9.7: An Example
This section presents a commented application of the ideal spring model.
137
138
Chapter C9
C9.1
Potential Energy Graphs
Interactions Between Macroscopic Objects
In chapter C8, we discussed the potential energy functions associated with
the gravitational and electrostatic interactions between particles and/or
­spherically symmetric macroscopic objects. The goal of this chapter is to
broaden our discussion to include other kinds of objects that are more complicated than elementary particles.
I mentioned in the last chapter that of the Standard Model’s four fundamental interactions, only the electromagnetic and gravitational interactions
have an effective range larger than an atomic nucleus, so all interactions
between objects larger than nuclei are ultimately electromagnetic and/or
gravitational. When two complex multiparticle objects interact electrostatically or gravitationally, we can in principle calculate a total potential energy
for their interaction by summing the potential energies of the interactions
between all pairs of particles. We count the potential energies of interactions
between particle pairs where both particles are in the same object (as well
as the kinetic energies of any motions of those particles relative to the object’s
center of mass) as part of the object’s internal energy. Only the interactions
between particle pairs where one particle is in each of the two objects contribute to the potential energy of the total interaction between the objects.
However, actually performing such a sum is usually quite impractical.
The alternative is to use equation C8.6 (repeated as equation C9.1 below) to
measure inter-object potential energies empirically: if the two objects have
initial center-of-mass kinetic energies K1i and K2i at an initial center-of-mass
separation of ri and evolve freely according to the interaction between them
to kinetic energies K1f and K2f at a final separation of rf, then
V(ri) − V(rf ) = K1f + K2f − K1i − K2i
Contact interactions require a
different approach
gives the difference between the inter-object potential energies at those two
separations. Please note, though, that this procedure only makes sense if
the potential energy thus calculated depends only on the initial and final
object separations, not on the objects’ velocities, histories, and/or trajectories
between those initial and final separations.
This is not usually a problem with simple electrostatic or gravitational
interactions between macroscopically separated objects, but is almost always
a problem with contact interactions. At the microscopic level, contact interactions between two macroscopic objects are the sum of billions of billions of
tiny electromagnetic interactions between atoms on the surfaces in contact.
Because these interactions are complicated and generally involve transfers
of kinetic and potential energy between atoms that we cannot observe at the
macroscopic level, we generally have to handle such interactions by keeping
track of their bulk effects on the interacting objects’ internal energies rather
than by tracking their potential energies. We will study how to do this in
­chapters C12 and C13.
C9.2
What is involved in an interaction between two atoms
(C9.1)
Interactions Between Two Atoms
In the meantime, there are some situations where we can usefully talk about
a potential energy between two multiparticle objects. One case is a gravitational or electrostatic interaction between spherically symmetric objects,
as we have seen in chapter C8. Another illustrative case that is a short way
along the road between elementary particles and macroscopic objects is
the interaction between two atoms. Each atom consists of many negatively
charged electrons in a cloud around a positively charged nucleus. As the
C9.3 One-Dimensional Potential Energy Diagrams
atoms approach, each electron in each atom interacts electrostatically with
every other electron in both atoms, as well as with the atoms’ nuclei, so there
are literally hundreds of separate electrostatic interactions involved. (There
are, of course, gravitational interactions between all these particles as well,
but these are utterly negligible in comparison to the electromagnetic interactions.) As the distance between the atoms decreases, each atom’s electron
cloud also deforms and shifts in response to the forces exerted by all those
interactions, changing the arrangement of electrons. Quantum mechanics
defines the shape of these arrangements and also channels energy back and
forth between the electrons’ electrostatic potential energies and their kinetic
energies. In this particular case, we can brush this complexity under the rug
and treat it as part of the interaction’s “effective” potential energy (because
how much energy is channeled to kinetic energy typically depends only on
the atoms’ separation). This effective potential energy can therefore be a
pretty complicated function of the separation between the atoms’ nuclei, but
one that we can determine through a combination of theoretical work and
empirical measurement.
The details of the potential energy function will depend on the types
of atoms involved, but the simplified graph in figure C9.1 illustrates some
basic features that many interatomic interactions share. We almost always
set the reference separation for such interactions at infinity, so the effective
potential energy typically goes to zero as r W ∞. As the atoms approach each
other from an initially large separation, the effective potential energy at first
begins to increase, because the atoms’ electron clouds repel each other and
behave like squishy balls that require some energy to deform. But for many
pairs of atoms, between a certain pair of separations r1 and r0, the net potential energy drops significantly, because the atoms’ electrons settle into new
arrangements having significantly lower potential energy. Finally, for separations less than r0 the nuclei get close enough to begin to repel each other significantly (and quantum mechanical effects cause the increasingly confined
electrons’ kinetic energies to increase), prompting the energy required to
push the atoms closer together to increase dramatically. These processes are
completely reversible: if we pull the atoms apart, the configuration changes
reverse themselves, and we can fully recover whatever energy we put in.
For different pairs of atoms, the positions r1 and r0 vary, and the relative
sizes of the “hill” at r1 and the “well” at r0 may vary in relative size (or one or
the other may be missing entirely). But this effective potential energy function at least qualitatively describes many interatomic interactions.
This “effective” potential energy function involves adding some internal electron kinetic energies to some genuine electrostatic potential energy
terms. This trick works (that is, the effective potential energy behaves like
a real potential energy) as long as those internal kinetic energies (like the
genuine potential energies) depend on the inter-nuclear separation alone.
C9.3
139
Typical features of an interatomic potential energy
Energy
V(r)
0
r0
0.2 nm r1 0.4 nm
Figure C9.1
A simplified potential energy
curve for the interaction between
two hypothetical atoms.
One-Dimensional Potential Energy Diagrams
A potential energy diagram is simply a graph of the potential energy V(r)
of an interaction between two isolated objects as a function of their separation r. As we will see, such a diagram is a powerful tool for quickly reading
the implications of conservation of energy for such a system.
We will begin our study of this tool by restricting our attention to isolated
systems where (1) the two objects are rigid and their internal energies do not
change, (2) the objects happen to move toward or away from each other along a
one-dimensional line (which we can define to be the x axis), and (3) one object
r
Restrictions on the systems
that we will handle
140
Chapter C9
Potential Energy Graphs
Earth, mass M
Energy
0
E
x
Ball,
mass m
Massive
atom
Energy
Example one-dimensional
­potential energy diagrams.
E
K
Reading the diagram in the
gravitational case
Reading the diagram in the
two-atom case
V(x) = (a)
x
x
0
Figure C9.2
Lighter
atom
GMm
x
(b)
K
x1
x2
x3
x
V(x)
is much more massive than the other (or is attached to something much more
massive). The latter constraint means (as we saw in chapters C4 and C8) we
can ignore both the motion and kinetic energy of the massive object and treat
it as if it remained at rest. The one-dimensional-motion constraint then implies
that the two objects’ separation r depends only on the lighter object’s position x, so we can consider the interaction’s potential energy to be a function
V(x) of x. The first constraint then implies that the system’s total energy is
simply E = K + V(x), where K is the lighter object’s kinetic energy.
Figure C9.2 displays potential energy graphs for some systems satisfying these constraints. Note that if an isolated system initially has some total
energy E, then conservation of energy implies that the system always has that
energy independent of the lighter object’s position x. Therefore, I have drawn
a horizontal line on each of the diagrams to represent one possible positionindependent value of E. Since E = K + V(x), the light object’s kinetic energy K
at any given position x is simply the difference E - V(x) between the system’s total energy and the interaction’s potential energy at that position. Both
­figures show that we can read K from the diagram for a given object position.
Let’s ponder more deeply the case shown in figure C9.2a, as this is a
­system with which you likely have some experience. We can read the qualitative features of the ball’s motion from its potential energy diagram as follows.
Suppose we pull (that is, lift) the ball away from the earth to an initial position x = xR and release it from rest. This sets the system’s total energy to be
E = V(xR), as shown in figure C9.3a. We know that when we release the ball,
the gravitational interaction exerts a force on the ball toward the earth, which
means the ball starts moving toward the left on the diagram. As it moves left,
the interaction’s potential energy V(x) decreases and the ball’s kinetic energy
K increases, so the ball speeds up (figure C9.3b). The ball’s speed is maximum
when it smacks into the earth’s surface at x = x0. ­Suppose the ball bounces
perfectly from the earth’s surface with no loss in kinetic energy. It will then
move toward the right, slowing down as it goes (see figure C9.3c), eventually
coming to rest at position xR, whereupon the cycle repeats (the ball falls back
toward the earth from xR, speeds up, bounces, slows down, and returns to xR)
until the system’s energy changes due to some kind of external interaction
(or the ball and/or the earth channel some of the system’s energy into one or
the other’s internal energy).
Now consider the two-atom system shown in figure C9.2b. Suppose we
pull the atoms apart to a separation of xR and then release them from rest. This
sets the system’s energy to E = V(xR) (see figure C9.4a). The lighter atom is
in a situation completely analogous to that of the ball released from rest near
the earth, so it should begin to move toward lower potential energy, picking
C9.3 One-Dimensional Potential Energy Diagrams
Ball
141
x
Earth
Energy
x
Energy
xR
0
E
x
K=0
V(x) = (a)
GMm
x
0
E
x
Energy
xR
x0
x
xR
x0
0
E
K
x
K
V(x) = -
(b)
GMm
x
V(x) = (c)
GMm
x
Figure C9.3
up speed as it moves toward the left (figure C9.4b). In this case, however, no
“bounce” is necessary: once the light atom has passed x0, the potential energy
begins to rise, so the atom slows down, a signal that the massive atom is
repelling it. When it reaches xL (figure C9.4c), its kinetic energy goes to zero,
meaning that the atom is at rest for a mathematical instant. But the massive
atom is still repelling the lighter atom, so the latter turns around and starts
moving away from xL in the direction of decreasing potential (to the right)
increasing in speed as it goes. It passes x0, and then moves with decreasing speed toward xR, coming instantaneously to rest there before beginning
the cycle again. Therefore, the light atom endlessly oscillates back and forth
between xR and xL until the system’s total energy changes due to some kind
of external interaction.
Various stages in the motion of a
ball falling toward the earth and
bouncing off it.
Exercise C9X.1
Now you try. Imagine that the light atom moves from a very large x toward
the massive atom with sufficient kinetic energy so that its total energy is E,
as shown in figure C9.2b. What do you think will happen to the light atom?
Note that the system’s total energy E is basically determined by initial
­conditions—that is, the light object’s initial position (which determines the
system’s initial potential energy) and its kinetic energy K at that position. For
example, if we pull the ball in figure C9.3 farther to the right initially, it will
set the value of E higher even though the the graph of V(x) remains the same.
A system’s total energy
is determined by initial
conditions
Figure C9.4
Various stages in the separation of
two interacting atoms.
Massive
atom
Energy
E
0
(a)
Lighter
atom
x
K=0
xR
V(x)
x
x
x
Energy
Energy
E
E
0
(b)
x0
K
xR
V(x)
x
0
(c)
xL
x0
xR
K=0
V(x)
x
142
Chapter C9
Forbidden regions, allowed
regions, and turning points
To summarize, we have seen that an object can move (in either direction)
with a kinetic energy K = E - V(x) through any point where V(x) < E. Since
an object’s kinetic energy K = _12 m│v
W│2 cannot be negative, the object cannot
move through regions where V(x) > E. We call these forbidden regions, and
regions where V(x) < E, allowed regions. The boundary between an allowed
region and a forbidden region is a point where E = V(x) and where the object
must instantaneously be at rest. In the cases we have considered so far, the
object still experiences a nonzero force at at such points, so its x-momentum px
(and thus its x-velocity vx) does not remain zero but rather changes direction
(vx changes its sign as it passes through zero) at such a point. We therefore call
such points turning points. These concepts are illustrated in figure C9.5.
How can we be sure that the light object feels a nonzero force at a turning
point? If V(x) increases toward the right (that is, its slope is positive), then the
light object slows down as it moves right (see figure C9.6a). The change in the
object’s x-momentum px is therefore negative, implying that the x component
Fx = dpx/dt of the total force acting on that object must be negative (meaning
that the force points to the left). On the other hand, if V(x) decreases toward
the right (that is, its slope is negative), the object speeds up as it moves right
(see figure C9.6b), so Fx = dpx/dt is positive (meaning that the total force points
to the right). Finally, if V(x) is constant (its slope is zero), the object’s speed is
constant (see figure C9.6c), so Fx = 0. In summary, Fx has the opposite sign to
the potential energy function’s slope dV/dx and is zero when dV/dx is zero.
Indeed, problem C9D.2 guides you through a proof that
Energy
allowed regions
V(x)
E
0
x
turning points
forbidden regions
Figure C9.5
The forbidden regions, allowed
regions, and turning points for a
potential energy function given a
certain total energy E.
Potential Energy Graphs
dV exactly.
Fx = − ___
dx
Force and the slope of V(x)
Therefore, if V(x) has a nonzero slope at a turning point, we can be sure that
the object experiences a nonzero force at that point and thus turns around as
its x-velocity vx passes through zero at that point.
On the other hand, at a point where Fx = -dV/dx = 0, the light object could
remain at rest (if we set the object initially at rest at that point, meaning that
we set E equal to V at that point). We call such a point an equilibrium point.
Now suppose that we set the light object at rest at a local maximum of V(x):
the system’s total energy will then be E = V(x) and (since dV/dx = 0 at the
maximum) the object will remain at rest there. However, if we even slightly
disturb it, the system’s energy will increase slightly and the object will move
away from the maximum in one direction or the other with increasing speed
(see figure C9.7). This is analogous to trying to place a ball on the top of a
Equilibrium points
Energy
Energy
E
Energy
E
E
K
K
V(x)
0
(C9.2)
K
V(x)
x
0
x
0
V(x)
Figure C9.6
(a) An object slows down as it moves to the right if the slope of V(x) is positive, indicating a total force toward the left.
(b) An object speeds up as it moves to the right if the slope of V(x) is negative, indicating a total force toward the right.
(c) An object’s speed remains constant if the slope of V(x) is zero, indicating zero total force.
x
C9.3 One-Dimensional Potential Energy Diagrams
Energy allowed region for E4
unstable equilibrium
E2
E1
0
E4
E3
K
V(x)
x
143
Figure C9.7
If we place the light object at the local maximum of this potential energy
function and set its energy to exactly E1, it will remain at rest, but if we
disturb its energy slightly to E2 by giving it a tiny velocity to the right, it will
move away with increasing speed to distant regions. However, if we place
the object at rest at the local minimum with energy E3, and then disturb it
slightly to energy E4, the object will oscillate within a narrow region close
to the minimum.
stable equilibrium point
larger sphere. While in principle we can balance the ball perfectly on the top
of the sphere, even the slightest disturbance causes the ball to roll away from
the balance point in some direction. A local maximum in V(x) is therefore an
unstable equilibrium point. On the other hand, suppose we set the light
object at rest at a local minimum of V(x). The system’s total energy will then
be E = V(x) and (since dV/dx = 0 at the minimum) the object remains at rest
there. If we slightly disturb the object now, giving the system a slightly larger
energy, the object will oscillate back and forth within a small region about the
local minimum (again, see figure C9.7), like a ball in the bottom of a bowl.
Since the object remains trapped within a small region about such a point, we
call a local minimum of V(x) a stable equilibrium point.
Note how many aspects of the light object’s motion we can determine
simply by looking at a potential energy diagram! We can locate possible
­stable and unstable equilibrium points, calculate the x component of the force
an object will experience at any point and (for a given system energy E) predict many qualitative features of the object’s motion. Potential energy diagrams are a very powerful tool for understanding a given situation!
Note also that these features depend only on the shape of the potential
energy function V(x) and the difference between E and V(x). If we add an overall constant to V(x) (and thus to E), any conclusions we might draw about the
light object’s motion (for example, the locations of forbidden and allowed
regions, turning points, stable and unstable equilibrium points; the value of
Fx at a given x, and so on) are unchanged (see figure C9.8). This is consistent
with the fact (discussed in chapter C8) that an interaction’s potential energy
(and thus the system’s total energy) is only defined up to an overall constant.
Among other things, this means that the sign of V(x) is ultimately irrelevant:
adding an arbitrary overall constant to V(x) can change the sign of V(x) at
any given point, but does not change the system’s physical behavior. For
example, note that V′(x) in figure C9.8 is positive everywhere and V(x) is
negative in some regions, but both functions imply exactly the same physical
behavior. The sign of V(x) at a particular x only tells us whether the potential energy at that separation is larger or smaller than that at our arbitrarily
­chosen reference separation.
Exercise C9X.2
Suppose the potential energy of the interaction between two atoms is as
shown in figure C9.9. What are the allowed and forbidden regions for the
­atoms if the system has the total energy E shown? Is there a stable equilibrium separation? An unstable equilibrium separation? (Feel free to draw
directly on the diagram.)
Summary of what we can read
from a PE diagram
Energy
V'(x)
E'
V(x)
E
x
0
Figure C9.8
Adding an overall constant C to
V(x), which changes V(x) to V ′(x) =
V(x) + C and E to E ′ = E + C,
does not change the locations
of turning points, forbidden or
­allowed regions, and so on.
Energy
0
V(x) → 0
as x → ∞
x
E
V(x)
Figure C9.9
A hypothetical potential energy
graph for the interaction between
two atoms.
144
Chapter C9
C9.4
A one-dimensional system
whose objects have arbitrary
masses
Potential Energy Graphs
Relaxing the Mass Limitation
One of our core assumptions in the last section was that one of the two interacting objects was so massive that we could assume it to be motionless. In
this section, we will learn a trick that allows us to use potential energy graphs
even with systems whose interacting objects have arbitrary masses.
Consider an isolated system of two objects that still (1) have unchanging
internal energies and (2) move in one dimension (the first two limitations
in the previous section) but that have arbitrary masses m1 and m2 (though
let’s choose the object numbers so that m2 ≤ m1). Let’s define our reference
frame so the x axis coincides with the line along which the objects move
and so x = 0 coincides with the system’s center of mass (see figure C9.10).
Since the velocity v
WCM of the system’s center of mass is zero in our reference
WCM is zero as well. So, if v1x and
frame, the system’s total momentum p
Wtot = M v
v2x are the x components of the objects’ velocities, then
0 = m1 v1x + m2 v2x
Definition of the x component
of the relative velocity
m2
⇒ v1x = − ___
m v2x
(C9.3)
1
Let us also define vx ≡ v2x – v1x: vx is thus the x component of velocity of
object 2 relative to object 1. Combining this with equation C9.3 yields
(
)
(
)
m1vx
⇒ v2x = _______
m1 + m2
m
m1 + m2
vx = v2x − v1x = 1 + ___
2 v2x = _______
v2x
m1
m1
(
)
m2 vx
m
m
m1
⇒ v1x = − ___2 v2x = − ___2 _______
vx = − _______
m1
m1 m1 + m2
m1 + m2
(C9.4a)
(C9.4b)
Now, the system’s total energy is
E = _ 12 m1 v 21x + _ 12 m2 v 22x + V(r)
(C9.5)
where V(r) is the (possibly complicated) total potential energy of the
interaction(s) between the objects. You can show that we can rewrite this as
The simplified energy equation
m1m2
where μ ≡ _______
and │v
W│ = │ vx│ m1 + m2
E = _ 12 μ│v
W│2 + V(r)
(C9.6)
Exercise C9X.3
Important! Verify that equation C9.6 follows from equations C9.5 and C9.4.
Implication: we can model this
system as if object 1 was at rest
Note that there is only one kinetic energy term in this equation, and it
involves only the speed │v
W│ of object 2 relative to object 1. Therefore, we can
model our one-dimensional two-object system as if object 1 were infinitely
massive (and thus at a fixed position with zero kinetic energy) and object 2
were a particle with mass µ moving at velocity v
W with respect to object 1,
with its motion alone being affected by the potential energy V(r). This means
that all of the ideas and techniques we discussed in section C9.3 can also be
applied to a system containing two objects of arbitrary mass as long as we
m1
CM
Figure C9.10
A two-object system where the
objects have arbitrary masses m1
and m2 ≤ m1.
v1 = -
m2
v
m1 2
0
r
v2
m2
x
C9.5 The Spring Approximation
145
remember to replace the lighter object’s actual mass m2 with the so-called
reduced mass µ when doing any quantitative calculations.
In an upper-level mechanics course, you will learn another mathematical
trick that allows one to extend this approach to two-object systems moving
in three dimensions. The point is that potential energy diagrams are a useful
technique for understanding any isolated two-object system.
C9.5
The Spring Approximation
In many cases, two-object systems can lose energy to their surroundings, and
so eventually settle into a separation where the system’s potential energy is
the lowest (that is, the separation x0 corresponding to a local minimum of the
system’s potential energy function). If the system is subsequently jostled, the
system’s separation will oscillate around that local minimum.
Now, the curve of nearly any potential energy function near a local minimum looks like an upward-facing parabola. Indeed, by appropriately choosing the constants ks and C, we can mathematically fit a parabola of the form
Vs(x) = _ 12 ks(x − x0)2 + C
(C9.7)
so that it very closely matches the real potential energy curve for a small
region of the x axis close to x0 (see figure C9.11). Problem C9D.5 discusses the
mathematics of this matching process.
We call equation C9.7 the spring approximation, because the same formula empirically describes the internal energy stored in a spring that has
been compressed or stretched from its relaxed length x0 to a length x. The
point is that almost any system undergoing small oscillations around a local
minimum of its potential energy function behaves not only qualitatively but
quantitatively as if it were an object oscillating at the end of a spring!
This means that understanding the behavior of objects connected to
springs illuminates an enormous range of physical phenomena! The spring
model is therefore one of the most important models in physics. We will spend an
entire chapter in unit N talking about the behavior of objects connected to
springs, and we will deploy this model in units Q and T to help us understand important systems. The spring model is a good first approximation in
almost any situation where the interaction between two objects tends to try
to maintain a specific separation r0 between them and deviations from r0 are
relatively small. Other examples include the interaction between the earth
and a pendulum bob, a person bouncing (lightly) on a trampoline, a boat
bobbing vertically in a body of water, and so on. If you continue in physics,
you will see this model appear again and again in the strangest places!
The real
V(x)
Energy
V(x)
1
2
x0
0.2 nm
C
Energy
r
C
x0
The same formula describes
the internal energy of a spring
The ubiquity of the spring
approximation
Figure C9.11
ks(x - x0)2 + C
0.4 nm
Matching a local minimum
with a parabola
x
By choosing appropriate values
for ks (which adjusts the parabola’s
width) and C (which adjusts its
vertical position), we can find a
­parabola V(x) = 1_2 ks (x - x0)2 + C
that very closely matches a local
minimum of almost any potential
energy function within a small
range around the x-position x0 of
the minimum.
146
Chapter C9
Potential Energy Graphs
Indeed, the reason that the spring approximation applies to real springs
is because when we deform the spring by compressing or extending it, we
are either pushing the spring’s atoms a bit closer together or pulling them a
bit farther apart than the ideal spacing that is defined by the local minimum
of their interatomic potential energy functions. As long as each atom moves
only slightly away from that minimum, the energy that each atom requires
increases as the square of its displacement from that minimum increases.
This means that the total internal energy that the atoms collectively require
goes up with the square of the displacement from the spring’s relaxed length.
Technically, we should call this energy part of the spring’s internal energy
(because it is being stored in microscopic interactions inside the spring). But
if the spring has a small mass compared to the objects it connects (so that we
can ignore the spring’s kinetic energy), then we can treat the spring as if it
were an interaction that stores a potential energy V(x) = _12 ks (x − x0)2 + C. We
will call this application of the spring approximation the ideal spring model.
It is an excellent approximation for most realistic springs as long as they are
not extended or compressed too severely.
C9.6
The Potential Energy “of an Object”
In many situations in physics, we have low-mass objects interacting with
objects that have either much larger masses or are attached to objects that
have much larger masses (such as the earth). We have also seen that even
when the objects have comparable masses, we can treat the more massive
object as if it were at rest and the other object as the only one moving.
In such cases, it is understandable (and common) to speak as if the object
owned the system’s potential energy, since only changes in that object’s position affect that energy. For example, one might casually say that “the ball’s
potential energy at height h is m│g
W│h” or “the atom’s potential energy at
0.2 nm is 2.0 × 10-20 J.”
Such a statement is not quite correct, since the potential energy belongs
to the internal interactions in the system, not to any object. This language
can therefore be quite misleading. Because I want to emphasize the concept
that potential energy belongs to interactions, I will avoid this language (at
least in this unit). However, I also want you to know that such expressions
are common in the physics literature. I hope you will learn to automatically
recognize such a phrase as being a casual ellipsis for a more correct (but longer) statement such as “the potential energy of the gravitational interaction
between the earth and the ball when the ball is at height h is m│g
W│h.”
C9.7
An Example
The checklist described in chapter C8 works for all conservation of energy
problems, but in situations where multiparticle objects interact, it is even more
important to describe how you are going to handle the interactions between
objects. The effective potential energy between multiparticle objects can be
almost anything, so you should describe that potential energy function (and
its reference separation) carefully if the problem statement does not.
The following example illustrates an application of the ideal spring
model. As usual, I have attached comments to the solution so you can see
how I have dealt with various items on the checklist.
C9.7 An Example
147
Problem: You are designing a back-up safety system for an elevator. If the
elevator cable breaks, it will fall onto a large spring at the bottom of the elevator shaft, which will decelerate the elevator safely. (A rachet at the bottom
will prevent the elevator from bouncing back up.) If the elevator has mass
m, falls from a maximum height h above the uncompressed spring and the
spring must not be compressed by more than a distance L, what must the
spring’s spring constant ks be?
Solution Initial and final diagrams for this situation appear below:
Initial:
elevator,
mass m,
Ki = 0
z
z=h
Final: z
List of internal
interactions
z=h
Internal interactions:
• Gravitational:
Vg(z) = m|g|z
• Ideal spring
Initial and final
diagrams
Vs(z) = 12 ksz2 for z < 0
Known: m, h, L,
Ki = 0, Kf = 0.
|g|= 9.8 m/s2
Symbol
definitions
z=0
spring,
spring
constant ks
z=0
Kf = 0
z = –L
Unknown: ks
=0
⏞
=0
Coordinate axes defined.
(This is not always necessary for conservation of
energy problems, but is
often helpful in situations
where objects interact gravitationally with the earth.)
List of knowns and
unknowns. Note that in
a problem that calls for a
purely symbolic response,
it helps to state which symbols are implicitly specified
in the problem statement,
and which we need to find.
System description
The system here is the earth and the elevator, which is isolated because it
floats in space. I am assuming that the spring has a small enough mass compared to the elevator that we can treat it as if it were an interaction between
the elevator and earth instead of being an object. If we define z = 0 to be
the position of the elevator’s bottom when the spring is uncompressed, and
choose this to be the reference position for Vs , then equation C9.7 reduces to
the simple formula above. Note that the spring contains no energy until the
elevator’s bottom reaches z = 0. Though we don’t have to choose the same reference position for the gravitational interaction, we might as well. Note that it
doesn’t matter that we are measuring against the elevator’s bottom instead of
its center of mass: because the elevator is rigid, if its bottom moves a certain
distance vertically, so will its center of mass. Note that the elevator presumably falls from rest when the cable breaks, so its initial kinetic energy Ki = 0,
and it will be at rest when the spring is maximally compressed, so Kf = 0. The
earth’s initial and final kinetic energies K ei and K ef will both be approximately
zero because the earth is so massive. We will also assume that the elevator’s
internal energy U and the earth’s internal energy Ue don’t change significantly. The conservation of energy master equation therefore becomes:
⏞
Example C9.1
⏞
=0
⏞
≈0
( )
2m│g
W│ __
h
⇒ ks = ______
+ 1
L
L
Approximations and
assumptions stated
More symbol
definitions
Master
equation
Ki + U
@ + K
ei+ Ue + m│g
W│h = K
f+ U
@ + K
ef+ Ue + m│g
W│ (−L) + _ 12 ksL2
⇒ m│g
W│(h + L) = _ 12 ksL2
How system is isolated, with justification
(C9.8)
Note that m│g
W│h has units of joules, so m│g
W│/L will have units of J/m2, which
1
2
_
is what the units of ks must be if 2 ksz is to have units of joules. Note also that
if we need the compression distance to be shorter, or the elevator’s mass or
fall height to be larger, the spring must be stiffer, so the formula makes sense.
Algebra with
symbols
Unit check
Plausibility check (note that
we can do this even when the
result is purely symbolic!)
Chapter C9
148
Potential Energy Graphs
TWO-MINUTE PROBLEMS
Energy
Energy (10–21 J)
15
V(r)
10
0
r
5
0
–5
Figure C9.12
Veff(r)
0.2
0.4
0.6
r
(nm)
–10
The potential energy diagram discussed in problems C9T.1
and C9T.2.
Figure C9.13
C9T.1 Figure C9.12 shows the potential energy function
for a certain interaction. This interaction is
A. Always attractive.
B. Always repulsive.
C. Attractive for small r, but repulsive for large r.
D. Repulsive for small r, but attractive for large r.
C9T.6 In the hypothetical atomic interaction shown in
­figure C9.13, assume that initially the atoms have zero
velocity at a separation of r = 0.2 nm. How will their separation subsequently evolve with time?
A. It will remain fixed at r = 0.2 nm.
B. It will oscillate between r = 0.2 nm and r = 0.06 nm.
C. It will decrease to about r = 0.06 nm, rebound, and
then increase to essentially infinite separation.
D. It will increase to essentially infinite separation.
E. Some other behavior (specify).
C9T.2 Figure C9.12 shows the potential energy function
for a certain interaction between two objects. As their separation r increases, the magnitude of the force each exerts
on the other (A) increases or (B) decreases.
C9T.3 In the hypothetical atomic interaction shown in
figure C9.13, the force between the atoms is attractive
­
within what ranges of the interatomic separation r?
A. For all r
B. For r < 0.06 nm and r > 0.2 nm
C. For 0.06 nm < r < 0.2 nm
D. For 0.12 nm < r < 0.25 nm
E. For r < 0.12 nm and r > 0.25 nm
C9T.4 In the hypothetical atomic interaction shown in
­figure C9.13, suppose the atoms initially are separated by
a very large distance but are approaching each other with
kinetic energy _ 12 μ│v
W│2 = 5 × 10-21 J. Roughly how close will
the atoms get to each other eventually?
A. r = 0
B. r = 0.05 nm
C. r = 0.2 nm
D. r = 0.4 nm
E. Other (specify)
C9T.5 In the hypothetical atomic interaction shown in
­figure C9.13, if the system had the appropriate total energy
and initial position, could the atoms’ separation remain
stable and constant?
A. No
B. Yes, at a separation of about 0.12 nm
C. Yes, at a separation of about 0.25 nm
D. Yes, at a separation of either about 0.12 nm or 0.25 nm
E. Yes, at some other separation(s) (specify)
The effective potential energy for a hypothetical two-atom
system. Veff(r) W ∞.
W 0 as r C9T.7 In the hypothetical atomic interaction shown in
figure C9.13, suppose that initially the system’s kinetic
energy is _ 12 μ│v
W│2 = 5 × 10-21 J at an initial separation of
0.1 nm. About how much energy would we have to add
to the system for the atoms to fly off to infinite separation?
A. 1 × 10-21 J
B. 6 × 10-21 J
C. 11 × 10-21 J
D. 16 × 10-21 J
E. None. The atoms will do so without adding energy.
C9T.8 In the hypothetical atomic interaction shown in
figure C9.13, assume that initially the atoms have a total
energy of 3 × 10-21 J at r = 0.1 nm. These atoms are
A. Unbound (they will separate to infinity).
B. Bound (they will not separate to infinity).
C. The answer depends on whether the atoms are initially
moving toward or away from each other.
C9T.9 In the hypothetical atomic interaction shown in
­figure C9.13, assume that the atoms initially have zero
radial velocity at a separation of 0.25 nm. If the atoms are
jostled slightly so that the system gains a slight amount of
energy, what happens to the atoms’ separation afterward?
A. It oscillates within a small region about r = 0.25 nm.
B. It oscillates between r = 0.25 nm and r = 0.05 nm.
C. It directly increases toward infinity.
D. It eventually increases toward infinity, maybe directly
but maybe after one detour to smaller separations.
E. Some other behavior (specify).
Homework Problems
149
HOMEWORK PROBLEMS
Energy (10 –21 J)
30
Veff(x)
20
10
0
–10
0.2
0.4
0.6
x
(nm)
–20
Figure C9.14
A (simplified) effective potential energy for a hypothetical
two-nucleus system.
Basic Skills
C9B.1 Figure C9.14 shows a simplified potential energy
“curve” for a hypothetical interaction between two atoms.
(This “curve” has been approximated by a sequence of
straight-line segments to make this problem easier.) Draw
a quantitatively accurate graph of the radial component Fx
of the force acting on the lighter atom as a function of x.
C9B.2 In the hypothetical atomic interaction shown in
figure C9.13, assume that the two-atom system has a total
energy of -5 × 10-21 J. Where are the turning points and
what are the allowed and forbidden regions in this case?
C9B.3 In the hypothetical atomic interaction shown
in figure C9.13, assume that the two-atom system has
a total energy of +5 × 10-21 J. Where are the turning
points and what are the allowed and forbidden regions
in this case?
C9B.7 In the hypothetical atomic interaction shown
in figure C9.13, assume that the two-atom system has
a kinetic energy of about 10 × 10-21 J when the atoms
have a very large separation and that the atoms’ separation is initially decreasing. About how much energy
would have to be removed (at the appropriate time) for
the atoms to form a “bond” (where the interaction keeps
them close together rather than allowing them to separate again to large r)?
C9B.8 In the hypothetical atomic interaction shown in
­figure C9.13, assume that the two-atom system has a kinetic
energy of about 10 × 10-21 J when the atoms are separated
by 0.1 nm. About how much energy would have to be supplied to the system for the atoms to move off to infinity?
C9B.9 Estimate the x component of the force that the interatomic potential energy shown in figure C9.13 exerts on
the lighter atom when the separation between atoms is
0.3 nm. Describe your reasoning.
C9B.10 A spring has a spring constant ks = 1000 J/m2. If its
relaxed length is 10 cm, and we stretch it to a length of
12 cm, how much additional energy does the spring store?
C9B.11 Suppose a certain spring’s relaxed length is 13 cm.
(a) If we must put 50 J of energy into the spring to compress it to a length of 11 cm, what is its spring constant?
(b) What additional energy will be required to compress
the spring to a length of 9 cm?
C9B.12 Suppose we launch a mug so it slides along a table.
We can certainly calculate the mug’s change in kinetic
energy in this situation.
(a) Explain why we cannot simply use equation C9.1
to compute the potential energy of the interaction
between the mug and the table.
C9B.4 In the hypothetical atomic interaction shown in­
(b) Where is the mug’s kinetic energy going if not to some
figure C9.13, assume that the two-atom system has a
form of potential energy?
kinetic energy of about 5 × 10-21 J when the atoms are
separated by 0.1 nm and that the atoms are initially moving apart. Describe the subsequent behavior of the atoms’ Modeling
separation r as completely as you can.
C9M.1 Estimate the approximate spring constant ks of the
C9B.5 In the hypothetical atomic interaction shown in
potential energy curve shown in figure C9.13 near that
­figure C9.13, assume that the two-atom system has a kinetic
curve’s local minimum. Describe your reasoning.
energy of about 2 × 10-21 J when the atoms are separated
by a very large distance and that the atoms’ separation is C9M.2 A planet’s escape speed │v
We│ is the minimum speed
initially decreasing. Describe the subsequent behavior of
an object must have at the planet’s surface to be able to
the atoms’ separation r as completely as you can.
coast to an essentially infinite distance from the planet.
(a) Use a potential energy graph to explain what miniC9B.6 In the hypothetical atomic interaction shown in­
mum total energy E the planet–object system must
figure C9.13, assume that the two-atom system has a kinetic
have for the object to escape.
energy of about 10 × 10-21 J when the atoms are separated
(b) Find a symbolic expression for │v
We│ in terms of G, the
by a very large distance and that the atoms’ separation is
planet’s mass M, and its radius R.
initially decreasing. Describe the subsequent behavior of
(c) Check that the units of your expression make sense.
the atoms’ separation r as completely as you can.
(d) What is the earth’s escape speed?
Chapter C9
150
Potential Energy Graphs
C9M.3 Suppose a particle with charge q is confined to the
x axis but moves completely freely along that axis. It interacts electrostatically with two charged particles (with the
same charge q) anchored to positions y = ±L, respectively,
along the y axis.
(a) Find an expression for the system’s potential energy
V(x) as a function of L, the Coulomb constant 1/4πε0,
q, and the sliding object’s position x.
(b) Find any equilibrium point or points for this V(x), and
specify whether each is stable or unstable.
C9M.4 Imagine a binary star system having two stars with
equal mass M, and suppose that these stars follow concentric circular orbits of radius R around the system’s center
of mass (which is midway between the two stars as shown
below), each orbiting once in a time T.
CM
C9M.9 Suppose we hold two air-track gliders (with masses
of 0.25 kg and 0.50 kg) together so they compress a spring
with a spring constant of 100 J/m2 by a distance of 2.0 cm.
The spring is not connected to either glider, so when we
release the gliders, the spring falls away. What is the gliders’ final speed relative to each other? (Hint: The fastest
solution method does not explicitly require using conservation of momentum, though that also works.)
Derivations
R
Star
C9M.8 Suppose a 20,000-kg jet lands on the surface of an
aircraft carrier. As it lands, it engages a tailhook wire, a
wire which behaves as if it were connected to a spring
with a spring constant of ks = 25,000 J/m2. This slows the
jet down to rest within 60 m. What was the jet’s landing
speed? (Actual tailhooks use hydraulics instead of a spring
to absorb the jet’s energy, but let’s pretend.)
Star
(a) Calculate this system’s total energy E assuming that
the system’s center of mass is at rest. Express your
result in terms of M, R, G, and T.
(b) An observer on one star would consider that star to be
at rest, and would see the other star orbit once around
it in time T in a circle of radius 2R. Show that if we
view the situation from this perspective, then equation
C9.6 correctly gives the same system energy.
C9M.5 Suppose an interaction between two objects has a
potential energy of V(r) = -b/r 2, where b is some positive
constant. Assuming the objects move in one dimension,
sketch a graph of V(r) for this system and qualitatively
describe the types of radial motions that might occur in
such a system.
C9M.6 Consider two quarks with masses m1 and m2. The
potential energy of the strong nuclear interaction between
two quarks is roughly V(r) = br, where b is a constant.
(a) Draw a qualitative sketch of V(r) for this system
assuming that the quarks move in one dimension.
(b) Describe the possible types of motion for this system.
(c) Can the quarks ever have enough energy to be free of
each other (that is, to move to infinite separation)?
C9M.7 Suppose a bungee jumper of mass m leaps from a
bridge over a deep canyon. The jumper has a low-mass
bungee cord with relaxed length L0 tied to her feet that
when stretched behaves like a spring with spring constant
ks. But this flexible cord does not begin to stretch until the
jumper has fallen through the distance L0. What is the
maximum distance below the bridge that the jumper will
reach, in terms of m, ks, L0, and │g
W│? (Hint: Set z = 0 to be
where the cord begins to stretch. You will have to solve a
quadratic equation. One of that equation’s two solutions
will be absurd. Which solution is the right one and why?)
C9D.1 Consider the gravitational interaction between two
arbitrarily shaped objects that are small compared to their
separation r. Can we model these objects as particles in this
situation? The total gravitational potential energy for all
the inter-particle interactions between the two objects is
mimj
V(r) = ∑∑ − G ____
rij
i j
(C9.9)
where mi is the mass of the ith elementary particle in
object 1, mj is the mass of the jth elementary particle in
object 2, and rij is the separation of these two particles. But
if both object’s sizes are very small compared to their separation r, then rij ≈ r for every pair of particles in this sum.
Use this to argue that equation C9.9 reduces to -Gm1m2/r,
where m1 and m2 are the total masses of the two objects.
C9D.2 (Requires calculus.) A pair of otherwise free objects
with masses M and m moving in one dimension participate in a single interaction with potential energy V(x).
Assume M >> m. Conservation of energy then implies that
p 2x
E = _ 12 mv 2x + V(x) = ___
+ V(x)
2m
(C9.10)
where vx, and px = mvx are the lighter object’s velocity x
component and momentum x component, respectively.
(a) Take the time derivative of both sides of this equation
to show that
dpx
dV
___ vx = − ___
dt
dt
(C9.11)
(b) According to the chain rule, dV/dt = (dV/dx)(dx/dt). Use
this to show that
dpx
dV
___ = − ___
dx
dt
(C9.12)
Since the interaction characterized by V(x) is the only
interaction contributing to the light object’s actual
momentum, the x component of the force exerted by
that interaction is Fx ≡ [dpx]V/dt = dpx/dt. Therefore, the
x-force exerted by the interaction must be Fx = -dV/dx.
Homework Problems
151
C9D.4 Prove that if m1 ≥ m2, then the smallest value the
reduced mass µ can have is _ 12 m2 (when m1 = m2) and the
largest it can have is m2 (in the limit that m1 >> m2).
C9D.5 (Requires knowledge of Taylor-series ­expansions.)
One can use a Taylor-series expansion to see why the
spring approximation is a good match to almost any
potential energy function V(x) near a local minimum. Consider an otherwise arbitrary potential energy function V(x)
whose derivatives are defined to all orders and that has a
true local minimum (meaning it has a zero first derivative
but a positive nonzero second derivative) at x = x0.
(a) Write out a Taylor expansion for the function V(x)
around the point x = x0.
(b) Argue that at a local minimum, the second term of the
series is automatically zero.
(c) Argue that the third term is almost always nonzero.
(d) Argue that the fourth and subsequent terms in the
expansion will be small compared to the third when
x - x0 is sufficiently small (assuming the various higherorder derivatives of V have comparable values.)
(e) Under these conditions, then, V(x) is well approximated
by the first and third terms alone in the expansion. Argue
that this term has the form V(x) = _ 12 ks(x − x0)2 + C, and
explain how ks and C are linked to the first and third
terms of the Taylor-series expansion.
C9D.6 An object of mass m hangs vertically from the end
of a spring with spring constant ks. For simplicity, let z = 0
be the object’s vertical position when the spring is relaxed.
(a) Write the total potential energy function V(z) for the
combined effect of gravitation and the spring as a function of the hanging mass’s vertical position z.
(b) Show that we can write this in the form
V(z) = _ 12 ks(z − z0)2 + C
(C9.13)
and determine z0 in terms of ks, m, and │g
W│. (This means
that this system behaves just as it would with no gravity, except that gravity shifts the equilibrium position.)
(c) At what vertical position might the object hang at rest?
on the initial rate of expansion of the universe at the Big
Bang. This equation is identical in form to a conservation
of energy equation: if we think of a as being analogous to
a position, then _12 (da/dt)2 would be analogous to the kinetic
energy of a unit-mass object, the constant K would be analogous to a total energy, and
B − Wa2
V(a) ≡ − __
a
C9R.2 In an upper-level mechanics course, you will learn
how to define an effective potential energy for two interacting objects (one very massive) moving in three dimensions that treats the kinetic energy of the nonradial aspect
of the lighter object’s motion as part of the system’s potential energy. We can thus model the object’s radial motion
as if it were a particle moving in one dimension subject to
some purely r-dependent potential energy function.
Given this, general relativity predicts that the effective
potential energy for an object with mass m moving with
(conserved) angular momentum L ≡ │L
W│ near a black hole
of mass M located at r = 0 is as follows (when M >> m):
2
GMm
L2 − ______
Veff (r) = − ______
+ _____
GML
2
2 3
2mr
mc r
r
C9R.1 General relativity implies that the equation of
motion for the universe can be written as follows:
( )
2
B − Wa2 = K
1 ___
__
da − __
2 dt
a
(C9.14)
where a represents the “size” of the universe at time t (as a
fraction or multiple of its present size), B is a constant that
depends on the present density of matter in the universe,
W is a constant that depends on the present density of
the so-called “vacuum energy” in the universe, and K is a
constant (which can be positive or negative) that depends
(C9.16)
Here is a qualitative graph of this function:
L2
2mr2
Vmax
Veff (r)
r0
0
r
Vmin
-
Rich-Context
(C9.15)
would be analogous to a potential energy.
(a) Draw a qualitative graph of V(a). [Hint: Sketch the
curves that represent the functions −B/a and −Wa2
and then draw a curve representing their sum.]
(b) Assuming that the universe had scale a ≈ 0 (that is, it
was infinitesimally small compared to its present size)
at the Big Bang and subsequently expanded, read from
the graph the possible qualitatively distinct fates of the
universe, and describe these behaviors. (Note that the
value of K depends on the universe’s “initial conditions,” which we do not know a priori.)
Energy
C9D.3 (Requires calculus.) Suppose an object is moving in
one dimension subject to an interaction whose potential
energy function is V(x) ≈ _ 12 ks x2 + C. What is the x component of the force acting on the object at position x?
GML2
mc2r3
GMm
r
(a) What kinds of qualitative radial motions are possible
for this object? Specifically, for what system energies E
would the small object’s radial distance from the black
hole (1) maintain a fixed value, (2) oscillate between
two values, (3) come in from infinity and then go back
out to infinity, and (4) be absorbed by the black hole at
r = 0? Specify if any of these cases are impossible.
(b) The analogous expression for Newton’s theory of
gravity is the same except that it lacks the final term.
Repeat your analysis for the Newtonian case. (Hint:
First sketch the graph of Veff(r) for that case.)
Chapter C9
152
Potential Energy Graphs
C9R.3 Consider an unpowered roller-coaster car of mass m
running along a frictionless roller-coaster track that lies in
the xz plane (with the x axis horizontal and the z axis vertical). Since the gravitational potential energy of the e­ arth–
car system is m│g
W│z, a graph of V(x) = m│g
W│ z(x), where
z(x) is the height of the roller-coaster track at horizontal
position x, shows the potential energy of the earth–car system as a function of the car’s horizontal position x.
One might be tempted to use such a system as an
analogy for an object of mass m moving in one dimension subject to the same potential energy function V(x).
In what ways is this a good analogy? In what ways is it
misleading? (Hints: Compare turning points, allowed and
forbidden regions, stable and unstable equilibrium points,
kinetic energy, and forces in the two cases.)
C9R.4 Suppose you are on an airless spherical asteroid and
you use a large spring gun to launch packets of valuable
metals of identical mass toward your company’s central
shipping base on another asteroid a considerable distance
away (each packet has a beacon so that people on the base
can track and retrieve it). Suppose you find that if you compress the spring by a distance D0 when you fire the packet,
the packet leaves the end of the gun with a speed │v
W0│
that is just barely sufficient to get the packet arbitrarily far
from the asteroid. How far do you need to compress the
spring to give the packet a final speed of │v
W│ far from the
asteroid? Express your answer in terms of │v
W0│, │v
W│, and D0.
C9R.5 Four identical balls of mass M and radius R are connected by strings in a square arrangement whose side has
length L. Between each adjacent ball there is a spring that
has a relaxed length 2L and a spring constant ks that is compressed by the string tying the balls together. The diagram
below shows the situation.
R
Ball,
mass M
Springs
String
L
(The springs are not attached to the balls, they are s­ imply
compressed between them.) The entire system floats in
space. Now suppose that we cut the strings simultaneously. The springs will push the balls away from each
other. What final speed will each ball have? (Hint: Will the
balls have the same final speed? Justify your response.)
ANSWERS TO EXERCISES
C9X.1 The light atom will move in toward x3, slowing
down as it approaches. At x3, by analogy to the other cases,
it will come instantaneously to rest, but because it is still
being repelled, it will then begin to move back out toward
infinite separation with increasing speed.
C9X.2
0
E
x3
allowed
V(x)
The calculation goes like this:
(
)
(
)
m m (m + m2) 2
m1 m 22 + m2 m 21 2
= __
1 ___________
v x + V(r) = __
1____________
1 2 1
v x + V(r)
2 (m1 + m2)2
2 (m1 + m2)2
forbidden regions
x1 x2
C9X.3
m2 vx 2 _1
m1 vx 2
E = _ 12m1 _______
+ 2m2 _______
+ V(r)
m1 + m2
m1 + m2
Here is the marked-up diagram:
Energy
The forbidden regions are 0 ≤ x < x1 and x > x3, and one
allowed region between x1 and x3. There is one stable equilibrium point at separation x2.
x
m1 m2 2
= __
1 _______
v x + V(r) ≡ __
1 μ v 2x + V(r)
2 m1 + m2
2
(C9.17)
We see that the latter is the same as equation C9.6 if we
identify │vW│ = │ vx│.
C10 Work
Chapter Overview
Introduction
In this chapter, we explore what external interactions that exert forces on a system do
to that system’s energy, comparing and contrasting what conservation of momentum
requires to what conservation of energy requires. We will learn from this discussion
how to handle frictionless contact interactions in conservation-of-energy problems.
This chapter also lays essential groundwork for future chapters.
Section C10.1: The Momentum Requirement
In this section, we see that conservation of momentum, the definition of force, and the
definition of a system’s center of mass require that when external interactions exerting forces act on a system, the change in the system’s center-of-mass kinetic energy is
dKCM = │F
Wext││d r WCM│cos θ
(C10.4)
where F
Wext is the net external force on the system, d r WCM is a tiny displacement of the system’s center of mass, and θ is the least angle between F
Wext and d r WCM. The displacement
W
must be small enough so that F
ext ≈ constant during the displacement.
Section C10.2: The Dot Product
We can express this relationship more compactly using the dot product:
W · w
W
u
≡ │u
W││w
W│cos θ
(C10.5)
• Purpose: This equation defines the dot product between two vectors u
W and w
W,
W
where θ is the least angle between the directions of u
W and w
.
• Limitations: This is a definition and so is exact.
• Note: The cross product yields a number with units that are the product of the
W
units of u
W and w
(which need not be the same).
The dot product has the following convenient properties:
W · w
u
W = w
W · u
W
(the dot product is commutative)
(C10.6a)
W · (w
W + s
u
W) = u
W · w
W + u
W · s
W
(the dot product is distributive)
(C10.6b)
W · (b w
W) = b(u
W · w
u
W)
(the dot product is linear)
(C10.6c)
W · u
u
W =│u
W│ 2
W · w
W ⊥ w
u
W = 0 ⇔
u
W
(assuming│u
W│ ≠ 0 and │w
W│ ≠ 0)
(C10.6d)
(C10.6e)
W
The dot product of u
W and w
in terms of those vectors’ components is as follows:
W · w
u
W = ux wx + uy wy + uz wz
(C10.7)
Using the dot product, the momentum requirement (equation C10.4) becomes:
154
W
dKCM = F
ext · d rWC M
(C10.8)
• Purpose: This equation describes how external interactions that exert a total
W
external force F
ext on a system as its center of mass moves through a tiny displacement d r WCM affect the system’s center-of-mass kinetic energy KCM ≡ _12 M │v
WCM│2,
where M is the system’s total mass and v
WCM is the velocity of its center of mass.
W
• Limitations: The process must have a short enough duration dt so that (1) F
ext dt
is small compared to the system’s total momentum and (2) the forces that we
W
add to get F
ext are each constant during dt.
• Notes: This momentum requirement expresses what conservation of m
­ omentum
requires regarding energy transfers.
Section C10.3: The Definition of Work
We define work W to be “energy that crosses a system boundary due to an external
interaction that exerts a force on the system during a process.” The section argues that
Wi · d rWi
W = ∑dWi = ∑ F
W
If F
is constant
⇒
W
W = F
· ΔrW
(C10.12a)
(C10.12b)
• Purpose: This equation describes the work W done by an external interaction
that exerts a force during a process where the point or region on which the force
acts moves a certain distance.
W
• Notes: If F
is a constant vector during the process, then equation C10.12b
applies, where ΔrWis the total displacement of the point or region on which the
force acts. If the force changes in magnitude or direction during the process,
W
then we must divide the process into tiny steps and sum F
i · d rW i over all steps,
W
where F
i is the force that acts during the ith step and d rW i is the infinitesimal displacement of the point or region on which the force acts during that step.
W
• Limitations: In the latter case, the steps must be small enough that F
i is approximately constant during each step. In both cases, these expressions need careful
reinterpretation when the affected particles are moving at speeds comparable
to that of light.
Positive work means that energy flows into the system; negative work means that
energy flows out. Work is to energy what impulse is to momentum and twirl is to
angular momentum.
Section C10.4: Long-Range Interactions
This section uses the momentum requirement and the definition of work to explain
why long-range interactions rarely affect a system’s internal energy.
Section C10.5: Contact Interactions
The definition of work and the momentum requirement also together explain why
any interaction that exerts a force that is always perpendicular to an object’s motion
affects neither the object’s internal energy nor its kinetic energy. Such an interaction
can be ignored in a conservation-of-energy problem.
Such forces include the normal (perpendicular) part (as opposed to the friction
part) of a contact interaction between solid surfaces, the lift part (as opposed to the
drag part) of the interaction between air and a solid object, and the tension interaction
between an inextensible string and an object swinging at its end. We can handle such
an internal interaction in a conservation-of-energy problem solution by writing “⊥”
next to its name in the interaction list and ignoring it in the master equation.
155
Chapter C10
156
C10.1
Derivation of the momentum
requirement
dp sinθ
Work
The Momentum Requirement
The goal of this chapter is to develop some ideas that we need to better apply
energy concepts to macroscopic systems (especially deformable systems such
as elastic balls or human bodies) and how forces applied to such systems
affect the energy they contain. We will begin by examining a useful consequence of conservation of momentum and the definition of force.
Suppose we have a system whose total momentum at a certain instant is p
W.
During a very brief subsequent time interval dt, suppose the system particiW ′ = p
W + d p
W.
pates in interactions that change the system’s total momentum to p
Figure C10.1 and the law of cosines then implies that
W│cos θ +│ d p
W│2
│p
W′│2 =│p
W│2 + 2│p
W││ d p
θ
dp
dp cosθ
p
p
(C10.1)
W. (If you are not familiar with the law of
where θ is the angle between p
W and d p
cosines, you can prove equation C10.1 fairly easily: see problem C10D.1.) If
W│ << │p
dt is sufficiently small, │ d p
W│, so the last term on the right will be negligible compared to the second term on the right. Therefore, we have
W│cos θ
d(│p
W│2) ≡ │p
W′│2 −│p
W│2 ≈ 2│p
W││ d p
(C10.2)
This expression becomes exact in the limit that dt becomes infinitesimal.
Now, conservation of momentum implies that the total change in the
W is the vector sum of the impulses [d p
W]A + [d p
W]B + ⋯
system’s momentum d p
carried into the system by external interactions A, B, …. Since by the definiW
W]A = F
tion of force, [d p
A dt and so on, so we have
Figure C10.1
How the addition of a small
impulse changes a system’s total
momentum.
W
W
WA + F
W
W
W = F
d p
A dt + F
B dt + ⋯ = [F
B + ⋯] dt = F
ext dt
(C10.3)
where F
Wext is the total external force exerted on any and all parts of the ­system.
We also know (see chapter C4) that a system’s total momentum is equal to the
W = M v
W CM.
system’s mass M times the velocity of the system’s center of mass: p
W
W
W
Note finally that v
CM dt = d r CM, where d rCM is the displacement of the system’s
­center of mass during our tiny time interval. If you substitute all these things
back into equation C10.2, you can show that
WCM│cos θ
dKCM ≡ d( _12 M│v
WCM│2 ) = │ W
Fext││d r
(C10.4)
where KCM ≡ _ 12 M│v
WCM│2 is the kinetic energy of the system’s center of mass
(treating the system as if it were a particle). (Note that θ, the angle between
W
W, is also the angle between F
pW and d p
ext and d Wr CM.)
Exercise C10X.1
(Important!) Show that equation C10.4 follows from C10.2 and C10.3.
The momentum requirement
expresses conservation of
momentum, not energy
This equation tells us how to calculate the change in the system’s centerof-mass kinetic energy _12 M│v
WCM│2 caused by the vector sum F
Wext of all external
forces acting anywhere on the system. Please note that this equation techniW
W
W│<< │p
cally applies in the limit that dt is so small that (1) │ d p
W│and (2) F
A, F
B, …
are essentially constant in magnitude and direction during dt.
I call equation C10.4, the momentum requirement to emphasize that
(as you can see from the derivation) it follows from conservation of momentum (and the definitions of force, velocity, and the center of mass) and has
nothing to do with conservation of energy. We will see that this equation will
help us sort out what momentum conservation requires regarding energy
transfers.
C10.2 The Dot Product
C10.2
157
The Dot Product
W
W
The combination │u
W││w
W│cos θ for arbitrary vectors u
and w
appears in so
many other contexts that people have found it worthwhile to invent a compact notation for it. We define the dot product u
W · w
W as follows:
W · w
W
u
≡ │u
W││w
W│cos θ
Definition of the dot product
of two vectors
(C10.5)
• Purpose: This equation defines the dot product between two vectors
W
W
W
W
u
and w
, where θ is the least angle between the directions of u
and w
.
• Limitations: This is a definition and so is exact.
• Note: The cross product yields a number with units that are the product
W
of the units of u
W and w
(which need not be the same).
In chapter C3, I noted that we had not (at that point) defined how to multiply
two vectors. This is one of two different ways of multiplying vectors that we
will discuss in this unit (the cross product is defined in chapter C7). Note that
the dot product produces an ordinary number, not a new vector.
