Bedford.stat.cvr.SE.mech
4/3/08
00:22
Página 1
MECÁNICA PARA INGENIERÍA
ESTÁTICA
Quinta edición
Bedford | Fowler
2A Y 3A FORROS
11/3/08
12:54
Página 1
y
Factores de conversión de unidades
TIEMPO
ACELERACIÓN
1 min = 60 s
1 h = 60 min = 3600 s
1 día = 24 h = 86,400 s
1 m/s2 = 3.281 pies/s2 = 39.37 pulg/s2
1 pulg/s2 = 0.08333 pie/s2 = 0.02540 m/s2
1 pie/s2 = 0.3048 m/s2
1 g = 9.81 m/s2 = 32.2 pies/s2
LONGITUD
1 m = 3.281 pies = 39.37 pulg
1 km = 0.6214 mi
1 pulg = 0.08333 pie = 0.02540 m
1 pie = 12 pulg = 0.3048 m
1 mi = 5280 pies = 1.609 km
1 milla náutica = 1852 m = 6080 pies
ÁNGULO
1 rad = 180/p grad = 57.30 grad
1 grad = p/180 rad = 0.01745 rad
1 revolución = 2p rad = 360 grad
1 rev/min (rpm) = 0.1047 rad/s
ÁREA
1 mm2 = 1.550 ⫻ 10⫺3 pulg2 = 1.076 ⫻ 10⫺5 pies2
1 m2 = 10.76 pies2
1 pulg2 = 645.2 mm2
1 pie2 = 144 pulg2 = 0.0929 m2
VOLUMEN
1 mm3 = 6.102 ⫻ 10⫺5 pulg3 = 3.531 ⫻ 10⫺8 pies3
1 m3 = 6.102 ⫻ 104 pulg3 = 35.31 pies3
1 pulg3 1.639 ⫻ 104 mm3 = 1.639 ⫻ 10⫺5 m3
1 pie3 = 0.02832 m3
VELOCIDAD
y
b
R
Área =
1
R 2
4
Ix = Iy =
1
R 4 ,
16
I xy =
1
ab
4
1
I x = ab 3 ,
16
1 4
R
8
Área =
y
α
(n ⫹
4n ⫹ 2
x
(n ⫹ 1)b
n⫹2
b
Sector circular
Enjuta
POTENCIA
1 W = 1 N-m/s = 0.7376 pie-lb/s = 1.340 ⫻ 10
1 pie-lb/s = 1.356 W
1 hp = 550 pies-lb/s = 746 W
y ⫽ cxn
α
1 J = 1 N-m = 0.7376 pie-lb
1 pie-lb 1.356 J
1 2 2
ab
8
1)cbn
2R sen α
3α
TRABAJO Y ENERGÍA
I xy =
y
R
O
1
a 3b,
16
Iy =
FUERZA
1 N = 0.2248 lb
1 lb = 16 oz = 4.448 N
1 kip = 1000 lb = 4448 N
1 ton = 2000 lb = 8896 N
a
Área de un cuarto de elipse
Área de un cuarto de círculo
1 kg = 0.0685 slug
1 slug = 14.59 kg
1 t (tonelada métrica) = 103 kg = 68.5 slug
y2 1
⫽
b2
x
4a
3π
4R
3π
⫹
4b
3π O
x
O
MASA
x2
a2
Área = ␣R 2
⫺3
hp
R 4 ⎛⎜ ␣ −
⎝
Ix =
sen 2␣ ⎞⎟
⎠
Iy =
R 4 ⎛⎜ ␣ + sen 2␣⎞⎟ ,
⎝
⎠
2
I xy = 0
PRESIÓN
cb n+1
n+
c3b 3n+1
Ix =
n+
Área =
Iy =
cb n+3
n+
I xy =
1 Pa = 1 N/m2 = 0.0209 lb/pie2 = 1.451 ⫻ 10⫺4 lb/pulg2
1 bar = 105 Pa
1 lb/pulg2 (psi) = 144 lb/pie2 = 6891 Pa
1 lb/pie2 = 6.944 ⫻ 10⫺3 lb/pulg2 = 47.85 Pa
y
1 m/s = 3.281 pies/s = 39.37 pulg/s
1 km/h = 0.2778 m/s = 0.6214 mi/h = 0.9113 pie/s
1 mi/h = (88/60) pies/s = 1.609 km/h = 0.4470 m/s
1 nudo = 1 milla náutica/h = 0.5144 m/s = 1.689 pies/s
L
x=
x
L
y=
L
y
z
∫ x dL ,
∫ dL
z
x
∫ y dL ,
∫ dL
z=
L
L
∫ z dL .
∫ dL
L
L
y
y
R
R
y
α
x
2R
π
2R
π
Arco semicircular
α
R
x
2R
π
Arco de un cuarto de círculo
2R sen α
α
Arco circular
x
c 2 b 2 n+ 2
4n + 4
2A Y 3A FORROS
11/3/08
12:54
Página 1
y
y
b
R
Ix = Iy =
1
R 4 ,
16
I xy =
1
ab
4
1
I x = ab 3 ,
16
1 4
R
8
Área =
y
1
a 3b,
16
Iy =
I xy =
1 2 2
ab
8
y
R
α
y ⫽ cxn
x
α
O
a
Área de un cuarto de elipse
Área de un cuarto de círculo
1
R 2
4
y2 1
⫽
b2
x
4a
3π
4R
3π
⫹
4b
3π O
x
O
Área =
x2
a2
(n ⫹
4n ⫹ 2
1)cbn
2R sen α
3α
x
(n ⫹ 1)b
n⫹2
b
Sector circular
Enjuta
Área = ␣R 2
1 4⎛
1
1
1
R ⎜ ␣ − sen 2␣ ⎞⎟ , I y = R 4 ⎛⎜ ␣ + sen 2␣⎞⎟ ,
⎠
⎠
4 ⎝
2
4 ⎝
2
I xy = 0
Ix =
cb n+1
n +1
c3b 3n+1
Ix =
,
9n + 3
Área =
Iy =
cb n+3
,
n+3
I xy =
Líneas
Las coordenadas del centroide de la línea L son
y
L
x=
x
L
y=
L
y
z
∫ x dL ,
∫ dL
z
x
∫ y dL ,
∫ dL
z=
L
L
∫ z dL .
∫ dL
L
L
y
y
R
R
y
α
x
2R
π
2R
π
Arco semicircular
α
R
x
2R
π
Arco de un cuarto de círculo
2R sen α
α
Arco circular
x
c 2 b 2 n+ 2
4n + 4
Mecánica para ingeniería
ESTÁTICA
Mecánica para ingeniería
ESTÁTICA
QUINTA EDICIÓN
Anthony Bedford • Wallace Fowler
University of Texas at Austin
TRADUCCIÓN
Jesús Elmer Murrieta Murrieta
Maestro en Investigación de Operaciones
Instituto Tecnológico y de Estudios Superiores
de Monterrey, Campus Morelos
REVISIÓN TÉCNICA
Miguel Ángel Ríos Sánchez
Departamento de Ingeniería Mecánica y Mecatrónica
Instituto Tecnológico y de Estudios Superiores
de Monterrey, Campus Estado de México
Alex Elías Zúñiga
Departamento de Ingeniería Mecánica
Instituto Tecnológico y de Estudios Superiores
de Monterrey, Campus Monterrey
Datos de catalogación bibliográfica
BEDFORD, ANTHONY; FOWLER, WALLACE T.
Mecánica para ingeniería. Estática
Quinta edición
PEARSON EDUCACIÓN, México, 2008
ISBN: 978-970-26-1215-5
Área: Ingeniería
Formato: 20 ⫻ 25.5 cm
Páginas: 656
Authorized translation from the English language edition, entitled Engineering mechanics: Statics 5th edition by Anthony M. Bedford and Wallace T.
Fowler, published by Pearson Education, Inc., publishing as Prentice Hall, Copyright © 2008. All rights reserved.
ISBN 0136129153
Traducción autorizada de la edición en idioma inglés titulada Engineering mechanics: Statics 5th edition por Anthony M. Bedford y Wallace T. Fowler,
publicada por Pearson Education, Inc., publicada como Prentice Hall, Copyright © 2008. Todos los derechos reservados.
Esta edición en español es la única autorizada.
Edición en español
Editor: Luis Miguel Cruz Castillo
e-mail: luis.cruz@pearsoned.com
Editor de desarrollo: Bernardino Gutiérrez Hernández
Supervisor de producción: Rodrigo Romero Villalobos
Edición en inglés
Vice President and Editorial Director, ECS: Marcia J. Horton
Acquisitions Editor: Tacy Quinn
Associate Editor: Dee Bernhard
Managing Editor: Scott Disanno
Media Editor: David Alick
Marketing Manager: Tim Galligan
Production Editor: Craig Little
Director of Creative Services: Paul Belfanti
Creative Director: Juan Lopez
Art Director: Jonathan Boylan
Interior Designer: Kenny Beck
Cover Designer: Jonathan Boylan
Art Editor: Xiaohong Zhu
Manufacturing Manager: Alexis Heydt-Long
Manufacturing Buyer: Lisa McDowell
QUINTA EDICIÓN, 2008
D.R. © 2008 por Pearson Educación de México, S.A. de C.V.
Atlacomulco 500-5o. piso
Col. Industrial Atoto
53519, Naucalpan de Juárez, Estado de México
Cámara Nacional de la Industria Editorial Mexicana. Reg. Núm. 1031.
Prentice Hall es una marca registrada de Pearson Educación de México, S.A. de C.V.
Reservados todos los derechos. Ni la totalidad ni parte de esta publicación pueden reproducirse, registrarse o transmitirse, por un sistema de recuperación
de información, en ninguna forma ni por ningún medio, sea electrónico, mecánico, fotoquímico, magnético o electroóptico, por fotocopia, grabación o
cualquier otro, sin permiso previo por escrito del editor.
El préstamo, alquiler o cualquier otra forma de cesión de uso de este ejemplar requerirá también la autorización del editor o de sus representantes.
ISBN 10: 970-26-1215-2
ISBN 13: 978-970-26-1215-5
Impreso en México. Printed in Mexico.
1 2 3 4 5 6 7 8 9 0 - 11 10 09 08
Contenido
Prefacio
xiii
Acerca de los autores
xix
1 Introducción 3
1.1
Ingeniería y mecánica
4
Resolución de problemas 4
Números
5
Espacio y tiempo 5
Leyes de Newton 6
Sistema internacional de unidades 7
Unidades de uso común en Estados Unidos
Unidades angulares 8
Conversión de unidades 8
1.2
Gravitación de Newton
8
15
v
vi
Contenido
2 Vectores
2.1
21
Escalares y vectores
22
Suma vectorial 22
Producto de un escalar y un vector
Resta vectorial 24
Vectores unitarios 24
2.2
24
Componentes en dos dimensiones
30
Manipulación de vectores en términos de sus componentes
Vectores de posición en términos de sus componentes 31
Manipulación de vectores en términos de sus componentes
Vectores de posición en términos de sus componentes 32
2.3
Componentes en tres dimensiones
43
Magnitud de un vector en términos de sus componentes 44
Cosenos directores 45
Vectores de posición en términos de sus componentes 46
Componentes de un vector paralelo a una línea dada 46
Cosenos directores 47
Vectores de posición en términos de sus componentes 48
Componentes de un vector paralelo a una línea dada 48
2.4
Productos punto
60
Definición 60
Productos punto en términos de sus componentes 60
Componentes vectoriales paralela y normal a una línea
2.5
Productos cruz
68
Definición 68
Productos cruz en términos
de sus componentes 69
Evaluación de un determinante de 3 * 3
Productos triples mixtos 70
Problemas de repaso 77
3 Fuerzas
3.1
70
81
Fuerzas, equilibrio
y diagramas de cuerpo libre
Terminología 82
Fuerzas gravitatorias 82
Fuerzas de contacto 83
Equilibrio 86
Diagramas de cuerpo libre
82
87
3.2
Sistemas bidimensionales de fuerzas
91
3.3
Sistemas tridimensionales de fuerzas
108
Problemas de repaso
116
61
30
32
Contenido
4 Sistemas de fuerzas y momentos
4.1
4.2
Descripción bidimensional
del momento 122
Vector de momento
134
Magnitud del momento 134
Dirección del momento 134
Relación con la descripción bidimensional
Teorema de Varignon 137
4.3
121
136
Momento de una fuerza respecto a una línea
147
Definición 148
Aplicaciones 148
Determinación del momento de una fuerza F
respecto a una línea L 151
Casos especiales 151
4.4
Pares
162
4.5
Sistemas equivalentes
171
Condiciones de equivalencia 171
Representación de sistemas mediante sistemas equivalentes 172
Representación de un sistema mediante una llave de torsión 173
Sistemas equivalentes de fuerzas y momentos 175
Representación de sistemas de fuerzas y momentos mediante
sistemas equivalentes 176
Problemas de repaso 189
5 Objetos en equilibrio
5.1
Aplicaciones bidimensionales
Ecuaciones de equilibrio escalares
Soportes 196
Diagramas de cuerpo libre 200
Ecuaciones de equilibrio 201
Soportes 201
5.2
195
196
196
Cuerpos estáticamente indeterminados
217
Soportes redundantes 217
Soportes impropios 219
5.3
Aplicaciones tridimensionales
Ecuaciones de equilibrio escalares
Soportes 223
Ecuaciones de equilibrio 229
Soportes 229
5.4
223
223
Elementos sometidos a dos y tres fuerzas
Elementos de dos fuerzas 242
Elementos de tres fuerzas 244
Problemas de repaso 249
242
vii
viii
Contenido
6 Estructuras en equilibrio
6.1
6.2
Armaduras
255
256
Método de las juntas
258
Método de las juntas 261
Juntas especiales 261
6.3
Método de secciones
Método de secciones
6.4
6.5
268
269
Armaduras espaciales
275
Bastidores y máquinas
282
Análisis de la estructura completa
Análisis de los elementos 283
Problemas de repaso 306
283
7 Centroides y centros de masa
7.1
Centroides de áreas
7.2
Áreas compuestas
7.3
Cargas distribuidas
311
312
320
327
Descripción de una carga distribuida 328
Determinación de la fuerza y el momento 328
Analogía del área 329
7.4
Centroides de volúmenes y líneas
7.5
Volúmenes y líneas compuestos
7.6
Teoremas de Pappus-Guldinus
335
343
350
Primer teorema 350
Segundo teorema 351
Primer teorema de Pappus-Guldinus 352
Segundo teorema de Pappus-Guldinus 352
7.7
7.8
Centros de masa de objetos
355
Centros de masa de objetos compuestos
Problemas de repaso
369
362
Contenido
8 Momentos de inercia
Áreas
375
376
8.1
Definiciones
8.2
Teorema de los ejes paralelos
383
8.3
Ejes girados y ejes principales
396
Ejes girados 396
Momento de inercia respecto al eje x⬘
Momento de inercia respecto al eje y⬘
Ejes principales 397
397
397
8.4
376
Círculo de Mohr
405
Sistema coordenado x y y sistema coordenado girado x'y'.
Determinación de ejes principales y de momentos
de inercia principales 406
Masas
8.5
409
Objetos simples
Barras delgadas
Placas delgadas
8.6
Teorema de los ejes paralelos
Problemas de repaso
9 Fricción
9.1
409
409
410
415
425
429
Teoría de la fricción seca
430
Coeficientes de fricción 432
Ángulos de fricción 433
9.2
Cuñas
448
9.3
Roscas
452
9.4
Cojinetes
9.5
Cojinetes de empuje axial y embragues
9.6
Fricción en bandas
459
Problemas de repaso
471
479
464
405
ix
x
Contenido
10 Fuerzas y momentos internos
Vigas
485
486
10.1 Fuerza axial, fuerza cortante
y momento flector
486
10.2 Diagramas de fuerza cortante
y de momento flector
493
10.3 Relaciones entre carga distribuida,
fuerza cortante
y momento flector
498
Construcción del diagrama de fuerza cortante 500
Construcción del diagrama de momento flector 501
Cables
511
10.4 Cargas uniformemente distribuidas
a lo largo de líneas rectas
512
Forma del cable 512
Tensión en el cable 513
Longitud del cable 513
10.5 Cargas distribuidas uniformemente
a lo largo de cables
518
Forma del cable 519
Tensión en el cable 520
Longitud del cable 520
10.6 Cargas discretas en cables
523
Determinación de la configuración y las tensiones
Comentarios sobre modelos continuos y discretos
Líquidos y gases
529
10.7 Presión y centros de presión
Centro de presión 529
Presión en un líquido en reposo
Problemas de repaso 541
531
529
523
524
Contenido
11 Trabajo virtual y energía potencial
11.1 Trabajo virtual
545
546
Trabajo 546
Principio del trabajo virtual 547
Aplicación a estructuras 548
Trabajo 549
Principio del trabajo virtual 550
11.2 Energía potencial
558
Ejemplos de fuerzas conservativas 558
Principio del trabajo virtual para fuerzas conservativas
Estabilidad del equilibrio 560
Energía potencial 561
Problemas de repaso 569
559
APÉNDICES
A
Repaso de matemáticas
A.1
Álgebra
573
573
Ecuaciones cuadráticas
Logaritmos naturales
573
573
A.2
Trigonometría
574
A.3
Derivadas
574
A.4
Integrales
575
A.5
Series de Taylor
B
Propiedades de áreas y líneas
B.1
Áreas
B.2
Líneas
C
Propiedades de volúmenes y objetos
homogéneos
580
576
577
577
579
Soluciones a los problemas de práctica
Respuestas a los problemas
con número par
613
Índice
623
583
xi
Prefacio
El desarrollo de la quinta edición de Mecánica para Ingeniería: Estática y Dinámica comenzó al preguntarnos de qué manera podrían reestructurarse nuestros libros de texto para ayudar
a los estudiantes a aprender mecánica de manera más eficaz y
eficiente.
Desde las primeras ediciones, nuestro objetivo ha sido
presentar el material de una forma que emule el desarrollo de
los conceptos por parte del profesor en el salón de clases y enfatice el análisis visual para mejorar la comprensión del estudiante.
Ahora, con base en nuestras experiencias a través de muchos años en el salón de clases y los comentarios de colegas y
estudiantes, hemos diseñado la quinta edición para apegarnos a
la manera en que los estudiantes actualmente usan los libros de
texto para aprender mecánica. Durante el desarrollo de los nuevos elementos descritos anteriormente seguimos apegados a
nuestros objetivos originales de enseñar procedimientos eficaces para la resolución de problemas y la importancia central de
los diagramas de cuerpo libre.
Novedades en esta edición
Ejemplos activos
Un nuevo formato de ejemplo diseñado para ayudar a los estudiantes a aprender conceptos y métodos, y a probar la comprensión de los mismos. Los análisis se relacionan de manera
visual con figuras y ecuaciones en un diseño con ilustraciones
y texto integrados para una lectura eficiente. Al final del ejemplo activo se proporciona un “problema de práctica” de manera
que los estudiantes se vean motivados a verificar si comprendieron el material; y pueden evaluar fácilmente sus conocimientos al consultar la respuesta, que se proporciona en la
misma página, o estudiando la solución completa que se presenta en el apéndice, con el mismo formato de ilustraciones y
texto integrados.
Problemas con enfoque en ejemplos
Se incluyen nuevos problemas de tarea diseñados para incentivar a los alumnos a estudiar los ejemplos dados y expandir su
comprensión de los conceptos. Los números de estos problemas se mencionan al inicio de cada ejemplo, de manera que los
profesores puedan usarlos con facilidad para estimular el estudio de ciertos temas seleccionados.
Resultados
La mayoría de las secciones del libro ahora concluye con una
nueva subsección de resultados, una descripción completa y su-
ficiente de los resultados necesarios para entender los ejemplos
y problemas siguientes. Para una comprensión más fácil, se presentan en el mismo formato de ilustraciones y texto integrados
que se usa en los ejemplos activos y se puede consultar de manera eficiente estas subsecciones mientras se estudia el ejemplo y trabaja con los problemas.
Conjunto de problemas
En este texto de estática, treinta por ciento de los problemas
son nuevos. Se han marcado con un asterisco los que son relativamente más largos o difíciles. También es posible generar problemas adicionales usando el sistema de tareas en línea
con sus capacidades algorítmicas (vea el sitio Web de este
libro).
Elementos especiales de este texto
Ejemplos
Además de los nuevos ejemplos activos, mantenemos los que siguen una estructura con tres partes —Estrategia/Solución/Razonamiento crítico— diseñados para ayudar a los estudiantes
a desarrollar sus habilidades en la resolución de problemas de
ingeniería. En las secciones de estrategia, demostramos cómo
planear la solución de un problema, la cual presenta los pasos
detallados necesarios para llegar a los resultados requeridos.
Algunos de los ejemplos se concentran en el diseño y proporcionan análisis detallados de aplicaciones de la estática al
diseño de ingeniería.
Mecánica en computadoras
Algunos profesores prefieren enseñar estática sin dar énfasis al
uso de la computadora. Otros usan la estática como una oportunidad de introducir a los estudiantes al uso de las computadoras en ingeniería, y piden a los alumnos que escriban sus propios
programas en un lenguaje de nivel básico o que utilicen software de nivel superior para la resolución de problemas. Nuestro libro
es compatible con ambos enfoques. Existe material opcional de
mecánica en computadoras en el sitio Web Companion, donde se
incluyen tutoriales en MathCad y MATLAB. Para mayor información, vea la sección de suplementos.
Programa de ilustraciones
Reconocemos la importancia de ayudar a los estudiantes a visualizar los problemas de mecánica. Los alumnos prefieren y
se sienten más motivados con situaciones reales. Nuestros textos incluyen muchas fotografías y figuras realistas que ayudan
xiii
xiv
Prefacio
a visualizar las aplicaciones y proporcionar una conexión más
fuerte con la práctica de la ingeniería.
Uso del segundo color
Para ayudar a reconocer e interpretar los elementos de las figuras, hemos usado ciertos valores de identificación:
Estos participantes también revisaron el texto, los ejemplos y
los problemas para asegurar su exactitud. Cualquier error sigue
siendo responsabilidad de nosotros, los autores, y agradeceremos la comunicación de estudiantes y profesores en relación
con yerros o áreas de mejoramiento. Nuestra dirección de correo es Department of Aerospace Engineering and Engineering Mechanics, University of Texas at Austin, Texas 78712.
Nuestra dirección de correo electrónico es:
abedford@mail.utexas.edu.
Vectores unitarios
Recursos adicionales
Recursos para el estudiante
Fuerzas
Posiciones
Pares
El paquete de estudio Statics está diseñado para proporcionar a los estudiantes herramientas que mejoren sus
habilidades al dibujar diagramas de cuerpo libre, y para repasar los temas antes de los exámenes. Contiene una ayuda
para los diagramas de cuerpo libre con cincuenta problemas
de práctica de dificultad ascendente, los cuales incluyen soluciones completas. Las estrategias y recomendaciones adicionales ayudan a los estudiantes a comprender cómo utilizar
los diagramas en la resolución de problemas relacionados.
Este suplemento y material de repaso adicional para cada
capítulo fue preparado por Peter Schiavone de la University
of Alberta.
Evaluación en la red y tutoriales: Los estudiantes pueden
acceder a los recursos de ayuda, como los problemas de práctica complementarios, en el sitio Web de este libro.
www.pearsoneducacion.net/bedford
Triple verificación de la exactitud:
Compromiso con los estudiantes
y profesores
Nuestro compromiso con los estudiantes y profesores es tomar
precauciones para asegurar la exactitud del texto hasta donde
nuestra capacidad lo permita. Usamos un sistema de triple
verificación de la exactitud en el cual tres participantes, además de los autores, resuelven los problemas en un esfuerzo por
asegurar que las respuestas son correctas y que tienen un nivel
de dificultad apropiado. Nuestro equipo de exactitud se compone de:
• Scott Hendricks, de la Virginia Polythecnic University
• Karim Nohra de la University of South Florida
• Kurt Norlin del Laurel Technical Services
Adicionalmente, los profesores pueden asignar tareas en línea
a los estudiantes usando PH GradeAssist. Las respuestas y los
resultados se califican y registran de manera electrónica.
En cada tutorial se analiza un concepto básico de mecánica, y después se muestra cómo resolver un problema relacionado con este concepto usando MATLAB y MathCad. Estos
archivos están disponibles en formato PDF para que los profesores las distribuyan entre los estudiantes. Las hojas de trabajo
fueron desarrolladas por Ronald Larsen y Stephen Hunt de la
Montana State University-Bozeman.
Recursos para el profesor
Manual de soluciones para el profesor: Este suplemento,
disponible para los profesores en la página Web, contiene soluciones completas. Cada solución viene con el enunciado del
problema e ilustraciones asociadas. Cabe aclarar que todos estos
complementos están en idioma inglés.
Prefacio
Centro de recursos para el profesor: Contiene diapositivas en PowerPoint y archivos JPEG de todas las ilustraciones
del texto. También contiene series de diapositivas en PowerPoint que muestran cada ejemplo.
Glenn Beltz
University of California–Santa Barbara
Mary Bergs
Marquette University
Don L. Boyer
Evaluación en la red y recursos adicionales: A través
de PH GradeAssist, el profesor puede crear tareas en línea para
los estudiantes usando problemas del texto, los cuales están en
un formato algorítmico, de manera que cada alumno trabaje con
problemas un poco diferentes. Las respuestas a los problemas se
registran en un libro de calificaciones en línea que puede bajarse en Excel. Para recursos adicionales, acceda al sitio Web
del libro, donde encontrará series de problemas complementarios y demás información. Para mayores detalles contacte a su
representante de Pearson Educación.
Arizona State University
Spencer Brinkerhoff
Northern Arizona University
L. M. Brock
University of Kentucky
William (Randy) Burkett
Texas Tech University
Donald Carlson
University of Illinois
Major Robert M. Carpenter
Reconocimientos
Los siguientes colegas realizaron revisiones con base en su conocimiento y experiencia en la enseñanza, las cuales fueron de
gran ayuda al preparar tanto esta edición como las anteriores.
Shaaban Abdallah
University of Cincinnati
U.S. Military Academy
Douglas Carroll
University of Missouri, Rolla
Paul C. Chan
New Jersey Institute of Technology
Namas Chandra
Florida State University
James Cheney
Edward E. Adams
Michigan Technological University
George G. Adams
Northeastern University
Raid S. Al-Akkad
University of Dayton
Jerry L. Anderson
Memphis State University
James G. Andrews
University of Iowa
Robert J. Asaro
University of California, San Diego
University of California, Davis
Ravinder Chona
Texas A & M University
Daniel C. Deckler
The University of Akron Wayne College
Anthony DeLuzio
Merrimack College
Mitsunori Denda
Rutgers University
James F. Devine
University of South Florida
Craig Douglas
University of Massachusetts, Lowell
Marijan Dravinski
Leonard B. Baldwin
University of Wyoming
Haim Baruh
Rutgers University
University of Southern California
S. Olani Durrant
Brigham Young University
Estelle Eke
California State University, Sacramento
Gautam Batra
University of Nebraska
David M. Bayer
University of North Carolina
Bogdan I. Epureanu
University of Michigan
William Ferrante
University of Rhode Island
xv
xvi
Prefacio
Robert W. Fitzgerald
Worcester Polytechnic Institute
George T. Flowers
Auburn University
Mark Frisina
Wentworth Institute
Robert W. Fuessle
Bradley University
Walter Gerstle
University of New Mexico
William Gurley
University of Tennessee, Chattanooga
John Hansberry
University of Massachusetts, Dartmouth
Mark J. Harper
United States Naval Academy
W. C. Hauser
California Polytechnic University, Pomona
Linda Hayes
University of Texas–Austin
R. Craig Henderson
Tennessee Technological University
Paul R. Heyliger
Colorado State University
James Hill
University of Alabama
Robert W. Hinks
Arizona State University
Allen Hoffman
Worcester Polytechnic Institute
Edward E. Hornsey
University of Missouri, Rolla
Robert A. Howland
University of Notre Dame
Joe Ianelli
University of Tennessee, Knoxville
Ali Iranmanesh
Gadsden State Community College
David B. Johnson
Southern Methodist University
E. O. Jones, Jr.
Auburn University
Serope Kalpakjian
Illinois Institute of Technology
Kathleen A. Keil
California Polytechnic University, San Luis Obispo
Yohannes Ketema
University of Minnesota
Seyyed M. H. Khandani
Diablo Valley College
Charles M. Krousgrill
Purdue University
B. Kent Lall
Portland State University
Chad M. Landis
Rice Unversity
Kenneth W. Lau
University of Massachusetts, Lowell
Norman Laws
University of Pittsburgh
William M. Lee
U.S. Naval Academy
Donald G. Lemke
University of Illinois, Chicago
Richard J. Leuba
North Carolina State University
Richard Lewis
Louisiana Technological University
John B. Ligon
Michigan Tech University
Bertram Long
Northeastern University
V. J. Lopardo
U.S. Naval Academy
Frank K. Lu
University of Texas, Arlington
Mark T. Lusk
Colorado School of Mines
K. Madhaven
Christian Brothers College
Nels Madsen
Auburn University
James R. Matthews
University of New Mexico
Gary H. McDonald
University of Tennessee
James McDonald
Texas Technical University
Jim Meagher
California Polytechnic State University, San Luis Obispo
Lee Minardi
Tufts University
Prefacio
Norman Munroe
Florida International University
Shanti Nair
University of Massachusetts, Amherst
Saeed Niku
California Polytechnic State University,
San Luis Obispo
Mohammad Noori
North Carolina State University
Harinder Singh Oberoi
Western Washington University
James O’Connor
University of Texas, Austin
Samuel P. Owusu-Ofori
North Carolina A & T State University
Venkata Panchakarla
Florida State University
Assimina A. Pelegri
Rutgers University
Noel C. Perkins
University of Michigan
Corrado Poli
University of Massachusetts–Amherst
David J. Purdy
Rose-Hulman Institute of Technology
Yitshak Ram
Louisiana State University
Colin E. Ratcliffe
U.S. Naval Academy
Daniel Riahi
University of Illinois
Charles Ritz
California Polytechnic State University, Pomona
George Rosborough
University of Colorado, Boulder
Edwin C. Rossow
Northwestern University
Kenneth Sawyers
Lehigh University
Robert Schmidt
University of Detroit
Robert J. Schultz
Oregon State University
Richard A. Scott
University of Michigan
Brian Self
U.S. Air Force Academy
William Semke
University of North Dakota
Patricia M. Shamamy
Lawrence Technological University
Sorin Siegler
Drexel University
Peng Song
Rutgers State University
Candace S. Sulzbach
Colorado School of Mines
L. N. Tao
Illinois Institute of Technology
Craig Thompson
Western Wyoming Community College
John Tomko
Cleveland State University
Kevin Z. Truman
Washington University
John Valasek
Texas A & M University
Christine Valle
Georgia Institute of Technology
Dennis VandenBrink
Western Michigan University
Thomas J. Vasko
University of Hartford
Mark R. Virkler
University of Missouri, Columbia
William H. Walston, Jr.
University of Maryland
Andrew J. Walters
Mississippi University
Reynolds Watkins
Utah State University
Charles White
Northeastern University
Norman Wittels
Worcester Polytechnic Institute
Julius P. Wong
University of Louisville
T. W. Wu
University of Kentucky
Constance Ziemian
Bucknell University
xvii
xviii
Prefacio
Los elementos nuevos que diferencian esta edición de las
anteriores, particularmente la integración de texto e ilustraciones, fueron desarrollados con ayuda de estudiantes, colegas
y editores. Los revisores de las primeras pruebas nos motivaron
y sugirieron refinamientos útiles. Después de haber establecido
el nuevo formato, el apoyo que recibimos de Prentice Hall en el
desarrollo de los libros fue estupendo. Nuestra editora Tacy
Quinn organizó el gran esfuerzo en equipo que requieren los libros de este tipo y nos ofreció una ayuda entusiasta y consejos
valiosos. Marcia Horton y Tim Galligan hicieron la revisión
más importante desde las conversaciones iniciales acerca de
nuestras ideas hasta la publicación del libro. Craig Little continuó enseñándonos los detalles de la producción del libro y fue
el instrumento para mantener el proyecto dentro del calendario
establecido. De nuevo, Xiaohong Zhu nos proporcionó un apoyo
consumado en los aspectos relativos a ilustraciones y fotografías.
Dee Bernhard y Mack Patterson administraron nuestra comunicación con los revisores y usuarios de los libros. Jennifer Lons-
chein proporcionó apoyo editorial y de producción. David Alick,
Ben Paris y Kristin Mayo coordinaron el desarrollo de los recursos en línea que se han convertido en herramientas tan esenciales para los usuarios. Jonathan Boylan diseñó las portadas.
Agradecemos a Peter Schiavone por desarrollar los paquetes de
estudio que acompañan a los libros, y a Stephen Hunt y Ronald
Larsen por escribir los apoyos en MATLAB y MathCad. Scout
Hendricks, Karim Nohra y Kart Norlin, valiosos colegas de
nuestras campañas anteriores, nos dieron consejos con respecto al estilo y la claridad, corrigieron muchos de nuestros errores
y revisaron los manuales de solución. Somos responsables por
los errores que aún quedan. Nancy Bedford nos ofreció consejo editorial y nos ayudó con la revisión. Muchas otras personas talentosas y profesionales tanto de Prentice Hall como de
otras partes también contribuyeron en la revisión de este texto, por
lo que les estamos agradecidos. Y una vez más agradecemos a
nuestras familias, especialmente a Nancy y Marsha, por su paciencia y comprensión en la realización de las nuevas ediciones.
Anthony Bedford and Wallace Fowler
Austin, Texas
Acerca de los autores
Anthony Bedford (l ) y Wallace T. Fowler
Anthony Bedford es profesor emérito de Ingeniería Aeroespacial e Ingeniería Mecánica en la University of Texas at
Austin, y ha ejercido la docencia desde 1968. Es miembro de la
Academia de Maestros Distinguidos de la University of Texas.
Su actividad profesional principal ha sido la educación y la investigación en la mecánica para ingeniería. Ha escrito artículos
sobre teoría mixta, propagación de ondas y la mecánica de impactos a alta velocidad, y es autor de los libros Principio de
Hamilton en Mecánica Continua, Introducción a la Propagación
Elástica de Ondas (con D. S. Drumheller) y Mecánica de Materiales (con K. M. Liechti). Tiene experiencia industrial en
Douglas Aircraft Company, TRW, y Sandia National Laboratories.
Wallace T. Fowler es Profesor Centenario Paul D. & Betty
Robertson de ingeniería en la University of Texas y es director
del Consorcio de Apoyo Espacial de Texas. Pertenece al American Institute of Aeronautics and Astronautic (AIAAs) y a la
American Society for Engineering Education (ASEE). El
Dr. Fowler recibió el premio de excelencia en la enseñanza de
dinámica general en 1976, el premio John Leland Atwood
de AIAAA y ASEE en 1985 (para el mejor profesor en ingeniería aeroespacial), el premio a la enseñanza del consejo de
maestros de la University of Texas en 1990-1991, además
del premio a la enseñanza en diseño Fred Merryfield de ASEE
en 1994. En 1997 fue seleccionado para pertenecer a la academia de profesores distinguidos de la University of Texas. El
Dr. Fowler también se desempeñó como presidente de la American Society for Engineering Education (ASEE) de 2000 a
2001. Los intereses del Dr. Fowler relativos a la investigación
y la enseñanza en la UT, en Austin, se enfocan en la ingeniería y el diseño de sistemas espaciales.
xix
Mecánica para ingeniería
ESTÁTICA
CAPÍTULO
1
Introducción
¿Cómo diseñan y construyen los ingenieros los dispositivos
que se usan en la vida diaria, desde objetos simples como sillas
y sacapuntas hasta estructuras complicadas como presas,
automóviles, aviones y naves espaciales? Ellos deben tener un
conocimiento profundo de la física subyacente al diseño de tales
dispositivos y ser capaces de usar modelos matemáticos para
predecir su comportamiento. Al estudiar mecánica, los
estudiantes de ingeniería comienzan a aprender cómo analizar y
predecir los comportamientos de los sistemas físicos.
Los ingenieros utilizan los principios de la estática en cada paso del diseño y
ensamble de una estructura. La estática es una de las ciencias sobre las que se
basa el arte del diseño estructural.
4
Capítulo 1 Introducción
1.1 Ingeniería y mecánica
ANTECEDENTES
¿Cómo pueden los ingenieros diseñar sistemas complejos y predecir sus características antes de construirlos? Los ingenieros siempre han confiado en su conocimiento de diseños anteriores, en experimentos y en su ingenio y creatividad para
producir nuevos diseños. Los ingenieros modernos tienen además una poderosa técnica: desarrollan ecuaciones matemáticas basadas en las características físicas de los
objetos que diseñan. Con estos modelos matemáticos predicen el comportamiento de
sus diseños, los modifican y los prueban antes de su construcción real: los ingenieros aeroespaciales usan modelos matemáticos para predecir las rutas que seguirá un
trasbordador espacial durante su vuelo; los ingenieros civiles usan modelos matemáticos para analizar los efectos de las cargas sobre edificios y sus cimientos.
En su nivel más básico, la mecánica es el estudio de las fuerzas y sus efectos.
La mecánica elemental se divide en estática, que es el estudio de los objetos en
equilibrio, y dinámica, que es el estudio de los objetos en movimiento. Los resultados obtenidos en la mecánica elemental se aplican directamente a muchos campos de la ingeniería. Los ingenieros civiles y mecánicos que diseñan estructuras
usan ecuaciones de equilibrio obtenidas por medio de la estática. Tanto los ingenieros civiles que analizan las respuestas de edificios frente a terremotos, como los
ingenieros aeroespaciales que determinan las trayectorias de satélites, usan las
ecuaciones de movimiento obtenidas de la dinámica.
La mecánica fue la primera ciencia analítica, por eso los conceptos fundamentales, los métodos analíticos y las analogías de la mecánica se encuentran casi
en todas las ramas de la ingeniería. Los estudiantes de ingeniería química y eléctrica aprecian de una manera más profunda conceptos básicos de sus campos,
como el equilibrio, la energía y la estabilidad al aprenderlos en sus contextos
mecánicos originales. Cuando estudian mecánica vuelven a trazar el desarrollo
histórico de esas ideas.
La mecánica consiste en principios generales que rigen el comportamiento de
los objetos. En este libro se describen esos principios y se proporcionan ejemplos
que muestran algunas de sus aplicaciones. Aunque es esencial que el estudiante
resuelva problemas similares a esos ejemplos, y se incluyen muchos problemas
de este tipo, el objetivo del texto es ayudar a entender los principios suficientemente bien para aplicarlos a las nuevas situaciones que se presenten. Cada generación de ingenieros se enfrenta a problemas nuevos.
Resolución de problemas
En el estudio de la mecánica usted aprenderá procedimientos para resolver problemas que usará en cursos posteriores y a lo largo de su carrera. Aunque los diferentes tipos de problemas requieren distintos métodos, los siguientes pasos se aplican a muchos de ellos:
• Identifique la información dada y la información, o respuesta, que debe determinarse. Con frecuencia resulta útil reformular el problema en sus propias
palabras. Cuando sea apropiado, asegúrese de que entiende el sistema físico o
el modelo involucrado.
• Desarrolle una estrategia para el problema. Esto es, identifique los principios
y ecuaciones aplicables, y plantéese cómo los usará. Cuando sea posible,
dibuje diagramas para visualizar y resolver el problema.
• Siempre que pueda, trate de predecir la respuesta. Esto desarrollará su intuición y lo ayudará a reconocer una respuesta incorrecta.
• Resuelva las ecuaciones y, cuando sea posible, interprete sus resultados y
compárelos con su predicción. El último paso se llama verificación en la realidad. ¿Es razonable su respuesta?
1.1 Ingeniería y mecánica
Números
Las mediciones, los cálculos y los resultados de ingeniería se expresan en números. Usted necesita saber cómo se expresan los números en los ejemplos y problemas de este libro, y cómo deberá expresar los resultados de sus propios cálculos.
Dígitos significativos Este término se refiere al número de dígitos significativos (o sea, exactos) en un número, contando hacia la derecha a partir del primer
dígito distinto de cero. Los números 7.630 y 0.007630 están expresados con cuatro dígitos significativos. Si se sabe que sólo los primeros cuatro dígitos del número 7,630,000 son exactos, esto se puede indicar escribiendo el número en notación
científica como 7.630 106.
Si un número es el resultado de una medición, los dígitos significativos que
contiene están limitados por la exactitud de la medición. Si el resultado de una
medición es 2.43, esto significa que el valor real estará más cercano a 2.43 que a
2.42 o a 2.44.
Los números pueden redondearse a cierta cantidad de dígitos significativos.
Por ejemplo, el valor de p puede expresarse con tres dígitos significativos, 3.14,
o con seis dígitos significativos, 3.14159. Cuando se usa una calculadora o una
computadora, el número de dígitos significativos está limitado por la cantidad de
cifras significativas que la máquina puede manejar según su diseño.
Uso de números en este libro Los números dados en los problemas deben
tratarse como valores exactos sin importar cuántos dígitos significativos contienen. Si un problema establece que una cantidad es igual a 32.2, se puede suponer
que su valor es 32.200... Por lo general se utilizarán al menos tres dígitos significativos para expresar los resultados intermedios y las respuestas en los ejemplos,
así como las respuestas a los problemas. Si usa calculadora, sus resultados deben
tener esa exactitud. Asegúrese de evitar los errores que ocurren al redondear
resultados intermedios cuando realice una sucesión de cálculos. En vez de esto,
efectúe sus cálculos con la exactitud disponible al retener los valores en su
calculadora.
Espacio y tiempo
El espacio se refiere simplemente al universo tridimensional en que vivimos. Las
experiencias diarias proporcionan una noción intuitiva del espacio y de las ubicaciones, o posiciones, de los puntos en éste. La distancia entre dos puntos en el
espacio es la longitud de la línea recta que los une.
Para medir la distancia entre puntos en el espacio se requiere una unidad de
longitud. Se usarán tanto las unidades del Sistema Internacional, o unidades SI,
como las unidades de uso común en Estados Unidos. En unidades SI, la unidad de
longitud es el metro (m). En unidades de uso común en Estados Unidos la unidad
de longitud es el pie (ft).
Por supuesto, el tiempo resulta familiar; la vida se mide por medio de él. Los
ciclos diarios de luz y oscuridad y las horas, minutos y segundos medidos por un
reloj proporcionan una noción intuitiva del tiempo. Éste se mide mediante los intervalos entre eventos repetidos, como las oscilaciones del péndulo de un reloj o las
vibraciones en un reloj de cristal de cuarzo. Tanto en las unidades SI como en las de
uso común en Estados Unidos, la unidad de tiempo es el segundo (s); también se
utilizan los minutos (min), las horas (h) y los días.
Si la posición de un punto en el espacio en relación con algún punto de referencia cambia con el tiempo, la razón del cambio de su posición se llama velocidad, y la razón del cambio de su velocidad se denomina aceleración. En unidades
SI, la velocidad se expresa en metros por segundo (m/s) y la aceleración en metros
por segundo cuadrado (m/s2). En las unidades de uso común en Estados Unidos, la
5
6
Capítulo 1 Introducción
velocidad se expresa en pies por segundo (pie/s) y la aceleración en pies sobre
segundo cuadrado (pie/s2).
Leyes de Newton
La mecánica elemental se estableció sobre una base sólida con la publicación en
1687 de Philosophiae Naturalis Principia Mathematica de Isaac Newton. Aunque
sumamente original, este trabajo se basó en conceptos fundamentales desarrollados durante una lucha larga y difícil hacia el conocimiento (figura 1.1).
Guerra del Peloponeso
Invasión de Roma a Bretaña
400 a. C.
0
Aristóteles: Estática de palancas, especulaciones sobre dinámica
Arquímedes: Estática de palancas, centros de masa, flotación
Hero de Alejandría: Estática de palancas y poleas
Papo: Definición precisa del centro de masa
d. C. 400
Juan Filopono: Concepto de inercia
Coronación de Carlomagno
800
Conquista normanda de Bretaña
Firma de la Carta Magna
1200
Jordano de Nemora: Estabilidad del equilibrio
Peste bubónica en Europa
1400
Alberto de Sajonia: Velocidad angular
Nicola d’Oresme: Cinemática gráfica, coordenadas
William Heytesbury: Concepto de aceleración
Impresión de la Biblia de Gutenberg
Nicolás Copérnico: Concepto del sistema solar
Dominic de Soto: Cinemática de objetos que caen
Tycho Brahe: Observaciones de movimientos planetarios
Viaje de Colón
Fundación de la colonia de Jamestown
1600
Guerra de los treinta años
Llegada de los peregrinos a Massachussets
Fundación de la Universidad de Harvard
1650
Simon Stevin: Principio del trabajo virtual
Johannes Kepler: Geometría y cinemática de
movimientos planetarios
Galileo Galilei: Experimentos y análisis en estática
y dinámica, movimiento de un proyectil
René Descartes: Coordenadas cartesianas
Evangelista Torricelli: Experimentos sobre hidrodinámica
Blaise Pascal: Análisis en hidrostática
Establecimiento en Carolina
John Wallis, Christopher Wren, Christian Huyghens:
Impactos entre objetos
Cesión de Pennsylvania a William Penn
Juicios por brujería en Salem
1700
Isaac Newton: Concepto de masa, leyes de
movimiento, postulado de la gravitación
universal, análisis de movimientos planetarios
Figura 1.1
Cronología de sucesos fundamentales en el desarrollo de la mecánica hasta la publicación
de Principios de Newton, en relación con otros eventos en la historia.
1.1 Ingeniería y mecánica
Newton estableció tres “leyes” del movimiento que, expresadas en términos
modernos, son:
1. Cuando la suma de las fuerzas que actúan sobre una partícula es igual a cero,
su velocidad es constante. En particular, si inicialmente la partícula se encuentra en reposo, permanecerá en reposo.
2. Cuando la suma de las fuerzas que actúan sobre una partícula no es igual a
cero, la suma de las fuerzas es igual a la razón de cambio de la cantidad de
movimiento lineal de la partícula. Si la masa es constante, la suma de las
fuerzas es igual al producto de la masa de la partícula y su aceleración.
3. Las fuerzas ejercidas por dos partículas entre si son iguales en magnitud y
opuestas en dirección.
Observe que no se definió fuerza ni masa antes de enunciar las leyes de Newton.
La visión moderna es que estos términos se definen mediante la segunda ley. Para
demostrarlo, suponga que se elige un cuerpo arbitrario y se especifica que tiene
masa unitaria. Luego se define una unidad de fuerza como la fuerza que imparte a
esta masa unitaria una aceleración de magnitud unitaria. En principio, es posible
determinar la masa de cualquier cuerpo: se le aplica una fuerza unitaria, se mide
la aceleración resultante y se usa la segunda ley para determinar la masa. También
se puede determinar la magnitud de cualquier fuerza: se le aplica a la masa unitaria, se mide la aceleración resultante y se usa la segunda ley para determinar la
fuerza.
De esta manera, la segunda ley de Newton proporciona significados precisos
a los términos masa y fuerza. En unidades SI, la unidad de masa es el kilogramo
(kg). La unidad de fuerza es el newton (N), que es la fuerza requerida para impartir a una masa de un kilogramo una aceleración de un metro por segundo al cuadrado (m/s2). En las unidades del uso común en Estados Unidos, la unidad de fuerza
es la libra (lb). La unidad de masa es el slug, que es la cantidad de masa acelerada a un pie por segundo cuadrado por una fuerza de una libra.
Aunque los resultados que se analizan en este libro son aplicables a muchos de
los problemas que surgen en la práctica de la ingeniería, hay límites para la validez
de las leyes de Newton. Por ejemplo, éstas no dan resultados precisos si un problema implica velocidades que no son pequeñas comparadas con la velocidad de la luz
(3 108 m/s). La teoría de la relatividad especial de Einstein se aplica a tales problemas. La mecánica elemental también falla en problemas que implican dimensiones que no son grandes comparadas con las dimensiones atómicas. Para describir
los fenómenos en la escala atómica se debe usar la mecánica cuántica.
Sistema internacional de unidades
En unidades SI, la longitud se mide en metros (m) y la masa en kilogramos (kg).
El tiempo se mide en segundos (s), aunque cuando es conveniente también se usan
los minutos (min), las horas (h) y los días. A los metros, kilogramos y segundos se
les llama unidades básicas del SI. La fuerza se mide en newtons (N). Recuerde que
esas unidades están relacionadas por la segunda ley de Newton: un newton es la
fuerza requerida para imprimir a un objeto de un kilogramo de masa una aceleración de un metro por segundo cuadrado:
1 N = 11 kg211 m/s22 = 1 kg-m/s2.
Como el newton se puede expresar en función de las unidades básicas, se le llama
unidad derivada.
Para expresar cantidades por medio de números de tamaño conveniente, los
múltiplos de unidades se indican por medio de prefijos. En la tabla 1.1 se muestran los prefijos más comunes, sus abreviaturas y los múltiplos que representan.
Por ejemplo, 1 km es 1 kilómetro, o sea 1000 m, y 1 Mg es 1 megagramo, que son
106 g o 1000 kg. Con frecuencia se usan los kilonewtons (kN).
Tabla 1.1 Prefijos comunes usados en
las unidades SI y los múltiplos que
representan.
Prefijo
Abreviatura
nanomicromilikilomegagiga-
n
m
m
k
M
G
Múltiplo
10-9
10-6
10-3
103
106
109
7
8
Capítulo 1 Introducción
Unidades de uso común en Estados Unidos
En las unidades de uso común en Estados Unidos, la longitud se mide en pies (pie)
y la fuerza se mide en libras (lb). El tiempo se mide en segundos (s). Éstas son las
unidades básicas de uso común en Estados Unidos. En este sistema de unidades la
masa es una unidad derivada. La unidad de masa es el slug, que es la masa de material acelerado a un pie por segundo cuadrado mediante una fuerza de una libra. La
segunda ley de Newton establece que
1 lb = (1 slug)(1 pie/s2).
A partir de esta expresión se obtiene
1 slug = 1 lb-s2/pie.
En este sistema se usan otras unidades como la milla (1 mi = 5280 pies) y
la pulgada (1 pie = 12 pulg). También se utiliza la kilolibra (kip), que es igual a
1000 lb.
Unidades angulares
s
u
s
u R
R
Figura 1.2
Definición de un ángulo en radianes.
En ambos sistemas de unidades los ángulos se expresan normalmente en radianes
(rad). En la figura 1.2 se muestra el valor de un ángulo u en radianes. Se define
como la razón de la parte de la circunferencia subtendida por u y el radio del círculo. Los ángulos también se expresan en grados. Como hay 360 grados (360°) en
un círculo completo y la totalidad de la circunferencia del círculo es 2pR, 360° son
iguales a 2p rad.
Las ecuaciones que contienen ángulos casi siempre se obtienen suponiendo
que los ángulos se expresan en radianes. Por consiguiente, cuando en una ecuación
se desee sustituir el valor de un ángulo expresado en grados, primero deberá convertirse a radianes. Una excepción notable a esta regla es que muchas calculadoras están diseñadas para aceptar ángulos expresados ya sea en grados o en radianes cuando se utilizan para evaluar funciones como sen u.
Conversión de unidades
Tabla 1.2
Conversión de unidades.
Tiempo 1 minuto
1 hora
1 día
=
=
=
60 segundos
60 minutos
24 horas
Long.
=
=
=
=
12 pulg
5280 pies
25.4 milímetros
0.3048 metros
1 pie
1 milla
1 pulg
1 pie
Ángulo 2p radianes =
360 grados
Masa
1 slug
=
14.59 kilogramos
Fuerza 1 libra
=
4.448 newtons
En la práctica de ingeniería surgen muchas situaciones que requieren convertir
valores expresados en unidades de una clase a valores en otras unidades. Por
ejemplo, si algunos de los datos que deben usarse en una ecuación están dados
en unidades SI y otros en unidades de uso común en Estados Unidos, todos se
deben expresar en términos de un solo sistema de unidades antes de ser sustituidos en la ecuación. La conversión de unidades es sencilla pero debe hacerse con
cuidado.
Suponga que se desea expresar 1 milla por hora (mi/h) en términos de pie por
segundo (pie/s). Como 1 milla es igual a 5280 pies y 1 hora equivale a 3600 segundos, se pueden emplear las expresiones
⎛ 5280 pies ⎞ y ⎛ 1 h ⎞
⎝ 1 mi ⎠
⎝ 3600 s ⎠
como razones cuyos valores son iguales a 1. De esta forma se obtiene
m/h = (1 mi/h) ⎛
11mi/h
⎝
5280 pies ⎞ ⎛ 1 h ⎞
= 1.47 pies/s .
1 mi ⎠ ⎝ 3600 s ⎠
En la tabla 1.2 se proporcionan algunas conversiones útiles entre unidades.
1.1 Ingeniería y mecánica
RESULTADOS
Identifique la información dada y la información
que debe determinarse.
Desarrolle una estrategia; identifique los principios
y ecuaciones aplicables y plantéese cómo los usará.
Siempre que sea posible, trate de predecir la respuesta.
Obtenga la respuesta y, cuando sea posible,
interprétela y compárela con su predicción.
Resolución de problemas:
Estos pasos se aplican
a muchos tipos de problemas.
Unidades SI: Las unidades básicas son el tiempo en
segundos (s), la longitud en metros (m) y la masa
en kilogramos (kg). La unidad de fuerza es el newton (N),
que es la fuerza requerida para acelerar una masa de un
kilogramo a un metro por segundo cuadrado.
Sistemas de unidades.
Unidades de uso común en Estados Unidos: Las unidades
básicas son el tiempo en segundos (s), la longitud en pies
y la fuerza en libras (lb). La unidad de masa el slug, que
es la masa acelerada a un pie por segundo cuadrado
mediante una fuerza de una libra.
s
u
R
Las cantidades equivalentes, como 1 hora = 60 minutos,
pueden escribirse como razones cuyos valores son 1:
1h
1,
60 min
y usarse para realizar la conversión de unidades. Por ejemplo,
15 min 15 min
Definición de un
ángulo en radianes.
s
u R
Conversión de unidades.
1 h 0.25 h.
60 min
Existe un documento muy completo sobre unidades recopilado por Russ Rowlett
de la University of North Carolina en Chapel Hill, el cual está disponible en línea
en www.unc.edu/~rowlett/units.
9
10
Capítulo 1 Introducción
Ejemplo activo 1.1
Conversión de unidades ( Relacionado con el problema 1.11)
Un hombre maneja una bicicleta a una velocidad de 6 metros por segundo (m/s).
¿Qué tan rápido se desplaza en kilómetros por hora (km/h)?
Estrategia
Un kilómetro equivale a 1000 metros y una hora a 60 minutos 60 segundos = 3600
segundos. Estas unidades de conversión pueden utilizarse para determinar su velocidad en km/h.
Solución
Convierta de metros a kilómetros.
Convierta de segundos a horas.
6 m/s 6 m/s
1000 m 1 km
3600 s
1h
21.6 km/h.
Problema de práctica Un hombre maneja una bicicleta a una velocidad de 10 pies por
segundo (pie/s). ¿Qué tan rápido se desplaza en millas por hora (mi/h)?
Respuesta: 6.82 mi/h.
Ejemplo 1.2
Conversión de unidades de presión ( Relacionado con el problema 1.16)
La presión ejercida en un punto del casco del vehículo de sumersión profunda es de
3.00 106 Pa (pascales). Un pascal es 1 newton por metro cuadrado. Determine la
presión en libras por pie cuadrado.
Estrategia
A partir de la tabla 1.2, 1 libra = 4.448 newtons y 1 pie = 0.3048 metros. Con estas
conversiones de unidades es posible calcular la presión en libras por pie cuadrado.
Solución
La presión (con tres dígitos significativos) es
3.00 * 106 N/m2 = 13.00 * 106 N/m22a
1 lb
0.3048 m 2
ba
b
4.448 N
ft
11pie
62,700 lb/pie2
Vehículo de sumersión profunda
Razonamiento crítico
¿Cómo podría haberse obtenido este resultado de una manera más directa? Observe en la tabla para conversión de unidades de la contraportada de este libro que
1 Pa = 0.0209 lb/pie2. Por lo tanto,
⎛ 0.0209 lb/pie 2 ⎞
3.00 × 10 6 N/m 2 = (3.00 × 10 6 N/m 2 ) ⎜
⎟⎠
1 N/m 2
⎝
= 62,7
700 lb/pie 2 .
1.1 Ingeniería y mecánica
Ejemplo 1.3
11
Determinación de unidades a partir de una ecuación ( Relacionado con el problema 1.20)
Suponga que en la ecuación de Einstein
E = mc2,
la masa m está en kilogramos y la velocidad de la luz c en metros por segundo.
a) ¿Cuáles son las unidades SI de E?
b) Si el valor de E en unidades SI es igual a 20, ¿cuál es su valor en las unidades
básicas de uso común en Estados Unidos?
Estrategia
a) Como se conocen las unidades de los términos m y c, es posible deducir las unidades de E a partir de la ecuación dada.
b) Pueden usarse las conversiones de unidades para la masa y la longitud dadas en
la tabla 1.2 para convertir E de unidades SI a unidades de uso común en Estados
Unidos.
Solución
a) De la ecuación para E,
E = 1m kg21c m/s22,
las unidades SI de E son kg-m2/s2.
b) De la tabla 1.2, 1 slug 14.59 kg y 1 pie 0.3048 metros. Por lo tanto,
⎛ 1 slug ⎞ ⎛ 1 pie ⎞ 2
1 kg-m 2/s 2 = (1 kg-m 2/s 2 ) ⎜
⎝ 14.59 kg ⎟⎠ ⎝ 0.3048 m ⎠
= 0.738 slug-pie 2/s2.
El valor de E en unidades de uso común en Estados Unidos es
E = (20)(0.738) = 14.8 slug-pie2/s2.
Razonamiento crítico
En el inciso a), ¿cómo se supo que era posible determinar las unidades de E al
determinar las unidades de mc2? Las dimensiones, o unidades, de cada término en
una ecuación deben ser las mismas. Por ejemplo, en la ecuación a b c, las
dimensiones de cada uno de los términos a, b y c deben ser las mismas. Se dice
que la ecuación es dimensionalmente homogénea. Este requisito se expresa
mediante la frase coloquial. “No se pueden comparar peras con manzanas”.
12
Capítulo 1 Introducción
Problemas
1.1 El valor p es 3.14159265… C es la circunferencia de un círculo y r su radio. Determine el valor de r/C con cuatro dígitos significativos.
1.4 Una portería de fútbol tiene 24 pies de ancho y 8 de alto, por
lo que el área es 24 8 pies 192 pies2. ¿Cuál es el área en m2
con tres dígitos significativos?
r
C
Problema 1.1
1.2 La base de los logaritmos naturales es e = 2.718281828....
a) Exprese e con cinco dígitos significativos.
b) Determine el valor de e2 con cinco dígitos significativos.
c) Use el valor de e obtenido en el inciso a) para determinar el
valor de e2 con cinco dígitos significativos.
[El inciso c) demuestra el peligro de usar valores redondeados durante los cálculos].
Problema 1.4
1.5 El Burj Dubai, que debe estar terminado en 2008, será el edificio más alto del mundo con una altura de 705 m. El área de su base
será de 8000 m2. Convierta su altura y su área de base en unidades
de uso común en Estados Unidos con tres dígitos significativos.
1.3 Un técnico perfora un agujero circular en un panel con un
radio nominal r = 5 mm. El radio real del agujero está en el rango
r = 5 ± 0.01 mm.
a) ¿Hasta cuál número de dígitos significativos puede expresar el
radio?
b) ¿Hasta cuál número de dígitos significativos puede expresar el
área del agujero?
5 mm
Problema 1.3
Problema 1.5
Problemas
1.6 Suponga que acaba de comprar un Ferrari F355 Coupé y
desea saber si puede usar su juego de llaves SAE (unidades de uso
común en Estados Unidos) para trabajar en él. Usted tiene llaves
con anchos v = 1/4 pulg, 1/2 pulg, 3/4 pulg y 1 pulg y el automóvil
tiene tuercas con dimensiones n = 5 mm, 10 mm, 15 mm, 20 mm
y 25 mm. Si se establece que una llave ajusta si v no es 2% mayor
que n, ¿cuál de sus llaves puede usar?
w
13
1.10 El motor del Porsche ejerce un par de torsión de 229 pies-lb
(pies-libra) a 4600 rpm. Determine el valor del par de torsión en
N-m (newton-metros).
n
Problema 1.6
Problema 1.10
1.7 Suponga que se sabe que la altura del Monte Everest está
entre 29,032 pies y 29,034 pies. Con base en esta información, ¿a
cuántos dígitos significativos puede expresarse la altura a) en pies
y b) en metros?
1.8 El tren maglev (levitación magnética) que viaja de Shangai al
aeropuerto en Pundong alcanza una velocidad de 430 km/h. Determine su velocidad a) en mi/h y b) en pie/s.
1.11 La energía cinética del hombre del ejemplo activo 1.1 se
define mediante 21 mv2, donde m es su masa y v es su velocidad.
La masa del hombre es 68 kg y se mueve a 6 m/s, de forma que su
energía cinética es 21 (68 kg)(6 m/s)2 = 1224 kg-m2/s2. ¿Cuál es
su energía cinética en unidades de uso común en Estados Unidos?
1.12 La aceleración debida a la gravedad al nivel del mar en unidades SI es g = 9.81 m/s2. Mediante la conversión de unidades,
use este valor para determinar la aceleración debida a la gravedad
al nivel del mar en unidades de uso común en Estados Unidos.
1.13 Un estadio por quincena es una unidad de velocidad en
broma, inventada tal vez por un estudiante como comentario satírico sobre la gran variedad de unidades con la que deben tratar los
ingenieros. Un estadio equivale a 660 pies (1/8 milla). Una quincena consta de 2 semanas (14 noches). Si usted camina rumbo a
su clase a 2 m/s, ¿cuál es su velocidad en estadios por quincena
con tres dígitos significativos?
1.14 Determine el área de la sección transversal de la viga a) en
m2 y b) en pulg2.
y
Problema 1.8
40 mm
1.9 En los Juegos Olímpicos de Invierno de 2006, la carrera de
ski a campo traviesa de 15 km fue ganada por Andrus Veerpalu de
Estonia en un tiempo de 38 minutos 1.3 segundos. Determine su
velocidad promedio (la distancia viajada entre el tiempo utilizado)
con tres dígitos significativos a) en km/h y b) en mi/h.
120 mm
x
40 mm
40
mm
200 mm
Problema 1.14
14
Capítulo 1 Introducción
1.15 El área de la sección transversal de la viga de acero Canal
Estándar Americano C12 * 30 es A = 8.81 pulg2. ¿Cuál es el área
de su sección transversal en mm2?
y
1.18 En el capítulo 7 se analizan las cargas distribuidas, que se
expresan en unidades de fuerza por unidad de longitud. Si el valor
de una carga distribuida es de 400 N/m, ¿cuál es su valor en
lb/pie?
1.19 El momento de inercia del área rectangular con respecto al
eje x está dado por la ecuación
A
I = 13 bh3.
x
Las dimensiones del área son b = 200 mm y h = 100 mm. Determine el valor de I con cuatro dígitos significativos en términos de
a) mm4, b) m4 y c) pulg4.
y
Problema 1.15
h
x
1.16 Un transductor de presión mide un valor de 300 lb/pulg2.
Determine el valor de la presión en pascales. Un pascal (Pa) es
igual a un newton por metro cuadrado.
1.17 Un caballo de fuerza equivale a 550 pies-lb/s. Un watt es
igual a 1 N-m/s. Determine cuántos watts son generados por los
motores de un jet comercial, si éstos producen 7000 caballos de
fuerza.
b
Problema 1.19
1.20 En el ejemplo 1.3, en vez de la ecuación de Einsten considere la ecuación L = mc, donde la masa m está en kilogramos y
la velocidad de la luz c está en metros por segundo. a) ¿Cuáles
son las unidades SI de L? b) Si el valor de L en unidades SI es 12,
¿cuál es el valor en unidades básicas de uso común en Estados
Unidos?
1.21 La ecuación
s =
Problema 1.17
My
I
se usa en la mecánica de materiales para determinar esfuerzos normales en vigas.
a) Cuando esta ecuación se expresa en términos de unidades básicas SI, M está en newton-metros (N-m), y está en metros (m) e I
está en metros a la cuarta potencia (m4). ¿Cuáles son las unidades
SI de s?
b) Si M 2000 N-m, y 0.1 m e I 7 105 m4, ¿cuál es el
valor de s en unidades básicas de uso común en Estados Unidos?
1.2 Gravitación de Newton
15
1.2 Gravitación de Newton
ANTECEDENTES
Newton postuló que la fuerza gravitatoria entre dos de masas m1 y m2 que están
separadas por la distancia r (figura 1.3) es
F =
Gm1 m 2
r2
,
(1.1)
donde G se denomina constante de gravitación universal. El valor de G en unidades SI es 6.67 10–11 N-m2/kg2. Con base en su postulado, Newton calculó la
fuerza gravitatoria entre una partícula de masa m1 y una esfera homogénea de masa
m2, y encontró que también está dada por la ecuación (1.1), donde r expresa la distancia de la partícula al centro de la esfera. Aunque la Tierra no es una esfera
homogénea, es posible usar este resultado para obtener el peso aproximado de un
cuerpo de masa m debido a la atracción gravitatoria de la Tierra. Se tiene
W =
GmmE
r2
,
(1.2)
donde mE es la masa de la Tierra y r es la distancia del centro de la Tierra al objeto. Observe que el peso de un cuerpo depende de su posición con respecto al centro de la Tierra, mientras que la masa del cuerpo es una medida de la cantidad de
materia que contiene y que no depende de su posición.
Cuando el peso de un objeto es la única fuerza que actúa sobre él, la aceleración resultante se denomina aceleración debida a la gravedad. En este caso la
segunda ley de Newton establece que W ma, y de la ecuación (1.2) se observa
que la aceleración debida a la gravedad es
a =
GmE
r2
.
(1.3)
La aceleración debida a la gravedad al nivel del mar se expresa con g. Si el
radio de la Tierra se representa mediante RE, se observa a partir de la ecuación (1.3)
que GmE = gR2E. Sustituyendo este resultado en la ecuación (1.3), se obtiene una
expresión para la aceleración debida a la gravedad a una distancia r del centro de
la Tierra en función de la aceleración debida a la gravedad al nivel del mar:
a = g
R2E
r2
.
(1.4)
Como el peso del cuerpo es W ma, el peso de un cuerpo a una distancia r
del centro de la Tierra es
W = mg
R2E
r2
.
(1.5)
Al nivel del mar (r RE), el peso de un cuerpo está dado en función de su
masa mediante la simple relación
W = mg.
(1.6)
El valor de g varía de lugar a lugar sobre la superficie de la Tierra. Los valores que se usarán en los ejemplos y problemas son g 9.81 m/s2 en unidades SI
y g 32.2 pies/s2 en unidades de uso común en Estados Unidos.
m1
F
r
F
m2
Figura 1.3
Las fuerzas gravitatorias entre dos partículas
son iguales en magnitud y están dirigidas a lo
largo de la línea que las une.
16
Capítulo 1 Introducción
RESULTADOS
La fuerza gravitatoria entre dos partículas de masas
m1 y m2 que están separadas por la distancia r es
Gm1m2
,
(1.1)
F
r2
donde G es la constante de gravitación universal.
El valor de G en unidades SI es
Gravitación de Newton.
6.67 10 11 N-m2/kg2.
Cuando la Tierra se modela como una esfera
homogénea de radio RE, la aceleración debida a la
gravedad a una distancia r desde el centro es
R2E
,
r2
donde g es la aceleración debida a la gravedad
al nivel del mar.
ag
(1.4)
W mg,
(1.6)
donde m es la masa del objeto y g es la aceleración
debida a la gravedad al nivel del mar.
Ejemplo activo 1.4
Aceleración debida a la
gravedad de la tierra.
Peso de un objeto
al nivel del mar.
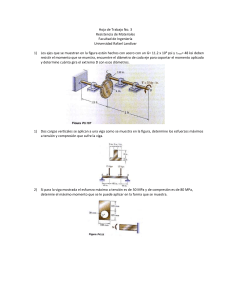
Peso y masa ( Relacionado con el problema 1.22)
La prensa C que se muestra en la figura pesa 14 oz al nivel del mar [16 oz (onzas)
1 lb]. La aceleración debida a la gravedad al nivel del mar es g 32.2 pies/s2. ¿Cuál
es la masa de la prensa C en slugs?
Estrategia
Primero debe determinarse el peso de la prensa C en libras. Después puede usarse
la ecuación (1.6) para determinar la masa en slugs.
Solución
14 oz 14 oz
m
16 oz 0.875 lb.
1 lb
W
0.875 lb
0.0272 slug.
g 32.2 pies/s2
Convierta el peso de
onzas a libras.
Use la ecuación (1.6) para
calcular la masa en slugs.
Problema de práctica La masa de la prensa C es 0.397 kg. La aceleración debi-
da a la gravedad al nivel del mar es g 9.81 m/s2. ¿Cuál es el peso de la prensa C
al nivel del mar en newtons?
Respuesta: 3.89 N.
1.2 Gravitación de Newton
Ejemplo 1.5
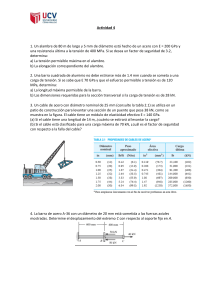
Determinación del peso de un objeto (䉴 Relacionado con el problema 1.27)
Cuando el vehículo exploratorio de Marte (Rover) se ensambló por completo, su
masa fue de 180 kg. La aceleración debida a la gravedad en la superficie de Marte
es 3.68 m/s2 y el radio de Marte es 3390 km.
a) ¿Cuál era el peso del Rover cuando estaba al nivel del mar en la Tierra?
b) ¿Cuál es el peso del Rover sobre la superficie de Marte?
c) La fase de ingreso comenzó cuando la nave espacial alcanzó el punto de interfaz con la atmósfera de Marte a 3522 km desde el centro de Marte. ¿Cuál era el
peso del Rover en ese punto?
Operación de ensamble del vehículo exploratorio de Marte (Rover)
17
18
Capítulo 1 Introducción
Estrategia
El peso del Rover al nivel del mar en la Tierra está dado por la ecuación (1.6) con
g 9.81 m/s2.
El peso sobre la superficie de Marte puede determinarse mediante el uso de la ecuación (1.6), con la aceleración debida a la gravedad igual a 3.68 m/s2.
Para determinar el peso del Rover al inicio de la fase de introducción, se puede escribir una ecuación para Marte equivalente a la ecuación (1.5).
Solución
a) El peso al nivel del mar en la Tierra es
W = mg
= 1180 kg219.81 m/s22
= 1770 N 1397 lb2.
b) Sea gM 3.68 m/s2 la aceleración debida a la gravedad en la superficie de Marte.
Entonces el peso del Rover sobre la superficie de Marte es
W = mgM
= 1180 kg213.68 m/s22
= 662 N 1149 lb2.
c) Sea RM 3390 km el radio de Marte. A partir de la ecuación (1.5), el peso del
Rover cuando éste se encuentra a 3522 km por encima del centro de Marte es
W = mgM
R2M
r2
= 1180 kg213.68 m/s 2
2
= 614 N 1138 lb2.
13,390,000 m22
13,522,000 m22
Razonamiento crítico
En el inciso c), ¿cómo supo que la ecuación 1.5 podía aplicarse a Marte? La ecuación 1.5 se aplica a la Tierra con base en su modelación como una esfera homogénea. La ecuación puede ser aplicada a otros cuerpos celestes bajo el mismo
supuesto. La exactitud de los resultados depende de qué tan poco esférico y no
homogéneo sea el objeto.
Problemas
19
Problemas
1.22 La aceleración debida a la gravedad en la superficie de la
Luna es 1.62 m/s2. a) ¿Cuál sería la masa de la prensa C del ejemplo activo 1.4 sobre la superficie de la Luna? b) ¿Cuál sería el
peso de la prensa C en newtons sobre la superficie de la Luna?
1.23 El cubo de hierro de 1 pie 1 pie 1 pie pesa 490 lb al
nivel del mar. Determine el peso en newtons de un cubo de
1 m 1 m 1 m del mismo material al nivel del mar.
1 pie
1 pie
1.28 Si un objeto está cerca de la superficie de la Tierra, la variación de su peso debida a su distancia desde el centro de la Tierra
frecuentemente se omite. La aceleración debida a la gravedad al
nivel del mar es g 9.81 m/s2. El radio de la Tierra es de 6370
km. El peso de un objeto al nivel del mar es mg, donde m es su
masa. ¿A que altura sobre la superficie terrestre el peso del objeto
se reduce a 0.99mg?
1.29 El planeta Neptuno tiene un diámetro ecuatorial de 49,532 km
y su masa es 1.0247 1026 kg. Si el planeta se modela como una esfera homogénea, ¿cuál es la aceleración debida a la gravedad en su
superficie? (La constante gravitatoria universal es G 6.67 10–11
N-m2/kg2).
1 pie
Problema 1.23
1.24 El área del Océano Pacífico es 64,186,000 millas cuadradas
y tiene una profundidad promedio de 12,925 pies. Suponga que el
peso por unidad de volumen del agua del océano es 64 lb/pie3.
Determine la masa del Océano Pacífico a) en slugs y b) en kilogramos.
1.25 La aceleración debida a la gravedad al nivel del mar es
g 9.81 m/s2. El radio de la Tierra es de 6370 km. La constante
gravitatoria universal es G 6.67 10–11 N-m2/kg2. Use esta información para determinar la masa de la Tierra.
1.26 Una persona pesa 180 lb al nivel del mar. El radio de la Tierra es de 3960 millas. ¿Qué fuerza ejerce la atracción gravitatoria
de la Tierra sobre la persona si ésta se encuentra en una estación
espacial en órbita a 200 millas sobre la superficie de la Tierra?
1.27 La aceleración debida a la gravedad en la superficie de la
Luna es 1.62 m/s2. El radio de la Luna es RM 1738 km (consulte el ejemplo 1.5).
a) ¿Cuál es el peso en Newtons en la superficie de la Luna de un
objeto que tiene una masa de 10 kg?
b) Usando el método descrito en el ejemplo 1.5, determine la fuerza ejercida sobre el objeto por la gravedad de la Luna si éste se
encuentra a 1738 km por encima de la superficie lunar.
Problema 1.29
1.30 En un punto entre la Tierra y la Luna, la magnitud de la
fuerza ejercida sobre un objeto por la gravedad de la Tierra es
igual a la magnitud de la fuerza ejercida sobre el objeto por la
gravedad de la Luna. ¿Cuál es la distancia desde el centro de
la Tierra hasta ese punto, con tres dígitos significativos? La distancia desde el centro de la Tierra hasta el centro de la Luna es
383,000 km, y el radio de la Tierra es 6370 km. El radio de la
Luna es 1738 km, y la aceleración debida a la gravedad en su
superficie es 1.62 m/s2.
CAPÍTULO
2
Vectores
Si un objeto está sometido a varias fuerzas que tienen diferentes
magnitudes y actúan en distintas direcciones, ¿cómo pueden determinarse la magnitud y la dirección de la fuerza total resultante
sobre el objeto? Las fuerzas son vectores y deben sumarse de
acuerdo con la definición de la suma de vectores. En ingeniería
se trata con muchas cantidades que tienen tanto magnitud como
dirección y que pueden expresarse y analizarse como vectores.
En este capítulo se revisan las operaciones con vectores, se expresan los vectores en términos de sus componentes y se presentan ejemplos de aplicaciones de los vectores a la ingeniería.
Los campos de vectores muestran las velocidades y direcciones de un flujo
de gas en tres posiciones verticales. Los vectores se utilizan para describir y
analizar cantidades que tienen magnitud y dirección, incluyendo posiciones,
fuerzas, momentos, velocidades y aceleraciones.
V
22
Capítulo 2 Vectores
2.1 Escalares y vectores
ANTECEDENTES
B
A
(a)
B
B
A
A
rAB
(b)
Figura 2.1
(a) Dos puntos, A y B, de un mecanismo.
(b) Vector rAB de A hacia B.
A
Una cantidad física que puede describirse mediante un número real se denomina
escalar. El tiempo es una cantidad escalar; la masa también lo es. Por ejemplo, se
puede describir la masa de un automóvil al decir que su valor es 1200 kg.
Por otro lado, para describir una cantidad vectorial se debe especificar tanto
un número real no negativo, o magnitud, como una dirección. Dos cantidades vectoriales son iguales sólo si sus magnitudes y direcciones son iguales.
La posición de un punto en el espacio en relación con otro es una cantidad
vectorial. Para describir la localización de una ciudad con respecto a su casa, no es
suficiente decir que está a 100 millas; debe decir que está 100 millas al oeste de su
casa. La fuerza también es una cantidad vectorial: cuando usted empuja un mueble sobre el piso, aplica una fuerza de magnitud suficiente para moverlo en la
dirección deseada.
Los vectores se representarán mediante letras en negritas, U, V, W, ..., y la
magnitud de un vector U se denotará por medio de U. Un vector se representa
gráficamente por medio de una flecha: su dirección indica el sentido del vector y
su longitud se define como proporcional a la magnitud. Por ejemplo, considere los
puntos A y B del mecanismo de la figura 2.1a. La posición del punto B respecto
al punto A puede especificarse mediante el vector rAB de la figura 2.1b. La dirección de rAB indica la dirección del punto A hacia el punto B. Si la distancia entre
los dos puntos es 200 mm, la magnitud rAB 200 mm.
En la figura 2.2, el cable AB ayuda a soportar la torre de transmisión de televisión. La fuerza que ejerce el cable sobre la torre se puede representar por medio
de un vector F, como se muestra en la figura. Si el cable ejerce una fuerza de
800 N sobre la torre, F 800 N (un cable tal mostraría algún pandeo, o curvatura, y la tensión variaría junto con su longitud; por ahora, supondremos que la
curvatura en los cables y cuerdas suspendidas y las variaciones en sus tensiones
pueden ignorarse, supuesto más o menos válido si el peso de la cuerda o el cable
es pequeño en comparación con la tensión. En el capítulo 10 se estudiarán y analizarán los cables y las cuerdas suspendidas con mayor detalle).
Los vectores son un medio conveniente para representar cantidades físicas
que tienen magnitud y dirección, aunque eso es sólo el principio de su utilidad. Así
como los números reales se manipulan con las reglas conocidas para la suma, la
resta, la multiplicación, etcétera, existen reglas para operar con vectores. Esas
reglas proporcionan herramientas poderosas para el análisis en ingeniería.
Suma vectorial
F
B
Figura 2.2
Representación de la fuerza que ejerce el cable
AB sobre la torre, por medio de un vector F.
Cuando un objeto se mueve de un lugar a otro en el espacio, se dice que experimenta un desplazamiento. Si se mueve un libro (o, hablando de manera más
precisa, algún punto de un libro) de un lugar de la mesa a otro, como muestra la
figura 2.3a, es posible representar el desplazamiento mediante el vector U. La
dirección de U indica la dirección del desplazamiento y |U| es la distancia recorrida por el libro.
Suponga que al libro se le da un segundo desplazamiento V, como se muestra en la figura 2.3b. Los desplazamientos U y V equivalen a un solo desplazamiento del libro de su posición inicial a su posición final, que se representa
mediante el vector W en la figura 2.3c. Observe que la posición final del libro
es la misma si primero ocurre el desplazamiento U y después el desplazamiento
V que si primero ocurre el desplazamiento V y luego el desplazamiento U (figura 2.3d). El desplazamiento W se define como la suma de los desplazamientos
U y V:
U V W.
2.1 Escalares y vectores
V
U
U
(a)
(b)
U
V
U
W
Figura 2.3
(a) Desplazamiento representado por el vector U.
(b) El desplazamiento U seguido por el desplazamiento V.
(c) Los desplazamientos U y V son equivalentes al
desplazamiento W.
(d) La posición final del libro no depende del orden
de los desplazamientos.
V
W
V
U
(d)
(c)
V
V
U
U
U
UV
V
(a)
(b)
V
U
UV
V
U
U
UV
V
(d)
23
(e)
(c)
Figura 2.4
(a) Dos vectores, U y V.
(b) La cabeza de U colocada en la cola de V.
(c) Regla del triángulo para obtener la suma de U y V.
(d) La suma es independiente del orden en que se sumen los
vectores.
(e) Regla del paralelogramo para obtener la suma de U y V.
W
La definición de suma vectorial está basada en la suma de desplazamientos.
Considere los vectores U y V de la figura 2.4a. Si se colocan cabeza con cola (figura 2.4b), su suma se define como el vector que va de la cola de U a la cabeza de V
(figura 2.4c). Esto se llama regla del triángulo para la suma vectorial. La figura
2.4d demuestra que la suma es independiente del orden en que los vectores se colocan cabeza con cola. De esta figura se obtiene la regla del paralelogramo para la
suma vectorial (figura 2.4e).
La definición de la suma vectorial implica que
U V V U La suma vectorial es conmutativa.
(2.1)
(U V) W U (V W) La suma vectorial es
(2.2)
V
UVW
U
Figura 2.5
Suma de tres vectores U, V y W.
y
V
asociativa.
para cualesquiera vectores U, V y W. Estos resultados indican que al sumar dos o
más vectores, el orden en que se sumen no importa. La suma puede obtenerse colocando los vectores cabeza con cola en cualquier orden. El vector que va de la cola
del primer vector a la cabeza del último es la suma (figura 2.5a). Si la suma de dos
o más vectores es igual a cero, los vectores forman un polígono cerrado cuando se
colocan cabeza con cola (figura 2.6).
U
W
Figura 2.6
Tres vectores U, V y W cuya suma es igual a
cero.
24
Capítulo 2 Vectores
Una cantidad física se denomina vector si tiene magnitud y dirección y obedece la definición de la suma vectorial. Se sabe que un desplazamiento es un vector. La posición de un punto en el espacio respecto a otro punto también es una
cantidad vectorial. En la figura 2.7, el vector rAC de A a C es la suma de rAB y rBC.
Una fuerza tiene dirección y magnitud pero, ¿obedecen las fuerzas la definición de
la suma vectorial? Por ahora se asumirá que sí. Cuando se estudie la dinámica, se
mostrará que la segunda ley de Newton implica que la fuerza es un vector.
C
rBC
B
rAB
Producto de un escalar y un vector
rAC
A
Figura 2.7
Las flechas que denotan las posiciones
relativas de los puntos son vectores.
El producto de un escalar (número real) a por un vector U es un vector que se
escribe como aU. Su magnitud es aU, donde a es el valor absoluto del escalar
a. La dirección de aU es igual que la de U cuando a es positivo y es opuesta a la
dirección de U cuando a es negativo.
El producto (–1)U se escribe –U y se llama “negativo del vector U”. Tiene la
misma magnitud que U pero dirección opuesta. La división de un vector U entre
un escalar a se define como el producto
U
1
= a bU.
a
a
U
2U
U (1)U
U 1
U
2 2
Figura 2.8
Un vector U y algunos de sus múltiplos escalares.
En la figura 2.8 se muestran un vector U y los productos de U con los escalares
2, –1 y 1/2.
Las definiciones de la suma vectorial y del producto de un escalar y un vector implican que
a1bU2 = 1ab2U,
El producto es asociativo con respecto
a la multiplicación escalar.
1a + b2U = aU + bU,
U
V
Los productos son distributivos con
respecto a la suma escalar.
(2.4)
Los productos son distributivos con
respecto a la suma vectorial.
(2.5)
y
a1U + V2 = aU + aV,
(a)
para cualesquiera escalares a y b y vectores U y V. Estos resultados serán necesarios cuando se estudien las componentes de los vectores.
V
(1)V
Resta vectorial
La diferencia de dos vectores U y V se obtiene sumando U al vector (–1)V:
(b)
U - V = U + 1- 12V.
(1)V
UV
(2.3)
U
(2.6)
Considere los dos vectores U y V que se muestran en la figura 2.9a. El vector
(–1)V tiene la misma magnitud que el vector V pero dirección opuesta (figura
2.9b). En la figura 2.9c se suma el vector U al vector (–1)V para obtener U – V.
Vectores unitarios
(c)
Figura 2.9
(a) Dos vectores U y V.
(b) Vectores V y (–1)V.
(c) La suma de U y (–1)V es la diferencia
vectorial U – V.
Un vector unitario es simplemente un vector cuya magnitud es igual a la unidad. Un
vector unitario especifica una dirección y permite expresar en forma conveniente
un vector que tiene una dirección particular. Si un vector unitario e y un vector U
tienen la misma dirección, se puede escribir U como el producto de su magnitud
U y el vector unitario e (figura 2.10),
U = ƒ U ƒ e.
2.1 Escalares y vectores
Cualquier vector U puede verse como el producto de su magnitud y un vector unitario que tiene la misma dirección de U. Dividiendo ambos lados de esta ecuación
entre U se obtiene
U
ƒUƒ
U
U
= e,
e
1
Ue U
Figura 2.10
Como U y e tienen la misma dirección, el vector U es igual al producto de su magnitud y e.
entonces, al dividir cualquier vector entre su magnitud se obtiene un vector unitario que tiene la misma dirección.
RESULTADOS
Una cantidad física que está completamente descrita por un número real se llama
escalar. Un vector tiene tanto magnitud como dirección y satisface una regla definida para la suma. Un vector se representa gráficamente mediante una flecha cuya
longitud se define como proporcional a la magnitud.
V
U
Suma vectorial
La suma de dos vectores U y V se
define mediante la regla del
triángulo o su equivalente, la regla
del paralelogramo.
UV
Regla del triángulo
U
UV
V
Regla del paralelogramo
Producto de un escalar y un vector
El producto de un escalar a y un vector U se define
como un vector aU con magnitud aU. Su dirección
es la misma que la de U cuando a es positiva y opuesta
a la de U cuando a es negativa. La división de U entre
a se define como el producto (1/a)U.
U
U
Resta vectorial
La diferencia de dos vectores U y V se
define por medio de
U V U (1)V.
U (1)U
2U
V
(1)V
UV
25
U
U
1
U
2
2
26
Capítulo 2 Vectores
Vectores unitarios
Un vector unitario es aquel que tiene una magnitud
de 1. Cualquier vector U puede expresarse como
|U|e, donde e es un vector unitario con la misma
dirección que U. Al dividir un vector U entre su
magnitud se obtiene un vector unitario con la misma
dirección de U.
Ejemplo activo 2.1
U
U
e
1
Ue U
Operaciones vectoriales ( Relacionado con el problema 2.1)
Las magnitudes de los vectores que se muestran son U 8 y V 3. El vector V
es vertical. Determine gráficamente la magnitud del vector U 2V.
U
V
45
Estrategia
Al dibujar los vectores a escala y aplicar la regla del triángulo para la suma, es posible medir la magnitud del vector U 2V.
Solución
Dibuje los vectores U y 2V a escala,
colóquelos cabeza con cola.
6
2V
8
U
45
El valor medido de
U 2V es 13.0.
2V
13.0
U
45
U
V
Problema de práctica Las magnitudes de los vectores que se muestran son U 8 y
V 3. El vector V es vertical. Determine gráficamente la magnitud del vector U – 2V.
45
Respuesta: |U - 2V| = 5.7.
Problemas
27
Suma de Vectores ( Relacionado con el problema 2.2)
Ejemplo 2.2
Una parte del techo en voladizo de un estadio deportivo debe estar soportada por los
cables AB y AC. Las fuerzas que ejercen los cables sobre la pila a la que están unidos se representan con los vectores FAB y FAC. Las magnitudes de las fuerzas son
FAB 100 kN y FAC 60 kN. Determine la magnitud y la dirección de la suma
de las fuerzas ejercidas sobre la pila por los cables.
B
FAB
A
30
30 FAC
C
Estrategia
Al dibujar el paralelogramo, con los vectores a escala, para sumar las dos fuerzas
se puede medir la magnitud y dirección de su suma.
FAB FAC
FAB
100 kN
Solución
Se construye gráficamente el paralelogramo para obtener la suma de las dos fuerzas con las longitudes de FAB y FAC proporcionales a sus magnitudes (figura a). Midiendo la figura, se estima que la magnitud del vector FAB FAC es de 155 kN y su
dirección es de 19° sobre la horizontal.
19
60 kN
FAC
(a) Solución gráfica.
Razonamiento crítico
En las aplicaciones de ingeniería, las operaciones con vectores casi siempre se
hacen de manera analítica. Entonces, ¿por qué es importante adquirir experiencia
con los métodos gráficos? Al hacerlo se mejora la intuición acerca de los vectores
y ayuda a entender las operaciones vectoriales. Asimismo, el bosquejo de una solución gráfica puede ayudar frecuentemente a formular una solución analítica.
Problemas
2.1 En el ejemplo activo 2.1, suponga que los vectores U y V
se reorientan como lo muestra la figura. El vector V es vertical.
Las magnitudes son U 8 y V 3. Determine en forma gráfica la magnitud del vector U 2V.
45
U
Problema 2.1
V
2.2 Suponga que la pila del ejemplo 2.2 se coloca más cerca
del estadio de manera que el ángulo entre las fuerzas FAB y FAC
es de 50°. Dibuje un bosquejo de la nueva situación. Las magnitudes de las fuerzas son FAB 100 kN y FAC 60 kN. Determine
gráficamente la magnitud y la dirección de la suma de las fuerzas
ejercidas por los cables sobre la pila.
28
Capítulo 2 Vectores
Al resolver los problemas 2.3 a 2.5 consulte el siguiente
diagrama. Los vectores de fuerza FA, FB y FC pertenecen
al mismo plano.
2.7 Los vectores FA y FB representan las fuerzas ejercidas
por la banda sobre la polea. Sus magnitudes son FA 80 N y
FB 60 N. Determine gráficamente la magnitud de la fuerza
total que ejerce la banda sobre la polea.
FB
FC
FB
a
45
FA
FA
10
Problema 2.7
Problemas 2.3–2.5
2.3 La magnitud FA 80 lb y el ángulo a 65°. La magnitud FA FB 120 lb. Determine gráficamente la magnitud
de FB.
2.4 Las magnitudes FA 40 N, FB 50 N y FC 40 N. Los
ángulos a 50° y b 80°. Determine gráficamente la magnitud
de FA FB FC.
2.5 Las magnitudes FA FB FC 100 lb, y el ángulo
a 30°. Determine gráficamente el valor del ángulo b para el
cual la magnitud FA FB FC es mínima y el valor mínimo de
FA FB FC.
2.8 La suma de las fuerzas FA FB FC 0. La magnitud
FA 100 N y el ángulo a 60°. Determine gráficamente las
magnitudes FB y FC.
2.9 La suma de las fuerzas FA FB FC 0. Las magnitudes
FA 100 N y FB 80 N. Determine gráficamente la magnitud FC y el ángulo a.
FB
30
2.6 El ángulo u 50°. Determine gráficamente la magnitud del
vector rAC.
FC
150 mm
60 mm
FA
a
Problemas 2.8/2.9
B
rAB
A
rBC
rAC
C
Problema 2.6
29
Problemas
2.10 Las fuerzas que actúan sobre el planeador están representadas por tres vectores. El empuje L y el arrastre D son perpendiculares. La magnitud del peso W es de 500 lb. La suma de las
fuerzas W L D 0. Determine gráficamente las magnitudes
del empuje y el arrastre.
2.12 La cuerda ABC ejerce fuerzas FBA y FBC de igual magnitud
sobre la polea en B. La magnitud de la fuerza total ejercida sobre
la polea por las dos fuerzas es de 200 lb. Determine gráficamente
FBA.
FBC
C
B
B
FBA
A
L
Problema 2.12
25
2.13 Dos tractores para nieve remolcan un refugio de emergencia
hacia una nueva ubicación en la base McMurdo de la Antártica (se
muestra una vista aérea; los cables son horizontales). La fuerza
total FA FB ejercida sobre la unidad tiene una dirección paralela
a la línea L, y su magnitud es de 400 lb. Determine gráficamente
las magnitudes de FA y FB.
D
W
L
Problema 2.10
FB
FA
2.11 Un tanque de almacenamiento esférico está soportado
por cables. El tanque está sometido a tres fuerzas: las fuerzas FA y
FB ejercidas por los cables y el peso W. El peso del tanque es
W 600 lb. La suma vectorial de las fuerzas que actúan sobre
el tanque es igual a cero. Determine gráficamente las magnitudes
de FA y FB.
FA
FB
20
40
20
Vista Superior
Problema 2.13
2.14 Un topógrafo determina que la distancia horizontal del
punto A al punto B de la figura es de 400 m y que la distancia
horizontal de A a C es de 600 m. Determine gráficamente la
magnitud del vector rBC y el ángulo a.
Norte
B
a
rBC
OXÍGE
ID
QU
NO LÍ
C
O
W
60
20
Este
A
Problema 2.11
Problema 2.14
30
Capítulo 2 Vectores
2.15 El vector r se extiende desde el punto A de la figura hasta el
punto medio entre los puntos B y C. Demuestre que
1
2 1rAB
r =
2.16 Por medio de un bosquejo de los vectores, explique por qué
+ rAC2.
U + 1V + W2 = 1U + V2 + W.
C
rAC
r
rAB
B
A
Problema 2.15
2.2 Componentes en dos dimensiones
ANTECEDENTES
Es más fácil trabajar con vectores cuando se pueden expresar en términos de componentes vectoriales perpendiculares. Aquí se explicará cómo descomponer vectores en componentes cartesianas y se darán ejemplos de manipulaciones de vectores
usando componentes.
Considere el vector U de la figura 2.11a. Al colocar un sistema coordenado
cartesiano de modo que el vector U sea paralelo al plano x-y, es posible escribirlo
como la suma de los componentes vectoriales perpendiculares Ux y Uy que son
paralelas a los ejes x e y (figura 2.11b):
U
(a)
y
U = Ux + Uy.
U
Uy
Ux
(b)
x
U = Ux i + U y j.
y
U
U y Uy j
Ux Uxi
j
i
Luego, si se introduce un vector unitario i que señale en la dirección positiva del
eje x y un vector unitario j que señale en la dirección positiva del eje y (figura
2.11c), se puede expresar el vector U en la forma
x
(c)
Figura 2.11
(a) Vector U.
(b) Componentes vectoriales Ux y Uy.
(c) Las componentes vectoriales se pueden
expresar en función de i y j.
(2.7)
Los escalares Ux y Uy se llaman componentes escalares de U. Cuando se nombran
simplemente las componentes de un vector, se hace referencia a las componentes
escalares. Se llamará a Ux y Uy las componentes x e y de U.
Las componentes de un vector especifican tanto sus direcciones relativas al
sistema coordenado cartesiano como sus magnitudes. En el triángulo rectángulo
formado por el vector U y sus componentes vectoriales (figura 2.11c), se observa
que la magnitud de U está dada en términos de sus componentes por el teorema de
Pitágoras:
ƒ U ƒ = 2U2x + U2y .
(2.8)
Con esta ecuación se podrá determinar la magnitud de un vector cuando se conozcan sus componentes.
Manipulación de vectores en términos de sus componentes
La suma de dos vectores U y V en términos de sus componentes es
U + V = 1Ux i + Uy j2 + 1Vx i + Vy j2
= 1Ux + Vx2i + 1Uy + Vy2j.
(2.9)
2.2 Componentes en dos dimensiones
y
UV
31
y
Vy j
UV
V
Uy j
U
(Uy Vy)j
Vx i
Ux i
(a)
UV
x
(Ux Vx)i
(b)
x
(c)
Figura 2.12
(a) Suma de U y V. (b) Componentes vectoriales de U y V. (c) La suma de las componentes
en cada dirección coordenada es igual a la componente de U V en esa dirección.
Las componentes de U V son las sumas de las componentes de los vectores U y V.
Observe que para obtener este resultado se usaron las ecuaciones (2.2), (2.4) y (2.5).
Es instructivo derivar gráficamente la ecuación (2.9). La suma de U y V se
muestra en la figura 2.12a. En la figura 2.12b se introduce un sistema coordenado
y se muestran las componentes de U y V. En la figura 2.12c se suman las componentes x e y y se obtuvo la ecuación (2.9).
El producto de un número a y un vector U en términos de las componentes de
U es
y
B
(xB, yB)
rAB
A
(xA, yA)
x
aU a(Uxi Uy j) aUxi aUy j.
(a)
La componente de aU en cada dirección coordenada es igual al producto de a
y la componente de U en esa dirección. Se usaron las ecuaciones (2.3) y (2.5) para
obtener este resultado.
y
B
yB
Vectores de posición en términos de sus componentes
El vector de posición de un punto relativo a otro punto se puede expresar en términos de las coordenadas cartesianas de ambos puntos. Considere el punto A con
coordenadas (xA, yA) y el punto B con coordenadas (xB, yB). Sea rAB el vector que
especifica la posición de B en relación con A (figura 2.13a). Esto es, mediante rAB
se denota el vector que va de un punto A a otro punto B. Se observa en la figura
2.13b que rAB está dado en términos de las coordenadas de los puntos A y B por
rAB (xB – xA)i (yB – yA)j.
(2.10)
Observe que la componente x del vector de posición que va del punto A al punto
B se obtiene restando la coordenada x de A de la coordenada x de B, y la componente y se obtiene restando la coordenada y de A de la coordenada y de B.
rAB
yA
(yB yA)j
A
(xB xA)i
xA
(b)
xB
x
Figura 2.13
(a) Puntos A y B, y el vector posición rAB de A
a B.
(b) Las componentes de rAB se pueden determinar a partir de las coordenadas de los puntos A y B.
RESULTADOS
Un vector U que es paralelo al plano x–y puede expresarse como
U Uxi Uy j,
(2.7)
y
donde i es un vector unitario que apunta en la dirección positiva
del eje x y j es un vector unitario que apunta en la dirección
positiva del eje y.
U
La magnitud de U está dada por
x
U U2x U2y.
(2.8)
32
Capítulo 2 Vectores
Manipulación de vectores en términos de sus componentes
U V (Uxi Uy j) (Vxi Vyj)
La suma (o resta) vectorial y la
multiplicación de un vector por
un número puede realizarse en
términos de sus componentes.
(Ux Vx)i (Uy Vy)j,
(2.9)
aU a(Uxi Uy j)
aUxi aUy j.
Vectores de posición en términos de sus componentes
y
rAB
B
(xB, yB)
El vector de posición de A a B está dado por
rAB (xB xA)i (yB yA)j.
(2.10)
A
(xA, yA)
x
Determinación de componentes ( Relacionado con el problema 2.31)
Ejemplo activo 2.3
El cable entre los puntos A y B ejerce una fuerza de 900 N sobre la parte superior
de la torre de televisión que se muestra en la figura, la fuerza está representada por
el vector F. Exprese F en términos de sus componentes usando el sistema coordenado que se indica.
A
Estrategia
Se determinarán las componentes del vector F de dos maneras distintas. En el primer método se encontrará el ángulo entre F y el eje y, y después se usará trigonometría para determinar las componentes. En el segundo método se usará la pendiente
dada para el cable AB y se aplicarán triángulos semejantes para determinar las componentes de F.
80 m
40 m
B
Solución
y
Primer método
A
80 m
Fuerza
ejecida
sobre la
torre por
el cable
AB
F
y
A
Determine el ángulo entre F
y el eje y:
40
a arctan
26.6.
80
B
a
80 m
F
x
40 m
B
40 m
x
2.2 Componentes en dos dimensiones
y
A
Use trigonometría para determinar F en
términos de sus componentes:
a
F Fsen ai Fcos aj
900 sen 26.6 i 900 cos 26.6 j (N)
F
402i 805j (N).
B
x
Segundo método
y
A
Usando las dimensiones dadas calcule
la distancia desde A hasta B:
80 m
(40 m) (80 m) 89.4 m.
2
2
B
x
40 m
y
Use triángulos semejantes para
determinar las componentes de F:
Fy
Fx
80 m
40 m
y
,
F
F
89.4 m
89.4 m
entonces
80
40
(900 N)i (900 N)j
F
89.4
89.4
402i 805j (N).
