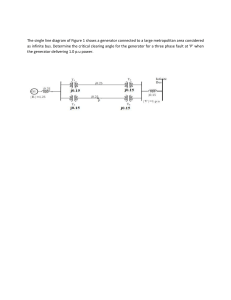
Faculty of Engineering Ain Shams University – ICHEP Energy and Renewable Energy EPM 222 Electrical Machines (2) Induction Motor Simulation on MATLAB/Simulink Submitted by Ziad Ahmed Oraby 20P3700 Submitted to Dr. Ahmed Mohy Eng. Amr Saleh May 2023 INTRODUTION A plant consisting of a resistive and motor load is fed at 2400 V from a distribution 25 kV network through a 6 MVA 25/2.4 kV Wye-Delta transformer and from an emergency synchronous generator/diesel engine unit. The 25 kV network is modeled by a R-L equivalent source with a shortcircuit level of 1000 MVA and with a 5 MW load. A three-phase to ground fault occurs on the 25 kV system, causing opening of the 25kV circuit breaker. Required: To examine the system performance of the following cases: (Run the simulations for 30 seconds) Case (1): The system runs normally as depicted in the figure. Case (2): The resistive load power is reduced by 50%. Case (3): The resistive load power is increased by 50%. Case (4): The generator reference speed is varied by ±3%. Case (5): The generator reference voltage is varied by ±5%. I. Tabulate the Induction motor parameters values (resistance, inductance, total inertia, friction torques coefficient) II. For the cases above, run the Simulink file and after reaching a steady-state condition, determine the following: 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Tabulate the steady state values of the above measurements. 3. Comment on the motor speed and torque variation. 2 I. Tabulate the Induction motor parameters values (resistance, inductance, total inertia, friction torques coefficient) Figure 1 : Motor Parameters Stator Resistance (ohm) Rotor Resistance (Ohm) Stator Inductance (H) Rotor Inductance (H) Mutual Inductance (H) Total Inertia (kg.m^2) Friction Torque Coefficient 0.029 0.022 0.226/377 0.226/377 13.04/377 63.87 0 3 CASE 1 : The System Runs Normally Case 1 model 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Comment on the motor speed and torque variation. Currents 4 Generator mechanical power (second curve) Genrator output Power 5 Motor Speed - The Motor speed increased at starting then reached steady state value after about 3 seconds. Motor terminal voltage 6 Motor Torque - The motor torque fluctuated at starting due to the fault but then reached steady state value after nearly 1 or 2 seconds. 3. Tabulate the steady state values of the above measurements. We can get the steady state values from the graphs or from display blocks. Motor Torque Speed (RPM) (N.m) Generator output Generator power (p.u) mechanical power (p.u) 7965 1789 0.8155 7 0.8159 CASE 2 : The resistive load power is reduced by 50% Case 2 model - To reduce the resistive load by 50%, We used two circuit breakers and two resistive loads ( 1MW , 0.5 MW ), so that at the beginning The 1 MW load is connected and after 15 seconds, this load is disconnected using the cricuit breaker and the 0.5 MW load is connected . 8 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Comment on the motor speed and torque variation. Currents and Motor Speed at the beginning Generator mech Power 9 - After 15 seconds , The generator input mech power decreased , beacause when the resistive load decreased, the current drawn by the load decreased, so the output electrical power decreased. Generator Output power Motor Currents and Speed - The motor Speed increased just after switching but then returned to the original speed at steady state. 10 Terminal voltage Motor Torque - The Torque value remained constant after switching but it is lower than the torque value in Case 1. 11 3. Tabulate the steady state values of the above measurements. Motor Torque Motor Speed Generator output Generator (N.m) (RPM) power (p.u) mechanical power (p.u) 7958 1789 0.6548 12 0.6556 CASE 3 : The Resistive load Power is Increased By 50 % Case 3 model - The same model as Case 2 , but we used a 1.5 MW load instead of the 0.5 MW load. 13 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Comment on the motor speed and torque variation. Currents and Speed 14 - The motor Speed decreased just after switching but then returned to the original speed at steady state. - After 15 seconds , The generator input mech power increased , beacause when the resistive load increased, the current drawn by the load increased, so the output electrical power increased. Generator mech power Generator output power 15 Motor Terminal voltage - Terminal Voltage remained constant. Torque - The Torque value remained constant after switching but it is higher than the torque value in Case 1. 16 3. Tabulate the steady state values of the above measurements. Motor Torque Motor Speed Generator output Generator (N.m) (RPM) power (p.u) mechanical power (p.u) 7970 1789 0.9698 17 0.9745 CASE 4 : The generator reference speed is varied by ±3% Part 1 : The generator reference speed is increased by 3% We used step block instead of constant block to increase the generator reference speed after 15 seconds. 