Figure C10.2 shows that we can interpret this product as being │u
W│ times
W
W
W
W
the projection of w
on u
or as being │w
W│ times the projection of u
on w
.
The dot product has the following mathematical properties:
W · w
u
W = w
W · u
W
(the dot product is commutative) (C10.6a)
Mathematical properties of the
dot product
W · (w
W + s
W ) = u
W
W
W
W (the dot product is distributive) (C10.6b)
u
· w
+ u
· s
W · (b w
W) = b(u
W · w
u
W)
(the dot product is linear)
(C10.6c)
W · u
u
W =│u
W│2
(C10.6d)
(assuming│u
W│ ≠ 0 and│w
W│ ≠ 0)
W · w
W ⊥ w
u
W = 0 ⇔
u
W
(C10.6e)
These properties all follow pretty directly from the dot product’s definition except for the distributive property, which takes a bit more work (see
problems C10D.2 and C10D.3). The first four properties tell us that our welldeveloped intuition about how the products of ordinary numbers behave
algebraically should still apply to the dot product (which is a relief).
One important consequence of these properties is that we can calculate
the dot product of two vectors from their components as follows:
W · w
u
W = ux wx + uy wy + uz wz
(C10.7)
The dot product in terms of
components
One can prove this fairly directly by writing u
W and w
W in terms of basis vectors
and applying the properties (see problem C10D.5 for the details).
u
w
u
sθ
co
θ
(a)
Figure C10.2
u · w =|u|(|w|cos θ)
θ
w
u co
sθ
(b)
u · w =|w|(|u|cos θ)
w
Alternative interpretations of the dot product.
We can construct the projection of one vector on
­another by placing the vectors tail-to-tail, dropping
a perpendicular from the first vector’s head to the
­second vector to form a right triangle, and then measuring the length of the triangle leg along the second vector. We consider the projection to be negative if θ > 90°. In either case, simple ­trigonome­try
W
W is│w
W
implies that (a) the projection of w
on u
│cos θ and
W on w
W
(b) the projection of u
is│u
W│cos θ.
Chapter C10
158
Work
Using the dot product, the momentum requirement becomes:
W
dKCM = F
ext · d rWC M
(C10.8)
• Purpose: This equation describes how external interactions that exert a
W
total external force F
ext on a system as its center of mass moves through
a tiny displacement d rWC M affect the system’s center-of-mass kinetic
energy KCM ≡ _12 M│v
WCM│2, where M is the system’s total mass and v
WCM is
the velocity of its center of mass.
• Limitations: The process must have a short enough duration dt so that
W
(1) F
ext dt is small compared to the system’s total momentum and (2) the
forces that we add to get F
Wext are each constant during dt.
• Notes: This momentum requirement expresses what conservation of
momentum requires regarding energy transfers.
C10.3
The concept of work
Object boundary
Macroscopic
object
Fa Fb
…
Fc F = Fa + Fb +
F
(a)
Particles in
the region where F acts
The Definition of Work
Now a particle’s center-of-mass position is just the particle’s position rW, its
center-of-mass kinetic energy is simply its kinetic energy K, and all forces acting on the particle are external by definition, so the momentum requirement
W
W
for a particle reduces to dK = F
· d rW, where F
is the total force on the particle.
W
Consider now an interaction that exerts a total external force F
on a limited region of a (possibly deformable) macroscopic object. Any macroscopic
object is a system of particles, so the particles a, b, … in the region on which
W
W
W
the force acts receive forces F
a, F
b, … from this interaction such that F
=
W
W
F
a + F
b + ⋯ (see figure C10.3). When the object’s region moves a displacement
d rWduring a tiny time interval dt, all the particles in the region share that displacement. Therefore, the momentum requirement implies that the ­particles’
W
W
kinetic energies Ka, Kb, … change as follows: dKa = F
a · d rW, dKb = F
b · d rW, and
so on. This is now energy inside the system that has entered the system from
the external interaction that has exerted the force. So the total energy transferred into the system by this external interaction is
W
W
Wa + F
W
W
dW = F
a · d rW+ F
b · d rW+ ⋯ = [F
b + ⋯] · d rW= F
· d rW
Macroscopic
object
Fa Fb
Fc
(b)
dr
(note how I have handily used the dot product’s distributive property!). We
call dW the (differential) work done by the external interaction on the object.
Note that the object region on which the force acts might move either along
with the object’s center of mass or independently of that center of mass (if the
object is deformable).
To find the total work done during a finite displacement, we have to add
the differential works done during a sequence of tiny steps 1, 2, …:
W = dW1 + dW2 + ⋯ = ∑ F
Wi · d rWi
i
Figure C10.3
W
(a) A force F
acts on a region of
a macroscopic object, exerting
forces on particles in that region
W
W
W
such that F
= F
a + F
b + ⋯.
(b) If the region moves a tiny
displacement, so do each of the
particles in that region.
(C10.9)
(C10.10)
where F
Wi is the force exerted by the interaction during the ith step and d rWi is
the displacement of the surface or region where the force was applied during that step. This sum is easy to do if the applied force does not change in
magnitude or direction during the displacement: in such a case,
W
W
Wi = F
W
W = F
· ∑d rWi = F
· ΔrW (
F
= constant for all i)
i
(C10.11)
where ΔrWis the net displacement of the region on which the force acts.
C10.3 The Definition of Work
Now, equations C10.8 and C10.9 look very similar in form, but they say
W
and mean quite different things. Note that F
ext in equation C10.8 is the total
external force exerted everywhere on a system, while F
W in equation C10.9 is
the force exerted on a certain region of a macroscopic system. The displacement
d r WCM in equation C10.8 is the displacement of the system’s center of mass,
W in equation C10.9 is the displacement of a region. Most importantly,
while d r
dW is the energy that enters the system as a result of the external i­nteraction
W
that exerts force F
, but dKCM is the change in only that portion of the system’s
energy that is associated with the motion of its center of mass.
We can understand the difference between these expressions most clearly
if we consider the special case where F
W = F
Wext, that is, the force on the region
that we are considering is also the total external force on the object. Then,
dW = F
Wext · d rW gives us the total energy that enters the system because of this
interaction. Conservation of energy implies that the change in the ­system’s
W
total energy E is therefore dE = dW. On the other hand, dKCM = F
ext · d rWCM tells
us the portion of this energy that conservation of momentum requires must
show up as the change in the system’s center-of-mass kinetic energy. If d rW≠
d rWCM, then dW ≠ dKCM, and the difference must be due to changes in some
form of the system’s internal energy.
So work tells you about how much energy crosses a system boundary. The
momentum requirement tells you how that energy must be divided between
the system’s center-of-mass kinetic energy and other forms of energy.
The following example may help make this more concrete. Consider an
astronaut in a floating space station (so that gravity is not a factor). The astronaut crouches and then pushes against the station’s floor. As she pushes, she
straightens out so her center of mass moves upward some distance d (see
figure C10.4), and ultimately she leaves the floor with some upward speed.
Let’s use work and the momentum principle to analyze this situation.
The astronaut here is a deformable system. Note that since the contact
interaction between her feet and the floor exerts a downward force on the
W
floor by hypothesis, that interaction must exert an upward force F
of the same
magnitude on the astronaut’s feet. This is the only external force acting on
our system. But the place where this force is exerted (the bottom of her feet)
does not move, so this external force does no work on the astronaut, meaning
that the astronaut’s total energy as a system does not change(!).
However, the momentum requirement tells us that the astronaut’s centerW
of-mass kinetic energy must change. In the equation dKCM = F
· d r WCM, both the
W
force F
exerted by the contact interaction on her feet and her center-of-mass
displacement d rWCM are nonzero, and F
W and d rWCM are in the same direction
(upward), so F
W · d rWCM = │F
W││d r WCM│cos 0° = │F
W││d r WCM│ is positive, meaning that
the astronaut’s center-of-mass kinetic energy increases in this process. Since
the astronaut’s total energy cannot change (the external interaction did no
work), the astronaut’s center-of-mass kinetic energy must have come from
some form of internal energy. (In this case, the energy comes from “hidden”
chemical energy in the astronaut’s body.)
Exercise C10X.2
Now you try. Analyze the case where a person jumps vertically in the earth’s
gravitational field. Argue that the additional downward gravitational force
makes the net work in this case negative and that the person must use more chemical energy to achieve the same upward velocity v
WCM. (Hint: You can treat the
gravitational force as if its point of application is the person’s center of mass:
W
see problem C10D.8. Therefore, the gravitational work is Wg = F
g · ΔrWC M.)
159
Work contrasted with the
momentum requirement
Work describes the energy
that enters a system due to an
external interaction
The momentum requirement tells us how much of
this energy must go to kinetic
energy
An example
Initial:
Final:
Astronaut
F
vCM
d
Space station floor
Figure C10.4
An astronaut jumping from the
floor in a gravity-free space station.
160
Chapter C10
Work
We see that in both cases, work tells us about how much energy enters
the system due to the external force or forces, while the momentum requirement tells us what conservation of momentum implies must happen to the
system’s center of mass. We can use that information in these cases to infer
that the astronaut’s internal energy must decrease (and must decrease more
when jumping in the earth’s gravitational field).
So, to summarize, we define work to be “the energy that crosses a system
boundary due to an external interaction that exerts a force on the system.”
Specifically, the work done by an external force during a finite process is
A summary of the definition
and meaning of work
W
W = ∑ dWi = ∑ F
i · d rWi
W is constant
If
F
⇒
W
W = F
· ΔrW
(C10.12a)
(C10.12b)
• Purpose: This equation describes the work W done by (that is, the
energy that crosses a system boundary due to) an external interaction that
exerts a force during a process where the point or region on which the
force acts moves a certain distance.
W
• Notes: If the force is a constant vector F
during the process, then equaW is the total displacement of the point
tion C10.12b applies, where Δr
or region on which the force acts. If the force changes in magnitude or
direction during the process, then we must divide the process into tiny
steps and sum the quantity F
Wi · d rWi over all steps, where F
Wi is the force
that acts during the ith step and d rWi is the infinitesimal displacement of
the point or region on which the force acts during that step.
W
• Limitations: In the latter case, the steps must be small enough that F
i is
approximately constant during each step. In both cases, these expressions need careful reinterpretation when the affected particles are moving at speeds comparable to that of light.
Negative work means energy
flows out of the system
Work is to energy what
impulse is to momentum and
twirl is to angular momentum
Example C10.1
In this unit, we will only rarely consider quantitative cases where the applied
force during a process is not constant.
Work can be negative (if the angle θ between the force and displacement
is greater than 90°, so that cos θ < 0). Negative work means that the process
takes energy out of the system instead of putting energy into it.
Differential work dW is to a system’s total energy E what the impulse
W
W] = F [d p
dt delivered by an external interaction is to a system’s total momentum
W] = τ
W and the twirl [dL
p
Wdt delivered by an external interaction is to a system’s
W
total angular momentum L
: all characterize how much of the corresponding
conserved quantity crosses the system’s boundary during an infinitesimal
process. In chapter C12 and beyond, we will use the bracket notation [dE] to
indicate other kinds of energy flowing across a boundary, but we don’t have to
use that notation here, because the community already has a well-established
symbol dW for energy crossing a boundary due to an interaction that exerts
a force (conventional symbols do not historically exist for impulse and twirl).
Problem: Suppose you lift a box that weighs 100 N (about 23 lbs) a distance
of 1.5 m vertically, carry it 5 m horizontally, and then lower it to the floor.
Assume you do these things so slowly that the vertical force you exert on the
box is never significantly different than the box’s weight. What is the total
work you do on the box in this process?
C10.4 Long-Range Interactions
161
Solution Assuming we move the box so slowly that we can ignore the portions of the box’s motion where it is speeding up or slowing down, the total
force on the box will remain nearly zero, so the force F
W you must exert on
the box must be upward and equal in magnitude to the box’s weight. To
calculate the work, we can divide up the box’s motion into three steps: the
step where you are lifting the box vertically, the step where you carry it horizontally, and the step where you lower the box to the floor. If the box is rigid,
then it doesn’t really matter where on the box we exert the force, but for the
sake of argument, let’s assume you exert the force on its bottom.
During the first step, the box’s bottom surface moves (along with the rest of
the box) a displacement of ΔrW1 = 1.5 m upward. This is parallel to the upward
force you exert on the box, so (since the force is approximately constant during this process) the work you do is W1 = F
W · ΔrW1 =│F
W││ΔrW1 │cos 0° = (100 N)
(1.5 m) = 150 J (since 1 J = 1 N·m).
During the second step, the displacement of the box’s bottom surface is
ΔrW2 = 5.0 m horizontally. This is perpendicular to the upward force you exert
W
on the box, so the work you do is W2 = F
· ΔrW2 =│F
W││ ΔrW2 │cos 90° = 0.
During the third step, the displacement of the box’s bottom surface is
ΔrW3 = 1.5 m downward. This is opposite to the upward force you exert on
W
the box, so the work you do on the box is W3 = F
· ΔrW3 = │F
W││ ΔrW3│cos 180° =
(100 N)(1.5 m)(−1) = −150 J. The total work you have done is therefore
W1 + W2 + W3 = 150 J + 0 J − 150 J = 0. Your back may feel like you have done
work, but you actually have done zero net work on the box.
Since the force you exert on the box has the same constant value during
the entire process, we could have combined all the steps into a single step:
the net displacement is ΔrW= ΔrW1 + ΔrW2 + ΔrW3 = 5 m horizontally in this case,
so the total work is simply W = F
W · ΔrW= │F
W││ Δr W│cos 90° = 0, as before.
C10.4
Long-Range Interactions
With the help of these concepts, we can now better understand why longrange gravitational or electrostatic interactions acting on a macroscopic
object rarely significantly affect its internal energy. If an object is rigid, then
in any infinitesimal process, the displacement d rWof each particle in the object
is the same as d rWCM. Therefore, when an external gravitational or electrostatic
W
W
interaction is the only interaction that exerts a force F
= F
ext on the object,
W
W
we can see that dW = F
· d rW = F
ext · d rWCM = dKCM. Therefore, the momentum
requirement states that the change dKCM in the object’s kinetic energy must be
equal to the energy dW flowing into the object, which implies that no energy
can be transformed either to or from the object’s internal energy. So the internal energies of rigid objects are not affected by long-range gravitational or
electrostatic interactions. This is also true for deformable objects in a uniform
gravitational field (see problem C10D.8).
But it is not true if the field is nonuniform and the object can deform.
Moons that orbit close to their planet can be deformed by the planet’s notquite-uniform gravitational field (the planet attracts the moon’s nearest
parts a bit more strongly than the farthest parts). In such a case, external
gravitational interactions can channel energy into the moon’s internal energy.
Jupiter’s moon Io, for example, has many erupting volcanos because of the
internal energy Io gains from being flexed by Jupiter’s gravitational field as
Io moves closer to and farther from the planet in its elliptical orbit.
But such effects are typically insignificant if the object is truly rigid
and/or is much smaller than the distance to the attracting object’s center.
Why long-range interactions
don’t affect the internal energies of reasonably rigid objects
162
Chapter C10
C10.5
The compression and friction
aspects of a contact interaction
The definition of the “normal”
force exerted by a contact
interaction
The normal part of the contact
interaction has no effect on the
energy of a sliding object
Work
Contact Interactions
Consider now the contact interaction between an object and a surface. We can
typically model the total contact interaction between two surfaces as having
two essentially independent parts, a compression part that seeks to prevent
the surfaces from merging, and a friction part that either prevents or opposes
their sliding relative to each other along their interface (see section C2.6 for
a discussion of these categories). We in fact define the interaction’s compression part to be the part of the interaction that exerts a force vector (on either
surface) perpendicular to the interface, while the friction part is the part that
exerts a force vector in the plane of the interface. We can express whatever
total force the interaction exerts as a sum of such component vectors. Figure
C10.5 illustrates these forces for a block sliding on a surface.
Physicists typically call the force exerted by the interaction’s compression
part a normal force. “Normal” in this context does not mean “conventional”
or “customary,” as the word does in contemporary English, but rather “perpendicular,” which was the word’s original (17th century) meaning (according to the Oxford English Dictionary, the word comes from a Latin word
referring to a carpenter’s square). I will use the notation F
WN for this force and
W
FF for the friction force (as shown in figure C10.5a).
Now, consider a rigid object sliding along a surface. Let the object be
the system: its contact interaction with the surface will therefore be external.
Because the object is rigid, the displacements d rWof the particles on its bottom
surface that actually feel the normal force are all parallel to the surface, while
the normal force is (by definition) perpendicular to that surface. Therefore,
dW = F
WN · d rW = │F
WN││d r W│cos 90° = 0: the normal part of the contact interaction
does no work on the sliding object. Moreover, if F
Wother is the sum of other ­external
forces acting on the object, then the momentum requirement implies that the
change in the sliding object’s center-of-mass kinetic energy is
WN + F
dKCM = F
Wext · d r WCM = (F
Wother) · d r WCM = F
WN · d rWCM + F
Wother · d rWCM
W
= 0 + F
other · d rWCM
The friction part does have
energy implications
The analogous decomposition
of forces on an airplane wing
(C10.13)
W
because d rWCM is also perpendicular to F
N for a rigid sliding object. Therefore,
the normal force does not affect the object’s KCM either. So internal energy
changes in the object must be due to the actions of other forces, not F
WN. The
normal force therefore has no effect of any kind on the sliding object’s energy:
from an energy perspective, it is as if this part of the interaction did not exist!
This is not true of the friction part of the interaction. Since the friction force
WF is always opposite to the sliding object’s motion, it will be opposite to
F
that object’s center-of-mass displacement d r WCM, meaning that F
WF · d r WCM will
W
be negative. Thus (in absence of other forces), F
F would slow the sliding
object down. Also F
WF will do some work on the sliding object. Exactly how much
work is impossible to determine, because no object is rigid on the microscopic
W that various block atoms experience as
scale, and the actual displacements d r
they respond to atoms on the surface is complicated and not generally equal
(even on the average) with d r WCM, but in general is also negative.* The point is
that, unlike the compression part, the frictional part of a contact interaction
does have energy implications that cannot be ignored.
The same kind of analysis is useful in other situations as well. Consider
the contact interaction between the air and an airplane wing. As figure C10.5b
shows, we can similarly divide the total force that this interaction exerts on
*See Sherwood and Bernard, “Work and heat transfer in the presence of sliding friction,” American Journal of Physics, 52, pp. 1001–1007 (Nov. 1984) for a full discussion.
C10.5 Contact Interactions
Total force exerted by
the contact interaction
163
Total force exerted by
the contact interaction
String
FN
FL
Block
FF
(a)
Surface
(b)
FD
Wing
Tension force on the
ball due to the string
(c)
FT
Ball
Figure C10.5
(a) We can subdivide the total force exerted on a sliding block by its contact interaction with a surface into a “normal”
part perpendicular to the surface and a “friction” part parallel to the surface. (b) Similarly, we can subdivide the total force
exerted on an airplane wing into a “lift” part and a “drag” part. (c) The tension force exerted by an inextensible string
tied between a fixed point and a swinging object is perpendicular to the object’s motion. In all three cases, the part of the
interaction that acts perpendicular to the object’s motion has no direct energy implications.
the wing into two components, a component opposite to the plane’s motion
W
(which we call the drag force F
D) and a component perpendicular to that (which
W
we call the lift force F
L on the wing). The lift part of the interaction neither does
any work on the plane nor contributes to the plane’s center-of-mass kinetic
energy, so (from an energy perspective) it does not matter. The drag aspect,
however, does have energy implications.
Finally, consider an object swinging at the end of an inextensible string
whose other end is tied to a fixed point (see figure C10.5c). Because the string
is flexible, the contact interaction between the object and string can only exert
a force parallel to the string. But if the string is truly inextensible, the object’s
motion must be perpendicular to the string (as any displacement parallel to
the string would have to change the string’s length). Thus, the force exerted
by the string in this case neither does any work nor contributes to the object’s
center-of-mass kinetic energy, so (from an energy perspective) it has no direct
energy implications.
The practical message that I’d like you to take away from this discussion
is that whenever we have an internal interaction in a system that we know
exerts a force that is always perpendicular to an object’s displacement, we
can ignore that interaction in a conservation-of-energy problem: such a force
has no direct energy implications. Therefore, we now have two categories of
internal interactions that we can handle in such a problem: (1) long-range
interactions that we can handle by using a potential energy formula and
(2) frictionless contact interactions that exert forces perpendicular to an
object’s motion, which we can handle by ignoring them. This greatly broadens
the range of practical situations to which we can apply conservation of energy.
Of course, internal interactions that exert forces perpendicular to the
objects’ motions do influence the trajectories the objects follow, and that indirectly affects the energies those objects receive from other sources. But once
we understand and take into account the trajectories the objects follow, we
have completely handled all the energy implications of such interactions.
In the list of internal interactions you construct in the solution to a
­conservation-of-energy problem, I recommend you list any interaction that
exerts a perpendicular force, but instead of writing a potential energy formula for that interaction (as you would for a long-range interaction), simply
write “⊥” to indicate that this interaction exerts a force on a moving object
that is perpendicular to that object’s motion, and so has no direct energy
implications that we need to track.
The following example illustrates how to handle such an interaction.
The tension force exerted by an
inextensible string on an object
swinging from it also has no
effect on that object’s energy
Any internal interaction that
exerts a force perpendicular
to an object’s motion has no
direct energy implications
How to represent such an
interaction in a list of internal
interactions
164
Example C10.2
Chapter C10
Work
Problem: A roller coaster car with almost frictionless wheels rolls over a crest
in the track at a speed of 3.0 m/s, then rolls down the track to a point that is
50 m east and 22 m lower than the crest. What is the car’s speed at that point?
Solution Initial and final drawings appear below.
z
Initial:
vi
zi
Track
Internal interactions
• Gravitational:
Vg = m g z
• Contact (track & car):
⊥ (if frictionless)
zi = 22 m
zf = 0 m
xi = 0 m
xf = 50 m
vi = 3.0 m/s
g = 9.8 m/s
vf = ?
m=?
Final:
Car, mass m
0
x
xf
vf
The system here is the earth and the car (we will consider the track part of
the earth). This system is isolated because it floats in space. As listed above,
the internal interaction in this case is basically a gravitational interaction
between the earth and car, and the contact interaction between the track and
car. Since the car is always near the earth’s surface, we can use the potential
energy formula Vg = m│g
W│z. It does not matter that we are measuring the
car’s vertical position from the place where it touches the track instead of its
center of mass: because the car is rigid, the change in z will be the same in
either case. If we assume the car’s wheels really are frictionless, then whatever force the contact interaction between the track and car exerts on the
car will be perpendicular to the car’s motion, and therefore can be ignored.*
Since the earth is so much more massive than the car, its initial and final
kinetic energies Kei and Kef are essentially zero. Since neither the frictionless
contact interaction nor the gravitational interaction should affect either the
earth’s internal energy Ue or the car’s internal energy Uc, we will assume that
these energies remain constant. Therefore, the master equation in this case is
⏞
⏞
0
0
_ 1 m│v
Wi│2 + K
ei+ m│g
W│zi + U
@e + Uc = _ 12 m│v
Wf│2 + K
ef+ m│g
W│ zf + U
@e + Uc (C10.14)
2
All the nonzero terms contain the car’s unknown mass m, so that cancels out.
Multiplying both sides by 2 and noting that zf = 0, we have
____________
Wf|=
│v
Wi│2 + 2│g
W│zi =│v
Wf│2 + 2│g
W│· 0 ⇒│v
Wf│2 =│v
Wi│2 + 2│g
W│zi ⇒|v
│v
Wi│2 + 2│g
W│zi
____________________________
( s )
(
)
2
m
⇒ │v
Wf│ =
3 __
m + 2 9.8 __
m (22 m − 0 m) = 21 __
s2
s
(C10.15)
(Note that we must take the positive square root in the last step of the first
line, because │v
Wf│ is a vector magnitude and so must be positive.) The units
work out and the result is plausible (about 47 mi/h).
*Of course, the contact interaction between the track and car exerts a force on the
track as well, and (through the track) on the earth. This force may not be perpendicular to the earth’s motion. But since the earth’s displacement is utterly negligible, this
force will do no significant work on the earth as a system, nor affect its kinetic energy.
Two-Minute Problems
165
TWO-MINUTE PROBLEMS
C10T.1 Two hockey pucks are initially at rest on a horizontal plane of frictionless ice. Puck A has twice the mass of
puck B. Suppose we apply the same constant force on each
puck for the same interval of time dt. How do the puck’s
kinetic energies compare at the end of the interval?
A. KA = 4KB
B. KA = 2KB
C. KA = KB
D. KB = 2KA
E. KB = 4KA
F. Some other relationship (specify)
C10T.2 Two hockey pucks are initially at rest on a horizontal plane of frictionless ice. Puck A has twice the mass of
puck B. Suppose we apply the same constant force on each
puck until each puck has crossed a finish line 1 m away
from its starting point. How do the puck’s kinetic energies
compare when each crosses the finish line?
A. KA = 4KB
B. KA = 2KB
C. KA = KB
D. KB = 2KA
E. KB = 4KA
F. Some other relationship (specify)
C10T.3 Two hockey pucks are initially at rest on a horizontal plane of frictionless ice. Puck A has twice the mass of
puck B. Suppose we exert a constant force on puck A until
it has traveled 2 m from its starting position. We exert a
force of the same magnitude on puck B until it has traveled
1 m from its starting position. How do the pucks’ kinetic
energies compare when we stop pushing them?
A. KA = 4KB
B. KA = 2KB
C. KA = KB
D. KB = 2KA
E. KB = 4KA
F. Some other relationship (specify)
C10T.6 In the situation described in problem C10T.5, will
the car’s internal energy increase, decrease, or remain
unchanged? (Be prepared to explain your answer in terms
of the momentum requirement and the work done.)
A. Increase
B. Decrease
C. Remain unchanged
D. One needs more information to answer
C10T.7 A person who exerts a 100-N force horizontally in
the +x direction on a wall for 10 minutes does positive
work on the wall. T or F?
C10T.8 A person squeezes a balloon horizontally with both
hands while holding it at rest, decreasing its width by a
certain amount. Is the work done on the balloon by the
person positive, negative, or zero?
A. Positive
B. Negative
C. Zero
D. One needs more information to answer.
W
C10T.9 An external interaction exerts a force F
on a certain
system as the place where the force is applied moves a
displacement d rW = [dx, dy, dz]. Which of the following is
the correct component expression for the work done by the
interaction on the system?
A. W = [Fx dx, Fy dy, Fz dz]
B. W = │ [Fx dx, Fy dy, Fz dz]│
C. W = Fx dx + Fy dy + Fz dz
D. Some other expression (specify)
C10T.10 When an object slides down a frictionless incline,
the contact interaction between the object and incline does
no work on the object. T or F? The interaction does not
change the object’s kinetic energy. T or F? The interaction
does not change the object’s momentum. T or F?
C10T.4 A basketball player lands on the ground after dunking the ball. Is the work done on the player by the contact
interaction between the player and ground positive, negative, or zero?
A. Positive
B. Negative
C. Zero
D. One needs more information to answer.
C10T.11 Suppose we use a string to suspend a ball from
a hook in the ceiling. As the ball swings back and forth,
which interaction does work on the system if
(a) we consider the system to be the ball or
(b) we consider the system to be the ball and the earth?
A. The ball’s gravitational interaction with the earth
B. The ball’s contact interaction with the string
C. Both interactions
D. Neither interaction
C10T.5 A car runs into a brick wall. The collision pushes in
the car’s front end about a meter. Is the work done on the
car by the contact interaction between it and the wall positive, negative, or zero?
A. Positive
B. Negative
C. Zero
D. One needs more information to answer.
C10T.12 A heavy ball swings at the end of a chain connected to a hook in the ceiling. Suppose I pull the ball
away from its equilibrium position, hold it against my
nose (with the chain taut), and then release the ball from
rest. The ball swings away and then back toward my
face. As long as I don’t move, and the ball is left alone,
I can be confident that the ball will not smash my nose.
T or F?
Chapter C10
166
Work
C10T.13 A bead slides from rest down a frictionless wire in
the earth’s gravitational field. The diagram below shows a
set of shapes that the wire might have.
(a) At the bottom of which path will the bead have the
highest speed?
(b) Along which path will the bead take the least time to
get from its initial position to its final position?
Bead (initial
position)
E
D
Gravity
F.
The quantity
is the same
for all paths
C
C10T.14 A skier starts from rest, slides down a frictionless
slope, and slides off a ski jump angled up at 45° with
respect to the horizontal. Which of the trajectories shown
below will the skier follow? [Hint: Note that at the peak of
each of the three possible trajectories, the skier is moving
with nonzero speed horizontally.]
A
vi = 0
B
H
C
h for path A
B
A
Bead (final
position)
D. There is not enough information provided to tell.
HOMEWORK PROBLEMS
Basic Skills
W
W
C10B.1 Consider two vectors u
= [2 m, −1 m, 3 m] and w
=
[5 m, 2 m, −2 m].
(a) What is the dot product of these vectors?
(b) What is the angle between these vectors?
W
C10B.2 Two displacement vectors u
= [3 m, −5 m, 2 m] and
W = [−4 m, −2 m, ?] are perpendicular. What is wz?
w
C10B.3 Suppose you push a crate 5 m along a level floor
by exerting a force that has a magnitude of 80 N and that
points 30° downward from the horizontal. How much
work do you do on the crate by exerting this force?
C10B.4 Suppose an external force acts on a system that has
a constant magnitude of 100 N but changes direction at
a constant rate from being directly horizontal to directly
vertical as the point where the force is applied moves a
horizontal distance of 10 cm at a constant speed.
(a) Estimate the work that the interaction exerting this
force does on the system by dividing the process into
W
ten equal displacements, calculating dWi = F
i · d rWi for
each step, and adding the results. (Note: Calculate the
W
angle between F
i and d rWi at the midpoint of each step.)
(b) Compare to the (more) exact result (20/π) N, which
one can find using calculus. Are you close?
C10B.5 Suppose the point where an external force on a system acts moves 10 cm in the +x direction. The force always
points in the +x direction and grows in magnitude from 0
to 100 N during the displacement.
(a) Estimate the work the interaction exerting this force
does on the system by dividing the process into ten
equal displacements, calculating dWi = F
Wi · d rWi for each
step, and adding the results. (Note: Calculate the magW
nitude of F
i at the midpoint of each step.)
(b) Compare to the exact result of 5.0 N, which one can
find using calculus. Are you close?
C10B.6 A car whose weight is 20,000 N (meaning that its
mass is about 2000 kg) is traveling at a constant speed of
25 m/s up an incline that makes an angle of 4° with respect
to the horizontal. Consider the car alone to be the system.
(a) What work does the gravitational interaction between
the car and the earth do on the car each second?
(b) What does the momentum requirement imply about
the total external force acting on the car?
(c) Is the car’s internal energy increasing or decreasing?
Defend your response in each case.
C10B.7 Suppose you sit on an exercise ball, squashing it
vertically by about 15 cm. In this process, the ball’s center
of mass moves down about half that distance, but is initially and finally at rest. For each of the quantities listed
below, specify whether it is positive, negative, or zero, and
justify your response.
(a) The work that your posterior does on the ball
(b) The work that the floor does on the ball
(c) The net change in the ball’s kinetic energy
(d) The net change in the ball’s internal energy
C10B.8 A 1000-kg car traveling at 20 m/s runs into a brick
wall, which exerts a constant force on the car as the car’s
front end crumples. In the process, the car’s center of mass
moves forward about 0.50 m. Consider the car the system
and ignore friction (the car rolls freely).
(a) Explain why none of the external forces acting on the
car do any work on the car.
(b) What is the magnitude of the force that the wall exerts
on the car, and how do you know?
(c) By how much does the car’s internal energy increase?
Justify your result.
Homework Problems
C10B.9 Suppose that a ball of mass m is swinging from the
end of a string of length L whose other end is attached
to the ceiling. Consider the ball to be the system. As the
ball swings back and forth, the string makes a maximum
angle of θ with respect to the vertical. You allow the ball to
swing a half-cycle from its extreme angle on one side to the
extreme angle on the other side.
(a) How much work does the string do on the ball?
(b) What does the momentum requirement imply that the
net change in the ball’s kinetic energy must be?
(c) If the ball swings only a quarter cycle (from one
extreme angle to the bottom of its arc), how do your
answers to the previous questions change (or do they)?
Defend your answer in each case. (Hints: Note when considering the momentum requirement that we can break up
Wext = F
W
W
W
F
T + F
g, where F
T is the force exerted by the string and
Wg is the force exerted by gravity. The distributive property
F
of the dot product means we can consider each force’s conW
tribution to the dot product F
ext · d rWC M separately.)
C10B.10 Suppose you throw a ball horizontally against a
wall. Explain in a couple of sentences why we can consider
the ball to be an isolated system during the entire time the
ball is moving nearly horizontally (including the interval
when the ball is in contact with the wall) even though the
ball is clearly participating in significant external interactions with the wall and with the earth.
C10B.11 While holding onto a horizontal bar, you do a pullup, slowly lifting your center of mass a distance h. If we
assume you are moving very slowly at each stage of this
process, then the bar will exert an upward force on your
hands that is essentially equal to your weight throughout
the process.
(a) Describe the work that various external forces do on
you during the process, and argue that the net work
done on you is −m│g
W│h, where m is your mass.
(b) This is energy flowing out of you. Where do you think
this energy might be coming from?
(c) Now define the system to be you and the earth. Where
does the energy that flows out of you go?
Modeling
C10M.1 A 42-g racquetball flying at 21 m/s exactly horizontally slams into a wall. Midway between the instant that
the racquetball begins to touch the wall and the instant
when the ball leaves the wall after it rebounds, there is an
instant where the ball is at rest, flattened against the wall.
Model the racquetball as if it were a spring.
(a) Carefully explain why we can treat the ball as an isolated system throughout the process of rebounding
from the wall even though it clearly participates in a
number of significant external interactions.
(b) Calculate the racquetball’s effective spring constant if
at the instant it is at rest, its horizontal width (= the
equivalent spring’s “length”) is half its normal value
of 5.7 cm. (Assume that all of the increase in the ball’s
internal energy goes to spring energy.)
167
C10M.2 A person is sitting on a cart with nearly frictionless wheels. The total mass of the person and cart is M.
The person then pushes hard but with a constant force F
W
against the wall. By the time the person has pushed the
cart a distance d away from the wall, the cart and rider are
traveling at speed │v
W│.
(a) Carefully explain why we can treat the person and cart
as an isolated system even though the person interacts
with the wall, the cart interacts with the floor, and both
interact with the earth.
(b) Express │F
W│ in terms of M, │v
W│, and d, and carefully
explain your reasoning.
(c) If M = 60 kg, │v
W│ = 3.0 m/s, and d = 0.50 m, what is
│F
W│ ?
C10M.3 You are investigating an accident where a car that
was parked without its emergency brake set rolled down a
straight slope a distance of D (as measured along the road)
and hit a parked van. The slope makes an angle of θ with
respect to the horizontal. You need to determine what the
car’s speed │v
W│ was when it hit the van.
(a) What must you assume to determine this speed?
Explain carefully.
(b) Find an expression for│v
W│ in terms of D, │g
W│ , and/or θ.
(c) Check that the units of your expression make sense.
C10M.4 Tarzan steps off a branch 3.0 m above the ground
and swings downward on a vine. If his feet are about
1.0 m off the ground at the swing’s lowest point, what is
his speed there?
C10M.5 A small object swings back and forth at the end of
a massless inextensible string in the earth’s gravitational
field. If the string has length L and makes a maximum
angle of θ with respect to the vertical, what is the object’s
speed at the bottom of its arc?
C10M.6 A climber on a steep pitch of ice accidently dislodges a rock, which begins sliding freely down the slope.
At about what vertical distance below the climber does the
rock’s speed exceed 100 mph? (Assume the ice is nearly
frictionless and the rock slides without rotating.)
C10M.7 The Kingda Ka roller coaster at Six Flags Great
Adventure and Safari in New Jersey currently holds the
world record for maximum height (139 m). A hydraulic
motor accelerates the roller coaster cars to 128 mi/h before
they start climbing the 139-m hill. If the cars are traveling
at about 10 mi/h as they go over the top, what fraction of
the cars’ original kinetic energy must have gone to some
form of internal energy in the cars, track, and/or the air?
C10M.8 Expanding on the popularity of zip-lining, you
invent “crane-swinging,” where a person swings across a
canyon at the end of a long cable suspended from a crane.
Suppose the canyon is 890 ft across, and that when a person is at the launch-point, the cable connecting the person
to the crane makes a 45° angle with the vertical. Ignoring
air friction, what would the person’s speed be at the bottom of his or her swing?
Chapter C10
168
Work
C10M.9 You are traveling along a highway at 67 mi/h. Just
as you begin to climb a 100-ft-tall hill, you run out of gas.
You know that there is a gas station on the other side of the
hill. Is it even possible that you can coast over the hill if
you put the car in neutral and simply let it roll? Provide a
quantitative justification.
Derivations
W ′ = p
W, as shown below.
C10D.1 Let p
W + d p
p’
dp
θ
dp sinθ
dp cosθ
p
Apply the Pythagorean theorem to this drawing to prove
W│cos θ + │ d p
W│2.
that │p
W′│2 = │p
W│2 + 2│p
W││ d p
C10D.2 From the basic definition of the dot product (equation C10.5, prove all of the properties of the dot product
listed in equation C10.6 except for the distributive property
(equation C10.6b). (Hint: Most of the proofs will be only a
few lines.)
C10D.3 We can prove that the dot product is distributive as
follows. Let s
W ≡ w
W + q
W. Note that we can think of the dot
product u
W · s
W as being │u
W│ times the projection of s
W on u
W. The
figure below shows this projection as well as the projecW
W on u
W
tions of w
and q
.
C10D.6 (Requires basic integral calculus.) Suppose you
slowly compress a spring horizontally against a wall, exerting whatever force is necessary. Let us define the spring’s
central axis to be aligned with the +x direction, and suppose you push on the spring in the +x direction to compress it. Consider the spring to be the system.
(a) The wall also exerts a force on the spring, but argue
that this force does no work on the spring.
(b) In chapter C9, we saw that the force exerted on an object
by an interaction was given by Fx = −dV/dx, where
V(x) was the interaction’s potential energy. We also saw
that even though the energy in a spring is technically
internal energy (not potential energy), an ideal spring’s
internal energy U behaves just like a potential energy.
So let’s assume the spring’s end exerts a force on your
hand whose x component is Fx = −dU/dx. Argue that
the force your hand must exert on the spring’s end
must be FH,x = +dU/dx.
(c) Argue mathematically that the work W you do on the
spring is the same as the change in the spring’s internal
energy: W = ∆U.
C10D.7 Use the component form of the dot product of two
arbitrary vectors u
W and w
W to prove the trigonometric identity cos (θ − ϕ) = cos θ cos ϕ + sin θ sin ϕ.
s
q
θ
θ1
w
specifies how far we are to go in the +x direction (the
direction specified by eW x) and so on.
(a) Argue that the basic definition of the dot product given
by equation C10.5 implies that eWx · eW x = eW y · eW y = eW z · eW z = 1,
but that the dot products of all other possible pairings
of the vectors eW x, eWy, and eW z are zero.
(b) Use this and the distributive property of the dot product to prove the component form of the dot product
given in equation C10.7.
θ2
u
W
W
(a) Assume that w
, qW , and u
all lie in the same plane. Use
the diagram above and a trigonometric identity to
W
W + q
prove that u
· (w
W) = u
W · w
W + u
W · q
W.
(b) Assume that s
W and u
W define the plane of the diagram
W
W no longer necessarily lie in that
above, but that w
and q
same plane. Adjust your proof for part (a) to take this
into account.
C10D.4 Why not simply define the product of two vectors
W ≡ │u
to be the product of their magnitudes: u
W w
W││w
W│? Prove
that such a product does not satisfy the distributive property. (A product that does not satisfy this property is much
less useful than one that does.)
C10D.5 Let us define eW x, eW y, and eW z to be vectors with magnitudes equal to 1 and which point in the +x, +y, and +z
directions, respectively. We can therefore write any vector
W in the form u
W
u
= ux eWx + uy eWy + uz eWz, since ux by definition
W
C10D.8 Prove that when an external gravitational force F
g
acts on a system near the earth’s surface, the work done by
W
that force during any process is Wg = F
g · ΔrWC M, even if the
system deforms during the process. (Hints: Divide the system into its constituent particles. The gravitational force on the
W
ith particle is F
g,i = mi g
W. Since the work done by the gravitational force is constant as the ith particle moves, the graviW
tational work done on that particle is Wg,i = F
g,i · ΔrWi, where
W
Δr i is the ith particle’s displacement, no matter what that
displacement is as the system moves and/or deforms.
Sum this over all particles, use the definition of the cenW, where M is the
ter of mass, and use the fact that F
Wg = M g
system’s mass, to complete the proof. Note that this proof
does not apply to Io, because Io is large enough that the
gravitational field of Jupiter is not constant across it. The
argument above assumes a uniform gravitational field.)
Rich Context
C10R.1 In 2085, your company wins a contract to deliver
oxygen to several asteroid-based habitats from another
asteroid with plenty of oxygen locked up in ice. Since there
is no drag in space, the size of the oxygen containers is
Answers to Exercises
169
not an issue, and the most economical method turns out
to be to enclose about 6 × 105 kg of cold but gaseous oxygen at about half atmospheric pressure in a Mylar sphere
100 m in diameter. To this sphere, you have strapped a
small rocket engine. While the engine is firing, the engine
presses into the sphere roughly 10 m, like a finger pushing
in on a balloon, as the sphere accelerates. The engine exerts
a constant thrust until the sphere reaches its interasteroidal
cruising speed of 100 m/s. The sphere travels about 5.0 km
while the engine is firing. What fraction of the energy the
rocket engine has given to the sphere ends up as internal
energy in the gas just before the engine shuts off?
C10R.2 You are investigating a mishap on a mountain railroad. On the evening of June 15, one railroad car was left
parked at the top of a hill above another car of the same
mass, as shown in the diagram below. On the morning of
the 16th, both cars are found coupled together in the lake.
Original positions of cars
(Mass of each = 3300 kg)
24 m
Lake
7m
65 m
50 m
(The tracks go right up to the lake’s edge to facilitate loading boats with ore.) The supervisor claims that the engineer
must not have set the brake on the upper car, and during
the night, it rolled down, hit, and coupled with the lower
car. Their common momentum then carried them into the
lake. The engineer disputes this, saying that someone must
have released the brake and then pushed the upper car.
Use physics to resolve this dispute. (Hints: Momentum is
conserved in the collision between the cars, but that collision will convert some energy to internal energy in the
cars. Divide the supervisor’s hypothetical scenario into
three processes: from when the upper car starts rolling to
just before the collision, the collision process itself, and
then just after the collision to when the cars roll into the
lake, if they do. Apply an appropriate conservation law to
each of these three processes.)
C10R.3 A pilot makes a crash landing on the top of a mesa
that stands 250 m above the surrounding plain (a mesa is
a hill with very steep sides and a flat top). The pilot fixes
the plane and wants to take off again, but the only reasonably smooth patch that could be used for a runway is not
long enough. The pilot estimates that the maximum speed
the plane is likely to reach before going off the end of the
mesa to be 45 mi/h, but the plane needs an airspeed of
about 120 mi/h before the wing’s lift becomes significantly
larger than the plane’s weight. Noting that the side of the
mesa is essentially a vertical cliff, the pilot ponders whether
deliberately driving the plane off the edge at 45 mi/h and
diving downward as well as forward will allow the plane
to pick up enough airspeed to pull out of the dive before
hitting the plain below the mesa. What would you advise
the pilot to do? Try it and risk crashing, or hope for rescue
and risk dying of dehydration and exposure? Do not ignore
either the lift or drag components of the wing’s interaction
with the air, but also remember that the plane has a propeller that can exert a forward force on the plane that is at least
as strong as the backward drag force the plane experiences
at speeds smaller than 120 mi/h.
ANSWERS TO EXERCISES
C10X.1 If we substitute equation C10.3 into equation C10.2,
we get
d(│p
W│2) = 2│p
W││F
Wext│dt cos θ
(C10.16)
Substituting │p
W│ = M│v
WCM│ into both sides then yields
d(M2│v
WCM│2) = 2M│v
WCM││F
Wext│dt cos θ
(C10.17)
Note that the system’s mass M does not change in the process envisioned, so d(M2│v
WCM│2) = M2d(│v
WCM│2). If we now
W
divide both sides by 2M and use │v
CM│dt = d rWC M, we get
_12 Md(│v
WCM│2) = d( _12 M│v
WCM│2) = │F
Wext││r WCM│cos θ
(C10.18)
W
C10X.2 In addition to the force F
exerted on her feet, a person jumping in a gravitational field has an external force
Wg acting on her. We can model a gravitational force as if the
F
point where the force is applied is the person’s center of
mass, as noted in problem C10D.8. So though the force on
the person’s feet still does no work on the person, the gravitational force (since it is constant during the process) does
work Wg = F
Wg · ΔrWC M on the person. Since ΔrWC M is upward,
but the gravitational force is downward, this work is negative, meaning that energy flows out of the system. If the
person’s final speed │v
WCM│ is the same as it was without
gravity, then the person’s final kinetic energy is also the
same as it was. So the person’s internal chemical energy
must change by the amount required to provide both that
kinetic energy and the work that flows out of the system,
and therefore must be larger than it would be if there were
no gravity. This intuitively makes sense—the person will
certainly have to expend more effort to jump in a gravitational field than in space.
C11 Rotational Energy
Chapter Overview
Introduction
This chapter begins a three-chapter section on various forms of internal energy in progressively more hidden forms. In this chapter, we look at rotational energy. Including
such an internal energy term allows us to handle friction interactions that cause an
object to roll without slipping.
Section C11.1: Introduction to Rotational Energy
Empirically, an object that slides frictionlessly down an incline moves faster than an
object of the same mass that rolls down the same incline, even though the decrease in
gravitational potential energy is the same in both situations. We can explain this if the
rolling ball has an internal energy U rot associated with its rotation that soaks up part
of the potential energy released.
Section C11.2: Rotational Energy of an Object at Rest
By considering the motions of the particles in a rotating object at rest, we can conclude that the internal energy associated with the object’s rotation must be
U rot = _ 12 I│ω
W│2
where
2
i
(C11.3)
2
I = ∑ mi r = αMR
(C11.4)
• Purpose: These equations specify the rotational internal energy U rot that a
W
rigid object rotating with angular velocity ω
contains. I is the object’s moment
W
of inertia around the rotation axis specified by ω
, mi is the mass of the object’s
ith particle, ri is the distance that particle is from the axis, and the sum is over all
particles. M is the object’s mass, R is the maximal value of ri, and α is a unitless
constant (0 ≤ α ≤ 1) that depends on the distribution of mass within the object.
• Limitations: The object must be rigid (but need not be symmetric). All particles must also move much slower than the speed of light.
W
• Notes: These equations assume that ω
is expressed in rad/s.
Note the similarity in form between this equation and the formula for kinetic energy.
Section C11.3: Calculating Moments of Inertia
One can calculate an object’s moment of inertia for a given rotation axis by dividing the object into pieces that are small enough so all the particles in each piece are
­essentially the same distance from the rotation axis. This section illustrates several
such calculations and underlines the simplifying value of using unitless variables
such as u = r/R (where r is distance to the axis and R is the object’s outside radius).
170
Section C11.4: When an Object Both Moves and Rotates
Although this is not obvious, the total energy of an object that is both moving and
rotating separates into center-of-mass kinetic energy K and rotational energy U rot:
total energy = K + U rot = _ 12 M│v
WCM│2 + _ 12 I│ω
W│2
(C11.12)
• Purpose: This equation describes the total kinetic energy of an object’s particles due to the simultaneous motion of the object’s center of mass and its
rotation about that center of mass, where K is the object’s center-of-mass kinetic
energy (calculated as if it were a particle) and U rot is its rotational energy (calculated as if it were at rest). Here M is the object’s mass, v
WCM is the velocity of its
W
center of mass, I is its moment of inertia around its axis of rotation and ω
is its
angular velocity of rotation.
• Limitations: The idea that we can separate the total energy into kinetic and
internal parts applies quite broadly, but K = _ 12 M│v
WCM│2 and U rot = _12 I│ω
W│2 assume
that all particles in the object have speeds much less than that of light and
(in the last case) that the object rotates rigidly.
The section provides an overview of the proof. The proof indeed shows that this separation applies to all forms of internal kinetic energy, not just rotational energy.
Section C11.5: Rolling Without Slipping
This section argues that when an object rolls without slipping, its center-of-mass
­velocity is related to its angular velocity of rotation in a particularly simple way:
│v
W │
│v
WCM│ = R│ω
W│ ⇒ │ω
W│ = ______
CM
R
(C11.15)
W│ to its
• Purpose: This equation links a rolling object’s rotational angular speed │ω
radius R and its center-of-mass speed │v
WCM│.
• Limitations: This assumes that the object rolls without slipping.
The section then turns to analyzing the behavior of an object rolling without
slipping down an incline. Treating the rolling object as its own system, applying the
momentum requirement, and applying an analogous requirement based on conservation of angular momentum shows that the friction force that acts on such an object
only affects its rotational internal energy U rot, not any other form of internal energy.
This means that if we shift perspective to considering the system to be the rolling object and the earth, we can handle the internal contact interaction between the rolling
object and the earth by keeping track of U rot but otherwise ignoring that interaction.
Equations C11.12 and C11.15 then allow us to completely determine how much gravitational potential energy gets converted to K and U rot.
A commented example illustrates how we can apply the conservation of energy
checklist to a problem involving rolling without slipping.
171
172
Chapter C11
Rotational Energy
Figure C11.1
(a) A block of mass m slides from
rest down a frictionless inclined
track, going down a vertical
distance h. (b) A ball with mass
m rolls from rest without slipping
along a similar incline, going
down the same vertical distance.
The ball’s final speed is smaller
than the block’s final speed. Why?
Block, mass m
(a)
C11.1
A puzzle concerning the
behavior of a rolling object
How taking account of
rotational energy might
resolve the puzzle
vobj, f
(b)
h
vball, f
Introduction to Rotational Energy
Here is a puzzle. Figure C11.1a shows a block sliding without friction down a
straight inclined track. Figure C11.1b shows a ball with the same mass rolling
without slipping down a straight track inclined at the same angle. Assume
that both start from rest and move through the same vertical and horizontal distances. Since we can ignore the normal part of the contact interaction
between each object and the track in both cases, and since both objects have
the same mass and move through the same vertical distance, they must have
converted the same amount of gravitational potential energy to energy in the
object in each case. Therefore, they should have the same kinetic energy (and
thus speed) at the end, right? When we actually do this experiment, though,
we find that the rolling ball is moving significantly more slowly than the sliding block when they both reach the end of the track! How can this be?
Since energy must be conserved, something must be channeling gravitational potential energy into some other form of energy in the ball. Indeed, if
we compare the situations more closely, we see that the ball is rotating around
its center of mass when it reaches the end of the track, but the sliding block
is not. This rotation causes the ball’s constituent particles to move around
its center of mass as well as along with it. If there is energy associated with
this rotational motion in addition to the kinetic energy associated with the
motion of each object’s center of mass, it could explain the puzzle: during the
process, we must convert the same amount of gravitational potential energy
to energy in other forms in each case, but in the case of the sliding block, this
energy goes entirely to the block’s center-of-mass kinetic energy, while in the
block’s case this energy goes only partly to the ball’s center-of-mass kinetic
energy, the rest going to rotational energy. This would explain why the ball’s
center of mass is not moving as quickly at the bottom of the track.
To ensure this qualitative hypothesis does indeed solve the puzzle, we
need to know how to calculate the extra energy involved in the rotation, and
then verify that including this energy accounts for the entire observed difference in speed. The purpose of this chapter is to explore how we can calculate
the internal energy associated with an object’s rotation.
C11.2
The definition of rotational
energy
Ball, mass m
h
Rotational Energy of an Object at Rest
To start, let’s consider a rigid object whose center of mass is at rest but which
is rotating with some angular velocity ω
W about its center of mass. Since this
object’s center of mass is at rest, it has no center-of-mass kinetic energy,
but its constituent particles are moving, so they have some kinetic energy.
Because this energy is not associated with the motion of the object’s center of
mass, we consider it a form of internal energy U that we will call rotational
energy U rot. Note that the superscript “rot” here is not an exponent but rather
C11.2 Rotational Energy of an Object at Rest
173
just a label that indicates the kind of internal energy we are talking about.
(We will follow this convention with other forms of internal energy as well,
because we will find it convenient to write these important labels in such a
way that they don’t collide with subscript labels that indicate which object
the internal energy belongs to and so on.)
How might we link this energy to the object’s angular velocity ω
W? Let’s
divide the object up into its constituent particles. As figure C11.2 illustrates,
the arclength that the object’s ith particle moves as the object rotates through
an angle dθ is (by definition of the radian measure of angle) ds = ri dθ, where
ri is the distance that the particle is from the axis of rotation. Therefore, this
particle’s speed due to that rotation is
|dt| | dt |
│v
Wi│ = __
ds = ri ___
dθ = ri│ω
W│ (C11.1)
ω
Rigid
object
Reference
direction
θ
dθ
ri
mi ds
axis
The particle’s kinetic energy is therefore Ki = _ 12 mi│v
Wi│2 = _ 12 mi r 2i │ω
W│2. The object’s
total rotational energy is the sum of all these particle kinetic energies:
U rot = ∑ Ki = ∑ _12 mi r 2i │ω
W│2 = __
1 ∑ mi r 2i │ω
W│2
]
2 [ all i
all i
all i
(C11.2)
Note that the quantity in square brackets expresses a property of the object
that is independent of its rotational speed (for a rigid object, anyway). Indeed,
we called this quantity the object’s moment of inertia I in chapter C6. To review
what we learned there, this quantity depends on how mass is distributed in
the object, and can be written in the form I = αMR2, where M is the object’s
total mass, R is the largest value of ri (that is, the maximum distance that
any part of the object is from the axis of rotation) and α is a positive unitless
constant that approaches 1 when most of the object’s mass is near the object’s
rim at the distance R and approaches 0 when most of the object’s mass is near
the rotation axis.
So, to summarize,
U rot = _ 12 I│ω
W│2
where
I = ∑ mi r 2i = αMR2
(C11.3)
(C11.4)
Figure C11.2
Calculating the ith particle’s
rotation speed in a rigid rotating
object.
How to calculate an object’s
rotational energy
• Purpose: These equations specify the rotational internal energy U rot
W
that a rigid object rotating with angular velocity ω
contains. I is the
W
object’s moment of inertia around the rotation axis specified by ω
, mi
is the mass of the object’s ith particle, ri is the distance that particle is
from the axis, and the sum is over all particles. M is the object’s mass,
R is the maximal value of ri, and α is a unitless constant (0 ≤ α ≤ 1) that
depends on the distribution of mass within the object.
• Limitations: The object must be rigid (but need not be symmetric). All
particles must also move much slower than the speed of light.
• Notes: These equations assume that ω
W is expressed in rad/s.
Note that the formula for U rot has the same form as the particle kinetic energy
formula _12 m│v
W│2, except that I plays the role of m and ω
W plays the role of vW.
This provides an easy way to remember both this formula and the analogous
W for angular momentum: just remember that I and ω
formula L
W = I ω
W are to
W are to ordinary motion.
rotation what m and v
The similarity to the formula
for ordinary kinetic energy
Chapter C11
174
C11.3
The basic trick for calculating
moments of inertia
Example C11.1
Calculating Moments of Inertia
When we first saw moments of inertia in chapter C6, I simply gave you a
list of values of α for various kinds of common shapes. In this chapter, I will
show you how to actually calculate moments of inertia.
The actual number of elementary particles in any extended object is so
large that any literal application of equation C11.4 would be impractical. But
we can group the particles into a reasonable number of pieces (each small
enough that all its particles are at least approximately the same distance from
the rotation axis) and then sum over the pieces instead of over individual
particles. The following examples illustrate the process.
Problem: Consider a thin rod with mass M, length 2R, and diameter D << R.
Assume this rod rotates around an axis that is perpendicular to the rod and
goes through its center of mass (see figure C11.3). What is the rod’s moment
of inertia for rotations around this axis?
Axis of rotation
R
Rod,
mass M
D
Rotational Energy
Figure C11.3
Solution The trick here is to divide the rod into a countable number of pieces,
each embracing a set of particles all approximately the same distance from
the axis of rotation. Let’s divide the rod along its length into n equal pieces
of length ∆R = 2R/n, and number the pieces using an index j whose value
ranges from 1 to n. The mass of each piece compared to the rod’s total mass is
mj ΔR
ΔR
___ = ____
⇒ mj = M ____
M
2R
2R
A rotating rod.
(C11.5)
We can also express the distance rj that the jth piece’s center is from the axis as
a fraction of R. Let us define a unitless variable u such that
rj
uj ≡ __
⇒ rj = uj R
R
(C11.6)
Analogously, let’s define Δu ≡ ΔR/R. Now, if ∆R and D are both sufficiently
small, then rj will be approximately the distance that every particle in the jth
piece is from the axis of rotation. The rod’s total moment of inertia is thus
n
n
n
Δu (u R)2 = MR2 __
I ≈ ∑ mj r 2j =∑ M ___
1 Δu∑ u 2j
j
[2
]
2
j=1
j=1
j=1
Axis
0.9R
0.7R
etc.