F
Fy
89.4 m
80 m
Fx
x
40 m
Problema de práctica El cable que va del punto A al punto B ejerce una fuerza de
900 N sobre la parte superior de una torre de televisión; la fuerza se representa mediante el vector F. Suponga que se puede cambiar la colocación del punto B de manera que
la magnitud de la componente y de F sea tres veces la magnitud de la componente x de
F. Exprese F en términos de sus componentes. ¿Qué tan lejos del origen del sistema coordenado debería colocarse B a lo largo del eje x?
Respuesta: F = 285i - 854j (N). Coloque el punto B a 26.7 m del origen.
33
34
Capítulo 2 Vectores
Ejemplo 2.4
Determinación de componentes en términos del ángulo ( Problema relacionado 2.33)
Muchos dispositivos mecánicos utilizan cilindros hidráulicos para ejercer fuerzas.
La fuerza se ejerce mediante un líquido a presión (fluido hidráulico) que empuja un
émbolo contra un pistón dentro del cilindro. El cilindro hidráulico AB de la figura ejerce una fuerza F de 4000 lb sobre la caja del camión de volteo en B. Exprese
F en términos de componentes usando el sistema coordenado que se muestra.
y
B
B
30
F
A
30
A
x
Estrategia
Cuando la dirección de un vector se especifica por medio de un ángulo, como en este
ejemplo, es posible determinar los valores de las componentes con ayuda del triángulo rectángulo formado por el vector y sus componentes.
Solución
La figura a muestra el vector F y sus componentes vectoriales. En el triángulo rectángulo resultante se observa que la magnitud de Fx es
y
ƒ Fx ƒ = ƒ F ƒ cos 30° = 14000 lb2cos 30° = 3460 lb.
Fx
Fy
30
Fx apunta en la dirección x negativa, por lo que
Fx = - 3460i 1lb2.
F
x
(a) La fuerza F y sus componentes
forman un triángulo rectángulo.
La magnitud de Fy es
Fy F sen 30° (4000 lb) sen 30° 2000 lb.
La componente vectorial Fy apunta en la dirección y positiva, por lo que
Fy = 2000j 1lb2.
El vector F, en términos de sus componentes, es
F = Fx + Fy = - 3460i + 2000j 1lb2.
La componente x de F es –3460 lb y la componente y es 2000 lb.
Razonamiento crítico
Cuando se han determinado las componentes de un vector dado se debe verificar
que los resultados sean razonables. En este ejemplo se puede observar, a partir de
la dirección del vector, que la componente x debería ser negativa y la componente y positiva. También se puede verificar que las componentes tengan la magnitud
correcta. En este ejemplo,
ƒ F ƒ = 21 -3460 lb22 + 12000 lb22 = 4000 lb.
2.2 Componentes en dos dimensiones
Ejemplo 2.5
Determinación de una magnitud vectorial desconocida ( Relacionado con el
problema 2.47)
Los cables A y B de la figura ejercen fuerzas FA y FB sobre el gancho. La magnitud
de FA es de 100 lb. La tensión en el cable B se ha ajustado para que la fuerza total
FA FB sea perpendicular a la pared a la que está unido el gancho.
a) ¿Cuál es la magnitud de FB?
b) ¿Cuál es la magnitud de la fuerza total ejercida por los dos cables sobre el gancho?
A
40
Estrategia
La suma vectorial de las dos fuerzas es perpendicular a la pared, por lo que la suma
de las componentes paralelas a la pared es igual a cero. A partir de esta condición
puede obtenerse una ecuación para la magnitud de FB.
20
Solución
B
a) En términos del sistema coordenado de la figura a, las componentes de FA y
FB son
FA = ƒ FA ƒ sen
sin 40°i + ƒ FA ƒ cos 40°j,
FB = ƒ FB ƒ sen
sin 20°i - ƒ FB ƒ cos 20°j.
FA
40
La fuerza total es
FA + FB = 1 ƒ FA ƒ sen
sin 40° + ƒ FB ƒ sen
sin 20°2i
+ 1 ƒ FA ƒ cos 40° - ƒ FB ƒ cos 20°2j.
Ahora, la componente de la fuerza total paralela a la pared (la componente y), se iguala a cero
20
FB
ƒ FA ƒ cos 40° - ƒ FB ƒ cos 20° = 0,
así se obtiene una ecuación para la magnitud de FB:
ƒ FB ƒ =
ƒ FA ƒ cos 40°
cos 20°
=
1100 lb2cos 40°
cos 20°
= 81.5 lb.
b) Como ahora se conoce la magnitud de FB, es posible determinar la fuerza total
que actúa sobre el gancho:
FA + FB = 1 ƒ FA ƒ sen
sin 40° + ƒ FB ƒ sen
sin 20°2i
sen 40° + 181.5 lb2sin
sen 20°]i = 92.2i 1lb2.
= [1100 lb2sin
y
La magnitud de la fuerza total es de 92.2 lb.
FA
40
Pensamiento crítico
La solución del inciso a) se puede obtener de una manera menos formal. En la figura a se observa que, si la componente de la fuerza total paralela a la pared es cero,
la magnitud de la componente vertical de FA debe ser igual a la magnitud de la componente vertical de FB:
ƒ FA ƒ cos 40° = ƒ FB ƒ cos 20°.
Por lo tanto, la magnitud de FB es
ƒ FB ƒ =
ƒ FA ƒ cos 40°
cos 20°
=
1100 lb2 cos 40°
cos 20°
x
20
= 81.5 lb.
FB
a) Resolución de FA y FB en
componentes paralelas y perpendiculares a la pared.
35
36
Capítulo 2 Vectores
Problemas
2.17 Una fuerza F 40i – 20j (N). ¿Cuál es la magnitud F?
Estrategia: La magnitud de un vector en términos de sus
componentes está dada por la ecuación (2.8).
2.18 En la estimación de las componentes de una fuerza
F Fx i Fy j que actúa sobre el empotramiento de un puente,
un ingeniero ha determinado que Fx 130 MN, F 165 MN,
y Fy es negativa. ¿Cuál es el valor de Fy?
2.19 Un soporte está sometido a una fuerza F Fxi 80j (N).
Si el soporte resiste con seguridad una fuerza de 100 N, ¿cuál es el
intervalo permisible para la componente Fx?
2.24 Un hombre ejerce una fuerza F de 60 lb para meter un cajón
en un camión. a) Exprese F en términos de sus componentes usando el sistema coordenado que se muestra en la figura. b) El peso
del cajón es de 100 lb. Determine la magnitud de la suma de las
fuerzas ejercidas por el hombre y el peso del cajón.
y
F
20
2.20 Si FA 600i 800j (kip) y FB 200i – 200j (kip), ¿cuál es
la magnitud de la fuerza F FA – 2FB?
x
2.21 Las fuerzas que actúan sobre el planeador de la figura son
su peso W –500j (lb), el arrastre D –200i 100j (lb), y el
empuje L. La suma de las fuerzas W L D 0. Determine
las componentes y la magnitud de L.
y
Problema 2.24
2.25 El motor de un misil ejerce una fuerza F de 260 kN. a) Exprese F en términos de sus componentes usando el sistema coordenado que se muestra en la figura. b) La masa del misil es de
8800 kg. Determine la magnitud de la suma de las fuerzas ejercidas por el motor y el peso del misil.
L
y
F
D
3
4
W
x
x
Problema 2.21
Problema 2.25
2.22 Dos vectores perpendiculares U y V se encuentran en el
plano x-y. El vector U 6i 8j y V 20. ¿Cuáles son las componentes escalares de V?
2.23 Un pez ejerce una fuerza de 10 lb sobre la línea representada por el vector F. Exprese F en términos de sus componentes
usando el sistema coordenado que se muestra en la figura.
2.26 Para la armadura que se muestra en la figura, exprese el
vector de posición rAD, del punto A al punto D, en términos de sus
componentes. Use su resultado para determinar la distancia que
hay desde el punto A hasta el punto D.
y
B
y
A
0.6 m
7
11
F
D
0.7 m
0.4 m
C
x
Problema 2.23
0.6 m
x
1.2 m
Problema 2.26
Problemas
2.27 Los puntos A, B, ..., son las juntas del elemento estructural
hexagonal. Sea rAB el vector de posición de la junta A a la junta B,
rAC el vector de posición de la junta A a la junta C, etcétera. Determine las componentes de los vectores rAC y rAF.
2.28 Determine las componentes del vector rAB – rBC.
y
E
D
37
2.31 En el ejemplo activo 2.3, el cable AB ejerce una fuerza
de 900 N sobre la parte superior de la torre. Suponga que la unión
en el punto B se mueve alejándolo más de la torre en dirección
horizontal, y suponga que la magnitud de la fuerza F que el cable
ejerce sobre la parte superior de la torre es proporcional a la longitud del cable. a) ¿Cuál es la distancia desde la torre hasta el punto
B si la magnitud de la fuerza es 1000 N? b) Exprese la fuerza F de
1000 N en términos de sus componentes usando el sistema coordenado que se muestra.
2.32 Determine el vector de posición rAB en términos de sus
componentes si a) u 30° y b) u 225°.
2m
y
F
C
150 mm
60 mm
x
B
A
rAB B
Problemas 2.27/2.28
2.29 Las coordenadas del punto A son (1.8, 3.0) pie. La coordenada y del punto B es 0.6 pie. El vector rAB tiene la misma dirección que el vector unitario eAB 0.616i – 0.788j. ¿Cuáles son las
componentes de rAB?
rBC
A
x
C
y
Problema 2.32
A
2.33 En el ejemplo 2.4, las coordenadas del punto fijo A son
(17, 1) pie. El conductor baja la caja del camión a una nueva posición en la que las coordenadas del punto B son (9, 3) pies. La
magnitud de la fuerza F ejercida sobre la caja por el cilindro hidráulico cuando la caja está en la nueva posición es de 4800 lb.
Haga un bosquejo de la nueva situación. Exprese F en términos de
sus componentes.
rAB
B
x
Problema 2.29
2.30 Exprese el vector de posición del punto A al punto B de la máquina que se muestra en la figura en términos de sus componentes.
b) Exprese el vector de posición del punto B al punto C en términos
de sus componentes.
c) Use los resultados de los incisos a) y b) para determinar la distancia del punto A al punto C.
2.34 Un topógrafo mide la posición del punto A y determina que
rOA 400i 800j (m). El topógrafo desea determinar la posición
de un punto B de manera que 兩rAB兩 400 m y 兩rOA rAB兩 1200 m.
¿Cuáles son las coordenadas cartesianas del punto B?
y
B
A
N
rAB
y
98 pulg
45
pulg
rOA
Camino
propuesto
C
A
55 pulg
35 pulg
B
50 pulg
x
50
pulg
Problema 2.30
x
O
Problema 2.34
38
Capítulo 2 Vectores
2.35 La magnitud del vector de posición rBA del punto B al
punto A es de 6 m y la magnitud del vector de posición rCA
del punto C al punto A es de 4 m. ¿Cuáles son las componentes
de rBA?
2.38 La longitud de la barra AB es 0.6 m. Determine las componentes de un vector unitario eAB que apunte desde el punto A hacia
el punto B.
y
2.36 En el problema 2.35 determine las componentes de
un vector unitario eCA que apunta desde el punto C hacia el
punto A.
Estrategia: Determine las componentes de rCA y después divida el vector rCA entre su magnitud.
y
0.4 m
A
3m
B
B
0.3 m
x
C
x
Problema 2.38
A
Problemas 2.35/2.36
2.37 Se muestran las coordenadas x e y de los puntos A, B y C
del velero.
a) Determine las componentes de un vector unitario que sea paralelo al cable AB y que apunte de A a B.
b) Determine las componentes de un vector unitario que sea paralelo al cable BC y que apunte de C a B.
2.39 Determine las componentes de un vector unitario que
sea paralelo al actuador hidráulico BC y que apunte desde B
hacia C.
2.40 El actuador hidráulico BC ejerce una fuerza F de 1.2 kN
sobre la junta en C, la fuerza es paralela al actuador y apunta
desde B hacia C. Determine las componentes de F.
y
1m
D
y
C
B (4, 13) m
1m
0.6 m
B
A
0.15 m
x
0.6 m
Pala
Problemas 2.39/2.40
C
(9, 1) m
A
(0, 1.2) m
Problema 2.37
x
Problemas
39
2.41 Un topógrafo determina que la longitud de la línea OA es de 1500 m y que la longitud de la línea OB es de 2000 m.
a) Determine las componentes del vector de posición desde el punto A hasta el punto B.
b) Determine las componentes del vector unitario que apunta desde A hacia B.
y
N
A Puente propuesto
B
60
30
Río
x
O
Problema 2.41
2.42 Las magnitudes de las fuerzas ejercidas por los cables son 兩T1兩 2800 lb, 兩T2兩 3200 lb, 兩T3兩 4000 lb y 兩T4兩 5000 lb. ¿Cuál
es la magnitud de la fuerza total ejercida por los cuatro cables?
2.43 Las tensiones en los cuatro cables son iguales: 兩T1兩 兩T2兩 兩T3兩 兩T4兩 T. Determine el valor de T tal que los cuatro cables
ejerzan una fuerza total de 12,500 lb de magnitud sobre el soporte.
y
T4
51
T3
40
T2
29
T1
9
x
Problemas 2.42/2.43
40
Capítulo 2 Vectores
2.44 La cuerda ABC ejerce las fuerzas FBA y FBC sobre la polea
en B que se muestra en la figura. Sus magnitudes son iguales:
FBA FBC. La magnitud de la fuerza total ejercida sobre la
polea en B por la cuerda es FBA FBC 920 N. Determine
FBA expresando las fuerzas FBA y FBC en términos de sus componentes.
2.46 Cuatro grupos se enfrentan en una competencia de jalar la
cuerda. Las magnitudes de las fuerzas ejercidas por los grupos B,
C y D son FB 800 lb, FC 1000 lb, y FD 900 lb. Si la
suma vectorial de las cuatro fuerzas es igual a cero, ¿cuál es
la magnitud de FA y el ángulo a?
y
FB
FC
FBC
C
20
70
30
B
B
20
a
FD
FBA
FA
A
x
Problema 2.46
Problema 2.44
2.45 La magnitud de la fuerza horizontal F1 es de 5 kN y
F1 F2 F3 0. ¿Cuáles son las magnitudes de F2 y F3?
y
2.47 En el ejemplo 2.5, suponga que el punto de unión del
cable A se mueve de tal forma que el ángulo entre el cable y la
pared se incrementa de 40° a 55°. Haga un bosquejo que muestre
las fuerzas ejercidas por los dos cables sobre el gancho. Si se
desea que la fuerza total FA FB tenga una magnitud de 200 lb y
que su dirección sea perpendicular a la pared, ¿cuáles son las
magnitudes necesarias de FA y FB?
2.48 La ménsula de la figura debe soportar las dos fuerzas que
se muestran, donde F1 F2 2 kN. Un ingeniero determina
que la ménsula soportará de manera segura una fuerza total con
una magnitud de 3.5 kN en cualquier dirección. Suponga que
0 a 90°. ¿Cuál es el intervalo seguro del ángulo ?
F3
30
F1
F2
a
45
F1
F2
x
Problema 2.45
Problema 2.48
Problemas
2.49 En la figura se muestran tres fuerzas que actúan sobre
una junta de una estructura. La magnitud de FC es de 60 kN, y
FA FB FC 0. ¿Cuáles son las magnitudes de FA y FB?
41
2.52 El peso total de un hombre y su paracaídas es W 230 lb.
La fuerza D de arrastre es perpendicular a la fuerza L de elevación. Si la suma vectorial de las tres fuerzas es igual a cero, ¿cuáles son las magnitudes de L y D?
y
y
L
FC
FB
5
15
2
x
40
D
FA
Problema 2.49
2.50 Cuatro fuerzas coplanares actúan sobre una viga. Las fuerzas FB y FC son verticales. La suma vectorial de las fuerzas es igual
a cero. Las magnitudes FB 10 kN y FC 5 kN. Determine las
magnitudes de FA y FD.
x
W
FD
30°
Problema 2.52
FA
FB
FC
Problema 2.50
2.53 En la figura se muestran las tres fuerzas que actúan sobre el
automóvil. La fuerza T es paralela al eje x y la magnitud de la
fuerza W es 14 kN. Si T W N 0, ¿cuáles son las magnitudes de las fuerzas T y N?
2.51 Seis fuerzas actúan sobre una viga que forma parte de la
estructura de un edificio. La suma vectorial de las fuerzas es
igual a cero. Las magnitudes FB FE 20 kN, FC 16 kN y
FD 9 kN. Determine las magnitudes de FA y FG.
20
y
FA
70
FC
FD
40
T
FG
50
40
W
FB
Problema 2.51
FE
20
N
Problema 2.53
x
42
Capítulo 2 Vectores
2.54 Los cables A, B y C ayudan a soportar una columna de una
estructura. Las magnitudes de las fuerzas ejercidas por los cables
son iguales: 兩FA兩 兩FB兩 兩FC兩. La magnitud de la suma vectorial
de las tres fuerzas es de 200 kN. ¿Qué valor tiene 兩FA兩?
2.56 La estructura que se muestra en la figura forma parte de
una armadura que soporta el techo de una sala de conciertos. Los
elementos AB, AC y AD ejercen fuerzas FAB, FAC y FAD sobre la
junta A. La magnitud 兩FAB兩 4 kN. Si la suma vectorial de las
tres fuerzas es igual a cero, ¿cuáles son las magnitudes de FAC
y FAD?
y
FC
FA
FB
B
(4, 1) m
FAB
FAC
6m
A
B
C
C
FAD
(4, 2) m
x
A
D
4m
4m
(2, 3) m
4m
Problema 2.56
Problema 2.54
2.55 La fuerza total ejercida en el punto superior B del mástil
por los cables AB y BC del velero es 180i – 820j (N). ¿Cuáles
son las magnitudes de las fuerzas ejercidas en B por los cables
AB y BC?
2.57 La distancia s 45 pulg.
a) Determine el vector unitario eBA que apunta desde B hacia A.
b) Use el vector unitario que obtuvo en a) para determinar las
coordenadas del collarín C.
2.58 Determine las coordenadas x e y del collarín C como funciones de la distancia s.
y
B (4, 13) m
y
A
(14, 45) pulg
C
s
B
(75, 12) pulg
x
C
(9, 1) m
A
(0, 1.2) m
Problema 2.55
x
Problemas 2.57/2.58
2.3 Componentes en tres dimensiones
2.60 Sea r el vector de posición que va del punto C de la figura
al punto localizado a una distancia de s metros del punto A, sobre
la línea recta que conecta A con B. Exprese r en términos de sus
componentes (su solución estará en términos de s).
2.59 El vector de posición r va del punto A a un punto sobre la
línea recta entre B y C, como se muestra en la figura. Su magnitud
es r 6 pies. Exprese r en términos de sus componentes.
y
y
B
B
(7, 9) pies
(10, 9) m
r
s
r
A (3, 5) pies
C
A (3, 4) m
(12, 3) pies
C (9, 3) m
x
x
Problema 2.59
Problema 2.60
2.3 Componentes en tres dimensiones
ANTECEDENTES
En ingeniería muchas aplicaciones requieren que los vectores se expresen en términos de sus componentes en un sistema coordenado tridimensional. En esta
sección se explicará la técnica para hacer esto y se mostrará cómo realizar operaciones con vectores en tres dimensiones.
Primero se repasará cómo dibujar objetos en tres dimensiones. Considere un
cuerpo tridimensional, por ejemplo un cubo. Si se dibuja el cubo como se ve cuando el punto de vista es perpendicular a una de sus caras, se obtiene la figura 2.14a.
En esta vista el cubo parece bidimensional. No puede verse la dimensión perpendicular a la página. Para remediar esto, es posible mover el punto de vista hacia
arriba y a la derecha, de donde se obtiene la figura 2.14b. En esta vista oblicua la
tercera dimensión ya es visible. Los bordes ocultos del cubo se muestran como
líneas discontinuas.
y
y
x
z
(a)
(b)
Figura 2.14
(a) Cubo visto con la línea visual perpendicular a una cara.
(b) Vista oblicua del cubo.
(c) Sistema coordenado cartesiano alineado con los bordes del cubo.
(d) Representación tridimensional del sistema coordenado.
43
x
z
(c)
(d)
44
Capítulo 2 Vectores
y
Este método puede usarse para dibujar los sistemas coordenados tridimensionales. En la figura 2.14c se alinearon los ejes x, y y z de un sistema coordenado
cartesiano tridimensional con los bordes del cubo. La representación tridimensional del sistema coordenado se muestra en la figura 2.14d. Se dice que este sistema
coordenado es derecho. Si se dirigen los dedos de la mano derecha en la dirección
positiva del eje x y se doblan (como preparándose para cerrar el puño) hacia el eje
y positivo, el pulgar apuntará en la dirección positiva del eje z (figura 2.15). En
caso contrario, el sistema coordenado será izquierdo. Debido a que algunas ecuaciones usadas en matemáticas e ingeniería no producen resultados correctos con un
sistema coordenado izquierdo, se usarán sólo sistemas coordenados derechos.
Un vector U puede expresarse en términos de sus componentes vectoriales Ux,
Uy y Uz paralelas a los ejes x, y y z, respectivamente (figura 2.16):
z
x
Figura 2.15
Identificación de un sistema coordenado
derecho.
U = Ux + Uy + Uz.
(2.11)
y
(Se ha dibujado una caja alrededor del vector como ayuda para visualizar las direcciones de las componentes vectoriales). Si se introducen los vectores unitarios i, j
y k que apuntan hacia las direcciones positivas x, y y z, es posible expresar U en
términos de sus componentes escalares como:
Uz
Uy
U
j
Ux
x
z
U = Ux i + Uy j + Uz k.
i
k
(2.12)
Los escalares Ux, Uy y Uz se denominarán las componentes x, y y z de U.
Figura 2.16
Un vector U y sus componentes vectoriales.
Magnitud de un vector en términos de sus componentes
Considere un vector U y sus componentes vectoriales (figura 2.17a). En el triángulo rectángulo formado por los vectores Uy, Uz y su suma Uy Uz (figura 2.17b),
se puede ver que
ƒ Uy + Uz ƒ 2 = ƒ Uy ƒ 2 + ƒ Uz ƒ 2.
(2.13)
El vector U es la suma de los vectores Ux y Uy Uz. Estos tres vectores forman
un triángulo rectángulo (figura 2.17c), a partir del cual se obtiene
ƒ U ƒ 2 = ƒ Ux ƒ 2 + ƒ Uy + Uz ƒ 2.
Sustituyendo la ecuación (2.13) en este resultado se obtiene la ecuación
ƒ U ƒ 2 = ƒ Ux ƒ 2 + ƒ Uy ƒ 2 + ƒ Uz ƒ 2 = U2x + U2y + U2z .
y
y
y
Uz
Uz
Uy
U
Uy Uz
U
Uy
Ux
x
z
Ux
x
z
(a)
x
z
(b)
Figura 2.17
(a) Vector U y sus componentes vectoriales.
(b) Triángulo rectángulo formado por los vectores Uy, Uz y Uy Uz.
(c) Triángulo rectángulo formado por los vectores U, Ux, y Uy Uz.
Uy Uz
(c)
45
2.3 Componentes en tres dimensiones
y
y
y
U
U
uy
Uy j
uz
ux
ux
x
Uxi
x
z
z
(c)
Así, la magnitud de un vector U está dada, en términos de sus componentes, en tres
dimensiones, mediante la expresión
ƒ U ƒ = 2U2x + U2y + U2z .
(2.14)
Cosenos directores
Anteriormente se describió la dirección de un vector relativa a un sistema coordenado cartesiano bidimensional especificando el ángulo entre el vector y uno de los
ejes coordenados. Una manera de describir la dirección de un vector en tres dimensiones es especificar los ángulos ux, uy y uz entre el vector y los ejes coordenados
positivos (figura 2.18a).
En las figuras 2.18(b)-(d) se demuestra que las componentes del vector U
están dadas, respectivamente, en términos de los ángulos ux, uy y uz, por
Ux = ƒ U ƒ cos ux, Uy = ƒ U ƒ cos uy, Uz = ƒ U ƒ cos uz.
(2.15)
Las cantidades cos ux, cos uy y cos uz se llaman cosenos directores de U. Los cosenos directores de un vector no son independientes: si se sustituyen las ecuaciones
(2.15) en la ecuación (2.14), se encuentra que los cosenos directores satisfacen la
relación
cos2 ux + cos2 uy + cos2 uz = 1.
(2.16)
Suponga que e es un vector unitario con la misma dirección de U, de forma que
U = ƒ U ƒ e.
En términos de las componentes, esta ecuación es
Ux i + Uy j + Uz k = ƒ U ƒ 1ex i + ey j + ez k2.
Así, las relaciones entre las componentes de U y e son
Ux = ƒ U ƒ ex, Uy = ƒ U ƒ ey, Uz = ƒ U ƒ ez.
Al comparar estas ecuaciones con las ecuaciones (2.15), se observa que
cos uy = ey,
uz
U zk
Figura 2.18
(a) Un vector U y los ángulos ux, uy y uz.
(b)–(d) Los ángulos ux, uy y uz y las componentes vectoriales de U.
cos ux = ex,
U
U
x
(b)
(a)
uy
x
z
z
y
cos uz = ez.
Los cosenos directores de cualquier vector U son las componentes de un vector
unitario que tiene la misma dirección que U.
(d)
46
Capítulo 2 Vectores
y
y
Figura 2.19
(a) Vector de posición del punto A al
punto B.
(b) Las componentes de rAB se pueden
determinar a partir de las coordenadas de
los puntos A y B.
rAB
(zB zA)k
B
(xB, yB, zB)
B
rAB
A
(yB yA)j
A
(xB xA)i
(xA, yA, zA)
x
z
x
z
(b)
(a)
Vectores de posición en términos de sus componentes
A partir de una generalización del caso bidimensional, podemos considerar un
punto A con coordenadas (xA, yA, zA) y un punto B con coordenadas (xB, yB, zB). El
vector de posición rAB que va de A a B, que se muestra en la figura 2.19a, está dado
en función de las coordenadas de A y B por
rAB = 1xB - xA2i + 1yB - yA2j + 1zB - zA2k.
(2.17)
Las componentes se obtienen restando las coordenadas del punto A de las coordenadas del punto B (figura 2.19b).
Componentes de un vector paralelo a una línea dada
En aplicaciones tridimensionales, la dirección de un vector suele definirse especificando las coordenadas de dos puntos sobre una línea paralela al vector. Esta
información puede usarse para determinar las componentes del vector.
Suponga que se conocen las coordenadas de dos puntos A y B sobre una línea
paralela al vector U (figura 2.20a). Se puede usar la ecuación (2.17) para determi-
y
B
y
B
(xB, yB, zB)
rAB
U
A
U
A
(xA, yA, zA)
x
x
z
z
(a)
(b)
y
B
A
Figura 2.20
(a) Dos puntos A y B sobre una línea paralela a U.
(b) Vector de posición de A a B.
(c) Vector unitario eAB que apunta desde A hacia B.
eAB rAB
rAB
U UeAB
x
z
(c)
2.3 Componentes en tres dimensiones
nar el vector de posición rAB que va de A a B (figura 2.20b). Se divide rAB entre su
magnitud para obtener un vector unitario eAB que apunta de A a B (figura 2.20c).
Como eAB tiene la misma dirección que U, se puede determinar U en términos de
sus componentes escalares expresándolo como el producto de su magnitud y eAB.
En forma más general, suponga que se conoce la magnitud de un vector U y
las componentes de cualquier vector V que tiene la misma dirección que U.
Entonces V/V es un vector unitario con la misma dirección que U, y las componentes de U pueden determinarse mediante la expresión U U(V/[V).
RESULTADOS
Cualquier vector U puede expresarse como
U Ux i Uy j Uz k,
(2.12)
donde i es un vector unitario que apunta en la dirección del
eje x, j es un vector unitario que apunta en la dirección
positiva del eje y, y k es un vector unitario que apunta en la
dirección positiva del eje z.
y
U
La magnitud de U está dada por
x
U U2x U2y U2z.
(2.14)
z
Cosenos directores
La dirección de un vector U en relación
con un sistema coordenado dado puede
especificarse mediante los ángulos
ux, uy, y uz entre el vector y los ejes
coordenados positivos.
y
U
uy
Las componentes de U están dadas por
uz
Ux Ucos ux,
Uy Ucos uy,
(2.15)
Uz Ucos uz.
Los términos cos ux, cos uy, y cos uz se denominan los
cosenos directores de U. Los cosenos directores son
las componentes de un vector unitario con la misma
dirección que U.
z
ux
x
47
48
Capítulo 2 Vectores
Vectores de posición en términos de sus componentes
y
B
(xB, yB, zB)
rAB
El vector de posición de A a B está dado por
rAB (xB xA)i (yB yA)j (zB zA)k.
(2.17)
A
(xA, yA, zA)
x
z
Componentes de un vector paralelo a una línea dada
U
y
B
El vector U es paralelo a la línea que pasa a
través de los puntos A y B.Obtenga el vector
de posición rAB de A a B en términos de sus
componentes. Divida rAB entre su magnitud
para obtener un vector unitario eAB que es paralelo a la línea. Entonces, el vector U en
términos de sus componentes está dado por
(xB, yB, zB)
U
A
(xA, yA, zA)
x
U 兩U兩eAB.
z
Ejemplo activo 2.6
Cosenos directores (䉴 Relacionado con el problema 2.67)
Las coordenadas del punto C de la armadura que se muestra en la figura son xC 4 m,
yC 0, zC 0, y las coordenadas del punto D son xD 2 m, yD 3 m, zD 1 m.
¿Cuáles son los cosenos directores del vector de posición rCD desde el punto C hasta
el punto D?
y
D
A
C
z
B
x
2.3 Componentes en tres dimensiones
Estrategia
Si se conocen las coordenadas de los puntos C y D, es posible determinar rCD en
términos de sus componentes. Después se puede calcular la magnitud de rCD (la distancia de C a D) y usar las ecuaciones (2.15) para obtener los cosenos directores.
Solución
y
D (2, 3, 1) m
rCD
(4, 0, 0) m
C
z
rCD (xD xC)i (yD yC)j (zD zC)k.
(2 4)i (3 0)j (1 0)k (m)
2i 3j k (m).
Determine el vector de posición rCD
en términos de sus componentes.
rCD r2CDx r2CDy r2CDz
(2 m)2 (3 m)2 (1 m)2
Calcule la magnitud de rCD.
3.74 m.
cos ux cos uy cos uz rCDx
rCD
rCDy
rCD
rCDz
rCD
2 m
0.535,
3.74 m
3m
0.802,
3.74 m
1m
0.267,
3.74 m
Determine los cosenos directores.
Problema de práctica Las coordenadas del punto B de la armadura son xB 2.4 m,
yB 0, zB 3 m. Determine las componentes de un vector unitario eBD que apunta
desde B hacia D.
Respuesta: eBD 0.110i 0.827j 0.551k.
x
49
50
Capítulo 2 Vectores
Ejemplo 2.7
Determinación de componentes en tres dimensiones ( Relacionado con el
problema 2.76)
La grúa que se muestra en la figura ejerce una fuerza F de 600 lb sobre el cajón hidráulico. El ángulo entre F y el eje x es de 54° y el ángulo entre F y el eje y es de
40°. La componente z de F es positiva. Exprese F en términos de sus componentes.
y
40
F
54
x
z
Estrategia
Se dan sólo dos de los ángulos entre el vector y los ejes coordenados positivos, pero
se puede usar la ecuación (2.16) para determinar el tercer ángulo. Luego es posible
determinar las componentes de F usando las ecuaciones (2.15).
Solución
Los ángulos entre F y los ejes coordenados positivos están relacionados por
cos2 ux + cos2 uy + cos2 uz = 1cos 54°22 + 1cos 40°22 + cos2 uz = 1.
Al despejar cos uz de esta ecuación se obtienen las dos soluciones, cos uz 0.260
y cos uz 0.260, que implican que uz 74.9° o uz 105.1°. La componente z
del vector F es positiva, por lo que el ángulo entre F y el eje z positivo es menor
que 90°. Por lo tanto, uz 74.9°.
Las componentes de F son
Fx = ƒ F ƒ cos ux = 600 cos 54° = 353 lb,
Fy = ƒ F ƒ cos uy = 600 cos 40° = 460 lb,
Fz = ƒ F ƒ cos uz = 600 cos 74.9° = 156 lb.
Razonamiento crítico
Debe hacerse notar que cuando se conoce el cuadrado de un número no se sabe el
valor del número de manera única. Si a2 4, el número a puede ser 2 o bien 2.
En este ejemplo, el conocimiento de los ángulos ux y uy permitió despejar el valor
de cos2 uz de la ecuación (2.16), lo cual resultó en dos posibles valores del ángulo
uz. Existe una explicación geométrica simple para esto: los dos ángulos ux y uy son
suficientes para definir una línea paralela al vector F, pero no la dirección de F
sobre esa línea. Los dos valores de uz que se obtuvieron corresponden a las dos
posibles direcciones de F a lo largo de la línea. Se requiere información adicional
para indicar la dirección. En este ejemplo, la información adicional fue proporcionada estableciendo que la componente z de F es positiva.
51
2.3 Componentes en tres dimensiones
Ejemplo 2.8
Determinación de componentes en tres dimensiones ( Relacionado con el
problema 2.86)
El cable del globo que se muestra en la figura ejerce una fuerza F de 800 N sobre
el gancho en O. La línea vertical AB interseca el plano x–z en el punto A. El ángulo entre el eje z y la línea OA es de 60° y el ángulo entre la línea OA y F es de 45°.
Exprese F en términos de sus componentes.
y
Estrategia
B
Pueden determinarse las componentes de F en dos etapas usando la información
geométrica dada. Primero se expresa F como la suma de dos componentes vectoriales paralelas a las líneas OA y AB. La componente paralela a AB es la componente
vectorial Fy. Luego puede usarse la componente paralela a OA para determinar las
componentes vectoriales Fx y Fz.
F
O
O
x
A
z
Solución
En la figura a se expresa F como la suma de su componente en y, Fy, y la componente Fh paralela a OA. La magnitud de Fy es
y
Fy F sen 45° (800 N) sen 45° 566 N,
B
y la magnitud de Fh es
ƒ Fh ƒ = ƒ F ƒ cos 45° = 1800 N2 cos 45° = 566 N.
En la figura b se expresa Fh en términos de las componentes vectoriales Fx y Fz. La
magnitud de Fx es
F
Fy
45
O
x
Fh
A
z
(a) Descomposición de F en
Fx Fh sen 60° (566 N) sen 60° 490 N,
componentes vectoriales
paralelas a OA y OB.
y la magnitud de Fz es
y
ƒ Fz ƒ = ƒ Fh ƒ cos 60° = 1566 N2 cos 60° = 283 N.
B
Las componentes vectoriales Fx, Fy y Fz apuntan en las direcciones positivas de los
ejes, por lo que las componentes escalares de F son positivas:
F = 490i + 566j + 283k 1N2.
Fx
O
Fz
Razonamiento crítico
Como este ejemplo lo demuestra, se requieren dos ángulos para especificar la dirección de un vector en relación con un sistema coordenado tridimensional. Los
dos ángulos usados podrían no estar definidos del mismo modo que en el ejemplo,
pero sin importar cómo estén definidos, pueden determinarse las componentes del
vector en términos de la magnitud y los dos ángulos especificados mediante un procedimiento similar al que se empleó aquí.
F
Fy
60
x
Fh
A
z
(b) Descomposición de Fh en componentes vectoriales paralelas a los
ejes x y z.
52
Capítulo 2 Vectores
Ejemplo 2.9
Determinación de componentes en tres dimensiones ( Relacionado con el
problema 2.90)
Una cuerda se extiende del punto B al punto C pasando por una argolla metálica
unida a la pared en el punto A. La cuerda ejerce fuerzas FAB y FAC sobre la argolla
cuyas magnitudes son FAB FAC 200 lb. ¿Cuál es la magnitud de la fuerza total
F FAB FAC ejercida por la cuerda sobre la argolla?
y
6
pies
6
pies
A
A
FAB
7 pies
4 pies
x
4 pies
6 pies
B
B
C
2 pies
2 pies
FAC
7 pies
10 pies
6 pies
C
10 pies
z
Estrategia
La fuerza FAB es paralela a la línea que va de A a B y la fuerza FAC es paralela a la
línea que va de A a C. Debido a que es posible determinar las coordenadas de los
puntos A, B y C a partir de las dimensiones dadas, también se pueden determinar las componentes de los vectores unitarios que tienen las mismas direcciones
que las dos fuerzas y usarlos para expresar las fuerzas en términos de componentes
escalares.
Solución
Sean rAB el vector de posición de A a B y rAC el vector de posición de A a C (figura a). A partir de las dimensiones dadas, las coordenadas de los puntos A, B y C son
A: (6, 7, 0) pies,
B: (2, 0, 4) pies,
C: (12, 0, 6) pies.
y
A
rAB
rAC
B
x
C
z
(a) Vectores de posición rAB y rAC.
Por lo tanto, las componentes de rAB y rAC, con las coordenadas en pies, están
dadas por
rAB = 1xB - xA2i + 1yB - yA2j + 1zB - zA2k
= 12 - 62i + 10 - 72j + 14 - 02k
4i 7j 4k (pies)
2.3 Componentes en tres dimensiones
y
rAC = 1xC - xA2i + 1yC - yA2j + 1zC - zA2k
= 112 - 62i + 10 - 72j + 16 - 02k
6i 7j 6k (pies)
Sus magnitudes son rAB 9 pies y rAC 11 pies. Al dividir rAB y rAC entre sus
magnitudes se obtienen los vectores unitarios eAB y eAC que apuntan en las direcciones de FAB y FAC (figura b):
eAB =
eAC =
rAB
ƒ rAB ƒ
rAC
ƒ rAC ƒ
= - 0.444i - 0.778j + 0.444k,
= 0.545i - 0.636j + 0.545k.
y
eAB
A
eAC
x
B
C
z
(b)
Vectores unitarios eAB y eAC.
Las fuerzas FAB y FAC son
FAB = 1200 lb2eAB = - 88.9i - 155.6j + 88.9k 1lb2,
FAC = 1200 lb2eAC = 109.1i - 127.3j + 109.1k 1lb2.
La fuerza total ejercida sobre la argolla por la cuerda es
F = FAB + FAC = 20.2i - 282.8j + 198.0k 1lb2,
y su magnitud es
ƒ F ƒ = 2120.222 + 1-282.822 + 1198.022 = 346 lb.
Razonamiento crítico
¿Cómo se puede saber que la magnitud y la dirección de la fuerza total ejercida por
la cuerda sobre la argolla de metal en A está dada por la magnitud y la dirección
del vector F FAB FAC? Hasta este punto del desarrollo de la mecánica, se
supone que la fuerza es un vector, pero no se ha hecho una demostración de ello.
En el estudio de la dinámica se demuestra que la segunda ley de Newton implica
que la fuerza es un vector.
53
54
Capítulo 2 Vectores
Ejemplo 2.10
Determinación de las componentes de una fuerza ( Relacionado con el problema 2.95)
El cable AB ejerce una fuerza T de 50 N sobre el collar en A. Exprese T en términos de las componentes.
y
0.15 m
0.4 m
B
C
T
0.2 m
A
0.3 m
0.5 m
O
x
D
0.25 m
0.2 m
z
Estrategia
Sea rAB el vector de posición desde A hasta B. Se dividirá rAB entre su magnitud para
obtener un vector unitario eAB que tiene la misma dirección de la fuerza T. Después
se puede obtener T en términos de sus componentes escalares al expresarlo como
el producto de su magnitud y eAB. Para iniciar este procedimiento, primero se deben
determinar las coordenadas del collarín A. Esto se hará obteniendo un vector unitario eCD que apunte desde C hacia D, para después multiplicarlo por 0.2 m y así
determinar la posición del collarín A en relación con C.
Solución
Determinación de las coordenadas del punto A El vector de posición de C a
D, con las coordenadas en metros, es
0.15 m
rCD = 10.2 - 0.42i + 10 - 0.32j + 10.25 - 02k
= - 0.2i - 0.3j + 0.25k 1m2.
y
Al dividir este vector entre su magnitud se obtiene el vector unitario eCD (figura a):
eCD =
0.4 m
B
C
rCD
ƒ rCD ƒ
-0.2i - 0.3j + 0.25k
=
21- 0.222 + 1- 0.322 + 10.2522
= - 0.456i - 0.684j + 0.570k.
eCD
eAB
0.5 m
O
x
D
z
Usando este vector se obtiene el vector de posición de C a A:
0.3 m
A
0.25 m
0.2 m
(a) Vectores unitarios eAB y eCD.
rCA = 10.2 m2eCD = - 0.091i - 0.137j + 0.114k 1m2.
El vector de posición desde el origen del sistema coordenado hasta C es rOC 0.4i
0.3j (m), por lo que el vector de posición desde el origen hasta A es
rOA = rOC + rCA = 10.4i + 0.3j2 + 1- 0.091i - 0.137j + 0.114k2
= 0.309i + 0.163j + 0.114k 1m2.
Las coordenadas de A son (0.309, 0.163, 0.114) m.
Problemas
55
Determinación de las componentes de T Usando las coordenadas del punto A,
se encuentra que el vector de posición de A a B es
rAB = 10 - 0.3092i + 10.5 - 0.1632j + 10.15 - 0.1142k
= - 0.309i + 0.337j + 0.036k 1m2.
Al dividir este vector entre su magnitud, se obtiene el vector unitario eAB (figura a).
eAB =
rAB
ƒ rAB ƒ
=
-0.309i + 0.337j + 0.036k 1m2
21-0.309 m22 + 10.337 m22 + 10.036 m22
= - 0.674i + 0.735j + 0.079k.
La fuerza T es
T = ƒ T ƒ eAB = 150 N21 -0.674i + 0.735j + 0.079k2
= - 33.7i + 36.7j + 3.9k 1N2.
Razonamiento crítico
Observe las dos formas en que se usaron los vectores unitarios en este ejemplo. El
vector unitario eCD se empleó para obtener las componentes del vector de posición
rCA, que hizo posible determinar las coordenadas del punto A. Las coordenadas del
punto A se usaron después para determinar el vector unitario eAB, el cual se empleó
para expresar la fuerza T en términos de sus componentes.
Problemas
2.61 ¿Cuál es la magnitud de un vector U 3i 4j 12k?
Estrategia: La magnitud de un vector está dada, en términos
de sus componentes, por la ecuación (2.14).
2.64 Un vector U Uxi Uy j Uzk. Su magnitud U 30. Sus
componentes están relacionadas con las ecuaciones Uy 2Ux y
Uz 4Uy. Determine las componentes.
2.62 El vector e = 13 i + 23 j + ez k es un vector unitario. Determine la componente ez.
2.65 Un objeto está sometido a dos fuerzas F1 20i 30j 24k
(kN) y F2 60i 20j 40k (kN). ¿Cuál es la magnitud de la
fuerza total que actúa sobre el objeto?
2.63 Un ingeniero determina que el punto de unión en la figura
estará sujeto a una fuerza F 20i Fy j 45k (kN). Si el punto
de unión deberá soportar de manera segura una fuerza con magnitud de 80 kN en cualquier dirección, ¿cuál es el intervalo aceptable
de valores para Fy?
2.66 Se tienen dos vectores U 3i 2j 6k y
V 4i 12j 3k.
a) Determine las magnitudes de U y V.
b) Determine la magnitud del vector 3U 2V.
2.67 En el ejemplo activo 2.6, suponga que se desea rediseñar la armadura, cambiando la posición del punto D de tal forma
que la magnitud del vector rCD del punto C al punto D sea 3 m.
Para lograr esto, considere que las coordenadas del punto D son
(2, yD, 1) m, y determine el valor de yD tal que rCD 3 m.
Haga un bosquejo de la armadura con el punto D en su nueva
posición. ¿Cuáles son los nuevos cosenos directores de rCD?
y
F
z
x
Problema 2.63
2.68 Un vector de fuerza está dado en términos de sus componentes por F 10i 20j 20k (N).
a) ¿Cuáles son los cosenos directores de F?
b) Determine las componentes de un vector unitario e que tiene la
misma dirección que F.
56
Capítulo 2 Vectores
2.69 El cable ejerce una fuerza F sobre el gancho en O cuya
magnitud es 200 N. El ángulo entre F y el eje x es de 40° y el ángulo entre F y el eje y es de 70°.
a) ¿Cuál es el ángulo entre el vector F y el eje z?
b) Exprese F en términos de sus componentes.
Estrategia: a) Dado que se conocen los ángulos entre el
vector F y los ejes x e y, puede usarse la ecuación (2.16) para
determinar el ángulo entre F y el eje z (observe en la figura que
el ángulo entre F y el eje z está claramente dentro del intervalo
0 uz 180°.) b) Las componentes de F pueden obtenerse con
las ecuaciones (2.15).
Para resolver los problemas 2.72 a 2.75 consulte el
siguiente diagrama:
y
D (4, 3, 1) m
A
C (6, 0, 0) m
x
z
B (5, 0, 3) m
Problemas 2.72–2.75
2.72 Determine las componentes del vector de posición rBD del
punto B al punto D. Use su resultado para determinar la distancia
desde B hasta D.
y
70
2.73 ¿Cuáles son los cosenos directores del vector de posición
rBD del punto B al punto D?
F
40
2.74 Determine las componentes del vector unitario eCD que
apunta desde el punto C hacia el punto D.
x
O
2.75 ¿Cuáles son los cosenos directores del vector unitario eCD
que apunta desde el punto C hacia el punto D?
z
Problema 2.69
2.70 Un vector unitario tiene los cosenos directores cos ux 0.5
y cos uy 0.2. Su componente z es positiva. Exprese este vector en
términos de sus componentes.
2.71 Los motores de un avión ejercen una fuerza de empuje
total T con magnitud de 200 kN. El ángulo entre T y el eje x es
de 120°, y el ángulo entre T y el eje y es de 130°. La componente
z de T es positiva.
a) ¿Cuál es el ángulo entre T y el eje z?
b) Exprese T en términos de sus componentes.
2.76 En el ejemplo 2.7, suponga que se cambia el cajón a
una nueva posición sobre el suelo. La magnitud de la fuerza F
permanece en 600 lb. En la nueva posición, el ángulo entre la
fuerza F y el eje x es de 60° y el ángulo entre F y el eje z es de
70°. Exprese F en términos de sus componentes.
2.77 En el trasbordador espacial, los astronautas usan radar
para determinar las magnitudes y los cosenos directores de los
vectores de posición de dos satélites, A y B. El vector rA del
trasbordador al satélite A tiene una magnitud de 2 km y cosenos
directores cos ux 0.768, cos uy 0.384, cos uz 0.512. El
vector rB del trasbordador al satélite B tiene una magnitud de
4 km y cosenos directores cos ux 0.743, cos uy 0.557,
cos uz 0.371. ¿Cuál es la distancia entre los satélites?
B
y
y
rB
x
130
x
x
120
A
T
z
z
Problema 2.71
y
rA
z
Problema 2.77
Problemas
2.78 Unos arqueólogos midieron una estructura ceremonial
precolombina y obtuvieron las dimensiones mostradas. Determine a) la magnitud y b) los cosenos directores del vector de
posición del punto A al punto B.
y
4m
10 m
4m
10 m
A
8m
B
b
57
2.82* Un topógrafo midió originalmente la altura del Monte
Everest con el siguiente procedimiento. Primero midió la altitud
de dos puntos y la distancia horizontal entre ellos. Por ejemplo,
suponga que los puntos A y B de la figura están a 3000 m sobre el
nivel del mar y que entre ellos hay una distancia de 10,000 m.
Luego usó un teodolito para medir los cosenos directores del
vector rAP del punto A a la cima P de la montaña y del vector
rBP del punto B a P. Suponga que para rAP se obtuvieron los cosenos directores cos ux 0.5179, cos uy 0.6906, cos uz 0.5048
y que para rBP los cosenos directores obtenidos fueron cos ux –0.3743, cos uy 0.7486, y cos uz 0.5472. Usando estos datos,
determine la altura del Monte Everest sobre el nivel del mar.
8m
z
z
C
P
x
Problema 2.78
2.79 Considere la estructura descrita en el problema 2.78. Al regresar a Estados Unidos, un arqueólogo se da cuenta de que un
estudiante de posgrado ha borrado el único archivo que contiene
la dimensión b. Pero con los datos guardados en el GPS es posible calcular que la distancia del punto B al punto C es de 16.61 m.
a) ¿Cuál es la distancia b?
b) Determine los cosenos directores del vector que va de B a C.
2.80 Los observadores A y B usan teodolitos para medir la
dirección de sus posiciones al cohete en vuelo que se muestra
en la figura. Si las coordenadas de la posición del cohete en un
instante dado son (4, 4, 2) km, determine los cosenos directores
de los vectores rAR y rBR que los observadores medirían en ese
instante.
y
x
B
A
Problema 2.82
2.83 La distancia del punto O al punto A es de 20 pies. La línea
recta AB es paralela al eje y, y el punto B está en el plano x–z. Exprese el vector de rOA en términos de sus componentes.
Estrategia: Se puede expresar rOA como la suma de un vector
de O a B y un vector de B a A. Luego se puede expresar el vector de O a B como la suma de componentes vectoriales paralelas a
los ejes x y z. Vea el ejemplo 2.8.
2.81* Suponga que las coordenadas de la posición del cohete
de la figura no se conocen. En un instante dado, la persona A
determina que los cosenos directores de rAR son cos ux 0.535,
cos uy 0.802 y cos uz 0.267, y la persona en B determina
que los cosenos directores de rBR son cos ux 0.576, cos uy
0.798 y cos uz 0.177. ¿Cuáles son las coordenadas de la
posición del cohete en ese instante?
y
A
rOA
O
y
x
30
60
B
z
Problema 2.83
rAR
rBR
A
x
z
B (5, 0, 2) km
Problemas 2.80/2.81
58
Capítulo 2 Vectores
2.84 Las magnitudes de los dos vectores de fuerza son
FA 140 lb y FB 100 lb. Determine la magnitud de la suma
de las fuerzas FA FB.
2.85 Determine los cosenos directores de los vectores FA y FB.
2.88 El cable BC de la figura ejerce una fuerza F de 8 kN sobre
la barra AB en B.
a) Determine las componentes de un vector unitario que apunta
desde el punto B hacia el punto C.
b) Exprese la fuerza F en términos de sus componentes.
y
y
B (5, 6, 1) m
FB
FA
60
30
40
F
x
A
50
x
z
C (3, 0, 4) m
Problemas 2.84/2.85
z
Problema 2.88
2.86 En el ejemplo 2.8, suponga que un cambio en el viento
ocasiona un cambio en la posición del globo e incrementa a 900 N
la magnitud de la fuerza F ejercida sobre el gancho en O. En la
nueva posición, el ángulo entre las componentes vectoriales Fh y
F es de 35° y el ángulo entre las componentes vectoriales Fh y Fz
es de 40°. Haga un bosquejo que muestre la relación de estos ángulos con las componentes de F. Exprese F en términos de sus
componentes.
2.87 Un ingeniero calcula que la magnitud de la fuerza axial
en una de las vigas de un domo geodésico es P 7.65 kN. Las
coordenadas cartesianas de los extremos A y B de la viga recta que
se muestra en la figura son (–12.4, 22.0, –18.4) m y (–9.2, 24.4,
–15.6) m, respectivamente. Exprese la fuerza P en términos de sus
componentes.
2.89 Un cable se extiende desde el punto C hasta el punto E,
como se muestra en la figura. Ejerce una fuerza T de 50 lb sobre
la placa en C dirigida a lo largo de la línea que va de C a E. Exprese T en términos de sus componentes.
y
6 pies
E
A
20
B
x
4 pies
T
2 pies
z
D
C
4 pies
B
Problema 2.89
P
A
Problema 2.87
2.90 En el ejemplo 2.9, suponga que la argolla de metal en A
se mueve hacia arriba de manera que la distancia vertical hasta
A se incrementa de 7 a 8 pies. Como resultado, las magnitudes de
las fuerzas FAB y FAC aumentan a FAB FAC 240 lb. ¿Cuál
es la magnitud de la fuerza total F FAB FAC ejercida por la
cuerda sobre la argolla?
Problemas
2.91 El cable AB mostrado ejerce una fuerza FAB de 200 lb en el
punto A dirigida a lo largo de la línea que va de A a B. Exprese
FAB en términos de sus componentes.
2.92 El cable AB ejerce una fuerza FAB de 200 lb en el punto A
que está dirigida a lo largo de la línea de A a B. El cable AC ejerce una fuerza FAC de 100 lb en A que está dirigida a lo largo de la
línea que va de A a C. Determine la magnitud de la fuerza total
ejercida en A por los dos cables.
59
2.95 En el ejemplo 2.10, suponga que la distancia del punto
C al collarín A se incrementa de 0.2 m a 0.3 m, y que la magnitud
de la fuerza T aumenta a 60 N. Exprese T en términos de sus
componentes.
2.96 El cable AB mostrado ejerce una fuerza T de 32 lb sobre el
collarín en A. Exprese T en términos de sus componentes.
y
y
4 pies
8 pies
C
T
B
A
6 pies
8 pies
6 pies
7 pies
B
A
4 pies
z
FAC
FAB
z
x
4 pies
x
Problema 2.96
A (6, 0, 10) pies
2.97 La barra circular que se muestra en la figura tiene 4 m de
radio y pertenece al plano x–y. Exprese el vector de posición del
punto B al collarín en A en términos de sus componentes.
Problemas 2.91/2.92
2.93 La torre de 70 m de altura que se muestra está soportada
por tres cables que ejercen sobre ella las fuerzas FAB, FAC y FAD.
La magnitud de cada fuerza es de 2 kN. Exprese la fuerza total
ejercida sobre la torre por los tres cables en términos de sus componentes.
2.98 El cable AB que se muestra en la figura ejerce una fuerza T
de 60 N sobre el collarín en A, que está dirigida a lo largo de la
línea que va de A a B. Exprese T en términos de sus componentes.
y
2.94 La magnitud de la fuerza FAB es de 2 kN. Las componentes
x y z de la suma vectorial de las fuerzas ejercidas sobre la torre
por los tres cables son iguales a cero. ¿Cuáles son las magnitudes
de FAC y FAD?
3m
B
A
y
FAD
A
A
4m
FAB
FAC
20
D
4m
60 m
60 m
z
B
40 m
C
40 m
40 m
z
Problemas 2.93/2.94
x
Problemas 2.97/2.98
x
60
Capítulo 2 Vectores
2.4 Productos punto
ANTECEDENTES
U
V
(a)
V
Se ha encontrado que dos clases de productos vectoriales, el producto punto y el
producto cruz, tienen aplicaciones en casi todas las áreas científicas y de ingeniería, especialmente en mecánica y en la teoría del campo electromagnético. En el
capítulo 4 se usarán ambos productos para evaluar momentos de fuerzas respecto
a puntos y líneas.
El producto punto de dos vectores tiene muchos usos, incluida la determinación de las componentes paralela y perpendicular a una línea dada para un vector,
así como la determinación del ángulo entre dos líneas en el espacio.
Definición
u
U
(b)
Figura 2.21
(a) Vectores U y V.
(b) El ángulo u entre U y V cuando los dos
vectores se colocan cola con cola.
Considere los vectores U y V (figura 2.21a). El producto punto de U y V, denotado por U V (de ahí el nombre de “producto punto”), se define como el producto
formado por la magnitud de U, la magnitud de V y el coseno del ángulo u entre U
y V cuando éstos se colocan cola con cola (figura 2.21b):
U # V = ƒ U ƒ ƒ V ƒ cos u.
(2.18)
Como el resultado del producto punto es un escalar, se denomina también producto escalar. Las unidades del producto punto son el producto de las unidades de los
dos vectores. Observe que el producto punto de dos vectores distintos de cero es
igual a cero si y sólo si los dos vectores son perpendiculares.
El producto punto tiene las siguientes propiedades:
U # V = V # U,
El producto punto es conmutativo.
a 1U # V2 = 1aU2 # V = U # 1aV2,
El producto punto es asociativo
con respecto a la multiplicación
escalar.
(2.19)
(2.20)
y
U # 1V + W2 = U # V + U # W,
El producto punto es asociativo
con respecto a la suma vectorial.
(2.21)
para todo escalar a y vectores U, V y W cualesquiera.
Productos punto en términos de sus componentes
En esta sección se obtendrá una ecuación que permitirá determinar el producto punto
de dos vectores si se conocen sus componentes escalares. Esta deducción también
resultará en una ecuación para calcular el ángulo entre los vectores. El primer paso es
determinar los productos punto formados con los vectores unitarios i, j y k. A continuación se evaluará el producto punto i i. La magnitud i 1 y el ángulo entre dos
vectores idénticos colocados cola con cola es igual a cero, por lo que se obtiene
i # i = ƒ i ƒ ƒ i ƒ cos 102 = 112112112 = 1.
El producto punto de i y j es
i # j = ƒ i ƒ ƒ j ƒ # cos 190°2 = 112112102 = 0.
Continuando de la misma manera, se obtiene
i # i = 1,
j # i = 0,
k # i = 0,
i # j = 0,
j # j = 1,
k # j = 0,
i # k = 0,
j # k = 0,
k # k = 1.
(2.22)
2.4 Productos punto
61
El producto punto de dos vectores U y V expresado en términos de sus componentes es
U # V = 1Ux i + Uy j + Uz k2 # 1Vx i + Vy j + Vz k2
= UxVx1i # i2 + UxVy1i # j2 + UxVz1i # k2
+ UyVx1j # i2 + UyVy1j # j2 + UyVz1j # k2
+ UzVx1k # i2 + UzVy1k # j2 + UzVz1k # k2.
L
Para obtener este resultado se usan las ecuaciones (2.20) y (2.21). Sustituyendo las
ecuaciones (2.22) en esta expresión, se tiene una ecuación para el producto punto
en términos de las componentes escalares de los dos vectores:
U # V = UxVx + UyVy + UzVz.
(2.23)
Para obtener una ecuación para el ángulo u en términos de las componentes de los
vectores, se iguala la expresión para el producto punto dada por la ecuación (2.23)
con la definición del producto punto, ecuación (2.18), y se despeja cos u:
cos u =
UxVx + UyVy + UzVz
U#V
=
.
U
(a)
(2.24)
L
ƒUƒ ƒVƒ
ƒUƒ ƒVƒ
Componentes vectoriales paralela y normal a una línea
En algunas aplicaciones de ingeniería es necesario expresar un vector en términos
de las componentes vectoriales paralela y normal (perpendicular) a una línea dada.
La componente de un vector paralela a una línea se denomina proyección del vector sobre la línea. Por ejemplo, cuando el vector representa una fuerza, la proyección de ésta sobre una línea es la componente de la fuerza en la dirección de la
línea.
Las componentes de un vector paralela y normal a una línea pueden determinarse usando el producto punto. Considere un vector U y una línea recta L (figura
2.22a). Es posible expresar U como la suma de las componentes vectoriales Up y
Un paralela y normal a L (figura 2.22b).
Up
Un
u
U
(b)
Figura 2.22
(a) Vector U y línea L.
(b) Descomposición de U en sus componentes
paralela y normal a L.
Componente paralela En términos del ángulo u entre U y la componente
vectorial Up, la magnitud de Up es
ƒ Up ƒ = ƒ U ƒ cos u.
(2.25)
Sea e un vector unitario paralelo a L (figura 2.23). El producto punto de e y U es
L
e # U = ƒ e ƒ ƒ U ƒ cos u = ƒ U ƒ cos u.
Comparando este resultado con la ecuación (2.25) se observa que la magnitud de
Up es
ƒ Up ƒ =
e # U.
u
U
Por lo tanto la componente paralela, o proyección de U en L es
Up = 1e # U2e.
(2.26)
(Esta ecuación se cumple aun si e no apunta en la dirección de Up. En este caso, el
ángulo u 90° y e U es negativo.) Cuando se conocen las componentes de un
vector y las componentes de un vector unitario e paralelo a una línea L, se puede
usar la ecuación (2.26) para determinar la componente del vector paralela a L.
Componente normal Una vez que se ha determinado la componente paralela, se puede obtener la componente vectorial normal mediante la relación
U Up Un:
Un = U - Up.
e
(2.27)
Figura 2.23
El vector unitario e es paralelo a L.
62
Capítulo 2 Vectores
RESULTADOS
Producto punto
El producto punto de dos vectores U y V está definido por
UⴢV UVcos u,
(2.18)
donde u es el ángulo entre los vectores cuando éstos se
colocan cola con cola. Observe que UⴢU U2.
Si U 0 y V 0, UⴢV 0 si y sólo si
U y V son perpendiculares.
V
u
U
Producto punto en términos de componentes
El producto punto de U y V está dado en términos de las
componentes de los vectores por
UⴢV UxVx UyVy UzVz.
(2.23)
Componentes vectoriales paralela y normal a una línea
Un vector U puede descomponerse en una componente vectorial
Up que sea paralela a una línea dada L y una componente
vectorial Un que sea normal a L. Si e es un vector unitario que
es paralelo a L, la componente paralela de U está dada por
(2.26)
Up (eⴢU) e.
La componente normal puede obtenerse de la relación
Un U Up.
Ejemplo activo 2.11
L
Up
Un
u
U
(2.27)
Productos punto ( Relacionado con el problema 2.99)
Las componentes de dos vectores U y V son U 6i – 5j – 3k y V 4i 2j 2k. a) ¿Cuál es el valor de U V b) ¿Cuál es el ángulo entre U y V cuando se colocan cola con cola?
Estrategia
Como se conocen las componentes de U y V, puede usarse la ecuación (2.23) para
determinar el valor de U V. Después se puede emplear la definición del producto
punto, ecuación (2.18), para calcular el ángulo entre los vectores.
2.4 Productos punto
Solución
UⴢV UxVx UyVy UzVz
(6)(4) (5)(2) (3)(2)
8.
63
Use las componentes de los vectores
para determinar el valor de UⴢV.
UⴢV UVcos u,
entonces
UⴢV
cos u
UV
Use la definición de
UⴢV para determinar u.
8
(6)2 (5)2 (3)2
(4)2 (2)2 (2)2
0.195.
Por lo tanto u 78.7.
Problema de práctica Las componentes de dos vectores U y V son U 6i – 5j – 3k
y V Vxi 2j 2k. Determine el valor de la componente Vx tal que los vectores U y
V sean perpendiculares.
Respuesta: Vx = 2.67.
Ejemplo 2.12
Uso del producto punto para determinar un ángulo ( Relacionado con el problema 2.100)
¿Cuál es el ángulo u entre las líneas AB y AC de la figura?
y
C
(8, 8, 4) m
Estrategia
Se conocen las coordenadas de los puntos A, B y C, por lo que es posible determinar las componentes del vector rAB de A a B y del vector rAC de A a C (figura a). Después puede usarse la ecuación (2.24) para determinar u.
u
A
(4, 3, 2) m
Solución
Los vectores rAB y rAC, con las coordenadas en metros son
B
(6, 1, 2) m
x
z
rAB = 16 - 42i + 11 - 32j + 1-2 - 22k = 2i - 2j - 4k 1m2,
rAC = 18 - 42i + 18 - 32j + 14 - 22k = 4i + 5j + 2k 1m2.
y
C
(8, 8, 4) m
rAC
Sus magnitudes son
ƒ rAB ƒ = 212 m22 + 1-2 m22 + 1- 4 m22 = 4.90 m,
ƒ rAC ƒ = 214 m22 + 15 m22 + 12 m22 = 6.71 m.
A
(4, 3, 2) m
u
rAB
B
(6, 1, 2) m
x
El producto punto de rAB y rAC es
rAB # rAC = 12 m214 m2 + 1 -2 m215 m2 + 1- 4 m212 m2 = - 10 m2.
Por lo tanto,
cos u =
rAB # rAC
ƒ rAB ƒ ƒ rAC ƒ
=
-10 m2
= - 0.304.
14.90 m216.71 m2
El ángulo u arccos (–0.304) 107.7°.
Razonamiento crítico
¿Cuál es el significado de que el producto punto de dos vectores sea negativo? De
la ecuación (2.18) y la gráfica del coseno (figura b), puede observarse que el producto punto es negativo, como en este ejemplo, sólo si el ángulo incluido entre los
dos vectores es mayor de 90°.
z
(a) Vectores de posición rAB y rAC.
cos u
1
0
1
0
(b) Gráfica de cos u.
90
u
180
64
Capítulo 2 Vectores
Componentes vectoriales paralela y normal a una línea ( Relacionado con el
Ejemplo 2.13
problema 2.111)
Suponga que usted jala el cable OA que se muestra en la figura ejerciendo una fuerza F de 50 N en O. ¿Cuáles son las componentes vectoriales de F paralela y normal
al cable OB?
y
A
(6, 6, –3) m
Estrategia
F
x
(10, 2, 3) m
O
z
B
Al expresar F como la suma de sus componentes vectoriales paralela y normal a OB
(figura a), es posible determinar éstas usando las ecuaciones (2.26) y (2.27). Sin
embargo, para aplicar tales ecuaciones primero debe expresarse F en términos de sus
componentes escalares y luego determinar las componentes de un vector unitario paralelo a OB. Es posible obtener las componentes de F determinando las componentes del vector unitario que va de O a A y multiplicándolas por F.
Solución
y
Los vectores de posición de O a A y de O a B son (figura b)
rOA = 6i + 6j - 3k 1m2,
A
rOB = 10i - 2j + 3k 1m2.
F
Fn
O
x
Fp
z
Sus magnitudes son rOA 9 m y rOB 10.6 m. Dividiendo estos vectores entre
sus magnitudes se obtienen vectores unitarios que van del origen hacia A y hacia B
(figura c):
B
(a) Componentes de F paralela y normal a OB.
eOA =
eOB =
y
rOA
=
6i + 6j - 3k 1m2
=
10i - 2j + 3k 1m2
ƒ rOA ƒ
rOB
ƒ rOB ƒ
9m
10.6 m
= 0.667i + 0.667j - 0.333k,
= 0.941i - 0.188j + 0.282k.
La fuerza F en términos de sus componentes escalares es
A
(6, 6, 3) m
rOA
F = ƒ F ƒ eOA = 150 N210.667i + 0.667j - 0.333k2
= 33.3i + 33.3j - 16.7k 1N2.
Tomando el producto punto de eOB y F se obtiene
O
x
rOB
(10, 2, 3) m
B
z
(b) Vectores de posición rOA y rOB.
= 20.4 N.
La componente paralela de F es
Fp = 1eOB # F2eOB = 120.4 N210.941i - 0.188j + 0.282k2
= 19.2i - 3.83j + 5.75k 1N2,
y
y la componente normal es
A
Fn = F - Fp = 14.2i + 37.2j - 22.4k 1N2.
eOA
O
x
eOB
z
eOB # F = 10.9412133.3 N2 + 1-0.1882133.3 N2 + 10.28221-16.7 N2
B
(c) Vectores unitarios eOA y eOB.
Razonamiento crítico
¿Cómo se puede confirmar que los dos vectores son perpendiculares? Resulta
claro, de la ecuación (2.18), que el producto punto de dos vectores diferentes de
cero es cero si y sólo si el ángulo incluido entre ellos es 90°. Este diagnóstico
puede usarse para confirmar que las componentes de F determinadas en este ejemplo son perpendiculares. Evaluando el producto punto de Fp y Fn en términos de
sus componentes en newtons, se obtiene
Fp # Fn = 119.22114.22 + 1-3.832137.22 + 15.7521-22.42 = 0.
Problemas
65
Problemas
2.99 En el ejemplo activo 2.11, suponga que el vector V se
cambia a V 4i – 6j – 10k.
a) ¿Cuál es el valor de U V?
b) ¿Cuál es el ángulo entre U y V cuando éstos se colocan cola
con cola?
2.106 Evaluando el producto punto U V, demuestre la identidad cos(u1 – u2) cos u1 cos u2 sen u1 sen u2.
Estrategia: Evalúe el producto punto usando las ecuaciones
(2.18) y (2.23).
y
2.100 En el ejemplo 2.12, suponga que las coordenadas del
punto B se cambian a (6, 4, 4) m. ¿Cuál es el ángulo u entre las
líneas AB y AC?
U
V
u1
2.101 ¿Cuál es el producto punto del vector de posición
r –10i 25j (m) y la fuerza F 300i 250j 300k (N)?
u2
x
Problema 2.106
2.102 Suponga que el producto punto de dos vectores U y V es
U V 0. Si U ≠ 0, ¿qué se sabe acerca del vector V?
2.107 Use el producto punto para determinar el ángulo entre el
cable AB y el cable BC del velero que se muestra en la figura.
2.103 Dos vectores perpendiculares están dados en términos de
sus componentes por U Uxi 4j 6k y V 3i 2j – 3k. Use
el producto punto para determinar la componente Ux.
y
B (4, 13) m
2.104 Los tres vectores
U = Ux i + 3 j + 2k,
V = - 3 i + Vy j + 3k,
W = - 2 i + 4 j + Wz k
son mutuamente perpendiculares. Use el producto punto para determinar las componentes Ux, Vy y Wz.
2.105 Se tienen las magnitudes U 10 y V 20.
a) Use la ecuación (2.18) para determinar U V.
b) Use la ecuación (2.23) para determinar U V.
C
(9, 1) m
A
(0, 1.2) m
x
Problema 2.107
2.108 Determine el ángulo u entre las líneas AB y AC
a) usando la ley de los cosenos (vea el apéndice A);
b) usando el producto punto.
y
V
y
U
B
(4, 3, 1) m
45
30
x
A
Problema 2.105
x
u
z
(5, 1, 3) m
C
Problema 2.108
66
Capítulo 2 Vectores
2.109 El barco O mide las posiciones del barco A y del avión B
y obtiene las coordenadas que se muestran. ¿Qué valor tiene el ángulo u entre las líneas de vista OA y OB?
y
2.112 Una persona ejerce una fuerza F 60i – 40j (N) sobre la
manivela de la máquina para hacer ejercicio que se muestra en la
figura. Use la ecuación (2.26) para determinar la componente de F
que es paralela a la línea que va desde el origen O hasta donde la
persona empuña la manivela.
B
(4, 4, 4) km
150 mm
y
u
x
O
F
O
A
200 mm
z
(6, 0, 3) km
z
250 mm
Problema 2.109
x
2.110 En el trasbordador espacial, los astronautas usan radar
para determinar las magnitudes y los cosenos directores de los
vectores de posición de dos satélites A y B. El vector rA del trasbordador al satélite A tiene una magnitud de 2 km y cosenos directores cos ux 0.768, cos uy 0.384, cos uz 0.512. El vector rB
del trasbordador al satélite B tiene una magnitud de 4 km y cosenos directores cos ux 0.743, cos uy 0.557, cos uz –0.371.
¿Cuál es el ángulo u entre los vectores rA y rB?
Problema 2.112
2.113 En el instante mostrado, el vector de empuje del Harrier es
T 17,000i 68,000j – 8,000k (N) y su vector de velocidad
es 7.3i 1.8j – 0.6k (m/s). La cantidad P 兩Tp兩兩兩, donde
Tp es la componente vectorial de T paralela a v, es la potencia
que en este instante transfiere el motor al avión. Determine el
valor de P.
B
y
rB
x
v
u
A
y
rA
z
T
Problema 2.110
x
Problema 2.113
2.111 En el ejemplo 2.13, si usted cambia su posición y las
coordenadas del punto A donde aplica la fuerza de 50 N se convierten en (8, 3, –3) m, ¿cuál es la componente vectorial de F paralela al cable OB?
Problemas
2.114 Dos cables se extienden de A a B y de A a C. El cable AC
ejerce una fuerza F de 1000 lb en A.
a) ¿Qué valor tiene el ángulo entre los cables AB y AC?
b) Determine la componente vectorial de F paralela al cable AB.
2.115 Sea rAB el vector de posición que va del punto A al punto
B. Determine la componente vectorial de rAB paralela al cable AC.
67
2.117 La cuerda AB ejerce una fuerza T de 50 N sobre el collarín A. Determine la componente vectorial de T que es paralela a la
barra CD.
2.118 En el problema 2.117, determine la componente vectorial
de T que es normal a la barra CD.
y
0.15 m
y
0.4 m
B
(0, 7, 0) pies
A
C
T
F
A
0.2 m 0.3 m
0.5 m
x
O
B
x
0.25 m
D
0.2 m
(0, 0, 10) pies
z
z
C
(14, 0, 14) pies
Problemas 2.117/2.118
Problemas 2.114/2.115
2.116 Se tiene la fuerza F 10i 12j – 6k (N). Determine las
componentes vectoriales de F paralela y normal a la línea OA.
2.119 El disco A está en el punto medio de la superficie inclinada que se muestra en la figura. La cuerda que va de A a B ejerce
una fuerza F de 0.2 lb sobre el disco. Si F se expresa en términos
de las componentes vectoriales paralela y normal a la superficie
inclinada, ¿cuál es la componente normal a la superficie?
y
2.120 En el problema 2.119, ¿cuál es la componente vectorial de
F paralela a la superficie?
A
(0, 6, 4) m
y
F
O
x
B
(0, 6, 0) pies
F
z
Problema 2.116
A
2 pies
x
8 pies
10 pies
z
Problemas 2.119/2.120
68
Capítulo 2 Vectores
2.121 Un astronauta se aproxima a una estación espacial en una
unidad de maniobras. En el instante presente, la estación informa
que la posición relativa del astronauta al origen del sistema coordenado de la estación es rG 50i 80j 180k (m) y su velocidad es v –2.2j – 36k (m/s). La posición de la entrada a un
compartimiento es rA –12i 20k (m). Determine el ángulo
entre el vector de velocidad del astronauta y la línea que va de su
posición a la ubicación de la entrada del compartimiento.
2.122 En el problema 2.121, determine la componente vectorial
de la velocidad del astronauta paralela a la línea desde su posición
hasta la ubicación del compartimiento.
2.123 El punto P se encuentra a 30°W de longitud y a 45°N de
latitud sobre el Océano Atlántico, entre Nueva Escocia y Francia.
El punto Q se encuentra a 60°E de longitud y a 20°N de latitud en
el mar de Arabia. Use el producto punto para determinar la distancia más corta sobre la superficie de la Tierra entre P y Q en términos del radio terrestre RE.
Estrategia: Use el producto punto para determinar el ángulo
entre las líneas OP y OQ; después use la definición de un ángulo en
radianes para determinar la distancia sobre la superficie de la tierra
desde P hasta Q.
y
N
P
Q
45
z
20
O
30
60
G
Ecuador
x
Problemas 2.121/2.122
Problema 2.123
2.5 Productos cruz
ANTECEDENTES
Igual que el producto punto, el producto cruz de dos vectores tiene muchas aplicaciones, entre otras la determinación de la velocidad de rotación de una partícula de
fluido y el cálculo de la fuerza ejercida sobre una partícula cargada por un campo
magnético. Debido a su utilidad en el cálculo de momentos de fuerzas, el producto
cruz es una herramienta indispensable en la mecánica. En esta sección se mostrará
cómo evaluar los productos cruz y se darán ejemplos de aplicaciones sencillas.
Definición
Considere dos vectores U y V (figura 2.24a). El producto cruz de U y V, denotado por U V, se define como
U V UV sen u e.
(2.28)
El ángulo u es el ángulo entre U y V cuando los vectores se colocan cola con cola
(figura 2.24b). El vector e es un vector unitario definido como perpendicular a U
y a V. Como esto implica dos posibles sentidos para e, los vectores U, V y e se
definen como un sistema derecho. En la figura 2.24c se muestra la regla de la
mano derecha para determinar la dirección de e. El pulgar de la mano derecha
apunta hacia e cuando los cuatro dedos restantes, que apuntan hacia el vector U (el
primer vector en el producto cruz), se doblan hacia el vector V (el segundo vector
en el producto cruz).
Debido a que el resultado del producto cruz es un vector, se le suele llamar
también producto vectorial. Las unidades del producto cruz son el producto de las
2.5 Productos cruz
unidades de los dos vectores. Note que el producto cruz de dos vectores diferentes
de cero es igual a cero si y sólo si los dos vectores son paralelos.
Una propiedad interesante del producto cruz consiste en que no es conmutativo. La ecuación (2.28) implica que la magnitud del vector U V es igual a la
magnitud del vector V U, pero la regla de la mano derecha indica que estos vectores son opuestos en dirección (figura 2.25). Esto es,
U * V = - V * U.
El producto cruz no es conmutativo.
y
U
(a)
(2.29)
V
El producto cruz también satisface las relaciones
a 1U * V2 = 1aU2 * V = U * 1aV2
V
El producto cruz es
asociativo con respecto
a la multiplicación
escalar.
U * 1V + W2 = 1U * V2 + 1U * W2
El producto cruz es
distributivo con
respecto a la suma
vectorial.
U
u
(2.30)
(b)
V
(2.31)
U
para todo escalar a y vectores U, V y W cualesquiera.
e
Productos cruz en términos de sus componentes
Para obtener una ecuación para el producto cruz de dos vectores en términos de
sus componentes, se deben determinar los productos cruz formados con los vectores unitarios i, j y k. Como el ángulo entre dos vectores idénticos colocados cola
con cola es igual a cero, se deduce que
i i ii sen (0) e 0.
El producto cruz i j es
(c)
Figura 2.24
(a) Vectores U y V.
(b) Ángulo u entre los vectores cuando se
colocan cola con cola.
(c) Determinación de la dirección de e mediante la regla de la mano derecha.
i j ij sen 90° e e,
donde e es un vector unitario perpendicular a i y j. e k o bien e –k. Aplicando
la regla de la mano derecha, e k (figura 2.26). Por lo tanto,
i * j = k.
UV
V
Continuando de la misma manera se obtiene
i * i = 0,
i * j = k,
i * k = - j,
j * i = - k, j * j = 0,
j * k = i,
k * i = j,
k * j = - i, k * k = 0.
U
(2.32)
Para recordar estos resultados con facilidad, se disponen los vectores en círculo
como se muestra en la figura 2.27a. El producto cruz de vectores adyacentes es
igual al tercer vector con un signo positivo si el orden de los vectores en el producto cruz es el orden indicado por las flechas, y con un signo negativo en caso
contrario. Por ejemplo, en la figura 2.27b se ve que i j k, pero i k j.
El producto cruz de dos vectores U y V expresado en función de sus componentes es
U * V = 1Ux i + Uy j + Uz k2 * 1Vx i + Vy j + Vz k2
= UxVx1i * i2 + UxVy1i * j2 + UxVz1i * k2
+ UyVx1j * i2 + UyVy1j * j2 + UyVz1j * k2
+ UzVx1k * i2 + UzVy1k * j2 + UzVz1k * k2.
V
U
VU
Figura 2.25
Direcciones de U V y V U.
69
70
Capítulo 2 Vectores
Al sustituir la ecuación (2.32) en esta expresión se obtiene la ecuación
y
U * V = 1UyVz - UzVy2i - 1UxVz - UzVx2j
+ 1UxVy - UyVx2k.
j
(2.33)
Este resultado se puede escribir en forma compacta como el determinante
z
k
i
3
U * V = Ux
Vx
i
x
Figura 2.26
La regla de la mano derecha indica que
i j k.
(2.34)
Evaluación de un determinante de 3 ⴛ 3
Un determinante de 3 3 se puede evaluar repitiendo sus dos primeras columnas
y evaluando los productos de los términos en las seis diagonales:
i
3 Ux
Vx
j
Uy
Vy
1 -2 1-2 1-2
k
i
3
Uz Ux
Vz
Vx
j
Uy
Vy
1+2 1+2 1+2
Sumando los términos obtenidos con las diagonales que van de arriba hacia abajo
a la derecha (flechas azules), y restando los términos obtenidos con las diagonales
que van de arriba hacia abajo a la izquierda (flechas negras), se obtiene el valor del
determinante:
k
(a)
i
3 Ux
i
ijk
k
Uz 3 .
Vz
Esta ecuación se basa en las ecuaciones (2.32) que se obtuvo usando un sistema
coordenado derecho. Da el resultado correcto para el producto cruz sólo si se usa
un sistema coordenado derecho para determinar las componentes de U y V.
i
j
j
Uy
Vy
i k j
Vx
j
Uy
Vy
k
Uy Vz i + Uz Vx j + UxVy k
Uz 3 =
-UyVx k - UzVy i - UxVz j.
Vz
Un determinante de 3 3, también puede evaluarse expresándolo como
j
k
i
3 Ux
(b)
Figura 2.27
(a) Disponga los vectores unitarios en un círculo con flechas que indiquen su orden.
(b) El círculo se puede usar para determinar
sus productos cruz.
Vx
j
Uy
Vy
k
U
Uz 3 = i ` y
Vy
Vz
Uz
U
` - j` x
Vz
Vx
Uz
U
` + k` x
Vz
Vx
Uy
`.
Vy
Los términos de la derecha se obtienen multiplicando cada elemento de la primera fila del determinante de 3 3 por el determinante de 2 2 que se obtiene
tachando la columna y la fila en que se encuentra ese elemento. Por ejemplo, el
primer elemento de la primera fila, i, se multiplica por el determinante de 2 2
i
3 Ux
Vx
j
Uy
Vy
k
Uz 3 .
Vz
Recuerde que el segundo término se resta. Desarrollando los determinantes de 2 2
se obtiene el valor del determinante:
i
3 Ux
Vx
j
Uy
Vy
k
Uz 3 = 1UyVz - UzVy2i - 1UxVz - UzVx2j + 1UxVy - UyVx2k.
Vz
Productos triples mixtos
En el capítulo 4, cuando se analice el momento de una fuerza respecto a una línea,
se usará una operación denominada producto triple mixto definido por
U # 1V * W2.
(2.35)
2.5 Productos cruz
71
En términos de las componentes escalares de los vectores,
U # 1V
* W2 = 1Ux i + Uy j
i
+ Uz k2 # 3 Vx
Wx
j
Vy
Wy
k
Vz 3
Wz
= 1Ux i + Uy j + Uz k2 # [1VyWz - VzWy2i
- 1VxWz - VzWx2j + 1VxWy - VyWx2k]
= Ux1VyWz - VzWy2 - Uy1VxWz - VzWx2
+ Uz1VxWy - VyWx2.
Este resultado se puede expresar como el determinante
U # 1V
Ux
3
* W2 = Vx
Wx
Uy
Vy
Wy
Uz
Vz 3 .
Wz
(2.36)
V
Si se intercambian dos vectores cualesquiera en el producto triple mixto, se cambia el signo pero no el valor absoluto del resultado. Por ejemplo,
U # 1V
* W2 =
- W # 1V
U
W
* U2.
Si los vectores U, V y W en la figura 2.28 forman un sistema derecho, puede
demostrarse que el volumen del paralelepípedo es igual a U (V W).
Figura 2.28
Paralelepípedo definido por los vectores U, V
y W.
RESULTADOS
Producto Cruz
El producto cruz de dos vectores U y V está definido por
U V 兩U兩兩V兩sen u e.
Producto cruz en términos de sus componentes
El producto cruz de U y V está dado en términos de
las componentes de los vectores como
U V (UyVz UzVy)i (UxVz UzVx)j
i
Ux
j
k
Uy
Uz
Vx
Vy
Vz
u
U
(2.28)
Como en el producto punto, u es el ángulo entre los vectores
cuando éstos se colocan cola con cola. El vector unitario e
se define perpendicular a U, perpendicular a V, y dirigido de
tal manera que U, V, e forman un sistema derecho. Si
兩U兩 0 y 兩V兩 0, U V 0 si y sólo si U y V son
paralelos.
(UxVy UyVx)k
V
(2.33)
(2.34)
V
U
e
72
Capítulo 2 Vectores
Producto triple mixto
La operación Uⴢ(V W) se llama el producto triple mixto de
los vectores U, V y W. Puede expresarse en términos de las
componentes de los vectores mediante el determinante
Ux
Uⴢ(V W) Vx
Uy
Uz
Vy
Vz .
(2.36)
Wx Wy Wz
V
Cuando U, V, W forman un sistema
derecho, el volumen del paralelepípedo
mostrado es igual a Uⴢ(V W).
U
W
Ejemplo activo 2.14
Productos cruz ( Relacionado con el problema 2.124)
Las componentes de dos vectores U y V son U 6i 5j k y V 4i 2j 2k.
a) Determine el producto cruz U V. b) Use el producto punto para probar que
U V es perpendicular a U.
Estrategia
a) Como se conocen las componentes de U y V, se puede usar la ecuación (2.33) para
determinar U V. b) Una vez determinadas las componentes del vector U V,
puede probarse que éste es perpendicular a U al demostrar que (U V) U 0.
Solución
U V (UyVz UzVy)i (UxVz UzVx)j
(UxVy UyVx)k
[(5)(2) (1)(2)]i [(6)(2) (1)(4)]j
[(6)(2) (5)(4)]k
8i 16j 32k.
(a) Use las componentes de los
vectores para determinar U V.
(U V)ⴢU (U V)x Ux (U V)y Uy (U V)z Uz
(8)(6) (16)(5) (32)(1)
0.
(b) Demuestre que (U V)ⴢU 0.
Problema de práctica Las componentes de dos vectores U y V son U 3i 2j k
y V 5i 3j 4k. Determine las componentes de un vector unitario que sea perpendicular a U y perpendicular a V.
Respuesta: e 0.477i 0.304j 0.825k o bien e 0.477i 0.304j 0.825k.
2.5 Productos cruz
Ejemplo 2.15
Distancia mínima de un punto a una línea ( Relacionado con el problema 2.133)
Considere las líneas rectas OA y OB de la figura.
a) Determine las componentes de un vector unitario que sea perpendicular a OA y
OB.
b) ¿Cuál es la distancia mínima del punto A a la línea OB?
y
B
(6, 6, 3) m
Estrategia
a) Sean rOA y rOB los vectores de posición de O a A y de O a B (figura a). Como el
producto cruz rOA rOB es perpendicular a rOA y a rOB, dicho producto será determinado para después dividirlo entre su magnitud para obtener un vector unitario
perpendicular a las líneas OA y OB.
b) La distancia mínima de A a la línea OB es la longitud d de la línea recta que va
desde A hasta OB que es perpendicular a OB (figura b). Se puede ver que d rOA
sen u, donde u es el ángulo entre rOA y rOB. De la definición del producto cruz, la
magnitud de rOA rOB, es rOArOB sen u, por lo que es posible determinar d dividiendo la magnitud rOA rOB entre la magnitud de rOB.
O
x
A (10, 2, 3) m
z
y
B
rOB
Solución
a) Las componentes de rOA y rOB son
rOA = 10i - 2j + 3k 1m2,
rOB = 6i + 6j - 3k 1m2.
O
rOA
Usando la ecuación (2.34) se obtiene rOA rOB:
rOA * rOB
i
3
= 10
6
j
-2
6
x
A
z
k
3 3 = - 12i + 48j + 72k 1m22.
-3
(a) Vectores rOA y rOB.
y
B
Este vector es perpendicular a rOA y a rOB. Al dividirlo entre su magnitud se obtiene un vector unitario e que es perpendicular a las líneas OA y OB:
e =
rOA * rOB
ƒ rOA * rOB ƒ
=
rOB
-12i + 48j + 72k 1m22
21-12 m222 + 148 m222 + 172 m222
u
= - 0.137i + 0.549j + 0.824k.
rOA
b) De la figura (b) se sabe que la distancia mínima d es
z
d rOA sen u.
rOA rOB rOArOB sen u.
Despejando sen u de esta ecuación se obtiene que la distancia d es
=
ƒ rOA * rOB ƒ
ƒ rOA * rOB ƒ
b =
ƒ rOA ƒ ƒ rOB ƒ
ƒ rOB ƒ
21-12 m222 + 148 m222 + 172 m222
216 m22 + 16 m22 + 1-3 m22
A
(b) Distancia mínima d de A a la
línea OB.
La magnitud de rOA rOB es
d = ƒ rOA ƒ a
d
O
= 9.71 m.
Razonamiento crítico
Este ejemplo es una ilustración del poder de los métodos vectoriales. La determinación de la distancia mínima del punto A a la línea OB puede formularse como un
problema de minimización en cálculo diferencial, pero la solución vectorial que se
presenta aquí es mucho más simple.
x
73
74
Capítulo 2 Vectores
Componente de un vector perpendicular a un plano ( Relacionado con el problema 2.139)
Ejemplo 2.16
E
y
(0.2, 0.4, 0.1) m
La cuerda CE que se muestra en la figura ejerce una fuerza T de 500 N sobre la puerta ABCD. ¿Cuál es la magnitud de la componente de T perpendicular a la puerta?
Estrategia
T
D
C
(0, 0.2, 0) m
(0.5, 0, 0) m
A
x
B
(0.35, 0, 0.2) m
z
Se dan las coordenadas de las esquinas A, B, y C de la puerta. Si se toma el producto
cruz del vector de posición rCB de C a B y el vector de posición rCA desde C hasta
A, se obtendrá un vector que es perpendicular a la puerta. Se puede dividir el vector resultante entre su magnitud para obtener un vector unitario perpendicular a la
puerta y después aplicar la ecuación (2.26) para determinar la componente de T
perpendicular a la puerta.
Solución
Las componentes de rCB y rCA son
rCB = 0.35i - 0.2j + 0.2k 1m2,
rCA = 0.5i - 0.2j 1m2.
Su producto cruz es
y
e
rCB * rCA
D
C
rCA
rCB
A
x
(a) Determinación de un vector unitario perpendicular a la puerta
j
- 0.2
- 0.2
k
0.2 3 = 0.04i + 0.1j + 0.03k 1m22.
0
Al dividir este vector entre su magnitud, se obtiene un vector e unitario que es perpendicular a la puerta (figura a):
B
z
i
3
= 0.35
0.5
e =
rCB * rCA
=
ƒ rCB * rCA ƒ
0.04i + 0.1j + 0.03k 1m22
210.04 m222 + 10.1 m222 + 10.03 m222
= 0.358i + 0.894j + 0.268k.
Para usar la ecuación (2.26) es necesario expresar T en términos de sus componentes escalares. El vector de posición de C a E es
rCE = 0.2i + 0.2j - 0.1k 1m2,
entonces, la fuerza T puede expresarse como
T = ƒTƒ
rCE
ƒ rCE ƒ
= 1500 N2
0.2i + 0.2j - 0.1k 1m2
210.2 m22 + 10.2 m22 + 1- 0.1 m22
= 333i + 333j - 167k 1N2.
La componente de T paralela al vector unitario e, que es la componente de T perpendicular a la puerta, es
1e # T2e = [10.35821333 N2 + 10.89421333 N2 + 10.26821- 167 N2]e
= 373e 1N2.
La magnitud de la componente de T perpendicular a la puerta es 373 N.
Razonamiento crítico
¿Por qué resulta útil determinar la componente de la fuerza T perpendicular a la
puerta? Si el eje y es vertical y la cuerda CE es lo único que evita que la puerta
caiga, puede verse de manera intuitiva que es la componente de la fuerza perpendicular a la puerta la que la mantiene en su lugar. En el capítulo 5 se analizan problemas de este tipo.
Problemas
75
Problemas
2.124 En el ejemplo activo 2.14, suponga que el vector V
se cambia a V 4i 6j 10k. a) Determine el producto cruz
U V. b) Use el producto punto para probar que U V es perpendicular a V.
2.125 Se tienen los vectores U 3i 2j y V 2i 4j.
a) ¿Qué valor tiene el producto cruz U V?
b) ¿Qué valor tiene el producto cruz V U?
2.130 Se tienen las magnitudes U 10 y V 20.
a) Use la definición del producto cruz para determinar U V.
b) Use la definición del producto cruz para determinar V U.
c) Use la ecuación (2.34) para determinar U V.
d) Use la ecuación (2.34) para determinar V U.
y
V
U
2.126 Los dos segmentos de la barra en forma de L que se
muestra en la figura son paralelos a los ejes x y z. La cuerda AB
ejerce una fuerza de magnitud F 500 lb sobre la barra en A.
Determine el producto cruz rCA F, donde rCA es el vector de
posición del punto C al punto A.
30
45
x
2.127 Los dos segmentos de la barra en forma de L que se
muestra en la figura son paralelos a los ejes x y z. La cuerda AB
ejerce una fuerza de magnitud F 500 lb sobre la barra en A.
Determine el producto cruz rCB F, donde rCB es el vector de
posición del punto C al punto B. Compare su respuesta con la que
obtuvo para el problema 2.126.
Problema 2.130
2.131 Se tiene la fuerza F 10i 4j (N). Determine el producto cruz rAB F.
y
(6, 3, 0) m
y
A
4 pies
rAB
C
x
z
(6, 0, 4) m
B
5 pies
F
4 pies
A
x
Problema 2.131
F
B
z
(6, 0, 4) pies
Problemas 2.126/2.127
2.128 Suponga que el producto cruz de dos vectores U y V es
U V 0. Si U 0, ¿qué se sabe acerca del vector V?
2.129 El producto cruz de dos vectores U y V es U V 30i
40k. El vector V 4i 2j 3k. El vector U 4i Uy j Uz k. Determine Uy y Uz.
2.132 Demuestre la identidad sen (u1 u2) sen u1 cos u2 cos u1 sen u2, evaluando el producto cruz U V.
y
U
V
u1
u2
x
Problema 2.132
2.133 En el ejemplo 2.15, ¿cuál es la distancia mínima del
punto B a la línea OA?
76
Capítulo 2 Vectores
2.134 a) ¿Cuál es el producto cruz rOA rOB? b) Determine un
vector unitario e que sea perpendicular a rOA y rOB.
2.138 La cuerda AB ejerce una fuerza T de 50 N sobre el collarín en A. Sea rCA el vector de posición del punto C al punto A. Determine el producto cruz rCA T.
2.135 Use el producto cruz para determinar la longitud de la
línea recta más corta del punto B a la línea recta que pasa a través
de los puntos O y A.
y
0.15 m
y
B (4, 4, 4) m
0.4 m
B
C
T
rOB
0.2 m
A
O
0.5 m
x
O
rOA
x
D
A (6, 2, 3) m
z
0.3 m
0.25 m
0.2 m
z
Problemas 2.134/2.135
Problema 2.138
2.136 El cable BC ejerce una fuerza F de 1000 lb sobre el gancho en B. Determine rAB F.
y
2.139 En el ejemplo 2.16, suponga que el punto de unión E se
mueve a la ubicación (0.3, 0.3, 0) m y la magnitud de T se incrementa a 600 N. ¿Cuál es la magnitud de la componente de T perpendicular a la puerta?
B
F
6 pies
rAB
x
8 pies
C
2.140 La barra AB tiene 6 metros de largo y es perpendicular a las
barras AC y AD. Use el producto cruz para determinar las coordenadas xB, yB y zB del punto B.
rAC
4 pies
4
pies
12 pies
A
y
B
z
(xB, yB, zB)
Problema 2.136
2.137 El vector de fuerza F apunta a lo largo de una línea recta
desde el punto A hasta el punto B. Su magnitud es 兩F兩 20 N. Las
coordenadas de los puntos A y B son xA 6 m, yA 8 m, zA 4 m
y xB 8 m, yB 1 m, zB 2 m.
a) Exprese el vector F en términos de sus componentes.
b) Use la ecuación (2.34) para determinar los productos cruz rA F y rB F.
(0, 3, 0) m
A
y
A
D
F
C
(0, 0, 3) m
z
Problema 2.140
B
rA
rB
x
z
Problema 2.137
(4, 0, 0) m
x
Problemas de repaso
2.141* Determine la distancia mínima del punto P al plano definido por los tres puntos A, B y C.
y
B (0, 5, 0) m
P
(9, 6, 5) m
A
(3, 0, 0) m
C
77
2.143 Para los vectores u 6i 2j 4k, V 2i 7j y W 3i 2k, evalúe los siguientes productos triples mixtos:
a) U # 1V * W2;
b) W # 1V * U2;
c) V # 1W * U2.
2.144 Use el producto triple mixto para calcular el volumen del
paralelepípedo.
x
y
(0, 0, 4) m
z
Problema 2.141
(140, 90, 30) mm
2.142* El vector de fuerza F apunta en dirección de la línea recta
que va del punto A al punto B. Use las ecuaciones (2.28)(2.31)
para demostrar que
(200, 0, 0) mm
x
rB * F = rA * F.
Estrategia: Sea rAB el vector de posición del punto A al punto
B. Exprese rB en términos de rA y rAB. Observe que los vectores
rAB y F son paralelos.
y
(160, 0, 100) mm
z
Problema 2.144
2.145 Usando las ecuaciones (2.23) y (2.24) demuestre que
A
F
rA
Ux
U # 1V * W2 = 3 Vx
Wx
B
Uy
Vy
Wy
Uz
Vz 3 .
Wz
rB
x
z
2.146 Los vectores U i Uy j 4k, V 2i j 2k, y
W –3i j 2k son coplanares (se encuentran en el mismo
plano). ¿Qué valor tiene la componente Uy?
Problema 2.142
Problemas de repaso
2.147 En la figura, la magnitud de F es de 8 kN. Exprese F en
términos de sus componentes escalares.
y
2.148 La magnitud de la fuerza vertical W que se muestra es
de 600 lb y la magnitud de la fuerza B es de 1500 lb. Si A B W 0, determine la magnitud de la fuerza A y el ángulo a.
(3, 7) m
F
W
(7, 2) m
B
x
Problema 2.147
50
a
A
Problema 2.148
78
Capítulo 2 Vectores
2.149 La magnitud del vector de fuerza vertical A es de 200 lb.
Si A B C 0, ¿qué valor tienen las magnitudes de los vectores fuerza B y C?
2.150 La magnitud del vector de fuerza horizontal D es de 280 lb.
Si D E F 0, ¿qué valor tienen las magnitudes de los vectores fuerza E y F?
70 pulg
2.157 a) Escriba el vector de posición rAB del punto A al punto B
en términos de sus componentes.
b) El vector R tiene magnitud R200 lb y es paralela a la línea
que va de A a B. Determine el vector R en términos de sus componentes.
2.158 La cuerda que se muestra en la figura ejerce una fuerza de
magnitud F 200 lb sobre la parte superior del poste en B.
a) Determine el vector rAB F, donde rAB es el vector de posición
de A a B.
100 pulg
b) Determine el vector rAC F, donde rAC es el vector de posición de A a C.
50 pulg
E
C
y
B (5, 6, 1) pies
D
B
F
A
F
Problemas 2.149/2.150
Para resolver los problemas 2.151 a 2.157 consulte el
siguiente diagrama.
A
x
C (3, 0, 4) pies
y
z
A
(4, 4, 2) pies u
F 20i 10j 10k (lb)
B (8, 1, 2) pies
x
z
Problema 2.158
2.159 El poste que soporta el letrero es paralelo al eje x y tiene 6
pies de longitud. El punto A está contenido en el plano y–z. a) Exprese el vector r en términos de sus componentes. b) ¿Cuál es el
valor de los cosenos directores de r?
Problemas 2.151–2.157
y
2.151 ¿Qué valor tienen los cosenos directores de F?
A
2.152 Determine las componentes de un vector unitario paralelo
a la línea AB que apunta desde A hacia B.
Cataratas
Bedford
r
2.153 ¿Qué valor tiene el ángulo u entre AB y la fuerza F.
45
60
2.154 Determine la componente vectorial de F paralela a la
línea AB.
O
2.155 Determine la componente vectorial de F que es normal a
la línea AB.
2.156 Determine el vector rBA F, donde rBA es el vector de posición de B a A.
z
Problema 2.159
x
Problemas de repaso
2.160 La componente z del vector de fuerza F es de 80 lb. a) Exprese F en términos de sus componentes. b) ¿Cuáles son los ángulos ux, uy y uz entre F y los ejes coordenados positivos?
y
79
2.164 La magnitud de la fuerza vertical W es de 160 N.
Los cosenos directores del vector de posición de A a B son
cos ux 0.500, cos uy 0.866 y cos uz 0, y los cosenos
directores del vector de posición de B a C son cos ux 0.707,
cos uy 0.619 y cos uz 0.342. El punto G es el punto medio
de la línea de B a C. Determine el vector rAG W, donde rAG es
el vector de posición de A a G.
