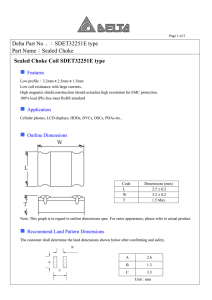
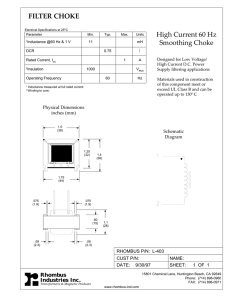
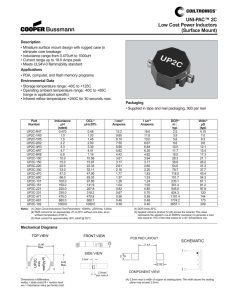
energies Article Partial Stray Inductance Modeling and Measuring of Asymmetrical Parallel Branches on the Bus-Bar of Electric Vehicles Chengfei Geng ID , Fengyou He *, Jingwei Zhang and Hongsheng Hu School of Electrical and Power Engineering, China University of Mining and Technology, Xuzhou 221116, China; ge-cumt-001@163.com (C.G.); hangjingwei@cumt.edu.cn (J.Z.); hhssgd@126.com (H.H.) * Correspondence: hfy_cumt@263.net; Tel.: +86-516-8013-9898 Academic Editors: Joeri Van Mierlo and Omar Hegazy Received: 16 August 2017; Accepted: 26 September 2017; Published: 1 October 2017 Abstract: In order to increase the power rating of electric vehicles, insulated gate bipolar translator (IGBT) modules with multiple power terminals are usually adopted. The transient current sharing of the same polarity power terminals is related to the stray inductance in the branches of the bus-bar. Based on the laminated bus-bar of a three-phase inverter in the electric vehicles that consists of asymmetrical parallel branches, this paper investigates the transient current imbalance sharing caused by the asymmetrical stray inductance in the parallel branches of the bus-bar from the view of energy storing and releasing of stray inductance for the first time. Besides, the partial self-inductance and mutual-inductance model of the parallel branches is set up. Finally, a high-precision partial stray inductance measurement method is proposed, and the accuracy of the partial stray inductance model for asymmetrical parallel branches is verified by experimental tests. Keywords: laminated bus-bar; electric vehicles; partial self-inductance; partial mutual inductance; asymmetrical branches 1. Introduction In recent years, electrical vehicles (EVs) have gained unprecedented evolution in consideration of the current energy crisis and environmental protection [1]. For an EV inverter, high efficiency, high power density, low harmonics, small volume, and low cost are essential [2–4]. Due to the low stray inductance, the laminated bus-bar has now been widely used in power electronics and converter products [5–7]. With power devices continuing to move upwards in current levels and switching frequency, laminated bus-bars have been attracting increasing interest from both industry and academia for the system benefits they exhibit [8]. The over-voltage spikes across the semiconductor during switching directly results from the commutation loop stray inductance. The high di/dt values produced during commutations by these new fast switching devices and diodes are currently the main source of conducted and radiated noise emissions, which usually interferes with nearby equipment through conduction or radiation [9,10]. For an EV inverter, the position of the small signal control circuit is often very close to high voltage, large current components such as the bus-bar or the power devices considering the limited space in an enclosure. The strength of Electro Magnetic Interference (EMI) emission is associated with transient current distribution on the bus-bar. So, for reliable operation of the control circuit in an EV inverter, the analysis, extraction, and evaluation of the stray inductance for a laminated bus-bar are very important. Due to the increasing power of EV inverters, IGBT modules with multiple power terminals are often adopted. Moreover, the transient current sharing performance between power terminals of the same polarity is related to the stray inductance of the branches. In prior research, the most Energies 2017, 10, 1519; doi:10.3390/en10101519 www.mdpi.com/journal/energies Energies 2017, 10, 1519 2 of 16 focus has been on optimizing the bus-bar structure based on the circuit topology [6,7,11]. Partial inductance theory is applied to build the model of bus-bar stray inductance [12–14]. The Partial Element Equivalent Circuit (PEEC) method [15,16] is adopted to construct the model and investigate the transient current distribution in the laminated bus-bar. Furthermore, with consideration of the current path, a partial self-inductance and mutual-inductance model of a H-bridge bus-bar has been built [17]. All the modeling and analysis are based on a single power electronics topology. But, the transient imbalance current sharing caused by the asymmetrical stray inductance in bus-bar parallel branches is comparatively scarce. This paper deeply investigates the transient imbalance current sharing arising from the asymmetrical stray inductance in bus-bars from the view of stray energy storing and releasing for the first time. The partial self-inductance and mutual-inductance model of the asymmetrical parallel branches is also set up to facilitate transient current analysis. In order to evaluate the stray inductance of the bus-bar and verify the modeling accuracy, many measuring methods have been proposed by scholars and engineers. These include gap voltage measurement based on the IGBT turn-on process [18], time domain reflectometry (TDR) method [19], resonant capacitance measurement methods [6], stray inductance integral arithmetic extraction method for bus-bar based on turn-on/off transient process [20], network analyzer measurement [17], etc. However, all these methods mentioned above focus on the total stray inductance of the current communication loops rather than the partial inductance. This paper proposes a high precision method to measure the partial inductance in the bus-bar, and the measuring accuracy is also analyzed considering the spatial transient electromagnetic field. Experimental evaluation of partial stray inductance extraction including direct and indirect measurement verifies the proposed model and measuring method. 