0.2R
1 2 3 4 5 6 7 8 9 10
Value of j
R
Figure C11.4
Values for uj when we divide
the rod into ten pieces.
(C11.7)
Note that the quantity in brackets is a unitless number multiplying MR2, and
so corresponds to α in equation C11.4. The MR2 factor contains the units of I
and isolates the aspect of I that depends on the rod’s mass and length rather
than how its mass is distributed. This trick of defining the unitless variable u
also makes the sum easier to evaluate, as we will see.
To make the sum tractable (though a bit approximate), let’s take n = 10.
As figure C11.4 illustrates, the values of uj for n = 1 through 10 are 0.9, 0.7,
0.5, 0.3, 0.1, 0.1, 0.3, 0.5, 0.7, and 0.9, respectively, and ∆u = 0.2. Therefore
10
Δu∑ u 2j = ___
0.2 2 (0.9 2 + 0.7 2 + 0.5 2 + 0.3 2 + 0.12) = 0.330
2
j=1
(C11.8)
So I ≈ 0.33 MR2. One can use calculus to evaluate this sum in the limit
2
_1
that n W ∞ (see problem C11D.1): the result is I = 3 MR . So even with only
10 pieces, we are not far off. (Of course, even the result in the limit that
n W ∞ is approximate when the rod’s diameter D is nonzero!)
C11.3 Calculating Moments of Inertia
175
Example C11.2
Problem: Consider a uniform solid disk with mass M, radius R, and height
h. What is the disk’s moment of inertia for rotations around an axis perpendicular to the disk and going through its center (see figure C11.5)?
Solution In this case, we can divide the disk into n thin hoops with equal radial
thickness ∆r = R/n << R, one of which is shown shaded in figure C11.5. Note
that all the particles in such a hoop are approximately the same distance from
the axis of rotation as rj, the distance between the axis and the hoop’s middle.
The jth hoop’s volume is its circumference 2πrj times its radial thickness ∆r
times its height h. If the disk is uniform, then the hoop’s mass is to the disk’s
total mass M what the hoop’s volume is to the disk’s volume πR2h, so
mj (volume)j ________
2πrj Δr h
rj Δr
___ = _________
=
= 2 __ ___
⇒
2
2
M
πR h
πR h
mj = 2Muj Δu
R R
(C11.9)
where again I am defining a unitless variable u such that uj ≡ rj/R and ∆u ≡
∆r/R (note that h cancels out!). The disk’s moment of inertia is therefore
n
n
j=1
j=1
[
n
]
I ≈∑ mj r 2j = ∑ ( 2Muj Δu)(uj R)2 = MR2 2 Δu∑ u 3j
j=1
(C11.10)
Axis
R
∆r
rj
h
Hoop,
mass mj
Disk,
mass M
Figure C11.5
One hoop in a solid disk that
is rotating around an axis
perpendicular to its face and
through its center.
If we divide the disk into n = 10 hoops, then ∆u = 0.1 and the values of uj
are 0.05, 0.15, 0.25, …, 0.95 for j = 1, 2, 3, …, 10, respectively. The sum in the
square brackets (the value of α in equation C11.4) is therefore
10
α ≈ 2 Δu∑u 3j = 2(0.1)(0.05 3 + 0.15 3 + 0.25 3 + ⋯ + 0.95 3) = 0.4975 (C11.11)
j=1
So I ≈ 0.4975 MR2. One can use calculus to evaluate this sum in the limit that
2
_1
n W ∞ (see problem C11D.1): the result is I = 2 MR (this latter result is exact
for any value of h). So again, even with only 10 hoops, we are not far off.
Exercise C11X.1
Evaluate the sum in square brackets in equation C11.10 for n = 5 hoops
­instead of n = 10. If the exact answer is 1/2, how much smaller is the error
for the n = 10 result than the error for the n = 5 result?
I am much more interested that you get out of these examples a sense of
the process of calculating I (and in particular, that you understand the trick
of defining mj and rj in terms of a unitless variable) than I am the particular
results that we found. For easy reference, figure C11.6 lists values of α for
various common shapes (this is the same as figure C6.7 in chapter C6).
Hollow pipe or hoop
R
α≈1
Figure C11.6
Hollow ball
R
α ≈ 2/3
Solid disk or cylinder
R
α = 1/2
Solid sphere
Thin rod
R
α = 2/5
R
α ≈ 1/3
Values of α for various simple rotating shapes (assuming thin walls in the first two cases and a thin rod in the last).
176
Chapter C11
We can divide a complicated
object up into parts
Since any object’s moment of inertia is the sum of mi r 2i over all its particles, it follows that if we can divide a complicated object into pieces with
various moments of inertia I1, I2, …, the object’s total moment of inertia is
I = I1 + I2 + ⋯ (as long as each moment of inertia is evaluated for rotations
around the same axis), because the moment of inertia of each piece is simply
a portion of the sum of I for that object. For example, we can evaluate the
moment of inertia of a solid sphere by dividing it into disks of equal thickness
and summing the moments of inertia of these disks (see problem C11D.3).
C11.4
Rotational Energy
When an Object Both Moves and Rotates
Equation C11.3 tells us that when a rigid rotating object is at rest, its internal
W
rotational energy is U rot = _12 I│ω
│2. What about when it is moving and rotating? The result turns out to be simple: all we need to do is add the kinetic
energy of the object’s center of mass:
A moving and rotating object’s
energy nicely separates into
kinetic and rotational parts
An overview of the proof
total energy = KCM + U rot = _ 12 M │v
WCM│2 + _ 12 I │ω
W│2
(C11.12)
• Purpose: This equation describes the total kinetic energy of an object’s
particles due to the simultaneous motion of the object’s center of mass
and its rotation about that center of mass, where KCM is the object’s
­center-of-mass kinetic energy (calculated as if it were a particle) and U rot
is its rotational energy (calculated as if it were at rest). Here M is the
W CM is the velocity of its center of mass, I is its moment of
object’s mass, v
inertia around its axis of rotation and ω
W is its angular velocity of rotation.
• Limitations: The idea that we can separate the total energy into kinetic
and rotational parts applies quite broadly, but KCM = _ 12 M│v
WCM│2 and
1
rot
2
U = _2 I │ω
W│ assume that all particles in the object have speeds much
less than that of light and (in the last case) that the object rotates rigidly.
This is a beautiful but astonishing result. In an extended object that is both
moving and rotating, its particles’ velocities point in all kinds of different
directions and are constantly changing in very complicated ways. It is not at
all obvious that the sum over all particle kinetic energies should separate into
just these two simple terms.
However, equation C11.12 follows directly from the properties of the dot
product and the definition of the center of mass. Here is an overview of the
W i, where
proof. We can write the ith particle’s position in the form r W i = r W CM + q
r WCM is the position of the object’s center of mass and q
Wi is the ith particle’s
position relative to that center of mass. This means that the change in that parWi, which
ticle’s position during a tiny time interval dt must be d r Wi = d r WCM + d q
W i = d r Wi/dt = d r WCM/dt + d q
Wi /dt = v
W CM + u
W
W
Wi /dt
in turn means that v
i, where u
i ≡ d q
is that particle’s velocity relative to the object’s center of mass. Now, note that
│v
Wi│2 = v
Wi · v
Wi. Therefore, the sum over all particle kinetic energies is
WCM + u
WCM + u
∑Ki = ∑ _12 mi v
Wi · v
Wi = ∑_ 12 mi (v
Wi) · (v
Wi)
all i
all i
all i
_1
2
WCM · v
W CM + 2v
WCM · u
W
W
W
= ∑ mi (v
i + u
i · u
i)
all i
(C11.13)
where I have used the distributive and commutative properties of the dot
product in the final step. We can divide this into three separate sums:
C11.5 Rolling Without Slipping
177
WCM · u
∑Ki = ∑ _ 12 mi│v
WCM│2 + ∑ mi (v
Wi) + ∑ _ 12 mi│u
Wi│2
all i
all i
all i
all i
= _ 12│v
WCM│2 ∑ mi + v
WCM · ∑ miu
Wi + ∑ _ 12 mi│u
Wi│2
all i
all i
all i
(C11.14)
where in the last step, I pulled a common factor out in front of each sum.
Now, the sum over mi in the first term is simply the object’s total mass M, so
W CM│2. The
this term is simply the object’s center-of-mass kinetic energy _2 1 M│v
last term is simply the sum of the particles’ kinetic energies calculated as
W CM = 0, that is, the kinetic energies of the particles’ motions relative to
if v
the object’s center of mass. This term will correctly give the energy associated with all kinds of particle motions relative to the center of mass, including vibrations as well as rotations, but in the particular case where our
W
object is simply rotating rigidly, it reduces to U rot = _ 12 I│ω
│2, as discussed in
section C11.2.
We see, therefore, that equation C11.14 will reduce to equation C11.12
as long as the middle term in the former is zero. Here is an intuitive way of
­seeing that this term indeed must be zero. Note that we saw in chapter C4
W i = M v
WCM.
that as a consequence of the definition of the center of mass, ∑mi v
W
W
W
By analogy, we would expect that ∑mi u
i = M uCM, where u
CM is the velocity
of the center of mass relative to the center of mass. But the center of mass’s
velocity relative to itself should be zero! Therefore, the middle term in equation C11.14 is plausibly zero and equation C11.12 is true. (To see this last step
argued more rigorously, see problem C11D.5.)
The whole concept of internal energy U hangs on the fact that we can
separate the total kinetic energy of a system’s particles into a term (KCM)
that depends only on the system’s center-of-mass motion and a term (U) that
depends only on the system’s internal motions relative to that center of mass. If
the cross term in equation C11.14 were not zero, then an object’s total energy
would depend in a complicated way on how its center-of-mass motion connects with the internal motions of its particles, and the conceptual division
between center-of-mass kinetic energy and internal energy would not be
exhaustive and therefore much less useful. We are therefore blessed that the
universe makes our life simpler in this particular way!
Because such a separation always works, from now on I will drop the
“CM” subscript when referring to an extended object’s kinetic energy: K for
such an object will always mean the object’s center-of-mass kinetic energy.
Exercise C11X.2
What property of the dot product allows us to write the second term the way
that I did in the last line of equation C11.14?
C11.5
Rolling Without Slipping
The results in the previous sections allow us to apply conservation of energy
to situations where a ball or other object is rolling along a surface. Such a
situation is easiest to analyze if the object rolls without slipping. In such a
case, there is a simple fixed relationship between the object’s center-of-mass
W
W CM and its angular velocity ω
velocity v
.
To better understand this relationship, imagine we are rolling a cylindrical spool with thread wrapped around it along a tabletop so that as the
spool rolls forward, it leaves a trail of thread behind it (see figure C11.7).
The very concept of internal
energy depends on our ability
to separate internal KE from
center-of-mass KE
“K” for an extended object will
now always mean that object’s
center-of-mass kinetic energy
178
Figure C11.7
As the spool rolls forward, if it
does so without slipping, it must
leave behind a length of thread
between points A and B that is
equal to the arclength R ∆θ that
has been unwrapped from the
spool’s circumference.
Chapter C11
Rotational Energy
Arclength
R∆θ
Rolling
spool
∆θ
CM
Thread
R
sCM
A
B
Tabletop
“Rolling without slipping” in this case is the same as saying that as the spool
rolls, the thread is laid down at rest on the tabletop.
You can see from figure C11.7 that as the spool rolls forward from point A
to point B and turns through an angle ∆θ, it will lay down a length of thread
equal to the arclength R│Δθ│ along the spool’s circumference that the thread
previously occupied, where R is the spool’s radius. If the thread is at rest, this
must be equal to the distance s CM that the spool’s center of mass has moved
forward: s CM = R│Δθ│. If we divide both sides of this expression by the time
∆t that it takes the spool to move this distance, and note that │v
WCM│ = s CM/Δt
and │ω
W│ = │Δθ│/Δt, then we see that “rolling without slipping” means that
The relationship between
center-of-mass velocity and
angular velocity for an object
that rolls without slipping
An argument that ∆U = ∆U rot
for a ball rolling down an
incline
How we know that the contact
interaction exerts a frictional
force on the rolling ball
The contact interaction does no
work on the rolling ball
│v
WCM│ = R│ω
W│ │v
W │
⇒ │ω
W│ = ______
CM
R
(C11.15)
• Purpose: This equation links a rolling object’s rotational angular
W│ to its radius R and its center-of-mass speed │v
WCM│.
speed │ω
• Limitations: This assumes that the object rolls without slipping.
Now consider a ball of mass M, radius R, and moment of inertia I that
starts from rest and rolls without slipping a distance D down an incline in
the earth’s gravitational field (see figure C11.8). We can look at this situation
either by considering “the system” to be just the ball, or by considering it to
be the ball and the earth. Each approach offers unique advantages.
We can use the “just the ball” perspective to see that the rolling process
cannot affect any form of the ball’s internal energy other than U rot. Here’s how.
The ball participates in an external gravitational interaction with the earth
and a contact interaction with the incline. This contact interaction exerts both
a normal force F
WN on the ball and a frictional force F
WF. How do we know that
friction must be present? (1) Suppose the incline were frictionless: then the
ball would simply slide down the incline without rotating. Friction forces
between two surfaces (by definition!) seek to oppose the relative motion of
those surfaces, so whatever force keeps the ball’s surface locked to the incline
so that the ball rolls without slipping must be a friction force. (2) Moreover,
we see experimentally that a rolling ball moves more slowly than a frictionless block sliding on the same incline, so the ball must experience some force
from its contact interaction with the incline that opposes its motion—that is,
a force that acts up the incline, parallel to the incline’s surface, a force that the
sliding block does not feel. Again, the force’s direction (and its absence in the
frictionless block situation) indicates it is a friction force.
What work do these forces do on the rolling object? Both the normal
force and the frictional force exerted by the contact interaction act on the
point where the ball touches the incline. But since the ball is rolling without
C11.5 Rolling Without Slipping
179
Ball, mass M,
radius R, moment
of inertia I
D
(Ball
at rest)
∆rCM
Incline
Figure C11.8
The external forces that act on a
ball rolling down an incline.
FF
FN
θ
(ω points
away from us)
ϕ
vCM
ϕ
Fg
slipping, the particles on the ball’s surface that actually touch the incline are
necessarily at rest the entire time they are in contact with the incline (if they
were not at rest, the ball would be slipping!). Since these particles undergo
zero displacement while the contact forces act, neither aspect of the external
contact interaction does any work on the rolling ball.
On the other hand, the gravitational interaction does do some work
because the ball’s motion is at least partially downward. The gravitational
force is constant and behaves as if it were exerted at the center of mass. Note
also that │ΔrWC M│ = D. Therefore, the total work done on this system is
Wg = F
Wg · Δr WCM = │F
Wg││Δr WCM│cos θ = M│g
W│D cos θ
Calculating the gravitational
work done on the ball
(C11.16)
where θ is the angle between the vertically downward gravitational force F
Wg
and the displacement ΔrWCM down the incline (see figure C11.8). Conservation
of energy tells us that the change in the system’s energy E must be equal to
the energy that flows in across its boundary:
M│g
W│D cos θ = Wg = ΔE = ΔK + ΔU rot + U oth
(C11.17)
where ∆K, ΔU rot, and ΔU oth are the changes in the ball’s center-of-mass kinetic
energy, rotational energy, and other forms of internal energy, respectively.
We can determine how much energy goes to each of the energy categories
on the right side by deploying the momentum requirement and an analogous
requirement that is imposed by conservation of angular momentum. Since
W
W
W
W
all the forces acting on the ball are constant, and F
ext = F
g + F
N + F
F here, the
momentum requirement says that
Implications of the momentum
requirement
ΔK = F
Wext · Δr WCM = F
Wg · Δr WCM + F
WN · Δr WCM + F
WF · Δr WCM
= M │g
W│D cos θ + 0 − │F
WF│D
(C11.18)
W
W
because F
N is perpendicular to Δr WCM and F
F is opposite to Δr WCM. You can show
that combining equations C11.17 and C11.18 implies that
ΔU rot + ΔU oth = │F
WF│D
(C11.19)
Exercise C11X.3
Show that equation C11.19 follows from equations C11.17 and C11.18.
We can use methods developed in chapter C7 (see problem C11D.6) to
show that in this case, conservation of angular momentum requires that
ΔU rot = │F
WF│D ⇒ ΔU oth = 0!
(C11.20)
What conservation of angular
momentum requires
180
When the system is the earth +
ball, we can ignore the internal
contact interaction
Chapter C11
Rotational Energy
Therefore, we can conclude from this analysis that whenever an object rolls
without slipping down an incline, then (1) only the gravitational interaction
causes the ball’s energy to change and (2) no energy is channeled to forms
other than K and U rot. This means that the only effect of the incline is to channel some of the gravitational interaction’s energy to U rot.
With this in mind, we can step back and take the system to be the ball
and the earth (considering the incline to be part of the earth). The gravitational interaction between the ball and the earth and the contact interaction
between the ball and incline now become internal interactions. We can handle
the gravitational interaction by keeping track of its potential energy. We have
seen that the contact interaction does no work on the ball, and we also know
that the contact interaction between the ball and incline does no significant
work on the incline and earth because the earth remains essentially at rest
during the process. Therefore, this interaction does not cause energy to flow
from the ball to the earth or vice versa. This means that though this contact
interaction does require us to keep track of the ball’s rotational energy, we can
handle it by otherwise ignoring it.
Let Ki and Kf be the ball’s initial and final (center-of-mass) kinetic energies, and let Kei and Kef be the same for the earth. Let zi and zf be the ball’s
initial and final vertical positions. Any internal energy U oth in the ball other
than its rotational energy does not change, and the same goes for all forms of
the earth’s internal energy Ue. The master conservation of energy equation in
this case thus tells us that
⏞ ⏞
0
0
⏞
⏞
0
0
oth
oth
i+ U rot
K
@
+K
ei + Ue + Vg(zi) = Kf + U rot
@
+K
ef + Ue + Vg(zf)
i + U
f + U
⇒ M│g
W│ zi = _ 12 M│v
WCM│2 + _ 12 I│ω
W│2 + M│g
W│zf
(C11.21)
where v
WCM is the ball’s final center-of-mass velocity and ω
W is its final angular
velocity. We can write I in the form αMR2 and substitute │v
WCM│/R for │ω
W│ as
long as the ball rolls without slipping (see equation C11.15). Doing this yields
│v
W │2
@
M│g
W│(zi − zf) = _ 12 M│v
WCM│2 + _ 12 αM R
2 ______
CM ⇒ 2│g
W│(zi − zf ) = │v
WCM│2 (1 + α)
R
@2
___________
W│D sin ϕ
2│g
⇒ │v
WCM│ = ___________
1+α
Why a sliding object is able to
move more quickly
How to treat the contact interaction in a rolling-withoutslipping problem
(C11.22)
where in the last step, I used the fact that zi – zf = D sin ϕ (see figure C11.8).
For an object that slides without friction, the analysis would be the same
except there would be no rotational energy term and therefore no α in the
denominator of equation C11.22. We see therefore that if a block slides without friction a distance D down an incline tilted at angle ϕ, it should have a
larger center-of-mass velocity at the end than a ball would when it rolls without slipping the same distance down an incline tilted at the same angle, and
equation C11.22 quantitatively tells us how much more slowly the ball rolls.
This analysis explains the qualitative puzzle that opened the chapter and is
also consistent with experimental results.
The following commented example illustrates another application of the
approach where we take the system to be the rolling object and the earth.
In such cases, I recommend that when you declare the contact interaction
between the earth and object in your list of internal interactions, you simply
write “U rot” next to it, to remind yourself that from an energy point of view,
the only thing that this interaction requires is that you keep track of the rolling object’s rotational energy: it does not affect any other form of energy in
either the earth or the rolling object.
C11.5 Rolling Without Slipping
181
Problem: A cylindrical hoop with a mass of 2.5 kg and a radius of 0.50 m
rolls from rest down a hill that is 25 m tall vertically. How fast is the hoop’s
center of mass moving at the bottom of the hill? How fast (in revolutions per
second) is the hoop rotating?
Solution Initial and final diagrams for this situation appear below.
Initial:
Final:
Initial and final
diagrams
z
zi
Hoop, at rest:
vi = 0, ωi = 0
Knowns and
unknowns:
Symbol
definitions
Hill
m = 2.5 kg
List of internal interacR = 0.5 m
tions with a description
zi = 25 m
of how each is handled
zf = 0
Internal Interactions
• Gravitational: Vg = m|g| z
|g| = 9.8 m/s2
• Contact with hill:
|vf| = ?
(Rotational
velocity ωf
points away
from us)
zf
Urot
0
The system here is the hoop and the earth (the hill being part of the earth). This
system is isolated because it floats in space. The only internal interactions are
the gravitational interaction between the hoop and earth (which we can handle using the approximate potential energy function Vg = m│g
W│z because the
hoop is always near the earth’s surface) and the contact interaction between
the hoop and hill, which we can ignore except that we have to keep track of
the hoop’s rotational energy U rot = _ 12 I│ω
W│2, where I is the hoop’s moment of
inertia. As long as drag and sliding friction are negligible, other forms of the
hoop’s internal energy U oth and all forms of the earth’s internal energy Ue will
remain unchanged. Also, because the earth is so massive compared to the
hoop, its initial and final kinetic energies Kei and Kef are both nearly zero. The
master equation for conservation of energy in this situation is therefore
⏞
0
_1
2
⏞
⏞
0
_1
2
⏞
0
⏞
@
m│
v
Wi│ + I│
ω
Wi│ + U
+K
ei + Ue + m│g
W│zi
2
2
oth
≈0
0
oth
= _ 12 m│v
Wf│2 + _ 12 I │ω
Wf│2 + U
@
+K
ef+ Ue + m│g
W│z f
│v
Wf│
(C11.23)
)
(
15.7 m/s
rad
│ω
Wf│ = ____
= ________
= 31.4 ____
0.5 m
s
R
)
How system is isolated, with justification
System description
Discussion of how
internal interactions
will be handled
Approximations and
assumptions stated
More symbol
definitions
Since I = mR2 for a hoop (see figure C11.6) and since │ω
Wf│ = │v
Wf│/R if the hoop
rolls without slipping, the above becomes
_____
│v
Wf│2
@2 _____
m│g
W│zi = _ 12 m│v
Wf│2 + _12 m R
⇒ │v
Wf│2 = │g
W│zi ⇒ │v
Wf│=
│g
W│zi
@2
R
_____________
m2 (25 m) = 15.7 __
│
│
W
⇒
v
f =
9.8 __
m
(C11.24)
s
s
(
Definition of a coordinate axis (useful here
because we are using
the near-earth gravitational potential energy
formula)
vf
Hoop, mass m,
radius R
|ωf| = ?
Example C11.3
1 rev
rev
______
= 5.0 ___
(C11.25)
s
2π
rad
(Note that I chose the positive square root in equation C11.24 because a speed
must be positive.) Both results have the right units and seem plausible.
Master
equation
Algebra with
symbols
Calculation includes
and tracks units
Final check of
plausibility
Chapter C11
182
Rotational Energy
TWO-MINUTE PROBLEMS
C11T.1 A given object always has a specific moment of inertia I, independent of the axis around which it rotates (as
long as the axis goes through the object’s center of mass).
T or F?
C11T.2 Which of the six objects shown below has the largest rotational energy? (All have the same mass.)
2
3R
R
ω
Disk
R
ω
Hoop
A
C
1
2R
5
4R
ω
2ω
Cylinder
Hollow ball
D
Solid ball
B
R
3ω
4
5ω
4
E
Thin rod
F
a certain fixed line, how will your hand’s speed as it moves
compare to R│ω
W│, where R is the spool’s radius and │ω
W│ is
angular speed?
A. The hand’s speed will be greater than R│ω
W│.
B. The hand’s speed will be less than R│ω
W│.
C. The hand’s speed will be equal to R│ω
W│.
D. The hand’s speed has nothing to do with R│ω
W│.
C11T.7 Suppose we launch a disk so it rolls without slipping up an incline. The disk of course slows down as it
moves up the incline. But in what direction does the friction force acting on the disk point?
A. Up the incline
B. Down the incline
C. In some other direction (specify)
D. The friction force is zero in this case.
C11T.8 As the disk rolls up the incline in the situation
described in the previous problem, the friction force acting
on the disk does
A. positive work on the disk.
B. negative work on the disk.
C. no work on the disk.
C11T.3 Two wheels have the same total mass M and radius R.
One wheel is a uniform disk. The other is like a bicycle
wheel, with lightweight spokes connecting the rim to a
small hub. Which likely has the larger moment of inertia?
A. The solid disk.
B. The wheel with spokes.
C. The moment of inertia will be nearly the same for both.
D. We need more information to answer.
C11T.9 Suppose we put a ball at rest on a rug and then start
pulling the rug out from under the ball in a certain direction. The ball rolls without slipping on the rug as the rug
moves under it. The friction force that the contact interaction between the rug and ball exerts on the ball does
A. positive work on the ball.
B. negative work on the ball.
C. no work on the ball.
C11T.4 Suppose we take a disk of radius R and remove the
material from r = 0 to r = _ 12 R, making a hole at the center
of the disk. Note that this decreases the mass of the disk.
Will the value of α for the new object be larger, smaller, or
the same as that for the original object?
A. The value of α will be larger for the new object.
B. The value of α will be smaller for the new object.
C. The value of α is the same for both objects.
D. We need to know the disk’s thickness to answer.
C11T.10 A solid ball and a hollow ball are released from rest
at the top of an incline and roll without slipping to the
­bottom. Which reaches the bottom first?
A. The solid ball.
B. The hollow ball.
C. Both will arrive at the same time.
D. The result depends on the balls’ relative masses.
E. The result depends on the balls’ relative radii.
F. The result depends on the ball’s relative masses and
their relative radii.
C11T.5 Suppose we take a disk of radius R and remove the
material from r = _12 R outward. Note that this decreases
both the disk’s mass and its radius. Will the value of α for
the new object be larger, smaller, or the same as that for the
original object?
A. The value of α will be larger for the new object.
B. The value of α will be smaller for the new object.
C. The value of α is the same for both objects.
D. We need to know the disk’s thickness to answer.
C11T.11 Various objects are released from rest at the same
time and vertical position and roll without slipping along
an incline. (a) Which will reach the bottom first? (b) Which
will reach the bottom last?
A. A solid ball
B. A hollow ball
C. A cylinder
D. A piece of pipe
E. We need to know the radius and mass of each.
C11T.6 Suppose you have a spool of thread that can rotate
around a fixed axis as you pull thread off it. If you pull the
thread with your hand so that the thread always lies along
C11T.12 An isolated star collapses so that its radius is half its
original radius. Both its angular momentum and its rotational energy must be conserved. T or F?
Homework Problems
183
HOMEWORK PROBLEMS
Basic Skills
C11B.1 A solid cylinder of iron with a radius of 20 cm, a height
of 20 cm and a mass of 200 kg rotates at a rate of 10 rev/s
around its symmetry axis. What is its rotational energy?
C11B.2 Consider the rotating earth.
(a) Estimate the earth’s rotational energy assuming that
the earth is a uniform solid sphere.
(b) Compare this rotational energy to the earth’s orbital
kinetic energy. (The earth moves at a speed of 30 km/s
in its orbit around the sun.)
(c) The earth is actually not a uniform sphere, but is
denser at its center than at its surface. Does this make
the estimate that you made in part (a) too large or too
small? Explain your reasoning.
C11B.3 Repeat the calculation in example C11.1 with the
rod divided into 20 equal pieces, and show that the result
is even closer to 1/3.
C11B.4 Repeat the calculation in example C11.2 with the
disk divided into 20 rings, and show that the result is even
closer to 1/2 than 0.4975.
C11B.5 In the calculation of the moment of inertia of a rod
discussed in example C11.1, I commented that the rod had
to be “thin.” Explain why the calculation would be inaccurate if the rod were, say, half as thick as it is long.
C11B.6 A 6-kg bowling ball whose radius is 12 cm rolls
away from you without slipping at 4 m/s.
(a) What is the magnitude and direction of the ball’s anguW
lar velocity vector ω
?
(b) What is the ball’s rotational energy?
(c) What is its total energy K + U rot?
C11B.7 A 20-kg piece of steel pipe that is 20 cm in diameter,
80 cm long, and 1 cm thick is rolling toward you at a speed
of 3.0 m/s.
(a) What is the magnitude and direction of the pipe’s
W
angular velocity vector ω
?
(b) What is the pipe’s rotational energy?
(c) What is its total energy K + U rot?
C11B.8 Calculate the total energy K + U rot of a rod of mass
M and length L constrained to rotate with an angular
W
velocity of ω
around one of its ends. (Hint: Treat the rod as
an object whose center of mass is moving and which is also
rotating around that center of mass. How fast does the rod
rotate around its center of mass in this situation?)
Modeling
C11M.1 Calculate the moment of inertia of a wheel of total
mass M and radius R constructed as shown in the figure
below for rotations around an axis perpendicular to the
drawing and going through the wheel’s center. Assume
the wheel’s spokes and its circumference are made of an
iron rod with the same square cross section.
R
Iron rod
Wheel,
mass M
(Hints: Break the wheel down into three parts, two rods
and a hoop, that all rotate around the same central axis.
What portion of the wheel’s mass is in each part? Assume
that the rod is “thin.”)
C11M.2 A typical neutron star (what is left behind when a
star goes supernova) has a mass of 1.4 solar masses and a
radius of 12 km. Just after formation, a neutron star typically spins at about 500 rev/s.
(a) Estimate the total rotational energy of such a neutron star. (Be sure to describe any approximations or
assumptions you make.)
(b) If this energy were somehow extracted and converted
to other forms of energy at the same constant rate at
which the sun radiates energy (3.9 × 1026 W), how long
would it take the neutron star to spin down to zero
angular speed?
C11M.3 You have a spool of thread. Suppose you hold
one end of the thread and then drop the spool. What is
the spool’s speed after it has fallen a vertical distance h?
You may assume that the thread is essentially massless
compared to the spool and that the spool rotates around
a consistent axis and unrolls the thread cleanly. Describe
any other approximations and/or assumptions you make.
C11M.4 In the first scene of the movie Raiders of the Lost Ark,
archeologist Indiana Jones inadvertently trips a booby
trap and is chased out of a cave by a large spherical rolling
stone (you can find the scene on YouTube). If the stone is
rolling at 15 mi/h (about as fast as a normal human can
run), what minimum vertical distance must it have rolled
down before confronting Jones?
C11M.5 A cylindrical section of a tree trunk 50 cm in diameter and 75 cm long is seen rolling down a road below a
sawmill at a speed of 12 m/s. The road has a steady incline
of 5% (meaning that if you travel 100 m along the slope of
the road, you go down 5 m). Assuming that the log started
at the sawmill, at least how far is the sawmill up the road?
Chapter C11
184
Rotational Energy
C11M.6 A bicyclist coasts from rest down a hill. The rider
and cycle together have a mass M, and each wheel has a
mass m = M/50 and an α of 2/3.
(a) Assuming no friction, what is the cyclist’s speed after
going down a vertical distance h?
(b) What fraction of the bike and rider’s total energy of
motion is rotational energy in the wheels?
C11M.7 Imagine wrapping a length of thread many times
around a steel disk of mass M and radius R that is free
to rotate around a fixed, frictionless, horizontal axle. The
end of the thread is connected to a small object of mass m.
Suppose we hold the small object at rest and then release it
so the situation is as shown in the diagram below after the
mass has fallen a vertical distance h.
R
Disk,
mass M
Thread
h
Object, mass m
vf
(a) What is the value of │v
Wf│? Express your answer in terms
of M, R, m, h, and │g
W│, and describe any approx­imations
and assumptions you make.
(b) Check that your answer has the right units and makes
sense in the limits that M >> m and m >> M.
Derivations
C11D.1 (Requires basic integral calculus.) One can calculate
the value of α in an object’s moment of inertia using calculus as follows. Note that in both examples C11.1 and C11.2,
the sum for α has the form
n
α =∑ f(uj) Δu
(C11.26)
j=1
where f(uj) is some function of uj . In the limit that ∆u
becomes very small (n becomes very large), we can
approximate the sum by an integral
n
1
α = ∑ f (uj) Δu
W ∫ f (u) du
j=1
0
(C11.27)
(Note that the smallest possible value of u ≡ r/R is zero
and the largest possible value of u is 1.) So to calculate a
moment of inertia using calculus, follow the general procedure in examples C11.1 and C11.2 and at the last minute
replace the sum over uj by an integral over u.
(a) Do this for the case of the rod in example C11.1. Note
that in this case, if we integrate from u = 0 to u = 1, we
only get one arm of the rod, so double the integral to
cover both arms. You should get 1/3.
(b) Do this for the case of the disk in example C11.2. In this
case, the integral from u = 0 to u = 1 covers all the possible hoops. You should get 1/2.
C11D.2 Use an approach similar to that used in example
C11.2 to find α for a disk with a hole in the center of
radius _ 12 R. You may either divide the region between _ 12 R
and R into 10 pieces or use the calculus-based method outlined in problem C11D.1. In each case, however, note that
you will have to adjust the formula for the ratio mj/M if the
modified disk’s total mass is to remain M. Compare to the
theoretical value α = 5/8.
C11D.3 (Challenging.) Calculate the value of α for a uniform solid sphere. (Hints: Define the x axis to coincide with
the axis of rotation, with x = 0 at the sphere’s center. Divide
the sphere into a series of disks perpendicular to this axis,
each with the same thickness ∆x. Draw a p
­ icture and argue
that the radius of the jth disk is r 2j = R2 − x 2j , where R is
the radius of the sphere and xj is the position of the disk’s
center. Also argue that mj/M = _ 34 r 2j Δx/R3. You may either
use the calculus-based method outlined in problem C11D.1
or divide the sphere into 20 disks to calculate your result.)
C11D.4 Here is a clever way to evaluate the moment of inertia I of a hollow ball of mass M and radius R. Since moments
of inertia for composite objects add, we should have I1 =
I + I2, where I1 is the moment of inertia of a solid sphere with
density ρ and radius R and I2 is the same for a solid sphere
with the same density but a smaller radius R − ∆R.
(a) Show that if we throw away terms of order (∆R/R)2
compared to terms of order ∆R/R, then
(
)
ΔR
I = I1 − I2 = __
2 [ __
4 πρR5 5 ____
5 3
R ]
(C11.28)
(Hint: As you can find online or using WolframAlpha,
(1 − x)5 = 1 − 5x + 10x2 − 10x3 + 5x4 − x5.)
(b) If ∆R is very small, then the mass of the hollow ball is
M = (4πR2 ΔR)ρ (the volume of a thin spherical shell
times the density ρ). Use this and the above result to
show that I = _ 23 MR2.
C11D.5 Here is a more rigorous way to prove that the middle
W CM · ∑mi u
term v
Wi in equation C11.14 is zero. Note that above
W
W
equation C11.13 we defined u
i in such a way so that u
i =
v
Wi − v
WCM. Substitute this into ∑mi u
Wi and use the fact that a
WCM (as we saw in
system’s total momentum is equal to Mv
chapter C4) to prove that ∑mi u
Wi = 0.
W]/dt
C11D.6 In chapter C7, we saw that the torque τ
W ≡ [d L
W
around the origin point O that an external force F
exerts on
W , where rW is the position of the
an object is given by rW × F
point where the force is applied relative to the origin. In
the situation of an object rolling down an incline discussed
in section C11.5, the friction force F
WF on the rolling object
therefore exerts a torque on the object (around its center
of mass) whose magnitude is │τ
W│ = R│F
WF│. This is the only
torque acting on the object, and (as you can check with your
right hand) is in the same direction as the rolling object’s
angular momentum L
W, so during a tiny time interval dt,
Answers to Exercises
185
this force must therefore increase the object’s rolling anguW such that
lar ­momentum (around its center of mass) by d L
W│ = │τ
│ d L
W dt│ = R│F
WF│dt. Assume the object is symmetric
W = I ω
W, where ω
W
and has moment of inertia I, so that L
is
│
│
W
its angular velocity. Also note that ω
= │ dθ/dt│, where dθ
is the angle through which the object rotates in time dt. Put
all this together to determine the change in │ω
W│2 during dt
2
(discarding terms proportional to dt as negligible) and
from that show that
dU rot = _ 12 I d(│ω
W│2) = │F
WF││ds│
(C11.29)
where │ ds│ is the distance the ball rolls down the incline
in time dt. (Since F
WF is constant, it follows from this that
if the ball rolls from rest a distance D down the incline,
the ball’s change in rotational energy, and thus its final
rotational energy is U rot = │F
WF│D, as claimed in equation
C11.20.)
Rich Context
C11R.1 Suppose you are replacing a tire on your old clunker
of a car on a steep hill in San Francisco, and somehow your
spare tire gets away and rolls down the hill.
(a) Spare tires in older cars often amounted to being simply a replacement wheel, with a full-sized steel inner
wheel (or “rim”) about two-thirds the radius of the
whole surrounded by a normally inflated rubber tire
of roughly the same mass. The rim itself is like a hoop
surrounding a disk. Roughly estimate the spare tire’s
moment of inertia, and explain your reasoning.
(b) If the hill has an incline angle of 14°, about how fast is
the tire moving when it reaches the intersection 85 m
away (as measured down the slope)?
(c) Will this tire likely represent a hazard to pedestrians?
Support your conclusion with some quantitative estimates and comparisons.
C11R.2 Two kids enter unpowered homemade carts in
a soapbox derby race. The two carts have the same total
mass M (including the wheels) and four wheels, each with
a mass of __
201 M. The only significant difference between
the cars is that one has solid, disk-like wheels, and the
other has bicycle-like wheels with α = _23 (that is, they have
a greater proportion of their mass near the rim). They
travel the same distance from start to finish down the same
inclined track.
(a) Other things being equal, which cart wins and why?
(b) Suppose that it takes the faster cart 52.00 s to complete
the race. How much longer will the slower cart take?
(Hint: Show that at every point along the track, the
carts’ speeds are related by a fixed factor, if we ignore
air friction.)
C11R.3 You are the director’s assistant for a new action
movie. In a certain scene, a truck carrying empty steel
barrels swerves to avoid crashing with the hero’s speeding car. This dumps the barrels onto the sloping highway,
some of which roll downhill in the same direction as the
car. The director wants the barrels, which start essentially
at rest (and which have a length-to-radius ratio of 3), to
eventually catch up to and pass the car, which is traveling
at a constant speed of 70 mi/h. The road has a nearly constant 10% slope (that is, for every 10 meters you go along
the road surface, you go down 1 meter). It is important to
know roughly where to place the cameras needed to film
this scene. How far down the road will the barrels have to
roll to catch up to the car? (Hints: Assume that each barrel consists of a hoop with two end-caps, all constructed
of steel with the same thickness. You will find that α
for a barrel will depend on that length-to-radius ratio.
Also note that for the barrel to travel the same distance
as the car does in a given time interval, the barrel’s average speed during that interval must be equal to the car’s
speed. Calculating this average speed can be tricky, but in
this specific case, if friction interactions (other than that
which causes the barrel to roll) are negligible, then math
we will learn in unit N implies that the barrel’s average
speed will be simply one-half the sum of its initial and
final speeds, as you might think.)
ANSWERS TO EXERCISES
C11X.3 Substituting equation C11.18 into C11.17 yields
C11X.1 You should find that the result for n = 5 is
M│g
W│D cos θ = M│g
W│D cos θ −│F
WF│D + ΔU rot + U oth(C11.31)
2(0.2)(0.13 + 0.3 3 + ⋯ + 0.9 3) = 0.49
If we compare this to the result for n = 10, which is 0.4975,
we see that the error for n = 10 is about 4 times smaller
than that for n = 5.
C11X.2 The distributive property of the dot product allows
us to say that
WCM · m1w
v
W1 + v
WCM · m2w
W2 + ⋯
= v
WCM · (m1w
W1 + m2w
W2 + ⋯)
(C11.30)
If we cancel M│g
W│D cos θ from both sides and move the
│F
WF│D term to the other side, we get
│F
WF│D = ΔU rot + U oth
This is equation C11.19.
(C11.32)
C12
Thermal Energy
Chapter Overview
Introduction
This chapter discusses thermal energy, the first truly “hidden” form of internal energy
we will consider. Knowing about thermal energy will enable us to apply conservation of energy to a broader range of contact interactions, including friction, impact,
and thermal contact interactions. The material in this chapter is essential background
for the remaining chapters in the unit, as well as for unit T, and also provides deep
background for the rest of the course.
Section C12.1: The Case of the Disappearing Energy
In many everyday processes (for example, a book sliding on a tabletop), energy seems
to disappear. This stumbling block prevented physicists from discovering the law of
conservation of energy for more than 150 years after Newton.
Section C12.2: Caloric Is Energy
The key to solving this puzzle lay in recognizing that an object’s temperature is related
to a hidden form of energy we now call thermal energy. In the 1700s and early 1800s,
people working in the area of thermal physics thought that an object’s temperature
reflected how much of a hypothetical fluid called caloric it contained. The calorie
(abbreviation: cal) was the amount of caloric needed to increase the temperature of
1 g of water by 1°C. Experiments done in the early 1800s established that caloric was
­actually a form of energy, with 1 cal = 4.186 J. In the 1840s, the physics community
came to understand that disappearing energy is really being transformed into thermal
energy, conserving energy.
Section C12.3: Thermal Energy as Microscopic Energy
We now know that thermal energy is simply the total kinetic energy associated with
random molecular motions and the total potential energy of intermolecular interactions. Under normal conditions, an object’s temperature T is linked to an object’s
average molecular kinetic energy by
Kavg (per molecule) = _ 32 kB T
(C12.4)
where T is measured in the SI unit of kelvins from absolute zero (where all molecular
motion ceases), and kB is Boltzmann’s constant 1.38 × 10-23 J/K. The kelvin is defined
so that temperature differences of 1 K and 1°C are equivalent (the only difference
between the Kelvin and Celsius scales is the zero point: 0 K ≡ -273.15°C).
Only the kinetic energy of an object’s molecules is linked in a simple way to its
temperature T. An object’s total thermal energy is usually a complicated function of T.
Section C12.4: Friction and Thermal Energy
As an object slides on a surface, molecules on the contacting surfaces entangle, get
pulled out of position, and then snap back into position as the surfaces move relative to each other. This leaves these molecules vibrating more violently, so the process has converted some of the object’s energy of motion to molecular vibrational
186
energy. ­Similarly, collisions between objects can leave molecules in both vibrating
more ­violently. This simplified model explains how such contact interactions transfer
energy to thermal energy.
Section C12.5: Heat, Work, and Energy Transfer
Internal energy U is the total energy that an extended object contains within the
boundary defining its surface. We can keep track of changes in U by monitoring the
energy flowing through that boundary. Heat Q is energy that flows across an object’s
boundary driven by a temperature difference between what is inside and what is outside. Work W is any energy that flows across the boundary due to an interaction that
exerts a force. We will denote other forms of energy flowing across the boundary with
the symbol [E] (we’ll talk about such flows more in the next chapter). Conservation of
energy implies that for a multiobject system
ΔKtot + ΔUtot + ΔVtot = W + Q + [E]
(C12.6)
where Ktot and Utot are the sum of the (CM) kinetic energies and internal energies,
respectively, of the system’s macroscopic parts, and Vtot is the total potential energy
for interactions between those parts. If the system is a single object at rest, then this
reduces to ΔU = W + Q + [E], which physicists call the first law of thermodynamics.
Formally, an object’s thermal energy U th is the part of that object’s internal energy
that varies with temperature. Carefully note that heat is an energy flow across an object
boundary, whereas thermal energy is energy enclosed by that boundary. An object can
absorb heat, but it never contains heat!
Section C12.6: Specific “Heat”
An object’s thermal energy is generally a complicated function of temperature, but for
relatively small temperature changes not too close to temperatures where an object
changes phase from solid to liquid or liquid to gas, we have
dU th = Mc dT
(C12.10)
• Purpose: This equation connects a small change in an object’s thermal energy
dU th with a small change dT in its temperature T, where M is the object’s mass
and c is a substance-specific constant that we call the substance’s specific
“heat.” (Don’t confuse c with the speed of light!)
• Limitations: The temperature change dT must be small enough that c is
approximately constant over the temperature range.
The quotation marks in the term specific “heat” are my way of indicating that
“heat” is a complete misnomer here: c really should be called specific thermal energy.
Section C12.7: Problems Involving Thermal Energies
Keeping track of thermal energies enables us to solve energy problems involving:
1. Impact or friction interactions that do work on objects in the system or
2. Thermal contact interactions that transfer heat between objects.
To handle each such interaction, we add a term to our conservation-of-energy equation for each object involved.
We can use categories like those we used for conservation of momentum problems to characterize the degree to which a system is isolated. A system is momentarily
isolated if there is not enough time for much external energy to flow into or out of
the system. Systems are functionally isolated if external interactions exist but do no
work, cause no heat to flow, and don’t cause other kinds of energy to cross the system
boundary. This will be true for heat flows if the system’s temperature is the same as
that of its surroundings or it is surrounded by some kind of thermal insulator that
prevents heat from flowing. “Floating in space” no longer guarantees isolation.
187
188
Chapter C12
C12.1
Many natural processes seem
to destroy energy
Thermal Energy
The Case of the Disappearing Energy
Newton himself recognized that momentum was conserved when he proposed his theory of mechanics in 1686. However, it took another 150 years for
the physics community to realize that energy was also conserved. Why? The
main stumbling block was that many everyday physical processes involving
macroscopic objects seem to destroy (or, more rarely, create) energy.
Consider, for example, a book sliding along a flat, horizontal ­tabletop. The
W
gravitational force F
g on the book is downward, perpendicular to its motion,
and the contact interaction between the book and the table exerts a normal
W
force F
N that is also perpendicular to the book’s motion, as well as (­generally)
a sliding friction force F
WF that is opposite to its direction of motion. The
momentum requirement therefore tells us that
W
WF + F
W
W
W
dK = F
ext · dr WCM = (F
N + F
g) · dr WCM = F
F · dr WCM
We cannot define a potential
energy for friction
W
W
W
because F
N and F
g are both perpendicular to d r WCM . On the other hand, F
F is
W
opposite to d r CM, so dK is negative, implying that this part of the interaction
drains the book’s kinetic energy. Where does this energy go?
Since the book is not rotating, it can’t go to rotational energy. Might it go
to some form of potential energy? An interaction’s potential energy, by definition, depends only on the characteristics of the interacting objects and their
separation. In this case, the separation between the book and table does not
change during the interaction, so whatever potential energy that interaction
might hypothetically have must remain constant! Moreover, the amount of
energy transformed as the book slides a given distance depends on variables
such as the book’s speed: an interaction’s potential energy should depend
only on separation and object characteristics, not on quantities such as the
speed. We cannot, therefore, use a potential energy function to describe the frictional
part of a contact interaction. So, again, where does that energy go?
Other contact interactions also can seem to make kinetic energy disappear without an increase in anything that we might plausibly consider to be
potential energy. If we drop a book on the floor, gravitational potential energy
is converted to kinetic energy as the book falls. But when the book hits the
floor, that energy seems to vanish. Similarly, when you catch a b
­ aseball or
hammer a nail or collide with a wall, kinetic energy seems to ­disappear.
C12.2
The caloric model
The calorie
(C12.1)
Caloric Is Energy
The insight that physicists needed to move past this stumbling block came
from work in an area of physics that initially seemed unrelated. Powerful
as ­Newton’s theory of mechanics was, it did not seem to have anything to
say about physical processes involving heat and temperature change. Physicists studying such thermal physics problems in the 1700s and early 1800s
therefore had to create different models to explain these phenomena.
Prior to the 1840s, the accepted model of thermal physics (proposed by
Joseph Black in 1770) was that hot objects contain an abundance of a fluid
called caloric. In this model, an object feels hot because of the caloric it holds,
in much the same way as a sponge feels wet because of the water it holds.
When we bring hot and cold objects into contact, caloric flows from the hot
one to the cold one because caloric particles repel each other and thus naturally expand into the comparatively empty cold object.
Caloric was measured in calories, where 1 cal was defined to be the
amount of caloric required to increase the temperature of 1 g of water by
C12.2 Caloric Is Energy
189
1°C. Experiments showed that increasing the temperature of water by 2°C
­required almost exactly twice as much caloric as increasing it by 1°C, and
doubling the water’s mass doubled also the amount of caloric required. So
the caloric absorbed or released by an amount of water with mass M undergoing a given (relatively small) temperature change is given by
Caloric absorbed/released = cM ΔT where c = 1.00 cal/(g·°C)
(C12.2)
Indeed, physicists found that the same equation describes almost any substance ­undergoing a (relatively small) change in temperature as long as c is
given a value appropriate to the substance.
The caloric model is intuitive and vivid, and it works well in most common circumstances. Starting in the late 1700s, though, physicists began to
notice weaknesses with the model. Benjamin Thompson, though born in
colonial America, emigrated to Europe during the Revolutionary War, where
he became director of the Bavarian Arsenal and was given the title Count
Rumford. While supervising the boring of cannons, Thompson noticed that
so much caloric seemed to be released by the drilling process that water used
to cool the drill bit boiled away and had to be continuously replaced. The
model of this process at the time was that grinding up the metal released
caloric bound inside it. Thompson, however, determined that there seemed
to be no limit to the caloric that could be released from a finite amount of
iron. This seemed absurd, so he proposed in 1798 that caloric was not really
a substance at all but rather a form of motion created by the tool’s motion.
Thompson later showed that the caloric generated by such a tool is approximately proportional to the mechanical energy supplied to the tool.
By the 1830s, many physicists were thinking about this general problem. In 1843, the British physicist James Prescott Joule provided a crucial
piece of evidence by demonstrating experimentally that the effects of adding
caloric to an object could be both qualitatively and quantitatively duplicated
by transferring mechanical energy to the object (using friction as the agent
of energy transfer). Figure C12.1 schematically illustrates Joule’s apparatus.
In this experiment, a paddlewheel driven by falling weights stirs water in a
thermally insulated container. Joule reasoned that the gravitational potential energy released as the weights moved downward was absorbed by the
water, and he showed that adding energy in this way caused the same kind of
temperature increase that adding caloric would.
The demise of the
caloric model
Thermometer
Pulley
Figure C12.1
m
Water
m
Paddles
(a)
Insulated
container
m
(b)
m
A simplified diagram of the
­apparatus used by James Joule
to demonstrate that adding
mechanical energy to water was
equivalent to adding caloric.
Joule was able to use this apparatus to show that there was a fixed
relationship between caloric and
mechanical energy.
190
Chapter C12
Thermal Energy
To appreciate the full significance of Joule’s work, we need to remember that the calorie and the joule are independently defined. The calorie is an
amount of caloric defined in terms of the temperature increase observed
when the caloric is transferred to a known amount of water. The joule, on the
other hand, is a unit of energy that is defined in terms of purely mechanical
variables: 1 J = 1 kg·m2/s2. There is no obvious reason why there should be
any connection between these two quantities. Yet Joule showed that
1 cal = 4.186 J
Conservation of energy is
“discovered” in the 1840s
(C12.3)
consistently in a variety of circumstances—that is, putting a given amount
of mechanical energy (4.186 J in modern units) into an object always had
exactly the same effect as putting 1 cal of caloric into it. Joule also linked the
calorie to units of chemical and electrical forms of energy.
By the end of the 1840s, the physics community understood that Joule’s
results (supplemented and supported by the work of other physicists) meant
that the caloric model was incorrect: what had been called caloric was in fact a
previously unknown form of energy, and the energy of an isolated system was
conserved. It is hard to say who first thought of this idea in its full generality:
various physicists at various times expressed versions of the idea in very different terms. Unlike some “discoveries” in physics, this extremely important
and powerful idea (one of the greatest intellectual triumphs of the 19th century!) seems to have occurred gradually to a number of people at roughly the
same time. In any case, by the end of the decade, the caloric model was dead,
and the principle of conservation of energy had become firmly established.
Exercise C12X.1
Performing the experiment shown in figure C12.1 is not easy. Assume that
the two weights have masses of 2.0 kg each and are able to drop a distance of
0.5 m. If the container contains 4 kg of water (about 1 gallon), what will be the
approximate change in temperature?
C12.3
The contemporary model of
internal energy storage
Thermal Energy as Microscopic Energy
In the middle of the 19th century, it was still unclear how an object could
­absorb and hold energy and what this energy had to do with temperature.
Since the early 1900s, though, physicists have understood that (1) all objects
are constructed of a huge number of tiny molecules, (2) these molecules are
in ceaseless random motion, and (3) an object’s temperature is a measure of
the intensity of this motion. We will discuss the definition of temperature more
fully in unit T, but a substance’s temperature T (measured in the SI unit of
kelvins) turns out to be directly proportional to the average kinetic energy
per molecule of the substance’s molecules’ random motions (treating each
molecule as a point ­particle):
Kavg (per molecule) = _32 kBT
The absolute temperature scale
and absolute zero
(C12.4)
where we call kB = 1.38 × 10-23 J/K Boltzmann’s constant.
This simple statement is possible only if we define temperature in such
a way that an object whose molecules are all at rest has a temperature of
zero. Since molecules cannot have negative kinetic energy, this is the lowest
possible temperature an object can have. We therefore call this temperature
C12.3 Thermal Energy as Microscopic Energy
191
a­ bsolute zero. The Kelvin temperature scale is defined so that 0 K corre­
sponds to absolute zero and so that a difference in temperature of 1 K is
the same as a difference in temperature of 1°C (= 0.01 times the ­temperature
difference between freezing and boiling water). With these definitions, the
temperature of freezing water (0°C) turns out to be 273.15 K, and other Celsius temperatures can be converted to kelvins by adding 273.15 K. (Note
that while we read 0°C as “zero degrees Celsius,” you should read 273.15 K
as “273.15 ­kelvins.” You should not say “degrees kelvin” or write K with a
degree ­symbol: the SI unit of kelvins is treated exactly as any other SI unit.)
Equation C12.4 would seem to imply that the total thermal energy stored
internally by an extended object containing N moving molecules should be
Thermal energy = _ 32 NkBT (??)
(C12.5)
However, as a practical matter, we define an object’s thermal energy U th to be
that portion of its internal energy that depends on T. An object’s thermal energy
therefore includes not only the kinetic energy associated with the random translational motion of its molecules but also any energy associated with the rotation or vibration of atoms within molecules, the potential energies of (ordinarily
fairly weak) interactions between molecules, and so on—anything that might
depend on T. The fraction of a substance’s total thermal energy that gets stored
in the potential energies of intermolecular interactions and molecular rotations
and vibrations can have a complicated relationship to its average translational
molecular kinetic energy (and thus its temperature). Therefore, while equation C12.4 applies quite generally to many substances, equation C12.5 applies
only to rarefied monatomic gases (such as helium), whose molecules are single
atoms (which cannot vibrate or rotate) and are spaced so far apart that any
interactions between them are negligible. In general, one can only say that the
average thermal energy per molecule in a given substance is (virtually always)
a monotonically increasing (but possibly quite complicated) function of its temperature T, and that its value is usually between kBT and 10 kBT.
So at the microscopic level, an extended object’s thermal energy is nothing more than the kinetic energies of the object’s molecules (relative to its
center of mass) and whatever interparticle potential energies depend on temperature. We have already seen (see section C11.4) that we can separate the
kinetic energies of any kind of particle motion relative to an object’s center
of mass from the kinetic energy of the object’s center of mass and treat the
former as a form of internal energy. Potential energies of interparticle interactions are also independent of the motion of the object’s center of mass and
depend on nothing external, so they are also completely internal.
Because we cannot see these microscopic motions and interactions, this
energy seems more “hidden” than, say, the internal energy associated with
rotation. Fortunately, we can keep track of at least the thermal portion of an
extended object’s internal energy by keeping track of its temperature T. We’ll
talk about exactly how in more detail in section C12.6.
Exercise C12X.2
An extended object can contain a lot of thermal energy. A cubic foot of helium gas at atmospheric pressure and room temperature (22°C = 295 K) has
a mass of only about 5 g and contains 7.5 × 1023 molecules. Estimate the thermal energy that this much helium contains. How fast would you have to run
to have this much kinetic energy?
What counts as thermal energy
Chapter C12
192
Thermal Energy
Book
Table
(a)
(b)
(c)
Figure C12.2
A schematic illustration of a book’s molecules sliding past atoms on a table. In (a), two molecules become entangled.
In (b), these molecules are pulled and twisted out of position by the motion of the book. In (c), the molecules snap back
and oscillate wildly. (This scenario has been greatly simplified.)
C12.4
How friction transforms
kinetic to thermal energy
Why we cannot calculate the
work done by friction
Friction and Thermal Energy
Before we get into the issue of exactly how we can determine an object’s thermal energy from its temperature, let’s note that we are now in a position to
understand (at least qualitatively) how friction transforms kinetic energy to
thermal energy. Consider again the book sliding on the table. When two surfaces are in contact and one moves past the other, their surface molecules
often become entangled (see figure C12.2). As the book continues to push
ahead, the entangled molecules are stretched away from their normal positions. Their interaction transforms a tiny bit of the book’s k
­ inetic energy
to potential energy in the interactions between molecules (represented by
springs here). At a certain point, the molecules suddenly become unstuck and
snap back toward their initial positions, where they oscillate wildly. Interactions between the surface molecules and other molecules deeper inside the
object eventually distribute the energy of the oscillating surface molecules to
the rest of the book and to the table. Macroscopically, all we see is that both
the table and the book become warmer.