F
x
m
y
20
O
0m
C
60
60
G
A
B
W
z
600 mm
Problema 2.160
2.161 La magnitud del vector de fuerza FB es de 2 kN. Expréselo
en función de sus componentes escalares.
A
2.162 La magnitud del vector de fuerza vertical F es de 6 kN.
Determine las componentes vectoriales de F paralela y normal a la
línea que va de B a D.
z
x
2.163 La magnitud del vector de fuerza vertical F es de 6 kN.
Dado que F FA FB FC 0, ¿cuáles son las magnitudes de
FA, FB y FC?
2.165 La cuerda CE ejerce una fuerza T de 500 N sobre la puerta con bisagras que se muestra en la figura.
y
F
D
a) Exprese T en términos de sus componentes.
(4, 3, 1) m
b) Determine la componente vectorial de T que es paralela a la
línea que va del punto A al punto B.
FC
FA
Problema 2.164
FB
A
C
z
2.166 En el problema 2.165, sea rBC el vector de posición del
punto B al punto C. Determine el producto cruz rBC T.
x
(6, 0, 0) m
B
E
(0.2, 0.4, 0.1) m
(5, 0, 3) m
y
Problemas 2.161–2.163
T
D
C
(0, 0.2, 0) m
A (0.5, 0, 0) m
B
(0.35, 0, 0.2) m
z
Problemas 2.165/2.166
x
CAPÍTULO
3
Fuerzas
En el capítulo 2 se representaron fuerzas con vectores y se usó la
adición vectorial para sumarlas. En este capítulo se analizarán
con mayor detalle las fuerzas y se presentarán dos de los conceptos más importantes de la mecánica: el equilibrio y el diagrama de cuerpo libre. Se usarán los diagramas de cuerpo libre para
identificar las fuerzas sobre cuerpos y se empleará el equilibrio
para determinar fuerzas desconocidas.
Las fuerzas debidas al peso del puente se transfieren a las torres verticales
de soporte mediante cables. En este capítulo se usan diagramas de cuerpo
libre para analizar las fuerzas que actúan sobre objetos en equilibrio.
82
Capítulo 3 Fuerzas
3.1 Fuerzas, equilibrio y diagramas de cuerpo libre
ANTECEDENTES
El concepto de fuerza resulta muy familiar, como se evidencia con palabras del
tipo de empujar, jalar y elevar que se usan en las conversaciones diarias. En ingeniería se trata con muchos tipos de fuerzas en un gran intervalo de magnitudes. En
esta sección se definen algunos términos usados para describir fuerzas, se analizan
fuerzas particulares que ocurren con frecuencia en aplicaciones de ingeniería y se
introducen los conceptos de equilibrio y diagrama de cuerpo libre.
Línea de
acción
de F
F
Terminología
Línea de acción Cuando una fuerza se representa mediante un vector, la línea
recta colineal al vector se denomina línea de acción de la fuerza (figura 3.1).
Figura 3.1
Una fuerza F y su línea de acción.
Sistemas de fuerzas Un sistema de fuerzas es simplemente un conjunto particular de fuerzas. Un sistema de fuerzas es coplanar o bidimensional si las líneas
de acción de las fuerzas residen en un plano; de otra manera, se trata de un sistema tridimensional. Un sistema de fuerzas es concurrente si las líneas de acción de
las fuerzas se encuentran en un punto (figura 3.2a) y es paralelo si las líneas de acción
son paralelas (figura 3.2b).
Fuerzas externas e internas Se dice que un objeto dado está sometido a una
fuerza externa si ésta es ejercida por otro objeto. Cuando una parte de un objeto
está sometida a una fuerza por otra parte del mismo cuerpo, se dice que está sujeta a una fuerza interna. Estas definiciones requieren que se precise con claridad
el cuerpo que se está considerando. Por ejemplo, si supone que usted es el cuerpo, cuando está de pie, el piso —que es un cuerpo diferente— ejerce una fuerza
externa sobre sus pies, y si aprieta sus manos, su mano izquierda ejerce una fuerza interna sobre su mano derecha. Sin embargo, si su mano derecha es el cuerpo
en consideración, la fuerza ejercida por su mano izquierda es una fuerza externa.
Fuerzas de cuerpo y de superficie Una fuerza ejercida sobre un cuerpo se
denomina fuerza de cuerpo si actúa sobre el volumen del cuerpo y fuerza de superficie si actúa sobre su superficie. La fuerza gravitatoria sobre un cuerpo es una
fuerza de cuerpo; una fuerza de superficie se puede ejercer sobre un cuerpo
mediante su contacto con otro cuerpo. Las fuerzas de cuerpo y de superficie pueden ser resultado de efectos electromagnéticos.
Fuerzas gravitatorias
Cuando se levanta algo pesado se percibe la fuerza ejercida sobre un objeto por la
gravedad de la Tierra. La fuerza gravitatoria o peso de un objeto puede representarse mediante un vector (figura 3.3).
FA
FB
FC
Figura 3.2
(a) Fuerzas concurrentes.
(b) Fuerzas paralelas.
(a)
FA FB
FC
(b)
FD
W
Figura 3.3
Representación del peso de un objeto mediante
un vector.
3.1 Fuerzas, equilibrio y diagramas de cuerpo libre
Figura 3.4
(a) Al empujar una pared, se ejerce una fuerza
de contacto sobre ella.
(b) El vector F representa la fuerza que se
ejerce sobre la pared.
(c) La pared ejerce una fuerza F sobre la
mano.
F
F
(a)
(b)
83
(c)
La magnitud del peso de un objeto se relaciona con su masa m por la fórmula
(3.1)
ƒ W ƒ = mg,
donde g es la aceleración debida a la gravedad al nivel del mar. Se usarán los valores g 9.81 m/s2 en unidades SI y g 32.2 pies/s2 en unidades de uso común en
Estados Unidos.
Las fuerzas gravitatorias, y también las electromagnéticas, actúan a distancia.
Los objetos sobre los que actúan no necesitan estar en contacto con los objetos que
ejercen las fuerzas. En la sección siguiente se analizarán fuerzas que resultan del
contacto entre objetos.
Fuerzas de contacto
Las fuerzas de contacto son las que resultan del contacto entre objetos, por
ejemplo, al empujar una pared (figura 3.4a). La superficie de la mano ejerce una
fuerza sobre la superficie de la pared que se puede representar con un vector F
(figura 3.4b). La pared ejerce una fuerza igual y opuesta F sobre la mano (figura 3.4c) (recuerde la tercera ley de Newton: las fuerzas ejercidas entre sí por dos
partículas cualesquiera son iguales en magnitud y opuestas en dirección; si le
queda duda de que la pared ejerce una fuerza sobre la mano, intente empujar la
pared usando patines).
Se tratará con fuerzas de contacto ejercidas sobre objetos mediante el contacto con las superficies de otros cuerpos y por medio de cuerdas, cables y resortes.
Superficies Considere dos superficies planas en contacto (figura 3.5a). La
fuerza ejercida sobre la superficie derecha por la superficie izquierda se representa con el vector F en la figura 3.5b. Es posible separar F en una componente N normal a la superficie y una componente f paralela a ésta (figura 3.5c). La
componente N se denomina fuerza normal y la componente f se denomina fuerza de
fricción. En ocasiones se supone que la fuerza de fricción entre dos superficies
es insignificante respecto a la fuerza normal; dicha condición se describe al decir
que las superficies son lisas. En este caso se muestra sólo la fuerza normal
(figura 3.5d). Cuando la fuerza de fricción no se puede despreciar, se dice que
las superficies son rugosas.
N
N
f
F
(a)
(b)
(c)
(d)
Figura 3.5
(a) Dos superficies planas en contacto.
(b) La fuerza F ejercida sobre la superficie
derecha.
(c) La fuerza F se separa en sus componentes
normal y paralela a la superficie.
(d) Sólo se muestra la fuerza normal cuando
la fricción es insignificante.
84
Capítulo 3 Fuerzas
N
Figura 3.6
(a) Superficies curvas en contacto. La línea
discontinua indica el plano tangente a las
superficies en su punto de contacto.
(b) Fuerza normal y fuerza de fricción sobre
la superficie derecha.
f
(a)
(b)
Si las superficies en contacto son curvas (figura 3.6a), la fuerza normal y la
fuerza de fricción son, respectivamente, perpendicular y paralela al plano tangente a las superficies en su punto común de contacto (figura 3.6b).
Cuerdas y cables Una fuerza de contacto puede ejercerse sobre un objeto
uniendo una cuerda o un cable al cuerpo y tirando de él. En la figura 3.7a, el cable
de la grúa está unido a un contenedor de materiales de construcción. La fuerza que
el cable ejerce sobre el contenedor se puede representar mediante un vector T
(figura 3.7b). La magnitud de T se denomina tensión en el cable y la línea de
acción de T es colineal al cable. El cable ejerce una fuerza igual y opuesta T
sobre la grúa (figura 3.7c).
Observe que se ha supuesto que el cable es recto y que la tensión donde el cable
se conecta al contenedor es igual a la tensión cerca de la grúa. Esto es aproximadamente cierto si el peso del cable es pequeño en comparación con la tensión. En caso
contrario, el cable se pandeará en forma considerable y la tensión variará a través de
su longitud. En el capítulo 9 se analizarán cuerdas y cables cuyos pesos no son
pequeños en comparación con sus tensiones. Por ahora se supondrá que las cuerdas
y los cables son rectos y que sus tensiones son constantes a través de sus longitudes.
Una polea es una rueda con un borde ranurado que puede usarse para cambiar la dirección de una cuerda o un cable (figura 3.8a). Por ahora se supondrá
T
(b)
T
(a)
(c)
Figura 3.7
(a) Grúa con su cable unido a un contenedor.
(b) Fuerza T ejercida por el cable sobre el contenedor.
(c) Fuerza T ejercida por el cable sobre la grúa.
3.1 Fuerzas, equilibrio y diagramas de cuerpo libre
85
|T1| |T2|
T1
Figura 3.8
(a) Una polea cambia la dirección de una
cuerda o un cable.
(b) Por ahora, se debe suponer que las
tensiones a cada lado de la polea son
iguales.
T2
(a)
(b)
Resorte
Amortiguador
Resorte
Figura 3.9
Resortes en la suspensión de un auto. El
dispositivo de la derecha se llama soporte
MacPherson.
Amortiguador
que la tensión es la misma en ambos lados de una polea (figura 3.8b). Esto es
cierto, o al menos aproximadamente cierto, cuando la polea puede girar libremente y la cuerda o el cable es estacionario, o cuando se hace girar la polea a
una velocidad constante.
Resortes Los resortes se usan para ejercer fuerzas de contacto en dispositivos
mecánicos, por ejemplo en la suspensión de vehículos (figura 3.9). Considere un
resorte cuya longitud no elongada 6, es decir la longitud del resorte cuando sus
extremos están sueltos, es L0 (figura 3.10a). Cuando el resorte se elonga, una longitud L mayor que L0 (figura 3.10b) tirará del objeto al que está unido con una
fuerza F (figura 3.10c). El objeto ejerce una fuerza igual y opuesta F sobre el
resorte (figura 3.10d). Cuando el resorte se comprime una longitud L menor que
L0 (figuras 3.1la, b), empuja al objeto con una fuerza F y el objeto ejerce una fuerza igual y opuesta F sobre el resorte (figuras 3.1lc, d). Si el resorte se comprime demasiado, puede pandearse (figura 3.11e). Un resorte diseñado para ejercer
una fuerza al comprimirse suele tener un soporte lateral para evitar el pandeo; por
ejemplo, se puede encerrar en un cilindro. En las suspensiones de automóviles
mostradas en la figura 3.9, los amortiguadores dentro del resorte impiden que éste
se pandee.
La magnitud de la fuerza ejercida por un resorte depende del material con el
que fue hecho, su diseño y de cuánto varía con respecto a su longitud original.
Cuando el cambio de longitud no es muy grande en comparación con la longitud
no elongada, los resortes que suelen usarse en dispositivos mecánicos ejercen una
fuerza aproximadamente proporcional al cambio de longitud:
ƒ F ƒ = k ƒ L - L0 ƒ .
(3.2)
L0
(a)
L
(b)
F
(c)
F
(d)
Figura 3.10
(a) Resorte de longitud no elongada L 0.
(b) El resorte elongado a una longitud
L L 0.
(c, d) Fuerza F ejercida por el resorte y fuerza
F ejercida sobre el resorte.
86
Capítulo 3 Fuerzas
Como la fuerza es una función lineal del cambio de longitud (figura 3.12), un
resorte que cumple con esta relación se denomina resorte lineal. El valor de la
constante del resorte k depende de su material y diseño. Sus dimensiones son
(fuerza)/(longitud). Observe en la ecuación (3.2) que k es igual a la magnitud de la
fuerza requerida para estirar o comprimir el resorte una unidad de longitud.
Suponga que la longitud sin elongar de un resorte es L0 1 m y k 3000
N/m. Si el resorte se elonga hasta alcanzar una longitud L 1.2 m, la magnitud
de la fuerza de tensión que ejerce es
L0
(a)
L
(b)
k ƒ L - L0 ƒ = 300011.2 - 12 = 600 N.
Aunque es cierto que los resortes se utilizan comúnmente en dispositivos
mecánicos, también despiertan el interés por una razón diferente: pueden usarse
para modelar situaciones en que las fuerzas dependen de los desplazamientos. Por
ejemplo, la fuerza necesaria para flexionar la viga de acero de la figura 3.13(a) es
una función lineal del desplazamiento d, o bien
F
(c)
ƒ F ƒ = kd,
F
si d no es muy grande. Por consiguiente, es posible modelar el comportamiento
fuerza-deflexión de la viga como un resorte lineal (figura 3.13b).
(d)
Equilibrio
(e)
Figura 3.11
(a) Resorte de longitud L0.
(b) El resorte comprimido a una longitud
L L 0.
(c, d) El resorte empuja a un objeto con una
fuerza F y el objeto ejerce una fuerza
F sobre el resorte.
(e) Un resorte se pandeará si se comprime
demasiado.
En la conversación diaria, equilibrio significa un estado invariable, una estabilización. Antes de establecer con precisión qué significa este término en mecánica, se
considerarán algunos ejemplos familiares. Si usted se encuentra dentro de una construcción mientras lee esto, los objetos que observa a su alrededor y que están en
reposo (estacionario) en relación con la construcción, como adornos o muebles,
están en equilibrio. Una persona sentada o parada en reposo en relación con la
construcción también está en equilibrio. Si un tren viaja a velocidad constante
en una trayectoria recta, los objetos que están en reposo con respecto al tren, como un
pasajero sentado o una persona de pie en el pasillo (figura 3.14a), se encuentran en
equilibrio. La persona en reposo relativo a la construcción y el pasajero de pie en el
pasillo del tren no experimentan aceleración. Sin embargo, si el tren aumenta o
d
d
F
k
(b)
兩F兩
k
1
兩L L0兩
Figura 3.12
La gráfica de la fuerza ejercida por un resorte
lineal en función de su elongación o contracción es una línea recta con pendiente k.
(a)
Figura 3.13
(a) Viga de acero flexionada por una fuerza.
(b) Modelado del comportamiento de la viga mediante un resorte lineal.
F
3.1 Fuerzas, equilibrio y diagramas de cuerpo libre
disminuye su velocidad, la persona de pie en el pasillo ya no estará en equilibrio
y podría perder su estabilidad (figura 3.14b).
Se define que un objeto está en equilibrio sólo si cada punto del objeto tiene
la misma velocidad constante, lo cual se denomina traslación uniforme. La velocidad debe medirse con respecto a un marco de referencia en el que sean válidas
las leyes de Newton. Tal marco se llama marco de referencia newtoniano o inercial. En muchas aplicaciones de ingeniería, un marco de referencia que esté fijo
con respecto a la Tierra puede verse como inercial. Por lo tanto, puede suponerse que los objetos en traslación uniforme con respecto a la Tierra están en equilibrio. A lo largo del presente libro se parte de este supuesto. En los ejemplos que
se citaron en el párrafo anterior, los muebles y la persona en reposo dentro de una
construcción, así como el pasajero sentado y la persona de pie dentro del tren
que se mueve a velocidad constante, están en translación uniforme con respecto
a la Tierra y por ende están en equilibrio.
La suma vectorial de las fuerzas externas que actúan sobre un objeto en equilibrio es igual a cero. Se usará el símbolo 兺F para denotar la suma de las fuerzas
externas. Así, cuando un objeto está en equilibrio,
©F = 0.
87
(a)
(3.3)
En algunas situaciones, esta ecuación de equilibrio puede usarse para determinar
fuerzas desconocidas que actúan sobre un cuerpo en equilibrio. El primer paso
consiste en dibujar un diagrama de cuerpo libre del objeto para identificar las
fuerzas externas que actúan sobre el cuerpo.
Diagramas de cuerpo libre
(b)
Figura 3.14
(a) Mientras el tren se mueve a velocidad
constante, una persona de pie en el pasillo
está en equilibrio.
(b) Si el tren acelera, la persona lo pierde.
Un diagrama de cuerpo libre sirve para enfocar la atención en el cuerpo de interés
y ayuda a identificar las fuerzas externas que actúan sobre él. Aunque en estática
interesarán sólo cuerpos en equilibrio, los diagramas de cuerpo libre se usan en
dinámica para analizar los movimientos de los objetos.
Aunque es una de las herramientas más importantes en mecánica, el diagrama de cuerpo libre es un concepto sencillo. Es el dibujo de un objeto y de las
fuerzas externas que actúan sobre él, sin incluir nada además del cuerpo de interés. El dibujo muestra el cuerpo aislado o liberado de su entorno.
El trazado de un diagrama de cuerpo libre implica tres pasos:
1. Identificar el cuerpo a aislar. Como lo muestran los ejemplos siguientes,
la elección suele estar dictada por las fuerzas particulares que se desean
determinar.
2. Dibujar un bosquejo del objeto aislado de su entorno y mostrar las dimensiones y ángulos relevantes. El dibujo debe ser razonablemente preciso, pero
pueden omitirse detalles irrelevantes.
3. Dibujar los vectores que representen todas las fuerzas externas que actúen
sobre el cuerpo aislado y marcarlos. No se debe olvidar la inclusión de la
fuerza gravitatoria, a menos que se ignore de manera intencional.
Se necesita un sistema coordenado para expresar las fuerzas sobre el objeto
aislado, en términos de sus componentes. A menudo es conveniente elegir el sistema de coordenadas antes de dibujar el diagrama de cuerpo libre, pero en ciertos
casos la mejor elección de un sistema coordenado no será evidente hasta después
de dibujar el diagrama.
Un ejemplo sencillo demostrará cómo elegir los diagramas de cuerpo libre
para determinar fuerzas particulares y también que se debe distinguir con cuidado
entre fuerzas externas e internas. En la figura 3.15, dos bloques estacionarios de
igual peso W están suspendidos por medio de cables. El sistema está en equilibrio.
Suponga que se desea determinar las tensiones en los dos cables.
D
C
B
A
Figura 3.15
Bloques estacionarios suspendidos mediante
cables.
88
Capítulo 3 Fuerzas
D
C
y
B
TAB
Figura 3.16
(a) Aislamiento del bloque inferior y parte del
cable AB.
(b) La indicación de las fuerzas exteriores
completa el diagrama de cuerpo libre.
(c) Introducción de un sistema de coordenadas.
A
TAB
A
A
W
W
x
(a)
(b)
(c)
Para determinar la tensión en el cable AB, primero se aísla un “objeto” que consista en el bloque inferior y parte del cable AB (figura 3.16a). Después, se determinan las fuerzas que pueden ejercerse sobre este objeto aislado mediante objetos que
no se incluyen en el diagrama. La Tierra ejerce una fuerza gravitatoria de magnitud
W sobre el bloque, y en el sitio donde se “corta” el cable AB, éste se encuentra sometido a una fuerza de contacto igual a la tensión en el cable (figura 3.16b). Las flechas
en esta figura indican las direcciones de las fuerzas. El escalar W es el peso del bloque y TAB es la tensión en el cable AB. El peso de la parte del cable incluido en el
diagrama de cuerpo libre puede ignorarse si se compara con el peso del bloque.
Como el diagrama de cuerpo libre está en equilibrio, la suma de las fuerzas externas es cero. La ecuación de equilibrio se obtiene en términos de un sistema
coordenado con el eje y dirigido hacia arriba (figura 3.16c),
©F = TAB j - Wj = 1TAB - W2j = 0.
Así, la tensión en el cable AB es TAB W.
Ahora se puede determinar la tensión en el cable CD aislando el bloque superior
(figura 3.17a). Las fuerzas externas son el peso del bloque superior y las tensiones en
los dos cables (figura 3.17b). En este caso se obtiene la ecuación de equilibrio
©F = TCD j - TAB j - W j = 1TCD - TAB - W2j = 0.
Como TAB W, se encuentra que TCD 2W.
y
TCD
D
C
C
B
B
W
A
Figura 3.17
(a) Aislamiento del bloque superior para
determinar la tensión en el cable CD.
(b) Diagrama de cuerpo libre del bloque
superior.
TAB
x
(a)
(b)
3.1 Fuerzas, equilibrio y diagramas de cuerpo libre
y
TCD
D
C
C
B
B
A
A
W
Figura 3.18
(a) Elección alternativa para determinar la
tensión en el cable CD.
(b) Diagrama de cuerpo libre que incluye
ambos bloques y el cable AB.
W
x
(a)
(b)
También se podría haber determinado la tensión en el cable CD tratando los
dos bloques y el cable AB como un solo objeto (figura 3.18a, b). La ecuación de
equilibrio es
©F = TCD j - Wj - Wj = 1TCD - 2W2j = 0,
y se obtiene de nuevo TCD 2W.
¿Por qué la tensión en el cable AB no aparece en el diagrama de cuerpo libre de
la figura 3.18(b)? Recuerde que en los diagramas de cuerpo libre se muestran sólo
fuerzas externas. Como en este caso el cable AB es parte del diagrama de cuerpo libre,
las fuerzas que ejerce sobre los bloques superiores e inferiores son fuerzas internas.
RESULTADOS
Linea de acción
La línea recta colineal a un vector que
representa una fuerza es la línea de acción
de la fuerza.
Sistemas de fuerzas
Un sistema de fuerzas es bidimensional si las líneas
de acción de las fuerzas se encuentran en un plano.
En caso contrario el sistema es tridimensional.
Un sistema de fuerzas es concurrente si las líneas
de acción de las fuerzas se cortan en un punto y
paralelo si las líneas de acción son paralelas.
F
FA
FB
FC
Fuerzas concurrentes
Fuerzas externas e internas
Un objeto está sometido a una fuerza externa
si la fuerza es ejercida por un objeto diferente.
Una fuerza ejercida sobre una parte de un
objeto por otra parte del mismo objeto es una
fuerza interna.
Línea de
acción F
FA FB
FC
Fuerzas paralelas
FD
89
90
Capítulo 3 Fuerzas
Fuerzas gravitatorias
El peso de un objeto puede representarse mediante
un vector. Su magnitud al nivel del mar está relacionada con la masa m del objeto mediante la ecuación
兩W兩 mg,
(3.1)
donde g es la aceleración debida a la gravedad al
nivel del mar.
W
A B
Objetos A y B con superficies
planas en contacto.
F
A
B
F
Fuerzas de contacto
Los objetos en contacto ejercen entre
sí fuerzas que son iguales y opuestas.
Fuerzas de contacto que A y B
ejercen entre sí.
B
N
f
Descomposición de la fuerza
sobre B en las fuerzas normal
y de fricción.
N
B
Cuando la fuerza de fricción
puede ignorarse sólo existe una
fuerza normal.
A
Cuerdas y cables
Si el peso de una cuerda o cable que conecta a dos
objetos es insignificante en comparación con su tensión,
éste ejerce fuerzas iguales y opuestas sobre los objetos,
las cuales son paralelas a la cuerda o el cable.
B
Objetos A y B conectados por un cable.
F
A
F
B
Fuerzas ejercidas sobre A y B.
3.2 Sistemas bidimensionales de fuerzas
Resortes lineales
La magnitud de las fuerzas iguales y opuestas
ejercidas sobre dos objetos conectados por un
resorte lineal es
兩F兩 k兩L L0兩,
A
B
Objectos A y B conectados por un resorte.
(3.2)
F
donde k es la constante del resorte, L es la longitud del resorte y L0 su longitud sin elongar.
A
F
B
Fuerzas ejercidas sobre A y B.
Equilibrio
Un objeto está en equilibrio si está en translación uniforme (cada
punto del objeto tiene la misma velocidad constante) en relación
con un marco de referencia inercial. La suma de las fuerzas
externas que actúan sobre un objeto en equilibrio es igual a cero:
F 0.
(3.3)
Diagramas de cuerpo libre
Un diagrama de cuerpo libre es el dibujo de un
objeto, aislado de su entorno, que muestra las fuerzas exteriores que actúan sobre el objeto. Dibujar
un diagrama de cuerpo libre implica tres pasos.
1. Identificar al objeto que se
desea aislar.
2. Dibujar un bosquejo del
objeto aislado de su entorno.
3. Dibujar vectores representando
las fuerzas externas que actúan
sobre el objeto.
3.2 Sistemas bidimensionales de fuerzas
Suponga que el sistema de las fuerzas externas que actúan sobre un cuerpo en
equilibrio es bidimensional (coplanar). Al orientar un sistema coordenado de
manera que las fuerzas queden en el plano x–y, es posible expresar la suma de las
fuerzas externas como
©F = 1©Fx2i + 1©Fy2j = 0,
donde 兺Fx y 兺Fy son las sumas de las componentes x e y de las fuerzas. Como
un vector es cero sólo si cada uno de sus componentes es cero, se obtienen dos
ecuaciones de equilibrio escalar:
©Fx = 0,
©Fy = 0.
(3.4)
Las sumas de las componentes x e y de las fuerzas externas que actúan sobre un
objeto en equilibrio debe ser igual a cero.
91
92
Capítulo 3 Fuerzas
Ejemplo activo 3.1
Uso del equilibrio para determinar fuerzas ( Relacionado con el problema 3.1)
El automóvil de 1440 kg se mantiene en su lugar sobre la rampa inclinada mediante el cable horizontal desde A hasta B. Los frenos del automóvil no están activados,
por lo que las llantas ejercen sólo fuerzas normales sobre la rampa. Determine la
magnitud de la fuerza ejercida por el cable sobre el automóvil.
A
B
20
Estrategia
Como el automóvil está en equilibrio, es posible dibujar su diagrama de cuerpo libre
y usar las ecuaciones (3.4) para determinar la fuerza ejercida por el cable.
Solución
Dibuje el diagrama de cuerpo libre del automóvil
Dibuje un bosquejo del automóvil aislado.
Complete el diagrama de cuerpo libre
mostrando las fuerzas ejercidas sobre el
automóvil por su peso, el cable y la rampa.
T
mg
N
Aplique las ecuaciones de equilibrio
Fx T N sen 20 0,
Fy N cos 20 mg 0.
y
T
Al eliminar N se obtiene
mg sen 20
cos 20
(1440 kg)(9.81 m/s2)sen 20
cos 20
5140 N.
T
N
mg
20
x
Problema de práctica Suponga que el punto de unión del cable en B se mueve
hacia arriba de manera que el cable sea paralelo a la rampa. Determine la magnitud
de la fuerza ejercida por el cable sobre el automóvil.
Respuesta: 4830 N.
3.2 Sistemas bidimensionales de fuerzas
Ejemplo 3.2
Elección de un diagrama de cuerpo libre ( Relacionado con el problema 3.3)
El motor de automóvil que se muestra en la figura está suspendido mediante un
sistema de cables. La masa del motor es de 200 kg. El sistema es estacionario.
¿Cuáles son las tensiones en los cables AB y AC?
B
Estrategia
Se necesita un diagrama de cuerpo libre en el que se muestren las fuerzas que se desean determinar. Aislando parte del sistema de cables cerca del punto A, donde se
unen los cables, se puede obtener un diagrama de cuerpo libre que está sometido al
peso del motor y a las tensiones desconocidas en los cables AB y AC.
A
Solución
Dibujo del diagrama de cuerpo libre Aislando parte del sistema de cables cerca
del punto A (figura a), se obtiene un diagrama de cuerpo libre sometido al peso del
motor W mg (200 kg)(9.81 m/s2) 1962 N y a las tensiones en los cables AB
y AC (figura b).
y
TAB
TAB
TAC
C
B
60
A
TAB sen 60
TAC sen 45
TAC
60
45
TAB cos 60
45
TAC cos 45
A
W
W
(a)
(b)
(a) Aislamiento de parte del sistema de
cables.
(b) Diagrama de cuerpo libre completo.
x
(c) Selección de un sistema coordenado y
descomposición de las fuerzas en sus
componentes.
Aplicación de las ecuaciones de equilibrio Se selecciona el sistema coordenado que se muestra en la figura c y se descomponen las tensiones de los cables en sus
componentes x y y. Las ecuaciones de equilibrio resultantes son
兺Fx TAC cos 45° TAB cos 60° 0,
兺Fy TAC sen 45° TAB sen 60° 1962 N 0.
Al resolver estas ecuaciones, se encuentra que las tensiones en los cables son
TAB 1436 N y TAC 1016 N.
Razonamiento crítico
¿Cómo puede escogerse un diagrama de cuerpo libre que permita determinar las
tensiones desconocidas en los cables? No existen reglas específicas para elegir
diagramas de cuerpo libre. Usted aprenderá a hacerlo con los ejemplos que se
presentarán, pero siempre encontrará situaciones nuevas. Quizá sea necesario
ensayar varios diagramas de cuerpo libre antes de encontrar el que proporcione
la información requerida. Recuerde que las fuerzas que se desean determinar
deben aparecer como fuerzas externas en el diagrama de cuerpo libre, y que el
objetivo es obtener un número de ecuaciones de equilibrio igual al número de
fuerzas desconocidas.
60
45
C
93
94
Capítulo 3 Fuerzas
Ejemplo 3.3
Aplicación del equilibrio a un sistema de poleas ( Relacionado con el problema 3.54)
La masa de cada polea del sistema es m, y la masa del objeto suspendido A es mA.
Determine la fuerza T necesaria para que el sistema esté en equilibrio.
D
C
B
T
A
Estrategia
Al dibujar diagramas de cuerpo libre de las poleas individuales y al aplicar el equilibrio, es posible relacionar la fuerza T con los pesos de las poleas y el objeto A.
Solución
Primero se dibuja un diagrama de cuerpo libre de la polea C, a la cual se le aplica
la fuerza T (figura a). Observe que se supone que la tensión en el cable soportada
por la polea es igual a T en ambos lados (vea la figura 3.8). A partir de la ecuación
de equilibrio
TD
D
C
TD - T - T - mg = 0,
mg
T
se determina que la tensión en el cable soportada por la polea D es
T
(a)
C
TD ⫽ 2T ⫹ mg
B
T
T
T
TD = 2T + mg.
Ahora se conocen las tensiones en los cables que se extienden desde las poleas
C y D hasta la polea B en términos de T. Al dibujar el diagrama de cuerpo libre
de la polea B (figura b), se obtiene la ecuación de equilibrio
T + T + 2T + mg - mg - mAg = 0.
Resolviendo, se obtiene T ⫽ mA g/4.
A
B
mg
mAg
(b)
(a) Diagrama de cuerpo libre de la
polea C.
(b) Diagrama de cuerpo libre de la
polea B.
Razonamiento crítico
Observe que los objetos que se aislaron en las figuras a y b incluyen partes de los
cables. Los pesos de esas partes del cable son fuerzas que actúan en los diagramas
de cuerpo libre. ¿Por qué no fueron incluidas? Se supuso de manera tácita que los
pesos de esas partes podrían ignorarse en comparación con los pesos de las poleas
y el objeto suspendido A. A través del libro, usted se dará cuenta que a menudo
los pesos de los objetos son ignorados al analizar las fuerzas que actúan sobre
ellos. Ésta es una aproximación válida para un objeto dado si su peso es pequeño
en comparación con las otras fuerzas que actúan sobre él; sin embargo, en cualquier aplicación real de ingeniería, este supuesto debe evaluarse con cuidado. En
el capítulo 7 se analizan los pesos de los objetos a mayor detalle.
3.2 Sistemas bidimensionales de fuerzas
Fuerzas sobre un avión en equilibrio ( Relacionado con los problemas 3.60–3.62)
Ejemplo 3.4
En la figura se muestra un avión que vuela en el plano vertical y su diagrama de
cuerpo libre. Las fuerzas que actúan sobre el avión son su peso W, el empuje T
ejercido por sus motores, y las fuerzas aerodinámicas que resultan de la distribución de presión sobre la superficie del avión. La línea discontinua indica la
trayectoria que sigue el avión. Las fuerzas aerodinámicas se descomponen en
una componente perpendicular a la trayectoria, la fuerza de elevación L, y una
componente paralela a la trayectoria, la fuerza de arrastre D. El ángulo g entre
la horizontal y la trayectoria se denomina ángulo de la trayectoria de vuelo, y a
es el ángulo de ataque. Si el avión permanece en equilibrio durante un intervalo
de tiempo, se dice que se encuentra en vuelo uniforme. Si g ⫽ 6°, D ⫽ 125 kN,
L ⫽ 680 kN y la masa del avión es de 72,000 kg, ¿qué valores de T y de a son
necesarios para mantener un vuelo uniforme?
y
Trayectoria
T
x
a
g
L
D
Horizontal
W
Estrategia
Se supone que el avión está en equilibrio. Aplicando las ecuaciones (3.4) al diagrama de cuerpo libre dado, se obtendrán dos ecuaciones con las cuales podrá determinarse T y a.
Solución
En términos del sistema coordenado de la figura, las ecuaciones de equilibrio son
兺Fx ⫽ T cos a ⫺ D ⫺ W sen g ⫽ 0,
(1)
兺Fy ⫽ T sen a ⫹ L ⫺ W cos g ⫽ 0,
(2)
donde el peso del avión es W ⫽ (72,000 kg)(9.81 m/s ) ⫽ 706,000 N. De la ecuación (2) se despeja sen a, de la ecuación (1) se despeja cos a y se dividen para
obtener una ecuación para tan a:
2
tan a =
=
W cos g - L
W sen
sin g + D
1706,000 N2 cos 6° - 680,000 N
1706,000 N2 sen
sin 6° + 125,000 N
= 0.113.
El ángulo de ataque a ⫽ arctan(0.113) ⫽ 6.44°. Ahora se usa la ecuación (1) para
determinar el empuje:
T =
=
W sen
sin g + D
cos a
1706,000 N2 sen
sin 6° + 125,000 N
cos 6.44°
= 200,000 N.
Observe que el empuje necesario para un vuelo uniforme es de 28% del peso del
avión.
95
96
Capítulo 3 Fuerzas
Problemas
3.1 En el ejemplo activo 3.1, suponga que el ángulo de la
rampa que soporta el automóvil se aumenta de 20° a 30°. Dibuje
el diagrama de cuerpo libre del automóvil que muestre la nueva
geometría. Suponga que el cable de A a B debe ejercer una fuerza
horizontal de 1900 lb sobre el auto para mantenerlo en su lugar.
Determine el peso del automóvil en libras.
3.5 Una pesada cuerda que se usa como amarradero para un
barco crucero se cuelga en la forma mostrada. Si la masa de la
cuerda es 90 kg, ¿cuáles son las tensiones en la cuerda en A y B?
55⬚
A
B
3.2 El anillo de la figura pesa 5 lb y está en equilibrio. La fuerza
F1 ⫽ 4.5 lb. Determine la fuerza F2 y el ángulo a.
Problema 3.5
y
F2
40⬚
a
3.6 Un fisiólogo estima que el músculo masetero de un depredador es capaz de ejercer una fuerza M de hasta 900 N. Suponga que
la quijada está en equilibrio y determine la fuerza necesaria T que
ejerce el músculo temporal y la fuerza P ejercida sobre un objeto
mordido por el depredador.
F1
30⬚
x
22⬚
T
Problema 3.2
P
3.3 En el ejemplo 3.2, suponga que el punto de unión C se
mueve a la derecha y el cable AC se extiende de manera que el ángulo entre el cable AC y el techo disminuye de 45° a 35°. El ángulo entre el cable AB y el techo permanece en 60°. ¿Cuáles son las
tensiones en los cables AB y AC?
3.4 Un motor de 200 kg está suspendido por los cables AB y AC.
El ángulo a ⫽ 40°. En la figura se muestra el diagrama de cuerpo
libre obtenido al aislar la parte del sistema dentro de la línea discontinua. Determine las fuerzas TAB y TAC.
y
TAB
B
TAC
C
a
A
a
A
(200 kg) (9.81 m/s2)
Problema 3.4
x
M
36⬚
Problema 3.6
Problemas
3.7 Los dos resortes de la figura son idénticos, con longitudes sin
elongar de 250 mm y constantes k 1200 N/m.
a) Dibuje el diagrama de cuerpo libre del bloque A.
b) Dibuje el diagrama de cuerpo libre del bloque B.
c) ¿Cuáles son las masas de los dos bloques?
3.8 Los dos resortes de la figura son idénticos, con longitudes sin
elongar de 250 mm. Suponga que la constante k es desconocida y
que la suma de las masas de los bloques A y B es 10 kg. Determine el valor de k y las masas de los dos bloques.
97
3.10 La masa de una grúa es de 20,000 kg. El cable de la grúa
está unido a un bloque cuya masa es de 400 kg. La tensión en su
cable es de 1 kN.
a) Determine las magnitudes de las fuerzas normal y de fricción
ejercidas sobre la grúa por el terreno a nivel del suelo.
b) Determine las magnitudes de las fuerzas normal y de fricción
ejercidas sobre el cajón por el suelo a nivel del suelo.
Estrategia: Para resolver el inciso a), dibuje el diagrama de
cuerpo libre de la grúa y la parte de su cable dentro de la línea
discontinua.
300 mm
45
A
Problema 3.10
280 mm
3.11 La superficie inclinada es lisa. La caja de 100 kg se mantiene estacionaria mediante la fuerza T aplicada al cable.
a) Dibuje el diagrama de cuerpo libre de la caja.
b) Determine la fuerza T.
B
Problemas 3.7/3.8
T
3.9 La superficie inclinada es lisa (recuerde que “lisa” significa
que se puede ignorar la fricción). Los dos resortes son idénticos.
Con longitudes sin elongar de 250 mm y constantes de resorte
k 1200 N/m, ¿cuáles son las masas de los bloques A y B?
60
300 mm
A
Problema 3.11
280 mm
B
30
Problema 3.9
98
Capítulo 3 Fuerzas
3.12 El automóvil de 1200 kg que se muestra en la figura se
estaciona en una calle inclinada.
a) Si a ⫽ 20°, ¿cuáles son las magnitudes de las fuerzas totales
normal y de fricción ejercidas sobre las llantas del auto por el
pavimento?
b) El automóvil permanecerá estacionado sólo si la fuerza de fricción total necesaria para el equilibrio no es mayor que 0.6 veces la
fuerza normal total. ¿Cuál es el máximo ángulo a para el cual el
automóvil permanecerá estacionado?
3.15 Una caja de 80 lb se mantiene en su lugar sobre una superficie lisa inclinada mediante la cuerda AB que se muestra en
la figura. Determine la tensión en la cuerda y la fuerza normal
ejercida sobre la caja por la superficie inclinada.
A
B
30⬚
50⬚
Problema 3.15
a
Problema 3.12
3.13 Una caja de 100 lb está en equilibrio sobre la superficie lisa
que se muestra en la figura. La constante del resorte es k ⫽ 400
lb/pie. Sea S la elongación del resorte. Obtenga una ecuación para
S (en pies) como una función del ángulo a.
3.16 El automóvil de 1360 kg y el camión de remolque de 2100
kg que se muestran en la figura están estacionados. La superficie
fangosa sobre la que descansan las llantas del automóvil ejerce
fuerzas de fricción despreciables sobre éstas. ¿Cuál es la tensión
en el cable del remolque?
18⬚
10⬚
26⬚
a
Problema 3.16
Problema 3.13
3.14 Una caja de 600 lb se mantiene en equilibrio sobre la plataforma lisa de un camión de volteo por medio de la cuerda AB.
a) Si a ⫽ 25°, ¿cuál es la tensión en la cuerda?
b) Si la cuerda resiste con seguridad una tensión de 400 lb, ¿cuál
es el valor máximo permisible para a?
3.17 Cada caja pesa 40 lb. Los ángulos se miden en relación
con la horizontal. Las superficies son lisas. Determine la tensión
en la cuerda A y la fuerza normal ejercida sobre la caja B por la
superficie inclinada.
A
B
B
A
C
a
70⬚
45⬚
D
20⬚
Problema 3.17
Problema 3.14
Problemas
3.18 Un cuadro de 10 kg está colgado con un alambre, soportado
por un clavo. La longitud del alambre es 1.3 m.
a) ¿Cuál es la tensión en el alambre?
b) ¿Cuál es la magnitud de la fuerza ejercida sobre el clavo por el
alambre?
99
3.22 Una trabajadora ejerce una fuerza de 20 lb sobre la cuerda
que se muestra en la figura para mantener la caja en equilibrio y
en su posición. ¿Cuál es el peso de la caja?
5
1.2 m
30
Problema 3.18
3.19 Un cuadro de 10 kg está colgado con un alambre, soportado
por dos clavos. La longitud del alambre es 1.3 m.
a) ¿Cuál es la tensión en el alambre?
b) ¿Cuál es la magnitud de la fuerza ejercida sobre cada clavo por
el alambre? (Suponga que la tensión es la misma en cada parte del
alambre).
Compare sus respuestas con los resultados del problema 3.18.
Problema 3.22
0.4 m
0.4 m
0.4 m
Problema 3.19
3.23 Un trabajador en la Luna, donde la aceleración debida a la
gravedad es de 1.62 m/s2, mantiene en equilibrio la misma caja
descrita en el problema 3.22 en la posición mostrada. ¿Qué fuerza
debe ejercer sobre el cable para mantener la caja en equilibrio
a) en newtons y b) en libras?
5
3.20 Suponga que el alpinista de 150 lb que se muestra en la
figura está en equilibrio. ¿Cuáles son las tensiones en la cuerda
al lado izquierdo y al lado derecho del alpinista?
3.21 Si la masa del alpinista del problema 3.20 es de 80 kg,
¿cuáles son las tensiones en la cuerda al lado izquierdo y al lado
derecho del alpinista?
24
30
15
Problema 3.23
Problemas 3.20/3.21
100
Capítulo 3 Fuerzas
3.24 La persona que se muestra en la figura quiere hacer que
la caja de 200 lb comience a deslizarse hacia la derecha. Para
lograr esto, la componente horizontal de la fuerza ejercida por la
cuerda sobre la caja debe ser igual a 0.35 veces la fuerza normal
ejercida por el piso sobre la caja. En la figura (a), la persona jala
la cuerda en la dirección mostrada. En la figura (b), la persona
une la cuerda a un soporte como se muestra en la figura y la jala
hacia arriba. ¿Cuál es la magnitud de la fuerza que la persona
debe ejercer sobre la cuerda en cada caso?
3.26 Las longitudes de los cables AB y BC que se muestran en la
figura tienen 3 m y 4 m de longitud, respectivamente. Los puntos
A y C están a la misma altura. La masa del objeto suspendido es
350 kg. Determine las tensiones en los cables AB y BC.
3.27 La longitud del cable AB es ajustable. El cable BC tiene
4 m de largo. Si usted no desea que la tensión en el cable AB o en
el cable BC exceda 3 kN, ¿cuál es la longitud mínima aceptable
del cable AB?
5m
A
C
20
B
(a)
Problemas 3.26/3.27
3.28 ¿Cuáles son las tensiones en los cables superior e inferior?
(Deberá dar sus respuestas en términos de W; ignore el peso de la
polea).
10
(b)
Problema 3.24
45
3.25 Un ingeniero de tráfico desea suspender un semáforo de
200 lb encima del centro de los dos carriles derechos de una
avenida de cuatro carriles, como se muestra en la figura. Los
puntos A y C están a la misma altura. Determine las tensiones
en los cables AB y BC.
20 pies
W
Problema 3.28
3.29 Después de un accidente, dos camiones de remolque elevan
una motocicleta de 600 lb para sacarla de la barranca que se muestra en la figura. Si la motocicleta se encuentra en equilibrio en la posición mostrada, ¿cuáles son las tensiones en los cables AB y AC?
80 pies
A
30
C
10 pies
B
30 pies
(36, 36) pies
y
(12, 32) pies
C
B
(26, 16) pies
A
Problema 3.25
x
Problema 3.29
Problemas
3.30 Una aspirante a astronauta realiza experimentos sobre una
plataforma neumática. Mientras efectúa calibraciones, la plataforma se mantiene en equilibrio mediante los tirantes AB, AC y AD.
Las fuerzas ejercidas por los tirantes son las únicas fuerzas horizontales que actúan sobre la plataforma. Si la tensión en el tirante
AC es de 2 N, ¿cuáles son las tensiones en los otros dos tirantes?
101
3.32 El collarín A está en equilibrio y la barra es lisa. ¿Cuál es la
masa del collarín?
20
200 N
A
VISTA SUPERIOR
D
45
4.0 m
Problema 3.32
A
3.5 m
B
C
3.0 m
3.33 La masa de 20 kg que se muestra en la figura está suspendida de tres cables. El cable AC está equipado con un torniquete,
de manera que su tensión puede ajustarse, y un calibrador, que
permite medir su tensión. Si la tensión en el cable AC es de 40 N,
¿cuáles son las tensiones en los cables AB y AD?
1.5 m
0.4 m
0.4 m
0.48 m
Problema 3.30
B
3.31 La cubeta de la figura contiene concreto y pesa 5800 lb.
¿Cuáles son las tensiones en los cables AB y AC?
C
0.64 m
A
(5, 34) pies
y
B
C
(20, 34) pies
Problema 3.33
(12, 16) pies A
x
Problema 3.31
D
102
Capítulo 3 Fuerzas
3.34 La junta estructural se encuentra en equilibrio. Si FA 1000 lb y FD 5000 lb, ¿cuáles son los valores de FB y FC?
FC
80
FB
65
35
FA
FD
Problema 3.34
3.35 El collarín A se desliza sobre la barra vertical lisa que se
muestra en la figura. Las masas mA 20 kg y mB 10 kg. Cuando h 0.1 m, el resorte está sin elongar. Cuando el sistema está
en equilibro, h 0.3 m. Determine la constante k del resorte.
0.25 m
3.36* Suponga que se desea diseñar un sistema de cables para
suspender del techo un objeto con peso W. Los dos cables deben
ser idénticos, y la dimensión b es constante. La razón de la tensión
T en cada cable sobre su área de sección transversal A debe ser
igual a un valor específico T兾A s. El “costo” de su diseño es el
b2 苶
苶
h2.
volumen total de material en los dos cables, V 2A兹苶
Determine el valor de h que minimiza el costo.
h
b
b
A
B
k
h
h
W
Problema 3.36
Problema 3.35
Problemas
3.37 Un sistema de cables sostiene un banco de luces de 1000 lb
sobre un estudio cinematográfico. Determine las tensiones en los
cables AB, CD y CE que se muestran en la figura.
103
3.39 Mientras trabaja en otra muestra, un curador del Instituto
Smithsonian jala hacia un lado el avión Voyager suspendido de la
figura, uniendo los tres cables horizontales mostrados. La masa
del avión es de 1250 kg. Determine las tensiones en los segmentos
de cable AB, BC y CD.
3.38 Un técnico cambia la posición del banco de luces de 1000 lb
retirando el cable CE. ¿Cuál es la tensión en el cable AB después
del cambio?
D
20 pies
C
18 pies
50
B
B
30
D
C
A
70
E
45
30
A
Problema 3.39
Problemas 3.37/3.38
3.40 Un vendedor de camiones quiere suspender un vehículo de 4000 kg como se muestra en la figura, con fines publicitarios. La
distancia b 15 m y la suma de las longitudes de los cables AB y BC es de 42 m. Los puntos A y C tienen la misma altura. ¿Cuáles
son las tensiones en los cables?
40 m
A
b
C
B
Problema 3.40
104
Capítulo 3 Fuerzas
3.41 La distancia h 12 pulg y la tensión en el cable AD es de
200 lb. ¿Cuáles son las tensiones en los cables AB y AC?
B
3.44 Las masas m1 12 kg y m2 6 kg se suspenden mediante
el sistema de cables mostrado en la figura. El cable BC es horizontal. Determine el ángulo a y la tensión en los cables AB, BC y CD.
A
12 pulg
A
D
D
C
α
12 pulg
B
h
8 pulg
70
C
m1
12 pulg
m2
8 pulg
Problema 3.41
Problema 3.44
3.42 Suponga que usted está diseñando un sistema de cables para
soportar un objeto suspendido con peso W. Como su diseño requiere
que los puntos A y B se coloquen como lo muestra la figura, no tiene
control sobre el ángulo a, pero puede elegir el ángulo b colocando el
punto C donde desee. Demuestre que para minimizar las tensiones
en los cables AB y BC, se debe elegir b a si el ángulo a 45°.
Estrategia: Dibuje un diagrama de la suma de fuerzas ejercidas por los tres cables en A.
3.45 Los pesos W1 50 lb y W2 se suspenden mediante el sistema de cables que se muestra en la figura. Determine el peso W2 y
las tensiones en los cables AB, BC, CD.
3.46 Suponga que W2 W1/2. Si no se desea que la tensión
supere 200 lb en ningún punto del cable, ¿Cuál es el mayor
valor aceptable para W1?
30 pulg
30 pulg
30 pulg
A
D
16 pulg
20 pulg
B
a
b
C
B
C
W2
W1
Problemas 3.45/3.46
A
W
Problema 3.42
3.43* La longitud del cable ABC que se muestra en la figura es
1.4 m. La fuerza de 2 kN se aplica sobre una pequeña polea. El
sistema es estacionario. ¿Cuál es la tensión en el cable?
3.47 El cilindro hidráulico está sujeto a tres fuerzas. Se ejerce
una fuerza de 8 kN sobre el cilindro en B, la cual es paralela al cilindro y apunta desde B hacia C. El eslabón AC ejerce una fuerza
en C que es paralela a la línea que va de A a C. El eslabón CD
ejerce una fuerza en C que es paralela a la línea que va de C a D.
a) Dibuje el diagrama de cuerpo libre del cilindro (el peso del cilindro es insignificante).
b) Determine las magnitudes de las fuerzas ejercidas por los eslabones AC y CD.
1m
A
D
1m
C
C
Cilindro
hidráulico
1m
0.6 m
B
A
0.75 m
B
15
Problema 3.43
2 kN
0.15 m
0.6 m
Problema 3.47
Pala
Problemas
3.48 Un cilindro de 50 lb descansa sobre dos superficies lisas.
a) Dibuje el diagrama de cuerpo libre del cilindro.
b) Si a 30°, ¿cuáles son las magnitudes de las fuerzas ejercidas
sobre el cilindro por las superficies izquierda y derecha?
3.49 Obtenga una ecuación para la fuerza ejercida por la superficie izquierda sobre el cilindro de 50 lb en términos del ángulo a
de dos maneras: a) usando un sistema coordenado con el eje y
vertical, y b) usando un sistema de coordenadas con el eje y paralelo a la superficie derecha.
105
3.51 El cable AB tiene 0.5 m de longitud. La longitud sin elongar del resorte es de 0.4 m. Cuando la masa de 50 kg se suspende
en B, la longitud del resorte se incrementa a 0.45 m. ¿Cuál es la
constante k del resorte?
0.7 m
A
C
k
B
45
a
Problema 3.51
Problemas 3.48/3.49
3.50 Los dos resortes son idénticos; cada uno tiene una longitud
sin elongar de 0.4 m. Cuando la masa de 50 kg se suspende en B,
la longitud de cada resorte se incrementa a 0.6 m. ¿Cuál es la
constante k del resorte?
3.52* La esfera pequeña que se muestra en la figura tiene una
masa m, está unida a un cordón de longitud L y descansa sobre
la superficie lisa de una esfera fija de radio R. El centro de la
esfera está directamente por debajo del punto donde está unido el
cordón. Obtenga una ecuación para determinar la tensión en
el cordón, en términos de m, L, h y R.
0.6 m
A
C
h
L
m
k
k
R
B
Problema 3.50
Problema 3.52
106
Capítulo 3 Fuerzas
3.53 La superficie inclinada es lisa. Determine la fuerza T que
debe ejercerse sobre el cable para mantener en equilibrio la caja de
100 kg que se muestra en la figura y compare su respuesta con
el resultado del problema 3.11.
3.56 La masa suspendida m1 50 kg. Si se ignoran las masas de
las poleas, determine el valor de la masa m2 necesaria para que el
sistema esté en equilibrio.
A
T
B
60
C
m2
Problema 3.53
m1
3.54 En el ejemplo 3.3, suponga que la masa del objeto
suspendido es mA y las masas de las poleas son mB 0.3mA,
mC 0.2mA y mD 0.2mA. Muestre que la fuerza T necesaria
para que el sistema esté en equilibrio es de 0.275 mAg.
3.55 La masa de cada polea del sistema que se muestra en la
figura es m y la masa del objeto A suspendido es mA. Determine
la fuerza T necesaria para que el sistema esté en equilibrio.
T
A
Problema 3.55
Problema 3.56
Problemas
107
3.57 El niño que se muestra en la figura se está elevando a sí mismo usando la polea y el polipasto mostrados. Si el peso de la polea y
el polipasto son insignificantes, y el peso combinado del niño y la viga sobre la que está sentado es de 120 lb, ¿qué fuerza debe ejercer
sobre la cuerda para elevarse a una velocidad constante? (Desprecie la desviación de las cuerdas con respecto a la vertical).
Problema 3.57
3.58 En la figura se muestran sistemas que contienen una, dos y
tres poleas. Sin considerar los pesos de las poleas, determine la
fuerza T requerida para soportar el peso W en cada caso.
3.59 El número de poleas en el tipo de sistema mostrado en la figura podría extenderse de manera obvia a un número arbitrario N.
a) Si se desprecian los pesos de las poleas, determine la fuerza T
requerida para soportar el peso W como una función del número N
de poleas en el sistema.
b) Usando los resultados del inciso (a), determine la fuerza T requerida para soportar el peso W para un sistema con 10 poleas.
T
T
T
W
(a) Una polea
W
(b) Dos poleas
W
(c) Tres poleas
Problemas 3.58/3.59
3.60 Un avión de 14,000 kg se encuentra en vuelo uniforme
en el plano vertical. La trayectoria de vuelo es g ⫽ 10°, el ángulo
de ataque es a a ⫽ 4° y la fuerza de empuje ejercida por el motor
es T ⫽ 60 kN. ¿Cuáles son las magnitudes de las fuerzas de elevación y arrastre que actúan sobre el avión? (Vea el ejemplo 3.4).
3.61 Un avión se encuentra en vuelo uniforme, el ángulo de
ataque a ⫽ 0, la razón del empuje sobre el arrastre T兾D ⫽ 2 y
la razón de la elevación sobre el arrastre L兾D ⫽ 4. ¿Cuál es el
ángulo g de la trayectoria del vuelo? (Vea el ejemplo 3.4).
3.62 Un avión planea en vuelo uniforme (T ⫽ 0) y su razón de
elevación sobre arrastre L兾D ⫽ 4.
a) ¿Cuál es el ángulo g de la trayectoria del vuelo?
b) Si el avión planea desde una altura de 1000 m hasta una altura
de 0 m, ¿qué distancia horizontal viajará? (Vea el ejemplo 3.4).
108
Capítulo 3 Fuerzas
3.3 Sistemas tridimensionales de fuerzas
Las situaciones de equilibrio que se han considerado hasta ahora implicaron sólo
fuerzas coplanares. Cuando el sistema de fuerzas externas que actúan sobre un
cuerpo en equilibrio es tridimensional, es posible expresar la suma de las fuerzas
externas como
©F = 1©Fx2i + 1©Fy2j + 1©Fz2k = 0.
Cada componente de esta ecuación debe ser igual a cero, lo que resulta en tres
ecuaciones de equilibrio escalares
©Fx = 0,
©Fy = 0,
©Fz = 0.
(3.5)
Las sumas de las componentes x, y y z de las fuerzas externas que actúan sobre un
cuerpo en equilibrio deben ser iguales a cero.
Ejemplo activo 3.5
( Relacionado con el problema 3.63)
El cilindro de 1000 kg que se muestra en la figura pende del techo por un sistema
de cables sostenidos en los puntos B, C y D. ¿Cuáles son las tensiones en los cables
AB, AC y AD?
C
(2, 0, 2) m
y
x
B
(4, 0, 2) m
(3, 0, 3) m
D
A (0, 4, 0) m
z
100 kg
Estrategia
Si se aísla parte del sistema de cables cerca del punto A, se obtendrá un diagrama
de cuerpo libre sometido a las fuerzas causadas por las tensiones en los cables.
Como cada suma de las componentes x, y y z de las fuerzas externas debe ser igual
a cero, se pueden obtener tres ecuaciones para las tres tensiones desconocidas. Para
hacer esto, es necesario expresar las fuerzas ejercidas por las tensiones en términos
de sus componentes.
Solución
Dibuje el diagrama de cuerpo libre y aplique el equilibrio
y
C
x
Aísle parte del sistema de cables cerca del
punto A y muestre las fuerzas ejercidas por
las tensiones en los cables. La suma de las
fuerzas debe ser igual a cero:
F TAB TAC TAD (981 N)j 0.
B
TAC
D
TAB
TAD
z
A
A
(100 kg)(9.81 m/s2)j
3.3 Sistemas tridimensionales de fuerzas
Escriba los vectores en términos de sus componentes
y
C
rAB
x
B
(4, 0, 2) m
D
z
Obtenga un vector unitario que tenga
la misma dirección de la fuerza TAB
dividiendo el vector de posición rAB
del punto A al punto B entre su
magnitud.
rAB (xB xA)i (yB yA)j (zB zA)k.
4i 4j 2k (m).
r
eAB AB 0.667i 0.667j 0.333k.
兩rAB兩
TAB TAB eAB
TAB(0.667i 0.667j 0.333k),
TAC TAC (0.408i 0.816j 0.408k),
TAD TAD(0.514i 0.686j 0.514k).
A (0, 4, 0) m
Exprese la fuerza TAB en términos
de sus componentes escribiéndola
como el producto de la tensión TAB
en el cable AB por el vector unitario
eAB. Exprese las fuerzas TAC y TAD
en términos de sus componentes
usando el mismo procedimiento.
Sustituya estas expresiones en la ecuación de equilibrio
TAB TAC TAD (981 N)j 0.
Como las componentes i, j y k deben ser iguales a cero,
esto resulta en tres ecuaciones:
0.667TAB 0.408TAC 0.514TAD 0,
0.667TAB 0.816TAC 0.686TAD 981 N 0,
0.333TAB 0.408TAC 0.514TAD 0.
Resolviendo estas tres ecuaciones, se obtiene TAB 519 N, TAC 636 N y
TAC 168 N.
Problema de práctica Suponga que los cables AB, AC y AD se alargan de manera
que el punto de unión A se ubica en el punto (0, 6, 0) m. ¿Cuáles son las tensiones
en los cables?
Respuesta: TAB = 432 N, TAC = 574 N, TAD = 141 N.
109
110
Capítulo 3 Fuerzas
Ejemplo 3.6
Aplicación del producto punto ( Relacionado con el problema 3.79)
El collarín C de 100 lb que se muestra en la figura se mantiene en su lugar sobre
la barra lisa mediante el cable AC. Determine la tensión en el cable y la fuerza
ejercida sobre el collarín por la barra.
y
B
4 pies
A
6 pies
7 pies
C
O
x
4 pies
z
D
4 pies
Estrategia
Como se desea determinar las fuerzas que actúan sobre el collarín, es necesario
dibujar su diagrama de cuerpo libre. Las fuerzas externas que actúan sobre el collarín son su peso y las fuerzas ejercidas sobre él por el cable y la barra. Si este
ejemplo se resuelve como el anterior, el siguiente paso consiste en expresar las
fuerzas en función de sus componentes. Sin embargo, no se conoce la dirección
de la fuerza ejercida por la barra sobre el collarín. Como la barra lisa ejerce una
fuerza de fricción insignificante, se sabe que la fuerza es normal al eje de la barra.
Por lo tanto, es posible eliminar esta fuerza de la ecuación 兺F 0 tomando el producto punto de la ecuación con un vector unitario que sea paralelo a la barra.
Solución
Dibuje el diagrama de cuerpo libre Se aísla el collarín (figura a) y se completa el diagrama de cuerpo libre mostrando el peso del collarín, la fuerza T ejercida
por la tensión en el cable y la fuerza normal N ejercida por la barra (figura b).
Aplique las ecuaciones de equilibrio La suma de las fuerzas externas que
actúan sobre el diagrama de cuerpo libre es
©F = T + N - 1100 lb2j = 0.
(1)
Sea eBD el vector unitario que apunta desde el punto B hacia el punto D. Como N
es perpendicular a la barra, eBD ⴢ N 0. Por lo tanto,
eBD # 1©F2 = eBD # [T - 1100 lb2j] = 0.
Determinación de eBD: Se determina el vector que va del punto B al punto D,
rBD (4 0)i (0 7)j (4 0)k 4i 7j 4k (pie),
y se divide entre su magnitud para obtener el vector unitario eBD:
eBD =
rBD
ƒ rBD ƒ
=
4
7
4
i - j + k.
9
9
9
(2)
3.3 Sistemas tridimensionales de fuerzas
111
Expresión de T en términos de componentes: Es necesario determinar las coordenadas del collarín C. El vector que va de B a C puede escribirse en términos del
vector unitario eBD,
rBC 6eBD 2.67i 4.67j 2.67k (pie),
y luego puede sumarse al vector que va del origen O a B para obtener el vector de
O a C:
rOC = rOB + rBC = 7j + 12.67i - 4.67j + 2.67k2
2.67i 2.33j 2.67k (pie),
Las componentes de este vector son las coordenadas del punto C. Ahora se puede
determinar un vector unitario con la misma dirección que T. El vector de C a A es
rCA = 10 - 2.672i + 17 - 2.332j + 14 - 2.672k
(a)
2.67i 4.67j 1.33k (pie),
y el vector unitario que apunta desde el punto C hacia el punto A es
eCA =
rCA
ƒ rCA ƒ
T
N
= - 0.482i + 0.843j + 0.241k.
Sea T la tensión en el cable AC. Entonces se puede escribir el vector T como
T = TeCA = T1-0.482i + 0.843j + 0.241k2.
Determinación de T y N: Si se sustituye en la ecuación (2) las expresiones para eBD
y T en términos de sus componentes, resulta
0 = eBD # 3T - 1100 lb2j4
4
7
4
= a i - j + kb # [-0.482T i + 10.843T - 100 lb2j + 0.241T k]
9
9
9
= - 0.762T + 77.8 lb,
y se obtiene la tensión T 102 lb.
Usando la ecuación (1) ahora es posible determinar la fuerza ejercida por la
barra sobre el collarín:
N = - T + 1100 lb2j
= - 1102 lb21- 0.482i + 0.843j + 0.241k2 + 1100 lb2j
= 49.1i + 14.0j - 24.6k 1lb2.
Razonamiento crítico
Al obtener el producto punto de la ecuación de equilibrio para el collarín con
un vector unitario eBD que es paralelo a la barra lisa BD, se obtuvo la ecuación (2),
la cual no contiene la fuerza normal N. ¿Por qué pasa esto? La respuesta formal
es que eBD es perpendicular a N, y entonces eBD ⴢ N 0. Pero la interpretación
física de la ecuación (2) proporciona una explicación más convincente: Ésta
establece que la componente del peso del collarín paralela a la barra está balanceada por la componente de T paralela a la barra. La fuerza normal ejercida sobre
el collarín por la barra lisa no tiene componente paralela a la barra. Entonces
se tuvo la posibilidad de resolver para la tensión en el cable sin conocer la fuerza
normal N.
100 j (lb)
(b)
(a) Aislamiento del collarín.
(b) Diagrama de cuerpo libre del collarín
donde se muestran las fuerzas ejercidas
por su peso, el cable y la barra.
112
Capítulo 3 Fuerzas
Problemas
3.63 En el ejemplo activo 3.5, suponga que el punto de unión
B se mueve al punto (5, 0, 0) m. ¿Cuáles son las tensiones en los
cables AB, AC y AD?
3.67 El tractor de la figura ejerce una fuerza F 2i (kip) en A.
¿Cuáles son las tensiones en las cables AB, AC y AD?
y
3.64 La fuerza F 800i 200j (lb) actúa en el punto A donde
se unen los cables AB, AC y AD. ¿Cuáles son las tensiones en los
tres cables?
6 pies
C
8 pies
2 pies
3.65* Suponga que usted desea aplicar una fuerza F de 1000 lb
en el punto A con una dirección tal que las tensiones resultantes en
los cables AB, AC y AD sean iguales. Determine las componentes
de F.
B
A
3 pies
D
z
4 pies
y
8 pies
F
x
D (0, 6, 0) pies
A
(12, 4, 2) pies
C
B
(6, 0, 0) pies
(0, 4, 6) pies
x
Problema 3.67
z
Problemas 3.64/3.65
3.66 El disco A de 10 lb de metal está soportado por la superficie lisa inclinada y los cordones AB y AC. El disco se localiza
en las coordenadas (5, 1, 4) pies. ¿Cuáles son las tensiones en
los cordones?
y
B
3.68 Antes de su despegue, un globo que lleva un conjunto de
experimentos a gran altura se sostiene en su lugar por grupos
de estudiantes voluntarios que sostienen los tirantes en B, C y D.
La masa del globo, el paquete de experimentos y el gas que
contiene es de 90 kg, y la fuerza de flotación del globo es 1000 N.
El profesor supervisor estima de manera conservadora que cada
estudiante puede ejercer al menos una tensión de 40 N sobre el
tirante durante el intervalo de tiempo necesario. Con base en esta
estimación, ¿cuál es el número mínimo de estudiantes necesarios
en B, C y D?
(0, 6, 0) pies
C
y
(8, 4, 0) pies
2 pies
x
A
z
8 pies
10 pies
Problema 3.66
A (0, 8,0) m
C (10,0,12) m
D
(16,0,4) m
z
x
B (16,0,16) m
Problema 3.68
113
Problemas
3.69 La masa de 20 kg se suspende mediante cables unidos a tres
postes verticales de 2 m. El punto A está en (0, 12, 0) m. Determine las tensiones en los cables AB, AC y AD.
y
3.71 El automóvil de la figura a y la plataforma que lo sostiene
pesan 3000 lb. Están soportados por cuatro cables AB, AC, AD y
AE. Las ubicaciones de los puntos de unión sobre la plataforma se
muestran en la figura b. Las tensiones en los cables AB y AE son
iguales. Determine las tensiones en los cables.
C
y
B
D
A
A
(0, 10, 0) pies
1m
1m
2m
0.3 m
x
z
Problema 3.69
E
C
3.70 El peso de la sección de pared horizontal es W 20,000 lb.
Determine las tensiones en los cables AB, AC y AD.
z
B
x
(a)
8 pies
C
D
A
5 pies
4 pies
D
10 pies
6 pies
7 pies
x
6 pies
C
B
4 pies
14 pies
5 pies
8 pies
W
Problema 3.70
E
B
6 pies
5 pies
z
(b)
Problema 3.71
114
Capítulo 3 Fuerzas
3.72 La carga de 680 kg suspendida desde el helicóptero está
en equilibrio. La fuerza de arrastre aerodinámica sobre la carga
es horizontal. El eje y es vertical, y el cable OA pertenece al
plano x–y. Determine la magnitud de la fuerza de arrastre y las
tensiones en el cable OA.
3.75* El automóvil de 3400 lb que se muestra en la figura se
encuentra en reposo sobre la superficie plana. El vector unitario
en ⫽ 0.456i ⫹ 0.570j ⫹ 0.684k es perpendicular a la superficie.
Determine las magnitudes de la fuerza normal total N y la fuerza
de fricción total f ejercida sobre la superficie por las llantas
del auto.
3.73 Las coordenadas de los tres puntos de unión de los
cables B, C y D son (⫺3.3, ⫺4.5, 0) m, (1.1, ⫺5.3, 1) m y
(1.6, ⫺5.4, ⫺1) m, respectivamente. ¿Cuáles son las tensiones
en los cables OB, OC y OD?
y
en
x
y
A
z
10⬚
Problema 3.75
O
x
3.76 El sistema que se muestra en la figura ancla un puntal de
un techo suspendido por cables. Si la tensión en el cable AB es
de 900 kN, ¿cuáles son las tensiones en los cables EF y EG?
B
C
3.77* Cada uno de los cables del sistema que se muestra en la
figura puede soportar de manera segura una tensión de 1500 kN.
Con base en este criterio, ¿cuál es el valor seguro máximo de la
tensión en el cable AB?
D
Problemas 3.72/3.73
3.74 Si la masa de la barra AB es despreciable en comparación
con la masa del objeto E suspendido, la barra ejerce una fuerza
sobre la “bola” en B que apunta desde A hacia B. La masa del
objeto E es de 200 kg. El eje y apunta hacia arriba. Determine las
tensiones en los cables BC y BD.
Estrategia: Dibuje un diagrama de cuerpo libre de la bola
en B. (El peso de la bola es despreciable).
y
G
(0, 1.4, ⫺1.2) m
F
E
(2, 1, 0) m
(1, 1.2, 0) m
B
(0, 1.4, 1.2) m
y
D
B
(4, 3, 1) m
(0, 5, 5) m
A
(2.2, 0, ⫺1) m
(0, 4, ⫺3) m
C
D
z
C
(2.2, 0, 1) m
Problemas 3.76/3.77
x
A
E
z
Problema 3.74
(3.4, 1, 0) m
x
Problemas
3.78 El collarín de 200 kg en A es mantenido en su lugar sobre la
barra vertical lisa mediante el cable AB.
a) Determine la tensión en el cable.
b) Determine la fuerza ejercida por la barra sobre el collarín.
3.82* El collarín A de 10 kg y el collarín B de 20 kg se mantienen en su lugar sobre las barras lisas mediante el cable de 3 m
que va de A a B y la fuerza F que actúa sobre A. La fuerza F es
paralela a la barra. Determine F.
y
y
2m
(0, 5, 0) m
B
(0, 3, 0) m
F
A
3m
B
A
5m
(4, 0, 0) m
2m
z
z
Problema 3.78
3.79 En el ejemplo 3.6, suponga que el cable AC se reemplaza
por uno más largo, de manera que la distancia desde el punto B
hasta el collarín C aumenta de 6 a 8 pies. Determine la tensión en
el cable.
3.80 El cable AB mantiene en su lugar al collar A de 8 kg sobre
la barra lisa CD. El eje y apunta hacia arriba. ¿Cuál es la tensión
en el cable?
3.81* Determine la magnitud de la fuerza normal ejercida por la
barra lisa sobre el collarín A.
y
0.15 m
0.4 m
B
C
0.2 m 0.3 m
A
0.5 m
O
D
x
0.25 m
0.2 m
z
Problemas 3.80/3.81
(0, 0, 4) m
Problema 3.82
x
2m
115
x
116
Capítulo 3 Fuerzas
Problemas de repaso
3.83 La caja de 100 lb que se muestra en la figura es mantenida
en equilibrio sobre la superficie lisa por la cuerda AB. Determine
la tensión en la cuerda y la magnitud de la fuerza normal ejercida
por la superficie sobre la caja.
3.85 El motor de 400 lb que se muestra en la figura está suspendido por los cables AB y AC. Si usted no desea que TAB ni TAC sean
mayores a 400 lb, ¿cuál es el valor mínimo aceptable del ángulo a?
y
TAB
B
TAC
C
a
A
a
A
45⬚
A
x
B
400 lb
30⬚
Problema 3.85
Problema 3.83
3.86 El cable AB mostrado es horizontal y la caja de la derecha
pesa 100 lb. Las superficies son lisas.
3.84 El sistema mostrado se llama tracción de Russell. Si la
suma de las fuerzas hacia abajo ejercidas en A y B por las
piernas del paciente es de 32.2 lb, ¿cuál es el peso W?
a) ¿Cuál es la tensión en el cable?
b) ¿Cuál es el peso de la caja de la izquierda?
A
y
B
20⬚
40⬚
25⬚
Problema 3.86
60⬚
20⬚
3.87 Suponga que las fuerzas ejercidas sobre el alpinista de
170 lb que se muestra en la figura, por las paredes inclinadas
de la “chimenea”, son perpendiculares a las paredes. Si él está
en equilibrio y ejerce una fuerza de 160 lb sobre la cuerda,
¿cuáles son las magnitudes de las fuerzas ejercidas sobre el
alpinista por las paredes izquierda y derecha?
B
A
W
10⬚
x
Problema 3.84
3⬚
4⬚
Problema 3.87
Problemas de repaso
3.88 La masa del objeto suspendido A es mA y las masas de las
poleas son insignificantes. Determine la fuerza T necesaria para
que el sistema esté en equilibrio.
117
3.90 La masa del bloque A que se muestra en la figura es de
42 kg, y la masa del bloque B es de 50 kg. Las superficies son
lisas. Si los bloques están en equilibrio, ¿qué valor tiene la
fuerza F?
B
F
45
A
20
Problema 3.90
T
A
Problema 3.88
3.89 El ensamble A mostrado, que incluye la polea, pesa 60 lb.
¿Qué fuerza F se necesita para que el sistema esté en equilibrio?
3.91 El alpinista A está recibiendo ayuda de dos compañeros
para subir la pendiente de hielo. Su masa es de 80 kg y los
cosenos directores de la fuerza ejercida sobre él por la pendiente son cos ux 0.286, cos uy 0.429 y cos uz 0.857. El
eje y es vertical. Si el alpinista está en equilibrio en la posición
mostrada, ¿cuáles son las tensiones en las cuerdas AB y AC, y
cuál es la magnitud de la fuerza ejercida por la pendiente sobre
el alpinista?
3.92 Considere al alpinista A que está siendo ayudado por sus
compañeros en el problema 3.91. Para tratar de que las tensiones
en las cuerdas sean menos desiguales, el alpinista B se mueve a
la posición (4, 2, 0) m. ¿Cuáles son las nuevas tensiones en las
cuerdas AB y AC, y cuál es la magnitud de la fuerza ejercida por
la pendiente sobre el alpinista?
y
F
B
(2, 2, 0) m
C
(5, 2, 1) m
A
z
Problema 3.89
A
(3, 0, 4) m
Problemas 3.91/3.92
x
118
Capítulo 3 Fuerzas
3.93 Un alpinista ayuda a subir a su amigo, quien jala una caja
de suministros por una pendiente con hielo. Si la masa del amigo
es de 90 kg y la masa de los suministros es de 22 kg, ¿cuáles son
las tensiones en las cuerdas AB y CD? Suponga que la pendiente
es lisa, es decir, que sólo la pendiente ejerce fuerzas normales
sobre el hombre y la caja.
3.96 Para soportar la tienda de campaña mostrada, la tensión en
la cuerda AB debe ser de 35 lb. ¿Cuáles son las tensiones en las
cuerdas AC, AD y AE?
y
A
20⬚
B
(0, 5, 0) pies
C
C
(0, 6, 6) pies
40⬚
(6, 4, 3) pies
A
B
(8, 4, 3) pies
D
75°
x
E
(3, 0, 3) pies
D
60⬚
z
Problema 3.93
3.94 El automóvil de 2800 lb se mueve a velocidad constante
sobre un camino con la pendiente que se muestra en la figura. Las
fuerzas aerodinámicas sobre el auto son el arrastre D ⫽ 270 lb, el
cual es paralelo al camino y la elevación L ⫽ 120 lb, que es perpendicular al camino. Determine las magnitudes de las fuerzas totales
normal y de fricción ejercidas por el camino sobre el automóvil.
Problema 3.96
3.97 El cable AB de la figura está unido a la parte superior del
poste vertical de 3 m de altura y su tensión es de 50 kN. ¿Cuáles
son las tensiones en los cables AO, AC y AD?
y
5m
L
D
5m
C
D
15⬚
4m
Problema 3.94
8m
3.95 Un ingeniero que realiza estudios preliminares para el diseño de un nuevo radiotelescopio proyectó una plataforma triangular
suspendida por cables apoyados en tres torres de 40 m de altura
igualmente espaciadas. La plataforma tiene una masa de 20 Mg
(megagramos) y está 10 m abajo del punto más alto de las torres.
¿A qué tensión están sometidos los cables?
(6, 2, 0) m B
O
A
z
12 m
x
Problema 3.97
VISTA SUPERIOR
20 m
65 m
Problema 3.95
3m
Problemas de repaso
3.98* El automóvil de 1350 kg que se muestra en la figura está
en reposo sobre una superficie plana con los frenos activados. El
vector unitario en ⫽ 0.231i ⫹ 0.923j ⫹ 0.308k es perpendicular a
la superficie. El eje y apunta hacia arriba. Los cosenos directores
del cable que va de A a B son cos ux ⫽ ⫺0.816, cos uy ⫽ 0.408,
cos uz ⫽ ⫺0.408, y la tensión en el cable es de 1.2 kN. Determine
las magnitudes de las fuerzas normal y de fricción que ejercen las
llantas del automóvil sobre la superficie.
3.99* Los frenos del automóvil del problema 3.98 se sueltan, y el
auto se mantiene en equilibrio sobre la superficie plana mediante
el cable AB. Las ruedas frontales se alinean de manera que las
llantas no ejercen fuerzas de fricción paralelas al eje longitudinal
del automóvil. El vector unitario ep ⫽ ⫺0.941i ⫹ 0.131j ⫹ 0.314k
es paralelo a la superficie plana y está alineado con el eje
longitudinal del auto. ¿Cuál es la tensión en el cable?
Proyecto de diseño 1 En la figura se muestra un posible
diseño para una báscula simple con la que se desea pesar objetos. La longitud del resorte AB es 0.5 m. Cuando un objeto se
coloca en el plato, el resorte se elonga y el cordón AB gira. El
peso del objeto puede determinarse mediante la observación
del cambio en el ángulo a.
119
y
en
B
ep
A
x
z
Problemas 3.98/3.99
b) Suponga que puede usar los mismos componentes —el plato,
el transportador, un resorte, un cordón— así como una o más
poleas. Sugiera otra posible configuración para la báscula. Use
la estática para analizar su configuración propuesta y compare
su exactitud con la de la configuración mostrada en la figura
para objetos con masas en el rango de 0.2 a 2 kg.
Proyecto de diseño 2 Suponga que las posiciones de los
1m
B
C
a
A
puntos A, C y D del sistema de cables, de donde pende la masa
de 100 kg, están fijos. Sin embargo, usted tiene la libertad de
elegir las coordenadas x y z del punto B. Investigue los efectos
sobre las tensiones en los cables de diferentes opciones para la
ubicación del punto B. Si el costo del cable AB es proporcional
al producto de la tensión en el cable y su longitud, investigue
el efecto sobre el costo del cable de las diferentes opciones
para la ubicación del punto B. Escriba un reporte breve donde
describa los resultados de sus investigaciones y recomiende
una ubicación para el punto B.
y
C
(⫺2, 0, ⫺2) m
x
B
(⫺3, 0, 3) m
D
a) Suponga que se pesarán objetos con masas en el rango de
0.2 a 2 kg. Elija la longitud sin elongar y la constante del resorte con el propósito de obtener lecturas exactas de los pesos
en el rango deseado (ignore los pesos del plato y el resorte;
observe que, para determinar el peso de manera exacta, es
necesario un cambio significativo en el ángulo a).
(x, 0, z) m
z
A
(0, ⫺4, 0) m
100 kg
CAPÍTULO
4
Sistemas de fuerzas y momentos
Los efectos de las fuerzas dependen no sólo de sus magnitudes y direcciones, sino también de los momentos o
pares de torsión que ejercen. Los giros de objetos como
las ruedas de un vehículo, el cigüeñal de un motor y el
rotor de un generador eléctrico resultan de los momentos
de las fuerzas ejercidas sobre ellos. Si un objeto está en
equilibrio, el momento con respecto a cualquier punto
debido a las fuerzas actuantes sobre el cuerpo es igual a
cero. Antes de continuar con el estudio del diagrama
de cuerpo libre y del equilibrio, es necesario entender
cómo calcular los momentos e introducir el concepto de
sistemas equivalentes de fuerzas y momentos.
El contrapeso de la grúa de construcción ejerce un gran momento que la
estructura de la grúa debe soportar durante el ensamble. En este capítulo se
calculan momentos de fuerzas y se analizan sistemas de fuerzas y momentos.
122
Capítulo 4 Sistemas de fuerzas y momentos
4.1 Descripción bidimensional del momento
ANTECEDENTES
Considere una fuerza de magnitud F y un punto P, y una vista en la dirección perpendicular al plano que los contiene (figura 4.1a). La magnitud del momento de la
fuerza respecto a P es el producto DF, donde D es la distancia perpendicular de
P a la línea de acción de la fuerza (figura 4.1b). En este ejemplo, la fuerza tendería
a causar un giro en sentido contrario al movimiento de las manecillas del reloj alrededor del punto P. Es decir, si se imagina que la fuerza actúa sobre un objeto que
puede girar alrededor del punto P, la fuerza generará un giro en sentido contrario al
F
Figura 4.1
(a) La fuerza y el punto P.
(b) Distancia perpendicular D del punto P a la
línea de acción de F.
(c) La dirección del momento es en sentido
contrario al movimiento de las manecillas
del reloj.
P
F
P
F
P
D
(a)
(b)
(c)
movimiento de las manecillas del reloj (figura 4.1c). Se dice que la dirección del
momento es contraria al sentido de las manecillas del reloj. Se definen los momentos en sentido contrario al movimiento de las manecillas del reloj como positivos y
los momentos en el sentido del movimiento de las manecillas del reloj como negativos. (Ésta es la convención usual, aunque se encontrarán situaciones en las que
será más conveniente definir los momentos en sentido del movimiento de las manecillas del reloj como positivos.) Así, el momento de la fuerza respecto a P es
MP = DF.
P
W
D1
(a)
P
W
D2
(b)
Figura 4.2
(a) La colocación del televisor cerca de la
pared minimiza el momento ejercido sobre
el soporte de la repisa en P.
(b) La colocación del televisor lejos de la pared
ejerce un gran momento sobre el soporte
en P y podría ocasionar que éste fallase.
(4.1)
Observe que si la línea de acción de F pasa por P, la distancia perpendicular D 0
y el momento de F respecto a P también es igual a cero.
Las dimensiones del momento son (distancia) (fuerza). Por ejemplo, los
momentos pueden expresarse en newton-metro en unidades SI y en lb-pie en las
unidades de uso común en Estados Unidos.
Suponga que se desea colocar un televisor en una repisa, pero no se tiene la
seguridad de que la unión de la repisa a la pared sea suficientemente fuerte para
resistir la carga. De manera intuitiva, se colocará el aparato cerca de la pared
(figura 4.2a), sabiendo que es más probable que la conexión falle si se coloca
lejos de ella (figura 4.2b). ¿Cuál es la diferencia en los dos casos? La magnitud
y la dirección de la fuerza ejercida sobre la repisa por el peso del televisor son
las mismas en ambos casos, pero los momentos ejercidos sobre la unión son diferentes. El momento ejercido respecto a P por el peso, cuando éste se halla cerca
de la pared, MP D1W, es de menor magnitud que el momento respecto a P
cuando el peso está lejos de la pared, MP D2W.
El método descrito en esta sección puede usarse para determinar la suma de
los momentos de un sistema de fuerzas respecto a un punto si éstas son bidimensionales (coplanares) y el punto se encuentra en el mismo plano. Por ejemplo,
considere la grúa para construcción que se muestra en la figura 4.3. La suma de
los momentos ejercidos respecto al punto P por la carga W1 y el contrapeso W2 es
©MP = D1W1 - D2W2.
Este momento tiende a ocasionar que la parte superior de la torre vertical gire, lo cual
podría ocasionar su colapso. Si la distancia D2 se ajusta de modo que D1W1 D2W2,
el momento respecto al punto P debido a la carga y al contrapeso será igual a cero.
4.1 Descripción bidimensional del momento
123
PP
W2
W1
D1
Figura 4.3
Grúa de torre usada en la construcción de
edificios altos.
D2
Si una fuerza se expresa en términos de sus componentes, el momento de
la fuerza respecto a un punto P es igual a la suma de los momentos de sus componentes respecto a P. En la próxima sección se demostrará este resultado que
es de gran utilidad.
RESULTADOS
F
Tanto el vector fuerza de magnitud F como el
punto P , están contenidos en el plano de la página.
P
F
Magnitud del momento
La magnitud del momento de F respecto a P es el
producto DF, donde D es la distancia perpendicular
desde P hasta la línea de acción de F.
P
D
Dirección y signo del momento
Se dice que la dirección del momento es contraria al sentido de las
manecillas del reloj si F tendiera a rotar un objeto clavado en P en
dirección contraria a las manecillas del reloj con respecto a P.
Excepto donde se establezca lo contrario, se define a los momentos
en sentido contrario al movimiento de las manecillas del reloj como
positivos y a los momentos en sentido del movimiento de las
manecillas del reloj como negativos. Así, el momento de la fuerza
mostrada respecto a P es
MP DF.
(4.1)
F
P
y
F
Si F se expresa en términos de sus
componentes, el momento de F respecto a P
es igual a la suma de los momentos de las
componentes de F respecto a P.
P
x
124
Capítulo 4 Sistemas de fuerzas y momentos
Ejemplo activo 4.1
Determinación de un momento ( Relacionado con el problema 4.1)
¿Cuál es el momento de la fuerza de 40 kN que se muestra en la figura respecto al
punto A?
40 kN
30°
A
6m
Estrategia
La magnitud del momento puede calcularse determinando la distancia perpendicular del punto A a la línea de acción de la fuerza.
Solución
40 kN
6m
30
A
D
La distancia perpendicular de A a la línea de
acción de la fuerza es
D (6 m)sen30 3m.
Por lo tanto la magnitud del momento es
(3 m)(40 kN) 120 kN-m.
La dirección del momento es en sentido
contrario a las manecillas del reloj, por lo tanto,
MA 120 kN-m.
Problema de práctica Descomponga la fuerza de 40 kN en sus componentes horizontal y vertical, y calcule la suma de los momentos de las componentes respecto a A.
Respuesta: 120 kN-m.
Ejemplo 4.2
Momento de un sistema de fuerzas ( Relacionado con el problema 4.12)
4 kN
Cuatro fuerzas actúan sobre la parte de máquina que se muestra en la figura.
¿Qué valor tiene la suma de los momentos de las fuerzas respecto al origen O?
30
2 kN
300 mm
O 3 kN
300 mm
5 kN
Estrategia
Se pueden determinar los momentos de las fuerzas respecto al punto O directamente de la información dada excepto para la fuerza de 4 kN. Se determinará su
momento expresándolas en términos de sus componentes y sumando los momentos de las componentes.
400 mm
Solución
Momento de la fuerza de 3 kN La línea de acción de la fuerza de 3 kN pasa
por O. No ejerce momento respecto a O.
4.1 Descripción bidimensional del momento
Momento de la fuerza de 5 kN La línea de acción de la fuerza de 5 kN también
pasa por O. Tampoco ejerce momento respecto a O.
Momento de la fuerza de 2 kN La distancia perpendicular de O a la línea de
acción de la fuerza de 2 kN es 0.3 m, y el sentido del momento respecto a O es
en sentido del movimiento de las manecillas del reloj. El momento de la fuerza
de 2 kN respecto a O es
-10.3 m212 kN2 = - 0.600 kN-m.
(Observe que la distancia perpendicular se convirtió de milímetros a metros, con
lo que se obtuvo el resultado en términos de kilonewton-metros.)
Momento de la fuerza de 4 kN En la figura a se introduce un sistema coordenado y la fuerza de 4 kN se expresa en términos de sus componentes x e y. La distancia perpendicular de O a la línea de acción de la componente x es de 0.3 m, y
la dirección del momento respecto a O es en el sentido del movimiento de las manecillas del reloj. El momento de la componente x respecto a O es
-10.3 m214 cos 30° kN2 = - 1.039 kN-m.
y
4 sen 30 kN
300
mm
2 kN
O
3 kN
300
mm
4 kN
4 cos 30 kN
x
5 kN
400
mm
(a) Descomposición de la fuerza de 4 kN en
sus componentes.
La distancia perpendicular del punto O a la línea de acción de la componente y
es de 0.7 m, y el sentido del momento respecto a O es en sentido contrario al
movimiento de las manecillas del reloj. El momento de la componente y respecto
a O es
(0.7 m)(4 sen 30° kN) 1.400 kN-m.
La suma de los momentos de las cuatro fuerzas respecto a O es
©M0 = - 0.600 - 1.039 + 1.400 = - 0.239 kN-m.
Las cuatro fuerzas ejercen un momento en sentido del movimiento de las manecillas del reloj de 0.239 kN-m respecto al punto O.
Razonamiento crítico
Si un objeto está sometido a un sistema de fuerzas conocidas, ¿por qué es útil
determinar la suma de los momentos de las fuerzas respecto a un punto dado?
Como se analizará en el capítulo 5, el objeto está en equilibrio sólo si la suma de
los momentos respecto a cualquier punto es igual a cero, entonces el cálculo de la
suma de los momentos proporciona una prueba para el equilibrio (observe que el
objeto de este ejemplo no está en equilibrio). Es más: en dinámica puede determinarse la suma de los momentos de las fuerzas que actúan sobre los objetos para
analizar sus movimientos angulares.
125
126
Capítulo 4 Sistemas de fuerzas y momentos
Suma de momentos para determinar una fuerza desconocida ( Relacionado con el
Ejemplo 4.3
problema 4.23)
B
El peso W 300 lb. La suma de los momentos respecto a C debido al peso W y
de la fuerza ejercida sobre la barra CA por el cable AB es igual a cero. ¿Cuál es la
tensión en el cable?
A
7 pies
Estrategia
Sea T la tensión en el cable AB. Usando las dimensiones dadas es posible expresar
las componentes horizontal y vertical de la fuerza ejercida sobre la barra por el cable
en términos de T. Después, igualando a cero la suma de los momentos respecto a C
debidos al peso de la barra y la fuerza ejercida por el cable, puede obtenerse una ecuación para T.
4 pies
W
C
2 pies
2 pies
Solución
Usando triángulos semejantes, se expresa la fuerza ejercida sobre la barra por el
cable en términos de sus componentes horizontal y vertical (figura a). La suma de
los momentos respecto a C debidos al peso de la barra y a la fuerza ejercida por el
cable AB es
B
3
T
5
A
T
3 pies
4
3
©MC = 4 a Tb + 4a Tb - 2W = 0.
5
5
4
T
5
Despejando T se obtiene
4 pies
T = 0.357W = 107.1 lb.
W
C
2
pies
Razonamiento crítico
Este ejemplo es un precedente de las aplicaciones que se considerarán en el capítulo 5 y demuestra por qué es necesario saber cómo calcular momentos de fuerzas.
Si la barra está en equilibrio, la suma de los momentos respecto a C es cero. La
aplicación de esta condición permite determinar la tensión en el cable. ¿Por qué es
necesario considerar la fuerza ejercida sobre la barra por su soporte en C? Porque
se sabe que el momento de esa fuerza respecto a C es igual a cero.
2
pies
(a) Descomposición de la fuerza
ejercida por el cable en sus
componentes horizontal y
vertical.
Problemas
4.1 En el ejemplo activo 4.1, la fuerza de 40 N apunta 30° por
encima de la horizontal. Ahora suponga que la fuerza apunta 30°
por debajo de la horizontal. Trace un bosquejo de la viga con la
nueva orientación de la fuerza. ¿Cuál es el momento de la fuerza
respecto al punto A?
4.3 Las ruedas de la grúa aérea ejercen fuerzas descendentes
sobre la viga horizontal I en B y C. La fuerza en B es de 40 kip
y la fuerza en C es de 44 kip; determine la suma de los momentos de las fuerzas sobre la viga respecto a) al punto A y b) al
punto D.
4.2 La masa m1 20 kg. La magnitud del momento total respecto
a B debido a las fuerzas ejercidas sobre la barra AB por los pesos
de las dos masas suspendidas es 170 N-m. ¿Cuál es la magnitud
del momento total debido a las fuerzas respecto al punto A?
0.35 m
0.35 m
10
pies
15 pies
25 pies
0.35 m
A
A
B
C
B
m1
m2
Problema 4.2
Problema 4.3
D
127
Problemas
4.4 ¿Cuál es la fuerza F aplicada a las pinzas que se requiere para
ejercer un momento de 4 N-m respecto al centro del perno en P?
4.6 La fuerza F = 8 kN. ¿Cuál es el momento de la fuerza respecto al punto P?
4.7 Si la magnitud del momento debido a la fuerza F respecto a
Q es 30 kN-m, ¿cuál es el valor de F?
y
(3, 7) m
F
Q
(8, 5) m
P
(3, 2) m
(7, 2) m
x
Problemas 4.6/4.7
P
4.8 El soporte en el extremo izquierdo de la viga fallará si el momento respecto a A de la fuerza de 15 kN es mayor a 18 kN-m. Con
base en este criterio, ¿cuál la longitud máxima permisible de la viga?
F
F
165
mm
30
B
A
42
25
Problema 4.4
Problema 4.8
4.5 Dos fuerzas de igual magnitud F se aplican sobre la llave
según se muestra en la figura. Si se requiere un momento de
50 N-m para aflojar la tuerca, ¿cuál es el valor necesario de F?
4.9 La barra AP tiene una longitud de 650 mm. El radio de la
polea mide 120 mm. Se aplican fuerzas iguales T 50 kN en los
extremos del cable. ¿Cuál es el valor de la suma de los momentos
de las fuerzas a) respecto a A; b) respecto a P?
45
A
30
T
T
F
F
F
300 mm
380 mm
30
20
F
Problema 4.5
P
45
Problema 4.9
128
Capítulo 4 Sistemas de fuerzas y momentos
4.10 La fuerza F = 12 kN. Un ingeniero estructural determina
que la magnitud del momento debido a F respecto a P no debe exceder 5 kN-m. ¿Cuál es el rango aceptable del ángulo a? Suponga
que 0 a 90°.
4.14 El momento ejercido respecto al punto E por el peso es
de 299 pulg-lb. ¿Cuál es el momento que ejerce el peso respecto
al punto S?
F
a
lg
S
13
30
1m
12
P
E
pu
pu
40
lg
2m
Problema 4.10
Problema 4.14
4.11 La longitud de la barra AB es 350 mm. Los momentos
ejercidos respecto a los puntos B y C por la fuerza vertical F
son MB 1.75 kN-m y MC 4.20 kN-m. Determine la
fuerza F y la longitud de la barra AC.
4.15 Las magnitudes de las fuerzas ejercidas sobre el pilar D
mediante los cables A, B y C son iguales: FA FB FC.
La magnitud del momento total respecto a E debido a las fuerzas
ejercidas mediante los tres cables en D es 1350 kN-m. ¿Cuál es el
valor de FA?
B
D
30°
FC
D
C
20°
FA
A
FB
6m
A
F
B
C
E
Problema 4.11
4m
4m
4m
4.12 En el ejemplo 4.2, suponga que la fuerza de 2 kN apunta
hacia arriba en vez de hacia abajo. Trace un bosquejo de la parte de
máquina donde se muestren las orientaciones de las fuerzas. ¿Cuál
es la suma de los momentos de las fuerzas respecto al origen O?
Problema 4.15
4.16 Tres fuerzas actúan sobre la tubería. Determine la suma de
los momentos de las tres fuerzas respecto al punto P.
4.13 Dos fuerzas iguales y opuestas actúan sobre la viga. Determine la suma de los momentos de las dos fuerzas a) respecto
al punto P; b) respecto al punto Q, y c) respecto al punto coordenado x 7 m, y 5 m.
2 kN
2 kN
4 kN
y
40 N
P
30
2m
30
40 N
P
Q
x
0.2 m
0.2 m
2m
Problema 4.13
20
Problema 4.16
0.2 m
0.2 m
129
Problemas
4.17 Las fuerzas F1 = 30 N, F2 = 80 N y F3 = 40 N. ¿Cuál es la
suma de los momentos de las fuerzas respecto al punto A?
4.18 La fuerza F1 = 30 N. La suma vectorial de las tres fuerzas es
igual a cero. ¿Cuál es la suma de los momentos de las fuerzas
respecto al punto A?
y
4.22 Cinco fuerzas actúan sobre la tubería que se muestra en la
figura. La suma vectorial de las fuerzas es igual a cero y la suma
de los momentos de las fuerzas respecto a P también es cero.
(a) Determine las fuerzas A, B y C.
(b) Determine la suma de los momentos de las fuerzas respecto al
punto Q.
F3
A
80 lb
C
30
45
F1
2m
y
2 pies
B
20 lb
45
Q
F2
x
A
8m
P
C
x
Problemas 4.17/4.18
B
4.19 Las fuerzas FA 30 lb, FB 40 lb, FC 20 lb y FD 30
lb. ¿Cuál es la suma de los momentos de las fuerzas respecto al
origen del sistema coordenado?
2 pies
2 pies
2 pies
Problema 4.22
4.20 La fuerza FA 30 lb. La suma vectorial de las fuerzas sobre
la viga es igual a cero, y la suma de los momentos de las fuerzas
respecto al origen del sistema de coordenadas es cero. a) Determine
las fuerzas FB, FC y FD. b) Determine la suma de los momentos
de las fuerzas respecto al extremo derecho de la viga.
4.23 En el ejemplo 4.3, suponga que la unión en el punto B
se mueve hacia arriba y el cable se alarga de tal manera que la
distancia de C a B es de 9 pies. (Las posiciones de los puntos C
y A no cambin.) Trace un bosquejo del sistema con el cable en
su nueva posición. ¿Cuál es la tensión en el cable?
y
FD
30
x
FA
FB
6 pies
FC
A
4 pies
Problemas 4.19/4.20
4.21 Tres fuerzas actúan sobre el automóvil que se muestra en
la figura. La suma de las fuerzas es igual a cero y la suma de los
momentos de las fuerzas respecto al punto P también es cero.
a) Determine los valores de las fuerzas A y B.
b) Determine la suma de los momentos de las fuerzas respecto al
punto Q.
y
6 pies
3 pies
x
B
P
4.24 La tensión en el cable es la misma en ambos lados de la
polea. La suma de los momentos respecto al punto A debidos a
la fuerza de 800 lb y a las fuerzas ejercidas sobre la barra por el
cable en B y C es igual a cero. ¿Cuál es la tensión en el cable?
2800 lb
Problema 4.21
Q
A
B
30°
30 pulg
30 pulg
800 lb
30 pulg
Problema 4.24
C
130
Capítulo 4 Sistemas de fuerzas y momentos
4.25 Los pesos de 160 N de los brazos AB y BC del manipulador
robótico mostrado actúan en sus puntos medios. Determine la
suma de los momentos de los tres pesos respecto a A.
150
mm
600
mm
20
40 N
C
4.28 Cinco fuerzas actúan sobre un eslabón en el mecanismo de
cambio de velocidad de una podadora de césped. La suma vectorial de las cinco fuerzas sobre la barra es igual a cero. La suma de
sus momentos respecto al punto en que actúan las fuerzas Ax y Ay
también es cero.
a) Determine las fuerzas Ax, Ay y B.
b) Determine la suma de los momentos de las fuerzas respecto al
punto en que actúa la fuerza B.
B
Ay
m
0m
40
60
Ax
160 N
25 kN
20
650 mm
30 kN
160 N
A
450 mm
45
B
Problema 4.25
650 mm
4.26 Los impulsores de posición del trasbordador espacial mostrado en la figura ejercen dos fuerzas de magnitud F 7.70 kN. ¿Qué
momento ejercen los impulsores respecto al centro de masa G?
