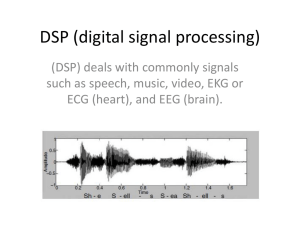
Discrete Time Signals And Systems What is signal? • In signal processing, a signal is a function that conveys information about a phenomenon. • In electronics and telecommunications, it refers to any time varying voltage, current, or electromagnetic wave that carries information. • Generally, signal is a time varying physical phenomenon which is intended to convey information. OR Signal is a function of time. OR Signal is a function of one or more independent variables, which contain some information. Types of Signal • Signals are classified into the following categories: Deterministic and Non-deterministic Signals Continuous Time and Discrete Time Signals Even and Odd Signals Periodic and Aperiodic Signals Energy and Power Signals Deterministic and Non-deterministic Signals • A signal is said to be deterministic if there is no uncertainty with respect to its value at any instant of time. Or, signals which can be defined exactly by a mathematical formula are known as deterministic signals. • A signal is said to be non-deterministic if there is uncertainty with respect to its value at some instant of time. • Non-deterministic signals are random in nature hence they are called random signals. Random signals cannot be described by a mathematical equation. They are modelled in probabilistic terms. Continuous Time Signals • Continuous-time signal is the “function of continuous-time variable that has uncountable or infinite set of numbers in its sequence”. • The continuous-time signal can be represented and defined at any instant of the time in its sequence. • The examples for continuous-time signals are sine waves, cosine waves, triangular waves, and so on. • The electrical signals also behave as continuous-time signals when these are derived in proportion with the physical parameters such as pressure, temperature, sound, and so on. Discrete Time Signals • Discrete-time signal is the “function of discrete-time variable that has countable or finite set of numbers in its sequence”. • It is a digital representation of continuous-time signal. • The discrete-time signal can be represented and defined at certain instants of time in its sequence i.e. the discrete-time signal is able to define only at the sampling instants. • The output data from a computer is one of the examples of discretetime signals. What is Digital Signal? • • • • Digital signal can be obtained from the discrete-time signal by quantizing and encoding the sample values. The discrete-time signals are represented with binary bits and stored on the digital medium. For example, if a signal is in range 0-5 volts; a discrete time signal (not quantized) can take values like 0.2, 0.02, 0.0005, 2, 4 etc. (just anything in the range 0-5 volts). But if it is uniformly quantized with say N quantization levels, then range 0-5 will be divided into N equal parts, each part will be assigned one value (which is in the range of that specific part), hence giving a set of N amplitude values. The digital signal can take any value out of these N values only ( and not just any value). Representation of discrete signal • Discrete-time signals are often depicted graphically as follows: • The value x[n] is undefined for non-integer values of n. • Sequences can be manipulated in several ways. The sum and product of two sequences x[n] and y[n] are defined as the sample-by-sample sum and product respectively. • Multiplication of x[n] by a is defined as the multiplication of each sample value by a. • A sequence y[n] is a delayed or shifted version of x[n] if y[n]=x[n-n0] with n0 an integer. Standard Discrete signals • The unit sample sequence is defined as • This sequence is often referred to as a discrete-time impulse, or just impulse. • It plays the same role for discrete-time signals as the Dirac delta function does for continuous-time signals Unit Step Sequence Exponential sequences Sinusoidal Sequence Even and odd signals • A discrete signal is said to be even or symmetric if x[-n] = x[n] • A discrete signal is said to be odd or asymmetric if x[-n] = −x[n] Periodic and Aperiodic Signals • A discrete time signal is periodic if and only if, it satisfies the following condition x(n+N)=x(n) where Ω0 is the frequency Energy and Power Signals What is system? • System is a device or combination of devices, which can operate on signals and produces corresponding response • A system is any process that produces an output signal in response to an input signal. • Continuous systems input and output continuous signals, such as in analog electronics. • Discrete systems input and output discrete signals, such as computer programs that manipulate the values stored in arrays. Discrete Time Systems Memory less systems • A system is memory-less if the output y[n] depends only on x[n] at the same n. • For example, y[n]=(x[n])2 is memory less but the ideal delay y[n]=x[n-nd] is not unless nd = 0. Linear systems Time-Invariant systems Example of continuous time system Causal and Non Causal system Causal Signal h[k] is the response of a linear system to the impulse input δ[k] Stability Linear Time-Invariant (LTI) systems • If the linearity property is combined with the representation of a general sequence as a linear combination of delayed impulses, then it follows that a linear time-invariant (LTI) system can be completely characterised by its impulse response. • Suppose hk[n]. is the response of a linear system to the impulse δ[n-k] at n = k. Since (from slide 12 & 28) • The principle of superposition means that • If the system is additionally time invariant, then the