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Comment on the motor speed and torque variation. Currents 18 Currents and motor speed The motor speed increased when the generator reference speed increased, because the diesel engine governor controls the speed of the generator by controlling the input fuel (mechanical power) to the prime mover of the generator and it does that by measuring the generator synchronus speed and comparing it with the reference speed and increases input mechanical power until both speeds are equal. So When the generator speed increased at constant load, the generator output current increased , so the motor stator currrents increased so the speed of rotating field cutting the rotor increased causing the motor speed to increase at constant load torque. 19 Generator mechanical power Generator output power 20 Terminal Voltage - Motor Terminal Voltage remained constant. Torque - Torque value remained constant . 21 3. Tabulate the steady state values of the above measurements. Motor Torque Motor Speed Generator output Generator (N.m) (RPM) power (p.u) mechanical power (p.u) 7967 1842 0.8273 22 0.8306 Part 2 : The generator reference speed is decreased by 3% We used step block instead of constant block to decrease the generator reference speed after 15 seconds. 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Comment on the motor speed and torque variation. Currents 23 Currents and motor speed The motor speed decreased when the generator reference speed decreased, because the diesel engine governor controls the speed of the generator by controlling the input fuel (mechanical power) to the prime mover of the generator and it does that by measuring the generator synchronus speed and comparing it with the reference speed and decreases input mechanical power until both speeds are equal. So When the generator speed decreased at constant load, the generator output current decreased , so the motor stator currrents decreased so the speed of rotating field cutting the rotor decreased causing the motor speed to decrease at constant load torque. 24 Generator mechanical power Generator output power 25 Terminal Voltage - Motor Terminal Voltage remained constant. Torque - Torque value remained constant . 26 3. Tabulate the steady state values of the above measurements. Motor Torque Motor Speed Generator output Generator (N.m) (RPM) power (p.u) mechanical power (p.u) 7967 1736 0.8273 27 0.7978 CASE 5 : The generator reference Voltage is varied by ±5% Part 1 : The generator reference voltage is increased by 5% We used step block instead of constant block to increase the generator reference voltage after 15 seconds. 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Comment on the motor speed and torque variation. Currents 28 Motor Speed The excitation block controls the field voltage of the synchronus generator by measuring the output terminal voltage of the generator and comparing it with the reference voltage, so when the reference voltage is increased after 15 seconds, the field voltage of the generator increases until the output terminal voltage equals the desired reference voltage . When the generator terminal voltage increases , the generator output power increases, the motor currents increase , and its speed increases. 29 Motor terminal voltage The motor terminal voltage increased after 15 seconds. Generator mech power The generator mech power increased slightly after 15 seconds. 30 Generator output power Torque Motor Torque remained constant. 31 3. Tabulate the steady state values of the above measurements. Motor Torque Motor Speed Generator output Generator (N.m) (RPM) power (p.u) mechanical power (p.u) 7956 1790 0.8484 32 0.8491 Part 2 : The generator reference voltage is decreased by 5% We used step block instead of constant block to decrease the generator reference voltage after 15 seconds. 1. Plot against time: the induction motor torque, speed, currents, terminal voltage, generator mechanical power, generator output electrical power. 2. Comment on the motor speed and torque variation. Currents 33 Motor Speed The excitation block controls the field voltage of the synchronus generator by measuring the output terminal voltage of the generator and comparing it with the reference voltage, so when the reference voltage is decreased after 15 seconds, the field voltage of the generator decreases until the output terminal voltage equals the desired reference voltage . When the generator terminal voltage decreases , the generator output power decreases, the motor currents increase , and its speed increases. 34 Motor terminal voltage The motor terminal voltage decreased after 15 seconds. Generator mech power The generator mech power decreased slightly after 15 seconds. 35 Generator output power Torque Motor Torque remained constant. 36 3. Tabulate the steady state values of the above measurements. Motor Torque Motor Speed Generator output Generator (N.m) (RPM) power (p.u) mechanical power (p.u) 7954 1788 0.7839 0.7843 Drive Link for simulation files: https://drive.google.com/drive/u/0/folders/1_J5ejPC_EmJfeaQ-ijYFAuF8OeE3lAHh 37