2. Inverter Layout and Equivalent Circuit of the Bus-Bar 2.1. Inverter Layout Consideration The main drivers for the development of EVs can be summarized to be cost, power density, specific volume, efficiency, and reliability. In this design, the power rating of the EV inverter is 200 kW. The inverter is assembled using individual building blocks serving the system, including switch (power device IGBT), energy storage (DC link capacitor), current distributor (copper bus-bar structure), and cooling system (liquid cooled heat sink). In addition, sensor functions (Hall elements) and control circuits are integrated. This setup is connected using screws and is supported by mechanical parts and protected by an enclosure, which is shown in Figure 1a. The inner structure of the inverter is shown in Figure 1b, in which the 1.2-KV/1400-A half bridge IGBT module is used. A low-inductance, high-frequency film capacitor is used to replace the conventional electrolytic bulk capacitors to reduce size and enhance the reliability. High-speed switching devices produce lots of EMI noise during the fast on-off process, which usually interferes with nearby equipment through conduction or radiation [8–10]. Typical problems caused are measurement errors in sensors, false control signals, and interference in the gate voltages of switching devices [8]. Excessive noise can deteriorate control, reduce efficiency, and cause malfunctions of system. In this design, the control circuit is on the topside of the bus-bar. High impedance circuits are sensitive to EMI, such as the signal conditioning circuit of analog to digital (AD) acquisition. The source of EMI is associated with the transient current changes in the bus-bar. Simulation plays an important role in understanding the operating principle of the whole system and the functioning of some key components because it is more instructive and can save time and cost. Previous simulation platforms only concern analysis of the control algorithm. Parasitic elements are usually omitted to save simulation time [21]. So, in order to predict and evaluate the EMI/Electro Magnetic Compatibility (EMC) performance accurately and to further guide the layout of some key components in a limited space for EV inverters, a precise simulation platform that includes the main parasitic components should be built up. Energies 2017, 10, 1519 Energies 2017, 10, 1519 Energies 2017, 10, 1519 3 of 17 3 of 16 3 of 17 DC capacitor DC capacitor Current sensor Current DSP Control sensor Board DCC DSP Control Board DCB C A B DC+ A DC+ Water cooled output Water cooled output enclosure Water cooled input enclosure Water cooled input (a) (a) DC capacitor DC capacitor Lamiated bus bar Lamiated bus bar DC- N DC- N Gate Driver Gate Driver C P C P B b B b A A DC+ DC+ IGBT IGBTmodules modules (b) (b) Figure The structure thethe EV motor motor driverdriver system (MDS). (a) structure; (b)(b) Internal Figure 1. structure ofofthe EV system (MDS).(MDS). (a)External External structure; Internal Figure 1. 1.The The structure of EV motor system (a) External structure; (b) structure. structure. Internal structure. EquivalentCircuit CircuitofofBus-bar Bus-barConsidering Considering Stray Stray Inductance 2.2.2.2. Equivalent Inductance 2.2. Equivalent Circuit of Bus-bar Considering Stray Inductance Thestructure structureand andcircuit circuitprinciple principle of of the half bridge IGBT module adopted in this design is is The bridge IGBT module adopted this design The structure and circuit principle ofterminals the the halfhalf bridge IGBT module adopted in represent thisin design is shown shown in Figure 2. There are 5 power on the IGBT, terminals 9 and 11 collector shown in 2. Figure 2.are There are 5 terminals power terminals on theterminals IGBT, terminals 9 and 11 represent collector in Figure There 5 power on the IGBT, 9 and 11 represent collector of the of the upper IGBT, terminals 10 and 12 represent emitter of the lower IGBT and terminal 8 represents of the upper IGBT, terminals 1012and 12 represent emitter oflower the lower IGBT and terminal 8 represents upper IGBT, terminals 10 and represent emitter of the IGBT and terminal 8 represents the the middle terminal. the middle terminal. middle terminal. 9/11 5 12 12 11 11 10 10 9 9 8 5 8 5 4 3 6 4 3 67 7 1 2 1 2 4 6 9/11 5 4 3 6 8 3 NTC 8 NTC 7 7 1 2 1 2 10/12 10/12 Figure 2. The structure and circuit principle of the IGBT module. Figure Figure 2. 2. The The structure structure and and circuit circuit principle principle of of the the IGBT IGBT module. module. Energies 2017, 10, 1519 Energies 2017, 10, 1519 4 of 16 4 of 17 detailed structure structureof ofthe thelaminated laminatedbus-bar bus-barisisshown shownininFigure Figure The power terminal P and The detailed 3. 3. The power terminal P and N N are connected to anode the anode and cathode bus capacitor. A,CB,are and are the output are connected to the and cathode of theof DCthe busDC capacitor. A, B, and theCoutput terminals terminals of the inverter. The power terminals 9 and 11 onbus theare positive bus to arethe connected of the inverter. The power terminals 9 and 11 on the positive connected Collector to of the Collector of the IGBT. The power terminals and 12 on the negative bus to arethe connected to the upper IGBT. Theupper power terminals 10 and 12 on the10negative bus are connected Emitter of Emitter of the lower IGBT. lower IGBT. This paper focuses on the stray inductance of parallel branches of the bus-bar, without the stray inductance inductance in in the the capacitor capacitor and and IGBT IGBT module. module. The simplified stray consideration of the stray inductance model of the three phase inverter is shown shown in in Figure Figure 4a. 4a. The detailed detailed stray stray inductance inductance model with the consideration of the asymmetrical parallel branch of every phase on the bus-bar is Figure 4b. 4b. Lσ1 shown in Figure and LLσ2σ2represent representstray stray inductance inductance from from positive positive DC DC bus bus terminal terminal P to σ1 and and 11 11 respectively. respectively. LLσ3 σ3 and Lσ4 terminals 9 and represent the the stray stray inductance inductance from negative DC bus σ4 represent respectively. and 10 10 respectively. terminal N to terminals 12 and P N 12 11 10 9 Structure of the bus-bar. Figure 3. Structure bus-bar. Lσ1 LσB1 LσA1 Lσ2 LσC1 9 P SA1 SB1 11 SC1 c SA1 Udc Udc SA2 SB2 SC2 SA2 N LσA2 8 LσB2 LσC2 (a) Lσ3 12 Lσ4 10 e (b) Figure 4. Equivalent circuit of every phase leg. (a) Simplified circuit; (b) Detailed circuit. Figure 4. Equivalent circuit of every phase leg. (a) Simplified circuit; (b) Detailed circuit. 