FANUC > LR Mate 200*C
MECHANICAL UNIT
MAINTENANCE MANUAL
B-82585EN/02
Before using the Robot, be sure to read the "FANUC Robot Safety Manual (B-80687EN)" and
understand the content.
• No part of this manual may be reproduced in any form.
• All specifications and designs are subject to change without notice.
The products in this manual are controlled based on Japan’s “Foreign Exchange and
Foreign Trade Law”. The export from Japan may be subject to an export license by the
government of Japan.
Further, re-export to another country may be subject to the license of the government of
the country from where the product is re-exported. Furthermore, the product may also be
controlled by re-export regulations of the United States government.
Should you wish to export or re-export these products, please contact FANUC for advice.
In this manual we have tried as much as possible to describe all the various matters.
However, we cannot describe all the matters which must not be done, or which cannot be
done, because there are so many possibilities.
Therefore, matters which are not especially described as possible in this manual should be
regarded as ”impossible”.
SAFETY PRECAUTIONS
B-82585EN/02
1
SAFETY PRECAUTIONS
For the safety of the operator and the system, follow all safety
precautions when operating a robot and its peripheral devices installed
in a work cell.
In addition, refer to the “FANUC Robot SAFETY HANDBOOK
(B-80687EN)”.
1.1
WORKING PERSON
The personnel can be classified as follows.
Operator:
• Power ON/OFF for robot controller
• Start of robot program with operator’s panel
Programmer or teaching operator:
• Operate for Robot
• Teaching inside safety fence
Maintenance engineer:
• Operate for Robot
• Teaching inside safety fence
• Maintenance (adjustment, replacement)
-
An operator cannot work inside the safety fence.
A programmer, Teaching operator and maintenance engineer can
work inside the safety fence. The workings inside safety fence
are lifting, setting, teaching, adjusting, maintenance, etc.
To work inside the fence, the person must be trained for the
robot.
Table 1 lists the workings of outside the fence. In this table, the
symbol “{“ means the working allowed to be carried out by the
personnel.
s-1
SAFETY PRECAUTIONS
B-82585EN/02
Table 1 List of workings outside the fence
Operator Programmer
or Teaching
operator
Power ON/OFF for Robot controller
Select operating mode (AUTO, T1, T2)
Select Remote/Local mode
Select robot program with teach pendant
Select robot program with external device
Start robot program with operator’s panel
Start robot program with teach pendant
Reset alarm with operator’s panel
Reset alarm with teach pendant
Set data on the teach pendant
Teaching with teach pendant
Emergency stop with operator’s panel
Emergency stop with teach pendant
Emergency stop with safety fence open
Maintain for operator’s panel
Maintain for teach pendant
{
{
{
{
{
{
{
{
{
{
{
{
{
{
{
{
{
{
{
Maintenance
engineer
{
{
{
{
{
{
{
{
{
{
{
{
{
In operating, programming and maintenance, the programmer,
teaching operator and maintenance engineer take care of their safety
using the following safety protectors, for example.
•
•
•
Use adequate clothes, uniform, overall for operation
Put on the safety shoes
Use helmet
s-2
B-82585EN/02
1.2
SAFETY PRECAUTIONS
WORKING PERSON SAFETY
Working person safety is the primary safety consideration. Because
it is very dangerous to enter the operating space of the robot during
automatic operation, adequate safety precautions must be observed.
The following lists the general safety precautions.
Careful
consideration must be made to ensure working person safety.
(1) Have the robot system working person attend the training courses
held by FANUC.
FANUC provides various training courses. Contact our sales office for details.
(2) Even when the robot is stationary, it is possible that the robot is
still in a ready to move state, and is waiting for a signal. In this
state, the robot is regarded as still in motion. To ensure
working person safety, provide the system with an alarm to
indicate visually or aurally that the robot is in motion.
(3) Install a safety fence with a gate so that no working person can
enter the work area without passing through the gate. Install an
interlock switch, a safety plug, and so forth in the safety gate so
that the robot is stopped as the safety gate is opened.
The controller is designed to receive this interlock signal of the door switch.
When the gate is opened and this signal received, the controller stops the robot in
an emergency. For connection, see Fig.1.1.
(4) Provide the peripheral devices with appropriate grounding (Class
A, Class B, Class C, and Class D).
(5) Try to install the peripheral devices outside the work area.
(6) Draw an outline on the floor, clearly indicating the range of the
robot motion, including the tools such as a hand.
(7) Install a mat switch or photoelectric switch on the floor with an
interlock to a visual or aural alarm that stops the robot when a
working person enters the work area.
(8) If necessary, install a safety lock so that no one except the
working person in charge can turn on the power of the robot.
The circuit breaker installed in the controller is designed to disable anyone from
turning it on when it is locked with a padlock.
s-3
SAFETY PRECAUTIONS
B-82585EN/02
(9) When adjusting each peripheral device independently, be sure to
turn off the power of the robot.
Fig.1.2 Safety fence and safety gate
E-stop board
FENCE1
FENCE11
NOTE
Terminal FENCE1 and terminal FENCE11 are on
the PC board in the E-stop unit.
NOTE
Please drop the power supply of the robot control
system at once when the worker is placed by the
robot by any chance or it is confined, push the robot
arm directly, change posture, and liberate the
worker.
s-4
B-82585EN/02
1.2.1
SAFETY PRECAUTIONS
General Person Safety
The general person is a person who operates the robot system. In this
sense, a worker who operates power on/off of the robot system or the
teach pendant is also a general person.
The general person can’t operate inside a safety fence.
(1) Operate the robot system at a location outside of the safety fence.
(2) If it is not necessary for the robot to operate, turn off the power
of the robot controller or press the EMERGENCY STOP button,
and then proceed with necessary work.
(3) Install an EMERGENCY STOP button within the general
person’s reach.
The robot controller is designed to be able to connect to an external
EMERGENCY STOP button. With this connection, the controller stops the robot
operation when the external EMERGENCY STOP button is pressed. See the
diagram below for connection.
E-stop board
EMGIN1
EMGIN11
Fig.1.2.1 Circuit diagram for external emergency stop button
s-5
SAFETY PRECAUTIONS
1.2.2
B-82585EN/02
Safety of the Teaching Operator
While teaching the robot, it is necessary for the operator to enter the
work area of the robot. It is particularly necessary to ensure the
safety of the teaching operator.
(1) Unless it is specifically necessary to enter the robot work area,
carry out all tasks outside the area.
(2) Before teaching the robot, check that the robot and its peripheral
devices are all in the normal operating condition.
(3) When entering the robot work area and teaching the robot, be
sure to check the location and condition of the safety devices
(such as the EMERGENCY STOP button and the DEADMAN
switch on the teach pendant).
(4) The teaching operator should pay careful attention so that no
other workers enter the robot work area.
Our teach pendant is provided with a DEADMAN switch as well as an emergency
stop button.
These button and switch function as follows:
(1) Emergency stop button: Causes an emergency stop when pressed.
(2) DEADMAN switch: Functions differently depending on the mode switch
setting status.
(a) When the switch is set to the enable position:
An emergency stop is made by releasing the DEADMAN switch.
(b) When the switch is set to the disable position:
The DEADMAN switch is disabled.
The operator’s intention of starting teaching is determined by the control unit
through the dual operation of setting the teach pendant enable/disable switch to
the enable position and pressing the DEADMAN switch. The operator should
make sure that the robot can operate in such conditions and be responsible in
carrying out tasks safely.
The teach pendant and peripheral device interface each send a robot start signal.
However, the validity of each signal changes depending on the teach pendant
enable switch and the remote condition of the software.
Table 1.2.2(a) STANDARD
Teach pendant enable
switch
Software remote condition
Teach pendant
Peripheral device
On
Ignored
Allowed to start
Not allowed
Off
Local
Remote
Not allowed
Not allowed
Not allowed
Allowed to start
s-6
SAFETY PRECAUTIONS
B-82585EN/02
Table 1.2.2(b) CE/RIA
Teach pendant
Mode
enable switch
On
AUTO mode
Off
On
T1, T2 mode
Off
Software remote
condition
Teach pendant
Operator panel
Peripheral device
Local
Remote
Local
Remote
Local
Remote
Local
Remote
Not allowed
Not allowed
Not allowed
Not allowed
Allowed to start
Allowed to start
Not allowed
Not allowed
Not allowed
Not allowed
Allowed to start
Not allowed
Not allowed
Not allowed
Not allowed
Not allowed
Not allowed
Not allowed
Not allowed
Allowed to start
Not allowed
Not allowed
Not allowed
Not allowed
(5) (When CE or RIA specification is selected.) To start the system
using the operator’s panel, make certain that nobody is the robot
work area and that there are no abnormal conditions in the robot
work area.
(6) When a program is completed, be sure to carry out a test run
according to the procedure below.
(a) Run the program for at least one operation cycle in the
single step mode at low speed.
(b) Run the program for at least one operation cycle in the
continuous operation mode at low speed.
(c) Run the program for one operation cycle in the continuous
operation mode at the intermediate speed and check that no
abnormalities occur due to a delay in timing.
(d) Run the program for one operation cycle in the continuous
operation mode at the normal operating speed and check
that the system operates automatically without trouble.
(e) After checking the completeness of the program through the
test run above, execute it in the automatic operation mode.
(7) While operating the system in the automatic operation mode, the
teaching operator should leave the robot work area.
s-7
SAFETY PRECAUTIONS
1.2.3
B-82585EN/02
Safety During Maintenance
For the safety of maintenance personnel, pay utmost attention to the
following.
(1) During operation, never enter the robot work area.
(2) Except when specifically necessary, turn off the power of the
controller while carrying out maintenance. Lock the power
switch, if necessary, so that no other person can turn it on.
(3) If it becomes necessary to enter the robot operation range while
the power is on, press the emergency stop button on the operator
panel, or the teach pendant before entering the range. The
maintenance personnel must indicate that maintenance work is in
progress and be careful not to allow other people to operate the
robot carelessly.
(4) When disconnecting the pneumatic system, be sure to reduce the
supply pressure.
(5) Before the start of teaching, check that the robot and its
peripheral devices are all in the normal operating condition.
(6) Do not operate the robot in the automatic mode while anybody is
in the robot work area.
(7) When it is necessary to maintain the robot alongside a wall or
instrument, or when multiple workers are working nearby, make
certain that their escape path is not obstructed.
(8) When a tool is mounted on the robot, or when any moving device
other than the robot is installed, such as belt conveyor, pay
careful attention to its motion.
(9) If necessary, have trained worker who knows the robot system
well stand beside the operator panel, and observe the operation.
In case any danger arises, the worker should be ready to press the
EMERGENCY STOP button at any time.
(10) During replacing or reinstalling components, Take care not to let
foreign matter enter the system.
(11) When handling each unit or printed circuit board in the controller
during inspection, turn off the circuit breaker to protect against
electric shock.
(12) When replacing parts, be sure to use those specified by FANUC.
In particular, never use fuses or other parts of non-specified
ratings. They may cause a fire or result in damage to the
components in the controller.
(13) When restarting the robot system after completing maintenance
work, make sure in advance that there is no person in the work
area and that the robot and the peripheral devices are not
abnormal.
s-8
B-82585EN/02
SAFETY PRECAUTIONS
1.3
SAFETY OF THE TOOLS AND PERIPHERAL DEVICES
1.3.1
Precautions in Programming
(1) Use a limit switch or other sensor to detect a dangerous condition
and, if necessary, design the program to stop the robot when the
sensor signal is received.
(2) Design the program to stop the robot when an abnormal
condition occurs in any other robots or peripheral devices, even
though the robot itself is normal.
(3) For a system in which the robot and its peripheral devices are in
synchronous motion, particular care must be taken in
programming so that they do not interfere with each other.
(4) Provide a suitable interface between the robot and its peripheral
devices so that the robot can detect the states of all devices in the
system and can stop them according to the their states.
1.3.2
Precautions for Mechanism
(1) Keep the component cells of the robot system clean, and operate
the robot in an environment free of grease, water, and dust.
(2) Employ a limit switch or mechanical stopper to limit the robot
motion so that the robot does not strike against its peripheral
devices or tools.
s-9
SAFETY PRECAUTIONS
1.4
SAFETY OF THE ROBOT MECHANISM
1.4.1
Precautions in Operation
B-82585EN/02
(1) When operating the robot in the jog mode, set it at an appropriate
speed so that the operator can manage the robot in any
eventuality.
(2) Before pressing the jog key, be sure you know in advance what
motion the robot will perform in the jog mode.
1.4.2
Precautions in Programming
(1) When the work areas of robots overlap, make certain that the
motions of the robots do not interfere with each other.
(2) Be sure to specify the predetermined work origin in a motion
program for the robot and program the motion so that it starts
from the origin and terminates at the origin.
Make it possible for the operator to easily distinguish at a glance
that the robot motion has terminated.
1.4.3
Precautions for Mechanisms
(1) Keep the work areas of the robot clean, and operate the robot in
an environment free of grease, water, and dust.
s-10
B-82585EN/02
SAFETY PRECAUTIONS
1.5
SAFETY OF THE END EFFECTOR
1.5.1
Precautions in Programming
(1) To control the pneumatic, hydraulic and electric actuators,
carefully consider the necessary time delay after issuing each
control command up to actual motion and ensure safe control.
(2) Provide the end effector with a limit switch, and control the robot
system by monitoring the state of the end effector.
s-11
SAFETY PRECAUTIONS
1.6
B-82585EN/02
WARNING LABEL
(1) Transportation attention label 1
500kg
100kg× 4
80kg×4
Fig. 1.6(a) Transportation attention label 1
Description
1)
2)
3)
Use a crane having a load capacity of 500 kg or greater.
Use at least four slings each having a withstand load of 980 N
(100 kgf) or greater.
Use at least four eyebolts each having a withstand load of 784 N
(80 kgf) or greater.
s-12
B-82585EN/02
SAFETY PRECAUTIONS
(2) Transportation attention label 2
注意
CAUTION
アイボルトを横引きしないこと
DO NOT PULL EYBOLTS
SIDEWAYS.
アイボルトを外してから使用
すること
REMOVE EYEBOLTS,BEFORE USE
Fig.1.6 (b) Transportation attention label 2
Description
Keep the following in mind about eyebolt.
1)
2)
Don’t pull eyebolt side ways.
Remove eyebolt before use.
s-13
SAFETY PRECAUTIONS
(3) Greasing attention label (When
A05B-1139-K021 is specified.)
B-82585EN/02
grease
applying
kit:
注意
CAUTION
① シリンダにグリスを入れる前に
チューブを揉んでグリスを柔らか
くして下さい。
② ブランジャーを2.5mm押すと
1ccのグリスが出ます。
① Please knead a tube and make
grease soft before supply grease
to cylinder.
② When you give a plunger 2.5mm
push, 1cc grease is injected.
軸/AXIS
給脂量/AMOUNT
J1
J2
J3
J4
J5
J6
3cc(7mm)
3cc(7mm)
2cc(5mm)
2cc(5mm)
2cc(5mm)
2cc(5mm)
グリス給脂時/AT GRESING
A370-3031-0130
Fig.1.6(c) Greasing attention label
Description
Keep the following in mind about grease applying kit.
1) Please knead a tube and make grease soft before supply
grease to cylinder.
2) When you give a plunger 2.5mm push, 1ml grease is injected.
s-14
SAFETY PRECAUTIONS
(4) Range of motion and payload mark label
Below label is added when CE specification is specified.
0deg
-180deg
+180deg
MOTION RANGE
OF J5-AXIS
ROTATION CENTER
A
J5-AXIS
ROTATION CENTER
B
B-82585EN/02
C
D
UNIT:mm
A
B
C
D
STANDARD 959 228 704 513
LONG ARM 1147 393 892 742
MAX.PAYLOAD:5kg
Fig.1.6 (d) Range of motion and payload mark label
s-15
PREFACE
B-82585EN/02
PREFACE
This manual explains the maintenance and connection procedures for
the mechanical units of the following robots:
Model name
Mechanical unit
specification No.
FANUC Robot LR Mate 200iC
A05B-1139-B201
FANUC Robot LR Mate 200iC
A05B-1139-B202
FANUC Robot LR Mate 200iC
A05B-1139-B203
FANUC Robot LR Mate 200iC
A05B-1139-B204
Maximum
load
A05B-1139-B211
FANUC Robot LR Mate 200iC/5L
A05B-1139-B212
5kg
FANUC Robot LR Mate 200iC/5LC
A05B-1139-B213
FANUC Robot LR Mate 200iC/5C
A05B-1139-B221
FANUC Robot LR Mate 200iC/5WP
A05B-1139-B231
FANUC Robot LR Mate 200iC/5H
A05B-1139-B101
FANUC Robot LR Mate 200iC/5H
A05B-1139-B102
FANUC Robot LR Mate 200iC/5H
A05B-1139-B103
FANUC Robot LR Mate 200iC/5H
A05B-1139-B104
Remarks
3-axes brake type
Non-severe dust/liquid
protection specification
6-axes brake type
Non-severe dust/liquid
protection specification
3-axes brake type
severe dust/liquid protection
specification
6-axes brake type
severe dust/liquid protection
specification
6-axes brake type Non-severe
dust/liquid protection
specification
6-axes brake type
severe dust/liquid protection
specification
6-axes brake type
Clean class 100 specification
6-axes brake type
Clean class 100 specification
6-axes brake type
Washing specification
3-axes brake type
Non-severe dust/liquid
protection specification
5-axes brake type
Non-severe dust/liquid
protection specification
3-axes brake type
severe dust/liquid protection
specification
5-axes brake type
severe dust/liquid protection
specification
NOTE
The following abbreviations are used herein.
STANDARD : LR Mate 200iC
5L
: LR Mate 200iC/5L
5LC
: LR Mate 200iC/5LC
5C
: LR Mate 200iC/5C
5WP
: LR Mate 200iC/5WP
5H
: LR Mate 200iC/5H
p-1
PREFACE
B-82585EN/02
The label stating the mechanical unit specification number is affixed
in the position shown below. Before reading this manual, determine
the specification number of the mechanical unit.
(1)
TYPE
NO.
DATE
(2)
(3)
(4)
WEIGHT
(5) ‚‹‚‡
OSHINO-MURA.
YAMANASHI PREF.JAPAN
TABLE 1)
(1)
CONTENTS
-
(2)
(3)
TYPE
(4)
No.
DATE
(5)
WEIGHT
(Without controller)
A05B-1139-B201
FANUC Robot
LR Mate 200iC
FANUC Robot
LR Mate 200iC/5L
LETTERS
FANUC Robot
LR Mate 200iC/5LC
FANUC Robot
LR Mate 200iC/5C
FANUC Robot
LR Mate 200iC/5WP
A05B-1139-B202
27kg
A05B-1139-B203
A05B-1139-B204
A05B-1139-B211
A05B-1139-B212
A05B-1139-B213
A05B-1139-B221
29kg
PRINT
SERIAL NO.
PRINT
PRODUCTION
YEAR AND MONTH
27kg
A05B-1139-B231
A05B-1139-B101
FANUC Robot
LR Mate 200iC/5H
A05B-1139-B102
26kg
A05B-1139-B103
A05B-1139-B104
Positon of label indicating mechanical unit specification number
p-2
PREFACE
B-82585EN/02
RELATED MANUALS
For the FANUC Robot series, the following manuals are available:
Safety handbook B-80687EN
All persons who use the FANUC
Robot and system designer must
read and understand thoroughly this
handbook
R-30iA Mate
controller
Operations
manual
LR HANDLING
TOOL
B-82724EN-1
Maintenance
manual
B-82725EN
B-82725EN-1
(For Europe)
B-82725EN-2
(For RIA)
Mechanical unit
Operator’s
manual
FANUC Robot
LR Mate 200iC
B-82584EN
p-3
Intended readers:
All persons who use FANUC Robot,
system designer
Topics:
Safety items for robot system
design, operation, maintenance
Intended readers:
Operator, programmer,
maintenance person, system
designer
Topics:
Robot functions, operations,
programming, setup, interfaces,
alarms
Use:
Robot operation, teaching, system
design
Intended readers:
Maintenance person, system
designer
Topics:
Installation, connection to peripheral
equipment, maintenance
Use:
Installation, start-up, connection,
maintenance
Intended readers:
System designer, Maintenance
person
Topics:
Installation, connection to controller,
maintenance
Use:
Installation, start-up, connection,
maintenance
TABLE OF CONTENTS
B-82585EN/02
TABLE OF CONTENTS
SAFETY PRECAUTIONS............................................................................s-1
PREFACE ....................................................................................................p-1
1
2
CHECKS AND MAINTENANCE ............................................................. 1
1.1
1.2
1.3
1.4
1.5
1.6
DAILY CHECKS ............................................................................................ 2
First 1-Month (320 hours operating) Check ................................................... 5
3-month (960 hours) checks .......................................................................... 5
1-year (3,840 hours) checks .......................................................................... 7
1.5-year (5,760 hours) checks ....................................................................... 7
2-year (7,680 hours) checks (LR Mate 200iC /5WP)
4-year (15,360 hours) checks (LR Mate 200iC, LR Mate
200iC/5L , /5C, /5LC, /5H) ............................................................................. 8
1.7
MAINTENANCE TOOLS ............................................................................... 9
PERIODIC MAINTENANCE .................................................................. 11
2.1
2.2
3
2.2.1
Grease replacement procedure of the J1-axis reducer ............................................17
2.2.2
Grease replacement procedure of the J2-axis reducer ............................................18
2.2.3
Grease replacement procedure of the J3-axis reducer ............................................19
2.2.4
Grease replacement procedure of the J4-axis reducer ............................................20
2.2.5
Grease replacement procedure of the J5/J6-axis reducer .......................................22
TROUBLESHOOTING .......................................................................... 23
3.1
3.2
3.3
4
REPLACING THE BATTERIES
(1-YEAR CHECKS (battery built-in type))
(1.5-YEAR CHECKS (external battery type))............................................... 12
REPLENISH THE GREASE OF THE DRIVE MECHANISM
(4 years (11,520 hours) checks) .................................................................. 15
OVERVIEW ................................................................................................. 24
FAILURES, CAUSES AND MEASURES ..................................................... 25
BACKLASH MEASUREMENT..................................................................... 32
REPLACING PARTS ............................................................................ 36
4.1
4.2
4.3
4.4
4.5
FIGURE OF DRIVE MECHANISM .............................................................. 38
REPLACING J1-AXIS MOTOR.................................................................... 41
REPLACING J1-AXIS REDUCER ............................................................... 43
REPLACING J2-AXIS MOTOR.................................................................... 49
REPLACING J2-AXIS REDUCER ............................................................... 53
c-1
TABLE OF CONTENTS
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
4.14
4.15
4.16
4.17
4.18
5
B-82585EN/02
REPLACING J3-AXIS MOTOR.................................................................... 57
REPLACING J3-AXIS REDUCER ............................................................... 59
REPLACING J4-AXIS MOTOR.................................................................... 62
REPLACING J4-AXIS REDUCER ............................................................... 64
REPLACING J5-AXIS MOTOR.................................................................... 68
REPLACING J5-AXIS REDUCER ............................................................... 71
REPLACING J6-AXIS MOTOR.................................................................... 74
REPLACING WRIST UNIT .......................................................................... 77
REPLACING J6-AXIS REDUCER ............................................................... 80
REPLACING J3 BELT ................................................................................. 82
REPLACING J5/J6 BELT ............................................................................ 84
REPLACING SOLENOID VALVE ................................................................ 86
SEALANT APPLICATION............................................................................ 88
REPLACING CABLES .......................................................................... 89
5.1
5.2
5.3
CABLE WIRING........................................................................................... 90
CABLE FORMING ....................................................................................... 92
CABLE AND AIR TUBE REPLACEMENT ................................................... 95
5.3.1
REPLAING CABLE K101 and Air tube (Connector plate to J2 base)..................95
5.3.2
REPLAING CABLE K106, K107, K108 and Air tube (J2 base to J3
casing) ..................................................................................................................102
5.3.3
REPLAING CABLE K102, K103, K104, K105, K109, K110, K111,
K112, K113 ..........................................................................................................108
6
5.3.4
REPLAING CABLE K104 ..................................................................................109
5.3.5
REPLAING AIR TUBE .......................................................................................110
ADJUSTMENTS.................................................................................. 117
6.1
6.2
ADJUSTING TENSION OF BELT.............................................................. 118
MASTERING ............................................................................................. 120
6.2.1
RESETTING ALARMS AND PREPARING FOR MASTERING .....................121
6.2.2
FIXTURE POSITION MASTER.........................................................................122
APPENDIX
A
SPARE PARTS LIST .......................................................................... 131
B
CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM................................ 141
C
PERIODIC MAINTENANCE TABLE ................................................... 160
D
MOUNTING BOLT TORQUE LIST ..................................................... 166
c-2
1.CHECKS AND MAINTENANCE
B-82585EN/02
1
CHECKS AND MAINTENANCE
Optimum performance of the robot can be maintained by performing
the periodic maintenance procedures presented in this chapter.
(See the APPENDIX A PERIODIC MAINTENANCE TABLE.)
NOTE
The periodic maintenance procedures described in
this chapter assume that the FANUC robot is used
for up to 3840 hours a year. When using the robot
beyond this total operating time, correct the
maintenance frequencies shown in this chapter by
calculation in proportion to the difference between
the actual operating time and 3840 hours/year.
-1-
1.CHECKS AND MAINTENANCE
1.1
B-82585EN/02
DAILY CHECKS
Clean each part, and visually check component parts for damage
before daily system operation. Check the following items as the
occasion demands.
(1) Before turning on power
Item
1
Check items
When air
Air pressure
control set
is provided.
2
3
4
5
6
7
8
9
Check points
When air
purge kit is
prorided.
Leakage from
hose
Supply
pressure
Dryer
Vibration, abnormal noises
and motor heating
Changing repeatability
Check air pressure using the pressure gauge
on the air regulator as shown in Fig.1.1.If it
does not meet the specified pressure of
0.49MPa (5 kg/cm2), adjust it using the
regulator pressure setting handle.
Check the joints, tubes, etc. for leaks.
Repair leaks, or replace parts, as required.
Check the supply pressure using the air
purge kit shown in Fig.1.1 (b). If it does not
meet the specified pressure of 10 KPa (0.1
kgf/cm2), adjust it using the regulator
pressure setting handle.
Check whether the color of the dew point
checker is blue. When it is not blue, identify
the cause and replace the dryer. Maintenance
for air purge kit, refer to the operator’s
manual attached kit.
Check whether each axis moves smoothly
Check whether the stop positions of the robot
have not deviated from the previous stop
positions.
Peripheral devices for
Check whether the peripheral devices operate
proper operation
properly according to commands from robot.
Each axis brake
Refer to 3.2.
Cleaning and checking each Clean each part (remove chips, etc.) and
part
check component parts for cracks and flaws.
Pressure
Adjusting Knob
2-6.5×16.5
Length round hole
Rc1/4
AIR OUTLET
Pressure gauge
Rc1/4
AIR SUPPLY
Fig.1.1(a) Air control set
-2-
1.CHECKS AND MAINTENANCE
B-82585EN/02
Pneumatic tube
Dry air
Filter and regulator
Dew point checker
2-7x11
Length round hole
Air outlet
(O6 Air tube)
Pressure gauge
Pneumatic
air outlet
Air inlet
(O10 air tube)
Pressure adjustment knob
S
O
O
S
Dryer unit
Fig.1.1(b)
Air purge kit (option)
(2) After turning on power
Item
Check items
Check points
1
Vibration, abnormal
noises, and motor
heating
2
Changing
repeatability
3
Peripheral devices
for proper operation
Check whether the robot moves along and
about the axes smoothly without unusual
vibration or sounds. Also, check whether the
temperatures of the motors are excessively
high.
Check to see that the stop positions of the
robot have not deviated from the previous
stop positions.
Check whether the peripheral devices
operate properly according to commands
from the robot.
Check that the end effector drops within 2 mm
when the power is cut.
4
Brakes for each axis
-3-
1.CHECKS AND MAINTENANCE
B-82585EN/02
(Note 1) Cleaning
-
Necessary cleaning points, dust on the flat part, sedimentation of
spatters
Clean sediments periodically.
In particular, clean the following points carefully.
-
Vicinity of the wrist axis and oil seal
→ If chippings or spatters are attached to the oil seal, an oil
leak may be caused.
Check if the vicinity of the necessary inspection points, wrist part,
and J3 arm significantly wears due to rubbing against the
welding cable or hand cable.
Check if there is a trace of a collision around the hand.
Check the reducer or grease bath for an oil leak.
→ If oil can be found a day after wiping oil, an oil leak may be
caused.
Fig 1.1(c) Cleaning part
-4-
1.CHECKS AND MAINTENANCE
B-82585EN/02
1.2
First 1-Month (320 hours operating) Check
Check the following items after the first one-month operation (or 320
hours operating)
First 1-month check
Item
1
1.3
Check items
Check points
Control unit cable and
robot connecting cable
Check whether the cable connected to
the teach pendant and robot is unevenly
twisted.
3-month (960 hours) checks
Check the following items once every three months (960 hours).
Additional inspection areas and times should be added to the table
according to the robot’s working conditions, environment, etc.
(1) 3-month checks
Item
Check items
1
Control unit cable
and robot
connecting cable
Ventilation portion
of control unit
Cleaning and
checking each part
2
3
Check points
(See Section 1.2)
If the ventilation portion of the control unit is
dusty, turn off the power and clean the unit.
(See Section 1.1)
Check the following items at the first quarterly inspection, then every
year thereafter. (See the Section 1.4.)
(2) First quarterly inspection
Item
1
2
Check items
Connector used in
mechanical unit
Further tightening
external main bolts
-5-
Check points
Check that the connectors of the connector
panels are securely engaged. (NOTE2)
Tighten the end-effecter mounting bolts and
external main bolts. (NOTE3)
1.CHECKS AND MAINTENANCE
B-82585EN/02
(NOTE 2) Inspection points of the connectors
-
Robot connection cables, earth terminal and user cables
Check items
-
Circular connector: Check the connector for looseness by turning
it manually.
Square connector: Check the connector for disengagement of its
lever.
Earth terminal: Check the terminal for looseness by turning.
Fig 1.3 Check items of connector
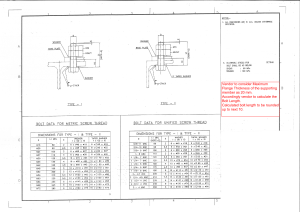
(NOTE 3) Points to be retightened
-
The end effecter mounting bolts, robot installation bolts, and
bolts to be removed for inspection need to be retightened.
The bolts exposed to the outside of the robot need to be
retightened.
For the tightening torque, see the recommended bolt tightening
torque shown in the Appendix.
A loose prevention agent (adhesive) is applied to some bolts. If
the bolts are tightened with greater than the recommended torque,
the loose prevention agent may be removed. So, follow the
recommended tightening torque when retightening them.
-6-
1.CHECKS AND MAINTENANCE
B-82585EN/02
1.4
1-year (3,840 hours) checks
Check the following items about once every year (3,840 hours).
Item
1
2
3
1.5
Check items
Tightness of major
external bolts
Tightness of major
external bolts
Battery (battery
built-in type)
Check points
(See Section 1.3)
(See Section 1.3)
Replace battery in the mechanical unit. (See
Section 2.1)
1.5-year (5,760 hours) checks
Check the following items about once every year (5,760 hours).
Item
1
Check items
Battery
(external battery
type)
-7-
Check points
Replace battery in the mechanical unit. (See
Section 2.1)
1.CHECKS AND MAINTENANCE
1.6
B-82585EN/02
2-year (7,680 hours) checks (LR Mate 200iC /5WP)
4-year (15,360 hours) checks (LR Mate 200iC, LR Mate
200iC/5L , /5C, /5LC, /5H)
Check the following items in the cycle that is shorter among every
four years and 15,360 hours.
Item
1
Check itmes
Greasing of
reducers of
each axis
Check points
Specified grease
Harmonic grease 4BNo.2
Spec:A98L-0040-0230#2KG
Greasing kit
(tube of grease plus injector)
Spec:A05B-1139-K021
Tube of grease (80 g)
Spec:A05B-1139-K022
Do not use Harmonic grease SK-3 or
unspecified grease.
-8-
1.CHECKS AND MAINTENANCE
B-82585EN/02
1.7
MAINTENANCE TOOLS
The following tools and instruments are required for the maintenance
procedures contained in this manual.
(a) Measuring instruments
Instrument
Tension meter
Instruments
Specifications
Vendor
Manufacturer model No.
Application
DOCTOR TENSION
TYPE-Ⅱ
Adjustment of belt tension
A97L-0218-0700 Mitsuboshi Belting Ltd.
Accuracy/Tolerance
Applications
Dialgauge accuracy
1/100 mm
Measurement of
positioning and backlash
Slide calipers
150 mm
(b) Tools
・・Torque wrench
Setting 5.6Nm(57kgfcm)
Setting 5.4Nm(55kgfcm)
Setting 4.5Nm(46kgfcm)
Setting 2.0Nm(20kgfcm)
Setting 1.3Nm(13kgfcm)
・Cross tip (+) screwdrivers
・Flat tip (–) screwdrivers
・Box driver
・Hex-head wrench set
・Monkey wrench
・Pincers
・Radio pincers
・Nippers
・Glasses wrench
・Pliers for C–retaining ring
・Loctite 242、262、518、638
・Grease applying kit A05B-1139-K021
(It is options that grease (80g) for the grease
greasing with the injection syringe and the
tube makes a set.)
・grease in tube (80g) A05B-1139-K022
-9-
M5
M4
M4
M3, M4
M3
Large, medium,
and small sizes
Large, medium,
and small sizes
M2.5 to M6
M2.5 to M6
Middle, little
1.CHECKS AND MAINTENANCE
O5
B-82585EN/02
Fig 1.7 example of cylinder
- 10 -
2.PERIODIC MAINTENANCE
B-82585EN/02
2
PERIODIC MAINTENANCE
- 11 -
2.PERIODIC MAINTENANCE
2.1
B-82585EN/02
REPLACING THE BATTERIES
(1-YEAR CHECKS (battery built-in type))
(1.5-YEAR CHECKS (external battery type))
The position data of each axis is preserved by the backup batteries.