This is a greatly simplified model, but it does explain how the macroscopic kinetic energy of the sliding book can be converted to thermal energy.
This model, therefore, solves the mystery of the disappearing energy: the
kinetic energy apparently lost as the book slides is actually simply being
transformed to thermal energy. Understanding this, as Joule and his contemporaries first saw, makes conservation of energy credible as a universal law.
This model also helps us understand why we cannot easily compute the
work done on either the book or the table by the friction interaction. Remember that work is energy flowing across a system boundary due to an interaction that exerts a force. The interactions between surface molecules do exert
forces on those molecules, and the molecules do get displaced, but we can
neither measure the microscopic individual forces exerted on the molecules
nor their resulting microscopic displacements.
Moreover, while we can easily measure the book’s loss in kinetic energy,
we have no way of knowing a priori how much of that energy flows into the
book and how much flows into the table. If the table molecules are stiff but
the book’s molecules are springy, then the book’s molecules will suffer larger
­displacements while entangled and therefore will have more work done on
them than the table’s molecules. Therefore, there is no easy way to predict
what fraction of the energy goes to the book (the part that is work done on
the book) and what fraction goes to the table (the part that is work done on the
table). All we can say is that the sum of their increases in the thermal energies
must be equal to the kinetic energy lost by the book.
C12.5 Heat, Work, and Energy Transfer
C12.5
193
Heat, Work, and Energy Transfer
In many practical situations, we have no way of knowing how much internal
energy an object contains at a given temperature. However, as is the case for
potential energy, the change in internal energy is what is usually important.
Since an object’s thermal energy resides entirely inside that object, we can
determine how that thermal energy changes by keeping careful track of the
amount of energy that crosses the object’s boundaries.
An analogy might help. You don’t need to know how much oil is in your
car’s engine to keep it running. You can keep track of the oil level using the
dipstick. If you see oil dripping on the garage floor, then you know there will
be less oil in the engine. If no such spot appears but the oil level goes down
anyway, then you can guess that your engine is burning oil. You can thus tell
a lot about how the amount of oil in your engine changes without actually
knowing the total amount. Similarly, determining how an object’s thermal
energy changes involves keeping track of the amount of energy that flows
across its boundary. The core thermodynamic concepts of “heat” and “work”
both describe energy transfer across a system boundary.
What is “heat?” When a hot object touches a cold object, we find that
energy spontaneously flows across their boundary from hot to cold until both
objects have the same temperature. We’ll discuss this in greater detail in
unit T, but basically, vigorously moving molecules on the hot object’s surface bump against molecules on the cold object’s surface, exciting them to
move more rapidly until all move with the same vigor. We cannot see this
happening, though, because this process is taking place at the submicroscopic level.
Physicists define heat Q to be any energy that crosses the boundary
between two objects because of a temperature difference between them. Let
me emphasize that to be heat, the energy flow in question must
Keeping track of thermal
energy by watching the
boundaries
The definition of heat
1. Be flowing across some kind of boundary between two objects and
2. Do so as a direct result of a temperature difference across that boundary.
We have already defined work W to be energy flowing across a system boundary due to an external interaction that exerts a force. For example, if I vigorously stir a cup of water and so make it warm, I have not
“heated” the water, I have done work on it; the energy that flows across the
water’s boundary flows because I stirred it, not because of any temperature
difference.
Note that heat and work both refer to energy moving across a boundary. This
sharply distinguishes both from an object’s internal energy (which includes
thermal energy), which is energy inside the object’s boundary. Both heat and
work can contribute to changes in an object’s internal energy.
Energy can flow into a system in still other ways. For example, a dark
object sitting in sunlight becomes warm because energy has flowed across
its boundary in the form of light. An electrical stove burner becomes warm
because electrical energy flows into it. We’ll talk about such transfers more
in chapter C13. For the present, let’s simply denote any energy transfers that
are not heat or work using the symbol [E].
Conservation of energy requires that a system’s change in energy ∆E
must be equal to the heat, work, and other energy transfers that flow into it:
W + Q + [E] = ΔE = ΔKtot + ΔUtot + ΔVtot (for a multi-object system)(C12.6)
where ∆Ktot and ∆Utot are the changes in the total kinetic (center-of-mass)
kinetic energies and total thermal energies of the system’s macroscopic parts,
respectively, and ∆Vtot is the total potential energy of interactions between
Reviewing the definition
of work
Why both are different than
internal energy
Other ways that energy can
flow across a boundary
Chapter C12
194
those parts. If (as is often the case), the system consists of a single extended
object at rest, then this expression simplifies to
The first law of
thermodynamics
W + Q + [E] = ΔU
Heat is not thermal energy!
Ice
System
W
(+)
F
Light
Q
(–)
Piston
U
Thermal Energy
[E]
(+)
Q
(+)
(for a single-object system at rest)
(C12.7)
because a single object at rest can have nothing but internal energy. Thermal
physicists call equation C12.7 the first law of thermodynamics (but often
include what I am calling energy transfers [E] into the definition of work).
Remember that thermal energy U th is one form of internal energy: it is
the part of an object’s internal energy U that changes when its temperature
changes. As in the case of U rot, the superscript “th” is not an ­exponent, but a
label: it simply distinguishes thermal energy from internal energy in general.
I also want to emphasize that the definitions in this section make it clear
that heat is not the same as thermal energy in physics. Heat is always energy
flowing across an object’s boundary, never energy inside that boundary. So an
object can absorb heat, but it never contains heat! Keeping these terms straight
is essential to avoid confusion when studying thermal physics. Unfortunately, the word heat is used colloquially (and even in some science books) in
ways incompatible with its technical meaning. Be careful to avoid using language (such as “friction converts energy to heat in the object”) that confuses
heat with thermal energy. In fact, friction does work on a sliding or rubbing
object (because it is an energy transfer mediated by a force).
Figure C12.3 illustrates some of these distinctions.
Exercise C12X.3
Hot plate
Figure C12.3
An illustration of the distinctions
between heat Q, work W, and
other kinds of energy transfers [E].
In each process described below, energy flows into the system (S) from outside. Is the energy flow heat Q, work W, or some other energy transfer [E]?
(a) The water in a pan (S) sitting on an electric stove gets hot.
____
(b) A cup of water (S) in a microwave oven gets hot.
____
(c) The brake shoes (S) in your car get hot when used on an incline. ____
(d) The air in a balloon (S) gets hot when you compress it.
____
(e) Electricity flowing from a battery makes a wire (S) warm.
____
uth
C12.6
T
duth ≈ b dT
duth
dT
Figure C12.4
When viewed on the large scale,
the thermal energy per molecule
uth may be a complicated function
of absolute temperature T, but
over a sufficiently small range, it
will usually look linear.
Specific “Heat”
In section C12.3, we discussed how the average thermal energy per molecule
in a given substance uth = U th/N (where N is the number of molecules) is
generally some complicated function of the substance’s absolute temperature T. Figure C12.4 illustrates what a graph of uth as a function of T might
look like for a hypothetical substance. This graph makes it clear that while
temperature and thermal energy are clearly related, they are not equivalent.
Temperature is to thermal energy roughly what the depth of water in a jar is
to the volume of water in the jar. Just as the shape of a jar influences how the
volume of water it holds is related to its depth, so the microscopic physics of
a substance influences how the thermal energy in an object of that substance
is related to its temperature. Also, just as two jars may have the same water
depth and yet hold different amounts of water, so two objects may have the
same temperature and yet contain different amounts of thermal energy. Temperature indicates, but is not equivalent to, thermal energy.
However, the figure also illustrates that within a sufficiently small temperature range, uth often increases linearly with temperature, meaning that
duth = some constant ≡ b (for small dT)
duth ∝ dT ⇒ ____
(C12.8)
dT
C12.6 Specific “Heat”
195
where b depends on the type of substance and on the approximate temperature. If one molecule in the substance has mass M1, a block of the substance
with mass M will have N = M/M1 molecules. The change in the total thermal
energy dU th for such a block for a sufficiently small change in temperature
dT will therefore be
dU th = Nuth = ___
M b dT = M ___
b dT
(C12.9)
M1
M1
( )
( )
The quantity b/M1 is also a substance-specific constant that we can call c. So
dU th = Mc dT
(C12.10)
The defining equation
for specific “heat” c
• Purpose: This equation connects a small change in an object’s thermal
energy dU th with a small change in its temperature T, where M is the
object’s mass and c is a substance-specific constant that we call the substance’s specific “heat.” (Don’t confuse c with the speed of light!)
• Limitations: The temperature change dT must be small enough that c
is approximately constant over the temperature range.
The value of c varies with the type of substance and also depends on a
given substance’s phase (that is, whether it is a gas, liquid, or solid). It also
may depend weakly on the temperature T and/or the surrounding pressure.
For example, careful measurements indicate that the specific “heat” of liquid
water at normal atmospheric pressure ranges from a high of 4217 J/(kg·K)
near water’s freezing and boiling points to a low of 4178 J/(kg·K) at about
34°C, a total variation of about 1%. The value of c for liquid water is usually
quoted as being 4186 J/(kg·K) (its value at 15°C) and is within 0.2% of this
value between about 3°C and 97°C. The value of c for ice, however, is about
2100 J/(kg·K), less than one-half that of water only a few degrees warmer!
Temperature ranges where dT is “sufficiently small” can therefore be tens or
even hundreds of kelvins for some substances in some cases, but might be
very small indeed near where a substance changes phase.
Note also that since a kelvin has the same size as a degree on the Celsius
scale, temperature differences have the same numerical value in both systems.
Table C12.1 lists values of c for various common substances evaluated
near room temperature (20°C).
I put quotation marks in the term specific “heat” to draw attention to a
conceptual problem with this conventional term. Specific is fine: in physics
and chemistry, this adjective generally describes a quantity defined so that
Table C12.1 Specific “heats” for some common substances
(evaluated at about 20°C unless otherwise indicated)
Substance
Water (15°C)
Flesh (mammalian)
Alcohol
Ice (-5°C)
Wood
Aluminum
c in J/(kg·K)
4186
3400
2400
2100
≈1700
900
Substance
Granite
Air
Iron
Silver
Gold
Lead
c in J/(kg·K)
790
≈790
450
234
129
128
Why the quotation marks?
196
Chapter C12
Thermal Energy
it depends on the type but not on the amount of a substance. However, heat is
misleading: c expresses the change in the substance’s thermal energy per unit
mass per unit temperature, not the change in its “heat.” (Since an object cannot contain “heat,” the whole idea of “a change in an object’s heat” does not
even make sense.) We could just as easily cause an object’s thermal energy
to change by doing work on it as by heating it. An object’s specific “heat”
therefore does not necessarily have anything to do with heat!
Think of the quotation marks as my way of saying that “we really should
say thermal energy instead of heat.” (The term became conventional in the 19th
century before thermal energy and heat became firmly distinguished.)
C12.7
Handling interactions that
cause thermal energy changes
Problems Involving Thermal Energies
Our efforts in this chapter mean that we can now solve conservation of
energy problems involving contact interactions that mediate energy transfers
to or from objects’ thermal energies. These interactions are generally either
1. Impact or friction interactions that do work on one or more objects or
2. Thermal contact interactions that directly transfer heat from a hot object
to a cold object.
Rethinking what we mean by
“isolated” in an energy context
When kinetic and/or potential energy seems to disappear in a process, an
interaction of the first type is probably involved. The second type comes into
play whenever objects in contact have different temperatures.
When declaring interactions of either type in a list of internal interactions in a problem solution, you may simply write the symbols for the thermal energies you expect this interaction will affect, and then make sure such
terms appear in your master equation. In problems involving the first type
of interaction, it is often pretty obvious how much energy gets converted to
thermal energy, but sometimes one must apply the momentum requirement
to determine this. In problems of the second type, remember that the heat
transfer will stop when the objects have the same temperature.
We also will now encounter more systems that don’t involve something
interacting with the earth, so we need to think more generally about when a
system qualifies as being “isolated.” We can use the same general categories
as for conservation of momentum: a system can be “truly isolated,” “functionally isolated,” or “momentarily isolated” (that is, it might participate in a
very brief “collision”), but we have to reinterpret each somewhat.
“Collisions” are still straightforward: they just have to be brief enough
that energy does not have time to flow in any form into or out of the system.
A system is “functionally isolated” if there are significant external interactions acting on objects in the system, but those interactions do no work,
cause no heat to flow, and cause no other energy flows across the system
boundary. For example, a system consisting of objects at rest surrounded by
a good thermal insulator (a material that does not allow much heat to flow
through it) is functionally isolated from an energy viewpoint: if the objects
are at rest, no external interaction can do work on them, and the insulator
prevents heat flows (and often other possible energy flows as well). How
good an insulator we need depends on the time intervals and/or temperature differences involved. For processes involving tens of seconds and temperature differences of tens of degrees, air is a reasonably good insulator. For
other processes, a better insulator (such as Styrofoam) may be required.
A system that “floats in space” no longer automatically qualifies as being
truly isolated. For example, a star in space can lose energy to its surroundings by radiating light. A truly isolated system participates in no interactions
C12.7 Problems Involving Thermal Energies
197
that transfer energy in any form to or from its surroundings. Systems involving something interacting with the earth still often qualify, however.
The following commented examples illustrate the issues.
Problem: Suppose we drop a bag of lead shot (which consists of small lead
spheres) from the top of a ten-story building. About how much warmer will
the shot be after the bag hits the ground?
Solution Here are initial and final diagrams for this situation:
Building
Initial:
Initial
and final
diagrams
Final:
z
zi = 10×(≈3 m) ≈ 30 m
zf = 0
zi
│v
Wi│ = 0, │v
Wf│ = 0
2
W
g
=
9.8
m/s
│
│
Bag of lead
c (lead) = 128 J/(kg·K)
shot, mass m
specific “heat” c m = ? change in temperature ∆T = ?
Symbol
definitions
Internal Interactions:
• Gravitational: Vg = m│g
W│z
(Vg = 0 at z = 0 = ground)
• Contact with ground →
th
keep track of U th
b and U e
(thermal energies of the
bag and the earth)
zf
The system is the bag and the earth, which floats in space and also should
not radiate or absorb much energy during this brief process. The earth is
so massive that its initial and final kinetic energies K ei and K ef will both be
essentially zero. Note that the bag’s initial and final kinetic energies K bi and
Kbf are also zero. Since the bag is always close to the earth’s surface, we can
use Vg = m│g
W│z to describe the internal gravitational interaction. The internal
contact interaction with the ground seems to cause the bag’s kinetic energy to
disappear upon impact, so that energy must be going to the thermal energy
of the earth and/or the bag. In fact, we can reasonably assume that it goes
almost entirely to the lead shot, as that shot will move around a lot during
the impact compared to atoms on the ground, meaning that the impact forces
are likely to do much more work on the lead then on atoms in the ground.
Let’s assume, therefore, that U
th
e is essentially constant in this process. We
th
will also ignore the enclosing bag itself. Let U th
bi and U bf be the lead shot’s initial and final thermal energies, respectively. The master equation is therefore
⏞
0
⏞
0
⏞
⏞
0
⏞
≈0
≡0
stated
(
)
Knowns and
unknowns
List of internal interactions with a description
of how each is handled
System description
How system is isolated, with justification
Approximations and
assumptions stated
Symbol definitions
Discussion of how
internal interactions
will be handled
Approximations and
assumptions stated
Symbol definitions
(C12.11)
where I have assumed that ∆T is sufficiently small that c ≈ constant. So
m│g
W│zi _______________
@
@
1J
(9.8 m
/│s
2)(30 m
) __________
⇒ ΔT = ______
=
= 2.3 K
mc
128 J/(kg
@
2/│s2
· K) 1 kg
· m
Definition of a coordinate axis (useful here
because we are using
the near-earth gravitational potential energy
formula)
Master
equation
@
Kbi+ U th
ei+ U
th
W│zi = K
bf+ U th
ef+ U
@
th
W│z f
e + m│g
bf + K
e + m│g
bi + K
th
th
Assumption
⇒ m │g
W│zi = U th
bf − U bi = ΔU b ≈ mc ΔT
Example C12.1
(C12.12)
The units work out and ∆T is indeed small, so the result is plausible. Note
that the lead’s mass is irrelevant (which is good, as we did not know it!).
Algebra with
symbols
Calculation includes
and tracks units
Final check of
plausibility
Chapter C12
198
Example C12.2
Thermal Energy
Problem: Suppose we place a 50-g aluminum cylinder with an initial temperature of 100°C into a cup containing 250 g of water at 22°C. The cup is
pretty thick Styrofoam and has a Styrofoam cover. What is the final temperature of the cup’s contents?
Solution Initial and final diagrams appear below.
Initial
and final
diagrams
Symbol
definitions
Initial:
Water: mass mw,
specific “heat” cw
Amazing
transparent
Styrofoam
Aluminum cylinder: mass mc,
specific “heat” cc
Knowns and
unknowns
System description
How system is isolated, with justification
Discussion of how the
internal interactions
will be handled
Master
equation
Symbol definitions
Final:
Twi
Tci
Tf
Tf
mc = 0.050 kg,
mw = 0.250 kg
Internal interactions:
Tci = 100°C = 373 K, Twi = 22°C = 295 K,
• Contact between water and
cylinder: track thermal enercw = 4186 J/(kg·K), cc = 900 J/(kg·K)
th
gies Uth
Tf = ?
List of internal interactions with a
c and Uw of both
description of how each is handled
The system is the cylinder and the water. This system participates in significant external gravitational and contact interactions, but because all parts are
at rest, these interactions do no work on the system. The surrounding Styrofoam insulation also ensures that little heat flows into or out of the system.
Therefore, this system is functionally isolated from an energy point of view.
The only internal interaction is the contact interaction between the water and
the cylinder, which allows the hot aluminum to transmit heat to the water.
We can therefore handle this interaction by keeping track of the thermal
energies of both the water and cylinder. Since neither object has any kinetic
energy initially or finally, and since the contact interaction has no potential
energy, the master equation in this case becomes simply
th
th
th
th
th
th
th
th
th
U th
ci + U wi = U cf + U wf ⇒ −U wf + U wi = U cf + U ci ⇒ −ΔU w = ΔU c (C12.13)
where the i and f subscripts mean “initial” and “final,” respectively. If we can
assume that the temperature change is “sufficiently small” that cw and cc are
nearly constant, then this becomes
−mw cw ΔTw = mc cc ΔTc ⇒ −mw cw (Tf − Twi) = mc cc (Tf − Tci)
Algebra with
symbols
Calculation includes
and tracks units
Final check of
plausibility
⇒ mc cc Tci + mw cw Twi = mc cc Tf + mw cw Tf = (mc cc + mw cw)Tf
mc cc Tci + mw cw Twi
⇒ Tf = ________________
mc cc + mw cw
(C12.14)
In this particular case, we have mc cc = (0.050 kg
) (900 J/(
kg · K)) = 45 J/K and
mw cw = (0.250 kg
) (4186 J/(kg ·
K))
=
1050
J/K,
so
(45
J/K
)(373 K) + (1050
J/K
)(295 K)
________________________________
Tf =
= 298 K (= 25°C)
45 J/K
+ 1050 J/K
The units work out and Tf is between Tci and Twi, as it must be.
(C12.15)
Two-minute Problems
199
TWO-MINUTE PROBLEMS
C12T.1 A railroad car collides with a similar car at rest. The
cars lock together. Such a process must convert a significant fraction of the originally moving car’s kinetic energy
to thermal energy. T or F?
C12T.2 Suppose the average thermal speed of molecules in a
gas at room temperature (22°C) is │v
W0│. If we “double” the
gas’s temperature (to 44°C), what is the average molecular
speed now? Select the closest response.
A. About
the same
__
B.
2 │v
W0│
C. 2│v
W0│
D. 4│v
W0│
E. 22│v
W0│
C12T.3 If you rub your hands together, they get warmer
(try it!). Rubbing therefore heats your hands. T or F?
C12T.4 Is the specified change in the following objects’
thermal energies due to a flow of heat (A), work (B), or
some other flow of energy (E)?
(a) A hot cup of tea on a table becomes cooler with time.
(b) A meteorite entering the atmosphere becomes hot.
(c) Liquid nitrogen poured on a slab of ice boils furiously.
(Liquid nitrogen’s boiling point is 77 K.)
(d) Infrared laser light falling on a metal slab makes it hot.
(e) A drill bit gets hot as it drills a hole in a metal slab.
C12T.5 Suppose I push a block along a tabletop at a constant velocity. If I exert a constant forward force of F
W on the
block and push it through a distance D, I do work on the
block equal to │F│D. Since the block’s kinetic energy does
not change, friction must be exerting a backward force
W
on the block of the same magnitude as F
(so that the net
force on the block is zero, as required to maintain the
block’s constant velocity). What work does the friction
force do on the block?
A. No work
B. −│F
W│D
C. +│F
W│D
D. Some negative work, but we need more information to
determine exactly how much.
E. Some positive work, but we need more information to
determine exactly how much.
C12T.6 Objects A and B are made of the same substance, but
object A is twice as massive as object B. Object A originally
has a temperature of 100°C and B has a temperature of
0°C. Suppose these objects are put inside a well-­insulated
cup and are allowed to come to a common temperature Tf .
What is that temperature? Select the closest answer.
A. 75°C
B. 67°C
C. 50°C
D. 33°C
E. 25°C
C12T.7 Which of the following statements best describes
the relationship between the energy EA required to increase
a 1000-kg car’s speed from 0 to 23 m/s (about 50 mi/h)
and the energy EB required to increase the temperature of
1 gal (≈ 3.8 kg) of lemonade from refrigerator temperature
(about 5°C) to room temperature?
A. EA >> EB
B. EA ≈ EB
C. EA << EB
C12T.8 The heat energy released by a 1-kg bottle of water
as its temperature decreases by 1°C could (if we could convert it to gravitational potential energy) lift that bottle hundreds of meters into the air. T or F?
C12T.9 You and a classmate are discussing how much work
one must do to lift a box of mass m a vertical distance h.
Your classmate argues, “You have to exert an upward force
on the box at least equal in magnitude to the box’s weight
m│g
W│, and you lift the box upward a distance h, so you
must do work equal to m│g
W│h. But in addition,” your classmate continues, “you must increase the box’s gravitational
potential energy by m│g
W│h. Therefore, you must actually
do work equal to or greater than 2m│g
W│h to lift the box.”
What amount of work do you think you need to do on
the box to lift it a height h? Be prepared to defend your
response. (Hint: What is the system here?)
A. Zero work
B. About m│g
W│h (if you move the box slowly)
C. Significantly greater than m│g
W│h but less than 2m│g
W│h
D. About 2m│g
W│h (if you move the box slowly)
E. Significantly greater than 2m│g
W│h
C12T.10 Substance A has twice the specific “heat” as substance B. Suppose we put 100-g blocks of these substances
in direct sunlight. Assume both blocks are black and present the same surface area to the incoming sunlight. After
a certain period of time, how are the temperature changes
∆TA and ∆TB of these blocks related (assuming they lose
little heat to their surroundings)?
A. ∆TA ≈ 2∆TB
B. ∆TA ≈ ∆TB, as both receive the same amount of energy
C. ∆TB ≈ 2∆TA
D. ∆TA = ∆TB = 0, because neither receives any heat
C12T.11 Substance A has twice the specific “heat” as substance B. Suppose we have a 50-g block of each substance
at a common initial temperature of 100°C. We then put
both blocks into a well-insulated cup containing 500 g of
water at 20°C, and wait until the objects’ and the water’s
temperatures no longer change.
(a) Which has suffered the greater temperature change?
(b) Which block has given up more energy to the water?
A. Block A
B. Block B
C. The quantity is question is the same for both blocks.
200
Chapter C12
Thermal Energy
HOMEWORK PROBLEMS
Basic Skills
C12B.1 Suppose we launch a metal block of mass m along
a metal tabletop with an initial horizontal velocity v
W. Friction exerts an opposing force on the block as it slides, and
the block comes to rest after traveling a distance d. Use the
momentum requirement to determine the magnitude of the
friction force acting on the block.
C12B.2 You will find formulas for converting between
the absolute, Celsius, and Fahrenheit temperature scales
inside the front cover of this book. Use these formulas to
answer the following questions.
(a) Normal human body temperature is generally stated
as being 98.6°F, which is a bit over-precise, considering
that a person’s temperature generally varies by about
±0.9°F during the day and also varies somewhat from
person to person. What is this in °C? What might you
conclude from this being a nice round integer?
(b) The boiling point of water at normal atmospheric pressure is defined to be 100°C. What is this in °F?
(c) The air temperature during a cold Minnesota night
might be -40°F. What is this in °C? In kelvins?
(d) The boiling point of liquid nitrogen is 77 K. What is
this in °C? In °F?
(e) What is absolute zero in °F?
C12B.3 A hollow metal block of mass m and specific “heat”
c falls from rest from a height h above water of mass M and
specific “heat” C in a tub, in which (after some splashing
and bobbing dies down) the block eventually floats at rest.
Assume that the block and water have the same temperature initially, that they have the same (possibly different)
temperature finally, that little heat is lost from the water
and block to their other surroundings in the process, and
that no water is lost from the tub in the splash.
We can look at this situation from three different perspectives, depending on what we take to be “the system.”
We might consider the system to be
(1) the block + the tub of water + the earth,
(2) the block + the tub of water, or
(3) the block alone.
For each case, answer the following questions for the complete process (from just as the block starts falling from rest
to when it ends up at rest in the tub with the same temperature as the water). Energy “internal to the system”
for a multiobject system includes the objects’ internal
energies as well as the potential energies of any interactions between those objects. In some cases, unambiguously specifying the amount of energy involved might be
­impossible: if so, explain why.
(a) What net work (if any) is done on the system?
(b) What net heat (if any) flows into or out of the system?
(c) What form of energy internal to the system (if any)
decreases and by how much?
(d) What form of energy internal to the system (if any)
increases and by how much?
C12B.4 Suppose we launch an aluminum block of mass m
along an aluminum tabletop with an initial horizontal velocW . Friction exerts an opposing force on the block as it slides,
ity v
and the block eventually comes to rest. Assume the block and
tabletop have the same initial temperature, the same (possibly different) final temperature, and that the process takes
place so rapidly that little heat flows from either the block or
the tabletop to the environment.
We can look at this situation from three different perspectives, depending on what we take to be “the system.”
We might consider the system to be
(1) The block + the table + the earth
(2) The block + the table, or
(3) The block alone.
For each case, answer the following questions for the complete process (from just after the block is launched to when it
comes to rest). Energy “internal to the system” for a multiobject system includes the objects’ internal energies as well
as the potential energies of any interactions between those
objects. In some cases, unambiguously stating the amount
of energy involved might be impossible: if so, explain why.
(a) What net work (if any) is done on the system?
(b) What net heat (if any) flows into or out of the system?
(c) What form of energy internal to the system (if any)
decreases and by how much?
(d) What form of energy internal to the system (if any)
increases and by how much?
C12B.5 When someone has a fever, his or her body temperature might increase by as much as 2°C. Suppose this
person has a mass of 50 kg.
(a) About how much energy is required to raise a person’s
temperature this much?
(b) What is this energy in food calories? (1 food calorie ≡
1 Cal ≡ 1000 calories = 1 kcal.)
C12B.6 Suppose we could take the thermal energy released
by decreasing the temperature of a 1-kg bottle of water by
1°C and convert it to mechanical energy. About how high
could we lift the bottle with this energy?
C12B.7 Estimate how much energy it would take to increase
the temperature of a 500-g iron horseshoe from room temperature to about 1000°C. What (possibly questionable)
assumption(s) must you make to calculate this?
C12B.8 Compare the thermal energy that a cup (250 g) of
tea loses in going from 95°C (nearly boiling) to room temperature and the kinetic energy your body would lose if
you ran into a brick wall at 5 m/s (about 11 mi/h).
C12B.9 A nice hot bath can require 40 gal of water whose
temperature has been increased from the temperature of
groundwater, about 55°F (13°C), to maybe 120°F (49°C)
in the water heater. If electric energy costs about $1 per
25 MJ, how much does a bath cost you if you have an electric water heater?
Homework Problems
201
C12B.10 An average residential swimming pool contains
about 15,000 gal. Suppose the owner wants to use an electric pool heater to heat the water in such a pool from 63°F
(about 17°C) to 75°F (24°C). If electric energy costs about $1
per 25 MJ, about how much will this cost?
C12M.5 Suppose we slowly pour water from a pitcher into
an insulated bucket 75 cm below the pitcher’s lip. If the
water’s temperature is exactly 22°C before its poured,
what is the temperature of the water in the bucket after
everything settles down?
C12B.11 A 180-g granite stone with a temperature of 100°C
is placed in an insulated bucket holding 850 g of water at
0°C. (Hint: Adapt the formula found in example C12.2.)
(a) What is the final temperature of the stone and water?
(b) How much energy flowed from one to the other?
C12M.6 Starting from rest, a railroad car rolls down a hill
and hits another identical car at rest. The cars lock together
after the collision. What fraction of the change in gravitational potential energy in this process is converted into
thermal energy in this collision? (Hint: The collision conserves momentum as well as energy.)
C12B.12 A 20-g gold cube at room temperature is placed into
an insulated cup containing 250 g of water at 100°C. (Hint:
Adapt the formula found in example C12.2.)
(a) What is the final temperature of the cube and water?
(b) How much energy flowed from one to the other?
Modeling
C12M.1 Suppose that in a version of the Joule experiment
shown in figure C12.1 the weights each have a mass of
10 kg and there is 8 kg (≈ 2 gal) of water in an insulated
container. About how far would the weights have to drop
to increase the water’s temperature by 0.5°C?
C12M.2 The space shuttle enters the atmosphere traveling at
a speed of roughly 8 km/s at an altitude of about 100 km,
but by the time it lands its speed has decreased to about
100 m/s. Note that the gravitational potential energy of the
earth–shuttle system also decreases during this p
­ rocess.
However, the shuttle’s temperature upon landing is not
much larger than it was in space.
(a) If the shuttle has a mass of 2 × 106 kg, how much total
energy has to be converted to some other form?
(b) Where must this energy go?
C12M.3 A 22-kg block of iron drops out of the back of a
pickup truck traveling at 55 mi/h. The block slides on the
horizontal road for 150 m before coming to rest. Assume
the block gets 60% of the thermal energy converted from
other forms by the friction interaction between the block
and the road, and the process happens so quickly that little
of the block’s thermal energy escapes as a heat flow to the
block’s surroundings.
(a) Use the momentum requirement to determine the friction force on the block.
(b) By how much does the block’s temperature increase?
C12M.4 A 65-kg stunt person jumps from a tower 65 m tall
into a tank of water shaped like a cube 3.0 m on a side.
The initial water temperature is about the same as body
temperature. After the splash and wave energy gets converted to thermal energy, by about how much has the temperature of the water increased in this process? Assume
the water gets 90% of the thermal energy that the splash
converts from other forms of energy, and that the process
goes too rapidly for the water to lose a significant amount
of energy to its surroundings or to the person.
C12M.7 Tarzan, holding a taut vine of length L that makes
an initial angle of θ with respect to the vertical, leaps away
from a branch and swings at the vine’s end. At the very
bottom of his swing, he ingloriously smacks into a tree and
comes to rest. The tree (being both rigid and a good thermal insulator) gets very little of the thermal energy that the
impact converts from other forms of energy.
(a) What is Tarzan’s approximate increase in temperature
just after colliding with the tree? Express your result in
terms of the given symbols and symbols for any other
quantities you might need.
(b) If L = 20 m and θ = 30°, calculate the numerical value
of Tarzan’s temperature change. Is this what will hurt
the most?
C12M.8 A certain satellite contains a gyroscope that helps
the satellite maintain its orientation in space. The gyroscope consists of a metal disk of radius R and mass M that
rotates at an angular speed │ω
W│ in a spherical housing that
is constructed of the same metal and has the same mass.
The gyroscope’s bearing suddenly breaks and the gyroscope flails wildly around in its housing until it comes to
rest. Assume that this happens so quickly that little heat
can be radiated into the vacuum of space, but that the
gyroscope and housing have time to come to the same
temperature. Suppose the metal has a specific heat of c. By
how much does the temperature of the gyroscope’s housing increase? Be sure to describe your assumptions.
C12M.9 Two iron balls of mass m are connected by a nearly
massless spring with spring constant ks and relaxed length L.
A person holding the balls compresses the spring to _2 1 L and
then drops the spring–ball assembly from a vertical distance
h above the bottom of an insulated bucket containing water
of mass M. (Note that because the bucket is an insulator,
even if the balls rub against the bucket’s walls, the walls
will get little thermal energy because thermal energy cannot easily flow into the bucket wall material.)
(a) After everything settles down, what is the change in
the water’s temperature? Express your result in terms
of the given symbols and symbols for whatever other
quantities you might need.
(b) If m = 200 g, ks = 2000 J/m2, L = 10 cm, h = 50 cm, and
M = 4.0 kg, what is the approximate numerical value
of this temperature increase?
Chapter C12
202
Thermal Energy
C12B.13 Suppose the driver of a car with a mass of M traveling at a speed │v
W│ needs to brake to rest while going
down a hill with a vertical height of h. Each of the four
disk brakes on a car consists of an iron disk with a mass m
that is connected to the car’s wheel and which is gripped
by caliper-like brake pads that squeeze against the disk
when the brakes are applied. In the process, the disk gets
the bulk of the thermal energy converted from other forms
by friction. Assume the braking process takes place slowly
enough so that the thermal energy can distribute itself
evenly throughout the disk, but quickly enough so that
little of each disk’s thermal energy escapes as heat to the
environment.
(a) By about how much does each disk’s temperature
increase? Express your result in terms of M, m, │v
W│, │g
W│,
h, and the specific “heat” of iron c.
(b) If M = 1800 kg, m = 8 kg, │v
W│ = 30 m/s (about 67 mi/h),
h = 40 m, and each disk’s initial temperature is 20°C,
what is each disk’s final temperature?
C12B.14 Consider an insulating plastic hollow cylinder of
mass m that is partially filled with lead shot with mass M.
This cylinder rolls without slipping at a constant speed
│v
W│ down an incline tipped at an angle θ with respect to
the horizontal. Very little of the thermal energy converted
from other forms by the lead shot sloshing around in the
cylinder goes to the cylinder walls: because it is a good
insulator, any thermal energy that ends up on the cylinder’s inner surface flows more easily to the lead shot than
to deeper inside the cylinder material.
(a) Determine the rates at which (1) the lead shot’s thermal energy and (2) its temperature increases. Express
your results in terms of M, m, │v
W│, θ, and whatever
other quantities you might need.
(b) If │v
W│ = 2.0 m/s, M = 2.0 kg, m = 1.0 kg, and θ = 20°,
what are the numerical values of these rates?
Derivation
C12D.1 We did not have to use absolute temperatures in
example C12.2. The only difference between the Celsius
and absolute temperature scales is that T = T[C] + T0, where
T0 is a constant equal to 273.15 K. Show mathematically
that if you substitute T[C] + T0 for T everywhere in equation
C12.14, the equation ends up looking exactly the same as
it did before, only with T[C] appearing in place of T everywhere. (This is ultimately because the basic conservation
of energy equation in this problem only involves temperature differences, which are the same for both scales.)
Rich Context
C12R.1 Suppose that in 2031 you invent the first practical
teleportation device. The only problem is that (since energy
must be conserved) the device must do something with
any gravitational potential energy changes involved when
you teleport to a different altitude. Suppose your device
either gives this energy to or takes it from the thermal
energy of the teleported person. You need to warn people
using the device not to exceed certain elevation changes.
What would be wise safe limits, do you think? Base your
answer on sound medical science, and cite your source.
C12R.2 Malevolent aliens threaten that if the world’s governments do not surrender, they will use their inertial
damping technology to stop the earth from rotating, which
will channel the kinetic energy in every cubic centimeter
due to the earth’s rotation into thermal energy in that same
cubic centimeter. Worried national leaders call on you to
report on the physical effects (others will report on ecological effects). By about how much would the upper mantle’s temperature at the equator increase if the aliens do
as threatened? Make (and describe) appropriate estimates.
ANSWERS TO EXERCISES
C12X.1 Consider the system to be apparatus and the earth.
The gravitational potential energy change in this case is
_____
ΔVg = −m│g
W│h = −(4.0 kg)(9.8 m/s2) (0.5 m)
2
s
(
)(
1
kg· m /s 4.186 J
@
)
This is enough energy to raise the temperature of 1 g of
water by 4.7°C, so it would raise the temperature of 4000 g
of water by 4.7°/4000 = 0.0012°C.
C12X.2 Equation C12.5 does apply to helium so
U th ≈ _32 NkB T = _ 32 (7.5 × 1023)(1.38 × 10−23
J/│
K)(295 │
K
)
= 4600 J
(C12.17)
If you have a typical (youthful) human mass of m = 55 kg,
________________
2
2
2(4600 kg
· m /s )
2U = ________________
m
│v
W│ =
____
= 13 __
th
·m
kg
1J
= 19.6 ______
2 __________
______
1 cal = 4.7 cal (C12.16)
2
2
@
then you would have to run at a speed of │v
W│ such that
U th = _ 12 m│v
W│2 to have this much kinetic energy, so
m
55 kg
s
(C12.18)
This is about 28 mi/h, so you in fact can’t run this fast.
C12X.3 (a) Q (The burner’s temperature is higher than the
pan’s temperature, so heat flows from burner to pan.)
(b) [E] (Microwaves carry energy into the cup: there is no
temperature difference involved.)
(c) W (Friction does work on the brake shoes.)
(d) W (If you press on the balloon’s surface and the surface moves inward, this does work on the balloon.)
(e) [E] (Electricity carries energy into the wire.)
C13
Other Forms of
­Internal Energy
Chapter Overview
Energy
E2
Vh
E1
0
Introduction
r3 r4
r2
E3
V(r)
r1
r
Figure C13.1
A simplified model of the effective
potential energy of an interaction
between atoms. To form a bond, the
atoms must approach each other with
an energy ≈E2, but then lose energy
to get to ≈E3 while r3 < r < r4.
In this chapter, we will explore yet more deeply hidden forms of energy and the many
ways energy can flow across a system boundary, broadening the range of interactions
and processes to which we can apply the law of conservation of energy.
Section C13.1: Bonds
A typical potential energy curve for a two-object system that can form a bond has a
valley flanked by barriers that keep the objects’ separation within a definite range
when the system’s energy is low enough (see figure C13.1). The curve shown at least
qualitatively describes the total interaction potential energy between two molecules
in a liquid or solid, between two atoms in a molecule, and between two nucleons
(protons or neutrons) in an atomic nucleus. The system will form a bond if, while the
objects happen to have a separation within the valley of V(r), some process removes
enough energy so that the system’s energy falls below the height of the outer barrier.
Note that the system must lose energy to form a bond. We can break a bond by
increasing the system’s total energy above the outer barrier, which requires energy.
Section C13.2: Latent “Heat”
Molecules in a gas condense to form a liquid by forming loose intermolecular bonds.
Molecules in a liquid freeze to form a solid by making tighter bonds with particular
neighboring molecules, creating a fixed lattice of molecules. Forming such bonds releases energy, and breaking them requires energy. We call the internal energy that a
substance contains when its intermolecular bonds are broken its latent energy U la.
When a substance condenses or freezes, U la decreases and that energy is released
(usually to thermal energy); when a substance melts or is vaporized, U la increases.
+ΔU th = −ΔU la = ML for condensation or freezing
−ΔU th = +ΔU la = ML for vaporization or melting
(C13.1)
• Purpose: These equations describe internal energy flows in phase transitions,
where ΔU th and ΔU la are the changes in an object’s thermal and latent energies,
respectively, M is the object’s mass, and L is the latent “heat” of transformation
for the process. (In a logical world, “heat” would be “internal energy.”)
• Limitations: These equations assume that latent energy is converted directly
and entirely into thermal energy and vice versa. This is typically true, but in
some situations, a substance undergoing a phase change may directly do work
on or receive work from its surroundings.
Changes in latent energy are typically on the order of 100s of kJ/kg, and so
are much larger than thermal energy changes in typical processes. During a phase
change, any energy that flows into or out of a substance goes to forming or breaking
bonds, not to changing the substance’s temperature.
204
Section C13.3: Chemical Energy
Chemical reactions rearrange bonds between atoms. Since such bonds are typically
much stronger than those between molecules, chemical reactions can release energies
on the order of 10s of MJ/kg of reactant. Changes in chemical composition indicate
that such reactions have taken place, and we can keep track of the energies involved
by including a chemical energy term U ch in a substance’s internal energy.
Section C13.4: Nuclear Energy
Nuclear reactions, which rearrange the still stronger bonds between protons and neutrons in a nucleus can release on the order of 100 TJ/kg of reactant. Nuclear reactions
that release energy include fusion reactions (where small nuclei are combined to create bigger nuclei with more bonds) and fission reactions (where excessively large
nuclei are broken up into more tightly bound fragments). Changes in nuclear composition indicate that such reactions have taken place, and we can keep track of the energies involved by including a nuclear energy term U nuc in a substance’s internal energy.
Section C13.5: Modes of Energy Transfer
Energy can be transferred across a system boundary by light (more generally,
­electromagnetic radiation), by mechanical waves (such as sound waves), by electric
­
currents, and by mass transfer. In this book, I will denote energy transferred via these
modes by the symbols [EER], [EMW], [EEC], and [EMT], respectively.
The intensity I of energy transferred is the energy per unit time per unit area that
crosses a boundary. The intensity of sound waves is often expressed in decibels: if β
is the intensity in decibels, then I (in W/m2) = I010 β/(10 db), where I0 = 10–12 W/m2.
Table C13.1 summarizes internal energy and energy transfer symbols.
Section C13.6: Mechanisms of Heat Transfer
Heat can flow across a boundary via any or all of these three mechanisms:
1. Conduction (across a boundary between objects in contact)
2. Convection (involving bulk motion of air or another fluid)
3. Radiation (through emission of electromagnetic radiation)
The section describes these mechanisms in detail.
All objects with nonzero absolute temperatures emit electromagnetic radiation.
The Stefan–Boltzmann law describes how much power is radiated, and Wein’s law
specifies the wavelength at which the peak power is radiated:
P = εσ AT 4 and
λpk = __
b where
T
b = 2.90 ____
mm
K
Table C13.3 Summary of
symbols for internal energies
and energy transfers
Form of
Internal Energy
Symbol
Rotational (= _ 12 I│ω
W│2)
U rot
Thermal (≈ Mc ΔT)
U th
Latent (= ±mL)
U la
Chemical U ch
Nuclear
U nuc
Form of
Energy Transfer
Symbol
Work (by external force)
Heat (due to T difference)
Electromagnetic radiation
Mechanical waves
Electrical current
Mass transfer
W
Q
[EER]
[EMW]
[EEC]
[EMT]
(C13.7, C13.8)
• Purpose: This equation describes the power P radiated by an object with surface area A at a temperature T, and the wavelength λpk at which the peak power
is radiated. The quantity ε describes the surface’s emissivity: ε ranges from
0 for a perfectly reflecting object to 1 for a perfect black body. The quantity
σ = 5.67 × 108 W/(m2K4) is the Stefan–Boltzmann constant. (Mnemonic: 5-6-7-8.)
• Limitations: These laws have no known limitations.
Section C13.7: A Comprehensive Energy Master Equation
We can finally state the law of conservation of energy in its broadest form:
ΔE = W + Q + [EER] + [EMW] + [EEC] + [EMT]
(C13.9)
where for a multiobject system, E includes a potential energy term V for every longrange inter-object interaction, a (center-of-mass) kinetic energy term K for each object,
and an internal energy U for each object (which we can further subdivide into U rot,
U th, U la, U ch, and U nuc, as needed). An example illustrates the power of this equation.
205
Chapter C13
206
C13.1
The characteristic potential
energy curve for a bond
Energy
E2
Vh
E1
0
r3 r4
r2
E3
V(r)
r1
r
Figure C13.1
A simplified model of the effective
potential energy of an interaction
between atoms. To form a bond,
the atoms must approach each
other with an energy ≈E2, but
then lose energy to get to ≈E3
while r3 < r < r4.
How to form a bond
Other Forms of Internal Energy
Bonds
In this chapter, we will explore most of the remaining important “hidden”
forms of internal energy as well as discuss some of the many ways systems
can transfer energy across a system boundary. This will greatly broaden the
range of situations to which we can apply conservation of energy.
The first step in this process is to explore how atoms and other particles bond to each other. Chapter C9 introduced us to a simplified model
of the bonding process, abstractly represented by the potential energy diagram shown in figure C13.1. Take the reference separation for the interaction between two atoms to be zero when they are infinitely separated. When
the atoms’ separation r is large, they behave like uncharged particles, so the
interaction force is very small, meaning that the slope of V(r) is very small, so
V(r) ≈ 0 for a long time as the atoms approach. But as the atoms get close, their
electron clouds begin to overlap, causing the clouds to repel each other more
strongly than they are attracted to the other atom’s approaching nucleus. This
means that V(r) begins to increase. When the atoms reach a certain separation, their electrons can slip into new configurations with lower potential
energy, corresponding to the valley in the V(r) function shown. As the atoms
get closer still, very strong repulsive forces (including electrostatic repulsion
between the positive nuclei) arise, making dV/dr strongly negative and driving the value of V(r) upward as r approaches zero.
This is a greatly simplified description, but gives us the general idea of
what happens as atoms interact. A realistic potential energy graph for an
interatomic interaction generally does look qualitatively like figure C13.1,
though the hill in the graph is commonly much lower (something like 1/10
the depth of the well). For certain pairs of atoms, however, the potential
energy graph might lack the hill; for others, the graph might lack the valley.
The potential energy for the interaction between two protons is also
qualitatively similar. The electrostatic repulsion between the protons at large
separations provides the outer slope of the hill. The attractive strong nuclear
interaction (which kicks in only at small separations) provides the valley’s
outer wall, and various strongly repulsive effects that come into play when
the protons’ separation is very small provide the valley’s rising inner wall.
For a proton or neutron interacting with a neutron, there is no electrostatic
repulsion, so the potential energy graph has basically only a valley.
The point is that the potential energy for many microscopic interactions
has this general shape. As long as the potential energy graph has a valley,
then the interacting objects can in principle form a bond that keeps the interparticle separation r within a limited range of values.
Let’s see how this might happen. Consider a pair of atoms whose interaction potential energy is as shown in figure C13.1. Suppose that the atoms
initially approach each other with a large separation but some kinetic energy.
This will give the system some positive total energy, perhaps something like
energy E1 shown in the diagram. An isolated system with such an energy will
not be bonded: the atoms’ separation can only decrease as far as r1, which is
a turning point in this case, before increasing back toward infinity.
Suppose we give the atoms a larger kinetic energy, so the system’s energy
is now E2 on the diagram. The atoms’ separation r can now decrease past the
barrier imposed by the outer hill. But the atoms are still not bonded: their
separation will simply decrease to the turning point at r2, and then increase
back to infinity again.
But now imagine that while those atoms happen to be somewhere in the
region between r3 and r4, some physical process occurs that causes the system
to transfer some energy to the system’s environment, causing the system’s
C13.1 Bonds
207
energy to drop to E3 on the diagram (as indicated by the large vertical arrow).
Now the atoms’ separation will be confined between the turning points at r3
and r4, meaning that their separation will not go back to infinity. The atoms
have therefore formed a bond that keeps their separation finite.
We see, then, that to form a bond, two things must happen:
1. The interacting objects must initially have a sufficiently large energy to
allow their separation to decrease past any outer barrier (hill) in the system’s potential energy function.
2. They must then lose enough energy to their surroundings while their
separation is in the valley region of the potential energy so that their
energy falls below the outer barrier’s height.
The process by which the system loses energy can be as simple as emitting a
photon that carries light energy away. More commonly though, the system
simply collides with a third atom in such a way that the third atom carries
away some of the system’s energy as kinetic energy.
Forming a bond therefore necessarily releases energy to the atoms’ surroundings. Conversely, if two atoms are already bound and we wish to break
that bond, we must supply energy to the system from the surroundings to
increase the system’s total energy above any outer barrier: only this will allow
the atoms’ separation to increase back to infinity, thus dissolving the bond.
For the sake of concreteness, I have described the bond-making or breaking process in terms of two atoms reacting, but the same general mechanism
describes how bonds form between molecules, atoms, and even subatomic
particles such as protons and neutrons.
This mechanism can help us understand one everyday puzzle. Why does
a fuel like hydrogen require a spark to ignite, but subsequently burns quite
merrily (indeed, explosively)? The basic answer is that at room temperature,
hydrogen and oxygen molecules simply don’t have enough random thermal
kinetic energy to get their separation past the outer barrier in their potential
energy function: the molecules simply bounce off each other. But a spark will
increase the temperature of a local region in the hydrogen–oxygen mixture
to the point where the molecules typically do have enough energy to get past
the barrier and start forming bonds. Once bonds begin to form in the region
of the spark, the energy released by bond formation increases the kinetic
energies of molecules in that region so much that the spark is no longer necessary to allow yet more molecules to get into the act: the reaction becomes
self-sustaining. Indeed, once started, the reaction region spreads quite rapidly until all of the available hydrogen molecules have been burned.*
Indeed, the fact that hydrogen and oxygen do not spontaneously burn
at room temperature allows us to put a lower limit on the height of the outer
barrier that must be present in the potential energy function of whatever
molecular interaction begins the chain. Since molecules at room temperature
have an average kinetic energy of about _ 32 kB T = 1.5(1.38 × 10–23 J/K)(295 K) ≈
4 × 10–21 J, the barrier must be at least this high. Indeed, it must be about seven
or eight times higher than this (something like 3 × 10–20 J), because _ 32 kB T is the
average kinetic energy, and some molecules will have energies significantly
larger. If this is so, though, using a spark to increase the temperature by a
factor of eight (to roughly 2400 K) will give even an average molecule enough
energy to get past the barrier.
⃯
*The details of how the chemical reaction 2H2 + O2
2H2O proceeds at the atomic
level is actually quite complicated, involving something like seven different sub-­
reactions between atoms and/or molecules, but the provided description still gives a
valid general sense of why a spark is required.
Making bonds releases energy;
breaking them requires energy
Why we often need a spark to
set something on fire
208
Chapter C13
C13.2
The definition of latent “heat”
Microscopic models for phase
changes
Phase changes can release
much more energy than typical
temperature changes
Other Forms of Internal Energy
Latent “Heat”
One of the macroscopic consequences of the issues discussed in section C13.1
is that when a substance undergoes a phase change (for example, from solid
to liquid or liquid to solid), it usually either absorbs or releases energy (almost
always from or to the substance’s thermal energy). The energy that a given
substance absorbs or releases per kilogram during a given change of phase
is called the latent “heat” for that process. In this section, we will see that
this energy flow is a consequence of making or breaking microscopic bonds
between molecules. (The quotation marks around “heat” again remind us
that in a logical world, we would say “latent thermal energy change.”)
The molecules of almost every kind of substance attract each other
weakly, making it possible to form weak bonds between molecules even if
the chemical nature of those molecules does not change. At high temperatures, the molecules have so much kinetic energy that the total energy of any
two-molecule system is typically much greater than zero, implying that the
molecules are unbound. A substance whose molecules are unbound is a gas:
gas molecules thus bounce freely and randomly back and forth between the
walls of whatever container holds the gas, completely filling its volume.
As the temperature of a gas decreases, though, the collisions between
molecules become less and less violent, allowing them eventually to form
weak bonds with each other. As such bonds form, the substance condenses to
form a liquid. In a liquid, a molecule will incessantly form and break bonds
with its neighbors, but will, on the average, have at least one or more bonds
active. This means that molecules are reasonably free to move around within
the liquid but still have a lower average potential energy than in a gas.
As the substance’s temperature decreases further, each molecule’s kinetic
energy becomes so small that it can begin to form permanent bonds with specific neighboring molecules. As these bonds form, molecules become essentially locked into specific locations relative to their neighbors in a more or
less rigid lattice, transforming the substance into a solid. The molecules will
still vibrate about these positions, but are no longer free to roam around.
So as a substance condenses from a gas to a liquid, intermolecular bonds
form, which releases energy into the substance’s reservoir of thermal energy.
Conversely, to convert a liquid to a gas, we must supply the same amount of
energy from the substance’s thermal energy in order to break those bonds.
For example, the energy required to vaporize 1 kg of water is 2256 kJ. This
is a lot of energy: if adding this much energy to a kilogram of water didn’t
vaporize it, it would increase its temperature by about 540 K! The energy
involved in making and breaking the intermolecular bonds associated with
phase changes is much greater than that associated with moderate changes in
a substance’s temperature.
Exercise C13X.1
Verify that supplying 2256 kJ of thermal energy to 1 kg of water would increase its temperature by about 540 K if the water were to remain a liquid
with the same specific “heat” as water at room temperature.
Similarly, when a liquid freezes to become a solid, the formation of new,
tighter intermolecular bonds also releases energy. Melting the solid requires
supplying the same amount of energy in order to break the bonds. The energy
required to melt 1 kg of water is 333 kJ.
C13.2 Latent “Heat”
209
So when we boil water in a pan on a stove, the thermal energy the stove
supplies goes to breaking the bonds that hold water molecules in the liquid.
It turns out that breaking these bonds soaks up all the energy that you supply during the phase change. If you attempt to raise the temperature of a
substance undergoing a phase change by supplying more energy, this energy
simply gets channeled to breaking bonds instead, making the phase change
more rapid but not increasing the substance’s temperature. So the boiling
water in a pan maintains a constant temperature of 373 K (that is, 100°C)
until all the water is boiled away. Similarly, a glass of ice water has a constant
temperature of 273 K (0°C) until the ice completely melts.
We constantly exploit these characteristics of phase changes in our daily
lives. For example, humans keep cool by sweating: as the sweat evaporates,
it absorbs thermal energy from the skin and carries it away. Putting an ice
cube in a drink cools it faster than putting in an equal amount of water at
0°C would: as the ice melts, it absorbs a lot of thermal energy from the drink.
Refrigerators work by forcing a liquid to boil in cooling coils inside the refrigerator (thus making the liquid absorb thermal energy from the refrigerator’s
contents) and then forcing the liquid to condense in coils on the refrigerator’s exterior (thus releasing this energy into the environment). Fruit growers
spray water on fruit trees to protect the fruit from a cold snap because the
fruit’s internal temperature will not drop below freezing until all the water
on the fruit’s outside has frozen (which may take longer than the cold snap
lasts). The fixed temperature of boiling water also makes predictable cooking
possible, as the boiling water in a pan (at sea level) exposes food in the pan to
a constant temperature of 373 K no matter what the source of heat might be.
We call the internal energy associated with a substance’s intermolecular
bonds its latent energy U la (“latent” because a change in this energy does
not manifest itself in a change in temperature, so the energy transfer is even
more hidden than usual). The energy that a given phase change requires or
releases per unit mass of substance is the latent “heat” L for that change:
+ΔU th = −ΔU la = ML for condensation or freezing
−ΔU th = +ΔU la = ML for vaporization or melting
(C13.1)
• Purpose: These equations describe energy flows in phase transitions,
where ΔU th and ΔU la are the changes in an object’s thermal and latent
internal energies, respectively, M is the object’s mass, and L is the latent
“heat” of transformation for the process.
• Limitations: These equations assume that latent energy is converted
directly and entirely into thermal energy and vice versa. This is typically true, but in some situations, a substance undergoing a phase
change may directly do work on or receive work from its surroundings.
Note that when a substance condenses or freezes, latent energy is converted
to thermal energy and so decreases; when it melts or vaporizes, thermal
energy is converted to latent energy which therefore increases.
Table C13.1 lists latent “heats” of transformation for various common
substances undergoing phase transitions.
I should note that, technically, most of the latent “heats” of vaporization
listed in table C13.1 implicitly involve some work energy as well as purely
latent energy. As a system transforms from being a liquid to being a much less
dense gas, its volume increases dramatically. Since the earth’s surrounding
Phase changes take place at a
constant temperature
Everyday applications of
phase change processes
Latent energy summarized
Table C13.1 Latent “heats”
of various substances
Substance
and Phase
Change
Melting O2
Melting N2
Melting H2
Melting Alcohol
Melting Al
Melting Cu
Melting Iron
Melting H2O
Melting Granite
Boiling N2
Boiling O2
Boiling H2
Boiling H2O
Boiling Cu
Boiling Iron
Boiling Al
Latent
“Heat”
(kJ/kg)
13.8
25.3
58.6
78
105
205
247
333
440
199
213
452
2,256
4,730
6,090
11,400
Chapter C13
210
Other Forms of Internal Energy
atmosphere pushes inward on this system, expanding the system against the
inward force exerted by atmospheric pressure does negative work on the
system (taking energy out of the system), so we must actually supply more
energy to vaporize the system than we would in a vacuum. Condensing the
system conversely does positive work. Since these works are done automatically and reversibly, we will brush all this under the rug and pretend that
all the energy we supply to vaporize a substance in the earth’s atmosphere
goes to increasing the substance’s internal latent energy. But beware of situations where you are vaporizing or condensing substances in a vacuum
or in another planetary atmosphere: the latent “heats” will not quite be the
same. (This is not such an issue with melting or freezing, because the volume
changes in such processes are typically small in comparison.)
Example C13.1
Problem: If energy from burning natural gas costs roughly 2¢ per megajoule,
how much does it cost to boil away 1 gal of water that is already at 100°C?