3. Transient Analysis and Modeling of Asymmetrical Branches 3. Transient Analysis and Modeling of Asymmetrical Branches 3.1. Transient Analysis 3.1. Transient Analysis There are are eight eight switch switchstates statesfor foraathree-phase three-phaseinverter inverterand andonly only one power device is permitted There one power device is permitted to to change state at any time under normal operation conditions. The double pulse test is used to test change state at any time under normal operation conditions. The double pulse test is used to test the the IGBT over-voltage and stray inductance the bus-bar, meanwhile, every shares phase shares thetesting same IGBT over-voltage and stray inductance of theofbus-bar, meanwhile, every phase the same testing principle, and this paper defines phase B as the example. Figure 5 is the basic principle of the principle, and this paper defines phase B as the example. Figure 5 is the basic principle of the test test circuit. The i 1, i2, i3, and i4 represent the current in the branches of Lσ1, Lσ2, Lσ3, and Lσ4. Furthermore, circuit. The i1 , i2 , i3 , and i4 represent the current in the branches of Lσ1 , Lσ2 , Lσ3 , and Lσ4 . Furthermore, taking Proximity ProximityEffect Effect into consideration, coupled inductance exists among fourbranches. current taking into consideration, coupled inductance exists among the fourthe current branches. Energies 2017, 10, 1519 Energies 2017, 10, 1519 5 of 17 5 of 16 Energies 2017, 10, 1519 5 of 17 i1 Lσ1 i1 Lσ1 i2 i2 P P Mσ1_2 Mσ1_2 Lσ2 Lσ2 S1 Mσ1_3 Mσ1_3 Udc Udc S1 Mσ2_3 Mσ2_3 Mσ1_4 Mσ1_4 Mσ2_4 Mσ2_4 Lσ3 Lσ3 N N Mσ3_4 Mσ3_4 Lσ4 Lσ4 S2 S2 i3 i3 Load Load iload iload i4 i4 Figure 5. The test circuit of every phase leg. Figure ofevery everyphase phaseleg. leg. Figure5.5.The The test test circuit circuit of The transient analysis is based on the two branches of Lσ1 and Lσ2, and the waveforms of the The transient analysis basedon on thetwo two branches branches of σ1 and Lσ2,σ2and thethe waveforms of the The analysis is isbased of LLof , and waveforms of the σ1t0and doubletransient pulses test is depicted in Figurethe 6. The time intervals –t1, tL3–t 4, and t7–t8 represent steadydouble pulses test is depicted in Figure 6. The time intervals of t 0–t1, t3–t4, and t7–t8 represent steadydouble pulses test is depicted in Figure 6. The time intervals of t –t , t –t , and t –t represent 0 1 3 4 7 8 state of conducting and blocking. This paper focuses on the transient process of turn-on and turn-off state of conducting and blocking. This paper focuses on the transient process of turn-on and turn-off and steady-state of conducting andinterval blocking. focuses transient of turn-on which refers to the time of This t1–t3 paper and t4–t 7, and on thethe current in process t8–t9 shares the same which refers to the time interval of t1–t3 and t4–t7, and the current in t8–t9 shares the same turn-off which refers the time interval of tinterval. characteristics withto current in the t1–t3 time 1 –t3 and t4 –t7 , and the current in t8 –t9 shares the same characteristics with current in the t1–t3 time interval. characteristics with current in the t1 –t3 time interval. VVgg t t ½· itotal ½· itotal ii11 t t i2i2 tt00 t1t1t2tt23t3 t4t45t65t67 t7 t8 t8t9 t9 Figure 6. The waveforms of the double pulse test. Figure pulse test. Figure6.6.The Thewaveforms waveformsofofthe thedouble double pulse test. 3.1.1. Turn-Off Transient 3.1.1. Turn-Off Transient 3.1.1. Transient At tAt , S1 receives the turn-off signal and and thebus-bar bus-bar can be equivalent the circuit depicted 1 S1 receives to to theto circuit depicted in in At tt11,, S1 receives the the turn-off turn-offsignal signal andthe the bus-barcan canbebeequivalent equivalent the circuit depicted in Figure 7,7,ininwhich itotal represents the turn-off current. According to Kirchhoff’s Current Law, the Figure which i total represents the turn-off current. According to Kirchhoff’s Current Law, the Figure 7, in which itotal represents the turn-off current. According to Kirchhoff’s Current Law, the branch current satisfies i1 +i1i+2 i=2 =i3i3++i4i4 == iitotal , meanwhile, the voltage in stray inductance of each branch branch current satisfies inin stray inductance of of each branch branch current satisfies i1 + i2 = i3 + i4 = total itotal, ,meanwhile, meanwhile,the thevoltage voltage stray inductance each branch satisfies u = u and u = u . satisfies u L1 = u L2 and u L3 = u L4 . L1uL1 =L2 L3L3 = uL4 satisfies uL2 and u L4. The turn-off process of an IGBT can be regarded as the stray inductance energy releasing process, so the following analysis is based on magnetic field energy stored in the stray inductance. At t1 , the energy stored in branches Lσ1 and Lσ2 are given as ( WLσ1 (t1 ) = 12 Lσ1 i12 (t1 ) WLσ2 (t1 ) = 21 Lσ2 i22 (t1 ) (1) WLσ1 (t1 ) and WLσ2 (t1 ) are determined by the current and inductance in the two branches at t1 , meanwhile, S1 starts to turn off and itotal starts to decrease. Hence, the energy stored in Lσ1 and Energies 2017, 10, 1519 6 of 16 Lσ2 begins to release, moreover, the speed of releasing is determined by the stray inductance in the two branches and the speed of turn-off. If the energy stored in Lσ1 and Lσ2 is released completely at t3 simultaneously, that means WLσ1 (t3 ) = 0 and WLσ2 (t3 ) = 0, and the current direction in the two branches depicted in Figure 7 does not change from t1 to t3 . If the energy stored in Lσ1 and Lσ2 does not release completely at t3 simultaneously, that means WLσ1 (t2 ) 6= 0 or WLσ2 (t2 ) 6= 0 and one of the two branches must be released completely prior to the other. This study supposes the energy stored in Lσ2 releases completely at t2 , namely i2 (t2 ) = 0. From t1 to t2 , the current i1 and i2 decrease gradually shown in Figure 8 (t1 –t2 ) but the current direction does not change. At t2 , i1 (t2 ) = itotal (t2 ) and Lσ1 can be equivalent to a power source, and the direction of potential is shown in Figure 7, so the branch of Lσ2 provides the path of energy release for Lσ1 that means the current i2 changes direction from t2 and increases at the same slope as i1 shown in Figure 8 (t2 –t3 ), but they share the contrary direction. At t3 , the current i1 and i2 are equal in magnitude and opposite in direction and itotal = 0, moreover, neglecting the influence of tail current, the IGBT is closed completely. Due to the asymmetrical stray inductance in branches Lσ1 and Lσ2 , a loop current is caused after turning off the IGBT. At the turn-off transient, due to uL1 = uL2 , the variation ratio of i1 and i2 can be calculated by di1 L = σ2 di2 Lσ1 Energies 2017, 10, 1519 6 of 17 (2) uL1 Lσ1 i1 Mσ1_2 Lσ2 uL2 i2 Mσ1_3 Mσ2_3 Mσ1_4 Mσ2_4 i3 uL3 uL2 Energies 2017, 10, 1519 itotal Mσ3_4 Lσ4 Lσ3 i4 Figure 7. The equivalent circuit of the turn-off transient. Figure 7. The equivalent circuit of the turn-off transient. 