2.2 m
2.2 m
F
F
G
5
Problema 4.28
4.29 Cinco fuerzas actúan sobre el modelo de una armadura
construida por un estudiante de ingeniería civil. Las dimensiones
son b 300 mm y h 400 mm; F 100 N. La suma de los momentos de las fuerzas respecto al punto en que actúan Ax y Ay es
igual a cero. Si el peso de la armadura es insignificante, ¿qué
valor tiene la fuerza B?
6
18 m
12 m
Problema 4.26
4.27 La fuerza F ejerce un momento en sentido contrario al movimiento de las manecillas del reloj de 200 pies-lb respecto a A y
un momento en sentido del movimiento de las manecillas del reloj
de 100 pie-lb respecto a B. ¿Qué valor tienen F y u?
A
(5, 5)
pies
350 mm
4.30 Las dimensiones en la figura son b 3 pies y h 4 pies;
F 300 lb. La suma vectorial de las fuerzas que actúan sobre
la armadura es igual a cero, y la suma de los momentos de las
fuerzas respecto al punto en que actúan Ax y Ay también es cero.
a) Determine las fuerzas Ax, Ay y B.
b) Determine la suma de los momentos de las fuerzas respecto al
punto en que actúa la fuerza B.
F
y
F
60
60
F
u
h
(4, 3) pies
Ax
x
Ay
b
b
b
b
b
Problemas 4.29/4.30
B
(3, 4) pies
Problema 4.27
b
B
Problemas
4.31 La masa m = 70 kg. ¿Qué valor tiene el momento respecto a
A debido a la fuerza ejercida por el cable sobre la viga en B?
B
A
131
4.34 A un participante en una competencia de lanzamiento de cebos
artificiales se le engancha en el césped el hilo de la caña de pescar.
Si la tensión en el hilo es de 5 lb, ¿qué momento ejerce la fuerza
del hilo sobre la vara respecto al punto H, donde el participante
sostiene la vara?
45
30
3m
H
m
4 pies
6 pies
Problema 4.31
7 pies
4.32 Los pesos W1 y W2 están suspendidos por el sistema de
cables que se muestra en la figura. El peso W1 12 lb. El cable
BC es horizontal. Determine el momento respecto al punto P
debido a la fuerza ejercida sobre el poste vertical en D mediante
el cable CD.
A
D
15 pies
Problema 4.34
4.35 Los cables AB y AC ayudan a sostener la torre mostrada. La
tensión en el cable AB es de 5 kN. Los puntos A, B, C y O están
contenidos en el mismo plano vertical. a) ¿Cuál es el momento
respecto a O debido a la fuerza ejercida sobre la torre por el cable
AB? b) Si la suma de los momentos respecto a O debidos a fuerzas
ejercidas sobre la torre por los dos cables es igual a cero, ¿cuál es
la tensión en el cable AC?
A
B
50
6 pies
C
20 m
W2
W1
P
60
45
Problema 4.32
C
4.33 La barra AB que se muestra en la figura ejerce una fuerza
en B que ayuda a soportar el muro vertical de retención. La fuerza es paralela a la barra. El ingeniero civil quiere que la barra
ejerza un momento de 38 kN-m respecto a O. ¿Cuál es la magnitud de la fuerza que debe ejercer la barra?
O
B
Problema 4.35
4.36 El cable que va desde B hasta A en el velero mostrado en la
figura ejerce una fuerza de 230 N en B. El cable de B a C ejerce
una fuerza de 660 N en B. La parte inferior del mástil del velero
está ubicado en x 4 m, y 0. ¿Cuál es la suma de los momentos respecto a la parte inferior del mástil debido a las fuerzas ejercidas en B por los dos cables?
y
B (4, 13) m
B
4m
A
1m
O
1m
3m
Problema 4.33
C
(9, 1) m
A
(0, 1.2) m
Problema 4.36
x
132
Capítulo 4 Sistemas de fuerzas y momentos
4.37 El cable AB de la figura ejerce una fuerza de 290 kN
sobre el larguero de la grúa en B. El cable AC ejerce una fuerza
de 148 kN sobre el larguero en C. Determine la suma de los momentos respecto a P debidos a las fuerzas que ejercen los cables
AB y AC sobre el larguero.
4.39 La masa combinada del carrito para equipaje y la maleta
que se muestran en la figura es de 12 kg. Su peso actúa en A. La
suma de los momentos respecto al origen del sistema coordenado
debidos al peso que actúa en A y la fuerza vertical F aplicada en
el asa del cargador es igual a cero. Determine la fuerza F (a) si
a 30°; (b) si a 50°.
4.38 La masa del larguero de la grúa que se muestra en la figura
es de 9000 kg. Su peso actúa en G. La suma de los momentos
respecto a P debidos al peso del larguero, a la fuerza ejercida en
B por el cable AB y a la fuerza ejercida en C por el cable AC es
igual a cero. Suponga que las tensiones en los cables AB y AC
son iguales. Determine la tensión en los cables.
F
x
A
B
Larguero
8m
C
G
16 m
y
0.28 m
0.14 m
1.2 m
A
P
38 m
a
56 m
C
Problema 4.39
4.40 El cilindro hidráulico BC que se muestra en la figura
ejerce una fuerza de 300 kN sobre el larguero de la grúa en C.
La fuerza es paralela al cilindro. ¿Cuál es el momento de la
fuerza respecto a A?
C
2.4 m
Problemas 4.37/4.38
1m
A
B
1.8 m
1.2 m
7m
Problema 4.40
Problemas
4.41 El pistón hidráulico AB que se muestra en la figura ejerce
una fuerza de 400 lb sobre la escalera en B en la dirección paralela
al pistón. La suma de los momentos respecto a C debidos a la
fuerza ejercida sobre la escalera por el pistón y el peso W de la
escalera es igual a cero. ¿Cuál es el peso de la escalera?
133
4.42 El cilindro hidráulico que se muestra en la figura ejerce una
fuerza de 8 kN en B que es paralela al cilindro y apunta desde C
hacia B. Determine los momentos de la fuerza respecto a los
puntos A y D.
1m
D
C
Cilindro
hidráulico
6 pies
1m
0.6 m
W
3 pies
B
A
A
B
C
0.6 m
6 pies
Pala
0.15 m
3
pies
Problema 4.42
Problema 4.41
4.43 La estructura mostrada en el diagrama es una de dos estructuras idénticas que soportan la pala de una excavadora. La barra BC
ejerce una fuerza de 700 N en C que apunta desde C hacia B. ¿Qué valor tiene el momento de esta fuerza respecto a K?
4.44 La barra BC de la figura ejerce una fuerza en C que apunta desde C hasta B. El cilindro hidráulico DH ejerce una fuerza de
1550 N en D que apunta desde D hacia H. La suma de los momentos de estas dos fuerzas respecto a K es igual a cero. ¿Cuál es la
magnitud de la fuerza que ejerce la barra BC en C?
320
mm
Eje
100
mm
C
Pala
260
mm
H
B
180
260 mm
mm
J
D
160
mm
L
K
1040
mm 1120
mm
Problemas 4.43/4.44
380
mm
134
Capítulo 4 Sistemas de fuerzas y momentos
4.2 Vector de momento
ANTECEDENTES
F
P
(a)
El momento de una fuerza respecto a un punto es un vector. En esta sección se
define dicho vector y se explica la forma de evaluarlo. Después se demuestra que
al usar la descripción bidimensional del momento según la sección 4.1, se especifican la magnitud y la dirección del vector de momento.
Considere un vector de fuerza F y un punto P (figura 4.4a). El momento de F
respecto a P es el vector
MP = r * F,
F
P
r
(4.2)
donde r es un vector de posición de P a cualquier punto sobre la línea de acción
de F (figura 4.4b).
Magnitud del momento
A partir de la definición del producto cruz, la magnitud de MP es
(b)
MP rF sen u,
F
u
r
P
donde u es el ángulo entre los vectores r y F cuando se colocan cola con cola. La
distancia perpendicular de P a la línea de acción de F es D r sen u (figura
4.4c). Por consiguiente, la magnitud del momento MP es igual al producto de la
distancia perpendicular de P a la línea de acción de F y la magnitud de F:
ƒ MP ƒ = D ƒ F ƒ .
u
D
(c)
Figura 4.4
(a) La fuerza F y un punto P.
(b) Vector r de P a un punto sobre la línea de
acción de F.
(c) El ángulo u y la distancia perpendicular D.
(4.3)
Observe que si se conocen los vectores MP y F, con esta ecuación se puede encontrar la distancia perpendicular D.
Dirección del momento
Se sabe, por la definición del producto cruz, que MP es perpendicular a r y a F.
Esto significa que MP es perpendicular al plano que contiene a P y a F (figura
4.5a). Observe en esta figura que un momento se denota con una flecha circular
alrededor del vector.
MP
F
F
MP
r
r
P
Figura 4.5
(a) MP es perpendicular al plano que contiene
a P y a F.
(b) La dirección de MP indica la dirección
del momento.
P
Plano que contiene a
ryaF
(a)
(b)
4.2 Vector de momento
F
P
r
F
P
F
r
P
r
(a)
u
r
(b)
(c)
La dirección de MP también indica el sentido del momento: si el pulgar de su
mano derecha apunta hacia MP, el “arco” de sus dedos indica el sentido del giro
que F tiende a generar alrededor de P (figura 4.5b).
El resultado que se obtiene con la ecuación (4.2) no depende de dónde interseca el vector r a la línea de acción de F. En vez del vector r de la figura 4.6a,
podría usarse el vector r de la figura 4.6b. Se tiene el vector r r u, donde u
es paralelo a F (figura 4.6c). Por lo tanto,
r * F = 1r¿ + u2 * F = r¿ * F
porque el producto cruz de los vectores paralelos u y F es igual a cero.
En resumen, el momento de una fuerza F respecto a un punto P tiene tres
propiedades:
1. La magnitud de MP es igual al producto de la magnitud de F y la distancia
perpendicular de P a la línea de acción de F. Si la línea de acción de F pasa
por P, MP 0.
2. MP es perpendicular al plano que contiene a P y a F.
3. La dirección de MP indica el sentido del momento dado por la regla de la
mano derecha (figura 4.5b). Como el producto cruz no es conmutativo, se
debe tener cuidado con la secuencia correcta de los vectores en la ecuación
MP r F.
A continuación se determinará el momento de la fuerza F en la figura 4.7a
respecto al punto P. Como el vector r de la ecuación (4.2) puede ser un vector
de posición de cualquier punto sobre la línea de acción de F, se puede utilizar un
vector de P al punto de aplicación de F (figura 4.7b):
r (12 3)i (6 4)j (5 1)k 9i 2j 6k (pie),
El momento es
i
MP = r * F = 3 9
4
j
2
4
135
k
-6 3 = 38i - 87j + 28k (pie-lb).
1ft-lb2.
7
La magnitud de MP,
ft-lb,
ƒ MP ƒ = 213822 + 1-8722 + 12822 = 99.0 pies-lb,
Figura 4.6
(a) Vector r de P a la línea de acción de F.
(b) Vector r diferente.
(c) r r u.
136
Capítulo 4 Sistemas de fuerzas y momentos
y
y
y
F 4i 4j 7k (lb)
F
F
(12, 6, 5) pies
P
P
(3, 4, 1) pies
(12, 6, 5) pies
r
Plano que
contiene a
PyaF
P
(3, 4, 1) pies
x
z
x
x
z
z
(a)
MP
(b)
(c)
Figura 4.7
(a) Una fuerza F y un punto P.
(b) Vector r de P al punto de aplicación de F.
(c) MP es perpendicular al plano que contiene a P y a F.
La regla de la mano derecha indica la dirección del momento.
es igual al producto de la magnitud de F y la distancia perpendicular D del punto
P a la línea de acción de F. Por lo tanto,
D=
ƒ MP ƒ 99.0 pies-lb
=
= 11.0 pies.
9 lb
ƒFƒ
La dirección de MP indica la orientación del plano que contiene a P y a F, así
como la dirección del momento (figura 4.7c).
Relación con la descripción bidimensional
Si se observa en dirección perpendicular al plano que contiene al punto P y a la
fuerza F, la descripción bidimensional del momento que se usó en la sección 4.1
especifica tanto la magnitud como la dirección de MP. En esta situación, MP es
perpendicular a la página, y la regla de la mano derecha indica si apunta hacia
afuera o hacia adentro de la página.
Por ejemplo, en la figura 4.8a el punto de vista es perpendicular al plano
x–y y la fuerza de 10 N está contenida en el plano x–y. Suponga que se desea
y
y
y
10j (N)
10j (N)
(4, 2, 0) m
(4, 2, 0) m
x
O
O
10j (N)
r
x
(4, 2, 0) m
x
O
(c)
(a)
(b)
Figura 4.8
(a) La fuerza está contenida en el plano x–y.
(b) La dirección antihoraria del momento indica que MO apunta hacia el afuera de la página.
(c) Vector r desde O hasta el punto de aplicación de F.
4.2 Vector de momento
determinar el momento de la fuerza respecto al origen O. La distancia perpendicular de O a la línea de acción de la fuerza es de 4 m. La descripción bidimensional del momento de la fuerza respecto a O establece que su magnitud es (4 m)
(10 N) 40 N-m y su dirección es contraria al sentido del movimiento de las
manecillas del reloj, o
MO = 40 N-m.
Lo que indica que la magnitud del vector MO es de 40 N-m, y por la regla de la
mano derecha (figura 4.8b), éste apunta hacia afuera de la página. Por lo tanto,
MO = 40k 1N-m2.
Es posible confirmar este resultado usando la ecuación (4.2). Si r es el vector de
O al punto de aplicación de la fuerza (figura 4.8c),
MO = r * F = 14i + 2j2 * 10j = 40k 1N-m2.
Como lo ilustra este ejemplo, la descripción bidimensional del momento determina el momento vectorial. El enunciado opuesto también es verdadero. La
magnitud de MO es igual al producto de la magnitud de la fuerza y la distancia
perpendicular de O a la línea de acción de la fuerza, 40 N-m, y la dirección del
vector MO indica que el sentido del momento es en sentido contrario al movimiento de las manecillas del reloj (figura 4.8b).
Teorema de Varignon
Sea F1, F2, . . . , FN un sistema concurrente de fuerzas cuyas líneas de acción se
intersecan en el punto Q. El momento del sistema respecto al punto P es
1rPQ * F12 + 1rPQ * F22 + Á + 1rPQ * FN2
= rPQ * 1F1 + F2 + Á + FN2,
donde rPQ es el vector de P a Q (figura 4.9). Este resultado, conocido como el
teorema de Varignon, se deriva de la propiedad distributiva del producto cruz,
ecuación (2.31), y confirma que el momento de una fuerza respecto a un punto
P es igual a la suma de los momentos de sus componentes respecto a P.
F1
P
F2
rPQ
FN
Q
Figura 4.9
Un sistema de fuerzas concurrentes y un punto P.
137
138
Capítulo 4 Sistemas de fuerzas y momentos
RESULTADOS
Momento
El momento de una fuerza F respecto a un punto P se
define mediante
MP r F,
(4.2)
F
r
P
donde r es un vector de posición desde P hasta
cualquier punto sobre la línea de acción de F.
Magnitud del momento
La magnitud del vector MP es
MP DF,
(4.3)
donde D es la distancia perpendicular desde P
hasta la línea de acción de F.
Dirección del momento
El vector MP es perpendicular al plano que contiene
el punto P y el vector F. Apuntando el dedo pulgar
hacia la derecha en la dirección de MP, los dedos
apuntan en la dirección de la rotación que F tiende a
causar alrededor de P.
Ejemplo activo 4.4
F
MP
r
P
Determinación de un momento ( Relacionado con el problema 4.45)
Determine el momento de la fuerza F de 90 lb que se muestra en la figura respecto al punto A.
y
C (7, 7, 0) pies
A
(0, 6, 5) pies
F
x
B (11, 0, 4) pies
z
Estrategia
Para aplicar la ecuación (4.2), se debe expresar la fuerza F en términos de sus componentes. El vector r es un vector desde el punto A hasta cualquier punto sobre la
línea de acción de F, entonces se puede usar el vector desde el punto A hasta el
punto B.
4.2 Vector de momento
Solución
y
(7, 7, 0) pies
C
A
(0, 6, 5) pies
x
eBC
(11, 0, 4) pies
B
z
rBC (xC xB)i (yC yB)j (zC zB)k
Obtenga un vector unitario que
tenga la misma dirección que la
fuerza F al dividir entre su
magnitud el vector de posición
desde el punto B hasta el punto C.
4i 7j 4k (pies).
eBC rBC
7
4
4
i j k.
rBC
9
9
9
F (90 lb)eBC
4
7
4
(90 lb) i j k
9
9
9
40i 70j 40k (lb).
Exprese la fuerza F en términos de
sus componentes al escribirla
como el producto de su magnitud
y el vector unitario eBC.
y
C (7, 7, 0) pies
A
(0, 6, 5) pies
F
x
rAB
z
B
(11, 0, 4) pies
rAB (xB xA)i (yB yA)j (zB zA)k
11i 6j k (pies).
MA rAB F
i
j
k
11 6 1
40
Aplique la ecuación (4.2) para
determinar el momento de F
respecto al punto A.
70 40
310i 480j 530k (pies-lb).
Problema de práctica a) Use la ecuación (4.2) para determinar el momento de F respecto al punto A, donde r es el vector de posición del punto A al punto C. b) Determine
la distancia perpendicular desde el punto A hasta la línea de acción de F.
Respuesta: a) MA 310i 480j 530k (pie-lb). b) 8.66 pies.
139
140
Capítulo 4 Sistemas de fuerzas y momentos
Aplicación del vector de momento ( Relacionado con el problema 4.57)
Ejemplo 4.5
Los cables AB y AC se extienden del punto de unión A sobre el piso a los puntos
de unión B y C en las paredes. La tensión en el cable AB es de 10 kN y la del cable
AC es de 20 kN. ¿Qué valor tiene la suma de los momentos respecto a O debidos
a las fuerzas ejercidas sobre A por los dos cables?
y
C
(6, 3, 0) m
B
(0, 4, 8) m
O
x
A
(4, 0, 6) m
Solución
Sean FAB y FAC las fuerzas ejercidas por los dos cables sobre el punto A de
conexión (figura a). Para expresar FAB en términos de sus componentes, se
determina el vector de posición de A a B,
z
y
C
(6, 3, 0) m
B
(0, 4, 8) m
O
r
FAB
z
x
FAC
y
y se divide entre su magnitud para obtener un vector unitario eAB con la misma
dirección que FAB (figura b):
(6, 3, 0) m
O
x
A (4, 0, 6) m
z
(b) El vector unitario eAB tiene la misma
dirección que FAB.
- 4i + 4j + 2k 1m2
2
2
1
= - i + j + k.
3
3
3
21- 4 m2 + 14 m2 + 12 m2
2
2
2
Ahora se escribe FAB como
FAB = 10eAB = - 6.67i + 6.67j + 3.33k 1kN2.
Se expresa de la misma manera la fuerza FAC en términos de sus componentes:
C
eAB
10 - 42i + 14 - 02j + 18 - 62k = - 4i + 4j + 2k 1m2,
eAB =
A
(4, 0, 6) m
(a) Las fuerzas FAB y FAC ejercidas en A por
los cables.
B
(0, 4, 8) m
Estrategia
Las fuerzas ejercidas sobre el punto de unión A por los dos cables deben expresarse en términos de sus componentes. Después se puede usar la ecuación (4.2)
para determinar los momentos que ejercen las fuerzas respecto a O.
FAC = 5.71i + 8.57j - 17.14k 1kN2.
Selección del vector r Como las líneas de acción de ambas fuerzas pasan por el
punto A, se puede usar el vector desde O hasta A para determinar los momentos de
ambas fuerzas respecto al punto O (figura a):
r = 4i + 6k 1m2.
Evaluación de r F
La suma de los momentos es
©MO = 1r * FAB2 + 1r * FAC2
= 3
i
4
-6.67
j
0
6.67
k
i
63 + 3 4
3.33
5.71
j
0
8.57
k
63
- 17.14
= - 91.4i + 49.5j + 61.0k 1kN-m2.
Razonamiento crítico
Las líneas de acción de las fuerzas FAB y FAC se intersecan en A. Observe que, de
acuerdo con el teorema de Varignon, se podrían haber sumado primero las fuerzas,
para obtener
FAB + FAC = - 0.952i + 15.24j - 13.81k 1kN2,
141
Problemas
y después haber determinado la suma de los momentos de las dos fuerzas respecto a O calculando el momento de la suma de las dos fuerzas respecto a O.
©MO = r * 1FAB + FAC2
= 3
i
4
-0.952
j
0
15.24
k
63
-13.81
= - 91.4i + 49.5j + 61.0k 1kN-m2.
Problemas
4.45 En el ejemplo activo 4.4, ¿Cuál es el momento de F
respecto al origen de sistema coordenado?
4.48 Use la ecuación (4.2) para determinar el momento de la
fuerza de 100 kN que se muestra en la figura a) respecto a A y
b) respecto a B.
4.46 Use la ecuación (4.2) para determinar el momento de la
fuerza de 80 N respecto al origen O. Considere que r es el vector
a) de O a A; b) de O a B.
y
A
y
80j (N)
100j (kN)
6m
(6, 4, 0) m
B
B
O
x
8m
x
12 m
A (6, 0, 0) m
Problema 4.48
Problema 4.46
4.47 Un ingeniero biomédico que estudia una lesión producida
al lanzar la jabalina estima que la magnitud de la fuerza máxima
ejercida fue de F 360 N y que la distancia perpendicular de
O a la línea de acción de F fue de 550 mm. El vector F y el
punto O están contenidos en el plano x–y. Exprese el momento
de F respecto a la articulación del hombro en O como un vector.
4.49 El cable AB ejerce una fuerza de 200 N sobre el soporte en A
que apunta desde A hacia B. Use la ecuación (4.2) para determinar
el momento de esta fuerza respecto al punto P, a) considere que r
es el vector de P a A y b) considere que r es el vector de P a B.
y
P (0.9, 0.8) m
y
(0.3, 0.5) m
A
F
B
(1, 0.2) m
O
x
x
Problema 4.49
Problema 4.47
142
Capítulo 4 Sistemas de fuerzas y momentos
4.50 La línea de acción de F que se muestra en la figura está
contenida en el plano x–y. El momento de F respecto a O es de
140k (N-m), y el momento de F respecto a A es de 280k (N-m).
¿Cuáles son las componentes de F?
4.53 Las tres fuerzas mostradas se aplican a la placa. Use la
ecuación (4.2) para determinar la suma de los momentos de
las tres fuerzas respecto al punto P.
y
4 kN
y
45
A (0, 7, 0) m
F
3 kN
30
0.18 m
(5, 3, 0) m
P
0.10 m
x
O
20
0.12 m
Problema 4.50
x
12 kN
0.28 m
Problema 4.53
4.51 Use la ecuación (4.2) para determinar la suma de los momentos de las tres fuerzas mostradas, a) respecto a A y (b) respecto a B.
4.54 a) Determine la magnitud del momento de la fuerza de
150 N que se muestra en la figura respecto a A calculando la
distancia perpendicular de A a la línea de acción de la fuerza.
b) Use la ecuación (4.2) para determinar el momento de la fuerza
de 150 N respecto a A.
y
6 kN
3 kN
3 kN
B
A
x
y
0.2 m
0.2 m
0.2 m
0.2 m
(0, 6, 0) m
Problema 4.51
150k (N)
4.52 Las tres fuerzas mostradas se aplican a la placa. Use la
ecuación (4.2) para determinar la suma de los momentos de
las tres fuerzas respecto al origen O.
A
(6, 0, 0) m
y
z
Problema 4.54
200 lb
3 pies
200 lb
3 pies
x
O
6 pies
4 pies
500 lb
Problema 4.52
x
Problemas
4.55 a) Determine la magnitud del momento de la fuerza de 600 N
que se muestra en la figura respecto a A, calculando la distancia
perpendicular desde A hasta la línea de acción de la fuerza.
b) Use la ecuación (4.2) para determinar la magnitud del momento de la fuerza de 600 N respecto a A.
y
143
4.59 Se tiene la fuerza F 30i 20j 10k (N).
a) Determine la magnitud del momento de F respecto a A.
b) Suponga que se puede cambiar la dirección de F manteniendo
su magnitud constante, y se desea elegir una dirección que maximice el momento de F respecto a A. ¿Cuál es la magnitud del
momento máximo resultante?
y
A
F
(0.6, 0.5, 0.4) m
A
(4, 3, 3) m
x
(8, 2, 4) m
x
0.8 m
600i (N)
z
z
Problema 4.59
Problema 4.55
4.56 ¿Cuál es la magnitud del momento de F respecto al punto B?
y
A
(4, 4, 2) pies
F 20i 10j 10k (lb)
4.60 Los cosenos directores de la fuerza F que se muestra en la
figura son cos ux 0.818, cos uy 0.182 y cos uz 0.545. El
soporte de la barra en O fallará si la magnitud del momento de F
respecto a O excede de 100 kN-m. Determine la magnitud de la
máxima fuerza F que puede aplicarse con seguridad a la barra.
y
B (8, 1, 2) pies
x
z
Problema 4.56
z
4.57 En el ejemplo 4.5 suponga que el punto de unión C se
mueve a la ubicación (8, 2, 0) m y la tensión en el cable AC cambia
a 25 kN. ¿Cuál es la suma de los momentos respecto a O debidos a
las fuerzas ejercidas por los dos cables sobre el punto de unión A?
4.58 La cuerda que se muestra en la figura ejerce una fuerza
de magnitud F 200 lb sobre la parte superior del poste en B.
Determine la magnitud del momento de F respecto a A.
y
B (5, 6, 1) pies
F
A
x
C (3, 0, 4) pies
z
Problema 4.58
O
F
3m
Problema 4.60
x
144
Capítulo 4 Sistemas de fuerzas y momentos
4.61 La fuerza F ejercida sobre el mango de un aparato para
hacer ejercicio apunta hacia el vector unitario e = 23 i - 23 j + 13 k,
y su magnitud es de 120 N. Determine la magnitud del momento
de F respecto al origen O.
4.62 La fuerza F que se muestra en la figura apunta hacia el
vector unitario e = 23 i - 23 j + 13 k. El soporte en O resistirá con
seguridad un momento de 560 N-m de magnitud. a) Con base
en este criterio, ¿cuál es la máxima magnitud segura de F? b) Si
la fuerza F puede ejercerse en cualquier dirección, ¿cuál es su
máxima magnitud segura?
4.64 Los pesos de los brazos OA y AB del manipulador
robótico que se muestra en la figura actúan en sus puntos medios.
Los cosenos directores de la línea central del brazo OA son
cos ux 0.500, cos uy 0.866 y cos uz 0, mientras que los del
brazo AB son cos ux 0.707, cos uy 0.619 y cos uz 0.342.
¿Qué valor tiene la suma de los momentos respecto a O debidos
a las dos fuerzas?
m
y
0m
150 mm
y
B
60
160 N
O
600 mm
A
F
200 N
200 mm
z
250 mm
O
x
z
x
Problemas 4.61/4.62
4.63 Un ingeniero civil en Boulder, Colorado, estima que bajo
los vientos Chinook más severos esperados, la fuerza total sobre
la señal de tránsito para carretera que se muestra en la figura, será
de F 2.8i 1.8j (kN). Sea MO es el momento debido a F respecto a la base O de la columna cilíndrica que soporta la señal. La
componente y de MO se llama torsión ejercida sobre la columna
cilíndrica en la base, y la componente de MO paralela al plano x–z
se llama momento flexionante. Determine las magnitudes de la
torsión y el momento flexionante.
Problema 4.64
4.65 La tensión en el cable AB que se muestra en la figura es de
100 lb. Si se desea que la magnitud del momento respecto a la
base O del árbol, debido a las fuerzas ejercidas sobre éste por los
dos cables, sea de 1500 pie-lb, ¿cuál es la tensión necesaria en la
cuerda AC?
y
y
F
8m
(0, 8, 0) pies
A
O
8m
x
x
O
B
z
(0, 0, 10) pies
z
Problema 4.63
Problema 4.65
(14, 0, 14) pies
C
Problemas
4.66* Una fuerza F actúa en el extremo superior A del poste
que se muestra en la figura. Su magnitud es F 6 kN y su
componente x es Fx 4 kN. Se muestran las coordenadas del
punto A. Determine las componentes de F de tal manera que la
magnitud del momento debido a F respecto a la base P del
poste sea la máxima posible.
145
4.69 La torre que se muestra en la figura tiene 70 m de altura.
Las tensiones en los cables AB, AC y AD son de 4 kN, 2 kN y
2 kN respectivamente. Determine la suma de los momentos
respecto al origen O debidos a las fuerzas ejercidas por los
cables en el punto A.
4.70 Suponga que la tensión en el cable AB de la figura es de
4 kN, y que las tensiones en los cables AC y AD se deben ajustar
para que la suma de los momentos respecto al origen O debidos a
las fuerzas ejercidas por los cables en el punto A sea igual a cero.
Determine las tensiones.
y
F
A
(4, 3, 2) m
y
A
P
x
D
35 m
z
B
35 m
40 m
C
40 m
Problema 4.66
x
O
40 m
z
4.67 La fuerza F 5i (kN) actúa sobre el anillo A donde se unen
los cables AB, AC y AD. ¿Cuál es el valor de la suma de los momentos respecto al punto D debidos a la fuerza F y a las tres fuerzas ejercidas por los cables sobre el anillo?
Estrategia: El anillo está en equilibrio. Use su conocimiento
acerca de las cuatro fuerzas que actúan sobre él.
4.68 En el problema 4.67, determine el momento respecto al punto
D debido a la fuerza ejercida sobre el anillo A por el cable AB.
y
Problemas 4.69/4.70
4.71 La tensión en el cable AB es de 150 N, y en el cable AC
es de 100 N. Determine la suma de los momentos respecto a D
debidos a las fuerzas ejercidas sobre la pared por los cables.
4.72 La fuerza ejercida por los dos cables en la dirección perpendicular a la pared es de 2 kN. La magnitud de la suma de
los momentos respecto a D debidos a las fuerzas ejercidas
por los cables sobre la pared es de 18 kN-m. ¿Cuáles son las
tensiones en los cables?
D (0, 6, 0) m
y
A
5m
F
(12, 4, 2) m
C
B
(6, 0, 0) m
5m
B
x
C
(0, 4, 6) m
4m
z
Problemas 4.67/4.68
8m
D
8m
z
A
x
Problemas 4.71/4.72
146
Capítulo 4 Sistemas de fuerzas y momentos
4.73 La tensión en el cable BD es 1 kN. Como resultado, el cable
BD ejerce una fuerza de 1 kN sobre la rótula en B que apunta de B
hacia D. Determine el momento de esta fuerza respecto al punto A.
4.74* Suponga que la masa del objeto E suspendido es de 100 kg
y que la masa de la barra AB es de 20 kg. Considere que el peso
de la barra actúa en su punto medio. Si la suma de los momentos
respecto al punto A debidos al peso de la barra y a las fuerzas
ejercidas por los tres cables BC, BD y BE sobre la rótula en B es
igual a cero, determine las tensiones en los cables BC y BD.
4.76 Para evaluar qué tan bueno es el diseño del poste de
acero vertical que se muestra en la figura, usted debe determinar el momento respecto a la base del poste debido a la fuerza
ejercida sobre el punto B por el cable AB. Una celda de carga
montada sobre el cable AC indica que la tensión en dicho cable
es de 22 kN. ¿Cuál es el valor del momento?
y
5m
5m
y
C
C
D
(0, 4, 3) m
4m
B
(4, 3, 1) m
D
(0, 5, 5) m
8m
(6, 2, 0) m
O
x
A
z
E
B
A
3m
12 m
x
z
Problemas 4.73/4.74
Problema 4.76
4.75 El collarín de 200 kg en A se mantiene en su lugar sobre
la barra vertical lisa por medio del cable AB. Determine el momento respecto a la base de la barra (punto C con coordenadas
x 2 m, y z 0) debido a la fuerza ejercida por el cable
sobre el collarín.
y
2m
B
5m
A
2m
2m
z
Problema 4.75
C
x
4.3 Momento de una fuerza respecto a una línea
147
4.3 Momento de una fuerza respecto a una línea
ANTECEDENTES
El dispositivo de la figura 4.10, llamado cabrestante, se usó en los barcos de vela.
Lo hacían girar empujando las manijas como se muestra en la figura 4.10a para
generar energía en tareas como elevar las anclas e izar las velas. Una fuerza vertical F aplicada a una de las manijas como en la figura 4.10b, no hace girar al
cabrestante, aun cuando la magnitud del momento respecto al punto P sea dF en
ambos casos.
La medida de la tendencia de una fuerza a causar un giro alrededor de una
línea o eje se denomina momento de la fuerza respecto a la línea. Suponga que
una fuerza F actúa sobre un objeto como una turbina que gira alrededor de un eje
L, y que se descompone F en componentes con base en el sistema coordenado de
la figura 4.11. Las componentes Fx y Fz no hacen girar la turbina, así como tampoco la fuerza paralela al eje del cabrestante la hacía girar. Es la componente Fy
la que tiende a causar giros al ejercer un momento de magnitud aFy respecto al
eje de la turbina. En este ejemplo se puede determinar con facilidad el momento
de F respecto a L porque el sistema coordenado está convenientemente situado.
A continuación se introducirá una expresión que sirve para determinar el momento de una fuerza respecto a cualquier línea.
d
d
P
P
F
F
(a)
(b)
Figura 4.10
(a) Giro de un cabrestante.
(b) Una fuerza vertical no hace girar el cabrestante.
y
Fy
F
a
P
L
z
Fz
Fx
x
Figura 4.11
Aplicación de una fuerza a una turbina con eje
de giro L.
148
Capítulo 4 Sistemas de fuerzas y momentos
F
Considere una línea L y una fuerza F (figura 4.12a). Sea MP el momento de F
respecto a un punto arbitrario O sobre L (figura 4.12b). El momento de F respecto
a L es la componente de MP paralela a L, que se denota con ML (figura 4.12c).
La magnitud del momento de F respecto a L es ML , y cuando el pulgar de la
mano derecha apunta en la dirección de ML, el arco de los dedos indica el sentido
del momento respecto a L. En términos de un vector unitario e a lo largo de L
(figura 4.12d), ML está dado por
L
(a)
MP r F
F
P
L
(4.4)
ML = [e # 1r * F2]e.
(b)
(4.5)
El triple producto escalar mixto en esta expresión está dado en términos de las componentes de los tres vectores por
MP
e # 1r
P
ML
MP
P
ex
3
* F2 = rx
Fx
ey
ry
Fy
ez
rz 3 .
Fz
(4.6)
Observe que el valor del escalar e ⴢ MP e ⴢ (r F) determina tanto la magnitud
como la dirección de ML. El valor absoluto de e ⴢ MP es la magnitud de ML. Si
e ⴢ MP es positivo, ML apunta hacia e, y si e ⴢ MP es negativo, ML apunta en la
dirección opuesta a e.
El resultado obtenido con la ecuación (4.4) o la ecuación (4.5) no depende del
punto sobre L elegido para determinar MP r F. Si se usa el punto P de la figura 4.13 para determinar el momento de F respecto a L, se obtiene el resultado
mediante la ecuación (4.5). Y usando el punto P se obtiene el mismo resultado,
(c)
L
ML = 1e # MP2e.
(El vector unitario e puede apuntar en cualquier dirección. Vea el análisis de las
componentes vectoriales en la sección 2.5). El momento MP r F, por lo que
también se puede expresar ML como
r
L
Definición
e
ML
[e # 1r¿ * F2]e = 5e # [1r + u2 * F]6e
(d)
Figura 4.12
(a) La línea L y la fuerza F.
(b) MP es el momento de F respecto a
cualquier punto O sobre L.
(c) La componente ML es el momento de F
respecto a L.
(d) Vector unitario e a lo largo de L.
= [e # 1r * F2 + e # 1u * F2]e
= [e # 1r * F2]e,
porque u F es perpendicular a e.
Aplicaciones
Para demostrar que ML es la medida de la tendencia de F a ocasionar giros alrededor de L, se considerará de nuevo la turbina de la figura 4.11. Sea Q un punto
sobre L a una distancia arbitraria b del origen (figura 4.14a). El vector r de Q a P
es r ai bk, por lo que el momento de F respecto a Q es
P
u
P
L
e
F
r
r
Figura 4.13
Uso de diferentes puntos P y P para determinar
el momento de F respecto a L.
i
MQ = r * F = 3 a
Fx
j
0
Fy
k
-b 3 = bFy i - 1aFz + bFx2j + aFy k.
Fz
Como el eje z coincide con L, el vector unitario k está dirigido a lo largo de L. Por
lo tanto, el momento de F respecto a L es
ML = 1k # MQ2k = aFy k.
4.3 Momento de una fuerza respecto a una línea
y
149
y
Fy
F
a
b
Q
r
L
P
Fx
Fz
x
x
ML a Fy k
z
z
(a)
Figura 4.14
(a) Un punto Q arbitrario sobre L y el vector r
de Q a P.
(b) ML y la dirección del momento respecto
a L.
(b)
Las componentes Fx y Fz no ejercen momento respecto a L. Si se supone que Fy es
positiva, ésta ejerce un momento de magnitud aFy respecto al eje de la turbina en
la dirección mostrada en la figura 4.14b.
Ahora se determinará el momento de una fuerza respecto a una línea arbitraria L (figura 4.15a). El primer paso es elegir un punto sobre la línea. Si se escoge
el punto A (figura 4.15b), el vector r de A al punto de aplicación de F es
r = 18 - 22i + 16 - 02j + 14 - 42k = 6i + 6j 1m2.
El momento de F respecto a A es
i
3
MA = r * F = 6
10
j
k
6
03
60 -20
= - 120i + 120j + 300k 1N-m2.
El siguiente paso es determinar un vector unitario a lo largo de L. El vector de A a
B es
1-7 - 22i + 16 - 02j + 12 - 42k = - 9i + 6j - 2k 1m2.
y
y
F 10i 60j 20k (N)
B (7, 6, 2) m
B (7, 6, 2) m
F
(8, 6, 4) m
(8, 6, 4) m
L
r
L
x
x
A (2, 0, 4) m
A (2, 0, 4) m
z
z
(a)
(b)
y
y
B (7, 6, 2) m
F
F
B
eBA
x
eAB
x
A
A (2, 0, 4) m
z
z
(c)
(d)
Figura 4.15
(a) Una fuerza F y una línea L.
(b) Vector r de A al punto de aplicación de F.
(c) eAB apunta de A a B.
(d) La regla de la mano derecha indica la
dirección del momento.
150
Capítulo 4 Sistemas de fuerzas y momentos
Al dividir este vector entre su magnitud, se obtiene un vector unitario eAB que
apunta desde A hacia B (figura 4.15c):
eAB = -
9
6
2
i +
j k.
11
11
11
El momento de F respecto a L es
ML = 1eAB # MA2eAB
= ca-
9
6
2
b1- 120 N-m2 + a b1120 N-m2 + a - b1300 N-m2 deAB
11
11
11
= 109eAB 1N-m2.
La magnitud de ML es 109 N-m; la dirección se indica apuntando el pulgar de la
mano derecha hacia eAB.
Si se calcula ML usando el vector unitario eBA, que apunta desde B hacia A, se
obtiene
ML = - 109eBA 1N-m2.
Se obtiene la misma magnitud, y el signo menos indica que ML apunta en la dirección opuesta a eBA, por lo que la dirección de ML es la misma. Por consiguiente, la
regla de la mano derecha indica la misma dirección (figura 4.15d).
En los ejemplos precedentes se demostraron tres resultados útiles que pueden
establecerse en términos más generales:
• Cuando la línea de acción de F es perpendicular a un plano que contenga a L
(figura 4.16a), la magnitud del momento de F respecto a L es igual al producto de la magnitud de F y la distancia D perpendicular desde L hasta el punto
donde la línea de acción interseca al plano: ML FD.
• Cuando la línea de acción de F es paralela a L (figura 4.16b), el momento de
F respecto a L es igual a cero: ML 0. Como MP r F es perpendicular
a F, MP es perpendicular a L y la componente vectorial de MP paralela a L es
igual a cero.
• Cuando la línea de acción de F interseca a L (figura 4.16c), el momento de F
respecto a L es igual a cero. Como es posible elegir cualquier punto sobre L
para evaluar MP, se puede usar el punto donde la línea de acción de F interseca a L. El momento MP respecto a ese punto es igual a cero, por lo que su
componente vectorial paralela a L también es cero.
F
P
r
P
F
L
D
(a)
Figura 4.16
(a) F es perpendicular a un plano que contiene a L.
(b) F es paralela a L.
(c) La línea de acción de F interseca a L en P.
F
L
(b)
L
(c)
4.3 Momento de una fuerza respecto a una línea
RESULTADOS
Determinación del momento de una fuerza F respecto a
una línea L
MP r F
F
Elija cualquier punto P sobre la
línea y determine el momento
MP de F respecto a P.
P
r
L
La componente de MP paralela a L,
denotada por ML, es el momento de F
respecto a la línea. (Si se apunta el pulgar
de la mano derecha en la dirección de ML,
los otros dedos apuntarán en la dirección
del momento respecto a la línea).
MP
P
L
ML
Si e es un vector unitario paralelo a L,
ML (eⴢMP) e.
(4.4)
Casos especiales
Cuando la línea de acción de F es perpendicular al
plano que contiene a L, ML FD, donde D es la
distancia perpendicular desde L hasta el punto en que la
línea de acción interseca al plano.
F
L
D
Cuando la línea de acción de F es
paralela a L, ML 0.
F
L
Cuando la línea de acción de F
interseca a L, ML 0.
P
F
L
151
152
Capítulo 4 Sistemas de fuerzas y momentos
Ejemplo activo 4.6
Momento de una fuerza respecto a una línea ( Relacionado con el problema 4.87)
¿Cuál es el valor del momento de la fuerza F respecto al eje de la barra BC?
y
C
(0, 4, 0) m
F 2i 6j 3k (kN)
A (4, 2, 2) m
x
B
z
(0, 0, 3) m
Estrategia
Como se conocen las coordenadas de los puntos A, B y C, es posible determinar el
momento debido a F respecto a un punto sobre el eje de la barra. Se determinará
el momento respecto al punto B. La componente de ese momento paralelo al eje
BC es el momento de F respecto al eje. Mediante la obtención de un vector unitario paralelo al eje, se puede usar la ecuación (4.4) para determinar la componente
paralela.
Solución
y
C
F
r
A
x
z
r (xA xB)i (yA yB)j (zA zB)k
4i 2j k (m).
B
Determinación de las componentes
del vector desde el punto B hasta
el punto de aplicación de F.
MB r F
i
j
k
4
2
1
2
6
3
12i 10j 28k (kN-m).
Cálculo del momento de F
respecto al punto B.
4.3 Momento de una fuerza respecto a una línea
rBC (xC xB)i (yC yB)j (zC zB)k
4j 3k (m).
r
eBC BC 0.8j 0.6k.
rBC
La obtención de un vector unitario
paralelo al eje BC se logra dividiendo el vector de posición del punto
B al punto C entre su magnitud.
y
C
eBC
x
z
MBC (eBCⴢMB) eBC
[(0)(12) (0.8)(10) (0.6)(28)]eBC
24.8eBC (kN-m).
B
Aplicación de la ecuación (4.4) para
determinar el momento de F respecto
al eje BC. Observe el resultado
negativo. Si se apunta el pulgar de la
mano derecha en la dirección opuesta
a la del vector unitario eBC, los otros
dedos apuntan en la dirección del
momento de F respecto al eje BC.
y
C
F
A
eBC
x
B
z
Problema de práctica Determine el momento MC de la fuerza F respecto al punto C.
Úselo para calcular el momento de F respecto al eje BC determinando la componente de
MC paralela al eje.
Respuesta: MBC 24.8eBC (kN-m).
153
154
Capítulo 4 Sistemas de fuerzas y momentos
Momento de una fuerza respecto al eje x (䉴 Relacionado con el problema 4.77 )
Ejemplo 4.7
¿Qué valor tiene el momento de la fuerza de 50 lb respecto al eje x?
y
Estrategia
El momento puede determinarse en dos formas:
50j (lb)
O
Primer método Se pueden usar las ecuaciones (4.5) y (4.6). Como r se puede
extender desde cualquier punto sobre el eje x a la línea de acción de la fuerza,
puede usarse el vector de O al punto de aplicación de la fuerza. El vector e debe
ser un vector unitario a lo largo del eje x; entonces es posible utilizar i o ⫺i.
x
(4, 0, 3) pies
z
Segundo método Este ejemplo es el primer caso especial que se estudió, pues la
fuerza de 50 lb es perpendicular al plano x–z. La magnitud y la dirección del
momento se pueden determinar directamente de la información dada.
Solución
Primer método Determinar un vector r. El vector de O al punto de aplicación
de la fuerza es (figura a)
y
r ⫽ 4i ⫹ 3k (pie).
50j (lb)
O
Determinar un vector e. Se puede utilizar el vector unitario i.
Evaluar ML. De acuerdo con la ecuación (4.6), el triple producto escalar es
x
r
(4, 0, 3) pies
z
i # 1r
(a) Vector r de O al punto de
aplicación de la fuerza.
1
3
* F2 = 4
0
0
0
50
0
3 3 = ⫺150
- 150 pies-lb.
ft-lb.
0
De la ecuación (4.5), el momento de la fuerza respecto al eje x es
y
M eje x ⫽ [i ⴢ (r ⫻ F)]i ⫽ ⫺150i (pies-lb).
La magnitud del momento es de 150 pies-lb y su dirección es como se muestra en
la figura b.
Segundo método Como la fuerza de 50 lb es perpendicular a un plano (el plano
x–z) que contiene al eje x, la magnitud del momento respecto al eje x es igual a la
distancia perpendicular del eje x al punto en que la línea de acción de la fuerza
interseca al plano x–z (figura c):
x
⫺150i (pies-lb)
z
(b) Dirección del momento.
兩Meje x 兩 ⫽ (3 pies)(50 lb) ⫽ 150 pies-lb.
Apuntando con el arco de los dedos en la dirección del momento respecto al eje x
(figura c), la regla de la mano derecha indica que Meje x apunta en la dirección
negativa del eje x. Por lo tanto,
y
50j (lb)
M eje x ⫽ ⫺150i (pies-lb).
x
3 pies
z
(c) La distancia del eje x al punto donde la
línea de acción de la fuerza interseca al
plano x–z es igual a 3 pies. La flecha
indica la dirección del momento
respecto al eje x.
Razonamiento crítico
La puerta con bisagras de este ejemplo está diseñada para girar respecto al eje x.
Si no actúan otras fuerzas sobre la puerta, puede verse que la fuerza ascendente
de 50 lb tendería a causar que la puerta girase hacia arriba. Es el momento de la
fuerza respecto al eje x, y no el momento de la fuerza respecto a algún punto, el
que mide la tendencia de la fuerza a ocasionar que la puerta gire sobre sus bisagras. Aún más, la dirección del momento de la fuerza respecto al eje x indica la
dirección en la que la fuerza tiende a causar que la puerta gire (vea la figura b).
4.3 Momento de una fuerza respecto a una línea
Ejemplo 4.8
155
Máquinas giratorias ( Relacionado con el problema 4.100)
El tripulante que se muestra en la figura ejerce las fuerzas indicadas sobre las manijas de un cabrestante, donde F 4j 32k N. Determine el momento total que
ejerce a) respecto al punto O y b) respecto al eje del cabrestante, el cual coincide
con el eje x.
y
(0.18, 0.28, 0.1) m
F
O
z
x
ⴚF
(0.18, 0.28, 0.1) m
y
Estrategia
a) Para obtener el momento total respecto al punto O, se deben sumar los momentos de las dos fuerzas respecto a O. Denote la suma mediante MO.
b) Como el punto O está sobre el eje x, el momento total respecto al eje x es la componente de MO paralela al eje x, que es la componente x de MO.
O
Solución
a) El momento total respecto al punto O es
i
©MO = 3 -0.18
0
j
0.28
4
k
i
0.1 3 + 3 0.18
32
0
= 17.1i + 11.5j - 1.4k 1N-m2.
Eje ©M
x
z
j
-0.28
-4
k
- 0.1 3
- 32
b) El momento total respecto al eje x es la componente x de MO (figura a):
Meje x 17.1 (N-m).
Observe que éste es el resultado dado por la ecuación (4.4): Como i es un vector
unitario paralelo al eje x,
Meje x (i ⴢ MO)i 17.1 (N-m).
©MO
(a) Momento total respecto al eje x.
x
156
Capítulo 4 Sistemas de fuerzas y momentos
Problemas
4.77 La fuerza F 20i 40j 10k (N). Use los dos procedimientos descritos en el ejemplo 4.7 para determinar el momento
debido a F respecto al eje z.
y
4.81 La persona de la figura ejerce una fuerza
F 0.2i 0.4j 1.2k (lb) sobre la puerta en el punto C.
El punto C pertenece al plano x–y. ¿Qué momento ejerce
la fuerza respecto al eje AB de las bisagras, que coincide
con el eje y?
y
A
F
C
x
(8, 0, 0) m
3.5 pies
z
B
Problema 4.77
x
2 pies
Problema 4.81
4.78 Use las ecuaciones (4.5) y (4.6) para determinar el momento de la fuerza de 20 N mostrada respecto a a) al eje x, b) al eje y
y c) al eje z. (Primero determine si puede escribir los resultados
sin usar las ecuaciones.)
4.82 Cuatro fuerzas actúan sobre la placa mostrada en la figura.
Sus componentes son
FA = - 2i + 4j + 2k 1kN2,
y
FB = 3j - 3k 1kN2,
FC = 2j + 3k 1kN2,
(7, 4, 0) m
FD = 2i + 6j + 4k 1kN2.
20k (N)
x
Determine la suma de los momentos de las fuerzas a) respecto al
eje x y b) respecto al eje z.
y
z
Problema 4.78
FB
4.79 Tres fuerzas paralelas al eje y de la figura actúan sobre la
placa rectangular. Use las ecuaciones (4.5) y (4.6) para determinar
la suma de los momentos de las fuerzas respecto al eje x. (Primero
determine si puede escribir los resultados sin usar las ecuaciones).
4.80 Las tres fuerzas de la figura son paralelas al eje y. Determine la suma de los momentos de las fuerzas a) respecto al eje y
y b) respecto al eje z.
x
FD
z
FC
3m
Problema 4.82
y
3 kN
x
2 kN
z
FA
6 kN
900 mm
Problemas 4.79/4.80
600 mm
2m
Problemas
4.83 Se tiene una fuerza F 30i 20j 10k (lb).
a) ¿Qué valor tiene el momento de F respecto al eje y de la figura?
b) Suponga que la magnitud de F se mantiene fija, pero cambia su
dirección de manera que el momento de F respecto al eje y sea lo
más grande posible. ¿Cuál es la magnitud del momento resultante?
4.84 El momento de la fuerza F respecto al eje x de la figura es
80i (pie-lb), el momento respecto al eje y es igual a cero, y el
momento respecto al eje z es 160k (pie-lb). Si Fy 80 lb, ¿cuáles
son los valores de Fx y Fz?
157
4.87 En el ejemplo activo 4.6, suponga que la fuerza cambia a
F 2i 3j 6k (kN). Determine la magnitud del momento de
la fuerza respecto al eje de la barra BC.
4.88 Determine el momento de la fuerza de 20 N mostrada respecto a la línea AB. Use las ecuaciones (4.5) y (4.6) y considere que el
vector unitario e apunta a) desde A hacia B y b) desde B hacia A.
y
A (0, 5, 0) m
y
(7, 4, 0) m
20k (N)
B
(4, 0, 0) m
x
F
z
(4, 2, 2) pies
Problema 4.88
x
z
Problemas 4.83/4.84
4.85 El manipulador robótico que se muestra en la figura es
estacionario. Los pesos de los brazos AB y BC actúan en sus
puntos medios. Los cosenos directores de la línea central del
brazo AB son cos ux 0.500, cos uy 0.866 y cos uz 0,
mientras que los del brazo BC son cos ux 0.707, cos uy 0.619
y cos uz 0.342. ¿Qué valor tiene el momento total respecto
al eje z debido a los pesos de los brazos?
4.89 Se tiene la fuerza F 10i 5j 5k (kip). Determine el
momento de F respecto a la línea AB mostrada. Trace un bosquejo
para indicar la dirección del momento.
y
B
(6, 6, 0) pies
F
4.86 En el problema 4.85, ¿cuál es el valor del momento total
respecto al eje x debido al peso de los brazos?
A
x
(6, 0, 0) pies
m
y
0m
B
600 mm
C
60
z
Problema 4.89
160 N
4.90 Se tiene la fuerza F 10i 12j 6k (N). ¿Cuál es el
momento de F respecto a la línea AO de la figura? Trace un
bosquejo para indicar la dirección del momento.
y
200 N
(0, 6, 4) m
A
A
F
O
z
x
x
z
Problemas 4.85/4.86
(8, 0, 6) m
Problema 4.90
158
Capítulo 4 Sistemas de fuerzas y momentos
4.91 La tensión en el cable AB mostrado es de 1 kN. Determine
el momento respecto al eje x debido a la fuerza ejercida sobre la
compuerta por el cable en el punto B. Trace un bosquejo para
indicar la dirección del momento.
4.94 Las coordenadas de A son (– 2.4, 0, – 0.6) m y las de B
son (2.2, 0.7, 1.2) m. La fuerza ejercida en B por la escota
principal AB del bote de vela es de 130 N. Determine el momento de la fuerza respecto a la línea central del mástil (el eje y).
Trace un bosquejo para indicar la dirección del momento.
y
y
A
(400, 300, 0) mm
x
600 mm
B
1000 mm
z
x
Problema 4.91
B
4.92 Determine el momento de la fuerza aplicada en D respecto
a la línea recta que pasa a través de las bisagras A y B de la figura.
(La línea que pasa por A y B pertenece al plano y–z).
A
z
4.93 La tensión en el cable CE que se muestra en la figura es
de 160 lb. Determine el momento de la fuerza ejercida por el
cable sobre la cubierta en C respecto a la línea recta que pasa
por las bisagras A y B.
4.95 La tensión en el cable AB mostrado es de 200 lb. Determine
los momentos respecto a cada uno de los ejes coordenados debidos a la fuerza ejercida en B por el cable. Trace bosquejos para
indicar las direcciones de los momentos.
y
6 pies
E
20i 60j (lb)
A
D
B
20
y
A (2, 5, 2) pies
x
4 pies
2 pies
z
Problema 4.94
x
C
4 pies
Problemas 4.92/4.93
z
B (10, 2, 3) pies
Problema 4.95
Problemas
4.96 La fuerza total ejercida por la manguera de vapor sobre
las hojas de la turbina es F 20i 120j 100k (N), y actúa
efectivamente en el punto (100, 80, 300) mm. ¿Qué momento
se ejerce respecto al eje de la turbina (el eje x)?
159
4.98 La tensión en el cable AB mostrado es de 80 lb. ¿Cuál es
el momento respecto a la línea CD debido a la fuerza ejercida
por el cable sobre la pared en B?
y
y
Fijo
Giratorio
8 pies
3 pies
B
C
6 pies
x
x
D
z
Problema 4.96
4.97 El soporte neumático AB sostiene la tapa de un portaequipaje en su lugar. Ejerce una fuerza de 35 N sobre el montaje
en B que apunta en la dirección desde A hacia B. Determine la
magnitud del momento de la fuerza respecto al eje de la bisagra
de la tapa, que es el eje z.
A (6, 0, 10) pies
z
Problema 4.98
4.99 La magnitud de la fuerza F es de 0.2 N y sus cosenos
directores son cos ux 0.727, cos uy 0.364 y cos uz 0.582.
Determine la magnitud del momento de F respecto al eje AB de
la bobina.
y
B
(200, 400, 0) mm
(160, 475, 290) mm
P
A
F
(100, 500, 400) mm
y
x
B (60, 100, 30) mm
z
Problema 4.99
O
z
x
Problema 4.97
A
(480, 40, 40) mm
160
Capítulo 4 Sistemas de fuerzas y momentos
4.100 Un conductor aplica las dos fuerzas mostradas
para aflojar una tuerca. Los cosenos directores de F son
4
3
cos ux = 13
, cos uy = 12
13 , y cos uz = 13 . Si la magnitud del
momento respecto al eje x debe ser de 32 pie-lb para que
se afloje la tuerca, ¿cuál es la magnitud de las fuerzas que se
deben aplicar? (Vea el ejemplo 4.8).
4.102 El eje de una rueda de un automóvil pasa a través del
sistema coordenado que se muestra en la figura y sus cosenos
directores son cos ux 0.940, cos uy 0, cos uz 0.342. La
fuerza ejercida sobre la llanta por el camino actúa de manera
efectiva en el punto x 0, y 0.36 m, z 0 y tiene componentes F 720i 3660j 1240k (N). ¿Cuál es el momento
de F respecto al eje de la rueda?
y
ⴚF
F
z
y
16
pulg
x
16
pulg
x
Problema 4.100
4.101 La tensión en el cable AB mostrada es de 2 kN. ¿Cuál es
la magnitud del momento respecto al eje CD debido a la fuerza
ejercida por el cable en A? Trace un bosquejo para indicar el
sentido del momento respecto al eje.
2m
C
A
z
Problema 4.102
4.103 Los cosenos directores de la línea central OA son cos
ux 0.500, cos uy 0.866 y cos uz 0, y los de la línea AG
son cos ux 0.707, cos uy 0.619 y cos uz 0.342. ¿Cuál
es el momento respecto a OA debido al peso de 250 N? Trace
un bosquejo para indicar el sentido del momento respecto al eje.
2m
m
D
B
G
m
50
y
7
1m
250 N
3m
Problema 4.101
600 mm
A
O
z
x
Problema 4.103
161
Problemas
4.104 El radio del volante mide 200 mm. La distancia de O a C
es de 1 m. El centro C del volante se encuentra en el plano x–y.
El conductor ejerce una fuerza F 10i 10j 5k (N) sobre
el volante en A. Si el ángulo a 0, ¿cuál es la magnitud del
momento respecto al eje OC? Dibuje un bosquejo para indicar la
dirección del momento respecto al eje.
4.106 En la figura, el peso W causa una tensión de 100 lb en
el cable CD. Si d 2 pies, ¿cuál es el momento respecto al eje z
debido a la fuerza ejercida por el cable CD en el punto C?
y
(12, 10, 0) pies
y
(0, 3, 0) pies
W
F
C
D
C
A
20
O
d
a
z
x
z
(3, 0, 10) pies
Problema 4.106
x
Problema 4.104
4.105* La magnitud de la fuerza F es 10 N. Suponga que desea
elegir la dirección de la fuerza F de manera que la magnitud de su
momento respecto a la línea L sea máxima. Determine las componentes de F y la magnitud de su momento respecto a L. (Existen
dos soluciones para F).
4.107* El eje y apunta hacia arriba. El peso de la placa rectangular de 4 kg que se muestra en la figura actúa en el punto medio G
de la placa. La suma de los momentos respecto a la línea recta que
pasa por los soportes A y B debidos al peso de la placa y la fuerza
ejercida sobre la placa por el cable CD es igual a cero. ¿Cuál es la
tensión en el cable?
y
y
A
(100, 500, 700) mm
A (3, 8, 0) m
(100, 250, 0) mm
D
L
F
G
B
(0, 2, 6) m
x
B
P
(12, 4, 4) m
(0, 180, 360) mm
x
C
z
Problema 4.105
(200, 55, 390) mm
z
Problema 4.107
162
Capítulo 4 Sistemas de fuerzas y momentos
4.4 Pares
ANTECEDENTES
Ahora que se ha descrito cómo calcular el momento debido a una fuerza, considere esta pregunta: ¿es posible ejercer un momento sobre un cuerpo sin someterlo a
una fuerza neta? La respuesta es sí, y sucede siempre que se toca un disco compacto, se pone en marcha el rotor de un motor eléctrico o se aprieta un tornillo con
un desarmador. Sobre esos cuerpos se ejercen fuerzas, pero en una forma tal que
la fuerza neta es nula mientras que el momento neto no lo es.
Dos fuerzas que tienen igual magnitud, direcciones opuestas y líneas de
acción diferentes se denominan par (figura 4.17a). Un par tiende a generar rotaciones aún cuando la suma vectorial de las fuerzas sea nula, y tiene la notable propiedad de que el momento que ejerce es el mismo respecto a cualquier punto.
El momento de un par es simplemente la suma de los momentos de las fuerzas
respecto a un punto P (figura 4.17b):
M = [r1 * F] + [r2 * 1- F2] = 1r1 - r22 * F.
El vector r1 r2 es igual al vector r mostrado en la figura 4.17c, por lo que es
posible expresar el momento como
M = r * F.
Como r no depende de la posición de P, el momento M es el mismo para cualquier punto P.
Debido a que un par ejerce un momento pero la suma de las fuerzas es nula,
se suele representar en los diagramas simplemente el momento (figura 4.17d).
Como el gato Cheshire en Alicia en el país de las maravillas, que desaparece
excepto su sonrisa, las fuerzas no aparecen; sólo se ve el momento que ejercen.
Sin embargo, se reconoce el origen del momento al hacer referencia a él como
momento de un par o simplemente par.
F
ⴚF
F
F
r1
r1
ⴚF
r2
P
(a)
r
ⴚF
r2
P
(b)
(c)
F
F
M
D
M
ⴚF
ⴚF
(d)
(e)
Figura 4.17
(a) Un par.
(b) Determinación del momento respecto a P.
(c) Vector r r1 r2.
(d) Representación del momento del par.
(e) La distancia D entre las líneas de acción.
(f) M es perpendicular al plano que contiene F y F.
(f)
4.4 Pares
y
163
y
y
(3, 7, 0) m
(3, 7, 0) m
2j (kN)
2j (kN)
2j (kN)
8 kN-m
2j (kN)
r2
(7, 2, 0) m
(7, 2, 0) m
x
r1
x
x
O
(a)
(b)
(c)
Figura 4.18
(a) Par consistente en fuerzas de 2 kN.
(b) Determinación de la suma de los momentos de las fuerzas respecto a O.
(c) Representación de un par en dos dimensiones.
Observe en la figura 4.17c que M r F es el momento de F respecto a
un punto sobre la línea de acción de la fuerza F. La magnitud del momento de
una fuerza respecto a un punto es igual al producto de la magnitud de la fuerza
y la distancia perpendicular del punto a la línea de acción de la fuerza, es decir,
M DF , donde D es la distancia perpendicular entre las líneas de acción de
las dos fuerzas (figura 4.17e). El producto cruz r F es perpendicular a r y a
F, lo cual significa que M es perpendicular al plano que contiene a F y a F
(figura. 4.17f). Si el pulgar de la mano derecha apunta hacia M, los arcos de los
otros dedos indican el sentido del momento.
En la figura 4.18a, el punto de vista es perpendicular al plano que contiene las
dos fuerzas. La distancia entre las líneas de acción de las fuerzas es de 4 m, por lo
que la magnitud del momento del par es M (4 m)(2 kN) 8 kN-m. El momento M es perpendicular al plano que contiene las dos fuerzas. Con el arco de los dedos
de la mano derecha indicando el sentido contrario al movimiento de las manecillas del reloj, se encuentra que la regla de la mano derecha señala que M apunta
hacia afuera de la página. Por lo tanto, el momento del par es
M = 8k 1kN-m2.
También es posible determinar el momento del par calculando la suma de los
momentos de las dos fuerzas respecto a cualquier punto. La suma de los momentos de las fuerzas respecto al origen O es (figura 4.18b)
M = [r1 * 12j2] + [r2 * 1-2j2]
= [17i + 2j2 * 12j2] + [13i + 7j2 * 1- 2j2]
(a)
= 8k 1kN-m2.
En una situación bidimensional como la de este ejemplo, no es conveniente
representar un par mostrando el vector de momento, puesto que el vector es perpendicular a la página. En vez de esto, se representa el par mostrando su magnitud y una flecha circular que indica su sentido (figura 4.18c).
Si se sujeta una barra y se tuerce (figura 4.19a), se ejercerá un momento respecto a su eje (figura 4.19b). Aunque el sistema de fuerzas sobre la barra está distribuido de manera complicada sobre la superficie, el efecto es el mismo que si se
ejercieran dos fuerzas iguales y opuestas (figura 4.19c). Al representar un par
como en la figura 4.19b, o mostrar el vector de momento M, se implica que algún
sistema de fuerzas ejerce ese momento. El sistema de fuerzas (como las que se
ejercen al torcer la barra, o las fuerzas sobre un cigüeñal que ejerce un momento
F
M
F
(b)
(c)
Figura 4.19
(a) Torcimiento de una barra.
(b) El momento respecto al eje de la barra.
(c) Se obtiene el mismo efecto aplicando dos
fuerzas iguales y opuestas.
164
Capítulo 4 Sistemas de fuerzas y momentos
sobre el eje de transmisión de un automóvil) casi siempre es más complicado que
dos fuerzas iguales y opuestas, aunque el efecto es el mismo. Por ello, es posible
modelar el sistema real como un sistema simple de dos fuerzas.
RESULTADOS
F
Dos fuerzas con magnitudes iguales,
direcciones opuestas y líneas de
acción diferentes se llama un par.
ⴚF
El momento respecto a un punto debido a
un par es la suma de los momentos de sus
dos fuerzas respecto a ese punto. El
momento M debido a un par es el mismo
respecto a cualquier punto. Su magnitud es
DF, donde D es la distancia perpendicular
entre las líneas de acción de las fuerzas. El
vector M es perpendicular al plano que
contiene las líneas de acción.
F
D
ⴚF
Debido a que la fuerza total ejercida por un par es igual a cero,
a menudo un par se representa mediante el momento que ejerce.
M
y
Cuando las líneas de acción de las fuerzas de
un par se encuentran en el plano x–y, el par
puede representarse mediante su magnitud y
una flecha circular que indica su dirección.
M
x
Ejemplo activo 4.9
Momento de un par ( Relacionado con el problema 4.108)
La fuerza F 10i 4j (N). Determine el momento debido al par y represéntelo
mediante su magnitud y una flecha circular que indique su dirección.
y
ⴚF
(6, 6, 0) m
(8, 3, 0) m
F
x
Estrategia
Se usarán dos métodos para determinar el momento. En el primer método, se elegirá un punto y se calculará la suma de los momentos de las fuerzas respecto a ese
punto. Como el momento debido a un par es el mismo respecto a cualquier punto,
se puede elegir cualquier punto conveniente. En el segundo método, se sumarán
los momentos de los dos pares formados por las componentes x e y de las fuerzas.
4.4 Pares
Solución
Primer método
y
(6, 6, 0) m
ⴚF
r
(8, 3, 0) m
F
x
M r (F)
(2i 3j) (10i 4j)
22k (N-m).
Cálculo de la suma de los momentos
de las dos fuerzas respecto al punto de
aplicación de la fuerza F.
y
La magnitud del momento es 22 N-m. Si se
apunta el pulgar de la mano derecha en la
dirección del vector unitario k, se deduce
que la dirección del momento en el plano
x–y es en sentido contrario al movimiento
de las manecillas del reloj.
22 N-m
x
Segundo método
y
Las componentes de las
dos fuerzas forman dos
pares.
y
10 N
4N
(6, 6, 0) m
(6, 6, 0) m
ⴙ
(8, 3, 0) m
(8, 3, 0) m
10 N
4N
x
La magnitud del momento debido al par de 10 N es
(3 m)(10 N) 30 N-m, y su sentido es en sentido
contrario al movimiento de las manecillas del reloj.
La magnitud del momento debido al par de 4 N es
(2 m)(4 N) 8 N-m, y su sentido en dirección del
movimiento de las manecillas del reloj. Por lo tanto,
el momento en sentido contrario al movimiento de las
manecillas del reloj total es 30 8 22 N-m.
Problema de práctica Use el producto cruz para calcular la suma de los momentos
F y F respecto al punto P con coordenadas (10, 7, 3) m. Represente el momento mediante su magnitud y una flecha circular que indique su dirección.
Respuesta: 22k (N-m), o 22 N-m en sentido contrario al movimiento de las manecillas del reloj.
x
165
166
Capítulo 4 Sistemas de fuerzas y momentos
Ejemplo 4.10
Determinación de fuerzas desconocidas ( Relacionado con el problema 4.113)
Dos fuerzas, A y B, y un par de 200 pies-lb actúan sobre la viga mostrada. La suma
de las fuerzas es igual a cero, y los momentos respecto al extremo izquierdo de la
viga también suman cero. ¿Qué valor tienen las fuerzas A y B?
y
200 pies-lb
A
B
4 pies
4 pies
x
Estrategia
Al sumar las dos fuerzas (el par no ejerce fuerza neta sobre la viga) y al sumar los
momentos debidos a las fuerzas y el par respecto al extremo izquierdo de la viga,
se obtendrán dos ecuaciones en términos de las fuerzas desconocidas.
Solución
La suma de las fuerzas es
Fy A B 0.
El momento del par (200 pies-lb, en sentido del movimiento de las manecillas del
reloj) es el mismo respecto a cualquier punto, por lo que la suma de los momentos respecto al extremo izquierdo es
Mextremo izquierdo (4 pies) B 200 pies-lb 0.
Las fuerzas son B 50 lb y A 50 lb.
y
200 pies-lb
50 lb
50 lb
4 pies
4 pies
x
Las fuerzas sobre la viga forman un par.
Razonamiento crítico
Observe que el momento total respecto al extremo izquierdo de la viga es la suma
del momento debido a la fuerza B y el momento debido al par de 200 pies-lb. Como
se observará en el capítulo 5, si un objeto sometido a fuerzas y pares está en equilibrio, la suma de las fuerzas es igual a cero y la suma de los momentos respecto
a cualquier punto, incluyendo los momentos debidos a pares, también es igual a
cero. En este ejemplo se necesitaron ambas condiciones para determinar las fuerzas desconocidas A y B.
4.4 Pares
167
Suma de los momentos debidos a dos pares ( Relacionado con el problema 4.119)
Ejemplo 4.11
Determine la suma de los momentos ejercidos por los dos pares sobre el tubo que
se muestra en la figura.
y
20 N
30 N
30 N
2m
4m
4m
x
60
60
20 N
z
Estrategia
Se expresará el momento ejercido por cada par como un vector. Para expresar el par
de 30 N en términos de un vector, se expresarán las fuerzas en términos de sus componentes. Después se pueden sumar los vectores de momento para determinar la
suma de los momentos ejercidos por los pares.
Solución
Considere el par de 20 N. La magnitud del momento del par es (2 m)(20 N) 40
N-m. La dirección del vector de momento es perpendicular al plano y–z, y la regla
de la mano derecha indica que el vector apunta en la dirección positiva del eje x. El
momento del par de las fuerzas de 20 N es 40i (N-m).
Descomponiendo las fuerzas de 30 N en sus componentes y y z, se obtienen
los dos pares mostrados en la figura a. El momento del par formado por las componentes y es (30 sen 60°)(4)k (N-m), y el momento del par formado por las
componentes z es (30 cos 60°)(4)j (N-m).
Por lo tanto, la suma de los momentos es
M 40i (30 cos 60°)(4)j (30 sen 60°)(4)k (N-m)
40i 60j 104k (N-m).
y
30 sen 60 N
30 sen 60 N
4m
x
30 cos 60 N
30 cos 60 N
z
Razonamiento crítico
Aunque el método usado en este ejemplo ayuda a reconocer las contribuciones de
los pares individuales en la suma de los momentos, sólo es conveniente cuando las
orientaciones de las fuerzas y sus puntos de aplicación relativos al sistema coordenado son suficientemente simples. Cuando no es éste el caso, la suma de los
momentos se puede determinar escogiendo cualquier punto y calculando la suma
de los momentos de las fuerzas respecto a ese punto.
(a) Descomposición de las fuerzas de 30 N en
componentes y y z.
168
Capítulo 4 Sistemas de fuerzas y momentos
Problemas
4.108 En el ejemplo activo 4.9, suponga que el punto de aplicación de la fuerza F se mueve de (8, 3, 0) m a (8, 8, 0) m. Trace
un bosquejo que muestre la nueva posición de la fuerza. Con base
en su bosquejo, ¿el momento debido al par será en dirección del
movimiento de las manecillas del reloj o en sentido contrario?
Calcule el momento debido al par. Represente el momento mediante su magnitud y una flecha circular que indique la dirección.
4.112 Se aplican tres fuerzas de igual magnitud paralelas a los
lados de un triángulo equilátero. a) Demuestre que la suma de
los momentos de las fuerzas es el mismo respecto a cualquier
punto. b) Determine la magnitud de la suma de los momentos.
4.109 Las fuerzas están contenidas en el plano x–y.
a) Determine el momento del par mostrado en la figura y represéntelo como en la figura 4.18c.
b) ¿Qué valor tiene la suma de los momentos de las dos fuerzas
respecto al punto (10, 40, 20) pies?
F
L
F
F
y
Problema 4.112
1000 lb
1000 lb
60
4.113 En el ejemplo 4.10, suponga que el par de 200 pies-lb
es en sentido contrario al movimiento de las manecillas del reloj.
Trace un bosquejo de la viga que muestre las fuerzas y el par que
actúan sobre ésta. ¿Cuál es el valor de las fuerzas A y B?
60
x
20 pies
20 pies
4.114 En la figura se muestran los momentos de dos pares.
¿Cuál es el valor de la suma de los momentos respecto al punto P?
Problema 4.109
4.110 El momento del par es 600k (N-m). ¿Cuál es el valor del
ángulo a?
y
50 pies-lb
y
a
P
(0, 4) m
100 N
x
(4, 0, 0) pies
100 N
10 pies-lb
a
x
(5, 0) m
Problema 4.114
Problema 4.110
4.111 El punto P está contenido en el plano x–y, F 100 N, y
el momento del par es 500k (N-m). ¿Cuáles son las coordenadas
de P?
y
4.115 Determine la suma de los momentos ejercidos por los dos
pares sobre la placa que se muestra en la figura.
y
30 lb
P
30
3 pies
F
30 lb
ⴚF
2 pies
70
x
x
20 lb
20 lb
5 pies
Problema 4.111
4 pies
Problema 4.115
Problemas
4.116 Determine la suma de los momentos ejercidos respecto a
A por el par y las dos fuerzas.
100 lb
400 lb
169
4.120 a) En la figura, ¿cuál es el momento del par?
b) Determine la distancia perpendicular entre las líneas de acción
de las dos fuerzas.
900 pies-lb
y
A
B
(0, 4, 0) m
3 pies
4 pies
3 pies
4 pies
Problema 4.116
2i 2j k (kN)
2i 2j k (kN)
x
4.117 Determine la suma de los momentos ejercidos respecto a
A por el par y las dos fuerzas.
100 N
(0, 0, 5) m
30
z
Problema 4.120
200 N
0.2 m
A
300 N-m
0.2 m
0.2 m
0.2 m
4.121 Determine la suma de los momentos ejercidos por los tres
pares sobre la placa que se muestra. (Las fuerzas de 80 lb están
contenidas en el plano x–z).
y
Problema 4.117
3 pies
20 lb
4.118 La suma de los momentos respecto al punto A debidos a
las fuerzas y pares que actúan sobre la barra es igual a cero.
a) ¿Cuál es la magnitud del par C?
b) Determine la suma de los momentos respecto al punto B
debidos a las fuerzas y pares que actúan sobre la barra.
3 pies
20 lb
40 lb
x
8 pies
40 lb
B
60
z
4 kN
60
80 lb
80 lb
Problema 4.121
3m
20 kN-m
4.122 ¿Cuál es la magnitud de la suma de los momentos ejercidos por los dos pares sobre el dispositivo en forma de T que
se muestra en la figura?
C
A
4 kN
2 kN
5 kN
5m
3 kN
y
3m
3 pies
3 pies
50i 20j 10k (lb)
50j (lb)
Problema 4.118
3 pies
4.119 En el ejemplo 4.11, suponga que en vez de actuar en
la dirección positiva del eje z, la fuerza superior de 20 N actúa
en la dirección positiva del eje x. En lugar de actuar en la dirección negativa del eje z, considere que la fuerza inferior de 20 N
actúa en la dirección negativa del eje x. Trace un bosquejo del
tubo donde se muestren las fuerzas que actúan sobre él. Determine la suma de los momentos ejercidos por los dos pares sobre
el tubo.
z
50j (lb)
3 pies
50i 20j 10k (lb)
Problema 4.122
x
170
Capítulo 4 Sistemas de fuerzas y momentos
4.123 La tensión en los cables AB y CD es de 500 N.
a) Demuestre que las dos fuerzas ejercidas por los cables sobre la
compuerta rectangular en B y en C forman un par.
b) ¿Cuál es el momento ejercido por los cables sobre la placa?
y
A
4.125 La barra que se muestra está cargada por las fuerzas
FB = 2i + 6j + 3k 1kN2,
FC = i - 2j + 2k 1kN2,
y el par
MC = 2i + j - 2k 1kN-m2.
Determine la suma de los momentos de las dos fuerzas y el par
respecto a A.
(0, 2, 0) m
4.126 Se tienen las fuerzas
FB = 2i + 6j + 3k 1kN2,
FC = i - 2j + 2k 1kN2,
3m
B
z
x
3m
y el par
MC = MCy j + MC z k 1kN-m2.
C
Determine los valores de MCy y MCz tales que la suma de los momentos de las dos fuerzas y el par respecto a A sea igual a cero.
y
D
(6, –2, 3) m
FB
Problema 4.123
MC
A
4.124 Los cables AB y CD ejercen un par sobre el tubo vertical.
La tensión en cada cable es 8 kN. Determine la magnitud del
momento que ejercen los cables sobre el tubo.
(1.6, 2.2, 1.2) m
B
1m
z
C
x
1m
FC
Problemas 4.125/4.126
y
4.127 Se usan dos llaves para apretar un codo hidráulico. La
fuerza F 10k (lb) se aplica en (6, 5, 3)pulg sobre la llave
de la derecha, y la fuerza F se aplica en (4, 5, 3) pulg sobre
la llave de la izquierda.
a) Determine el momento respecto al eje x de la fuerza ejercida
sobre la llave derecha.
b) Determine el momento del par formado por las fuerzas que se
ejercen sobre las dos llaves.
c) Con base en esos resultados, explique por qué se usan dos llaves.
D
C
(0.2, 1.6, 0.2) m
y
A
(0.2, 0.6, 0.2) m
x
z
B
z
x
(1.6, 0, 1.2) m
Problema 4.124
F
ⴚF
Problema 4.127
4.5 Sistemas equivalentes
171
4.5 Sistemas equivalentes
ANTECEDENTES
Un sistema de fuerzas y momentos es simplemente un conjunto particular de fuerzas y momentos de pares. Los sistemas de fuerzas y momentos que se estudian en
ingeniería pueden ser complicados. En especial, esto es cierto cuando se tienen
fuerzas distribuidas, como las fuerzas de presión ejercidas por el agua sobre una
presa. Pero si sólo interesan la fuerza total y el momento total ejercidos, un sistema complicado de fuerzas y momentos se puede representar mediante un sistema
mucho más sencillo.
Condiciones de equivalencia
Se definen los dos sistemas, 1 y 2, como equivalentes si las sumas de las fuerzas
son iguales, o
1©F21 = 1©F22,
(4.7)
y si las sumas de los momentos respecto a un punto P son también iguales, o
1©MP21 = 1©MP22.
(4.8)
Para ver qué significan las condiciones de equivalencia, considere los sistemas
de fuerzas y momentos de la figura 4.20a. En el sistema 1, un cuerpo está sometido a las fuerzas FA y FB y a un par MC. En el sistema 2, el objeto está sometido a
la fuerza FD, y a dos pares ME y MF. La primera condición para la equivalencia es
1©F21 = 1©F22:
FA + FB = FD.
(4.9)
Sistema 2
Sistema 1
ME
FB
MC
FD
FA
MF
(a)
Sistema 2
Sistema 1
ME
FB
MC
FD
rD
rB
FA
rA
P
P
(b)
MF
Figura 4.20
(a) Diferentes sistemas de fuerzas y momentos
aplicados a un objeto.
(b) Determinación de la suma de los momentos
respecto a un punto P en cada sistema.
172
Capítulo 4 Sistemas de fuerzas y momentos
Si se determinan las sumas de los momentos respecto al punto P de la figura 4.20b,
la segunda condición para la equivalencia es
1©MP21 = 1©MP22:
1rA * FA2 + 1rB * FB2 + MC = 1rD * FD2 + ME + MF.
Sistema 1
Si estas condiciones se satisfacen, los sistemas 1 y 2 son equivalentes.
Se usará este ejemplo para demostrar que si las sumas de las fuerzas son iguales para dos sistemas de fuerzas y momentos y las sumas de los momentos respecto
a un punto P son iguales, entonces las sumas de los momentos respecto a cualquier
punto son iguales. Suponga que se satisface la ecuación (4.9) y que la ecuación
(4.10) se satisface para el punto P en la figura 4.20b. Para un punto diferente P
(figura 4.21), se demostrará que
FB
MC
rB
rA
FA
1©MP¿21 = 1©MP¿22 :
P
P
(4.10)
œ
1rAœ * FA2 + 1rBœ * FB2 + MC = 1rD
* FD2 + ME + MF.
r
Sistema 2
(4.11)
En términos del vector r de P a P, las relaciones entre los vectores rA, rB y rD de
la figura 4.21 y los vectores rA, rB y rD de la figura 4.20b son
ME
rAœ = r + rA,
rBœ = r + rB,
œ
rD
= r + rD.
Sustituyendo estas expresiones en la ecuación (4.11), se obtiene
FD
[1r + rA2 * FA] + [1r + rB2 * FB] + MC
rD
= [1r + rD2 * FD] + ME + MF.
MF
P
P
r
Reordenando los términos, esta ecuación puede escribirse como
Figura 4.21
Determinación de la suma de los momentos
respecto a un punto diferente P.
M1
F2
M2
MK
FN
que se cumple en vista de las ecuaciones (4.9) y (4.10). Las sumas de los momentos
de los dos sistemas respecto a cualquier punto son iguales.
Representación de sistemas mediante sistemas
equivalentes
Sistema 1
F1
[r * 1©F21] + 1©MP21 = [r * 1©F22] + 1©MP22,
P
Sistema 2
M
Si sólo interesan la fuerza y el momento totales ejercidos sobre un cuerpo por un
sistema dado de fuerzas y momentos, este sistema se puede representar con uno
equivalente. Esto significa que en vez de mostrar las fuerzas y los momentos
reales que actúan sobre un cuerpo, se puede mostrar un sistema diferente que
ejerza la misma fuerza y el mismo momento totales. De esta manera, un sistema
dado se reemplazaría por otro menos complicado para simplificar el análisis de las
fuerzas y momentos que actúan sobre el cuerpo, así como para comprender mejor
sus efectos sobre el objeto.
Representación de un sistema mediante una fuerza y un par Considere
un sistema arbitrario de fuerzas y momentos y un punto P (sistema 1 de la figura
4.22). Este sistema se puede representar con otro sistema que consista en una sola
fuerza actuando en P y un solo par (sistema 2). Las condiciones de equivalencia son
1©F22 = 1©F21:
F = 1©F21
F
P
Figura 4.22
(a) Un sistema arbitrario de fuerzas y
momentos.
(b) Una fuerza que actúa en P y un par.
y
1©MP22 = 1©MP21:
M = 1©MP21.
4.5 Sistemas equivalentes
Estas condiciones se satisfacen si F es igual a la suma de las fuerzas del sistema 1
y M es igual a la suma de los momentos respecto a P en el sistema 1.
Por consiguiente, no importa la complejidad de un sistema de fuerzas y
momentos, siempre se podrá representar con una sola fuerza actuando en cierto
punto y un solo par.
Sistema 1
Sistema 2
FP
F
P
P
Representación de una fuerza mediante una fuerza y un par Una fuerza
FP que actúa en un punto P (sistema 1 en la figura 4.23a), puede representarse por
medio de una fuerza F actuando en un punto Q diferente y un par M (sistema 2). El
momento del sistema 1 respecto al punto Q es r FP, donde r es el vector de Q a
P (figura 4.23b). Las condiciones de equivalencia son
M
Q
Q
(a)
Sistema 1
1©F22 = 1©F21:
FP
F = FP
y
P
1©MQ22 = 1©MQ21:
r
Q
M = r * FP.
(b)
Los sistemas son equivalentes si la fuerza F es igual a la fuerza FP y el par M es
igual al momento de FP respecto a Q.
Fuerzas concurrentes representadas por una fuerza Un sistema de fuerzas
concurrentes cuyas líneas de acción se corten en un punto P (sistema 1 en la figura
4.24) se puede representar con una sola fuerza cuya línea de acción interseque a P
(sistema 2). Las dos sumas de las fuerzas en los dos sistemas son iguales si
Figura 4.23
(a) El sistema 1 es una fuerza FP que actúa
en el punto P. El sistema 2 consiste en
una fuerza F que actúa en el punto Q y
un par M.
(b) Determinación del momento del sistema 1
respecto al punto Q.
F = F1 + F2 + Á + FN.
La suma de los momentos respecto a P es igual a cero en cada sistema, por lo tanto
los sistemas son equivalentes si la fuerza F es igual a la suma de las fuerzas en el
sistema 1.
Fuerzas paralelas representadas por una fuerza Un sistema de fuerzas
paralelas cuya suma no sea cero puede representarse mediante una sola fuerza F
(figura 4.25). En el ejemplo 4.14 se demostrará este resultado.
Representación de un sistema mediante una llave de
torsión
Se demostró que cualquier sistema de fuerzas y momentos se puede representar
con una fuerza actuando en un punto y un par. Lo anterior hace surgir una pregunta interesante: ¿Cuál es el sistema más simple equivalente a cualquier sistema de
fuerzas y momentos?
Sistema 1
F1
173
Sistema 2
F3
F
F2
Figura 4.25
Un sistema de fuerzas paralelas y un sistema que consiste en una sola fuerza F.
Sistema 1
FN
F2
Sistema 2
F
F1
P
P
Figura 4.24
Un sistema de fuerzas concurrentes y un
sistema que consiste en una sola fuerza F.
174
Capítulo 4 Sistemas de fuerzas y momentos
Sistema 1
F
F
F
M
Q
P
Q
P
(a)
r
P
(b)
(c)
Sistema 2
Sistema 1
y
F Fj
y
F Fj
My j
My j
M
Q
D
P
Mx i
x
P
x
z
z
(d)
(e)
Figura 4.26
(a) El sistema 1 es una sola fuerza y un solo par.
(b) ¿Puede representarse el sistema 1 con una sola fuerza y ningún par?
(c) El momento de F respecto a P es r F.
(d) F actúa a lo largo del eje y y M está contenido en el plano x–y.
(e) El sistema 2 es la fuerza F y la componente de M paralela a F.
Para considerar esta pregunta, se comenzará con una fuerza arbitraria F que
actúa en un punto P y un par arbitrario M (sistema 1 en la figura 4.26a) y se verá
si es posible representar este sistema con otro más simple. Por ejemplo, ¿podría
representarse con la fuerza F actuando en un punto Q diferente y ningún par (figura 4.26b)? La suma de las fuerzas es igual que en el sistema 1. Si se elige un punto
Q tal que r F M, donde r es el vector de P a Q (figura 4.26c), la suma de los
momentos respecto a P será igual que en el sistema 1 y los sistemas serán equivalentes. Pero el vector r F es perpendicular a F, por lo que puede ser igual a M
sólo si M es perpendicular a F. Esto significa que, en general, no es posible representar el sistema 1 sólo con la fuerza F.
Sin embargo, el sistema 1 puede representarse por medio de la fuerza F
actuando en un punto Q y la componente de M que es paralela a F. En la figura 4.26d se muestra el sistema 1 con un sistema de coordenadas ubicado de
modo que F está sobre el eje y y M está contenido en el plano x–y. En términos
de este sistema coordenado, es posible expresar la fuerza y el par como F Fj
y M Mx i My j. El sistema 2 de la figura 4.26e consiste en la fuerza F
actuando en un punto sobre el eje z y la componente de M paralela a F. Si se
elige la distancia D tal que D MxF, el sistema 2 es equivalente al sistema 1.
La suma de las fuerzas en cada sistema es F. La suma de los momentos respecto
a P en el sistema 1 es M, mientras que en el sistema 2 es
1©MP22 = [1- Dk2 * 1Fj2] + My j = Mx i + My j = M.
Una fuerza F y un par Mp paralelo a F se denominan llave de torsión. Es el
sistema más simple que puede ser equivalente a un sistema arbitrario de fuerzas
y momentos.
4.5 Sistemas equivalentes
F
175
F
Mp
M
M
P
P
Mn
(a)
(b)
F
F
Mp
Mp
P
P
Q
(c)
rPQ
Q
(d)
¿Cómo se puede representar un sistema dado de fuerzas y momentos por
medio de una llave de torsión? Si el sistema consta de una sola fuerza o un solo
par, o si consta de una fuerza F y un par que es paralelo a F, se tendrá una llave de
torsión y no podrá simplificarse más. Si el sistema es más complicado que una sola
fuerza y un solo par, se comienza escogiendo un punto P conveniente y representando el sistema mediante una fuerza F actuando en P y un par M (figura 4.27a).
Luego, la representación de este sistema mediante una llave de torsión requiere de
dos pasos:
1. Se determinan las componentes paralela y normal a F de M (figura 4.27b).
2. La llave de torsión consiste en la fuerza F actuando en un punto Q y la componente paralela MP (figura 4.27c). Para lograr la equivalencia, se debe
escoger el punto Q de manera que el momento de F respecto a P sea igual
a la componente normal Mn (figura 4.27d); es decir, tal que rPQ F Mn.
RESULTADOS
Sistemas equivalentes de fuerzas y momentos
Un sistema de fuerzas y momentos es simplemente un conjunto particular
de fuerzas y momentos debidos a pares. Se define que dos sistemas de
fuerzas y momentos, designados como sistema 1 y sistema 2, son
equivalentes si se satisfacen dos condiciones:
1. La suma de las fuerzas en el sistema 1 es igual a la suma de las
fuerzas en el sistema 2.
2. La suma de los momentos respecto a cualquier punto P debidos a
las fuerzas y a los momentos en el sistema 1 es igual a la suma
de los momentos respecto al mismo punto P debidos a las fuerzas
y momentos en el sistema 2.
Figura 4.27
(a) Si es necesario, represente primero el
sistema con una sola fuerza y un solo par.
(b) Componentes de M paralela y normal a F.
(c) Llave de torsión.
(d) Escoja Q tal que el momento de F
respecto a P sea igual a la componente
normal de M.
176
Capítulo 4 Sistemas de fuerzas y momentos
Representación de sistemas de fuerzas y momentos
mediante sistemas equivalentes
Sistema 1
F1
M1
F2
Representación de un sistema arbitrario
mediante una fuerza y un par
Cualquier sistema de fuerzas y momentos (sistema 1) puede
representarse mediante un sistema equivalente, el cual consiste
en una fuerza F que actúa en cualquier punto P y un par M
(sistema 2). Los sistemas son equivalentes si F es igual a la
suma de las fuerzas en el sistema 1 y M es igual a la suma de
los momentos respecto a P debidos a las fuerzas y momentos
en el sistema 1.
M2
MK
FN
P
Sistema 2
M
F
P
Sistema 1
Representación de una fuerza
mediante una fuerza y un par
Una fuerza F que actúa en un punto P (sistema 1) puede
representarse mediante un sistema equivalente que consiste en la fuerza F que actúa en un punto diferente Q y un
par M (sistema 2). Los sistemas son equivalentes si M es
igual al momento respecto al punto Q debido al sistema 1.
F
P
P
M
Q
Representación de fuerzas concurrentes
mediante una fuerza
Un sistema de fuerzas concurrentes cuyas líneas de
acción se intersecan en un punto P (sistema 1) puede
representarse mediante un sistema equivalente que
consiste en una fuerza F cuya línea de acción pasa a
través de P (sistema 2). Los sistemas son equivalentes
si F es igual a la suma de las fuerzas en el sistema 1.
Representación de fuerzas paralelas
mediante una fuerza
Un sistema de fuerzas paralelas cuya suma no
es cero (sistema 1) puede representarse mediante un sistema equivalente que consiste de
una fuerza F que actúa en un punto (sistema 2).
Los sistemas son equivalentes si F es igual a la
suma de las fuerzas en el sistema 1 y la suma
de los momentos respecto a cualquier punto debidos a las fuerzas en el sistema 1 es igual a
la suma de los momentos respecto al mismo
punto debido a las fuerzas en el sistema 2.
Sistema 2
F
Q
Sistema 1
Sistema 2
FN
F2
F
F1
P
P
Sistema 1
F1
Sistema 2
F
F3
F2
P
4.5 Sistemas equivalentes
( Relacionado con el problema 4.151)
Ejemplo activo 4.12
El sistema 1 consiste en las siguientes fuerzas y pares:
FA = - 10i + 10j - 15k 1kN2,
FB = 30i + 5j + 10k 1kN2,
MC = - 90i + 150j + 60k 1kN-m2.
Suponga que se desea representar el sistema 1 mediante un sistema equivalente, el
cual consiste en una fuerza F que actúa en el punto P con coordenadas (4, 3, 2) m
y un par M (sistema 2). Determine F y M
Sistema 2
y
Sistema 1
y
F
M
(4, 3, 2) m
P
P
(4, 3, 2) m
FB
FA
x
x
(6, 0, 0) m
z
z
MC
Estrategia
Las condiciones para la equivalencia se satisfacen si F es igual a la suma de las
fuerzas en el sistema 1 y M es igual a la suma de los momentos respecto al punto
P debidos a las fuerzas y momentos en el sistema 1. Estas condiciones pueden
usarse para determinar F y M.
Solución
F FA FB
20i 15j 5k (kN).
i
j
M 4
3
10
k
La fuerza F debe ser igual a la
suma de las fuerzas en el sistema 1.
i
j
k
2 2
3
2
5
10
10 15
30
(90i 150j 60k)
El par M debe ser igual a la suma de
los momentos respecto al punto P
debidos a las fuerzas y momentos
en el sistema 1.
105i 110j 90k (kN-m).
Problema de práctica Suponga que se desea representar el sistema 2 mediante un
sistema equivalente, el cual consiste en una fuerza F que actúa en el origen del sistema
de coordenadas y un par M (sistema 3). Determine F y M.
Respuesta: F 20i 15j 5k (kN), M 90i 90j 90k (kN-m).
177
178
Capítulo 4 Sistemas de fuerzas y momentos
Ejemplo 4.13
Representación de un sistema mediante un sistema equivalente más simple
( Relacionado con el problema 4.137)
Sistema 1
El sistema 1 de la figura consiste en dos fuerzas y un par que actúan sobre un tubo.
Represente el sistema 1 mediante a) una sola fuerza que actúe en el origen O del
sistema coordenado y un solo par, y b) una sola fuerza.
y
30j (kN)
20i 20j (kN)
x
O
3m
2m
210 kN-m
Estrategia
a) El sistema 1 puede representarse por medio de una fuerza F que actúe en el
origen y un par M (sistema 2 de la figura a), y utilizar las condiciones de equivalencia para determinar F y M. b) Suponga que la fuerza F se coloca con su
punto de aplicación a una distancia D del origen a lo largo del eje x (sistema 3
de la figura b). Las sumas de las fuerzas en los sistemas 2 y 3 son iguales. Si es
posible escoger la distancia D de manera que el momento respecto a O en el sistema 3 sea igual a M, el sistema 3 será equivalente al sistema 2 y, por lo tanto,
equivalente al sistema 1.
Sistema 3
Sistema 2
y
y
F
F
M
x
O
x
O
D
(a) Una fuerza F que actúa en O y un
par M.
(b) Un sistema consistente en la fuerza F
que actúa en un punto del eje x.
Solución
a) Las condiciones de equivalencia son
1©F22 = 1©F21:
F = 30j + 120i + 20j2 1kN2 = 20i + 50j 1kN2,
y
1©MO22 = 1©MO21:
M = 130 kN213 m2 + 120 kN215 m2 + 210 kN-m
= 400 kN-m.
b) Las sumas de las fuerzas de los sistemas 2 y 3 son iguales. Igualando las sumas
de los momentos respecto a O, se obtiene
1©MO23 = 1©MO22:
150 kN2D = 400 kN-m,
y se encuentra que el sistema 3 equivale al sistema 2 si D 8 m.
Razonamiento crítico
En el inciso b), ¿por qué se supuso que el punto de aplicación de la fuerza está
sobre el eje x? Para representar el sistema en la figura a mediante una sola fuerza,
es necesario colocar la línea de acción de la fuerza de manera que ésta ejerza
un momento en sentido contrario al movimiento de las manecillas del reloj de
400 kN-m respecto a O. La colocación del punto de aplicación de la fuerza a
una distancia D a lo largo del eje x fue sólo una manera conveniente de lograr esto.
4.5 Sistemas equivalentes
Ejemplo 4.14
179
Representación de fuerzas paralelas mediante una sola fuerza ( Relacionado con el
problema 4.154)
El sistema 1 que se muestra en la figura consiste en fuerzas paralelas. Suponga que
se desea representar este sistema mediante una fuerza F (sistema 2). ¿Qué valor
tiene F y dónde interseca su línea de acción al plano x–z?
Estrategia
Es posible determinar F a partir de la condición de que las sumas de las fuerzas en
los dos sistemas deben ser iguales. Para que los dos sistemas sean equivalentes es
necesario escoger el punto de aplicación P de manera que las sumas de los momentos respecto a un punto sean iguales. Esta condición indicará dónde interseca la
línea de acción al plano x–z.
Solución
Las sumas de las fuerzas deben ser iguales
Sistema 1
y
20j (lb)
x
(6, 0, 2) pies
(2, 0, 4) pies
O
z
1©F22 = 1©F21:
F = 30j + 20j - 10j 1lb2 = 40j 1lb2.
30j (lb)
(3, 0, –2) pies
10j (lb)
Sistema 2
y
Las sumas de los momentos respecto a un punto arbitrario deben ser iguales: Sean
(x, y, z) las coordenadas del punto P. Las sumas de los momentos respecto al origen O deben ser iguales.
1©MO22 = 1©MO21:
i
3x
0
j
y
40
k
i
z3 = 36
0
0
j
0
30
F
k
i
23 + 32
0
0
j
0
-10
k
i
4 3 + 3 -3
0
0
j
0
20
k
-2 3
0
Desarrollando los determinantes, se obtiene
[20 pies-lb (40 lb)z]i [100 pies-lb (40 lb)x]k 0.
Las sumas de los momentos respecto al origen son iguales si
x 2.5 pies,
z 0.5 pies.
Estos sistemas son equivalentes si F 40j (lb) y su línea de acción interseca al plano x–z en x 2.5 pies y z 0.5 pies. Observe que no se obtuvo una
ecuación para la coordenada y de P. Los sistemas son equivalentes si F se aplica en
cualquier punto a lo largo de su línea de acción.
Razonamiento crítico
En este ejemplo, se podría haber determinado de una manera más sencilla las coordenadas x y z del punto P. Como las sumas de los momentos respecto a cualquier
punto deben ser iguales para que los sistemas sean equivalentes, las sumas de los
momentos respecto a cualquier línea también deben ser iguales. Igualando las
sumas de los momentos respecto al eje x, se obtiene
(Meje x)2 (Meje x)1:
(40 lb)z (30 lb)(2 pies) (10 lb)(4 pies) (20 lb)(2 pies),
y entonces z 0.5 pie. Asimismo, igualando las sumas de los momentos respecto al eje z, resulta
(Meje z)2 (Meje z)1:
(40 lb)x (30 lb)(6 pies) (10 lb)(2 pies) (20 lb)(3 pies),
y se obtiene x 2.5 pies.
x
O
P
z
180
Capítulo 4 Sistemas de fuerzas y momentos
Ejemplo 4.15
Representación de una fuerza y un par mediante una llave de torsión
( Relacionado con los problemas 4.170, 4.171)
El sistema que se muestra en la figura consiste en la fuerza y el par
y
F = 3i + 6j + 2k 1N2,
M = 12i + 4j + 6k 1N-m2.