The batteries need to be replaced every 1 year in case of battery
built-in J1 base type 1.5 years in case of external battery type. Also,
use the following procedure to replace when the backup battery
voltage drop alarm occurs.
Procedure of replacing the battery (battery built-in type)
1
Keep the power on. Press the EMERGENCY STOP button to
prohibit the robot motion.
CAUTION
Replacing the batteries with the power supply
turned off causes all current position data to be lost.
Therefore, mastering will be required again.
2
3
4
When severe dust/liquid protection or 5LC,5WP,5C is selected,
remove the battery case cap. (Fig. 2.1(a))
Loosen the plate screw, take out the lid of the battery box, and
replace battery. Battery can be taken out by pulling the stick,
which is center of the battery box.
Assemble them by the opposite procedure. Pay attention to the
direction of batteries. Please exchange packing absolutely when
severe dust/liquid protection specification or 5LC,5WP,5C is
selected.
C battery(4pcs)
FANUC spec:A98L-0031-0027
The battery can be taken out
by pulling this stick
Lid of battery bolx
Plate screw M4X12(2pcs)
Packing
A290-7139-X253
(*)
Bolt with plate processing
hex-head hole
M4X20(4pcs)
(*)
Battery box cover
(*)
(*)Severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H
or LR Mate 200iC/5LC,5C,5WP are specified.
Fig.2.1 (a) Replacing the battery (battery built-in type)
- 12 -
2.PERIODIC MAINTENANCE
B-82585EN/02
Procedure of replacing the battery (external battery type)
1
Keep the power on. Press the EMERGENCY STOP button to
prohibit the robot motion.
CAUTION
Be sure to keep the power on.
Replacing the batteries with the power supply
turned off causes all current position data to be lost.
Therefore, mastering will be required again.
2
3
4
5
Remove the battery case cap. (Fig. 2.1(b))
Take out the old batteries from the battery case.
Insert new batteries into the battery case. Pay attention to the
direction of batteries.
Close the battery case cap.
External battery bolx
Battery cable
Diameter About O5mm
(Max O5.5mm)
Battery case
Case cap
Battery spec;A98L-0031-0005
(D battery 4pcs)
Fig.2.1 (b) Replacing the battery (external battery type)
- 13 -
2.PERIODIC MAINTENANCE
B-82585EN/02
Fig 2.1(c) shows the external size of external battery box.
When the battery box needs to be built into the control unit or other
internal units, refer to the outer dimensions shown in Fig.2.1(c)
The battery box can be fixed by using M4 flat–head screws. (The bolts
do not come with the system.)
A maximum of six terminals can be attached to the backplane of the
battery box.
Fig.2.1(c) Outer dimensions of the battery box
- 14 -
2.PERIODIC MAINTENANCE
B-82585EN/02
2.2
REPLENISH THE GREASE OF THE DRIVE MECHANISM
(4 years (11,520 hours) checks)
Replacing the grease of the reducers every four years or 15,360 hours
by using the following procedures.
For the grease name and quantity, see the table 2.2 (a).
Table 2.2 (a) Grease for 4-year periodical Replacement
Greasing points
Greasing amount
Specified grease
J1-axis reducer
J2-axis reducer
J3-axis reducer
J4-axis reducer
J5-axis reducer
J6-axis reducer
2.7g(3ml)
2.7g(3ml)
1.8g(2ml)
1.8g(2ml)
1.8g(2ml)
1.8g(2ml)
Harmonic grease 4BNo.2
Spec: A98L-0040-0230
For grease replacement, use the attitudes indicated below.
Table 2.2 (b) Attitudes for greasing
Supply position
J1-axis reducer
J2-axis reducer
J3-axis reducer
J4-axis reducer
J5-axis reducer
J6-axis reducer
J1
J2
-90°
90°
Arbitrary Arbitrary
Attitude
J3
J4
J5
J6
Arbitrary Arbitrary Arbitrary Arbitrary
CAUTION
The following maintenance kits are prepared for the
grease greasing.
Greasing kit: A05B-1139-K021
(This a set of greasing syringe and grease in tube.)
Grease in tube: A05B-1139-K022
There is no J6-axis for LR Mate 200iC/5H
- 15 -
2.PERIODIC MAINTENANCE
B-82585EN/02
1
2
3
4
NOTE
If greasing is performed incorrectly, the internal
pressure of the grease bath may suddenly increase,
possibly causing damage to the seal, which would in
turn lead to grease leakage and abnormal operation.
When performing greasing, therefore, observe the
following cautions.
In case of J1-axis and J3-axis, before starting to
grease, open the grease outlet (remove the seal bolt
from the grease outlet).
Use grease only of the specified type. Grease of a
type other than that specified may damage the
reducer or lead to other problems. Do no use
Harmonic grease SK-3
To prevent accidents caused by slipping, completely
remove any excess grease from the floor or robot.
Please fill a necessary amount to the injection
syringe after softening grease in the tube massaging
it by the hand when you use the grease greasing kit.
Please install the nozzle in the point of the injection
syringe. Please remove the nozzle and do the cap
when you do not use the injection syringe.
- 16 -
2.PERIODIC MAINTENANCE
B-82585EN/02
2.2.1
Grease replacement procedure of the J1-axis reducer
1
2
3
4
5
6
Move the robot to the attitude of J1=-90° and J2=90°.
Turn off the power.
Remove the bolt/seal bolt (1) and cover U (2). In case of packing
is attached, remove packing (3), too.
Remove seal bolt of two places refer to fig.2.2.1.
Supply regulated amount grease through the grease inlet by using
injection syringe. Pay attention that grease inlet differs in case of
floor mount and top mount. At this time, note that grease might
come out from the side not used.
Assemble parts in the opposite procedure. In case of packing is
attached,be sure to replace packing.
1
2
4
3
J1-axis reducer grease inlet
seal bolt
(In case of top mount)
J1-axis reducer grease inlet
seal bolt
(In case of floor mount)
Fig. 2.2.1 Replacing grease of the J1-axis reducer
Name
Specification
Amount
BOLT
SEAL BOLT
SEAL BOLT
Loctite
Torque N-m (kgf-cm)
A6-BA-4X8
4
1
A97L-0218-0496#M4X10BC(*1)
4
4.5 N-m (46kgf-cm)
A97L-0218-0496#M4X10EN(*2)
4
A290-7139-X332(*3)
1
2 COVER U
A290-7139-Y332(*4)
1
A290-7139-Z332(*5)
1
3 PACKING
A290-7139-X356 (*6)
1
4 COVER
A290-7139-X347
1
(*1) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*2) When LR Mate 200iC/5LC,5WP 5C is specified.
(*3) When LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*4) When LR Mate 200iC,LR Mate 200iC/5C,5LC is specified.
(*5) When LR Mate 200iC,LR Mate 200iC/5WP is specified.
(*6) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP 5C is specified.
- 17 -
2.PERIODIC MAINTENANCE
2.2.2
B-82585EN/02
Grease replacement procedure of the J2-axis reducer
1
2
Turn off the power.
Remove the seal bolt (1), (2) and remove cover S (3) and packing
(4). Supply grease through the grease inlet by using injection
syringe. Be sure to spread it to round in the gear because a
regulated amount is a standard.
Attach cover S (3) and packing (4). In this time, note the
installation phase. Be sure to replace packing. When reusing the
seal bolt, be sure to seal it with seal tape.
3
Spread the round grease
on the tooth side like this.
Pay attention
to direction
1
3
A
2
DETAIL A
4
Fig. 2.2.2 Replacing grease of the J2-axis reducer
Name
Specification
Amount
SEAL BOLT
A97L-0218-0738#040808BC(*1)
1
SEAL BOLT
A97L-0218-0738#040808EN(*2)
SEAL BOLT
A97L-0218-0595#040808BC(*1)
2
SEAL BOLT
A97L-0218-0595#040808EN(*2)
3 COVER S
A290-7139-X309
4 PACKING
A290-7139-X351
(*1) When LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*2) When LR Mate 200iC/5LC,5WP,5C is specified.
- 18 -
2
2
2
2
1
1
Loctite
Torque N-m (kgf-cm)
2.0 N-m (46kgf-cm)
2.0 N-m (46kgf-cm)
2.0 N-m (46kgf-cm)
2.0 N-m (46kgf-cm)
2.PERIODIC MAINTENANCE
B-82585EN/02
2.2.3
Grease replacement procedure of the J3-axis reducer
1
2
3
4
Turn off the power.
Remove the bolt/seal bolt (1) and J2 arm cover (2). In case of
packing is attached, remove packing (3), too.
Supply regulated amount grease through the grease inlet by
using
injection syringe. Please use arbitrary one as a greasing inlet.
Attach J2 arm cover. In case of packing is attached,be sure to
replace packing of. When reusing the seal bolt, be sure to seal
it with seal tape.
3
2
1
J3-axis reducer
grease inlet
seal bolt
Fig. 2.2.3 Replacing grease of the J3-axis reducer
Name
Specification
Amount
BOLT
SEAL BOLT
SEAL BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10
3
2.0 N-m (20kgf-cm)
1
A97L-0218-0496#M4X12BC(*1)
8
4.5 N-m (46kgf-cm)
A97L-0218-0496#M4X12EN(*2)
8
4.5 N-m (46kgf-cm)
A290-7139-X306
1
A290-7139-X308 (*1)
1
2
J2 ARM COVER
A290-7139-Y308 (*3)
1
A290-7139-Z308 (*4)
1
3
PACKING
A290-7139-X355 (*5)
1
(*1) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*2) When LR Mate 200iC/5LC,5WP,5C is specified.
(*3) When LR Mate 200iC/5LC,5C is specified.
(*4) When LR Mate 200iC/5WP is specified.
(*5) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 19 -
2.PERIODIC MAINTENANCE
2.2.4
B-82585EN/02
Grease replacement procedure of the J4-axis reducer
NOTE
Fig. 2.2.4 is an example of standard type.
In case of 5H type, read J5/J6 as J4/J5.
1
2
3
4
Turn off the power.
Remove the bolt/seal bolt (1) and J3 cover (2). In case of
packing is attached, remove packing (3), too.
Supply regulated amount grease through the grease inlet by
using injection syringe. Please note that grease might come out
immediately after in the greasing or the greasing. Please note
greasing excessively even in that case.
Attach J3 cover. In this time, be sure to replace packing . When
reusing the seal bolt, be sure to seal it with seal tape.
J4-axis reducer grease inlet
seal bolt
1
3
2
Fig. 2.2.4 Replacing grease of the J4-axis reducer (LR Mate 200iC)
- 20 -
2.PERIODIC MAINTENANCE
B-82585EN/02
Name
Specification
Amount
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10
3
2.0 N-m (20kgf-cm)
A97L-0218-0496#M4X12BC(*1)
6
2.0 N-m (20kgf-cm)
A97L-0218-0496#M4X12EN(*2)
6
2.0 N-m (20kgf-cm)
A290-7139-X404
1
A290-7139-X406 (*1)
1
2
J3 COVER
A290-7139-Y406 (*3)
1
A290-7139-Z406 (*4)
1
3
PACKING
A290-7139-X451 (*5)
1
(*1) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*2) When LR Mate 200iC/5LC,5WP 5C is specified.
(*3) When LR Mate 200iC/5LC,5C is specified.
(*4) When LR Mate 200iC/5WP is specified.
(*5) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP 5C is specified.
1
BOLT
PLATED BOLT
PLATED BOLT
Loctite
- 21 -
2.PERIODIC MAINTENANCE
2.2.5
B-82585EN/02
Grease replacement procedure of the J5/J6-axis reducer
NOTE
Fig. 2.2.5 is an example of standard type.
In case of 5H type, read J5/J6 as J4/J5.
1
2
Turn off the power.
Supply regulated amount grease through the grease inlet by using
injection syringe. Please note that grease might come out
immediately after in the greasing or the greasing. Please note
greasing excessively even in that case.
J6-axis reducer grease inlet
seal bolt
J5-axis reducer grease inlet
seal bolt
Fig. 2.2.5 Replacing grease of the J5/J6-axis reducer (LR Mate 200iC)
Replacing grease of the J4/J5-axis reducer (LR Mate 200iC/5H)
- 22 -
3.TROUBLESHOOTING
B-82585EN/02
3
TROUBLESHOOTING
- 23 -
3.TROUBLESHOOTING
3.1
B-82585EN/02
OVERVIEW
The cause of a failure in the mechanical unit may be difficult to
localize, because failures can arise from many interrelated factors. If
you fail to take the correct measures, the failure may be aggravated.
Therefore, it is necessary to analyze the symptoms of the failure
precisely so that the true cause can be found.
- 24 -
3.TROUBLESHOOTING
B-82585EN/02
3.2
FAILURES, CAUSES AND MEASURES
Table 3.2 lists the major failures that may occur in the mechanical unit
and their probable causes. If you cannot pinpoint a failure cause or
which measures to apply, contact FANUC.
Table 3.2 (a) Failures, causes and measures
Symptom
Description
Vibration
Noise
Cause
Measure
-The J1 base lifts off the floor
plate as the robot operates.
-There is a gap between the
J1 base and floor plate.
-A J1 base retaining bolt is
loose.
[J1 base fastening]
-It is likely that the robot J1 base is not
securely fastened to the floor plate.
-Probable causes are a loose bolt, an
insufficient degree of surface flatness,
or foreign material caught between the
floor plate and floor plate.
-If the robot is not securely fastened to
the floor plate, the J1 base lifts the
floor plate as the robot operates,
allowing the base and floor plates to
strike each other, which, in turn, leads
to vibration.
-If a bolt is loose, apply Loctite
and tighten it to the appropriate
torque.
-Adjust the floor plate surface
flatness to within the specified
tolerance.
-If there is any foreign matter
between the J1 base and floor
plate, remove it.
-Apply epoxy to the floor
surface and re-install the
plate.
[Rack or floor]
-It is likely that the rack or floor is not
sufficiently rigid.
-If the rack or floor is not sufficiently
rigid, reaction from the robot deforms
the rack or floor, leading to vibration.
-Vibration becomes more
serious when the robot adopts
a specific posture.
-If the operating speed of the
robot is reduced, vibration
stops.
-Vibration is most noticeable
when the robot is
accelerating.
-Vibration occurs when two or
more axes operate at the
same time.
[Overload]
-It is likely that the load on the robot is
greater than the maximum rating.
-It is likely that the robot control
program is too demanding for the
robot hardware.
-It is likely that the ACCELERATION
value is excessive.
-Reinforce the rack or floor to
make it more rigid.
-If it is impossible to reinforce
the rack or floor, modify the
robot control program; doing
so might reduce the amount of
vibration.
-Check the maximum load that
the robot can handle once
more. If the robot is found to
be overloaded, reduce the
load, or modify the robot
control program.
-Vibration in a specific portion
can be reduced by modifying
the robot control program while
slowing the robot and reducing
its acceleration (to minimize
the influence on the entire
cycle time).
- 25 -
3.TROUBLESHOOTING
Symptom
Vibration
Noise
(Continued)
B-82585EN/02
Description
Cause
Measure
-Vibration was first noticed
after the robot collided with an
object or the robot was
overloaded for a long period.
-The grease of the vibrating
axis has not been exchanged
for a long period.
[Broken gear, bearing, or reducer]
- It is likely that collision or overload
applied an excessive force on the
drive mechanism, thus damaging the
gear tooth surface or rolling surface of
a bearing, or reducer.
- It is likely that prolonged use of the
robot while overloaded caused fretting
of the gear tooth surface or rolling
surface of a bearing, or reducer due to
resulting metal fatigue.
- It is likely that foreign matter caught
in a gear, bearing, or within a reducer
caused damage on the gear tooth
surface or rolling surface of the
bearing, or reducer.
- It is likely that, because the grease
has not been changed for a long
period, fretting occurred on the gear
tooth surface or rolling surface of a
bearing, or reducer due to metal
fatigue.
-Operate one axis at a time to
determine which axis is
vibrating.
-Remove the motor, and
replace the gear, the bearing,
and the reducer. For the spec.
of parts and the method of
replacement, contact FANUC.
-Using the robot within its
maximum rating prevents
problems with the drive
mechanism.
-Regularly changing the grease
with a specified type can help
prevent problems.
These factors all generate cyclic
vibration and noise.
- 26 -
3.TROUBLESHOOTING
B-82585EN/02
Symptom
Vibration
Noise
(Continued)
Description
Cause
Measure
-The cause of problem cannot
be identified from examination
of the floor, rack, or
mechanical section.
[Controller, cable, and motor]
-If a failure occurs in a controller
circuit, preventing control commands
from being supplied to the motor
normally, or preventing motor
information from being sent to the
controller normally, vibration might
occur.
-If the pulse coder develops a fault,
vibration might occur because
information about the motor position
cannot be transferred to the controller
accurately.
-If the motor becomes defective,
vibration might occur because the
motor cannot deliver its rated
performance.
-If a power line in a movable cable of
the mechanical section has an
intermittent break, vibration might
occur because the motor cannot
accurately respond to commands.
-If a pulse coder wire in a movable
part of the mechanical section has an
intermittent break, vibration might
occur because commands cannot be
sent to the motor accurately.
-If a connection cable between them
has an intermittent break, vibration
might occur.
-If the power cable between them has
an intermittent break, vibration might
occur.
-If the power source voltage drops
below the rating, vibration might
occur.
-If a robot control parameter is set to
an invalid value, vibration might occur.
-There is a possibility that the belt has
been damaged about the allophone of
the axis of the belt drive.
-Refer to the Controller
Maintenance Manual for
troubleshooting related to the
controller and amplifier.
-Replace the pulse coder for
the motor of the axis that is
vibrating, and check whether
the vibration still occurs.
-Also, replace the motor of the
axis that is vibrating, and
check whether vibration still
occurs. For the method of
replacement, contact FANUC.
-Check that the robot is
supplied with the rated voltage.
-Check whether the sheath of
the power cord is damaged. If
so, replace the power cord,
and check whether vibration
still occurs.
-Check whether the sheath of
the cable connecting the
mechanical section and
controller is damaged. If so,
replace the connection cable,
and check whether vibration
still occurs.
-If vibration occurs only when
the robot assumes a specific
posture, it is likely that a cable
in the mechanical unit is
broken.
-Shake the movable part cable
while the robot is at rest, and
check whether an alarm
occurs. If an alarm or any other
abnormal condition occurs,
replace the mechanical unit
cable.
-Check that the robot control
parameter is set to a valid
value. If it is set to an invalid
value, correct it. Contact
FANUC for further information
if necessary.
-Please exchange it if watching
the cover is opened, an
internal belt is confirmed, and
damage is shown.
- 27 -
3.TROUBLESHOOTING
Symptom
B-82585EN/02
Description
Vibration
-There is some relationship
between the vibration of the
robot and the operation of a
machine near the robot.
Rattling
-While the robot is not
supplied with power, pushing
it with the hand causes part of
the mechanical unit to wobble.
-There is a gap on the
mounting face of the
mechanical unit.
-Backlash is greater than the
tolerance stated in the
applicable maintenance
manual. (See Section 3.3.)
Cause
Measure
[Noise from a nearby machine]
-If the robot is not grounded properly,
electrical noise is induced on the
grounding wire, preventing commands
from being transferred accurately,
thus leading to vibration.
-If the robot is grounded at an
unsuitable point, its grounding
potential becomes unstable, and
noise is likely to be induced on the
grounding line, thus leading to
vibration.
[Mechanical section coupling bolt]
-It is likely that overloading or a
collision has loosened a mounting bolt
in the robot mechanical section.
-Connect the grounding wire
firmly to ensure a reliable
ground potential and prevent
extraneous electrical noise.
[Increase in backlash]
-It is likely that excessive force applied
to the drive mechanism, due to a
collision or overloading, has broken a
gear or the inside of the reducer,
resulting in an increase in the amount
of backlash.
-It is likely that prolonged use has
caused the tooth surfaces of a gear
and the inside of the reducer to wear
out, resulting in an increase in the
amount of backlash.
-It is likely that prolonged use without
changing the grease has caused the
tooth surfaces of a gear and the inside
of the reducer to wear out, resulting in
an increase in the amount of
backlash.
-Operate one axis at a time to
determine which axis has the
increased backlash.
-Remove the motor, and check
whether any of its gears are
broken. If any gear is broken,
replace it.
-Check whether any other gear
of the drive mechanism is
damage. If there is no damage
gear, replace the reducer.
-If the reducer is broken, or if a
gear tooth is missing, replace
the relevant component. Also,
remove all the grease from the
gear box and wash the inside
of the gear box.
-After replacing the gear or
reducer, add an appropriate
amount of grease.
-Using the robot within its
maximum rating prevents
problems with the drive
mechanism.
-Regularly applying the grease
with a specified type can help
prevent problems.
- 28 -
-Check that the following bolts
for each axis are tight. If any of
these bolts is loose, apply
Loctite and tighten it to the
appropriate torque.
-Motor retaining bolt
-Reducer retaining bolt
-Base retaining bolt
-Arm retaining bolt
-Casting retaining bolt
-End effecter retaining bolt
3.TROUBLESHOOTING
B-82585EN/02
Symptom
Motor
overheating
Description
Cause
Measure
-The ambient temperature of
the installation location
increases, causing the motor
to overheat.
-After the robot control
program or the load was
changed, the motor
overheated.
[Ambient temperature]
-It is likely that a rise in the ambient
temperature prevented the motor from
releasing heat efficiently, thus leading
to overheating.
[Operating condition]
-It is likely that the robot was operated
with the maximum average current
exceeded.
-After a control parameter was
changed, the motor
overheated.
[Parameter]
-If data input for a workpiece is invalid,
the robot cannot be accelerated or
decelerated normally, so the average
current increases, leading to
overheating.
[Mechanical section problems]
-It is likely that problems occurred in
the mechanical unit drive mechanism,
thus placing an excessive load on the
motor.
[Motor problems]
-It is likely that a failure of the motor
brake resulted in the motor running
with the brake applied, thus placing an
excessive load on the motor.
-It is likely that a failure of the motor
prevented it from delivering its rated
performance, thus causing an
excessive current to flow through the
motor.
-The teach pendant can be
used to monitor the average
current. Check the average
current when the robot control
program is running. The
allowable average current is
specified for the robot
according to its ambient
temperature. Contact FANUC
for further information.
-Relaxing the robot control
program and conditions can
reduce the average current,
thus preventing overheating.
-Reducing the ambient
temperature is the most
effective means of preventing
overheating.
-Having the surroundings of
the robot well ventilated
enables the robot to release
heat efficiently, thus preventing
overheating. Using a fan to
direct air at the motor is also
effective.
-If there is a source of heat
near the motor, it is advisable
to install shielding to protect
the motor from heat radiation.
-Input an appropriate
parameter as described in
CONTROLLER OPERATOR’S
MANUAL.
-Symptom other than stated
above
- 29 -
-Repair the mechanical unit
while referring to the above
descriptions of vibration, noise,
and rattling.
-Check that, when the servo
system is energized, the brake
is released.
If the brake remains applied to
the motor all the time, replace
the motor.
-If the average current falls
after the motor is replaced, it
indicates that the first motor
was faulty.
3.TROUBLESHOOTING
Symptom
Grease
B-82585EN/02
Description
-Grease is leaking from the
mechanical unit.
Dropping axis -An axis drops because the
brake does not function.
-An axis drops gradually when
it should be at rest.
Cause
Measure
[Poor sealing]
-Probable causes are a crack in the
casting, a broken O-ring, a damaged
oil seal, or a loose seal bolt.
-A crack in a casting can occur due to
excessive force that might be caused
in collision.
-An O-ring can be damaged if it is
trapped or cut during disassembling or
re-assembling.
-An oil seal might be damaged if
extraneous dust scratches the lip of
the oil seal.
-A loose seal bolt might allow grease
to leak along the threads.
-If a crack develops in the
casting, sealant can be used
as a quick-fix to prevent further
grease leakage. However, the
component should be replaced
as soon as possible, because
the crack might extend.
-O-rings are used in the
locations listed below.
-Motor coupling section
-Reducer coupling section
-Wrist coupling section
-J3 arm coupling section
-Inside the wrist
-Oil seals are used in the
locations stated below.
-Inside the reducer
-Inside the wrist
-Seal bolts are used in the
locations stated below.
-Grease drain inlet and outlet
-Check whether the brake drive
relay contacts are stuck to
each other. If they are found to
be stuck, replace the relay.
-If the brake shoe is worn out,
if the brake main body is
damaged, or if oil or grease
has entered the motor, replace
the motor.
[Brake drive relay and motor]
-It is likely that brake drive relay
contacts are stuck to each other to
keep the brake current flowing, thus
preventing the brake from operating
when the motor is deenergized.
-It is likely that the brake shoe has
worn out or the brake main body is
damaged, preventing the brake from
operating efficiently.
-It is likely that oil or grease has
entered the motor, causing the brake
to slip.
- 30 -
3.TROUBLESHOOTING
B-82585EN/02
Symptom
Description
Displacement -The robot operates at a point
other than the taught position.
-The repeatability is not within
the tolerance.
-Displacement occurs only in
a specific peripheral unit.
-Displacement occurred after
a parameter was changed.
BZAL alarm
occurred
-BZAL is displayed on the
controller screen
Cause
Measure
[Mechanical section problems]
-If the repeatability is unstable,
probable causes are a failure in the
drive mechanism or a loose bolt.
-If the repeatability becomes stable, it
is likely that a collision imposed an
excessive load, leading to slipping on
the base surface or the mating
surface of an arm or reducer.
-It is likely that the pulse coder is
abnormal.
-If the repeatability is unstable,
repair the mechanical section
by referring to the above
descriptions of vibration, noise,
and rattling.
-If the repeatability is stable,
correct the taught program.
Variation will not occur unless
another collision occurs.
-If the pulse coder is abnormal,
replace the motor or the pulse
coder.
-Correct the setting of the
peripheral unit position.
-Correct the taught program.
[Peripheral unit displacement]
-It is likely that an external force was
applied to the peripheral unit, thus
shifting its position relative to the
robot.
[Parameter]
-It is likely that the mastering data was
rewritten in such a way that the robot
origin was shifted.
- It is likely that the voltage of the
memory backup battery is low.
- It is likely that the pulse coder cable
is defected.
-Re-enter the previous
mastering data, which is known
to be correct.
-If correct mastering data is
unavailable, perform mastering
again.
-Replace the battery.
-Replace the cable.
Table 3.2 (b) Allowable drops
At power off
At emergency stop
2 mm
2 mm
NOTE
Each value indicates the amount by which an end
effector mounting surface may fall.
- 31 -
3.TROUBLESHOOTING
3.3
B-82585EN/02
BACKLASH MEASUREMENT
Measurement method
1
2
3
Maintain the robot in a specified posture. (See Table 3.3.)
Apply positive and negative loads to each axis as shown in Fig.3.3
(a).
Remove the loads and measure the displacement.
Measure backlash by applying positive and negative loads to each axis
three times.
Average the values measured in the last two
measurements for each axis, and use the averages as a measured
backlash for the respective axes.
Stop position
0
+3kg
Firtst step
(Do not measure)
-3kg
+3kg
L1
-3kg
0kg
L2
0kg
+3kg
0kg
L3
-3kg
Second step
(B2 =L 1+ L2)
Third step
(B3=L 3+ L4)
0kg
L4
Fig. 3.3 (a) Backlash measurement method
Backlash B is calculated using the following expression:
B=
B2 + B3
2
- 32 -
3.TROUBLESHOOTING
B-82585EN/02
Table 3.3(a) Backlash measurement posture, position and permissible value
Measurement
position
Measurement
J1-axis J2-axis J3-axis J4-axis J5-axis J6-axis
axis
J1-axis
Arbitrary
90°
0°
0°
0°
90°
J2-axis
Arbitrary
0°
90°
0°
0°
0°
J3-axis
Arbitrary
90°
-90°
0°
0°
180°
J4-axis
Arbitrary
0°
90°
0°
-90°
90°
J5-axis
Arbitrary
90°
0°
0°
-90°
J6-axis
Arbitrary
90°
0°
0°
-90°
0° or
180°
90° or
-90°
Rotation center of
J5-axis
Rotation center of
J3-axis of J2 arm
Rotation center of
J5-axis
100mm from rotation
center of J4-axis
206mm from rotation
center of J5-axis
100mm from rotation
center of J6-axis
Table 3.3(b) Distance at axis and measurement position and permissible value for backlash
Measured Distance at axis and measurement position
axis
(mm)
Permissible value (mm)
LR Mate 200iC,
LR Mate 200iC,
LR Mate 200iC/5C, LR Mate 200iC/5L,5LC LR Mate 200iC/5C, LR Mate 200iC/5L,5LC
5WP,5H
5WP,5H
J1-axis
695
885
0.40
0.51
J2-axis
300
400
0.17
0.23
J3-axis
320
410
0.19
0.24
J4-axis
100
100
0.16
0.16
J5-axis
180
180
0.18
0.18
J6-axis
100
100
0.15
0.15
NOTE
In case of 5H type, read J5/J6 as J4/J5.
100
Loading position
Measurement position
(Rotation center of J5-axis)
Fig.3.3 (b) Backlash measurement position of J1-axis
- 33 -
3.TROUBLESHOOTING
B-82585EN/02
Loading
position
Measurement
position
Fig.3.3(c) Backlash measurement position of J2-axis
100
Measurement
position
100
Loading
position
Fig.3.3 (d) Backlash measurement position of J3-axis
- 34 -
3.TROUBLESHOOTING
B-82585EN/02
Rotation center of
J4-axis (J6-axis)
100
Loading position
Measurement position
100
Fig.3.3 (e) Backlash measurement position of J4-axis
Measurement
position
Loading
position
100
100
Fig.3.3 (f) Backlash measurement position of J5-axis
Loading position
Measurement position
Fig.3.3 (g) Backlash measurement position of J6-axis
- 35 -
4.REPLACING PARTS
4
B-82585EN/02
REPLACING PARTS
–
–
–
–
When replacing a part, subsequent adjustment is required.
When removing or mounting a motor, apply force in the direction
of the shaft only. If excessive force is applied in any other
direction, the motor and/or reducer may be damaged.
If a motor and associated parts to be assembled incur a phase
mismatch, assembly might prove impossible. Carefully check the
state of the parts before removing them.
Assemble a new O–ring and packing for seal securing after you
exchange parts for spec of seal.
CAUTION
The packing must not be reused. To maintain dust
and drip preventive effects, replace the old packing
with new ones and then perform assembly.
–
To secure the performance of the seal, replace seal bolt to new one
after replacing parts as much as possible. If it is not possible to
prepare it, peel off the sealant, spread Loctite on the internal
thread, and recycle.
NOTE
When applying Loctite to the important bolt
tighteningpoints, make sure that it is applied to the
entire longitudinal portion in the engaging section of
the female threads. If it is applied to the male threads,
the bolts may be loosened because sufficient effects
cannot be obtained. Remove the dust within the bolts
and taps and wipe oil off the engaging section. Make
sure that there is no solvent in the taps.
–
–
–
–
–
When tightening a bolt, always observe the tightening torque, if
specified those bolts for which no tightening torque is specified
must be tightened according to the table of APPENDIX.
Assemble the reducer to the vertical direction as much as possible
when you assemble it.
When installing bolt to reducer, make the applying order a corner
and tighten uniformly.
When applying Loctite 518 to reducer, pay attention Loctite
doesn’t enter inside the reducer.
Spread it after softening grease mixing it when you do not softly
spread grease easily.
- 36 -
4.REPLACING PARTS
B-82585EN/02
NOTE
The following abbreviations are used herein.
STANDARD : LR Mate 200iC
5L
: LR Mate 200iC/5L
5LC
: LR Mate 200iC/5LC
5C
: LR Mate 200iC/5C
5WP
: LR Mate 200iC/5WP
5H
: LR Mate 200iC/5H
- 37 -
4.REPLACING PARTS
4.1
B-82585EN/02
FIGURE OF DRIVE MECHANISM
The drive mechanisms of each axis are shown in the following.
CAUTION
When robot is 5H,please read J5/J6 as J4/J5.
J2 AXIS BASE
PIPE
J1 AXIS REDUCER
(HOLLOW SHAFT)
OUTPUT GEAR
INPUT GEAR
J1 AXIS BASE
MOTOR (M1) FOR J1 AXIS
Fig. 4.1 (a) Drive mechanism of J1-axis
- 38 -
4.REPLACING PARTS
B-82585EN/02
J2 AXIS ARM
J2 AXIS REDUCER
J2 AXIS BASE
MOTOR (M2) FOR J2 AXIS
Fig. 4.1 (b) Drive mechanism of J2-axis
J3 AXIS HOUSING
J3 AXIS REDUCER
J3 AXIS OUTPUT PULLY
J2 AXIS ARM
BELT
MOTOR (M3) FOR J3 AXIS
J3 AXIS INPUT PULLY
Fig. 4.1 (c) Drive mechanism of J3-axis
- 39 -
4.REPLACING PARTS
B-82585EN/02
J4 AXIS OUTPUT GEAR
J4 AIXS REDUCER
PIPE
J3 AIXS ARM
MOTOR (M4) FOR J4 AXIS
J4 AXIS INPUT GEAR
J3 AXIS HOUSING
Fig. 4.1 (d) Drive mechanism of J4-axis
J5 AXIS OUTPUT PULLY
J5 AXIS INPUT PULLY
MOTOR (M5) FOR J5 AXIS
J5 AXIS REDUCER
BELT
J6 AXIS OUTPUT GEAR
J3 AIXS ARM
J6 AXIS REDUCER
J6 AXIS INPUT GEAR
BELT
MOTOR (M5) FOR J5 AXIS
J6 AXIS OUTPUT PULLY
J6 AXIS INPUT PULLY
J6 AXIS HOUSING
Fig. 4.1 (e) Drive mechanism of J5/J6-axis
- 40 -
4.REPLACING PARTS
B-82585EN/02
4.2
REPLACING J1-AXIS MOTOR
Replacing procedure
1
2
3
4
5
6
7
8
9
10
Move the robot posture to J1=90° and J2=-90°.
Remove robot from floor plate, and turn off the power of the
controller.
Make it to posture in which the motor (2) can be removed.
When severe dust/liquid protection specification of LR Mate
200iC, LR Mate 200iC/5L, 5H or LR Mate 200iC/5LC, 5WP, 5C
is specified, remove plated bolt (12), cover B (11) and packing
(13). (When not severe dust/liquid protection specification of LR
Mate 200iC,LR Mate 200iC/5L,5H is specified, there are not.)