7 of 17 i1 IGBT can be regarded The turn-off process of an i1 as the stray inductance energy releasing process, so the following analysis is based on magnetic field energy stored in the stray inductance. itotal itotal At t1, the energy stored in branches Lσ1 and Lσ2 are given as i2 (t1-t2) i1 1 i22 WL 1 (t1 ) 2 L 1i1 (t1 ) (t2) 1 WL (t1 ) L 2i22 (t1 ) 2 2 i1 (1) WLσ1(t1) and WLσ2(t1) are determined iby the current and inductance total itotal in the two branches at t1, meanwhile, S1 starts to turn off and itotal starts to decrease. Hence, the energy stored in Lσ1 and Lσ2 i2 begins to release, moreover, the ispeed of releasing is determined by the stray inductance in the two 2 branches and the speed of turn-off. If the energy stored in Lσ1 and Lσ2 is released completely at t3 (t3the ) current direction in the two branches simultaneously, that means W(t Lσ12 (t-t 3)3=) 0 and WLσ2(t3) = 0, and depicted in Figure 7 does not change from t1 to t3. If the energy stored in Lσ1 and Lσ2 does not release 8. The current direction branches at the turn-off transient. completely at t3 Figure simultaneously, that meansof Wparallel Lσ1(t2) ≠ 0 or WLσ2(t2) ≠ 0 and one of the two branches Figure 8. The current direction of parallel branches at the turn-off transient. must be released completely prior to the other. This study supposes the energy stored in Lσ2 releases completely at t2Transient , namely i2(t2) = 0. From t1 to t2, the current i1 and i2 decrease gradually shown in Figure 3.1.2. Turn-On 8 (t1–t2) but the current direction does not change. At t2, i1(t2) = itotal(t2) and Lσ1 can be equivalent to a At t4, S1 receives the open signal, due to the reverse recovery characteristic of the freewheeling power source, and the direction of potential is shown in Figure 7, so the branch of Lσ2 provides the diode inside S2, and S2 is equivalent to a short-circuit. The equivalent circuit is depicted in Figure 9. path of energy release for Lσ1 that means the current i2 changes direction from t2 and increases at the i2 i2 (t2-t3) Energies 2017, 10, 1519 (t3) Figure 8. The current direction of parallel branches at the turn-off transient. 7 of 16 3.1.2. Turn-On Transient 3.1.2. Turn-On Transient , S1receives receivesthe theopen opensignal, signal, due due to to the the reverse the freewheeling AtAt t4 ,t4S1 reverse recovery recoverycharacteristic characteristicofof the freewheeling diode inside S2, and S2 is equivalent to a short-circuit. The equivalent circuit is depicted inin Figure 9. 9. diode inside S2, and S2 is equivalent to a short-circuit. The equivalent circuit is depicted Figure uL1 Lσ1 i1 Mσ1_2 uL2 i2 Lσ2 Mσ1_3 itotal Mσ2_3 Mσ1_4 Mσ2_4 uL3 i3 Lσ4 uL4 Lσ3 Mσ3_4 i4 Figure 9. The equivalent circuit of the turn-on transient. Figure 9. The equivalent circuit of the turn-on transient. i1 (ti14(t)4and associatedwith withthe thecommutation commutation between Lσ2 during t3 –t4 . ) andi2i(t 2(t are mainly mainly associated between Lσ1 Land Lσ2 during t3–t4. At σ1 and 44)) are and Lσ2Lis released completely, that means W Lσ1 (t 4 ) = 0 and W Lσ2 (t 4 ) = 0,(t4 ) Attt44, ,ififthe theenergy energystored storedininLσ1 Lσ1 and is released completely, that means W (t ) = 0 and W σ2 Lσ1 4 Lσ2 also i 1 (t 4 ) = 0 and i 2 (t 4 ) = 0. Starting from t 4 , i 1 and i 2 increase rapidly from zero to the peak of reverse = 0, also i1 (t4 ) = 0 and i2 (t4 ) = 0. Starting from t4 , i1 and i2 increase rapidly from zero to the peak current, the rising the slope is related strayto inductance the branch,inand magnitude of recovery reverse recovery current, rising slopetoisthe related the stray in inductance thethe branch, and the and direction of current is shown in Figure 9. If the energy stored in L σ1 and L σ2 does not release magnitude and direction of current is shown in Figure 9. If the energy stored in Lσ1 and Lσ2 does not completely duringduring t3–t4, that some loop current exists and i1(t4) = − i2(t4), as depicted in Figure release completely t3 –tmeans 4 , that means some loop current exists and i1 (t4 ) = − i2 (t4 ), as depicted 10 (t 4). Starting from t4, due to the external voltage, i1 increases rapidly and i2 decreases to zero quickly, in Figure 10 (t4 ). Starting from t4 , due to the external voltage, i1 increases rapidly and i2 decreases to as depicted in Figure 10 (t4–t5), until i1(t5) = itotal(t5), as depicted in Figure 10 (t5). Then, starting from t5, zero quickly, as depicted in Figure 10 (t4 –t5 ), until i1 (t5 ) = itotal (t5 ), as depicted in Figure 10 (t5 ). Then, i1 and i2 keep the same direction and rise to maximum value at the same time. During the period of starting from t5 , i1 and i2 keep the same direction and rise to maximum value at the same time. During t6–t7, the reverse recovery current is at the vanishing stage and is equivalent to the load current iload. the period of t6 –t7 , the reverse recovery current is at the vanishing stage and is equivalent to the load Similar to the turning-off process, i1 and i2 may change direction, but the differential of the two current iload . Similar to the turning-off process, i1 and i2 may change direction, but the differential of currents can10, also Energies 2017, 1519be described by Formula (2). 8 of 17 the two currents can also be described by Formula (2). i1 i1 itotal itotal i2 i2 (t4) (t4-t5) i1 i1 itotal i1 itotal itotal i2 i2 i2 (t5) (t5-t6) (t6-t7) Figure 10. The current direction of parallel branches at the turn-on transient. Figure 10. The current direction of parallel branches at the turn-on transient. 3.2. Model of Stray Inductance 3.2. Model of Stray Inductance Based on the above analysis, although the direction of current changes at the turn-on transient Based on the above analysis, although the direction of current changes at the turn-on transient or the turn-off transient, the position of the bus-bar does not change, and the dotted terminals of or the turn-off transient, the position of the bus-bar does not change, and the dotted terminals of the the branch equivalent inductance remains the same. Ultimately, the over-voltage caused by mutual branch equivalent inductance remains the same. Ultimately, the over-voltage caused by mutual inductance also stays the same. inductance also stays the same. The partial stray inductance model for Lσ1, Lσ2, Lσ3, and Lσ4 is as follows: u L1 Ls 1 u L 2 M 2 1 u M L3 3 1 u M M1 2 Ls 2 M32 M M1 3 M 23 Ls 3 M M1 4 i1 M 2 4 d i2 M 3 4 dt i3 i L (3) Energies 2017, 10, 1519 8 of 16 The partial stray inductance model for Lσ1 , Lσ2 , Lσ3 , and Lσ4 is as follows: u L1 u L2 u L3 u L4 Lsσ1 M21 M31 M41 = M12 Lsσ2 M32 M42 M13 M23 Lsσ3 M43 M14 M24 M34 Lsσ4 d · · dt i1 i2 i3 i4 (3) The uL1 , uL2 , uL3 , and uL4 represent induced voltage of stray inductance Lσ1 , Lσ2 , Lσ3 , and Lσ4 , respectively, at the switching transient. The Lsσ1 , Lsσ2 , Lsσ3 , and Lsσ4 represent self-inductance in branches Lσ1 , Lσ2 , Lσ3 , and Lσ4 . Meanwhile the M12 (M21 ), M13 (M31 ), M14 (M41 ), M23 (M32 ), M24 (M42 ), and M34 (M43 ) represent the mutual-inductance for each branch. While measuring the bus-bar stray inductance, only the transient voltage and current of the bus-bar are available, so the measured values are all of equivalent stray inductance, and the mathematical model is as follows. i1 u L1 Lσ1 0 0 0 u 0 Lσ2 0 0 L2 d i2 (4) · = · u L3 0 0 Lσ3 0 dt i3 i4 u L4 0 0 0 Lσ4 According to Equation (3) and (4), the bus-bar equivalent stray inductance is expressed as: h L = Lsσ1 σ1 h Lσ2 = M21 h L = M31 σ3 h L = M σ4 41 M12 M13 M14 Lsσ2 M23 M24 M32 Lsσ3 M34 M42 M43 Lsσ4 i h · 1 i h 1 · di di i h 2 1 · di