Solution One gallon is 4 quarts ≈ 4 liters ≈ 4 kg of water (a more accurate
estimate is pointless, since we don’t know the cost of energy very precisely).
Vaporizing this much water, even if it is already at the boiling point, involves
increasing its latent energy by ∆U la = +mL = (4 kg)(2.256 MJ/kg) = 9.0 MJ. If
this comes burning natural gas at a cost of 2¢/MJ (and no energy is wasted),
then boiling the water completely away will cost about 18¢.
Example C13.2
Problem: Suppose you put a 60-g ice cube (at 0°C) into a cup holding 250 g
(≈ 1 cup) of water at 15°C. What is the water’s final temperature?
System description
Solution The system is the ice cube and the water. Since everything is at rest,
external forces can do no work on the system, but we will have to assume the
process goes quickly enough that little heat flows across the system boundary (probably a bad assumption, but what else can we do?). We will handle
the contact interaction between the ice and water by keeping track of internal energies. We can usefully break this process into two steps: (1) find the
water’s temperature after the ice has completely melted to water at 0°C and
then (2) find the final temperature after the two batches of water (0.060 kg
of water at 0°C and 0.25 kg at the temperature we find at the end of the first
step) reach the equilibrium. As neither object has kinetic energy, the contact interaction has no potential energy, and the temperature of the ice does
not change in the first step, most terms in the conservation of energy master
equation for that step are zero, leaving simply
How the system is isolated,
with justification
(Implicit) list of the single
internal interaction and a
description of how it will
be handled
Assumptions stated
(Initial and final diagrams
are not crucial in this case)
Master equation
Symbol definitions
Symbol definitions, list of
knowns and unknowns
U thw,i + U lac,i = U wth, f + U cla, f ⇒ U wth, f − U thw,i + U cla, f − U lac,i = ΔU th
w + ΔU lac = 0 (C13.2)
where U
th
w is the water’s thermal energy, U
lac is the latent energy of the ice cube,
and the subscripts i and f mean “initial” and “final,” respectively. Note that
defining symbols for the initial and final energies here is awkward, and not
really necessary, as we are only really interested in the energy differences.
We can more efficiently in such cases jump straight to the last version of the
equation: conservation of energy implies that the change in this (allegedly)
isolated system’s total energy must be zero. If M = 0.25 kg is the mass of the
water, m = 0.060 kg is the mass of the cube, the latent “heat” for melting ice is
L = 333 kJ/kg (from table C13.1), the specific heat of water is c = 4186 J·kg–1 K–1
(from table C12.1), and the water’s temperature change is ∆T, then we have
C13.3 Chemical Energy
211
0 = +mL + Mc ΔT ⇒ mL = −Mc ΔT
(C13.3)
Algebra with symbols
(0.060 kg
)(333 kJ/kg
)
mL = −
_________________________
⇒ ΔT = − ___
= −19.1 K
Mc
(0.25
kg
)(4.186 kJ ·
kg 1 K-1)
(C13.4)
Calculation includes
and tracks units
Oops! This is absurd, since the water started at 15°C and its temperature
cannot fall below the ice’s temperature of 0°C! Such an absurdity is a sign
that one of our original assumptions (in this case, the assumption that the
ice completely melts) must be wrong. What must actually happen is that the
water’s temperature decreases to 0°C without melting all the ice.
We can double-check this conclusion by starting with equation C13.3, but
this time assuming that ∆T = –15°C = –15 K and solving for m, the amount
of ice that must have melted to get the water’s temperature to 0°C:
(0.25 kg)(4.186 kJ ·
kg-1 │
-1)(−15 │
K
)
K
Mc ΔT
m = − ______
= − _______________________________
= +0.047 kg
L
333 kJ / kg
(C13.5)
This makes sense, because this is less than 0.060 kg. So the water’s final temperature is 0°C, and 13 g of ice remains.
C13.3
Plausibility check
Revised list of knowns
and unknowns
Calculation includes
and tracks units
Final plausibility check
Chemical Energy
The bonds between the molecules of a substance are generally much weaker
than the bonds between the atoms in a given molecule. Chemical reactions,
which make and break atomic bonds, can therefore absorb or release much
more energy per kilogram of substance than is involved in a phase change.
For example, burning 1 kg of gasoline releases about 46 MJ of thermal energy,
roughly 20 times the thermal energy released by 1 kg of condensing water!
In everyday situations, if energy seems to disappear, it is probably going
to thermal energy, but energy that seems to appear magically is most likely
coming from chemical energy. Examples include the energy that human bodies release in the form of heat and/or work (which comes from chemical
energy in consumed food) and the energy that internal combustion engines
release (which comes from the chemical energy in gasoline). Chemical reactions can also absorb energy, but this is less typical. In either case, we can
represent changes in a system’s or object’s chemical energy by including a
chemical energy term ΔU ch in the conservation-of-energy master equation.
The unambiguous indication that chemical energies are involved, of
course, is an observable change in a system’s chemical composition. By keeping track of chemical changes during a process, one can predict how much
chemical energy is released or absorbed. Most of the chemical reactions of
interest to physicists involve burning some type of fuel in the earth’s atmosphere. Table C13.2 lists changes in chemical energy per kilogram of various fuels. Note that negative values of ∆U ch mean that energy is released as
chemical reactions create new, tighter bonds, lowering the system’s chemical energy. The table shows that burning nitrogen actually requires energy
(which is a good thing, because it means the atmosphere can’t catch fire!).
The chemical energy in food is typically measured in food calories, where
1 food calorie ≡ 1 Cal (with a capital C) ≡ 1000 cal ≡ 4186 J. So an energy bar
with 250 food calories supplies a bit more than 1 MJ of energy in a compact
package, enough energy to lift a 1-kg object 100 km into the air(!). Of course,
neither human bodies nor engines can convert chemical energy purely into
mechanical energy, because they inevitably produce some waste thermal
energy as well. (We will see why this must be true for engines in unit T.)
The energies involved in
chemical changes are larger
than those in phase changes
Table C13.2 Changes in
chemical energy for oxidizing
certain fuels (per kg of fuel)
Fuel Burned
∆U ch
(MJ/kg)
Hydrogen –240
Natural gas (methane)
–56
Gasoline –46
Coal (carbon)
–33
Glucose –16
Nitrogen (to NO2)
+2.4
(Negative values of ∆U ch mean that
energy is released. )
212
Chapter C13
C13.4
Nuclear reactions release far
more energy than chemical
reactions
Safety issues with nuclear
power production
Figure C13.2
The solar system’s only operating fusion power plant. Credit:
© ­PhotoLink/Getty Images
Other Forms of Internal Energy
Nuclear Energy
Protons and neutrons in an atomic nucleus form bonds that are much stronger than the bonds between atoms, mostly because the strong nuclear interactions involved are much stronger than the electromagnetic interactions
between atoms. Nuclear reactions can rearrange these bonds to form more
tightly bound nuclei, releasing enormous amounts of energy.
For example, a deuterium ( 2 H) nucleus contains a proton bound to a
neutron. A tritium ( 3 H) nucleus contains a proton bound to two neutrons. If
we force these nuclei together, they can rearrange the bonds to form a helium
( 4 He) nucleus with two protons and two neutrons, as well as a free neutron.
Physicists call this type of reaction a fusion reaction, since it involves bringing two small nuclei together to form a larger nucleus. The formation of new,
tighter bonds in this process releases 340 TJ (340 × 1012 J) of energy per kilogram of 2H-3 H mixture. This is roughly 7 million times the energy released by
burning a kilogram of gasoline, and represents enough energy to supply the
electrical needs of about 10,000 average U.S. households for a year. Nuclear
fission reactions (which involve breaking apart large uranium or plutonium
nuclei into smaller but more tightly bound fragments) can produce roughly
70 TJ per kilogram of fuel. Another promising nuclear reaction involves firing a proton at a boron nucleus (which contains 5 protons and 11 neutrons).
The reaction creates three tightly bound helium nuclei and releases 70 TJ per
kilogram of fuel. One advantage of this reaction is that it neither requires nor
releases any radioactive substances.
The enormous energies released by nuclear reactions make them an
attractive energy source, but it is not easy to produce this energy safely. All
currently operating nuclear reactors are fission reactors, which produce large
amounts of intensely radioactive waste. No one knows how to store this waste
safely for the millennia required to render it harmless, and so people do not
want it stored in their backyards. Fission plants also produce nuclear fuel
that can be used to make atomic bombs. Finally, the most common designs
for fission plants can (under unusual circumstances) fail catastrophically,
releasing large amounts of radioactive substances into the environment, and
addressing all these problems is very costly. For these reasons and others,
utilities in the United States are no longer building nuclear power plants.
Deuterium–tritium fusion reactors would produce more energy per kilogram from abundant fuel, would produce much less (but not zero) radioactive waste, would not produce materials that someone could use to make
bombs, and could not “melt down” the way fission reactors can. However,
commercially viable fusion reactors have been two decades in the future all
my life (although progress is made every year). Proton–boron reactors are
more difficult to imagine, because known methods for firing protons with
sufficient energy at boron nuclei requires more energy than one gets out of
the reaction. (A breakthrough in 2013 may make this approach to nuclear
power more promising, though.)
In spite of all these difficulties, one excellent and highly reliable fusion
reactor is currently operating. It has been designed to require no maintenance
for an enormous span of time, it has its own built-in radioactive waste disposal system, and it has been thoughtfully located at an appropriately safe
distance from all living things. I refer, of course, to the sun (see figure C13.2).
By virtue of the high pressures and densities at its core, the sun can
produce energy from fusion reactions that would be impossible in an earthbased reactor. A multistep nuclear process takes four hydrogen nuclei (protons) and fuses them into one helium nucleus (with two protons and two
neutrons), releasing 640 TJ per kilogram of hydrogen fuel.
C13.5 Modes of Energy Transfer
213
The definitive indication that nuclear energies are involved is changes
in the system’s nuclear composition. One can keep track of nuclear energies
by including a nuclear energy term ΔU nuc in the master equation. As with
chemical energies, ΔU nuc will be negative when nuclear energy is released.
C13.5
Modes of Energy Transfer
Rotational energy, thermal energy, latent energy, chemical energy, and
nuclear energy are (progressively more “hidden”) forms of internal energy.
I want to turn our attention now to “hidden” ways that energy can cross a
system boundary other than heat and work.
Perhaps the least “hidden” way of conveying energy into or out of a
system is light: a system that emits light loses energy, while a system that
absorbs light gains energy. The intensity I of light (don’t confuse this with
the moment of inertia!) expresses how much energy light transports into
or out of the system per unit time per unit area of the system boundary.
The units of intensity are (J/s)/m2 = W/m2. A system on the earth’s surface
receives about 1000 W/m2 across any boundary that directly faces the sun.
Visible light is just one type of electromagnetic radiation. Other (invisible)
forms of electromagnetic radiation include radio waves, microwaves, infrared
light, ultraviolet light, X-rays, and gamma rays. Like light, any of these types
of radiation can carry energy into or out of a system. We will denote energy
transferred by electromagnetic radiation using the symbol [EER].
Mechanical waves can also convey energy without actually transporting
anything material across the boundary. Mechanical waves involve a traveling
physical oscillation of some medium, like a ripple on a pond. Other examples
include sound waves and seismic waves. We will use the symbol [EMW] to
denote energy carried across a system boundary by mechanical waves.
The intensity of sound waves (in particular) is often expressed in decibels
(dB). The following formula gives the conversion from decibels β to intensity
I in the normal SI units of W/m2:
Four main modes of energy
transfer across a boundary
(other than heat and work)
Thus, a 120-db sound wave has an intensity of (10–12 W/m2)1012 = 1 W/m2.
Table C13.3 Summary of
symbols for internal energies
and energy transfers
Exercise C13X.2
Form of
Internal Energy
I = I0 ·10 β/(10
db) where I0 = 1.0 × 10-12 W/m2
(C13.6)
Roughly how much less intense is a 60-db sound wave (what you might hear
in an office) than a 120-db wave (loud enough to cause pain)?
One can also convey energy in the form of electricity. We will study how
this works in much more detail in unit E, but an electrical current flowing in
a wire can carry energy into a system from a power source such as a battery
or power plant. If our system is a power source, then electrical current carries
energy out. We will use the symbol [EEC] to denote energy carried across a
system boundary in the form of an electric current.
Finally, energy can be carried across a system boundary by matter
­transfer. For example, putting fuel into a car increases the car’s internal
(chemical) energy. Sand leaking out of a moving truck carries kinetic energy
out of the truck. We will use the symbol [EMT] to denote such energy transfers.
Table C13.3 summarizes the symbols for the various kinds of internal
energies and the various energy transfer symbols.
Symbol
Rotational (= _12 I│ω
W│2)
U rot
Thermal (≈ Mc ΔT)
U th
Latent (= ±mL)
U la
Chemical U ch
Nuclear
U nuc
Form of
Energy Transfer
Symbol
Work (by external force)
Heat (due to T difference)
Electromagnetic radiation
Mechanical waves
Electrical current
Mass transfer
W
Q
[EER]
[EMW]
[EEC]
[EMT]
214
Chapter C13
C13.6
Three important mechanisms
for heat transfers
Other Forms of Internal Energy
Mechanisms of Heat Transfer
While I am on the subject of energy transfers, let me more fully describe the
three ways heat can flow from one object to another. These are:
1. Conduction (across a boundary between objects in contact),
2. Convection (where air or some other fluid carries energy away), and
3. Radiation (through the emission of electromagnetic radiation).
The fundamental laws that
describe thermal radiation
I described the conduction mechanism in passing in chapter C12. When
we place two objects in physical contact, the vigorously moving atoms on the
surface of the hot object interact with more sluggish atoms on the cold object’s
surface, pepping them up. These enlivened surface atoms then interact with
atoms deeper inside the cold object, eventually spreading more feverish activity throughout the object. Meanwhile, the atoms on the hot object’s surface
have been slowed down by their interactions with the cold object’s surface
atoms, and eventually communicate their newfound calm to the rest of the
atoms in the hot object. The net effect is that the hot object has less internal
energy and the cold object more: energy is transferred across the boundary.
This process continues until all the atoms in both objects have the same average kinetic energy (meaning the objects have the same temperature).
Convection is a somewhat different process. The process begins like the
conduction mechanism described earlier: vigorously moving atoms on the
surface of a hot object in contact with air excite neighboring air molecules to
move more vigorously. But air whose bulk velocity is zero actually conducts
energy poorly, because molecules are far apart and so don’t communicate
as well as molecules in a solid do. But once the hot object has heated a thin
layer of air close to its surface, the hot air begins to rise, because it is less
dense than the surrounding air. This draws in new cold air toward the surface that the hot object can heat, while hot air moving away from the surface
carries its thermal energy away. This process much more rapidly transports
energy away from the hot object than it would if the air would remain at rest.
Indeed, the main point of the down in a down comforter is that all the tiny
down filaments keep the air in the bag from circulating in this way.
We will see in unit E that accelerating charged particles radiate electromagnetic radiation. Since the particles in any object whose temperature is
above absolute zero are in ceaseless random motion, such an object will automatically radiate electromagnetic radiation. How effectively an object radiates
at a given wavelength turns out to be related to how well the object absorbs
radiated energy at that same wavelength. A shiny or white object reflects
most of the energy that falls on it and so is also a poor emitter of radiation as
well. By contrast, a black body (which perfectly absorbs all wavelengths of
light) is also the best possible emitter of radiation. At the wavelengths emitted
by objects near room temperature, almost every nonmetallic object has ε ≈ 1.
Empirically, we find that the power (energy per unit time) that an object
radiates at an absolute temperature T is given by the Stefan–Boltzmann law:
P = εσAT 4
(C13.7)
• Purpose: This equation describes the power P radiated by an object
with surface area A at a temperature T. The quantity ε describes the
surface’s emissivity: ε ranges from 0 for a perfectly reflecting object
to 1 for a perfect blackbody. The quantity σ = 5.67 × 10–8 W/(m2 K4 ) is
the Stefan–Boltzmann constant. (Mnemonic: 5-6-7-8.)
C13.6 Mechanisms of Heat Transfer
• Limitations: This law has no known limitations. It can be derived from
quantum field theory and the fundamental definition of temperature.
This is also the power per unit area absorbed by an object if the object’s surroundings have a uniform temperature T. Thus, an object having the same
temperature as its surroundings loses no net heat due to radiation.
An object radiates electromagnetic radiation over a broad range of wavelengths (see figure C13.3). However, the wavelength corresponding to the
peak of the curve depends in a simple way on temperature:
λpk = __
b T
where
b = 2.90 ____
mm
K
(C13.8)
relative dP/dλ
215
1.0
0.5
0
0
1
2
3
λ/λpk
4
5
Figure C13.3
This graph displays the relative
power per unit wavelength emitted by an ideal black body as a
function of the wavelength.
• Purpose: This expression (Wien’s law) gives the wavelength λpk corresponding to the peak of the blackbody emission curve as a function
of absolute temperature T.
• Limitations: This law also has no known limitations.
Objects at room temperature (295 K) emit light with a peak wavelength of
about 0.01 mm = 10,000 nm. Because the human eye cannot see light with
wavelengths larger than 700 nm (deep red light), this is invisible. However,
an infrared camera can easily display this radiation (see figure C13.4).
Exercise C13X.3
Suppose we can begin to see an object glowing in the visible range if it
has a temperature such that _ 13 λpk = 700 nm. (The curve in figure C13.3 turns
sharply up at about _13 λpk . Note that we can only see wavelengths to the left
of whatever corresponds to 700 nm on this graph.) What would the temperature of such an object be? Does this seem consistent with your experience?
Figure C13.4
An infrared photograph of the
author in a lounge at Pomona
College. The camera reads the
temperature of each point by
determining brightness of the
infrared light from that point.
Note how the author’s nose,
hands, and glasses are much
colder than his face. You can also
see that inanimate objects surrounding the author also radiate
infrared light, and a glass object
on the table reflects infrared
light from the author toward the
camera. The refrigerator in the
background is mostly darker than
its surroundings except for the
seals around the doors, which
are heated to prevent frost from
forming. Credit: D. Haley and
T. Moore.
216
Chapter C13
C13.7
A comprehensive conservationof-energy master equation
Other Forms of Internal Energy
A Comprehensive Energy Master Equation
At this point, we at last have a reasonably complete picture of the ways that
a system might contain or transfer energy. A comprehensive conservationof-energy master equation for a system of interacting macroscopic objects is:
ΔE = W + Q + [EER] + [EMW] + [EEC] + [EMT]
(C13.9)
where the system’s total energy E contains a potential energy term V for each
long-range interaction between system objects, a (center of mass) kinetic
energy term K for every system object, and an internal energy term U for
every object (which we can further break down into U rot, U th, U la, U ch, and/or
U nuc, as needed.). This general master equation gives us the power to apply
the conservation of energy to an extremely broad range of practical situations.
The following example illustrates how we can use this general formula
to solve a problem using two different choices of “the system.” (You might
practice annotating this solution yourself.)
Example C13.3
Problem: Beth, whose mass is 52 kg, climbs a hill 400 m high on a day when
the outside temperature is about 98°F (37°C). She evaporates about 0.5 kg
of water (about a pint) from her skin and lungs in the process. Estimate the
amount of food energy that she “burns” doing this.
Solution Initial and final diagrams appear below:
Initial:
Beth’s evaporated
water, mass m
Final:
z
zf
Beth,
mass M
zi = 0
zi 0
zf = 400 m
m = 0.5 kg
M = 52 kg
g = 9.8 m/s2
L = 2256 kJ/kg
∆U ch = ?
Internal interactions:
• Gravitational: Vg = m|g|z
Vg = 0 at z = zi = 0
• Contact with water: keep
track of U la, U th, U ch
• Contact with air: keep
track of U th, U ch
• Contact with ground:
ignore (see below)
We could choose the system here in a number of ways, ranging from Beth
alone to Beth + earth (taking the air and hill as being part of the earth). Each
choice has its advantages and disadvantages. Let’s choose the system to be
Beth and the earth. This system has the advantage of being isolated because
it floats in space and does not significantly lose heat to space (at least because
of what Beth is doing). It also has the advantage of making the gravitational
interaction an internal interaction, which we can conveniently handle using
the near-earth gravitational potential energy formula Vg = m│g
W│z. The evaporation of the water will involve the latent energy of the water, the thermal
energy of both the water and Beth, and ultimately some chemical energy in
Beth, so we will keep track of all these things. Beth’s contact interaction with
the air could in principle involve an exchange of heat with the air, but since
C13.7 A Comprehensive Energy Master Equation
217
the temperature of the air is the same as the temperature of Beth’s body, no
heat will flow from Beth to her environment. This is even true of thermal
radiation: though Beth will radiate furiously, the environment will radiate it
right back at the same rate. The net heat flow is therefore zero between Beth
and her environment (the air, mostly), so we will ignore this contact interaction. We can also ignore her contact interaction with the ground: except for
the few occasions where her foot slips on a stone or snaps a fallen branch, her
feet are motionless whenever they actually touch the ground. Therefore, this
interaction does no work on either her or the ground, and so effects no transfer of energy between them. This means we can ignore this internal interaction. If we consider Beth to be at rest both initially and finally, then the change
in her kinetic energy is zero, as is the earth’s. Finally, both Beth and the environment maintain the same temperature (98°F) throughout, so their thermal
energies do not change. Therefore, the only energies in the system that can
change are the latent energy of the water U law , Beth’s chemical energy U ch
,
B
and the potential energy of the gravitational interaction. The conservation­of-energy master equation in this situation therefore reduces to:
0 = ΔE = ΔU law + ΔU ch
B + ΔVg = + mL + ΔU ch
B + M│g
W│(zf − zi)
⇒
ΔU ch
B = −mL − M│g
W│zf
(
)
( )
(
)
J
1J
= −(0.5
) 2,256,000 ___
kg
− (52
) 9.8 __
kg
m2 (400 m) __________
kg
s
1
kg·m2/s2
@
(
)
= −[(1.128 + 0.204) × 106 J] ______
1 Cal = −320 Cal
4186 J
@
(C13.10)
We see that the units work out and this process requires about 320 food calories of chemical energy from Beth, which seems reasonable. (Note that most
of the energy goes to sweating!)
It might be instructive to see what this solution looks like if we take the
opposite extreme and take Beth alone to be the system. Then, her interactions
with her surroundings become external interactions. Beth herself has kinetic,
thermal, and chemical energies, but of these, only her chemical energy
changes significantly in the process. She participates in an external gravitational interaction with the earth and external contact interactions with the
air and the ground. The gravitational interaction does work on her center of
mass as she climbs the hill. Since the gravitational force is purely downward,
W
the work done each step is dWg = F
g · d rWC M = Fg,z dz = (−M│g
W│) dz, where I used
the component expression for the dot product. Since M│g
W│ is a constant, the
total gravitational work done on Beth as she climbs is Wg = −M│g
W│Δz. Beth’s
contact interaction with the ground does zero work on her, because her feet
are at rest when they touch the ground. The only other thing that happens is
that there is a mass transfer of water leaving her skin and lungs, which carries away the latent energy mL that the water gained from Beth in the process
of evaporating. There is no net heat transfer across Beth’s boundary, because
Beth and her environment have the same temperature. So the conservationof-energy master equation in this case says that
ΔU ch
B = ΔEB = Wg + [EMT] = −M│g
W│Δz − mL
which is the same as we found before (as it must be).
(C13.11)
Chapter C13
218
Other Forms of Internal Energy
TWO-MINUTE PROBLEMS
C13T.1 Suppose the interaction between two atoms has the
effective potential energy curve shown below:
10
0
–10
0.1
0.3
0.5
0.7 nm
r
V(r)
I have marked the vertical scale on this graph using an
arbitrary energy unit we’ll call bondits.
(a) Suppose we know that the system has 5 bondits of
kinetic energy when its atoms are separated by 0.2 nm.
What minimum energy is required to break the bond?
(b) Suppose instead we know that at t = 0 the atoms are at
rest at a separation of 0.4 nm. What minimum energy
is required to break the bond in this case?
(c) If the atoms have 10 bondits of kinetic energy at infinity, what energy must we remove to form a bond?
A. Only a smidgen (less than a bondit)
B. 5 bondits
C. 10 bondits
D. 15 bondits
E. 20 bondits
F. The bond is already broken (or we can’t form a bond).
C13T.2 Suppose we put a 0.3-kg hunk of ice at 0°C into an
insulating thermos bottle filled with 1000 g of water at
20°C. What will be the system’s final temperature?
A. Below 0°C
B. Almost exactly 0°C
C. Somewhat above 0°C, but below 10°C
D. Very roughly 10°C
E. Somewhat below 20°C, but above 10°C
F. Almost exactly 20°C
C13T.3 The thermal energy of a block of ice at 0°C melting
to a puddle of water at 0°C in a cup at room temperature
A. Increases.
B. Decreases.
C. Remains the same.
C13T.4 An egg will cook no more rapidly in furiously boiling water than in gently simmering water. T or F?
C13T.5 A 100-g sample of a certain substance undergoes
a transformation of some kind that releases 20,000 J of
energy. What kind of transformation is this likely to be?
A. A temperature change
B. A phase change
C. A chemical reaction
D. A nuclear reaction
E. It is impossible to guess.
C13T.6 Suppose you climb about 10 stories worth of stairs.
Roughly what is the minimum number of food calories
you have burned? (Select the closest.)
A. 70,000 Cal
B. 4,000 Cal
C. 70 Cal
D. 4 Cal
E. Less than 1 Cal
C13T.7 If the sound level increases by 20 decibels, by about
how much has the intensity of sound (in W/m2) increased?
A. 2 times
B. 10 times
C. 20 times
D. 100 times
E. 200 times
F. Some other factor (specify)
C13T.8 Suppose sand is leaking from an unpowered but
moving railroad car. Since the sand is moving forward
along with the car as it leaks out, it carries kinetic energy
out of the car. This mass transfer will
A. Cause the car’s speed to increase.
B. Cause the car’s speed to decrease.
C. Have no effect on the car’s speed.
C13T.9 Suppose an unpowered but moving railroad car
receives some coal (basically at rest) from a stationary conveyor belt. This coal therefore only carries chemical energy
into the car. This mass transfer will
A. Cause the car’s speed to increase.
B. Cause the car’s speed to decrease.
C. Have no effect on the car’s speed.
C13T.10 According to the Stefan–Boltzmann law, an object
at room temperature that is sitting in a room (also at room
temperature) must emit electromagnetic radiation. Since it
is losing energy by emitting this radiation, why does its
temperature remain constant?
A. It receives heat by conduction from the air and from
what it is sitting on.
B. It receives heat by convection from the air.
C. It receives heat by radiation from objects in the room.
D. All of the above.
E. Its temperature actually does decrease.
F. It does not actually emit any radiation.
T. Some other explanation (specify)
C13T.11 The emergency blankets in some first-aid kits consist of very thin Mylar that has been coated with aluminum
to make it shiny. How can such thin plastic be a blanket?
(a) Which mechanism of a person’s heat loss is most effectively suppressed by the blanket?
(b) Which mechanism does it least effectively suppress?
A. Conduction
B. Convection
C. Radiation
Homework Problems
C13T.12 Suppose a star has twice the surface temperature of
the sun and also twice the radius. How many times larger
is the rate at which this star emits energy compared to the
rate at which the sun emits energy?
A. It radiates at the same rate as the sun.
B. 2 times
C. 4 times
D. 8 times
E. 16 times
F. 32 times
T. 64 times
C13T.13 A small person with a surface area of about 1.0 m2
must (by the Stefan–Boltzmann law) radiate energy at a
rate that would require eating 11,000 food calories a day if
they are naked in a vacuum in deep space. Which do you
think is the most important reason that someone sitting in
a normal room requires less than 2000 calories a day?
219
A.
B.
C.
D.
E.
F.
Wearing clothes reduces the radiation loss.
Wearing clothes reduces heat loss due to convection.
A person has an emissivity ε much smaller than 1.
The person absorbs radiation from the room.
The surrounding air insulates the person.
Something else (specify).
C13T.14 A dark object sitting in sunlight gets warm. The sun
radiates light because it is very hot, much hotter than the
object. So should we categorize the radiation that the object
receives from the sun as being heat Q or energy transferred
by electromagnetic radiation [EER]? Be prepared to justify
your answer with an argument (multiple reasonable arguments are possible).
A. Heat Q
B. Energy transfer [EER]
C. It depends on how we define the system boundary.
D. It doesn’t matter.
HOMEWORK PROBLEMS
Basic Skills
C13B.2 Suppose a stove burner provides energy at a rate of
4500 W. What is the minimum time required to melt 1 qt
(about 800 g) of ice in a pan placed on that burner?
C13B.8 Very strenuous activity might cause someone to
evaporate 30 g of sweat per minute. At what rate (roughly)
does this remove energy from the person’s body?
(a) Express your answer in watts.
(b) Express your answer in food calories per hour.
(c) A person also might exhale 25 mg of evaporated water
per breath. If the person is breathing 15 times a minute,
is this a significant energy loss compared to sweating?
C13B.3 A standard hair dryer produces heat at a rate of
2500 W. What is the maximum amount of ice you could
melt in 1 min?
C13B.9 Electrical energy is usually measured in kW·h,
which is the total energy used by something that uses it at
a constant rate of 1000 W for 1 h. What is 1 kW·h in joules?
C13B.4 Suppose a natural gas furnace produces heat at a
rate of 20 kW. How much gas does it use per hour?
C13B.10 Before people understood nuclear fusion, it was
difficult to explain how the sun could keep shining over
geological time spans. From its gravitational effects, we
know that the sun has a mass of 2.0 × 1030 kg, and it radiates energy at 3.9 × 1026 W. If the sun were to consist of an
ideal mixture of hydrogen and oxygen, how long could it
last? (The result was used by some conservatives to argue
that the earth could not be as old as geologists claimed.)
C13B.1 Answer the questions posed in problem C13T.1,
and describe your reasoning.
C13B.5 The current total energy consumption by the United
States is very roughly 1020 J/yr. If we could produce all
of this energy by proton–boron nuclear reactions, at what
rate would we use up hydrogen–boron fuel (in kg/yr)?
(Currently known deposits of boron contain about 1010 kg.)
C13B.6 The currently brightest known star is R136a1 (in
the Large Magellanic Cloud) which is about 8.7 million
times more luminous than the sun. Its surface temperature
is about 53,000 K (the sun’s is 5800 K). What is its radius
compared to that of the sun?
C13B.7 Consider the case described in problem C13T.13.
(a) Verify that a small naked person in deep space requires
11,000 food calories a day just to supply the energy that
the person radiates.
(b) Answer the question posed by that problem, and justify your response using logic, data, and/or a calculation. Note that clothes also radiate energy, and that
equation C13.7 also describes the energy absorbed by a
surface from surroundings at temperature T.
Modeling
C13M.1 Suppose we place a 120-g block of ice at 0°C in an
insulated thermos containing 420 g of water at 22°C.
(a) What is the water’s final temperature?
(b) Does any ice remain? If so, how much?
C13M.2 Suppose we place a 12-g block of ice at 0°C in an
insulated thermos containing 450 g of water at 22°C.
(a) What is the water’s final temperature?
(b) Does any ice remain? If so, how much?
C13M.3 What is the minimum amount of ice that would be
able to cool 15 kg of lemonade in an insulated container
from 25°C to 0°C?
220
Chapter C13
Other Forms of Internal Energy
C13M.4 Suppose we pour 5 g of water at 295 K into an insulated container holding a large amount of liquid nitrogen
at 77 K. How much nitrogen gets boiled off?
C13M.5 On your desert island hideaway, you want to generate electrical power for your 60-W computer using a generator attached to a hanging 32-kg (70-lb) weight. When you
want to use the computer, you lift the weight 5.0 m into
the air (about 16 ft), wrap a rope around the generator’s
axle, and then let the weight sink to the ground, turning
the generator axle as it does. About how long can you use
your computer every time you lift the weight? (Assume
your generator is 100% efficient.)
C13M.6 Suppose a 65-kg hiker burns nearly 1000 Cal while
climbing a mountain 1300 m high. (a) What fraction of the
chemical energy is converted to “hidden” forms in the
environment and (b) what forms are most likely?
C13M.7 A certain solid-propellant model rocket engine
releases 6000 J of chemical energy when burned. Suppose
it lifts a 320-g model rocket to an altitude of 270 m.
(a) What fraction of the engine’s energy goes to energy in
the environment?
(b) In what form(s) is this energy most likely to appear?
C13M.8 Suppose you were to eat 1 kg of snow. Your body
will burn whatever food energy resources it needs to
maintain your internal temperature of 37°C. How many
food calories must your body burn as a result of your meal
of snow? (Note: I don’t recommend this as a diet plan.)
C13M.9 Estimate the time needed for sunlight alone to
melt an iceberg sitting in 0°C water. Model the iceberg as
initially being a cube 100 m on a side with its upper face
horizontal. At a reasonably northern latitude, the average intensity of sunlight falling on a horizontal surface
considering night and clouds is very roughly 100 W/m2.
Ice has a density of 910 kg/m3. (Hint: As the top surface
melts, it will run off, and the rest of the floating iceberg
will rise. What, if anything, will happen to the iceberg’s
top surface area?)
C13M.10 In the classic science-fiction novel The Legacy of
Heorot by Niven, Pournelle, and Barnes (Simon & Schuster,
1987), alien predators called “grendels” are able to accelerate to highway speed within seconds and continue producing power at a similar rate as they attack their prey.
Indeed, their power production is so large that they are
forced to cool themselves after an attack by retreating to
water. Suppose that grendels can accelerate to 30 m/s in
3 s and can continue to produce work at about this rate
during an attack. Mammalian muscles are about 20% efficient (that is, they use 5 times as much chemical energy
as the work they put out), and the heat capacity of flesh
is about 3400 J/K. Assuming that this roughly applies to
grendels as well, and assuming that these reptilian creatures don’t sweat, at what rate will a grendel’s temperature
increase during an attack? (This temperature increase is a
weakness that humans in the story are able to exploit.)
C13M.11 The intensity of solar radiation above the earth’s
atmosphere is about 1300 W/m2. The earth’s average surface temperature is relatively constant over geological time
spans, so the energy the earth receives from the sun must
be balanced by energy the earth reradiates in all directions
into space. If the earth were to have a uniform temperature
over its entire surface, what would that temperature be?
(The fact that the earth’s average temperature has historically been ≈ 15°C instead of what you calculated is due to
the greenhouse effect of gases in the earth’s atmosphere.)
Derivation
C13D.1 (Requires differential calculus.) For modest temperature differences, we empirically find that rate dQ/dt
at which a hot object at temperature Th loses heat to colder
surroundings at temperature Tc (through all mechanisms) is proportional to the temperature difference Th – Tc:
dQ/dt = K(Th – Tc) where K is a constant. Assume that Tc
is fixed.
(a) Argue that H ≡ Th – Tc obeys the equation
dH = −bH
___
dt
(C13.12)
where b is a constant.
(b) Argue that the expression H(t) = H0 e −bt satisfies this
expression. (This is called Newton’s law of cooling.)
(c) If your coffee cools from 90°C to 40°C in 8 min when in
a room at 22°C, what is the value of b?
C13D.2 For modest temperature differences across a building wall, the rate │dQ/dt│ at which heat travels through the
wall is very nearly proportional to the temperature difference ∆T across the wall and to the wall’s area A:
| |
dQ
___
≈ __
A ΔT
R
dt
(C13.13)
where R is a constant that people call the wall’s “R-factor.”
(This rate includes transport via all three mechanisms.)
Higher values of R correspond to better insulation (less
heat flowing per unit time across the wall).
(a) What are the SI units of R?
(b) In the United States construction industry (which still
cherishes quaint 19th-century British customs regarding measurement), energy is measured in British Thermal Units (1 Btu = 1055 J), wall areas are expressed
in square feet, temperature differences in degrees
­Fahrenheit, and time in this context is measured in hours.
What is the conversion factor between 1 ft2·°F·h/Btu
and the units you found in part (a)?
(c) A reasonably well-insulated wall in a building might
have an R-factor of 18 in the British units. At what rate
(in watts) will heat flow through a 20 ft by 10 ft wall if
it is 40°F outside and 70°F inside?
(d) Suppose a window with area A1 with an R-factor
R1 is placed in a wall with area A2 with R-factor R2.
Argue that the net effective R-factor for the entire wall
(including the window) of area A = A1 + A2 is
(
)
(
)
A -1
A
R1R2
R = A ___
1 + ___
2 = A ___________
R1 R2
R2A1 + R1A2
(C13.14)
Answers to Exercises
221
C13D.3 Consider an object at absolute temperature T that
radiates to its surroundings. The surroundings, at a fixed
temperature T, radiate back.
(a) Argue that the Stefan–Boltzmann law (equation C13.7)
must also describe the rate at which an object of area
A and emissivity ε must absorb energy from surroundings at temperature T. (This is why an object’s emissivity is related to its reflectivity.) (Hint: If the object
has the same temperature as its surroundings, it is in
equilibrium: its temperature cannot change.)
(b) Now suppose the object has an absolute temperature
T + ∆T. Argue that if ∆T/T << 1, the net power per
unit area that the object radiates is nearly proportional
to ∆T and evaluate the constant of proportionality in
terms of the fixed temperature T, the object’s emissivity ε, and the Stefan–Boltzmann constant σ. [Hint: By
multiplying it out, argue that (1 + ∆T/ T)4 ≈ 1 + 4 ∆T/T
if we drop terms involving higher powers of ∆T/ T.]
Rich Context
C13R.1 You are planning a 5-day backpacking trip where
you plan to use a gasoline cook stove for about 30 min
each morning and night. The description of your cook
stove brags that the stove can heat 1 L (about a kilogram)
of water to boiling in about 12 min.
(a) Estimate the minimum amount of gasoline you will
need to take on your trip.
(b) Suppose the primary reason your stove loses energy to
the environment is radiation. Estimate how much more
gasoline you will need to handle that, if your cooking
pan is a cylinder 20 cm in diameter and 15 cm high.
[Hint: The emissivity of almost everything at thermal
wavelengths ≈ 1. Don’t neglect return radiation from
the environment: see problem C13D.3(a).]
C13R.2 Suppose your car can travel 35 mi on 1 gal of gas
when traveling on a level road at 60 mi/h. Estimate your
gas mileage when traveling at the same speed up an
incline that gains 3 m of elevation for every 100 m along
the slope (not horizontally). (Such an incline is called a 3%
incline.) Assume that your car and passengers have a mass
of 1500 kg. (Hints: “Gallons per mile” is a rate of energy
usage that can be converted to other rates. Gasoline has a
density of about 720 kg/m3.)
C13R.3 In this problem, we will consider some of the challenges in designing a solar-heated house. For the sake of
simplicity, suppose the house is a simple, one-room cabin
20 ft wide, 15 ft deep, and 10 ft tall. The floor consists of a
6-inch thick concrete slab, and the walls and ceiling consist of lighter materials that store little thermal energy.
All surfaces are insulated on the outside. Suppose also
that the temperature outside is a constant 30°F (day and
night). We find by consulting tables of data on building
materials that concrete is able to store 32 Btu per cubic
foot (1 Btu = 1 British Thermal Unit = 1055 J) whenever
its temperature increases by 1°F. Assume that all interior
temperature changes are sufficiently slow that all parts of
the building inside the insulation always have the same
temperature. Suppose that at the end of a sunny day, the
house’s interior has a temperature of 75°F
(a) What R-factor (in British units) must the insulation surrounding the house have if we insist that the house’s
interior temperature cannot fall below 65°F during a
14-hour night. [Hints: See problem C13D.2 for a definition of “R-factor.” See also problem C13D.1(a).]
(b) A fairly standard R-factor for walls in modern buildings is roughly 20 ft2·°F·h/Btu. Does your solar house
need extraordinary insulation?
(c) South-facing windows might admit something like
an average of 400 W/m2 during a sunny 8-hour day.
Assuming the windows have the same R-factor as you
calculated in part (a), how large would your windows
need to be to admit enough energy to raise the house’s
temperature back to 75°F during the day? (Don’t
neglect outward heat flow during the day!)
(d) The R-factor of even an extremely well-insulated window might be something more like 4 ft2·°F·h/Btu,
so the assumption in part (c) is pretty bad. We know
what effective average R-factor we want for the entire
house’s surface from part (a). Use the result of problem
C13D.2(d) to re-calculate what R-factor we need for the
house’s surface area that is not windows.
ANSWERS TO EXERCISES
C13X.1 If we assume that the specific “heat” of water c
remains fixed, then we have ΔU th ≈ Mc ΔT = 2256 kJ for
M = 1 kg of water implying that
th
2,256,000 J
ΔT = _____
ΔU = __________________
= 540 K
Mc
(1 kg
)(4186 J/(kg
·K)
(C13.15)
C13X.2 Let I1 be the intensity at β1 = 60 db and let I2 be the
intensity at β2 = 120 db. Then
1
I 10 β /(10 db) 10 6
I
__1 = __________
0 β/(10 db) = ____
= 10-6 ⇒ I1 = 10-6 I2
I2 I0 10
1012
2
(C13.16)
C13X.3 Equation C13.8 implies that
700 nm ≡ λred = _13 λpk = ___
b
3T
-3
2.90
×
10
m·K
b
_____
_______________
⇒ T =
=
≈ 1400 K
3λred 3(700 × 10-9 m)
(C13.17)
This seems plausible: I know from experience that hot
objects start glowing visibly at temperatures ≈1000°C,
which would be about 1270 K. For a better estimate, we’d
need to know both more about the human eye’s sensitivity and also about the details of what the curve looks like
below _ 13 λpk. We do get at least the right order of magnitude!
C14
Collisions
Chapter Overview
Introduction
This is the summer-movie chapter of the unit, where we explore some of the implications of the material in the entire unit to spectacularly sudden and intense interactions
such as impacts and explosions. We will see that conservation of momentum, angular
momentum, and energy all work together to help us determine what must happen in
such collisions and how energy is ultimately distributed between its various forms.
Section C14.1: Types of Collisions
An elastic collision is a collision in which the colliding objects’ kinetic energy is conserved. While collisions between microscopic systems such as atoms can be truly
elastic, most collision processes between macroscopic objects are inelastic, meaning
that some of the objects’ kinetic energy is converted to internal energy (although in
some cases, so little that the elastic model is a good approximation). A collision where
the objects stick together is completely inelastic: such a collision converts as much
energy as possible to forms of internal energy. We can consider an explosion to be a
superelastic collision that converts internal (chemical) energy to kinetic energy.
Section C14.2: One-Dimensional Collisions
The law of conservation of momentum by itself provides enough information to
determine the outcome of a one-dimensional and completely inelastic collision
­
­between two objects, and so determines the fraction of the system’s energy that must
go to internal energy in the collision. In a one-dimensional elastic collision between
two objects, conservation of momentum and energy together provide enough information to completely determine the final velocities of two objects from their masses
and initial velocities. In particular, if an object with mass m1 and x-velocity +│v
W0│ hits
an object of mass m2 at rest, the two objects’ final x-velocities v1x and v2x in an elastic
collision are given by
m
2 │v
v1x = _____
1 − b │v
W0│, v2x = _____
W0│, where b ≡ ___
m2
1
1+b
1+b
(C14.9)
These examples introduce some valuable techniques for solving collision problems.
Section C14.3: Two-Dimensional Collisions
A collision between a moving object and a stationary object will most generally be
a two-dimensional collision. In a two-object two-dimensional elastic collision, if we
know the objects’ mass ratio, their initial velocities, and a single piece of information
about the objects’ final velocities (such as the direction of one), we can completely
determine both final velocities. In an inelastic collision, we need two pieces of information about the final velocities, but we can also determine how much energy was
converted to the objects’ internal energies.
222
Section C14.4: The Slingshot Effect
A close encounter with a planet can dramatically increase a spacecraft’s speed. NASA
space probes often use this slingshot effect to reduce the fuel required for a mission.
In this section, we will see that we can model such an encounter as a two-dimensional
elastic collision, and use the techniques developed in the previous section to calculate
the boost in speed.
Section C14.5: Using All Three Conservation Laws
In this section, we will consider some example collisions that leave one or more
­objects rotating. Such collisions involve conservation of angular momentum as well
as momentum and energy. We will see that the constraints imposed by conservation
of momentum and angular momentum usually determine the outcome of a completely inelastic collision (where objects stick together afterward).
Problems involving collision with off-center items often involve knowing that if
W along a line whose closest point
an object of mass m moving at a constant velocity v
is a distance r from the origin O, then the object’s angular momentum about O is
W = mr│v
W
L
W│ perpendicular to the plane containing O and v
(C14.26)
(in the sense indicated by your right hand when your right fingers curl in the direcW points around O). This was shown in chapter C7, but if you haven’t read
tion that v
that chapter, you can take this as a given.
Section C14.6: Asteroid Impacts
In this section, we use conservation of energy and conservation of momentum to analyze some of the consequences of a 10-km asteroid hitting the earth at about 20 km/s,
the kind of impact that killed the dinosaurs. We will see that given just a few bits
of information and some basic physics, we can predict a number of important (and
pretty amazing) consequences.
223
224
Chapter C14
C14.1
The importance of collisions
Definition of an
elastic collision
Inelastic and completely
inelastic collisions
Super-elastic collisions
Collisions
Types of Collisions
A collision (or, more technically, a system that is “momentarily isolated”) represents a useful approximate model for many interesting physical processes.
Remember that a “collision” is a process in which our system’s objects experience a brief internal interaction far stronger than any external interactions,
and we look at the system immediately before and immediately after this
interaction. Because such “momentary isolation” absolves us from having
to worry much about the system’s external interactions (as there is too little
time for them to transfer much momentum, angular momentum, or energy
to the system), we can often treat systems that interact pretty strongly with
their surroundings as isolated. This allows us to apply conservation laws
in an astonishingly broad range of situations. In this chapter, we will have
some fun by considering some of the more spectacular applications of this
model.
We begin by developing some terminology for various types of collisions.
While the total energy of a system involved in a collision might be conserved,
the strong internal collision interactions usually transfer at least some of the
colliding objects’ kinetic energy to internal energy (usually thermal energy).
However, some kinds of collisions transform very little kinetic energy to other
forms. For example, colliding rubber balls deform each other during the collision, converting kinetic energy to microscopic forms of potential energy;
but this deformation energy is (empirically) almost entirely converted back
into kinetic energy as the balls rebound.
We call a collision that conserves the colliding objects’ total kinetic energy
an elastic collision. Collisions involving macroscopic objects are never perfectly elastic, but some are close enough to make the model useful. Examples
include fairly gentle collisions between rubber balls, steel balls, or billiard
balls, as well as collisions between objects that interact strongly gravitationally or electromagnetically as they pass closely without touching (remember
that objects do not have to touch to “collide”). Collisions between microscopic systems such as atoms or molecules can be perfectly elastic whenever
quantum mechanics forbids energy transfers to internal energy (as is often
the case), so in such cases, we can apply the model without approximation.
An inelastic collision converts some kinetic energy to internal energy
(and thus does not conserve kinetic energy). A collision in which the objects
remain stuck together is completely inelastic: such collisions convert as
much kinetic energy to internal energy as conservation of momentum
allows. Completely elastic and completely inelastic collisions represent idealized extremes for a spectrum of possible interactions between macroscopic
objects, but are useful as models because of their simplicity.
We can consider an explosion to be a collision that converts internal
energy to kinetic energy. We call such a collision a super-elastic collision.
But a normal contact interaction between macroscopic objects (that does
not somehow trigger a release of chemical or nuclear energy) will be at best
­elastic and usually inelastic, never super-elastic.
C14.2
One-Dimensional Collisions
Collisions of interest in physics often involve a moving object striking a target object at rest. Such problems are especially simple if the objects are confined to moving in one dimension, which we will take to be the x axis. The
following examples illustrate basic principles as well as some techniques that
will be useful to us in solving more complex problems.
C14.2 One-Dimensional Collisions
225
Problem: Suppose an object with mass m1 moving with speed │v
W0│ in what
we can take to be the +x direction collides with another object with mass m2
at rest. After this head-on collision, the objects stick together. What is their
common x-velocity after this completely inelastic collision? What fraction of
the first object’s original kinetic energy was converted into internal energy in
the colliding objects?
Solution Initial and final diagrams appear below.
Initial:
m1
v0
m2
x
(at rest)
Final:
vf
x
Known: m1, m2, v
W0, and
object 2 is initially at rest.
Unknown: vfx, ∆U
Internal interactions:
• Contact: keep track of
internal energy U
The system of the two objects is momentarily isolated here. The contact interaction may channel energy into internal energy, so we will keep track of that.
The conservation-of-energy master equation tells us that in this case
0
(m
1 + m2) vfx
+m1│v
W0│
0 + 0 =
(C14.1)
0
]
[
] [0] [
0
0
Note that this equation by itself completely determines vfx :
m1 │ │ _____
m
vfx = _______
v
W = 1 │v
W0│ where b ≡ ___
m2
m1 + m2 0
1
1+b
(C14.2)
where in the last step I divided top and bottom by m1. In collision problems,
the answers for final velocities typically depend only on the mass ratio.
Now, the contact interaction has no potential energy. If we define Ui and
Uf to be the initial and final combined internal energy for both objects, our
conservation-of-energy master equation simply says that
2
_ 1 m │v
_1
Wf│2 + Uf ⇒ ΔU = _ 12 m1│v
W0│2 − _ 12 (m1 + m2)│v
Wf│2
1 W0│ + Ui = 2 (m1 + m2)│v
2
2
_ 1 (m + m )│v
Wf│2
(1 + b)│v
v
W0│2
(1 + b)-2│@
1
2 Wf│
_____________
__________
____________
⇒ ________
1 ΔU 2 = 1 −
2 1
=
1 −
= 1 − (1 + b)
2
2
_ m │v
_ m │v
│v
W0│
│v
1 W0│
1 W0│
@
W0│2
2
2
1 = _____
= 1 − _____
1 = _________
1 + b −
b
1+b
1+b
1+b
(C14.3)
Note that this result also only depends on the mass ratio!
How can we check that these results makes sense? First of all, note that b
is unitless, so the units in both equations make sense. Second, we can check
some extreme cases where we think we might be able to intuit the answer. In
the limit that m2 >> m1, b will become very large, so we see that vfx will go to
zero and its kinetic energy will be entirely converted to internal energy. This
is consistent with a tiny object running smack into an essentially immovable massive object. In the case where m1 = m2, then b = 1 and we see that
vfx = _ 12│
v
W0│. This certainly satisfies equation C14.1, and it also makes sense for
the energy ratio, since the final object has twice the mass but half the speed,
and so half the kinetic energy of the original object. So this looks good!
Example C14.1
226
Example C14.2
Chapter C14
Collisions
Problem: Suppose an object with mass m1 moving with a speed │v
W0│ in what
we can take to be the +x direction elastically collides with another object with
mass m2 at rest. After this head-on collision, both objects move along the
x axis. What are their x-velocities just after the collision?
Solution Initial and final diagrams appear below.
Initial:
m1
v0
m2
x
(at rest)
Final:
v1
v2
x
Known: m1, m2, v
W0, and
object 2 is initially at rest.
Unknown: v1x, v2x
Internal interactions:
• Contact: ignore because
collision is elastic
The system of the two objects is momentarily isolated here, and since we are
told that the collision is elastic, the contact interaction has no energy implications. The conservation-of-momentum master equation requires that
m
m
0
1v1x
2v2x
+m
W0│
1│v
+
=
+
0
0
0
0
[
] [ 0 ] [
0
0 ] [ 0 ]
(C14.4)
The contact interaction has no potential energy, and since the collision is
elastic, the objects’ internal energies do not come into play. Therefore, the
conservation-of-energy master equation simply implies that the total system
kinetic energy before the collision is equal to that after the collision:
_12 m│v
W0│2 + 0 = _ 12 m1│v
W1│2 + _ 12 m2│v
W2│2 = _ 12 m1 v 21x + _ 12 m2 v 22x
(C14.5)
as only the x components of the final velocities are nonzero. Note that the x components of equation C14.4 and equation C14.5 provide two equations in the two
unknowns v1x and v1y, so we have enough information to solve the problem.
Let’s again try the trick of dividing through by m1 and defining b ≡ m2/m1.
If we divide the first equation by m1 and divide the second by _ 12 m1, we get the
simpler equations
│v
W0│ = v1x + b v2x
and │v
W0│2 = v 21x + b v 22x
(C14.6)
We can solve this system of equations by solving the first for v1x and substituting the result into the second:
v1x = │v
W0│ − b v2x
(C14.7)
⇒ │v
W0│2 = (│v
W0│ − b v2x)2 + b v 22x = │v
W0│2 − 2b│v
W0│v2x + (b + b2 ) v 22x
⇒ 0 = − 2b│v
W0│v2x + (b + b2 )v 22x
(C14.8)
One of the solutions to the quadratic equation in equation C14.8 is v2x = 0,
as if the first object simply passed through the second object without affecting it. While this solution certainly conserves momentum and kinetic energy
(which is all that the equations care about), it is not realistic. So if we assume
that v2x is not zero, then we can divide both sides by (b + b2) v2x, yielding
v2x = ______
2b 2 │v
W0│ = _____
2 │v
W0│
1+b
b+b
To find v1x, we simply need to substitute this into equation C14.7:
(C14.9a)
C14.3 Two-Dimensional Collisions
227
(
)
2b │v
2b │v
v1x = │v
W0│ − b v2x = │v
W0│ − _____
W0│ = __________
1 + b −
W0│ = _____
1 − b │v
W0│ (C14.9b)
1+b
1+b
1+b
Again we can check equations like this by considering units and extreme
cases. First note that the units are correct in each equation: since b is unitless,
the right sides of both equations C14.9 have the same units as │v
W0│, which are
appropriate units for v1x and v2x . Second, note that if │v
W0│ = 0, we have no collision, so it makes sense that the formulas predict that v1x and v2x are both zero
also. Third, in the limit that the mass of the second object becomes infinite
compared to that of the first, then b ≡ m2/m1 W∞ and we see that the equations reduce to v2x = 0 and v1x = −│v
W0│, meaning that the first object simply
bounces off the essentially immovable second object. This is plausible. So
these results look credible.
Exercise C14X.1
Another excellent way to check the results of such complicated calculations
are to substitute them back into the original equations │v
W0│ = v1x + b v2x and
2
2
2
│v
│
W0 = v 1 x + b v 2 x (see equation C14.6) to see that they are satisfied. Do this.
Note that in drawing the diagram for this problem, I had to choose
which direction I thought the first object might have been going after the collision. However, the conservation equations are agnostic about this: v1x and
v2x could represent either motions in the +x or −x directions, depending on
their signs. We see from the solution that v1x will be positive if m1 > m2 and
negative if m1 < m2, and that v2x is always positive.
Let me underline two valuable things we can learn from these examples.
The first is that in one-dimensional situations, the laws of conservation of
momentum and energy provide two equations we can use to solve for two
unknowns. In the first case, this allowed us to determine the objects’ final
common velocity and the fraction of energy that was converted to internal
energy in the collision (note how conservation of momentum constrained the
distribution of energy). In the second case, the two equations allowed us to
determine the two objects’ final velocities.
Second, note how valuable it was in both situations to define the unitless variable b ≡ m2/m1 (think about how you would go crazy in, say, equation C14.9b with all the m1s and m2s flying around). This trick makes solving
many collision problems much easier.
C14.3
Comments about directions of
final motion in example C14.2
A useful trick
Two-Dimensional Collisions
Now let’s relax the one-dimensional constraint and allow our objects to
W 0
move freely in three dimensions. Consider an object moving with velocity v
that collides with an object at rest. If the velocities v
W1 and v
W2 of the two objects
after the collision are not parallel, then they define a plane in space. MoreW 0 must lie in the same plane: because the system has no component of
over, v
momentum perpendicular to the plane in the final situation by definition, it
can have no momentum perpendicular to the plane initially. Therefore, a collision between a moving object and a stationary target is intrinsically a twodimensional problem, even if the objects are free to move arbitrarily.
Let’s look at examples of two-dimensional inelastic and elastic collisions.
A collision between a moving
object and a stationary one is
intrinsically two-dimensional
Chapter C14
228
Example C14.3
Problem: A croquet player hits a wooden croquet ball so that it strikes an
identical ball at rest. Just before the collision, the moving ball had a velocity
of v
W0. After the collision, both balls follow trajectories that make the same
angle θ with (but on opposite sides of) the originally moving ball’s initial
velocity. What are the speeds │v
W1│ and │v
W2│ of the balls after the collision, and
how much energy is converted to internal energy in the balls?
y
Initial:
v0
Ball,
mass m
Final:
x
Ball, mass
m, at rest
y
Known:
m, v0, θ
Unknown:
v1 , v2 , ∆U
v1
θ
θ
Collisions
x
v2
Solution Initial and final diagrams appear in the margin. Note that I have
arbitrarily defined the +y direction so that v1y is positive after the collision.
The system in this case is the two balls. That system is poorly isolated by
most standards, but because the collision lasts only milliseconds, the system
can qualify as isolated if we look at the situation just before and just after the
collision. The single internal interaction is the contact interaction between
the balls, which we will handle by keeping track of internal energies.