Remove bolt (1) and motor (2). In this time, note that there is a
possibility that grease goes out.
Remove cable K101 from motor (1).
Wipe the grease of the gear off. In this time, pay attention not to
damage the tooth side.
Remove O-ring (3) and seal bolt (4), and remove washer plate (5),
gear (6), holder (7), O-ring (8) and key (9) sequentially.
Assemble it in the opposite procedure after exchanging Motor,
packing and O-ring for the new article. In this time, pay attention
to the following.
- When motor is attached, confirm the thing that the oil seal is at
the position, and note that the lip cannot be turned over.
- Spread grease on surroundings about the gear.
Perform mastering (See subsection 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
- 41 -
4.REPLACING PARTS
B-82585EN/02
13
12
11
9
8
7
5
4
3
10
6
2
1
A
VIEW A
Fig. 4.2 Replacing J1-axis motor
Parts Name
1
2
3
4
5
Specifications
Number
BOLT
MOTOR
O-RING
SEAL BOLT
WASHER PLATE
Loctite
Torque N-m (kgf-cm)
A6-BA-5X20
4
A06B-0116-B855#0048
1
A98L-0001-0347#S46
1
A97L-0218-0423#030606
3
1.3Nm (13kgfcm)
A290-7139-X231
1
A290-7139-X211(*1)
1
6 GEAR J1-1
A290-7139-X213(*2)
1
7 HOLDER
A290-7139-X221
1
8 O-RING
A98L-0001-0347#S46
1
9 KEY
JB-HKY-3X3X12B
1
10 OIL SEAL
A98L-0040-0223#01001805
1
A290-7139-X233 (*3)
1
11 COVER B
A290-7139-Y233 (*4)
1
PLATED BOLT
A97L-0218-0496#M4X8BC (*3)
9
4.5Nm (46kgfcm)
12
PLATED BOLT
A97L-0218-0496#M4X8EN (*4)
9
4.5Nm (46kgfcm)
13 PACKING
A290-7139-X252 (*5)
1
(*1) When LR Mate 200iC,LR Mate 200iC/5C,5WP,5H is specified.
(*2 )When LR Mate 200iC/5L,5LC is specified.
(*3) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*4) When LR Mate 200iC/5LC,5WP,5C is specified.
(*5) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H
or LR Mate 200iC/5LC,5WP 5C is specified.
- 42 -
4.REPLACING PARTS
B-82585EN/02
4.3
REPLACING J1-AXIS REDUCER
Replacing procedure
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Turn off the power of the controller.
Remove cover B (When severe dust/liquid protection specification
of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.) and J1 motor referring to 4.2.
(The gear need not be removed.)
Remove bolt/plated bolt (5), J2 base cover (6) and sponge (7).
When packing is attached, remove packing (19), too.
Remove the connector that relays cable K101 and cable K102,
K103, K104, K105, K106, K107 and K108 referring to Fig.5.3.1
(b) in Section 5.
Remove bolt/seal bolt (1) and cover U (2). When packing is
attached, remove packing (18), too.
Pull out cable K101 to the J1 base side. In this time, pull out the
cable after it pushes into the pipe on the tip of the part of the
relayed connector and it passes it. Do not pull it out forcibly with
the relayed connector caught.
Remove bolt (3), (4) and remove J1 base (17) by using tap for
pulled out. In this time, pay attention that there is a possibility that
grease goes out. (Refer to Fig.4.3(d))
Wipe the grease of the gear (13) off. In this time, do not damage
the tooth side.
Remove bolt/seal bolt (14) and reducer (10).
Remove seal bolt (12) and gear (13).
Assemble the gear (13) to wave generator (11) of the new reducer
(10).
Keep the horizontal and install a new main body of the reducer in
J2 base. In this time, put O-ring (8) without forgetting after it
exchanges it for the new article.
Fill grease to the reducer. It is total 19ml greasing in inside of
reducer, gear and bearing of wave generator.
When severe dust/liquid protection specification of LR Mate
200iC, LR Mate 200iC/5L,5H or LR Mate 200iC/5LC,5WP,5C is
specified, spread the sealant on the reducer referring to Fig.4.3
(b).
Attach new wave generator (11) to the reducer. In this time, put
wave washer (9) without forgetting.
Phase to reducer and assemble J1 base (17) referring to Fig.4.2(c).
In this time, put O-ring (15) without forgetting. Assemble bolt (4)
after previously assembling all bolt (3).
Put J1 motor, cable and cover in the reverse order of 2-6.
CAUTION
Do not apply grease to the O-ring (15).
Otherwise, hardening of sealant is prevented,
causing a grease leak.
- 43 -
4.REPLACING PARTS
B-82585EN/02
18 Pass the cable K101 through J2 base side, and connect it with the
relay connector. In this time, pull out the cable after it pushes into
the pipe on the tip of the part of the relayed connector and it
passes it. Do not pull it out forcibly with the relayed connector
caught.
19 Attach J2 base cover (6) by bolt/plated bolt (5) after sponge (7) is
attached inside of J2 base. When severe dust/liquid protection
specification is specified, replace packing (19) to new one, and
attach it.
20 Attach J1 motor referring to Section 4.2.
21 When severe dust/liquid protection specification of LR Mate
200iC, LR Mate 200iC/5L,5H or LR Mate 200iC/5LC,5WP,5C is
specified, attach cover B.
22 Attach robot to floor plate.
23 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
- 44 -
4.REPLACING PARTS
B-82585EN/02
1
2
18
5
19
8
7
9
10
11
12
13
15
16
14
17
4
3
Fig. 4.3 (a) Replacing J1-axis reducer
- 45 -
6
4.REPLACING PARTS
Parts Name
BOLT
1 SEAL BOLT
SEAL BOLT
2 COVER U
3 BOLT
4 BOLT
BOLT
5 PLATED BOLT
PLATED BOLT
6 J2 BASE COVER
7 SPONGE
8 O-RING
9 WAVE-WASHER
10 J1 REDUCER
11
12
13
WAVE
GENERATOR
SEAL BOLT
GEAR J1-2
BOLT
SEAL BOLT
SEAL BOLT
O-RING
J1 RING
B-82585EN/02
Specifications
Number
A6-BA-4X8(*1)
A97L-0218-0546#040808BC(*2)
A97L-0218-0546#040808EN(*3)
A290-7139-X332
A6-BA-4X12
A6-BA-4X20
A97L-0218-0504#M4X10(*1)
A97L-0218-0496#M4X12BC (*2)
A97L-0218-0496#M4X12EN (*3)
A290-7139-X305(*1)
A290-7139-X307 (*2)
A290-7139-Y307 (*5)
A290-7139-Z307 (*6)
A290-7139-X346
(Attached to J1 REDUCER)
(Attached to J1 REDUCER)
A97L-0218-0812#80(*4)
A97L-0218-0812#80C(*3)
4
4
4
1
7
9
3
8
8
1
1
1
1
1
1
1
1
1
(Attached to J1 REDUCER)
1
Loctite
Torque N-m (kgf-cm)
4.5Nm (46kgfcm)
4.5Nm (46kgfcm)
4.5Nm (46kgfcm)
4.5Nm (46kgfcm)
2.0Nm (20kgfcm)
4.5Nm (46kgfcm)
4.5Nm (46kgfcm)
A97L-0218-0423#030505
6
A290-7139-X212
1
A6-BA-4X30(*1)
12
5.4Nm (55kgfcm)
14
A97L-0218-0546#043016BC(*2)
12
5.4Nm (55kgfcm)
A97L-0218-0546#043016EN(*3)
12
5.4Nm (55kgfcm)
15
(Attached to J1 REDUCER)
1
16
A290-7139-X241
1
A290-7139-X201(*4)
1
17 J1 BASE
A290-7139-Y201(*5)
1
A290-7139-Z201(*6)
1
18 PACKING
A290-7139-X356 (*7)
1
19 PACKING
A290-7139-X354 (*7)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*5) When LR Mate 200iC/5LC,5C is specified.
(*6) When LR Mate 200iC/5WP is specified.
(*7) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 46 -
4.REPLACING PARTS
B-82585EN/02
APPLY LOCTITE 518 TO THE
PART
OF THE J1 BASE SIDE.
DON'T PUT LOCTITE INSIDE THE REDUCER.
Fig. 4.3 (b) Range to J1-axis reducer of sealant spreading
(When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.)
- 47 -
4.REPLACING PARTS
B-82585EN/02
M4X20
M4X12
Fig. 4.3 (c) Assembled phase of J1-axis reducer
M4 tap for pulled out
(2 places)
Fig. 4.3 (d) Position of taps for pulled out to remove J1 base.
- 48 -
4.REPLACING PARTS
B-82585EN/02
4.4
REPLACING J2-AXIS MOTOR
Replacing procedure
1
2
3
4
5
6
7
8
9
Turn off the power of the controller.
Remove bolt/plated bolt (1) and J2 base cover (2). When packing
is attached, remove packing (19), too.
Remove sponge (3).
Cut the nylon band, which connect cable and clamp (5).
Remove the connector that relays cable K101 and cable K102,
K103, K104, K105, K106, K107 and K108 referring to Fig.5.3.1
(b) in Section 5.
Remove bolt (4) and clamp (5).
Remove bolt (6) and support (7). When packing is attached,
remove packing (20), too.
Remove seal bolt (8) and (9), cover S (10), packing (21). In this
time, pay attention that there is a possibility that grease goes out.
Remove seal bolt (11), washer (12), wave generator (18), O-ring
(17), key (16) and Motor (14) to which shaft (15) attaches.
CAUTION
When the motor is removed, the arm moves
downward by its weight. Hold the arm so that the
arm does not collide with any other objects.
10 Remove cable K102 and K103 from motor (14).
11 Assemble it in the opposite procedure after exchanging Motor,
O-ring, packing and shaft (15) for the new article. In this time, pay
attention to the following.
・Spread Loctite 638 referring to Fig.4.4(b) when you apply
shaft(15).
・Be sure to attach wave generator(18) after attaching motor(14).
Spread grease inside of reducer.
・Pay attention the phase when you apply the cover S (10)
referring to Fig.4.4(c).
12 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
- 49 -
4.REPLACING PARTS
B-82585EN/02
9
8
10
11
12
21
18
17
16
15
20
14
13
7
5
4
6
3
19
2
1
Fig. 4.4(a) Replacing J2-axis motor
- 50 -
4.REPLACING PARTS
B-82585EN/02
Parts Name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10(*1)
3
2.0Nm (20kgfcm)
A97L-0218-0496#M4X12BC (*2)
8
4.5Nm (46kgfcm)
A97L-0218-0496#M4X12EN (*3)
8
4.5Nm (46kgfcm)
A290-7139-X305(*1)
1
A290-7139-X307 (*2)
1
2 J2 BASE COVER
A290-7139-Y307 (*4)
1
A290-7139-Z307 (*5)
1
3 SPONGE
A290-7139-X346
1
4 BOLT
A6-BA-4X8
2
5 CLAMP J2-1
A290-7139-X333
1
6 SEAL BOLT
A97L-0218-0423#041212
7
4.5Nm (46kgfcm)
A290-7139-X303(*6)
1
7 SUPPORT
A290-7139-Y303(*4)
1
A290-7139-Z303(*5)
1
SEAL BOLT
A97L-0218-0595#040808BC(*6)
2
2.0Nm (20kgfcm)
8
SEAL BOLT
A97L-0218-0595#040808EN(*3)
2
2.0Nm (20kgfcm)
SEAL BOLT
A97L-0218-0738#040808BC(*6)
2
2.0Nm (20kgfcm)
9
SEAL BOLT
A97L-0218-0738#040808EN(*3)
2
2.0Nm (20kgfcm)
A290-7139-X309(*6)
1
10 COVER S
A290-7139-Y309(*4)
1
A290-7139-Z309(*5)
1
11 SEAL BOLT
A97L-0218-0423#031616
1
1.3Nm (13kgfcm)
12 WASHER
A290-7210-X532
1
13 SEAL BOLT
A97L-0218-0423#051212
4
14 MOTOR
A06B-0116-B855#0048
1
15 SHAFT
A290-7139-X322
1
LT638
16 KEY
JB-HKY-3X3X12B
1
17 O RING
JB-OR1A-G45
4
18 WAVE GENERATOR (Attached to J2 REDUCER)
1
19 PACKING
A290-7139-X354 (*7)
1
20 PACKING
A290-7139-X352 (*7)
1
21 PACKING
A290-7139-X351
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*7)When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 51 -
4.REPLACING PARTS
B-82585EN/02
Spread grease on the inside diameter..
A
A
VIEW A
Fig. 4.4(b) Apply Loctite 638 to shaft
A97L-0218-0738#040808BC(LR Mate 200iC,LR Mate 200iC/5L,5H)
A97L-0218-0738#040808EN(LR Mate 200iC/5C,5LC,5WP)
注)取付位相に注意のこと
NOTE) PAY ATTENTION TO
THE ASSEMBLED PHASE
A97L-0218-0595#040808BC(LR Mate 200iC,LR Mate 200iC/5L,5H)
A97L-0218-0595#040808EN(LR Mate 200i/5C,5LC,5WP)
Fig. 4.4(c) Assembled phase of cover S and bolt
- 52 -
4.REPLACING PARTS
B-82585EN/02
4.5
REPLACING J2-AXIS REDUCER
Replacing procedure
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Turn off the power of the controller.
Remove the robot from floor plate and knock down it sidewise.
Remove bolt/plated bolt (1), J2 base cover (2) and sponge (3).
When packing is attached, remove packing (25), too.
Remove the connector that relays cable K101 and cable K102,
K103, K104, K105, K106, K107 and K108 referring to Fig.5.3.1
(b) in Section 5.
Remove bolt (5) and clamp (4).
Cut the nylon band, which connect cable and clamp.
Remove bolt (6) and support (7). When severe dust/liquid
protection specification is specified, remove packing (26), too.
Remove seal bolt (8) and (9), cover S (10) and packing (11). In
this time, pay attention that there is a possibility that grease goes
out.
Remove seal bolt (12), washer (13) and wave generator (14).
Remove seal bolt (19), motor (18) and O-ring (20), (21).
Remove bolt/seal bolt (15) and J2 arm (17) to which reducer (24)
is attached.
Remove bolt (22) and remove reducer (24) from J2 arm (17).
Exchange reducer, O-ring, packing (when severe dust/liquid
protection is specified) for new parts in the following order.
Attach new reducer to the J2 arm (17) by using bolt/seal bolt (22).
When severe dust/liquid protection specification of LR Mate
200iC, LR Mate 200iC/5L,5H or LR Mate 200iC/5LC,5WP,5C is
specified, spread the sealant on the reducer referring to Fig.4.5
(b).
CAUTION
Do not apply grease to the O-ring (23).
Otherwise, hardening of sealant is prevented,
causing a grease leak.
15 Attach J2 motor (18) to the J2 arm. Be sure to make the
decelerator the horizontal about the procedure of 16 and 17.
16 Attach J2 base (16) to the reducer (24) by using bolt/seal bolt (22).
In this time, put O-ring (23) without forgetting.
17 Fill grease to the reducer. It is total 26ml greasing in inside of
reducer, gear and bearing of wave generator.
18 Attach wave generator (14) to the J2 base (16).
19 Attach cover S (10). In this time, pay attention to the phase
referring to Fig.4.4(c).
20 Attach support (7) by using bolt (6). When packing is attached, be
sure to replace packing (26) to new one and attach there.
21 Fix cable to the clamp (4) by using nylon band, attach support (7)
by using bolt (5)
- 53 -
4.REPLACING PARTS
B-82585EN/02
22 Attach J2 base cover (2) by using bolt/plated bolt (1). In this time,
put sponge (3) without forgetting, be sure to replace packing (25)
to new one and attach there.
23 Attach robot to floor plate.
24 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
9
8
10
11
12
13
14
15
16
22
23
24
21
20
26
19
18
7
5
6
3
4
25
2
1
Fig. 4.5(a) Replacing J2-axis reducer
- 54 -
17
4.REPLACING PARTS
B-82585EN/02
Parts Name
BOLT
1 PLATED BOLT
PLATED BOLT
2 J2 BASE COVER
3
4
5
6
SPONGE
CLAMP J2-1
BOLT
SEAL BOLT
7 SUPPORT
SEAL BOLT
SEAL BOLT
SEAL BOLT
9
SEAL BOLT
8
10 COVER S
11 PACKING
12 SEAL BOLT
13 WASHER
Specifications
Number
A97L-0218-0504#M4X10(*1)
A97L-0218-0496#M4X12BC (*2)
A97L-0218-0496#M4X12EN (*3)
A290-7139-X305(*1)
A290-7139-X307 (*2)
A290-7139-Y307 (*4)
A290-7139-Z307 (*5)
A290-7139-X346
A290-7139-X333
A6-BA-4X8
A97L-0218-0423#041212
A290-7139-X303(*6)
A290-7139-Y303(*4)
A290-7139-Z303(*5)
A97L-0218-0595#040808BC(*6)
A97L-0218-0595#040808EN(*3)
A97L-0218-0738#040808BC(*6)
A97L-0218-0738#040808EN(*3)
A290-7139-X309(*6)
A290-7139-Y309(*4)
A290-7139-Z309(*5)
A290-7139-X351
A97L-0218-0423#031616
A290-7210-X532
3
8
8
1
1
1
1
1
1
2
7
1
1
1
2
2
2
2
1
1
1
1
1
1
14 WAVE GENERATOR (Attached to J2 REDUCER)
1
15 BOLT
16
1
1
1
1
1
1
1
1
1
4
1
1
12
12
12
1
1
1
1
1
16 J2 BASE
17 J2 ARM
18
19
20
21
MOTOR
SEAL BOLT
O RING
O RING
BOLT
22 SEAL BOLT
SEAL BOLT
23 O RING
24 J2 REDUCER
25 PACKING
26 PACKING
A6-BA-4X20
A290-7139-X301(*6)
A290-7139-Y301(*4)
A290-7139-Z301(*5)
A290-7139-X302 (*7)
A290-7139-X310(*8)
A290-7139-Y302(*9)
A290-7139-Y310(*10)
A290-7139-Z302(*5)
A06B-0116-B855#0048
A97L-0218-0423#051212
JB-OR1A-G45
(Attached to J2 REDUCER)
A6-BA-4X35
A97L-0218-0546#043516BC(*6)
A97L-0218-0546#043516EN(*3)
(Attached to J2 REDUCER)
A97L-0218-0813#120(*11)
A97L-0218-0813#120C(*3)
A290-7139-X354 (*11)
A290-7139-X352 (*11)
- 55 -
Loctite
Torque N-m (kgf-cm)
2.0Nm (20kgfcm)
4.5Nm (46kgfcm)
4.5Nm (46kgfcm)
4.5Nm (46kgfcm)
2.0Nm (20kgfcm)
2.0Nm (20kgfcm)
2.0Nm (20kgfcm)
2.0Nm (20kgfcm)
1.3Nm (13kgfcm)
5.4Nm (55kgfcm)
5.4Nm (55kgfcm)
5.4Nm (55kgfcm)
4.REPLACING PARTS
B-82585EN/02
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When LR Mate 200iC, LR Mate 200iC/5H,5L is specified.
(*7) When LR Mate 200iC, LR Mate 200iC/5H is specified.
(*8) When LR Mate 200iC/5L is specified.
(*9) When LR Mate 200iC/5C is specified.
(*10) When LR Mate 200iC/5LC is specified.
(*11)When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
APPLY LOCTITE 518 TO THE
PART
OF THE COVER S SIDE.
DON'T PUT LOCTITE INSIDE THE REDUCER.
Fig. 4.5 (b) Range to J2-axis reducer of sealant spreading
(When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.)
- 56 -
4.REPLACING PARTS
B-82585EN/02
4.6
REPLACING J3-AXIS MOTOR
Replacing procedure
1
2
3
Turn off the power of the controller.
Remove bolt/plated bolt (3) and J2 arm cover (4). When packing
is attached, remove packing (14), too.
Loosen a bolt (6) a little and lower the tension of the belt (5) and
remove belt (5).
CAUTION
When removing the belt, put the part beyond the
J3 housing on a workbench to prevent the arm
from dropping
4
5
6
7
8
9
10
11
12
13
According to Section 5.3.1, remove J2 base cover and relay of
cable K101 and air tube. (Referring to Fig.5.3.1 (a), (b))
According to Section 5.3.1, remove clamp J2-1 and cut the nylon
band, which connect cable and air tube to clamp. (Referring to
Fig.5.3.1 (a), (b))
Remove seal bolt (1) and guide arm (2). Do not add power
forcibly when you remove guide arm. When packing is attached,
remove packing (13), too. Pay attention that the load doesn’t rest
upon cable and air tube so that an upper cable and the air tube
may work from guide arm without removing.
Remove clamp J2-2 referring to Fig.5.3.2 (e) of Section 5.3.2. (It
is not necessary to cut nylon band.)
Pull lower cable from guide arm from J2 base to guide arm.
In this time, pull out the cable after it pushes into the robot on the
tip of the part of the relayed connector and it passes it.
Remove bolt (12) and motor (11).
Remove seal bolt (7), washer plate (8) and pulley (9).
Remove cable K104 and K105 from motor (11).
Assemble it in the opposite procedure after exchanging Motor and
packing for the new article. In this time, pay attention to the
following.
・ Adjust the tension of the belt referring to Section 6.1 after the
installation of the belt.
・ When installing guide arm, assemble it horizontally so as not
to damage oil seal.
Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
- 57 -
4.REPLACING PARTS
B-82585EN/02
3 4
VIEW
5
2
6
7
9
8
14
11
12 13
10
1
Fig. 4.6 Replacing J3-axis motor
Parts Name
Specifications
Number
Loctite
Torque N-m (kgf-cm)
A97L-0218-0423#051616(*1)
4
5.6Nm (57kgfcm)
A97L-0218-0546#051616BC(*2)
4
5.6Nm (57kgfcm)
A97L-0218-0546#051616EN(*3)
4
5.6Nm (57kgfcm)
2 GUIDE ARM
A290-7139-X304
1
BOLT
A97L-0218-0504#M4X10 (*1)
3
2.0Nm (20kgfcm)
3 PLATED BOLT
A97L-0218-0496#M4X12BC (*2)
8
4.5Nm (46kgfcm)
PLATED BOLT
A97L-0218-0496#M4X12EN (*3)
8
4.5Nm (46kgfcm)
A290-7139-X306 (*4)
1
A290-7139-X308 (*2)
1
4 J2 ARM COVER
A290-7139-Y308 (*5)
1
A290-7139-Z308 (*6)
1
5 BELT
A98L-0040-0190#007-098
1
6 BOLT
A97L-0218-0504#M5X12
3
5.6Nm (57kgfcm)
7 SEAL BOLT
A97L-0218-0423#030606
3
8 WASHER PLATE
A290-7139-X231
1
9 PULLEY
A290-7139-X311
1
10 KEY
JB-HKY-3X3X12B
1
11 MOTOR
A06B-0115-B855#0048
1
12 BOLT
A6-BA-5X12
4
13 PACKING
A290-7139-X353 (*7)
1
14 PACKING
A290-7139-X355 (*7)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC,LR Mate 200iC/5H,5Lis specified
(*5) When LR Mate 200iC/5LC,5C is specified.
(*6) When LR Mate 200iC/5WP is specified.
(*7)When severe dust/liquid protection specification of LR Mate 200iC,LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP 5C is specified.
1 SEAL BOLT
- 58 -
4.REPLACING PARTS
B-82585EN/02
4.7
REPLACING J3-AXIS REDUCER
Replacing procedure
1
2
3
Turn off the power of the controller.
Remove guide arm referring to Section 4.6.
Remove J2 arm cover and belt referring to section 4.6.
CAUTION
When removing the belt, put the part beyond the
J3 housing on a workbench to prevent the arm
from dropping
4
5
Remove seal bolt (1), washer (2) and pulley (3).
Remove bolt (4) andJ2 arm to which reducer (8) attach. Note that
there is a possibility that grease goes out.
6 Remove bolt/seal bolt (6) and reducer (8).
7 Replace reducer to new one and install to J3 arm unit horizontally.
In this time, put wave washer (10) and O-ring (9) without
forgetting.
8 Fill grease to the reducer. It is total 10ml greasing in inside of
reducer, gear and bearing of wave generator
9 Attach wave generator (7) to reducer.
10 When severe dust/liquid protection specification of LR Mate
200iC, LR Mate 200iC/5L,5H or LR Mate 200iC/5LC,5WP,5C is
specified, spread sealant to the reducer referring to Fig.4.7 (b)
11 Attach J3 arm unit to which reducer attach to the J2 arm. In this
time, put O-ring (11) without forgetting.
CAUTION
Do not apply grease to the O-ring (11).
Otherwise, hardening of sealant is prevented,
causing a grease leak.
12 Install pulley (3) and belt.
13 Adjust the tension of the belt referring to Section 6.1 after the
installation of the belt.
14 Install J2 arm cover referring to Section 4.6.
15 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
- 59 -
4.REPLACING PARTS
B-82585EN/02
1
2
3
4
11
5
7
6
8
9
10
Fig. 4.7(a) Replacing J3-axis reducer
- 60 -
12
4.REPLACING PARTS
B-82585EN/02
Parts Name
Specifications
Number
Loctite
Torque N-m (kgf-cm)
1
2
3
4
5
SEAL BOLT
WASHER
PULLEY
BOLT
KEY
BOLT
6 SEAL BOLT
SEAL BOLT
7 WAVE GENERATOR
A97L-0218-0423#030606
1
1.3Nm (13kgfcm)
A290-7210-X532
1
A290-7139-X312
1
A6-BA-3X16
16
2.0Nm (20kgfcm)
(Attached to J3 REDUCER)
1
A6-BA-3X25(*1)
12
2.0Nm (20kgfcm)
A97L-0218-0546#032504BC(*2)
12
2.0Nm (20kgfcm)
A97L-0218-0546#032504EN(*3)
12
2.0Nm (20kgfcm)
(Attached to J3 REDUCER)
1
A97L-0218-0814#100 (*4)
1
8 J3 REDUCER
A97L-0218-0814#100C (*3)
1
9 O-RING
(Attached to J3 REDUCER)
1
10 WAVE WASHER
(Attached to J3 REDUCER)
1
11 O-RING
(Attached to J3 REDUCER)
1
A290-7139-X401 (*4)
1
12 J3 HOUSING
A290-7139-Y401 (*5)
1
A290-7139-Z401 (*6)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC, LR Mate 200iC/5H,5L is specified
(*5) When LR Mate 200iC/5LC,5C is specified.
(*6) When LR Mate 200iC/5WP is specified.
APPLY LOCTITE 518 TO THE
PART
OF THE PULLEY SIDE.
DON'T PUT LOCTITE INSIDE THE REDUCER.
Fig. 4.7 (b) Range to J3-axis reducer of sealant spreading
(When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L or LR Mate
200iC/5C,5LC,5WP is specified)
- 61 -
4.REPLACING PARTS
4.8
B-82585EN/02
REPLACING J4-AXIS MOTOR
Replacing procedure
CAUTION
This section is for standard type. This mechanical
part does't exist in 5H. If you replace J4-axis motor
of 5H, refer to Section 4.10
1
2
3
Turn off the power of the controller.
Remove bolt/plated bolt (1) and J3 cover (2). When packing is
attached, remove packing (13), too.
Remove bolt (12), motor (11) and O-ring (3). Note that there is a
possibility that grease goes out.
CAUTION
When the motor is removed, the J3 arm can be rotated.
Do as the J3arm is put on the stand so that the arm
should not collide with surroundings.
4
5
6
7
8
3
5
Wipe the grease of the gear (6) off. In this time, pay attention not
to damage the tooth side.
Remove cable K107 and K109 from motor (11).
Remove seal bolt (4), washer plate (5), gear (6), key (7), holder
(8) and O-ring (9).
Assemble it in the opposite procedure after exchanging
Motor-ring and packing for the new article.
- Confirm the thing that the oil seal is at the position, and note
that the lip cannot be turned over.
- Spread grease on surroundings of the gear.
Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
1
9
7 10
4
2
12
6
8
Fig. 4.8 Replacing J4-axis motor
- 62 -
11
13
4.REPLACING PARTS
B-82585EN/02
Parts Name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10 (*1)
4
2.0Nm (20kgfcm)
A97L-0218-0496#M4X12BC (*2)
6
2.0Nm (20kgfcm)
A97L-0218-0496#M4X12EN (*3)
6
2.0Nm (20kgfcm)
A290-7139-X404 (*4)
1
A290-7139-X406 (*2)
1
2 J3 COVER
A290-7139-Y406 (*5)
1
A290-7139-Z406 (*6)
1
3 O-RING
A98L-0001-0347#S46
1
4 SEAL BOLT
A97L-0218-0423#030606
3
1.3Nm (13kgfcm)
5 WASHER PLATE
A290-7139-X231
1
6 GEAR J4-1
A290-7139-X411
1
7 KEY
JB-HKY-3X3X12B
1
8 HOLDER
A290-7139-X221
1
9 O-RING
A98L-0001-0347#S46
1
10 OIL SEAL
A98L-0040-0223#01001805
1
No brake
A06B-0114-B205#0048
11 MOTOR
1
With brake
A06B-0114-B855#0048
12 BOLT
A6-BA-5X20
4
13 PACKING
A290-7139-X451 (*7)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC, LR Mate 200iC/5Lis specified
(*5) When LR Mate 200iC/5LC,5C is specified.
(*6) When LR Mate 200iC/5WP is specified.
(*7) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L or LR Mate
200iC/5C,5LC,5WP is specified
- 63 -
4.REPLACING PARTS
4.9
B-82585EN/02
REPLACING J4-AXIS REDUCER
Replacing procedure
CAUTION
This section is for standard type. This mechanical
part does't exist in 5H. If you replace J4-axis
reducer of 5H, refer to Section 4.11.
1
2
3
4
5
6
7
8
9
10
11
Turn off the power of the controller.
Remove J3 arm cover, relay connector and air tube referring to
Section 4.10.
Remove J3 cover and cut the nylon band, which connect cable to
clamp (2) referring to section 4.8.
Pull out the cable of the J3 arm to the J3 casing side through the
pipe. In this time, pull out the cable after it pushes into the pipe on
the tip of the part of the relayed connector and it passes it. Do not
pull it out forcibly with the relayed connector caught.
Remove bolt (1) and clamp (2).
Remove bolt (3), (4) and J3 arm (13). Pay attention not to damage
oil seal. Note that there is a possibility that grease goes out.
Wipe the grease of the gear (12) off. In this time, pay attention not
to damage the tooth side.
Remove bolt/plated bolt (6) and reducer (10).
Remove seal bolt (5) and pipe (9).
Remove seal bolt (7) and gear (12).
Assemble it in the opposite procedure after exchanging reducer
for the new article.
- When installing reducer, spread grease on teeth of Wave
generator, and install O-ring (11) without forgetting. (In case of
J4-axis reducer, wave generator is assembled in reducer when it
is shipped.) Also, pay attention to the phase of bolts referring to
Fig.4.9(c).
- Spread grease on surroundings of the gear.
- When installing reducer to J3 casing apply bolt (3) after
applying all bolt (4).
- When installing J3 arm, confirm the thing that the oil seal (8) is
at the position, and note that the lip cannot be turned over.
- When severe dust/liquid protection specification of LR Mate
200iC, LR Mate 200iC/5L or LR Mate 200iC/5C,5LC,5WP is
specified, spread sealant to the each part referring to Fig.4.9 (b).
CAUTION
Do not apply grease to the O-ring (11).
Otherwise, hardening of sealant is prevented,
causing a grease leak.
12 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
- 64 -
4.REPLACING PARTS
B-82585EN/02
6 7
5
9
13
10 11
8
4
3
1
2
12
Fig. 4.9(a) Replacing J4-axis reducer
Parts Name
1
2
3
4
5
Specifications
Number
BOLT
CLAMP J4-1
BOLT
BOLT
SEAL BOLT
BOLT
PLATED BOLT
PLATED BOLT
SEAL BOLT
OIL SEAL
PIPE
Loctite
Torque N-m (kgf-cm)
A6-BA-4X8
1
A290-7139-X432
2
A6-BA-3X30
4
2.0Nm (20kgfcm)
A6-BA-3X35
10
2.0Nm (20kgfcm)
A97L-0218-0423#030606
4
1.3Nm (13kgfcm)
A6-BA-3X25(*1)
9
2.0Nm (20kgfcm)
6
A97L-0218-0496#M3X25BC (*2)
9
2.0Nm (20kgfcm)
A97L-0218-0496#M3X25EN (*3)
9
2.0Nm (20kgfcm)
7
A97L-0218-0423#030505
6
1.3Nm (13kgfcm)
8
A98L-0040-0049#02603707
1
9
A290-7139-X421
1
A97L-0218-0815#80(*4)
1
LT518
10 J4 REDUCER
A97L-0218-0815#80C(*3)
1
LT518
11 O-RING
(Attached to J4 REDUCER)
1
12 GEAR J4-2
A290-7139-X412
1
A290-7139-X402(*4)
1
13 J3 ARM 1
A290-7139-Y402(*5)
1
A290-7139-Z402(*6)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC, LR Mate 200iC/5Lis specified
(*5) When LR Mate 200iC/5LC,5C is specified.
(*6) When LR Mate 200iC/5WP is specified.
- 65 -
4.REPLACING PARTS
B-82585EN/02
A
Pipe
・J3 casing side of reducer(*1)
・PIPE
・J3 casing side of J3 arm
Apply Loctite 518 to the
SECTION A-A
(*1)Severe dust/liquid protection specification of
LR Mate 200iC,LR Mate 200iC/5L,5H or
LR Mate 200iC/5C,5LC,5WP
A
Applying area of
LT518
Severe dust/liquid protection specification of
LR Mate 200iC,LR Mate 200iC/5H or
LR Mate 200iC/5C,5WP
or
Severe dust/liquid protection specification of
LR Mate 200iC/5L or LR Mate 200iC/5LC
Fig. 4.9(b) Spread range of sealant
- 66 -
part (*1)
4.REPLACING PARTS
B-82585EN/02
M3X35(10)
M3X30(4)
(M3X35)
Fig. 4.9(c) Spread range of sealant
- 67 -
4.REPLACING PARTS
4.10
B-82585EN/02
REPLACING J5-AXIS MOTOR
Replacing procedure
CAUTION
This mechanism becomes J4 axis in 5H. When you
replace part of 5H, read J5/J6 as J4/J5.