di i h 3 1 · di di 4 di2 di1 di3 di1 di4 di1 1 di3 di2 di4 di2 di2 di3 1 di4 di3 di2 di4 di3 di4 1 iT iT iT (5) iT For Equation (5), the differential is difficult to obtain from measurement at the turn-off transient. Because of the excellent linearity at the turn-on transient, the differential can be replaced by difference. h 1 h di1 di h 2 di 1 di3 h di1 di2 di1 di3 di1 di4 di1 1 di3 di2 di4 di2 di2 di3 1 di4 di3 di2 di4 di3 di4 di4 1 iT iT iT iT ∆i2 ∆i1 ∆i3 ∆i1 ∆i4 ∆i1 ∆i1 ∆i2 1 ∆i3 ∆i2 ∆i4 ∆i2 h ∆i1 ∆i3 ∆i2 ∆i3 1 ∆i4 ∆i3 h ∆i1 ∆i4 ∆i2 ∆i4 ∆i3 ∆i4 = h = h = = 1 1 iT iT iT (6) iT Based on Figures 7 and 9, the simplified equivalent circuit is shown in Figure 11. The induced voltage in the switching transient of the stray inductance LσPc and LσNe meets: " u Pc u Ne # " = LsσPc MPN MPN LsσNe # d · dt " itotal itotal # (7) where, uPc = uL1 = uL2 , uNe = uL3 = uL4 . LsσPc and LsσNe represent the self inductance and mutual inductance of LσPc and (between) LσNe . The current matrices meet: " itotal itotal # " = 1 0 1 0 0 1 0 1 # · i1 i2 i3 i4 (8) Energies 2017, 10, 1519 Energies 2017, 10, 1519 9 of 16 9 of 17 Based on Equations (7) and inductance matrix T T meets as: (8), the simplified " LsσPc MPN where: di di di i i3 i4 1 2 3 4 1 2 di#1 di1 "di1 i1 #i1 i1 T T M 0 i1 0 i3 −1i4 di1 = di3 di41 1 PN 1 1 ·L · 0 0 1i 1 i i L sσNe 2 2 di2 di2 di2 2 T T i1 i2 i4 di1 di2 di4 1 1 di di di3 i3 i3 i3 3 3 TM T M M di1 di2 Ldisσ1 12 i1 13 i2 14 i3 3 M23 M24 1 M 1 Lsσ2 L4 =di4 di21 di 4 i4 i4 i4 1 1 0 0 0 0 1 1 −1 M31 M32 Lsσ3 M34 M41 M42equivalent M43 Lsσ4 Based on Figure 7 and Figure 9, the simplified circuit is shown in Figure 11. LσPc uPc LσPc MPN (6) (10) uPc itotal MPN itotal (9) Energies 2017, 10, 1519 10 of 17 LσNe uNe LσNe uNe Ls1 M 12 M 13 M 14 M Ls 2 M 23 M 24 21 L (a) (10) M 31 M 32 Ls 3 M 34 (b) Mswitching M 43 transient. Ltransient. Figure (a)(a) Turn 42 s 4 Min41inthe Figure11. 11.The Thesimplified simplifiedequivalent equivalentcircuit circuit the switching Turnoff offtransient; transient;(b) (b)turn turn onontransient. transient. 4. Measuring Method forinPartial Stray Inductance The induced voltage the switching transient of the stray inductance LσPc and LσNe meets: 4. Measuring Method for Partial Stray Inductance 4.1. Basic Principle uPc LsPc M PN d itotal 4.1. Basic Principle (7) u Ne M PN LsNe dt itotal The measuring principle for partial stray inductance is based on the inductance voltage integral The measuring principle for partial stray inductance is based on the inductance voltage integral method stray is determined by the inductance outside the where, uPc[20]. = uL1Under = uL2, uhigh Ne = ufrequency, L3 = uL4. LsσPcthe and LsσNeinductance represent the self inductance and mutual inductance method [20]. Under high frequency, the stray inductance is determined by the inductance outside the tending to be. The constant. The voltagemeet: and current waveform of the stray inductance at the ofconductor, LσPc and (between) LσNe current matrices conductor, tending to be constant. The voltage and current waveform of the stray inductance at the turn-off process of an IGBT is shown in Figure 12. turn-off process of an IGBT is shown in Figure 12. i1 ito ta l 1 1 0 0 i2 (8) ito ta l 0 0 1 1 i3 i4 i t Based on Equations (7) and (8), the simplified inductance matrix meets as: u t A LsPc M PN 1 M PN 1 1 0 0 1 1 B L Lt sNe 0 0 1 1 0 u t 0 t1 i 1 0 0 1 1 t 2 (9) where: Figure 12. The current, voltage waveform of inductance at the turn-off transient. Figure 12. The current, voltage waveform of inductance at the turn-off transient. Furthermore, the voltage on stray inductance depends on the changing rate of current, expressed by following equation: u t L di dt (11) Energies 2017, 10, 1519 10 of 16 Furthermore, the voltage on stray inductance depends on the changing rate of current, expressed by following equation: di u(t) = Lσ · (11) dt By the calculation of the definite integral for Equation (11), the bus-bar partial stray inductance is obtained and t1 –t2 represents the time of the turn-on transient or turn-off transient. R t2 Lσ = t1 u(t)dt (12) i ( t2 ) − i ( t1 ) 4.2. Measurement Error Analysis Based on Equation (12), the measured value of partial stray inductance is determined by the integral value of voltage during the period of t1 –t2 and the values of i(t2 ) and i(t1 ). So, the precise partial stray inductance can be obtained once the integral value of the voltage and the two transient current values are available. The measurement diagram of stray inductance is shown in Figure 13. Because the bus-bar partial stray inductance is very small, the voltage on the stray inductance at the switching transient is also very small, so a passive probe is needed to raise the bandwidth and precision of the voltage measurement. The probe of the oscilloscope is a high impedance circuit, vulnerable to the interference of an external magnetic field, and the interference source is mainly the voltage on the measuring lead-wire caused by Energies 2017, 10, 1519 11 of 17 the spatial transient magnetic field. Busbar Measuring wire i A cl2 Oscilloscope c13 Lσ Oscilloscope probe cl1 Figure 13. 13. The The measuring measuring method method of of partial partial stray stray inductance. inductance. Figure The is divided divided into into ccl1l1,, ccl2l2,, and The measuring measuring wire wire is and ccl3l3, ,shown shownin inFigure Figure 13. 13. According According to to the the theory theory of partial inductance, the induced voltage on the measuring lead-wire caused by the spatial transient of partial inductance, the induced voltage on the measuring lead-wire caused by the spatial transient magnetic by: magnetic field field can can be be expressed expressed by: d( R Verr =Verr R R dA ( ·Adl d+l AA d· ldl + A dlA) · dl) cl1 ccl2l 2 cl 1 dt dt cl 3 cl3 (13) (13) represents the magnetic vector potential caused by the bus-bar bus-bar current current and the the magnitude magnitude and and A represents direction is decided by the Biot–Savart law [14] AA= µ 4π 4 JJ vv RR ·dvdv Z (14) (14) J represents Based on on Formula (14),(14), A shares the same direction with representsthe thecurrent currentdensity densityvector. vector. Based Formula A shares the same direction the and isand inversely proportional to thetodistance fromfrom the bus-bar in magnitude. So, the withcurrent the current is inversely proportional the distance the bus-bar in magnitude. So, measuring precision can be raised, guaranteeing the lead-wire cl1 andccl1l2 are to the busthe measuring precision can be raised, guaranteeing the lead-wire andperpendicular cl2 are perpendicular to bar, and cl3 is very far from the bus-bar. If the distance between cl3 and bus-bar exceeds a certain value, the measuring voltage remains constant, which stands for the measured value with high precision. 