F
Represéntelo mediante una llave de torsión, y determine el punto en que la línea
de acción de la fuerza de la llave interseca al plano x–z.
M
O
x
z
Estrategia
La llave es la fuerza F y la componente de M paralela a F (figuras a, b). Se debe
elegir el punto de aplicación P de modo que el momento de F respecto a O sea
igual a la componente normal Mn. Si P es un punto arbitrario del plano x–z, es
posible determinar dónde interseca la línea de acción de F a ese plano.
Solución
Al dividir F entre su magnitud, se obtiene un vector unitario e con la misma dirección que F:
y
F
e =
Mp
M
O
x
Mn
z
F
=
ƒFƒ
3i + 6j + 2k 1N2
213 N22 + 16 N22 + 12 N22
= 0.429i + 0.857j + 0.286k.
Se puede usar e para calcular la componente de M paralela a F:
Mp = 1e # M2e = [10.4292112 N-m2+10.857214 N-m2+ 10.286216 N-m2]e
= 4.408i + 8.816j + 2.939k 1N-m2.
La componente de M normal a F es
Mn = M - Mp = 7.592i - 4.816j + 3.061k 1N-m2.
(a) Descomposición de M en sus
componentes paralela y normal a F.
La llave se muestra en la figura b. Sean (x, 0, z) las coordenadas de P. El momento
de F respecto a O es
y
rOP
F
Mp
i
3
* F = x
3
j
0
6
k
z 3 = - 6zi - 12x - 3z2j + 6xk 1N-m2.
2
Al igualar este momento a Mn, o bien
O
x
P (x, 0, z)
z
(b) Llave de torsión que actúa en un
punto del plano x–z.
-6zi - 12x - 3z2j + 6xk 1N-m2 = 7.592i - 4.816j + 3.061k 1N-m2,
se obtienen las ecuaciones
-6z = 7.592,
-2x + 3z = - 4.816,
6x = 3.061.
Resolviendo estas ecuaciones se encuentran que las coordenadas del punto P son
x 0.510 m, z 1.265 m.
Razonamiento crítico
¿Por qué se colocó el punto P en un punto arbitrario (x, 0, z) en el plano x–z? El
objetivo era colocar la línea de acción de la fuerza F de la llave de torsión de manera que cumpliera con la condición de que el momento de F respecto a O fuese igual
a Mn. Al colocar el punto de aplicación de F en ese punto (x, 0, z) y luego usar esta
condición para determinar x y z, se tuvo una forma conveniente de determinar la
ubicación necesaria de la línea de acción. El punto (x, 0, z) (0.510, 0, 1.265)
m es la intersección de la línea de acción con el plano x–z.
Problemas
181
Problemas
4.128 Dos sistemas de fuerzas actúan sobre la viga mostrada en
la figura. ¿Estos sistemas son equivalentes?
Estrategia: Verifique las dos condiciones para la equivalencia.
Tanto las sumas de las fuerzas como las sumas de los momentos
respecto a un punto arbitrario deben ser iguales.
4.130 Cuatro sistemas de fuerzas y momentos actúan sobre una
viga de 8 m de longitud. ¿Cuáles sistemas son equivalentes?
4.131 Los cuatro sistemas mostrados en la figura pueden hacerse
equivalentes agregando un solo par a uno de los sistemas. ¿De qué
sistema se trata y qué par se debe añadir?
Sistema 1
Sistema 1
y
Sistema 2
10 kN
10 kN
100 N
80 kN-m
8m
8m
Sistema 3
Sistema 4
x
50 N
1m
1m
20 kN
20 kN
10 kN
Sistema 2
y
50 N
80 kN-m
8m
x
4m
10 kN
4m
2m
Problemas 4.130/4.131
Problema 4.128
4.129 Dos sistemas de fuerzas y momentos actúan sobre la viga
mostrada en la figura. ¿Estos sistemas son equivalentes?
Sistema 1
4.132 El sistema 1 es una fuerza F que actúa en un punto O. El
sistema 2 es la fuerza F actuando en un punto O diferente a lo
largo de la misma línea de acción. Explique por qué esos sistemas
son equivalentes. (Este resultado sencillo se denomina, principio
de transmisibilidad).
y
Sistema 1
20 lb
50 pies-lb
Sistema 2
10 lb
F
x
2 pies
F
2 pies
O
Sistema 2
O
y
O
Problema 4.132
20 lb
30 pies-lb
10 lb
x
2 pies
2 pies
Problema 4.129
182
Capítulo 4 Sistemas de fuerzas y momentos
4.133 La suma vectorial de las fuerzas ejercidas por los cables
sobre el tronco que se muestra en la figura es la misma en los dos
casos. Demuestre que los sistemas de fuerzas ejercidos sobre el
tronco son equivalentes.
4.136 Dos sistemas equivalentes de fuerzas y momentos actúan
sobre la placa mostrada. Determine la fuerza F y el par M.
Sistema 1
30 lb
A
Sistema 2
30 lb
10 lb
5 pulg
5 pulg
12 m
100
pulg-lb
8 pulg
8 pulg
30 lb
M
B
50 lb
F
16 m
Problema 4.136
C
12 m
E
D
6m
20 m
Problema 4.133
4.134 Cada uno de los sistemas 1 y 2 mostrados consiste en un
par. Si éstos son equivalentes, ¿qué valor tiene F?
Sistema 1
y
4.138 Tres fuerzas y un par se aplican a una viga (sistema 1).
a) Si el sistema 1 se representa mediante una fuerza aplicada en A
y un par (sistema 2), ¿qué valores tienen F y M?
b) Si el sistema 1 se representa por medio de la fuerza F (sistema 3),
¿qué valor tiene la distancia D?
Sistema 1
Sistema 2
y
y
200 N
F
30
200 N
30
30 lb
40 lb
20 lb
20
5m
4.137 En el ejemplo 4.13, suponga que la fuerza vertical de
30 kN en el sistema 1 debe remplazarse por una fuerza vertical
de 230 kN. Trace un bosquejo del nuevo sistema 1. Si el sistema
1 se representa mediante una sola fuerza F como en el sistema 3,
¿en qué nueva posición D sobre el eje x debe colocarse la fuerza?
30 pies-lb
x
A
(5, 4, 0) m
2m
x
20
4m
2 pies
x
F
2 pies
Sistema 2
y
Problema 4.134
F
M
4.135 Dos sistemas equivalentes de fuerzas y momentos actúan
sobre la barra en forma de L que se muestra en la figura. Determine
las fuerzas FA y FB y el par M.
x
A
Sistema 3
Sistema 1
120 N-m
60 N
3m
FA
y
Sistema 2
F
FB
x
A
40 N
M
50 N
3m
D
Problema 4.138
3m
3m
Problema 4.135
6m
Problemas
4.139 Represente, mediante una fuerza F, las dos fuerzas y el
par que actúan sobre la viga mostrada. Determine F y el punto en
el cual su línea de acción interseca el eje x.
y
60i 60j (N)
280 N-m
x
40j (N)
3m
3m
183
4.142 La suma vectorial de las fuerzas que actúan sobre la armadura mostrada y la suma de los momentos respecto al origen O
son iguales a cero.
a) Determine Ax, Ay y B.
b) Si las fuerzas de 2 kip, 4 kip y 6 kip se representan mediante
una fuerza F, ¿qué valor tiene F y dónde interseca su línea de
acción al eje y?
c) Si las fuerzas de 2 kip, 4 kip y 6 kip se reemplazan con la
fuerza determinada en b), ¿qué valor tienen la suma vectorial de
las fuerzas y la suma de los momentos respecto a O?
2 kip
Problema 4.139
y
3 pies
4.140 La ménsula que se muestra en la figura está sometida a
tres fuerzas y un par. Si este sistema se representa mediante una
fuerza F, ¿cuál es el valor de F y dónde interseca su línea de
acción al eje x?
4 kip
3 pies
6 kip
y
3 pies
Ax
O
x
400 N
Ay
180 N
0.4 m
B
6 pies
140 N-m
200 N
Problema 4.142
0.2 m
x
0.65 m
4.143 La fuerza distribuida que ejerce el suelo sobre una parte de
la cimentación de un edificio está representada por cinco fuerzas.
Si éstas se representan por medio de una fuerza F, ¿qué valor tiene
F y en qué punto interseca su línea de acción el eje x?
Problema 4.140
4.141 Tanto la suma vectorial de las fuerzas que actúan sobre
la viga mostrada, como la suma de los momentos respecto al
extremo izquierdo de la viga, son iguales a cero.
a) Determine las fuerzas Ax y Ay y el par MA.
b) Determine la suma de los momentos respecto al extremo
derecho de la viga.
c) Si la fuerza de 600 N, la fuerza de 200 N y el par de 30 N-m se
representan con una fuerza F que actúa en el extremo izquierdo de
la viga y un par M, ¿qué valores tienen F y M?
y
x
80 kN
3m
35 kN
30 kN
40 kN
3m
3m
3m
85 kN
Problema 4.143
y
600 N
MA
x
Ax
30 N-m
200 N
Ay
380 mm
Problema 4.141
180 mm
184
Capítulo 4 Sistemas de fuerzas y momentos
4.144 En un instante particular, las fuerzas aerodinámicas distribuidas sobre un avión ejercen las fuerzas verticales de 88 kN
y 16 kN y el par en sentido contrario al movimiento de las
manecillas del reloj de 22 kN-m que se muestran en la figura.
Si las fuerzas y el par se representan mediante un sistema
consistente en una fuerza F que actúe en el centro de masa G y
un par M, ¿cuáles son los valores de F y M?
4.145 Si las dos fuerzas y el par que actúan sobre el avión de la
figura se representan mediante una fuerza F, ¿cuál es el valor de
F, y dónde interseca su línea de acción al eje x?
y
88 kN
4.148 La tensión en el cable AB que se muestra en la figura es de
400 N y la tensión en el cable CD es de 600 N.
a) Si las fuerzas ejercidas por los cables sobre el poste izquierdo se
representan mediante una fuerza F que actúa en el origen O y un
par M, ¿qué valores tienen F y M?
b) Si las fuerzas ejercidas por los cables sobre el poste izquierdo
se representan con una sola fuerza F, ¿dónde interseca su línea de
acción al eje y?
4.149 La tensión en cada uno de los cables AB y CD mostrados
es de 400 N. Si las fuerzas ejercidas por ellos sobre el poste
derecho se representan con una fuerza F, ¿cuál es el valor de F y
dónde interseca su línea de acción al eje y?
y
16 kN
x
G
A
5m
22 kN-m
5.7 m
400 mm
9m
4.146 El sistema mostrado se encuentra en equilibrio. Si las
fuerzas FAB y FAC se representan mediante una fuerza F que actúa
en A y un par M, ¿qué valor tienen F y M?
60 40
FAB
C
100 lb
D
O
300 mm
x
800 mm
FAC
4.150 Si las tres fuerzas que actúan sobre la sección transversal
de la viga mostrada se representan con una fuerza F, ¿cuál es el
valor de F y dónde interseca su línea de acción al eje x?
A
A
300 mm
Problemas 4.148/4.149
y
B
B
C
Problemas 4.144/4.145
100 lb
y
x
500 lb
Problema 4.146
4.147 Tres fuerzas actúan sobre la viga que se muestra en la figura.
a) Represente el sistema mediante una fuerza F que actúe en el
origen O y un par M.
b) Represente el sistema mediante una sola fuerza. ¿Dónde
interseca la línea de acción de la fuerza al eje x?
800 lb
6 pulg
x
6 pulg
z
y
500 lb
30 N
Problema 4.150
5m
x
O
30 N
6m
4m
Problema 4.147
50 N
4.151 En el ejemplo activo 4.12, suponga que la fuerza FB se
cambia a FB 20i 15j 30k (kN), y se desea representar el
sistema 1 mediante un sistema equivalente que consista en una
fuerza F actuando en el punto P con coordenadas (4, 3, 2) m y
un par M (sistema 2). Determine F y M.
Problemas
4.152 Una ménsula de pared está sometida a la fuerza mostrada.
a) Determine el momento ejercido por la fuerza respecto al eje z.
b) Determine el momento ejercido por la fuerza respecto al eje y.
c) Si la fuerza se representa mediante una fuerza F que actúa en
O y un par M, ¿qué valores tienen F y M?
185
4.154 En el ejemplo 4.14, suponga que la fuerza ascendente de
30 lb en el sistema 1 se cambia a una fuerza ascendente de 25 lb.
Si se desea representar el sistema 1 mediante una sola fuerza F
(sistema 2), ¿dónde interseca la línea de acción de F al plano x–z?
4.155 Las fuerzas normales ejercidas por el camino sobre las
llantas del automóvil mostrado son
NA = 5104j 1N2,
y
NB = 5027j 1N2,
10i 30j 3k (lb)
O
NC = 3613j 1N2,
12 pulg
z
ND = 3559j 1N2.
Si estas fuerzas se representan mediante una sola fuerza equivalente N, ¿cuál es el valor de N y dónde interseca su línea de acción al plano x–z?
x
C
A
0.8 m
Problema 4.152
x
0.8 m
4.153 Un jugador de baloncesto realiza una “clavada” y luego
se cuelga momentáneamente del aro, ejerciendo las dos fuerzas
de 100 lb que se muestran en la figura. Las dimensiones son
h 14.5 pulg y r 9.5 pulg, y el ángulo a 120°.
a) Si las fuerzas que el jugador ejerce se representan mediante una
fuerza F que actúa en O y un par M, ¿qué valores tienen F y M?
b) El tablero de vidrio se romperá si M 4000 lb-pulg. ¿Se
rompe?
D
1.4 m
1.4 m
B
z
y
x
y
100j (lb)
Problema 4.155
4.156 Dos fuerzas actúan sobre la viga que se muestra en la
figura. Si se representan mediante una fuerza F que actúa en C
y un par M, ¿qué valores tienen F y M?
O
a
r
y
100j (lb)
100 N
h
x
z
80 N
Problema 4.153
z
C
3m
Problema 4.156
x
186
Capítulo 4 Sistemas de fuerzas y momentos
4.157 Una fuerza axial de magnitud P actúa sobre la viga
mostrada. Si se representa mediante una fuerza F que actúa en
el origen O y un par M, ¿qué valores tienen F y M?
b
4.160 Dos ejes están sujetos a los pares de torsión mostrados.
a) Si los dos pares se representan mediante una fuerza F que
actúa en el origen O y un par M, ¿qué valores tienen F y M?
b) ¿Cuál es la magnitud del momento total ejercido por los dos
pares?
y
Pi
z
6 kN-m
h
O
4 kN-m
x
40
y
30
x
Problema 4.157
z
4.158 El berbiquí de la figura se está usando para quitar un tornillo.
a) Si las fuerzas que actúan sobre el berbiquí se representan
mediante una fuerza F que actúa en el origen O y un par M,
¿qué valores tienen F y M?
b) si las fuerzas que actúan sobre el berbiquí se representan
mediante una fuerza F que actúa en un punto P con coordenadas
(xP, yP, zP) y un par M, ¿qué valores tienen F y M?
Problema 4.160
4.161 Los dos sistemas de fuerzas y momentos que actúan sobre
la barra son equivalentes. Si
FA = 30i + 30j - 20k 1kN2,
FB = 40i - 20j + 25k 1kN2,
MB = 10i + 40j - 10k 1kN-m2,
y
¿qué valores tienen F y M?
h
r
h
y
B
z
O
FA
1
A
2
A
B
x
z
2m
y
F
y
P
z
FB 2i j (kN)
x
1m
x
Sistema 1
4.159 Dos fuerzas y un par actúan sobre el cubo de la figura. Si
se representan mediante una fuerza F que actúa en el punto P y un
par M, ¿qué valores tienen F y M?
z
B
FB
Problema 4.158
FA i j k (kN)
A
2m
1
A
2
MB
MC 4i 4j 4k (kN-m)
Problema 4.159
x
M
Sistema 2
Problema 4.161
Problemas
4.162 El punto G se encuentra en el centro del bloque mostrado.
Las fuerzas son
FA = - 20i + 10j + 20k 1lb2,
FB = 10j - 10k 1lb2.
Si las dos fuerzas se representan mediante una fuerza F que actúa
en G y un par M, ¿qué valores tienen F y M?
187
4.165 La tensión en el cable AB de la figura es de 100 lb, la
tensión en el cable CD es de 60 lb. Suponga que se desea
reemplazar esos dos cables con un solo cable EF tal que la
fuerza ejercida sobre la pared en E sea equivalente a las
dos fuerzas ejercidas por los cables AB y CD sobre las paredes
en A y C. ¿Cuál es la tensión en el cable EF y cuáles son las
coordenadas de los puntos E y F?
y
y
y
FB
FA
C
(4, 6, 0) pies
(0, 6, 6) pies
10 pulg
x
E
G
x
A
20 pulg
z
x
D
(7, 0, 2) pies
30 pulg
B
F
(3, 0, 8) pies
Problema 4.162
z
4.163 El motor sobre el fuselaje del avión mostrado en la figura
ejerce un empuje T0 de 16 kip, y cada motor bajo las alas ejerce
un empuje TU de 12 kip. Las dimensiones son h 8 pies, c 12
pies y b 16 pies. Si las tres fuerzas se representan mediante una
fuerza F que actúa en el origen O y un par M, ¿qué valores tienen
F y M?
z
Problema 4.165
4.166 La distancia s 4 m en la figura. Si la fuerza y el par
de 200 N-m se representan mediante una fuerza que actúa en el
origen O y un par M, ¿qué valores tienen F y M?
y
4.164 Considere el avión descrito en el problema 4.163 y suponga que el motor bajo el ala a la derecha del piloto pierde la fuerza
de empuje.
a) Si las dos fuerzas de empuje restantes se representan mediante
una fuerza F que actúa en el origen O y un par M, ¿qué valores
tienen F y M?
b) Si las dos fuerzas de empuje restantes se representan sólo mediante la fuerza F, ¿dónde interseca su línea de acción al plano x–y?
(2, 6, 0) m
s
100i 20j 20k (N)
O
200 N-m
y
T0
c
O
z
h
Problema 4.166
2 TU
y
x
O
b
b
Problemas 4.163/4.164
(4, 0, 3) m
z
x
188
Capítulo 4 Sistemas de fuerzas y momentos
4.173 El sistema 1 consiste en dos fuerzas y un par. Suponga que
se desea representar mediante una llave de torsión (sistema 2).
Determine la fuerza F, el par Mp y las coordenadas x y z donde la
línea de acción de la fuerza interseca el plano x–z.
4.167 La fuerza F y el par M del sistema 1 mostrado son
F = 12i + 4j - 3k 1lb2,
M 4i 7j 4k (pies-lb).
Suponga que se desea representar el sistema 1 mediante una llave
de torsión (sistema 2). Determine el par Mp y las coordenadas x y
z donde la línea de acción de la fuerza interseca al plano x–z.
Sistema 1
Sistema 2
Sistema 1
y
1000i 600j (kN-m)
600k (kN)
y
y
Sistema 2
y
300j (kN)
3m
Mp
x
M
x
4m
z
F
O
O
x
z
z
Problema 4.173
x
(x, 0, z)
Problema 4.167
4.168 Un sistema consiste en una fuerza F que actúa en el origen
O y un par M, donde
F 10i (lb),
M 20j (pies-lb).
4.174 Un plomero ejerce las dos fuerzas mostradas para aflojar
un tubo.
a) ¿Qué momento total ejerce el plomero respecto al eje del tubo?
b) Si las dos fuerzas se representan mediante una fuerza F que
actúa en O y un par M, ¿qué valores tienen F y M?
c) Si las dos fuerzas se representan mediante una llave de torsión
que consiste en la fuerza F y un par paralelo Mp, ¿qué valor tiene
Mp y dónde interseca la línea de acción de F al plano x–y?
Si el sistema se representa mediante una llave de torsión que
consiste en la fuerza F y un par paralelo Mp, ¿qué valor tiene
Mp y dónde interseca la línea de acción de F al plano y–z?
y
12 pulg
6 pulg
O
4.169 Un sistema consiste en una fuerza F que actúa en el origen
O y un par M, donde
F = i + 2j + 5k 1N2,
(x, 0, z)
z
F
Mp
F
M = 10i + 8j - 4k 1N-m2.
Si el sistema se representa mediante una llave de torsión que
consiste en la fuerza F y un par paralelo Mp, a) determine Mp, y
encuentre el punto donde la línea de acción de F interseca b) al
plano x–z y c) al plano y–z.
4.170 Considere la fuerza F que actúa en el origen O y el
par M dados en el ejemplo 4.15. Si este sistema se representa
mediante una llave de torsión, ¿en qué punto interseca la línea
de acción de la fuerza al plano x–y?
4.171 Considere la fuerza F que actúa en el origen O y el
par M dados en el ejemplo 4.15. Si este sistema se representa
mediante una llave de torsión, ¿dónde interseca la línea de acción de la fuerza al plano y 3 m?
4.172 Una llave de torsión consiste en una fuerza de magnitud
100 N que actúa en el origen O y un par de magnitud 60 N-m. La
fuerza y el par señalan en la dirección de O al punto (1, 1, 2) m. Si
la llave de torsión se representa mediante una fuerza F que actúa
en el punto (5, 3, 1) m y un par M, ¿qué valores tienen F y M?
z
x
16 pulg
16 pulg
50k (lb)
70k (lb)
Problema 4.174
189
Problemas de repaso
Problemas de repaso
4.175 La torre inclinada de Pisa tiene alrededor de 55 m de
altura y 7 m de diámetro. El desplazamiento horizontal de la parte
superior de la torre desde la vertical es de aproximadamente 5 m.
Su masa aproximada es de 3.2 106 kg. Si la torre se modela
como un cilindro y se supone que su peso actúa en el centro,
¿cuál es la magnitud del momento ejercido por el peso respecto
al punto en el centro de la base de la torre?
4.177 Tres fuerzas actúan sobre la estructura mostrada. La suma
de los momentos debidos a las fuerzas respecto a A es igual a
cero. Determine la magnitud de la fuerza F.
30
45
2 kN
4 kN
b
5m
A
F
2b
b
b
Problema 4.177
4.178 Determine el momento de la fuerza de 400 N (a) respecto
a A y (b) respecto a B.
Problema 4.175
30
4.176 El cable AB ejerce una fuerza de 300 N sobre el soporte
A, la cual apunta desde A hacia B. Determine la magnitud del
momento que ejerce la fuerza respecto al punto P.
y
400 N
220 mm
A
260 mm
B
B
(0.3, 0.6) m
500 mm
Problema 4.178
A
(0.4, 0.3) m
x
P
(0.5, 0.2) m
4.179 Determine la suma de los momentos ejercidos respecto a
A por las tres fuerzas y el par que se muestran en la figura.
4.180 Si las tres fuerzas y el par mostrados en la figura se
representan mediante un sistema equivalente que consiste en
una fuerza F actuando en A y en un par M, ¿qué valor tienen
las magnitudes de F y M?
Problema 4.176
A
5 pies
300 lb
800 pies-lb
200 lb
200 lb
6 pies
3 pies
Problemas 4.179/4.180
190
Capítulo 4 Sistemas de fuerzas y momentos
4.181 Tanto la suma vectorial de las fuerzas que actúan sobre la
viga mostrada, como la suma de los momentos respecto a A, son
iguales a cero.
a) ¿Qué valor tienen las fuerzas Ax, Ay y B?
b) ¿Qué valor tiene la suma de los momentos respecto a B?
4.183 La fuerza F 60i 60j (lb).
a) Determine el momento de F respecto al punto A.
b) ¿Cuál es la distancia perpendicular del punto A a la línea de
acción de F?
y
F
30
220 mm
Ay
(4, 4, 2) pies
x
400 N
Ax
A
(8, 2, 12) pies
260 mm
z
Problema 4.183
500 mm
B
Problema 4.181
4.182 El pistón hidráulico BC que se muestra en la figura ejerce
una fuerza de 970 lb sobre el larguero en C en la dirección paralela
al pistón. El ángulo a 40°. La suma de los momentos respecto a
A debidos a la fuerza ejercida por el pistón sobre el larguero y al
peso de la carga suspendida es igual a cero. ¿Cuál es el peso de la
carga suspendida?
4.184 Una masa de 20 kg está suspendida mediante cables unidos
a tres postes verticales de 2 metros de altura como se muestra en
la figura. El punto A está en (0, 1.2, 0) m. Determine el momento
respecto a la base E debido a la fuerza ejercida por el cable AB
sobre el poste BE.
y
C
B
D
A
ies
1m
6p
1m
E
9
s
pie
C
2m
0.3 m
z
x
Problema 4.184
a
A
B
6 pies
4.185 ¿Cuál es el valor del momento total debido a los dos pares
mostrados en la figura?
a) Exprese la respuesta proporcionando la magnitud y estableciendo
si el momento está en dirección al movimiento de las manecillas del
reloj o es contrario a éste.
b) Exprese la respuesta como un vector
y
100 N
Problema 4.182
4m
100 N
2m
x
2m
100 N
4m
100 N
Problema 4.185
Problemas de repaso
4.186 La barra AB que soporta la tapa del piano ejerce una fuerza
F 6i 35j 12k (lb) en B. Las coordenadas de B son (3, 4, 3)
pies. ¿Qué valor tiene el momento de la fuerza respecto a la línea de
bisagras de la tapa (eje x)?
y
B
4.189 El sistema de cables y poleas mostrado en la figura soporta el peso de 300 lb de la plataforma de trabajo. Si la fuerza ejercida hacia arriba en E por el cable EF y la fuerza ascendente
ejercida en G por el cable GH se representan mediante una sola
fuerza equivalente F, ¿cuál es el valor de F y en dónde interseca
su línea de acción al eje x?
4.190 El sistema de cables y poleas mostrado en la figura
soporta el peso de 300 lb de la plataforma de trabajo.
x
a) ¿Qué valor tienen las tensiones en los cables AB y CD?
b) Si las fuerzas ejercidas por los cables en A y C se representan
mediante una sola fuerza equivalente F, ¿qué valor tiene F y
dónde interseca su línea de acción el eje x?
A
z
H
F
Problema 4.186
E
B
4.187 Determine el momento de la fuerza vertical de 800 lb que
se muestra en la figura respecto al punto C.
4.188 Determine el momento de la fuerza vertical de 800 lb que
se muestra en la figura respecto a la línea recta que pasa por los
puntos C y D.
G
D
y
A
60
60
y
Problemas 4.189/4.190
800 lb
A (4, 3, 4) pies
B
D (6, 0, 0) pies
x
C (5, 0, 6) pies
Problemas 4.187/4.188
C
x
8 pies
z
191
192
Capítulo 4 Sistemas de fuerzas y momentos
4.191 Los dos sistemas mostrados en la figura son equivalentes.
Determine las fuerzas Ax y Ay y el par MA.
4.192 Si los sistemas equivalentes del problema 4.191 se representan mediante una fuerza F que actúa en el origen y un par M,
¿qué valores tienen F y M?
4.193 Si los sistemas equivalentes del problema 4.191 se representan mediante una fuerza F, ¿qué valor tiene F y dónde interseca su línea de acción al eje x?
4.195 Los remolcadores A y B de la figura ejercen fuerzas
FA 1 kN y FB 1.2 kN sobre el barco. El ángulo u 30°. Si
las dos fuerzas se representan mediante una fuerza F que actúa
en el origen O y un par M, ¿qué valores tienen F y M?
4.196 Los remolcadores A y B de la figura ejercen fuerzas
FA 600 N y FB 800 N sobre el barco. El ángulo u 45°.
Si las dos fuerzas se representan mediante una fuerza F, ¿qué
valor tiene F y dónde interseca su línea de acción al eje y?
Sistema 1
y
4.197 Los remolcadores A y B de la figura desean ejercer dos
fuerzas sobre el barco que sean equivalentes a una fuerza F de
2 kN de magnitud actuando en el origen O. Si FA 800 N,
determine los valores necesarios de FB y u.
20 N
400 mm
Ax
x
y
Ay
30 N
600 mm
400 mm
Sistema 2
y
A
FA
8 N-m
60 m
400 mm
MA
O
10 N
20 N
x
60 m
x
FB
80 N
600 mm
400 mm
u
B
Problemas 4.191–4.193
4.194 Los dos sistemas mostrados son equivalentes. Si
25 m
F = - 100i + 40j + 30k 1lb2,
M 80i 120j 40k (pulg-lb).
Problemas 4.195–4.197
determine F y M.
Sistema 1
y
Sistema 2
y
4 pulg
4 pulg
M
F
Fⴕ
Mⴕ
6 pulg
6 pulg
x
x
6 pulg
6 pulg
z
z
Problema 4.194
Problemas de repaso
4.198 Si las fuerzas ejercidas por el piso sobre las patas de la
mesa mostrada en la figura se representan mediante una fuerza F
que actúa en el origen O y un par M, ¿qué valores tienen F y M?
4.199 Si las fuerzas ejercidas por el piso sobre las patas de la mesa
mostrada en la figura se representan mediante una fuerza F, ¿qué
valor tiene F y dónde interseca su línea de acción al plano x–z?
y
2m
1m
Proyecto de diseño En la figura se muestra un dispositivo
relativamente primitivo para ejercitar los bíceps. Sugiera una
configuración mejorada para el dispositivo. Pueden usarse
cuerdas elásticas (que se comportan como resortes lineales),
pesos y poleas. Busque un diseño tal que la variación del
momento respecto al codo cuando se use el dispositivo sea
pequeño en comparación con el diseño mostrado. Tenga en
consideración la seguridad de su dispositivo, su confiabilidad
y el requisito de permitir a los usuarios tener un rango de
dimensiones y resistencias. Al elegir dimensiones específicas,
determine el rango de la magnitud del momento ejercido
respecto al codo cuando se utiliza su dispositivo.
50 N
B
x
42 N
48 N
pu
lg
z
15
50 N
Problemas 4.198/4.199
4.200 Las bielas ejercen dos fuerzas sobre el cigüeñal de la figura.
Los cosenos directores de FA son cos ux 0.182, cos uy 0.818
y cos uz 0.545, y su magnitud es de 4 kN. Los cosenos directores
de FB son cos ux 0.182, cos uy 0.818 y cos uz 0.545, y su
magnitud es de 2 kN. Si las dos fuerzas se representan mediante
una fuerza F que actúa en el origen O y un par M, ¿qué valores
tienen F y M?
4.201 Si las dos fuerzas ejercidas sobre el cigüeñal del problema
4.200 se representan mediante una llave de torsión que consiste en
una fuerza F y un par paralelo Mp, ¿qué valores tienen F y MP y
en qué punto interseca la línea de acción de F al plano x–z?
y
FB
FA
360 mm
O
z
160 mm
80 mm
80 mm x
Problemas 4.200/4.201
193
E
a
10 pulg
A
5 pulg
CAPÍTULO
5
Objetos en equilibrio
Con base en los conceptos desarrollados en los capítulos
3 y 4, primero se establecen las ecuaciones generales de
equilibrio y se describen las diferentes formas en que los
elementos estructurales pueden apoyarse o mantenerse
en su lugar. Después, mediante el uso de diagramas de
cuerpo libre y ecuaciones de equilibrio, se muestra cómo
determinar las fuerzas y pares desconocidos que ejercen
los soportes sobre los elementos estructurales. La motivación principal para este procedimiento es que representa el paso inicial para responder una pregunta
esencial en el análisis estructural: ¿Cómo diseñan los
ingenieros elementos estructurales capaces de soportar
las cargas a las cuales están sometidos?
La viga está en equilibrio bajo las acciones de su peso y las fuerzas
ejercidas por las cadenas. En este capítulo se aplican ecuaciones de
equilibrio para determinar las fuerzas y pares desconocidos que actúan
sobre los objetos.
196
Capítulo 5 Objetos en equilibrio
5.1 Aplicaciones bidimensionales
ANTECEDENTES
Cuando un objeto sobre el cual actúa un sistema de fuerzas y momentos está en
equilibrio, se satisfacen las siguientes condiciones:
1. La suma de las fuerzas es igual a cero:
©F = 0.
(5.1)
2. La suma de los momentos respecto a cualquier punto es igual a cero:
Mcualquier punto 0.
(5.2)
A partir del análisis realizado para los sistemas equivalentes de fuerzas y momentos
en el capítulo 4, las ecuaciones (5.1) y (5.2) implican que el sistema de fuerzas y
momentos que actúan sobre un objeto en equilibrio es equivalente a un sistema en el
que no se incluyen fuerzas ni pares. Esto ayuda a comprender la naturaleza del equilibrio. Desde el punto de vista de la fuerza total y el momento total ejercidos sobre
un objeto en equilibrio, los efectos son iguales que si no se aplicara ninguna fuerza
y ningún par sobre dicho cuerpo. Esta observación también aclara que si la suma de
las fuerzas sobre un objeto es igual a cero y la suma de los momentos respecto a un
punto también es nula, entonces la suma de los momentos respecto a cualquier punto
será igual a cero.
Ecuaciones de equilibrio escalares
Cuando las cargas y reacciones sobre un objeto en equilibrio forman un sistema
bidimensional de fuerzas y momentos, éstos se relacionan mediante tres ecuaciones de equilibrio escalares:
Fx 0,
(5.3)
Fy 0,
(5.4)
Mcualquier punto 0.
(5.5)
Una pregunta natural es: ¿Se puede obtener más de una relación a partir de la ecuación (5.5) evaluando la suma de los momentos respecto a más de un punto? La respuesta es sí, y en muchos casos resulta conveniente hacerlo de esta manera. Pero
debe considerarse lo siguiente: las ecuaciones adicionales no serán independientes de las ecuaciones (5.3)-(5.5). En otras palabras, no se pueden obtener más de tres
ecuaciones de equilibrio independientes a partir de un diagrama de cuerpo libre
bidimensional. Lo anterior implica que, cuando mucho, es posible resolver un sistema de tres fuerzas o pares desconocidos. Este punto se analiza a mayor profundidad en la sección 5.2.
Soportes
Cuando una persona está de pie, el piso la soporta. Cuando alguien está sentado en
una silla con los pies en el piso, la silla y el piso lo soportan. En esta sección se
estudiará cómo los objetos pueden soportarse o mantenerse en su lugar. Las fuerzas
y pares ejercidos sobre un objeto por sus soportes se denominan reacciones, lo que
expresa el hecho de que los soportes “reaccionan” a las otras fuerzas y pares, o
cargas, que actúan sobre el objeto. Por ejemplo, un puente se sostiene gracias a las
reacciones ejercidas por sus soportes, y las cargas son las fuerzas ejercidas por el
peso del mismo puente, el tráfico que lo cruza y el viento.
Algunos tipos muy comunes de soportes se representan con modelos estilizados llamados convenciones de soporte. Los soportes reales a menudo se parecen a
5.1 Aplicaciones bidimensionales
Ménsula
Pasador Cuerpo soportado
(b)
(a)
y
x
Ax
Ay
(c)
(d)
Figura 5.1
(a) Soporte de pasador.
(b) Vista lateral que muestra el pasador que atraviesa la viga.
(c) Sujeción de una barra soportada.
(d) El soporte de pasador es capaz de ejercer dos componentes de fuerza.
los modelos estilizados, pero aunque no se parecieran, se representan por medio de
estos modelos si los soportes reales ejercen las mismas (o aproximadamente las
mismas) reacciones que los modelos.
Soporte de pasador En la figura 5.1a se muestra un soporte de pasador. En
el diagrama se representa una ménsula a la cual está unido un objeto (una viga, por
ejemplo) con un pasador liso que pasa por la ménsula y el objeto. La vista lateral
se muestra en la figura 5.1b.
Para entender las reacciones que puede generar un soporte de pasador resulta
útil imaginar la sujeción de una barra unida a un soporte de pasador (figura 5.1c).
Si se trata de mover la barra sin hacerla girar (es decir, trasladar la barra), el soporte ejerce una fuerza reactiva que lo impide. Sin embargo, se puede hacer girar la
barra alrededor del eje del pasador. El soporte no puede generar un par respecto al
eje del pasador para impedir el giro. Así, un soporte de pasador no puede generar
un par respecto al eje del pasador, pero sí puede ejercer una fuerza sobre un cuerpo
en cualquier dirección, lo que comúnmente se expresa representando la fuerza en
términos de sus componentes (figura 5.1d). Las flechas indican las direcciones de
las reacciones si Ax y Ay son positivas. Si se determina que Ax o Ay son negativas, la
reacción tendrá la dirección opuesta a la de la flecha.
El soporte de pasador se usa para representar cualquier soporte real capaz
de ejercer una fuerza en cualquier dirección sin generar un par. Hay soportes de
pasador en muchos dispositivos comunes, particularmente los diseñados para
permitir que partes conectadas giren una respecto a la otra (figura 5.2).
Soporte de rodillo La convención llamada soporte de rodillo (figura 5.3a) es
un soporte de pasador montado sobre ruedas. Como el soporte de pasador, éste no
puede generar un par respecto al eje del pasador. Dado que puede moverse libremente en la dirección paralela a la superficie sobre la que rueda, no puede generar
una fuerza paralela a la superficie, sino sólo una fuerza normal (perpendicular) a
ella (figura 5.3b). En las figuras 5.3c-e se muestran otras convenciones usadas
comúnmente como equivalentes al soporte de rodillo. Las ruedas de vehículos y
que soportan partes de máquinas son soportes de rodillo si las fuerzas de fricción
ejercidas sobre ellas son insignificantes en comparación con las fuerzas normales.
Una superficie plana y lisa también se puede representar por medio de un soporte
Soportes de pasador
Figura 5.2
Soportes de pasador en una tijera y una
engrapadora.
197
198
Capítulo 5 Objetos en equilibrio
Cuerpo soportado
Pasador
Ménsula
A
Figura 5.3
(a) Soporte de rodillos.
(b) La reacción consiste en una fuerza normal
a la superficie.
(c)–(e) Soportes equivalentes al soporte de
rodillos.
(a)
(b)
Soportes
equivalentes
(c)
Figura 5.4
Soporte de un objeto por medio de una superficie plana y lisa.
(d)
(e)
de rodillo (figura 5.4). Las vigas y los puentes a veces están soportados de esta
manera, para que absorban dilataciones y contracciones térmicas.
Los soportes de la figura 5.5 son similares al soporte de rodillo en que no
pueden generar un par sino sólo una fuerza normal a una dirección particular (la
fricción se ignora). El cuerpo soportado está unido a un pasador o collarín que se
mueve libremente en una dirección pero no en la perpendicular (la fricción es
insignificante.) En estos soportes, el objeto soportado está unido a un pasador o
collarín que puede moverse libremente en una dirección pero está restringido en
la dirección perpendicular. A diferencia de los soportes de rodillo, estos soportes
pueden ejercer una fuerza normal en cualquier sentido.
Soporte fijo El soporte fijo presenta el objeto soportado literalmente empotrado en la pared (figura 5.6a). Esta convención también se denomina soporte
empotrado. Para entender sus reacciones, imagínese sujetando una barra unida a
un soporte fijo (figura 5.6b). Si intenta trasladar la barra, el soporte genera una
Figura 5.5
Soportes similares al soporte de rodillo excepto
que la fuerza normal se puede ejercer en cualquier dirección.
(a)
(a) Pasador en
una ranura.
(b)
(c)
(b) Pistón en
una ranura.
A
(c) Collarín sobre
un eje.
Cuerpo soportado
(b)
(a)
y
MA
Figura 5.6
(a) Soporte fijo.
(b) Sujeción de una barra empotrada.
(c) Reacciones que es capaz de ejercer un
soporte fijo.
x
Ax
Ay
(c)
5.1 Aplicaciones bidimensionales
fuerza reactiva que lo impide; si trata de hacerla girar, el soporte genera un par
reactivo que lo impide. Un soporte fijo puede generar dos componentes de fuerza
y un par (figura 5.6c). El término MA es el par generado por el soporte y la flecha
curva indica su dirección. Los postes de bardas y los del alumbrado público tienen
soportes fijos. Las uniones de partes conectadas que no pueden moverse una con
respecto a la otra, como la cabeza y el mango de un martillo, pueden modelarse
como soportes fijos.
En la tabla 5.1 se resumen las convenciones de soportes usadas comúnmente
en aplicaciones bidimensionales, incluidas las del capítulo 3. Aunque el número de
Tabla 5.1
Soportes usados en aplicaciones bidimensionales.
Reacciones
Soportes
T
Cuerda o cable
Resorte
Una fuerza colineal
A
Una fuerza normal
a la superficie de soporte
Contacto con una superficie lisa
y
Ax
x
Ay
Dos componentes de fuerza
Contacto con una superficie rugosa
y
x
Ax
Ay
Dos componentes de fuerza
Soporte de pasador
Soporte de rodillo
A
Una fuerza normal
a la superficie de soporte
Equivalentes
A
Una fuerza normal
y
Pasador guiado o collarín
MA
Ax
Soporte fijo (empotrado)
x
Ay
Dos componentes
de fuerza y un par
199
200
Capítulo 5 Objetos en equilibrio
convenciones puede parecer muy grande, los ejemplos y problemas ayudarán a
familiarizarse con ellas. También se recomienda observar cómo están soportados
algunos de los objetos que se ven en la vida diaria e intentar representar sus soportes con algunas de las convenciones.
Diagramas de cuerpo libre
En el capítulo 3 se presentaron los diagramas de cuerpo libre y se usaron para determinar las fuerzas que actúan sobre cuerpos simples en equilibrio. Mediante las convenciones de soportes es posible representar cuerpos más elaborados y construir en
forma sistemática sus diagramas de cuerpo libre.
Por ejemplo, la viga de la figura 5.7a tiene un soporte de pasador en su extremo izquierdo y uno de rodillo en el derecho, y está cargada con una fuerza F. El
soporte de rodillo descansa sobre una superficie inclinada 30° respecto a la horizontal. Para obtener el diagrama de cuerpo libre de la viga se aísla de sus soportes
(figura 5.7b), dado que el diagrama no debe contener más cuerpos que la viga. Se
completa el diagrama con las reacciones que pueden generar los soportes sobre la
viga (figura 5.7c). Observe que la reacción B generada por el soporte de rodillo es
normal a la superficie sobre la que descansa.
El objeto de la figura 5.8a tiene un soporte fijo en su extremo izquierdo. El
cable que pasa por una polea está unido al cuerpo en dos puntos. Se aísla el cuerpo
de sus soportes (figura 5.8b) y se completa el diagrama de cuerpo libre con las
reacciones en el soporte fijo y las fuerzas ejercidas por el cable (figura 5.8c). No
olvide el par en el soporte fijo. Como se supuso que la tensión en el cable es la
misma en ambos lados de la polea, las dos fuerzas ejercidas por el cable tienen
la misma magnitud T.
Después de haber obtenido el diagrama de cuerpo libre de un objeto en equilibrio mostrando las cargas y reacciones que actúan sobre él, se pueden aplicar
las ecuaciones de equilibrio.
F
F
A
A
B
B
30
(b)
(a)
y
F
A
B
x
Ax
B
Ay
30
Reacciones debidas
al soporte de pasador
Reacciones debidas
al soporte de rodillo
(c)
Figura 5.7
(a) Viga con soportes de pasador y de rodillo.
(b) La viga se aísla de sus soportes.
(c) Diagrama de cuerpo libre completo.
5.1 Aplicaciones bidimensionales
201
Reacciones debidas
al cable
T
y
MA
A
A
A
T
x
Ax
Ay
Reacciones debidas
al soporte fijo
(a)
(b)
(c)
Figura 5.8
(a) Objeto con un soporte fijo.
(b) Aislamiento del objeto.
(c) Diagrama de cuerpo libre completo.
RESULTADOS
Ecuaciones de equilibrio
La suma de fuerzas es igual a cero:
Cuando un objeto está en
equilibrio, el sistema de
fuerzas y momentos que
actúa sobre él satisface
dos condiciones.
Cuando el sistema de fuerzas y
momentos que actúa sobre un objeto
en equilibrio es bidimensional, satisface
tres ecuaciones de equilibrio escalar.
F 0.
(5.1)
La suma de los momentos respecto a
cualquier punto es igual a cero:
Mcualquier punto 0.
(5.2)
Fx 0,
(5.3)
Fy 0,
(5.4)
Mcualquier punto 0.
(5.5)
Soportes
y
x
Ax
Soporte de pasador
Para dibujar el diagrama de cuerpo
libre de un objeto, éste se aísla de sus
soportes y se muestran las reacciones,
las fuerzas y los momentos que pueden ejercer los soportes (tabla 5.1).
Soporte de rodillo
Ay
Componentes de dos fuerzas
A
Una fuerza normal a la
superficie de soporte
y
MA
Ax
Soporte fijo (empotrado)
x
Ay
Componentes de dos fuerzas
y un par
202
Capítulo 5 Objetos en equilibrio
Ejemplo activo 5.1
Reacciones en un soporte fijo ( Relacionado con el problema 5.1)
La viga que se muestra en la figura tiene un soporte fijo en A y está sujeta a una
fuerza de 4 kN. a) Dibuje el diagrama de cuerpo libre de la viga y b) determine las
reacciones en el soporte fijo.
4 kN
A
2m
Estrategia
Para dibujar el diagrama de cuerpo libre de la viga, éste debe aislarse del soporte empotrado y mostrar las reacciones que puede ejercer el soporte. Después pueden aplicarse las ecuaciones de equilibrio para determinar las reacciones desconocidas.
Solución
(a) Dibuje un diagrama de la viga
aislada de su soporte fijo y muestre
las reacciones debidas al soporte.
y
4 kN
Ax
x
(b) Escriba las ecuaciones de equilibrio
MA A
y
Fx Ax 0,
2m
Fy Ay 4 kN 0,
Mextremo izquierdo MA (2 m) (4 kN) 0,
y resuélvalas, para obtener
Ax 0, Ay 4 kN, MA 8 kN-m.
Problema de práctica La viga que se muestra en la figura tiene soportes de pasador
y rodillo y está sujeta a una fuerza de 4 kN. (a) Dibuje el diagrama de cuerpo libre de la
viga. (b) Determine las reacciones en los soportes.
4 kN
A
B
2m
3m
Respuesta: Ax 0, Ay 1.33 kN, B 2.67 kN.
5.1 Aplicaciones bidimensionales
Reacciones en un soporte fijo ( Relacionado con el problema 5.9)
Ejemplo 5.2
El objeto de la figura tiene un soporte fijo en A y está sometido a dos fuerzas y un
par. ¿Qué valor tienen las reacciones en el soporte?
100 lb
30°
2 pies
200 lb
A
300 pies-lb
2 pies
2 pies
2 pies
Estrategia
Se obtendrá un diagrama de cuerpo libre aislando el objeto del soporte fijo en A
y mostrando las reacciones ejercidas en dicho punto, se incluirá el par que puede
ser ejercido por un soporte fijo. Luego pueden determinarse las reacciones desconocidas al aplicar las ecuaciones de equilibrio.
Solución
Dibujo del diagrama de cuerpo libre. Se aísla el cuerpo de su soporte y se muestran las reacciones en el soporte fijo (figura a). Hay tres reacciones desconocidas:
dos componentes de fuerza Ax y Ay y un par MA (recuerde que las direcciones de esas
flechas pueden escogerse de manera arbitraria). También se puede descomponer la
fuerza de 100 lb en sus componentes.
200 lb
100 lb
100 lb
30
y 100 sen 30 lb
200 lb
MA
A
A
300 pies-lb
Ax
Aplicación de ecuaciones de equilibrio
punto A, las ecuaciones de equilibrio son
x
300 pies-lb
Ay
2
pies
100 cos 30 lb
2 pies
2
pies
2
pies
Si se suman los momentos respecto al
Fx Ax 100 cos 30° lb 0,
Fy Ay 200 lb 100 sen 30° lb 0,
Mpunto A MA 300 pies-lb (2 pies)(200 lb) (2 pies)(100 cos 30° lb)
(4 pies)(100 sen 30° lb) 0.
Al resolver esas ecuaciones se obtienen las reacciones Ax 86.6 lb, Ay 150 lb
y MA 73.2 pies-lb.
Razonamiento crítico
¿Por qué el par de 300 pies-lb y el par MA, generados por el soporte fijo, no aparecen en las dos primeras ecuaciones de equilibrio? Recuerde que un par no ejerce
una fuerza neta. Asimismo, como el momento debido a un par es el mismo respecto a cualquier punto, el momento respecto al punto A debido al par en sentido
contrario al movimiento de las manecillas del reloj de 300 pies-lb es de 300 pies-lb
en este mismo sentido.
(a) Dibujo del diagrama de cuerpo libre.
203
204
Capítulo 5 Objetos en equilibrio
Elección del punto respecto al cual evaluar los momentos ( Problema
Ejemplo 5.3
relacionado 5.15)
2m
2m
La estructura AB que se muestra en la figura soporta una masa suspendida de 2 Mg
(megagramos). La estructura está unida a un pistón en una ranura vertical en A y tiene
un soporte de pasador en B. ¿Qué valor tienen las reacciones en A y B?
B
3m
Estrategia
Se dibujará el diagrama de cuerpo libre de la estructura y la masa suspendida removiendo los soportes en A y B. Observe que el soporte en A puede ejercer sólo
una reacción horizontal. Después pueden usarse las ecuaciones de equilibrio para
determinar las reacciones en A y B.
A
Solución
Dibujo del diagrama de cuerpo libre Se aísla la estructura y la masa de los
soportes y se muestran las reacciones en éstos y la fuerza ejercida por el peso de la
masa de 2000 kg (figura a). La ranura en A puede ejercer sólo una fuerza horizontal
sobre el pistón.
B
Aplicación de las ecuaciones de equilibrio Si se suman los momentos respecto
al punto B, se encuentra que las ecuaciones de equilibrio son
A
y
Fx A Bx 0,
By
2m
Fy By (2000)(9.81) N 0,
2m
B
Bx
3m
Mpunto B (3 m)A (2 m)[(2000)(9.81) N] 0.
Las reacciones son A 13.1 kN, Bx 13.1 kN y By 19.6 kN.
A
x
A
(2000)(9.81) N
(a) Dibujo del diagrama de cuerpo libre.
Ejemplo 5.4
Razonamiento crítico
Aunque el punto respecto al cual se evalúan los momentos para escribir las ecuaciones de equilibrio se puede elegir de manera arbitraria, a menudo una elección
cuidadosa puede simplificar la solución. En este ejemplo, el punto B está sobre
las líneas de acción de las dos reacciones desconocidas Bx y By. Al evaluar los
momentos respecto a B, se obtuvo una ecuación que contiene sólo una incógnita,
la reacción en A.
Análisis de un portaequipaje ( Relacionado con los problemas 5.65–5.68)
En la figura se muestran un portaequipaje mantenido en equilibrio en posición inclinada y su diagrama de cuerpo libre. Si el portaequipaje soporta un peso W 50
lb, a 30°, a 8 pulg, b 16 pulg y d 48 pulg, ¿qué fuerza F debe ejercer
el usuario?
Estrategia
Las reacciones desconocidas en el diagrama de cuerpo libre son la fuerza F y la
fuerza normal N ejercida por el piso. Sumando momentos respecto al centro de
la rueda C, se obtiene una ecuación donde F es la única reacción desconocida.
Problemas
205
F
d
A
W
b
h
a
a
R
C
N
Solución
Sumando momentos respecto a C,
M(punto C) d(F cos a) a(W sen a) b(W cos a) 0,
y despejando F, se obtiene
F =
1b - a tan a2W
d
.
Sustituyendo los valores de W, a, a, b y d, la solución es F 11.9 lb.
Problemas
Suponga que los objetos están en equilibrio. En los
enunciados de las respuestas, las componentes x
son positivas hacia la derecha y las componentes
y son positivas hacia arriba.
5.1 En el ejemplo activo 5.1, suponga que la viga está sometida a
un par en sentido contrario al movimiento de las manecillas del reloj
de 6 kN en el extremo derecho, además de la fuerza descendente de
4 kN. Dibuje los diagramas de cuerpo libre de la viga y aplique las
ecuaciones de equilibrio para determinar las reacciones en A.
5.2 La viga de la figura tiene un soporte fijo en A y está cargada
por dos fuerzas y un par. Dibuje el diagrama de cuerpo libre de la
viga y aplique las ecuaciones de equilibrio para determinar las
reacciones en A.
5.3 La viga que se muestra en la figura está sujeta a la carga
F 400 N y se encuentra soportada por la cuerda y las superficies lisas en A y B.
a) Dibuje el diagrama de cuerpo libre de la viga.
b) ¿Cuáles son las magnitudes de las reacciones en A y B?
F
A
B
30
45
1.2 m
4 kN
A
6 kN-m
60
1m
1.5 m
1.5 m
Problema 5.2
1.5 m
2 kN
Problema 5.3
1m
206
Capítulo 5 Objetos en equilibrio
5.4 a) Dibuje el diagrama de cuerpo libre de la viga de la figura.
b) Determine la tensión en la cuerda y las reacciones en B.
30
5.7 La mesa de planchar mostrada tiene soportes en A y B que
pueden modelarse como soportes de rodillo.
a) Dibuje el diagrama de cuerpo libre de la mesa.
b) Determine las reacciones en A y B.
y
30 600 lb
B
A
A
B
x
9 pies
5 pies
3 lb
10 lb
12
pulg
Problema 5.4
5.5 a) Dibuje el diagrama de cuerpo libre de la prensa perforadora de 60 lb de peso mostrada, suponiendo que las superficies
de A y B son lisas.
b) Determine las reacciones en A y B.
10
pulg
20
pulg
Problema 5.7
5.8 La distancia x en la figura es de 9 m.
a) Dibuje el diagrama de cuerpo libre de la viga.
b) Determine las reacciones en los soportes.
10 kN
A
B
6m
60 lb
x
Problema 5.8
A
B
10 pulg
14 pulg
Problema 5.5
5.6 Las masas del clavadista y del trampolín son de 54 kg y 36 kg,
respectivamente. Suponga que están en equilibrio.
a) Dibuje el diagrama de cuerpo libre del trampolín.
b) Determine las reacciones en los soportes A y B.
5.9 En el ejemplo 5.2, suponga que la fuerza descendente de
200 lb y el par en sentido contrario al movimiento de las manecillas del reloj de 300 pies-lb cambian lugares; la fuerza descendente
de 200 lb actúa en el extremo derecho de la barra horizontal, y el
par en sentido contrario al movimiento de las manecillas del reloj de
300 pies-lb actúa sobre la barra horizontal de 2 pies a la derecha
del soporte A. Haga un bosquejo del objeto donde muestre la nuevas
cargas. Dibuje el diagrama de cuerpo libre del objeto y aplique las
ecuaciones de equilibrio para determinar las reacciones en A.
5.10 a) Dibuje el diagrama de cuerpo libre de la viga que se
muestra en la figura.
b) Determine las reacciones en los soportes.
100 lb
A
400 lb
B
900 pies-lb
WP
B
WD
A
1.2 m
3 pies
4 pies
3 pies
2.4 m
Problema 5.10
4.6 m
Problema 5.6
4 pies
207
Problemas
5.11 Una persona ejerce fuerzas de 20 N sobre las pinzas que se
muestran en la figura. Se presenta el diagrama de cuerpo libre de
una parte de ellas. Observe que el pasador en C que conecta las
dos partes de las pinzas se comporta como un soporte de pasador.
Determine las reacciones en C y la fuerza B ejercidas por el perno
sobre las pinzas.
5.13 a) Dibuje el diagrama de cuerpo libre de la viga.
b) Determine las reacciones en los soportes.
y
A
6m
40 kN
B
x
8m
12 m
Problema 5.13
25
mm
5.14 a) Dibuje el diagrama de cuerpo libre de la viga.
b) Si F 4 kN, ¿cuáles son las reacciones en A y en B?
80
mm
B
2 kN-m
A
C
F 0.2 m
0.3 m
Cx
Cy
0.2 m
50 mm
45
20 N
C
0.3 m
0.4 m
B
Problema 5.14
20 N
5.15 En el ejemplo 5.3, suponga que el punto de unión para
la masa suspendida se mueve hacia el punto B de forma que la
distancia horizontal de A al punto de unión aumenta de 2 a 3 m.
Trace un bosquejo de la viga AB mostrando la nueva geometría.
Dibuje el diagrama de cuerpo libre de la viga y aplique las ecuaciones de equilibrio para determinar las reacciones en A y en B.
20 N
Problema 5.11
5.16 Un hombre que hace ejercicio se detiene en la posición
mostrada. Su peso W es de 180 lb y actúa en el punto que se
muestra en la figura. Las dimensiones son a 15 pulg, b 42
pulg y c 16 pulg. Determine la fuerza normal ejercida por el
piso sobre cada una de sus manos y sobre cada uno de sus pies.
5.12 a) Dibuje el diagrama de cuerpo libre de la viga.
b) Determine las reacciones en el soporte del pasador A.
8 kN
8 kN
2 kN-m
A
600
mm
500
mm
600
mm
30
B
600
mm
c
W
Problema 5.12
a
b
Problema 5.16
208
Capítulo 5 Objetos en equilibrio
5.17 El pistón hidráulico AB que se muestra en la figura ejerce
una fuerza de 400 lb sobre la escalera en B, en la dirección paralela
al pistón. Determine el peso de la escalera y las reacciones en C.
5.20 La longitud sin elongar del resorte CD que se muestra en
la figura es de 350 mm. Suponga que se desea que la palanca
ABC ejerza una fuerza normal de 120 N sobre la superficie lisa
en A. Determine el valor necesario de la constante k del resorte
y las reacciones resultantes en B.
C
6 pies
k
230
mm
W
D
3 pies
A
450
mm
B
C
6 pies
20
3
pies
A
Problema 5.17
330
mm
5.18 Dibuje el diagrama de cuerpo libre de la estructura mostrada
aislándola de sus soportes en A y E. Determine las reacciones en
A y E.
D
300
mm
Problema 5.20
5.21 En la figura se muestra un móvil que está en equilibrio. El
pez B pesa 27 onzas. Determine los pesos de los peces A, C y D.
(Los pesos de las barras son insignificantes).
400 lb
2 pies
12 pulg
200 pies-lb
1 pie
180
mm
B
A
B
C
A
6 pulg
100 lb
1 pie
7 pulg
2 pulg
C
D
2 pies
2 pulg
B
E
2 pies
3 pulg
2 pies
Problema 5.18
Problema 5.21
5.19 a) Dibuje el diagrama de cuerpo libre de la viga.
b) Determine la tensión en el cable y las reacciones en A.
5.22 La base de las ruedas del automóvil que se muestra en la figura (la distancia entre las ruedas) es de 2.82 m. La masa del automóvil
es de 1760 kg y su peso actúa en el punto x 2.00 m, y 0.68 m.
Si el ángulo a 15°, ¿qué valor tiene la fuerza normal total ejercida
por la rampa inclinada sobre las dos llantas traseras?
y
A
B
30°
30 pulg
30 pulg
C
x
800 lb
30 pulg
Problema 5.19
a
Problema 5.22
Problemas
5.23 El eslabón AB mostrado ejerce una fuerza paralela al eslabón sobre la cubeta de la excavadora en A. El peso W 1500 lb.
Dibuje el diagrama de cuerpo libre de la cubeta y determine las
reacciones en C (la conexión en C es equivalente a un soporte de
pasador para la cubeta).
14 pulg
16 pulg
B
209
5.25 La masa del remolque mostrado es de 2.2 Mg (megagramos).
Las distancias son a 2.5 m y b 5.5 m. La camioneta está en
reposo y las ruedas del remolque pueden girar libremente, lo cual significa que el camino no ejerce ninguna fuerza horizontal sobre ellas.
El enganche en B puede modelarse como un soporte de pasador.
a) Dibuje el diagrama de cuerpo libre del remolque.
b) Determine la fuerza normal total ejercida sobre las llantas
traseras en A y las reacciones ejercidas sobre el remolque en el
soporte de pasador B.
A
B
4 pulg
C
W
A
a
b
Problema 5.25
W
8
pulg
5.26 El peso total de la carretilla que se muestra en la figura y su
carga es W 100 lb. (a) ¿Cuál es la magnitud de la fuerza ascendente F necesaria para levantar del suelo el soporte en A? (b)
¿Cuál es la magnitud de la fuerza descendente necesaria para levantar la rueda del suelo?
8
pulg
Problema 5.23
5.24 La sierra de cadena que se muestra en la figura pesa 14.5 lb
y está sometida a las cargas en A ejercida por el tronco que está
cortando. Determine las reacciones R, Bx y By que debe aplicar un
operador para mantener la sierra en equilibrio.
F
W
y
R
60
B
A
By 7 pulg
1.5 pulg
40 pulg
12 pulg
x
A
Problema 5.26
Bx
5 lb
14.5 lb
10 lb
13 pulg
2
pulg
6 pulg
14
pulg
5.27 El peso del avión que se muestra en la figura es W 2400 lb.
Sus frenos mantienen bloqueadas las ruedas traseras. La rueda
frontal (nariz) puede girar libremente, es decir, el suelo no ejerce
ninguna fuerza horizontal sobre ella. La fuerza T ejercida por la
hélice del aeroplano es horizontal.
a) Dibuje el diagrama de cuerpo libre del avión. Determine la reacción ejercida sobre la rueda frontal y la reacción normal total
ejercida sobre las ruedas traseras.
b) cuando T 0;
c) cuando T 250 lb.
Problema 5.24
T
4 pies
W
A
5 pies
B
2
pies
Problema 5.27
210
Capítulo 5 Objetos en equilibrio
5.28 Un ingeniero de seguridad trata de establecer límites sobre las cargas que pueden ser manejadas por un montacargas y para ello
analiza la situación mostrada. Las dimensiones son a 32 pulg, b 30 pulg y c 26 pulg. El peso combinado del montacargas y el
operador es WF 1200 lb. Conforme el peso WL soportado por el montacargas aumenta, la fuerza normal ejercida sobre el piso por las
llantas traseras en B disminuye. El montacargas está a punto de voltearse hacia delante cuando la fuerza normal en B es igual a cero.
Determine el valor de WL que causará esta condición.
WL
WF
A
a
B
b
c
Problema 5.28
5.29 Los paleontólogos especulan que el estegosaurio podía apoyarse sobre sus patas traseras por cortos periodos de tiempo para
alimentarse. Con base en el diagrama de cuerpo libre mostrado y suponiendo que m 2000 kg, determine las magnitudes de las
fuerzas B y C ejercidas por el ligamento del músculo y por la columna vertebral; también calcule el ángulo a.
580
mm
160
mm
B
22
C
a
415
mm
Problema 5.29
790
mm
mg
Problemas
5.30 El peso del ventilador mostrado es W 20 lb. Su base tiene
cuatro patas igualmente espaciadas de longitud b 12 pulg. Cada
pata tiene una almohadilla cerca del extremo, la cual hace contacto
con el piso y soporta al ventilador. La altura h 32 pulg. Si las
aspas del ventilador ejercen un empuje T 2 lb, ¿qué valor tiene
la fuerza normal total ejercida sobre las dos patas en A?
5.33 Una fuerza F 400 N actúa sobre la ménsula mostrada.
¿Qué valor tienen las reacciones en A y B?
F
A
5.31 El peso del ventilador mostrado es W 20 lb. Su base
tiene cuatro patas igualmente espaciadas de longitud b 12 pulg.
Cada pata tiene una almohadilla cerca del extremo, la cual hace
contacto con el piso y soporta al ventilador. La altura h 32 pulg.
Conforme el empuje T del ventilador aumenta, la fuerza normal
en A disminuye. Cuando la fuerza normal en A es igual a cero,
el ventilador está a punto de voltearse. Determine el valor de T
que causará esta condición.
80 mm
B
320 mm
Problema 5.33
5.34 El peso del letrero es Ws 32 lb y actúa en el punto mostrado en la figura. El peso de 10 lb de la barra AD actúa en el
punto medio de la barra. Determine la tensión en el cable AE y las
reacciones en D.
T
b
W
11
pulg
30 pulg
11
pulg
E
h
T
A
211
B
30°
Vista lateral
Vista superior
Problemas 5.30/5.31
20°
A
B
5.32 Como una medida para disminuir costos, el fabricante del
ventilador descrito en el problema 5.31 propone soportar un ventilador con tres patas igualmente espaciadas en vez de usar el
sistema de cuatro patas. Se le asigna a un ingeniero de seguridad
el análisis de las implicaciones del cambio propuesto. El peso del
ventilador disminuye a W 19.6 lb. Las dimensiones b y h no
cambian. ¿Cuál valor del empuje T causará que el ventilador esté
a punto de voltearse en este caso? Compare su respuesta con la
solución al problema 5.31.
b
C
D
Ws
33 pulg
T
Problema 5.34
Problema 5.32
212
Capítulo 5 Objetos en equilibrio
5.35 El dispositivo mostrado ayuda a una persona a levantar
cargas pesadas (dispositivos de este tipo se usaron en Egipto
alrededor del año 1550 a.C. y aún se usan en varias partes del
mundo). Las dimensiones son a 3.6 m y b 1.2 m. La masa
de la barra y el contrapeso es de 90 kg, y su peso W actúa en el
punto mostrado. La masa de la carga que se está levantando es
de 45 kg. Determine la fuerza vertical que la persona debe ejercer
para soportar la carga en reposo a) cuando la carga está justo
sobre el suelo (la posición mostrada); b) cuando la carga está a
1 m sobre el suelo (suponga que la cuerda permanece vertical).
5.37 Un gimnasta olímpico está en reposo en la posición “cruz
de hierro”. En la figura se muestra el peso de su brazo izquierdo
y el peso de su cuerpo, sin incluir los brazos. Las distancias son
a b 9 pulg y c 13 pulg Considere el hombro S como un
soporte fijo y determine las magnitudes de las reacciones en éste,
es decir, determine la fuerza y el par que el hombro debe soportar.
a
S
b
25
8 lb
144 lb
W
a
5.36 La estructura mostrada, llamada armadura, tiene un soporte
de pasador en A y un soporte de rodillo en B, y está cargada por
dos fuerzas. Determine las reacciones en los apoyos.
Estrategia: Dibuje un diagrama de cuerpo libre, tratando la
armadura entera como un solo objeto.
5.38 Determine las reacciones en A de la figura.
A
5 pies
800 pies-lb
300 lb
200 lb
30° 2 kN
45°
200 lb
b
B
A
b
b
b
Problema 5.36
c
Problema 5.37
Problema 5.35
4 kN
b
b
3 pies
6 pies
Problema 5.38
213
Problemas
5.39 Los frenos del auto inmovilizan las ruedas traseras, pero
las ruedas frontales pueden girar. Determine las fuerzas ejercidas
por el suelo sobre las ruedas frontales y traseras cuando el auto
está estacionado a) sobre una pendiente de subida con a 15°
y b) sobre una pendiente de bajada con a 15°.
5.43 Determine las reacciones en el soporte fijo A.
y
30 lb
40 lb
150 pies-lb
45
A
x
ulg
70 p
36
pulg
ulg x
20 p
3 pies
3 pies
y
6 pies
Problema 5.43
3300 lb
a
Problema 5.39
5.40 La longitud de la barra mostrada es L 4 pies. Su peso
W 6 lb actúa en el punto medio de la barra. El piso y la pared
son lisos. El resorte está sin elongar cuando el ángulo a 0. Si
la barra está en equilibrio cuando a 40°, ¿qué valor tiene la
constante k del resorte?
5.44 Suponga que se desea representar las dos fuerzas y el par
que actúan sobre la viga en el problema 5.43 por una fuerza
equivalente F como lo muestra la figura. a) Determine F y la
distancia D a la que su línea de acción cruza el eje x. b) Suponga
que F es la única carga que actúa sobre la viga y determine las
reacciones en el soporte fijo en A. Compare sus respuestas con
la solución al problema 5.43.
y
F
A
5.41 El peso W de la barra mostrada actúa en su punto medio.
El piso y la pared son lisos. El resorte está sin elongar cuando el
ángulo a 0. Determine el ángulo a en el que la barra está en
equilibrio en términos de W, k y L.
x
D
Problema 5.44
5.45 El freno de bicicleta que se muestra en la figura está unido
al bastidor mediante un pasador en A. Determine la fuerza ejercida
por la almohadilla del freno sobre el borde de la rueda en B, en
términos de la tensión T en el cable.
k
α
T
L
35°
Problemas 5.40/5.41
5.42 La placa de la figura está soportada por un pasador en una
ranura lisa en B. ¿Qué valor tienen las reacciones en los soportes?
40 mm
B
2 kN-m
6 kN-m
A
B
Almohadilla
del freno
Borde de
la rueda
A
60
40 mm
2m
Problema 5.42
45 mm
Problema 5.45
214
Capítulo 5 Objetos en equilibrio
5.46 La masa de cada uno de los pesos suspendidos es de 80 kg.
Determine las reacciones en los soportes en A y en E.
5.47 Los pesos suspendidos tienen cada uno una masa m. Los
apoyos en A y en E soportarán cada uno una fuerza con magnitud
de 6 kN. Con base en este criterio, ¿cuál es el valor máximo
seguro de m?
A
B
5.50 Determine las reacciones en los soportes mostrados.
6 pulg
5 pulg
50 lb
A
3 pulg
100 pulg-lb
3 pulg
B
C
30
Problema 5.50
300 mm
D
5.51 En la figura, el peso W 2 kN. Determine la tensión en el
cable y las reacciones en A.
E
200 mm
5.52 El cable mostrado en la figura soportará con seguridad
una tensión de 6 kN. Con base en este criterio, ¿cuál es el valor
máximo del peso W que puede soportarse con seguridad?
200 mm
Problemas 5.46/5.47
30°
A
5.48 La tensión en el cable BC mostrado es de 100 lb. Determine
las reacciones en el soporte fijo.
W
C
0.6 m
0.6 m
Problemas 5.51/5.52
6 pies
A
B
300 pies-lb
200 lb
3
pies
3
pies
6
pies
Problema 5.48
5.49 La tensión en el cable AB mostrado es de 2 kN. ¿Qué valor
tienen las reacciones en C en cada caso?
A
60
B C
A
60
5.53 Los bloques que están siendo comprimidos por la mordaza
de la figura ejercen una fuerza de 200 N sobre el pasador en D, la
cual apunta desde A hacia D. El eje roscado BE ejerce una fuerza
sobre el pasador en E que apunta desde B hacia E.
a) Dibuje un diagrama de cuerpo libre del brazo DCE de la
mordaza, suponiendo que el pasador en C se comporta como un
soporte de pasador.
b) Determine las reacciones en C.
5.54 Los bloques que están siendo comprimidos por la mordaza
de la figura ejercen una fuerza de 200 N sobre el pasador en A, la
cual apunta desde D hacia A. El eje roscado BE ejerce una fuerza
sobre el pasador en B que apunta desde E hacia B.
a) Dibuje un diagrama de cuerpo libre del brazo ABC de la
mordaza, suponiendo que el pasador en C se comporta como un
soporte de pasador.
b) Determine las reacciones en C.
B C
125 mm
125 mm
125 mm
B
2m
1m
(a)
2m
1m
(b)
Problema 5.49
50 mm
E
A
50 mm
C
50 mm
D
Problemas 5.53/5.54
Problemas
5.55 Suponga que se quiere diseñar una válvula de seguridad de
manera que ésta se abra cuando la diferencia entre la presión p en
el tubo circular (diámetro 150 mm) y la presión atmosférica sea
de 10 MPa (megapascales: un pascal es 1 N/m2). El resorte está
comprimido 20 mm cuando la válvula se encuentra cerrada. ¿Qué
valor debe tener la constante del resorte?
150 mm
215
5.57 El brazo de la grúa tiene un soporte de pasador en A. El
cilindro hidráulico BC ejerce una fuerza sobre el brazo en C con
una dirección paralela a BC. El brazo de la grúa tiene una masa
de 200 kg, y puede suponerse que su peso actúa en un punto 2 m
a la derecha de A. Si la masa de la caja suspendida es de 800 kg
y el sistema está en equilibrio, ¿cuál es la magnitud de la fuerza
ejercida por el cilindro hidráulico?
5.58 En el problema 5.57, ¿cuál es la magnitud de la fuerza ejercida sobre el brazo de la grúa por el soporte de pasador en A?
250 mm
k
A
p
C
150 mm
A
2.4 m
Problema 5.55
1m
5.56 El peso de 10 lb de la barra AB mostrada actúa en el punto
medio de la barra. La longitud de la barra es 3 pies. Determine la
tensión en la cuerda BC y las reacciones en A.
B
1.8 m
1.2 m
7m
Problemas 5.57/5.58
C
5.59 Un sistema de bocinas está suspendido mediante cables
unidos en D y E. La masa del sistema de bocinas es 130 kg y su
peso actúa en G. Determine las tensiones en los cables y las
reacciones en A y C.
0.5 m 0.5 m 0.5 m
B
3 pies
0.5 m
1m
E
C
A
A
30
1m
B
D
1 pie
Problema 5.56
G
Problema 5.59
216
Capítulo 5 Objetos en equilibrio
5.60 En la figura, el peso W1 1000 lb. Ignore el peso de la
barra AB. El cable pasa sobre una polea en C. Determine el peso
W2 y las reacciones en el soporte de pasador en A.
B
5.63 El pescante de la grúa soporta una carga suspendida de 15
kip. Cada una de los largueros BC y DE tiene 20 pies de longitud.
Las distancias son a 15 pies y b 2 pies, y el ángulo u 30°.
Determine la tensión en el cable AB y las reacciones en los
soportes de pasador C y D.
B
E
50°
35°
W1
A
C
u
W2
A
Problema 5.60
C
a
5.61 Las dimensiones en la figura son a 2 m y b 1 m. El
par M 2400 N-m. La constante del resorte k 6000 N/m y
el resorte no se encontraría elongado si h 0. El sistema está en
equilibrio cuando h 2 m y la viga está en posición horizontal.
Determine la fuerza F y las reacciones en A.
k
h
A
D
b
Problema 5.63
5.64 El dispositivo mostrado controla los elevadores de un
avión (los elevadores son las superficies de control horizontal
en la cola del avión). Los elevadores están unidos al elemento
EDG. Las presiones aerodinámicas sobre los elevadores ejercen
un par horario de 120 pulg-lb. El cable BG está flojo y su tensión
se puede ignorar. Determine la fuerza F y las reacciones en el
soporte de pasador en A.
M
B
6 pulg
F
a
b
Problema 5.61
k
a
b
Problema 5.62
W
D
2.5 pulg
3.5
pulg
5.62 La barra tiene una longitud de 1 m y su peso W actúa en
su punto medio. La distancia b 0.75 m y el ángulo a 30°.
La constante del resorte es k 100 N/m, y el resorte no está
elongado cuando la barra se encuentra en posición vertical.
Determine W y las reacciones en A.
A
A
C
F
2 pulg
Elevador
E
2.5 pulg 2.5 pulg
120
pulg-lb
G
1.5 pulg
120 pulg
(No está a escala)
Problema 5.64
5.65 En el ejemplo 5.4, suponga que a 40°, d 1 m,
a 200 mm, b 500 mm, R 75 mm, y la masa del equipaje
es 40 kg. Determine F y N.
5.66 En el ejemplo 5.4, suponga que a 35°, d 46 pulg,
a 10 pulg, b 14 pulg, R 3 pulg, y no se desea que el
usuario tenga que ejercer una fuerza F mayor a 20 lb. ¿Cuál
es el peso máximo del equipaje que puede colocarse sobre el
carrito?
5.2 Cuerpos estáticamente indeterminados
5.67 Una de las dificultades al tomar decisiones de diseño
es que no se sabe cómo el usuario colocará el equipaje sobre
el carrito del ejemplo 5.4. Si usted supone que el punto donde el
peso actúa puede estar dentro de la “envoltura” R a 0.75c y
0 b 0.75d. Si a 30°, c 14 pulg, d 48 pulg, R 3 pulg
y W 80 lb, ¿cuál es la fuerza máxima F que el usuario tendrá
que ejercer para cualquier colocación del equipaje?
5.68 En el ejemplo 5.4, suponga un usuario que sujetaría la
manija del portaequipajes en h 36 pulg por encima del piso.
Asuma que R 3 pulg, a 6 pulg, b 12 pulg y d 4 pies. La
razón resultante de la fuerza que el usuario debe ejercer contra el
peso del equipaje es FW 0.132. Suponga que este portaequipaje
lo usan personas con una variedad de alturas. Obtenga una gráfica
de FW como una función de h para 24 h 36 pulg.
5.2 Cuerpos estáticamente indeterminados
ANTECEDENTES
En la sección 5.1 se analizaron ejemplos en los que se pueden usar las ecuaciones
de equilibrio para determinar fuerzas y pares desconocidos actuando sobre objetos en
equilibrio. Es necesario que se conozcan dos situaciones comunes en las que este
procedimiento no conduce a la solución. Primero, el diagrama de cuerpo libre de un
cuerpo puede tener más fuerzas o pares desconocidos que el número de ecuaciones
independientes de equilibrio que se pueden obtener. Por ejemplo, como no se pueden escribir más de tres de tales ecuaciones para un diagrama de cuerpo libre en un
problema bidimensional, si hay más de tres incógnitas, éstas no se pueden determinar sólo con ecuaciones de equilibrio. Esto ocurre, por ejemplo, si un cuerpo tiene
más soportes que el mínimo necesario para mantenerlo en equilibrio. Se dice que
tal cuerpo tiene soportes redundantes. La segunda situación es cuando los soportes
de un cuerpo están diseñados en forma impropia, de modo que no pueden mantener
el equilibrio bajo las cargas actuantes. Se dice entonces que el objeto tiene soportes
impropios. En cualquiera de estas situaciones se dice que el cuerpo es estáticamente
indeterminado.
Los ingenieros usan soportes redundantes para aumentar la resistencia y la
seguridad siempre que es posible. Sin embargo, algunos diseños requieren que el
objeto se soporte en forma incompleta de manera que pueden realizar con libertad ciertos movimientos. Estas dos situaciones —más soportes de los necesarios
para el equilibrio o soportes insuficientes— son tan comunes que se analizarán en
detalle.
Soportes redundantes
Considere una viga con un soporte fijo (figura 5.9a). De su diagrama de cuerpo
libre (figura 5.9b), se obtienen las ecuaciones de equilibrio
©Fx = A x = 0,
©Fy = A y - F = 0,
L
©Mpoint
punto A = MA - a bF = 0.
2
Suponiendo que se conoce la carga F, se tienen tres ecuaciones y tres reacciones desconocidas, para las cuales se obtienen las soluciones Ax 0, Ay F y MA FL2.
y
F
F
MA
A
A
x
Ax
Ay
L
2
L
2
(a)
L
2
L
2
(b)
217
Figura 5.9
(a) Viga con un soporte fijo.
(b) El diagrama de cuerpo libre tiene tres
reacciones desconocidas.
218
Capítulo 5 Objetos en equilibrio
y
F
MA
F
Figura 5.10
(a) Viga con un soporte fijo y un soporte de
rodillo.
(b) El diagrama de cuerpo libre tiene cuatro
reacciones desconocidas.
A
B
L
2
(a)
A
B
x
Ax
Ay
B
L
2
L
2
L
2
(b)
Ahora suponga que se añade un soporte de rodillo en el extremo derecho de la
viga (figura 5.10a). Del nuevo diagrama de cuerpo libre (figura 5.10b) se obtienen
las ecuaciones de equilibrio
©Fx = A x = 0,
©Fy = A y - F + B = 0,
L
©Mpoint
punto A = MA - a bF + LB = 0.
2
(5.6)
(5.7)
(5.8)
Ahora se tienen tres ecuaciones y cuatro reacciones desconocidas. Aunque la primera ecuación indica que Ax 0, no es posible resolver las ecuaciones (5.7) y
(5.8) para las reacciones Ay, B y MA.
Cuando enfrentan esta situación, algunos estudiantes intentan sumar momentos respecto a otro punto, como el B, para obtener una ecuación adicional:
L
©Mpoint
punto B = MA + a bF - L A y = 0.
2
Por desgracia esto no ayuda. No se trata de una ecuación independiente sino de una
combinación lineal de las ecuaciones (5.7) y (5.8):
L
©Mpoint
punto B = MA + a bF - L A y
2
L
= MA - a bF + L B - L1A y - F + B2.
2
(''')'''*
(''')'''*
Eq. (5.8)
15.82
Ecuación
Eq. (5.7)
15.72
Ecuación
Como lo demuestra este ejemplo, cada soporte adicional en un objeto cualquiera
conlleva reacciones adicionales. La diferencia entre el número de reacciones y el
número de ecuaciones independientes de equilibrio se denomina grado de redundancia. Aun si un cuerpo es estáticamente indeterminado debido a sus soportes
redundantes, quizá sea posible determinar algunas de las reacciones con las ecuaciones de equilibrio. Observe que en los ejemplos anteriores fue posible determinar la reacción Ax aunque no se pudo determinar las otras reacciones.
Como los soportes redundantes son tan ubicuos, podría surgir la pregunta de
por qué se invierte tanto esfuerzo en enseñar a analizar cuerpos cuyas reacciones
se pueden determinar con las ecuaciones de equilibrio. Se desea desarrollar una
comprensión del concepto de equilibrio y se quiere que el estudiante practique la
formulación de las ecuaciones correspondientes. Las reacciones sobre un cuerpo
con soportes redundantes se pueden determinar complementando las ecuaciones
de equilibrio con ecuaciones adicionales que relacionen las fuerzas y pares actuantes sobre el objeto con su deformación o cambio de forma. Por ello, la obtención
de las ecuaciones de equilibrio es el primer paso para su solución.
5.2 Cuerpos estáticamente indeterminados
219
Soportes impropios
Se dice que un objeto tiene soportes impropios si no permanece en equilibrio bajo
la acción de las cargas ejercidas sobre él. Así, un cuerpo con soportes impropios
se moverá al aplicarle cargas. En problemas bidimensionales, esto puede ocurrir
de dos maneras:
1. Los soportes sólo pueden ejercer fuerzas paralelas. Esto deja al cuerpo con
libertad para moverse en la dirección perpendicular a las fuerzas de soporte. Si
las cargas ejercen una componente de fuerza en esa dirección, el objeto no
estará en equilibrio. En la figura 5.11a se muestra un ejemplo de esta situación.
Los dos soportes de rodillo pueden ejercer sólo fuerzas verticales, mientras que
la fuerza F tiene una componente horizontal. La viga se moverá horizontalmente cuando se aplique F. Esto se resulta evidente en el diagrama de cuerpo
libre (figura 5.11b). La suma de las fuerzas en la dirección horizontal no puede
ser igual a cero porque los soportes de rodillo sólo pueden ejercer reacciones
verticales.
2. Los soportes sólo pueden ejercer fuerzas concurrentes. Si las cargas ejercen un
momento respecto al punto en que las líneas de acción de las fuerzas de soporte
se intersecan, el cuerpo no estará en equilibrio. Por ejemplo, considere la viga
de la figura 5.12a. De su diagrama de cuerpo libre (figura 5.12b) se observa que
las reacciones A y B no ejercen momento respecto al punto P, que es donde sus
líneas de acción se cortan, pero esto sí ocurre en el caso de la carga F. La suma
de los momentos respecto a P no es igual a cero y la viga girará cuando se
aplique la carga.
F
B
A
(a)
F
A
B
A
B
(b)
Figura 5.11
(a) Una viga con dos soportes de
rodillo no está en equilibrio cuando
se somete a la carga mostrada.
(b) La suma de las fuerzas en la
dirección horizontal no es igual a
cero.
Excepto cuando se abordan de manera explícita soportes impropios, en estos
ejemplos los objetos tienen soportes adecuados. Debe desarrollarse el hábito de
examinar cuerpos en equilibrio y reflexionar si están adecuadamente soportados
según las cargas que actúan sobre ellos.
Las líneas de
acción de las
reacciones se
intersecan.
P
F
A
F
B
A
45
45
(a)
A
B
45
45
B
(b)
RESULTADOS
Se dice que un objeto apoyado es estáticamente indeterminado en dos circunstancias:
Soportes redundantes
El objeto tiene más soportes que el número mínimo necesario para
mantener el equilibrio. La diferencia entre el número de reacciones
debidas a los soportes y el número de ecuaciones de equilibrio
independientes se denomina grado de redundancia.
Soportes impropios
Los soportes no pueden mantener al objeto en equilibrio bajo las cargas
que actúan sobre él.
Figura 5.12
(a) Una viga con soportes de rodillo sobre
superficies inclinadas.
(b) La suma de los momentos respecto al
punto P no es igual a cero.
220
Capítulo 5 Objetos en equilibrio
Ejemplo activo 5.5
Reconocimiento de un objeto estáticamente indeterminado ( Relacionado con
el problema 5.69)
La viga tiene dos soportes de pasador y está cargada con una fuerza de 2 kN.
a) Demuestre que la viga es estáticamente indeterminada y encuentre el grado de
redundancia.
b) Determine tantas reacciones como le sea posible.
2 kN
B
A
3m
2m
Estrategia
La viga es estáticamente indeterminada si su diagrama de cuerpo libre tiene más
reacciones desconocidas que el número de ecuaciones independientes de equilibrio
que se pueden obtener. La diferencia entre el número de reacciones y el número de
ecuaciones de equilibrio es el grado de redundancia. Aun si la viga es estáticamente indeterminada, es posible resolver las ecuaciones de equilibrio para algunas
de las reacciones.
Solución
y
2 kN
A
B
x
Ax
Bx
Ay
By
Dibuje el diagrama de cuerpo libre.
Hay cuatro reacciones
desconocidas.
Fx Ax Bx 0,
Fy Ay By 2 kN 0,
Escriba las ecuaciones de equilibrio.
Mpunto A (5 m)By (3 m)(2 kN) 0.
Hay tres ecuaciones de equilibrio independientes, consecuentemente,
la viga es estáticamente indeterminada y el grado de redundancia es
4 3 1. No es posible determinar Ax o Bx a partir de las ecuaciones
de equilibrio, pero se puede determinar Ay y By.
(3 m)(2 kN)
1.2 kN,
(5 m)
Ay 2 kN By 0.8 kN.
By Determine las reacciones Ay y By.
Problema de práctica Suponga que el soporte de pasador en el punto A de la viga se
reemplaza con un soporte fijo. (a) Demuestre que la viga es estáticamente indeterminada
y encuentre el grado de redundancia. (b) Determine tantas reacciones como sea posible.
Respuesta: (a) El grado de redundancia es 2. (b) No puede determinarse ninguna reacción.
5.2 Cuerpos estáticamente indeterminados
Soportes adecuados e impropios ( Relacionado con los problemas 5.75, 5.76)
Ejemplo 5.6
Indique si las barras en L están adecuadamente soportadas. Si una barra está adecuadamente soportada, determine las reacciones en sus soportes.
Estrategia
Al dibujar el diagrama de cuerpo libre de cada barra es posible determinar si las
reacciones de los soportes pueden ejercer sólo fuerzas paralelas o concurrentes
sobre ésta. En caso de ser así, se puede reconocer si la carga aplicada resulta en que
la barra no esté en equilibrio.
B
B
F
L
L
L
A
A
A
B
F
F
L
L
(a)
L
(b)
(c)
Solución
Considere los diagramas de cuerpo libre de las barras (que se muestran abajo):
Barra (a) Las líneas de acción de las reacciones en los dos soportes de rodillo
se intersecan en P, y la fuerza F ejerce un momento respecto a P. Esta barra está
impropiamente soportada.
Barra (b) Las líneas de acción de las reacciones se intersecan en A y la fuerza F
ejerce un momento respecto a A. Esta barra también está impropiamente soportada.
Barra (c) Las tres fuerzas de soporte no son ni paralelas ni concurrentes. Esta
barra está soportada en forma adecuada. Las ecuaciones de equilibrio son
Fx Ax B 0,
Fy Ay F 0,
Mpunto A BL FL 0.
Al resolver estas ecuaciones, las reacciones son Ax F, Ay F y B F.
B
P
B
Las líneas
de acción de
las reacciones
se intersecan.
Las líneas
de acción de
las reacciones
se intersecan.
y
B
y
A
A
F
(a)
A
B
B
Ax
A
B
F
x
x
Ax
Ay
Ay
(b)
Razonamiento crítico
Una parte esencial del aprendizaje de la mecánica es desarrollar su intuición acerca
del comportamiento de los sistemas físicos que se estudian. En este ejemplo, piense
en los efectos de las cargas sobre los tres sistemas y vea si puede predecir si están
soportados en forma adecuada. ¿Las cargas causarán que las barras se mueven o no?
Luego vea si su juicio se confirma por el análisis dado en el ejemplo.
F
(c)
221
222
Capítulo 5 Objetos en equilibrio
Problemas
5.69 a) Dibuje el diagrama de cuerpo libre de la viga de la
figura y demuestre que ésta es estáticamente indeterminada (vea
el ejemplo activo 5.5).
b) Determine tantas reacciones como le sea posible.
5.75 Indique si cada una de las barras en L mostradas está
soportada en forma adecuada o impropia. Si una barra está adecuadamente soportada, determine las reacciones en sus soportes
(vea el ejemplo activo 5.6).
5.70 Escoja soportes en A y B tales que la viga no sea estáticamente indeterminada. Determine las reacciones en los soportes.
20 N-m
A
F
300 mm
Problemas 5.69/5.70
B
A
B
L
L
(1)
(2)
5.71 a) Dibuje el diagrama de cuerpo libre de la viga y demuestre
que es estáticamente indeterminada (el par externo M0 se conoce).
b) Mediante un análisis de la deflexión de la viga, se determina que
la reacción vertical B ejercida por el soporte de rodillos se relaciona
con el par M0 por B 2M0L. ¿Cuáles son las reacciones en A?
1
L
2
1
L
2
F
A
B
L
45°
45
C
45°
5.72 Elija soportes en A y B de manera que la viga no sea estáticamente indeterminada. Encuentre las reacciones en los soportes.
1
L
2
1
L
2
F
L
B
A
800 mm
C
(3)
Problema 5.75
M0
A
B
L
Problemas 5.71/5.72
5.76 Indique si cada una de las barras en L mostradas está
soportada de manera adecuada o impropia. Si cualquiera de las
barras está adecuadamente soportada, determine las reacciones
en sus soportes (vea el ejemplo activo 5.6).
5.73 Dibuje el diagrama de cuerpo libre del tubo en forma de
L de la figura y demuestre que es estáticamente indeterminado.
Determine tantas reacciones como le sea posible.
Estrategia: Coloque el sistema coordenado de modo que el
eje x pase por los puntos A y B.
5.74 Elija los soportes en A y B de la figura de modo que el tubo
no sea estáticamente indeterminado. Determine las reacciones en
los soportes.
C
1
L
2
1
L
2
F
A
B
A
B
L
L
45
(1)
(2)
C
1
L
2
1
L
2
B
80 N
F
A
100 N-m
300 mm
A
B
L
300 mm
700 mm
Problemas 5.73/5.74
1
L
2
1
L
2
F
(3)
Problema 5.76
5.3 Aplicaciones tridimensionales
5.3 Aplicaciones tridimensionales
ANTECEDENTES
Se ha visto que cuando un cuerpo en equilibrio está sometido a un sistema bidimensional de fuerzas y momentos, no se pueden obtener más de tres ecuaciones
independientes de equilibrio. En el caso de un sistema tridimensional de fuerzas y
momentos, se pueden obtener hasta seis ecuaciones independientes de equilibrio.
Las tres componentes de la suma de las fuerzas deben ser iguales a cero y las tres
componentes de la suma de los momentos respecto a cualquier punto deben también ser iguales a cero. El procedimiento para determinar las reacciones sobre
cuerpos sometidos a sistemas tridimensionales de fuerzas y momentos —dibujar
el diagrama de cuerpo libre y aplicar las ecuaciones de equilibrio— es el mismo
que para el de dos dimensiones.
Ecuaciones de equilibrio escalares
Cuando un objeto está en equilibrio, el sistema de fuerzas y pares que actúa sobre
dicho objeto satisface las ecuaciones (5.1) y (5.2). La suma de las fuerzas es cero
y la suma de los momentos respecto a cualquier punto es igual a cero. Al expresar
estas ecuaciones en términos de componentes cartesianas en tres dimensiones produce las seis ecuaciones de equilibrio escalares.
©Fx
©Fy
©Fz
©Mx
©My
©Mz
=
=
=
=
=
=
0,
0,
0,
0,
0,
0.
(5.9)
(5.10)
(5.11)
(5.12)
(5.13)
(5.14)
Las sumas de los momentos pueden evaluarse respecto a cualquier punto. Aunque
se pueden obtener más ecuaciones sumando momentos respecto a otros puntos,
éstas no serían independientes de las seis ecuaciones iniciales. No se pueden obtener más de seis ecuaciones de equilibrio independientes a partir de un diagrama
de cuerpo libre dado; entonces, pueden determinarse cuando mucho seis fuerzas
o pares desconocidos.
Los pasos requeridos para determinar reacciones en tres dimensiones resultan
familiares por las aplicaciones bidimensionales que se han analizado. Primero obtenga un diagrama de cuerpo libre aislando un objeto y mostrando las cargas y reacciones que actúan sobre éste, después use las ecuaciones (5.9)-(5.14) para determinar
las reacciones.
Soportes
Se presentan cinco convenciones que suelen utilizarse en problemas tridimensionales. De nuevo, aun cuando los soportes reales no se parezcan físicamente a esos
modelos, se representarán mediante los modelos si éstos ejercen las mismas (o
aproximadamente las mismas) reacciones.
Soporte de bola y cuenca En el soporte de bola y cuenca, el cuerpo soportado está unido a una bola encerrada dentro de una cuenca esférica (figura 5.13a).
La cuenca permite que la bola gire libremente (se ignora la fricción) pero impide
que se traslade en cualquier dirección.
Imagine que usted sostiene una barra unida a un soporte de bola y cuenca (figura 5.13b). Si trata de trasladar la barra (moverla sin girarla) en cualquier dirección,
el soporte ejercerá una fuerza reactiva que impedirá el movimiento. Sin embargo,
223
224
Capítulo 5 Objetos en equilibrio
y
Ay
(a)
x
Ax
Az
z
(c)
(b)
Figura 5.13
(a) Soporte de bola y cuenca.
(b) Sujeción de una barra soportada.
(c) El soporte de bola y cuenca puede generar tres componentes de fuerza.
Cuenca
Bola
Fémur
Pelvis
Figura 5.14
El fémur humano está unido a la pelvis por
medio de un soporte de bola y cuenca.
usted puede girar la barra respecto al soporte. El soporte no puede generar un par
para evitar la rotación. El soporte de bola y cuenca no puede entonces ejercer
un par pero sí tres componentes de fuerza (figura 5.13c). Es el modelo tridimensional análogo al soporte de pasador bidimensional.
La rótula de la cadera humana es un ejemplo de soporte de bola y cuenca (figura 5.14). El soporte de la palanca de velocidades de un auto se puede modelar como
soporte de bola y cuenca en el intervalo de su movimiento.
Soporte de rodillo El soporte de rodillo (figura 5.15a) es un soporte de bola y
cuenca que puede rodar sobre una superficie de apoyo. Un soporte de rodillo puede
ejercer sólo una fuerza normal a la superficie de apoyo (figura 5.15b). Las ruedas
que se usan en ocasiones para soportar las patas de los muebles son soportes de este
tipo.
Articulación El soporte de articulación (bisagra) es el que se utiliza comúnmente para soportar puertas. Permite que el cuerpo soportado gire respecto a
una línea o eje de la articulación. Un cuerpo unido a una articulación se muestra en la figura 5.16a. El eje z del sistema coordenado está alineado con el eje
de la articulación.
Si se imagina sujetando una barra unida a una articulación (figura 5.16b),
observe que se puede hacer girar la barra alrededor del eje de la articulación.
Ésta no puede generar un par respecto a su eje (el eje z) para impedir la rotación.
y
A
x
z
(a)
Figura 5.15
(a) Soporte de rodillo.
(b) La reacción es normal a la superficie de soporte.
(b)
5.3 Aplicaciones tridimensionales
y
y
Articulación
A
A
Cuerpo
soportado
x
x
z
z
(b)
(a)
y
y
y
Ay
Ay
Ay
MAy
MAx
Ax
Ax
x
Az
z
z
(c)
Ax
x
Az
x
z
(d)
Figura 5.16
(a) Articulación. El eje z está alineado con el eje de la articulación.
(b) Sujeción de una barra soportada.
(c) En general, una articulación puede generar cinco reacciones:
tres componentes de fuerza y dos pares.
(d) Las reacciones cuando la articulación no genera pares.
(e) Las reacciones cuando la articulación no genera pares ni una
fuerza paralela al eje de ésta.
Sin embargo, no se puede hacer girar la barra respecto a los ejes x o y porque la
articulación puede generar pares respecto a esos ejes para impedir el movimiento. Además, no se puede trasladar la barra en ninguna dirección. En la figura
5.16c se muestran las reacciones que una articulación puede generar sobre un
objeto. Hay tres componentes de fuerza, Ax , Ay y Az , y pares respecto a los ejes
x e y, MAx y MAy .
En algunas situaciones una articulación no genera pares sobre el objeto que
soporta o éstos son suficientemente pequeños para ignorarse. Un ejemplo del último caso es cuando las articulaciones que soportan una puerta están apropiadamente alineadas. Aquí la articulación genera sólo fuerzas sobre el cuerpo (figura
5.16d). Se presentan también casos en que una articulación no genera pares sobre
el cuerpo ni fuerza en la dirección de su eje (la articulación puede de hecho estar
diseñada para que no soporte una fuerza paralela a su eje). La articulación genera
entonces reacciones sólo en las direcciones perpendiculares a su eje (figura 5.16e).
En los ejemplos y en los problemas se indicará cuándo una articulación no genere
las cinco reacciones mostradas en la figura 5.16c.
Cojinete El tipo de cojinete mostrado en la figura 5.17a soporta una flecha
circular que puede girar alrededor de su eje. Las reacciones son idénticas a las
generadas por una articulación. En el caso más general (figura 5.17b), el cojinete puede generar tanto una fuerza sobre la flecha soportada en cada dirección
coordenada, como pares respecto a ejes perpendiculares a la flecha, pero no un
par respecto al eje de la flecha.
Como en el caso de la articulación, puede haber casos en que el cojinete no
genere pares (figura 5.17c) o no genere ni pares ni fuerza paralela al eje de la
flecha (figura 5.17d). Algunos cojinetes están diseñados así para aplicaciones
(e)
225
226
Capítulo 5 Objetos en equilibrio
y
y
Ay
MAy
Cojinete
Flecha
MAx
Ax
x
x
Az
z
z
(a)
(b)
y
y
Ay
Ay
Ax
Ax
x
x
Az
z
z
(d)
(c)
Figura 5.17
(a) Cojinete. El eje z está alineado con el eje de la flecha.
(b) En general, un cojinete puede generar cinco reacciones: tres componentes de
fuerza y dos componentes de par.
(c) Reacciones cuando el cojinete no genera pares.
(d) Reacciones cuando el cojinete no genera pares ni una fuerza paralela al eje de
la flecha.
específicas. En los ejemplos y problemas se indicará cuándo un cojinete no
ejerce todas las reacciones mostradas en la figura 5.17b.
Soporte fijo Ya se ha estudiado el soporte fijo, o empotrado, (figura 5.18a).
Imagine que sujeta una barra con un soporte fijo (figura 5.18b); no puede trasladarla en ninguna dirección ni hacerla girar respecto a algún eje. El soporte es capaz
Cuerpo
soportado
y
y
y
Ay
MAy
x
Ax
x
MAx
z
z
(a)
z
Az
MAz
(b)
Figura 5.18
(a) Soporte fijo.
(b) Sujeción de una barra soportada.
(c) Un soporte fijo puede ejercer seis reacciones: tres componentes de fuerza y tres componentes de par.
(c)
x
5.3 Aplicaciones tridimensionales
de ejercer fuerzas Ax , A y y A z en cada dirección coordenada, así como pares MAx,
MAy y MAz respecto a cada eje coordenado (figura 5.18c).