1
2
3
4
5
Turn off the power of the controller.
Remove bolt/plated bolt (1) and J3 arm cover (2). When packing
is attached, remove packing (12), too.
Remove bolt/plated bolt (3) and J3 arm cover (4). When packing
is attached, remove packing (13), too.
Loosen a bolt (5) a little and lower the tension of the belt (6) and
remove belt (6). Remove the bolt (14) when you do not remove
the belt easily.
Pull cable from upper side of J5-axis motor and remove all relay
connector.
CAUTION
When the belt is removed, the wrist moves to bellow
side. Do as the wrist is put on the stand so that the wrist
should not collide with surroundings.
6
7
8
9
Remove bolt (5) and motor (11).
Remove cable K110, K111 from motor (11).
Remove seal bolt (7), washer (8), motor pulley (9) and key (10).
Assemble it in the opposite procedure after exchanging motor and
packing for the new article.
・Adjust the tension of the belt referring to Section 6.1 after the
installation of the belt.
10 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.). In this time, perform not only
J5-axis but also J6-axis.
- 68 -
4.REPLACING PARTS
B-82585EN/02
4
11
5
9 7
10
2
A
8
13
6
12
3
1
Fig. 4.10(a) Replacing J5-axis motor
TENSION ADJUSTING
BOLT
14
VIEW A
Fig. 4.10(b) Replacing J5-axis motor
- 69 -
4.REPLACING PARTS
Parts Name
B-82585EN/02
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10(*1)
3
2.0Nm (20kgfcm)
A97L-0218-0496#M4X12BC (*2)
11
4.5Nm (46kgfcm)
A97L-0218-0496#M4X12EN (*3)
11
4.5Nm (46kgfcm)
A290-7139-X405(*1)
1
A290-7139-X407 (*2)
1
2 J3 ARM COVER
A290-7139-Y407 (*4)
1
A290-7139-Z407 (*5)
1
BOLT
A97L-0218-0504#M4X10(*1)
3
2.0Nm (20kgfcm)
3 PLATED BOLT
A97L-0218-0496#M4X12BC (*2)
11
4.5Nm (46kgfcm)
PLATED BOLT
A97L-0218-0496#M4X12EN (*3)
11
4.5Nm (46kgfcm)
A290-7139-X405(*1)
1
A290-7139-X407 (*2)
1
4 J3 ARM COVER
A290-7139-Y407 (*4)
1
A290-7139-Z407 (*5)
1
5 BOLT
A97L-0218-0504#M5X12
3
5.6Nm (57kgfcm)
6 BELT
A98L-0040-0227#006-152
1
7 SEAL BOLT
A97L-0218-0423#030606
1
1.3Nm (13kgfcm)
8 WASHER
A290-7210-X532
1
9 MOTOR PULLEY A290-7139-X413
1
10 KEY
JB-HKY-3X3X6B
1
With brake A06B-0117-B855#0049
1
11 MOTOR
No brake A06B-0117-B205#0049
1
12 PACKING
A290-7139-X454 (*6)
1
13 PACKING
A290-7139-X454 (*6)
1
14 BOLT
A97L-0218-0423#030606
3
1.3Nm (13kgfcm)
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L or LR Mate
200iC/5C,5LC,5WP is specified
- 70 -
4.REPLACING PARTS
B-82585EN/02
4.11
REPLACING J5-AXIS REDUCER
Replacing procedure
CAUTION
This mechanism becomes J4 axis in 5H.When you
replace part of 5H, read J5/J6 as J4/J5.
1
2
3
4
Turn off the power of the controller.
Remove both side of J3-arm cover referring to Section 4.10.
Remove belt (1) referring to Section 4.10.
Pull out cable from upper side of J5-axis motor and remove all
relay of cable.
CAUTION
When the belt is removed, the wrist moves to bellow
side. Do as the wrist is put on the stand so that the wrist
should not collide with surroundings.
5
6
7
Remove seal bolt (2), washer plate (3) and pulley (4)
Remove key (6) and bolt (7).
Remove seal bolt (8) and J3 arm (9). When severe dust/liquid
protection specification is specified, remove packing (16), too. In
this time, pay attention not to damage oil seal (5). Pay attention
that there is a possibility that grease goes out, too.
8 Remove relay of cable K112, K113 and K106, K107.
9 Remove bolt/plated bolt (10) and remove reducer (13).
10 Replace reducer and packing to new one, and assemble robot by
opposite procedure. In this time, pay attention below.
- Fill grease to the reducer. It is total 7ml greasing in inside of
reducer, gear and bearing of wave generator and install it
horizontally. Install O-ring (11) and (14) and wave washer (15)
without forgetting.
- Apply grease to the lip of the Oil seal (5)
- Adjust the tension of the belt referring to Section 6.1 after the
installation of the belt.
- When severe dust/liquid protection specification of LR Mate
200iC, LR Mate 200iC/5L or LR Mate 200iC/5C,5LC,5WP is
specified, spread sealant to the reducer referring to Fig.4.11 (b).
CAUTION
Do not apply grease to the O-ring (11).
Otherwise, hardening of sealant is prevented,
causing a grease leak.
11 Perform mastering (See subsection 6.2 and refer to section 8 of
OPERATOR’S MANUAL.). In this time, perform not only
J5-axis but also J6-axis.
- 71 -
4.REPLACING PARTS
9
B-82585EN/02
16
1
8
5
12
13
14
15
7
3
4
6
11
10
2
Fig. 4.11(a) Replacing J5-axis reducer
Parts Name
1
2
3
4
5
6
7
8
Specifications
Number
BELT
SEAL BOLT
WASHER PLATE
PULLEY
OIL SEAL
KEY
BOLT
SEAL BOLT
A98L-0040-0227#006-152
A97L-0218-0423#030606
A290-7139-X231
A290-7139-X414
A98L-0040-0223#01001805
JB-HKY-3X3X6B
A6-BA-3X8
A97L-0218-0423#041616
A290-7139-X403(*1)
9 J3 ARM 2
A290-7139-Y403(*2)
A290-7139-Z403(*3)
BOLT
A6-BA-3X22(*4)
10 PLATED BOLT
A97L-0218-0496#M3X22BC (*5)
PLATED BOLT
A97L-0218-0496#M3X22EN (*6)
11 O-RING
(Attached to J5 REDUCER)
12 WAVE GENERATOR (Attached to J5 REDUCER)
A97L-0218-0816#50(*1)
13 J5 REDUCER
A97L-0218-0816#50C(*6)
14 O-RING
(Attached to J5 REDUCER)
15 WAVE WASHER
(Attached to J5 REDUCER)
16 PACKING
A290-7139-X453 (*7)
(*1) When LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
- 72 -
1
3
1
1
1
1
12
7
1
1
1
9
9
9
1
1
1
1
1
1
1
Loctite
Torque N-m (kgf-cm)
1.3Nm (13kgfcm)
2.0Nm (20kgfcm)
4.5Nm (46kgfcm)
2.0Nm (20kgfcm)
2.0Nm (20kgfcm)
2.0Nm (20kgfcm)
4.REPLACING PARTS
B-82585EN/02
(*2 )When LR Mate 200iC/5LC,5C is specified.
(*3) When LR Mate 200iC/5WP is specified.
(*4) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H
(*5) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H
(*6) When LR Mate 200iC/5LC,5WP,5C is specified.
(*7) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP 5C is specified.
APPLY LOCTITE 518 TO
OF O-RING(11) SIDE.
DON'T PUT LOCTITE INSIDE THE REDUCER.
Fig. 4.11(b) Spread range of sealant to J5-reducer
(When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP 5C is specified.)
- 73 -
4.REPLACING PARTS
4.12
B-82585EN/02
REPLACING J6-AXIS MOTOR
Replacing procedure
CAUTION
This mechanism becomes J5 axis in 5H.When you
replace part of 5H,read J6 as J5.
1
2
3
Turn off the power of the controller.
Remove both side of J3 arm cover of J3 arm.
Loosen tension adjusting bolt and lower tension and remove belt
(1) referring to Fig. 6.1.1(b). Loose the bolt (9) and remove pulley
if it is difficult to remove the belt.
CAUTION
When the belt (1) is removed, the wrist moves to bellow
side. Do as the wrist is put on the stand so that the wrist
should not collide with surroundings.
4
Loosen bolt (2) and lower tension and remove belt (3).
CAUTION
When the belt (3) is removed, the wrist become
rotatable, When end effector is attached, fix it so that the
wrist should not collide with surroundings.
5
6
7
8
9
Remove bolt (2) motor (8).
Remove cable K112, K113 from motor (8).
Remove seal bolt (4), washer (5), motor pulley (6) and key (7).
Assemble it in the opposite procedure after exchanging motor and
packing for the new article.
・Adjust the tension of the belt referring to Section 6.1 after the
installation of the belt
Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.). In this time, perform not only
J6-axis but also J5-axis.
- 74 -
4.REPLACING PARTS
B-82585EN/02
1
A
4
5
2
8
6
7
B
3
Fig. 4.12(a) Replacing J6-axis motor
TENSION ADJUSTING
BOLT
VIEW A
9
VIEW B
Fig. 4.12(b) Replacing J6-axis motor
- 75 -
TENSION ADJUSTING
BOLT
4.REPLACING PARTS
Parts Name
1 BELT
FLANGE
2
SOCKET BOLT
3 BELT
4 SEAL BOLT
5 WASHER
6 MOTOR PULLEY
7 KEY
8 MOTOR
9 BOLT
B-82585EN/02
Specifications
Number
A98L-0040-0227#006-152
1
A97L-0218-0504#M5X12
3
A98L-0040-0227#006-100
A97L-0218-0423#030606
A290-7210-X532
A290-7139-X413
JB-HKY-3X3X6B
No brake A06B-0117-B205#0049
With brake A06B-0117-B855#0049
A97L-0218-0423#030606
1
1
1
1
1
- 76 -
Loctite
Torque N-m (kgf-cm)
1.3Nm (13kgfcm)
1
3
1.3Nm (13kgfcm)
4.REPLACING PARTS
B-82585EN/02
4.13
REPLACING WRIST UNIT
Replacing procedure
CAUTION
If you replace unit of 5H, read J5/J6 as J4/J5.
1
2
3
Turn off the power of the controller.
Replacing both side of J3 arm cover of J3 arm referring to Section
4.10.
Remove belt (1), (8) referring to Section 4.12.
CAUTION
When the belt (1), (8) is removed, the wrist moves to
bellow side or rotate. Do as the wrist is put on the stand
so that the wrist should not collide with surroundings.
4
5
6
7
8
9
10
11
12
13
14
Remove seal bolt (9), washer (10), pulley (11) and key (12).
Remove seal bolt (13) and J3 arm (14). When packing is attached,
remove packing (21), too.
Remove relay of cable K112, K113 of J6-axis motor and cable
K107 and K108.
Remove seal bolt (2), washer plate (3) and pulley (4)
Remove bolt (7), wrist unit (20) and key (5). In this time, pay
attention not to damage oil seal. Pay attention that there is a
possibility that grease goes out, too.
Remove bolt/plated bolt (19) and J5-axis reducer (16).
Replace wrist unit to new one and attach it. Attach reducer
horizontally after apply greasing to gear of reducer. In this time,
replace wave washer (15), O-ring (17), (18) without forgetting,
too. Apply greasing to the lip of the oil seal (6).
Assemble it in the reverse order of 3-8.
Adjust belt referring to Section 6.1.
Install J3 arm cover.
Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.). In this time, perform not only
J6-axis but also J5-axis.
- 77 -
4.REPLACING PARTS
B-82585EN/02
14
21
13
1
8
16
15
1012
9
11
17
18 19
20
Fig. 4.13 Replacing wrist unit
- 78 -
6
5
2
7
4
3
4.REPLACING PARTS
B-82585EN/02
Parts Name
1
2
3
4
5
6
7
8
9
10
11
12
13
BELT
SEAL BOLT
WASHER PLATE
PULLEY
KEY
OIL SEAL
BOLT
BELT
SEAL BOLT
WASHER
MOTOR PULLEY
KEY
SEAL BOLT
14 J3 ARM 2
15 WAVE WASHER
16 J5 REDUCER
17 O-RING
18 O-RING
BOLT
19 PLATED BOLT
PLATED BOLT
20 WRIST ASS’Y
21 PACKING
Specifications
Number
A98L-0040-0227#006-152
A97L-0218-0423#030606
A290-7139-X23 1
A290-7139-X414
JB-HKY-3X3X6B
A98L-0040-0223#01001805
A6-BA-3X8
A98L-0040-0227#006-100
A97L-0218-0423#030606
A290-7210-X532
A290-7139-X413
JB-HKY-3X3X6B
A97L-0218-0423#041616
A290-7139-X403(*1)
A290-7139-Y403(*2)
A290-7139-Z403(*3)
(Attached to J5 REDUCER)
A97L-0218-0816#50(*1)
A97L-0218-0816#50C(*4)
(Attached to J5 REDUCER)
(Attached to J5 REDUCER)
A6-BA-3X22(*5)
A97L-0218-0496#M3X22BC (*6)
A97L-0218-0496#M3X22EN (*4)
A290-7139-V501(*5)
A290-7139-V502 (*6
A290-7139-V521 (*2)
A290-7139-V531 (*3)
1
3
1
1
1
1
12
1
1
1
1
1
7
1
1
1
1
1
1
1
1
9
9
9
1
1
1
1
A290-7139-X453 (*7)
1
Loctite
Torque N-m (kgf-cm)
1.3Nm (13kgfcm)
2.0Nm (20kgfcm)
1.3Nm (13kgfcm)
4.5Nm (46kgfcm)
2.0Nm (20kgfcm)
2.0Nm (20kgfcm)
2.0Nm (20kgfcm)
(*1) When LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2 )When LR Mate 200iC/5LC,5C is specified.
(*3)When LR Mate 200iC/5WP is specified.
(*4 )When LR Mate 200iC/5LC,5WP,5C is specified.
(*5) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H
(*6) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H
(*7) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP 5C is specified.
- 79 -
4.REPLACING PARTS
4.14
B-82585EN/02
REPLACING J6-AXIS REDUCER
Replacing procedure
CAUTION
This mechanism becomes J5 axis in 5H.When you
replace part of 5H,read J6 as J5.
1
2
3
4
5
6
7
8
Make to posture that J6 turns to the right under and turn off the
power of the controller as shown in Fig.4.14 (a).
Remove bolt (1) and reducer.
Remove seal bolt (3), washer (4) and wave generator (5).
Remove O-ring (6).
Apply greasing to bearing of wave generator (5) to which attach
new reducer and install to the robot.
Greasing total 6ml inside and gear of reducer (2) and wave
generator by using the injection syringe.
Install new reducer (2) to the robot. In this time, replace O-ring (6)
to new one, too.
Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.). In this time, perform not only
J6-axis but also J5-axis.
6
5
4
3
2
1
Fig. 4.14(a) Replacing J6-axis reducer
- 80 -
4.REPLACING PARTS
B-82585EN/02
M3X25
Fig. 4.14(b) Assembling phase of J6-axis reducer
Parts Name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A6-BA-3X25 (*1)
8
2.0Nm (20kgfcm)
A97L-0218-0496#M3X25BC (*2)
8
2.0Nm (20kgfcm)
A97L-0218-0496#M3X25EN (*3)
8
2.0Nm (20kgfcm)
A97L-0218-0817#50(*4)
1
2 REDUCER
A97L-0218-0817#50C(*3)
1
3 SEAL BOLT
A97L-0218-0432#030808
1
1.3Nm (13kgfcm)
4 WASHER
A290-7210-X532
1
5 WAVE GENERATOR (ATTACHED TO J6 REDUCER)
1
6 O RING
(ATTACHED TO J6 REDUCER)
1
2.0Nm (20kgfcm)
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP 5C is specified.
(*4) When LR Mate 200iC, LR Mate 200iC/5H,5L is specified.
- 81 -
4.REPLACING PARTS
4.15
B-82585EN/02
REPLACING J3 BELT
Replacing procedure
1
2
3
Turn off the power of the controller.
Remove blot/plated bolt (1) and J2 arm cover (2). When packing
is attached, remove packing (3), too.
Loosen tension adjusting bolt and lower tension and remove belt
(4) referring to Fig.4.15.
CAUTION
When removing the belt, put the part beyond the
J3 housing on a workbench to prevent the arm
from dropping.
4
Replace belt and packing to new one and do the opposite
procedure. In this time, pay attention below.
- Adjust the tension of the belt referring to Section 6.1 after the
installation of the belt.
5 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.).
1
2 3
4
TENSION ADJUSTING
BOLT
Fig. 4.15 Replacing J3 belt
- 82 -
4.REPLACING PARTS
B-82585EN/02
Parts Name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10(*1)
3
2.0Nm (20kgfcm)
A97L-0218-0496#M4X12BC (*2)
8
4.5Nm (46kgfcm)
A97L-0218-0496#M4X12EN (*3)
8
4.5Nm (46kgfcm)
A290-7139-X306(*1)
1
A290-7139-X308 (*2)
1
2 J2 ARM COVER
A290-7139-Y308 (*4)
1
A290-7139-Z308 (*5)
1
3 PACKING
A290-7139-X355 (*6)
1
4 BELT
A98L-0040-0190#007-098
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 83 -
4.REPLACING PARTS
4.16
B-82585EN/02
REPLACING J5/J6 BELT
Replacing procedure
CAUTION
When replacing 5H,please read J5/J6 as J4/J5.
1
2
3
4
Turn off the power of the controller.
Remove bolt/plated bolt (1) and J3 arm cover (2). When packing
is attached, remove packing (3), too.
Remove bolt/plated bolt (4) and J3 arm cover (5). When packing
is attached, remove packing (6), too.
In case of replacing J5 belt, loosen tension adjusting bolt and
lower tension and remove belt referring to Fig.6.1.1 (b).
In case of replacing J6 belt, loosen tension adjusting bolt and
lower tension and remove belt referring to Fig.6.1.1(c).
CAUTION
When the belt (7) is removed, the wrist moves to bellow
side or rotate. Do as the wrist is put on the stand so That
the wrist should not collide with surroundings.
CAUTION
When the belt (8) is removed, the wrist become
rotatable, When end effector is attached, fix it so that the
wrist should not collide with surroundings.
5
Replace belt and packing to new one and do the opposite
procedure. In this time, pay attention below.
- Adjust the tension of the belt referring to Section 6.1 after the
installation of the belt.
6 Perform mastering (See sub section 6.2 and refer to section 8 of
OPERATOR’S MANUAL.). When J5 belt is replaced, perform
mastering not only J5-axis but also J6-axis.
- 84 -
4.REPLACING PARTS
B-82585EN/02
6
3
2
5
1
4
8
7
Fig. 4.16 Replacing J5/J6 belt
Parts Name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10(*1)
3
2.0Nm (20kgfcm)
A97L-0218-0496#M4X12BC (*2)
11
4.5Nm (46kgfcm)
A97L-0218-0496#M4X12EN (*3)
11
4.5Nm (46kgfcm)
A290-7139-X405(*1)
1
A290-7139-X407 (*2)
1
2 J3 ARM COVER
A290-7139-Y407 (*4)
1
A290-7139-Z407 (*5)
1
3 PACKING
A290-7139-X454 (*6)
1
BOLT
A97L-0218-0504#M4X10(*1)
3
2.0Nm (20kgfcm)
4 PLATED BOLT
A97L-0218-0496#M4X12BC (*2)
11
4.5Nm (46kgfcm)
PLATED BOLT
A97L-0218-0496#M4X12EN (*3)
11
4.5Nm (46kgfcm)
A290-7139-X405(*1)
1
A290-7139-X407 (*2)
1
5 J3 ARM COVER
A290-7139-Y407 (*4)
1
A290-7139-Z407 (*5)
1
6 PACKING
A290-7139-X454 (*6)
1
7 BELT
A98L-0040-0227#006-152
1
8 BELT
A98L-0040-0227#006-100
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 85 -
4.REPLACING PARTS
4.17
B-82585EN/02
REPLACING SOLENOID VALVE
Replacing procedure
1
2
3
4
5
Make J3-axis to posture in which SV PLATE is removed easily.
Turn off the power of the controller.
Remove bolt (1), (3) and SV PLATE (2). When severe dust/liquid
protection specification is specified, remove packing (5), too.
Remove relay of air tube and take solenoid valve out.
Replace solenoid valve and packing to new one, and do the
opposite procedure.
5
1
2
3
4
Fig. 4.17 Replacing Solenoid valve
- 86 -
4.REPLACING PARTS
B-82585EN/02
Parts Name
Specifications
Number
BOLT
PLATED BOLT
1
PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A6-BA-4X8(*1)
4
A97L-0218-0546#040808BC(*2)
4
A97L-0218-0546#040808EN(*3)
4
A97L-0218-0546#041010EN(*4)
4
A290-7139-X433
1
2 SV PLATE
A290-7139-Y433(*3)
1
A290-7139-Z433(*4)
1
BOLT
A6-BA-4X8(*1)
2
PLATED BOLT
A97L-0218-0546#040808BC(*2)
2
3
PLATED BOLT
A97L-0218-0546#040808EN(*3)
2
PLATED BOLT
A97L-0218-0546#041010EN(*4)
2
1
A97L-0218-0113#D3R or
A97L-0218-0113#D3 or
SOL VALVE
4
A97L-0218-0113#D2 or
A97L-0218-0113#D1
5 PACKING
A290-7139-X452 (*5)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5C is specified.
(*4) When LR Mate 200iC/5WP is specified.
(*5) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 87 -
4.REPLACING PARTS
4.18
B-82585EN/02
SEALANT APPLICATION
Washing and degreasing the surfaces to be sealed
1
2
3
4
After dismounting the reducer from the arm, apply releasant
(Loctite Gasket Remover) to the arm’s surface from which the
reducer was dismounted, then wait until the sealant (Loctite 518)
becomes softened (for about 10 minutes). Remove the softened
sealant from the surface using a spatula.
Blow air onto the surface to be sealed to remove dust from the
tapped holes.
Sufficiently degrease the reducer’s surface to be sealed and the
arm’s surface to be sealed, using a cloth dampened with alcohol.
Polish the arm’s surface to be sealed with an oil stone, and
degrease it with alcohol again.
CAUTION
Oil may drip from the inside of the reducer. After
degreasing, make sure that no oil is dripping.
Applying sealant
5
6
Make sure that the reducer and the arm is dry (with no alcohol
remaining). If they are still wet with alcohol, wipe them dry.
Apply sealant (Loctite 518) to the surfaces.
CAUTION
The portions to which sealant is to be applied
vary from one axis to another. See descriptions
about reducer replacement for the relevant axes
for details.
Assembling
7
8
To prevent dust from sticking to the portions to which sealant was
applied, mount the reducer as quickly as possible after sealant
application. Be careful not to touch the applied sealant. If sealant
was wiped off, apply again.
After mounting the reducer, fasten it with bolts and washers
quickly so that the mated surfaces get closer.
- 88 -
5.REPLACING CABLES
B-82585EN/02
5
REPLACING CABLES
Replace the cables every four years (15,360 hours). When the cable is
broken or damaged or shows signs of wear, replace it according to this
chapter.
Precautions to be observed when handling the pulse coder cable
The pulse coder cable is provided with a marking tie, as shown below,
to warn against disconnecting the cable during transportation,
installation, or maintenance.
If the cable with the marking tie is disconnected, mastering must be
performed again. Therefore, do not disconnect the cable except
when replacement of the motor, the pulse coder, the reducer, and the
cable are necessary.
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ取外不可
Fig. 5 marking label
- 89 -
5.REPLACING CABLES
5.1
B-82585EN/02
CABLE WIRING
Followings are the routing of the robot cables.
K114
(End effector)
K112
(J6 power)
K113
(J6 pulse coder)
K110
(J5 power)
K111
(J5 pulse coder)
K108
(RO)
K109
(J4 power)
K106
(J4 to J6 power)
K107
(J4 to J6 pulse coder)
K102
(J2 power)
K103
(J2 pulse coder)
K104
(J3 power)
K105
(J3 pulse coder)
K101
(J1 toJ6 power,pulse coder)
Fig.5.1 (a) Routing of the robot cables (LR Mate 200iC, LR Mate 200iC/5L,5LC,5C,5WP,)
- 90 -
5.REPLACING CABLES
B-82585EN/02
K114
(End effector)
K112
(J5 power)
K113
(J5 pulse coder)
K110
(J4 power)
K111
(J4 pulse coder)
K108
(RO)
K106
(J4 to J5 power)
K107
(J4 to J5 pulse coder)
K102
(J2 power)
K103
(J2 pulse coder)
K104
(J3 power)
K105
(J3 pulse coder)
K101
(J1 to J5 power pulse coder)
Fig. 5.1 (b) Routing of the robot cables (LR Mate 200iC/5H)
- 91 -
5.REPLACING CABLES
5.2
B-82585EN/02
CABLE FORMING
When replacing cables, clamp the cable at the position specified in
Fig.5.2 (a) to (d) using a clamp or a nylon band. Otherwise, cables can
be loosened or pulled by force to cause their disconnection. Refer to
the Fig.5.2 (a) to (d) for the cable clamp.
- 92 -
5.REPLACING CABLES
B-82585EN/02
relay in J2 base
Clamp
J2-2
M2M
M2M
M2M1 K102
M2M1
Clamp
J2-1
M2BK
M2BK
K102
M3M
M3M
K110
relay in J3 arm
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
EE1 K114
EE1
M5P
M6P
EE
EE
K113
M5P
M6P
K111
M6P1
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
Clamp
J3-1
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M5P1 K111
M5P1
Clamp
J4-2
M456PEE1 K107
M456PEE1
‑
+
K107
M4M
M3P
M4P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
Clamp
J4-1
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M 6M1 K112
M2P
M3P
M6P1 K113
Clamp
J2-2
K101
M6M
M4P
K105
M5M
Clamp
J2-2
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M3P1 K105
M1P
M1P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M3P1
K103
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M2P K112
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M2P1 K103
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M2P1
M6M1
K101
Clamp
J4-2
M4M
M5M
Clamp
J3-1
K106
M4M1 K109
K109
M6M
M3BK
M4M1
Clamp
J4-1
Clamp
J1-1
relay in J3 arm
M3BK
M 5M1 K110
M456M1
M1BK
M1BK
Clamp
J2-2
M5M1
K104
M456M1 K106
M1M
M1M
M3M1 K104
M3M1
Connector plate
YV2
YV1 K108
YV1
K114
K108
Connected to
solenoid valve
Fig.5.2 (a) Cable externals chart of Mechanical unit (LR Mate 200iC 3-axes brake type)
relay in J2 base
Clamp
J2-2
Clamp
J2-1
M2M1 K102
M2BK
M2BK
K102
relay in J3 arm
M5M
M6BK
M6M
M6BK
relay in J3 arm
M5P
M5P1 K111
EE1 K114
EE1
YV2
YV1 K108
M5P
Fig.5.2 (b) Cable externals chart of Mechanical unit
(LR Mate 200iC, LR Mate 200iC/5L,5LC,5C,5WP 6-axes brake type)
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M6P
M6P
K113
Connected to
solenoid valve
- 93 -
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
EE
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
K111
K114
YV1
M5BK
M3P
Clamp
J4-2
M456PEE1 K107
M456PEE1
‑
M4P
Clamp
J3-1
K108
M5M
Clamp
J4-1
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
+
M6M1 K112
M6M
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
K107
M4BK
M3P
M4P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
Clamp
J2-2
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
K112
M2P
M2P1 K103
M2P
M4M
Clamp
J2-2
M5P1
K105
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M6P1
M1P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M1P
M3P1
K103
M3P1 K105
M2P1
M6M1
K 101
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M5BK
Clamp
J4-2
Clamp
J1-1
K101
M4M1 K109
K110
Clamp
J3-1
M5M1 K110
M5M1
M456M1 K106
K106
M1BK
M6P1 K113
M1BK
K109
Clamp
J4-1
M1M
M456M1
M1M
M4M1
M4M
Clamp
J2-2
Connector plate
M3BK
M3BK
K104
M3M1 K104
M3M1
M3M
M3M
M4BK
M2M1
M2M
M2M
EE
5.REPLACING CABLES
B-82585EN/02
Clamp
J2-2
M2M
M2M1 K102
M2M1
Clamp
J2-1
M2M
relay in J2 base
M2BK
M2BK
K102
M3M
M3M
relay in J3 arm
M2P1 K103
Clamp
J4-1
Clamp
J4-2
relay in J3 arm
EE1 K114
EE1
M4P
M5P
M5P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M4P
EE
EE
K113
Clamp
J3-1
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M5P1 K113
BAT TE RY BAC KUP
DON' T
DIS CONNE CT
コネクタ 取外不可
M5P1H
M456PEE1 K107
‑
+
M456PEE1
K111
K107
M4M
M3P
BAT TE RY BAC KUP
DON' T
DIS CONNE CT
コネクタ 取外不可
K101
M 5M1 K 110
M2P
M3P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
Clamp
J2-2
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M5M
Clamp
J2-2
M4P1 K111
K105
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M4P1H
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M1P
M1P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M3P1
K103
M3P1 K105
M2P1
K101
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
K112
Clamp
J4-2
Clamp
J4-1
M4M
M2P
Clamp
J3-1
K106
Clamp
J1-1
M5M1H
M456M1 K106
M456M1
M1BK
M1BK
K110
M5M
M3BK
M4M1 K109
Clamp
J2-2
M3BK
K104
M3M1 K104
M1M
M4M1H
M1M
M3M1
Conncetor plate
K108
YV2
YV1 K108
YV1
K114
Connected to
solenoid valve
Fig.5.2(c) Cable externals chart of Mechanical unit (LR Mate 200iC/5H 3-axes brake type)
Clamp
J2-2
M2M
M2M1 K102
M2M1
Clamp
J2-1
M2M
relay in J2 base
M2BK
M2BK
K102
M3M
M3M
EE1 K114
EE1
K113
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M4P
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M5P
M4P1 K111
K111
EE
BAT TE RY BAC KU P
DON' T
DISC ONNE CT
コネクタ 取外不可
relay in J3 arm
M5P1 K113
M456PEE1 K107
M456PEE1
‑
+
M5BK
M3P
Clamp
J4-1
Clamp
J4-2
Clamp
J3-1
YV2
YV1 K108
YV1
K114
K108
Connected to
solenoid valve
Fig.5.2 (d) Cable externals chart of Mechanical unit (LR Mate 200iC/5H 5-axes brake type)
- 94 -
M5BK
M3P
BAT TE RY BAC KU P
DON' T
DISC ONNE CT
コネクタ 取外不可
K107
M5M
M2P
M2P1 K103
Clamp
J2-2
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M5M1 K112
M5M1H
K105
M4BK
Clamp
J2-2
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M4P1H
M1P
M3P1
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
K112
M4M
M2P
M5P1H
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M1P
K103
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
M3P1 K105
M2P1
K101
Clamp
J4-1
BATTERY BACKUP
DON'T
DISCONNECT
コネクタ 取外不可
K101
M5M
Clamp
J4-2
Clamp
J3-1
K106
Clamp
J1-1
M4BK
K110
M456M1 K106
M456M1
M1BK
M1BK
M4M
relay in J3 arm
M3BK
M4M1 K110
Clamp
J2-2
M3BK
K104
M3M1 K104
M1M
M4M1H
M1M
M3M1
Connector plate
M4P
M5P
EE
5.REPLACING CABLES
B-82585EN/02
5.3
CABLE AND AIR TUBE REPLACEMENT
This section describes a procedure for periodically replacing all the
(full-option) mechanical unit cables.
See section 5.1 for the configuration of the mechanical unit cables.
It is necessary to perform after cable replacement. Refer to chapter 6
MASTERING or chapter 8 OPERATOR’S MANUAL in advance. (If
pulse coder cable is not replaced, mastering is not necessary.)
5.3.1
REPLAING CABLE K101 and Air tube (Connector plate to J2
base)
Replacing procedure
1
Turn off the power of the controller and remove cable of
controller side from connector plate of back of J1-axis.
2 Remove robot from floor plate, knock down the robot sidewise.
3 Remove J2 base cover referring to Fig.5.3.1 (a).
4 Remove all relay of cable K102, K103, K104, K105, K106, K107,
K108 and K101.Remove relay of air tube similarly.
(In case of LR Mate 200iC/5C,5LC there are two white air tube
and one black air tube, In case of other models there is one white
air tube and one black air tube.)
5 Remove bolt (5) and cover U (6). When packing is attached,
remove packing (7), too.
6 If necessary, remove cover B. (See Fig.5.3.1(c))
7 Cut the nylon band which connect cable and air tube to clamp
J1-2.
8 Cut the nylon band of battery box terminal and remove cable.
9 Remove connector plate.
10 Pull cable and air tube in J2 base to J1 base side. In this time pull
out the cable after it pushes into the pipe on the tip of the part of
the relayed connector and it passes
11 Replace cable and air tube for the new article and assemble them
by opposite procedure. When packing is attached, be sure to
replace packing to new one.
12 Perform mastering (See section 6.2 and referring to chapter 8 of
OPERATOR’S MANUAL.).