5. Simulation and Experimental Results Energies 2017, 10, 1519 11 of 16 the bus-bar, and cl3 is very far from the bus-bar. If the distance between cl3 and bus-bar exceeds a certain value, the measuring voltage remains constant, which stands for the measured value with high precision. 5. Simulation and Experimental Results 5.1. Parameter Extraction Ansys Q3D software was used to extract the partial stray inductance of the laminated bus-bar model in this study to verify the measured values of partial stray inductance. For extraction of the partial stray inductance, a current source and sink must be set up. For a certain conductor, only one current sink is allowed, but multiple current sources are permitted in the Q3D software. Taking the proximity effect of the bus-bar into consideration, excitation is demanded for both a positive bus-bar and a negative bus-bar to simulate the model. The positive bus-bar terminals 9 and 11 are set as Source2 and Source1 and the capacitor anode is set as Sink1. Similarly, the negative bus-bar terminals 10 and 12 are set as Source4 and Source3 and the capacitor cathode is set as Sink2. The excitation source settings and simulated current density of the bus-bar is shown in Figure 14. Because the excitation has the opposite direction of the actual current, the simulated mutual inductance in the branches of the Energies 2017, 10, 1519 12 of of 17 positive bus-bar and negative bus-bar must be negative. The self inductance and mutual inductance the asymmetrical parallel branches are described in Table 1. Sink1 Sink2 Source3 Source1 Source4 Source2 Figure 14. The excitation source settings and simulated current density of the bus-bar. Figure 14. The excitation source settings and simulated current density of the bus-bar. Table 1. Simulated partial stray inductance matrix. Table 1. Simulated partial stray inductance matrix. nH Lσ 1 Lσ 2 Lσ 3 Lσ 4 nH Lσ1 Lσ1 Lσ2 Lσ1 Lσ3 Lσ2 Lσ4 Lσ3 22.72 22.72 23.95 23.95 − 1.56 − 7.56 −1.56 Lσ4 −7.56 Lσ2 23.95 23.95 37.42 37.42 −2.18 −14.5 −2.18 −14.5 Lσ3 −1.56 −1.56 −2.18 −2.18 17.18 17.48 17.18 17.48 Lσ4 −7.56 −7.56 −14.5 −14.5 17.48 17.48 29.37 29.37 In order to verify the accuracy of the simplified model, the stray inductance LσPc and LσNe should In orderbased to verify accuracy The of the simplified model, theas stray inductance LσPcpositive and LσNebus-bar should be extracted on the simulation. capacitor anode is set Source1, and the be extracted based on simulation. The capacitor anode is set as Source1, and the positive bus-bar terminals 9 and 11 are set as Sink1. Similarly, the negative bus-bar terminals 10 and 12 are set as terminalsand 9 and are set cathode as Sink1.isSimilarly, the The negative bus-bar terminals 10 and 12 are set as Source2 the 11 capacitor set as Sink2. simplified model excitation source settings Source2 and the capacitor cathode is set as Sink2. The simplified model excitation source settings and and current density of the bus-bar are shown in Figure 15. The simulated self inductance and mutual current density of the bus-bar are shown in Figure 15. The simulated self inductance and mutual inductance of the simplified branch shown in Figure 10 are described in Table 2. inductance of the simplified branch shown in Figure 10 are described in Table 2. source1 sink2 source2 sink1 In order to verify the accuracy of the simplified model, the stray inductance LσPc and LσNe should be extracted based on simulation. The capacitor anode is set as Source1, and the positive bus-bar terminals 9 and 11 are set as Sink1. Similarly, the negative bus-bar terminals 10 and 12 are set as Source2 and the capacitor cathode is set as Sink2. The simplified model excitation source settings and current density of the bus-bar are shown in Figure 15. The simulated self inductance and mutual Energies 2017, 10, 1519 12 of 16 inductance of the simplified branch shown in Figure 10 are described in Table 2. source1 sink2 source2 sink1 source2 sink1 Figure 15. The simplified model excitation source settings and current density of the bus-bar. Figure 15. The simplified model excitation source settings and current density of the bus-bar. Table 2. Simulated stray inductance matrix. Table 2. Simulated stray inductance matrix. nH nH LσPcLσPc LσNeLσNe LσPc LσPc 17.81 17.81 − 1.44 −1.44 LσNe LσNe −1.44 −1.44 16.46 16.46 The simplified inductance matrix calculated based on Equation (9) is shown in Table 3. Calculation results are compared with the simulated results in Table 2. They have only 1 nH difference. That means the calculated values can match the simulated values very well, and the simplified method is accurate. Table 3. Calculated stray inductance matrix. nH LσPc LσNe LσPc LσNe 19.14 −1.51 −1.51 17.15 5.2. Experimental Measurement In order to measure the branch stray inductance, the inverter testing platform is constructed as shown in Figure 16. The measuring equipment and power device are shown in Table 4. It must be noted that the oscilloscope must have the function of multi-channel digital integral that can measure the stray inductance of the two parallel branches under the same conditions. The experimental test is classified as the direct measuring method and the indirect measuring method. For the indirect measuring method, a Rogowski coil is adopted to measure the transient current variation ratio in the four branches. Meanwhile, using the simulation value of the stray inductance and Equation (6), the equivalent stray inductance can be obtained. The direct measuring method can be realized by the method proposed by the paper. Table 4. The experimental equipment. Equipment Parameter IGBT module IGBT driver Rogowski coil Voltage probe Oscilloscope Inductive load FF1400R12IP4 2SP0320V2A0 CWT30B Agilent-10073C Agilent-MSO8064A About 7uH the stray inductance of the two parallel branches under the same conditions. The experimental test is classified as the direct measuring method and the indirect measuring method. For the indirect measuring method, a Rogowski coil is adopted to measure the transient current variation ratio in the four branches. Meanwhile, using the simulation value of the stray inductance and Equation (6), the equivalent stray inductance can be obtained. The direct measuring method can be realized by the Energies 2017, 10, 1519 13 of 16 method proposed by the paper. Laminated busbar Busbar capacitor IGBT module And driver Measuring wire Rogowski coil Figure Figure 16. 16. The The experimental experimental platform. platform. Table 4. The experimental equipment. 