Conservation of momentum in this case requires that
│v
│v
+m
W0│
m W1│cos θ
0
m│v
W2│cos θ
+
=
+
│v
m│v
W1│sin θ
0
0
−m
W2│
sin θ
]
[ 0 ] [ 0 ] [
[
]
0
0
(C14.10)
Here the trick of dividing both sides by the moving ball’s mass simply means
that the masses cancel out entirely. The second line of equation C14.10 implies
immediately that │v
W1│sin θ = │v
W2│sin θ ⇒ │v
W1│ = │v
W2 │. Substituting this into
the first equation (after dividing through by m) implies that
│v
W │
│v
W0│ = 2cos θ │v
W1│ ⇒ │v
W1│ = │v
W2│ = ______
0
2cos θ
(C14.11)
We see that conservation of momentum alone determines the final speeds.
Now let’s consider conservation of energy. Since we have no potential
energy terms, if Ui and Uf are the combined initial and final internal energies of
the balls respectively, the conservation-of-energy master equation implies that
_12 m│v
W0│2 + 0 + Ui = _ 12 m│v
W1│2 + _ 12 m│v
W2│2 + Uf
W0│2 - _12 m│ v
W1│2 − _12 m│ v
W2│2 = _12 m│ v
W0│2 − 2 · _12 m│ v
W1│2
⇒ Uf − Ui ≡ ΔU = _12 m│ v
2│v
W │2
2 │@
v
W0│2
⇒ ________
1 ΔU 2 = 1 − ______
1 2 = 1 − __________
= 1 − ______
1
_ m │v
2
2
│
│v
W0│
1 W0
2cos2 θ
4cos θ│@
v
W0│
2
(C14.12)
The fraction of the original ball’s kinetic energy is unitless and less than 1,
as it must be. Note that as θ goes to zero, the two balls are essentially stuck
together, and the fraction goes to _ 12 , consistent with the result
of example
_
C14.1. The maximum possible value of θ is 45°, as cos 45° = _ 12 , which makes
the subtracted term in equation C14.12 equal to 1. In this limit, the collision
becomes elastic. Indeed, one can prove quite generally that when an initially moving ball collides elastically with an identical ball at rest, the angle
between the balls’ final velocities is always 90° (see problem C14D.1). Angles
greater than 90° would require ∆U to be negative, which is not possible in an
ordinary collision unless it triggers some kind of explosion.
Note that this example illustrates the continuing pattern for inelastic collisions: conservation of momentum places requirements on conservation of
energy that allow us to determine how much energy must be converted to
internal energy.
C14.3 Two-Dimensional Collisions
229
Problem: Suppose that in an atomic physics experiment we fire an atom of
mass m with velocity v
W0 at a target atom of mass 2m. After an elastic collision,
W 2 points at an angle of θ = 45° away from the directhe target atom’s velocity v
W 0. What is │v
tion of v
W2│, and what is the magnitude and direction of the lighter
W 1?
atom’s final velocity v
Solution Initial and final diagrams appear in the margin. Note that even
though the atoms are free to move in three dimensions, we can always
W 2.
choose our xy plane to be the plane containing the final velocities v
W1 and v
The system here is the two atoms. Since atoms in a typical atomic experiment
are likely to move very quickly (many kilometers a second), the entire experiment, if confined to a laboratory, will only take a fraction of a millisecond, so
there is little time indeed for the external force of gravity to affect anything.
We are told that the single internal interaction is elastic, so we only need to
worry about the atoms’ kinetic energies.
Conservation of momentum in this case requires that
│v
2m│v
W2│cos θ
0
mv
+m
W0│
1x
│
W
2m
v
sin θ
0 + 0 = mv
+
2│
1y
]
[ 0 ] [ 0 ] [ 0 ] [
0
(C14.13)
Though in principle we could write v1x = │v
W1│cos ϕ and v1y = −│v
W1│sin ϕ,
long experience has taught me that using components
for
this
unknown
_
velocity is much easier. Also, as cos θ = sin θ =
_ 12 are simple, easy-to-write
unitless numbers here, substituting in their numerical values can save writing in this case. So dividing through by m and substituting in for sin θ and
cos θ yields the very simple equations
__
│v
W0│ = v1x +
2 │v
W2│,
__
0 = v1y +
2 │v
W2│
(C14.14)
These provide two equations for our unknowns, but that is not enough to
determine the three unknowns v1x, v1y, and │v
W2│. The other equation we need
comes from conservation of energy, which for this elastic collision requires
_12 m│v
W0│2 = _ 12 m│v
W1│2 + _ 12 2m│v
W2│2 ⇒ │v
W0│2 = │v
W1│2 + 2│v
W2│2
(C14.15)
We can solve this system of equations by solving equations C14.14 for
v1x and v1y in terms of │v
W0│ and │v
W2│ and substituting these results into equa2
│
│
tion C14.15, noting that v
W2 = v 22x + v 22y. Doing this yields
__
__
v1x = │v
W0│ −
2 │v
W2│ and v1y = −2 │v
W2│
(C14.16)
__
__
│v
│v
⇒@
W0│2= (│vW0│ −
2 │vW2│)2 + 2│vW2│2 + 2│vW2│2 = @
W0│2− 2
2 │vW0││vW2│+ 2│vW2│2 + 4│vW2│2
__
⇒ 0 = −22 │v
W0││v
W2│ + 6│v
W2│2
(C14.17)
One solution to this quadratic equation is │v
W2│ = 0, which again is the null
solution where the atoms don’t actually interact. If we assume that │v
W2│ ≠ 0,
__
_
__
│v
W2│ = ___
26 2 │
v
W0│ = __
32 │
v
W0│ =
_ 29 │v
W0│ ≈ 0.47│v
W0│
(C14.18)
Substituting this back into equations C14.16 yields
v1y
v1x = │v
W0│ − _ 32│
v
W0│ = _ 31│v
W0│ and v1y = − _32 │v
W0│ ⇒ ϕ = tan-1 ___
v = tan-1 2 = 63°
⇒ │v
W1│ =
________
v 2
1x
2
1y
+ v =
_
_ 4 │v
W0│ =
_ 5 │v
W0│
_____
_ 1
9
+9
9
| |
1x
≈ 0.75│v
W0│
_5│ │2
0
9
As a check, note that equation C14.15 is satisfied: │v
W0│2 = v
W
(C14.19)
+ 2 ∙ _29│
v
W0│2.
Example C14.4
y
Initial:
v0
Atom,
mass m
Final:
Known:
m, v0 , θ
Unknown:
v1 , v2 , ϕ
Atom, mass
2m, at rest
y
x
v2
θ = 45°
ϕ
v1
x
230
Chapter C14
Counting equations and
unknowns
In both of these two-dimensional collisions, conservation of momentum
and conservation of energy provide three constraint equations on the outcome. However, the two final ball velocities involve four unknown numbers
(either two sets of two components, or two magnitudes and two directions).
If we know the collision is elastic, we need to specify only one of these
unknowns to determine the others: this amounts to specifying how glancing
the collision is. If the collision is inelastic, specifying two bits of information
about the final velocities allows us to determine the other two bits and how
much energy is converted in the collision.
Of course, this assumes we know everything about the system initially. If
we know everything about the collision outcome, we can use our equations
of constraint to infer things about the system’s initial state.
C14.4
Collisions
The Slingshot Effect
A close encounter with a planet can dramatically increase a spacecraft’s
speed. NASA space probes often use this slingshot effect to boost their speeds
so they can visit more distant planets (this saves money by reducing the fuel
they have to carry). How does this work?
W 0
Let’s consider a specific case where the initial velocities of the probe v
and planet v
WP0 are perpendicular in a reference frame attached to the sun.
Imagine we have aimed the probe so the gravitational pull of the planet
sweeps the probe’s direction around by about 90° as it passes the planet, so
it ends up traveling in the same direction as the planet’s final velocity v
WP, as
shown in figure C14.1. What is the probe’s final speed │v
W│?
Let the probe and planet have masses m and M, respectively. Note that
in the solar system frame, we cannot ignore the gravitational effects of the
sun; but let’s assume the encounter is brief enough that the energy and
momentum that the probe–planet system gets from this external interaction
is small. Let’s also assume that both initially and finally the probe is so far
from the planet that their gravitational interaction’s potential energy is V =
–GMm/r ≈ –GMm/∞ = 0, implying that ∆V = 0. This is the only significant
interaction between the probe and planet (assuming the probe does not enter
the atmosphere), and gravitational interactions rarely cause internal energies
to change, so conservation of energy implies that the system’s total kinetic
energy will be conserved: we can model this encounter as an elastic collision.
Expressed in the reference frame shown in figure C14.1, the law of conservation of momentum implies that
0
Mv
│v
│v
M
WP│
m
W│
Px
│v
W
m
0│ +
0 =
0 + Mv
Py
[ 0 ] [ 0 ] [ 0 ] [ 0 ]
(C14.20)
Since this is an elastic collision, conservation of energy implies that
_12 m│v
W0│2 + _ 12 M│v
W0│2 = _ 12 m│v
W│2 + _ 12 M│v
WP│2
(C14.21)
In this case, dividing all equations by the planet’s mass M and defining b ≡ m/M
is advantageous because we will eventually want to take the limit that the
planet’s mass is huge compared to the probe’s mass, which means that b
(so defined) goes to zero. Doing this to the top two components of equation
C14.20 and equation C14.21 yields the simpler equations
│v
WP0│ = b│v
W│ + vPx
⇒ vPx = │v
WP0│ − b│v
W│
b│v
W0│ = vPy ⇒ vPy = b│v
W0│
(C14.22a)
(C14.22b)
C14.4 The Slingshot Effect
Initial:
231
y
Final:
y
v
vP0
x
vP
x
Planet,
mass M
Figure C14.1
Initial and final situations for an
encounter between a space probe
and a planet that will result in
the probe’s gaining speed by the
slingshot effect.
v0
Probe,
mass m
b│v
W0│2 + │v
WP0│2 = b│v
W│2 + │v
WP│2 = b│v
W│2 + v 2Px + v 2Py
(C14.22c)
We can use the first two equations to eliminate vPx and vPy in the third. After
a bit of work, we find that
0 = (1 + b)│v
W│2 − 2│v
W││v
WP0│ − (1 − b)│v
W0│2
(C14.23)
Exercise C14X.2
Fill in the missing steps between equations C14.22 and C14.23.
Applying the quadratic formula to equation C14.23 yields
___________________________
2│v
WP0│ ±
4│v
WP0│2 + 4 (1 + b) (1 − b)│v
W0│2
│v
W│ = _____________________________________
2(1 + b)
___________________
│v
│v
WP0│ ±
WP0│2 + (1 − b2)│v
W0│2
____________________________
=
1+b
(C14.24)
Now, the planet’s mass M is typically huge compared to the probe’s mass m,
so in the limit that b = m/M goes to zero, this becomes
____________
│v
│v
W│ ≈ │v
WP0│ ±
WP0│2 + │v
W0│2 (if b << 1)
(C14.25)
One of these solutions is negative, which is not appropriate for a vector magnitude (this solution actually corresponds to the probe looping to the left,
instead of the right). But the other solution shows that no matter how small
│v
W0│ might be, the probe’s speed after the encounter exceeds twice the ­planet’s
speed. Since the orbital speed of Venus, for example, is about 41 km/s, this
can give the probe quite a boost.
The probe’s extra kinetic energy must, of course, come from the planet’s
orbital motion, so the planet’s speed after the encounter is a bit smaller than
it was before. Because of the huge difference in masses, though, the effect is
so small as to be immeasurable.
Encounters involving more complicated angles can be much more complicated to calculate, but the basic idea is the same: as long as the probe spends
most of its encounter time close to the planet’s trailing edge, the p
­ lanet’s
gravitational field will pull it along with the planet and boost its speed.
232
Chapter C14
C14.5
The angular momentum of a
moving particle
Collisions
Using All Three Conservation Laws
General collisions between extended objects involve all three conservation
laws. In inelastic collisions, conservation of momentum and angular momentum constrain how the system’s center of mass moves and how the system
rotates after the collision, respectively, while conservation of energy tells you
about how much energy is converted to internal energy.
The next example uses the fact that a nonrotating object of mass m moving at a velocity v
W along a straight line that is a distance r from the origin O at
W
its closest point has an angular momentum L
about O such that
W
│L
│ = mr│v
W│
(C14.26)
W
The direction of L
is perpendicular to the plane that contains the object’s
velocity and O, in the direction indicated by your right thumb if you curl
your right fingers around O in the direction that the object is moving. If you
have read chapter C7, then you will understand why this is true, but if not,
let’s simply accept this as given.
Example C14.5
Problem: A 65-kg astronaut working in the International Space Station asks
a partner for a wrench. The partner, in a playful mood, cries “Catch!” and
tosses the 2-kg wrench at a speed of 3 m/s. The first astronaut, who was
floating at rest, catches the wrench just as it passes 35 cm to the left of that
astronaut’s center of mass. Estimate (a) the astronaut’s center of mass velocity after the catch, (b) the astronaut’s final rotation rate, and (c) the fraction
of the wrench’s kinetic energy converted to nonrotational internal energy.
Solution Initial and final diagrams for this situation appear below.
Initial:
y
Final:
y
v0
Wrench,
mass m
r
O
x
Astronaut, mass M,
moment of inertia I,
at rest
v
M = 65 kg
m = 2.0 kg
v0 = 3.0 m/s
r = 0.35 m
ω= ?v= ?
x
O
(Vertical angular
velocity ω)
(O is the initial position of the astronaut’s center of mass)
The system here is the astronaut and wrench, which is isolated because it
floats in space (any heat that flows to the astronaut’s surroundings will not
be changed in this process, so we will ignore it). The only significant internal
interaction is the contact interaction involved with catching the wrench: we
will handle the interaction by keeping track of internal energies.
Given the coordinate system defined in the diagrams, conservation of
momentum requires that
0
(m
+ M)vx
│v
−m
W0│
(m
+ M)vy
0 +
=
0
[ 0 ] [ 0 ] [
(m + M)vz ]
(C14.27)
where the first column vector is the astronaut’s initial momentum. This is
easy to solve for the astronaut’s final x-velocity v W :
C14.5 Using All Three Conservation Laws
233
(2.0 kg
)(3.0 m/s)
m │v
vx = − _______
W0│ = − _______________
= − 0.090 __
m
s
m+M
2.0
kg + 65
kg
(C14.28)
Since the other rows of equation C14.27 require that vy = vz = 0, we see that
W is 9.0 cm/s in the -x direction.
the astronaut’s final velocity v
Now, the wrench has an initial angular momentum about the origin O that
has a magnitude of mr│v
W0│ according to equation C14.26, and has a direction
(as you can check with your right hand) in the +z direction (toward us in the
diagram). Conservation of angular momentum therefore requires that
0
0
0
=
0 +
0
0
2
[ 0 ] [ +mr│v
]
[
W0│
(I + mr )│ω
W│ ]
(C14.29)
where I + mr 2 is the moment of inertia of the final system of the astronaut
and the wrench (with the latter modeled as a particle that is r from the axis
of rotation). The astronaut + wrench is actually an asymmetric object, so
W
W is not quite correct, but it will be pretty close, and
saying that L
= (I + mr 2) ω
the problem statement only asks for an estimate. (I am also ignoring the fact
that the system’s center of mass is not quite the same as the astronaut’s center
of mass, but this turns out to be an even better approximation: see problem
C14D.2 for a discussion.) The trick is now to estimate the astronaut’s moment
of inertia. Let’s model the astronaut in a relaxed floating posture as having about the same mass distribution as a cylinder with an outer radius of
something like R = r = 0.35 cm (that is, the person fits within a barrel about
2 ft across). If this is so, I ≈ _12 MR2 = _12 (65 kg)(0.35 m)2 = 4 kg·m2, a result that
agrees with more involved estimates I have seen in published papers. With
W
this estimate, we can solve equation C14.29 for │ω
│ to find that
(2.0
kg)(0.35 m)(3.0 m/s)
mr│v
W0│ ________________________
0.5
│ ω
W│ = _______
=
= ___
I + mr2
4
kg·m2 + (2.0
kg
)(0.35 m)2
s
(C14.30)
This is in radians per second. Since there are 2π radians in a revolution,
( 2π rad
)
│ω
W│ = 0.5 ____
rad
______
rev ≈ 0.08 ___
rev
≈ _____
1 rev
s
s
13 s
(C14.31)
Now, the system’s initial rotational energy is zero, but its final rotational
energy is _12 (I + mr 2)│ω
W│2. Let U oth
U oth
i and
f be the system’s initial and final
values for other forms of internal energy (likely U th), respectively. As the contact interaction has no potential energy, conservation of energy requires that
_1
_12 m│v
W0│2 + 0 + 0 + U oth
W│2 + _ 12 (I + mr 2)│ω
W│2 + U oth
i = 2 (M + m)│v
f
oth
oth
⇒ _12 m│v
W0│2 − _ 12 (M + m)│v
W│2 − _ 12 (I + mr 2 )│ω
W│2 = U oth
f − U i = ΔU
m │v
ΔU oth = 1 − _______
I + mr 2 │ω
⇒ _______
M + W│2 − _______
W│2
1
2
2
_ m│v
│
│
│
W
W
m
v
m
0
0
2
(C14.32)
Before we start substituting in numbers, let’s use equations C14.28 and
C14.29 to simplify this expression:
(
ΔU oth
M+m
_______
= 1 − _______
2
_ 1 m│v
W0│
m│v
W0│2
2
)
2
m│v
W0│
I + mr 2
_______
− _______2
m│v
W0│
m+M
(
)
2
mr│v
W0│
_______
I + mr 2
(2.0
kg
)(0.35 m)2
m
mr 2
2
kg ________________________
−
(C14.33)
= 1 − _______
− _______2 = 1 − _____
M + m I + mr
67
kg 4
kg·m2 + (2.0
kg
)(0.35 m)2
This evaluates to 0.91, which seems plausible.
234
Chapter C14
C14.6
The impact that killed
the dinosaurs
The total energy released
Collisions
Asteroid Impacts
This section is mostly for fun, but provides a good opportunity to review
and apply some of the ideas in the unit. I strongly recommend verifying the
claims made in color below: perhaps you will be astonished about what we
can calculate knowing only a few things about energy and momentum.
Many scientists currently believe that the dinosaurs became extinct due
to the consequences of an asteroid hitting the earth 65 million years ago. This
asteroid, which dug a crater about 175 km across in the Caribbean, probably
had a diameter of 10 km, a mass of about m ≈ 10 15 kg, and was likely moving
with a speed of │v
W0│ ≈ 20 km/s relative to the earth when it hit.
It may be hard to comprehend the enormous amount of energy released in
such an impact, but it is not hard to calculate it. In a floating frame where the
earth is initially at rest, the asteroid’s kinetic energy is simply
(
)
1J
_12 m│v
W0│2 ≈ _ 12 (1015 kg
)(20,000 m/s)2 __________
≈ 2 × 10 23 J
2
2
@
1
kg·m /s
@
Immediate effects
The hazards of vaporized rock
(C14.34)
To put this into perspective, the energy released by a typical atomic bomb
in the U.S. arsenal is about 4 × 10 14 J, so this impact will release an energy
equivalent to about 500 million atomic bombs. Since the asteroid’s mass is
less than a billionth of the earth’s mass of 6 × 10 24 kg, the kinetic energy of
the earth–asteroid system after the impact is less than a billionth of the asteroid’s initial kinetic energy. Therefore, virtually all of this energy goes to the
various consequences listed in table C14.1.
An asteroid this large is not even noticeably slowed by the earth’s atmosphere, and at 20 km/s, it will only take about 5 to 10 s to pass through the
atmosphere to the earth. The resulting magnitude-11.5 earthquake is the least
of one’s worries. After the impact, vaporized rock and water are lofted into the
atmosphere, much of it following the rarefied channel in the atmosphere left
by the asteroid’s passage (the asteroid pushes air out of its way as it passes,
and the air doesn’t have time to re-fill the void behind). This causes the channel to become incandescent, with most of the light energy that reaches the
ground coming from altitudes above 25 km. Enough energy is radiated to
cause any point with a direct line of sight of this channel (within a radius of
about 1000 km) to burst into flame. (The tsunamis may help put out some of
these fires along the coast when they arrive some minutes to hours later.)
Of much more serious consequence is the vaporized rock lofted into the
atmosphere. Estimates from computer models are that an amount of rock
equal to about twice the mass of the asteroid is converted into vapor, and
roughly 100 times the mass of the asteroid is not vaporized but is simply
lofted as pulverized rock into the upper atmosphere. If we estimate that the
latent “heat” of rock is about 8000 kJ/kg (see the iron and aluminum entries
in table C13.1), then the energy that goes to vaporizing rock is very roughly
U la ≈ (2 × 1015 kg
)(8 × 10 6 J/
kg) = 1.6 × 10 22 J
(C14.35)
which is about 10% of the impact energy. If we estimate (as suggested by some
models) that the average energy of the pulverized rock is such that it would
be lofted to a height of 30 km or so if launched vertically, then the energy that
goes to lifting pulverized rock is roughly 15% of the impact energy.
The vaporized rock is a huge problem, because about one-half is moving
fast enough to leave the atmosphere with orbital speeds of 8 km/s or greater.
In addition to its latent energy, this rock carries a total kinetic energy about
equal to 15% of the impact energy:
K = _ 12 (1015 kg)(8000 m/s)2 = 3 × 1022 J
(C14.36)
C14.6 Asteroid Impacts
Table C14.1
235
Consequences of a major asteroid impact in the ocean
Agent
Consequence
Duration
Scale
Shock wave
Pressure, winds
Minutes
r < 1000 km
Splash
Incredibly large tsunamis
Hours
r < 3000 km
Fires
Burning
Cooling from soot
Toxins and acid rain
Months
Months
Months
Global
Global
Global
Lofted dust
Cooling
No photosynthesis
Too dark to see
Heavy metal pollution
Years
Months
Months
Years
Global
Global
Global
Global
Nitrogen oxides
Ozone loss
Cooling due to smog
Years
Years
Global
Global
Sulfur dioxide
Cooling due to smog
Acid rain
Years
Years
Global
Global
Water and CO2
Warming
Decades
Global
(Adapted from Toon et al., “Environmental Perturbations of Asteroid Impacts,” in Hazards
due to Comets and Asteroids, ed. T. Gehrels, Tucson: University of Arizona Press, 1994. Most of
the information in this section comes from that book.
(The gravitational potential energy involved is tiny in comparison.) So this
rock can nearly orbit the earth before it drops back into the atmosphere within
some tens of minutes and deposits its energy into the middle atmosphere. If
we assume that this energy is released evenly over a period of 3000 s (the better part of an hour) and that the ground gets about one-quarter of this energy
(the rest being radiated into space or remaining in the atmosphere), the average power per square meter that the earth receives over its entire surface is
very roughly 5000 W/m2 during this time, five times the intensity of direct
sunlight. This can ignite fires essentially anywhere on the planet. Indeed, the
evidence of soot left in the rocks formed at the time of the dinosaur impact
suggests that a significant fraction of the world’s biomass burned.
This is just the first hour of consequences! It turns out that of the pulverized rock lofted, about 10% of the asteroid’s mass is lofted in the form of submicron dust particles, which can remain in the upper atmosphere for years.
This is enough dust to reduce the intensity of sunlight around the globe to
about 10-10 of its normal intensity. This is so dark that humans cannot see anything, and needless to say, photosynthesis is not going to happen. Also, the
earth’s surface soon becomes quite cold without sunlight, well below freezing in the middles of continents according to the models. This dust shroud is
mostly gone after 6 months, but global cooling persists for years, because it
takes a long time for the oceans to recover their normal temperature.
For yet more consequences, see problem C14M.12. It is easy to see how
all this might lead to global extinctions, though! (Fortunately, impacts this
large are extremely rare, about one per 100 million years. Your chance of
being killed by lightning per year is 1/5 million, so worry about that first.)
Exercise C14X.3
Verify the three underlined results in the preceding discussion.
The effect of lofted dust
236
Chapter C14
Collisions
TWO-MINUTE PROBLEMS
C14T.1 Momentum is not conserved in an inelastic collision. T or F? Energy is not conserved in an inelastic
­collision. T or F?
C14T.2 You can be certain that a collision between two
objects is elastic if
A. The system’s total momentum is conserved.
B. The system’s total energy is conserved.
C. The system’s total kinetic energy is conserved.
D. If the objects are bouncy or springy.
E. If the objects stick together after the collision.
C14T.3 Suppose you have a small cart at rest. You have two
different objects that you might throw at the cart to get it
moving: a 57-g tennis ball and a 57-g lump of sticky clay.
Other things being equal, which should you throw at the
cart to maximize the cart’s final speed?
A. The tennis ball
B. The clay
C. It doesn’t matter: both will have the same effect.
A.
B.
C.
D.
E.
Zero
One
Two
Three
Four
C14T.8 An object of mass m1 moving in the +x direction collides with another object at rest with mass m2. After the collision, the object with mass m2 is observed moving in the
+y direction. Such a collision cannot be elastic, no matter
what m1 and m2 might be. T or F?
C14T.9 An object of mass m traveling at speed │v
W0│ in the
+x direction hits an identical object at rest. Characterize
each of the collision outcomes shown below as being (A)
absurd or (C) credible. (The collisions are not necessarily
elastic, but they are not super-elastic.)
(a)
x
C14T.4 An object of mass m moving in a +x direction collides head-on with an object at rest with mass 3m. After
this elastic collision, the first object
A. Moves in the +x direction.
B. Moves in the −x direction.
C. Is at rest.
D. Could move in either the +x or –x direction depending
on what its initial speed was.
(b)
x
(c)
x
C14T.5 An object moving with speed │v
W0│ collides head-on
with an object at rest that is very much more massive. If the
collision is elastic, how does the lighter object’s speed │v
W│
after collision compare to │v
W0│?
A. │v
W│ ≈ −│v
W0│
B. │v
W│ ≈ │v
W0│
C. │v
W│ ≈ − _12│
v
W0│
D. │v
W│ ≈ _ 12│
v
W0│
E. │v
W│ << −│v
W0│
F. │v
W│ << │v
W0│
(d)
x
(e)
x
C14T.6 If two moving objects collide, we can always orient our reference frame so that the collision takes place
entirely in the xy plane. T or F?
C14T.7 Consider a collision where an object with a known
mass and known speed collides with another object at rest.
The objects are free to move in three dimensions.
(a) How many quantities suffice to completely determine
the system’s final state (that is, the outgoing objects’
velocities and their combined change in internal
energy)?
(b) If the collision is elastic, how many equations of constraint do we have on those quantities?
(c) If the collision is completely inelastic, how many quantities suffice to determine the system’s final state?
(At rest)
(f)
(g)
θ
θ
x
θ
θ
x
C14T.10 An astronaut floating in the International Space
Station catches a Frisbee thrown directly toward his or
her center of mass. Does the astronaut + Frisbee’s change
in thermal energy ∆U th depend on whether the Frisbee
is spinning or not, and if so, which case makes it larger?
A. ∆U th is greater if the Frisbee is spinning.
B. ∆U th is the same in both cases.
C. ∆U th is greater if the Frisbee is not spinning.
D. One needs more information to tell.
Homework Problems
237
HOMEWORK PROBLEMS
Basic Skills
Modeling
C14B.1 A rubber ball with a mass m moving with a speed of
1.2 m/s in the +x direction collides with a ball with mass
2m at rest. If this one-dimensional collision is elastic, what
are the speeds and directions of both balls afterward?
C14M.1 A 1.0-kg cart with frictionless wheels moving along
the +x axis at a speed of 1.5 m/s collides elastically with
another cart of mass 0.75 kg moving in the –x direction at
2.0 m/s. If the carts continue to move along the x axis after
the collision, what are their x-velocities afterward?
C14B.2 An air-track glider with mass 2m moving with a
speed of 0.60 m/s hits a motionless glider with mass m. If
the collision is elastic, what are the speeds and directions
of both gliders afterward?
C14B.3 A 6-kg bowling ball moving at 2.0 m/s in the +x
direction elastically collides head-on with a bowling pin
of mass 1.5 kg. We observe the pin to be moving in the +x
direction after the collision.
(a) What is the pin’s speed after the collision?
(b) What is the magnitude and direction of the ball’s speed
after the collision?
C14B.4 A 16-g bullet traveling at 400 m/s strikes and
embeds itself in a 1.584-kg block of wood on rollers.
(a) What is the block’s final speed?
(b) What is the bullet’s initial kinetic energy?
(c) What is the bullet + block’s final kinetic energy?
(d) Explain the difference. Where has the energy gone?
C14B.5 An astronaut in deep space is moving at 2 m/s. A
second astronaut moving with a speed of 3 m/s in the
same direction catches up with the first and they collide.
After the collision, they hold on to each other. Assume that
the astronauts have the same mass of 80 kg.
(a) What is the astronauts’ speed after the collision?
(b) What were their kinetic energies before the collision?
(c) What is their kinetic energy after the collision?
(d) Explain the difference. Where has the energy gone?
C14B.6 One possible method of propelling a spacecraft
within the solar system is to use photons from the sun to
push on a sail attached to the spacecraft. Would such a sail
experience more force if it were shiny (reflecting the photons) or black (so that it absorbs them)? Explain.
C14B.7 Answer the question posed in problem C14T.8 and
explain your reasoning.
C14B.8 For each of the cases depicted in problem C14T.9,
answer the question posed in the problem and explain
your reasoning.
C14B.9 Answer the question posed in problem C14T.10 and
explain your reasoning.
C14B.10 A 500-kg disk-shaped nonrotating satellite gets hit
by a 5-g piece of space debris moving at 1 km/s. If the
debris buries itself near the satellite’s rim, how rapidly will
the satellite rotate after the hit?
C14M.2 A 7.2-kg bowling ball moving at 3.5 m/s collides
with a 1.2-kg bowling pin at rest. After the collision, the
pin moves at 3.0 m/s at an angle of 60° with respect to the
bowling ball’s original direction of motion.
(a) What is the magnitude and direction of the ball’s final
velocity vector?
(b) Is this collision approximately elastic?
C14M.3 A 7.2-kg bowling ball moving at 3.5 m/s collides
elastically with a 1.2-kg bowling pin at rest. After the collision, the pin moves an angle of 30° with respect to the
bowling ball’s original direction of motion. What are the
final speeds of both the ball and the pin after the collision?
C14M.4 A 230-g hockey puck originally sliding on ice in
the +x direction at 0.50 m/s collides with another puck of
equal mass at rest. After the collision, the first puck moves
at 0.20 m/s along a line that makes an angle of 37° with the
x axis (note that cos 37° ≈ _ 45 and sin 37° ≈ _35 ).
(a) What is the magnitude and direction of the other
puck’s velocity vector?
(b) Is this collision approximately elastic?
C14M.5 In a certain physics experiment, a helium atom traveling at a speed of 240 m/s hits an oxygen atom at rest.
If the helium atom rebounds elastically from the oxygen
atom at an angle of 90° with respect to its original direction
of motion, what are the final velocities of both atoms (magnitude and direction)? (Hint: The mass of the oxygen atom
≈ 4 times that of the helium atom.)
C14M.6 An atom with mass m moving in the +x direction
with speed │v
W0│ strikes an atom of mass 3m at rest. After
the atoms interact elastically, the lighter atom moves in
the +y direction with speed │v
W1│ and the_ other atom moves
off at an angle θ with a speed │v
W2│ =
_ 16 │v
W0│.
(a) What is │v
W1│ as a multiple of │v
W0│?
(b) What is the angle θ?
C14M.7 Imagine that in a physical chemistry experiment, we
shoot oxygen atoms with a certain speed │v
W0│ at a collection of neon atoms at rest. Note that neon atoms have very
nearly 5/4 the mass of oxygen atoms. Suppose that during
a specific collision between one oxygen atom and one neon
atom, we observe the rebounding oxygen atom to come
away from the collision traveling at a speed of │v
W1│ = _ 13│
v
W0│
at an angle of 90° with respect to its original direction of
motion. Was this particular oxygen atom’s interaction with
the neon atom completely elastic or not?
238
Chapter C14
Collisions
C14M.8 An astronaut with mass m is initially at rest in deep
space. A second astronaut with the same mass is moving
with velocity v
W1 along a trajectory that will miss the first by
a distance L. This astronaut throws a rope to the first when
they are closest. They both then grip the rope, so they are
always a distance L apart subsequently. Let’s define the origin O to be halfway between the astronauts at the instant
they grip the rope.
Wf of the
(a) What is the final center-of-mass velocity v
bound system consisting of the two astronauts?
W
(b) What is the system’s angular velocity ω
?
(b) How much energy (if any) has been converted to/from
thermal and/or chemical energy in the astronauts?
C14M.9 Suppose two disk-like satellites very slowly
approach each other and then dock so that their central
axes are aligned. One has a mass m and radius r, and
the other has mass M = 4m and radius R = 2r. Suppose
W
the lighter one was rotating with angular velocity ω
around its central axis before docking, but the other
was not rotating. What fraction of the smaller satellite’s
­rotational energy was converted to thermal energy in the
docking process?
C14M.10 An astronaut with mass M floating at rest in the
International Space Station catches a spinning Frisbee
that someone has thrown directly toward his or her center
of mass. The Frisbee has a mass m, a radius r, a moment
of inertia of _23 mr 2, and had a speed │v
W0│ and was rotating
around a vertical axis with angular speed │ω
W0│ when it
was caught. Model the astronaut as having the mass distribution of a cylinder with some radius R. Assume the astronaut cradles the caught Frisbee very near his or her center
of mass. (Hint: You may find it convenient to define
b ≡ m/M, ρ ≡ r/R, and u ≡ r│ω
W0│/│v
W0│.)
(a) What is the astronaut’s final speed │v
Wf│?
(b) What is the astronaut’s final rotational speed │ω
W│?
(c) What fraction of the Frisbee’s initial total energy (rotational + kinetic) must have been converted to thermal
energy when the astronaut caught it?
(d) Suppose we have M = 54 kg, R = 26 cm, m = 180 g,
r = 13 cm, │ω
W0│ = 5.0 rev/s, and │v
W0│ = 4.0 m/s. Calculate the numerical results for parts (a) through (c).
C14M.11 Two astronauts of equal mass M are holding on to
the ends of a lightweight rod of length L. They are rotating
around their common center of mass at an angular speed
of │ω
W0│. They pull themselves inward along the rod until
they are only a distance _ 12 << L apart.
(a) How much has their rotational energy increased when
they are finished?
(b) Where do you think this energy comes from?
C14M.12 One asteroid-impact consequence not discussed
in section C14.6 was the water that would be vaporized
and/or lofted into the atmosphere as a result of the impact.
(a) Computer simulations suggest that for large-energy
impacts similar to the one described in section C14.6,
water having about 3 times the mass of the asteroid
is essentially instantly vaporized in an ocean impact.
What fraction of the asteroid’s energy does the energy
required to do this represent?
(b) An amount of water equal to about 30 times the mass
of the asteroid will simply be splashed into the stratosphere above about 15 km. Roughly what fraction of
the impact energy does this represent?
(c) The stratosphere is currently very dry, holding only
something like 3 × 1012 kg of water total, and it is estimated that the stratosphere simply cannot hold more
than about 250 times this mass (the water will simply
precipitate out). Does the amount of water vaporized and splashed into the stratosphere by the impact
exceed this limit? Explain.
(d) If the ocean where the asteroid hits is shallow, the c­ rater
rim might be high enough to exclude the ocean. If it is not,
or if cracks form quickly that let water in, then the ocean
will boil over the hot spot at the center of the crater for
months. If this boiled water ends up carrying away 10%
of the impact’s energy, how much water is boiled? How
does this amount compare to the total amount of water
currently in all parts of the atmosphere (about 10 16 kg)?
Closing comments: The effect of adding all this water to
the atmosphere is hard to predict. Adding huge amounts
of water to the lower atmosphere will plausibly cause
unbelievable precipitation, leading to floods, enormous
storms, and so on. Water is also a potent greenhouse gas,
so the water injected into the stratosphere may cause significant greenhouse warming once the dust dissipates. On
the other hand, the formation of ice crystals in the upper
atmosphere might reflect sunlight to space, leading to
cooling. Either way, significant effects on the earth’s climate are projected to last for decades after the impact.
Derivation
C14D.1 Prove that when a moving object of mass m collides
with an identical stationary object, the angle between their
final velocities is always 90°, no matter how glancing the
collision might be. (Hint: When the two object masses are
equal, argue that the initial velocity vector and the two
final velocity vectors must form a closed triangle. Then,
apply the law of cosines.)
C14D.2 Consider the total moment of inertia Itot of a twoobject system consisting of a large extended object with
mass M and moment of inertia I and a small, particle-like
object of mass m << M attached to that object a distance r
from the larger object’s center of mass. In example C14.5,
we estimated the total moment of inertia of such a system
to be Itot = I + mr2, which implicitly assumes that the large
object’s center of mass is the same as the system’s center of
mass. However, this is not quite right.
(a) Argue that the large and small objects’ centers of mass
are really r1 = mr/(m + M) and r2 = Mr/(m + m) from
the system’s center of mass, respectively.
(b) Using equation C7.16, argue that if the whole system
W
rigidly rotates with angular velocity ω
around the system’s center of mass, then the angular momentum of
the system around that center of mass is
Answers to Exercises
239
W = (I + Mr 21 + mr 22 ) ω
W
Itot ω
(C14.37)
(c) Substitute in the values of r1 and r2 from part (a) and
simplify to show that
2
Itot = I + _________
mr
1 + m/M
(C14.38)
accident. The driver of car B does not dispute that car A
was traveling at 40 mi/h but claims that car B was stalled
in the center of the intersection at the time of the accident,
so car A should have had plenty of time to stop. You are
the judge. Which story is more consistent with the physical
facts? (Hints: Can
this collision be super-elastic? Note also
__
3
that sin 60° = __
,
and
cos 60° = _ 12. Plug these into the equa2
tions as fractions, not their decimal equivalents!)
2
As m << M, the mr term is already likely to be much
smaller than I = αMR2 if R (the large object’s radius)
and r are comparable, so making a small adjustment to
that already small term doesn’t make much real difference. So Itot = I + mr2 is a pretty good approximation.
C14D.3 Suppose you place a small ball of mass m on top of
a large elastic ball of mass M and drop both from rest at a
height h. Assuming that a small gap exists between the two
balls when the bottom ball bounces off the floor, show that
the small ball will bounce to a height of 9h in the limit that
b ≡ m/M goes to zero.
Rich Context
C14R.1 On an icy road one day, a car with mass m (car A)
traveling due east hits another car of mass 2m (car B) in
the center of an intersection. After the accident, marks in
the ice show that car A skidded at an angle of 60° south of
east, while car B skidded at an angle of 60° north of east.
The driver of car A claims in court to have been traveling the speed limit of 40 mi/h, but car B ran the stoplight
and was moving northward at 20 mi/h at the time of the
C14R.2 You are working on digital effects for the next Star
Wars episode. You are responsible for a scene where a
small, fast-moving fighter crashes and embeds itself in
a skinny Empire battle cruiser (which is supposed to be
about 1500 m long) initially at rest. You want to make sure
that the physics is right so that your rendering looks realistic. Model the fighter as a point particle and the cruiser as
a thin rod. You estimate the cruiser’s mass to be 30 times
that of the fighter, and that the fighter is traveling at about
one cruiser-length per second when it hits. Assume also
that the fighter hits close to one end of the cruiser and is
traveling perpendicular to the cruiser when it hits.
(a) What is the speed of the cruiser’s center of mass after
the collision (in cruiser lengths per second)?
(b) What is the cruiser’s rotation rate after the collision (in
revolutions per second)?
(c) Assume that both the fighter and cruiser are made of
aluminum, and that each gets one-half of the thermal
energy created by the collision. What will be the fighter’s final temperature? Will it melt or vaporize? (Aluminum melts at 933 K and vaporizes at 2600 K.)
ANSWERS TO EXERCISES
C14X.1 Substituting the results of equations C14.9 back into
equations C14.6 yields
│v
W0│ ≟ v1x + b v2x = _____
1 − b │v
W0│ + _____
2b │v
W0│
1+b
1+b
2b│v
!
= __________
1 − b +
W0│ = _____
1 + b │v
W0│ __
W0│
= │v
1+b
1+b
(C14.39)
(1 + b ) (1 + b )
2
2
│v
W0│2 ≟ v 21x + b v 22x = _____
1 − b │v
W0│ + b _____
2 │v
W0│
2
(1 − 2b + b ) + 4b
1 + 2b + b │v
_______________
│v
=
W0│2 = __________
W0│2 __
=! │v
W0│2 (C14.40)
(1 + b)2
1 + 2b + b2
2
So these equations are indeed satisfied.
)
1015
kg
= ___________________
= __
1 × 10-9
24
6 × 10 kg
+ 1015 kg
6
(C14.42)
(b) The change in the gravitational potential energy associated with lifting 100 × 1015 kg of rock 30 km vertically is
(
b│v
W0│2 + │v
WP0│2 = b│v
W│2 + v 2Px + v 2Py
= b│v
W│2 + b2│v
W0│2 + (│v
WP0│ − b│v
W│)2
= b│v
W│2 + b2│v
W0│2 + │v
WP0│2 − 2b│v
WP0││v
W│ + b2│v
W│2
⇒ 0 = (b + b2)│v
W│2 + (b2 − b)│v
W0│2 − 2b│v
WP0││v
W│
as claimed.
(
2
_12 (M + m)│v
Wf│2 M + m m│v
W│
____________
= _______
_______
0 = _______
m
1
2
2
_ m│v
m+M
M
+
m
│
│
│
W
W
m
v
0
0
2
)
ΔV = m│g
W│(zf − zi) = (1017 kg) 10 __
m2 (30,000 m − 0)
s
kg·m2
22 ______
22
= 3 × 10
= 3 × 10 J
(C14.43)
s2
This is indeed about 15% of the impact energy.
(c) The earth’s surface area is 4πR2, where R = 6380 km
is the earth’s radius. If one-quarter of 3 × 10 22 J is evenly
distributed over this area during a period of 3000 s, the
average power received per square meter is
C14X.2 According to equations C14.22, we have
⇒ 0 = (1 + b)│v
W│2 − 2│v
WP0││v
W│ − (1 − b)│v
W0│2
C14X.3 (a) If the masses of the asteroid and earth are m and
M, respectively, and the asteroid’s initial velocity is v W 0, then
conservation of momentum requires that the system’s final
W f is such that m v
W0 = (m + M) v
Wf. Therefore, the sysvelocity v
tem’s final kinetic energy over its initial kinetic energy is
(C14.41)
_ 1 (3 × 10 22 J)
4
______________________
_____
1 W = 4900 ___
W2
(3000 s) 4π (6,380,000 m)2 1 J/s
m
( )
(C14.44)
CA
The Standard Model
CA.1
Introduction
In this appendix, I want to lay out the basic features of the Standard Model
of elementary particle physics. Knowing these features is not essential for
understanding the material in this unit, but the unit does refer to this model
in a number of places, so I thought it would be worth describing the model in
a bit more depth for those who are interested. At this level, I can only provide
a superficial discussion, but it still may be worthwhile.
CA.2
Matter Particles
Elementary particles are true particles having no (known) deeper structure
(they are point-like, as far as we know). Chapter C2 mentioned that in the
Standard Model, all matter particles fall into two categories, called quarks
and leptons. There are six distinguishable leptons and six quarks. These six
particles are arranged in three corresponding families of two particles each
(though the model does not offer an explanation for this structure). Table
CA.1 lists these particle families and their characteristics.
Each of these particles also has a corresponding antiparticle, which has
the opposite electric charge but in all other respects is the same. The symbols
for the antiparticles corresponding to the e-, µ-, and τ- are written e+, µ+,
and τ+, respectively. For all other particles, we put_a bar over the symbol
(for example, the symbol for an antidown quark is d
). (Antineutrinos have
opposite values of a quantity called “chirality” instead of charge,
so an anti__
neutrino can be distinguished from a neutrino: for example, ν
e≠ νe.)
All known types of what we consider “matter” particles (including
exotic types of particles seen only in particle accelerator experiments and in
energetic astrophysical objects) are constructed of these 12 particles and their
antiparticles. In particular, a proton is a quark triplet consisting of two up
quarks and a down quark. A neutron is a quark triplet consisting of two down
quarks and an up quark. Atoms are in turn constructed of protons, neutrons,
and electrons (the lowest-mass lepton). As we will see shortly, it is no coincidence that all normal matter is constructed of the lowest-mass quark triplets
and the lowest-mass lepton.
CA.3
Fundamental Interactions
The Standard Model also asserts that quarks and leptons can participate
in four distinguishable interactions. The strongest is the strong (nuclear)
­interaction, which acts only between quarks. It binds quarks together into
protons and neutrons, and binds protons and neutrons together into atomic
240
Table CA.1
Table of lepton and quark properties
Masses and charges here are expressed in terms of the proton mass and charge, respectively.
LeptonsQuarks
Name
Symbol
Mass
Charge
Name
Symbol
Mass*
Charge
Electron
e-
1/1836
-1
Down
d
0.33
- _13
Electron-neutrino
νe
≈0
Up
u
0.33
+ _23
Muon
µ-
0.1126
Strange
s
0.57
- _13
Muon-neutrino
νµ
≈0
Charmed
c
1.6
+ _23
Tau
τ-
1.894
Bottom
b
5.0
- _13
Tau-neutrino
ντ
≈ 0 (?)
Top
t
184
+ _23
0
-1
0
-1
0
*Because quarks cannot exist as isolated particles, their masses cannot easily be determined (we will see why in unit Q). The masses listed
here follow one scheme for defining quark masses, but should be used only for comparison and should not be taken too literally.
nuclei. The next strongest interaction is the electromagnetic interaction,
which acts only between electrically charged particles. The weak (nuclear)
interaction acts between all quarks and leptons, and has the unusual property of being able to change a particle’s identity, as we will see. Finally, the
gravitational interaction acts between any particle (including the mediator
particles we will discuss shortly) but is by far the weakest of the four.
Each interaction has one or more associated mediator particles that represent the interaction in quantum-mechanical calculations. These calculations imagine that a pair of matter particles interact by exchanging mediator
particles in a way that usually makes the mediators undetectable even in
principle. Under the right circumstances, though, certain particle interactions can emit these mediators as separate and detectable particles. The best
known mediator is the photon, the mediator of the electromagnetic interaction. Light consists of independent photons. The properties of the four interactions and their mediator particles are shown in table CA.2.
Table CA.2
Table of fundamental interactions
Mediator masses and charges here are expressed in terms of the proton mass and charge, respectively (we will see
what zero mass means in unit R.) The “strength” of a given interaction is roughly the ratio of the magnitude of the force
between two quarks 10-15 m apart to the force exerted by the strong interaction.
Name
Acts between
Strength Range
Strong (nuclear)
Quarks and/or gluons
1
Electromagnetic
Charged particles
≈ 10-15 m
-2
≈ 10
∞
-13
-18
Weak (nuclear)
Quarks and/or leptons
≈ 10
≈ 10 m
Gravitational
All particles
≈ 10
-38
∞
Mediator(s)
Mass
Charge
Gluons (8 types)
0
0
Photon
0
0
Vector bosons:
(W +, Z 0, W -)
85.7, 97.2, 85.7 -1, 0, +1
Graviton (? Not seen) 0
0
241
242
Appendix CA
The Standard Model
Mediator particles qualify as “elementary particles” also, but they do
have characteristics that distinguish them from the quarks and leptons,
which I will distinguish by calling the latter “matter particles.” One distinguishing feature is that though each mediator particle has an antiparticle,
that antiparticle is just another standard mediator particle. For example, the
photon is its own antiparticle (!), the antiparticle of each of the eight gluons is
another one of the eight gluons, and the antiparticles of the W -, Z 0 and W +
particle are just the W +, Z 0, and W - particles, respectively. (This is unlike
matter particles: an antiup quark is different from any other quark.)
Note also that the strong and weak nuclear interactions have an effective
range smaller than the typical size of an atomic nucleus! This means that
while these interactions help determine nuclear structure (as we will see in
unit Q), only the electromagnetic and gravitational interactions are able to
act between particles separated by more than the width of an atomic nucleus.
CA.4
The Importance of Color-Neutrality
The electromagnetic interaction operates between charged particles. There are
two types of charge, which we call “positive” and “negative,” and which we
represent by positive and negative numbers. Opposite charges attract, and
like charges repel. Stable structures (such as atoms) have zero net charge (that
is, they contain an equal amount of positive and negative charge) because any
system with a nonzero charge will strongly attract any oppositely charged
particles in the vicinity, absorbing them until the system is neutral.
With this in mind, let’s consider the strong interaction, which operates
only between quarks. “Color” is the quark property that is to the strong interaction what “charge” is for the electromagnetic interaction. “Color” comes in
three types (not two). We metaphorically call these types “red,” “green,” and
“blue,” after the three primary colors of light. A “red” quark will repel another
“red” quark, but will attract both a “green” and a “blue” quark.
The primary point of this metaphor (so to speak) is that, just as mixing
all three primary colors of light creates white light, combining all three kinds
of “colored” quarks creates a structure that is color-neutral (that is, does not
respond to the strong interaction). Therefore, only quark triplets (having
one “red” quark, one “green” quark, and one “blue” quark) can be stable in
the long term, because this is the only configuration of quarks that is color-­
neutral. This is why protons and neutrons are quark triplets.
If we allow the possibility of including antiquarks, then we can also construct a color-neutral structure from one quark and an antiquark (because, for
example, “red” + “antired” = “white” as well). We call a quark–­antiquark
pair a meson and a quark triplet (or antiquark triplet) a baryon.
The strong interaction’s mediators (the gluons) themselves have color
(unlike the electromagnetic interaction, where the photon does not have
charge). Thus, when you pull two quarks apart, their strong interaction feeds
back on itself and maintains its strength instead of getting weaker (as the electromagnetic interaction does when you pull charged particles apart). Indeed,
once you separate two quarks by a certain distance, the energy involved in
the growing strong interaction field between them becomes so large it can create a new quark–antiquark pair out of that energy (we’ll talk about creating
particles out of energy in unit R). This means that a quark structure that is not
color-neutral simply can’t exist: as you try to pull a quark out, the energy you
put into stretching the bond eventually creates new quarks and antiquarks
that create new, unstretched color-neutral structures, similar to how stretching a rubber band eventually creates two unstretched rubber bands.
CA.5 Stability and the Weak Interaction
This is why nobody has ever seen a bare quark, and why no one ever
will. We only know of the existence of quarks by observing the regularities in
the quark triplets and quark–antiquark pairs that can exist.
I also should note that even though protons and neutrons are color-­
neutral structures, they still can bind to each other via the strong interaction.
When such triplets get sufficiently close, the distances between a given quark
in one and the three quarks in the other may be different enough that the
forces they exert on each other do not completely cancel. This is similar to the
way electrically neutral atoms can still bond via the electromagnetic interaction to form molecules. This also helps explain why the strong interaction’s
range is so limited: quark triplet structures are about 10-15 meters across, so
once they are a few times this distance apart, they appear to each other as
essentially being color-neutral particles and so no longer interact.
Exercise CAX.1
(a) A proton has a positive charge and is constructed of two up-quarks and a
down-quark (uud). A neutron is electrically neutral: it is constructed of two
down-quarks and an up-quark (udd). A delta particle ∆++ is an exotic baryon
that has a comparable mass to the proton and neutron but has twice the proton’s charge. What must its quark composition be? (b) The pion family π +,
π 0, and π - represents the lowest-mass set of mesons. What must the quark
composition of the π + meson be?
CA.5
Stability and the Weak Interaction
The last section explained why we don’t see bare quarks and why the protons and neutrons that make up ordinary matter are quark triplets. But why
don’t we see quark triplets other than the proton and neutron in nature? Why
aren’t muons as commonplace as electrons?
The Standard Model’s answers to these questions hinge on the peculiar
nature of the weak interaction. Unlike the other three interactions, a weak
interaction can change the participating particles into different particles. For
example, a weak interaction can change a charged lepton into its neutrino
counterpart (muon to muon-neutrino) or vice versa, and can change a quark
into any other kind of quark. The weak interaction enables any kind of transmutation that satisfies the following rules:
1.
2.
3.
4.
Energy must be conserved.
Charge must be conserved.
Only quarks and leptons (not mediators) can participate.
The net number of leptons involved in each family (electron, muon, tau)
must be separately conserved (a lepton in a given family counts as +1, an
antilepton in the same family counts as -1).
5. The net number of quarks must be conserved (any quark counts as +1,
any antiquark counts as -1).
6. The number of elementary particles going into a weak interaction, plus
the number coming out, must equal four (and at least one must go in).
To answer the questions raised at the section’s beginning, we must focus
on decay processes, where a single charged lepton or a quark in a quark
structure undergoes a weak interaction that produces daughter products. In
such a case, the energy conservation requirement means (for reasons that
243
244
1.
2.
3.
4.
Initial mass > total final mass.
Charge is conserved.
Quarks and leptons only!
Lepton number in each family
is separately conserved.
5. Quark number is conserved.
6. The number of elementary
particles going in + out = 4.
Figure CA.1
The rules for decay processes
­mediated by the weak interaction.
Appendix CA
The Standard Model
will become clearer in unit Q) that the mass of the initial particle or structure
must be larger than the sum of the masses going out. For easy reference, I
have restated the six rules for weak-interaction decays in__figure CA.1.
For example, we see that the process µ- We- + νe+ νµ is a possible
weak interaction decay process. The mass of the muon is larger than the
masses of the electron and neutrinos combined, charge is conserved, the process only involves leptons, the muon family lepton number is conserved (1 =
0 + 0 + 1) and the electron family lepton number is conserved (0 = 1 - 1 + 0),
the quark number is conserved (0 = 0), and one particle decays to three
(1 + 3 = 4). This means that because of the weak interaction, the muon is unstable: It can decay via the process above (and does so with an average lifetime
of a couple of microseconds). The same is true of the tau lepton. The electron,
however, is stable, because no lighter particle exists that can carry away the
electron’s charge. So the electron is the only stable charged lepton.
Something similar is true of quark structures. Consider, for example, a
neutral baryon known as the Λ0, whose quark structure is uds. It can decay
via the following weak process
Λ0 = (ud) s W(ud) u + d u= p+ + π __
(CA.1)
where p+ is the symbol for a proton and the parentheses indicate that the u
and d quarks are simply going along for the ride (they do not actually participate in the weak decay). Such an interaction satisfies all the requirements:
the mass of the Λ0 greater than the sum of the proton and pion masses; charge
is conserved (0 = 1 - 1); the interaction only involves quarks; lepton numbers are trivially conserved (0 = 0); the net quark number is conserved (1 =
1 + 1 - 1); and one quark goes into the reaction and three come out. T
­ herefore,
because of the weak interaction, the Λ0 baryon is unstable. Indeed, all baryons
other than the proton (the baryon with the lowest mass) are unstable. Even
isolated neutrons (symbol: n) can decay via the weak decay process
n = (ud) d W(ud) u + e- + ν
e = p+ + e- + ν
e
__
__
(CA.2)
Exercise CAX.2
This decay is possible because an isolated neutron’s mass is just barely larger
than those of the proton and the electron combined (the neutrino’s mass is
negligible). Check that this process obeys the other five rules.
Neutrons inside atomic nuclei are protected against this decay for reasons we
will discuss more fully in unit Q, but basically because changing a neutron
to a proton in a nucleus typically has energy consequences that would make
such a decay violate the law of conservation of energy. But the proton is the
only completely stable baryon.
One might think that the lightest charged mesons (the π+ and π – pions)
would be stable for the same reason that the electron is stable. But valid weakinteraction decay processes exist for these particles as well. For example
π – = u
d Wµ - + ν
µ
__
__
(CA.3)
works because the pion’s mass (0.149 proton masses) is greater than the
muon’s mass, charge is conserved, the muon-family lepton number is conserved (0 = 1 - 1), the quark number is conserved (-1 + 1 = 0 + 0), and two
particles come in and two go out. Therefore, even the lightest mesons are
unstable.
CA.6 Conclusion
Exercise CAX.3
245
_
What is the decay process for the π+ meson (quark structure ud)?
The bottom line is that the only stable particles are neutrinos, the electron,
the proton, and the neutron (the latter only if it is part of a nucleus). Therefore, all matter that lasts is constructed of these three particles.
CA.6
Conclusion
Let me note one final aspect of the Standard Model before closing. In the
1960s, Steven Weinberg, Abdus Salam, and Sheldon Glashow independently
discovered that one can think of the electromagnetic and weak interactions
as but two aspects of a larger whole, which came to be called the electroweak
interaction. Work was completed on this theory in the early 1970s. This represents the last major advance in fundamental physical theory.
Electroweak theory posited the existence of a new kind of field called
the Higgs field, whose particle expression is the Higgs boson. Verification of
this prediction finally came in July of 2012 when the discovery of the Higgs
boson was announced by physicists associated with the Large Hadron Collider, currently the most powerful particle accelerator operating in the world.
This constitutes powerful support for the Standard Model.
However, it also calls the classic “four fundamental interactions” picture
summarized in table CA.2 into question. Should we count the electroweak
interaction as a single interaction or as two? Should we add in the Higgs field
as a new kind of fundamental interaction?
However, in the context of understanding particle interactions in the
current universe, the weak interaction, even if it is fundamentally linked to
the electromagnetic interaction, still expresses itself quite differently, and so
separating these interactions is still quite useful. The Higgs field is also significantly unlike the four interactions listed. In particular, it has nothing to
do with how two particles interact with each other (it appears more as a sort
of background for such interactions) so it is not really quite an interaction in
the sense we are talking about. Therefore, though we should understand that
table CA.2 is a bit simplified, it is still very useful as it stands.