- 95 -
5.REPLACING CABLES
B-82585EN/02
2
4
1
5
6
3
7
Fig.5.3.1 (a) Remove the J2 base cover
Parts name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4X10(*1)
3
2.0Nm(20kgfcm)
A97L-0218-0496#M4X12BC (*2)
8
4.5Nm(46kgfcm)
A97L-0218-0496#M4X12EN (*3)
8
4.5Nm(46kgfcm)
A290-7139-X305(*1)
1
A290-7139-X307 (*2)
1
2 J2 BASE COVER
A290-7139-Y307 (*4)
1
A290-7139-Z307 (*5)
1
3 SPONGE
A290-7139-X346
1
4 PACKING
A290-7139-X354 (*6)
1
A6-BA-4X8(*1)
4
5 BOLT
A97L-0218-0546#040808BC(*2)
4
A97L-0218-0546#040808EN(*3)
4
6 COVER U
A290-7139-X332
1
7 PACKING
A290-7139-X356(*6)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 96 -
5.REPLACING CABLES
B-82585EN/02
A
B
B
ケーブル K102
Cable K102
ケーブル K103
Cable K103
AIR 1
(BLACK)
C
継手
Panel union
AIR 2
(WHITE)
A
パルスコーダ線
Pulsecoder line
(BLUEXWHITE)
ケーブル K104
Cable K104
ケーブル K105
Cable K105
YV1
SECTION A-A
AIR 1
(BLACK)
パワー線
Power line
(REDXWHITE)
AIR 2
(WHITE)
M456PEE1
M2M1
M3M1
M3P1
SECTION B-B
クランプ J2-1
Clamp J2-1
A290-7139-X333
M2P1
DETAIL C
Fig.5.3.1 (b) Replace the cable in J2 base
- 97 -
M456M1
5.REPLACING CABLES
B-82585EN/02
D
E
E
ケーブル K102
Cable K102
ケーブル K103
Cable K103
AIR 1
(O4 BLACK)
EXT
(O4 WHITE)
F
継手
Panel union
AIR 2
(O6 WHITE)
D
SECTION D-D
ケーブル K104
Cable K104
ケーブル K105
Cable K105
パルスコーダ線
Pulsecoder line
(BLUEXWHITE)
AIR 1
(O4 BLACK)
EXT
(O4 WHITE)
パワー線
Power line
(REDXWHITE)
AIR 2
(O6 WHITE)
YV1
SECTION E-E
M456PEE1
M2M1
M3M1
M3P1
M2P1
クランプJ2-1
Clamp J2-1
A290-7139-X333
DETAIL F
M456M1
Fig.5.3.1 (c) Replace the cable in J2 base (LR Mate 200iC/5L,5LC)
- 98 -
5.REPLACING CABLES
B-82585EN/02
3
2
1
Fig.5.3.1(d) Remove the cover B (When only severe dust/liquid protection specification is specified)
When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
Parts name
Specifications
Number
Torque N-m (kgf-cm)
A97L-0218-0496#M4X8BC(*1)
9
4.5Nm(46kgfcm)
A97L-0218-0496#M4X8EN(*2)
9
4.5Nm(46kgfcm)
A290-7139-X233(*1)
1
2 COVER B
A290-7139-Y233(*2)
1
3 PACKING
A290-7139-X252
1
(*1) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When LR Mate 200iC/5LC,5WP,5C is specified.
1
PLATED BOLT
PLATED BOLT
Loctite
- 99 -
5.REPLACING CABLES
B-82585EN/02
ナイロンバンドで固定のこと。
TIE UP WITH NYLON BAND.
-
-
+
+
バッテリボックス端子面
BATTERY BOX TERMINAL SIDE
パルスコーダ線
Pulsecoder line AIR 2
(BLUEXWHITE) (WHITE)
クランプ J1-2
Clamp J1-2
A290-7139-X331
ナイロンバンド
Nylon band
パワー線
Power line
(REDXWHITE)
AIR 2
(WHITE)
AIR 1
(BLACK)
マーキングを合わせること。
ADJUST THE MARKING.
AIR 1
(BLACK)
C
DETAIL C
(LR Mate 200iC/5LC,5C以外)
Except LR Mate 200iC/5LC,5C
パルスコーダ線
Pulsecoder line
(BLUEXWHITE)
クランプ J1-2
Clamp J1-2
A290-7139-X331
ナイロンバンド
Nylon band
パワー線
(REDXWHITE)
AIR 2
(O6 WHITE)
AIR 1
(O4 BLACK)
EXT
(O4 WHITE)
マーキングを合わせること。
ADJUST THE MARKING.
DETAIL C
(LR Mate 200iC/5LC,5C)
Fig.5.3.1 (e) Replace the cable in J1 base
4
1
3
2
NO.1 PIN
Fig.5.3.1 (f) Replace the parts of connector plate
- 100 -
5.REPLACING CABLES
B-82585EN/02
Parts name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
2 BOLT
Loctite
Torque N-m (kgf-cm)
A6-BA-4X10(*1)
4
2.0Nm(20kgfcm)
A97L-0218-0496#M4X10BC (*2)
4
4.5Nm(46kgfcm)
A97L-0218-0496#M4X10EN (*3)
4
4.5Nm(46kgfcm)
A6-BA-4X8
4
LT242
A290-7139-X233(*4)
1
3 CON.PLATE
A290-7139-Y233(*3)
1
4 PACKING
A290-7139-X251 (*5)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*5) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
Clamp J1-1
A290-7139-X234
Pulse coder line
(BLUEXWHITE)
Power line
(REDXWHITE)
Fig.5.3.1 (g) Clamp of J1 base
- 101 -
5.REPLACING CABLES
5.3.2
B-82585EN/02
REPLAING CABLE K106, K107, K108 and Air tube (J2 base to
J3 casing)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
Turn off the power of the controller and remove cable of controller
side from connector plate of back of J1-axis.
Remove the J3 arm cover which is in view of in front of the robot,
it is left referring to Fig.5.3.2 (a).
When packing is attached, remove packing, too.
Drag cable to remove the relay easily.
Remove relay of K106 and K110, K112.
Remove relay of K107 and K111, K113.
Cut the nylon band, which connect cable to clamp J4-2 referring to
Fig.5.3.2 (b).
Remove J3 cover referring to Fig.5.3.2(c).
Remove air tube of six in diameter which color is black and white
that has come from J2 base to J3 casing.
When packing is attached, remove packing, too.
Cut the nylon band, which connect cable to clamp J4-1 referring to
Fig.5.3.2 (d).
Pull out the cable of the J3 arm to the J3 casing side. In this time,
pull out the cable after it pushes into the pipe on the tip of the part
of the relayed connector and it passes.
Remove relay of cable K106 and K109
(In case of LR Mate 200iC/5H,there is no K109.)
Cut the nylon band, which connect cable to clamp J3-2 referring to
Fig.5.3.2 (d).
Remove J2 base cover referring to Section 4.4.
When packing is attached, remove packing, too.
Cut the nylon band, which connect cable to clamp J2-2 referring to
Fig.5.3.2 (e).
Remove relay to K101 and air tube.
Remove clamp J2-1 from J2 base referring to Fig.5.3.1 (b).
Remove guide arm.
When packing is attached, remove packing.
Remove clamp J3-1 from guide arm.
Drag the cable from the upper part and the lower side of the guide
arm. In this time, drag it after it passes it on the tip of the part of
the connector.
Cut the nylon band which connect cable and air tube to clamp J3-2
and sheet referring to Fig.5.3.2 (g) and (h).
Replace cable and air tube for the new article and assemble it by
opposite procedure. When packing is attached, be sure to replace
packing to new one.
Perform mastering (See section 6.2 and referring to chapter 8 of
OPERATOR’S MANUAL.).
- 102 -
5.REPLACING CABLES
B-82585EN/02
3
2
1
Fig.5.3.2 (a) Remove the J2 arm cover
Parts name
Specifications
Number
BOLT
1 PLATED BOLT
PLATED BOLT
Loctite
Torque N-m (kgf-cm)
A97L-0218-0504#M4x10(*1)
3
2.0Nm(20kgfcm)
A97L-0218-0496#M4X12BC (*2)
11
4.5Nm(46kgfcm)
A97L-0218-0496#M4X12EN (*3)
11
4.5Nm(46kgfcm)
A290-7139-X405 (*1)
1
A290-7139-X407 (*2)
1
2 J3 ARM COVER
A290-7139-Y407 (*4)
1
A290-7139-Z407 (*5)
1
3 PACKING
A290-7139-X454 (*6)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 103 -
5.REPLACING CABLES
B-82585EN/02
赤
RED
黒
BLACK
青
BLUE
黄
YELLOW
緑
GREEN
CABLE
透明
CLEAR
ナイロンバンド
NYLON BAND
D
橙
ORANGE
SECTION C-C
DETAIL D
ナイロンバンド
NYLON BAND
MARKING
クランプ J4-2
A290-7139-X334
ナイロンバンド
NYLON BAND
C
ケーブル
Cable
エアチューブ
Air tube
C
Fig.5.3.2 (b) Clamp of J3 arm part
1
3
2
Fig.5.3.2(c) Remove the J3 cover
- 104 -
5.REPLACING CABLES
B-82585EN/02
Parts name
Specifications
Number
Loctite
Torque N-m
(kgf-cm)
BOLT
1 PLATED BOLT
PLATED BOLT
A97L-0218-0504#M4X10(*1)
4
2.0Nm(20kgfcm)
A97L-0218-0417#M4X12BC (*2)
6
4.5Nm(46kgfcm)
A97L-0218-0417#M4X12EN (*3)
6
4.5Nm(46kgfcm)
A290-7139-X404 (*1)
1
A290-7139-X406 (*2)
1
2 J3 COVER
A290-7139-Y406 (*4)
1
A290-7139-Z406 (*5)
1
3 PACKING
A290-7139-X451 (*6)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC/5LC,5C is specified.
(*5) When LR Mate 200iC/5WP is specified.
(*6) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
AIR2
(WHITE)
AIR1
(BLACK)
NYLON BAND
Cable and air tube
Clamp J4-1
A290-7139-X432
Pulse coder line
(BLUEXWHITE)
Power line
(REDXWHITE)
Clamp J3-2
A290-7139-X431
Air tube
(O3.18 7pcs)
Cable
DETAIL E
AIR TUBE
(O6 2pcs)
Cable and air tube
E
NYLON BAND
D
NYLON BAND
1A(RED)
※H002,H003,H004
Cable
1B(BLUE)
※H002,H003,H004
3B(ORANGE)
※H004
3A(CLEAR)
※H004
AIR1(BLACK)
F
2A(YELLOW)
※H003,H004
2B(GREEN)
※H003,H004
SECTION D-D
AIR TUBE
(O6 2;pcs)
D
Air tube
(O3.18 7pcs) Power line
(REDXWHITE)
Fig.5.3.2 (d) Cable clamp in parts of J3 casing
- 105 -
Pulse coder line
(BLUEXWHITE)
DETAIL F
5.REPLACING CABLES
B-82585EN/02
G
CABLE K103
CABLE K105
Clamp J2-2
A290-7139-X334
H
CABLE K102
CABLE K104
DETAIL H
SECTION G-G
G
Fig.5.3.2 (e) Cable clamp in J3 casing part
2
1
3
4
Fig.5.3.2 (f) Remove the guide arm
Parts name
SEAL BOLT
1 SEAL BOLT
SEAL BOLT
2 GUIDE ARM
3 BOLT
4 PACKING
Specifications
A97L-0218-0423#051616(*1)
A97L-0218-0546#051616BC(*2)
A97L-0218-0546#051616EN(*3)
A290-7139-X304(*4)
A290-7139-Y304(*5)
A290-7139-Z304(*6)
A6-BA-4X8
A290-7139-X353 (*7)
- 106 -
Number
4
4
4
1
1
1
2
1
Loctite
Torque N-m (kgf-cm)
5.6Nm(57kgfcm)
5.6Nm(57kgfcm)
5.6Nm(57kgfcm)
5.REPLACING CABLES
B-82585EN/02
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*5) When LR Mate 200iC/5LC,5C is specified.
(*6) When LR Mate 200iC/5WP is specified.
(*7) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
Table 5.3.2
Air tube
(*1) H002,H003,H004,H005,H012,H013,H014,H017,H018,H022,H023,H032,H033 is specified
(*2) H004,H005,H014,H015 is specified
(*3) H003,H004,H005,H013,H014,H015,H018,H023,H024,H033 is specified
ナイロンバンド
NYLON BAND
ナイロンバンド
NYLON BAND
CABLE K107
CABLE K108
AIR 2
(WHITE)
ナイロンバンド
NYLON BAND
3番目マーキング
THIRD MARKING
CABLE K106
シート
SHEET
ナイロンバンド
NYLON BAND
AIR 1
(BLACK)
マーキングを合わせること。
ADJUST THE MARKING.
2番目マーキング
SECOND MARKING
クランプJ2-2
CLAMP J2-2
A290-7139-X334 (1)
ナイロンバンド
NYLON BAND
クランプ J3-1
A290-7521-X335
Fig.5.3.2 (g) Cable clamp inside the guide arm (LR Mate 200iC, LR Mate 200iC/5L,5WP,5H)
ナイロンバンド
NYLON BAND
ナイロンバンド
NYLON BAND
2番目マーキング
SECOND MARKING
ナイロンバンド
NYLON BAND
AIR 1
(O4 BLACK)
EXT
(O4 WHITE)
CABLE K107
CABLE K108
マーキングを合わせること。
ADJUST THE MARKING.
シート
SHEET
AIR 2
(6O WHITE)
3番目マーキング
THIRD MARKING
CABLE K106
ナイロンバンド
NYLON BAND
クランプ J3-1
CLAMP J3-1
A290-7139-X335 (1)
Fig.5.3.2 (h) Cable clamp inside the guide arm (LR Mate 200iC/5C,5LC)
- 107 -
ナイロンバンド
NYLON BAND
クランプ J2-2
CLAMP
A290-7139-X334
5.REPLACING CABLES
5.3.3
B-82585EN/02
REPLAING CABLE K102, K103, K104, K105, K109, K110, K111,
K112, K113
1
2
3
4
5
Turn off the power of the controller.
(In case of except LR Mate 200iC/5H)
In case of cable K102 and K103, remove J2-axis motor,
In case of cable K104 and K105, remove J3-axis motor.
In case of cable K109, remove J4-axis motor.
In case of cable K110 or K111, remove J5-axis motor.
In case of cable K112 or K113, remove J6-axis motor.
See section 4 about replacing procedure of motor.
(In case of LR Mate 200iC/5H)
In case of cable K102 and K103 remove J2-axis motor,
In case of cable K104 and K105, remove J3-axis motor.
In case of cable K110 or K111, remove J4-axis motor.
In case of cable K112 or K113, remove J5-axis motor.
See section 4 about replacing procedure of motor.
Replace cable to new one and assemble it by opposite procedure.
Install motor referring to Section 4.
In case of replacing K103 or K104 or K105 or K109 or K111 or
K112 or K113, perform mastering referring to section 6.2 or
chapter 8 of Operator’s manual.
- 108 -
5.REPLACING CABLES
B-82585EN/02
5.3.4
REPLAING CABLE K104
1
2
3
4
5
Turn off the power of the controller.
Remove J3 arm cover. (See Fig.5.3.2 (a))
Remove nut on J3 arm.
Remove relay of K107 and cable K114.
Replace cable to new one, and assemble it by opposite procedure.
Spread Loctite referring to Fig.5.3.4 and tighten nut with the
specified torque. When packing is attached, be sure to replace
packing.
relay to cable K107
Nut (Attached to K114)
Tightening torque 3.0Nm (31kgfcm)
LT262
Cable K114
Fig.5.3.4 Replace the cable K114
- 109 -
5.REPLACING CABLES
5.3.5
B-82585EN/02
REPLAING AIR TUBE
Replacing procedure of air tube between connector plate to J2 base
1
See section 5.3.1.
Replacing procedure of air tube between J2 base to J3 casing
1
See section 5.3.2.
Replacing procedure of air tube between J3 casing to J3 arm
1
2
3
4
5
6
7
8
9
Turn off the power of the controller.
Remove J3 arm cover. (See Fig.5.3.2 (a))
Remove air tube from panel union on J3 motor.
Cut the nylon band, which connects air tube to clamp J4-2.
Remove J3 cover. (See Fig.5.3.2(c))
Cut the nylon band, which connects air tube to clamp J4-1.
Remove the cover of solenoid valve (See Fig.5.3.5(h))
Drag air tube from the part removed by 7.
Replace air tube to new one, and install them by opposite
procedure. When packing is attached , be sure to replace packing.
- 110 -
5.REPLACING CABLES
B-82585EN/02
580
300
AIR 1
(黒 BLACK)
570
290
AIR 2
(白 WHITE)
→ J2ベース
J2 base
分線盤
←
Connector panel
Fig.5.3.5 (a) Marking of air tube (connector plate to J2 base)( LR Mate 200iC, LR Mate 200iC/5L,5WP,5H)
580
300
AIR 1
(φ4 黒 BLACK)
570
290
AIR 2
(φ6 白 WHITE)
570
290
EXT
(φ4 白 WHITE)
分線盤
←
Connector panel
→ J2ベース
J2 base
Fig.5.3.5 (b) Marking of air tube (connector plate to J2 base)(LR Mate 200iC/5C,5LC)
700
340
290
AIR 1
(黒 BLACK)
910
570
290
AIR 2
(白 WHITE)
J3ケーシング ←
J3 casing
→ J2ベース
J2 base
Fig.5.3.5 (c) Marking of air tube (J2 base to J3 casing) ( LR Mate 200iC, LR Mate 200iC/5WP,5H)
- 111 -
5.REPLACING CABLES
B-82585EN/02
800
340
390
AIR 1
(黒 BLACK)
1010
570
390
AIR 2
(白 WHITE)
→ J2ベース
J2 base
J3ケーシング ←
J3 casing
Fig.5.3.5 (d) Marking of air tube (J2 base to J3 casing) ( LR Mate 200iC/5L)
700
340
290
AIR 1
(φ4 黒 BLACK)
910
570
AIR 2
(φ6 白WHITE)
290
700
340
290
EXT
(φ4 白 WHITE)
→ J2ベース
J2 base
J3ケーシング ←
J3 casing
Fig.5.3.5 (e) Marking of air tube (J2 base to J3 casing) ( LR Mate 200iC/5C)
800
340
390
AIR 1
(φ4 黒 BLACK)
1010
570
AIR 2
(φ6 白WHITE)
390
800
340
EXT
(φ4 白 WHITE)
390
→ J2ベース
J2 base
J3ケーシング ←
J3 casing
Fig.5.3.5 (f) Marking of air tube (J2 base to J3 casing) ( LR Mate 200iC/5LC)
- 112 -
5.REPLACING CABLES
B-82585EN/02
赤
RED
黒
BLACK
青
BLUE
黄
YELLOW
緑
GREEN
コネクタキー向き
KEY DIRECTION
CABLE
プラグ
Plug
透明
CLEAR
ナイロンバンド
NYLON BAND
橙
ORANGE
C
DETAIL C
SECTION B-B
継手
Panel union
B
A
ナイロンバンド
NYLON BAND
MARKING
クランプ J4-2
A290-7139-X334
B
ナイロンバンド
NYLON BAND
A05B-1139-
黒
BLACK
透明
CLEAR
(*1)
(*2)
黄
緑
橙
ORANGE YELLOW GREEN
赤
RED
青
BLUE
(*3)
(*1)
(*1)
(*2)
(*3)
DETAIL A
(*)Refer to table 5.3.
Fig.5.3.5(g) Remove the air tube in J3 arm
3
1
4
2
Fig.5.3.2 (h) Remove the cover of solenoid valve part
- 113 -
5.REPLACING CABLES
Parts name
B-82585EN/02
Specifications
Number
BOLT
1 SEAL BOLT
SEAL BOLT
BOLT
2 SEAL BOLT
SEAL BOLT
Loctite
Torque N-m (kgf-cm)
A6-BA-4X8(*1)
4
A97L-0218-0546#040808BC(*2)
4
4.5Nm(46kgfcm)
A97L-0218-0546#040808EN(*3)
4
4.5Nm(46kgfcm)
A6-BA-4X8(*1)
2
A97L-0218-0546#040808BC(*2)
2
4.5Nm(46kgfcm)
A97L-0218-0546#040808EN(*3)
2
4.5Nm(46kgfcm)
A290-7139-X433(*4)
1
3 SV PLATE
A290-7139-Y433(*5)
A290-7139-Z433(*6)
4 PACKING
A290-7139-X452 (*7)
1
(*1) When not severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*2) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H is specified.
(*3) When LR Mate 200iC/5LC,5WP,5C is specified.
(*4) When LR Mate 200iC,LR Mate 200iC/5L,5H is specified.
(*5) When LR Mate 200iC/5LC,5C is specified.
(*6) When LR Mate 200iC/5WP is specified.
(*7) When severe dust/liquid protection specification of LR Mate 200iC, LR Mate 200iC/5L,5H or LR Mate
200iC/5LC,5WP,5C is specified.
- 114 -
5.REPLACING CABLES
B-82585EN/02
継手
Panel union
エアチューブ(白)
Air tube (White)
エアチューブ(白)
Air tube (White)
エアチューブ(黒)
Air tube (Black)
エアチューブ(黒)
Air tube (Black)
H001,H006指定時
is specified
継手
Panel union
電磁弁
Solenoid valve
A97L-0218-0113#D1
エアチューブ(黒)
Air tube (Black)
エアチューブ
Air tube
エアチューブ(赤)
Air tube (Red)
エアチューブ(白)
Air tube (White)
エアチューブ(黒)
Air tube (Black)
エアチューブ(青)
Air tube (Blue)
H002,H032指定時
is specified
継手
Panel union
エアチューブ(白)
Air tube (White)
エアチューブ(黒)
Air tube (Black)
電磁弁
Solenoid valve
A97L-0218-0113#D2 (1)
エアチューブ
Air tube
エアチューブ(黄)
Air tube (Yellow)
エアチューブ(赤)
Air tube (Red)
エアチューブ(黒)
Air tube (Black)
エアチューブ(緑)
Air tube (Green)
エアチューブ(青)
Air tube (Blue)
H003,H013,H033指定時
is specified
電磁弁
Solenoid valve
A97L-0218-0113#D3R (1)
(H005,H015指定時)
is specified
A97L-0218-0113#D3(1)
(H004,H014指定時)
is specified
エアチューブ
Air tube
継手
Panel union
エアチューブ(白)
Air tube (White)
エアチューブ(黒)
Air tube (Black)
エアチューブ(黒)
Air tube (Black)
エアチューブ(透明)
Air tube (Clear)
エアチューブ(オレンジ
Air tube (Orange)
エアチューブ(黄色)
Air tube (Yellow)
エアチューブ(赤)
Air tube (Red)
エアチューブ(緑)
Air tube (Green)
エアチューブ(青)
Air tube (Blue)
H004,H005,H014,H015指定時
is specified
Fig.5.3.5 (i) Remove the air tube of solenoid valve part (LR Mate200iC, LR Mate200iC/5C,5WP,5H)
- 115 -
5.REPLACING CABLES
B-82585EN/02
継手
Panel union
継手
Panel union
エアチューブ(黒)
Air tube (Black)
電磁弁
Solenoid valve
A97L-0218-0113#D1 (1)
エアチューブ(赤)
Air tube (Red)
エアチューブ
Air tube
エアチューブ
Air tube
エアチューブ(白)
Air tube (White)
エアチューブ(黒)
Air tube (Black)
エアチューブ(青)
Air tube(Blue)
H017,H022指定時
is specified
継手
Panel union
エアチューブ(黒)
Air tube (Black)
電磁弁
Solenoid valve
A97L-0218-0113#D2 (1)
エアチューブ(黄)
Air tube(Yellow)
継手
Panel union
エアチューブ
Air tube
エアチューブ
Air tube
エアチューブ(赤)
Air tube(Red)
エアチューブ(白)
Air tube (White)
エアチューブ(黒)
Air tube (Black)
エアチューブ(緑)
Air tube (Green)
エアチューブ(青)
Air tube (Blue)
H018,H023指定時
is specified
エアチューブ(白)
Air tube (White)
継手
Panel union
エアチューブ(黒)
Air tube (Black)
エアチューブ(黒)
Air tube (Black)
電磁弁
Solenoid valve
A97L-0218-0113#D3(1)
エアチューブ(透明)
Air tube (Clear)
エアチューブ(黄)
Air tube (Yellow)
継手
Panel union
エアチューブ
Air tube
エアチューブ
Air tube
エアチューブ(赤)
Air tube (Red)
エアチューブ(オレンジ)
Air tube (Orange)
エアチューブ(緑)
Air tube (Green)
エアチューブ(青)
Air tube (Blue)
H024指定時
is specified
Fig.5.3.5 (j) Remove the air tube of solenoid valve part (LR Mate 200iC/5L,5LC)
- 116 -
6.ADJUSTMENTS
B-82585EN/02
6
ADJUSTMENTS
Each part of the mechanical units of a robot is set to the best condition
before the robot is shipped to the customer. The customer does not
need to make adjustments on the robot when it is delivered.
- 117 -
6.ADJUSTMENTS
6.1
B-82585EN/02
ADJUSTING TENSION OF BELT
Please use the following tension meters for the tension adjustment of
the belt.
Instrument
Specifications
Tension meter
A97L-0218-0700
Vendor
Mitsuboshi Belting Ltd.
1
2
3
4
5
Manufacturer model No.
Application
DOCTOR TENSION TYPE-Ⅱ Adjustment of belt tension
Move the robot posture to J2=0° and J3=0°.
Remove the bolt and arm cover (refer to Chapter 5).
When severe dust/liquid protection specification is selected,
remove packing, too.
Adjust it so that it may loosen tension-adjusting bolts and the
tension may reach a regulated value.
Attach arm cover. In case of severe dust/liquid protection
specification, be sure to replace packing to new one. In this time,
tighten the bolt with the specified torque.
TENSION
ADJUSTING BOLT
Fig. 6.1(a) Adjusting tension of J3 belt
Table. 6.1(a) Measurement condition of J3 belt
BELT TENSION
MASS
WIDTH
SPAN
85±5N
0.0367kg
7mm
175mm
NOTE
This is example of LR Mate 200iC. In case of LR
Mate 200iC/5H, please read J5/J6 as J4/J5.
- 118 -
6.ADJUSTMENTS
B-82585EN/02
TENSION
ADJUSTING BOLT
Fig. 6.1(b) Adjusting tension of J5 belt
TENSION
ADJUSTING BOLT
Fig. 6.1(c) Adjusting tension of J6 belt
Table 6.1(b) Measurement condition of J5 belt
BELT TENSION
MASS
WIDTH
SPAN
27.5±2.5N
0.0171kg
6mm
180mm
Table 6.1(c) Measurement condition of J6 belt
BELT TENSION
MASS
WIDTH
SPAN
- 119 -
27.5±2.5N
0.0171kg
6mm
110mm
6.ADJUSTMENTS
6.2
B-82585EN/02
MASTERING
Mastering is an operation performed to associate the angle of each
robot axis with the pulse count value supplied from the absolute pulse
coder connected to the corresponding axis motor. To be specific,
mastering is an operation for obtaining the pulse count value
corresponding to the zero position.
The current position of the robot is determined according to the pulse
count value supplied from the pulse coder on each axis.
Mastering is factory-performed. It is unnecessary to perform
mastering in daily operations. However, mastering becomes necessary
after:
- Motor replacement
- Pulse coder replacement
- Reducer replacement
- Cable replacement
- Batteries for pulse count backup in the mechanical unit have gone
dead.
NOTE
Robot data (including mastering data) and pulse
coder data are backed up by their respective backup
batteries. Data will be lost if the batteries go dead.
Replace the batteries in the control and mechanical
units periodically. An alarm will be issued to warn the
user of a low battery voltage.
Mastering method
There are following five methods of mastering.
Fixture position
mastering
Zero-position mastering
(eye mark mastering)
Simplified mastering
One-axis mastering
Mastering data entry
- 120 -
This is performed using a mastering fixture before
the machine is shipped from the factory.
This is performed with all axes set at the 0-degree
position. A zero-position mark (eye mark) is
attached to each robot axis. This mastering is
performed with all axes aligned to their respective
eye marks.
This is performed at a user-specified position. The
corresponding count value is obtained from the
rotation speed of the pulse coder connected to the
relevant motor and the rotation angel within one
rotation. Simplified mastering uses the fact that the
absolute value of a rotation angel within one rotation
will not be lost.
This is performed for one axis at a time. The
mastering position for each axis can be specified by
the user. This is useful in performing mastering on a
specific axis.
Mastering data is entered directly.
6.ADJUSTMENTS
B-82585EN/02
This MAINTENANCE MANUAL describes fixture position
mastering that is mainly required during replacement of parts. For
other mastering methods, refer to OPERATOR’S MANUAL.
Once mastering is performed, it is necessary to carry out positioning,
or calibration. Positioning is an operation is which the control unit
reads the current pulse count value to sense the current position of the
robot.
NOTE
If mastering is performed incorrectly, the robot may
behave unexpectedly. This is very dangerous.
Therefore, the positioning screen is designed to
appear only when the $MASTER_ENB system
variable is 1 or 2. After performing positioning, press
F5 [DONE] on the positioning screen. The
$MASTER_ENB system variable is reset to 0
automatically, thus hiding the positioning screen.
CAUTION
It is recommended that the current mastering data
be backed up before mastering is performed.
6.2.1
RESETTING ALARMS AND PREPARING FOR MASTERING
Before performing mastering because a motor is replaced, it is
necessary to release the relevant alarm and display the positioning
menu.
Alarm displayed
“Servo 062 BZAL” or “Servo 075 Pulse mismatch”
Procedure
1
Display the positioning menu by following steps 1 to 6.
1
Press the screen selection key.
2
Press [0 NEXT] and Select [6 SYSTEM].
3
Press F1 [TYPE], and select [SYSTEM Variable] from the
menu.
4
Place the cursor on $MASTER_ENB, then key in “1” and
press [ENTER].
5
Press F1 [TYPE], and select [Mater/Cal] from the menu.
6
Select the desired mastering type from the [Master/Cal]
menu.
2
To reset the “Servo 062 BZAL” alarm, follow steps 1 to 5.
1
Press the screen selection key.
2
Press [0 NEXT] and Select [6 SYSTEM].
3
Press F1 [TYPE], and select [SYSTEM Variable] from the
menu.
4
Press the F3 RES_PCA, then press F4 [TRUE].
5
Switch the controller power off and on again.
To reset the “Servo 075 Pulse mismatch” alarm, follow steps 1 to 3.
3
- 121 -
6.ADJUSTMENTS
B-82585EN/02
1
2
3
6.2.2
When the controller power is switched on again, the
message “Servo 075 Pulse mismatch” appears again.
Rotate the axis for which the message mentioned above has
appeared through 10 degrees in either direction.
Press [FAULT RESET]. The alarm is reset.
FIXTURE POSITION MASTER
Fixture position mastering is performed using a mastering fixture.
This mastering is carried out in the predetermined fixture position.
Fixture position mastering is accurate because a dedicated mastering
fixture is used.
When mastering the robot, arrange the robot to meet the following
conditions.
- Make the robot mounting base horizontal within 1 mm.
(Set the robot mounting face so that the levelness of the entire
surface is 1 mm or less.)
- Remove the hand and other parts form the wrist.
- Set the robot in the condition protected from an external force.
Assembling the fixture base
1
Assemble the fixture base as shown in Fig. 6.2.2 (a).
PIN
A290-7139-X913
PIN
A290-7139-X914
M8X20(4pcs)
FIXTURE BASE A
A290-7139-X911
FIXTURE BASE B
A290-7139-X912
PLATE
A290-7137-X912
M5X16(2pcs)
PLATE
A290-7137-X913
M5X16 (2pcs)
Fig. 6.2.2(a) Assembling the fixture base
- 122 -
6.ADJUSTMENTS
B-82585EN/02
2
Mount the fixture on the J1–axis base with bolts as shown in
Fig.6.2.2 (b)
M8X25(4pcs)
PIN
A290-7139-X914
PIN
A290-7139-X913
Fig. 6.2.2 (b) Mounting dial indicator
3
Mount the fixture to the wrist flange as shown Fig.6.2.2 (c). By
using the calibration block, adjust the dial gage needle to 3.00
mm and fasten it with M-5 bolt. (In case of LR Mate 200iC/5H,
the dial gage No.3 is not necessary to adjust.)
NOTE
The dial gage could be damaged if the bolt is
fastened too tight.
- 123 -
6.ADJUSTMENTS
B-82585EN/02
FIXTURE D
A290-7135-X966
NO.3
NO.5
How to assemble diag gauge
NO.2
NO.6
NO.1
BOLT M5
NO.4
CLAMP
CALIBRATION BLOCK
FIXTURE A
A290-7139-X916
FIXTURE B
A290-7131-X964
FIXTURE C
A290-7139-X917
Fig. 6.2.2 (c) Mounting the wrist fixture
4
Assemble the fixture to the wrist flange as shown in Fig. 6.2.2
(d).
PIN
A290-7130-X966
M5X16(4pcs)
Fig. 6.2.2 (d) Assembling the fixture to the wrist flange
- 124 -
6.ADJUSTMENTS
B-82585EN/02
Mastering
1
2
3
4
Press MENUS.
Press NEXT and select SYSTEM.
Press F1, [TYPE].
Select Mater/Cal.
SYSTEM Master/Cal
JOINT 10%
1 FIXTURE POSITION MASTER
2 ZERO POSTIION MASTER
3 QUICK MASTER
4 SINGLE AXIS MASTER
5 SET QUICK MASTER REF
6 CALLIBRATE
Press ‘ ENTER ‘ or number key to select.
[ TYPE ]
5
LOAD RES_PCA
DONE
Release brake control, and jog the robot into a posture for
mastering.
NOTE
Brake control can be released by setting the system
variables as follows:
$PARAM_GROUP.$SV_OFF_ALL: FALSE
$PARAM_GROUP.$SV_OFF_ENB[*]: FALSE (for all
axes)
After changing the system variables, switch the
control unit power off and on again.
To prevent an error from occurring due to axis backlash at this
time, ensure that the dial gage needle is adjusted to a specified
position in the decreasing direction. If the needle is adjusted in the
reverse direction, start all over again.
(In case of LR Mate 200iC, LR Mate 200iC/5L,5LC,5C,5WP)
1) Move the robot gradually so that dial gages No.1 through No. 6
shown in Fig.6.2.2 (c) touch the points indicated by arrows No.
1 through No. 6 shown in Fig.6.2.2 (e).
2) Move the J6 axis so that dial gages No.1 and No.2 indicate
same value.
3) Set the corresponding value of dial gauges No.4 and No.5 and
move the J1–axis and the J4–axis so that the dial gauge No.3
may show 3.00mm. When the value of dial gauge No.1 and No.2
deviates, modify it to make correspond.
4) Move the J2, J3, and J5 axes so that dial gages No.2, No.3 and
No.4 indicate 3.00 mm.
5) After the operations above, check that all dial gages indicate 3.00
mm.