5.3. Indirect Measurement Equipment Due to the excellent linearity of the transient currentParameter of the IGBT module at the turn-on transient, IGBT the indirect measurement takes themodule turn-on transient asFF1400R12IP4 an example. In order to verify the consistency Energies 2017, 10, 1519 14 of 17 IGBT 2SP0320V2A0 of the transient current’s change ratedriver under different testing conditions, a double pulse test is applied Rogowski coil leg testing circuit CWT30B on S1 and S2. At first, according to the phase shown in Figure 5, S1 is tested with a double pulse, then, upon switching the position of the load, S2 is tested also with the double pulse. Voltage the probe Agilent-10073C double pulse, then, upon switching position of the load, S2 is tested also with the double pulse. The transient current i1, i2, i3, and i4 shown in Figure 17a,b, corresponding to the second turn-on of Agilent-MSO8064A The transient current i1 , i2 , i3Oscilloscope , and i4 shown in Figure 17a,b, corresponding to the second turn-on lower module S2 and upper module S1, and their main difference is the current magnitude and Inductive load About 7uH of lower module S2 and upper module S1, and their main difference is the current magnitude and direction before turn on. The variation in the transient current is basically consistent after turning on. direction before turn on. The variation in the transient current is basically consistent after turning Choosing Δt = t1 − t2 = 100ns and recording the difference of the two moments, because the 5.3. Measurement on. Indirect Choosing ∆t = t1 − t2 = 100 ns and recording the difference of the two moments, because the oscilloscope has sampling error, tests are made many times for each testing method to compute the oscilloscope has sampling error, tests made many times forIGBT eachmodule testing at method to compute the Due to the excellent linearity of theare transient current of the the turn-on arithmetic mean value to raise measurement accuracy. Table 5 shows the average valuestransient, for fifty arithmetic mean value to raise measurement accuracy.asTable 5 shows In theorder average valuesthe for fifty repeat the indirect measurement takes the turn-on transient an example. verify repeat measurements of the upper IGBT module and lower IGBT module atto the turn-on consistency transient. measurements of the upper IGBT module and lower IGBT module at the turn-on transient. of the transient current’s change rate under different testing conditions, a double pulse test is applied on S1 and S2. At first, according to the phase leg testing circuit shown in Figure 5, S1 is tested with a (a) (b) Figure 17. 17. The The current current waveform waveform at at the the turn-on turn-on transient. transient. (a) Second turning-on turning-on of S2; (b) (b) Second Second Figure (a) Second of S2; turning-on of of S1. S1. turning-on Table 5. Measured Measured current current values. values. Table 5. Δi(A) S1 S1 S2 ∆i(A) S2 Δi1 ∆i1 104.57 104.57 106.25 106.25 Δi2 ∆i2 76.71 76.71 75.21 75.21 Δi3 ∆i 66.363 66.36 70.35 70.35 Δi4 ∆i 108.46 4 108.46 110.36 110.36 According to Equations (4), (6), and Table 1, the partial stray inductance can be calculated, as shown in Table 6. The difference of the two measured methods is within 5 nH, mainly deriving from the sampling error of the oscilloscope. Table 6. Calculated inductance based on Tables 1 and 3. Energies 2017, 10, 1519 14 of 16 According to Equations (4), (6), and Table 1, the partial stray inductance can be calculated, as shown in Table 6. The difference of the two measured methods is within 5 nH, mainly deriving from the sampling error of the oscilloscope. Table 6. Calculated inductance based on Tables 1 and 3. nH Lσ 1 Lσ 2 Lσ 3 Lσ 4 Turn on transient of S1 Turn on transient of S2 Difference 31.45 30.69 0.76 47 47.9 0.9 40.68 39.8 0.88 28.11 24 4.11 5.4. Direct Measurement The direct measurement is based on the inductance voltage integral method regardless of the current linearity. Therefore, it can be realized at the turn-on transient or the turn-off transient. The voltage sampling error is very small, because the voltage is based on digital integration function. However, the current is sampled at t1 and t2 moments, so the current sampling error is relatively large. In order to raise measurement precision, tests are made many times at both the turn-on transient and the turn-off transient. Due to the limited channel amounts of the oscilloscope, Lσ1 and Lσ2 are extracted firstly, as shown in Figure 18a,b, in which the i1 and i2 are the current waveforms at the switching transient in branches Energies 2017, 10, 1519 15 of 17 Lσ1 and Lσ2 . Also, uL1 and uL2 are the voltage waveforms at the switching transients on branches L is observed voltage variation is basically consistent at the switching transient. σ1 and and Lσ2. LItσ2is. It observed thatthat the the voltage variation is basically consistent at the switching transient. f1 fand and f represent the time integral of u and u and the integral time is 100 ns. 1 2 L1 uL2 and L2 the integral time is 100 ns. f2 represent the time integral of uL1 and (a) (b) Figure transient. Figure 18. 18. The The test test waveform waveform at at the the turn-off turn-off transient. transient. (a) (a) Turn-on Turn-on transient; transient; (b) (b) Turn-off Turn-off transient. The partial stray inductance for Lσ1 and Lσ2, based on the turn-on transient and the turn-off The partial stray inductance for Lσ1 and Lσ2 , based on the turn-on transient and the turn-off transient, are listed in Table 7. According to the same testing conditions, Lσ3 and Lσ4 are measured, as transient, are listed in Table 7. According to the same testing conditions, Lσ3 and Lσ4 are measured, as shown in Table 7. It is observed that the measurement difference is within 3 nH at both the turn-on shown in Table 7. It is observed that the measurement difference is within 3 nH at both the turn-on transient and the turn-off transient, so the turn-on transient and the turn-off transient are valid for transient and the turn-off transient, so the turn-on transient and the turn-off transient are valid for the the extraction of partial stray inductance. extraction of partial stray inductance. Table 7. The measured values of Lσ1 and Lσ2. Table 7. The measured values of Lσ1 and Lσ2 . nH Lσ1 Lσ2 L σ 2 30.56 45.6 Turn-onTurn-off transienttransient 30.56 31.37 45.6 42.77 Turn-off transient Difference 31.37 0.81 42.77 2.83 nH Lσ 1 Turn-on transient Difference 0.81 2.83 Lσ3 Lσ 3 39.56 39.56 41.37 41.37 1.81 1.81 Lσ4 26.6 Lσ 4 27.57 26.6 0.97 27.57 0.97 The stray inductance mean values obtained from indirect measurement and direct measurement are shown in Table 8. The measurement difference is within 5 nH so the consistency is very high. Table 8. Comparison of stray inductance