En la tabla 5.2 se resumen las convenciones de soportes usados comúnmente
en las aplicaciones tridimensionales.
Tabla 5.2
Soportes usados en aplicaciones tridimensionales.
Soportes
Reacciones
T
Cuerda o cable
Una fuerza colineal
y
y
A
x
z
x
z
Contacto con una superficie lisa
Una fuerza normal
y
y
Ay
x
x
Az
Ax
z
z
Contacto con una superficie rugosa
Tres componentes de fuerza
y
y
Ay
x
z
x
Az
Ax
z
Soporte de bola y cuenca
Tres componentes de fuerza
y
y
A
x
z
Soporte de rodillos
x
z
Una fuerza normal
227
228
Capítulo 5 Objetos en equilibrio
Tabla 5.2
continuación
Soportes
Reacciones
y
y
Ay
MAy
x
x
Ax
MAx
Az
z
Tres componentes de fuerza,
Dos componentes de par
z
Articulación
(El eje z es paralelo al eje
de la articulación)
y
Ay
x
Az
y
Ax
z
(Cuando no se ejercen pares)
y
x
Ay
z
x
Cojinete
(El eje z es paralelo al eje
de la flecha soportada)
Ax
z
(Cuando no se generan pares
ni fuerza axial)
y
y
Ay
MAy
x
z
Soporte fijo (empotrado)
x
MAz
Az
MAx
Ax
z
Tres componentes de fuerza,
tres componentes de par
5.3 Aplicaciones tridimensionales
RESULTADOS
Ecuaciones de equilibrio
Si un objeto está en equilibrio, la suma de las fuerzas externas que actúan sobre él
es igual a cero.
F 0
Fx 0,
(5.9)
Fy 0,
(5.10)
Fz 0,
(5.11)
y la suma de los momentos respecto a cualquier punto debidos a las fuerzas y pares
que actúan sobre éste es igual a cero.
Mcualquier punto 0
Mx 0,
(5.12)
My 0,
(5.13)
Mz 0.
(5.14)
Soportes
y
y
Ay
x
x
Az
Ax
z
z
Soporte de bola y cuenca
Tres componentes de fuerza
y
y
A
Ejemplos de soportes usados en
aplicaciones tridimensionales
(vea la tabla 5.2).
x
x
z
z
Soporte de rodillo
Una fuerza normal
y
y
Ay
MAy
x
z
Soporte fijo (empotrado)
x
MAz
Az
MAx
Ax
z
Tres componentes de fuerza,
tres componentes de par
229
230
Capítulo 5 Objetos en equilibrio
Ejemplo activo 5.7
Determinación de las reacciones en tres dimensiones ( Relacionado con
el problema 5.86)
La barra AB de la figura está soportada por los cables BC y BD y por un soporte de
bola y cuenca en A. El cable BC es paralelo al eje z y el cable BD es paralelo al eje x.
La fuerza de 200 N actúa en el punto medio de la barra. Determine el valor de las
tensiones en los cables y las reacciones en A.
y
400
mm
1000 mm
C
B
D
600 mm
600
mm
A
x
200j (N)
z
Estrategia
Se debe obtener el diagrama de cuerpo libre de la barra aislándola y mostrando las
reacciones ejercidas por los cables y el soporte de bola y cuenca. Luego pueden
aplicarse las ecuaciones de equilibrio para determinar las reacciones.
Solución
Dibujo del diagrama de cuerpo libre de la barra
Fuerzas ejercidas
por los cables
y
TBD
TBC
B
Aísle la barra y muestre las reacciones
ejercidas por los cables y el soporte de
bola y cuenca.
Ay
A
Az
z
Ax
x
200j (N)
Reacciones debidas al
soporte de bola y cuenca
Aplicación de las ecuaciones de equilibrio
Fx Ax TBD 0,
Fy Ay 200 N 0,
Fz Az TBC 0.
Las sumas de las fuerzas en cada dirección coordenada son iguales a cero.
5.3 Aplicaciones tridimensionales
Mpunto A [rAB (TBCk)] [rAB (TBDi)] i
1
j
k
0.6
0.4
0 TBC
0
12 r
AB
i
j
k
1
0.6
0.4 0.5
TBD 0
i
(200j)
j
k
0.3
0.2
0 200
0
0
(0.6TBC 40)i (TBC 0.4TBD)j (0.6TBD 100)k.
Las componentes de este vector (las sumas de los momentos
respecto a los tres ejes coordenados) deben ser iguales a cero.
Mx (0.6 m)TBC 40 N-m 0,
My (1 m)TBC (0.4 m)TBD 0,
Mz (0.6 m)TBD 100 N-m 0.
Al resolver las seis ecuaciones de equilibrio escalares se obtiene
Ax 166.7 N, Ay 200 N, Az 66.7 N, TBC 66.7 N,
y TBD 166.7 N.
Problema de práctica Suponga que los cables BC y BD se remueven y que la
unión de bola y cuenca en A se remplaza por un soporte fijo. Determine las reacciones en A.
y
B
(1000, 600, 400) mm
A
x
200j (N)
z
Respuesta: Ax 0, Ay 200 N, Az 0, MAx 40 N-m, MAy 0, MAz 100 N-m.
La suma de los
momentos respecto
a cualquier punto es
igual a cero.
231
232
Capítulo 5 Objetos en equilibrio
Ejemplo 5.8
Reacciones en un soporte de articulación ( Relacionado con el problema 5.104)
y
D
(2, 2, 1) pies
x
A
30
B
z
C
100j (lb)
La barra AC tiene 4 pies de largo y la soportan una articulación en A y el cable
BD. El eje de la articulación corre a lo largo del eje z. La línea central de la barra
está en el plano x–y, y el punto B de conexión del cable es el punto medio de la
barra. Determine la tensión en el cable y las reacciones generadas en la barra por
la articulación.
Estrategia
Se obtendrá un diagrama de cuerpo libre de la barra AC aislándola del cable y la
articulación (las reacciones que la articulación puede ejercer sobre la barra se
muestran en la tabla 5.2). Después se pueden determinar las reacciones aplicando
las ecuaciones de equilibrio.
Solución
Dibujo del diagrama de cuerpo libre Se aísla la barra del soporte de articulación y del cable y se muestran las reacciones que ejercen (figura a). Los términos Ax, Ay y Az son las componentes de fuerza generadas por la articulación y
los términos MAx y MAy son los pares ejercidos por la articulación respecto a los
ejes x e y (recuerde que la articulación no puede generar un par sobre la barra respecto al eje de la articulación). El término T es la tensión en el cable.
Reacciones
debidas a la
articulación
y
Ay
Fuerza ejercida
por el cable BD
MAy
MAx
Ax
T
x
A
Az
B
z
C
100j (lb)
(a) Diagrama de cuerpo libre de la barra.
Aplicación de las ecuaciones de equilibrio Para escribir las ecuaciones de equilibrio, primero se debe expresar la fuerza en el cable en términos de sus componentes. Las coordenadas del punto B son (2 cos 30°, 2 sen 30°, 0) pie, de manera
que el vector de posición de B a D es
rBD (2 2 cos 30°)i [2 (2 sen 30°)]j (1 0)k
0.268i 3j k (pie).
Este vector se divide entre su magnitud para obtener un vector unitario eBD que
apunta del punto B al punto D:
eBD =
rBD
ƒ rBD ƒ
= 0.084i + 0.945j - 0.315k.
Ahora es posible escribir la fuerza del cable como el producto de su magnitud y eBD:
TeBD = T10.084i + 0.945j - 0.315k2.
Las sumas de las fuerzas en cada dirección coordenada deben ser iguales a cero:
©Fx = A x + 0.084T = 0,
©Fy = A y + 0.945T - 100 lb = 0,
©Fz = A z - 0.315T = 0.
(1)
5.3 Aplicaciones tridimensionales
Si se suman momentos respecto a A, las ecuaciones resultantes no contienen las
reacciones desconocidas Ax, Ay y Az. Los vectores de posición de A a B y de A
a C son
rAB 2 cos 30°i 2 sen 30°j (pie),
rAC 4 cos 30°i 4 sen 30°j (pie).
La suma de los momentos respecto a A, con fuerzas en lb y distancias en pie, es
Mpunto A MAx i MAy j [rAB (TeBD)] [rAC (100j)]
i
= MAx i + MAy j + 3 1.732
0.084T
i
3
+ 3.464
0
j
-2
-100
j
-1
0.945T
k
3
0
- 0.315T
k
03
0
= 1MAx + 0.315T2i + 1MAy + 0.546T2j
+ 11.72T - 3462k = 0.
A partir de esta ecuación vectorial se obtienen las ecuaciones escalares
Mx MAx (0.315 pie)T 0,
My MAy (0.546 pie)T 0,
Mz (1.72 pie)TBD 346 pies-lb 0.
Al resolver estas ecuaciones se obtienen las reacciones
T 201 lb,
MAx 63.4 pies-lb,
MAy 109.8 pies-lb.
Después, de las ecuaciones (1) se obtienen las fuerzas ejercidas por la articulación
sobre la barra:
Ax 17.0 lb,
Ay 90.2 lb,
Az 63.4 lb.
Razonamiento crítico
Observe en la tabla 5.2 que existen tres posibilidades para las reacciones ejercidas por una articulación o cojinete. ¿Cómo se sabe cuál elegir? Bajo ciertas circunstancias, una articulación puede no ejercer pares significativos sobre el objeto con el que está conectado, y también puede no ejercer una fuerza significativa
en la dirección del eje de la articulación. Por ejemplo, cuando un objeto tiene dos
soportes de articulación y sus ejes están alineados (vea el ejemplo 5.9), con frecuencia puede suponerse que cada articulación individual no ejerce pares sobre el
objeto. Pero en general, se requiere experiencia para hacer ese tipo de juicios. En
los ejemplos y problemas siguientes se indicarán las reacciones que pueden suponerse son ejercidas por una articulación. Siempre que tenga duda, debe suponer
que una articulación puede ejercer el conjunto de reacciones más general que se
muestra en la tabla 5.2 (tres componentes de fuerza y dos componentes de par).
233
234
Capítulo 5 Objetos en equilibrio
Ejemplo 5.9
Reacciones en articulaciones alineadas en forma apropiada ( Relacionado con el
problema 5.112)
y
La placa de la figura está soportada por bisagras en A y B y por el cable CE. Las bisagras, alineadas en forma apropiada, no generan pares sobre la placa, y la bisagra
en A no genera una fuerza sobre la placa en la dirección del eje de la bisagra. Determine las reacciones en las bisagras y la tensión en el cable.
100
mm
E
B
80 mm
A
Estrategia
Se dibujará el diagrama de cuerpo libre de la placa usando la información dada respecto a las reacciones ejercidas por las bisagras en A y B. Antes de poder aplicar las
ecuaciones de equilibrio, es necesario expresar la fuerza ejercida sobre la placa por
el cable en términos de sus componentes.
z
C
200 mm
200 mm
D
x
400j (N)
Solución
Dibujo del diagrama de cuerpo libre Se aísla la placa y se muestran las reacciones en las bisagras y la fuerza ejercida por el cable (figura a). El término T es la
fuerza ejercida sobre la placa por el cable CE.
Aplicación de las ecuaciones de equilibrio Como se conocen las coordenadas
de los puntos C y E, se puede expresar la fuerza en el cable como el producto de
su magnitud T y un vector unitario dirigido desde C hacia E. El resultado es
T(0.842i 0.337j 0.421k).
Las sumas de las fuerzas en cada dirección coordenada deben ser iguales a cero:
y
©Fx = Ax + Bx - 0.842T = 0,
©Fy = Ay + By + 0.337T - 400 = 0,
©Fz = Bz + 0.421T = 0.
Reacciones
debidas
a la bisagra B
Racciones
debidas a la
bisagra A.
No ejerce
Ay
fuerza
axial.
A
Ax
z
By
Bz
B
Bx
T
(1)
Fuerza
Si se suman los momentos respecto a B, las ecuaciones resultantes no contendrán
ejercida las tres reacciones desconocidas en B. La suma de los momentos respecto a B, con
por el
fuerzas en N y distancias en m, es
cable CE
C
©M punto
point B
D
400j (N)
(a) Diagrama de cuerpo libre de la placa.
x
= 3
i
0.2
-0.842T
i
3
+ 0.2
0
j
0
0.337T
j
0
-400
k
i
3
3
0
+ 0
0.421T
Ax
j
0
Ay
k
0.2 3
0
k
0.2 3
0
= 1- 0.2Ay + 802i + 1- 0.0842T + 0.2Ax2j
+ 10.0674T - 802k = 0.
Las ecuaciones escalares son
©Mx = - 10.2 m2Ay + 80 N-m = 0,
©My = - 10.0842 m2T + 10.2 m2Ax = 0,
©Mz = 10.0674 m2T - 80 N-m = 0.
Al resolver estas ecuaciones se obtienen las reacciones
T = 1187 N,
Ax = 500 N,
Ay = 400 N.
Luego, a partir de las ecuaciones (1), las reacciones en B son
Bx = 500 N,
By = - 400 N,
Bz = - 500 N.
Problemas
235
Razonamiento crítico
“Articulaciones alineadas en forma apropiada” significa articulaciones montadas
sobre un objeto de manera que sus ejes queden alineados. En casos tales, como el
de este ejemplo, generalmente puede suponerse que ninguna articulación individual ejerce pares sobre el objeto. Observe que también se supone en este ejemplo
que la articulación en A no ejerce reacción paralela al eje de la articulación, pero
la bisagra en B sí lo hace. Las articulaciones pueden diseñarse intencionalmente
para que se dé este caso, o puede resultar de la forma en que están instaladas.
Si el único objetivo hubiese sido determinar la tensión T, se podría haber
logrado con facilidad evaluando la suma de los momentos respecto a la línea AB
(el eje z). Como las reacciones en las articulaciones no ejercen momento respecto
al eje z, se obtendría la ecuación
(0.2 m)(0.337T) ⫺ (0.2 m)(400 N) ⫽ 0,
que da como resultado T ⫽ 1187 N.
Problemas
5.77 La barra AB tiene un soporte fijo en A cargada por las
fuerzas
5.78 La barra AB de la figura tiene un soporte fijo en A. La tensión
en el cable BC es de 8 kN. Determine las reacciones en A.
y
FB = 2i + 6j + 3k 1kN2,
FC = i - 2j + 2k 1kN2.
A
a) Dibuje el diagrama de cuerpo libre de la barra.
b) Determine las reacciones en A.
Estrategia: a) Dibuje un diagrama de la barra aislada de su
soporte. Complete el diagrama de cuerpo libre de la barra agregando las dos fuerzas externas y las reacciones debidas al soporte
fijo (vea la tabla 5.2). Use las ecuaciones de equilibrio escalares
(5.9)-(5.14) para determinar las reacciones.
z
C
2m
(3, 0.5, ⫺0.5) m
B
x
Problema 5.78
5.79 La barra AB de la figura tiene un soporte empotrado en A.
El collar en B está fijo a la barra. La tensión en la cuerda BC es de
300 lb. a) Dibuje el diagrama de cuerpo libre de la barra y b) determine las reacciones en A.
y
A
5.80 La barra AB de la figura tiene un soporte empotrado en A. El
collar en B está fijo a la barra. Suponga que no se desea que el soporte en A esté sujeto a un par de magnitud mayor a 3000 pies-lb.
¿Cuál es la tensión máxima permisible en la cuerda BC?
FB
z
B
1m
1m
y
C
B (6, 6, 2) pies
FC
x
Problema 5.77
A
x
C (8, 0, 3) pies
z
Problemas 5.79/5.80
236
Capítulo 5 Objetos en equilibrio
5.81 La fuerza total sobre el señalamiento de carretera que se
muestra en la figura, ejercida por su peso y los vientos más severos
que se anticipan es F 2.8i 1.8j (kN). Determine las reacciones
en el soporte fijo.
5.83 La tensión en el cable AB que se muestra en la figura es
de 24 kN. Determine las reacciones en el soporte fijo D.
y
2m
C
y
A
F
2m
8m
x
D
1m
B
3m
z
O
8m
x
z
Problema 5.81
5.82 La tensión en el cable AB que se muestra en la figura es
de 800 lb. Determine las reacciones en el soporte fijo C.
y
Problema 5.83
5.84 El operador robótico mostrado está en reposo y el eje y
es vertical. Los pesos de los brazos AB y BC actúan en sus puntos
medios. Los cosenos directores de la línea central del brazo AB
son: cos ux 0.174, cos uy 0.985, cos uz 0, y los cosenos
directores de la línea central del brazo BC son: cos ux 0.743,
cos uy 0.557, cos uz 0.371. El soporte en A se comporta
como un soporte fijo.
a) ¿Qué valor tiene la suma de los momentos respecto a A debido
a los pesos de los dos brazos?
b) ¿Qué valor tienen las reacciones en A?
4 pies
C
m
y
0m
5 pies
4 pies
C
60
A
B
160 N
600 mm
x
F
B
z
(6, 0, 4) pies
200 N
Problema 5.82
A
z
x
Problema 5.84
237
Problemas
5.85 La fuerza ejercida sobre la manija del aparato para hacer
ejercicio que se muestra en la figura es F 260i 130j (N).
¿Qué valor tienen las reacciones en el soporte fijo en O?
5.90 La carga suspendida que se muestra en la figura ejerce una
fuerza F 600 lb en A y la barra OA pesa 200 lb. Suponga que el
peso de la barra actúa en su punto medio. Determine las tensiones
en los cables y las reacciones en el soporte de bola y cuenca en O.
150 mm
y
5.89 La carga suspendida que se muestra en la figura ejerce una
fuerza F 600 lb en A, y el peso de la barra OA es insignificante.
Determine las tensiones en los cables y las reacciones en el soporte
de bola y cuenca O.
y
C
(0, 6, 10) pies
F
O
200 mm
z
A
(8, 6, 0) pies
B
250 mm
(0, 10, 4) pies
x
F j
Problema 5.85
5.86 En el ejemplo activo 5.7, suponga que el cable BD se
alarga y que el punto de unión D se mueve de (0, 600, 400) mm a
(0, 600, 600) mm (el extremo B de la barra AB permanece donde
estaba). Trace un bosquejo de la barra y sus soportes mostrando el
cable BD en su nueva posición. Dibuje el diagrama de cuerpo libre
de la barra y aplique el equilibrio para determinar las tensiones en
los cables y las reacciones en A.
5.87 La fuerza F, que actúa en C sobre el aguilón ABC mostrado en la figura, apunta en la dirección del vector unitario
0.512i 0.384j 0.768k y su magnitud es de 8 kN. El aguilón
tiene un soporte de bola y cuenca en A y también está soportado
por los cables BD y BE. El collar B está fijo al aguilón.
a) Dibuje el diagrama de cuerpo libre del aguilón.
b) Determine las tensiones en los cables y las reacciones en A.
5.88 Cada uno de los cables BD y BE en el problema 5.87 soportará con seguridad una tensión de 25 kN. Con base en este criterio,
¿cuál es la magnitud máxima aceptable de la fuerza F?
x
O
z
Problemas 5.89/5.90
5.91 El avión de 158,000 kg que se muestra en la figura está
en reposo sobre el piso (z 0 es el nivel del piso). Su tren de
aterrizaje está apoyado en los puntos A, B y C. Las coordenadas
del punto G donde actúa el peso son (3, 0.5, 5) m. ¿Qué valor
tienen las reacciones normales ejercidas por el piso sobre el tren
de aterrizaje del avión?
y
21 m
1.5 m
2m
6m
B
D
E
G
1m
2m
C
6m
A
B
z
2m
y
C
2m
x
F
Problemas 5.87/5.88
Problema 5.91
A
x
238
Capítulo 5 Objetos en equilibrio
5.92 La placa triangular horizontal que se muestra en la figura
está suspendida por los tres cables verticales A, B y C. La tensión
en cada cable es de 80 N. Determine las coordenadas x y z del
punto donde el peso de la placa actúa de manera efectiva.
5.96 En la figura se muestra la fuerza vertical F 4 kN y la
distancia b 0.15 m. Si las reacciones ejercidas en A y B se
representan con una sola fuerza equivalente, ¿qué valor tiene la
fuerza y en qué punto interseca su línea de acción el plano x–z?
y
A
B
C
0.3 m
0.4 m
5.95 La barra en L de la figura está soportada por un cojinete
en A y descansa sobre una superficie horizontal en B. La fuerza
vertical F 4 kN y la distancia b 0.15 m. Determine las
reacciones en A y B.
(x, 0, z)
x
5.97 En la figura se muestra la fuerza vertical F 4 kN. El
cojinete en A soportará con seguridad una fuerza de 2.5 kN y un
par de 0.5 kN-m de magnitud. Con base en esos criterios, ¿cuál
es el intervalo permisible para la distancia b?
z
y
Problema 5.92
5.93 La sección de pared horizontal de 800 kg que se muestra
en la figura está soportada por los tres cables verticales A, B y C.
¿Qué valores tienen las tensiones en los cables?
F
b
A
x
B
0.2 m
B
0.3 m
z
7m
C
A
7m
Problemas 5.95–5.97
7m
6m
4m
5.98 La barra de 1.1 m de longitud que se muestra en la figura
está soportada en A por un soporte de bola y cuenca y las dos paredes son lisas. La tensión en el cable vertical CD es de 1 kN.
a) Dibuje el diagrama de cuerpo libre de la barra.
b) Determine las reacciones en A y B.
8m
mg
Problema 5.93
5.94 La barra AC que se muestra en la figura está soportada por
el cable BD y un cojinete en A que puede girar respecto al eje z.
La persona ejerce una fuerza F 10j (lb) en C. Determine la
tensión en el cable y las reacciones en A.
y
B
400 mm
y
D
C
x
A
A
x
B
8 pulg
C
14 pulg
z
D
(18, 8, 7) pulg
Problema 5.94
z
700 mm
Problema 5.98
600 mm
Problemas
5.99 La barra de 8 pies de longitud que se muestra está sostenida
por un soporte de bola y cuenca en A, por el cable BD y por un soporte de rodillo en C. El collar en B es el punto medio de la barra.
La fuerza F 50k (lb). Determine la tensión en el cable BD y
las reacciones en A y C.
239
5.103 La armadura espacial que se muestra en la figura tiene
soportes de rodillo en B, C y D y está sujeto a una fuerza vertical
F 20 kN en A. ¿Qué valor tienen las reacciones en los soportes
de rodillo?
y
5.100 La barra que se muestra tiene 8 pies de longitud. La fuerza
F Fy j 50k (lb). ¿Cuál es el valor máximo de Fy para el cual
el soporte de rodillo en C permanecerá en el suelo?
F
A (4, 3, 4) m
B
D (6, 0, 0) m
y
x
A
z
C (5, 0, 6) m
3 pies
B
z
Problema 5.103
F
5.104 En el ejemplo 5.8, suponga que el cable BD se alarga
y el punto de unión B se mueve al extremo de la barra en C.
Las posiciones del punto de unión D y de la barra no cambian.
Trace un bosquejo de la barra mostrando el cable BD en su
nueva posición. Dibuje el diagrama de cuerpo libre de la barra
y aplique el equilibrio para determinar la tensión en el cable y
las reacciones en A.
D
4 pies
2 pies
C
x
Problemas 5.99/5.100
5.101 La torre de la figura tiene 70 m de altura. La tensión en
cada cable es de 2 kN. Considere la base de la torre A como un
soporte fijo. ¿Qué valores tienen las reacciones en A?
5.105 La puerta de 40 lb está soportada por bisagras en A y B.
El eje y es vertical. Las bisagras no generan pares sobre la puerta
y la bisagra en B no genera una fuerza paralela al eje de la bisagra.
El peso de la puerta actúa en su punto medio. ¿Qué valor tienen
las reacciones en A y B?
5.102 La torre de la figura tiene 70 m de altura. Si la tensión en
el cable BC es de 2 kN, ¿cuáles deben ser las tensiones en BD y BE
para que el par generado sobre la torre por el soporte fijo en A sea
igual a cero? ¿Qué valor tienen las reacciones resultantes en A?
y
4 pies
1 pie
y
B
B
5 pies
C
1 pie
A
40 m
x
40
50 m
E
A
z
40 m
Problema 5.105
D
z
20 m
50 m
Problemas 5.101/5.102
x
240
Capítulo 5 Objetos en equilibrio
5.106 El cable vertical que se muestra en la figura está conectado en A. Determine la tensión en el cable y las reacciones en
el cojinete B debido a la fuerza F 10i 30j 10k (N).
5.107 Suponga que la componente z de la fuerza F es igual a
cero, pero en otro caso F es desconocida. Si el par ejercido sobre
el eje por el cojinete en B es MB 6j 6k N-m, ¿Qué valores
tienen la fuerza F y la tensión en el cable?
5.110 Considere el lanzador de cohetes descrito en el problema
5.109. Los cojinetes en A y B no ejercen pares, y el cojinete B no
ejerce ninguna fuerza en la dirección x. Determine las reacciones
en A y B.
y
y
W
200 mm
A
E
B
D
x
100 mm
3 pies 3 pies
100 mm
B
200 mm
Problemas 5.109/5.110
F
z
5.111 El cable CD de la grúa de la figura está unido a un
objeto en reposo en D. La grúa está soportada por los cojinetes
E y F y el cable horizontal AB. La tensión en el cable AB es de
8 kN. Determine la tensión en el cable CD.
x
A
Problemas 5.106/5.107
5.108 El dispositivo del problema 5.106 está mal diseñado
porque los pares que deben ser soportados por el cojinete en B
ocasionan que éste se “amarre” (imagine que trata de abrir una
puerta soportada por una sola bisagra). En el diseño mejorado
que se muestra enseguida, los cojinetes en B y C no soportan
pares y el cojinete en C no genera una fuerza en la dirección x. Si
la fuerza F 10i 30j 10k (N), ¿qué valor tienen la tensión
en el cable vertical y las reacciones en los cojinetes B y C?
Estrategia: Como las reacciones ejercidas sobre la grúa por
los cojinetes no generan momentos respecto al eje z, la suma
de los momentos respecto a este eje, debidos a las fuerzas
ejercidas sobre la grúa por los cables AB y CD, es igual a cero.
y
C
A
B
y
200 mm
z
2m
50 mm
200 mm
B
F
E
50 mm
100 mm
2m
D
3m
y
C
x
C
F
z
x
A
A
B
6m
Problema 5.108
4m
5.109 El lanzador de cohetes está soportado por el gato hidráulico DE y los cojinetes A y B. Dichos cojinetes están sobre el
eje x y soportan árboles paralelos a él. El cilindro hidráulico DE
ejerce una fuerza sobre el lanzador que apunta a lo largo de la línea
de D a E. Las coordenadas de D son (7, 0, 7) pies y las de E son
(9, 6, 4) pies. El peso W 30 kip actúa en el punto (4.5, 5, 2) pies.
¿Cuál es la magnitud de la reacción sobre el lanzador en E?
D
3m
3m
Problema 5.111
x
241
Problemas
5.112 En el ejemplo 5.9, suponga que el cable CE se acorta y
su punto de unión E se mueve al punto (0, 80, 0) mm. La placa
permanece en la misma posición. Trace un bosquejo de la placa y
sus soportes donde muestre la nueva posición del cable CE. Dibuje
el diagrama de cuerpo libre de la placa y aplique el equilibrio para
determinar las reacciones en las bisagras y la tensión en el cable.
5.117 Los cojinetes en A, B y C no ejercen pares sobre la barra
que se muestra en la figura, ni fuerzas en la dirección del eje de
dicha barra. Determine las reacciones en los cojinetes debido a las
dos fuerzas que actúan sobre la barra.
y
200i (N)
5.113 La placa de la figura está soportada por bisagras en A y
B y por el cable CE, y está cargada por una fuerza en D. El
borde de la placa al cual están unidas las bisagras se encuentra
en el plano y–z, y los ejes de las bisagras son paralelos a la línea
que pasa por los puntos A y B. Las bisagras no ejercen pares
sobre la placa. ¿Qué valor tiene la tensión en el cable CE?
300 mm
x
C
180 mm
B
z
5.114 En el problema 5.113, la bisagra en B no ejerce una fuerza
sobre la placa en la dirección del eje de la bisagra. ¿Qué valores
tienen las magnitudes de las fuerzas ejercidas sobre la placa por
las bisagras en A y B?
150 mm
A
100k (N)
150 mm
Problema 5.117
y
3m
E
2i 6j (kN)
A
D
2m
1m
B
z
x
C
20
2m
5.118 El soporte que conecta el mástil del bote de vela de la figura a la cubierta se comporta como un soporte de bola y cuenca.
La cuerda que une la pértiga (la vela) a la parte superior del mástil
ejerce una fuerza de 200 lb sobre éste. La fuerza está en un plano
horizontal a 15° del eje central del bote (vista superior). La pértiga
de la vela ejerce una fuerza de 50 lb sobre el mástil en P. Esta
fuerza se ubica en un plano horizontal a 45° del eje del bote (observe la vista superior). El mástil está soportado por los cables AB
y ACD (los cables AE y AFG están flojos y sus tensiones se pueden ignorar). Determine las tensiones en los cables AB y CD y las
reacciones en la base del mástil.
y
A
A
Problemas 5.113/5.114
Vela
50 pies
5.115 La barra ABC de la figura está sostenida por soportes de
bola y cuenca en A y C y por el cable BD. La masa suspendida es
de 1800 kg. Determine la tensión en el cable.
C
C
F
5.116* En el problema 5.115, suponga que el soporte de bola y
cuenca en A está diseñado para que no ejerza fuerza paralela a la
línea recta de A a C. Determine las reacciones en A y C.
P
P
6 pies
(2, 2, 1) m
x
y
E
B
D
G
D
D
2m
Vista lateral
Vista posterior
B
A
C
x
4m
z
x
Problemas 5.115/5.116
15 pies
21 pies
4m
Vista superior
200 lb
15
E
45
z (La vela no se muestra)
F
G
A
B
P
C
50 lb
D
Problema 5.118
242
Capítulo 5 Objetos en equilibrio
y
5.119* La barra AC está soportada por el cable BD y un cojinete
en A que puede girar respecto al eje AE. La persona ejerce una
fuerza F 50j (N) en C. Determine la tensión en el cable.
(0.3, 0.5, 0) m
Estrategia: Use el hecho de que la suma de los momentos
respecto al eje AE debidos a las fuerzas que actúan sobre el
diagrama de cuerpo libre de la barra debe ser igual a cero.
E
C
(0.82, 0.60, 0.40) m
5.120* En el problema 5.119, determine las reacciones en el
cojinete A.
A
(0.3, 0.4, 0.3) m
B (0.46, 0.46, 0.33) m
x
Estrategia: Escriba el par ejercido sobre el diagrama de cuerpo
libre de la barra por el cojinete como MA MAxi MAy j MAzk.
Entonces, además de las ecuaciones de equilibrio, obtenga una
ecuación estableciendo que la componente de MA paralela al
eje AE sea igual a cero.
z
D
(0.7, 0, 0.5) m
Problemas 5.119/5.120
5.4 Elementos sometidos a dos y tres fuerzas
ANTECEDENTES
Se ha mostrado cómo se usan las ecuaciones de equilibrio para analizar objetos
soportados y cargados de diferentes maneras. Aquí se analizarán dos casos particulares que ocurren con tanta frecuencia que es necesario prestarles una atención
especial. El primer tipo, el elemento sometido a dos fuerzas, es especialmente
importante, y en el capítulo 6 tiene un papel central en el análisis de estructuras.
Elementos de dos fuerzas
Si el sistema de fuerzas y momentos que actúa sobre un objeto equivale a dos
fuerzas actuando en puntos diferentes, el cuerpo es un elemento de dos fuerzas. Por
ejemplo, el objeto de la figura 5.19a está sometido a dos conjuntos de fuerzas
concurrentes cuyas líneas de acción se intersecan en A y B. Como es posible
representarlas con fuerzas únicas que actúan en A y B (figura 5.19b), donde
F F1 F2 ⴢ ⴢ ⴢ FN y F F1 F 2 ⴢ ⴢ ⴢ F N, este objeto es un elemento de dos fuerzas.
F1
F
F2
1
B
F
A
F3
B
F
F
FN
Figura 5.19
(a) Objeto sometido a dos conjuntos de
fuerzas concurrentes.
(b) Representación de las fuerzas concurrentes
mediante dos fuerzas F y F .
(c) Si el cuerpo está en equilibrio, las fuerzas
deben ser iguales y opuestas.
(d) Las fuerzas forman un par a menos que
tengan la misma línea de acción.
F
2
A
M
(a)
(b)
ⴚF
B
ⴚF
F
B
A
A
F
(c)
(d)
5.4 Elementos sometidos a dos y tres fuerzas
B
B
243
B
T
T
A
Figura 5.20
(a) Cable unido en A y en B.
(b) El cable es un elemento de dos
fuerzas.
(c) Fuerzas ejercidas por el cable.
T
A
A
T
(a)
(b)
(c)
Si el cuerpo está en equilibrio, ¿qué puede inferirse acerca de las fuerzas F y
F ? La suma de las fuerzas es igual a cero sólo si F F (figura 5.19c). Además,
las fuerzas F y F forman un par, por lo que la suma de los momentos no es cero
a menos que las líneas de acción de las fuerzas se encuentren a lo largo de la línea
que pasa por los puntos A y B (figura 5.19d). Por lo tanto, la condición de equilibrio indica que las dos fuerzas son iguales en magnitud y opuestas en dirección, y
que tienen la misma línea de acción. No obstante, sin información adicional no es
posible determinar su magnitud.
Un cable unido en dos puntos (figura 5.20a) es un ejemplo común de un elemento de dos fuerzas (figura 5.20b). El cable ejerce fuerzas sobre los puntos de
conexión, las cuales están dirigidas a lo largo de la línea entre ellos (figura 5.20c).
Una barra que tiene dos soportes que ejercen sólo fuerzas sobre ella (ningún
momento), y que no está sometida a ninguna carga intermedia, es un elemento
de dos fuerzas (figura 5.21a). Tales barras suelen usarse como soportes para
otros objetos. Como la barra es un elemento de dos fuerzas, las líneas de acción
de las fuerzas ejercidas sobre la barra deben coincidir con la línea entre los
soportes (figura 5.21b). Observe que, a diferencia de un cable, la barra puede
ejercer fuerzas en A y B en las direcciones mostradas en la figura 5.21c o en las
direcciones opuestas (en otras palabras, el cable sólo puede jalar sus soportes,
mientras que la barra puede jalarlos o empujarlos).
En estos ejemplos se ha supuesto que los pesos del cable y de la barra se
pueden ignorar en comparación con las fuerzas ejercidas sobre ellos por sus
soportes. Cuando no se da este caso, resulta claro que no son elementos de dos
fuerzas.
B
B
B
T
T
A
A
A
T
T
(a)
(b)
Figura 5.21
(a) La barra AB conecta el objeto al soporte de pasador.
(b) La barra AB es un elemento de dos fuerzas.
(c) Fuerza ejercida sobre el objeto soportado por la barra AB.
(c)
244
Capítulo 5 Objetos en equilibrio
F3
Elementos de tres fuerzas
Si el sistema de fuerzas y momentos que actúan sobre un objeto equivale a tres
fuerzas actuando en puntos diferentes es un elemento de tres fuerzas. Es posible
demostrar que si un elemento de tres fuerzas está en equilibrio, las fuerzas son
coplanares y además paralelas o concurrentes.
Se demostrará primero que las fuerzas son coplanares. Considere que éstas
son F1, F2 y F3; sea P el plano que contiene los tres puntos de aplicación (figura
5.22a). Sea L la línea que pasa por los puntos de aplicación de F1 y F2. Como los
momentos debidos a F1 y F2 respecto a L son iguales a cero, el momento debido
a F3 respecto a L debe también ser igual a cero (figura 5.22b):
F2
F1
P
(a)
F3
[e ⴢ (r F3)]e [F3 ⴢ (e r)]e 0.
F2
F1
r
L
e
P
(b)
F3
F1
F2
Q
(c)
Figura 5.22
(a) Las tres fuerzas y el plano P.
(b) Determinación del momento debido
a F3 respecto a L.
(c) Si las fuerzas no son paralelas, éstas
deben ser concurrentes.
Esta ecuación requiere que F3 sea perpendicular a e r, de modo que F3 está contenida en P. El mismo procedimiento puede usarse para mostrar que F1 y F2 están
contenidas en P, así que las fuerzas son coplanares (la demostración es diferente
si los puntos de aplicación están sobre una línea recta, pero el resultado es el
mismo).
Si las tres fuerzas coplanares no son paralelas, habrá puntos en que sus líneas
de acción se intersequen. Suponga que las líneas de acción de dos de las fuerzas se
intersecan en un punto Q. Entonces los momentos de esas dos fuerzas respecto a Q
son iguales a cero y la suma de los momentos respecto a Q también es cero sólo si
la línea de acción de la tercera fuerza pasa por Q. Por lo tanto, las fuerzas son paralelas o bien son concurrentes (figura 5.22c).
Con frecuencia, el análisis de un objeto en equilibrio puede simplificarse
reconociendo si es un elemento de dos o tres fuerzas. Sin embargo, al hacer esto
no se obtiene algo a cambio de nada. Una vez que se ha dibujado el diagrama de
cuerpo libre de un elemento de dos fuerzas, como se muestra en las figuras 5.20b
y 5.21b, no puede obtenerse más información a partir de las ecuaciones de equilibrio. Y cuando se requiere que las líneas de acción de fuerzas no paralelas que
actúan sobre un elemento de tres fuerzas sean coincidentes, se ha usado el hecho
de que la suma de los momentos respecto a un punto debe ser cero y no puede
obtenerse más información a partir de esta condición.
RESULTADOS
Elemento de dos fuerzas
Si un objeto en equilibrio está sometido a
dos fuerzas que actúan en puntos diferentes y
ninguna otra fuerza o par, se denomina
elemento de dos fuerzas. El equilibrio
requiere que las dos fuerzas sean iguales y
opuestas entre sí, y paralelas a la línea
entre los dos puntos.
Elemento de tres fuerzas
Si un objeto en equilibrio está sometido a
tres fuerzas que actúan en puntos diferentes
y ninguna otra fuerza o par, se denomina
elemento de tres fuerzas. El equilibrio
requiere que las tres fuerzas sean coplanares
y ya sea paralelas o concurrentes.
ⴚF
B
A
F
5.4 Elementos sometidos a dos y tres fuerzas
Ejemplo activo 5.10
Elementos de dos y tres fuerzas ( Relacionado con el problema 5.121)
El peso de 100 lb de la placa rectangular que se muestra en la figura actúa en su punto
medio. Ignore el peso del eslabón AB. Determine las reacciones ejercidas sobre la
placa en B y en C.
45°
A
C
B
4 pies
Estrategia
La placa está sometida a su peso y a las reacciones ejercidas por los soportes de
pasador en B y en C, por lo que es un elemento de tres fuerzas. El pasador BC es
un elemento de dos fuerzas, por lo que la línea de acción de la reacción que ejerce
sobre la placa en B está dirigida a lo largo de la línea de A a B. Se puede usar esta
información para simplificar el diagrama de cuerpo libre de la placa.
La reacción ejercida sobre la placa mediante el elemento de dos fuerzas AB
debe dirigirse a lo largo de la línea entre A y B.
Solución
y
La fuerza ejercida sobre la placa por la barra AB
debe estar dirigida a lo largo de la línea entre
A y B, y la línea de acción del peso de la placa
es vertical, por lo que las tres fuerzas que
actúan sobre la placa no son paralelas. Por lo
tanto deben ser concurrentes.
P
x
45
B
100 lb
C
Fx B sen45 C sen45 0,
Fy B cos45 C cos45 100 lb 0.
Aplique las ecuaciones de equilibrio
Se obtienen las reacciones B C 70.7 lb.
Problema de práctica Suponga que la placa se reemplaza con una placa de 100 lb
cuyo espesor (la dimensión perpendicular a la página) no es uniforme. La línea de acción
del peso de la placa no uniforme es 3 pies a la derecha del punto B. Determine las reacciones ejercidas sobre la placa en B y C.
Respuesta: B 35.4 lb, C 79.1 lb.
245
246
Capítulo 5 Objetos en equilibrio
Un elemento de dos fuerzas ( Relacionado con el problema 5.122)
Ejemplo 5.11
6 kN
a
B
400 mm
A
700 mm
La barra en L de la figura tiene un soporte de pasador en A y una carga de 6 kN en
B. El peso de la barra se puede ignorar. Determine el ángulo a y las reacciones en A.
Estrategia
La barra es un elemento de dos fuerzas, ya que está sometida sólo a la fuerza de
6 kN en B y a la fuerza ejercida por el soporte de pasador (si no se pudiera ignorar
el peso de la barra, ésta no sería un elemento de dos fuerzas). Se determinará de
dos maneras el ángulo a y las reacciones en A, primero aplicando las ecuaciones
de equilibrio y luego aprovechando el hecho de que la barra es un elemento de dos
fuerzas.
Solución
Aplicación de las ecuaciones de equilibrio Se dibuja el diagrama de cuerpo libre
de la barra de la figura a, mostrando las reacciones en el soporte de pasador. Sumando
momentos respecto al punto A, las ecuaciones de equilibrio son
y
B
6 kN
Fx Ax 6 cos a kN 0,
a
Fy Ay 6 sen a kN 0,
Mpunto A (0.7 m)(6 sen a kN) (0.4 m)(6 cos a kN) 0.
A
x
Ax
Ay
A partir de la tercera ecuación se ve que a arctan(0.40.7). En el intervalo 0 a
360°, esta ecuación tiene dos soluciones a 29.7° y a 209.7°. Conociendo
a, se puede determinar Ax y Ay de las dos primeras ecuaciones de equilibrio. Las
soluciones para los dos valores de a son
(a) Diagrama de cuerpo libre de la barra.
a 29.7°,
Ax 5.21 kN,
a 209.7°,
Ax 5.21 kN,
Ay 2.98 kN,
y
y
6 kN
A
x
6 kN
(b)
a
y
6 kN
Ay 2.98 kN.
a
B
Tratamiento de la barra como elemento de dos fuerzas Se sabe que la fuerza
de 6 kN en B y la fuerza ejercida por el soporte de pasador deben ser iguales en
magnitud, opuestas en dirección y dirigidas a lo largo de la línea que pasa por A y
B. En las figuras b y c se muestran las dos posibilidades. Reconociendo entonces que
la barra es un elemento de dos fuerzas, se conocen de inmediato las posibles direcciones de las fuerzas y la magnitud de la reacción en A.
En la figura b se puede ver que tan a 0.4/0.7, por lo que a 29.7° y las
componentes de la reacción en A son
Ax 6 cos 29.7° kN 5.21 kN,
B
Ay 6 sen 29.7° kN 2.98 kN.
6 kN
A
x
(c)
(b), (c) Posibles direcciones de las fuerzas.
En la figura c, a 180° 29.7° 209.7°, y las componentes de la reacción en
A son
Ax 6 cos 29.7° kN 5.21 kN
Ay 6 sen 29.7° kN 2.98 kN.
Razonamiento crítico
¿Por qué resulta valioso reconocer que un objeto es un elemento de dos fuerzas?
Al hacerlo se conocen las direcciones de las fuerzas que actúan sobre el objeto y
también se sabe que las fuerzas son iguales y opuestas. Como lo demuestra este
objeto, dicha información frecuentemente simplifica la solución de un problema.
Problemas
247
Problemas
5.121 En el ejemplo activo 5.10, suponga que el soporte en
A se mueve de manera que el ángulo entre la barra AB y la vertical decrece de 45° a 30°. La posición de la placa rectangular
no cambia. Dibuje el diagrama de cuerpo libre de la placa
donde muestre el punto P en que las líneas de acción de las tres
fuerzas que actúan sobre la placa se intersecan. Determine las
magnitudes de las reacciones sobre la placa en B y C.
5.124 En la figura, el peso W 50 lb actúa en el centro del
disco. Use el hecho de que el disco es un elemento de tres fuerzas
para determinar la tensión en el cable y la magnitud de la reacción
en el soporte de pasador.
60
5.122 La magnitud de la reacción ejercida sobre el punto B de
la barra en L es de 60 lb (consulte el ejemplo 5.11).
a) ¿Cuál es la magnitud de la reacción ejercida sobre la barra por
el soporte en A?
b) ¿Qué valores tienen las componentes x y y de la reacción
ejercida sobre la barra por el soporte en A?
W
Problema 5.124
y
14 pulg
B
5.125 El peso W 40 N actúa en el centro del disco mostrado.
Las superficies son rugosas. ¿Qué fuerza F es necesaria para
levantar el disco del suelo?
17 pulg
F
A
150 mm
x
W
Problema 5.122
5.123 En la figura, la carga suspendida es de 1000 lb. Si se
desprecia su peso, la estructura es un elemento de tres fuerzas.
Use este hecho para determinar las magnitudes de las reacciones
en A y B.
50 mm
Problema 5.125
5.126 Use el hecho de que la barra horizontal mostrada es un
elemento de tres fuerzas para determinar el ángulo a y las magnitudes de las reacciones en A y B. Suponga que 0 a 90°.
A
5 pies
2m
a
B
3 kN
60 B
A
1m
10 pies
Problema 5.126
Problema 5.123
30
248
Capítulo 5 Objetos en equilibrio
5.127 La carga suspendida pesa 600 lb. Use el hecho de que el
elemento ABC es de tres fuerzas para determinar las magnitudes
de las reacciones en A y B.
3 pies
B
4.5 pies
5.129 El pistón hidráulico que se muestra en la figura ejerce
una fuerza horizontal en B para soportar el peso W ⫽ 1500 lb de
la cubeta de la excavadora. Determine la magnitud de la fuerza
que debe ejercer el pistón hidráulico (la suma vectorial de las
fuerzas ejercidas en B por el pistón hidráulico, el elemento de
dos fuerzas AB y el elemento de dos fuerzas BD, debe ser igual
a cero).
30⬚
Pistón
hidráulico
14 pulg
C
45⬚
12 pulg
B
A
16 pulg
A
4 pulg
C
D
Problema 5.127
Cubeta
5.128 a) ¿Es la barra en L mostrada un elemento de tres fuerzas?
b) Determine las magnitudes de las reacciones en A y B.
c) ¿Son concurrentes las tres fuerzas que actúan sobre la barra
en L?
W
8
pulg
2 kN
3 kN-m
B
Problema 5.129
300 mm
150 mm
700 mm
5.130 El elemento ACG de la cargadora frontal que se muestra
en la figura está sujeto a una carga W ⫽ 2 kN y está sostenido
mediante un soporte de pasador en A y el cilindro hidráulico BC.
Trate al cilindro hidráulico como un elemento de dos fuerzas.
a) Dibuje los diagramas de cuerpo libre del cilindro hidráulico y
el elemento ACG.
b) Determine las reacciones sobre el elemento ACG.
5.131 En el problema 5.130, determine las reacciones sobre el
elemento ACG usando el hecho de que es un elemento de tres
fuerzas.
A
250
mm
8
pulg
500 mm
A
Problema 5.128
0.75 m
B
C
1m
G
0.5 m
W
1.5 m
1.5 m
Problemas 5.130/5.131
Problemas de repaso
5.132 Una placa rectangular está sometida a dos fuerzas, A y B
(figura a). En la figura b, las dos fuerzas están separadas en sus
componentes. Escribiendo las ecuaciones de equilibrio en función
de las componentes Ax, Ay, Bx y By, demuestre que las dos fuerzas
A y B son iguales en magnitud y opuestas en dirección, y están dirigidas a lo largo de la línea que pasa por sus puntos de aplicación.
249
5.133 Un objeto en equilibrio está sometido a tres fuerzas
cuyos puntos de aplicación se encuentran sobre una línea recta.
Demuestre que las fuerzas son coplanares.
F2
B
F3
B
A
F1
h
Problema 5.133
A
b
(a)
y
By
Bx
B
h
Ay
A
Ax
x
b
(b)
Problema 5.132
Problemas de repaso
5.134 El cable suspendido que se muestra en la figura pesa 12 lb.
a) Dibuje el diagrama de cuerpo libre del cable (las tensiones en
el cable en A y B no son iguales).
5.135 Determine las reacciones en el soporte fijo que se muestra
en la figura.
b) Determine las tensiones en el cable en A y B.
4 kN
c) ¿Cuál es la tensión en el cable en su punto más bajo?
3m
A
20 kN-m
B
2 kN
50
5m
A
3m
Problema 5.135
32
Problema 5.134
3 kN
250
Capítulo 5 Objetos en equilibrio
5.136 a) Dibuje el diagrama de cuerpo libre de la placa de 50 lb
y explique por qué es estáticamente indeterminada.
b) Determine tantas reacciones en A y B como sea posible.
y
5.140 El ingeniero que diseña el mecanismo de liberación
mostrado desea que la fuerza normal ejercida en C sea de 120 N.
Si la longitud sin elongar del resorte es de 30 mm, ¿cuál es el
valor necesario de la constante k del resorte?
A
12 pulg
8 pulg
5.139 La constante del resorte mostrado es k 9600 N/m y la
longitud sin elongar del resorte es 30 mm. Trate al perno en A
como un soporte de pasador y suponga que la superficie en C es
lisa. Determine las reacciones en A y la fuerza normal en C.
B
x
20 pulg
A
50 lb
24 mm
Problema 5.136
B
5.137 La masa del camión mostrado es de 4000 kg. Sus ruedas
están bloqueadas y la tensión en su cable es T 10 kN.
30 mm
a) Dibuje el diagrama de cuerpo libre del camión.
15 mm
k
C
30
b) Determine las fuerzas normales ejercidas por el camino sobre
las ruedas del camión en A y B.
30 mm
30
T
50 mm
Problemas 5.139/5.140
3m
B
A
2m
2.5 m
2.2 m
5.141 La armadura mostrada soporta un objeto suspendido de
90 kg. ¿Qué valor tienen las reacciones en los soportes A y B?
mg
Problema 5.137
5.138 En la figura, suponga que la fuerza ejercida por el martillo
sobre la cabeza del clavo es vertical e ignore el peso del martillo.
400 mm
700 mm
a) Dibuje el diagrama de cuerpo libre del martillo.
b) Si F 10 lb, ¿qué valor tienen la fuerza ejercida por el martillo sobre el clavo y las fuerzas normal y de fricción ejercidas por
el martillo sobre el piso?
F
11 pulg
65
2 pulg
Problema 5.138
300 mm
B
A
Problema 5.141
Problemas de repaso
251
5.142 El remolque de la figura está en una pendiente de 15°. Sus ruedas pueden girar. La conexión en H se comporta como un soporte
de pasador. Determine las reacciones en A y H.
y
1.4
pies
x
H
870 lb
1.6 pies
8 pies
A
2.8 pies
15°
Problema 5.142
5.143 Para determinar la posición del punto en que actúa el peso
del automóvil mostrado (el centro de masa o centro de gravedad),
un ingeniero coloca el automóvil sobre básculas y mide las reacciones normales en las ruedas para dos valores de a, obteniendo
los siguientes resultados.
a
Ay (kN)
B (kN)
10°
20°
10.134
10.150
4.357
3.677
5.144 La barra de la figura está conectada mediante soportes de
pasador a los collarines que se deslizan sobre las dos barras fijas.
Su masa es de 10 kg, tiene 1 m de longitud y su peso actúa en su
punto medio. Ignore la fricción y las masas de los collarines. El
resorte está sin elongar cuando la barra es vertical (a 0), y la
constante del resorte es k 100 N/m. Determine los valores de a
en el rango 0 a 60° para los cuales la barra se encuentra en
equilibrio.
¿Qué valor tienen las distancias b y h?
k
y
h
B
W
Ax
a
Ay
x
a
b
2.7 m
Problema 5.144
Problema 5.143
252
Capítulo 5 Objetos en equilibrio
5.145 Con cada uno de los dispositivos mostrados se puede soportar una carga R aplicando una fuerza F. Estos dispositivos se
denominan palancas de primera, segunda y tercera clases.
a) La razón RF se llama ventaja mecánica. Determine la ventaja
mecánica de cada palanca.
b) Determine la magnitud de la reacción en A para cada palanca
(exprese sus respuestas en términos de F.)
R
F
5.147 La masa de 20 kg que se muestra en la figura está suspendida por los cables unidos a tres postes verticales de 2 m.
El punto A está en (0, 1.2, 0) m. Determine las reacciones en el
soporte fijo en E.
5.148 En el problema 5.147, el soporte fijo de cada poste vertical soportará con seguridad un par con magnitud de 800 N-m.
Con base en este criterio, ¿cuál es máximo valor seguro de la
masa suspendida?
F
R
y
C
A
A
B
D
A
L
L
L
Palanca de primera clase
L
Palanca de segunda clase
1m
F
R
1m
E
A
2m
0.3 m
z
L
x
Problemas 5.147/148
L
Palanca de tercera clase
Problema 5.145
5.146 La fuerza ejercida por el peso de la placa rectangular mostrada es de 800 N. El peso de la placa actúa en su punto medio. Si
las reacciones ejercidas sobre la placa por los tres cables se representan con una sola fuerza equivalente, ¿qué valor tiene la fuerza
y en qué punto interseca su línea de acción a la placa?
5.149 La barra de 80 lb está sostenida por un soporte de bola y
cuenca en A, por la pared lisa sobre la que se apoya y por el cable
BC. El peso de la barra actúa en su punto medio.
a) Dibuje el diagrama de cuerpo libre de la barra.
b) Determine la tensión en el cable BC y las reacciones en A.
y
5 pies
3 pies
B
A
C
4 pies
C
B
3 pies
3 pies
2m
0.5 m
z
Problema 5.149
1m
Problema 5.146
x
A
5.150 La barra horizontal de peso W está sostenida por un soporte de rodillos en A y por el cable BC. Use el hecho de que la barra
es un elemento de tres fuerzas para determinar el ángulo a, la tensión en el cable y la magnitud de la reacción en A.
C
A
B
W
L/2
L/2
Problema 5.150
a
Problemas de repaso
253
Proyecto de diseño 1 La carretilla tradicional mostrada está
Proyecto de diseño 3 La plataforma de un camión de volteo
diseñada para transportar una carga W mientras está soportada
por una fuerza ascendente F aplicada por el usuario sobre las
manijas. a) Use la estática para analizar los efectos del rango de
elecciones de las dimensiones a y b sobre el tamaño de la carga
que podría acarrearse. Asimismo considere las implicaciones
de estas dimensiones sobre la facilidad y practicidad de uso de
la carretilla. b) Sugiera un diseño diferente para este diseño
clásico que logre realizar la misma función. Use la estática para
comparar su diseño de carretilla respecto a su capacidad de
carga y facilidad de uso.
(figura a) se eleva mediante dos cilindros hidráulicos de tándem
AB (figura b). La masa de la plataforma del camión y su carga
es de 16,000 kg y su peso actúa en el punto G (suponga que la
posición del punto G relativo a la plataforma no cambia cuando
se levanta la plataforma).
F
W
a
a) Dibuje una gráfica de la magnitud de la fuerza total que los
cilindros hidráulicos deben ejercer para soportar la plataforma
en reposo para valores del ángulo a desde cero hasta 30°.
b) Considere otras opciones para las ubicaciones de los puntos
de unión A y B que parezcan ser factibles e investigue cómo
afectan sus elecciones a la magnitud de la fuerza total que los
cilindros hidráulicos deben ejercer cuando a varía desde cero
hasta 30°. Asimismo compare los costos de sus elecciones de
los puntos de unión con las opciones mostradas en la figura a,
suponiendo que el costo de los cilindros hidráulicos es proporcional al producto de la fuerza máxima que deben ejercer
cuando a varía de cero a 30° y su longitud cuando a 30°.
c) Escriba un reporte breve donde presente sus investigaciones y haga una recomendación para la ubicación de los
puntos A y B.
b
G
Proyecto de diseño 2 En la figura se muestra un ejemplo
de los populares dispositivos llamados “móviles”, los cuales
fueron introducidos como una forma de arte por el artista estadounidense Alexander Calder (1898-1976). Suponga que usted
desea diseñar un móvil que represente el sistema solar y ha
elegido esferas de colores para representar los planetas. Las
masas de las esferas que representan a Mercurio, Venus, Tierra,
Marte, Júpiter, Saturno, Urano, Neptuno y Plutón son de 10 g,
25 g, 25 g, 10 g, 50 g, 40 g, 40 g, 40 g, 10 g. Suponga que las
barras y cuerdas que utiliza son de masa insignificante. Diseñe
el móvil de manera que los planetas estén en su orden correcto
en relación con el Sol. Escriba un reporte breve que incluya
un dibujo de su diseño y el análisis que demuestre que su
móvil está balanceado.
B
A
0.5 m
C
0.3 m
0.9 m
1.2 m
1.8 m
2.4 m
(a)
G
A
a
B
C
(b)
CAPÍTULO
6
Estructuras en equilibrio
En ingeniería, el término estructura se puede referir a cualquier
objeto que tenga la capacidad de soportar y ejercer cargas. En
este capítulo se considerarán estructuras compuestas de partes
interconectadas o elementos. Para diseñar una estructura de este
tipo, o para determinar si una existente es adecuada, se deben
determinar las fuerzas y los pares que actúan sobre ella en su
totalidad así como en sus elementos individuales. Se demostrará
primero cómo llevar a cabo este análisis en las estructuras
llamadas armaduras, las cuales están compuestas enteramente
de elementos de dos fuerzas. Las estructuras comunes fabricadas con elementos de acero que soportan algunos puentes en
carreteras son armaduras. Luego se considerarán otras estructuras, llamadas bastidores si están diseñadas para permanecer
estacionarias y soportar cargas, y máquinas si están diseñadas
para moverse y ejercer cargas.
Los ingenieros neolíticos que construyeron Stonehenge establecieron un
ejemplo para el diseño de estructuras resistentes. En este capítulo se describen
técnicas para determinar las fuerzas y pares que actúan sobre los elementos
individuales de las estructuras.
256
Capítulo 6 Estructuras en equilibrio
6.1 Armaduras
ANTECEDENTES
Figura 6.1
Una casa típica está soportada por armaduras
hechas de madera.
F
La naturaleza de las armaduras, como las vigas que soportan una casa de madera
(figura 6.1), puede explicarse iniciando con ejemplos muy sencillos. Suponga que
los extremos de tres barras se conectan con pasadores para formar un triángulo. Si
se agregan soportes, como se muestra en la figura 6.2a, se obtiene una estructura
que soportará una carga F. Es posible construir estructuras más elaboradas agregando más triángulos (figuras 6.2b y c). Las barras son los elementos de esas
estructuras y los lugares en que las barras se unen entre sí son las juntas de la armadura. Aunque estos ejemplos son muy sencillos, en la figura 6.2c se puede ver que
la llamada armadura Warren comienza a parecerse a las estructuras usadas para
soportar puentes y techos de casas (figura 6.3). Si las estructuras están soportadas
y cargadas en sus juntas y los pesos de las barras se ignoran, cada una de éstas es
un elemento de dos fuerzas. Tales estructuras se denominan armaduras.
En la figura 6.4a se dibuja el diagrama de cuerpo libre de un elemento de una
armadura. Como es un elemento de dos fuerzas, las fuerzas en los extremos, que
son las sumas de las fuerzas ejercidas sobre el elemento en sus juntas, deben ser
iguales en magnitud, opuestas en dirección y dirigidas a lo largo de la línea entre
las juntas. Se llama T a la fuerza axial en el elemento. Cuando T es positiva en la
dirección mostrada (es decir, cuando las fuerzas se alejan una de otra), el elemento está trabajando a tensión. Cuando las fuerzas se acercan entre sí, el elemento
está a compresión.
En la figura 6.4b se “corta” el elemento con un plano y se dibuja el diagrama
de cuerpo libre de la parte ubicada a un lado del plano. El sistema de fuerzas y
momentos internos ejercidos por la parte no incluida en el diagrama se representa
mediante una fuerza F que actúa en el punto P donde el plano interseca al eje del
F
F
F
(a)
(b)
(c)
Figura 6.2
Fabricación de estructuras al unir barras mediante pasadores para formar triángulos.
Armadura de puente Howe
Armadura de puente Pratt
Armadura de techo Howe
Armadura de techo Pratt
Figura 6.3
Ejemplos sencillos de estructuras para puentes y techos (las líneas
representan elementos y los círculos representan juntas).
6.1 Armaduras
T
T
F
P
T
T
T
(a)
(b)
T
M
T
(c)
Figura 6.4
(a) Cada elemento de una armadura es un miembro de dos fuerzas.
(b) Obtención del diagrama de cuerpo libre de una parte del elemento.
(c) La fuerza interna es igual y opuesta a la fuerza que actúa en la
junta, y el par interno es igual a cero.
elemento y un par M. La suma de los momentos respecto a P debe ser igual a cero,
de modo que M 0. Por lo tanto se tiene un elemento de dos fuerzas, lo cual significa que F debe ser igual en magnitud y opuesta en dirección a la fuerza T que
actúa en la junta (figura 6.4c). La fuerza interna es una tensión o compresión igual
a la ejercida en la junta. Observe el parecido con una cuerda o un cable, en el cual la
fuerza interna es una tensión igual a la tensión aplicada en los extremos.
Aunque muchas estructuras reales, incluidas las “armaduras de techo” y las
“armaduras de puente”, consisten en barras conectadas en los extremos, muy pocas
de ellas tienen juntas articuladas con pasadores. Por ejemplo, en la figura 6.5 se
muestra la junta de una armadura de puente. Los extremos de los elementos están
soldados en la junta y no tienen la capacidad de girar. Resulta claro que una junta
como ésta puede ejercer pares sobre los elementos. ¿Por qué las estructuras de este
tipo se llaman armaduras?
La razón es que están diseñadas para funcionar como tales, lo que implica
soportar cargas sometiendo sus elementos a cargas axiales. Por lo general se pueden modelar como armaduras tratando sus juntas como conexiones articuladas
bajo el supuesto de que los pares ejercidos por las juntas sobre los elementos son
pequeños en comparación con las fuerzas axiales. Cuando en los problemas se
hace referencia a las estructuras con juntas remachadas como armaduras, se pretende decir que éstas pueden representarse como armaduras.
Figura 6.5
Junta de la armadura de un puente.
257
258
Capítulo 6 Estructuras en equilibrio
RESULTADOS
F
Armaduras
Las estructuras que consisten en barras rectas articuladas con pasadores en los extremos y están soportadas y cargadas sólo en las juntas donde están conectados los elementos se llaman armaduras. Se supone
que los pesos de los elementos son insignificantes
en comparación con las cargas aplicadas.
F
F
F
Diagrama de cuerpo libre de
un elemento individual
Como cada elemento de una armadura es
un miembro de dos fuerzas, éste se encuentra sometido sólo a cargas axiales iguales y
opuestas. La fuerza T se denomina fuerza
axial en un elemento. Cuando T es positiva en la dirección mostrada (es decir, cuando las fuerzas están dirigidas alejándose
una de la otra), el elemento está en tensión
(T). Cuando las fuerzas están dirigidas
apuntándose entre sí, el elemento está en
compresión (C).
T
T
F
6.2 Método de las juntas
ANTECEDENTES
El método de las juntas implica dibujar diagramas de cuerpo libre de las juntas de
una armadura, una por una, y usar las ecuaciones de equilibrio para determinar las
fuerzas axiales en las barras. Por lo general, antes de comenzar se debe dibujar un
diagrama de toda la armadura (es decir, tratar a la armadura como un solo objeto)
y calcular las reacciones en sus soportes. Por ejemplo, considere la armadura
Warren de la figura 6.6a; ésta tiene elementos de 2 m de longitud y soporta cargas
6.2 Método de las juntas
400 N
400 N
800 N
D
B
y
800 N
D
B
A
Ax
E
A
259
C
2m
x
Ay
C
400 N
E
800 N
D
B
1m
(a)
2m
1m
(b)
Figura 6.6
(a) Armadura Warren que soporta dos cargas.
(b) Diagrama de cuerpo libre de la armadura.
A
E
C
500 N
700 N
en B y D. En la figura 6.6b se dibuja su diagrama de cuerpo libre. A partir de las
ecuaciones de equilibrio,
兺Fx Ax 0,
y
兺Fy Ay E 400 N 800 N 0,
兺Mpunto A (1 m)(400 N) (3 m)(800 N) (4 m)E 0,
TAB
ese obtienen las reacciones Ax 0, Ay 500 N y E 700 N.
El siguiente paso es elegir una junta y dibujar su diagrama de cuerpo libre. En
la figura 6.7a se aísla la junta A cortando los elementos AB y AC. Los términos TAB
y TAC son las fuerzas axiales en los elementos AB y AC, respectivamente. Aunque
las direcciones de las flechas que representan las fuerzas axiales desconocidas se
pueden escoger de manera arbitraria, observe que se han elegido de manera que un
elemento estará a tensión si se obtiene un valor positivo para la fuerza axial. Al
escoger consistentemente las direcciones de esta manera ayudará a evitar errores.
Las ecuaciones de equilibrio para la junta A son
60
A
TAC
x
500 N
(a)
577 N
B
兺Fx TAC TAB cos 60° 0,
兺Fy TAB sen 60° 500 N 0.
Resolviendo estas ecuaciones se obtienen las fuerzas axiales TAB 577 N
y TAC 289 N. El elemento AB está a compresión y la barra AC a tensión (figura
6.7b).
Aunque, para la junta de la figura 6.7a, se usó una figura realista a fin de
visualizar mejor el diagrama de cuerpo libre, es posible usar una figura sencilla
con sólo las fuerzas que actúan sobre la junta (figura 6.7c).
Enseguida se obtiene un diagrama de la junta B cortando los elementos AB,
BC y BD (figura 6.8a). A partir de las ecuaciones de equilibrio para la junta B,
Ese obtiene TBC 115 N y TBD 346 N. El elemento BC está a tensión y el elemento BD a compresión (figura 6.8b). Si se continúa con el dibujo de diagramas
de cuerpo libre de las juntas, es posible determinar las fuerzas axiales en todos los
elementos.
En dos dimensiones sólo pueden obtenerse dos ecuaciones de equilibrio
independientes de los diagramas de cuerpo libre de una junta. Al sumar los
momentos respecto a un punto no se obtiene una ecuación independiente adicional porque las fuerzas son concurrentes. Por lo tanto, al aplicar el método de
las juntas se deben escoger juntas sometidas a fuerzas conocidas y con no más
de dos fuerzas desconocidas. En el presente ejemplo se analizará primero la
A
577 N
C
(b)
TAB
兺Fx TBD TBC cos 60° 577 cos 60° N 0,
兺Fy 400 N 577 sen 60° N TBC sen 60° 0,
289 N
289 N
A
TAB
60
60
A
A
TAC
TAC
500 N
500 N
(c)
Figura 6.7
(a) Obtención del diagrama de cuerpo libre de
la junta A.
(b) Fuerzas axiales sobre los elementos AB y
AC.
(c) Diagramas de cuerpo libre realista y
sencillo de la junta A.
260
Capítulo 6 Estructuras en equilibrio
y
400 N
B
60
60
TBD
x
TBC
577 N
346 N
346 N
B
400 N
B
Figura 6.8
(a) Obtención del diagrama de cuerpo
libre de la junta B.
(b) Fuerzas axiales en las barras BD y BC.
800 N
115 N
D
A
B
E
C
500 N
D
C
700 N
(a)
T2
T1
(b)
(a)
Figura 6.9
(a) Junta con dos elementos colineales y
sin carga.
(b) Diagrama de cuerpo libre de la junta.
(a)
115 N
(b)
junta A porque está sometida a la reacción conocida, ejercida por el apoyo, y a
dos fuerzas desconocidas, TAB y TAC (figura 6.7a). Después se podría analizar la
junta B porque está sometida a dos fuerzas conocidas y a dos desconocidas, TBC
y TBD (figura 6.8a). Si se hubiera intentado analizar primero la junta B, se habrían
tenido tres fuerzas desconocidas.
Al determinar las fuerzas axiales en los elementos de una armadura, con frecuencia la tarea se simplifica al estar familiarizado con tres tipos particulares de
juntas.
• Juntas de armaduras con dos elementos colineales y sin carga (figura 6.9).
La suma de las fuerzas debe ser igual a cero, T1 T2. Las fuerzas axiales
son iguales.
• Juntas de armaduras con dos elementos no colineales y sin carga (figura 6.10). Como la suma de las fuerzas en la dirección x debe ser igual a
cero, T2 0. Por lo tanto, T1 también debe ser cero. Las fuerzas axiales son
iguales a cero.
• Juntas de armaduras con tres elementos, dos de ellos colineales, y sin
carga (figura 6.11). Como la suma de las fuerzas en la dirección x debe ser
igual a cero, T3 0. La suma en la dirección y debe ser cero, por lo que
T1 T2. Las fuerzas axiales en los elementos colineales son iguales y la
fuerza axial en el tercer elemento es igual a cero.
y
y
T2
T2
T3
T1
x
x
T1
(b)
Figura 6.10
(a) Junta con dos elementos no colineales
y sin carga.
(b) Diagrama de cuerpo libre de la junta.
(a)
Figura 6.11
(a) Junta con tres elementos, dos de ellos colineales y sin carga.
(b) Diagrama de cuerpo libre de la junta.
(b)
6.2 Método de las juntas
261
RESULTADOS
Método de las juntas
y
Antes de comenzar, por lo
general es necesario dibujar
el diagrama de cuerpo libre
de toda la armadura considerada como un solo objeto y
aplicar las ecuaciones de
equilibrio para determinar las
reacciones en los soportes.
B
A
Aísle una junta individual pasando
planos a través de los elementos conectados. Complete el diagrama de
cuerpo libre mostrando las fuerzas
axiales en los elementos. Aplique
las ecuaciones de equilibrio
Fx 0 y Fy 0 al diagrama de
cuerpo libre de la junta. Repita este
proceso para otras juntas hasta que
se hayan determinado todas las
cargas axiales deseadas.
E
C
D
E
A
Ax
C
F
Ay
F
B
E
D
TAB
A
Si una junta consiste en dos elementos colineales y no se aplican cargas externas a la junta, las
fuerzas axiales en los elementos son iguales.
Si una junta consiste en dos elementos no
colineales y no se aplican cargas externas a la
junta, no existe fuerza axial en ninguno de los
elementos.
E
A
Ax
Juntas especiales
Si una junta consiste en tres elementos, dos
de los cuales son colineales, y no se aplican
cargas externas a la junta, las fuerzas axiales
en los elementos colineales son iguales y la
fuerza axial en el tercer elemento es cero.
B
D
TAC
Ay
Ax
Ay
C
F
E
x
262
Capítulo 6 Estructuras en equilibrio
El método de las juntas ( Problema relacionado 6.1)
Ejemplo activo 6.1
Determine las fuerzas axiales en los elementos AB y AC de la armadura que se presenta en la figura.
A
3m
C
3m
B
D
5m
5m
2 kN
Estrategia
Primero se dibujará un diagrama de cuerpo libre de toda la armadura, tratándola
como un solo objeto, y se determinarán las reacciones en los soportes. Luego se
pueden determinar las fuerzas axiales en los elementos AB y AC dibujando el diagrama de cuerpo libre de la junta A.
Solución
y
Ay
A
Ax
C
6m
D
B B
10 m
x
2 kN
Fx Ax B 0,
Fy Ay 2 kN 0,
Mpunto B (6m)Ax (10 m)(2 kN) 0.
Dibuje el diagrama de cuerpo libre de toda la
armadura y aplique las ecuaciones de equilibrio.
Resolviendo se obtiene Ax 3.33 kN,
Ay 2 kN, y B 3.33 kN.
y
2 kN
A
x
3.33 kN
TAB
TAC
a
2 kN
A
3.33 kN
C
D
3.33 kN B
2 kN
El ángulo a arctan(5/3) 59.0.
Fx TAC sen a 3.33 kN 0,
Fy 2 kN TAB TAC cos a 0.
Resolviendo se obtiene TAB 0 y TAC 3.89 kN.
La fuerza axial en el elemento AB es igual a cero y
la fuerza axial en el elemento AC es 3.89 kN
en tensión, lo cual se escribe
AB: cero, AC: 3.89 kN (T).
Dibuje el diagrama de
cuerpo libre de la junta
A y aplique las ecuaciones de equilibrio.
6.2 Método de las juntas
Problema de práctica Determine las fuerzas axiales en los elementos BC y BD de la
armadura que se muestra en la figura. Para hacer esto, use el hecho de que ya se sabe a
partir del análisis de la junta A que la fuerza axial en el elemento AB es igual a cero.
Respuesta: BC: cero, BD: 3.33 kN (C).
Armadura de un puente ( Relacionado con el problema 6.31)
Ejemplo 6.2
En la figura 1 se muestran las cargas que la estructura de un puente debe soportar,
así como los soportes de pasador en los cuales se va a apoyar. Un estudiante de ingeniería civil encargado del diseño de la estructura propone la estructura mostrada
en la figura 2. ¿Qué valor tienen las fuerzas axiales en los elementos?
Estrategia
Los elementos verticales, AG, BH, CI, DJ y EK están sujetos a fuerzas de compresión de magnitud F. Debido a la simetría de la estructura, es posible determinar las
cargas axiales en los elementos restantes analizando las juntas C y B.
F
F
G
H
b
F
F
b
F
b
F
b
2b
a
F
I
J
b
15
F
b
F
b
15
2b
D
A
K
b
C
B
F
a
E
(1)
(2)
Solución
Se deja como un ejercicio demostrar, mediante el dibujo del diagrama de cuerpo
libre de la junta C, que los elementos BC y CD están sometidos a cargas de compresión iguales con magnitud 1.93F. En la figura a se dibuja el diagrama de cuerpo
libre de la junta B, donde TBC 1.93F.
y
F
TBC
15
A partir de las ecuaciones de equilibrio
兺Fx TAB cos a TBC cos 15° 0,
兺Fy TAB sen a TBC sen 15° F 0,
se obtiene TAB 2.39F y a 38.8°. Por simetría, TDE TAB. Las fuerzas
axiales en los elementos se presentan en la siguiente tabla.
Fuerzas axiales en los elementos de la
estructura del puente
Elementos
AG, BH, CI, DJ, EK
AB, DE
BC, CD
Fuerza axial
F (C)
2.39F (C)
1.93F (C)
B
a
TAB
(a) Diagrama de cuerpo
libre de la junta B.
x
263
264
Capítulo 6 Estructuras en equilibrio
Problemas
6.1 En el ejemplo activo 6.1, suponga que además de la fuerza
descendente de 2 kN que actúa en el punto D, se tiene una
fuerza descendente de 2 kN actuando en el punto C. Trace un
bosquejo de la armadura donde muestre las nuevas cargas. Determine las fuerzas axiales en los elementos AB y AC de la armadura.
6.5 Cada uno de los pesos suspendidos que se muestran en la
figura tiene una masa m 20 kg. Determine las fuerzas axiales
en los elementos de la armadura e indique si están en tensión (T)
o en compresión (C).
A
6.2 Determine las fuerzas axiales en los elementos de la armadura mostrada e indique si están en tensión (T) o en compresión (C).
0.4 m
20
800 N
A
C
B
D
0.4 m
m
m
C
B
0.7 m
0.7 m
0.32 m
0.16 m 0.16 m
Problema 6.5
Problema 6.2
6.3 El elemento AB de la armadura que se muestra en la figura
está sometida a una fuerza a tensión de 1000 lb. Determine el
peso W y la fuerza axial en el elemento AC.
A
6.6 Determine las máximas fuerzas a tensión y compresión que
se presentan en los elementos de la armadura mostrada, e indique
los elementos donde ocurren si
a) la dimensión h 0.1 m;
b) la dimensión h 0.5 m.
Observe cómo un cambio sencillo en el diseño afecta las cargas
axiales máximas.
60 pulg
W
B
B
C
60 pulg
60 pulg
A
h
Problema 6.3
D
6.4 Determine las fuerzas axiales en los elementos BC y CD de
la armadura mostrada.
1 kN
0.4 m
C
600 lb
E
0.6 m
3 pies
C
D
3 pies
A
B
3 pies
3 pies
Problema 6.4
1.2 m
Problema 6.6
0.7 m
265
Problemas
6.7 La armadura de acero mostrada está en el Parque Nacional
Gallatin al sur de Bozeman, Montana, Estados Unidos. Suponga
que una de las armaduras tándem que soportan al puente está
cargada según se muestra en la figura. Determine las fuerzas
axiales en los elementos AB, BC, BD y BE.
6.11 Las cargas F1 = F2 = 8 kN. Determine las fuerzas axiales
en los elementos BD, BE y BG.
F1
D
6.8 Determine las fuerzas máximas a tensión y compresión que
se presentan en los elementos de la armadura de puente mostrada,
también indique los elementos donde ocurren dichas fuerzas.
3m
F2
B
E
3m
G
A
C
4m
4m
Problema 6.11
B
D
F
A
H
C
E
10 kip
17 pies
17 pies
8 pies
G
10 kip
10 kip
17 pies
17 pies
a) la dimensión h 5 pulg;
b) la dimensión h 10 pulg.
Problemas 6.7/6.8
6.9 Las armaduras que soportan el puente en los problemas 6.7 y
6.8 se denominan armaduras Pratt. Suponga que los diseñadores del
puente han decidido usar en su lugar la armadura que se muestra
en la siguiente figura, que se llama armadura Howe. Determine las
fuerzas máximas a tensión y compresión que se presentan en los
elementos, también indique los elementos donde ocurren dichas
fuerzas. Compare sus respuestas con las del problema 6.8.
B
D
6.12 Determine las fuerzas máximas a tensión y compresión que
se presentan en los elementos de la armadura mostrada, también
indique los elementos donde ocurren dichas fuerzas si
Observe cómo un cambio sencillo en el diseño afecta las cargas
axiales máximas.
B
D
h
C
E
20 pulg
E
10 kip
17 pies
20 pulg
30
H 8 pies
17 pies
20 pulg
F
A
C
A
800 lb
Problema 6.12
G
10 kip
17 pies
10 kip
17 pies
Problema 6.9
6.13 La armadura mostrada recibe cargas en C y E. Si F 3 kN,
¿cuáles son las fuerzas axiales en las barras BC y BE?
6.10 Determine las fuerzas axiales en los elementos BD, CD y
CE de la armadura mostrada.
1m
1m
A
1m
B
D
G
300 mm
E
C
1m
F
G
300 mm
C
A
B
400
mm
D
400
mm
6 kN
E
F
400
mm
Problema 6.10
2F
Problema 6.13
266
Capítulo 6 Estructuras en equilibrio
6.14 Si no se desea que los elementos de la armadura mostrada
estén sometidos a una carga axial (a tensión o compresión) mayor
a 20 kN, ¿cuál es la magnitud máxima aceptable de la fuerza
descendente F?
6.17 Determine las fuerzas axiales en los elementos de la armadura mostrada en términos del peso W.
E
B
1m
A
12 m
A
D
F
W
1m
B
C
4m
0.8 m
C
D
0.8 m
0.8 m
3m
Problema 6.17
Problema 6.14
6.15 La armadura que se muestra en la figura es un diseño preliminar de una estructura que conectará un extremo de la camilla
a un helicóptero de salvamento. Con base en simulaciones dinámicas, el ingeniero de diseño estima que las fuerzas descendentes
que ejercerá la camilla no serán mayores a 1.6 kN en A y en B.
¿Qué valor tienen las fuerzas axiales resultantes en los elementos
CF, DF y FG?
6.18 Considere las longitudes de los elementos de la armadura
que se muestra en la figura. La masa de la caja suspendida es de
900 kg. Determine las fuerzas axiales en los elementos.
A
12 m
6.16 Después de saber de un ajuste en el motor del helicóptero,
el ingeniero que está diseñando la armadura realiza nuevas simulaciones y concluye que las fuerzas descendentes que ejercerá la
camilla en A y B, serán hasta de 1.8 kN. ¿Qué valor tienen las
fuerzas axiales resultantes en los elementos DE, DF y DG?
B
13 m
5m
C
13 m
G
300
mm
290
mm
390
mm
12 m
150 mm
F
D
40
480 mm
C
E
Problema 6.18
D
200 mm
B
Problemas 6.15/6.16
A
Problemas
6.19 En la figura se tienen las cargas F1 600 lb y F2 300 lb.
Determine las fuerzas axiales en los elementos AE, BD y CD.
267
6.24 La armadura Pratt para puentes que se muestra en la figura
soporta cinco fuerzas (F 300 kN). La dimensión L 8 m.
Determine las fuerzas axiales en los elementos BC, BI y BJ.
6.20 En la figura se tienen las cargas F1 450 lb y F2 150 lb.
Determine las fuerzas axiales en los elementos AB, AC y BC.
L
L
F1
D
G
L
L
L
L
B
C
D
E
G
I
J
K
L
M
L
H
A
F2
F
B
6 pies
F
C
F
F
F
Problema 6.24
3 pies
E
6.25 Para la armadura de techo mostrada, determine las fuerzas
axiales en los elementos AD, BD, DE y DG. Modele los soportes
en A e I como soportes de rodillo.
A
4 pies
4 pies
Problemas 6.19/6.20
10 kN
6.21 Determine las fuerzas axiales en los elementos BC, CD y
CE de la armadura mostrada.
6 kN
C
8 kN
E
8 kN
6 kN
H
F
B
C
D
3m
3m
4 pies
D
3m
Problema 6.25
4 pies
H
A
4 pies
6.26 La armadura Howe que se muestra en la figura soporta un
techo. Modele los soportes en A y G como soportes de rodillos.
Determine las fuerzas axiales en las barras AB, BC y CD.
4 pies
800 lb
Problema 6.21
600 lb
6.22 La armadura Warren que soporta el puente peatonal de la
figura está diseñada para soportar cargas verticales de 50 kN en
B, D, F y H. Si la armadura está sometida a dichas cargas, ¿cuáles
son las fuerzas axiales resultantes en los elementos BC, CD y CE?
6.23 Para la armadura Warren del problema 6.22, determine las
fuerzas axiales en los elementos DF, EF y FG.
600 lb
D
400 lb
400 lb
C
E
8 pies
B
F
A
G
H
4
pies
I
4
pies
J
4
pies
K
4
pies
Problema 6.26
B
D
F
H
2m
A
C
6m
E
6m
3m
3m
F
12 kip
4 pies
G
3m
G
B
3.6 m
I
A
E
G
6m
Problemas 6.22/6.23
I
6m
L
4
pies
4
pies
268
Capítulo 6 Estructuras en equilibrio
6.29 a) Diseñe una armadura unida a los soportes A y B que
vaya sobre el obstáculo y resista la carga aplicada en el punto C
de la figura.
b) Determine las fuerzas axiales en los elementos de la armadura
que diseñó en el inciso a).
6.27 La armadura plana mostrada forma parte de los soportes de
una grúa sobre una plataforma petrolera lejos de la costa. La grúa
ejerce fuerzas verticales de 75 kN sobre la armadura en B, C y D.
El soporte en A se puede representar como un soporte de pasador
y el soporte en E como un soporte de rodillos que puede ejercer una
fuerza normal a la línea discontinua, pero que no puede ejercer
una fuerza paralela a ella. El ángulo a 45°. Determine las fuerzas
axiales en los elementos de la armadura.
Obstáculo
C
4m
B
A
C
B
6m
D
3.5 m
10 kN
4.5 m
1m
1.8 m
2.2 m
2m
Problema 6.29
F
A
3.4 m
G
3.4 m
H
E
3.4 m
a
6.30 Suponga que se desea diseñar una armadura soportada en A
y B (figura a) capaz de resistir una carga descendente de 3 kN en el
punto C. Si se usa el diseño más sencillo (figura b), el elemento AC
está sometido a una fuerza de tensión de 5 kN. Rediseñe la armadura de manera que la máxima fuerza de tensión sea menor a 3 kN.
3.4 m
Problema 6.27
6.28 a) Diseñe una armadura unida a los soportes A y B que
resista las cargas aplicadas en los puntos C y D de la figura.
b) Determine las fuerzas axiales en los elementos de la armadura
que diseñó en el inciso a).
A
A
1.2 m
C
C
1000 lb
C
B
B
2000 lb
3 kN
3 kN
1.6 m
4 pies
D
(a)
2 pies
B
A
(b)
Problema 6.30
5 pies
5 pies
6.31 La estructura de puente que se muestra en el ejemplo 6.2
puede tener un arco más grande aumentando los ángulos de 15° a
20°. Si se hace esto, cuáles son las fuerzas axiales en los elementos
AB, BC, CD y DE?
5 pies
Problema 6.28
6.3 Método de secciones
ANTECEDENTES
Cuando sólo se requiere conocer las fuerzas axiales en ciertos elementos de una
armadura, es más rápido determinarlas con el método de secciones que con el de
juntas. Por ejemplo, considere de nuevo la armadura Warren que se usó para presentar el método de las juntas (figura 6.12a). La armadura soporta cargas en B y D
y cada elemento tiene 2 m de longitud. Suponga que se desea determinar sólo la
fuerza axial en el elemento BC.
Figura 6.12
(a) Armadura Warren que soporta dos cargas.
(b) Diagrama de cuerpo libre de la armadura
que muestra las reacciones en los soportes.
400 N
800 N
400 N
B
D
B
E
A
2m
C
(a)
800 N
D
E
A
500 N
C
(b)
700 N
6.3 Método de secciones
Como en el método de las juntas, se comienza por dibujar el diagrama de
cuerpo libre de la armadura entera y se determinan las reacciones en los soportes.
Los resultados de este paso se muestran en la figura 6.12b. El siguiente paso es
cortar las barras AC, BC y BD para obtener un diagrama de cuerpo libre de una
parte, o sección, de la armadura (figura 6.13). Sumando momentos respecto al
punto B, las ecuaciones de equilibrio para la sección izquierda son
400 N
800 N
B
兺Fx TAC TBD TBC cos 60° 0,
269
D
A
兺Fy 500 N 400 N TBC sen 60° 0,
C
500 N
兺Mpunto B (2 sen 60° m)TAC (2 cos 60° m)(500 N) 0.
Al resolverlas se obtiene TAC 289 N, TBC 115 N y TBD 346 N.
Observe qué tan similar es este método al método de las juntas. Ambos implican cortar elementos para obtener diagramas de cuerpo libre de las partes de una
armadura. En el método de las juntas se avanza de junta en junta, dibujando diagramas de cuerpo libre y determinando las fuerzas axiales en los elementos. En el
método de las secciones se trata de obtener un solo diagrama de cuerpo libre que
permita determinar las fuerzas axiales en ciertos elementos específicos. En el
ejemplo presentado se obtuvo un diagrama de cuerpo libre cortando tres elementos, incluido aquél (elemento BC) cuya fuerza axial se deseaba determinar.
En contraste con los diagramas de cuerpo libre de juntas, las fuerzas sobre los
diagramas de cuerpo libre usados en el método de las secciones no suelen ser concurrentes y, como en el ejemplo presentado, se pueden obtener tres ecuaciones de
equilibrio independientes. Aunque existen excepciones, por lo general se deben
escoger secciones que no requieran cortar más de tres elementos, porque de lo contrario se tendrían más fuerzas axiales desconocidas que ecuaciones de equilibrio.
RESULTADOS
Método de secciones
E
700 N
y
400 N
TBD
B
60
60
TBC
A
x
TAC
500 N
Figura 6.13
Obtención del diagrama de cuerpo libre de una
sección de la armadura.
Cuando se deben determinar las fuerzas axiales en elementos particulares de una
armadura, a menudo el método de secciones puede proporcionar los resultados
necesarios de una manera más eficiente que el método de las juntas.
y
Antes de comenzar, por lo
general resulta ventajoso
dibujar el diagrama de cuerpo
libre de toda la armadura como
un solo objeto y aplicar las
ecuaciones de equilibrio para
determinar las reacciones en
los soportes.
D
B
A
E
C
D
B
E
A
Ax
C
F
Ay
F
x
E
y
Pase planos a través de un número
suficiente de elementos para aislar
una parte, o sección, de la armadura.
Al hacer esto, procure pasar planos
a través de los elementos cuyas fuerzas axiales se deseen determinar.
Complete el diagrama de cuerpo libre de la sección mostrando las fuerzas axiales en los elementos. Aplique
las ecuaciones de equilibrio al diagrama de cuerpo libre de la sección.
B
TBD
y
TBC
B
A
Ax
D
TAC
Ay
E
A
Ax
Ay
C
F
E
x
270
Capítulo 6 Estructuras en equilibrio
Ejemplo activo 6.3
Método de secciones ( Relacionado con el problema 6.32)
Los elementos horizontales de la armadura mostrada tienen 1 m de longitud. Determine la fuerza axial en los elementos CD, CJ e IJ.
A
B
C
D
E
F
G
H
I
J
K
L
1m
M
100 kN
Estrategia
Al pasar planos a través de los elementos CD, CJ e IJ, se obtendrá una sección de
la cual se pueden obtener las fuerzas axiales deseadas.
Solución
A
B
C
D
E
F
G
H
I
J
K
L
M
100 kN
y
Pase planos a través de los elementos
CD, CJ, e IJ y dibuje el diagrama de
cuerpo libre de la sección.
TCD D
E
F
K
L
TCJ
45
M
TIJ
J
x
100 kN
Fx TCD TCJ cos 45 TIJ 0,
Fy TCJ sen 45 100 kN 0,
Mpunto J (1 m)TCD (3 m)(100 kN) 0.
Al resolver se obtiene TCD 300 kN, TCJ 141 kN,
y TIJ 400 kN. Las cargas axiales son
CD: 300 kN (T), CJ: 141 kN (T),
IJ: 400 kN (C).
Aplique las ecuaciones de equilibrio.
Problema de práctica Use el método de secciones para determinar las fuerzas
axiales en los elementos DE, DK y JK de la armadura.
Respuesta: DE: 200 kN (T), DK: 141 kN (T), JK: 300 kN (C).
6.3 Método de secciones
Ejemplo 6.4
Elección de una sección apropiada ( Relacionado con el problema 6.33)
Determine las fuerzas axiales en los elementos DG y BE de la armadura mostrada.
G
D
J
L
C
I
L
A
B
E
F
L
H
2F
L
K
F
L
L
G
D
Estrategia
No es posible obtener una sección que corte los elementos DG y BE sin cortar más
de tres elementos. Sin embargo, al cortar los elementos DG, BE, CD y BC se obtiene
una sección con la que se puede determinar las fuerzas axiales en DG y BE.
C
Ax
I
A
B
Ay
Solución
Determinación de las reacciones en los soportes En la figura a se presenta el diagrama de cuerpo libre de toda la estructura. A partir de las ecuaciones de equilibrio,
J
F
E
2F
H
K
K
F
(a) Diagrama de cuerpo libre de
toda la armadura.
兺Fx Ax 0,
兺Fy Ay K F 2F F 0,
G
D
J
兺Mpunto A LF (2L)(2F) (3L)F (4L)K 0,
se obtienen las reacciones Ax 0, Ay 2F y K 2F.
Elección de una sección
En la figura b se obtiene una sección cortando los elementos DG, CD, BC y BE.
Como las líneas de acción de TBE, TBC y TCD pasan por el punto B, es posible determinar TDG sumando momentos respecto a B:
C
A
I
B
2F
E
F
K
H
2F
F
2F
兺Mpunto B L(2F) (2L)TDG 0.
La fuerza axial TDG F. Entonces, a partir de la ecuación de equilibrio
TDG
D
兺Fx TDG TBE 0,
se observa que TBE TDG F. El elemento DG está a compresión y el miembro BE está a tensión.
TCD
TBC
Razonamiento crítico
Este es un ejemplo interesante, pero no es del tipo común que puede encontrarse
en la práctica. La sección usada para resolverlo podría no ser obvia aun para una
persona con experiencia en el análisis de estructuras. Observe que el diagrama de
cuerpo libre de la figura b es estáticamente indeterminado, aunque puede usarse
para determinar las fuerzas axiales en los elementos DG y BE.
A
B
2F
F
TBE
(b) Sección de la armadura obtenida al
pasar planos por los elementos DG,
CD, BC y BE.
271
272
Capítulo 6 Estructuras en equilibrio
Problemas
6.32 En el ejemplo activo 6.3, use el método de secciones
para determinar las fuerzas axiales en los elementos BC, BI y HI.
6.33 En el ejemplo 6.4, obtenga una sección de la armadura
pasando planos a través de los elementos BE, CE, CG y DG.
Considere el hecho de que las fuerzas axiales en los elementos
DG y BE ya han sido determinadas y use su sección para determinar las fuerzas axiales en los elementos CE y CG.
6.37 Use el método de secciones para determinar las fuerzas
axiales en los elementos DF, EF y EG de la armadura mostrada.
18 kN
24 kN
C
E
G
300 mm
B
400 mm
a) Use el método de las juntas para determinar la fuerza axial en
el elemento DG.
b) Use el método de secciones para determinar la fuerza axial en
el elemento DG.
400 mm
B
C
400 mm
6.38 Una armadura Pratt para puentes está cargada en la forma
que se muestra en la figura. Use el método de secciones para
determinar las fuerzas axiales en los elementos BD, BE y CE.
D
F
H 8 pies
A
D
C
1m
17 pies
E
G
10 kip
30 kip
20 kip
17 pies
17 pies
17 pies
J
E
F
G
Problema 6.38
H
100 kN
Problemas 6.34/6.35
6.36 Use el método de secciones para determinar las fuerzas
axiales en los elementos AB, BC y CE de la armadura mostrada.
1m
1m
A
B
1m
D
1m
G
C
E
F
2F
Problema 6.36
400 mm
Problema 6.37
B
A
F
D
6.34 La armadura mostrada soporta una carga de 100 kN en J.
Los elementos horizontales tienen 1 m de longitud cada uno.
6.35 Los elementos horizontales de la armadura mostrada tienen
1 m de longitud cada uno. Use el método de secciones para determinar las fuerzas axiales en los elementos BC, CF y FG.
H
A
Problemas
6.39 Una armadura Howe para puentes está cargada en la forma
que se muestra en la figura. Use el método de las secciones para
determinar las fuerzas axiales en los elementos BD, CD y CE.
273
6.43 El puente peatonal mostrado ejerce cargas verticales de
50 kN sobre la armadura Warren en B, D, F y H. Use el método
de secciones para determinar la fuerza axial en el elemento CE.
6.40 Para la armadura Howe para puentes que se muestra en la
figura, use el método de secciones para determinar las fuerzas
axiales en los elementos DF, DG y EG.
B
B
D
H
E
10 kip
17 pies
17 pies
F
H
2m
A
C
D
F
8 pies
G
30 kip
17 pies
A
6m
20 kip
17 pies
C
6m
E
6m
G
6m
I
Problema 6.43
Problemas 6.39/6.40
6.44 Use el método de secciones para determinar las fuerzas
axiales en los elementos AC, BC y BD de la armadura mostrada.
6.41 La armadura Pratt para puentes que se muestra en la figura
soporta cinco fuerzas F 340 kN. La dimensión L 8 m.
Use el método de secciones para determinar la fuerza axial en
el elemento JK.
600 lb
6.42 Para la armadura de puente del problema 6.41, use el método de secciones para determinar la fuerza axial en el elemento EK.
4 pies
C
L
L
L
B
L
L
C
L
D
D
L
E
4 pies
G
A
A
B
H
I
F
J
F
K
F
L
F
Problemas 6.41/6.42
M
F
E
3 pies
3 pies
Problema 6.44
274
Capítulo 6 Estructuras en equilibrio
6.45 Use el método de secciones para determinar las fuerzas axiales en los elementos FH, GH y GI de la armadura mostrada.
6.46 Use el método de secciones para determinar las fuerzas axiales en los elementos DF, DG y EG de la armadura mostrada.
I
300 mm
C
E
G
H
300 mm
A
B
D
F
6 kN
400 mm
400 mm
4 kN
400 mm
400 mm
Problemas 6.45/6.46
6.47 La armadura Howe mostrada ayuda a soportar un techo.
Modele los soportes en A y G como soportes de rodillos.
a) Use el método de las juntas para determinar la fuerza axial en
el elemento BI.
b) Use el método de secciones para determinar la fuerza axial en
el elemento BI.
6.50 Para la armadura de puente que se muestra en la figura,
use el método de secciones para determinar las fuerzas axiales en
los elementos CE, CF y DF.
200 kN
200 kN
200 kN
D
B
6.48 Use el método de secciones para determinar la fuerza axial
en el elemento EJ de la armadura mostrada.
200 kN
200 kN
F
H
J
E
G
C
3m
2 kN
7m
4m
I
A
2 kN
2 kN
D
2 kN
5m
2 kN
C
B
F
A
G
2m
I
2m
J
2m
K
2m
L
2m
5m
2m
Problemas 6.47/6.48
6.51 La carga F 20 kN y la dimensión L 2 m. Use el método
de secciones para determinar la fuerza axial en el elemento HK.
Estrategia: Obtenga una sección cortando los elementos HK,
HI, IJ y JM. Se pueden determinar las fuerzas axiales en los elementos HK y JM, aunque el diagrama de cuerpo libre resultante
sea estáticamente indeterminado.
L
L
6.49 Use el método de secciones para determinar las fuerzas
axiales en los elementos CE, DE y DF de la armadura mostrada.
C
5m
Problema 6.50
E
4m
H
5m
A
B
F
C
L
E
F
D
E
G
4 pies
L
G
B
D
F
I
J
H
12 kip
4 pies
L
H
A
K
4 pies
4 pies
M
4 pies
Problema 6.49
Problema 6.51
6.4 Armaduras espaciales
6.52 El peso de la cubeta mostrada es W 1000 lb. El cable
pasa sobre poleas en A y D.
275
6.54 La armadura mostrada soporta cargas en N, P y R. Determine las fuerzas axiales en los elementos IL y KM.
a) Determine las fuerzas axiales en las barras FG y HI.
6.55 Determine las fuerzas axiales en las barras HJ y GI de la armadura mostrada.
b) Dibuje diagramas de cuerpo libre de las secciones para explicar por qué las fuerzas axiales en las barras FG y HI son iguales.
6.56 Dibuje diagramas de cuerpo libre de las secciones para explicar por qué las fuerzas axiales en las barras DE, FG y HI son
iguales a cero.
6.53 El peso de la cubeta mostrada es W 1000 lb. El cable
pasa sobre poleas en A y D. Determine las fuerzas axiales en las
barras IK y JL.
2m
D
A
C
1m
F
H
3 pies
3 pulg
3 pies
L
B
J
E
3 pies 6 pulg
I
35
W
D
2m
K
A
Problemas 6.52/6.53
2m
2m
M
O
Q
I
L
N
P
R
1 kN 2 kN 1 kN
E
F
2m
2m
K
G
H
2m
G
3 pies
J
2m
2m
C
B
6m
Problemas 6.54–6.56
6.4 Armaduras espaciales
ANTECEDENTES
Una estructura tridimensional sencilla se puede construir conectando seis barras
en sus extremos para obtener un tetraedro, como se muestra en la figura 6.14a.
Agregando elementos es posible obtener estructuras más elaboradas (figuras
6.14b y c). Las estructuras tridimensionales como éstas se denominan armaduras
espaciales si tienen juntas que no ejercen pares sobre los elementos (es decir, las
juntas se comportan como soportes de bola y cuenca) y si están cargadas y soportadas sólo en sus juntas. Las armaduras espaciales se analizan con los mismos
métodos descritos para las armaduras bidimensionales. La única diferencia es la
necesidad de tratar con relaciones geométricas más complicadas.
Considere la armadura espacial de la figura 6.15a. Suponga que la carga
F 2i 6j k (kN). Las juntas A, B y C descansan sobre un piso liso. La
junta A está soportada por la esquina donde se unen las paredes lisas y la junta
(a)
(b)
(c)
Figura 6.14
Armaduras espaciales con 6, 9 y 12 elementos.
276
Capítulo 6 Estructuras en equilibrio
C descansa contra la pared posterior. A esta armadura se le puede aplicar el
método de las juntas.