- 125 -
6.ADJUSTMENTS
B-82585EN/02
(In case of LR Mate 200iC/5H)
1) Move the robot gradually so that dial gages No.1, No.2, No.4,
No.5 and No.6 shown in Fig.6.2.2 (c) touch the points indicated
by arrows No.1, No.2, No.4, No.5 and No.6 shown in Fig.6.2.2
(e). (Dial gauge No.3 is not used.)
2) Move the J5 axis so that dial gages No.1 and No.2 indicate
same value.
3) Move the J1 axis so that dial gages No.4 and No.5 indicate
same value.
4) Move the J2, J3, and J4 axes so that dial gages No. 1,No.5, No.6
indicate 3.00 mm.
5) After the operations above, check that all dial gages indicate 3.00
mm.
6
7
8
Select “ 1 FIXTURE POSITION MASTER” and Press F4, YES.
“MASTER POSITION” shown in Figs. 6.2.2(e) is set in this
position.
Select “ 6 CALIBRATE “ and press F4, YES. Mastering will be
performed. Alternatively, switch the power off and on again.
Switching the power on always causes positioning to be
performed.
After positioning is completed, press F5 [DONE].
WARNING
Since the axis stroke is not checked during the
mastering, be careful to stay clear of the robot
motion.
- 126 -
6.ADJUSTMENTS
B-82585EN/02
MASTERING POSITION
LR Mate 200iC,
LR Mate 200iC/5WP,5C
AXIS
POSITION
J1
90
deg
J2
61.112 deg
-85.965 deg
J3
J4
0
deg
-94.035 deg
J5
J6
0
deg
MASTERING POSITION
LR Mate 200iC/5H
AXIS
POSITION
90
deg
J1
J2
61.112 deg
-85.965 deg
J3
-94.035 deg
J4
0
deg
J5
NO.1 NO.6
NO.2
NO.3(*)
NO.5
(*)In case of LR Mate 200iC
/5H,NO.3 is not used.
NO.4
Fig. 6.2.2 (e) Mastering posture (LR Mate 200iC, LR Mate 200iC/5WP,5C)
- 127 -
6.ADJUSTMENTS
B-82585EN/02
NO.6
NO.1
NO.2
NO.3
NO.5
MASTERING POSITION
LR Mate 200iC/5L,5LC
AXIS
POSITION
90 deg
J1
J2
52.147 deg
-94.284 deg
J3
J4
0 deg
-85.716 deg
J5
J6
0 deg
NO.4
Fig. 6.2.2 (f) Mastering posture (LR Mate 200iC/5L,5LC)
- 128 -
APPENDIX
A
A.SPARE PARTS LIST
APPENDIX
B-82585EN/02
SPARE PARTS LIST
Table A (a1) List of Basic cable (Specifications of Standard,5WP,5C)
Name
Specifications
Remarks
A660-8016-T285
RMP(Standard,5C)
A660-8016-T495
RMP(5WP)
K102
A660-4004-T706
J2 power
K103
A660-2006-T657
J2 pulse coder
K104
A660-4004-T707
J3 power
K105
A660-2006-T658
J3 pulse coder
K106
A660-4004-T708
K101
Relay of J4, J5, J6 power
J4 pulse coder
K107
A660-4004-T709
Relay of J5, J6 pulse coder
Relay of end effector
K108
K109
K110
K111
K112
A660-2006-T659
Relay of YV
A660-2006-T660 (3-axis brake type)
J4 power
A660-4004-T710 (6-axis brake type)
A660-2006-T661 (3-axis brake type)
J5 power
A660-4004-T711 (6-axis brake type)
A660-2006-T662
J5 pulse coder
A660-2006-T663 (3-axis brake type)
J6 power
A660-4004-T712 (6-axis brake type)
K113
A660-2006-T664
J6 pulse coder
K114
A660-2006-T665
End effector
K131
A660-8016-T498#L5R003
- 131 -
External battery cable
(When external battery option is selected)
A.SPARE PARTS LIST
APPENDIX
B-82585EN/02
Table A (a2) List of Basic cable (Specifications of 5L,5LC)
Name
Specifications
Remarks
K101
A660-8016-T285
RMP
K102
A660-4004-T822
J2 power
K103
A660-2006-T789
J2 pulsecoder
K104
A660-4004-T823
J3 power
K105
A660-2006-T790
J3 pulsecoder
K106
A660-4004-T824
Relay of J4, J5, J6 power
J4 pulsecoder
K107
A660-4004-T825
Relay of J5, J6 pulsecoder
Relay of end effector
K108
A660-2006-T791
Relay of YV
K109
A660-2006-T710
J4 power
K110
A660-2006-T711
J5 power
K111
A660-2006-T662
J5 pulse coder
K112
A660-4004-T712
J6 power
K113
A660-2006-T664
J6 pulsecoder
K114
A660-2006-T665
End effector
K131
A660-8016-T498#L5R003
Table A (a3) List of Basic cable (5H)
Name
External battery cable
(When external battery option is selected)
Specifications
Remarks
K101
A660-8016-T285
RMP
K102
A660-4004-T706
J2 power
K103
A660-2006-T657
J2 pulse coder
K104
A660-4004-T707
J3 power
K105
A660-2006-T658
J3 pulse coder
K106
A660-4004-T810
Relay of J4, J5 power
K107
A660-4004-T811
K108
A660-2006-T659
Relay of YV
A660-2006-T771 (3-axis brake type)
J4 power
K110
K111
K112
Relay of J4, J5 pulse coder
Relay of end effector
A660-4004-T812 (5-axis brake type)
A660-2006-T772
J4 pulse coder
A660-2006-T773 (3-axis brake type)
J5 power
A660-4004-T813 (5-axis brake type)
K113
A660-2006-T774
J5 pulse coder
K114
A660-2006-T665
End effector
K131
A660-8016-T498#L5R003
- 132 -
External battery cable
(When external battery option is selected)
B-82585EN/02
A.SPARE PARTS LIST
APPENDIX
Table A (b1) Motor (Standard, 5L,5LC,5WP,5C)
Name
Specifications
Remarks
βiSR1/6000
A06B-0116-B855#0048
J1, J2-axis
βiSR0.5/6000
A06B-0115-B855#0048
J3-axis
βiSR0.4/4000
A06B-0114-B205#0048
J4-axis (3-axis brake type)
βiSR0.4/4000
A06B-0114-B855#0048
J4-axis(6-axis brake type)
βiSR0.2/4000
A06B-0117-B205#0049
J5,J6-axis(3-axis brake type)
βiSR0.2/4000
A06B-0117-B855#0049
J5,J6-axis(6-axis brake type)
(*) When J2-axis motor is replaced , please order shaft “A290-7139-X322” at the same time.
Table A (b2) Motor (5H)
Name
Specifications
Remarks
βiSR1/6000
A06B-0116-B855#0048
J1,J2-axis
βiSR0.5/6000
A06B-0115-B855#0048
J3-axis
βiSR0.2/4000
A06B-0117-B205#0049
J4,J5-axis(3-axis brake type)
βiSR0.2/4000
A06B-0117-B855#0049
J4,J5-axis(6-axis brake type)
(*) When J2-axis motor is replaced , please order shaft “A290-7139-X322” at the same time.
- 133 -
A.SPARE PARTS LIST
Table A (c)
Reducer
Name
APPENDIX
B-82585EN/02
Specifications
Remarks
Harmonic drive
A97L-0218-0812#80
J1-axis(Standard.5L,5H)
Harmonic drive
A97L-0218-0812#80C
J1-axis(5C,5LC,5WP)
Harmonic drive
A97L-0218-0813#120
J1-axis(Standard.5L,5H)
Harmonic drive
A97L-0218-0813#120C
J2-axis(5C,5LC,5WP)
Harmonic drive
A97L-0218-0814#100
J3-axis(Standard.5L,5H)
Harmonic drive
A97L-0218-0814#100C
J3-axis(5C,5LC,5WP)
Harmonic drive
A97L-0218-0815#80
J4-axis(Standard,5L)
Harmonic drive
A97L-0218-0815#80C
J4-axis(5C,5LC,5WP)
Harmonic drive
A97L-0218-0816#50
J5-axis(Standard.5L),
Harmonic drive
A97L-0218-0816#50C
J5-axis(5C,5LC,5WP)
Harmonic drive
A97L-0218-0817#50
J6-axis(Standard.5L),
Harmonic drive
A97L-0218-0817#50C
J6-axis(5C,5LC,5WP)
J4-axis(5H)
J5-axis(5H)
NOTE
When arranging in the reducer machine unit, the
waving generator is built into the main body of the
reducer machine beforehand as for J4-axis of
Standard,5L,5LC,5WP or 5C reducer. As for other
reducers, the waving generator is separated from the
main body of the reducer machine.
Table A (d) Gear
Name
GEAR J1-1
Specifications
Remarks
A290-7139-X211
J1-axis(Standard,5WP,5C,5H)
A290-7139-X213
J1-axis(5L,5LC)
GEAR J1-2
A290-7139-X212
J1-axis
GEAR J4-1
A290-7139-X411
J4-axis(Standard,5L,5LC,5WP,5C)
GEAR J4-2
A290-7139-X412
J4-axis(Standard,5L,5LC,5WP,5C)
Table A (e) Pulley, shaft, key
Name
Specifications
Remarks
Pulley
A290-7139-X311
J3-axis
Pulley
A290-7139-X312
J3-axis
Pulley
A290-7139-X414
Pulley
A290-7139-X415
Motor pulley
A290-7139-X413
Shaft
A290-7139-X322
J2-axis
Key
JB-HKY-3X3X12B
Motor, pulley, gear
Key
JB-HKY-3X3X6B
Motor, pulley, gear
J5-axis(Standard,5L,5LC,5WP,5C)
J4-axis(5H)
J6-axis(Standard,5L,5LC,5WP,5C)
J5-axis(5H)
J5,J6-axis(Standard,5L,5LC,5WP,5C)
J4,J5-axis(5H)
- 134 -
Table A (f)
Bearing, belt
Name
A.SPARE PARTS LIST
APPENDIX
B-82585EN/02
Specifications
Remarks
Bearing
A97L-0001-0192#08Z000A
J1-axis reducer
Bearing
A97L-0218-0596
J4-axis reducer(Standard.5L,5LC,5WP,5C)
Belt
A98L-0040-0190#007-098
J3-axis motor
Belt
A98L-0040-0227#006-100
Belt
A98L-0040-0227#006-152
J5-axis motor (Standard.5L,5LC,5WP,5C)
J4-axis motor (5H)
J6-axis motor (Standard.5L,5LC,5WP,5C)
J5-axis motor (5H)
Table A (g) Packing(When severe dust/liquid protection specification of standard,5L,5H or 5WP,5C,5LC is
specified)
Name
Specifications
Remarks
Packing
A290-7139-X251
Connector plate
Packing
A290-7139-X252
Cover B
Packing
A290-7139-X253
Battery box
Packing (*)
A290-7139-X351
Cover S
Packing
A290-7139-X352
Support
Packing
A290-7139-X353
Guide arm
Packing
A290-7139-X354
J2 base cover
Packing
A290-7139-X355
J2 arm over
Packing
A290-7139-X356
Cover U
Packing
A290-7139-X451
J3 base cover
Packing
A290-7139-X452
SV plate
Packing
A290-7139-X453
J3 arm
Packing
A290-7139-X454
J3 arm cover (2pcs/1 machines)
(*) This packing is attached when non-severe dust/liquid protection specification of Standard,5L,5H
Table A (h)
Oil seal, O-RING
Name
Specifications
Remarks
J1, J4-axis motor (Standard,5L,5LC5WP,5C)
Oil seal
A98L-0040-0223#01001805
Oil seal
A98L-0040-0049#02603707
Oil seal
A98L-0040-0223#01001805
O-RING
A98L-0001-0347#S46
O-RING
A98L-0001-0347#S35
J1-axis reducer
O-RING
JB-OR1A-G45
J2-axis motor
J1-axis motor (5H)
J4-axis reducer (Standard,5L,5LC5WP,5C)
J5-axis reducer (Standard,5L,5LC5WP,5C)
J4-axis reducer (5H)
J1, J4-axis motor (Standard,5L,5LC5WP,5C)
J1-axis motor (5H)
- 135 -
A.SPARE PARTS LIST
Table A (i)
Seal bolt
Name
APPENDIX
B-82585EN/02
Specifications
Remarks
J 1, J3, J4, J5, J6-axis motor
J2, J3, J5-axis reducer
Seal bolt
A97L-0218-0423#030606
Wrist unit, J4 pipe
Standard,5L,
5LC,5WP,5C
J 1, J3, J4, J5-axis motor
J2, J3, J4-axis reducer
Wrist unit
Seal bolt
A97L-0218-0423#031616
J2-axis motor
Seal bolt
A97L-0218-0423#051212
J2-axis motor
Seal bolt
A97L-0218-0546#043016BC
A97L-0218-0546#043016EN
Seal bolt
A97L-0218-0546#043516BC
A97L-0218-0546#043516EN
Seal bolt
A97L-0218-0546#032504BC
A97L-0218-0546#032504EN
5H
J1-axis reducer(Standard,5L,5H Severe
dust/liquid protection specification)
J1-axis reducer (5C,5LC,5WP)
J2-axis reducer(Standard,5L,5H Severe
dust/liquid protection specification)
J2-axis reducer (5C,5LC,5WP)
J3-axis reducer(Standard,5L,5H Severe
dust/liquid protection specification)
J3-axis reducer (5C,5LC,5WP)
GEAR J1-2, GEAR J4-2
Seal bolt
A97L-0218-0423#030505
(Standard,,5L,5LC,5WP,5C)
Seal bolt
A97L-0218-0423#040808
J1 pipe
Seal bolt
A97L-0218-0423#041212
Support
Seal bolt
A97L-0218-0595#040808BC
Cover S(Standard,5L,5H)
A97L-0218-0595#040808EN
Cover S (5C,5LC,5WP)
A97L-0218-0738#040808BC
Cover S Standard,5L,5H)
A97L-0218-0738#040808EN
Cover S (5C,5LC,5WP)
Seal bolt
A97L-0218-0423#051616
Guide arm
Seal bolt
A97L-0218-0546#051616BC
Guide arm(Standard,5L,5H Severe
GEAR J1-2 (Specifications of 5H)
Seal bolt
dust/liquid protection specification)
A97L-0218-0546#051616EN
Guide arm(5C,5LC,5WP)
Seal bolt
A97L-0218-0423#041616
J3 arm cover
Seal bolt
A97L-0218-0546#040808BC
Cover U Standard,5L,5H Severe dust/liquid
protection specification)
Seal bolt
A97L-0218-0546#040808EN
Cover U (5C,5LC,5WP)
A97L-0218-0417#060606
J1 grease outlet
J3, J4, J5, J6 grease inlet
Seal bolt
A97L-0218-0417#040505
(Standard,5L,5LC,5WP,5C)
J3, J4, J5 grease inlet (5H)
J3 grease outlet
- 136 -
A.SPARE PARTS LIST
APPENDIX
B-82585EN/02
Table A (j) Spring pin, Stopper, Wrist unit, Sheet
Name
Specifications
Remarks
Spring pin
A6-PS-5X18S
J3 Stopper
Stopper
A290-7139-X441
J3Stopper
J6-axis reducer is included
(Standard,5L not severe dust/liquid
protection specification)
A290-7139-V501
J5-axis reducer is included
(5H not severe dust/liquid protection
specification )
J6-axis reducer is included
(Standard,5L severe dust/liquid protection
Wrist unit
specification)
A290-7139-V502
J5-axis reducer is included
(5H severe dust/liquid protection
specification )
J6-axis reducer is included
A290-7139-V521
(5C,5LC)
J6-axis reducer is included
A290-7139-V531
Sheet
(5WP)
A290-7139-X345
J2-axis motor(Standard,5WP,5C,5H)
A290-7139-X349
J2-axis motor(5L,5LC)
- 137 -
A.SPARE PARTS LIST
Table A (k)
APPENDIX
B-82585EN/02
Air tube (Standard,5WP,5C,5H)
Name
Specifications
Air tube
A97L-0218-0114#ABL640R0
Air tube
A97L-0218-0010#AAL580R0
Air tube
A97L-0218-0114#BBL570R0
Air tube
A97L-0218-0010#BAL570R0
Air tube
A97L-0218-0114#ABL700R0
Air tube
A97L-0218-0010#AAL700R0
Air tube
A97L-0218-0114#BBL910R0
Air tube
A97L-0218-0010#BAL700R0
Air tube
(H002,H003,H004,H005,H022,
Remarks
6mm BLACK AIR1
Connector plate to J2base
4mm BLACK AIR1 (5C)
Connector plate to J2base
6mm WHITE AIR2
Connector plate to J2base
4mm
EXT(5C)
Connector plate to J2base
6mm BLACK AIR1
J2 base to J3 casing
4mm BLACK AIR1 (5C)
J2 base to J3 casing
6mm WHITE AIR2
J2 base to J3 casing
4mm
WHITE
EXT(5C)
J2 base to J3 casing
4mm
A97L-0218-0010#BAL150R0
WHITE
WHITE
EXHAUST
J3 casing
H023,H024,H032, H033)
Air tube
(H002,H003,H004,H005,H022,
3.18mm BLACK AIR1
A97L-0218-0010#AFL855R0
J3 casing to J3 arm
H023,H024,H032, H033)
Air tube
(H002,H003,H004,H005,H022,
3.18mm RED
A97L-0218-0010#CFL745R0
A1
J3 casing to J3 arm
H023,H024,H032,H033)
Air tube
(H002,H003,H004,H005,H022,
3.18mm BLUE B1
A97L-0218-0010#DFL745R0
J3 casing to J3 arm
H023,H024,H032,H033)
Air tube
(H003,H004,H005,H023,H024,
3.18mm YELLOW A2
A97L-0218-0010#EFL745R0
J3 casing to J3 arm
H033)
Air tube
(H003,H004,H005,H023,H024,
3.18mm GREEN
A97L-0218-0010#FFL745R0
B2
J3 casing to J3 arm
H033)
Air tube
(H004,H005,H024)
Air tube
(H004,H005,H024)
A97L-0218-0010#GFL745R0
A97L-0218-0010#HFL745R0
- 138 -
3.18mm CLEAR
A3
J3 casing to J3 arm
3.18mm ORANGE B3
J3 casing to J3 arm
Table A (k2)
Air tube(5L,5LC)
Name
Specifications
Air tube
A97L-0218-0114#ABL580R0
Air tube
A97L-0218-0010#AAL580R0
Air tube
A97L-0218-0114#BBL570R0
Air tube
A97L-0218-0010#BAL570R0
Air tube
A97L-0218-0114#ABL800R0
Air tube
A97L-0218-0010#AAL800R0
Air tube
A97L-0218-0114#BBL1R013
Air tube
A97L-0218-0010#BAL800R0
Air tube
A97L-0218-0010#BAL150R0
Air tube
(H012,H013,H014,H015,
A.SPARE PARTS LIST
APPENDIX
B-82585EN/02
Remarks
6mm BLACK AIR1(5L)
Connector plate〜J2 base
4mm BLACK AIR1 (5C)
Connector plate〜J2 base
6mm
WHITE
AIR2
Connector plate〜J2 base
4mm
WHITE
EXT(5C)
Connector plate〜J2 base
6mm BLACK AIR1(5L)
J2 base〜J3 casing
4mm BLACK AIR1(5C)
J2 base〜J3 casing
6mm
WHITE
AIR2
J2 base〜J3 casing
4mm
WHITE
EXT(5C)
J2 base〜J3 casing
4mm
WHITE
EXHAUST
J3 casing
3.18mm BLACK AIR1
A97L-0218-0010#AFL945R0
J3 casing to J3 arm
H017,H018)
Air tube
(H012,H013,H014,H015,
3.18mm RED
A97L-0218-0010#CFL835R0
A1
J3 casing to J3 arm
H017,H018)
Air tube
(H012,H013,H014,H015,
3.18mm BLUE B1
A97L-0218-0010#DFL835R0
J3 casing to J3 arm
H017,H018)
Air tube
(H013,H014,H015,H018)
Air tube
(H013,H014,H015,H018)
Air tube
(H014,H015)
Air tube
(H014,H015)
A97L-0218-0010#EFL835R0
A97L-0218-0010#FFL835R0
A97L-0218-0010#GFL835R0
A97L-0218-0010#HFL835R0
- 139 -
3.18mm YELLOW
A2
J3 casing to J3 arm
3.18mm GREEN
B2
J3 casing to J3 arm
3.18mm
CLEAR
A3
J3 casing to J3 arm
3.18mm ORANGE B3
J3 casing to J3 arm
A.SPARE PARTS LIST
APPENDIX
B-82585EN/02
Table A (l) Solenoid valve (Either the following is installed by the option specification) (except H001,H006,H011
and H016)
Name
Specifications
Remarks
Solenoid valve
A97L-0218-0113#D1
Double solenoidX1(2 positionX1)
Solenoid valve
A97L-0218-0113#D2
Double solenoidX2(2 positionX2)
Solenoid valve
A97L-0218-0113#D3
Double solenoidX3(2 positionX3)
Solenoid valve
A97L-0218-0113#D3R
Table A (m) Battery
Name
Battery
Double solenoidX3
(2 positonX2, 3 positionX1)
Specifications
A98L-0031-0027
Remarks
C battery/1.5V
(When battery built-in option is selected)
Battery
A98L-0031-0005
D battery/1.5V
(When external battery option is selected)
Table A (n) Grease
Name
Grease
Specifications
A98L-0040-0230#2KG
Remarks
Harmonic grease 4BNo.2
- 140 -
B-82585EN02
B
APPENDIX
CIRCUIT
DIAGRM
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
DIAGRAM,
- 141 -
AIR
PRESSURE
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
APPENDIX
B-82585EN/02
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
J1V1
J1W1
1
4
J1U1
J1G1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M1BK
2
3
BK(J1)
1 BKCOM1(J1)
4
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M2M1
(
X‑KEY
BLACK
)
A1 J2U1
A2 BK(J2)
A3 J2W1
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
B1 J2G1
B2 J2V1
B3 BKCOM1(J2)
J2 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M2M
2
3
K102
A660‑4004‑T706
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1)
BKCOM1(J1)
J1U1
J1V1
J1W1
J1G1
XROT
RI1
RO1
+5V(A1)
PRQJ1
XPRQJ1
13
14
15
16
17
18
19
20
21
22
23
24
BK(J2)
BK(J3)
BKCOM1(J2)
25
26
J2U1
27
J2V1
28
J2W1
29
J2G1
30
+24V(OT,A1,A2) 31
RI2
32
RO2
33
+5V(B1,B2) 34
PRQJ2
35
36
XPRQJ2
BKCOM1(J3)
J3U1
J3V1
J3W1
J3G1
XHBK
RI3
RO3
+5V(C1,C2,C3)
PRQJ3
XPRQJ3
G
37
38
39
40
41
42
43
44
45
46
47
48
SG
(BK(J4)) 49
50
J4U
51
J4V
52
J4W
53
J4G
54
+24V(B1) 55
RI4
56
RO4
57
0V(A1) 58
PRQJ4
59
60
XPRQJ4
(BKCOM1(J4))
Han 72DD
(2.5SQ 10A)
(BK(J5)) 61 (BK(J6))
62 (BKCOM1(J6))
J5U
63 J6U
J5V
64 J6V
J5W
65 J6W
J5G
66 J6G
0V(D1,D2) 67 0V(E1,E2,E3,
E4,E5,E6)
RI5
68 RI6
RO5
69 RO6
0V(B1,B2) 70 0V(C1,C2,C3)
PRQJ5
71 PRQJ6
72 XPRQJ6
XPRQJ5
Y‑KEY
WHITE
)
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
A2 PRQJ2
B2 XPRQJ2
A3 +5V(B1) B3 0V(B1)
M3M1
A1 J3U1
A2 BK(J3)
A3 J3W1
F06DYW
CTM
B1 J3G1
B2 J3V1
B3 BKCOM1(J3)
8
9 +5V(B1)
10 0V(B1)
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
A2 PRQJ3
B2 XPRQJ3
A3 +5V(B2) B3 0V(B2)
( X‑KEY
WHITE )
F20DX
CTM
J4U
B1 J4G
(BK(J4)) B2 J4V
J4W
B3 (BKCOM1(J4))
B4
J5G
B5 J5U
J5V
B6 (BK(J5))
(BKCOM1(J5)) B7 J5W
J6U
B8 J6G
(BK(J6)) B9 J6V
A10 J6W
B10 (BKCOM1(J6))
1 BKCOM1(J2)
4
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
J3 MOTOR (βiSR0.5/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M3M
2
3
K104
A660‑4004‑T707
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J3V1
J3W1
1
4
J3U1
J3G1
M3BK
BK(J3)
1 BKCOM1(J3)
4
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M3P1
K101
A660‑8016‑T285
BK(J2)
M2P
K103
A660‑2006‑T657
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
(BKCOM1(J5))
J2U1
J2G1
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M2P1
( Y‑KEY
BLACK )
1
4
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J2V1
J2W1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M3P
8
9 +5V(B2)
10 0V(B2)
K105
A660‑2006‑T658
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
)
A1
A2
A3
A4
A5
A6
A7
A8
A9
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M4M1
K106
A660‑4004‑T708
(
X‑KEY
BLACK
)
A1 J4U
A2
A3 J5W
BATTERY
+6V
(BT1,BT2,BT3,
BT4,BT5,BT6)
+
0V
(BT1,BT2,BT3,
BT4,BT5,BT6)
F20DY
CTM
B1 XPRQJ4
B2 0V(BT4,BT5,BT6)
PRQJ5
B3 XPRQJ5
+5V(C1,C2,C3) B4 0V(C1,C2,C3)
PRQJ6
B5 XPRQJ6
+24V(A1,A2) B6 XHBK
+24V(B1) B7 0V(D1,D2)
RI1
B8 RI2
RI3
B9 RI4
A10 RI5
B10 RI6
M456PEE1
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
( 単二電池
SIZE C )
-
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
A1
A2
A3
A4
A5
A6
A7
A8
A9
PRQJ4
+6V(BT4,BT5,BT6)
YV1
( X‑KEY
BLACK )
A1 0V(E1,E3,E5)
A2 RO1
A3 RO3
A4 RO5
F08DX
CTM
B1 0V(E2,E4,E6)
B2 RO2
B3 RO4
B4 RO6
K107
A660‑4004‑T709
K108
A660‑2006‑T659
注)
NOTE)
1. (***):使用されていない信号。
SIGNALS ARE NOT USED.
2. オプション指定時は、A05C‑1139‑B202を参照。
REFER TO A05C‑1139‑B202 IF SPECIFIED OPTIONS.