based on indirect and direct measurements. nH Lσ1 Lσ2 Lσ3 Lσ4 Energies 2017, 10, 1519 15 of 16 The stray inductance mean values obtained from indirect measurement and direct measurement are shown in Table 8. The measurement difference is within 5 nH so the consistency is very high. Table 8. Comparison of stray inductance based on indirect and direct measurements. nH Lσ1 Lσ2 Lσ3 Lσ4 Indirect measurement Direct measurement Difference 31.56 30.9 0.66 47.4 44.19 3.21 40.24 40.46 0.22 26.01 27.1 1.01 LσPc and LσNe are measured based on the proposed direct measuring method. As shown in Table 9, the measurement values are almost the same as the simulation values and the calculated values. So, simulation, calculation, and measurement can validate each other, which can further prove the accuracy of the modeling and measuring method. Table 9. Comparison of stray inductance based on simulation, calculation, and measurement. Method LσPc LσNe simulation calculation measurement 16.37 17.6 17.2 15.02 15.6 16.1 6. Conclusions In this paper, the laminated bus-bar of a three-phase inverter in an electric vehicle with asymmetric branching is investigated. For the first time, the imbalanced transient current on the bus-bar is deeply analyzed from the view of stray inductance energy storage and release. The partial self-inductance and mutual-inductance model of the asymmetrical parallel branches on the bus-bar is built and the technique to reduce the equivalent inductance circuit models is developed based on matrix calculation. Furthermore, a high-precision partial inductance measuring method considering spatial electromagnetic transient field is proposed. At last, both the simulation values based on Q3D and the calculation values based on matrix calculation are verified using the proposed direct and indirect measurement methods. For future work, frequency-domain simulations will be conducted to investigate the effects of the asymmetrical stray inductance on the inverter’s EMI performance. This will provide insight for effective component layout inside the enclosure of EV inverters. Acknowledgments: The project is supported by the National Key Research and Development Program of China (2016YFC0600906). Author Contributions: Fengyou He and Chengfei Geng conceived and designed the experiments. Chengfei Geng designed and performed the simulations. Jingwei Zhang performed the experiments. Chengfei Geng and Hongsheng Hu wrote the paper. Conflicts of Interest: The authors declare no conflict of interest. References 1. 2. Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [CrossRef] Bucher, A.; Schmidt, R.; Werner, R.; Leipenat, M.; Hasenohr, C.; Werner, T.; Schmitz, S.; Heitmann, A. Design of a Full SiC Voltage Source Inverter for Electric Vehicle Applications. In Proceedings of the 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–10. Energies 2017, 10, 1519 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 16 of 16 Liu, J.; Sun, W.; Su, W.; Tai, X.; Wen, X. Inverter Output Power Density Increasing Technologies for EV/HEV Applications. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–4. Mühlfeld, O.; Paulsen, L.; Olesen, K.; Ströbel-Maier, H. Automotive Traction Inverter for Highest Power Density. In Proceedings of the International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 19–20 May 2015; pp. 871–878. Caponet, C.; Profumo, D.; Doncker, W. Low stray inductance bus bar design and construction for good EMC performance in power electronic circuit. IEEE Trans. Power Electron. 2002, 17, 225–231. [CrossRef] Chen, C.; Pei, X.; Chen, Y.; Kang, Y. Investigation, Evaluation, and Optimization of Stray Inductance in Laminated Busbar. IEEE Trans. Power Electron. 2014, 29, 3679–3693. [CrossRef] Wang, J.; Yang, B.-J.; Xu, Z.-X.; Deng, Y.; Zhao, R.-X.; He, X.-N. Configuration of Low Inductive Laminated Bus Bar in 750 kVA NPC Three-level Universal Converter Module of High Power Density. Proc. CSEE 2010, 30, 47–54. Callegaro, A.D.; Guo, J.; Eull, M.; Gibson, J.; Preindl, M.; Bilgin, B. Bus Bar Design for High-Power Inverters. IEEE Trans. Power Electron. 2017. [CrossRef] Xuesong, W.; Zhengming, Z.; Liqiang, Y. Conducted EMI Reduction in IGBT Based Converters. In Proceedings of the Asia-Pacific International Conference on Electromagnetic Compatibility (APEC), Beijing, China, 12–16 April 2010. Khan, M.; Magne, P.; Bilgin, B.; Wirasingha, S.; Emadi, A. Laminated Busbar Design Criteria in Power Converters for Electrified Powertrain Applications. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–6. Dong, Y.F.; Luo, H.Z.; Yang, H.Y.; He, Y.M.; Li, W.H.; He, X.G. Engineering Design for Structure and Bus Bar of 1.2MV·A Hybrid Clamped Five-Level Converter Module. Trans. China Electrotech. Soc. 2016, 31, 11–18. Schanen, J.L.; Clavel, E.; Roudet, J. Modeling of Low Inductive Bus bar Connection. IEEE Ind. Appl. Mag. 1996, 2, 39–43. [CrossRef] Ruehli, A.E. Inductance Calculations in a Complex Integrated Circuit Environment. IBM J. Res. Dev. 1972, 16, 470–481. [CrossRef] Paul, C.R. Inductance, Loop and Partial; Willey & Sons: New York, NY, USA, 2010; pp. 246–254. Bryant, A.T.; Vadlapati, K.K.; Starkey, J.P.; Goldney, A.P.; Kandi-lidis, S.Y.; Hinchley, D.A. Current distribution in high power laminated busbars. In Proceedings of the 14th European Conference on Power Electronics and Application, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. Pasterczyk, R.J.; Martin, C.; Guichon, J.-M.; Schanen, J.-L. Planar Busbar Optimization Regarding Current Sharing and Stray Inductance Minimization. In Proceedings of the European Conference on Power electronics and applications, Dresden, Germany, 11–14 September 2005; pp. 1–9. Zhang, N.; Wang, S.; Zhao, H. Develop Parasitic Inductance Model for the Planar Busbar of an IGBT H Bridge in a Power Inverter. IEEE Trans. Power Electron. 2015, 30, 6924–6933. [CrossRef] Eupec marketing department; European Power Semiconductor; Electronics Company. Measurement of the Circuit Stray Inductance Lσ; Application Note; European Power Semiconductor and Electronics Company: Warstein, Germany, 1999. Zhu, H.; Hefner, R.; Allen, R.; Lai, J.-S. Characterization of power electronics system interconnect parasitics using time domain reflectometry. IEEE Trans. Power Electron. 1999, 14, 622–628. Feng, G.; Yuan, L.; Zhao, Z.; Zhao, J.; Lu, T. A Novel Stray Inductance Extraction Method for Bus Bars Based on Turn-on/off Transient Process. Proc. CSEE 2014, 34, 6442–6449. Wen, H.; Liu, J.; Zhang, X.; Wen, X. Electric Vehicle Drive Inverters Simulation Considering Parasitic Parameters. In Proceedings of the 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; pp. 417–421. © 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).