Primero es necesario determinar las reacciones ejercidas por los soportes (el
piso y las paredes). En la figura 6.15b se dibuja el diagrama de cuerpo libre de
toda la armadura. La esquina puede ejercer tres componentes de fuerza en A, el
piso y la pared dos componentes en C, y el piso una fuerza normal en B. Sumando
momentos respecto a A, se encuentra que las ecuaciones de equilibrio, con las
fuerzas en kN y las distancias en m, son
y
F
D (2, 3, 1) m
A
C (4, 0, 0) m
x
©Fy = A y + B y + C y - 6 = 0,
B (2, 0, 3) m
(a)
z
©Fx = A x - 2 = 0,
©Fz = A z + C z - 1 = 0,
兺Mpunto A (rAB By j) [rAC (Cy j Cz k)] (rAD F)
y
i
= 32
0
F
D (2, 3, 1) m
Ay
A
Cy
C (4, 0, 0) m
x
Cz
Ax
Az
z
By
B (2, 0, 3) m
(b)
F
D
4 kN
A
2 kN
1 kN
1 kN
C
B
j
0
By
k
i
33 + 34
0
0
j
0
Cy
k
i
0 3+ 3 2
Cz
-2
j
3
-6
k
1 3
-1
= (- 3B y + 32i + 1-4C z2j
+ 12B y + 4Cy - 62k = 0.
Resolviendo estas ecuaciones se obtienen las reacciones Ax 2 kN, Ay 4 kN,
Az 1 kN, By 1 kN, Cy 1 kN y Cz 0.
En este ejemplo, las fuerzas axiales en los elementos AC, BC y CD pueden
determinarse a partir del diagrama de cuerpo libre de la junta C (figura 6.15c).
Para escribir las ecuaciones de equilibrio de la junta se deben expresar las tres
fuerzas axiales en términos de sus componentes. Como el elemento AC se
encuentra sobre el eje x, la fuerza ejercida sobre la junta C por la fuerza axial TAC
se expresa como el vector TACi. Sea rCB el vector de posición de C a B:
rCB = 12 - 42i + 10 - 02j + 13 - 02k = - 2i + 3k 1m2.
Al dividir este vector entre su magnitud se obtiene el siguiente vector unitario que
apunta desde C hacia B,
1 kN
eCB =
TCD
TAC
Cy 1 kN
C
TBC
(c)
Figura 6.15
(a) Armadura espacial que soporta una carga F.
(b) Diagrama de cuerpo libre de toda la
armadura.
(c) Obtención del diagrama de cuerpo libre de
la junta C.
rCB
ƒ rCB ƒ
= - 0.555i + 0.832k,
y se expresa la fuerza ejercida sobre la junta C por la fuerza axial TBC como el
vector
TBC eCB = TBC1-0.555i + 0.832k2.
De la misma manera, se expresa la fuerza ejercida sobre la junta C por la fuerza
axial TCD como el vector
TCD1-0.535i + 0.802j + 0.267k2.
6.4 Armaduras espaciales
Si la suma de las fuerzas sobre la junta se iguala a cero, resulta
-TAC i + TBC1-0.555i + 0.832k2
+TCD1-0.535i + 0.802j + 0.267k2 + 11 kN2j = 0,
y se obtienen las tres ecuaciones de equilibrio
©Fx = - TAC - 0.555TBC - 0.535TCD = 0,
©Fy = 0.802TCD + 1 kN = 0,
©Fz = 0.832TBC + 0.267TCD = 0.
Resolviendo estas ecuaciones, las fuerzas axiales son TAC 0.444 kN, TBC 0.401
kN y TCD 1.247 kN. Los elementos AC y BC están a tensión y la barra CD a
compresión. Continuando con el dibujo de los diagramas de cuerpo libre de las
juntas restantes, es posible determinar las fuerzas axiales en todos los elementos.
Como lo demuestra este ejemplo, se pueden obtener tres ecuaciones de equilibrio a partir del diagrama de cuerpo libre de una junta en tres dimensiones, por
lo que deben elegirse juntas que estén sometidas a fuerzas conocidas con no más
de tres fuerzas desconocidas.
RESULTADOS
Una armadura espacial es aquella cuyos elementos no son coplanares. Las
fuerzas axiales en los elementos de una armadura espacial estáticamente determinada pueden obtenerse mediante la aplicación del método de las juntas.
Antes de comenzar, usualmente es necesario dibujar el diagrama de cuerpo libre de toda
la armadura considerada como
un solo objeto y aplicar las
ecuaciones de equilibrio para
determinar las reacciones en
los soportes.
D
Aísle una junta individual pasando
planos a través de los elementos conectados. Complete el diagrama de
cuerpo libre mostrando las fuerzas
axiales en los elementos. Aplique la
ecuación de equilibrio F 0 al
diagrama de cuerpo libre de la junta.
Repita este proceso para otras juntas
hasta que hayan sido determiadas las
cargas axiales deseadas.
A
C
B
TCD
TAC
TBC
C
277
278
Capítulo 6 Estructuras en equilibrio
Ejemplo activo 6.5
Armadura espacial ( Relacionado con el problema 6.57)
La armadura espacial tiene soportes de rodillo en B, C y D y soporta una carga vertical de 1200 lb en A. Determine las fuerzas axiales en los elementos AD, BD y CD.
y
1200 lb
A (5, 3, 2) pies
B
D (10, 0, 0) pies
x
z
C (6, 0, 6) pies
Estrategia
Primero se dibuja el diagrama de cuerpo libre de toda la armadura, tratándola como
un solo objeto, y se determinan las reacciones en los soportes. Después se pueden
determinar las fuerzas axiales en los elementos AD, BD y CD dibujando el diagrama de cuerpo libre de la junta D.
Solución
y
y
1200 lb
1200 lb
A (5, 3, 2) pies
A
B
B
D (10, 0, 0) pies
D
x
x
B
z
D
C (6, 0, 6) pies
z
C
C
Fy B C D 1200 lb 0,
Mpunto B rBA [1200j (lb)] rBC Cj rBD Dj
i
j
k
i
j
k
5
3
2 6
0
C
0 1200 0
0
i
j
k
6 10
0
0
0
D
0
(2400 6C)i (6000 6C 10D )k 0.
Resolviendo se obtiene B 440 lb, C 400 lb y D 360 lb.
0
Dibuje el diagrama de cuerpo
libre de toda la armadura y aplique las ecuaciones de equilibrio.
6.4 Armaduras espaciales
y
1200 lb
A (5, 3, 2) pies
TAD
D (10, 0, 0) pies
x
440 lb
z
TBD
360 lb
C (6, 0, 6) pies
D
Dibuje los diagramas de
cuerpo libre de la junta D.
360 lb
TCD
400 lb
rDA 5i 3j 2k (pies).
rDA
eDA 0.811i 0.487j 0.324k.
兩rDA兩
TADeDA TAD (0.811i 0.487j 0.324k),
TBDeDB TBDi,
TCDeDC TCD (0.555i 0.832k).
Divida el vector de posición desde D
hasta A entre su magnitud para obtener un vector unitario eDA que apunte
desde D hacia A. Exprese la fuerza
axial en el elemento AD en términos
de sus componentes, escribiéndola
como TADeDA. Exprese las fuerzas
axiales en los elementos BD y CD
en términos de sus componentes de
la misma manera.
TADeDA TBDeDB TCDeDC (360 lb)j 0.
Cada una de las componentes i, j, y k de esta ecuación deben
ser iguales a cero, lo que resulta en las sigs. tres ecuaciones
0.811TAD TBD 0.555TCD 0,
0.487TAD 360 lb 0,
0.324TAD 0.832TCD 0.
Al resolver se obtiene TAD 740 lb, TBD 440 lb,
y TCD 288 lb. Las fuerzas axiales son AD: 740 lb (C),
BD: 440 lb (T), CD: 288 lb (T).
Aplique el equilibrio.
Problema de práctica Determine las fuerzas axiales en los elementos AB y AC de la
armadura mostrada.
Respuesta: AB: 904 lb (C), AC: 680 lb (C).
279
280
Capítulo 6 Estructuras en equilibrio
Problemas
6.57 En el ejemplo activo 6.5, dibuje el diagrama de cuerpo
libre de la junta B de la armadura espacial mostrada y utilícelo
para determinar las fuerzas axiales en los elementos AB, BC y BD.
6.58 La armadura espacial mostrada soporta una carga vertical de
10 kN en D. Se muestran las reacciones en las juntas A, B y C. ¿Qué
valor tienen las fuerzas axiales en los elementos AD, BD y CD?
6.59 Las reacciones en las juntas A, B y C se muestran en la figura.
¿Qué valor tienen las fuerzas axiales en los elementos AB, AC y AD?
6.63 La armadura espacial mostrada representa el tren de aterrizaje de un avión. Tiene soportes de bola y cuenca en C, D y E. Si
la fuerza ejercida en A por la rueda es F 40j (kN), ¿qué valor
tienen las fuerzas axiales en los elementos AB, AC y AD?
6.64 Si la fuerza ejercida en el punto A de la armadura del
problema 6.63 es F 10i 60j 20k (kN), ¿qué valor tienen
las fuerzas axiales en los elementos BC, BD y BE?
y
y
10 kN
E (0, 0.8, 0) m
D (4, 3, 1) m
Ax A
Ay
D
Cy
0.4 m
C (6, 0, 0) m
Az
By
z
Cz
B (5, 0, 3) m
B
x
(1, 0, 0) m
x
0.6 m
A
(1.1, 0.4, 0) m
C
z
Problemas 6.58/6.59
6.60 La armadura espacial mostrada soporta una carga vertical F
en A. Cada elemento tiene una longitud L, y la armadura tiene soportes de rodillo en B, C y D. Determine las fuerzas axiales en los
elementos AB, AC y AD.
6.61 Para la armadura del problema 6.60, determine las fuerzas
axiales en los elementos AB, BC y BD.
F
A
F
Problemas 6.63/6.64
6.65 La armadura espacial mostrada se sostiene mediante soportes de rodillo sobre la superficie horizontal en C y D, y por medio
de un soporte de bola y cuenca en E. El eje y apunta hacia arriba.
La masa del objeto suspendido es 120 kg. Las coordenadas de las
juntas de la armadura son A: (1.6, 0.4, 0) m, B: (1.0, 1.0, 0.2) m,
C: (0.9, 0, 0.9) m, D: (0.9, 0, 0.6) m, y E: (0, 0.8, 0) m. Determine las fuerzas axiales en los elementos AB, AC y AD.
B
y
D
B
E
C
Problemas 6.60/6.61
D
6.62 La armadura espacial mostrada tiene soportes de rodillo en
B, C y D y sostiene una carga vertical en A de 800 lb. ¿Qué valor
tienen las fuerzas axiales en los elementos AB, AC y AD?
A
C
z
y
800 lb
A (4, 3, 4) pies
Problema 6.65
B
D (6, 0, 0) pies
x
z
C (5, 0, 6) pies
Problema 6.62
x
Problemas
6.66 En la figura se muestra el diagrama de cuerpo libre de la
parte de una grúa para construcción que se encuentra a la izquierda
del plano. Las coordenadas (en metros) de las juntas A, B y C son
(1.5, 1.5, 0), (0, 0, 1) y (0, 0, 1) respectivamente. Las fuerzas
axiales P1, P2 y P3 son paralelas al eje x. Las fuerzas axiales P4, P5
y P6 apuntan en la dirección de los siguientes vectores unitarios
e4 = 0.640i - 0.640j - 0.426k,
281
6.68 La caja del espejo de telescopio que se muestra en la figura
está soportada por una armadura espacial de seis barras. La masa
de la caja es de 3 Mg (megagramos), y su peso actúa en G. La
distancia del eje del telescopio a los puntos A, B y C es de 1 m,
y a los puntos D, E y F es de 2.5 m. Si el eje del telescopio es
vertical (a 90°), ¿qué valor tienen las fuerzas axiales en los
elementos de la armadura?
e5 = 0.640i - 0.640j + 0.426k,
e6 = 0.832i - 0.555k.
La fuerza total ejercida en el diagrama de cuerpo libre por el peso
de la grúa y la carga que ésta soporta es Fj 44j (kN) y actúa
en el punto (20, 0, 0) m. ¿Cuál es el valor de la fuerza axial P3?
Estrategia: Use el hecho de que el momento respecto a la
línea que pasa por las juntas A y B es igual a cero.
6.69 Considere el telescopio descrito en el problema 6.68. Determine las fuerzas axiales en los elementos cuando el ángulo a entre
la horizontal y el eje del telescopio es de 20°.
VISTA DEL
EXTREMO y
60
6.67 En el problema 6.66, ¿qué valor tienen las fuerzas P1, P4 y P5?
Estrategia: Escriba las ecuaciones de equilibrio para todo el
diagrama de cuerpo libre.
60
D
60
A
B
60
Caja del espejo
F
G
60
C
E
x
60
y
z
A
G
F
C
B
D
a
1m
4m
E
x
Problemas 6.68/6.69
y
A
F
z
B
C
P6
P2
P1
P5 P4
P3
Problemas 6.66/6.67
x
282
Capítulo 6 Estructuras en equilibrio
6.5 Bastidores y máquinas
ANTECEDENTES
Muchas estructuras, como el bastidor de un automóvil y la estructura humana de
huesos, tendones y músculos (figura 6.16), no están compuestas completamente
de elementos de dos fuerzas y no pueden modelarse como armaduras. En esta sección se considerarán estructuras de elementos interconectados que no satisfacen
la definición de una armadura. Estas estructuras se denominan bastidores si están
diseñados para permanecer en reposo al soportar cargas, y máquinas si están diseñadas para moverse y aplicar cargas.
Cuando se analizan armaduras cortando barras para obtener diagramas de
cuerpo libre de juntas o secciones, las fuerzas internas que actúan en los “cortes”
son simples fuerzas axiales (vea la figura 6.4). Esto no es generalmente cierto para
bastidores o máquinas, y se requiere un método diferente para su análisis. En lugar
de cortar elementos, se aíslan de la estructura elementos completos o en algunos
casos combinaciones de elementos.
Para analizar un bastidor o una máquina, se dibuja un diagrama de cuerpo libre
de toda la estructura (es decir, tratándola como un solo objeto) y se determinan la reacciones en sus soportes. En algunos casos, la estructura entera será estáticamente indeterminada, pero se debe determinar tantas reacciones como sea posible. Luego se
dibujan diagramas de cuerpo libre de elementos individuales, o de combinaciones de
elementos seleccionados, y se aplican las ecuaciones de equilibrio para determinar las
fuerzas y los pares que actúan sobre ellos. Por ejemplo, considere la estructura en
Figura 6.16
La estructura interna de una persona y el bastidor de un automóvil no son armaduras.
6.5 Bastidores y máquinas
reposo de la figura 6.17. El elemento BE es un elemento de dos fuerzas, pero los otros
tres miembros, ABC, CD y DEG, no lo son. Esta estructura es un bastidor. El objetivo consiste en determinar las fuerzas en sus elementos.
1m
1m
1m
6 kN
A
B
C
Análisis de la estructura completa
En la figura 6.18 se presenta el diagrama de cuerpo libre del bastidor completo.
Es estáticamente indeterminado: tiene cuatro reacciones desconocidas, Ax, Ay, Gx
y Gy, mientras que sólo se puede escribir tres ecuaciones independientes de equilibrio. Sin embargo, observe que las líneas de acción de tres de las reacciones
desconocidas se intersecan en A. Al sumar momentos respecto a A se obtiene
Mpunto A (2 m)Gx (1 m)(8 kN) (3 m)(6 kN) 0,
y se obtiene la reacción Gx 5 kN. Después, a partir de la ecuación de equilibrio
兺Fx Ax Gx 8 kN 0,
se obtiene la reacción Ax 13 kN. Aunque no es posible determinar Ay o Gy con
base en el diagrama de cuerpo libre de la estructura, sí puede lograrse analizando
los elementos individuales.
Análisis de los elementos
El siguiente paso consiste en dibujar los diagramas de cuerpo libre de los elementos.
Para ello, se considera la unión de un elemento con otro como si fuera un soporte.
Visto de esta manera, cada elemento puede considerarse como un objeto soportado
del tipo analizado en el capítulo 5. Además, las fuerzas y los pares que los elementos ejercen entre sí son iguales en magnitud y opuestos en dirección. Una simple
1m
1m
1m
6 kN
A
B
C
1m
8 kN
G
E
1m
D
3m
A
Ay
6 kN
B
C
Ax
1m
2m
8 kN
Gy
Gx G
E
D
Figura 6.18
Obtención del diagrama de cuerpo libre
del bastidor completo.
283
1m
8 kN
1m
G
E
D
Figura 6.17
Bastidor que soporta dos cargas.
284
Capítulo 6 Estructuras en equilibrio
F
F
(a)
(b)
Figura 6.19
Demostración de la tercera ley de Newton:
(a) Sujete sus manos y jale su mano izquierda.
(b) Sus manos ejercen fuerzas iguales y opuestas.
demostración resulta ilustrativa. Si usted sujeta sus manos como se muestra en la
figura 6.19a y ejerce una fuerza sobre su mano izquierda, su mano izquierda ejerce
una fuerza igual y opuesta sobre su mano derecha (figura 6.19b). De manera similar,
si usted ejerce un par sobre su mano izquierda, su mano izquierda ejerce un par igual
y opuesto sobre su mano derecha.
En la figura 6.20 se “desarma” el bastidor y se dibujan los diagramas de cuerpo
libre de sus elementos. Observe que las fuerzas ejercidas entre sí por los elementos
son iguales y opuestas. Por ejemplo, en el punto C del diagrama de cuerpo libre del
elemento ABC, la fuerza ejercida por CD se denota mediante las componentes Cx
y Cy. Las fuerzas ejercidas por el elemento ABC sobre CD en C deben ser iguales y
opuestas, como se muestra en la figura.
6k N
Ay
B
A
C
Ax
Cx
T
Cy
6 kN
Ay
T
B
A
B
Cx
C
C
Ax
Cy
8 kN
Gy
E
Gx
G
E
8 kN
Dx
D
T
D
Dy
Gx
G
Dy
T
Gy
E
D
Dx
Figura 6.20
Obtención de los diagramas de cuerpo libre de los elementos.
285
6.5 Bastidores y máquinas
Antes de completar el análisis es necesario analizar dos aspectos importantes
de esos diagramas de cuerpo libre.
Elementos de dos fuerzas BE es un elemento de dos fuerzas, y se ha tomado
en cuenta esto al dibujar su diagrama de cuerpo libre en la figura 6.20. La fuerza T
es la fuerza axial en el elemento BE, y una fuerza igual y opuesta está actuando
sobre ABC en B y sobre GED en E.
Si se reconocen los elementos de dos fuerzas en los bastidores y máquinas y se
dibujan sus diagramas de cuerpo libre como ha ocurrido aquí, se reduce el número
de incógnitas por determinar y el análisis se simplifica en gran medida. En este
ejemplo no se trata al miembro BE como un elemento de dos fuerzas; su diagrama
de cuerpo libre tendrá cuatro fuerzas desconocidas (figura 6.21a). Tratándolo como
un elemento de dos fuerzas (figura 6.21b), el número de fuerzas desconocidas se
reduce en tres.
Cargas aplicadas en las juntas Cuando una carga se aplica en una junta surge
la siguiente pregunta: ¿Dónde aparece la carga en los diagramas de cuerpo libre de
los elementos individuales? La respuesta es: la carga puede colocarse en cualquiera
de los elementos unidos en la junta. Por ejemplo, en la figura 6.17, la carga de 6 kN
actúa en la junta donde se conectan los elementos ABC y CD. Al dibujar los diagramas de cuerpo libre de los elementos individuales (figura 6.20), se supuso que
la carga de 6 kN actúa sobre el elemento ABC. Las componentes de fuerza Cx y Cy
sobre el diagrama de cuerpo libre del elemento ABC son las fuerzas ejercidas por el
elemento CD.
Para explicar por qué los diagramas de cuerpo libre pueden dibujarse de esta
manera, suponga que la fuerza de 6 kN actúa sobre el pasador que conecta los elementos ABC y CD, y dibuje diagramas de cuerpo libre separados para el pasador
y los dos elementos (figura 6.22a). Las componentes de fuerza Cx y Cy son las
fuerzas ejercidas por el pasador sobre el elemento ABC, y Cx y Cy son las fuerzas ejercidas por el pasador sobre el elemento CD. Si se superponen los diagramas de cuerpo libre del pasador y del elemento ABC, se obtienen los dos diagramas de cuerpo
libre de la figura 6.22b, que tienen la forma del diagrama de la figura 6.20. De
manera alternativa, si se superponen los diagramas de cuerpo libre del pasador y
el elemento CD, se obtienen los dos diagramas de cuerpo libre de la figura 6.22c.
Entonces, si en una carga actúa una junta, ésta se puede colocar sobre cualquiera de los elementos unidos en la junta cuando se dibujen los diagramas de
cuerpo libre de los elementos individuales. Sólo asegúrese de no colocarla en más
de un elemento.
By
Bx
T
B
B
E
E
Ex
Ey
(a)
T
(b)
Figura 6.21
Diagrama de cuerpo libre del elemento BE:
(a) Sin tratarlo como elemento de dos fuerzas.
(b) Tratándolo como elemento de dos fuerzas.
Cx
6 kN
Cx
6 kN
Cy
Cx
Cx
Cx
6 kN
Cy
Cy
Cy
(b)
Cy
6 kN
Cx
Cx
Cy
(a)
Cx
Cy
Cy
(c)
Figura 6.22
(a) Dibujo de los diagramas de cuerpo libre
del pasador y de los dos elementos.
(b) Superposición del pasador sobre el
elemento ABC.
(c) Superposición del pasador sobre el
elemento CD.
286
Capítulo 6 Estructuras en equilibrio
6 kN
Ay
A
B
C
Ax
Cx
T
Cy
6 kN
T
B
T
B
Ay
A
Ax
E
Gx
T
G
T
E
T
Gy
Gx
G
Dy
Dx
D
Dy
Cy
Cy
8 kN
8 kN
Dx
Dx
D
Dy
Dy
T
E
C
Cx
Cx
Cy
T
Gy
Cx
C
D
Dx
(a)
6 kN
Ay
A
B
C
Ax
8 kN
Gy
Gx G
E
D
(b)
Figura 6.23
(a) “Reensamble” de los diagramas de cuerpo libre de los elementos
individuales.
(b) Se ha recuperado el diagrama de cuerpo libre del bastidor completo.
Para detectar errores en los diagramas de cuerpo libre de los elementos, resulta
útil “reensamblarlos” (figura 6.23a). Las fuerzas en las conexiones entre elementos
se cancelan (son fuerzas internas una vez que los elementos se reensamblan) y se
recupera el diagrama de cuerpo libre de la estructura completa (figura 6.23b).
El paso final consiste en aplicar las ecuaciones de equilibrio a los diagramas de cuerpo libre de los elementos (figura 6.24). En dos dimensiones, es
posible obtener tres ecuaciones de equilibrio independientes del diagrama de
cuerpo libre de cada elemento de una estructura que no se trate como un elemento de dos fuerzas (al suponer que las fuerzas sobre un elemento de dos fuerzas son fuerzas axiales iguales y opuestas, ya se han usado las tres ecuaciones
de equilibrio para ese elemento). En este ejemplo, hay tres elementos además del
elemento de dos fuerzas, por lo que se tienen 3 3 9 ecuaciones de equilibrio independientes y hay nueve fuerzas desconocidas: Ax, Ay, Cx, Cy, Dx, Dy,
Gx, Gy y T.
Recuerde que se determinó que Ax 13 kN y Gx 5 kN a partir del análisis
de la estructura completa. Las ecuaciones de equilibrio obtenidas del diagrama de
cuerpo libre de la estructura no son independientes de las ecuaciones de equilibrio
6.5 Bastidores y máquinas
6 kN
Ay
B
A
Gy
T
G
E
Dy
C
Ax
Gx
Cx
T
1m
D
Dx
Cy
2m
1m
(a)
1m
(b)
Cx
C
Cy
1m
8 kN
1m
Dx
D
Dy
1m
Figura 6.24
Diagramas de cuerpo libre de los elementos.
(c)
obtenidas a partir de los diagramas de cuerpo libre de los elementos, pero al usarlas
para determinar Ax y Gx, se adelanta en la solución de las ecuaciones para los elementos. Considere el diagrama de cuerpo libre del elemento ABC (figura 6.24a).
Como ya se conoce Ax, es posible determinar Cx a partir de la ecuación
兺Fx Ax Cx 0,
y se obtiene Cx Ax 13 kN. Ahora considere el diagrama de cuerpo libre de
GED (figura 6.24b). Es posible determinar Dx a partir de la ecuación
兺Fx Gx Dx 0,
de donde se obtiene Dx Gx 5 kN. Ahora considere el diagrama de cuerpo
libre del elemento CD (figura 6.24c). Como ya se conoce Cx, es posible determinar Cy sumando momentos respecto a D:
兺Mpunto D (2 m)Cx (1 m)Cy (1 m)(8 kN) 0.
Se obtiene Cy 18 kN. Entonces, a partir de la ecuación
兺Fy Cy Dy 0,
se encuentra que Dy Cy 18 kN. Ahora es posible regresar a los diagramas
de cuerpo libre de los elementos ABC y GED para determinar Ay y Gy. Sumando
momentos respecto al punto B del elemento ABC, resulta
兺Mpunto B (1 m)Ay (2 m)Cy (2 m)(6 kN) 0,
287
288
Capítulo 6 Estructuras en equilibrio
36 kN
13 kN
B
6 kN
C
24 kN
36 kN
A
B
18 kN
C
13 kN
36 kN
13 kN
18 kN
8 kN
18 kN
G
E
D
5 kN
5 kN
18 kN
18 kN
E
D
5 kN
36 kN
Figura 6.25
Fuerzas sobre los elementos del bastidor.
y se obtiene Ay 2Cy 12 kN 24 kN. Después, sumando momentos respecto
al punto E del elemento GED, se tiene
兺Mpunto E (1 m)Dy (1 m)Gy 0,
de donde se obtiene Gy Dy 18 kN. Por último, a partir del diagrama de cuerpo libre del elemento GED se usa la ecuación de equilibrio
兺Fy Dy Gy T 0,
lo que da como resultado T Dy Gy 36 kN. Las fuerzas sobre los elementos se muestran en la figura 6.25. Como lo demuestra este ejemplo, con frecuencia la determinación de las fuerzas en los elementos se puede simplificar si se
escoge con cuidado el orden en que se resolverán las ecuaciones de equilibrio.
Se ha visto que la determinación de las fuerzas y los pares que actúan sobre
los elementos de bastidores y máquinas implica dos pasos:
1. Determinar las reacciones en los soportes. Dibuje el diagrama de cuerpo libre
de la estructura completa y determine las reacciones en los soportes. Aunque
este paso no es esencial, puede simplificar en forma considerable el análisis
de los elementos. Si el diagrama de cuerpo libre es estáticamente indeterminado, determine tantas reacciones como sea posible.
2. Analizar los elementos. Dibuje los diagramas de cuerpo libre de los elementos y aplique las ecuaciones de equilibrio para determinar las fuerzas que
actúan sobre ellos. Este paso se puede simplificar identificando los elementos
de dos fuerzas. Si una carga actúa sobre una junta de la estructura, la carga se
puede colocar en el diagrama de cuerpo libre de cualquiera de los elementos
unidos a esa junta.
RESULTADOS
Una estructura de elementos interconectados que no puede modelarse como una
armadura se denomina bastidor si está diseñada para permanecer estacionaria y
soportar cargas, y se llama máquina si está diseñada para moverse y aplicar cargas.
Las fuerzas y pares que actúan sobre los elementos individuales de un bastidor o
máquina en equilibrio puede determinarse frecuentemente aplicando las ecuaciones
de equilibrio a los elementos individuales.
6.5 Bastidores y máquinas
A menudo resulta ventajoso comenzar dibujando el diagrama de cuerpo libre de toda la estructura considerada como un solo objeto y aplicando las
ecuaciones de equilibrio. Aunque el diagrama de cuerpo libre de toda la
estructura sea estáticamente indeterminado, es posible determinar las
reacciones a partir del subsecuente análisis de los elementos individuales.
A
A
F
F
B
B
D
E
C
Cx
D
E
C
Cy
E
Dibuje los diagramas de cuerpo libre de los elementos individuales y aplique en ellos
las ecuaciones de equilibrio. Observe que en los puntos donde están conectados dos
elementos, las fuerzas que éstos ejercen entre sí son iguales y opuestas. Observe
que el elemento BD es un elemento de dos fuerzas. El reconocimiento de los
elementos de dos fuerzas simplificará el análisis de una estructura.
A
Ax
Ay
Ay
A
A
D
Ax
F
T
E
F
B
D
E
T
C
Cx
E
C
Cx
Cy
Cy
E
B
T
D
T
289
290
Capítulo 6 Estructuras en equilibrio
Ejemplo activo 6.6
Análisis de un bastidor ( Relacionado con el problema 6.70)
Determine las fuerzas y los pares que actúan sobre los elementos del bastidor
mostrado.
A
B
200 N-m
400 mm
C
600 mm
400 mm
Estrategia
Primero se dibujará un diagrama de cuerpo libre de todo el bastidor, tratándolo
como un solo objeto, y se intentará determinar las reacciones en los soportes.
Después se dibujarán diagramas de cuerpo libre de los elementos individuales y
se aplicarán las ecuaciones de equilibrio para determinar las fuerzas y los pares
que actúan sobre ellos.
Solución
MA
A
B
Ax
400 mm
200 N-m
Ay
C
1000 mm
Fx Ax 0,
Fy Ay C 0,
Mpunto A MA 200 N-m (1.0 m)C 0.
La reacción Ax 0, pero Ay, C, y MA
no pueden determinarse a partir de estas ecuaciones.
El diagrama de cuerpo libre del bastidor completo
es estáticamente indeterminado.
Dibuje el diagrama de cuerpo libre de todo el bastidor y aplique
las ecuaciones de equilibrio.
C
6.5 Bastidores y máquinas
MA
B
A
By
Ax
Ay
MA
Bx
600 mm
B
A
B
Ax
Bx
By
400 mm
200 N-m
Ay
200 N-m
C
C
C
C
Dibuje los diagramas
de cuerpo libre de los
elementos individuales.
400 mm
Fx Bx 0,
Fy By C 0,
Aplique el equilibrio al elemento BC.
Mpunto B 200 N-m (0.4 m)C 0.
Resolviendo se obtiene Bx 0, By 500 N, y
C 500 N.
Fx Ax Bx 0,
Fy Ay By 0,
Mpunto A MA (0.6 m)By 0.
Como Ax, Bx, y By ya se han
determinado, es posible despejar
Ay y MA de estas ecuaciones. Los
resultados son Ay 500 N
y MA 300 N-m, lo cual
completa la solución.
Aplique el equilibrio al elemento AB.
Problema de práctica El bastidor mostrado tiene soportes de pasador en A y C.
Determine las fuerzas y pares sobre el elemento BC en B y C.
A
B
200 N-m
400 mm
C
600 mm
400 mm
Respuesta: Bx 500 N, By 0, Cx 500 N, Cy 0. (En las respuestas, las componentes x
son positivas hacia la derecha y las componentes y son positivas hacia arriba).
291
292
Capítulo 6 Estructuras en equilibrio
Determinación de fuerzas sobre elementos de un bastidor ( Relacionado con el
Ejemplo 6.7
problema 6.74)
El bastidor de la figura soporta un peso suspendido W 40 lb. Determine las fuerzas en los elementos ABCD y CEG.
D
3 pulg
6 pulg
G
E
C
6 pulg
B
W
6 pulg
A
8 pulg
8 pulg
Estrategia
Se dibujará un diagrama de cuerpo libre de todo el bastidor y se intentará determinar las reacciones en los soportes. Después se dibujarán los diagramas de cuerpo libre
de los elementos individuales y se usarán las ecuaciones de equilibrio para determinar
las fuerzas y los pares que actúan sobre ellos. Para hacer esto, se tomará ventaja del
hecho de que la barra BE es un elemento de dos fuerzas.
Solución
Determinación de las reacciones en los soportes En la figura (a) se presenta el
diagrama de cuerpo libre de todo el bastidor. A partir de las ecuaciones de equilibrio
兺Fx Ax D 0,
兺Fy Ay 40 lb 0,
兺Mpunto A (18 pulg)D (19 pulg)(40 lb) 0,
se obtienen las reacciones Ax 42.2 lb, Ay 40 lb y D 42.2 lb.
D
Análisis de los elementos En la figura (b) se obtienen los diagramas de cuerpo
libre de los elementos. Observe que BE es un elemento de dos fuerzas. El ángulo
a arctan(6兾8) 36.9°.
El diagrama de cuerpo libre de la polea tiene sólo dos fuerzas desconocidas.
De las ecuaciones de equilibrio
D
G
C
兺Fx Gx 40 lb 0,
兺Fy Gy 40 lb 0,
E
18 pulg
B
Ax
40 lb
A
Ay
19 pulg
(a) Diagrama de cuerpo libre del bastidor
completo.
se obtiene Gx 40 lb y Gy 40 lb. Hay ahora sólo tres fuerzas desconocidas en el
diagrama de cuerpo libre del elemento CEG. A partir de las ecuaciones de equilibrio
兺Fx Cx R cos a 40 lb 0,
兺Fy Cy R sen a 40 lb 0,
兺Mpunto C (8 pulg)R sen a (16 pulg)(40 lb) 0,
se obtiene Cx 66.7 lb, Cy 40 lb y R 133.3 lb, lo que completa la solución
(figura c).
6.5 Bastidores y máquinas
8 pulg
C
Cx
42.2 lb
D
G Gx
a
R
Cy
D
8 pulg
E
Gy
42.2 lb
40 lb
6 pulg
Cx
40 lb
3 pulg
G
C
C
Gx
E
R
a
B
6 pulg Cy
Gy
B
40 lb
6 pulg
42.2 lb
A
A
42.2 lb
40 lb
40 lb
40 lb
E
a
B
R
R
6 pulg
(b) Obtención de los diagramas de cuerpo libre
de los elementos.
8 pulg
Razonamiento crítico
En los problemas de este tipo, las reacciones sobre los elementos individuales del
bastidor pueden determinarse a partir de los diagramas de cuerpo libre de los elementos. ¿Por qué se dibujó el diagrama de cuerpo libre del bastidor completo y se
resolvieron las ecuaciones de equilibrio asociadas? La razón es que esto proporciona el inicio de la solución de las ecuaciones de equilibrio para los elementos. En
este ejemplo, cuando se dibujaron los diagramas de cuerpo libre de los elementos
ya se conocían las reacciones en A y en D, lo que simplificó el análisis restante. El
análisis de todo el bastidor también puede proporcionar una forma de verificar
el trabajo realizado. Observe que en este caso no se usaron las ecuaciones de equilibrio para el elemento ABCD. El análisis realizado puede verificarse al confirmar
que este elemento está en equilibrio (figura c):
兺Fx 42.2 lb 133.3 cos 36.9° lb 66.7 lb 40 lb 42.2 lb 0,
兺Fy 40 lb 133.3 sen 36.9° lb 40 lb 0,
兺Mpunto A (6 pulg)(133.3 cos 36.9° lb) (12 pulg)(66.7 lb)
(15 pulg)(40 lb) (18 pulg)(42.2 lb) 0.
D
42.2 lb
40 lb
66.7 lb
C
133.3 lb
40 lb
36.9
B
42.2 lb
66.7 lb C
E
36.9
40 lb
G
40 lb
133.3 lb
40 lb
A
40 lb
(c) Fuerzas sobre los elementos ABCD y CEG.
293
294
Capítulo 6 Estructuras en equilibrio
Ejemplo 6.8
Análisis de una máquina ( Relacionado con el problema 6.103)
¿Qué fuerzas se ejercen sobre la bola en E como resultado de las fuerzas de 150 N
que se aplican sobre las tenazas mostradas?
150 N
A
C
E
B
150 N
30 mm
70 mm
30 mm
D
30 mm
30 mm
Estrategia
Un par de pinzas es un ejemplo de una máquina simple, una estructura diseñada
para moverse y ejercer fuerzas. Las interconexiones de los elementos están diseñadas para obtener una ventaja mecánica, sometiendo un objeto a fuerzas mayores
que las ejercidas por el usuario.
En este caso no se puede obtener información del diagrama de cuerpo libre de
la estructura entera. Se deben determinar las fuerzas ejercidas sobre la bola dibujando diagramas de cuerpo libre de los elementos.
Solución
En la figura a se “desarman” las pinzas para obtener los diagramas de cuerpo
libre de los elementos marcados como (1), (2) y (3). En los diagramas de cuerpo libre (1) y (3), la fuerza R es ejercida por el elemento de dos fuerzas AB. El
ángulo a arctan(30兾70) 23.2°. El objetivo aquí es determinar la fuerza E
ejercida por la bola.
El diagrama de cuerpo libre del elemento (3) tiene sólo tres fuerzas desconocidas y la carga de 150 N, por lo que es posible determinar R, Dx y Dy a partir sólo
de este diagrama de cuerpo libre. Las ecuaciones de equilibrio son
兺Fx Dx R cos a 0,
兺Fy Dy R sen a 150 N 0,
兺Mpunto B (30 mm)Dy (100 mm)(150 N) 0.
Resolviendo estas ecuaciones se obtiene Dx 1517 N, Dy 500 N y R 1650 N.
Conociendo Dx se puede determinar E a partir del diagrama de cuerpo libre del elemento (2) sumando momentos respecto a C,
兺Mpunto C (30 mm)E (30 mm)Dx 0.
La fuerza ejercida por las pinzas sobre la bola es E Dx 1517 N. La ventaja
mecánica de las pinzas es (1517 N)兾(150 N) 10.1.
Problemas
30
mm
295
30
mm
100 mm
150 N
Cy
Cx
A
C
R
E
150 N
(1)
Cy
C
A
Cx
C
(2)
E
D
B
Dx
D
Dy
30
mm
(3)
150 N
Dy
R
D
B
100 mm
150 N
30
mm
Dx
30
mm
(a) Obtención de los diagramas de cuerpo libre de los elementos.
Razonamiento crítico
¿Cuál es la motivación para determinar las reacciones sobre los elementos de las
pinzas? Este proceso resulta esencial para el diseño de herramientas y máquinas.
Para diseñar la configuración de las pinzas y elegir los materiales y dimensiones
de sus elementos, es necesario determinar todas las fuerzas que actúan sobre éstos,
como se hizo en este ejemplo. Una vez que se conocen las fuerzas, pueden usarse
los métodos de mecánica de materiales para evaluar qué tan adecuados son los
elementos para soportar dichas fuerzas.
Problemas
Suponga que los objetos están en equilibrio. Al escribir
las respuestas, considere que las componentes x son
positivas hacia la derecha y que las componentes y
son positivas hacia arriba.
6.70 En el ejemplo activo 6.6, suponga que además de estar
cargado con el par de 200 N-m, el bastidor está sometido en C
a una fuerza de 400 N, la cual es horizontal y apunta hacia la
izquierda. Trace un bosquejo del bastidor mostrando las nuevas
cargas. Determine las fuerzas y los pares que actúan sobre el
elemento AB del bastidor.
6.71 En la figura, el objeto suspendido en E pesa 200 lb. Determine las reacciones sobre el elemento ACD en A y C.
D
3 pies
B
E
C
5 pies
A
4 pies
6 pies
Problema 6.71
296
Capítulo 6 Estructuras en equilibrio
6.72 En la figura, la masa del objeto suspendido en G es de 100 kg. Determine las reacciones sobre el elemento CDE en C y E.
E
B
F
G
800 mm
D
200 mm
A
C
400 mm
400 mm
800 mm
400 mm
Problema 6.72
6.73 Se tiene la fuerza F 10 kN. Determine las fuerzas sobre
el elemento ABC mostrado, presentando las respuestas como se
ilustra en la figura 6.25.
6.75 La tensión en el cable BD mostrado es de 500 lb. Determine
las reacciones en A para los casos (1) y (2).
G
E
F
G
E
D
6 pulg
D
A
C
B
A
1m
1m
2m
6 pulg
B
C
1m
300 lb
8 pulg
Problema 6.73
8 pulg
(1)
G
E
6.74 En el ejemplo 6.7, suponga que el bastidor se rediseñó
de manera que la distancia desde el punto C hasta el punto de
unión E del elemento de dos fuerzas BE se incrementó de 8 pulg a
10 pulg. Determine las fuerzas que actúan en C sobre el elemento
ABCD.
6 pulg
D
A
6 pulg
B
C
8 pulg
300 lb
8 pulg
(2)
Problema 6.75
Problemas
6.76 Determine las reacciones del elemento ABCD mostrado en
A, C y D.
B
A
6.79 El bastidor mostrado soporta una carga vertical de 6 kN en
C. Las barras ABC y DEF son horizontales. Determine las reacciones sobre el bastidor en A y D.
0.4 m
0.4 m
E
C
297
6 kN
1.0 m
C
B
A
0.5 m
600 N
0.4 m
D
E
F
D
0.8 m
0.4 m
Problema 6.79
0.4 m
0.6 m
0.4 m
Problema 6.76
6.77 Determine las fuerzas ejercidas sobre el elemento ABC
mostrado en A y C.
6.80 Se tiene la masa m 120 kg. Determine las fuerzas sobre
el elemento ABC mostrado, presentando sus respuestas como se
ilustra en la figura 6.25.
D
A
B
C
400 lb
2 pies
A
1 pie
B
300 mm
C
D
m
100 lb
1 pie
E
E
2 pies
2 pies
m
2 pies
200 mm
Problema 6.77
6.78 Una atleta se ejercita con el aparato de gimnasio que se
muestra en la figura. Para girar la barra ABD debe ejercer una
fuerza vertical en A tal que la fuerza axial en el elemento BC sea
de 1800 N. Cuando la barra ABD está a punto de girar, ¿cuáles
son las reacciones sobre la barra vertical CDE en D y E?
200 mm
Problema 6.80
6.81 Determine las reacciones sobre el elemento BCD que se
muestra en la figura.
30 lb
0.6 m
0.6 m
A
G
8 pulg
0.42 m
B
F
D
C
E
40 lb
D
8 pulg
C
8 pulg
B
A
1.65 m
18 pulg
12 pulg
8 pulg
Problema 6.81
E
Problema 6.78
298
Capítulo 6 Estructuras en equilibrio
6.82 El peso del objeto suspendido que se muestra en la figura
es W 50 lb. Determine la tensión en el resorte y la reacción
en F (el elemento ranurado DE es vertical).
6.85 Determine las fuerzas sobre el elemento ABC que se muestra
en la figura.
E
6 kN
A
B
1m
D
C
4 pulg
E
1m
6 pulg
W
A
C
B
2m
1m
2m
10 pulg
Problema 6.85
F
D
6.86 Determine las fuerzas sobre el elemento ABD mostrado.
8 pulg 8 pulg
10 pulg
10 pulg
8 pulg
Problema 6.82
8 pulg
A
60 lb
8 pulg
6.83 Se tiene la masa m 50 kg. La barra DE es horizontal.
Determine las fuerzas sobre el elemento ABCD mostrado, presentando sus respuestas como se ilustra en la figura 6.25.
D
60 lb
B
E
8 pulg
C
1m
8 pulg
D
1m
Problema 6.86
E
1m
6.87 La masa m que se muestra en la figura es de 12 kg. Determine las fuerzas sobre el elemento CDE.
C
m
1m
B
200 mm
1m
A
A
B
F
Problema 6.83
C
6.84 Determine las fuerzas sobre el elemento BCD mostrado.
D
200 mm
m
400 mm
6 pies
100 mm
E
200 mm
400 lb
A
Problema 6.87
B
4 pies
6.88 Se tiene el peso W 80 lb. Determine las fuerzas sobre el
elemento ABCD mostrado.
C
11 pulg
5 pulg
12 pulg
3 pulg
4 pies
E
D
B
A
C
D
8 pulg
8 pies
Problema 6.84
W
E
F
Problema 6.88
299
Problemas
6.89 En la figura, la mujer que está utilizando el aparato para
hacer ejercicio sostiene en reposo el peso de 80 lb en la posición mostrada. ¿Qué valor tienen las reacciones en el soporte
fijo E y en el soporte de pasador F? (A y C son conexiones de
pasador.)
2 pies
2 pulg
9 pulg
A
1 pie
6 pulg
2 pies
B
D
C
6.91 La masa del objeto suspendido que se muestra en la figura
es m 50 kg. Determine las reacciones sobre el elemento ABC.
0.2 m
A
B
0.6 m
60
E
D
C 0.2 m
0.8 m
0.6 m
m
6 pies
Problema 6.91
80 lb
6.92 La longitud del resorte sin estirar es L0. Demuestre que
cuando el sistema está en equilibrio, el ángulo a satisface la
relación: sen a 2(L0 2F兾k)兾L.
E
F
F
1
L
4
Problema 6.89
1
L
4
6.90 Determine las reacciones sobre el elemento ABC mostrado
en A y en B.
1
L
2
k
80 lb
E
a
9 pulg
B
a
Problema 6.92
6.93 En la figura, el soporte de pasador en B resistirá con seguridad una fuerza de 24 kN. Con base en este criterio, ¿cuál es la
masa m máxima que el bastidor puede soportar de manera segura?
C
C
8 pulg
D
A
500 mm
100 mm
13 pulg
4 pulg
Problema 6.90
E
D
B
300 mm
m
A
300 mm
400 mm
Problema 6.93
F
400 mm
300
Capítulo 6 Estructuras en equilibrio
6.94 Determine las reacciones en los puntos A y C mostrados.
C
A
6.97 Determine la fuerza ejercida sobre la bola por las tijeras y
encuentre la magnitud de la fuerza axial en el elemento de dos
fuerzas AB.
20 lb
3 pies
72 pies-lb
36 lb
3 pies
A
B
20 pulg
B
18 lb
4 pies
3
6
pulg pulg
8 pies
4
pulg
20 lb
Problema 6.94
Problema 6.97
6.95 Determine las fuerzas sobre el elemento AD mostrado.
200 N
130 mm
D
400 mm
400 N
C
A
6.98 La mujer ejerce fuerzas de 20 N sobre las pinzas según se
muestra en la figura.
a) ¿Cuál es la magnitud de las fuerzas que ejercen las pinzas
sobre el perno en B?
b) Determine la magnitud de las fuerzas que los elementos de las
pinzas ejercen entre sí en la conexión de pasador del punto C.
B
400 mm
400 mm
Problema 6.95
6.96 El bastidor mostrado se usa para soportar cables de alta tensión. Si b 3 pies, a 30° y W 200 lb, ¿qué valor tiene la
fuerza axial en el elemento HJ?
A
25 mm
80 mm
B
a
C
B
D
a
C
E
G
F
W
50 mm
H
a
I
a
45
J
20 N
W
W
b
b
b
Problema 6.96
b
20 N
Problema 6.98
Problemas
6.99 La figura a es un diagrama de los huesos y el músculo bíceps
del brazo de una persona que soporta una masa. La tensión en el
bíceps mantiene el antebrazo en posición horizontal, como se ilustra
en el sencillo modelo mecánico de la figura b. El peso del antebrazo
es de 9 N y la masa m 2 kg.
a) Determine la tensión en el músculo bíceps AB.
b) Determine la magnitud de la fuerza ejercida sobre la parte
superior del brazo por el antebrazo en la junta C del codo.
301
6.100 En la figura a se muestran los huesos y los tendones de la
pata de un caballo. En la figura b se muestra un modelo biomecánico de la misma pata. Si el caballo está en reposo y la fuerza normal ejercida por el suelo sobre su pata es N 1200 N, determine
las tensiones en el músculo flexor digital superficial BC y en el ligamento patelar DF.
6 cm
6 cm
6 cm
C
D
E
F
40 cm
A
B
3 cm
72 cm
B
N
290
mm
(a)
8 10 8
cm cm cm
(b)
(a)
A
Problema 6.100
50
mm
9N
m
200 mm
150 mm
(b)
C
6.101 La fuerza de presión ejercida sobre el pistón mostrado es
de 2 kN hacia la izquierda. Determine el par M necesario para
mantener el sistema en equilibrio.
6.102 En el problema 6.101, determine las fuerzas sobre el
elemento AB en A y en B.
Problema 6.99
B
300 mm
350 mm
45
A
M
C
400 mm
Problemas 6.101/6.102
6.103 En el ejemplo 6.8, suponga que el objeto que está
sostenido por las pinzas se mueve hacia la izquierda de manera
que la distancia horizontal desde D hasta el objeto en E disminuye de 30 mm a 20 mm. Trace un bosquejo de las pinzas
donde muestre la nueva posición del objeto. ¿Qué valor tienen
las fuerzas que se ejercen sobre el objeto en E como resultado
de las fuerzas de 150 N sobre las pinzas?
302
Capítulo 6 Estructuras en equilibrio
6.104 La pala de la excavadora que se muestra en la figura está sostenida mediante un soporte de pasador en E y el elemento de dos
fuerzas BC. El peso W de 300 lb de la pala actúa en el punto mostrado. Determine las reacciones sobre la pala en E y la magnitud de
la fuerza axial en el elemento de dos fuerzas BC.
6.105 La pala de la excavadora que se muestra en la figura tiene un soporte de pasador en E. La posición de la pala se controla
mediante el pistón hidráulico horizontal AB, que está unido a la pala a través de un eslabón de los elementos de dos fuerzas BC y BD.
El peso W 300 lb de la pala actúa en el punto mostrado. ¿Cuál es la magnitud de la fuerza que debe ejercer el pistón hidráulico
para mantener la pala en equilibrio?
Cilindro
hidráulico
Pala
15 pulg
A
B
3 pulg
E
C
12 pulg
D
12
7 20 pulg
pulg pulg
W
Problemas 6.104/6.105
6.106 La mujer de la figura ejerce fuerzas de 20 N sobre los mangos de las tijeras. Determine la magnitud de las fuerzas ejercidas
sobre la rama en A.
20 N
D
A
B
C
E
65 mm
Problema 6.106
20 N
303
Problemas
6.107 La persona de la figura ejerce fuerzas de 40 N sobre los
mangos de las pinzas de presión. Determine la magnitud de las
fuerzas que ejercen las pinzas sobre el perno en A.
6.108 Determine la magnitud de la fuerza que los elementos de
las pinzas de presión mostradas ejercen entre sí en el punto B y
encuentre la fuerza axial en el elemento de dos fuerzas DE.
6.110 El mecanismo que se muestra en la figura levanta una
carga W al extenderse el actuador hidráulico DE. Las barras AD
y BC tienen 4 pies de longitud y las distancias son b 2.5 pies y
h 1.5 pies. Si W 300 lb, ¿qué fuerza debe ejercer el actuador
DE para mantener la carga en equilibrio?
b
W
B
A
h
D
C
E
Problema 6.110
A
B
40 N
8 mm 40 mm
E
C
D
50 mm
30 mm
6.111 En mecanismo de cuatro barras que se muestra en la figura
opera la horquilla de un montacargas. La fuerza soportada por la
horquilla es W 8 kN. Determine las reacciones sobre el elemento
CDE.
0.7 m
0.15 m
75 mm
40 N
0.2 m
Problemas 6.107/6.108
W
6.109 El mecanismo que se muestra en la figura está diseñado
para ejercer una gran fuerza sobre la barra horizontal en A para
una operación de estampado. Si el cilindro hidráulico DE ejerce una
fuerza axial de 800 N y a 80°, ¿qué fuerza horizontal se ejerce
sobre la barra horizontal en A?
C
0.15 m
B
D E
Horquilla
0.2 m
0.3 m
A
F
90
D
A
m
a
0m
0.2 m
Problema 6.111
25
0
25
mm
B
25
0m
m
E
C
400 mm
Problema 6.109
304
Capítulo 6 Estructuras en equilibrio
6.112 Si la fuerza horizontal sobre la cuchara mostrada es F 2000 lb, ¿cuál la magnitud de la fuerza axial en el actuador hidráulico AC?
C
38 pulg
B
28 pulg
Cuchara
D
10 pulg
A
F
10 pulg 20 pulg 12 pulg
Problema 6.112
Problemas
305
6.113 Una fuerza horizontal de 10 kip actúa sobre la cubeta de la excavadora que se muestra en la figura. Determine las reacciones
sobre el elemento ACF en A y en F.
9 pies
2 pies
E
D
1 pie 4 pulg
2 pies
F
C
4 pies 4 pulg
A
1 pie 8 pulg
B
5 pies 6 pulg
Cubeta
2 pies
3 pies
10 kip
Problema 6.113
6.114 La estructura mostrada en el diagrama (una de las dos estructuras idénticas que sostienen la cuchara de la excavadora) soporta
una fuerza descendente F 1800 N en G. Los elementos BC y DH pueden tratarse como elementos de dos fuerzas. Determine las reacciones sobre el elemento CDK en K.
320
mm
Eje
100
mm
C
Pala
260
mm
H
260
mm
D
B
180
mm
J
160
mm
L
K
1040
mm
Problema 6.114
1120
mm
380
mm
200
mm
G
F
306
Capítulo 6 Estructuras en equilibrio
Problemas de repaso
6.115 En la figura, las cargas F1 440 N y F2 160 N.
Determine las fuerzas axiales en los elementos. Indique si están
en tensión (T) o en compresión (C).
F1
A
6.118 La armadura de puente Pratt que se muestra en la figura
soporta cargas en F, G y H. Determine las fuerzas axiales en los
elementos BC, BG y FG.
6.119 Para la armadura mostrada, determine las fuerzas axiales
en los elementos CD, GD y GH.
F2
B
C
D
400 mm
C
4m
E
A
200 mm
F
B
4m
G
H
60 kN
80 kN
20 kN
4m
4m
4m
700 mm
Problemas 6.118/6.119
Problema 6.115
6.116 La armadura mostrada soporta una carga F 10 kN.
Determine las fuerzas axiales en los elementos AB, AC y BC.
6.117 Cada elemento de la armadura soportará con seguridad una
fuerza de tensión de 40 kN y una fuerza de compresión de 32 kN.
Con base en este criterio, ¿cuál es la máxima carga descendente F
que puede aplicarse con seguridad en C?
6.120 La armadura mostrada soporta cargas en F y H. Determine
las fuerzas axiales en los elementos AB, AC, BC, BD, CD y CE.
6.121 Para la armadura mostrada, determine las fuerzas axiales
en los elementos EH y FH.
200 lb
F
100 lb
B
4 pulg
D
H
4 pulg B
3m
E
C
4 pulg
J
G
A
C
A
I
D
6 pulg
4m
3m
F
Problemas 6.116/6.117
6 pulg
6 pulg
Problemas 6.120/6.121
6 pulg
307
Problemas de repaso
6.122 Determine las fuerzas axiales en los elementos BD, CD y
CE mostrados.
6.123 Determine las fuerzas axiales en los elementos DF, EF y
EG mostrados.
10 kN
6.127 La armadura Howe que se muestra en la figura ayuda a
soportar un techo. Modele los soportes en A y G como soportes de
rodillo. Use el método de las juntas para determinar las fuerzas
axiales en los elementos BC, CD, CI y CJ.
6.128 Considere la armadura Howe que se muestra en la figura.
Use el método de secciones para determinar las fuerzas axiales en
los elementos CD, CJ e IJ.
A
2m
14 kN
6 kN
C
B
D
E
D
2 kN
2m
F
A
G
H
I
2m
I
2m
J
2m
K
2m
L
2m
Problemas 6.122/6.123
6.124 La armadura mostrada soporta una carga de 400 N en G.
Determine las fuerzas axiales en los elementos AC, CD y CF.
6.129 Un sistema de bocinas está suspendido de la armadura
mostrada mediante cables conectados en D y E. La masa del sistema de bocinas es de 130 kg y su peso actúa en G. Determine las
fuerzas axiales en los miembros BC y CD.
6.125 Determine las fuerzas axiales en los elementos CE, EF y
EH de la armadura mostrada.
6.126 ¿Cuáles de los elementos mostrados soportan las mayores
fuerzas de tensión y de compresión, y cuáles son sus valores?
400 N
E
0.5 m 0.5 m 0.5 m
0.5 m
1m
C
E
A
1m
G
B
D
300 mm
600 mm
H
G
F
D
B
300 mm 300 mm
2m
Problemas 6.127/6.128
6m
C
4m
F
B
2m
H
2 kN
E
C
G
A
4 kN
4 kN
2m
Problema 6.129
300 mm
Problemas 6.124–6.126
308
Capítulo 6 Estructuras en equilibrio
6.130 La masa del objeto suspendido que se muestra en la figura
es de 900 kg. Determine las fuerzas axiales en las barras AB y AC.
Estrategia: Dibuje el diagrama de cuerpo libre de la junta A.
6.132 En la figura, la masa m 120 kg. Determine las fuerzas
sobre el elemento ABC.
A
B
C
y
D (0, 4, 0) m
300 mm
D
A (3, 4, 4) m
m
E
B (0, 0, 3) m
C (4, 0, 0) m
x
200 mm
200 mm
z
Problema 6.132
Problema 6.130
6.131 Determine las fuerzas sobre el elemento ABC mostrado y
presente sus respuestas como lo hizo en la figura 6.25. Obtenga
los resultados de dos maneras:
a) Cuando dibuje los diagramas de cuerpo libre de los elementos
individuales, coloque la carga de 400 lb en el diagrama de cuerpo
libre del elemento ABC.
b) Cuando dibuje los diagramas de cuerpo libre de los elementos
individuales, coloque la carga de 400 lb en el diagrama de cuerpo
libre del elemento CD.
6.133 Determine las reacciones sobre el elemento ABC mostrado
en B y en C.
A
4 kN
0.2 m
2 kN-m
D
B
0.2 m
C
1 pie
1 pie
E
0.2 m
0.2 m
200 lb
Problema 6.133
D
C
400 lb
1 pie
B
1 pie
E
1 pie
F
A
6.134 Una camioneta y un remolque están estacionados sobre
una pendiente de 10°. El peso de 14,000 lb de la camioneta y el
peso de 8000 lb del remolque actúan en los puntos mostrados. Los
frenos de la camioneta evitan el giro de sus ruedas traseras en B.
Las ruedas frontales de la camioneta en C y las ruedas del remolque en A pueden girar libremente, lo que significa que éstas no
ejercen fuerzas de fricción sobre el camino. El enganche del remolque en D se comporta como un soporte de pasador. Determine
las fuerzas ejercidas sobre la camioneta en B, C y D.
2 pies
y
9 pies
14 pies
Problema 6.131
4 pies
3 pies
pulg
5 pies 6
s
ie
p
x
3
D
8 kip
6 pies
10
B
A
Problema 6.134
14 kip
C
Problemas de repaso
6.135 El peso de 600 lb de la cuchara mostrada actúa en un
punto que se encuentra 1 pie 6 pulg a la derecha de la línea
vertical CE. La línea ADE es horizontal. El actuador hidráulico
AB puede tratarse como un elemento de dos fuerzas. Determine
la fuerza axial en el actuador hidráulico AB y las fuerzas ejercidas
sobre la cuchara en C y en E.
309
6.136 Determine la fuerza ejercida por las pinzas cortadoras
mostradas en la figura sobre el perno.
6.137 Determine la magnitud de la fuerza que los elementos de
las pinzas cortadoras mostradas en la figura ejercen entre sí en la
conexión de pasador B y la fuerza axial en el elemento de dos
fuerzas CD.
100 N
B
C
2 pies
A
E
D
5 pies
1 pie 6 pulg
A
40 mm
C 55 mm
75 mm
B
D
1 pie 2 pies 6 pulg
Pala
Problema 6.135
90 mm 60 mm 65 mm
300 mm
100 N
Problemas 6.136/6.137
Proyecto de diseño 1 Diseñe una armadura para soportar la
base de un puente con un claro no soportado (ancho) de 8 m.
Haga estimaciones conservadoras de las cargas que la estructura
necesitará soportar si el camino sostenido por la armadura está
hecho de madera. Considere dos opciones: 1) Su cliente quiere
que el puente esté soportado por una armadura por debajo del
puente, de manera que la estructura no estorbe a la superficie
superior. 2) El cliente quiere que la armadura esté por encima
del puente y que esté diseñada de manera que sirva como pasamanos. Para cada opción use la estática para estimar las fuerzas
axiales máximas a las que estarán sometidos los elementos de la
estructura. Investigue diseños alternativos y compare las cargas
axiales resultantes.
G
300
mm
290
mm
390
mm
150 mm
F
480 mm
C
E
D
200 mm
B
A
8m
Proyecto de diseño 3 Vaya a un gimnasio y escoja un aparato
Zapatas de concreto
Proyecto de diseño 2 La armadura mostrada conecta un
extremo de una camilla a un helicóptero de rescate. Considere
diseños alternativos para la armadura que sostiene la camilla
en A y B y que está soportada en E y G. Compare las cargas
máximas en tensión y compresión en los elementos de su diseño
con las correspondientes de la armadura mostrada. Suponiendo
que el costo de una armadura es proporcional a la suma de las
longitudes de sus elementos, compare los costos de sus diseños
con los de la armadura que se muestra en la figura. Escriba un
reporte breve donde describa su análisis y recomiende el diseño
que escogería.
para hacer ejercicio que parezca mecánicamente interesante (por
ejemplo, que emplee pesos, poleas y palancas). Mida dimensiones
(mientras el aparato no esté en uso), haga bosquejos e incluso
tome fotografías para recopilar la información necesaria y analizar
el aparato. Use la estática para determinar el rango de fuerzas que
debe ejercer una persona al usar el aparato.
Sugiera cambios al diseño del aparato (diferentes a simplemente
incrementar los pesos) que aumenten la fuerza máxima que debe
ejercer el usuario.
Prepare un reporte breve en el que 1) describa el aparato original;
2) presente su modelo y análisis del aparato; 3) describa sus
propuestas de cambio y cualquier análisis que las soporten, y 4)
recomiende el cambio de diseño que escogería para incrementar
la fuerza máxima que debe emplear el usuario.
CAPÍTULO
7
Centroides y centros de masa
El peso de un objeto no actúa en un solo punto; se encuentra distribuido sobre el volumen total del cuerpo. En cualquier caso, el peso
puede representarse mediante una sola fuerza equivalente que actúa
en un punto llamado centro de masa. Cuando se usan las ecuaciones
de equilibrio para determinar las reacciones ejercidas sobre un objeto
por sus soportes, la ubicación del centro de masa debe conocerse si se
desea incluir el peso del objeto en el análisis. Los comportamientos
dinámicos de los objetos también dependen de las ubicaciones de sus
centros de masa. En este capítulo se define el centro de masa y se
muestra cómo determinarlo para varios tipos de objetos. También
se presentan definiciones que pueden interpretarse como las posiciones medias de áreas, volúmenes y líneas. Esas posiciones medias
se llaman centroides. Los centroides coinciden con los centros de
masa en clases particulares de objetos, pero también surgen en
muchas otras aplicaciones de la ingeniería.
Para estar en equilibrio, el centro de masa de la mujer —el punto en que
su peso actúa de manera efectiva— debe estar directamente por encima de
sus manos. En este capítulo se presenta el concepto de una posición media,
o centroide, y se muestra cómo localizar los centros de masa de los
objetos.
312
Capítulo 7 Centroides y centros de masa
7.1 Centroides de áreas
ANTECEDENTES
Suponga que desea determinar la posición media de un grupo de estudiantes en un
aula. Primero se introduce un sistema coordenado para poder expresar la posición
de cada estudiante. Por ejemplo, los ejes pueden alinearse con las paredes (figura
7.1a). Se numera a los estudiantes del 1 al N y se denota la posición del estudiante 1 con (x1, y1), la posición del estudiante 2 con (x2, y2), etcétera. La coordenada
x media, que se denotará por –x es la suma de sus coordenadas x dividida entre N;
esto es
y
x
a xi
x1 + x2 + Á + xN
i
x =
=
,
N
N
(a)
(7.1)
y
donde el símbolo a significa “suma en el rango de i”. La coordenada y media es
i
a yi
y =
y
i
N
(7.2)
.
x
x
(b)
Figura 7.1
(a) Grupo de estudiantes en un aula.
(b) Su posición media.
La posición media se indica mediante el símbolo mostrado en la figura 7.1b.
Ahora suponga que se reparten entre los estudiantes algunas monedas. Sea c1 el
número de monedas entregadas al estudiante 1, c2 el número de monedas dadas al
estudiante 2, y así sucesivamente. ¿Cuál es la posición media de las monedas en el
aula? Resulta claro que no puede ser igual que la posición media de los estudiantes.
Por ejemplo, si los estudiantes ubicados al frente del aula tienen más monedas, la
posición media de las monedas estará más cerca del frente del aula que la posición
media de los estudiantes.
Para determinar la coordenada x de la posición media de las monedas, es
necesario sumar las coordenadas x de las monedas y dividirlas entre el número de
monedas. La suma de las coordenadas x de las monedas puede obtenerse al multiplicar el número de monedas que tiene cada estudiante por la coordenada x del
estudiante y luego sumar los productos parciales. El número de monedas se puede
obtener sumando los números c1, c2, . . . . Por lo tanto, la coordenada x media de
las monedas es
a xi ci
x =
i
.
(7.3)
a ci
i
La coordenada y media de las monedas puede determinarse de la misma manera:
a yi ci
y =
i
.
(7.4)
a ci
i
Si se asignan otros significados a c1, c2, . . . , es posible determinar las posiciones
medias de otras medidas asociadas con los estudiantes. Por ejemplo, podría determinarse la posición media de sus edades o sus estaturas.
7.1 Centroides de áreas
y
y
AN
A
A2
A1
x
x
(a)
(b)
y
y
A
A
dA
_
y
y
x
x
_
x
x
(d)
(c)
De manera más general, las ecuaciones (7.3) y (7.4) pueden usarse para determinar la posición media de cualquier conjunto de cantidades a las que se puedan
asociar posiciones. Una posición media obtenida a partir de esas ecuaciones se
denomina posición media de peso ponderado o centroide. El “peso” asociado con
la posición (x1, y1) es c1, el peso asociado con la posición (x2, y2) es c2, y así sucesivamente. En las ecuaciones (7.1) y (7.2), el peso asociado con la posición
de cada estudiante es 1. Al realizar censos nacionales, el centroide de la población de un país —la posición promedio de la población— se determina de esta
manera.
Considere ahora un área A arbitraria en el plano x–y (figura 7.2a). Divida
el área en las partes A1, A2, . . . , AN (figura 7.2b) y denote las posiciones de las
partes mediante sus coordenadas (x1, y1), (x2, y2), . . . , (xN, yN). El centroide o
posición media del área puede obtenerse usando las ecuaciones (7.3) y (7.4) con
las áreas de las partes como los pesos:
a xi Ai
x =
i
a yi Ai
,
a Ai
y =
i
.
(7.5)
a Ai
i
i
Al llevar a cabo este procedimiento, surge la siguiente pregunta: ¿Cuáles son las
posiciones exactas de las áreas A1, A2, . . . , AN?. La incertidumbre en sus posiciones podría reducirse al dividir A en partes más pequeñas, pero aun así se obtendrían sólo valores aproximados para –x y –y . Para determinar la ubicación exacta del
centroide se debe tomar el límite cuando los tamaños de las partes tiendan a cero.
Este límite se obtiene reemplazando las ecuaciones (7.5) con las integrales
x =
LA
x dA
LA
,
dA
(7.6)
Figura 7.2
(a) Área A.
(b) División de A en N partes.
(c) Elemento diferencial de área dA con
coordenadas (x, y).
(d) Centroide del área.
313
314
Capítulo 7 Centroides y centros de masa
y =
LA
y dA
LA
,
(7.7)
dA
donde x e y son las coordenadas del elemento diferencial de área dA (figura 7.2c).
El subíndice A en el signo de integral significa que la integración se efectúa sobre
toda el área. En la figura 7.2d se muestra el centroide del área.
RESULTADOS
y
A
_
y
x
x
LA
LA
y
LA
LA
_
x
xdA
,
(7.6)
dA
Coordenadas del centroide, o posición
media de un área A en el plano x–y.
ydA
,
(7.7)
dA
Si se mantiene en mente que el centroide de un área es su posición media, a
menudo se facilita su localización. Si un área tiene simetría ìde espejo ”
respecto a un eje, su centroide se encuentra sobre el eje. Si un área es simétrica respecto a dos ejes, el centroide se encuentra en la intersección de éstos.
7.1 Centroides de áreas
Ejemplo activo 7.1
Centroide de un área por integración ( Relacionado con el problema 7.1)
Determine la coordenada x del centroide del área triangular que se muestra en la
figura.
y
h
x
b
Estrategia
Se evaluará la ecuación (7.6) usando un elemento de área dA en la forma de una “tira”
vertical de ancho dx.
Solución
y
dA
h
–x
b
x
b
x
LA
xdA
LA
dA
L0
x
b
h
xdx
b
h
xdx
L0 b
x3
3
h
b
h
b
2
x
1
h.
3
x
b
0
2 b
2
b.
3
La altura de una tira con ancho dx en la posición
x es (h/b)x, por lo que su área es dA (h/b)xdx.
Use esta expresión para evaluar la ecuación (7.6).
0
Problema de práctica Determine la coordenada y del centroide del área triangular
mostrada. Evalúe la ecuación (7.7) usando un elemento de área dA en la forma de una
“tira” vertical de ancho dx, y sea y la altura del punto medio de la tira.
Respuesta: y =
dx
315
316
Capítulo 7 Centroides y centros de masa
Ejemplo 7.2
Área definida por dos ecuaciones ( Relacionado con los problemas 7.2, 7.3)
y
Determine el centroide del área mostrada
(1, 1)
yx
y x2
x
Estrategia
Las coordenadas del centroide pueden determinarse usando un elemento de área en
la forma de una tira vertical, como se hizo en el ejemplo activo 7.1. En este caso la
tira debe definirse de manera que se extienda desde la curva inferior (y x2) hasta
la curva superior (y x).
Solución
Sea dA el área de la tira vertical de la figura a. La altura de la tira es x x2, por lo
que dA (x x2) dx. La coordenada x del centroide es
1
x =
LA
x dA
LA
=
dA
x1x - x 22 dx
L0
=
1
1x - x 22 dx
L0
c
y
c
x4 1
x3
d
3
4 0
2
3 1
x
x
d
2
3 0
=
1
.
2
y
(1, 1)
(1, 1)
x x2
x
1
(x x2)
2
x
dx
x
x
(a) Tira vertical de ancho dx.
La altura de la tira es
igual a la diferencia de
las dos funciones.
(b) Coordenada y del punto
medio de la tira.
La coordenada y del punto medio de la tira es x 2 + 21x - x 22 = 21x + x 22
(figura b). Al sustituir esta expresión por y en la ecuación (7.7) se obtiene la
coordenada y del centroide:
1
1
y =
LA
y dA
LA
=
dA
1
c 1x + x 22 d1x - x 22 dx
2
L0
1
L0
1x - x 22 dx
=
1
1 x3
x5 1
c
d
2 3
5 0
c
2
3 1
x
x
d
2
3 0
=
2
.
5
Razonamiento crítico
Observe la generalidad del enfoque usado en este ejemplo. El procedimiento mostrado puede usarse para determinar las coordenadas x e y del centroide de cualquier
área cuyas fronteras superior e inferior estén definidas por dos funciones.
Problemas
317
Problemas
7.1 En el ejemplo activo 7.1, suponga que el área triangular
está orientada de la manera que se muestra en la figura. Use integración para determinar las coordenadas x e y de su centroide (observe que ya se conocen las respuestas con base en el resultado del
ejemplo activo 7.1).
7.5 Determine las coordenadas del centroide del área mostrada.
y
y
6
2
3
h
x
9
Problema 7.5
x
b
Problema 7.1
7.2 En el ejemplo 7.2, suponga que el área se redefine como lo
muestra la figura. Determine la coordenada x del centroide.
7.6 Determine la coordenada x del centroide del área mostrada y
compare su respuesta con el valor dado en el apéndice B.
7.7 Determine la coordenada y del centroide del área mostrada y
compare su respuesta con el valor dado en el apéndice B.
y
7.3 En el ejemplo 7.2, suponga que el área se redefine como lo
muestra la figura. Determine la coordenada y del centroide.
y cxn
y
y1
0
(1, 1)
b
x
Problemas 7.6/7.7
y x2
7.8 Suponga que un estudiante de arte quiere pintar un panel de
madera como se muestra en la figura, con las líneas horizontales y
verticales pasando por el centroide del área pintada y le pide que
determine las coordenadas del centroide. ¿Cuáles son éstas?
y
x
Problemas 7.2/7.3
7.4 Determine el centroide del área mostrada
y x x3
y
y x2 x 1
0
1 pie
Problema 7.8
2
Problema 7.4
x
x
318
Capítulo 7 Centroides y centros de masa
7.9 Determine el valor de la constante c de manera que la coordenada y del centroide del área sea –y 2. ¿Cuál es la coordenada
x del centroide?
7.13 Determine las coordenadas del centroide del área mostrada.
y
y
y
1 2
x 4x 7
4
y5
y cx2
x
2
0
x
4
Problema 7.13
Problema 7.9
7.14 Determine la coordenada x del centroide del área mostrada.
7.10 Determine las coordenadas del centroide del área transversal
de la placa de metal que se muestra en la figura.
7.15 Determine la coordenada y del centroide del área mostrada.
y
y
1
y 4 x2 pies
4
y x3
yx
x
Problema 7.10
7.11 Un arquitecto desea construir una pared con el perfil mostrado. Para estimar los efectos de las cargas del viento, debe determinar
el área de la pared y las coordenadas de su centroide. ¿Cuáles son
estas coordenadas?
x
Problemas 7.14/7.15
4
7.16 Determine la componente x del centroide del área mostrada.
y (m)
3
y 2 0.02x
2
y
2
1
0
0
2
4
6
8
10
x (m)
Problema 7.11
7.12 Determine las coordenadas del centroide del área mostrada.
y
1
y x2 4x 7
4
y x2 x 1
2
Problema 7.16
x
Problema 7.12
x
Problemas
7.17 Determine la coordenada x del centroide del área mostrada.
7.18 Determine la coordenada y del centroide del área mostrada.
319
7.21 Un ingeniero agrónomo quiere medir la precipitación pluvial
en el centroide de un campo arado entre dos caminos. ¿Cuáles son
las coordenadas del punto donde se debe colocar el medidor?
y
y
y x2 20
0.5 mi
yx
x
0.3 mi
0.3 mi
x
0.6 mi
0.5 mi
0.2 mi
Problema 7.21
7.22 En la figura se muestra la sección transversal de un relleno
de tierra. Determine los coeficientes a y b para que la coordenada
y del centroide de la sección transversal sea de 10 m.
Problemas 7.17/7.18
7.19 ¿Cuál es la coordenada x del centroide del área mostrada?
y
y ax bx3
7.20 ¿Cuál es la coordenada y del centroide del área mostrada?
y
y
1 2
x 2x
6
x
100 m
Problema 7.22
2
x
6
2
Problemas 7.19/7.20
7.23 El avión Supermarine Spitfire usado por la Gran Bretaña
en la Segunda Guerra Mundial tenía un ala con un perfil elíptico.
Determine las coordenadas de su centroide.
y
x2
y2
2 1
2
a
b
x
2b
a
Problema 7.23
320
Capítulo 7 Centroides y centros de masa
7.25* Si R 6 y b 3, ¿cuál es la coordenada y del centroide
del área mostrada?
7.24 Determine las coordenadas del centroide del área mostrada.
Estrategia: Escriba la ecuación para el borde circular en la
forma y (R2 x2)12 y use una “tira” vertical con un ancho dx
como el elemento de área dA.
7.26* ¿Cuál es la coordenada x del centroide del área mostrada
en el problema 7.25?
y
y
R
R
x
x
Problema 7.24
b
Problemas 7.25/7.26
7.2 Áreas compuestas
ANTECEDENTES
Aunque los centroides de las áreas pueden determinarse por integración, el proceso se vuelve difícil y tedioso para áreas complicadas. En esta sección se describe
un enfoque más sencillo que puede usarse si un área consiste en una combinación
de áreas simples, la cual puede denominarse área compuesta. El centroide de un
área compuesta puede determinarse sin integración si se conocen los centroides de
sus partes.
El área compuesta de la figura 7.3a consiste en un triángulo, un rectángulo y
un semicírculo, que se llamarán partes 1, 2 y 3. La coordenada x del centroide del
área compuesta es
LA
x =
y
LA
1
2
3
x dA +
x dA +
x dA
LA1
LA2
LA3
x dA
=
dA
LA1
dA +
LA2
dA +
LA3
.
(7.8)
dA
En la figura 7.3b se muestran las coordenadas x de los centroides de las partes. A
partir de la ecuación para la coordenada x del centroide de la parte 1,
x
(a)
x1 =
y
1
2
LA1
x dA
LA1
3
,
dA
se obtiene
x
_
x1
_
x2
_
x3
x dA = x1 A1.
LA1
(b)
Figura 7.3
(a) Área compuesta por tres áreas simples.
(b) Centroides de las partes
Usando esta ecuación y expresiones equivalentes para las partes 2 y 3, se puede
escribir la ecuación (7.8) como
x =
x1 A1 + x2 A2 + x3 A3
.
A1 + A2 + A3
7.2 Áreas compuestas
y
y
y
1
2
x
_
x1
x
(c)
(b)
(a)
Figura 7.4
(a) Área con un recorte.
(b) Área triangular
(c) Área del recorte.
Se ha obtenido una ecuación para la coordenada x del área compuesta en términos
de las áreas de sus partes. Las coordenadas del centroide de un área compuesta con
un número arbitrario de partes son
a xi Ai
x =
i
a yi Ai
,
y =
a Ai
i
.
(7.9)
a Ai
i
i
Cuando un área se puede dividir en partes cuyos centroides son conocidos, es
posible usar esas expresiones para determinar su centroide. En el apéndice B se
tabulan los centroides de algunas áreas simples.
El análisis del centroide de un área se inició dividiéndola en partes finitas
y planteando ecuaciones para su posición de pesos ponderados. Los resultados,
ecuaciones (7.5), son aproximados debido a la incertidumbre en las posiciones de
las partes del área. Las ecuaciones (7.9) exactas son idénticas excepto porque las
posiciones de las partes son sus centroides.
El área de la figura 7.4a consiste en un área triangular con un agujero o
recorte circular. Si se designa el área triangular (sin el corte) como parte 1 del
área compuesta (figura 7.4b) y el área del recorte como parte 2 (figura 7.4c), se
obtiene la coordenada x del centroide del área compuesta:
x =
x dA x dA
LA1
LA2
LA1
dA -
LA2
dA
=
x
_
x2
x1 A1 - x2 A2
.
A1 - A2
Esta ecuación es idéntica en forma a la primera de las ecuaciones (7.9) excepto porque los términos correspondientes al recorte son negativos. Como lo demuestra este
ejemplo, se pueden usar las ecuaciones (7.9) para determinar los centroides de áreas
compuestas que contengan recortes, tratando éstos como áreas negativas.
Se observa que la determinación del centroide de un área compuesta requiere
de tres pasos:
1. Escoger las partes. Trate de dividir el área compuesta en partes cuyos centroides se conozcan o puedan determinarse con facilidad.
2. Determinar los valores para las partes. Determine el centroide y el área de
cada parte. Vea si hay relaciones de simetría que puedan simplificar la tarea.
3. Calcular el centroide. Use las ecuaciones (7.9) para determinar el centroide
del área compuesta.
321
322
Capítulo 7 Centroides y centros de masa
RESULTADOS
x
iAi
x1A1 x2A2 x
i
A1 A2 Ai
i
(7.9)
y
yiAi
y1A1 y2A2 i
A1 A2 Ai
Las coordenadas del centroide de un
área compuesta consistente en las
partes 1, 2, .... El término Ai es el
área de la i-ésima parte y xi, yi son las
coordenadas del centroide de Ai.
i
Si un área contiene un agujero o recorte, el centroide del área puede determinarse a partir de las ecuaciones (7.9) tratando al recorte como un área negativa.
y
Área triangular con un recorte circular.
x
y
El área triangular sin el recorte. Sea A1
su área y x1 la coordenada x de su
centroide.
1
x
_
x1
y
El área del recorte circular. Sea A2
su área y x2 la coordenada x de su
centroide.
2
x
_
x2
La coordenada x del centroide del
área triangular con el recorte es
x1A1 x2A2
.
x
A1 A2
7.2 Áreas compuestas
Centroide de un área compuesta ( Relacionado con el problema 7.27)
Ejemplo activo 7.3
Determine la coordenada x del centroide del área compuesta que se muestra en la
figura.
y
R
Estrategia
El área debe dividirse en partes sencillas (en este ejemplo las partes resultan obvias),
después se determinarán las áreas y las ubicaciones de los centroides de las partes y
se aplicará la ecuación (7.9)1.
x
b
c
Solución
y
1
Selección de las partes
Dividida el área en partes sencillas. Se
muestran las coordenadas x de los
centroides de las partes.
2
2
b
3
1
b c
2
4R
bc
3p
3
x
Determinación de los valores de las partes
Tabule los términos necesarios para aplicar la
ecuación (7.9)1. Vea el apéndice B.
Parte 1 (triángulo)
xi
Ai
2
b
3
1
b(2R)
2
b
Parte 2 (rectánuglo)
1
c
2
Parte 3 (semicírculo) b c x
4R
3p
xi Ai
c(2R)
1
pR2
2
23 b 12 b(2R) b 12 c [c(2R)]
1
4R
b c 3p
2 pR 2
x1A1 x2A2 x3A3
A1 A2 A3
1
1
4R
2 pR 23 b 12 b(2R) b 2 c [c(2R)] b c 3p
2
1
1
b(2R) c(2R) pR2
2
2
Problema de práctica Determine la coordenada y del centroide del área compuesta.
Respuesta: y =
323
C 13(2R) D C 21 b(2R) D + R C c(2R) D + R A 21 pR2 B
1
2 b(2R)
+ c(2R) + 21 pR2
.
Cálculo del centroide
Use la ecuación (7.9)1 para
determinar la componente x
del centroide.
324
Capítulo 7 Centroides y centros de masa
Ejemplo 7.4
Centroide de un área con un recorte ( Relacionado con el problema 7.28)
Determine el centroide del área mostrada.
y
100 mm
Estrategia
En vez de intentar la división del área en partes, un método más simple es considerarla como compuesta por un área rectangular con un recorte semicircular. Luego
puede aplicarse la ecuación (7.9) tratando el recorte como un área negativa.
140 mm
x
140 mm
Solución
Selección de las partes El rectángulo sin el recorte semicircular y el área del
recorte se llamarán parte 1 y parte 2, respectivamente (figura a).
y
200 mm
y
200 mm
1
100 mm
2
x
_
x1
(a) Rectángulo y recorte
semicircular
Determinación de los valores de las partes
x del centroide del recorte es
x2 =
x
_
x2
Según el apéndice B, la coordenada
411002
4R
=
mm.
3p
3p
En la tabla siguiente se resume la información para determinar la coordenada x del
centroide. Observe que el recorte se trata como un área negativa.
Información para determinar –x
Parte 1 (rectángulo)
Parte 2 (recorte)
Cálculo del centroide
x1 A1 + x2 A2
x =
=
A1 + A2
x–i (mm)
Ai (mm2)
x–i Ai (mm3)
100
(200)(280)
411002
- 21 p110022
(100)[(200)(280)]
411002 1
C p110022 D
3p 2
3p
La coordenada x del centroide es
11002[1200212802] -
411002
3p
C 21 p110022 D
1200212802 - 21 p110022
= 122 mm
Debido a la simetría del área, –y 0.
Razonamiento crítico
Si se tratara de dividir el área en partes sencillas, se tendría un mayor aprecio por
el método que acaba de emplearse. El centroide se pudo determinar tratando con
dos áreas sencillas, el área rectangular sin el recorte y el área del recorte semicircular. A menudo, la determinación de centroides de áreas puede simplificarse
de esta manera.
Problemas
Problemas
y
7.27 En el ejemplo activo 7.3, suponga que el área se coloca
en la forma mostrada. Sean las dimensiones R 6 pulg, c 14
pulg y b 18 pulg. Use la ecuación (7.9)1 para determinar la
coordenada x del centroide.
10 pulg
y
x
R
x
b
c
20 pulg
Problema 7.27
7.28 En el ejemplo 7.4, suponga que al área se le hace un segundo recorte semicircular como se muestra en la figura. Determine la coordenada x del centroide.
Problema 7.30
y
y
100 mm
0.8 m
140 mm
x
50 mm
140 mm
x
0.6 m
200 mm
1.0 m
Problema 7.28
Problema 7.31
En los problemas 7.29 a 7.36, determine las coordenadas
de los centroides
y
y
30 pulg
2 pulg
8 pulg
40 pulg
3 pulg
x
x
20 pulg
4 pulg
6 pulg
10 pulg
Problema 7.29
Problema 7.32
325
326
Capítulo 7 Centroides y centros de masa
y
7.37 En la figura se tienen las dimensiones b 42 mm y
h 22 mm. Determine la coordenada y del centroide de la sección transversal de la viga mostrada.
7.38 Si el área de la sección transversal de la viga mostrada es de
8400 mm2 y la coordenada y del centroide del área es –y 90 mm,
¿qué valores tienen las dimensiones b y h?
400
mm
y
300 mm
x
300
mm
Problema 7.33
300
mm
200 mm
h
y
120 mm
x
2 pies
b
Problemas 7.37/7.38
3 pies
x
4 pies
Problema 7.34
7.39 Determine la coordenada y del centroide de la sección transversal de la viga mostrada.
y
y
20 mm
5 pulg
2 pulg
30 mm
20 mm
10
mm
8 pulg
30 mm
x
x
90 mm
Problema 7.35
3
pulg
5 pulg
5 pulg
3
pulg
Problema 7.39
y
7.40 Determine las coordenadas del centroide del estabilizador
vertical del avión que se muestra en la figura.
5 mm
y
15 mm
50 mm
11 m
5 mm
5 mm
x
x
70
12.5 m
15 mm
Problema 7.36
48
15 mm
10 15 15 10
mm mm mm mm
Problema 7.40
7.3 Cargas distribuidas
7.41 El área mostrada tiene bordes elípticos. Si a 30 mm,
b 15 mm y e 6 mm, ¿cuál es la coordenada x del centroide
del área?
327
7.43 Se muestran las tres velas de un velero New York. Las
coordenadas de los puntos est·n en pies. Determine el centroide
de la vela 1.
7.44 Determine el centroide de la vela 2.
7.42 Determine la coordenada x del centroide del área mostrada
en el problema 7.41 en términos de a, b y e, y evalúe su límite
cuando e S 0; con esto demuestre que la coordenada x del centroide de un cuarto de elipse es
x =
4a1a + 2b2
3p1a + b2
7.45 Determine el centroide de la vela 3.
.
y
1
2
3
(a)
´
y
y
b
y
(14, 29)
(12.5, 23)
(20, 21)
(3, 20)
(3.5, 21)
x
a
´
1
2
(16, 0)
Problemas 7.41/7.42
x
3
(10, 0)
x
(23, 0)
x
(b)
Problemas 7.43–7.45
7.3 Cargas distribuidas
ANTECEDENTES
La carga ejercida sobre una viga (larguero) que soporta el piso de un edificio
está distribuida sobre la longitud de la viga (figura 7.5a). La carga ejercida por
el viento sobre una torre de televisión está distribuida a lo largo de la altura de
la torre (figura 7.5b). En muchas aplicaciones de ingeniería, las cargas están
distribuidas en forma continua a lo largo de líneas. En esta sección se mostrará
que el concepto del centroide de un área puede ser útil en el análisis de objetos
sometidos a dichas cargas.
(a)
(b)
Figura 7.5
Ejemplos de fuerzas distribuidas:
(a) Carga uniformemente distribuida, ejercida
por el piso sobre una viga de la estructura
de un edificio.
(b) Carga del viento distribuida a lo largo de la
altura de una torre.
328
Capítulo 7 Centroides y centros de masa
Descripción de una carga distribuida
y
x
(a)
y
w
x
(b)
Figura 7.6
(a) Carga de una viga con sacos de arena.
(b) La carga distribuida w representa la carga
ejercida por los sacos.
Se puede usar un ejemplo sencillo para demostrar cómo se expresan de manera
analítica este tipo de cargas. Suponga que se apilan sacos de arena sobre una
viga, como se muestra en la figura 7.6a. Resulta claro que la carga ejercida por
los sacos se distribuye sobre la longitud de la viga, y su magnitud en una posición x dada depende de qué tan alto estén apilados los sacos en esa posición.
Para describir la carga, se define una función w tal que la fuerza descendente
sobre un elemento infinitesimal dx de la viga es w dx. Con esta función es posible representar la magnitud variable de la carga ejercida por los sacos de arena
(figura 7.6b). Las flechas indican que la carga actúa hacia abajo. Las cargas distribuidas en líneas, desde los casos más simples como el del propio peso de una
viga, hasta los más complicados como la carga de sustentación distribuida a lo
largo del ala de un avión, se modelan mediante la función w. Como el producto
de w y dx es una fuerza, las dimensiones de w son (fuerza)(longitud), y w se
puede expresar en newtons por metros en unidades del SI y en libras por pie en
unidades de uso común en Estados Unidos.
Determinación de la fuerza y el momento
Suponga que se conoce la función w que describe una carga distribuida particular
(figura 7.7a). La gráfica de w se llama curva de carga. Como la fuerza actúa sobre
un elemento dx de la línea es w dx, es posible determinar la fuerza F ejercida por
la carga distribuida integrando la curva de carga con respecto a x:
F =
LL
w dx.
(7.10)
También es posible integrar para determinar el momento respecto a un punto ejercido por la carga distribuida. Por ejemplo, el momento respecto al origen debido
a la fuerza ejercida sobre el elemento dx es xw dx, por lo que el momento total
respecto al origen debido a la carga distribuida es
M =
LL
xw dx.
(7.11)
y
w
x
x
dx
w dx
Cuando sólo se tiene interés en la fuerza total y el momento total ejercidos por
una carga distribuida, ésta se puede representar con una sola fuerza equivalente F
(figura 7.7b). Para que sea equivalente, la fuerza debe actuar en una posición –x
sobre el eje x tal que el momento de F respecto al origen sea igual al momento de
la carga distribuida respecto al origen:
(a)
xF =
y
F
_
x
x
LL
xw dx.
Por consiguiente, la fuerza F es equivalente a la carga distribuida si ésta se coloca
en la posición
(b)
Figura 7.7
(a) Una carga distribuida y la fuerza ejercida
sobre un elemento diferencial dx.
(b) La fuerza equivalente.
x =
LL
xw dx
LL
.
w dx
(7.12)
7.3 Cargas distribuidas
329
Analogía del área
Observe que el término w dx es igual a un elemento de “área” dA entre la curva de
carga y el eje x (figura 7.8a) (se utilizan comillas porque w dx es en realidad una
fuerza y no un área). Interpretada de esta manera, la ecuación (7.10) establece que
la fuerza total ejercida por la carga distribuida es igual al “área” A entre la curva
de carga y el eje x:
y
w
dA w dx
x
x
dx
(a)
F =
LL
w dx =
LA
dA = A.
(7.13)
y
FA
A
Sustituyendo w dx dA en la ecuación (7.12), se obtiene
x
x =
LL
xw dx
LL
=
w dx
LA
(b)
x dA
LA
.
(7.14)
dA
La fuerza F es equivalente a la carga distribuida si actúa en el centroide del “área”
entre la curva de carga y el eje x (figura 7.8b). El uso de esta analogía para representar una carga distribuida mediante una fuerza equivalente puede ser muy útil
cuando la curva de carga es relativamente simple.
Figura 7.8
(a) Determinación del “área” entre la función
w y el eje x.
(b) La fuerza equivalente es igual al “área”, y
la línea de acción pasa por su centroide.
RESULTADOS
y
w
x
x
dx
Para representar una carga que se distribuye a lo largo del
eje x, se define una función w tal que la fuerza
descendente sobre un elemento dx del eje x sea w dx. La
gráfica de w se llama curva de carga.
w dx
F
M
w dx,
(7.10)
xw dx,
(7.11)
LL
L
L
y
La fuerza total descendente y el momento horario
total respecto al origen debido a la carga
distribuida w que actúa sobre un intervalo L del
eje x pueden determinarse por integración.
FA
A
x
La fuerza total descendente F debida a una carga
distribuida es igual al “área” A entre la curva de
carga y el eje x. Cuando dicha fuerza se representa
mediante un vector, éste es equivalente a la carga
distribuida si se coloca en el centroide del “área”.
(Es decir, el momento horario respecto al origen
debido al vector de fuerza es igual a M.) Lo
anterior se denomina analogía del área.
330
Capítulo 7 Centroides y centros de masa
Ejemplo activo 7.5
Viga con una carga distribuida ( Relacionado con el problema 7.46)
La viga de la figura está sometida a una carga distribuida “triangular” cuyo valor
en B es de 100 N/m (es decir, la función w se incrementa linealmente de w 0 en
A hasta w 100 N/m en B). Determine las reacciones de la viga en A y B.
100 N/m
A
B
12 m
Estrategia
Es posible usar la analogía del área para representar la carga distribuida mediante
una fuerza equivalente. Luego se pueden aplicar las ecuaciones de equilibrio para
determinar las reacciones en A y B.
Solución
y
El “área” de la carga distribuida triangular es
igual a un medio de su base por su altura, o
1
(12
2
2
(12 m)
3 8 m
m) (100 N/m) 600 N.
El centroide del “área” triangular está en
2 2
x (12 m) 8 m.
3 3
1
(12 m)(100 N/m)
2
600 N
x
Ax
Ay
B
12 m
Fx Ax 0,
Fy Ay B 600 N 0,
Mpunto A (12 m)B (8 m)(600 N) 0.
Aplique el equilibrio.
Resolviendo se obtiene Ax 0,
Ay 200 N, y B 400 N.
Problema de práctica a) Determine w como una función de x para la carga triangular distribuida en este ejemplo. b) Use las ecuaciones (7.10) y (7.11) para determinar
la fuerza descendente total y el momento horario total respecto al extremo izquierdo
de la viga debido a la carga triangular distribuida.
Respuesta: a) w =
100
x N/m. b) F 600 N, M 4800 N-m.
12
331
7.3 Cargas distribuidas
Ejemplo 7.6
Viga sometida a cargas distribuidas ( Relacionado con el problema 7.48)
La viga que se muestra en la figura está sometida a dos cargas distribuidas. Determine las reacciones en A y B.
400 N/m
6m
800 N/m
A
6m
400 N/m
B
6m
Estrategia
En este caso puede aplicarse con facilidad la analogía del área a la carga uniformemente distribuida entre A y B. Se tratará a la carga distribuida sobre la sección vertical de la viga como la suma de cargas uniforme y triangular, y se usará la analogía
del área para representar cada carga distribuida mediante una fuerza equivalente.
y
6m
400 N/m
x
Solución
En la figura a se dibuja el diagrama de cuerpo libre de la viga, expresando la carga
distribuida a la izquierda como la suma de cargas uniforme y triangular. En la figura b se representan las tres cargas mediante fuerzas equivalentes. El “área” de
la carga distribuida uniforme a la derecha es (6 m) (400 N/m) 2400 N, y su
centroide está a 3 m de B. El área de la carga distribuida uniforme sobre la parte
vertical de la viga es (6 m) (400 N/m) 2400 N y su centroide está en y 3 m.
El área de la carga distribuida triangular es –12 (6 m) (400 N/m) 1200 N y su
centroide se ubica en y –12 (6 m) 2 m.
A partir de las ecuaciones de equilibrio
Fx Ax 1200 N 2400 N 0,
Fy Ay B 2400 N 0,
Mpunto A (6 m)B (3 m)(2400 N) (2 m)(1200 N) (3 m)(2400 N) 0,
se obtiene Ax 3600 N, Ay 400 N y B 2800 N.
Razonamiento crítico
Cuando se analiza un problema que implica cargas distribuidas, ¿debería usarse
siempre la analogía del área para representar las cargas como se hizo en este ejemplo? La analogía del área es útil cuando una curva de carga es suficientemente simple para que su área y la ubicación de su centroide sean fáciles de determinar. Cuando
no se da este caso, pueden usarse las ecuaciones (7.10) y (7.11) para determinar la
fuerza y el momento ejercidos por una carga distribuida. Este enfoque se ilustra en
el ejemplo 7.7.
400
N/m
Ax
400
N/m
Ay
6m
B
6m
(a) Diagrama de cuerpo libre de la viga.
y
2400 N
1200 N
2m
2400 N
3m
3m
Ax
6m
x
Ay
B
6m
(b) Representación de las cargas distribuidas
mediante fuerzas equivalentes.
332
Capítulo 7 Centroides y centros de masa
Ejemplo 7.7
Viga con una carga distribuida ( Relacionado con el problema 7.49)
La viga que se muestra en la figura está sometida a una carga distribuida, a una
fuerza y a un par. La carga distribuida es w 300x 50x2 0.3x4 lb/pie. Determine las reacciones en el soporte fijo A.
y
2000 lb
w
10,000 pies-lb
x
A
10 pies
10 pies
Estrategia
Como se conoce la función w, pueden usarse las ecuaciones (7.10) y (7.11) para
determinar la fuerza y el momento ejercidos sobre la viga por la carga distribuida. Después pueden emplearse las ecuaciones de equilibrio para determinar las
reacciones en A.
Solución
En la figura a se aísla la viga y se muestran las reacciones en el soporte fijo. La
fuerza descendente ejercida por la carga distribuida es
10
3
w dx =
L
L0
1300x - 50x 2 + 0.3x 42 dx = 4330 lb.
El momento horario respecto al punto A ejercido por la carga distribuida es
10
3
xw dx =
L
x1300x - 50x 2 + 0.3x 42 dx = 25,000 ft-lb.
pies-lb.
L0
A partir de las ecuaciones de equilibrio
Fx Ax 0,
Fy Ay 4330 lb 2000 lb 0,
Mpunto A MA 25,000 pies-lb (20 pies)(2000 lb) 10,000 pies-lb 0,
se obtiene Ax 0, Ay 2330 lb y MA 25,000 pies-lb.
y
2000 lb
w
MA
Ax
10,000 pies-lb
x
A
Ay
10 pies
10 pies
(a) Diagrama de cuerpo libre de la viga.
Razonamiento crítico
Cuando se utiliza la ecuación (7.11), es importante tener en cuenta que se está calculando el momento horario debido a la carga distribuida w respecto al origen x 0.
333
Problemas
Problemas
7.46 En el ejemplo activo 7.5 suponga que la carga distribuida
se modifica como se indica en la figura. Determine las reacciones
sobre la viga en A y en B.
7.50 Determine las reacciones en el soporte fijo A que se muestra
en la figura.
y
60 N/m
A
w 3(1 x2/25) kN/m
B
8m
4m
Problema 7.46
A
5m
Problema 7.50
7.47 Determine las reacciones en los puntos A y B de la figura.
6 pies
200 lb/pie
B
A
6 pies
4 pies
x
7.51 Un ingeniero mide las fuerzas ejercidas por el suelo sobre
una sección de 10 m de la cimentación de un edificio y encuentra que dichas fuerzas están descritas por la carga distribuida
w 10x x2 0.2x3 kN/m.
a) Determine la magnitud de la fuerza total ejercida sobre la cimentación por la carga distribuida.
b) Determine la magnitud del momento respecto a A debido a la
carga distribuida.
y
200 lb/pie
Problema 7.47
2m
10 m
A
x
7.48 En el ejemplo 7.6, suponga que las cargas distribuidas se
modifican como se indica en la figura. Determine las reacciones
sobre la viga en A y en B.
400 N/m
Problema 7.51
6m
600 N/m
A
6m
400 N/m
B
7.52 Determine las reacciones sobre la viga mostrada en A y en B.
6m
Problema 7.48
3 kN/m
2 kN/m
A
7.49 En el ejemplo 7.7, suponga que la carga distribuida que
actúa sobre la viga desde x 0 hasta x 10 pies está dada por
w 350 0.3x3 lb/pie. a) Determine la fuerza descendente y el
momento horario respecto a A ejercido por la carga distribuida.
b) Determine las reacciones en el soporte fijo.