Fig. B (a) CIRCUIT DIAGRM (LR Mate 200iC 3-axes brake type)
- 142 -
F06DX
CTM
B1 J4G
B2 J4V
B3
K109
A660‑2006‑T660
APPENDIX
B-82585EN02
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M5M1
( X‑KEY
BLACK )
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
(
Y‑KEY
BLACK
A1 J5U
A2
A3 J5W
F06DY
CTM
A1 +6V(BT5) B1 0V(BT5)
A2 PRQJ5
B2 XPRQJ5
A3 +5V(C2) B3 0V(C2)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
M6M1
(
)
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
A1 J6U
A2
A3 J6W
(
)
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
F06DYW
CTM
B1 J6G
B2 J6V
B3
F06DXW
CTM
A1 +6V(BT6) B1 0V(BT6)
A2 PRQJ6
B2 XPRQJ6
A3 +5V(C3) B3 0V(C3)
( X‑KEY
BLACK )
EE1
A1
A2
A3
A4
A5
A6
RI1
RI2
RI3
RI4
RI5
RI6
B1
B2
B3
B4
B5
B6
M5M
2
3
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
F12DX
CTM
XHBK
+24V(A1)
+24V(A2)
+24V(B1)
0V(D1)
0V(D2)
J5V
J5W
1
4
M5P
8
9 +5V(C2)
10 0V(C2)
K111
A660‑2006‑T662
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J5U
J5G
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
J6 MOTOR (βiSR0.2/6000)
M6M
2
3
K112
A660‑2006‑T663
J6V
J6W
1
4
J6U
J6G
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M6P
M6P1
X‑KEY
WHITE
J5 MOTOR (βiSR0.2/6000)
K110
A660‑2006‑T661
M5P1
)
Y‑KEY
WHITE
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
F06DX
CTM
B1 J5G
B2 J5V
B3
8
9 +5V(C3)
10 0V(C3)
K113
A660‑2006‑T664
EE
2
K114
A660‑2006‑T665
1
RI2
3
4 +6V(BT6)
1
5 XPRQJ6
2
6 PRQJ6
3
7 0V(BT6)
A63L‑0002‑0072#12SN
RI1
9 +24V(A2) 8 +24V(A1)
10 +24V(B1) 12 0V(D2) 7 XHBK
RI3
11 0V(D1) 6 RI6
4 RI4
5 RI5
J4 MOTOR (βiSR0.4/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M4M
2
3
J4V
J4W
1
4
J4U
J4G
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M4P
8
9 +5V(C1)
10 0V(C1)
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
A05B‑1139‑H002
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
R12DX
CRM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
YV2
( X‑KEY
BLACK )
A1 RO1
A2 RO2
A3
A4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3
B4
B5
B6
A05B‑1139‑H004
YV2
A1
A2
A3
A4
A5
A6
SOLENOID VALVE
A97L‑0218‑0113#D1
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
A05B‑1139‑H005
A05B‑1139‑H003
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
YV2
A1
A2
A3
A4
A5
A6
SOLENOID VALVE
A97L‑0218‑0113#D2
:可動部用
MOVABLE
- 143 -
SOLENOID VALVE
A97L‑0218‑0113#D3
RO1
RO2
RO3
RO4
RO5
RO6
SOLENOID VALVE
A97L‑0218‑0113#D3R
LR Mate 200iC (3BK)
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A05B‑1139‑H301指定時
SPECIFIED A05B‑1139‑H302
A05B‑1139‑H321(5C)指定時
SPECIFIED A05B‑1139‑H321(5C)
APPENDIX
B-82585EN/02
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
J1V1
J1W1
1
4
J1U1
J1G1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M1BK
2
3
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
BK(J1)
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
1
4
BKCOM1(J1)
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
A1 J2U1
B1 J2G1
A2 BK(J2) B2 J2V1
A3 J2W1
B3 BKCOM1(J2)
J2 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M2M1
( X‑KEY
BLACK )
M2M
2
3
K102
A660‑4004‑T706
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
(
Y‑KEY
BLACK
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
A2 PRQJ2 B2 XPRQJ2
A3 +5V(B1) B3 0V(B1)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M2P1
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
F06DYW
CTM
A1 J3U1
B1 J3G1
A2 BK(J3) B2 J3V1
A3 J3W1
B3 BKCOM1(J3)
(
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1) 13
14
J1U1
15
J1V1
16
J1W1
17
J1G1
18
XROT
19
RI1
20
RO1
21
+5V(A1) 22
PRQJ1 23
XPRQJ1 24
BKCOM1(J1)
BK(J2) 25
26
27
J2U1
28
J2V1
29
J2W1
30
J2G1
+24V(OT,A1,A2) 31
32
RI2
33
RO2
+5V(B1,B2) 34
PRQJ2 35
XPRQJ2 36
BKCOM1(J2)
BK(J3) 37 BK(J4)
38 BKCOM1(J4)
39 J4U
J3U1
40 J4V
J3V1
41 J4W
J3W1
42 J4G
J3G1
43 +24V(B1)
XHBK
44 RI4
RI3
45 RO4
RO3
+5V(C1,C2,C3) 46
0V(A1)
PRQJ3 47 PRQJ4
XPRQJ3 48 XPRQJ4
G
SG
BKCOM1(J3)
49
50
51
52
53
54
55
56
57
58
59
60
Han 72DD
(2.5SQ 10A)
BK(J5) 61 BK(J6)
62 BKCOM1(J6)
63 J6U
J5U
64 J6V
J5V
65 J6W
J5W
66 J6G
J5G
0V(D1,D2) 67 0V(E1,E2,E3,
E4,E5,E6)
68 RI6
RI5
69 RO6
RO5
0V(B1,B2) 70 0V(C1,C2,C3)
PRQJ5 71 PRQJ6
XPRQJ5 72 XPRQJ6
)
M2P
K101
A660‑8016‑T285
( X‑KEY
WHITE )
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
A2 PRQJ3 B2 XPRQJ3
A3 +5V(B2) B3 0V(B2)
1
4
BKCOM1(J2)
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
M3M
2
3
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J3V1
J3W1
1
4
J3U1
J3G1
M3BK
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M3P1
F20DX
CTM
J4U
B1 J4G
BK(J4) B2 J4V
J4W
B3 BKCOM1(J4)
B4
J5G
B5 J5U
J5V
B6 BK(J5)
BKCOM1(J5) B7 J5W
J6U
B8 J6G
BK(J6) B9 J6V
A10 J6W
B10 BKCOM1(J6)
J2U1
J2G1
J3 MOTOR (βiSR0.5/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
K104
A660‑4004‑T707
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
BKCOM1(J5)
BK(J2)
8
9 +5V(B1)
10 0V(B1)
K103
A660‑2006‑T657
M3M1
Y‑KEY
WHITE
1
4
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J2V1
J2W1
BK(J3)
M3P
8
9 +5V(B2)
10 0V(B2)
K105
A660‑2006‑T658
1
4
BKCOM1(J3)
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
)
A1
A2
A3
A4
A5
A6
A7
A8
A9
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
F06DX
CTM
A1 J4U
B1 J4G
A2 BK(J4) B2 J4V
A3 J5W
B3 BKCOM1(J4)
M4M1
K106
A660‑4004‑T708
(
X‑KEY
BLACK
)
K109
A660‑4004‑T710
BATTERY
+6V
(BT1,BT2,BT3,
BT4,BT5,BT6)
+
0V
(BT1,BT2,BT3,
BT4,BT5,BT6)
-
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
Fig.B(b)
F20DY
CTM
B1 XPRQJ4
B2 0V(BT4,BT5,BT6)
B3 XPRQJ5
+5V(C1,C2,C3) B4 0V(C1,C2,C3)
PRQJ6 B5 XPRQJ6
+24V(A1,A2) B6 XHBK
+24V(B1) B7 0V(D1,D2)
RI1
B8 RI2
RI3
B9 RI4
A10 RI5
B10 RI6
M456PEE1
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
( 単二電池
SIZE C )
A1
A2
A3
A4
A5
A6
A7
A8
A9
PRQJ4
+6V(BT4,BT5,BT6)
PRQJ5
YV1
A1 0V(E1,E3,E5)
A2 RO1
A3 RO3
A4 RO5
F08DX
CTM
B1 0V(E2,E4,E6)
B2 RO2
B3 RO4
B4 RO6
K107
A660‑4004‑T709
K108
A660‑2006‑T659
Circuit diagram (LR Mate 200iC 6-axes brake type When H301 is specified)
(LR Mate 200iC/5C When H321 is specified)
- 144 -
APPENDIX
B-82585EN02
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
F06DX
CTM
A1 J5U
B1 J5G
A2 BK(J5) B2 J5V
A3 J5W
B3 BKCOM1(J5)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M5M1
( X‑KEY
BLACK )
J5 MOTOR (βiSR0.2/6000)
M5M
2
3
K110
A660‑4004‑T711
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M5P1
( Y‑KEY
BLACK )
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
Y‑KEY
WHITE
F06DY
CTM
A1 +6V(BT5) B1 0V(BT5)
A2 PRQJ5 B2 XPRQJ5
A3 +5V(C2) B3 0V(C2)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
)
F06DYW
CTM
A1 J6U
B1 J6G
A2 BK(J6) B2 J6V
A3 J6W
B3 BKCOM1(J6)
8
9 +5V(C2)
10 0V(C2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M6M
2
3
K112
A660‑4004‑T712
(
)
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
EE1
)
A1
A2
A3
A4
A5
A6
RI1
RI2
RI3
RI4
RI5
RI6
B1
B2
B3
B4
B5
B6
F12DX
CTM
XHBK
+24V(A1)
+24V(A2)
+24V(B1)
0V(D1)
0V(D2)
BKCOM1(J5)
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
J6V
J6W
1
4
J6U
J6G
BK(J6)
1
4
BKCOM1(J6)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M6P1
X‑KEY
WHITE
1
4
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M6BK
F06DXW
CTM
A1 +6V(BT6) B1 0V(BT6)
A2 PRQJ6 B2 XPRQJ6
A3 +5V(C3) B3 0V(C3)
J5U
J5G
J6 MOTOR (βiSR0.2/6000)
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
BK(J5)
M5P
K111
A660‑2006‑T662
M6M1
1
4
M5BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J5V
J5W
M6P
8
9 +5V(C3)
10 0V(C3)
K113
A660‑2006‑T664
EE
2
K114
A660‑2006‑T665
1
RI2
3
4 +6V(BT6)
1
5 XPRQJ6
2
6 PRQJ6
3
7 0V(BT6)
A63L‑0002‑0072#12SN
RI1
9 +24V(A2) 8 +24V(A1)
10 +24V(B1) 12 0V(D2) 7 XHBK
RI3
11 0V(D1) 6 RI6
4 RI4
5 RI5
J4 MOTOR (βiSR0.4/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M4M
2
3
K109
A660‑4004‑T710
J4V
J4W
1
4
J4U
J4G
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M4BK
2
3
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
BK(J4)
M4P
8
9 +5V(C1)
10 0V(C1)
1
4
BKCOM1(J4)
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
A05B‑1139‑H002,‑H022
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
R12DX
CRM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
YV2
( X‑KEY
BLACK )
A1 RO1
A2 RO2
A3
A4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3
B4
B5
B6
A05B‑1139‑H004,‑H024
YV2
SOLENOID VALVE
A97L‑0218‑0113#D1
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
A05B‑1139‑H005
A05B‑1139‑H003,‑H023
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
YV2
SOLENOID VALVE
A97L‑0218‑0113#D2
- 145 -
SOLENOID VALVE
A97L‑0218‑0113#D3
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
SOLENOID VALVE
A97L‑0218‑0113#D3R
LR Mate 200iC (6BK)
LR Mate 200iC/5C
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A05B‑1139‑H302指定時
SPECIFIED A05B‑1139‑H302
APPENDIX
B-82585EN/02
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J1V1
J1W1
M1BK
2
3
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
BK(J1)
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
1
4
1
4
J1U1
J1G1
BKCOM1(J1)
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
A1 J2U1
B1 J2G1
A2 BK(J2) B2 J2V1
A3 J2W1
B3 BKCOM1(J2)
J2 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M2M1
(
X‑KEY
BLACK
)
M2M
2
3
K102
A660‑4004‑T706
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
(
Y‑KEY
BLACK
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1) 13
14
J1U1
15
J1V1
16
J1W1
17
J1G1
18
XROT
19
20
RI1
RO1
21
+5V(A1) 22
PRQJ1 23
XPRQJ1 24
BKCOM1(J1)
BK(J2) 25
26
J2U1
27
J2V1
28
J2W1
29
J2G1
30
+24V(OT,A1,A2) 31
RI2
32
RO2
33
+5V(B1,B2) 34
PRQJ2 35
XPRQJ2 36
BKCOM1(J2)
BK(J3) 37 BK(J4)
38 BKCOM1(J4)
J3U1
39 J4U
J3V1
40 J4V
J3W1
41 J4W
J3G1
42 J4G
XHBK
43 +24V(B1)
RI3
44 RI4
RO3
45 RO4
+5V(C1,C2,C3) 46
0V(A1)
PRQJ3 47 PRQJ4
XPRQJ3 48 XPRQJ4
G
SG
BKCOM1(J3)
49
50
51
52
53
54
55
56
57
58
59
60
Han 72DD
(2.5SQ 10A)
BK(J5) 61 BK(J6)
62 BKCOM1(J6)
J5U
63 J6U
J5V
64 J6V
J5W
65 J6W
J5G
66 J6G
0V(D1,D2) 67 0V(E1,E2,E3,
E4,E5,E6)
RI5
68 RI6
RO5
69 RO6
0V(B1,B2) 70 0V(C1,C2,C3)
PRQJ5 71 PRQJ6
XPRQJ5 72 XPRQJ6
Y‑KEY
WHITE
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
A2 PRQJ2 B2 XPRQJ2
A3 +5V(B1) B3 0V(B1)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M2P1
)
)
F06DYW
CTM
A1 J3U1
B1 J3G1
A2 BK(J3) B2 J3V1
A3 J3W1
B3 BKCOM1(J3)
K101
A660‑8016‑T495
(
X‑KEY
WHITE
)
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
A2 PRQJ3 B2 XPRQJ3
A3 +5V(B2) B3 0V(B2)
M2P
M3M
2
3
K104
A660‑4004‑T707
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J3V1
J3W1
M3BK
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M3P1
F20DX
CTM
J4U
B1 J4G
BK(J4) B2 J4V
J4W
B3 BKCOM1(J4)
B4
J5G
B5 J5U
J5V
B6 BK(J5)
BKCOM1(J5) B7 J5W
J6U
B8 J6G
BK(J6) B9 J6V
A10 J6W
B10 BKCOM1(J6)
1
4
J2U1
J2G1
1
4
BKCOM1(J2)
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
J3 MOTOR (βiSR0.5/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M3M1
BK(J2)
8
9 +5V(B1)
10 0V(B1)
K103
A660‑2006‑T657
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
BKCOM1(J5)
J2V1
J2W1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
BK(J3)
M3P
8
9 +5V(B2)
10 0V(B2)
K105
A660‑2006‑T658
1
4
1
4
J3U1
J3G1
BKCOM1(J3)
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
)
A1
A2
A3
A4
A5
A6
A7
A8
A9
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
F06DX
CTM
A1 J4U
B1 J4G
A2 BK(J4) B2 J4V
A3 J5W
B3 BKCOM1(J4)
M4M1
K106
A660‑4004‑T708
)
K109
A660‑4004‑T710
BATTERY
+6V
(BT1,BT2,BT3,
BT4,BT5,BT6)
+
( 単一電池
SIZE D )
0V
(BT1,BT2,BT3,
BT4,BT5,BT6)
GB2
K131
A660‑8016‑T498
-
A
B
C
+6V(BT1,BT2,BT3,
BT4,BT5,BT6)
0V(BT1,BT2,BT3,
BT4,BT5,BT6)
A63L‑0001‑0648#610SL3SJ
GB2
A
B
C
+6V(BT1,BT2,BT3,
BT4,BT5,BT6)
0V(BT1,BT2,BT3,
BT4,BT5,BT6)
A63L‑0001‑0648#210SL3PJ
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
Fig.B(c)
F20DY
CTM
B1 XPRQJ4
B2 0V(BT4,BT5,BT6)
B3 XPRQJ5
+5V(C1,C2,C3) B4 0V(C1,C2,C3)
PRQJ6 B5 XPRQJ6
+24V(A1,A2) B6 XHBK
+24V(B1) B7 0V(D1,D2)
RI1
B8 RI2
RI3
B9 RI4
A10 RI5
B10 RI6
M456PEE1
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
A1
A2
A3
A4
A5
A6
A7
A8
A9
PRQJ4
+6V(BT4,BT5,BT6)
PRQJ5
YV1
A1 0V(E1,E3,E5)
A2 RO1
A3 RO3
A4 RO5
F08DX
CTM
B1 0V(E2,E4,E6)
B2 RO2
B3 RO4
B4 RO6
K107
A660‑4004‑T709
K108
A660‑2006‑T659
Circuit diagram (LR Mate 200iC 6-axes brake type When H302 is specified)
- 146 -
APPENDIX
B-82585EN02
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
F06DX
CTM
A1 J5U
B1 J5G
A2 BK(J5) B2 J5V
A3 J5W
B3 BKCOM1(J5)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M5M1
(
X‑KEY
BLACK
)
J5 MOTOR (βiSR0.2/6000)
M5M
2
3
K110
A660‑4004‑T711
F06DY
CTM
A1 +6V(BT5) B1 0V(BT5)
A2 PRQJ5 B2 XPRQJ5
A3 +5V(C2) B3 0V(C2)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
Y‑KEY
WHITE
)
F06DYW
CTM
A1 J6U
B1 J6G
A2 BK(J6) B2 J6V
BKCOM1(J6)
A3 J6W
B3
(
X‑KEY
WHITE
)
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
8
9 +5V(C2)
10 0V(C2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M6M1
F06DXW
CTM
A1 +6V(BT6) B1 0V(BT6)
A2 PRQJ6 B2 XPRQJ6
A3 +5V(C3) B3 0V(C3)
A1
A2
A3
A4
A5
A6
RI1
RI2
RI3
RI4
RI5
RI6
B1
B2
B3
B4
B5
B6
F12DX
CTM
XHBK
+24V(A1)
+24V(A2)
+24V(B1)
0V(D1)
0V(D2)
BKCOM1(J5)
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
M6M
2
3
K112
A660‑4004‑T712
J6V
J6W
1
4
J6U
J6G
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M6P1
EE1
1
4
J6 MOTOR (βiSR0.2/6000)
M6BK
BK(J6)
M6P
8
9 +5V(C3)
10 0V(C3)
K113
A660‑2006‑T664
EE
2
K114
A660‑2006‑T665
1
RI2
3
1
4
BKCOM1(J6)
4 +6V(BT6)
1
5 XPRQJ6
2
6 PRQJ6
3
7 0V(BT6)
A63L‑0002‑0072#12SN
RI1
9 +24V(A2) 8 +24V(A1)
10 +24V(B1) 12 0V(D2) 7 XHBK
RI3
11 0V(D1) 6 RI6
4 RI4
5 RI5
J4 MOTOR (βiSR0.4/6000)
M4M
2
3
K109
A660‑4004‑T710
BK(J5)
M5P
K111
A660‑2006‑T662
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
J5U
J5G
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M5P1
( Y‑KEY
BLACK )
1
4
M5BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J5V
J5W
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J4V
J4W
1
4
J4U
J4G
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M4BK
2
3
BK(J4)
1
4
BKCOM1(J4)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M4P
8
9 +5V(C1)
10 0V(C1)
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
A05B‑1139‑H002
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
R12DX
CRM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
YV2
(
X‑KEY
BLACK
)
A1 RO1
A2 RO2
A3
A4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3
B4
B5
B6
A05B‑1139‑H004
YV2
SOLENOID VALVE
A97L‑0218‑0113#D1
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
A05B‑1139‑H003
YV2
A1 RO1
A2 RO2
A3 RO3
A4 RO4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3 0V(E3)
B4 0V(E4)
B5
B6
A05B‑1139‑H005
YV2
SOLENOID VALVE
A97L‑0218‑0113#D2
- 147 -
SOLENOID VALVE
A97L‑0218‑0113#D3
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
SOLENOID VALVE
A97L‑0218‑0113#D3R
:可動部用
MOVABLE
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
APPENDIX
B-82585EN/02
A05B‑1139‑H006指定時
SPECIFIED A05B‑1139‑H006
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
J1V1
J1W1
1
4
J1U1
J1G1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M1BK
2
3
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
BK(J1)
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M2M1
( X‑KEY
BLACK )
A1 J2U1
A2 BK(J2)
A3 J2W1
1 BKCOM1(J1)
4
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
B1 J2G1
B2 J2V1
B3 BKCOM1(J2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J2 MOTOR (βiSR1/6000)
M2M
2
3
K102
A660‑4004‑T706
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
B2 XPRQJ2
A2 PRQJ2
A3 +5V(B1) B3 0V(B1)
(
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
M3M1
(
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1)
13
BKCOM1(J1) 14
15
J1U1
16
J1V1
17
J1W1
18
J1G1
19
XROT
20
RI1
21
RO1
+5V(A1) 22
PRQJ1 23
XPRQJ1
24
BK(J2) 25
BKCOM1(J2) 26
J2U1
27
J2V1
28
J2W1
29
J2G1
30
+24V(OT,A1,A2) 31
RI2
32
RO2
33
+5V(B1,B2) 34
35
PRQJ2
36
XPRQJ2
BK(J3)
37 BK(J4)
BKCOM1(J3) 38 BKCOM1(J4)
J3U1
39 J4U
J3V1
40 J4V
J3W1
41 J4W
J3G1
42 J4G
XHBK
43 +24V(B1)
RI3
44 RI4
RO3
45 RO4
+5V(C1,C2,C3) 46
0V(A1)
PRQJ3 47 PRQJ4
XPRQJ3 48 XPRQJ4
G
SG
49
50
51
52
53
54
55
56
57
58
59
60
Han 72DD
(2.5SQ 10A)
61 BK(J6)
BKCOM1(J5) 62 BKCOM1(J6)
J5U
63 J6U
J5V
64 J6V
J5W
65 J6W
J5G
66 J6G
0V(D1,D2) 67 0V(E1,E2,E3,
E4,E5,E6)
RI5
68 RI6
RO5
69 RO6
0V(B1,B2) 70 0V(C1,C2,C3)
71 PRQJ6
PRQJ5
72 XPRQJ6
XPRQJ5
Y‑KEY
WHITE
)
A1 J3U1
A2 BK(J3)
A3 J3W1
F06DYW
CTM
B1 J3G1
B2 J3V1
B3 BKCOM1(J3)
8
9 +5V(B1)
10 0V(B1)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
2
3
(
)
J3V1
J3W1
F20DX
CTM
B1 J4G
B2 J4V
B3 BKCOM1(J4)
B4
J5G
B5 J5U
J5V
B6 BK(J5)
BKCOM1(J5) B7 J5W
J6U
B8 J6G
BK(J6) B9 J6V
A10 J6W
B10 BKCOM1(J6)
1
4
J3U1
J3G1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
BK(J3)
1 BKCOM1(J3)
4
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M3P1
X‑KEY
WHITE
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
M3M
K104
A660‑4004‑T707
M3BK
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
B2 XPRQJ3
A2 PRQJ3
A3 +5V(B2) B3 0V(B2)
1 BKCOM1(J2)
4
J3 MOTOR (βiSR0.5/6000)
2
3
K101
A660‑8016‑T285
BK(J2)
M2P
K103
A660‑2006‑T657
BK(J5)
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
J2U1
J2G1
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M2P1
Y‑KEY
BLACK
1
4
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J2V1
J2W1
M3P
8
9 +5V(B2)
10 0V(B2)
K105
A660‑2006‑T658
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
A7
A8
A9
J4U
BK(J4)
J4W
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
K106
A660‑4004‑T708
( X‑KEY
BLACK )
F06DX
CTM
B1 J4G
A1 J4U
A2 BK(J4) B2 J4V
BKCOM1(J4)
B3
A3 J5W
M4M1
BATTERY
+6V
(BT1,BT2,BT3,
BT4,BT5,BT6)
+
0V
(BT1,BT2,BT3,
BT4,BT5,BT6)
-
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
Fig.B(d)
F20DY
CTM
B1 XPRQJ4
B2 0V(BT4,BT5,BT6)
B3 XPRQJ5
+5V(C1,C2,C3) B4 0V(C1,C2,C3)
B5 XPRQJ6
PRQJ6
+24V(A1,A2) B6 XHBK
+24V(B1) B7 0V(D1,D2)
B8 RI2
RI1
B9 RI4
RI3
A10 RI5
B10 RI6
M456PEE1
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
( 単二電池
SIZE C )
A1
A2
A3
A4
A5
A6
A7
A8
A9
PRQJ4
+6V(BT4,BT5,BT6)
PRQJ5
F08DX
CTM
A1 0V(E1,E3,E5) B1 0V(E2,E4,E6)
A2 RO1
B2 RO2
A3 RO3
B3 RO4
A4 RO5
B4 RO6
K107
A660‑4004‑T709
YV1
K108
A660‑2006‑T659
Circuit diagram (LR Mate 200iC 6-axes brake type When H006 is specified)
(LR Mate 200iC/5C H006 is specified)
- 148 -
K109
A660‑4004‑T710
APPENDIX
B-82585EN02
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
(
)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
F06DX
CTM
B1 J5G
B2 J5V
B3 BKCOM1(J5)
M5M1
X‑KEY
BLACK
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A1 J5U
A2 BK(J5)
A3 J5W
J5 MOTOR (βiSR0.2/6000)
M5M
2
3
K110
A660‑4004‑T711
(
)
F06DY
CTM
A1 +6V(BT5) B1 0V(BT5)
A2 PRQJ5 B2 XPRQJ5
A3 +5V(C2) B3 0V(C2)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
)
A1 J6U
A2 BK(J6)
A3 J6W
8
9 +5V(C2)
10 0V(C2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
(
)
2
3
J6V
J6W
RI1
RI2
RI3
RI4
RI5
RI6
A1
A2
A3
A4
A5
A6
( X‑KEY
BLACK )
B1
B2
B3
B4
B5
B6
1
4
J6U
J6G
BK(J6)
1
4
BKCOM1(J6)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
F06DXW
CTM
A1 +6V(BT6) B1 0V(BT6)
A2 PRQJ6 B2 XPRQJ6
A3 +5V(C3) B3 0V(C3)
EE1
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M6BK
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
BKCOM1(J5)
M6M
K112
A660‑4004‑T712
M6P1
X‑KEY
WHITE
1
4
J6 MOTOR (βiSR0.2/6000)
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
BK(J5)
M5P
K111
A660‑2006‑T662
F06DYW
CTM
B1 J6G
B2 J6V
B3 BKCOM1(J6)
M6M1
Y‑KEY
WHITE
J5U
J5G
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M5P1
Y‑KEY
BLACK
1
4
M5BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J5V
J5W
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M6P
K113
A660‑2006‑T664
F12DX
CTM
XHBK
+24V(A1)
+24V(A2)
+24V(B1)
0V(D1)
0V(D2)
8
9 +5V(C3)
10 0V(C3)
4 +6V(BT6)
1
5 XPRQJ6
2
6 PRQJ6
3
7 0V(BT6)
EE
K114
A660‑4004‑T864
1
2
3
4
0V(E1)
0V(E2)
0V(D1)
0V(D2)
5
6
7
8
9
10
RO1
RO2
RO3
RO4
RO5
RO6
11
12
13
14
15
16
A63L‑0002‑0072#20SN
RI1
RI2
17 XHBK
RI3
18 +24V(A1)
RI4
19 +24V(A2)
RI5
20 +24V(B1)
RI6
J4 MOTOR (βiSR0.4/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M4M
2
3
K109
A660‑4004‑T710
J4V
J4W
1
4
J4U
J4G
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M4BK
2
3
BK(J4)
1
4
BKCOM1(J4)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M4P
8
9 +5V(C1)
10 0V(C1)
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
A05B‑1139‑H006
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
R12DX
CRM
0V(E1)
0V(E2)
(0V(E3))
(0V(E4))
(0V(E5))
(0V(E6))
YV2
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
(0V(E3))
(0V(E4))
(0V(E5))
(0V(E6))
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
K116
A660‑2006‑T834
( X‑KEY
BLACK )
RO
A1
A2
A3
A4
0V(E1)
RO1
RO3
RO5
B1
B2
B3
B4
F08DX
CTM
0V(E2)
RO2
RO4
RO6
:可動部用
MOVABLE
- 149 -
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
APPENDIX
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J1V1
J1W1
2
3
BK(J1)
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
(
1
4
J1U1
J1G1
M1BK
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
X‑KEY
BLACK
B-82585EN/02
M2M1
)
A1 J2U1
A2 BK(J2)
A3 J2W1
1 BKCOM1(J1)
4
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
B1 J2G1
B2 J2V1
B3 BKCOM1(J2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J2 MOTOR (βiSR1/6000)
M2M
2
3
K102
A660‑4004‑T822
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
(
Y‑KEY
BLACK
M2P1
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1)
BKCOM1(J1)
J1U1
J1V1
J1W1
J1G1
XROT
RI1
RO1
+5V(A1)
PRQJ1
XPRQJ1
13
14
15
16
17
18
19
20
21
22
23
24
BK(J2) 25
26
J2U1
27
J2V1
28
J2W1
29
J2G1
30
+24V(OT,A1,A2) 31
RI2
32
RO2
33
+5V(B1,B2) 34
35
PRQJ2
36
XPRQJ2
BKCOM1(J2)
BK(J3) 37 BK(J4)
38 BKCOM1(J4)
J3U1
39 J4U
J3V1
40 J4V
J3W1
41 J4W
J3G1
42 J4G
XHBK
43 +24V(B1)
RI3
44 RI4
RO3
45 RO4
+5V(C1,C2,C3) 46 0V(A1)
47 PRQJ4
PRQJ3
48 XPRQJ4
XPRQJ3
G
SG
BKCOM1(J3)
49
50
51
52
53
54
55
56
57
58
59
60
Han 72DD
(2.5SQ 10A)
61 BK(J6)
62 BKCOM1(J6)
J5U
63 J6U
J5V
64 J6V
J5W
65 J6W
J5G
66 J6G
0V(D1,D2) 67 0V(E1,E2,E3,
E4,E5,E6)
RI5
68 RI6
RO5
69 RO6
0V(B1,B2) 70 0V(C1,C2,C3)
71 PRQJ6
PRQJ5
72 XPRQJ6
XPRQJ5
Y‑KEY
WHITE
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
A2 PRQJ2 B2 XPRQJ2
A3 +5V(B1) B3 0V(B1)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
)
M3M1
A1 J3U1
A2 BK(J3)
A3 J3W1
F06DYW
CTM
B1 J3G1
B2 J3V1
B3 BKCOM1(J3)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M2P
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
K101
A660‑8016‑T285
(
X‑KEY
WHITE
)
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
A2 PRQJ3 B2 XPRQJ3
A3 +5V(B2) B3 0V(B2)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M3P1
F20DX
CTM
B1 J4G
B2 J4V
B3 BKCOM1(J4)
B4
J5G
B5 J5U
J5V
B6 BK(J5)
BKCOM1(J5) B7 J5W
J6U
B8 J6G
BK(J6) B9 J6V
A10 J6W
B10 BKCOM1(J6)
J3V1
J3W1
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
1
4
J3U1
J3G1
M3BK
BK(J3)
M3P
8
9 +5V(B2)
10 0V(B2)
K105
A660‑2006‑T790
1 BKCOM1(J2)
4
M3M
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
J2U1
J2G1
J3 MOTOR (βiSR0.5/6000)
2
3
K104
A660‑4004‑T823
BK(J5)
BKCOM1(J5)
BK(J2)
8
9 +5V(B1)
10 0V(B1)
K103
A660‑2006‑T789
1
4
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J2V1
J2W1
1 BKCOM1(J3)
4
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
A7
A8
A9
J4U
BK(J4)
J4W
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M4M1
K106
A660‑4004‑T824
( X‑KEY
BLACK )
BATTERY
+6V
(BT1,BT2,BT3,
BT4,BT5,BT6)
+
0V
(BT1,BT2,BT3,
BT4,BT5,BT6)
F20DY
CTM
B1 XPRQJ4
B2 0V(BT4,BT5,BT6)
B3 XPRQJ5
+5V(C1,C2,C3) B4 0V(C1,C2,C3)
PRQJ6 B5 XPRQJ6
+24V(A1,A2) B6 XHBK
+24V(B1) B7 0V(D1,D2)
B8 RI2
RI1
B9 RI4
RI3
A10 RI5
B10 RI6
M456PEE1
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
( 単二電池
SIZE C )
-
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
A7
A8
A9
PRQJ4
+6V(BT4,BT5,BT6)
PRQJ5
YV1
A1 0V(E1,E3,E5)
A2 RO1
A3 RO3
A4 RO5
F08DX
CTM
B1 0V(E2,E4,E6)
B2 RO2
B3 RO4
B4 RO6
K107
A660‑4004‑T825
K108
A660‑2006‑T791
注)
NOTE)
1. オプション指定時は、A05C‑1139‑B202を参照。
REFER TO A05C‑1139‑B202 IF SPECIFIED OPTIONS.
Fig.B(e)
Circuit diagram (LR Mate 200iC/5L)
- 150 -
A1 J4U
A2 BK(J4)
A3 J5W
F06DX
CTM
B1 J4G
B2 J4V
B3 BKCOM1(J4)
K109
A660‑4004‑T710
APPENDIX
B-82585EN02
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
F06DX
CTM
A1 J5U
B1 J5G
A2 BK(J5) B2 J5V
A3 J5W
B3 BKCOM1(J5)
M5M1
( X‑KEY
BLACK )
J5 MOTOR (βiSR0.2/6000)
M5M
2
3
K110
A660‑4004‑T711
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
(
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
F06DY
CTM
A1 +6V(BT5) B1 0V(BT5)
A2 PRQJ5 B2 XPRQJ5
A3 +5V(C2) B3 0V(C2)
8
9 +5V(C2)
10 0V(C2)
F06DYW
CTM
A1 J6U
B1 J6G
A2 BK(J6) B2 J6V
A3 J6W
B3 BKCOM1(J6)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M6M
2
3
K112
A660‑4004‑T712
(
)
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
F06DXW
CTM
A1 +6V(BT6) B1 0V(BT6)
A2 PRQJ6 B2 XPRQJ6
A3 +5V(C3) B3 0V(C3)
A1
A2
A3
A4
A5
A6
RI1
RI2
RI3
RI4
RI5
RI6
B1
B2
B3
B4
B5
B6
F12DX
CTM
XHBK
+24V(A1)
+24V(A2)
+24V(B1)
0V(D1)
0V(D2)
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
1
4
J6U
J6G
BK(J6)
1
4
BKCOM1(J6)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M6P
8
9 +5V(C3)
10 0V(C3)
K113
A660‑2006‑T664
EE
2
K114
A660‑2006‑T665
1
RI2
3
4 +6V(BT6)
1
5 XPRQJ6
2
6 PRQJ6
3
7 0V(BT6)
A63L‑0002‑0072#12SN
RI1
9 +24V(A2) 8 +24V(A1)
10 +24V(B1) 12 0V(D2) 7 XHBK
RI3
11 0V(D1) 6 RI6
4 RI4
5 RI5
J4 MOTOR (βiSR0.4/6000)
M4M
2
3
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J6V
J6W
M6BK
EE1
BKCOM1(J5)
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M6P1
X‑KEY
WHITE
1
4
J6 MOTOR (βiSR0.2/6000)
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
BK(J5)
M5P
K111
A660‑2006‑T662
M6M1
( Y‑KEY
WHITE )
J5U
J5G
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M5P1
Y‑KEY
BLACK
1
4
M5BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J5V
J5W
J4V
J4W
M4BK
2
3
BK(J4)
1
4
1
4
J4U
J4G
BKCOM1(J4)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M4P
8
9 +5V(C1)
10 0V(C1)
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
A05B‑1139‑H012
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
R12DX
CRM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
YV2
( X‑KEY
BLACK )
A1 RO1
A2 RO2
A3
A4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3
B4
B5
B6
A05B‑1139‑H014
YV2
SOLENOID VALVE
A97L‑0218‑0113#D1
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
A05B‑1139‑H013
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
A05B‑1139‑H015
YV2
SOLENOID VALVE
A97L‑0218‑0113#D2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
:可動部用
MOVABLE
- 151 -
SOLENOID VALVE
A97L‑0218‑0113#D3
SOLENOID VALVE
A97L‑0218‑0113#D3R
LR Mate 200iC/5L
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
APPENDIX
B-82585EN/02
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
J1V1
J1W1
1
4
J1U1
J1G1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M1BK
2
3
BK(J1)
1 BKCOM1(J1)
4
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
A1 J2U1
B1 J2G1
A2 BK(J2) B2 J2V1
A3 J2W1
B3 BKCOM1(J2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M2M1
( X‑KEY
BLACK )
J2 MOTOR (βiSR1/6000)
M2M
2
3
K102
A660‑4004‑T706
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
(
Y‑KEY
BLACK
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
A2 PRQJ2 B2 XPRQJ2
A3 +5V(B1) B3 0V(B1)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M2P1
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
F06DYW
CTM
B1 J3G1
A1 J3U1
A2 BK(J3) B2 J3V1
B3 BKCOM1(J3)
A3 J3W1
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M3M1
( Y‑KEY
WHITE )
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1) 13
14
15
J1U1
16
J1V1
17
J1W1
18
J1G1
19
XROT
20
(RI1)
21
RO1
+5V(A1) 22
PRQJ1 23
XPRQJ1 24
BKCOM1(J1)
BK(J2) 25
26
J2U1
27
J2V1
28
J2W1
29
J2G1
30
+24V(OT,A1,A2) 31
(RI2)
32
RO2
33
+5V(B1,B2) 34
PRQJ2 35
XPRQJ2 36
BKCOM1(J2)
BK(J3) 37 BK(J4)
38 BKCOM1(J4)
J3U1
39 J4U
J3V1
40 J4V
J3W1
41 J4W
J3G1
42 J4G
(XHBK) 43 (+24V(B1))
(RI3)
44 (RI4)
RO3
45 RO4
+5V(C1,C2,C3) 46
0V(A1)
PRQJ3 47 PRQJ4
XPRQJ3 48 XPRQJ4
G
SG
BKCOM1(J3)
49
50
51
52
53
54
55
56
57
58
59
60
Han 72DD
(2.5SQ 10A)
BK(J5) 61 BK(J6)
62 BKCOM1(J6)
J5U
63 J6U
J5V
64 J6V
J5W
65 J6W
J5G
66 J6G
(0V(D1,D2)) 67 0V(E1,E2,E3,
E4,E5,E6)
(RI5)
68 (RI6)
RO5
69 RO6
0V(B1,B2) 70 0V(C1,C2,C3)
PRQJ5 71 PRQJ6
XPRQJ5 72 XPRQJ6
M2P
(
X‑KEY
WHITE
)
1 BKCOM1(J2)
4
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
M3M
2
3
K104
A660‑4004‑T707
J3V1
J3W1
1
4
J3U1
J3G1
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M3BK
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
A2 PRQJ3 B2 XPRQJ3
A3 +5V(B2) B3 0V(B2)
F20DX
CTM
J4U
B1 J4G
BK(J4) B2 J4V
J4W
B3 BKCOM1(J4)
B4
J5G
B5 J5U
J5V
B6 BK(J5)
BKCOM1(J5) B7 J5W
J6U
B8 J6G
BK(J6) B9 J6V
A10 J6W
B10 BKCOM1(J6)
BK(J3)
1 BKCOM1(J3)
4
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M3P1
K101
A660‑8016‑T495
J2U1
J2G1
J3 MOTOR (βiSR0.5/6000)
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
BKCOM1(J5)
BK(J2)
8
9 +5V(B1)
10 0V(B1)
K103
A660‑2006‑T657
1
4
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J2V1
J2W1
M3P
8
9 +5V(B2)
10 0V(B2)
K105
A660‑2006‑T658
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
A7
A8
A9
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
BATTERY
+6V
(BT1,BT2,BT3,
BT4,BT5,BT6)
+
( 単一電池
SIZE D )
0V
(BT1,BT2,BT3,
BT4,BT5,BT6)
GB2
K131
A660‑8016‑T498
-
A
B
C
+6V(BT1,BT2,BT3,
BT4,BT5,BT6)
0V(BT1,BT2,BT3,
BT4,BT5,BT6)
A63L‑0001‑0648#610SL3SJ
GB2
A
B
C
+6V(BT1,BT2,BT3,
BT4,BT5,BT6)
0V(BT1,BT2,BT3,
BT4,BT5,BT6)
A63L‑0001‑0648#210SL3PJ
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
Fig.B(f)
F20DY
CTM
B1 XPRQJ4
B2 0V(BT4,BT5,BT6)
B3 XPRQJ5
+5V(C1,C2,C3) B4 0V(C1,C2,C3)
PRQJ6 B5 XPRQJ6
(+24V(A1,A2)) B6 (XHBK)
(+24V(B1)) B7 (0V(D1,D2))
(RI1)
B8 (RI2)
(RI3)
B9 (RI4)
A10 (RI5)
B10 (RI6)
M456PEE1
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
A1
A2
A3
A4
A5
A6
A7
A8
A9
PRQJ4
+6V(BT4,BT5,BT6)
PRQJ5
YV1
A1 0V(E1,E3,E5)
A2 RO1
A3 RO3
A4 RO5
F08DX
CTM
B1 0V(E2,E4,E6)
B2 RO2
B3 RO4
B4 RO6
K107
A660‑4004‑T709
K108
A660‑2006‑T659
Circuit diagram (LR Mate 200iC/5WP)
- 152 -
F06DX
CTM
B1 J4G
A1 J4U
A2 BK(J4) B2 J4V
B3 BKCOM1(J4)
A3 J5W
M4M1
K106
A660‑4004‑T708
K109
A660‑4004‑T710
APPENDIX
B-82585EN02
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M5M1
(
X‑KEY
BLACK
)
A1 J5U
A2 BK(J5)
A3 J5W
F06DX
CTM
B1 J5G
B2 J5V
B3 BKCOM1(J5)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J5 MOTOR (βiSR0.2/6000)
M5M
2
3
K110
A660‑4004‑T711
M5BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
(
Y‑KEY
BLACK
F06DY
CTM
A1 +6V(BT5) B1 0V(BT5)
A2 PRQJ5
B2 XPRQJ5
A3 +5V(C2) B3 0V(C2)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M5P1
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
( Y‑KEY
WHITE )
M6M1
A1 J6U
A2 BK(J6)
A3 J6W
F06DYW
CTM
B1 J6G
B2 J6V
B3 BKCOM1(J6)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M5P
(
)
1
4
J5U
J5G
1 BKCOM1(J5)
4
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
J6 MOTOR (βiSR0.2/6000)
M6M
2
3
K112
A660‑4004‑T712
J6V
J6W
1
4
J6U
J6G
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M6BK
F06DXW
CTM
A1 +6V(BT6) B1 0V(BT6)
A2 PRQJ6
B2 XPRQJ6
A3 +5V(C3) B3 0V(C3)
BK(J6)
1 BKCOM1(J6)
4
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M6P1
X‑KEY
WHITE
BK(J5)
8
9 +5V(C2)
10 0V(C2)
K111
A660‑2006‑T662
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
J5V
J5W
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M6P
K113
A660‑2006‑T664
8
9 +5V(C3)
10 0V(C3)
4 +6V(BT6)
1
5 XPRQJ6
2
6 PRQJ6
3
7 0V(BT6)
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J4 MOTOR (βiSR0.4/6000)
M4M
2
3
K109
A660‑4004‑T710
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J4V
J4W
1
4
J4U
J4G
M4BK
2
3
BK(J4)
1 BKCOM1(J4)
4
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M4P
8
9 +5V(C1)
10 0V(C1)
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
A05B‑1139‑H032
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
R12DX
CRM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
YV2
( X‑KEY
BLACK )
A1 RO1
A2 RO2
A3
A4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3
B4
B5
B6
SOLENOID VALVE
A97L‑0218‑0113#D1
A05B‑1139‑H033
YV2
A1 RO1
A2 RO2
A3 RO3
A4 RO4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3 0V(E3)
B4 0V(E4)
B5
B6
LR Mate 200iC/5WP
SOLENOID VALVE
A97L‑0218‑0113#D2
:可動部用
MOVABLE
- 153 -
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
APPENDIX
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J1V1
J1W1
M1BK
2
3
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
BK(J1)
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
B-82585EN/02
M2M1
)
A1 J2U1
A2 BK(J2)
A3 J2W1
1
4
1
4
J1U1
J1G1
BKCOM1(J1)
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
B1 J2G1
B2 J2V1
B3 BKCOM1(J2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J2 MOTOR (βiSR1/6000)
M2M
2
3
K102
A660‑4004‑T706
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
(
Y‑KEY
BLACK
M2P1
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1) 13
14
15
J1U1
16
J1V1
17
J1W1
18
J1G1
19
XROT
20
RI1
21
RO1
+5V(A1) 22
PRQJ1 23
XPRQJ1 24
BKCOM1(J1)
BK(J2) 25
26
J2U1
27
J2V1
28
J2W1
29
J2G1
30
+24V(OT,A1,A2) 31
RI2
32
RO2
33
+5V(B1,B2) 34
35
PRQJ2
36
XPRQJ2
BKCOM1(J2)
BK(J3) 37 (BK(X))
38 (BKCOM1(X))
J3U1
39 (XU)
J3V1
40 (XV)
J3W1
41 (XW)
J3G1
42 (XG)
XHBK
43 +24V(B1)
RI3
44 RI4
RO3
45 RO4
+5V(C1,C2) 46 0V(A1)
PRQJ3 47 (PRQX)
XPRQJ3 48 (XPRQX)
G
SG
BKCOM1(J3)
49
50
51
52
53
54
55
56
57
58
59
60
Han 72DD
(2.5SQ 10A)
(BK(J4)) 61 (BK(J5))
62 (BKCOM1(J5))
J4U
63 J5U
J4V
64 J5V
J4W
65 J5W
J4G
66 J5G
0V(D1,D2) 67 0V(E1,E2,E3,
E4,E5,E6)
RI5
68 RI6
RO5
69 RO6
0V(B1,B2) 70 0V(C1,C2)
PRQJ4 71 PRQJ5
XPRQJ4 72 XPRQJ5
Y‑KEY
WHITE
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
A2 PRQJ2
B2 XPRQJ2
A3 +5V(B1) B3 0V(B1)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
)
M3M1
A1 J3U1
A2 BK(J3)
A3 J3W1
F06DYW
CTM
B1 J3G1
B2 J3V1
B3 BKCOM1(J3)
K101
A660‑8016‑T285
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
(
X‑KEY
WHITE
)
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
A2 PRQJ3
B2 XPRQJ3
A3 +5V(B2) B3 0V(B2)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
F20DX
CTM
B1 (XG)
B2 (XV)
B3 (BKCOM1(X))
B4
J4G
B5 J4U
J4V
B6 (BK(J4))
(BKCOM1(J4)) B7 J4W
J5U
B8 J5G
(BK(J5)) B9 J5V
A10 J5W
B10 (BKCOM1(J5))
K105
A660‑2006‑T658
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
A7
A8
A9
(XU)
(BK(X))
(XW)
K106
A660‑4004‑T810
BATTERY
+6V
(BT1,BT2,BT3,
BT4,BT5)
+
M456PEE1 F20DY
CTM
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
( 単二電池
SIZE C )
0V
(BT1,BT2,BT3,
BT4,BT5)
M2P
-
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
A7
A8
A9
(PRQX)
B1 (XPRQX)
B2 0V(BT4,BT5)
B3 XPRQJ4
B4 0V(C1,C2)
B5 XPRQJ5
+24V(A1,A2) B6 XHBK
+24V(B1) B7 0V(D1,D2)
RI1
B8 RI2
RI3
B9 RI4
A10 RI5
B10 RI6
+6V(BT4,BT5)
PRQJ4
+5V(C1,C2)
PRQJ5
F08DX
CTM
A1 0V(E1,E3,E5) B1 0V(E2,E4,E6)
A2 RO1
B2 RO2
A3 RO3
B3 RO4
A4 RO5
B4 RO6
K107
A660‑4004‑T811
YV1
K108
A660‑2006‑T659
注)
NOTE)
1. (***):使用されていない信号。
SIGNALS ARE NOT USED.