This is but a taste of the fascinating physics involved in the Standard
Model. We will learn a bit more about this model as we go on (particularly
in unit Q), but one needs to be familiar with quantum mechanics (an upperlevel undergraduate topic) to delve much more deeply, and one needs to
understand relativistic quantum field theory (a graduate-level topic) to
understand the model fully. Therefore, this model’s beauty and breadth will
continue to unfold before you as you continue to study physics.
At the same time, we also know that the Standard Model cannot be complete. It is not and cannot be made compatible with general relativity, our
other fundamental theory of nature. We do not yet have a complete understanding of why matter particles dominate over antimatter particles in our
universe: the Standard Model does not predict this. Moreover, astrophysicists
have in the past decade determined that about 95% of the mass-energy of the
universe takes the forms of what we call “dark matter” and “dark energy,”
which are not predicted by the Standard Model and have no explanation
within it. The coming decades promise to be very exciting as physicists push
to move beyond the Standard Model to something new!
Appendix CA
246
The Standard Model
TWO-MINUTE PROBLEMS
CAT.1 Pions, the lightest mesons, are discussed in the text.
Kaons (K +, K 0, K -) are mesons that have masses significantly larger than the pions but smaller than other mesons.
What is the quark composition of the K- kaon?
_
A. u s
__
B.
u s
_
C. d
_ s
D.
d s
_
E. c s
_
F.
c s
CAT.2 Suppose I throw a ball toward the floor. The ball
hits the floor and rebounds upward. What type of fundamental interaction acting between atoms in the ball and
the atoms in the floor exerts the force that causes the ball
to reverse its direction?
A. The strong interaction
B. The electromagnetic interaction
C The weak interaction
D. The gravitational interaction
E. Some combination of the above (specify)
F. Some other kind of interaction (specify)
G. One cannot determine the interaction without knowing more about inter-atomic interactions.
CAT.3 The following equation also represents a possible
weak-interaction decay process for the Λ0: Λ0 Wp+ + e - + ?
What is the missing particle?
A. e+
B. n
C. ν
__e
D.
νe
E. π 0
F. There is no missing particle.
CAT.4 Classify the following proposed weak-interaction
processes as being (A) absurd or (C) credible. You may
assume that energy
conservation is satisfied.
__
(a) µ+ We- + ν
__e + νµ
(b) µ+ We+ + ν
e + ν
__µ
(c) µ+ We+ + νe + νµ
(d) s Wd + e+ + e(e) s Wu + e(f) s Wd + e+ + νe
__
(g) s Wd + u + u
__
_
(h) n
W p+ e+ + νe (n = neutron, p = proton)
CAT.5 No weak process can cause a muon neutrino to
decay into something else. T or F?
HOMEWORK PROBLEMS
CAM.1 What are at least two possible weak-interaction
decay processes for the τ- lepton?
CAM.2 Write out answers to problem CAT.4, and for each
interaction either argue that the reaction satisfies the weakinteraction rules or describe the rule(s) it violates.
CAM.3 The Ʃ+ is a baryon with quark composition uus
whose mass is 1.268 proton masses, which is smaller than
that of any other positive baryon but the proton. It can
__
decay to a π 0 pion (uu) and something else. What else, and
why is this the only possibility?
CAM.4 The Ʃ - is a baryon with quark composition dds
whose mass is 1.276 proton masses, and has the smallest
mass of any negative baryon. It almost always decays to
__
a π- pion ( ud) and something else. What else, and why is
that the only possibility?
CAM.5 Supply the missing particles in the following decays
and explain why.
(a) Λ0 Wp+ + e- + ?
(b) π + Wµ+ + __
?
_
__
(c) K 0 Wπ+ + ν
e + ? (K 0 = d s, π- = d u )
__
(d) Ξ 0 Wπ 0 + ? (Ξ 0 = uss, π 0 = uu )
ANSWERS TO EXERCISES
CAX.1 (a) ∆++ = uuu. This is the only way to get a charge
twice that of the proton without involving quarks with
much larger masses than those of the u and d.
(b) To be the lowest-mass meson, the π+ must involve
only u or d quarks and/or their antiquarks. To be a quark–­
antiquark pair and
_ also have a positive charge, its composition must be ud.
CAX.2 n = (ud) d ⃯ (ud) u + e- + ν
e = p+ + e- + ν
e conserves
charge (0 = 1 – 1 + 0), involves only quarks and leptons,
conserves the electron family lepton number (0 = 0 + 1 - 1)
(and other lepton family numbers trivially), and conserves
__
the quark number (1 = 1 + 0 + 0), considering only the
quarks involved in the interaction. It also has one quark
going in and three particles coming out, for a total of 4
(again ignoring the quarks that don’t participate).
CAX.3 To conserve charge, the analogous process to the
one shown in equation CA.3 must be
π+ = ud⃯ µ+ + νµ
_
__
+
(CA.4)
Since the µ is an antimuon, the other particle must be a
neutrino (not an antineutrino) to conserve the muon family number. (Another possibility is π+ We+ + νe.)
Index
NOTE: Page numbers followed by t and f refer to tables and figures, respectively.
A
B
absolute zero, 190–191
airplanes, 4, 41, 62, 69, 79–80, 79f–80f,
162–164, 163f
allowed regions, in potential energy
diagrams, 136–137, 142, 143, 143f
ampere (unit), 10
angle(s), measurement of
in degrees, 10, 11, 87
in radians, 10, 11, 87
units for, 10
angle of attack, of wing, 79, 79f
angular momentum
conservation of, 93–94, 93f, 102–103,
102f, 110–111, 111f
cross product, 103–105, 103f–105f
example, 94–95, 94f, 95f
force and torque, 108–110, 109f, 110f
gyroscopic precession, 92–93, 92f
of moving objects, 107–108
moving particle, 105–106, 105f–106f, 232
of rigid object
analogous definition of, 88
limitations, 88–89
moment of inertia, 88, 89
ordinary momentum, 88
rotating objects, 106–108, 106f
symmetric rotating object, 89–90
torque, 91–92
twirl, 91
angular speed
vs. center of mass speed, 171
definition of, 84–85, 84f
angular velocity
vs. center of mass velocity, 178
connection to torque vector’s direction, 91
definition of, 87, 87f
direction, 87
Frisbee, 109–110
magnitude, 87
particle moving in circular path, 88, 88f
right-hand rule for, 87
rigid object, 89, 106
anticommutative property, 104
antimatter/matter engines, 80, 80f
antiparticles, 240
antiquities mobsters, 50
arbitrary masses, handling, 137, 144, 144f
arbitrary vectors, 44–45
asteroid impacts, 234–235, 235t
atom(s)
interactions between, 20, 21f, 30, 30f, 136,
138–139, 139f, 212
in structure of matter, 240, 242
Black, Joseph, 188
Boltzmann’s constant, 190
bond(s)
characteristic potential energy curve, 206
electrostatic repulsion, 206
energy release and absorption in, 207
forming, 206–207
ignition spark, 207
kinetic energy, 207
potential energy diagram for, 206, 206f
C
caloric, definition, 188
caloric model of thermal energy
calories, 188–189
conservation of energy, 190
definition, 188
Joule’s apparatus, 189–190, 189f
calorie(s)
definition of, 188–189
food calories, 211
candela (unit), 10
Celsius degrees (unit), 191
center of mass (CM), 138
fifth principle of modern mechanics,
58, 58f
kinetic energy, 156, 176, 177
motion of, 57–58
rigid object, 58–59
of system
calculation of, 54–56
complicated systems, 56
definition of position, 54
motion in, 57–59
particle model of, 58
two-particle system, 55
charge, electrical, 125
SI units of, 10, 125
sign of, 125
chemical energy, 211, 211t
symbol for, 213
CM. See center of mass
CoE. See conservation of energy
collision interactions
asteroid impacts, 234–235, 235t
completely inelastic, 222–225
definition of, 71
conservation laws, 232–233
elastic, 222, 224, 226–230
slingshot effect as, 230–231, 231f
inelastic, 222–225, 227, 228, 230, 232
asteroid impact as, 234–235, 235t
one-dimensional, 224–227
slingshot effect, 230–231, 231f
superelastic, 222
thermal energy transfer in, 192
two-dimensional, 227–230
types of, 224
color-neutrality, 242–243
column vector(s), 42
CoM. See conservation of momentum
commutative property
of dot products, 154, 157, 176
of vector addition, 104, 157
completely inelastic collisions, 224
component form
addition of vectors in, 23, 24, 37
of cross product, 100, 104–105, 104f,
105f, 157
of dot product, 154, 157, 217
subtraction of vectors in, 23, 23f, 42f, 43
component vectors
definition of, 102
notation for, 102
comprehensive conservation-of-energy
master equation, 216
compression interactions, 29
in contact interaction, 162
conceptual models, 4
conduction, heat transfer, 214
conservation law, 6
conservation of angular momentum
(CAM), 93–94, 93f, 179–180
in collisions, 232
examples, 94–95, 94f–95f
link to orientation symmetry,
110–111, 111f
model of, 102–103, 102f
in neutron star formation, 97
in particles, 106
problem-solving checklist for, 68, 71, 75
symmetries underlying, 6
conservation of energy (CoE)
complications associated with, 126
in conceptual structure of physics, 2, 6, 7
and degrees of isolation, 126
and friction, 155
in interactions
contact, 154
with the earth, 147
law of, 185, 205
and momentum requirement, 155, 156
power, 126
problem solving framework for, 127–129
subtlety of concept, 120
symmetries underlying, 6
247
248
conservation of momentum (CoM),
156, 156f
in airflow around wing, 79, 79f
checklists, 76
collisions, 71, 232
in conceptual structure of physics, 2
degrees of isolation
floats in space, 70
functionally isolated, 70
examples, 76–79
and friction, 30, 155, 171, 187, 188
in interactions with the earth, 53,
62–63, 67
law of conservation of momentum, 70
master equation for, 75
problem solving
algebra with symbols, 74
in cognitive psychology, 74–75
drawing a picture, 72
four core tasks, 71
knowns and unknowns, 73
master equation, 73
model selection, 72
model tool chest, 73
tracking units, 74
tricks to, 75
in rocket propulsion, 79–80, 80f
symmetry underlying, 6
contact interactions, 29, 29f, 138
analogous decomposition, force,
162–163, 163f
compression and friction, 162
conservation of energy in, 153–154
conservation of momentum in, 70
energy implications, 162
frictional part of, 162, 188
internal interaction, 163–164
normal force, 162, 163f
rigid sliding object, 162
rolling-without slipping problem,
180, 181
rotational energy, 178–179
tension force, 163, 163f
with thermal energy changes
problem-solving framework for,
196–198
convection, heat transfer, 214
coordinate axes, 38, 75, 127
coordinates of an object, 41
coulomb (charge unit), 125
Coulomb constant, 125
cross product
component form of, 104–105, 105f
definition of, 103, 103f
magnitude, 104, 104f
properties of, 104
right-hand rule for, 100, 103, 104
D
dark energy, 245
dark matter, 245
Dawn spacecraft, 80
Deep Space 1 probe, 80, 80f
degree (unit), 10
deuterium–tritium fusion reactors, 212
Index
dimensional analysis, 12–13
direction, of vector, 23
displacement
definition of, 38
vector as, 38
displacement vectors
column, 42, 42f
components of, 42–43
definition of, 42
magnitude of, 43
position, 41–42
distributive property
of cross product, 104, 108
of dot product, 157, 157f, 158, 177, 185
dot product, 157–158, 157f
component form for, 154, 157, 217
definition of, 154, 157
interpretation of, 157, 157f
properties of, 154, 157, 177–178
drag. See wings (airplane)
drag force, 162–163, 163f
E
earth. See also gravitational interactions
effects of asteroid impact on, 234–235,
235t, 239
ignoring kinetic energy of, 163, 171, 180
precession of, 92–93, 93f
and reference frames, 40–41, 41f, 62, 67
Einstein, Albert, on nature of physics,
28, 53
elastic collisions, 224, 230
definition of, 222
slingshot effect in, 231
electrical charge
units of, 10
sign of, 125, 125f
electric current as a form of energy
transfer, 205, 205t, 213
electric energy, as hidden energy,
201–202
electric power, measurement of, 10, 80
electric rocket engines, 80
electromagnetic field theory, 5, 6
in conceptual structure of physics, 2, 6,
6f, 7
history of, 6
electromagnetic interaction, 125, 241, 241t
in atoms, 30, 138, 212
electrostatic potential energy, 139
electromagnetic radiation, 213–215
electromagnetic waves as a form of energy
transfer, 14
electron-neutrino, properties of, 241t
electron(s)
properties of, 241t
in structure of matter, 20, 21f
electrostatic interactions, 29, 125, 125f
electrostatic potential energy, 139
electrostatic repulsion, 206
electroweak interaction, 245
electroweak theory
in conceptual structure of physics, 245
history of, 245
elementary particles, 240, 242
energy. See also total energy
conservation of. See conservation of
energy
definition, 120
equation, 144
hidden forms of, 119, 121, 126, 170,
204, 213
internal, 119, 126–129, 136–140, 144–147,
155, 159–162, 164, 170–173, 177–181,
186, 187, 190, 191, 193, 194,
204–217, 221, 222, 224–228, 230,
232, 233
kinetic, 118, 120–122, 124, 126, 128, 136,
139–142, 155, 156, 158, 159, 170,
172, 173, 191, 192, 198, 206–208,
210, 213, 222, 224, 225, 234–235
latent, 204, 209, 210, 213, 216, 217,
234–235
vs. momentum, 120–121
nuclear and chemical, 205, 212–213,
212f, 224
potential, 118–120, 121f, 122–125, 123f,
125f, 128, 133f, 136–140, 143–146,
170, 171, 180, 187, 188, 191–193,
196, 206, 207, 216, 217, 224
rotational, 170–181, 185
SI unit of (joule), 121
thermal, 73, 126, 186–198, 204, 208–211,
213, 214
transfer modes of, 213, 213t
equilibrium position in potential energy
diagrams, 151, 165
equinoxes, precession of, 93
escape speed, 15, 149
evaluation step, in problem solving, 174,
174f, 175, 175f, 185
exhaust speed, 80
experiments, reproducible, as hallmark of
science, 2, 4–5
extended object. See also systems
center of mass, 56
collisions, three conservation laws, 232
definition of, 54
examples of, 56, 109–110, 110f, 174–175,
174f–175f
implications of, 109, 109f
kinetic energy, 177
rigid, 22, 58
thermal energy, 191
external interactions, 54
definition of, 21, 154, 156, 158
vs. internal interactions, 57, 120
and momentum of system, 58, 62, 68, 70,
71, 95, 120, 126, 155, 159, 160, 196,
224, 230
and momentum requirement, 154, 156,
156f, 158, 159, 161, 179, 196
F
first law of thermodynamics, 194
fission reactions, 205, 212
floating in space as a mode of isolation,
120, 187
food calorie, 211
forbidden regions, 142, 142f
249
Index
force
average, 162
definition, 27
of gravitational interaction
near Earth’s surface, 28, 29, 140, 197
mass, 27
newton (unit), 27
vs. power, 10, 126
vs. torque, 85, 91, 101, 107–111, 109f–111f
SI unit of (Newton), 10, 19, 27
frames of reference. See reference frames
freely falling frames, 60
freely floating frames, 60
friction interactions, 29
in conservation of energy problems, 196
in conservation of momentum problems,
76, 93
handling in problem solutions, 77
in Newtonian mechanics, 186
and thermal energy, 187, 192,
196–198, 197f–198f
Frisbee
angular momentum, 109–110, 110f
angular velocity, 109–110
functional isolation, definition of, 94, 198
fusion reactions, 205, 212
G
Galileo, Galilei, 4–5, 40
gas(es), phase changes of, 187, 195,
208, 209
general relativity in conceptual structure
of physics, 2, 5
Global Positioning System (GPS), 65
gluons, in mediation, 241t, 242
gravitational field strength, 123, 123f, 124
gravitational field vector, 19, 27
gravitational interactions, 120, 121f,
241, 241t
atoms interaction, 138–139
and the earth’s precession, 92–93, 93f
force of
near the earth’s surface, 28, 29, 140, 197
macroscopic object separation, 138
potential energy formula
graph of, 124, 124f, 139, 139f,
141–142, 206, 206f
for objects near the earth, 118, 123,
128, 181, 197, 216–217
graviton, 241
Greek philosophical tradition, 2, 4
gyroscopic precession, 92–93, 92f
H
heat. See also latent heat; specific “heat”
definition of, 193
vs. specific “heat,” 187, 194–196,
194f, 195t
vs. thermal energy, 187, 193–194, 194f,
213, 214
transfer mechanisms, 214–215, 215f
helping diagrams
in conservation of energy problems,
128, 147
in conservation of momentum problems,
75, 94
in problem-solving process, 72, 74–75
hidden forms of energy, 119, 121, 126, 204,
206, 213
horsepower, 126
I
ideal spring model, 146
impulse(s), 25
specific (of rocket), 69, 80
vs. twirl, 91, 108, 126, 160
vs. work, 85, 155, 160
inelastic collisions, 224
inertial reference frames
definition of, 60
interactions with the earth, 62–63
Newton’s first law, 59–60
vs. noninertial reference frames, 60, 61
truck frame, 59, 59f
interaction diagrams
in conservation of angular momentum
problems, 93–94
in conservation of energy problems,
127, 147
in conservation of momentum problems,
78, 79
in thermal energy problems, 197, 210
interactions. See also specific types of
interactions
compression, 29
conservation of energy in, 70, 118, 119,
122, 124, 126–129, 139, 146–147, 159,
163, 193, 196, 206, 226, 229
contact, 29, 29f
definition of, 120
in describing motion, 21–22, 21f–22f
diagrams, conventions, 79
with the earth, 62–63
electromagnetic, 125, 241, 241t
electrostatic, 29, 125, 125f
electroweak, 245
external, 54
friction, 29
fundamental, 30, 118, 120, 125, 240–242,
241t, 245
gravitational, 26–28, 26f, 28f, 241, 241t
inter-atomic springs, 28
internal, 54
long-range, 30
macroscopic, 30, 30f
magnetic, 30
momentum transfer in, 30, 58, 84, 86
strong (nuclear), 240, 241t
tension, 29
transfer angular momentum, 86
weak (nuclear), 241, 241t
interatomic potential energy, 139, 139f
internal energy, 126
bonds
characteristic potential energy
curve, 206
electrostatic repulsion, 206
forming, 206–207
ignition spark, 207
kinetic energy, 207
potential energy diagram, 206, 206f
chemical energy, 211, 211t
food energy, 216–217
latent heat
definition of, 208
examples, 210–211
latent energy, 209
phase changes, 208–209
of various substances, 209, 209t
nuclear energy, 212–213, 212f
internal interaction, 54
International Space Station (ISS), 60–61, 61f
ion engines, 80
ironic paradox, 5
isolated systems
conservation of angular momentum in,
68, 70, 73, 75, 85, 93, 93f, 105, 120
conservation of energy in, 70, 119, 126,
139, 140, 181, 187, 190, 206, 210, 228
conservation of momentum in, 68, 70,
73, 75, 187, 196, 228
definition of, 126
degrees of isolation, 68, 70–71, 83
isolated system, total angular
momentum, 93
J
Joule, James Prescott, 189–190, 189f
joule (SI unit of energy), 121
K
kelvins (unit), 190
Kelvin temperature scale, 191
kilogram (unit), 10, 13, 19, 24, 27
kinetic energy
center of mass, 156, 176, 177
definition, 120
of the earth, ignoring, 171, 180, 233
in interactions, 120–122, 121f¸ 124, 125,
139, 140, 147, 155, 156, 164, 188,
191, 192
internal energy, 177
in terms of momentum, 118, 120, 121,
126, 179
rotational. See rotational kinetic energy
SI units of, 121
translational, 186
unequal mass interaction, 122
L
Large Magellanic Cloud, 219
latent energy, 204, 209, 209t, 210, 213,
216–217, 234–235
latent heat
definition of, 208
examples, 210–211
latent energy, 209
in phase changes, 208–209
of transformation, 204, 209
of various substances, 209, 209t
law of conservation of angular
momentum, 70
250
law of conservation of energy, 204, 205
law of conservation of momentum, 70
law of cosines, 156, 156f
leptons, 20, 240, 241t
mediators for, 241t, 243
properties of, 241t
in structure of matter, 21, 21f
lift force, 163, 163f
linear property of dot products, 154, 157
liquid(s), phase changes of, 187, 195,
208, 209
long-range interactions, 30
Loofayan raid, 134
loop quantum gravity, 6
M
macroscopic interactions, 30, 30f
macroscopic objects, definition of, 21
magnetic interactions, 30
magnitude, of vector, 23
definition of, 23
notation for, 23
mass
center of
complicated systems, 56
definition of position, 54
fifth principle of modern mechanics,
58, 58f
motion of, 57–58
rigid object, 58–59
two-particle systems, 55
force, 27
momentum, 25
SI units of, 24
vs. weight, 27–28
master equation
comprehensive
conservation-of-energy, 216
in conservation of angular
momentum, 94
matter, fundamental structure of,
20–21, 21f
matter particles, 240, 242
matter transfer as a form of energy
transfer, 213
matter/antimatter engines, 80
mechanical waves as a form of energy
transfer, 213
mechanics
commonsense models of, 20
in conceptual structure of physics,
5–7, 6f
definition of, 20
history of, 20–21
mediator particles, 241–242
meter (unit), 10
model building process
example, 7–10
history of physics, 5
levels, 4
science, nature of, 4–5
structure of physics, 5–6, 6f
models. See also conceptual models
common-sense, 20
conceptual, 4
Index
Eratosthenes’s, 9
of extended object as a particle, 54
good, characteristics of, 4
limitations of, 4
modern mechanics, principles of, 20
mole (unit), 10
moment of inertia, 88, 89, 173
calculation, basic trick, 174–175,
174f, 175f
complicated object, 176
momentum, 22. See also angular
momentum
conservation of. See conservation of
momentum (CoM)
definition of, 24
financial analogy, 25
force, 27
gravitational interaction, 26–28,
26f, 28f
mass, 25
notation, 25
of a particle, 30–31
of system, 70, 73, 79, 156
total, definition of, 70
transfer of, 30–31, 31f
vector nature of, 31
momentum requirement
in conservation of energy
problems, 156
definition of, 156
and kinetic energy, 159
vs. work, 159
motion
speed, 21–22, 22f
of system center of mass,
57–59, 58f
velocity, 22
muon, 241t
muon-neutrino, properties of, 241t
N
natural processes, 188
neutrino, 241t
neutron, 240
Newton, Isaac
in the history of physics, 5
ingenious model, 5
principles of modern mechanics, 20
newton (SI unit of force), 10
Newtonian mechanics, 6
and conservation of energy, 6
and earth’s precession, 93
history of, 5
in structure of physics, 5–6, 6f
Newton’s laws
first law, 61
and extended objects, 22
and inertial frames, 59–60, 59f
Newton’s theory, 5
Noether, Emmy, 6
Noether’s theorem, 7, 88
noninertial reference frames
definition of, 60
distinguishing from inertial, 60
normal part, of contact interactions, 162
North Star, 93
nuclear energy, 212–213, 212f
nuclear reactors, 212
O
ohm (unit), 10
one-dimensional collisions, 224–227
one-dimensional system, arbitrary
masses, 144
operational definition, 35
ordinary momentum vs. angular
momentum, 88
orientation, quantifying, 86–87, 86f
origin of reference frame, 40
P
particle(s)
angular momentum of, 105–106,
105f, 106f
elementary, 20, 240, 242
kinetic energy, 173
macroscopic object as, 21
matter, 240, 242
mediator, 241–242
momentum and impulses, 24–25
point-like, 20
systems of, 54
velocity, 22
particle model, for system’s center of
mass, 53
pascal (unit), 10
phase changes, 208–210
photons, 241–242, 241t
physics
history of, 5
structure of, 5–6, 6f
position, of reference frame, 41
potential energy, 188
absolute, inability to determine,
122–123
defined only up to a constant, 122
definition, 120, 122
in electromagnetic interaction, 125
electrostatic interaction, 125, 125f
graphs
arbitrary mass limitation, 143–144
back-up safety system,
elevator, 147
interatomic interactions, 138–139
low-mass objects, 146
macroscopic objects interactions, 138
potential energy diagram. See
potential energy diagram
spring approximation, 145–146, 145f
gravitational, 123, 123f
graph of, 124, 124f
interaction, 120, 121f, 123,
124, 124f
for objects near the earth, 124
of ideal spring, 146
measurement, 122
negative energies, 124
reference separation, 122–123
between spherical objects, 123–125
251
Index
potential energy diagram
for bonds, 206f, 206–207
definition of, 139
equilibrium points, 142–143, 143f
examples of, 140f
forbidden regions, 142, 142f
force and slope, 142
horizontal energy line on, 140
initial conditions and, 141
one-dimensional system, 139–140, 140f
qualitative features, 140, 141f
reading of, 140–141, 141f
system’s total energy, initial condition,
140f, 141
for systems with arbitrary
masses, 144
two interacting atoms, 140–141, 141f
pound (unit), 10
power
definition of, 126
vs. force and torque, 126
watt as SI unit of, 126
precession of equinoxes, 93
problem-solving, physics
algebra with symbols, 74
checklist
for conservation of angular
momentum, 93f
for conservation of energy, 127
for conservation of momentum, 76
general, 76, 127
in cognitive psychology, 74–75
drawing a picture, 72
four core tasks, 71
knowns and unknowns, 73
master equation, 73
model selection, 72
model tool chest, 73
radian, as measure of angle, 173
radioactive waste, 212
tracking units, 74
tricks to, 75
problem-solving framework, 71–75
in conservation of angular momentum
problems, 93f, 93–94
in conservation of energy problems,
127–129
in conservation of momentum problems,
75–79
for thermal energy problems, 196–198
proton(s)
interactions between, potential energy
functions for, 206
quark, 240
in structure of matter, 20, 21f
Q
quantum electrodynamics (QED), 5
quantum mechanics, 139
history of, 5
structure of physics, 5–6, 6f
quark(s), 240
mediators for, 241t
properties of, 241t
in structure of matter, 20, 21f
R
S
radian, as measure of angle, 173
radiation, heat transfer, 214–215
radioactive waste, 212
reduced mass, 144–145
reference frame, 40–41, 41f
conventions for, 40–41, 41f
floating in space, 60–62, 70
inertial, 59–60
definition of, 59
distinguishing from
noninertial, 60
examples of, 59–60
and interactions with the
earth, 62–63
Newton’s first law and, 59–60
noninertial
definition of, 60
distinguishing from inertial, 60
right-handed, 40
selection of, 62–63
standard orientation of, 40
and vectors, 40–41
reference separation, 122–124
relative velocity, 144
relativistic quantum field
theory, 5
relativity. See general relativity; special
relativity
reproducible experiments, 4
right-hand rule
for angular momentum, 92
for angular velocity, 87, 87f
for cross-product, 103, 103f
for reference frame, 40, 41f
rigid object, 106, 161
angular momentum of, 88–90, 89f
definition of, 58
motion of, 58–59
rockets, 79–80, 80f
rotating objects, 106–108, 106f
rotational angular momentum, 107
rotational energy
vs. center-of-mass kinetic
energy, 177
center-of-mass vs. angular velocity,
178, 179f
and conservation of angular
momentum, 179–180
contact interaction, 178–179
definition of, 172–173
formula for, 173
gravitational interaction, 179, 179f
internal energy, 177
moments of inertia
calculation, basic trick, 174–175,
174f, 175f
complicated object, 176
momentum requirement, 179
of an object at rest, 172–173
rigid rotating object, 176–177
rolling object, 172, 172f,
177–178, 178f
rotational speed, 173
Rumford, Count, 189
science, nature and history of, 4–5
second (unit), 10
sign errors, avoiding, 48
SI units, 10, 10t
of charge, 125
conversion of, 11–12
derived units, 10
of energy, 127, 190
of force, 27
of mass, 24
of momentum, 24
standard prefixes for, 10, 10f
of temperature, 190, 191
slingshot effect, 230–231, 231f
solid(s), phase changes and, 208
special relativity, 5, 6
in conceptual structure of physics, 2, 6f
history of, 5–7, 6f
specific “heat”
common substances, 195, 195t
definition of, 195
importance of quotation marks, 195–196
vs. temperature, 194–195, 194f
for various substances, 195, 195t
specific impulse, 80
speed
angular, 88
vs. center of mass speed, 170
definition of, 84, 84f
definition of, 21–22, 22f
in describing motion, 21–22
escape, 15, 149
exhaust, 80
spring approximation, 145–146, 145f
spring constant, 136, 145
spring, ideal
potential energy formula, 124–125
graph of, 124, 124f
uses of, 124
stable equilibrium point, in potential
energy diagrams, 143, 143f
Standard Model, 5, 20, 21f
color-neutrality, 242–243
electromagnetic interaction, 241, 241t
electroweak theory, 245
fundamental interactions in, 241
gravitational interaction, 241, 241t
history of, 5–7, 6f
matter particles, 240, 242
mediator particles, 241–242
quarks in, 241
stable particles, 244–245
strong interaction, 240, 241t
weak interaction, 241, 241t,
243–244, 244f
standard orientation, of reference
frames, 40
statistical mechanics, 6
in conceptual structure of physics, 2, 6f
history of, 6
Stefan-Boltzmann law, 214
string theory, 6
strong (nuclear) interaction, 240
super-elastic collisions, 224
252
sun (as a fusion reactor), 212, 212f
symmetric object, angular momentum
in, 85
symmetry principles, 6–7
in conceptual structure of physics,
2, 6f
in momentum transfer, 70, 86
three basic, 6–7
system. See also isolated systems
center of mass of
calculation of, 52–53
complicated systems, 56
definition of position, 54
motion in, 53
particle model of, 53
two-particle system, 55
definition of, 54
momentum of, 57, 70
total energy of, 120
T
tau, properties of, 241t
tau-neutrino, properties of, 241t
temperature
absolute zero, 190–191
definition of, 190
Kelvin scale, 191
SI unit of, 190–191
vs. thermal energy, 190–191, 194–196,
194f, 195t
tension interaction, 29
theories in science, 4
thermal energy
caloric model of 188–190
calories, 188–189
conservation of energy, 190
definition, 188
Joule’s apparatus, 189–190, 189f
in collisions, 196
conservation of energy problems,
196–198
definition of, 193, 204
and “disappearing” energy, 188
and friction, 192
first law of thermodynamics, 194
friction transforms, 192, 192f
vs. heat, 194
microscopic
absolute temperature scale and
zero, 190–191
contemporary model, energy
storage, 190
vs. kinetic energy, 191
problem-solving framework for,
196–198
specific “heat”
common substances, 195, 195t
definition, 195
importance of quotation marks,
195–196
vs. temperature, 194–195, 194f
tracking, 193
work, definition, 193
work done calculation, 192
work in, 193–194, 194f
Index
thermal contact interactions,
problemsolving framework for,
196–198
thermal physics
contemporary model of, 190–191
history of, 188–190
thermal radiation, 214
Thompson, Benjamin, 189
tops, precession in, 92
torque, 126
and angular momentum, 91–92
compared to force, 108–109
compared to power, 126
definition of, 91
implications for extended objects,
109, 109f
nonparallel to angular momentum,
92–93, 92f
parallel to angular momentum, 91–92
single particle, 108
specific point particle, 109
vector, 91–92
total energy, 120
definition of, 120
determined only up to a constant, 122
in interactions, 120–121, 121f
of multiparticle systems, definition
of, 120
negative, meaning of, 124
in potential energy diagrams, 139–143
translation step
in conservation of angular momentum
problems, 93–94
in conservation of energy
problems, 127
in conservation of momentum problems,
75–76
translational kinetic energy, 186
tritium, 212
turning points in potential energy
diagrams, 142, 142f, 143, 143f
twirl, 91
angular momentum and, 91–92
definition of, 91
compared to impulse, 91, 160
compared to work, 160
two-dimensional collisions, 227–230
two-object system, 144, 144f
U
unification, 5
unit(s). See also SI units
for angles, 10
consistency in use of, 13
of vectors, 45
unit awareness
benchmarks, 11, 11f
SI units and prefixes, 10, 10t
symbolic expressions, 11
unit conversion, 12–13
unit less, angles, 87
unit operator method, 12–13
universal gravitational constant, 124
unstable equilibrium point, in potential
energy diagrams, 143, 143f
V
vector(s)
addition of, 23, 23f
common errors in, 45–46
commutative property in, 104
in component form, 75
in one dimension, 47–48,
47f, 48f
can’t divide by, 46
column, 42
common errors regarding, 45–46, 46f
components, 40
notation for, 40–41
scalar, 115
core language of physics, 40
cross product of, 103–105,
103f–105f
definition of, 44
as displacement
column, 42, 42f
components of, 42–43
definition of, 42
magnitude of, 43
position, 41–42
dividing by vector, 24, 46
division by a number, 23
dot product of, 157–158, 157f
in component form, 157
definition of, 157
interpretation of, 157, 157f
properties of, 157–158
magnitude, 23
multiplication by a number, 24
negative of, 23
notation for, 23
in one dimension, 48
and ordinary number, product of,
43–44
reference frame, 40–41, 41f
rules, 45–46
subtraction of, 23
torque, 91–92
in two dimensions, 47–48, 47f, 48f
vector bosons, 241t
vector difference, 43
vector sum, definition of, 18, 23
velocity. See also angular velocity
definition of, 22
momentum transfer, 30
volt (unit), 10
W
watt (unit), 10, 126
weak (nuclear) interaction, 241
weight
definition of, 19
vs. mass, 19
wings (airplane), 79, 79f
angle of attack in, 79, 79f
drag of
as contact interaction, 162, 163f
lift of
and conservation of momentum, 79
as contact interaction, 163, 163f
253
Index
work
contact interactions
compression and friction, 162
energy implications, 162
internal interaction, 163–164
normal force, 162, 163f
rigid sliding object, 162
tension force, 163, 163f
definition of, 193
applied to astronaut,
159, 159f
box’s motion, 160–161
constant force vector, 160
differential work, 158, 160
external interaction, 159
negative work, 160
total external force, 158, 158f
total work done, finite
displacement, 158
dot product, 157–158, 157f
long-range interactions, 161
momentum requirement, 156, 156f
X
x axis, of reference frame, 40
x component, of vector, definition of, 43
x direction, definition of, 40
Y
y axis, of reference frame, 40
y component, of vector, definition
of, 43
y direction, definition of, 40
Z
z axis, of reference frame, 40
z component, of vector, definition
of, 43
z direction, definition of, 40
zero vector, definition of, 23
4
Be
9.012
12
Mg
24.31
20
Ca
40.08
38
Sr
87.62
56
Ba
137.3
88
Ra
(226)
3
Li
6.941
11
Na
22.99
19
K
39.10
37
Rb
85.47
55
Cs
132.9
87
Fr
(223)
89
Ac
(227)
57
La
138.9
39
Y
88.91
21
Sc
44.96
3
3B
104
Rf
(257)
72
Hf
178.5
40
Zr
91 .22
22
Ti
47.88
4
4B
106
Sg
(263)
59
Pr
140.9
91
Pa
(231)
58
Ce
140.1
90
Th
232.0
74
W
183.9
42
Mo
95.94
24
Cr
52.00
6
6B
105
Db
(260)
73
Ta
180.9
41
Nb
92.91
23
V
50.94
5
5B
92
U
238.0
60
Nd
144.2
107
Bh
(262)
75
Re
186.2
43
Tc
(98)
25
Mn
54.94
7
7B
1
H
1.008
93
Np
(237)
61
Pm
(147)
108
Hs
(265)
76
Os
190.2
44
Ru
101.1
26
Fe
55.85
8
94
Pu
(242)
62
Sm
150.4
109
Mt
(266)
77
Ir
192.2
45
Rh
102.9
27
Co
58.93
9
8B
Atomic mass
Symbol
95
Am
(243)
96
Cm
(247)
64
Gd
157.3
111
110
63
Eu
152.0
79
Au
197.0
47
Ag
107.9
29
Cu
63.55
11
1B
78
Pt
195.1
46
Pd
106.4
28
Ni
58.69
10
97
Bk
(247)
65
Tb
158.9
112
80
Hg
200.6
48
Cd
112.4
30
Zn
65.39
12
2B
13
3A
14
4A
15
5A
16
6A
17
7A
98
Cf
(249)
66
Dy
162.5
(113)
81
Tl
204.4
49
In
114.8
31
Ga
69.72
13
Al
26.98
5
B
10.81
99
Es
(254)
67
Ho
164.9
114
82
Pb
207.2
50
Sn
118.7
32
Ge
72.59
14
Si
28.09
6
C
12.01
100
Fm
(253)
68
Er
167.3
(115)
83
Bi
209.0
51
Sb
121.8
33
As
74.92
15
P
30.97
7
N
14.01
101
Md
(256)
69
Tm
168.9
116
84
Po
(210)
52
Te
127.6
34
Se
78.96
16
S
32.07
8
O
16.00
102
No
(254)
70
Yb
173.0
(117)
85
At
(210)
53
I
126.9
35
Br
79.90
17
Cl
35.45
9
F
19.00
103
Lr
(257)
71
Lu
175.0
86
Rn
(222)
54
Xe
131.3
36
Kr
83.80
18
Ar
39.95
10
Ne
20.18
2
He
4.003
Atomic number
1
H
1.008
2
2A
18
8A
1
1A
Periodic Table of the Elements
Short Answers to
Selected Problems
[Note that most of the derivation (D) problems as well as a
number of other problems have answers given in the problem statement. These problems are also useful for practice,
but their answers are not reiterated here.]
Chapter C1
B1 8.3 min. B3 5.9 × 1012 mi.
B5 2.59 Ms. B7 (b) v2sin 2θ/g.
B9
_______
____
D. M3 0.74. M5 (a)
vc = K GM/R , (b) 0.32 s. M7 T = KL/g .
_____
M9 (a) T = Km/ks , (b) same. R1 order of 5 × 1015 kg. R3
No, below the horizon. R5 D = K (v 20/
g)sin 2θ. R7 (Hint: When
was sunrise at the victim’s position?)
Chapter C2
B1 14.1 kg·m/s. B7b 316 My. B9 4.9 kg·m/s per second.
B11b 2.0 kg. B15d (1/3) m/s leftward. M2 the actual ratio is
1.42. M3 4m. M5b │v
W2│ =│v
W1│. D1e error is 1.5 × 10-4 %. R3
roughly 2 N if flow is 0.2 kg/s and speed is 10 m/s.
Chapter C3
B1 north. B3 │u
W + w
W│ = 6 m. B5 [14 m, 0 m, -8 m] B7b 13 m.
B9 89 m, 16° east of south. B11 [433 m, -250 m, 0 m]. B13 v
is a speed. M1 v
W = [ _ 19 , - _29 , - _29 ] × 108 m/s. M3 8°. M5 22 km,
28° east of south. R1 No. R3 4.2 km.
B1 1/4 B3 a bit outside. B5 4.6 pm. B7 x = 0, y = _ 15 L. B9
Type 4. M1 14.6 m. M3 11L/15. M5 1200 m. M7b 19 milliarcseconds. R1 __
141 R away from the hollow region. R3 No: dock
is too far away.
Chapter C5
B3 Throw a shoe! B5 not physically possible. B9 _ 1│v
W │ forward.
6
0
M1 1.18 mi/h. M2 angle is right, maybe so! M5 0.15 m/s,
5.7° east of north. M7 168 m away, behind the satellite.
D1c 460 s. R1b 5.6 h.
2
2
2
B1 464 m/s. B3 0.723 kg·m /s left. B5 0.027 kg·m /s . B7
(a) α = __
13
, (b) α = __
13
. B9______
α = _ 12 . M1 α = _ 58 . M3 0.8 ms. M5b
30
15
W. R1 about 4–8
4.2 m/s. M7 │L
W│ = _25
GM3R . M9 0.21
ω
times. R3 final angular velocity is zero.
Chapter C7
B1 1200 kg·m2/s upward. B3 [10 m2, -4 m2, 15 m2]. B6b
should be equal. B7 (a)–(d) Lz = -p0d. B9 (a) 0.89 kg·m/s2
right, (b) zero. B11 1.25 N. M2 _ 23 (m/M)(│v
W│/R). M4 4.5 ns.
M7 2750 lbs. R1c m/M = 0.0042.
256
B1 V(A) = -10 J, V(B) = 0,_______
V(C) = -5 J. B3 96%. B5 no, 28 m/s.
B7 66 ft. B9 (a) 0.6928 GM/R . (b) 12.4% error. B11 2│v
Wi│.
M1b 52%. M3 18.6 km/s. M5 39 m/s. M7 yes, barely. M9c
90 km/s. M11 5.6 pJ. R1 Yes, if I can jump 0.37 m on earth.
Chapter C9
B2 the allowed region lies between the turning points
at 0.07 nm and 0.17 nm. B6 forbidden for r < 0.05 nm. B7
remove 4 × 10-21 J. B9 about 23 pN. B11a 250,000 J/m2.
M1 3.2 J/m2. M3b Unstable equilibrium
at x = 0. M6c
_____________
2
2
No. M9 0.49 m/s. R4 D = D0
│v
W│ /│
v
W0│ + 1 .
Chapter C10
B1b 85°. B3 346 J. B5a 5.0 J exactly. B7 +, 0, 0, +. B9 (a) 0,
(b) 0. B11 (b) chemical, (c) ∆Vg . M1 23,000 J/m2. M4 6.3 m/s.
M7 16%. M9 You might make it! R1 0.2%. R3 go for it!
Chapter C11
_____
B1 7900 J. B6c 67 J. M1 α = 0.74. M3 _ 43│g
W│h . M5 220 m. M6b
2/77. R1 Values of α between 0.5 and 0.7 are reasonable, │v
W│
should be between about 15.5 m/s to 16.5 m/s. R3 3.74 km.
Chapter C12
Chapter C4
Chapter C6
Chapter C8
B5b 81 Cal. B7 220,000 J. B9 $0.92. B11 277 K. M1 85 m.
M3b 0.40 K. M5 22.0018°C. M7b 7.7 mK. M9 0.26 mK. M11
T increases at 0.078 K/s. R1 about 1000 m.
Chapter C13
B2 1 min. B4 1.3 kg/h. B6 35 times larger. B10 4300 y. M1
4.8 g of ice is left. M3 4.7 kg. M5 26 s. M7a 86%. M9 10 y.
M11 275 K. R1b about 0.26 kg total. R3 (a) 14.3 ft2h·°F/Btu,
(c) about 25 ft2 (d) 14.9 ft2h·°F/Btu.
Chapter C14
B1 0.40 m/s backward, 0.80 m/s forward. B3 1.2 m/s and
3.2 m/s, both forward. B5 520 J before, 500 J after. B7 must
be superelastic. B9 ∆U th is greater if the frisbee is spinning.
M1 velocities are simply reversed. M3 pin: 5.2 m/s, ball:
2.78 m/s. M5 oxygen: 76 m/s, 38° from helium’s original
direction. M7 elastic. M9 94%. M11 by a factor of 4. R1 Car B
must be moving.
Appendix CA
M1 τ - W
e- + stuff, τ - W µ- + stuff, τ - W π - + stuff. M3 p+.
__
M5 (a) ν
e(c) e-.
Some Physical Constants
Speed of light
Gravitational constant
Coulomb’s constant
Permittivity constant
Permeability constant
Planck’s constant
Boltzmann’s constant
Elementary charge
Electron mass
Proton mass
Neutron mass
Avogadro’s number
c
G
1/4πε0
ε0
µ0
h
kB
e
me
mp
mn
NA
Standard Metric Prefixes
(for powers of 10)
3.00 × 108 m/s
6.67 × 10-11 N·m2/kg2
8.99 × 109 N·m2/C2
8.85 × 10-12 C2/(N·m2)
4π × 10-7 N/A2
6.63 × 10-34 J·s
1.38 × 10-23 J/K
1.602 × 10-19 C
9.11 × 10-31 kg
1.673 × 10-27 kg
1.675 × 10-27 kg
6.02 × 1023
Power
1018
1015
1012
109
106
103
10-2
10-3
10-6
10-9
10-12
10-15
10-18
Commonly Used Physical Data
Gravitational field strength g =│g
W│
(near the earth’s surface)
Mass of the earth Me
Radius of the earth Re
Mass of the sun M⊙
Radius of the sun R⊙
Mass of the moon
Radius of the moon
Distance to the moon
Distance to the sun
Density of water†
Density of air†
Absolute zero
Freezing point of water‡
Boiling point of water‡
Normal atmospheric pressure
†
‡
Prefix
exa
peta
tera
giga
mega
kilo
centi
milli
micro
nano
pico
femto
atto
Symbol
E
P
T
G
M
k
c
m
µ
n
p
f
a
9.80 N/kg = 9.80 m/s2
5.98 × 1024 kg
6380 km (equatorial)
1.99 × 1030 kg
696,000 km
7.36 × 1022 kg
1740 km
3.84 × 108 m
1.50 × 1011 m
1000 kg/m3 = 1 g/cm3
1.2 kg/m3
0 K = -273.15°C = -459.67°F
273.15 K = 0°C = 32°F
373.15 K = 100°C = 212°F
101.3 kPa
At normal atmospheric pressure and 20°C.
At normal atmospheric pressure.
Useful Conversion Factors
1 meter = 1 m = 100 cm = 39.4 in = 3.28 ft
1 mile = 1 mi = 1609 m = 1.609 km = 5280 ft
1 inch = 1 in = 2.54 cm
1 light-year = 1 ly = 9.46 Pm = 0.946 × 1016 m
1 minute = 1 min = 60 s
1 hour = 1 h = 60 min = 3600 s
1 day = 1 d = 24 h = 86.4 ks = 86,400 s
1 year = 1 y = 365.25 d = 31.6 Ms = 3.16 × 107 s
1 newton = 1 N = 1 kg·m/s2 = 0.225 lb
1 joule = 1 J = 1 N·m = 1 kg·m2/s2 = 0.239 cal
1 watt = 1 W = 1 J/s
1 pascal = 1 Pa = 1 N/m2 = 1.45 × 10–4 psi
1 kelvin (temperature difference) = 1 K = 1°C = 1.8°F
1 radian = 1 rad = 57.3° = 0.1592 rev
1 revolution = 1 rev = 2π rad = 360°
1 cycle = 2π rad
1 hertz = 1 Hz = 1 cycle/s
1 m/s = 2.24 mi/h = 3.28 ft/s
1 mi/h = 1.61 km/h = 0.447 m/s = 1.47 ft/s
1 liter = 1 l = (10 cm)3 = 10-3 m3 = 0.0353 ft3
1 ft3 = 1728 in3 = 0.0283 m3
1 gallon = 1 gal = 0.00379 m3 = 3.79 l ≈ 3.8 kg H2O
Weight of 1-kg object near the earth = 9.8 N = 2.2 lb
1 pound = 1 lb = 4.45 N
1 calorie = energy needed to raise the temperature of 1 g
of H2O by 1 K = 4.186 J
1 horsepower = 1 hp = 746 W
1 pound per square inch = 6895 Pa
1 food calorie = 1 Cal = 1 kcal = 1000 cal = 4186 J
1 electron volt = 1 eV = 1.602 × 10-19 J
( )
T = ( ___
5K ) (T
9°F
T = ____
1K (T[C] + 273.15°C)
1°C
[F]
+ 459.67°F)
( )
T[C] = ____
5°C (T[F] - 32°F)
9°F
T[F] = 32°F + ____
9°F T[C]
5°C
( )
Useful Astronomical Data
(1 AU ≡ mean distance from earth to sun ≡ 1.50 × 1011 m)
Object
Mass
Sun
Moon
Mercury
Venus
Earth
Mars
Jupiter
Saturn
Uranus
Neptune
Pluto/Charon
Ceres (asteroid)
Halley’s comet
1.99 × 1030 kg
7.36 × 1022 kg
0.0553ME
0.815ME
5.98 × 1024 kg ≡ ME
0.107ME
318ME
95.2ME
14.5ME
17.2ME
0.00245ME
9.5 × 1020 kg
2.2 × 1014 kg
Mean
Radius
Semimajor
Axis*
Orbital
Period
Orbital
Eccentricity
696,000 km — — —
1,740 km
384,000 km 27.3 d
0.055
2440 km 0.387 AU 0.241 y
0.206
6052 km 0.723 AU 0.615 y
0.007
6371 km 1.000 AU 1.000 y
0.017
3390 km 1.524 AU 1.88 y
0.093
69,900 km 5.204 AU 11.9 y
0.049
58,200 km 9.582 AU 29.5 y
0.056
25,400 km
19.201 AU 84.0 y
0.046
24,600 km
30.047 AU
165 y
0.009
1187/606 km
39.482 AU
248 y
0.254
470 km 2.767 AU 4.60 y
0.079
≈ 7 km
17.94 AU 76.1 y
0.967
Based mostly on NASA data from <nssdc.gsfc.nasa.gov/planetary/>. Pluto/Charon data is from the New Horizons mission (as of October, 2015).
*An orbit’s semimajor axis is approximately equal to its mean orbital radius.
Six Ideas
That Shaped
Physics
Unit N: The Laws of Physics
Are Universal
Third Edition
Thomas A. Moore
SIX IDEAS THAT SHAPED PHYSICS, UNIT N:
THE LAWS OF PHYSICS ARE UNIVERSAL, THIRD EDITION
Published by McGraw-Hill Education, 2 Penn Plaza, New York, NY 10121. Copyright © 2017 by
McGraw-Hill Education. All rights reserved. Printed in the United States of America. Previous editions
© 2003, and 1998. No part of this publication may be reproduced or distributed in any form or by any
means, or stored in a database or retrieval system, without the prior written consent of ­McGraw-Hill
Education, including, but not limited to, in any network or other electronic storage or transmission, or
broadcast for distance learning.
Some ancillaries, including electronic and print components, may not be available to customers outside
the United States.
This book is printed on acid-free paper.
1 2 3 4 5 6 7 8 9 0 RMN/RMN 1 0 9 8 7 6
ISBN 978-0-07-760093-8
MHID 0-07-760093-2
Senior Vice President, Products & Markets: Kurt L. Strand
Vice President, General Manager, Products & Markets: Marty Lange
Vice President, Content Design & Delivery: Kimberly Meriwether David
Managing Director: Thomas Timp
Brand Manager: Thomas M. Scaife, Ph.D.
Product Developer: Jolynn Kilburg
Marketing Manager: Nick McFadden
Director of Development: Rose Koos
Digital Product Developer: Dan Wallace
Director, Content Design & Delivery: Linda Avenarius
Program Manager: Faye M. Herrig
Content Project Managers: Melissa M. Leick, Tammy Juran, Sandy Schnee
Design: Studio Montage, Inc.
Content Licensing Specialists: Deanna Dausener
Cover Image: NASA
Compositor: SPi Global
Dedication
To Brittany
whose intuitive understanding of Newtonian
physics is part of what makes her awesome
All credits appearing on page or at the end of the book are considered to be an extension of the
­copyright page.
The Internet addresses listed in the text were accurate at the time of publication. The inclusion of a
­website does not indicate an endorsement by the authors or McGraw-Hill Education, and M
­ cGraw-Hill
Education does not guarantee the accuracy of the information presented at these sites.
Library of Congress Cataloging-in-Publication Data
Names: Moore, Thomas A. (Thomas Andrew), author.
Title: Six ideas that shaped physics. Unit N, The laws of physics are
universal / Thomas A. Moore.
Other titles: Laws of physics are universal
Description: Third edition. | New York, NY : McGraw-Hill Education, [2016] |
2017 | Includes index.
Identifiers: LCCN 2015043353| ISBN 9780077600938 (alk. paper) | ISBN
0077600932 (alk. paper)
Subjects: LCSH: Mechanics—Textbooks.
Classification: LCC QC125.2 .M66 2016 | DDC 531—dc23 LC record available at
http://lccn.loc.gov/2015043353
www.mhhe.com
Contents: Unit N
The Laws of Physics Are
Universal
About the Author
ix
Preface
xi
Introduction for Students
Chapter N1
Newton’s Laws
N1.1
N1.2
N1.3
N1.4
N1.5
N1.6
Chapter Overview
The Newtonian Synthesis
Newton’s Laws of Motion
Vector Calculus
The Formal Definition of Velocity
The Formal Definition of Acceleration
Uniform Circular Motion
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter N2
Forces from Motion
N2.1
N2.2
N2.3
N2.4
N2.5
N2.6
N2.7
Chapter Overview
The Kinematic Chain
Classification of Forces
Force Laws
Free-Body Diagrams
Motion Diagrams
Graphs of One-Dimensional Motion
A Quantitative Example
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
xvi
2
2
2
4
6
8
9
11
13
16
17
19
20
20
20
22
22
24
25
27
30
32
33
34
37
Chapter N3
Motion from Forces
N3.1
N3.2
N3.3
N3.4
N3.5
N3.6
Chapter Overview
The Reverse Kinematic Chain
Graphical Antiderivatives
Integrals for One-Dimensional Motion
Free-fall in One Dimension
Integrals in Three Dimensions
Constructing Trajectory Diagrams
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter N4
Statics
N4.1
N4.2
N4.3
N4.4
N4.5
Chapter Overview
Forces from Motion: An Overview
Introduction to Statics
Statics Problems Involving Torque
Solving Force-from-Motion Problems
Solving Statics Problems
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter N5
Linearly Constrained Motion
N5.1
N5.2
N5.3
N5.4
N5.5
Chapter Overview
Motion at a Constant Velocity
Static and Kinetic Friction Forces
Drag Forces
Linearly Accelerated Motion
A Constrained-Motion Checklist
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
38
38
38
40
40
42
45
45
46
50
50
53
54
54
54
56
56
57
60
61
66
67
69
70
70
70
72
73
77
78
79
82
82
85
v
Table of Contents
vi
Chapter N6
Coupled Objects
N6.1
N6.2
N6.3
N6.4
N6.5
Chapter Overview
Force Notation for Coupled Objects
Pushing Blocks
Strings, Real and Ideal
Pulleys
Using the Constrained-Motion Checklist
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter N7
Circularly Constrained Motion
N7.1
N7.2
N7.3
N7.4
N7.5
Chapter Overview
Uniform Circular Motion
Unit Vectors
Nonuniform Circular Motion
Banking
Examples
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter N8
Noninertial Frames
N8.1
N8.2
N8.3
N8.4
N8.5
N8.6
N8.7
Chapter Overview
Fictitious Forces
The Galilean Transformation
Inertial Reference Frames
Linearly Accelerating Frames
Circularly Accelerating Frames
Using Fictitious Forces
Freely Falling Frames and Gravity
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter N9
Projectile Motion
N9.1
N9.2
N9.3
N9.4
N9.5
Chapter Overview
Weight and Projectile Motion
Simple Projectile Motion
Some Basic Implications
A Projectile Motion Checklist
Drag and Terminal Speed
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
86 Chapter N10
86 Oscillatory Motion
86
88
90
92
94
95
98
99
101
N10.1
N10.2
N10.3
N10.4
N10.5
N10.6
Chapter Overview
Mass on a Spring
Solving the Equation of Motion
The Oscillator as a Model
A Mass Hanging from a Spring
An Analogy to Circular Motion
The Simple Pendulum
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
102
102 Chapter N11
Kepler’s Laws
102
104
105
107
109
111
116
117
119
N11.1
N11.2
N11.3
N11.4
N11.5
N11.6
N11.7
120
120
120
122
122
126
127
129
130
132
134
135
137
Chapter Overview
Kepler’s Laws
Orbits Around a Massive Primary
Kepler’s Second Law
Circular Orbits and Kepler’s Third Law
Circular Orbit Problems
Black Holes and Dark Matter
Kepler’s First Law and Conic Sections
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
Chapter N12
Orbits and Conservation Laws
N12.1
N12.2
N12.3
N12.4
Chapter Overview
Overview and Review
Conservation Laws and Elliptical Orbits
Conservation Laws and Hyperbolic Orbits
Solving Orbit Problems
TWO-MINUTE PROBLEMS
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
138 Appendix NA
138 Differential Calculus
138
140
141
142
144
147
149
150
153
NA.1
NA.2
NA.3
NA.4
NA.5
Derivatives
Some Useful Rules
Derivatives and Slopes
The Chain Rule
Derivatives of Other Functions
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
154
154
154
156
157
160
160
162
164
166
167
169
170
170
170
172
173
174
176
178
180
181
185
185
187
188
188
188
190
190
192
193
197
197
199
200
200
200
201
202
202
204
205
205
Table of Contents
Appendix NB
Integral Calculus
NB.1
NB.2
NB.3
NB.4
NB.5
NB.6
Antiderivatives
Definite Integrals
The Fundamental Theorem
Indefinite Integrals
Substitution of Variables
Looking Up Integrals
HOMEWORK PROBLEMS
ANSWERS TO EXERCISES
vii
206
206
206
206
207
208
208
210
210
210
Index
211
Periodic table
223
Short Answers to Selected Problems
224
About the Author
Thomas A. Moore graduated from Carleton College
(magna cum laude with Distinction in Physics) in 1976.
He won a Danforth Fellowship that year that supported his graduate education at Yale University, where he
earned a Ph.D. in 1981. He taught at Carleton College
and Luther College before taking his current position at
Pomona College in 1987, where he won a Wig Award for
Distinguished Teaching in 1991. He served as an active
member of the steering committee for the national Introductory University Physics Project (IUPP) from 1987
through 1995. This textbook grew out of a model curriculum that he developed for that project in 1989, which
was one of only four selected for further development
and testing by IUPP.