response to δ[n-k] is h[n-k].The previous equation then becomes • This expression is called the convolution sum. Therefore, a LTI system has the property that given h[n], we can find y[n] for any input x[n] • Alternatively, y[n] is the convolution of x[n] with h[n] denoted as follows: y[n]=x[n]*h[n] Stability of LTI systems Representation of signal on orthogonal basis Difference Equation A linear constant-coefficient difference equation serves as a way to express represent the input/output relationship to a given LTI discrete-time system. From this equation, note that y[n−k] represents the outputs and x[n−k] represents the inputs. The value of N represents the order of the difference equation (or order of the system) and corresponds to the memory of the system being represented. Because this equation relies on past values of the output, in order to compute a numerical solution, certain past outputs, referred to as the initial conditions, must be known. Solution of LCCDE Digital Signal Processing (4th Edition) by John G. Proakis, Dimitris K Manolakis, Pg: 98 onwards, solved problems What is Digital signal processing? • Digital signal processing (DSP) is the process of analyzing and modifying a signal to optimize or improve its efficiency or performance. • It involves applying various mathematical and computational algorithms to analog and digital signals to produce a signal that's of higher quality than the original signal. • DSP is primarily used to detect errors, and to filter and compress analog signals in transit. • It is a type of signal processing performed through a digital signal processor or a similarly capable device that can execute DSP specific processing algorithms. • Typically, DSP first converts an analog signal into a digital signal and then applies signal processing techniques and algorithms. • For example, when performed on audio signals, DSP helps reduce noise and distortion. Some of the applications of DSP include audio signal processing, digital image processing, speech recognition, biomedicine and more. Block Diagram of DSP • • • • • • • • • • The first step is to get an electrical signal. The transducer (in this case, a microphone) converts sound into an electrical signal. You can use any transducer depending upon the case. Once you have an analog electrical signal, we pass it through an operational amplifier (OpAmp) to condition the analog signal. Basically, we amplify the signal. Or limit it to protect the next stages. The anti-aliasing filter is an essential step in the conversion of analog to a digital signal. It is a low-pass filter. Meaning, it allows frequencies up to a certain threshold to pass. It attenuates all frequencies above this threshold. These unwanted frequencies make it difficult to sample an analog signal. The next stage is a simple analog-to-digital converter (ADC). This unit takes in analog signals and outputs a stream of binary digits. The heart of the system is the digital signal processor. These days we use CMOS chips (even ULSI) to make digital signal processors. In fact, modern processors, have high-speed, high data throughputs, and dedicated instruction sets. The next stages are sort of the opposite of the stages preceding the digital signal processor. The digital-to-analog converter does what its name implies. It’s necessary for the slew rate of the DAC to match the acquisition rate of the ADC. The smoothing filter is another low-pass filter that smoothes the output by removing unwanted high-frequency components. The last op-amp is just an amplifier. The output transducer is a speaker in our case. You can use anything else according to your requirements. Sampling • Most discrete-time signals come from sampling a continuoustime signal, such as speech and audio signals, radar and sonar data, and seismic and biological signals. • The process of converting these signals into digital form is called analog-to-digital (A/D) conversion. • The reverse process of reconstructing an analog signal from its samples is known as digital-to-analog (D/A) conversion. Analog-to-Digital Conversion • An A/D converter transforms an analog signal into a digital sequence. • The input to the A/D converter, xa(t), is a real-valued function of a continuous variable, t . • Thus, for each value of t, the function xa(t) may be any real number. • The output of the A/D is a bit stream that corresponds to a discretetime sequence, x(n), with an amplitude that is quantized, for each value of n, to one of a finite number of possible values. Sampler (C/D converter) Quantizer & Encoder • Because the samples xa(nTs) have a continuous range of possible amplitudes, the second component of the A/D converter is the quantizer, which maps the continuous amplitude into a discrete set of amplitudes (where T=Ts). • For a uniform quantizer, the quantization process is defined by the number of bits and the quantization interval Δ. • The last component is the encoder, which takes the digital signal x(̂ n) and produces a sequence of binary codewords. Periodic Sampling • First, the continuous-time signal is multiplied by a periodic sequence of impulses, to form the sampled signal • Then, the sampled signal is converted into a discrete-time signal by mapping the impulses that are spaced in time by Ts into a sequence x(n) where the sample values are indexed by the integer variable n: • Thus, X(ejω) is a frequency-scaled version of Xs(jΩ) , with the scaling defined by ω= ΩTs • This scaling, which makes X(ejω) periodic with a period of 2π , is a consequence of the time-scaling that occurs when xs(t ) is converted to x(n). Problems