2. オプション指定時は、A05C‑1139‑B202を参照。
REFER TO A05C‑1139‑B202 IF SPECIFIED OPTIONS.
Fig. B(g) CIRCUIT DIAGRAM (LR Mate 200iC/5H 3-axes brake type)
- 154 -
1
4
1
4
J2U1
J2G1
BKCOM1(J2)
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
J3 MOTOR (βiSR0.5/6000)
M3M
2
3
K104
A660‑4004‑T707
M3P1
BK(J2)
8
9 +5V(B1)
10 0V(B1)
K103
A660‑2006‑T657
J3V1
J3W1
M3BK
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
(BKCOM1(J4))
J2V1
J2W1
BK(J3)
M3P
8
9 +5V(B2)
10 0V(B2)
1
4
1
4
J3U1
J3G1
BKCOM1(J3)
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
APPENDIX
B-82585EN02
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M4M1H
(
X‑KEY
BLACK
)
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
A1 J4U
A2
A3 J4W
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
F06DX
CTM
B1 J4G
B2 J4V
B3
M4M
2
3
K110
A660‑2006‑T771
F06DY
CTM
A1 +6V(BT4) B1 0V(BT4)
B2 XPRQJ4
A2 PRQJ4
A3 +5V(C1) B3 0V(C1)
(
)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
M5M1H
( Y‑KEY
WHITE )
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
A1 J5U
A2
A3 J5W
F06DYW
CTM
B1 J5G
B2 J5V
B3
F06DXW
CTM
A1 +6V(BT5) B1 0V(BT5)
B2 XPRQJ5
A2 PRQJ5
A3 +5V(C2) B3 0V(C2)
(
)
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
EE1
)
A1
A2
A3
A4
A5
A6
RI1
RI2
RI3
RI4
RI5
RI6
B1
B2
B3
B4
B5
B6
F12DX
CTM
XHBK
+24V(A1)
+24V(A2)
+24V(B1)
0V(D1)
0V(D2)
8
9 +5V(C1)
10 0V(C1)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
YV2
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
YV2
( X‑KEY
BLACK )
A1 RO1
A2 RO2
A3
A4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3
B4
B5
B6
2
3
YV2
A1 RO1
A2 RO2
A3 RO3
A4 RO4
A5
A6
M5P
1
4
8
9 +5V(C2)
10 0V(C2)
EE
2
K114
A660‑2006‑T665
J5U
J5G
1
RI2
3
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
A63L‑0002‑0072#12SN
RI1
9 +24V(A2) 8 +24V(A1)
10 +24V(B1) 12 0V(D2) 7 XHBK
RI3
11 0V(D1) 6 RI6
4 RI4
5 RI5
A05B‑1139‑H004
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
SOLENOID VALVE
A97L‑0218‑0113#D3
A05B‑1139‑H005
YV2
SOLENOID VALVE
A97L‑0218‑0113#D2
J5V
J5W
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
K113
A660‑2006‑T774
A05B‑1139‑H003
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3 0V(E3)
B4 0V(E4)
B5
B6
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
M5M
YV2
SOLENOID VALVE
A97L‑0218‑0113#D1
J4U
J4G
J5 MOTOR (βiSR0.2/6000)
K112
A660‑2006‑T773
A05B‑1139‑H002
R12DX
CRM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
1
4
M4P
K111
A660‑2006‑T772
M5P1H
X‑KEY
WHITE
J4V
J4W
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M4P1H
Y‑KEY
BLACK
J4 MOTOR (βiSR0.2/6000)
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
:可動部用
MOVABLE
- 155 -
SOLENOID VALVE
A97L‑0218‑0113#D3R
LR Mate 200iC/5H (3BK)
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
APPENDIX
J1 MOTOR (βiSR1/6000)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
M1M
2
3
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
J1V1
J1W1
2
3
BK(J1)
M1P
8
9 +5V(A1)
10 0V(A1)
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M2M1
(
1
4
J1U1
J1G1
M1BK
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
X‑KEY
BLACK
B-82585EN/02
)
A1 J2U1
A2 BK(J2)
A3 J2W1
1 BKCOM1(J1)
4
4 +6V(BT1)
1
5 XPRQJ1
2
6 PRQJ1
3
7 0V(BT1)
F06DX
CTM
B1 J2G1
B2 J2V1
B3 BKCOM1(J2)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J2 MOTOR (βiSR1/6000)
M2M
2
3
K102
A660‑4004‑T706
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M2P1
( Y‑KEY
BLACK )
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
(
J1 CONNECTOR PANEL
RMP
1
2
3
4
5
6
7
8
9
10
11
12
BK(J1)
BKCOM1(J1)
J1U1
J1V1
J1W1
J1G1
XROT
RI1
RO1
+5V(A1)
PRQJ1
XPRQJ1
13
14
15
16
17
18
19
20
21
22
23
24
25
26
J2U1
27
J2V1
28
J2W1
29
J2G1
30
+24V(OT,A1,A2) 31
RI2
32
RO2
33
+5V(B1,B2) 34
PRQJ2
35
XPRQJ2
36
BK(J2)
BKCOM1(J2)
BK(J3) 37
38
J3U1
39
J3V1
40
J3W1
41
J3G1
42
XHBK
43
RI3
44
RO3
45
+5V(C1,C2) 46
PRQJ3
47
XPRQJ3
48
G
SG
BKCOM1(J3)
49
50
(XU)
51
(XV)
52
(XW)
53
(XG)
54
+24V(B1) 55
RI4
56
RO4
57
0V(A1) 58
(PRQX)
59
(XPRQX) 60
(BK(X))
(BKCOM1(X))
Han 72DD
(2.5SQ 10A)
BK(J4) 61 BK(J5)
62 BKCOM1(J5)
J4U
63 J5U
J4V
64 J5V
J4W
65 J5W
J4G
66 J5G
0V(D1,D2) 67 0V(E1,E2,E3,
E4,E5,E6)
RI5
68 RI6
RO5
69 RO6
0V(B1,B2) 70 0V(C1,C2)
PRQJ4
71 PRQJ5
XPRQJ4
72 XPRQJ5
Y‑KEY
WHITE
F06DY
CTM
A1 +6V(BT2) B1 0V(BT3)
A2 PRQJ2
B2 XPRQJ2
A3 +5V(B1) B3 0V(B1)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
)
M3M1
A1 J3U1
A2 BK(J3)
A3 J3W1
F06DYW
CTM
B1 J3G1
B2 J3V1
B3 BKCOM1(J3)
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
K101
A660‑8016‑T285
( X‑KEY
WHITE )
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
F06DXW
CTM
A1 +6V(BT3) B1 0V(BT3)
A2 PRQJ3
B2 XPRQJ3
A3 +5V(B2) B3 0V(B2)
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M3P1
F20DX
CTM
B1 (XG)
B2 (XV)
(BKCOM1(X))
B3
B4
J4G
B5 J4U
J4V
B6 BK(J4)
BKCOM1(J4) B7 J4W
J5U
B8 J5G
BK(J5) B9 J5V
A10 J5W
B10 BKCOM1(J5)
K105
A660‑2006‑T658
( X‑KEY
BLACK )
A1
A2
A3
A4
A5
A6
A7
A8
A9
(XU)
(BK(X))
(XW)
K106
A660‑4004‑T810
BATTERY
+
0V
(BT1,BT2,BT3,
BT4,BT5)
M456PEE1 F20DY
CTM
A63L‑0002‑0066#R20DY
A63L‑0002‑0066#CRM
( 単二電池
SIZE C )
-
( Y‑KEY
BLACK )
A63L‑0002‑0066#R08DX
A63L‑0002‑0066#CRM
( X‑KEY
BLACK )
B1 (XPRQX)
B2 0V(BT4,BT5)
B3 XPRQJ4
B4 0V(C1,C2)
PRQJ5
B5 XPRQJ5
+24V(A1,A2) B6 XHBK
+24V(B1) B7 0V(D1,D2)
RI1
B8 RI2
RI3
B9 RI4
A10 RI5
B10 RI6
A1
A2
A3
A4
A5
A6
A7
A8
A9
(PRQX)
+6V(BT4,BT5)
PRQJ4
+5V(C1,C2)
F08DX
CTM
A1 0V(E1,E3,E5) B1 0V(E2,E4,E6)
A2 RO1
B2 RO2
A3 RO3
B3 RO4
A4 RO5
B4 RO6
K107
A660‑4004‑T811
YV1
K108
A660‑2006‑T659
注)
NOTE)
1. (***):使用されていない信号。
SIGNALS ARE NOT USED.
2. オプション指定時は、A05C‑1139‑B202を参照。
REFER TO A05C‑1139‑B202 IF SPECIFIED OPTIONS.
Fig. B(h) CIRCUIT DIAGRAM (LR Mate 200iC/5H 6-axes brake type)
- 156 -
J2U1
J2G1
1 BKCOM1(J2)
4
4 +6V(BT2)
1
5 XPRQJ2
2
6 PRQJ2
3
7 0V(BT2)
J3 MOTOR (βiSR0.5/600
M3M
2
3
K104
A660‑4004‑T707
M456M1
A63L‑0002‑0066#R20DX
A63L‑0002‑0066#CRM
+6V
(BT1,BT2,BT3,
BT4,BT5)
M2P
J3V1
J3W1
1
4
J3U1
J3G1
M3BK
2
3
BKCOM1(J4)
BK(J2)
8
9 +5V(B1)
10 0V(B1)
K103
A660‑2006‑T657
1
4
M2BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J2V1
J2W1
BK(J3)
M3P
8
9 +5V(B2)
10 0V(B2)
1 BKCOM1(J3)
4
4 +6V(BT3)
1
5 XPRQJ3
2
6 PRQJ3
3
7 0V(BT3)
APPENDIX
B-82585EN02
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
A63L‑0002‑0066#R06DX
A63L‑0002‑0066#CRM
M4M1
( X‑KEY
BLACK )
A1 J4U
A2 BK(J4)
A3 J4W
F06DX
CTM
B1 J4G
B2 J4V
B3 BKCOM1(J4)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
J4 MOTOR (βiSR0.2/6000)
M4M
2
3
K110
A660‑4004‑T812
F06DY
CTM
A1 +6V(BT4) B1 0V(BT4)
A2 PRQJ4
B2 XPRQJ4
A3 +5V(C1) B3 0V(C1)
A63L‑0002‑0066#R06DYW
A63L‑0002‑0066#CRM
M5M1
(
Y‑KEY
WHITE
)
A1 J5U
A2 BK(J5)
A3 J5W
F06DYW
CTM
B1 J5G
B2 J5V
B3 BKCOM1(J5)
8
9 +5V(C1)
10 0V(C1)
A63L‑0001‑0865#1
A63L‑0001‑0864#CS
A63L‑0002‑0066#R12DX
A63L‑0002‑0066#CRM
(
X‑KEY
BLACK
EE1
)
A1
A2
A3
A4
A5
A6
RI1
RI2
RI3
RI4
RI5
RI6
B1
B2
B3
B4
B5
B6
F12DX
CTM
XHBK
+24V(A1)
+24V(A2)
+24V(B1)
0V(D1)
0V(D2)
M5M
2
3
A1
A2
A3
A4
A5
A6
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
R12DX
CRM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
YV2
( X‑KEY
BLACK )
A1 RO1
A2 RO2
A3
A4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3
B4
B5
B6
A1 RO1
A2 RO2
A3 RO3
A4 RO4
A5
A6
F12DX
CTM
B1 0V(E1)
B2 0V(E2)
B3 0V(E3)
B4 0V(E4)
B5
B6
J5U
J5G
1 BKCOM1(J5)
4
EE
2
1
RI2
3
4 +6V(BT5)
1
5 XPRQJ5
2
6 PRQJ5
3
7 0V(BT5)
A63L‑0002‑0072#12SN
RI1
9 +24V(A2) 8 +24V(A1)
10 +24V(B1) 12 0V(D2) 7 XHBK
RI3
11 0V(D1) 6 RI6
4 RI4
5 RI5
A05B‑1139‑H004
A1
A2
A3
A4
A5
A6
SOLENOID VALVE
A97L‑0218‑0113#D1
8
9 +5V(C2)
10 0V(C2)
K114
A660‑2006‑T665
YV2
RO1
RO2
RO3
RO4
RO5
RO6
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
B1
B2
B3
B4
B5
B6
F12DX
CTM
0V(E1)
0V(E2)
0V(E3)
0V(E4)
0V(E5)
0V(E6)
SOLENOID VALVE
A97L‑0218‑0113#D3
A05B‑1139‑H005
YV2
SOLENOID VALVE
A97L‑0218‑0113#D2
1
4
BK(J5)
M5P
K113
A660‑2006‑T774
A05B‑1139‑H003
YV2
J5V
J5W
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
A05B‑1139‑H002
YV2
4 +6V(BT4)
1
5 XPRQJ4
2
6 PRQJ4
3
7 0V(BT4)
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
M5BK
F06DXW
CTM
A1 +6V(BT5) B1 0V(BT5)
A2 PRQJ5
B2 XPRQJ5
A3 +5V(C2) B3 0V(C2)
1 BKCOM1(J4)
4
J5 MOTOR (βiSR0.2/6000)
K112
A660‑4004‑T813
M5P1
( X‑KEY
WHITE )
BK(J4)
M4P
K111
A660‑2006‑T772
2
3
A63L‑0002‑0066#R06DXW
A63L‑0002‑0066#CRM
J4U
J4G
A63L‑0001‑0848#E10SL1
A63L‑0001‑0850
M4P1
( Y‑KEY
BLACK )
1
4
M4BK
2
3
A63L‑0002‑0066#R06DY
A63L‑0002‑0066#CRM
J4V
J4W
A63L‑0001‑0865#2
A63L‑0001‑0864#CS
A1
A2
A3
A4
A5
A6
:可動部用
MOVABLE
- 157 -
RO1
RO2
RO3
RO4
RO5
RO6
SOLENOID VALVE
A97L‑0218‑0113#D3R
LR Mate 200iC/5H (5BK)
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
APPENDIX
B-82585EN/02
J1 connector plate
AIR 1
J3 arm
J1 connector plate
AIR 2
J3 casing
Exhaust port
RO1
RO2
RO2
RO1
Fig. B(i)
Air pressure diagram
(Double solenoid valve×1 A05B-1139-H002,H012,H017,H022,H032 is specified)
J1 connector plate
AIR 1
J3 arm
J1 connector plate
AIR 2
J3 casing
Exhaust port
RO3
RO1
RO2
RO4
RO4
RO3
RO2
RO1
Fig. B(j)
Air pressure diagram
(Double solenoid valve×2 A05B-1139-H003,H013,H018,H023,H033 is specified)
- 158 -
B-82585EN02
APPENDIX
B.CIRCUIT DIAGRAM, AIR PRESSURE DIAGRM
J1 connector plate
AIR 1
J3 arm
J1 connector plate
AIR 2
J3 casing
Exhaust port
RO5
RO3
RO6
RO4
RO1
RO2
RO6
RO5
RO4
RO3
RO1
RO2
Fig. B(k) Air pressure diagram
(Double solenoid valve×3 A05B-1139-H004,H014,H024 is specified)
J1 connector plate
AIR 1
J3 arm
J1 connector plate
AIR 2
J3 casing
Exhaust port
RO5
RO3
RO1
RO2
RO4
RO6
RO6
RO5
RO4
RO3
RO2
RO1
Fig. B(l) Air pressure diagram
(Double solenoid valve×3R A05B-1139-H005,H015 is specified)
- 159 -
C.PERIODIC MAINTENANCE TABLE
C
APPENDIX
B-82585EN/02
PERIODIC MAINTENANCE TABLE
FANUC Robot LR Mate 200iC, LR Mate 200iC/5C, /5L, /5LC Periodic Maintenance Table
Working time (H)
Check
time
Items
1
Check the exposed
connector.(loosening)
4800
5760
6720
7680
―
○
○
○
0.2H
―
○
○
○
3 bolt.
2.0H
―
○
○
○
4 Remove spatter and dust etc.
1.0H
―
○
0.1H
―
Tighten the cover and main
Mechanical unit
2
years
0.2H
2 Tighten the end effector bolt.
5
Replacing battery.
(if built-in batteries are
specified)
Replacing battery.
(if external batteries are
specified)
6 Greasing the reducers.
Replacing cable of mechanical
7 unit *1
○
○
○
○
0.5H
○
○
●
○
8640
9600 10560
○
○
○
●
0.1H
●
14ml
4.0H
―
8 teach pendant cable
0.2H
―
9 Cleaning the ventilator
0.2H
―
10 Check the source voltage *1
0.2H
―
11 Replacing battery *1
0.1H
―
Check the robot cable and
Control unit
1
First
Oil
6
9
3
Grease check
months months months years
amount 320
960
1920 2880 3840
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
*1 Refer to manual of controller.
*2 ●: requires exchange of parts
○: does not require exchange of parts
- 160 -
○
○
○
○
C.PERIODIC MAINTENANCE TABLE
APPENDIX
B-82585EN/02
3
4
5
6
7
8
years
years
years
years
years
years
11520 12480 13440 14400 15360 16320 17280 18240 19200 20160 21120 22080 23040 24000 24960 25920 26880 27840 28800 29760 30720
Item
○
○
○
○
○
1
○
○
○
○
○
2
○
○
○
○
○
3
○
○
○
○
●
○
○
○
○
●
○
○
○
○
●
○
○
○
○
●
○
○
○
4
○
●
●
●
Overhaul
5
●
●
●
6
7
●
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
8
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
9
○
○
○
○
○
○
○
○
○
○
10
11
●
- 161 -
C.PERIODIC MAINTENANCE TABLE
APPENDIX
B-82585EN/02
FANUC Robot LR Mate 200iC/5WP
Working time (H)
Items
Mechanical unit
Check the exposed
1
First
Check
Oil
6
9
3
time Grease check
months months months years
amount 320
960
1920 2880 3840
2
years
4800
5760
6720
7680
1 connector.(loosening)
0.2H
―
○
○
○
2 Tighten the end effector bolt.
0.2H
―
○
○
○
3 Tighten the cover and main bolt. 2.0H
―
○
○
○
4 Remove spatter and dust etc.
―
○
Replacing battery.(external
1.0H
5 battery)
0.1H
6 Greasing the reducers.
0.5H
14ml
4.0H
―
8 pendant cable
0.2H
―
9 Cleaning the ventilator
0.2H
―
10 Check the source voltage *1
0.2H
―
11 Replacing battery *1
0.1H
―
Replacing cable of mechanical
7 unit *
Check the robot cable and teach
Control unit
Periodic Maintenance Table
○
○
○
○
○
○
○
8640
9600 10560
○
○
○
●
●
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
*1 Refer to manual of controller.
*2 ●: requires exchange of parts
○: does not require exchange of parts
- 162 -
○
○
○
○
APPENDIX
B-82585EN/02
3
years
4
years
11520 12480 13440 14400 15360
Item
○
1
○
2
○
3
○
○
○
4
○
5
Overhaul
●
6
7
○
○
○
○
8
○
○
○
○
9
○
○
10
11
- 163 -
C.PERIODIC MAINTENANCE TABLE
C.PERIODIC MAINTENANCE TABLE
APPENDIX
B-82585EN/02
FANUC Robot LR Mate 200iC/5H
Working time (H)
Check
time
Items
1
Check the exposed
connector.(loosening)
2
years
4800
5760
6720
7680
―
○
○
○
0.2H
―
○
○
○
3 bolt.
2.0H
―
○
○
○
4 Remove spatter and dust etc.
1.0H
―
○
0.1H
―
Tighten the cover and main
Mechanical unit
1
First
Oil
6
9
3
Grease check
months months months years
amount 320
960
1920 2880 3840
0.2H
2 Tighten the end effector bolt.
5
Replacing battery.
(if built-in batteries are
specified)
Replacing battery.
(if external batteries are
specified)
6 Greasing the reducers.
4.0H
―
8 teach pendant cable
0.2H
―
9 Cleaning the ventilator
0.2H
―
10 Check the source voltage *1
0.2H
―
11 Replacing battery *1
0.1H
―
Check the robot cable and
○
○
○
○
○
●
○
8640
9600 10560
○
○
○
●
●
12ml
Replacing cable of mechanical
○
0.1H
0.5H
7 unit *
Control unit
Periodic Maintenance Table
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
*1 Refer to manual of controller.
*2 ●: requires exchange of parts
○: does not require exchange of parts
- 164 -
○
○
○
○
C.PERIODIC MAINTENANCE TABLE
APPENDIX
B-82585EN/02
3
4
5
6
7
8
years
years
years
years
years
years
11520 12480 13440 14400 15360 16320 17280 18240 19200 20160 21120 22080 23040 24000 24960 25920 26880 27840 28800 29760 30720
Item
○
○
○
○
○
1
○
○
○
○
○
2
○
○
○
○
○
3
○
○
○
○
●
○
○
○
○
●
○
○
○
○
●
○
○
○
○
●
○
○
○
4
○
●
●
●
Overhaul
5
●
●
●
6
7
●
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
8
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
9
○
○
○
○
○
○
○
○
○
○
10
11
●
- 165 -
D.MOUNTING BOLT TORQUE LIST
D
APPENDIX
B-82585EN/02
MOUNTING BOLT TORQUE LIST
NOTE
When applying Loctite to the important bolt tightening
points, make sure that it is applied to the entire
longitudinal portion in the engaging section of the
female threads. If it is applied to the male threads, the
bolts may be loosened because sufficient effects
cannot be obtained. Remove the dust within the bolts
and taps and wipe oil off the engaging section. Make
sure that there is no solvent in the taps.
- 166 -
APPENDIX
B-82585EN/02
D.MOUNTING BOLT TORQUE LIST
If no tightening torque is specified for a bolt, tighten it according to this
table.
Recommended bolt tightening torques
Nominal
diameter
M3
M4
M5
M6
M8
M10
M12
(M14)
M16
(M18)
M20
(M22)
M24
(M27)
M30
M36
Unit: Nm (kgf-cm)
Hexagon socket head bolt
(Steel in strength category 12.9)
Hexagon socket head bolt
(stainless)
Tightening torque
Upper limit
Lower limit
Tightening torque
Upper limit
Lower limit
1.8(18)
4.0(41)
7.9(81)
14(140)
32(330)
66(670)
110(1150)
180(1850)
270(2800)
380(3900)
530(5400)
730(7450)
930(9500)
1400(14000)
1800(18500)
3200(33000)
1.3(13)
2.8(29)
5.6(57)
9.6(98)
23(230)
46(470)
78(800)
130(1300)
190(1900)
260(2700)
370(3800)
510(5200)
650(6600)
960(9800)
1300(13000)
2300(23000)
0.76(7.7)
1.8(18)
3.4(35)
5.8(60)
14(145)
27(280)
48(490)
76(780)
120 (1200)
160(1650)
230(2300)
-
- 167 -
0.53(5.4)
1.3(13)
2.5(25)
4.1(42)
9.8(100)
19(195)
33(340)
53(545)
82(840)
110(1150)
160(1600)
-
Hexagon socket head boss
bolt
Hexagon socket head flush
bolt (steel in strength
category 12.9)
Tightening torque
Upper limit
Lower limit
1.8(18)
4.0(41)
7.9(81)
14(140)
32(330)
-
1.3(13)
2.8(29)
5.6(57)
9.6(98)
23(230)
-
INDEX
B-82585EN/02
INDEX
<Number>
<M>
1.5-year (5,760 hours) checks ...........................................7
MAINTENANCE TOOLS ............................................... 9
1-year (3,840 hours) checks ..............................................7
MASTERING ............................................................... 120
2-year (7,680 hours) checks (LR Mate 200iC
MOUNTING BOLT TORQUE LIST ........................... 166
/5WP) 4-year (15,360 hours) checks (LR Mate
<O>
200iC, LR Mate 200iC/5L , /5C, /5LC, /5H) ...................8
OVERVIEW ................................................................... 24
3-month (960 hours) checks ..............................................5
<P>
<A>
PERIODIC MAINTENANCE ........................................ 11
ADJUSTING TENSION OF BELT .............................. 118
PERIODIC MAINTENANCE TABLE ........................ 160
ADJUSTMENTS .......................................................... 117
PREFACE...................................................................... p-1
<B>
<R>
BACKLASH MEASUREMENT .................................... 32
REPLACING CABLES.................................................. 89
<C>
REPLACING J1-AXIS MOTOR.................................... 41
CABLE AND AIR TUBE REPLACEMENT ................. 95
REPLACING J1-AXIS REDUCER................................ 43
CABLE FORMING ........................................................ 92
REPLACING J2-AXIS MOTOR.................................... 49
CABLE WIRING............................................................ 90
REPLACING J2-AXIS REDUCER................................ 53
CHECKS AND MAINTENANCE ...................................1
REPLACING J3 BELT................................................... 82
CIRCUIT DIAGRAM, AIR PRESSURE
REPLACING J3-AXIS MOTOR.................................... 57
DIAGRM ...................................................................... 141
REPLACING J3-AXIS REDUCER................................ 59
REPLACING J4-AXIS MOTOR.................................... 62
<D>
REPLACING J4-AXIS REDUCER................................ 64
DAILY CHECKS..............................................................2
REPLACING J5/J6 BELT .............................................. 84
<F>
REPLACING J5-AXIS MOTOR.................................... 68
FAILURES, CAUSES AND MEASURES..................... 25
REPLACING J5-AXIS REDUCER................................ 71
FIGURE OF DRIVE MECHANISM .............................. 38
REPLACING J6-AXIS MOTOR.................................... 74
First 1-Month (320 hours operating) Check ......................5
REPLACING J6-AXIS REDUCER................................ 80
FIXTURE POSITION MASTER.................................. 122
REPLACING PARTS..................................................... 36
REPLACING SOLENOID VALVE............................... 86
<G>
REPLACING THE BATTERIES (1-YEAR
Grease replacement procedure of the J1-axis
CHECKS (battery built-in type)) (1.5-YEAR
reducer............................................................................. 17
CHECKS (external battery type))................................... 12
Grease replacement procedure of the J2-axis
REPLACING WRIST UNIT .......................................... 77
reducer............................................................................. 18
REPLAING AIR TUBE ............................................... 110
Grease replacement procedure of the J3-axis
REPLAING CABLE K101 and Air tube
reducer............................................................................. 19
(Connector plate to J2 base)............................................ 95
Grease replacement procedure of the J4-axis
REPLAING CABLE K102, K103, K104, K105,
reducer............................................................................. 20
K109, K110, K111, K112, K113 .................................. 108
Grease replacement procedure of the J5/J6-axis
REPLAING CABLE K104........................................... 109
reducer............................................................................. 22
REPLAING CABLE K106, K107, K108 and
Air tube (J2 base to J3 casing) ...................................... 102
i-1
INDEX
B-82585EN/02
REPLENISH THE GREASE OF THE DRIVE
MECHANISM (4 years (11,520 hours) checks) ............. 15
RESETTING ALARMS AND PREPARING
FOR MASTERING....................................................... 121
<S>
SAFETY PRECAUTIONS ............................................ s-1
SEALANT APPLICATION............................................ 88
SPARE PARTS LIST.................................................... 131
<T>
TROUBLESHOOTING .................................................. 23
i-2
Revision Record
FANUC Robot LR Mate 200iC MECHANICAL UNIT MAINTENANCE MANUAL (B-82585EN)
・ Addition of LR Mate 200iC/5L,5LC,5WP,5C
02
Feb.,2008 ・ Addition of Air pressure diagram
・ Revice
01
Nov., 2007
Edition
Date
Contents
Edition
Date
Contents