He has published a number of articles about astrophysical sources of gravitational waves, detection of
gravitational waves, and new approaches to teaching
physics, as well as a book on general relativity entitled
A General Relativity Workbook (University Science Books,
2013). He has also served as a reviewer and as an associate editor for A
­ merican
Journal of Physics. He currently lives in Claremont, California, with his wife
Joyce, a retired pastor. When he is not teaching, doing research, or writing,
he enjoys reading, hiking, calling contradances, and playing Irish traditional
fiddle music.
ix
Preface
Introduction
This volume is one of six that together comprise the text materials for Six
Ideas That Shaped Physics, a unique approach to the two- or three-semester
calculus-based introductory physics course. I have designed this curriculum
(for which these volumes only serve as the text component) to support an
introductory course that combines two elements that rarely appear together:
(1) a thoroughly 21st-century perspective on physics (including a great deal
of 20th-century physics), and (2) strong support for a student-centered classroom that emphasizes active learning both in and outside of class, even in
situations where large-enrollment sections are unavoidable.
This course is based on the premises that innovative metaphors for
teaching basic concepts, explicitly instructing students in the processes of
constructing physical models, and active learning can help students learn the
subject much more effectively. In the course of executing this project, I have
completely rethought (from scratch) the presentation of every topic, taking
advantage of research into physics education wherever possible. I have done
nothing in this text just because “that is the way it has always been done.”
Moreover, because physics education research has consistently underlined
the importance of active learning, I have sought to provide tools for professors (both in the text and online) to make creating a coherent and self-­
consistent course structure based on a student-centered classroom as easy
and practical as possible. All of the materials have been tested, evaluated,
and rewritten multiple times. The result is the culmination of more than
25 years of continual testing and revision.
I have not sought to “dumb down” the course to make it more accessible.
Rather, my goal has been to help students become smarter. I have intentionally set higher-than-usual standards for sophistication in physical thinking,
but I have also deployed a wide range of tools and structures that help even
average students reach this standard. I don’t believe that the mathematical level required by these books is significantly different than that in most
university physics texts, but I do ask students to step beyond rote thinking patterns to develop flexible, powerful, conceptual reasoning and modelbuilding skills. My experience and that of other users is that normal students
in a wide range of institutional settings can (with appropriate support and
practice) meet these standards.
Each of six volumes in the text portion of this course is focused on a
single core concept that has been crucial in making physics what it is today.
The six volumes and their corresponding ideas are as follows:
Unit C:
Unit N:
Unit R:
Unit E:
Unit Q:
Unit T:
Conservation laws constrain interactions
The laws of physics are universal (Newtonian mechanics)
The laws of physics are frame-independent (Relativity)
Electric and Magnetic Fields are Unified
Particles behave like waves (Quantum physics)
Some processes are irreversible (Thermal physics)
xi
xii
Preface
I have listed the units in the order that I recommend they be taught, but I have
also constructed units R, E, Q, and T to be sufficiently independent so they
can be taught in any order after units C and N. (This is why the units are
lettered as opposed to numbered.) There are six units (as opposed to five
or seven) to make it possible to easily divide the course into two semesters,
three quarters, or three semesters. This unit organization therefore not only
makes it possible to dole out the text in small, easily-handled pieces and
provide a great deal of flexibility in fitting the course to a given schedule,
but also carries its own important pedagogical message: Physics is organized
hierarchically, structured around only a handful of core ideas and metaphors.
Another unusual feature of all of the texts is that they have been designed so that each chapter corresponds to what one might handle in a single
50-­minute class session at the maximum possible pace (as guided by years of
experience). Therefore, while one might design a syllabus that goes at a slower
rate, one should not try to go through more than one chapter per 50-minute
session (or three chapters in two 70-minute sessions). A few units provide
more chapters than you may have time to cover. The preface to such units
will tell you what might be cut.
Finally, let me emphasize again that the text materials are just one part of
the comprehensive Six Ideas curriculum. On the Six Ideas website, at
𝚠𝚠𝚠𝚙𝚑𝚢𝚜𝚒𝚌𝚜𝚙𝚘𝚖𝚘𝚗𝚊𝚎𝚍𝚞/𝚜𝚒𝚡𝚒𝚍𝚎𝚊𝚜/
you will find a wealth of supporting resources. The most important of these
is a detailed instructor’s manual that provides guidance (based on Six Ideas
users’ experiences over more than two decades) about how to construct a
course at your institution that most effectively teaches students physics. This
manual does not provide a one-size-fits-all course plan, but rather exposes the important issues and raises the questions that a professor needs to
consider in creating an effective Six Ideas course at their particular institution. The site also provides software that allows professors to post selected
problem solutions online where their students alone can see them and for a
time period that they choose. A number of other computer applets provide
experiences that support student learning in important ways. You will also
find there example lesson plans, class videos, information about the course
philosophy, evidence for its success, and many other resources.
There is a preface for students appearing just before the first chapter of
each unit that explains some important features of the text and assumptions
behind the course. I recommend that everyone read it.
Comments About the Current Edition
My general goals for the current edition have been to correct errors, enhance
the layout, improve the presentation in many areas, make the book more flexible, and improve the quality and range of the homework problems, as well as
significantly increase their number. Users of previous editions will note that
I have split the old “Synthetic” homework problem category into “Modeling”
and “Derivations” categories. “Modeling” problems now more s­ pecifically
focus on the process of building physical models, ­
making appropriate
­
approximations, and binding together disparate formulas. ­
“Derivation”
problems focus more on supporting or extending derivations presented in
the text. I thought it valuable to more clearly separate these ­categories.
The “Basic Skills” category now includes a number of multipart problems specifically designed for use in the classroom to help students practice
basic issues. The instructor’s manual discusses how to use such problems.
Preface
xiii
I have also been more careful to give instructors more choice about what
to cover, making it possible for them to omit chapters without a loss of continuity. See the unit-specific part of this Preface for more details.
Users of previous editions will also note that I have dropped the menulike chapter location diagrams, as well as the glossaries and symbol lists that
appeared at the end of each volume. I could find no evidence that these were
actually helpful to students. Units C and N still instruct students very carefully on how to construct problem solutions that involve translating, modeling, solving, and checking, but examples and problem solutions for the
remaining units have been written in a more flexible format that includes
these elements implicitly but not so rigidly and explicitly. Students are rather
guided in Unit N to start recognizing these elements in more generally formatted solutions, something that I think is an important skill.
The only general notation change is that now I use │v
W│ exclusively and
universally for the magnitude of a vector v
W. I still think it is very important
to have notation that clearly distinguishes vector magnitudes from other scaW) notation is too cumbersome to use exclusively, and
lars, but the old mag( v
mixing it with using just the simple letter has proved confusing. Unit C contains some specific instruction about the commonly used notation in texts by
other authors (as well as discussing its problems).
Finally, at the request of many students, I now include short answers to
selected homework problems at the end of each unit. This will make students
happier without (I think) significantly impinging on professors’ freedom.
Specific Comments About Unit N
This particular unit is primarily focused on Newton’s second law and its application to both terrestrial and celestial physics. Its goal is to help students
appreciate the power and breadth of the Newtonian perspective, as well as
the historical importance of Newton’s work.
This unit is structured on the premise that students have already studied
unit C, and indeed it draws on ideas from almost all the chapters of that unit.
It in turn is needed as basic background for all the other units in the course.
This unit is designed to teach Newtonian mechanics by using a “­spiral
learning” approach. The first three chapters provide a mostly qualitative intro­
duction to the concepts and techniques of Newtonian mechanics, while the
remaining chapters explore quantitative applications of these ideas in depth.
­Instructors can help students get the most out of this approach by ­helping
them see the connections between the earlier and later spirals through the
given material.
An unusual feature of the first part of this text is the exploration of
­motion using motion maps and trajectory diagrams. Both of these tools are
designed to deepen students’ intuitive understanding of motion, and trajectory diagrams in particular are a powerful tool for qualitatively predicting an object’s motion in advance of using mathematics. If students spend
enough time practicing the use of both of these tools, their understanding of
­Newtonian mechanics will become much deeper and more flexible.
I have also discussed the trajectory diagram in such depth because it
provides an excellent conceptual basis for computer programs that calculate trajectories. The Newton application, which one can access through the
URL 𝚠𝚠𝚠𝚙𝚑𝚢𝚜𝚊𝚙𝚙𝚜𝚙𝚘𝚖𝚘𝚗𝚊𝚎𝚍𝚞, does exactly this. This program makes it possible to explore a number of realistic applications of Newton’s second law
that would otherwise be inaccessible, and greatly simplifies the presentation of planetary motion in chapters N11 and N12. I strongly recommend
xiv
Preface
i­ nstructors use this program consistently starting in chapter N3, so that your
students get used to what the program does and how it operates before getting to chapter N11.
I did not modify this unit much for the current edition (I think only
unit R was edited less). However, users of the second edition will still note
some changes. Chapters N1 through N3 in the second edition have been
­streamlined into two chapters (N1 and N2) in the current edition, reducing
the unit’s overall length by one chapter. Also the material on planetary o
­ rbits
(now in chapters N11 and N12) has been reorganized in such a way that
chapter N11 becomes the unit’s capstone chapter, while chapter N12 (now
more tightly focused on applying the conservation laws to orbital motion) has
become optional in a way it was not before. Along the way, I have r­ eworked
the material on conic sections to make it much more accessible.
I have also modified the presentation of trajectory diagrams in such a
way as to avoid the odd business of having t = 0 be halfway through the first
step, something that proved perennially confusing to students. Now (much
more sensibly) t = 0 corresponds to the diagram’s initial position, and I have
tweaked the construction of the first step to take account of the fact that we
are also specifying the initial velocity at this time. I think students will find
this more intuitive.
As in unit C, I have adjusted the instruction in expert-like problem-­
solving styles to be more realistic and flexible in my expectations for ­students.
In this unit, I have also tried deliberately to wean students from the kind
of detailed commentary on problem-solving strategies provided in unit C,
­instead encouraging them to spot the features of a good solution themselves.
I encourage instructors to support this process in the classroom by assigning
activities where students do this.
I have also added some new problems, particularly problems that have
students produce symbolic results instead of numerical results. Otherwise,
I have mostly tried to correct errors and improve the wording.
Chapter C7 on angular momentum is optional from the point of view of
the other units, but is useful for chapters N4, N11, and N12 in this unit (because
C7 introduces the cross-product expressions for torque and for the angular momentum of a particle). I have tried to write these chapters so that one can get by
without chapter C7, but I would recommend spending some time in the class
sessions for chapters N4 and N11 justifying the plausibility of these expressions.
If one must make cuts, I’d drop chapter N12, and then maybe the part of
chapter N4 on torques. Dropping anything else involves cutting material that
is important in later units, even if it is not crucial for this unit. If one does not
use unit Q or unit T, one might also cut chapter N10 (on the harmonic oscillator): this material is not really needed in units E or R.
Appreciation
A project of this magnitude cannot be accomplished alone. A list including
everyone who has offered important and greatly appreciated help with this
project over the past 25 years would be much too long (and such lists appear
in the previous editions), so here I will focus for the most part on people
who have helped me with this particular edition. First, I would like to thank
Tom Bernatowicz and his colleagues at Washington University (particularly
Marty Israel and Mairin Hynes) who hosted me for a visit to Washingtion
University where we discussed this edition in detail. Many of my decisions
about what was most important in this edition grew out of that visit. Bruce
Sherwood and Ruth Chabay always have good ideas to share, and I appreciate their generosity and wisdom. Benjamin Brown and his colleagues at
Preface
xv
Marquette University have offered some great suggestions as well, and have
been working hard on the important task of adapting some Six Ideas problems for computer grading.
I’d like to thank Michael Lange at McGraw-Hill for having faith in the
Six Ideas project and starting the push for this edition, and Thomas Scaife for
continuing that push. Eve Lipton and Jolynn Kilburg have been superb at
guiding the project at the detail level. Many others at McGraw-Hill, including
Melissa Leick, Ramya Thirumavalavan, Kala Ramachandran, David ­Tietz,
and Deanna Dausener, were instrumental in proofreading and producing
the printed text. I’d also like to thank my students in Physics 71 at Pomona
­College (especially Gail Gallaher, Marija Dacic, Eric Li, and Jonah Grubb), Loredana Vetere, and Lowell Hazelton, for helping me track down errors in the
manuscript and offering useful feedback. Finally a very special thanks to my
wife Joyce, who sacrificed and supported me and loved me during this long
and demanding project. Heartfelt thanks to all!
Thomas A. Moore
Claremont, California
SmartBook is the first and only adaptive reading experience designed to
change the way students read and learn. It creates a personalized reading
experience by highlighting the most impactful concepts a student needs to
learn at that moment in time. As a student engages with SmartBook, the reading experience continuously adapts by highlighting content based on what
the student knows and doesn’t know. This ensures that the focus is on the
content he or she needs to learn, while simultaneously promoting long-term
retention of material. Use SmartBook’s real-time reports to quickly identify
the concepts that require more attention from individual s­ tudents–or the
entire class. The end result? Students are more engaged with course content,
can better prioritize their time, and come to class ready to ­participate.
Learn Without Limits
Continually evolving, McGraw-Hill Connect® has been redesigned to provide the only true adaptive learning experience delivered within a simple
and easy-to-navigate environment, placing students at the very center.
•
•
•
Performance Analytics – Now available for both instructors and students, easy-to-decipher data illuminates course performance. Students
always know how they’re doing in class, while instructors can view student and section performance at-a-glance.
Mobile – Available on tablets, students can now access assignments,
quizzes, and results on-the-go, while instructors can assess student and
section performance anytime, anywhere.
Personalized Learning – Squeezing the most out of study time, the adaptive engine in Connect creates a highly personalized learning path for
each student by identifying areas of weakness, and surfacing learning
resources to assist in the moment of need. This seamless integration of
reading, practice, and assessment, ensures that the focus is on the most
important content for that individual student at that specific time, while
promoting long-term retention of the material.
Introduction for Students
Introduction
Welcome to Six Ideas That Shaped Physics! This text has a number of features
that may be different from science texts you may have encountered previously. This section describes those features and how to use them effectively.
Why Is This Text Different?
Why active learning is crucial
Research into physics education consistently shows that people learn physics
most effectively through activities where they practice applying physical reasoning and model-building skills in realistic situations. This is because physics is not a body of facts to absorb, but rather a set of thinking skills acquired
through practice. You cannot learn such skills by listening to factual lectures
any more than you can learn to play the piano by listening to concerts!
This text, therefore, has been designed to support active learning both inside and outside the classroom. It does this by providing (1) resources for
various kinds of learning activities, (2) features that encourage active reading,
and (3) features that make it as easy as possible to use the text (as opposed
to lectures) as the primary source of information, so that you can spend class
time doing activities that will actually help you learn.
The Text as Primary Source
Features that help you use the
text as the primary source of
information
What is active reading?
To serve the last goal, I have adopted a conversational style that I hope you
will find easy to read, and have tried to be concise without being too terse.
Certain text features help you keep track of the big picture. One of the
key aspects of physics is that the concepts are organized hierarchically: some
are more fundamental than others. This text is organized into six units, each
of which explores the implications of a single deep idea that has shaped
physics. Each unit’s front cover states this core idea as part of the unit’s title.
A two-page chapter overview provides a compact summary of that
chapter’s contents to give you the big picture before you get into the details
and later when you review. Sidebars in the margins help clarify the purpose
of sections of the main text at the subpage level and can help you quickly
locate items later. I have highlighted technical terms in bold type (like this)
when they first appear: their definitions usually appear nearby.
A physics formula consists of both a mathematical equation and a conceptual frame that gives the equation physical meaning. The most important
formulas in this book (typically, those that might be relevant outside the current chapter) appear in formula boxes, which state the equation, its purpose
(which describes the formula’s meaning), a description of any limitations on
the formula’s applicability, and (optionally) some other u
­ seful notes. Treat
everything in a box as a unit to be remembered and used together.
Active Reading
Just as passively listening to a lecture does not help you really learn what
you need to know about physics, you will not learn what you need by simply
xvi
scanning your eyes over the page. Active reading is a crucial study skill for
all kinds of technical literature. An active reader stops to pose internal questions such as these: Does this make sense? Is this consistent with my experience? Do I see how I might be able to use this idea? This text provides two
important tools to make this process easier.
Use the wide margins to (1) record questions that arise as you read (so you
can be sure to get them answered) and the answers you eventually receive,
(2) flag important passages, (3) fill in missing mathematical steps, and
(4) record insights. Writing in the margins will help keep you actively
­engaged as you read and supplement the sidebars when you review.
Each chapter contains three or four in-text exercises, which prompt you
to develop the habit of thinking as you read (and also give you a break!).
These exercises sometimes prompt you to fill in a crucial mathematical detail
but often test whether you can apply what you are reading to realistic situations. When you encounter such an exercise, stop and try to work it out.
When you are done (or after about 5 minutes or so), look at the answers at
the end of the chapter for some immediate feedback. Doing these exercises is
one of the more important things you can do to become an active reader.
SmartBook (TM) further supports active reading by continuously measuring what a student knows and presenting questions to help keep students
engaged while acquiring new knowledge and reinforcing prior learning.
Features that support developing the habit of active reading
Class Activities and Homework
This book’s entire purpose is to give you the background you need to do the
kinds of practice activities (both in class and as homework) that you need
to genuinely learn the material. It is therefore ESSENTIAL that you read every
assignment BEFORE you come to class. This is crucial in a course based on this
text (and probably more so than in previous science classes you have taken).
The homework problems at the end of each chapter provide for different kinds of practice experiences. Two-minute problems are short conceptual problems that provide practice in extracting the implications of what you
have read. Basic Skills problems offer practice in straightforward appli­
cations of important formulas. Both can serve as the basis for classroom
activities: the letters on the book’s back cover help you communicate the
answer to a two-minute problem to your professor (simply point to the letter!). ­Modeling problems give you practice in constructing coherent mental
models of physical situations, and usually require combining several formulas to get an answer. Derivation problems give you practice in mathematically extracting useful consequences of formulas. Rich-context problems
are like modeling problems, but with elements that make them more like
realistic questions that you might actually encounter in life or work. They
are especially suitable for collaborative work. Advanced problems challenge advanced students with questions that involve more subtle reasoning
and/or difficult math.
Note that this text contains perhaps fewer examples than you would
like. This is because the goal is to teach you to flexibly reason from basic principles, not slavishly copy examples. You may find this hard at first, but real
life does not present its puzzles neatly wrapped up as textbook examples.
With practice, you will find your power to deal successfully with realistic,
practical problems will grow until you yourself are astonished at how what
had seemed impossible is now easy. But it does take practice, so work hard and
be hopeful!
Read the text BEFORE class!
Types of practice activities
­provided in the text
xvii
N1
Newton’s Laws
Chapter Overview
Section N1.1: The Newtonian Synthesis
This section reviews the history of physics before Newton to underline the astonishing nature of Newton’s achievement. Aristotle, whose work provided the background
for Western thinking about motion until the 1500s, thought that when undisturbed,
objects moved in ways consistent with their natures. In this view, terrestrial and celestial objects had different natures and thus obeyed different laws. But Newton, b
­ uilding
on theoretical work by Copernicus, Galileo, and Descartes, and observational work by
Kepler, was able to show that a theoretical model based on three simple laws of motion
and a law of gravitation could explain both terrestrial motion and celestial motion
more simply and accurately than any model previously proposed. This ­Newtonian
synthesis, demonstrating that the laws of physics are universal, had an enormous impact
on Western thought and led to the birth of physics as a science.
Section N1.2: Newton’s Laws of Motion
Newton’s three laws of motion state that
1. In the absence of external interactions, an object’s (or system’s) center of mass
moves at a constant velocity.
2. The net external force on a system causes that system’s center of mass to accelerate at a rate inversely proportional to the system’s total mass.
3. The force that a given interaction A between objects 1 and 2 exerts on object 1 is
equal in magnitude and opposite in direction to the force it exerts on object 2.
The section shows how these follow from the momentum transfer model of unit C.
Currently, physicists consider Newton’s first law to be a law that distinguishes
inertial from noninertial reference frames (see sections C4.4 and C4.5), but Newton
wanted to make it clear that in his model the natural state of motion of objects (both
celestial and terrestrial) is motion in a straight line at a constant velocity.
In mathematical form, Newton’s second law says that
Wext = M aW CM(N1.4)
∑ F
• Purpose: This equation links the acceleration a
W CM of a system’s center of mass
Wext of external forces acting on it.
to the system’s mass M and the vector sum ∑ F
• Limitations: The system must have a fixed mass and a speed that is small compared to that of light (as we will see in unit R).
• Note: Read this equation verbally as follows: “the net external force on an
object causes its mass to accelerate.”
We will spend the rest of the unit exploring applications of this law.
Newton’s third law follows directly from the momentum transfer model, but
sometimes leads to counterintuitive results. However, note that the effects of even
equal forces exerted on different objects may not be the same!
2
Section N1.3: Vector Calculus
As Newton himself found, we can’t apply Newton’s model without vector calculus.
In analogy to the definition of the time derivative of a function, we define the time
W to be d q W / dt ≡
W(t + ∆t) - q
W (t)] /∆t }.
derivative of a vector quantity q
lim { [ q
∆t W0
Section N1.4: The Formal Definition of Velocity
dx
x (t + ∆t) - x (t)
___
______________
lim
∆t dt
∆t
W0
dy
(t
+
∆t)
y
(t)
y
W
W ≡ ___
(N1.11)
v
d r ≡
≡ ___
lim ______________
∆t dt
dt
∆t
W0
z______________
(t + ∆t) - z (t)
dz
___
lim
∆t
∆t dt
W0
[
][ ]
W (t) at an instant t,
• Purpose: This equation formally defines an object’s velocity v
where r W (t) = [x (t), y (t), z (t)] is the position of the object’s center of mass at
time t, and rW (t + ∆t) = [x (t + ∆t), y (t + ∆t), z (t + ∆t)] is the same evaluated at
time t + ∆t, where ∆t is some finite interval of time. The symbols d r W/dt, dx/dt,
dy/dt, and dz/dt now officially represent time derivatives.
• Limitations: This expression is a definition and so has no limitations.
An object’s average velocity
v W ≡ ∆rW /∆t during a finite time interval ∆t is a good
W halfway through the interval.
approximation to the object’s instantaneous velocity v
Section N1.5: The Formal Definition of Acceleration
vx (t + ∆t) - vx (t)
dv
___
_______________
x
lim
∆t 0
∆t
dt
W
dv
(t
+
∆t)
v
(t)
v
y
y
y
W ≡
_______________
(N1.13)
a
W (t) ≡ ___
dv
≡ ___
lim
∆t 0
∆t
dt
dt
W
dv
v (t + ∆t) - vz (t)
___
_______________
z
z
lim
∆t
0
∆t
dt
W
[
][ ]
• Purpose: This equation defines the acceleration aW(t) of an object’s center of
W (t), with components vx(t), vy(t), and vz(t), is
mass at an instant of time t, where v
W (t + ∆t) (and analogously
the vel­ocity of the object’s center of mass at time t; v
for its components) is the same evaluated at time t + ∆t, where ∆t is some finite
W/dt and components dvx/dt, dvy/dt, and dvz/dt
interval of time. The quantity d v
represent formal time derivatives of the corresponding functions.
• Limitations: This is a definition, so it has no limitations.
W/∆t during a finite time interval ∆t is a
Again, an object’s average acceleration a W ≡ ∆v
good approximation of its instantaneous acceleration a
W halfway through the interval.
Section N1.6: Uniform Circular Motion
In this section, we use the definition of acceleration to argue that
W = │v
a
W│2/r toward the circle’s center
(N1.17)
W of an object
• Purpose: This equation specifies the instantaneous acceleration a
in uniform circular motion at speed │v
W│ in a circle of radius r.
• Limitations: To be uniform circular motion, │v
W│ must be constant. This expression does not apply to nonuniform circular motion.
3
4
Chapter N1
N1.1
In this unit, our focus shifts
to the behavior of individual
objects
Aristotelian physics
The Copernican model of the
solar system
Newton’s Laws
The Newtonian Synthesis
In unit C, we studied how three great conservation laws constrain the behavior of isolated systems of objects in spite of the detailed characteristics of their
interactions. In this unit, we will narrow our focus from systems to single
objects: how do interactions affect the motion of an individual object?
This chapter describes the basic tools (Newton’s three laws of motion
and the definitions of velocity and acceleration) that we need to answer this
question, connecting them to what we have already learned in unit C. The
next two chapters will provide an overview of how we can apply these tools.
But before we dig into the details, I’d like to briefly review the history of
humanity’s work on this topic to underline Newton’s intellectual impact.
As mentioned in unit C, the Greek philosopher Aristotle (384–322 B.C.E.)
was one of the first people to think about the laws of motion systematically.
­Aristote’s primary goal in his treatises Physica (“Physics”) and De Caelo (“On
the Heavens”) was to understand motion in the context of a general philosophy of change and its relation to an object’s nature. His model of change
was actually more biological than what we would consider mechanical. Just
as it is in an acorn’s intrinsic nature to grow into an oak, Aristotle argued
that objects move in ways that reflect their intrinsic natures. Heavy objects
have a natural tendency to move toward the universe’s center (the earth) and
remain at rest there. Fire, by its nature, yearns to move away from the earth
toward the heavens, where fiery objects naturally reside. Celestial bodies,
because of their natures, move endlessly in the heavens in perfect circles.
Since a heavy object’s nature is to be at rest, any motion requires a special cause, and the object comes back to rest after the cause ceases. Celestial
objects, in contrast, naturally move in endless perfect circles. Note that different laws of motion apply to terrestrial and celestial objects in this model, because
the natures of celestial and terrestrial objects are fundamentally different.
Though Aristotle’s ingenious and careful work provided the starting point
for Western thinking about motion until the 1500s, scholars did not unquestioningly accept it. People quickly saw that his simple picture of celestial
objects moving in simple circles was inadequate. In 140 C.E., the ­Alexandrian
astronomer Ptolemy published a much more sophisticated geocentric model
of celestial motion that involved nested circular motions. Ptolemy’s book
was so comprehensive and well-written that it became the accepted text on
astronomy until the 1600s (9th-century Arab astronomers referred to it as
the Almagest, “The Greatest”). Medieval Western thinkers also noted problems with Aristotle’s models of motion for terrestrial objects and proposed
improvements. But these were incremental adjustments to a model that still
treated celestial and terrestrial physics as being fundamentally different.
The Aristotelian consensus began to unravel in the mid-1500s, when the
Polish scholar Nicolaus Copernicus proposed a model that put the sun, not
the earth, at the universe’s center. Copernicus hoped that this model could
explain the observed behavior of the planets in terms of simple circular orbits
instead of requiring the complex nesting of circular motions of ­Ptolemy’s
model. While his hope was ultimately in vain, astronomers found his model
so handy for doing calculations that his book was widely circulated even as
opposition mounted. Opposing scholars correctly recognized that Copernicus’s model contradicted not only Ptolemy’s great work but also the foundation of Aristotle’s ideas of motion, since his idea of “natural” motion toward
the earth or toward the heavens rested firmly on the assumption that the
earth was the universe’s fixed center. They were unwilling to overturn a
2000-year-old consensus just to make a few astronomical calculations ­simpler,
­particularly as no replacement for Aristotle’s scheme was available.
N1.1 The Newtonian Synthesis
However, the Italian physicist Galileo Galilei was convinced that
­ opernicus was right. In the late 1500s and early 1600s, he took the first
C
steps toward an understanding of motion that would be consistent with this
model, developing nascent forms of Newton’s first law and the theory of
relativity to ingeniously rebut Ptolemy’s arguments that the earth must be at
rest. Galileo also was on the leading edge of two hot trends in the “natural
philosophy” of his time: (1) the desire to make science quantitatively predictive
as well as merely descriptive and (2) using experiments to test hypotheses
instead of relying on pure reason. These values led Galileo to do experiments
that provided the first quantitative description of the motion of falling objects.
Several other crucial developments laid the foundation for Newton’s
work. In 1609, Johannes Kepler showed (to his surprise and some shock) that
Copernicus’s model was quantitatively consistent with observations only if
the planets move in ellipses instead of perfect circles. By 1618, Kepler published three empirical laws that provided a complete description of planetary motion in Copernicus’s model, finally making that model both simpler
and more accurate than Ptolemy’s. About the same time, observation of
variation in the size and phases of Venus using the newly invented telescope
enabled Galileo and others to argue convincingly that Venus (at least) must
orbit the sun. Finally, the philosopher René Descartes began in the mid-1600s
to express the radical idea that it should be possible to explain all phenomena
in terms of moving and colliding particles. The stage was set for revolution.
In 1661, the 19-year-old Isaac Newton arrived in Cambridge to begin his
college education. Newton learned Aristotle in class, but the ideas of Galileo
and Descartes circulated unofficially. In 1665, the university closed because
of the Black Plague, and Newton spent the next two years at his rural home.
During this time, he invented vector calculus and applied it to the motion
of the moon and planets. Starting with the idea that all objects (including
planets) naturally move with constant velocities, Newton showed that the
planets behaved as if they were attracted to the sun by a force that varied as
the inverse square of their distance from the sun, a force that Newton saw as
being the same as the gravitational force that causes an apple to drop from a
tree. In spite of these successes, Newton did not publish anything at the time.
In 1679, after he had returned to Cambridge as a professor, disputes with
his rival Robert Hooke goaded Newton to publish his work. In 1687, ­Newton
published Philosophiae Naturalis Principia Mathematica (“­Mathematical Principles of Natural Philosophy”: see figure N1.1), which used his techniques
of calculus, three simple laws of motion, and his law of inverse-square gravitation to explain all of Kepler’s empirical laws of planetary motion as well
as a variety of terrestrial phenomena, including the moon’s influence on the
tides and Galileo’s empirical work on falling bodies. This was one of the most
important books in the history of science. Newton’s theory was the first to
­explain both terrestrial and celestial motion using the same theoret­ical framework. This unification, which we call the Newtonian synthesis, stands as one
of the greatest intellectual achievements of all time. Indeed, the Principia was
so impressive that most physicists at the time dropped what they were doing
and began to explore the rich implications of his new theory. The Principia
forged from a diversity of competing schools and perspectives a single community of scholars dedicated to one overarching theory, transforming physics
from a branch of natural philosophy into a quantitative science.
This unit is devoted to exploring the application of Newton’s laws (particularly his second law) to a variety of terrestrial and celestial phenomena.
Our journey will culminate in chapters N11 and N12 with a demonstration
that these laws indeed explain Kepler’s empirical laws of planetary motion,
allowing us to experience Newton’s crowning achievement for ourselves!
5
Galileo and Kepler lay the
foundations for Newton
Figure N1.1
Title page of the first edition
of Newton’s Principia. (Credit:
© ­History Archives/Alamy)
Newton invents a model that
explains both terrestrial and
celestial physics
6
Chapter N1
N1.2
Newton’s three laws of motion
Newton’s Laws
Newton’s Laws of Motion
In modern language, we can state Newton’s laws of motion as follows:
1. In the absence of external interactions, an object’s (or system’s) center of
mass moves at a constant velocity.
2. The net external force on a system causes that system’s center of mass
to accelerate at a rate inversely proportional to the system’s total mass.
3. The force that a given interaction A between objects 1 and 2 exerts on 1 is
equal in magnitude and opposite in direction to the force it exerts on 2.
The derivation of
Newton’s first law
We currently understand these laws to express implications of the principle
of momentum transfer (or equivalently, the law of conservation of momentum). Let’s see how this works for each law in turn.
In chapter C4, we saw that the total momentum of any system of particles is equal to the system’s total mass times the velocity of its center of mass:
WCM = p
W 1 + ⋯ + p
W N ≡ p
W tot(N1.1)
M v
The derivation of
Newton’s second law
This equation tells us that we can calculate the total momentum of an
extended object (or even a system of objects!) by treating it as if it were a
point particle of equal total mass located at the center of mass. Now, conservation of momentum implies that the total momentum of an isolated system
is conserved. Since equation N1.1 implies that v
WCM = p
Wtot/M, and M and p
Wtot
have fixed values for an isolated object, we see that an isolated object’s
(center-of-mass) velocity must be constant. This is Newton’s first law for
extended objects.
Though this law is in some sense a corollary of his second law (as we
will see shortly), Newton had an important rhetorical reason for stating his
first law as he did: it clearly and vividly contradicts the previously accepted
Aristotelian assumptions about both terrestrial and celestial motion. Newton
wanted to make it clear that the natural state of a terrestrial object or a celestial object is not to be at rest as close to the center of the earth as possible or
unending motion in a circle, respectively, but rather unending motion in a
straight line. Given his context, making this point clearly was essential.
From a contemporary perspective, Newton’s first law not only states
a useful consequence of the law of conservation of momentum but also
plays an essential role in the definition of an inertial reference frame (see
chapter N8).
Let’s turn now to Newton’s second law. Recall that when external interW] A, [d p
W] B, … to that
actions A, B, … act on a system, they transfer impulses [d p
system during a given time interval dt. If A, B, … comprise the complete set of
external interactions acting on the system, conservation of momentum then
implies that the change in the system’s total momentum must be
Wtot
[d p W ] A + [d p W ] B + ⋯ = d p
(N1.2)
But, assuming that the system’s mass does not change during this time,
Wtot = M d v
WCM , where d v
WCM is the change in
then equation N1.1 implies that d p
the velocity of the system’s center of mass. If we substitute this into the above,
divide both sides by dt, and use the definition of force, we have
WCM
W] A _____
W] B
Wtot
d v
[d p
[d p
d p
_____
+
+ ⋯ ≡ F
WA + F
WB + ⋯ = ____
= M _____
dt
dt
dt
dt
(N1.3)
Wext . We also define the rate at which an
Let’s compactly write F
WA + F
WB + ⋯ ≡ ∑ F
WCM /dt ≡ aW CM . Substituting
object’s velocity changes to be its acceleration: d v
N1.2 Newton’s Laws of Motion
7
these quantities into equation N1.3 above yields the mathematical statement
of Newton’s second law:
Wext = M aW CM(N1.4)
∑ F
• Purpose: This equation links the acceleration aW CM of a system’s center
Wext of all
of mass to the system’s total mass M and the vector sum ∑ F
the external forces acting on it.
• Limitations: The system must have a fixed mass and a speed that is
small compared to that of light (as we will see in unit R).
• Note: Read this equation verbally as follows: “the net external force on
an object causes its mass to accelerate.”
Wext = 0, and equation N1.4 tells us that
(Note that if a system is isolated, ∑ F
the system’s velocity is constant, which is Newton’s first law.)
Newton’s second law contradicts common subconscious notions about
force and motion in important ways that are worth making explicit. First,
it asserts that forces cause acceleration. At the literal level, equation N1.4
expresses a quantitative equality between two sides of a mathematical equation. At the more important conceptual level, though, it expresses a causal
relationship. The net external force is not in any sense “equivalent” to a mass
accelerating (these are completely distinct ideas); rather, the net external
force on an object causes its center of mass to accelerate (see the final note).
Moreover (contrary to the Aristotelian model), forces do not cause
motion, they cause acceleration. Newton’s first and second laws address this
issue from two directions, the first law declaring that rectilinear motion is
natural and needs no explanatory cause and the second proclaiming that
forces cause an object’s motion to change away from its natural motion.
Finally, Newton’s second law tells us that it is the net force (the vector
sum of all external forces) on the object that causes this acceleration, not the
strongest force or the most recently applied force. A force does not overcome
another force to cause an object to move in a certain way: rather, all forces
acting on the object act in concert to direct the object’s acceleration.
Let’s turn now to Newton’s third law. Conservation of momentum
implies that if an interaction A acts between two objects 1 and 2, then any
impulse that the interaction transfers to object 1 must come out of object 2:
W1] A = -[d p
W2] A . If this is true, then the rates at which momentum flows
[d p
into each object due to that interaction must also be equal in magnitude and
opposite in direction. Applying the definition of force, we see that
(
Anti-Aristotelian aspects of
Newton’s second law
The derivation of
Newton’s third law
)
W1] A
W2] A
[d p
-[d p
W1, A ≡ ______
W2, A(N1.5)
F
= - _______
≡ -F
dt
dt
This is the mathematical statement of Newton’s third law.
While this seems logical and straightforward in the context of the
momentum transfer model, applying this law to realistic situations sometimes yields counterintuitive results. For example, suppose a 10,000-kg truck
traveling at 65 mi/h hits a parked 500-kg Volkswagen Beetle. Which vehicle
exerts the stronger force on the other during the collision? The third law says
that the forces that their contact interaction exerts on each vehicle must have
the same magnitude: any momentum that the interaction transfers out of the
truck must go into the Beetle at the same rate!
But this seems absurd! We know that this interaction will smash the
­Beetle flat and fling it some distance, while hardly fazing the truck. How can
the forces possibly be the same? The answer is that just because the forces are
the same doesn’t mean that the objects’ responses must be the same. As the
This law can seem
counterintuitive
8
Chapter N1
Newton’s Laws
Beetle is 20 times less massive than the truck, a given amount of momentum
flowing into the Beetle causes a change in its velocity that is 20 times larger
than the same flow changes the truck’s velocity. Forces of the same magnitude can therefore have entirely different effects!
As we have seen, we can derive all three laws from conservation of
momentum, which we now consider to be the more fundamental principle.
Newton, however, took these laws as the basic assumptions of his model,
and derived conservation of momentum from them! Newton’s approach is
not wrong. Every physical model is based on assumptions, and one can build
the same model from different sets of assumptions. The choice between such
logically equivalent approaches is really about what one wants to emphasize. (Physicist currently prefer to emphasize momentum.)
However we get to these laws, though, our goal in this unit is to see how
we can use them (particularly the second law) to solve problems that would
be harder to solve using an approach directly based on conservation laws.
N1.3
The time derivative of an
­ordinary mathematical
function
Vector Calculus
As Newton himself found, we cannot go very far toward this goal without
vector calculus. Newton’s second law intrinsically involves the rate at which
an object’s velocity changes, and calculus provides the appropriate mathematics for handling such rates. Moreover, since velocity is a vector, we need
to know how to apply calculus to vector quantities. (Happily, we don’t have
to invent vector calculus from scratch the way he did!)
Fortunately, the vector calculus we need is not very different from what
you learn in an ordinary calculus class. Let’s begin with a brief review. Consider an ordinary quantity f (t) that varies with time t. We define the time
­derivative df/dt of such a quantity at a given instant of time t as follows:
df
f (t + ∆t) - f (t)
__ ≡
lim ______________
(N1.6)
∆t
0
dt
∆t
W
The time derivative of a vector
In words, this says that we first compute the change ∆f = f (t + ∆t) - f (t) in
the quantity’s value during a time interval ∆t starting at time t, then calculate the value of the ratio ∆ f/∆t and take the limiting value of this ratio as ∆t
approaches zero. The derivatives of ordinary functions of a single variable
are typically described in an introductory calculus course. Appendix NA at
the end of this volume provides a more detailed review if you need it.
We can easily extend this to vector quantities. Let q
W be a vector quantity that varies with time t. In analogy to equation N1.6, we define the time
W/dt of q
derivative d q
W to be
W
d q
q
W(t + ∆t) - q
W(t)
______________
lim
(N1.7)
___ ≡
∆t
0
dt
∆t
W
W = q
In words, we first find the change ∆ q
W(t + ∆t) - q
W(t) in the vector q
W during
W/∆t (which is a
the time interval ∆t starting at time t, calculate the ratio ∆ q
vector), and finally determine this ratio’s limiting value as ∆t goes to zero.
The component definition of the vector difference implies that
[
W
d q
1
___
≡
lim ___
dt
∆t
W 0 ∆t
][
][ ]
dqx
qx (t + ∆t) - qx (t)
___
______________
lim
∆t
dt
∆t
W0
dq
q______________
y
y (t + ∆t) - qy (t)
qy (t + ∆t) - qy (t) =
lim
≡ ___ (N1.8)
∆t
dt
∆t
W0
dq
q______________
z
z (t + ∆t) - qz (t)
___
qz (t + ∆t) - qz (t)
lim
∆t
0
∆t
W
dt
qx (t + ∆t) - qx (t)
N1.4 The Formal Definition of Velocity
9
In words, this says that the components of the time derivative of the vector
W/dt are just the ordinary time derivatives of the components of q
d q
W treated
as ordinary functions. This means that we can easily apply what we know
about ordinary calculus to vector calculus.
N1.4
The Formal Definition of Velocity
W at a time t to be
In unit C, we defined an object’s velocity vector v
d rW sm all d ispl acement
W ≡ ___
v
≡ __________________
sho r t time inte r v al
dt
(N1.9)
The definition of velocity we
used in unit C
where d r W is the object’s displacement during the time interval dt, which in
turn (1) encloses the instant t in question and (2) is “sufficiently short” that
the velocity doesn’t change significantly during the interval.
This definition works intuitively and was adequate for our purposes in
unit C, but is really a bit fuzzy. What constitutes a “sufficiently short” dt is
poorly defined, partly because the criterion refers to the quantity (velocity)
we are trying to define! While we may intuitively know what this means, it
is not good enough to be used as a basis for a mathematically precise definition. Indeed, the lack of a precise definition of velocity at an instant was a
significant stumbling block for Western physicists until Newton.
The concept of the time derivative of position provides a natural way to put
the concept of velocity on a mathematically firm foundation. We define an
object’s ­instantaneous velocity vector at a given instant of time t to be
d rW
∆rW
r (t + ∆t) - r W (t)
W ≡ ___
v
≡
lim ___ ≡
lim ______________
∆t
dt ∆t
∆t
W 0 ∆t
W0
(N1.10)
where r W(t) is the object’s position vector as a function of time. This definition
is essentially the same as that given by equation N1.9 except that no finite
interval ∆t is considered “sufficiently short”: we define v
W by the limiting value
that ∆rW /∆t approaches as ∆t goes to zero. This definition thus ­entirely avoids
the problem of defining when an interval is “sufficiently short.” It also makes
it mathematically clear what we can possibly mean by an object’s velocity at
an instant, an idea that superficially seems to be incompatible with the definition of velocity as the object’s displacement during a (nonzero!) interval of time
divided by the duration of that interval.
According to equation N1.10, this definition implies that
x (t + ∆t) - x (t)
dx
___
lim _______________
∆t
dt
(t
+
∆t)
y
(t)
y
dy
W
W ≡ ___
v
d r ≡
≡ ___
lim _______________
(N1.11)
∆t dt
∆t
dt
W0
dz
z (t + ∆t) - z (t)
______________
___
lim
∆t
∆t dt
W0
W (t) at an
• Purpose: This equation formally defines an object’s velocity v
instant t, where r W (t) = [x (t), y (t), z (t)] is the position of the object’s center of mass at time t, and r W (t + ∆t) = [x (t + ∆t), y (t + ∆t), z (t + ∆t)] is
the same evaluated at time t + ∆t, where ∆t is some finite interval of
time. The symbols d r W/dt, dx/dt, dy/dt, and dz/dt now officially represent time derivatives.
• Limitations: This expression is a definition and so has no limitations.
[
∆t W0
][ ]
The formal definition of
instantaneous velocity
Chapter N1
10
Newton’s Laws
We will call the components vx ≡ dx/dt, vy ≡ dy/dt, and vz ≡ dz/dt the object’s
x-velocity, y-velocity, and z-velocity at time t, respectively. The object’s instantaneous speed at time t is
│v
W│≡
Example N1.1
___________
x
_________________
( ) ( ) ( )
2
dy 2 dz 2
___
dx + ___
+ ___
z =
v 2 + v 2 + v 2
y
dt
dt
(N1.12)
dt
Problem: Suppose the components of an object’s position as a function of
time are given by x(t) = at 2 + b, y (t) = ct and z (t) = 0, where a = 2.0 m/s2,
b = 5.2 m, and c = 1.6 m/s. What is the object’s speed at time t = 0?
Solution Taking the time derivative of each of these position components
(using the methods discussed in appendix NA), we find that the components of the object’s velocity (as functions of time) are vx (t) = dx/dt = 2at,
vy (t) = dy/dt = c, and vz (t) = dz/dt = 0. Evaluating these at time t = 0, we find
that vx (0) = 2 a·0 = 0, vy (0) = c, and vz (0) = 0. Therefore, the object’s speed
at time t = 0 is │v W(0)│= [ v2x + v2y + v2z ]1/2
= [0 + c 2 + 0]1/2 = c = 1.6 m/s.
Exercise N1X.1
Now you try. Suppose that the components of an object’s position vector as
functions of time are given by x(t) = at 2 + b, y(t) = –ct, and z(t) = –at 2 + ct,
where a = 1.5 m/s2, b = 3.0 m, and c = 4.0 m/s. Find the components of this
object’s velocity and its speed at t = 0 and t = 2.0 s.
As figure N1.2 illustrates, the ratio ∆ r W/∆t computed for any finite time interval ∆t starting at time t is only approximately equal to the object’s instantaW at time t (though the approximation gets better as ∆t gets
neous velocity v
smaller). We will call
v W ≡ ∆ r W/∆t the object’s average velocity during the time
interval ∆t, where the slash (symbolically evoking a “drawn out” interval)
distinguishes average velocity from the symbol v W , which from now on we
will use exclusively for instantaneous velocity. (A more common symbol for
average velocity is v
Wavg , but this symbol would be awkward in what follows.)
Direction of
motion at A
Direction of
motion at A
Object’s
trajectory
A
r(t + ∆t)
r(t)
(a)
Object’s
trajectory
∆r
∆r
A
Direction of
motion at A
Object’s
trajectory
A
r(t + ∆t)
r(t)
O
(b)
∆r
r(t)
O
(c)
r(t + ∆t)
O
Figure N1.2
The shorter the time interval ∆t, the closer that the direction of ∆r W/∆t (which is the same as that of r) becomes to
W at time t (which is the direction of the object’s motion as it passes point A).
the direction of the object’s velocity v
N1.5 The Formal Definition of Acceleration
11
Figure N1.3
Direction of v at the
middle of the interval
The direction of an object’s average velocity
v
W during an interval
∆t is generally closer to the direction of its instantaneous velocity
v
W at the middle rather than the
beginning of the interval.
(Remember that v = ∆r / ∆t has
the same direction as ∆r ).
Direction of v at
the beginning of
the interval
∆r
As figure N1.3 illustrates,
v W ≡ ∆r W/∆t for a nonzero ∆t generally most
closely approximates the object’s instantaneous velocity at an instant t that
is halfway through the interval ∆t (in both magnitude and direction, as it
turns out). This is important to know, because in physics we often have to
estimate instantaneous velocities by computing average velocities over small
but finite time intervals. This rule tells us how to do this most accurately. We
will find this quite useful in subsequent chapters.
Problem: The diagram below shows a top view of a ball rolling toward the
right along an inclined track, showing the ball’s position every 0.1 s. Is the
ball’s speed increasing, decreasing, or staying constant? Estimate the ball’s
speed at t = 0.3 s.
t=0
0
0.1 s
20
40
0.2 s
60
0.3 s
80
0.4 s
100
0.5 s
120
Example N1.2
0.7 s
140 cm
Solution Since the ball’s displacement during successive intervals gets smal­
ler, the ball is slowing down. Its speed at t = 0.3 s will be most closely approximated by the magnitude of ∆rW /∆t for the shortest interval having that
instant as its midpoint. Between t = 0.2 s and t = 0.4 s, the ball t­ ravels 45 cm,
so │v
W (0.3 s)│≈│∆ r W│/∆t during this interval ≈ (45 cm)/(0.2 s) = 225 cm/s.
The picture in example N1.2, which shows an object’s position at a
sequence of equally spaced intervals of time, is an example of what we call a
motion diagram. We’ll talk about these diagrams more in the next chapter.
N1.5
The Formal Definition of Acceleration
The word acceleration in everyday English carries a connotation of “speeding
up.” Its meaning in physics is both more general and more precise:
An object’s acceleration at an instant is the rate of change of its velocity,
a vector that expresses how rapi­dly and in what direction the object’s
velocity vector is changing at that ­instant.
In physics, then, we use acceleration to describe any change in the magnitude
and/or direction of an object’s velocity. A car that is speeding up is indeed
accelerating (because the magnitude of its velocity is increasing), but according to the physics definition of the word, a car that is slowing down is also
accelerating, because the magnitude of its velocity vector is changing (in this
The physics definition of
­acceleration in words
12
Chapter N1
Newton’s Laws
The mathematical definition of
the acceleration vector
case decreasing). Even a car moving at a constant speed can be accelerating
if it is going around a bend in the road (in this case, because the direction of
its velocity is changing). If an object’s velocity vector changes in any way, the
object is accelerating.
If an object’s instantaneous acceleration vector aW (t) at an instant of time
W/dt ≡
W(t + ∆t) - v
t is the rate of change of its velocity d v
lim { [v
W(t)]/∆t }, then
∆t
W0
[
][ ]
vx (t + ∆t) - vx (t)
dv
___
_______________
x
lim
∆t
0
∆t
dt
W
dv
(t
+
∆t)
v
(t)
v
y
y
y
___
_______________
W =
lim
aW (t) ≡ ___
d v
≡ dt (N1.13)
∆t
0
∆t
W
dt
dv
vz (t + ∆t) - vz (t)
___
_______________
z
lim
∆t
W0
∆t
dt
• Purpose: This equation defines the acceleration aW (t) of an object’s cenW (t), with components vx(t),
ter of mass at an instant of time t, where v
vy(t), and vz(t), is the vel­ocity of the object’s center of mass at time t;
W (t + ∆t) (and analogously for its components) is the same evaluated at
v
W/dt
time t + ∆t, where ∆t is some finite interval of time. The quantity d v
and components dvx/dt, dvy/dt, and dvz/dt represent formal time derivatives of the corresponding functions.
• Limitations: This is a definition, so it has no limitations.
The definition of the
average acceleration
In words, this equation says that an object’s acceleration at time t is the limitW in the object’s instantaneous velocing value as ∆t goes to 0 of the change ∆ v
ity between times t and t + ∆t, divided by the duration ∆t of that interval.
Since velocity is measured in meters per second (m/s), the SI units of acceleration are meters per second squared (m/s2).
We also see that if we know the components of an object’s velocity vector
as a function of time, we can compute the components of its acceleration simply by taking the time derivatives of the corresponding velocity components,
treating them as ordinary simple functions of t.
Just as an object’s average velocity
v W ≡ ∆rW /∆t for a given nonzero (but
fairly short) time interval ∆t best approximates that object’s instantaneous
velocity midway through the interval, so an object’s average acceleration
W/dt during a given nonzero (but reasonably short) interval ∆t best
a W ≡ ∆v
approximates its instantaneous acceleration midway through the interval:
W (t + ∆t) - v
W (t)
∆vW v
aW (t + _ 12 ∆t) ≈ a W ≡ ___
≡ ______________
(N1.14)
∆t
∆t
So if we know an object’s velocity at two instants of time, we can estimate that
object’s acceleration halfway through the interval by computing the differW between those velocities and dividing by ∆t. This approximation
ence ∆ v
improves as ∆t becomes smaller compared to the time required for the acceleration to change significantly. If the object’s acceleration is constant during
∆t, then the instantaneous acceleration throughout the interval is the same as
this average acceleration.
In situations where we need only to estimate an object’s acceleration,
equation N1.14 provides a quick way to connect an object’s acceleration to
the change in its velocity without doing any calculus.
The following examples illustrate the application of this idea in several
different contexts.
N1.6 Uniform Circular Motion
13
Problem: A person driving eastward on a straight road at 20 m/s (44 mi/h)
sees the brake lights of the car in front go on and so applies the brakes for 1.5 s.
This slows the 1000-kg car to 14 m/s. What was the magnitude and direction
of the average net external force acting on the car during this period?
W i = 20 m/s eastward; its final velocSolution The car’s initial velocity vector is v
W f = 14 m/s eastward. As the vector construction in ­figure N1.4
ity vector is v
W = 6.0 m/s westillustrates, this means that the car’s change in velocity is ∆v
W between the final and initial velocities
ward. (Remember that difference ∆v
is the vector we would have to add to the initial velocity to get the final
velocity.) Therefore, a W = (6.0 m/s west)/(1.5 s) = 4.0 m/s2 westward. By
Newton’s second law and since the car’s mass is m = 1000 kg, the average
net external force acting on the car must be m a W = (1000 kg)/(4.0 m/s2) =
4000 kg·m/s2 = 4000 N westward in this case.
Problem: A bicyclist travels at a constant speed of 12 m/s around a bend in
the road during a 34-s interval of time. If the cyclist was traveling northward
at the beginning of the bend and westward at the end, what are the magnitude and direction of the cyclist’s average acceleration during this interval?
W (t) and v
W (t + ∆t) be the the cyclist’s initial and final
Solution Let v
W i ≡ v
W f = v
W ≡ v
W f - v
W i ⇒
Wf = v
velocities, respectively. Note that ∆v
v
W i + ∆v W . Therefore, we
W by putting v
W from
can construct ∆ v
W i and v
W f tail-to-tail and constructing ∆ v
the head of v
W i to the head of v
W f (this is a valuable technique to remember for
W in this case is a vector pointing souththe future). Figure N1.5 shows that ∆ v
west. Using the Pythagorean theorem, that vector’s magnitude is
___________________
│∆v
W│ =
(12 m/s)2 + 12(m/s)2 = 17 m/s
(N1.15)
W│/∆t =
The magnitude of the bicyclist’s average acceleration is therefore │∆v
(17 m/s)/(34 s) = 0.50 m/s2. So the cyclist’s average acceleration during this
interval is 0.5 m/s2 southwest (even though the cyclist’s speed is constant!).
Exercise N1X.2
Suppose you throw a ball vertically into the air. The ball leaves your hand
traveling upward at a speed of 15 m/s. Three seconds later, the ball passes
you going downward with the same speed. What is the magnitude and direction of the ball’s average acceleration during this time interval?
N1.6
Uniform Circular Motion
Circular motion (or approximately circular motion) appears in a broad variety of physical situations, such as atomic orbitals, bicycle wheels, hurricanes,
satellite orbits, and galactic rotation. Historically, one of the ideas that helped
Newton build his theory was growing awareness in the mid-1600s that even
an object that is moving along a circular path (even if it has a constant speed)
is accelerating, because the direction of its velocity is changing.
Example N1.3
vi = 20 m/s east
vf = 14 m/s east
∆v
Figure N1.4
The car’s change in velocity in
this example points westward,
according to the definition of
the vector difference.
Example N1.4
v(t + ∆t)
v(t)
∆v
v(t)
v(t + ∆t)
Figure N1.5
The cyclist’s change in velocity.
14
Chapter N1
The definition of
uniform circular motion
In this section, we will use the definition of acceleration to determine
how an object’s acceleration in uniform circular motion (circular motion at
a constant speed) depends on the object’s speed and the radius of its circular path. Consider an object moving along the circular path shown in
figure N1.6a, and assume that it passes point P at time t. Let points 1 and
2 correspond to the object’s (center-of-mass) position at times t - _12 ∆t and
t + _12 ∆t, respectively, and let v
W1 and v
W2 be its instantaneous velocities at those
times. If the object’s speed is constant, then │v
W1│=│v
W2│. Note also that if θ is
the angle through which the object moves during time ∆t, then because v
W1
and v
W2 are both tangent to the circle, the angle between these vectors is also θ.
Now, the object’s acceleration aW (t) at time t will be best approximated by
its average acceleration between times t - _ 12 ∆t and t + _ 12 ∆t, meaning that
The direction of the
object’s acceleration
Newton’s Laws
W2 - v
W1
v
W(t + _ 12 ∆t) - v W (t - _ 12 ∆t) v
aW (t) ≈ aW 12 = ____________________
= ______
∆t
∆t
How the acceleration
depends on radius
How the acceleration
depends on speed
The general formula
(N1.16)
I have drawn the vector aW (t) ∆t = v
W2 - v
W1 on the diagram so that the tail of
aW (t) is located right at the top of the circle. We see that because │v
W1│=│v
W2│, the
vector aW (t) points directly toward the circle’s center. The direction of aW will not
change if we take the limit that ∆t #$ 0, so this is an exact result. Moreover,
since all positions on the circle are equivalent, this must be true of the object’s
acceleration at all points on the circle: the acceleration of an object in uniform
circular motion always points toward the circle’s center.
Now, figure N1.6b shows the situation if we decrease the circle’s radius
by a factor of 2 but keep the speed the same. The lengths of the arrows representing v
W1 and v
W2 are the same as before, but in the same time interval ∆t,
the object goes an angle 2θ around the smaller circle instead of θ. This makes
the acceleration arrow aW ∆t approximately twice as large as before (and the
approximation becomes more accurate as θ #$ 0). So we see that │ aW│∝ 1/r.
On the other hand, figure N1.6c shows the situation if we keep the circle’s radius the same as it was in figure N1.6a but double the object’s speed.
Now the arrow lengths are double what they were before and the angle
between them has also doubled (because the object goes twice as far around
the circle’s circumference in the same interval ∆t). This makes the acceleration arrow aW ∆t approximately four times as large as before (and again the
approximation becomes more accurate as θ #$ 0). So we see that│ aW│∝ │v
W│2.
The simplest formula that embraces all these results is
│v
W│2
aW = ____
r
toward the circle’s center
(N1.17)
• Purpose: This equation specifies the instantaneous acceleration aW of an
object in uniform circular motio