B
4m
Problema 7.52
2m
334
Capítulo 7 Centroides y centros de masa
7.53 La fuerza de sustentación aerodinámica del ala que se
muestra en la figura está descrita por la carga distribuida
w = - 300 21 - 0.04x2 N/m. La masa del ala es de 27 kg y su
centro de masa está ubicado a 2 m del punto R en la raíz del ala.
a) Determine las magnitudes de la fuerza y el momento respecto a
R ejercidos por la fuerza de sustentación del ala.
b) Determine las reacciones sobre el ala en R.
7.54 Determine las reacciones sobre la barra AB mostrada en A y
en B.
400 lb/pie
B
y
2 pies
y
600 lb/pie
400 lb/pie
2 pies
x
R
4 pies
x
2m
A
4 pies
Problema 7.54
5m
Problema 7.53
7.55 Determine las reacciones sobre el elemento AB en A y en B.
300 lb/pie
A
B
6 pies
6 pies
6 pies
C
300 lb/pie
Problema 7.55
7.56 Determine las fuerzas axiales en los elementos BD, CD y CE de la armadura mostrada e indique si están en tensión (T) o en
compresión (C).
2m
2m
B
A
2m
D
2m
H
F
2m
C
E
G
4 kN/m
8 kN/m
Problema 7.56
7.4 Centroides de volúmenes y líneas
7.57 Determine las reacciones sobre el elemento ABC mostrado
en A y en B.
7.58 Determine las fuerzas sobre el elemento ABC del bastidor
que se muestra en la figura.
A
400 N/m
200 N/m
1m
160 mm
1m
3 kN/m
C
B
C
B
2m
D
240 mm
400 N/m
160
mm
160
mm
160
mm
Problema 7.57
7.4 Centroides de volúmenes y líneas
ANTECEDENTES
En esta sección se definen los centroides, o posiciones promedio, de volúmenes y
líneas, y se muestra cómo determinar los centroides de volúmenes y líneas compuestos. En la sección 7.7 se demostrará que si se conocen los centroides de volúmenes y líneas es posible determinar los centros de masa de ciertos tipos de objetos,
mediante los cuales se sabe dónde actúan de manera efectiva sus pesos.
Volúmenes Considere un volumen V, y sea dV un elemento diferencial de V
con coordenadas x, y y z (figura 7.9). Por analogía con las ecuaciones (7.6) y (7.7),
las coordenadas del centroide de V son
LV
x dV
LV
,
y =
dV
LV
y dV
LV
,
z =
dV
LV
z dV
LV
.
(7.15)
dV
El subíndice V en la integral significa que la integración se lleva a cabo sobre todo
el volumen.
y
dV
y
x
z
z
x
Figura 7.9
Volumen V y elemento diferencial dV.
2m
Problema 7.58
E
A
x =
335
1m
336
Capítulo 7 Centroides y centros de masa
A
Vista frontal
Vista lateral
(a)
y
y
dV
dA
T
y
x z
x
(b)
Figura 7.10
(a) Volumen de espesor uniforme.
(b) Obtención de dV proyectando dA a través
del volumen.
Si un volumen tiene la forma de una placa con espesor uniforme y área A de
sección transversal (figura 7.10a), su centroide coincide con el de A y se encuentra
en el punto medio entre las dos caras. Para demostrar que esto es cierto, se obtiene
un elemento de volumen dV proyectando un elemento dA del área de la sección
transversal a través del espesor T del volumen, de manera que dV T dA (figura
7.10b). Entonces, las coordenadas x e y del centroide del volumen son
x =
LV
x dV
=
y =
xT dA
=
dV
LA
y dV
LA
LV
LV
LA
LV
=
dV
LA
x dA
,
T dA
LA
yT dA
LA
LA
=
T dA
dA
y dA
LA
.
dA
Por simetría, la coordenada –z 0. Por lo tanto, el centroide de este tipo de volumen se conoce si se sabe cuál es (o es posible determinar) el centroide del área de
su sección transversal.
y
L
Líneas Las coordenadas del centroide de una línea L son
dL
y
x
z
x
x =
LL
x dL
LL
,
dL
y =
LL
y dL
LL
,
dL
z =
LL
z dL
LL
,
(7.16)
dL
z
Figura 7.11
Línea L y elemento diferencial dL.
donde dL es una longitud diferencial de la línea con coordenadas x, y y z. (Figura
7.11).
7.4 Centroides de volúmenes y líneas
RESULTADOS
y
dV
x
LV
,
LV
y
LV
z
dV
x
z
,
x
z
y dV
LV
LV
y
x dV
Coordenadas del centroide de
un volumen V.
(7.15)
dV
z dV
.
LV
dV
Si un volumen tiene la forma de una
placa con espesor uniforme y área A de
sección transversal, su centroide
coincide con el centroide de A y está en
el punto medio entre las dos caras.
A
Vista frontal
Vista lateral
y
L
dL
y
x
LL
x dL
LL
y
LL
z
x
dL
z
y dL
,
LL
LL
x
z
,
dL
z dL
LL
.
dL
(7.16)
Coordenadas del centroide de
una línea L.
337
338
Capítulo 7 Centroides y centros de masa
Centroide de un cono por integración ( Relacionado con el problema 7.59)
Ejemplo activo 7.8
Determine el centroide del cono que se muestra en la figura.
y
z
R
x
h
Estrategia
Debido a la simetría axial del cono, el centroide debe encontrarse sobre el eje x. Se
determinará la coordenada x del centroide mediante la aplicación de la ecuación
(7.15)1, usando un elemento de volumen dV en forma de un disco con espesor dx.
Solución
y
dV
Elemento de volumen en
la forma de un disco.
z
x
x
dx
y
R
x
h
R
x
h
x
dV p
dx
x
LV
x dV
LV
dV
L0
xp
h
L0
p
El radio del disco en la
posición x es (R/h)x y su
volumen es el producto
del área del disco y su
espesor:
R
x
h
2
2
2
R
x dx
h
R
h x dx.
3
h.
4
Aplique la ecuación (7.15)1.
7.4 Centroides de volúmenes y líneas
Problema de práctica El radio en pies de la sección transversal circular del cono
1
trunco, que se muestra en la figura, está dado como una función de x por r 1 –4 x.
Determine la coordenada x de su centroide.
y
z
x
4 pies
Respuesta: 2.43 pies.
Centroide de una línea por integración ( Relacionado con el problema 7.66)
Ejemplo 7.9
La línea L que se muestra en la figura está definida por la función y x2. Determine
la coordenada x de su centroide.
y
(1, 1)
Estrategia
Un elemento diferencial dL de una línea (figura a) puede expresarse en términos
de dx y dy:
dL = 2dx 2 + dy 2 =
1 + a
B
dy 2
b dx.
dx
y x2
L
x
A partir de la ecuación que describe la línea, la derivada dydx 2x, por lo que
se tiene una expresión para dL en términos de x:
dL = 21 + 4x 2 dx.
Solución
Para integrar sobre toda la línea, es necesario integrar desde x 0 hasta x 1. La
coordenada x del centroide es
y
(1, 1)
dL
1
x =
LL
x dL
LL
=
dL
L0
x21 + 4x 2 dx
= 0.574.
1
L0
dy
21 + 4x dx
2
Razonamiento crítico
El procedimiento usado en este ejemplo resulta apropiado para determinar el centroide de una línea que se describe mediante una función de la forma y f(x). En
el ejemplo 7.10 se muestra cómo determinar el centroide de una línea que está descrita en términos de coordenadas polares.
x
x
dx
(a) Elemento diferencial de línea dL.
339
340
Capítulo 7 Centroides y centros de masa
Ejemplo 7.10
Centroide de una línea semicircular por integración ( Relacionado con el problema 7.70)
Determine el centroide de la línea semicircular que se muestra en la figura.
y
R
x
Estrategia
Debido a la simetría de la línea, el centroide se encuentra sobre el eje x. Para determinar –x se integrará en términos de coordenadas polares. Si se le da a u un incremento du, se obtiene un elemento diferencial de línea de longitud dL R du
(figura a). La coordenada x de dL es x R cos u.
Solución
Para integrar sobre toda la línea, es necesario integrar con respecto a u desde
u p2 hasta u p2:
p>2
x =
LL
x dL
LL
L-p>2
=
1R cos u2R du
p>2
=
p>2
dL
L-p>2
sen u4-p>2
R23sin
p>2
R3u4-p>2
R du
=
2R
.
p
y
du
dL Rdu
u
x
x R cos u
(a) Elemento diferencial de línea dL R du.
Razonamiento crítico
Observe que este procedimiento de integración proporciona la longitud correcta de
la línea:
p>2
LL
dL =
L-p>2
R du = R C u D -p>2 = pR.
p>2
Problemas
341
Problemas
7.59 Use el método descrito en el ejemplo activo 7.8 para determinar el centroide del cono trunco que se muestra en la figura.
7.61 El objeto que se muestra en la figura, diseñado como pedestal para un orador, tiene un perfil obtenido al poner en revolución
la curva y 0.167x2 alrededor del eje x. ¿Cuál es la coordenada x
del centroide del objeto?
y
y
z
R
x
h
2
z
h
2
x
0.75 m
0.75 m
Problema 7.59
Problema 7.61
7.60 Un silo para el almacenamiento de granos tiene la forma de
una superficie de revolución con el perfil mostrado en la figura.
La altura del tanque es de 7 m y su diámetro al nivel del suelo es
de 10 m. Determine el volumen del tanque y la altura por encima
del nivel del suelo del centroide de su volumen.
7.62 El volumen de un cono nariz se genera al rotar la función
y x 0.2x2 alrededor del eje x.
a) ¿Cuál es el volumen del cono nariz?
b) ¿Cuál es la coordenada x del centroide del volumen?
y
y
y ax1/2
7m
z
10 m
x
x
2m
Problema 7.60
Problema 7.62
342
Capítulo 7 Centroides y centros de masa
7.63 Determine el centroide del volumen semiesférico mostrado.
y
7.66 En el ejemplo 7.9, determine la coordenada y del centroide de la línea mostrada.
7.67 Determine las coordenadas del centroide de la línea mostrada.
y
y x2
R
z
x
Problema 7.63
7.64 El volumen mostrado consiste en un segmento de esfera de
radio R. Determine su centroide.
y
1
2
x
Problema 7.67
x
R
7.68 Determine la coordenada x del centroide de la línea mostrada.
R
2
y
z
y
Problema 7.64
2
(x 1)3/2
3
7.65 El volumen de revolución que se muestra en la figura se
obtiene al girar la curva x2a2 y2b2 1 alrededor del eje x.
Determine su centroide.
y
0
1
5
Problema 7.68
x2
y2
2 1
a2
b
z
x
Problema 7.65
x
7.5 Volúmenes y líneas compuestos
7.70 Use el método descrito en el ejemplo 7.10 para determinar
el centroide del arco circular mostrado.
7.69 Determine la coordenada x del centroide de la línea mostrada.
y
y
2
y x3/2
3
a
x
R
0
x
2
Problema 7.70
Problema 7.69
7.5 Volúmenes y líneas compuestos
ANTECEDENTES
Los centroides de volúmenes y líneas compuestos se pueden obtener usando el
mismo método que para las áreas. Las coordenadas del centroide de un volumen
compuesto son
a xiVi
x =
i
a yiVi
,
y =
a Vi
i
a ziVi
,
z =
a Vi
i
i
,
(7.17)
a Vi
i
i
y las coordenadas del centroide de una línea compuesta son
a xi Li
x =
i
a yi Li
,
a Li
i
y =
i
a zi Li
,
a Li
i
z =
i
343
.
(7.18)
a Li
i
Los centroides de algunas líneas y volúmenes simples están tabulados en los apéndices B y C.
La determinación del centroide de un volumen o línea compuestos requiere de
tres pasos:
1. Escoger las partes. Trate de dividir el elemento compuesto en partes cuyos
centroides se conozcan o puedan determinarse con facilidad.
2. Determinar los valores para las partes. Determine el centroide y el volumen o
longitud de cada parte. Vea si hay relaciones de simetría que puedan simplificar la tarea.
3. Calcular el centroide. Use las ecuaciones (7.17) o (7.18) para determinar el
centroide del volumen o la línea compuestos.
344
Capítulo 7 Centroides y centros de masa
Centroide de un volumen compuesto ( Relacionado con el problema 7.71)
Ejemplo activo 7.11
Determine la coordenada x del centroide del volumen compuesto que se muestra
en la figura.
y
Estrategia
El volumen debe dividirse en partes sencillas (en este ejemplo las partes resultan
obvias), después se determinan los volúmenes y las ubicaciones de los centroides
de las partes, y se aplica la ecuación (7.17).
z
h
b
R
x
Solución
y
Selección de las partes
Divida el volumen en partes sencillas. Se
muestran las coordenadas x de los centroides de las partes. Vea el apéndice C.
1
2
x
3
h
4
1
h b
2
Determinación de los valores de las partes
Tabule los términos necesarios para aplicar la
ecuación (7.17)1.
Parte 1 (cono)
Vi
xiVi
3
h
4
1
pR2h
3
34 h 13 pR h h 12 b (pR b)
h
Parte 2 (cilindro)
x
xi
1
b
2
pR2b
2
2
x1V1 x2V2
.
V1 V2
3
h
4
1
1
pR2h h b
2
3
1
pR2h pR2b
3
pR b Cálculo del centroide
Use la ecuación (7.17)1 para
determinar la componente x
del centroide.
2
.
y
Problema de práctica El volumen compuesto consiste en un cilindro circular y una
semiesfera. Determine la coordenada x de su centroide.
R
z
b
x
Respuesta: x =
A 21 b B A pR2b B + A b + 83R B A 23pR3 B
pR2b + 23pR3
.
7.5 Volúmenes y líneas compuestos
345
Centroide de un volumen que contiene un recorte ( Relacionado con el problema 7.72)
Ejemplo 7.12
Determine el centroide del volumen que se muestra en la figura.
y
Estrategia
Este volumen puede dividirse en las cinco partes mostradas en la figura a. Observe
que las partes 2 y 3 no tienen el recorte. Se supone que está “rellenado”, lo que simplifica las geometrías de dichas partes. La parte 5, que es el volumen del agujero de
20 mm de diámetro, se tratará como un volumen negativo en las ecuaciones (7.17).
z
x
y
Solución
Selección de las partes El volumen puede dividirse en las cinco partes mostradas
en la figura a. La parte 5 es el volumen del agujero de 20 mm de diámetro.
25 mm
20 mm
x
200 mm
Determinación de los valores de las partes Los centroides de las partes 1 y 3 se
localizan en los centroides de sus secciones transversales semicirculares (figura b).
En la tabla siguiente se resume la información para determinar la coordenada x del
centroide. La parte 5 es un volumen negativo.
Vista lateral
y
z
40
mm
Información para determinar x–
x–i (mm)
Parte 1
41252
p12522
3p
2
-
Parte 2
100
Parte 3 200 +
1202
(200)(50)(20)
41252
p1252
3p
2
2
1202
Vista posterior
x–i Vi (mm4)
Vi (mm3)
c-
41252
3p
dc
p12522
2
1202 d
(100)[(200)(50)(20)]
c 200 +
41252
3p
dc
p12522
2
0
p(25) (40)
0
Parte 5
200
p(10)2(20)
(200[p(10)2(20)]
Cálculo del centroide
x =
c-
3p
dc
p12522
2
1202 d + 11002[1200215021202]
41252 p12522
dc
1202 d + 0 - 12002[p110221202]
3p
2
=
p12522
p12522
1202 + 1200215021202 +
1202 + p125221402 - p110221202
2
2
+ c200 +
72.77 mm.
4
2
3
5
(a) División del volumen en cinco partes.
y
La coordenada x del centroide del volumen compuesto es
x 1V1 + x 2V2 + x 3V3 + x 4V4 + x 5V5
V1 + V2 + V3 + V4 + V5
41252
1
1202 d
Parte 4
2
20 mm
3
1
x
4(25)
mm
3p
200 mm
4(25)
mm
3p
(b) Posiciones de los centroides de las
partes 1 y 3.
346
Capítulo 7 Centroides y centros de masa
Las coordenadas z de los centroides de las partes son iguales a cero, excepto
–z 30 mm. Por consiguiente, la coordenada z del centroide del volumen com4
puesto es
z =
=
z 4V4
V1 + V2 + V3 + V4 + V5
30[p125221402]
p12522
p12522
1202 + 1200215021202 +
1202 + p125221402 - p110221202
2
2
7.56 mm.
Debido a la simetría, –y 0.
Razonamiento crítico
Se puede ver que el volumen de este ejemplo podría ser parte de un dispositivo
mecánico. Muchas partes manufacturadas tienen volúmenes que están compuestos
por volúmenes sencillos y el método usado en este ejemplo puede emplearse para
determinar sus centroides; si éstos son homogéneos, también es posible calcular
sus centros de masa.
Centroide de una línea compuesta ( Relacionado con el problema 7.81)
Ejemplo 7.13
Determine el centroide de la línea mostrada. El arco de un cuarto de círculo pertenece al plano y–z.
y
2m
z
x
(4, 0, 2) m
Estrategia
La línea debe dividirse en partes (en este caso el arco de un cuarto de círculo y los
dos segmentos de recta), luego se determinarán los centroides de las partes y se
aplicarán las ecuaciones (7.18)
y
2(2)
m
p
Solución
Selección de las partes La línea consiste en un arco de un cuarto de círculo y en
dos segmentos de recta, que se llamarán partes 1, 2 y 3 (figura a).
(0, 2, 0) m
3
2(2)
m
p
z
(0, 0, 2) m
(2, 1, 1) m
1
2
x
(2, 0, 2) m
(4, 0, 2) m
(a) División de la línea en tres partes.
Determinación de los valores para las partes A partir del apéndice B, las coordenadas del centroide de arco de un cuarto de círculo son –x1 0, –y1 –z1 2(2)p m.
Los centroides de los segmentos rectos están en sus puntos medios. Para el segmento
2, –x2 2 m, –y2 0 y –z2 2 m, y para el segmento 3, –x3 2 m, –y3 1 m y –z3 1 m.
La longitud del segmento 3 es L 3 = 21422 + 1222 + 1222 = 4.90 m. Esta información se resume en la tabla.
Problemas
Información para determinar el centroide.
–y (m)
–z (m)
x– (m)
i
Parte 1
Parte 2
Parte 3
i
0
2
2
i
2(2)p
0
1
2(2)p
2
1
347
Li (m)
p(2)2
4
4.90
Cálculo del centroide Las coordenadas del centroide de la línea compuesta son
x =
0 + 122142 + 12214.902
x 1L 1 + x 2L 2 + x 3L 3
=
= 1.478 m,
L1 + L2 + L3
p + 4 + 4.90
y =
[2122>p][p122>2] + 0 + 11214.902
y1L 1 + y2L 2 + y3L 3
=
= 0.739 m,
L1 + L2 + L3
p + 4 + 4.90
z =
[2122>p][p122>2] + 122142 + 11214.902
z 1L 1 + z 2L 2 + z 3L 3
=
= 1.404 m.
L1 + L2 + L3
p + 4 + 4.90
Razonamiento crítico
¿Qué posibles razones podrían tenerse para querer conocer el centroide (posición
media) de una línea? En la sección 7.7 se demuestra que el centro de masa de una
barra homogénea delgada, que es el punto donde el peso de la barra puede representarse mediante una fuerza equivalente, se encuentra aproximadamente en el
centroide del eje de la barra.
Problemas
7.71 En el ejemplo activo 7.11, suponga que el cilindro es
hueco con un radio interno de R2 como se muestra en la figura.
Si las dimensiones R 6 pulg, h 12 pulg y b 10 pulg, ¿cuál
es la coordenada x del centroide del volumen?
7.72 Use el procedimiento descrito en el ejemplo 7.12 para
determinar la componente x del centroide del volumen mostrado.
y
y
y
25 mm
x z
z
R
h
10 mm
b
R
2
Problema 7.71
x
20
mm
60 mm
Problema 7.72
348
Capítulo 7 Centroides y centros de masa
En los problemas 7.73 a 7.78 determine los centroides
de los volúmenes.
y
y
20 mm
25 mm
75 mm
x
z
R
120 mm
25 mm
100 mm
x
z
4R
Problema 7.76
y
Problema 7.73
1.75 pulg
y
200 mm
1 pulg
5 pulg
z
300 mm
4 pulg
1 pulg
x
z
x
Problema 7.77
Problema 7.74
y
y
30 mm
60 mm
z
z
x
60 mm
90 mm
360 mm
460 mm
Problema 7.75
x
180
mm
180
mm
Problema 7.78
Problemas
7.79 Las dimensiones (en metros) del vehículo espacial Gemini
que se muestra en la figura son: a 0.70, b 0.88, c 0.74,
d 0.98, e 1.82, f 2.20, g 2.24 y h 2.98. Determine el
centroide de su volumen.
349
En los problemas 7.82 y 7.83, determine los centroides
de las líneas.
y
3m
x
6m
y
Problema 7.82
g
y
e
b
a
c
f
d
h
x
2m
2m
Problema 7.79
x
7.80 En la figura se presentan dos vistas de un elemento de
máquina. Determine el centroide de su volumen.
2m
2m
Problema 7.83
y
y
24 mm
7.84 La parte semicircular de la línea mostrada pertenece al
plano x–z. Determine el centroide de la línea.
y
8 mm
18 mm
60 mm
8 mm
x z
20
mm
50 mm
100 mm
16
mm
160 mm
x
120 mm
Problema 7.80
z
Problema 7.84
7.81 En el ejemplo 7.13, suponga que el arco circular se
remplaza por una línea recta como se muestra en la figura.
Determine el centroide de la línea de tres segmentos.
7.85 Determine el centroide de la línea mostrada.
y
y
(0, 2, 0) m
(0, 0, 2) m
z
200 mm
x
60
x
(4, 0, 2) m
Problema 7.81
Problema 7.85
350
Capítulo 7 Centroides y centros de masa
7.6 Teoremas de Pappus-Guldinus
ANTECEDENTES
En esta sección se analizan dos teoremas de gran utilidad que relacionan las superficies y los volúmenes de revolución con los centroides de las líneas y áreas que
los generan.
Primer teorema
Considere una línea L en el plano x–y que no interseca al eje x (figura 7.12a). Sean
(x–, –y ) las coordenadas del centroide de la línea. Se puede generar una superficie
haciendo girar la línea alrededor del eje x (figura 7.12b). Como la línea gira alrededor del eje x, su centroide se mueve en una trayectoria circular de radio –y .
El primer teorema de Pappus-Guldinus establece que el área de la superficie
de revolución es igual al producto de la distancia que el centroide de la línea recorre y la longitud de la línea:
A 2p –y L.
(7.19)
Para demostrar este resultado, se observa que conforme la línea gira alrededor del
eje x, el área dA generada por un elemento dL de la línea es dA 2py dL, donde
y es la coordenada y del elemento dL (figura 7.12c). Por lo tanto, el área total
de la superficie de revolución es
A = 2p
LL
y dL.
(7.20)
A partir de la definición de la coordenada y del centroide de la línea,
LL
y =
y dL
LL
,
dL
se obtiene
LL
y dL = yL.
Sustituyendo este resultado en la ecuación (7.20), se obtiene la ecuación (7.19).
y
y
y
_
y
dL
y
L
x
_
y
x
z
z
x
(a)
(b)
Figura 7.12
(a) Una línea L y la coordenada y de su centroide.
(b) Superficie generada al hacer girar la línea L alrededor del eje x, y trayectoria seguida
por el centroide de la línea.
(c) Elemento dL de la línea y el elemento de área dA que genera.
dA
(c)
7.6 Teoremas de Pappus–Guldinus
Segundo teorema
Considere un área A en el plano x–y que no interseca al plano x (figura 7.13a). Sean
(x–, –y ) las coordenadas del centroide del área. Se puede generar un volumen haciendo girar el área alrededor del eje x (figura 7.13b). Conforme el área gira alrededor
del eje x, su centroide recorre la trayectoria circular de longitud 2py–.
El segundo teorema de Pappus-Guldinus establece que la magnitud del volumen
de revolución generado es igual al producto de la distancia que recorre el centroide del área por la magnitud del área:
V = 2pyA.
(7.21)
Al girar el área alrededor del eje x, el volumen dV generado por un elemento dA del
área es dV 2py dA, donde y es la coordenada y del elemento dA (figura 7.13c).
Por lo tanto, el volumen total es
V = 2p
LA
y dA.
(7.22)
A partir de la definición de la coordenada y del centroide del área,
y =
LA
y dA
LA
,
dA
se obtiene
LA
y dA = yA.
Sustituyendo este resultado en la ecuación (7.22), resulta la ecuación (7.21).
y
y
dA
y
x
z
_
y
A
_
y
x
z
x
(a)
y
(b)
Figura 7.13
(a) Área A y la coordenada y de su centroide.
(b) Volumen generado al girar el área A alrededor del eje x y la trayectoria seguida por el
centroide del área.
(c) Elemento dA del área y el elemento de volumen dV que genera.
dV
(c)
351
352
Capítulo 7 Centroides y centros de masa
RESULTADOS
Primer teorema de Pappus-Guldinus
y
La línea L está en el plano x–y. La
coordenada y del centroide de L es y.
L
_
y
x
Si la línea L se gira alrededor del eje x, su
centroide se mueve en una trayectoria circular
de radio y. El área de la superficie de
revolución generada por L al girar es igual al
producto de la distancia que recorre el
centroide por la longitud de L:
(7.19)
A 2pyL.
y
_
y
x
z
Segundo teorema de Pappus-Guldinus
y
El área A se encuentra en el plano x–y.
La coordenada y del centroide de A es y.
_
y
A
x
y
Si el área A se gira alrededor del eje x, su
centroide se mueve en una trayectoria
circular de radio y.
El volumen de revolución generado por A al
girar es igual al producto de la distancia que
recorre el centroide por el área A:
(7.21)
V 2pyA.
x
z
_
y
353
7.6 Teoremas de Pappus–Guldinus
Ejemplo activo 7.14
Teoremas de Pappus-Guldinus ( Relacionado con el problema 7.86)
Utilice el primer teorema de Pappus-Guldinus para determinar el área superficial del
cono que se muestra en la figura.
R
Estrategia
La superficie curva del cono puede generarse haciendo girar una línea recta alrededor
de un eje. Como se conoce la ubicación del centroide de la línea recta, se puede
usar el primer teorema de Pappus-Guldinus para determinar el área de la superficie
curva.
h
Solución
Al girar la línea recta alrededor del eje x se
genera la superficie curva del cono. Se muestra
la coordenada y del centroide de la línea.
La longitud de la línea es L h2 R2.
El área de la superficie curva es
y
R
_
1
yL R
2
x
A 2pyLL pR h R .
2
2
Al añadir el área de la base, el área total de la
superficie del cono es pR h2 R2 pR2.
h
Problema de práctica Use el segundo teorema de Pappus-Guldinus para determinar
el volumen del cono.
Respuesta: V =
1
phR2.
3
Ejemplo 7.15
Determinación de un centroide con el teorema de Pappus-Guldinus
La circunferencia de una esfera de radio R es 2pR y su área superficial es 4pR2. Use
esta información para determinar el centroide de una línea semicircular.
( Relacionado con el problema 7.88)
Estrategia
Al girar una línea semicircular alrededor de un eje se genera un área esférica. Conociendo el área generada, se puede usar el primer teorema de Pappus-Guldinus
para determinar el centroide de la línea generatriz.
Solución
La longitud de la línea semicircular es L pR, y –y L es la coordenada y de su centroide. Al girar la línea alrededor del eje x se genera la superficie de una esfera. El
primer teorema de Pappus-Guldinus establece que el área de la esfera es
(2p –y )L 2p2Ry– .
L
y
L
_
yL
Igualando esta expresión al área superficial dada 4pR2, se obtiene –y L:
yL =
2R
.
p
Razonamiento crítico
Si se puede obtener un resultado usando los teoremas de Pappus-Guldinus, se ahorrará tiempo y esfuerzo en comparación con otros métodos. Compare este ejemplo
con el ejemplo 7.10, en el que se usó integración para determinar el centroide de una
línea semicircular.
x
R
Giro de una línea semicircular alrededor del eje x.
354
Capítulo 7 Centroides y centros de masa
Problemas
7.86 Use el método descrito en el ejemplo activo 7.14 para
determinar el área de la parte curva de la superficie del cono
trunco que se muestra en la figura.
7.87 Use el segundo teorema de Pappus-Guldinus para determinar
el volumen del cono trunco que se muestra en la figura.
7.92 Una tobera para el motor de un gran cohete se diseña giran2
(x 1)32 alrededor del eje y. Use el primer
do la función y –
3
teorema de Pappus-Guldinus para determinar el área de la superficie lateral de la tobera.
y
y
y
z
2
(x 1)3/2
3
R
x
x
h
2
5 pies
h
2
Problema 7.92
Problemas 7.86/7.87
7.88 El área del semicírculo sombreado que se muestra en la
4
pR3. Extienda el
figura es –12 pR2. El volumen de una esfera es –
3
método descrito en el ejemplo 7.15 para el segundo teorema de
Pappus-Guldinus y determine el centroide –y S del área semicircular.
y
_
yS
7.93 Las coordenadas del centroide de la línea mostrada son
x– 332 mm y y– 118 mm. Use el primer teorema de PappusGuldinus para determinar el área de la superficie de revolución
obtenida al girar la línea alrededor del eje x.
7.94 Las coordenadas del centroide del área entre el eje x y la
línea mostrada son x– 355 mm y y– 78.4 mm. Use el segundo
teorema de Pappus-Guldinus para determinar el volumen obtenido
al girar el área alrededor del eje x.
y
x
R
Problema 7.88
200 mm
7.89 Use el segundo teorema de Pappus-Guldinus para determinar
el volumen generado al girar la curva mostrada alrededor del eje y.
7.90 La longitud de la curva mostrada es L 1.479, y el área
generada cuando gira alrededor del eje x es A 3.810. Use el
primer teorema de Pappus-Guldinus para determinar la coordenada y del centroide de la curva.
7.91 Use el primer teorema de Pappus-Guldinus para determinar el
área de la superficie generada al girar la curva mostrada alrededor
del eje y.
y
60
x
Problemas 7.93/7.94
7.95 El volumen de revolución mostrado contiene un orificio de
radio R.
a) Use integración para determinar su volumen.
b) Use el segundo teorema de Pappus-Guldinus para determinar
su volumen.
Ra
(1, 1)
R
y x2
h
Problemas 7.89–7.91
x
Problema 7.95
7.7 Centros de masa de objetos
7.96 Determine la magnitud del volumen de revolución mostrado.
7.97 Determine el área de la superficie del volumen de revolución
mostrado.
355
7.98 El volumen de revolución mostrado tiene una sección
transversal elíptica. Determine su volumen.
230 mm
130 mm
140
mm
180 mm
80
mm
Problema 7.98
Problemas 7.96/7.97
7.7 Centros de masa de objetos
ANTECEDENTES
El centro de masa de un objeto es el centroide, o posición media, de su masa. A
continuación se proporciona la definición analítica del centro de masa y se demuestra una de sus propiedades más importantes: el peso de un objeto puede representarse mediante una sola fuerza equivalente que actúa en su centro de masa. Después
se analiza cómo localizar centros de masa y se muestra que, en los casos de ciertas
clases particulares de objetos, el centro de masa coincide con el centroide de un
volumen, un área o una línea.
El centro de masa de un objeto está definido por
x =
Lm
x dm
Lm
,
dm
y =
Lm
y dm
Lm
,
dm
z =
Lm
y
Lm
,
(7.23)
x
dm
- gj dm = - mg j = - Wj.
El momento del peso del elemento dm respecto al origen es
(xi yj zk) (dmg j) gzi dm gxk dm.
Al integrar esta expresión sobre m, se obtiene el momento total respecto al origen
debido al peso del objeto:
Lm
dm
z dm
donde x, y y z son las coordenadas del elemento diferencial de masa dm (figura 7.14).
Los subíndices m indican que la integración se debe llevar a cabo sobre la toda la
masa del objeto.
Antes de considerar cómo se determina el centro de masa de un objeto, se
demostrará que el peso de un objeto puede representarse mediante una sola fuerza
equivalente que actúa en su centro de masa. Sea dm un elemento de masa de un objeto (figura 7.15a). Si el eje y del sistema coordenado apunta hacia arriba, el peso de
dm es dmg j. Integrando esta expresión sobre la masa m, se obtiene el peso total
del objeto,
Lm
y
1gz i dm - gxk dm2 = mgz i - mgx k = W z i - W x k.
z
z
x
Figura 7.14
Un objeto y un elemento diferencial de
masa dm.
356
Capítulo 7 Centroides y centros de masa
Si el peso del objeto se representa mediante la fuerza –Wj que actúa en el centro
de masa (figura 7.15b), el momento de esta fuerza respecto al origen es igual al
momento total debido al peso:
(x– i –y j –z k) (W j) W –z i W –x k.
y
dm
(x, y, z)
dmgj
x
z
(a)
Este resultado muestra que, cuando se tiene interés sólo en la fuerza total y el
momento total ejercidos por el peso de un objeto, se puede suponer que su peso
actúa en el centro de masa.
Para aplicar las ecuaciones (7.23) a objetos específicos, se cambiará la variable
de integración de masa a volumen introduciendo el concepto de densidad. La densidad r de un objeto se define de tal forma que la masa de un elemento diferencial
dV de su volumen es dm r dV. Por lo tanto, las dimensiones de r son (masa/volumen). Por ejemplo, puede expresarse en kg/m3 en unidades SI o en slug/pie3 en unidades de uso común en Estados Unidos. La masa total de un objeto es
y
m =
Lm
dm =
LV
r dV.
(7.24)
Un objeto cuya densidad es uniforme en todo su volumen se conoce como homogéneo. En este caso, la masa total es igual al producto de la densidad y el volumen:
(x, y, z)
m = r
Wj
x
z
(b)
Figura 7.15
(a) Peso del elemento dm.
(b) Representación del peso mediante una
sola fuerza en el centro de masa.
LV
dV = rV.
(7.25)
Objeto homogéneo
El peso específico se define como g gr. Puede expresarse en N/m3 en unidades
SI, o en lb/pie3 en unidades de uso común en Estados Unidos. El peso de un elemento de volumen dV de un objeto es dW g dV, y el peso total de un cuerpo
homogéneo es igual a gV.
Al sustituir dm r dV en la ecuación (7.23), es posible expresar las coordenadas del centro de masa en función de integrales de volumen:
x =
LV
rx dV
,
LV
y =
r dV
LV
ry dV
LV
,
LV
z =
r dV
rz dV
LV
.
(7.26)
r dV
Si r se conoce como una función de posición en un objeto, estas expresiones determinan su centro de masa. Además, se pueden usar para demostrar que los centros
de masa de ciertas clases de objetos coinciden con los centroides de volúmenes,
áreas y líneas:
• El centro de masa de un cuerpo homogéneo coincide con el centroide de su
volumen. Si un objeto es homogéneo, r constante y las ecuaciones (7.26) se
convierten en las ecuaciones para el centroide del volumen,
x =
LV
x dV
LV
A
Vista frontal
Figura 7.16
Placa de espesor uniforme.
Vista lateral
,
dV
y =
LV
ydV
LV
,
dV
z =
LV
z dV
LV
.
dV
• El centro de masa de una placa homogénea de espesor uniforme coincide
con el centroide del área de su sección transversal (figura 7.16). El centro
de masa de la placa coincide con el centroide de su volumen, y ya se demostró en la sección 7.4 que el centroide del volumen de una placa de espesor uniforme coincide con el centroide del área de su sección transversal.
• El centro de masa de una barra delgada homogénea con área uniforme
en su sección transversal coincide aproximadamente con el centroide del
7.7 Centros de masa de objetos
y
y
dm
dL
x
x
Figura 7.17
(a) Barra delgada y el centroide de su eje.
(b) Elemento dm.
z
z
(b)
(a)
eje de la barra (figura 7.17a). El eje de la barra se define como la línea que
pasa por el centroide de su sección transversal. Sea dm rA dL, donde A es
el área de la sección transversal de la barra y dL es un elemento diferencial de
la longitud de su eje (figura 7.17b). Si se sustituye esta expresión en las ecuaciones (7.26), éstas se convierten en las ecuaciones para el centroide del eje:
x =
LL
x dL
LL
,
y =
dL
LL
y dL
LL
,
dL
z =
LL
z dL
LL
.
dL
Este resultado es aproximado porque el centro de masa del elemento dm no coincide con el centroide de la sección transversal donde la barra es curva.
RESULTADOS
y
dm
y
x
Lm
x dm
Lm
y
Lm
z
dm
dm
LV
LV
x
,
z
r dV
z
ry dV
, (7.23), (7.26).
LV
z dm
Lm
rx dV
i
L
y dm
Lm
Lm
dm
LV
r dV
Coordenadas del centro de masa de un objeto,
donde dm es un elemento infinitesimal de su
masa y r es su densidad.
rz dV
LV
.
r dV
x
Un objeto es homogéneo si su densidad r es
constante, o uniforme. El centro de masa de
un objeto homogéneo coincide con el
centroide de su volumen.
357
358
Capítulo 7 Centroides y centros de masa
El centro de masa de una placa homogénea
con espesor uniforme coincide con el
centroide del área de su sección transversal.
A
Visra frontal
Vista lateral
y
El centro de masa de una barra delgada
homogénea con un área de sección transversal
uniforme, coincide aproximadamente con el
centroide del eje de la barra.
x
z
Ejemplo activo 7.16
Representación del peso de una barra en forma de L ( Relacionado con el
problema 7.99)
La masa de la barra delgada homogénea que se muestra en la figura es de 80 kg. ¿Qué
valor tienen las reacciones en A y B?
B
1m
A
1m
Estrategia
Las reacciones pueden determinarse de dos maneras:
Primer método Se representa el peso de cada segmento recto de la barra mediante
una fuerza que actúa en el centro de masa del segmento.
Segundo método Se determina el centro de masa de toda la barra, el cual se
encuentra en el centroide de su eje y se representa el peso de la barra mediante
una sola fuerza que actúa en el centro de masa.
Solución
Primer método
y
B
1m
(40)(9.81) N
x
Ax
(40)(9.81) N
Ay
0.5 m
Fx Ax B 0,
Fy Ay (40)(9.81) N (40)(9.81) N 0,
Mpunto A (1 m)B (1 m)[(40)(9.81) N] (0.5 m)[(40)(9.81) N] 0.
Resolviendo se obtiene Ax 589 N, Ay 785 N y B 589 N.
0.5 m
Represente el peso
de cada segmento
recto mediante una
fuerza que actúa en
el centro de masa
del segmento y
aplique el equilibrio.
7.7 Centros de masa de objetos
Segundo método
y
2
0.5 m
1
x
0.5 m
x
x1L1 x2L2
(0.5)(1) (1)(1)
0.75 m,
L1 L2
11
y
(0)(1) (0.5)(1)
y1L1 y2L2
0.25 m,
11
L1 L2
Trate al eje de la barra como
una línea compuesta por las
partes 1 y 2 y calcule las
coordenadas de su centroide.
y
B
1m
x
(80)(9.81) N
Ax
Ay
0.75 m
Fx Ax B 0,
Fy Ay (80)(9.81) N 0,
Mpunto A (1 m)B (0.75 m) [(80)(9.81) N] 0.
Resolviendo se obtiene de nuevo Ax 589 N,
Ay 785 N, y B 589 N.
Coloque el peso de toda la
barra en su centro de masa y
aplique el equilibrio.
Problema de práctica La masa de la barra circular homogénea que se muestra en la
figura es de 80 kg. ¿Qué valores tienen las reacciones en A y B?
B
1m
A
Respuesta: Ax 500 N, Ay 785 N, B 500 N.
359
360
Capítulo 7 Centroides y centros de masa
Cilindro con densidad no uniforme ( Relacionado con el problema 7.105)
Ejemplo 7.17
Determine la masa del cilindro que se muestra en la figura y la posición de su centro de masa si a) es homogéneo con densidad r0 y b) si su densidad está dada por
la ecuación r r0(1 xL).
y
z
A
Estrategia
En (a), la masa del cilindro es simplemente el producto de su densidad por su volumen, y el centro de masa se encuentra en el centroide de su volumen. En la parte
(b), el cilindro no es homogéneo y se deben usar las ecuaciones (7.24) y (7.26) para
determinar su masa y su centro de masa.
L
x
Solución
(a) El volumen del cilindro es LA, por lo que su masa es r0LA. Como el centro
de masa coincide con el centroide del volumen del cilindro, las coordenadas del
centro de masa son x– –12 L, y– 0, –z 0.
(b) La masa del cilindro puede determinarse usando un elemento de volumen dV
en la forma de un disco de espesor dx (figura a). El volumen dV A dx. La masa
del cilindro es
y
L
dV
z
m =
x
Lv
r dV =
L0
r0 a1 +
x
3
bA dx = r0 AL.
L
2
La coordenada x del centro de masa es
dx
x
L
(a) Elemento de volumen dV en la forma de
un disco.
x =
Lv
xr dV
Lv
=
r dV
L0
r0 ax +
x2
bA dx
L
3
r AL
2 0
=
5
L.
9
Como la densidad no depende de y o z, se sabe por simetría que –y 0 y –z 0.
Razonamiento crítico
Observe que el centro de masa de un cilindro no homogéneo no se localiza en el
centroide de su volumen. Su densidad aumenta de izquierda a derecha, por lo que
el centro de masa se ubica a la derecha del punto medio del cilindro. Muchos de los
objetos que se estudian en ingeniería no son homogéneos, pero no es común que
la densidad del objeto varíe en forma continua a través de su volumen, como en este
ejemplo. Con mayor frecuencia, los objetos consisten en ensambles de partes (compuestos) que tienen diferentes densidades porque están hechas de materiales distintos. A menudo, las partes individuales son aproximadamente homogéneas. En la
siguiente sección se analiza la determinación de los centros de masa de este tipo
de objetos compuestos.
361
Problemas
Problemas
7.99 Suponga que la barra del ejemplo activo 7.16 se remplaza
con esta barra homogénea de 100 kg. a) ¿Cuál es la coordenada x del
centro de masa de la barra? b) Determine las reacciones en A y B.
y
0.5 m
7.102 La barra mostrada tiene una masa de 80 kg. ¿Qué valor
tienen las reacciones en A y B?
A
B
2m
2m
1m
B
A
Problema 7.102
x
1m
Problema 7.99
7.100 La masa de la placa plana homogénea es de 50 kg. Determine las reacciones en los soportes en A y B.
7.103 La masa por unidad de longitud de la barra mostrada es de
2 kg/m. Elija la dimensión b para que la parte BC de la barra suspendida sea horizontal. ¿Qué valor tiene la dimensión b y cuáles
son las reacciones resultantes sobre la barra en A?
100 mm
400 mm
A
1m
200 mm
B
A
B
600 mm
800 mm
30
600 mm
b
Problema 7.100
7.101 El letrero suspendido que se muestra en la figura consiste
en una placa plana homogénea con masa de 130 kg. Determine las
fuerzas axiales en las barras AD y CE (note que el eje y es positivo
hacia abajo).
C
Problema 7.103
7.104 La parte semicircular de la barra delgada homogénea pertenece al plano x–z. Determine el centro de masa de la barra.
A
2m
4m
C
y
1m
E
B
x
D
10 pulg
16 pulg
y
y 1 0.0625x2
Problema 7.101
12 pulg
z
x
Problema 7.104
362
Capítulo 7 Centroides y centros de masa
7.105 La densidad del cono está dada por la ecuación
r r0(1 xh), donde r0 es una constante. Use el procedimiento descrito en el ejemplo 7.17 para demostrar que la
masa del cono está dada por m (74)r0V, donde V es el
volumen del cono, y que la coordenada x del centro de masa
del cono es x– (2735)h.
7.106 Un cono horizontal con 800 mm de longitud y 200 mm de
radio tiene un soporte fijo en el punto A de la figura. Su densidad
es r 6000(1 0.4x2) kg/m3, con x en metros. ¿Qué valor tienen
las reacciones en A?
y
y
200 mm
x
A
z
800 mm
R
Problema 7.106
x
h
Problema 7.105
7.8 Centros de masa de objetos compuestos
ANTECEDENTES
Las coordenadas del centro de masa de un objeto que consiste en una combinación
de partes pueden determinarse si los centros de masa de sus partes son conocidos.
Las coordenadas del centro de masa de un objeto compuesto por partes con masas
m1, m2, . . . , son
a xi mi
x =
i
a yi mi
,
y =
a mi
i
a zi mi
,
z =
a mi
i
i
,
(7.27)
a mi
i
i
donde –x i, –y i, –z i son las coordenadas de los centros de masa de las partes. Como los
pesos de las partes están relacionados con sus masas por Wi gmi, las ecuaciones
(7.27) también se pueden expresar como
a xi Wi
x =
i
a yi Wi
,
a Wi
i
y =
i
a zi Wi
,
a Wi
i
z =
i
.
(7.28)
a Wi
i
Cuando se conocen las masas o los pesos y los centros de masa de las partes de un
objeto compuesto, se pueden usar esas ecuaciones para determinar su centro de masa.
La determinación del centro de masa de un objeto compuesto requiere de tres
pasos:
1. Escoger las partes. Trate de dividir el objeto en partes cuyos centros de masa
se conozcan o puedan determinarse con facilidad.
2. Determinar los valores para las partes. Determine el centro de masa y la masa
o peso de cada parte. Vea si hay relaciones de simetría que puedan simplificar la tarea.
3. Calcular el centro de masa. Use las ecuaciones (7.27) o (7.28) para determinar el centro de masa del objeto compuesto.
7.8 Centros de masa de objetos compuestos
Ejemplo activo 7.18
363
Centro de masa de un objeto compuesto ( Relacionado con el problema 7.107)
y
La pieza de máquina en forma de L que se muestra en la figura está compuesta por dos barras homogéneas. La barra 1 es de una aleación de tungsteno con
densidad de 14,000 kg/m3. La barra 2 es de acero con densidad de 7800 kg/m3.
Determine la coordenada x del centro de masa de esta pieza.
240 mm
1
Estrategia
Se puede determinar la masa y la coordenada x del centro de masa de cada barra
homogénea y aplicar la ecuación (7.27)1.
40 mm
2
80 mm
Solución
80 mm
z
El volumen de la barra 1 es
V1 (80 mm)(240 mm)(40 mm)
240 mm
x
7.68 105 mm3
7.68 104 m3,
por lo que su masa es
m1 r1V1
Masa de barra 1.
(14,000 kg/m3)(7.68 104 m3)
10.8 kg.
El centro de masa coincide con
el centroide del volumen de la
barra, entonces
1
x1 (80 mm) 40 mm.
2
La barra 2 tiene el mismo volumen que la
barra 1, por lo que la masa de la barra 2 es
m2 r2V2
Centro de masa de la barra 1.
Masa de la barra 2.
(7800 kg/m3)(7.68 104 m3)
5.99 kg.
La coordenada x del centroide del
volumen de la barra es
1
x2 80 mm (240 mm) 200 mm.
2
x
Centro de masa de la barra 2.
x1m1 x2m2
m1 m2
(40 mm)(10.8 kg) (200 mm)(5.99 kg)
10.8 kg 5.99 kg
97.2 mm.
Aplique la ecuación (7.27)1.
Problema de práctica Determine la coordenada y del centro de masa de la pieza de
máquina en forma de L.
Respuesta: –y 91.4 mm.
364
Capítulo 7 Centroides y centros de masa
Ejemplo 7.19
Centro de masa de un objeto compuesto ( Relacionado con el problema 7.109)
El objeto compuesto de la figura consiste en una barra soldada a un cilindro. La
barra homogénea es de aluminio (peso específico de 168 lb/pie3), y el cilindro homogéneo es de bronce (peso específico de 530 lb/pie3). Determine el centro de masa
del objeto.
Vista frontal
Vista lateral
y
y
2 pulg
x
z
4 pulg
5
5
pulg
pulg
12 pulg
10 pulg
Estrategia
Se puede determinar el peso de cada una de las partes homogéneas multiplicando
su volumen por su peso específico. También se sabe que el centro de masa de cada
parte coincide con el centroide de su volumen. El centroide del cilindro se localiza en
su centro, pero es necesario determinar la localización del centroide de la barra tratándola como un volumen compuesto.
Solución
El volumen del cilindro es
Vcilindro (12 pulg)[p(4 pulg)2 p(2 pulg)2]
452 pulg3 0.262 pie3,
por lo que su peso es
Wcilindro (0.262 pie3)(530 lb/pie3) 138.8 lb.
La coordenada x de su centro de masa es –x cilindro 10 pulg. El volumen de la barra
es
Vbarra (10 pulg)(8 pulg)(2 pulg) –21 p(4 pulg)2(2 pulg) –21 p(4 pulg)2(2 pulg)
160 pulg3 0.0926 pie3,
y su peso es
Wbarra (0.0926 pie3)(168 lb/pie3) 15.6 lb.
El centroide del volumen de la barra puede determinarse tratando ésta como un
volumen compuesto que consta de tres partes (figura a). La parte 3 es un “recorte”
semicircular. Los centroides de la parte 1 y del recorte semicircular 3 se localizan
7.8 Centros de masa de objetos compuestos
1
y
2
1
3
x
3
4(4)
pulg
3p
10 pulg
4(4)
pulg
3p
(b) Centroides de las dos partes semicirculares.
(a) División de la barra en tres partes.
en los centroides de sus secciones transversales semicirculares (figura b). Usando
la información resumida en la tabla, se tiene
x 1V1 + x 2V2 + x 3V3
–xx
bar =
barra
V1 + V2 + V3
4142
-
3p
[21 p1422122] + 5[1102182122] - c10 1
2
2 p142 122
=
1.86 pulg.
4142
3p
d[21 p1422122]
+ 1102182122 - 21 p1422122
Información para determinar la coordenada x del centroide de la barra
x– (pulg)
V (pulg3)
x– V (pulg4)
i
Parte 1
4142
3p
1
2
2 p142 122
5
(10)(8)(2)
-
Parte 2
Parte 3
i
10 -
4142
3p
- 21 p1422122
i
i
4142
-
3p
C 21 p1422122 D
5[(10)(8)(2)]
- c10 -
4142
3p
d C 21 p1422122 D
Por lo tanto, la coordenada x del centro de masa del objeto compuesto es
x =
=
x barraWbarra + x cilindroWcilindro
Wbarra + Wcilindro
11.86 pulg2115.6 lb2 + 110 pulg21138.8 lb2
15.6 lb + 138.8 lb
= 9.18 pulg.
Debido a la simetría de la barra, las coordenadas y y z de su centro de masa son
y– 0 y –z 0.
Razonamiento crítico
El objeto compuesto de este ejemplo no es homogéneo, lo que significa que no se
podría suponer que su centro de masa coincide con el centroide de su volumen. Pero
la barra y el cilindro son homogéneos de manera independiente, entonces podrían
determinarse sus centros de masa individuales encontrando los centroides de sus
volúmenes. El reto principal en este ejemplo fue determinar el centroide del volumen de la barra con su extremo semicircular y su recorte semicircular.
365
366
Capítulo 7 Centroides y centros de masa
Centros de masa de vehículos ( Relacionado con los problemas 7.115, 7.116)
Ejemplo 7.20
Un automóvil se coloca sobre una plataforma que mide la fuerza normal ejercida
por cada llanta en forma independiente. En la tabla siguiente se muestran los pesos
registrados con la plataforma horizontal y con la plataforma inclinada a a 15°.
Determine la posición del centro de masa del automóvil.
Mediciones de las fuerzas normales ejercidas por las llantas
Distancia entre ejes = 2.82 m
Ancho entre ruedas = 1.55 m
Cargas medidas (N)
Rueda frontal izquierda, NLF
Rueda frontal derecha, NRF
Rueda trasera izquierda, NLR
Rueda trasera derecha, NRR
a0
a 15°
5104
5027
3613
3559
4463
4396
3956
3898
Ancho
entre ruedas
Distancia entre ejes
a
Estrategia
Las mediciones dadas indican las reacciones normales ejercidas por la plataforma
sobre las llantas del automóvil. Al dibujar diagramas de cuerpo libre del vehículo
en las dos posiciones y aplicar las ecuaciones de equilibrio, se obtendrán ecuaciones de las cuales se pueden despejar las coordenadas desconocidas del centro de
masa del automóvil.
y
Solución
En las figuras a y b se dibuja el diagrama de cuerpo libre del automóvil con la plataforma en posición horizontal. El peso del vehículo es
x
W NLF NRF NLR NRR
NLR NRR
W
x
NLF NRF
Distancia entre ejes
(a) Vista lateral del diagrama de cuerpo libre
con la plataforma horizontal.
5104 5027 3613 3559
17,303 N.
A partir de la figura a, se obtiene la ecuación de equilibrio
Meje z (distancia entre ejes)(NLF NRF) –x W 0,
7.8 Centros de masa de objetos compuestos
367
de la cual es posible despejar –x :
x =
=
1distancia entre ejes21NLF + NRF2
W
12.82 m215104 N + 5027 N2
17,303 N
= 1.651 m.
De la figura b,
z
Meje x –z W (ancho entre ruedas)(NRF NRR) 0,
de donde puede despejarse –z :
z =
=
1ancho entre ruedas21NRF + NRR2
z
W
NRF NRR
11.55 m215027 N + 3559 N2
del automóvil cuando la plataforma está inclinada (figura c). De la ecuación de
equilibrio
M
(distancia entre ejes)(N N ) –y W sen 15° –x W cos 15°
eje z
LF
RF
0,
se obtiene
=
xW cos15° - 1distancia entre ejes21NLF + NRF2
W sen 15°
11.651 m2117,303 N2 cos 15° - 12.82 m214463 N + 4396 N2
117,303 N2 sen 15°
= 0.584 m.
Observe que –y no podría haberse determinado sin las mediciones hechas con el
automóvil en la posición inclinada.
y
x
x
N LF
N RF
W
y
15
W
NLF NLR
Track
17,303 N
= 0.769 m.
Ahora que se conoce –x , se puede determinar –y a partir del diagrama de cuerpo libre
y =
y
ejes
N RR
entre
N LR
a
i
c
n
Dista
(c) Vista lateral del diagrama de cuerpo libre con la plataforma
inclinada.
(b) Vista frontal del diagrama de cuerpo
libre con la plataforma horizontal.
368
Capítulo 7 Centroides y centros de masa
Problemas
7.107 En el ejemplo activo 7.18, suponga que la barra 1 se
remplaza por una barra con las mismas dimensiones, la cual
está hecha de una aleación de aluminio con una densidad de
2600 kg/m3. Determine la coordenada x del centro de masa de la
pieza de máquina.
7.111 En la figura se muestran dos vistas de un elemento de máquina. La parte 1 es de una aleación de aluminio con densidad de
2800 kg/m3, y la parte 2 es de acero con densidad de 7800 kg/m3.
Determine las coordenadas de su centro de masa.
y
y
1
24 mm
7.108 El tubo cilíndrico mostrado está hecho de aluminio con
densidad de 2700 kg/m3; el tapón cilíndrico está hecho de acero
con densidad de 7800 kg/m3. Determine las coordenadas del
centro de masa del objeto compuesto.
2
8 mm
18 mm
y
x
8 mm
z
20
mm
z
60 mm
16
mm
50 mm
Problema 7.111
7.112 Se tienen las cargas F1 F2 25 kN. La masa de la armadura es de 900 kg. Los elementos de la armadura son barras
homogéneas con la misma sección transversal uniforme. a) ¿Cuál
es la coordenada x del centro de masa de la armadura? b) Determine las reacciones
en A y en G.
F1
y
x
y
y
Tubo
D
A
Tapón
20 mm
x
3m
z
100
mm
100
mm
F2
B
35 mm
E
A
3m
Sección A-A
G
A
Problema 7.108
x
C
4m
4m
7.109 En el ejemplo 7.19, suponga que el objeto se rediseña
de manera que el radio del cilindro hueco se incrementa de 2 pulg
a 3 pulg. ¿Cuál es la coordenada x del centro de masa del objeto?
7.110 Una máquina consta de tres partes. Las masas y las posiciones de los centros de masa de dos de las partes son
Parte
Masa (kg)
x– (mm)
–y (mm)
–z (mm)
1
2.0
100
50
20
2
4.5
150
70
0
La masa de la parte 3 es de 2.5 kg. El ingeniero encargado
del diseño quiere colocar la parte 3 de modo que la ubicación del
centro de masa de la máquina sea x– 120 mm, y– 80 mm,
–z 0. Determine la posición requerida para el centro de masa
de la parte 3.
Problema 7.112
7.113 Con el motor retirado, la masa del automóvil mostrado
es de 1100 kg y su centro de masa está en C. La masa del motor es
de 220 kg.
a) Suponga que se desea situar el centro de masa E del motor de
manera que el centro de masa del automóvil quede a la mitad de la
distancia entre las ruedas frontales A y las traseras B. ¿Qué valor
debe tener la distancia b?
b) Si el automóvil se estaciona sobre una pendiente de 15° y de
frente a ésta, ¿qué valor tiene la fuerza normal ejercida por el
suelo sobre las ruedas traseras B?
E
C
0.6 m
0.45 m
A
B
1.14 m
b
2.60 m
Problema 7.113
369
Problemas de repaso
7.114 El avión que se muestra en la figura se encuentra estacionado con su tren de aterrizaje descansando sobre balanzas.
Los pesos registrados en A, B y C son 30 kN, 140 kN y 146 kN
respectivamente. Después de que una caja se carga en el avión,
los pesos registrados en A, B y C son 31 kN, 142 kN y 147 kN,
respectivamente. Determine la masa y las coordenadas x e y del
centro de masa de la caja.
7.116 Un grupo de estudiantes de ingeniería construye un
dispositivo en miniatura del tipo descrito en el ejemplo 7.20 y lo
usa para determinar el centro de masa de un vehículo. Los datos
que obtienen se muestran en la siguiente tabla:
Distancia entre ejes = 36 pulg
Ancho entre ruedas = 30 pulg
B
6m
7.115 Una maleta de 90 kg se coloca en la cajuela del automóvil descrito en el ejemplo 7.20. La posición del centro de masa de
la maleta es –x s 0.533 m, –y s 0.762 m, –z s 0.305 m. Si se
considera a la maleta como parte del automóvil, ¿cuál es la nueva
posición del centro de masa del automóvil?
A
a0
a 10°
Rueda frontal izquierda, NLF
35
32
Rueda frontal derecha, NRF
36
33
Rueda trasera izquierda, NLR
27
34
Rueda trasera derecha, NRR
29
30
x
C
6m
10 m
Cargas medidas (lb)
y
Determine el centro de masa del vehículo. Use el mismo sistema
coordenado que en el ejemplo 7.20.
Problema 7.114
Problemas de repaso
7.117 Determine el centroide del área mostrada considerando
que dA es una tira vertical con un ancho dx.
7.120 Determine el centroide del área mostrada.
y
7.118 Determine el centroide del área mostrada considerando
que dA es una tira horizontal con una altura dy.
40 mm
y
20 mm
(1, 1)
40 mm
y x2
80 mm
Problemas 7.117/7.118
x
x
7.119 Determine el centroide del área mostrada.,
120 mm
y
160 mm
Problema 7.120
60 cm
x
80 cm
Problema 7.119
60 cm
370
Capítulo 7 Centroides y centros de masa
7.121 La viga en voladizo que se muestra en la figura está sujeta
a una carga triangular distribuida. ¿Qué valor tienen las reacciones
en A?
7.124 Determine las reacciones sobre el elemento ABCD mostrado en A y D.
2 kN/m
2 kN/m
y
D
E
1m
1m
200 N/m
C
1m
A
x
B
10 m
1m
Problema 7.121
A
7.122 ¿Qué valor tiene la carga axial en el elemento BD del bastidor mostrado?
F
1m
C
100 N/m
Problema 7.124
7.125 Estime el centroide del volumen de la configuración de
retorno del módulo lunar Apolo (sin incluir la tobera de su cohete)
considerándolo como un cono y un cilindro.
5m
B
D
y
5m
E
A
12.8 pies
x
10 m
Tobera
Problema 7.122
10 pies
7.123 Un ingeniero estima que la carga máxima del viento sobre
la torre de 40 m que se muestra en la figura a puede describirse
mediante la carga distribuida de la figura b. La torre está soportada
por tres cables, A, B y C, desde la punta de la torre hasta puntos
igualmente espaciados a 15 m de la base de la torre (figura c). Si
el viento sopla desde el oeste y los cables B y C están flojos, ¿cuál
es la tensión en el cable A? (Modele la base de la torre como un
soporte de cuenca y bola.)
14 pies
Problema 7.125
7.126 La forma de la tobera de la configuración de retorno lunar
del cohete Apolo se obtiene en forma aproximada haciendo girar la
curva mostrada alrededor del eje x. En términos de las coordenadas
indicadas, determine el centroide del volumen de la tobera.
y
y 0.350 0.435x 0.035x2
200 N/m
B
N
A
40 m
x
15 m
C
A
B, C
(a)
400 N/m
(b)
Problema 7.123
(c)
2.83 m
Problema 7.126
Problemas de repaso
7.127 Determine las coordenadas del centroide del volumen.
371
7.130 Determine la coordenada x del centro de masa de la placa
homogénea de acero mostrada.
y
y
120 mm
220 mm
100
mm
40 mm
150 mm
z
30 mm
20 mm
x
50 mm
x
Problema 7.130
Problema 7.127
7.128 Determine el área superficial del volumen de revolución
que se muestra en la figura.
7.131 El área de la placa homogénea mostrada es de 10 pies2.
Las reacciones verticales sobre la placa en A y B son de 80 lb y
84 lb respectivamente. Suponga que desea igualar las reacciones
en A y B taladrando un agujero de 1 pie de diámetro en la placa.
¿A qué distancia horizontal de A debe estar el agujero? ¿Qué
valor tienen las reacciones resultantes en A y B?
5 pulg
A
9 pulg
B
5 pies
6 pulg
Problema 7.131
Problema 7.128
7.129 Determine la coordenada y del centro de masa de la placa
homogénea de acero mostrada.
y
7.132 La placa mostrada es de espesor uniforme y está hecha
de un material homogéneo cuya masa por unidad de área de la
placa es de 2 kg/m2. Las reacciones verticales en A y B son de
6 N y 10 N respectivamente. ¿Cuál es la coordenada x del
centroide del agujero?
20 mm
10 mm
1m
20 mm
x
80 mm
Problema 7.129
B
A
20 mm
2m
Problema 7.132
372
Capítulo 7 Centroides y centros de masa
7.133 Determine el centro de masa de la lámina de metal homogénea que se muestra en la figura.
y
7.136 El esquema mostrado sirve para determinar la posición
del centro de masa de una persona. Un tablón horizontal tiene
un soporte de pasador en A y descansa sobre una balanza que
registra pesos en B. La distancia entre A y B es de 2.3 m. Cuando
la persona no está sobre el tablón, la escala en B registra 90 N.
a) Cuando una persona de 63 kg está en la posición (1), la balanza
en B registra 496 N. ¿Cuál es la coordenada x del centro de masa
de la persona?
x
b) Cuando la misma persona está en la posición (2), la balanza
registra 523 N. ¿Cuál es la coordenada x del centro de masa de
la persona?
4 pulg
8 pulg
y
z
12 pulg
9 pulg
Problema 7.133
7.134 Determine el centro de masa del objeto homogéneo
mostrado.
B
x
A
60 mm
z
(1)
10 mm
y
y
B
60 mm
20 mm
30
mm
z
x
x
A
(2)
x
Problema 7.136
y
30 mm
7.137 Si se amarra una cuerda a la barra en A y se permite que la
barra mostrada cuelgue libremente, ¿cuál será el ángulo entre AB
y la vertical?
10 mm
z
B
Problema 7.134
7.135 Determine el centro de masa del objeto homogéneo
mostrado.
y
5 pulg
1.5 pulg
4 pulg
x
A
z
Vista superior
z
8 pulg
Problema 7.137
x
y
1 pulg
3 pulg
x
2 pulg
Vista lateral
Problema 7.135
Problemas de repaso
7.138 Si el camión que se muestra en la figura está descargado, las
reacciones totales en las ruedas delanteras y traseras son A 54 kN
y B 36 kN. La densidad de la carga de grava es r 1600 kg/m3.
La dimensión de la carga en la dirección z es de 3 m y el perfil de
su superficie, dado por la función mostrada, no depende de z. ¿Qué
valor tienen las reacciones totales en las ruedas del camión cuando
éste se encuentra cargado?
y
y 1.5 0.45x 0.062x 2
x
B
A
2.8 m
3.6 m
5.2 m
Problema 7.138
7.139 La masa de la Luna es 0.0123 veces la masa de la Tierra.
Si el centro de masa de la Luna está a 383,000 km del centro de
masa de la Tierra, ¿qué distancia hay del centro de masa de la
Tierra al centro de masa del sistema Tierra-Luna?
373
Proyecto de diseño
7.140 Construya una placa delgada homogénea con la forma
mostrada en la figura a (use el cartón de una libreta para construir
la placa; elija sus dimensiones de manera que la placa resulte lo
más grande posible). Calcule la posición del centro de masa de
la placa. Midiendo con el mayor cuidado posible, marque con
claridad el centro de masa en ambos lados de la placa. Luego
realice los siguientes experimentos.
a) Equilibre la placa sobre un dedo (figura b) y observe que lo
hace sobre su centro de masa. Explique el resultado de este
experimento dibujando un diagrama de cuerpo libre de la placa.
b) Este experimento requiere una aguja o un clavo delgado, un
tramo de cordel y un pequeño peso. Ate el peso a un extremo
del cordel y haga un lazo pequeño en el otro extremo. Inserte
la aguja en la placa en cualquier punto que no sea el centro de
masa. Sostenga horizontalmente la aguja de modo que la placa
cuelgue libremente (figura c). Use el lazo para colgar el peso
de la aguja y deje que cuelgue libremente de modo que la
cuerda se encuentre a lo largo de la cara de la placa. Observe
que la cuerda pasa por el centro de masa de la placa. Repita
este experimento varias veces, insertando la aguja en varios
puntos de la placa. Explique los resultados de este experimento
dibujando un diagrama de cuerpo libre de la placa.
c) Sostenga la placa de modo que el plano de ésta sea vertical,
y láncela hacia arriba haciéndola girar como un frisbee. Observe
que la placa gira alrededor de su centro de masa.
1
1
1
1
(a)
(b)
(c)
CAPÍTULO
8
Momentos de inercia
Las cantidades llamadas momentos de inercia surgen frecuentemente en los análisis de problemas de ingeniería.
Los momentos de inercia de áreas se utilizan en el estudio
de fuerzas distribuidas y en el cálculo de deflexiones de
vigas. El momento ejercido por la presión sobre una placa
plana sumergida se puede expresar en términos del momento de inercia del área de la placa. En dinámica, los
momentos de inercia de masa se usan para calcular los movimientos giratorios de objetos. En este capítulo se muestra
cómo calcular los momentos de inercia de áreas y objetos
sencillos, y luego se emplean los resultados llamados teoremas de los ejes paralelos para calcular momentos de
inercia de áreas y objetos más complejos.
La resistencia a la flexión de una viga y su capacidad para soportar cargas
dependen de una propiedad de su sección transversal llamada momento de
inercia. En este capítulo se define y se muestra cómo calcular momentos
de inercia de áreas.
376
Capítulo 8 Momentos de inercia
ÁREAS
8.1 Definiciones
Considere un área A en el plano x-y (figura 8.1a). Se definen cuatro momentos de
inercia de A:
1. Momento de inercia respecto al eje x:
Ix =
LA
y 2 dA,
(8.1)
donde y es la coordenada y del elemento diferencial de área dA (figura 8.1b).
En ocasiones, este momento de inercia se expresa en términos del radio de
giro respecto al eje x, kx, el cual se define mediante
Ix = kx2 A.
(8.2)
2. Momento de inercia respecto al eje y:
Iy =
LA
x 2 dA,
(8.3)
donde x es la coordenada x del elemento dA (figura 8.1b). El radio de giro
respecto al eje y, ky, está definido por
Iy = k y2 A.
(8.4)
y
A
x
(a)
y
dA
y
r
x
x
(b)
Figura 8.1
(a) Área A en el plano x-y.
(b) Elemento diferencial de A.
8.1 Definiciones
3. Producto de inercia:
Ix y =
LA
xy dA.
(8.5)
4. Momento polar de inercia:
JO =
LA
r 2 dA,
(8.6)
donde r es la distancia radial desde el origen del sistema coordenado hasta
dA (figura 8.1b). El radio de giro respecto al origen, kO, se define como
JO = kO2 A.
(8.7)
El momento polar de inercia es igual a la suma de los momentos de inercia respecto a los ejes x e y:
JO =
LA
r 2 dA =
LA
1y 2 + x 22 dA = Ix + Iy.
Al sustituir en esta ecuación las expresiones para los momentos de inercia en términos de los radios de giro se obtiene
kO2 = kx2 + k y2.
Las dimensiones de los momentos de inercia de un área son (longitud)4, y
los radios de giro tienen dimensiones de longitud. Observe que las definiciones
de los momentos de inercia Ix, Iy y JO y las de los radios de giro implican que
éstos tienen valores positivos para cualquier área. No pueden ser negativos ni
iguales a cero.
Si un área A es simétrica respecto al eje x, para cada elemento dA con coordenadas (x, y), existe un elemento dA correspondiente con coordenadas (x, y),
como se muestra en la figura 8.2. Las contribuciones de estos dos elementos al
producto de inercia Ixy del área se cancelan: xy dA (xy) dA 0. Esto significa que el producto de inercia del área es igual a cero. Se puede usar el mismo tipo
de argumento para un área que es simétrica respecto al eje y. Si un área es simétrica respecto al eje x o al eje y, su producto de inercia es igual a cero.
y
A
dA
(x, y)
dA
(x, y)
x
Figura 8.2
377
378
Capítulo 8 Momentos de inercia
Momentos de inercia de un área triangular ( Relacionado con los
Ejemplo activo 8.1
problemas 8.1–8.3)
Determine Ix e Iy para el área triangular mostrada.
y
Estrategia
La ecuación (8.3) para el momento de inercia respecto al eje y es muy parecida en
su forma a la ecuación para la coordenada x del centroide de un área, y es posible
evaluarla exactamente del mismo modo, usando un elemento diferencial de área
dA en forma de una tira vertical de ancho dx. Después se demostrará que Ix puede
evaluarse utilizando el mismo elemento de área.
h
Solución
x
y
b
dA
h
f(x) –h x
b
x
x
dx
b
Iy x2dA
LA
b
x2f(x)dx
L0
b
x2
b xdx
h
La altura de una tira de ancho dx en la posición x es
f(x) (h/b)x, por lo que su área es dA f(x) dx.
Use esta expresión para evaluar la ecuación (8.3).
L0
1
hb3.
4
Para evaluar Ix, primero se determina el momento de inercia de la tira vertical dA
respecto al eje x.
y
dAs
dy
f(x)
y
x
x
dx
(Ix)tira Ltira
y2dAs
f(x)
(y2dx)dy
L0
1
3
[f(x)] dx.
3
Sea dAs un elemento de la tira vertical dA;
aplique la ecuación 8.1.
8.1 Definiciones
379
b
Ix 1
[f(x)]3dx
L0 3
b
Integre la expresión para (Ix)tira con
respecto a x desde x 0 hasta x b
para determinar el Ix del triángulo.
3
dx
1 h
x
L0 3 b
1
bh3.
12
Problema de práctica Determine Ixy para el área triangular mostrada. Hágalo determinando el producto de inercia de la tira vertical dA para después integrar la expresión
resultante con respecto a x desde x 0 hasta x b.
Respuesta: Ixy 1 2 2
bh.
8
Momentos de inercia de un área circular ( Relacionado con el problema 8.21)
Ejemplo 8.2
Determine los momentos de inercia y los radios de giro del área circular mostrada.
y
Estrategia
Primero se determinará el momento polar de inercia JO integrando en términos de
coordenadas polares. Por la simetría del área, se sabe que Ix Iy y como Ix Iy JO,
1
cada uno de los momentos de inercia Ix e Iy es igual a 2 JO. También se sabe, por la
simetría del área, que Ixy 0.
x
Solución
R
Si se deja que r cambie una cantidad dr, se obtiene un elemento anular de área
dA 2p r dr (figura a). El momento polar de inercia es
R
JO =
LA
r 2 dA =
L0
2pr 3 dr = 2pc
r4 R
1
d = pR 4,
4 0
2
y el radio de giro respecto a O es
kO =
JO
11>22pR 4
1
=
=
R.
2
CA
C pR
22
y
dA
Los momentos de inercia respecto a los ejes x e y son
1
1
Ix = Iy = JO = pR 4,
2
4
dr
r
x
y los radios de giro respecto a los ejes x e y son
kx = ky =
Ix
11>42pR 4
1
=
= R.
2
CA
C pR
2
El producto de inercia es igual a cero:
Ixy = 0.
Razonamiento crítico
Por la simetría de este ejemplo, no hubo necesidad de integrar para determinar
Ix, Iy e Ixy. Se recomienda estar alerta respecto a simetrías que puedan reducir el
trabajo. En particular, recuerde que Ixy 0 si el área es simétrica respecto a alguno de los ejes, x o y.
(a) Elemento anular dA.
380
Capítulo 8 Momentos de inercia
Problemas
8.1 Use el método descrito en el ejemplo activo 8.1 para
determinar Iy y ky del área rectangular mostrada.
8.2 Use el método descrito en el ejemplo activo 8.1 para
determinar Ix y kx del área rectangular mostrada.
8.4 a) Determine el momento de inercia Iy de la sección transversal de la viga rectangular mostrada con respecto al eje y.
b) Determine el momento de inercia Iy de la sección transversal
de la viga respecto al eje y. Use sus valores numéricos
para demostrar que Iy Iy d 2x A, donde A es el área de la
sección transversal.
y
8.5 a) Determine el momento polar de inercia JO de la sección
transversal de la viga rectangular mostrada con respecto al origen O.
b) Determine el momento polar de inercia JO de la sección transversal de la viga respecto al origen O. Use sus valores numéricos
para demostrar que JO JO (d 2x d 2y)A, donde A es el área de
la sección transversal.
0.6 m
y
x
0.2 m
y
dx
0.4 m
Problemas 8.1/8.2
60 mm
8.3 En el ejemplo activo 8.1, suponga que el área triangular se
reorienta en la forma mostrada en la figura. Use integración para
determinar Iy y ky.
x
O
dy
y
x
O
40 mm
Problemas 8.4/8.5
8.6 Determine Iy y ky.
h
8.7 Determine JO y kO.
x
b
8.8 Determine Ixy.
y
Problema 8.3
0.6 m
0.3 m
x
1m
Problemas 8.6–8.8
Problemas
8.9 Determine Iy.
8.17 Determine Iy y ky.
8.10 Determine Ix.
8.18 Determine Ix y kx.
381
y
8.11 Determine JO.
y
8.12 Determine Ixy.
1 2
x 4x 7
4
y5
y
y 2 x2
x
Problemas 8.17/8.18
8.19 a) Determine Iy y ky de la figura, considerando a dA como
una tira vertical de ancho dx.
b) El momento polar de inercia de un área circular con su centro
en el origen es JO = 21 pR 4. Explique cómo se puede usar esta
información para verificar su respuesta al inciso a).
1
8.20 a) Determine Ix y kx de la figura considerando a dA como
una tira horizontal de altura dy.
b) El momento polar de inercia de un área circular con su centro
en el origen es JO = 21 pR 4. Explique cómo se puede usar esta
información para verificar su respuesta al inciso a).
x
Problemas 8.9–8.12
y
8.13 Determine Iy y ky.
8.14 Determine Ix y kx.
x
8.15 Determine JO y kO.
R
8.16 Determine Ixy.
y
1
y x2 4x 7
4
Problemas 8.19/8.20
8.21 Use el procedimiento descrito en el ejemplo 8.2 para
determinar los momentos de inercia Ix e Iy para el anillo que se
muestra en la figura.
y
x
Ro
Problemas 8.13–8.16
x
Ri
Problema 8.21
382
Capítulo 8 Momentos de inercia
8.22 ¿Qué valores tienen Iy y ky para el área elíptica del ala de
avión que se muestra en la figura?
8.23 ¿Qué valores tienen Ix y kx para el área elíptica del ala de
avión que se muestra en la figura?
8.26 La placa vertical de área A que se muestra en la figura se
encuentra bajo la superficie de un cuerpo de agua en reposo. La
presión del agua somete a cada elemento dA de la superficie de
la placa a una fuerza ( pO gy)dA, donde pO es la presión en la
superficie del agua y g es la densidad del agua. Demuestre que
la magnitud del momento respecto al eje x debido a la presión
sobre la cara frontal de la placa es
y
Meje x = pOyA + gIx,
y2
x2
21
2
b
a
donde y es la coordenada y del centroide de A e Ix es el momento
de inercia de A respecto al eje x.
x
2m
x
5m
A
Problemas 8.22/8.23
y
8.24 Determine Iy y ky.
Problema 8.26
8.25 Determine Ix y kx.
y
y x2 20
yx
x
Problemas 8.24/8.25
383
8.2 Teorema de los ejes paralelos
8.2 Teorema de los ejes paralelos
ANTECEDENTES
Los valores de los momentos de inercia de un área dependen de la posición del sistema coordenado en relación con el área.
En algunas situaciones, los momentos de inercia de un área se conocen en
términos de un sistema coordenado particular pero se requieren sus valores en términos de un sistema coordenado diferente. Cuando los sistemas coordenados son
paralelos, los momentos de inercia deseados pueden obtenerse mediante los teoremas que se describen en esta sección. Además, estos teoremas hacen posible
determinar los momentos de inercia de un área compuesta cuando se conocen los
momentos de inercia de sus partes.
Suponga que se conocen los momentos de inercia de un área A en términos de
un sistema coordenado xy con su origen en el centroide del área, y se desea determinar los momentos de inercia con respecto a un sistema coordenado paralelo xy
(figura 8.3a). Las coordenadas del centroide de A en el sistema coordenado xy se
denotan con (dx, dy) y d = 2d 2x + d 2y es la distancia desde el origen del sistema
xy hasta el centroide (figura 8.3b).
Es necesario obtener dos resultados preliminares antes de deducir los teoremas
de los ejes paralelos. En términos del sistema coordenado xy, las coordenadas del
centroide de A son
y
y
A
x
x
(a)
y
y
x
dx
dA
x
y
x
x¿ =
LA
x¿dA
,
LA
y¿ =
dA
LA
d
y¿dA
LA
x¿dA = 0,
LA
dA
(b)
y¿dA = 0.
(8.8)
Momento de inercia respecto al eje x En términos del sistema coordenado xy, el momento de inercia de A respecto al eje x es
Ix =
LA
y 2 dA,
(8.9)
donde y es la coordenada del elemento de área dA relativa al sistema coordenado
xy. En la figura 8.3b se observa que y y dy, donde y es la coordenada de dA
relativa al sistema coordenado xy. Sustituyendo esta expresión en la ecuación
(8.9), se obtiene
Ix =
LA
1y¿ + dy22 dA =
LA
1y¿22 dA + 2dy
LA
y¿dA + d y2
LA
dA.
La primera integral a la derecha es el momento de inercia de A respecto al eje x.
A partir de la ecuación (8.8), la segunda integral a la derecha es igual a cero. Por
lo tanto, se obtiene
Ix = Ix¿ + d y2 A.
y
x
.
Pero el origen del sistema coordenado xy está localizado en el centroide de A, por
lo que x¿ = 0 y y¿ = 0. Por lo tanto,
LA
dy
(8.10)
Figura 8.3
(a) Área A y sistemas coordenados xy y xy.
(b) Elemento diferencial dA.
384
Capítulo 8 Momentos de inercia
y
y
y
y
A
x
x
dy
Figura 8.4
Teorema de los ejes paralelos para el momento
de inercia respecto al eje x.
x
Ix
x
dy2A
Ix
Éste es un teorema de los ejes paralelos. Relaciona el momento de inercia de A
respecto al eje x que pasa por el centroide con el momento de inercia respecto al
eje x paralelo (figura 8.4).
Momento de inercia respecto al eje y En términos del sistema coordenado xy, el momento de inercia de A respecto al eje y es
Iy =
=
LA
LA
x 2 dA =
LA
1x¿ + dx22 dA
1x¿22 dA + 2dx
LA
x¿dA + d x2
LA
dA.
A partir de la ecuación (8.8), la segunda integral a la derecha es igual a cero. Por
consiguiente, el teorema de los ejes paralelos que relaciona el momento de inercia
de A respecto al eje y que pasa por el centroide con el momento de inercia respecto al eje y paralelo es
Iy = Iy¿ + d 2x A.
Producto de inercia
inercia es
(8.11)
En términos del sistema coordenado xy, el producto de
Ixy =
LA
xy dA =
=
LA
x¿y¿dA + dy
LA
1x¿ + dx21y¿ + dy2 dA
LA
x¿dA + dx
LA
y¿dA + dx dy
LA
dA.
La segunda y tercera integrales son iguales a cero por la ecuación (8.8). Se observa que el teorema de los ejes paralelos para el producto de inercia es
Ixy = Ix¿y¿ + dx dy A.
(8.12)
Momento polar de inercia El momento polar de inercia JO Ix Iy. Por lo
tanto, al sumar las ecuaciones (8.10) y (8.11), se obtiene el teorema de los ejes
paralelos para el momento polar de inercia,
JO = J¿O + 1d x2 + d y22A = J¿O + d 2A,
(8.13)
donde d es la distancia desde el origen del sistema coordenado xy hasta el origen
del sistema coordenado xy.
8.2 Teorema de los ejes paralelos
¿Cómo pueden usarse los teoremas de los ejes paralelos para determinar
los momentos de inercia de un área compuesta? Suponga que se desea determinar el momento de inercia del área que se muestra en la figura 8.5a respecto al
eje y. Ésta puede dividirse en un triángulo, un semicírculo y un recorte circular,
que se llamarán partes 1, 2 y 3 respectivamente (figura 8.5b). Usando el teorema de los ejes paralelos para Iy, es posible determinar el momento de inercia de
cada parte respecto al eje y. Por ejemplo, el momento de inercia de la parte 2
(el semicírculo) respecto al eje y es (figura 8.5c)
1Iy22 = 1Iy¿22 + 1dx22 A2.
2
Se deben determinar los valores de (Iy)2 y (dx)2. En el apéndice B se presentan
tablas con los momentos de inercia y las posiciones de los centroides de algunas
áreas simples. Una vez que se ha llevado a cabo este procedimiento para cada
parte, el momento de inercia del área compuesta es
Iy = 1Iy21 + 1Iy22 - 1Iy23.
Observe que el momento de inercia del recorte circular se resta.
Puede observarse que la determinación del momento de inercia de un área
compuesta en términos de un sistema coordenado específico implica la ejecución
de tres pasos:
1. Seleccionar las partes. Trate de dividir el área compuesta en partes cuyos
momentos de inercia se conozcan o puedan determinarse con facilidad.
2. Determinar los momentos de inercia de las partes. Determine el momento
de inercia de cada parte en términos de un sistema coordinado paralelo con
su origen en el centroide de la parte, y después use el teorema de los ejes
paralelos para determinar el momento de inercia en términos del sistema
coordenado dado.
3. Sumar los resultados. Sume los momentos de inercia de las partes (o reste en
caso de un recorte) para obtener el momento de inercia del área compuesta.
y
x
(a)
y
y
y
2
1
3
x
x
(b)
y
y
x
x
(dx)2
(c)
Figura 8.5
(a) Área compuesta.
(b) Las tres partes del área.
(c) Determinación de (Iy)2
x
385
386
Capítulo 8 Momentos de inercia
RESULTADOS
y
y
dx
A
x
d
dy
x
Ix Ix dy2A,
(8.10)
Iy Iy dx A,
(8.11)
2
Ixy Ixy dx dy A,
(8.12)
JO JO d2A.
(8.13)
Los teoremas de los ejes paralelos son relaciones
entre los momentos y el producto de inercia de
un área, expresadas en términos de un sistema
coordenado xyz—con su origen en el centroide
del área—y un sistema coordenado xyz paralelo.
Los teoremas de los ejes paralelos hacen posible determinar los momentos y el
producto de inercia de un área compuesta en términos de un sistema coordenado
específico, xyz, cuando se conocen los momentos y los productos de inercia de
cada parte del área compuesta en términos de un sistema coordenado paralelo, con
su origen en el centroide de la parte. Los valores de los momentos y el producto de
inercia de las partes en términos del sistema coordenado xyz pueden sumarse (o
restarse en el caso de un recorte) para obtener los valores del área compuesta.
Momentos de inercia de un área compuesta ( Relacionado con el problema 8.27)
Ejemplo activo 8.3
y
Determine Ix para el área compuesta que se muestra en la figura.
1m
Estrategia
Esta área puede dividirse en dos rectángulos. Deben usarse los teoremas de los ejes
paralelos para determinar Ix de cada rectángulo en términos del sistema coordenado xy. Los valores pueden sumarse para determinar Ix del área compuesta.
4m
Solución
1m
x
y
3m
Divida el área compuesta
en dos rectángulos.
1
2
x
8.2 Teorema de los ejes paralelos
y
y
0.5 m
1
x
2m
Del apéndice B, el momento de inercia del área 1
respecto al eje x es
1
(Ix)1 (1 m)(4 m)3 5.33 m4.
12
Aplicando el teorema de los ejes paralelos, el
momento de inercia del área 1 respecto al eje x es
(Ix)1 5.33 m4 (2 m)2 (1 m)(4 m) 21.3 m4.
x
Aplique la ecuación (8.10)
al área 1.
y
y
2m
2
0.5 m
El momento de inercia del área 2 respecto al eje
x es
1
(Ix)2 (2 m)(1 m)3 0.167 m4.
12
Aplicando el teorema de los ejes paralelos, el momento
de inercia del área 2 respecto al eje x es
(Ix)2 0.167 m4 (0.5 m)2 (2 m)(1 m) 0.667 m4.
El momento de inercia del área
compuesta respecto al eje x es
Ix (Ix)1 (Ix)2
21.3 m 0.667 m
22.0 m4.
4
4
Problema de práctica Determine Ixy para el área compuesta.
Respuesta: Ixy 6 m4.
x
x
Aplique la ecuación (8.10)
al área 2.
Sume los valores para las partes.
387
388
Capítulo 8 Momentos de inercia
Ejemplo 8.4
Momentos de inercia de un área compuesta ( Relacionado con el problema 8.30)
y
Determine Iy y ky para el área compuesta.
20 mm
40 mm
120 mm
Estrategia
Esta área puede dividirse en un rectángulo sin el recorte semicircular, un semicírculo sin el recorte semicircular y un recorte circular. Puede usarse un teorema de los ejes
x paralelos para determinar I de cada parte en términos del sistema coordenado xy.
y
Después, sumando los valores para el rectángulo y el semicírculo y restando el valor
para el recorte circular, se puede determinar Iy para el área compuesta. Luego puede
usarse la ecuación (8.4) para determinar el radio de giro ky del área compuesta.
Solución
Selección de las partes Se divide el área en un rectángulo, un semicírculo y un
recorte circular, que se llamarán partes 1, 2 y 3 respectivamente (figura a).
Determinación de los momentos de inercia de las partes En el apéndice B, se
presentan los momentos de inercia de las partes con respecto a los sistemas coordenados xy y la localización del centroide de la parte semicircular. En la tabla siguiente se usa el teorema de los ejes paralelos para determinar el momento de inercia
de cada parte respecto al eje y.
Determinación de los momentos de inercia de las partes
dx 1mm2
A 1mm22
60
(120)(80)
Parte 1
Parte 2 120 +
y
41402
y
(dx)1
Parte 3
1
x, x
1
2
2 p1402
3p
Iyœ 1mm42
1
3
12 180211202
a
Suma de los resultados
eje y es
4.608 * 107
p
8
b14024
8
9p
1
4
4 p1202
p12022
120
Iy = Iyœ + d x2 A 1mm42
4.744 * 107
1.822 * 107
El momento de inercia del área compuesta respecto al
Iy = 1Iy21 + 1Iy22 - 1Iy23 = 14.608 + 4.744 - 1.8222 * 107 mm4
= 7.530 * 107 mm4.
El área total es
y
A = A1 + A2 - A3 = 1120 mm2180 mm2 +
y
(dx)2
= 1.086 * 104 mm2,
2
x, x
por lo que el radio de giro respecto al eje y es
ky =
y
y
(dx)3
3
x, x
(a) Partes 1, 2, y 3.
1
p140 mm22 - p120 mm22
2
Iy
BA
=
7.530 * 107 mm4
= 83.3 mm.
B 1.086 * 104 mm2
Razonamiento crítico
La integración es un proceso aditivo, y ésta es la razón por la que los momentos
de inercia de las áreas compuestas pueden determinarse sumando (o restando en el
caso de un recorte) los momentos de inercia de las partes. Pero los radios de giro
de áreas compuestas no pueden determinarse sumando o restando los radios de
giro de las partes. Esto puede verse en las ecuaciones que relacionan los momentos de inercia, los radios de giro y el área. Para este ejemplo, lo anterior se puede
demostrar en forma numérica. La operación
1ky21 + 1ky22 - 1ky23 =
1Iy21
B A1
+
1Iy22
B A2
-
1Iy23
B A3
no produce el radio de giro correcto del área compuesta.
= 86.3 mm
8.2 Teorema de los ejes paralelos
Secciones transversales de una viga ( Relacionado con los problemas 8.81–8.84)
Ejemplo 8.5
y
Las áreas iguales que se muestran en la figura son opciones para la sección transversal de una viga (una viga con la segunda sección transversal se denomina viga I).
Compare sus momentos de inercia respecto al eje x.
144.2
mm
Estrategia
El momento de inercia de la sección transversal cuadrada puede obtenerse del apéndice B. La sección transversal de la viga I se dividirá en tres rectángulos y se usará
el teorema de los ejes paralelos para determinar su momento de inercia.
144.2
mm
y
Solución
Sección transversal cuadrada De acuerdo con el apéndice B, el momento de
inercia de la sección cuadrada respecto al eje x es
40 mm
1
1144.2 mm21144.2 mm23 = 3.60 * 107 mm4.
12
Ix =
x
x
120 mm
40 mm
Sección transversal de la viga I El área puede dividirse en las partes rectangulares que se muestran en la figura a. Introduciendo sistemas coordenados xy con
sus orígenes en los centroides de las partes (figura b), se usa el teorema de los ejes
paralelos para determinar los momentos de inercia respecto al eje x (vea la tabla).
Su suma es
40
mm
200 mm
Ix = 1Ix21 + 1Ix22 + 1Ix23 = 15.23 + 0.58 + 5.232 * 107 mm4
= 11.03 * 107 mm4.
y
y, y
1
y, y
y, y
1
x
2
x
80
mm
2
x
x, x
x
80
mm
3
3
x
(a) División en tres partes de la
sección transversal de la viga I.
(b) Sistemas coordenados paralelos xy con orígenes en los centroides de las partes.
Determinación de los momentos de inercia de las partes respecto
al eje x.
dy 1mm2
A 1mm22
Parte 1
80
(200)(40)
Parte 2
0
(40)(120)
Parte 3
- 80
(200)(40)
Ixœ 1mm42
1
3
12 120021402
1
3
12 140211202
1
3
12 120021402
Ix = Ixœ + d2y A 1mm42
5.23 * 107
0.58 * 107
5.23 * 107
Razonamiento crítico
El momento de inercia de la viga I respecto al eje x es 3.06 veces el de la sección
transversal cuadrada de igual área. Por lo general, una viga con un momento de
inercia más grande tiene mayor resistencia a la flexibilidad y mayor capacidad para
soportar cargas laterales. La sección transversal de las vigas I está diseñada para obtener momentos de inercia más grandes.
389
390
Capítulo 8 Momentos de inercia
Problemas
8.27 Use el procedimiento descrito en el ejemplo activo 8.3
para determinar Ix y kx del área compuesta que se muestra en la
figura; para ello divida el área en los rectángulos 1 y 2 mostrados.
8.34 Si usted diseña la sección transversal de la viga mostrada de
manera que Ix 6.4 105 mm4, ¿cuáles son los valores resultantes de Iy y JO?
y
8.28 Determine Iy y ky del área compuesta que se muestra en la
figura, para ello divida el área en los rectángulos 1 y 2 mostrados.
y
1m
h
x
1
4m
h
2
1m
x
3m
30
mm
Problemas 8.27/8.28
8.29 Determine Ix y kx.
30
mm
Problema 8.34
y
8.35 Determine Iy y ky.
8.36 Determine Ix y kx.
0.8 m
8.37 Determine Ixy.
0.2 m
y
160
mm
0.6 m
40 mm
0.2 m
x
200
mm
0.2 m
40
mm
40 mm
0.6 m
x
120
mm
Problema 8.29
8.30 En el ejemplo 8.4, determine Ix y kx para el área compuesta.
8.31 Determine Ix y kx.
Problemas 8.35–8.37
8.38 Determine Ix y kx.
8.32 Determine Iy y ky.
y
8.39 Determine Iy y ky.
8.33 Determine JO y kO.
8.40 Determine Ixy.
0.8 m
y
0.2 m
160
mm
x
0.6 m
40 mm
200
mm
0.2 m
x
40
mm
40 mm
0.2 m
0.6 m
Problemas 8.31–8.33
120
mm
Problemas 8.38–8.40
Problemas
8.41 Determine Ix y kx.
8.50 Determine Ix y kx.
8.42 Determine JO y kO.
8.51 Determine Iy y ky.
8.43 Determine Ixy.
8.52 Determine JO y kO.
y
y
20
mm
3 pies
4 pies
120
mm 80
mm
3 pies
x
x
Problemas 8.41–8.43
40 mm
8.44 Determine Ix y kx.
80 mm
8.45 Determine JO y kO.
Problemas 8.50–8.52
8.46 Determine Ixy.
8.53 Determine Iy y ky.
8.54 Determine JO y kO.
y
y
4 pies
3 pies
3 pies
x
12 pulg
Problemas 8.44–8.46
x
20 pulg
8.47 Determine Ix y kx.
8.48 Determine JO y kO.
8.49 Determine Ixy.
Problemas 8.53/8.54
8.55 Determine Iy y ky si h 3 m.
y
8.56 Determine Ix y kx si h 3 m.
8.57 Si Iy 5 m4, ¿qué valor tiene la dimensión h?
y
120
mm 80
mm
20
mm
1.2 m
x
40 mm
80 mm
h
Problemas 8.47–8.49
x
Problemas 8.55–8.57
391
392
Capítulo 8 Momentos de inercia
8.58 Determine Iy y ky.
8.64 Determine Iy y ky.
8.59 Determine Ix y kx.
8.65 Determine Ix y kx.
8.60 Determine Ixy.
8.66 Determine Ixy.
y
y
30 pulg
40
pulg
18 pulg
x
x
20 pulg
6 pulg 6 pulg 6 pulg
Problemas 8.58–8.60
Problemas 8.64–8.66
8.61 Determine Iy y ky.
8.67 Determine Iy y ky.
8.62 Determine Ix y kx.
8.68 Determine JO y kO.
8.63 Determine Ixy.
y
y
6 pulg
2 pulg
30 pulg
x
x
40
pulg
8 pulg
8 pulg
Problemas 8.67/8.68
20 pulg
Problemas 8.61–8.63
Problemas
8.69 Determine Iy y ky.
8.75 Determine Iy y ky.
8.70 Determine Ix y kx.
8.76 Determine JO y kO.
393
y
8.71 Determine Ixy.
5 mm
y
4 pulg
15 mm
2 pulg
50 mm
4 pulg
5 mm
5 mm
8 pulg
x
15 mm
15 mm
10 15 15 10
mm mm mm mm
x
12 pulg
Problemas 8.75/8.76
16 pulg
Problemas 8.69–8.71
8.77 Determine Ix e Iy para la sección transversal de la viga
mostrada.
8.72 Determine Iy y ky.
y
8.73 Determine Ix y kx.
8.74 Determine Ixy.
2 pulg
5 pulg
y
4 pulg
8 pulg
4 pulg
2 pulg
x
x
3
pulg
8 pulg
5 pulg
5 pulg
Problema 8.77
12 pulg
16 pulg
Problemas 8.72–8.74
3
pulg
394
Capítulo 8 Momentos de inercia
8.78 Determine Ix e Iy para la sección transversal de la viga
mostrada.
y
8.81 Determine el momento de inercia respecto al eje x de la
sección transversal de la viga mostrada. Compare su resultado con
el momento de inercia de una sección cuadrada sólida de igual
área (vea el ejemplo 8.5).
y
5 pulg
2 pulg
x
20 mm
x
8 pulg
160 mm
3
pulg
5 pulg
5 pulg
3
pulg
20 mm
Problema 8.78
100 mm
8.79 El área mostrada A 2 104 mm2. Su momento de inercia
respecto al eje y es Iy 3.2 108 mm4. Determine su momento
de inercia respecto al eje ŷ.
ŷ
Problema 8.81
8.82 El área de la sección transversal de la viga mostrada es
de 5200 mm2. Determine el momento de inercia de la sección
transversal de la viga respecto al eje x. Compare su resultado con
el momento de inercia de una sección transversal cuadrada sólida
de igual área (consulte el ejemplo 8.5).
y
A
y
x
x, x̂
100 mm
120 mm
Problema 8.79
20 mm
8.80 El área mostrada A 100 pulg2 y es simétrica respecto al
eje x. Los momentos de inercia Ix 420 pulg4, Iy 580 pulg4,
JO 11,000 pulg4 e Ixy 4800 pulg4. ¿Qué valor tienen Ix e Iy?
y
y
A
x
O
x
O
Problema 8.80
Problema 8.82
Problemas
8.83 Si la viga de la figura a se somete a pares de magnitud M
respecto al eje x (figura b), el eje longitudinal de la viga se dobla
en un arco circular cuyo radio R está dado por
R =
EIx
,
M
donde Ix es el momento de inercia de la sección transversal de la
viga respecto al eje x. El valor del término E, que se denomina
módulo de elasticidad, depende del material del que esté hecha la
viga. Suponga que la viga con la sección transversal mostrada en
la figura c, está sometida a pares de magnitud M 180 N-m.
Como resultado, el eje de la viga se dobla en la forma de un arco
circular con radio R 3 m. ¿Qué valor tiene el módulo de elasticidad del material de la viga? (Consulte el ejemplo 8.5).
8.85 El área de la figura a es la sección transversal de una viga
de canal estándar americano C230 30. El área de su sección
transversal es A 3790 mm2 y sus momentos de inercia respecto
a los ejes x e y son Ix 25.3 106 mm4 e Iy 1 106 mm4.
Suponga que dos vigas con secciones transversales C230 30 se
remachan entre sí para obtener una viga compuesta con la sección
transversal mostrada en la figura b. ¿Qué valores tienen los momentos de inercia respecto a los ejes x e y de la viga compuesta?
y
y
x
y
395
x
y
14.8 mm
z
x
(a) Sin carga.
(a)
M
R
(b)
Problema 8.85
M
(b) Sometida a pares en los extremos.
y
3 mm
8.86 El área de la figura a es la sección transversal de una viga
de ángulo L152 102 12.7. El área de su sección transversal
es A 3060 mm2 y sus momentos de inercia respecto a los ejes x
e y son Ix 7.24 106 mm4 e Iy 2.61 106 mm4. Suponga que
cuatro vigas con secciones transversales L152 102 12.7 se
remachan entre sí para obtener una viga compuesta con la sección
transversal mostrada en la figura b. ¿Qué valores tienen los momentos de inercia respecto a los ejes x e y de la viga compuesta?
y
x
9 mm
y
3 mm
3
mm
9 mm
24.9
mm
x
x
(c) Sección transversal de la viga.
Problema 8.83
8.84 Suponga que desea diseñar una viga hecha de material
cuya densidad es de 8000 kg/m3. La viga tendrá 4 m de longitud y
una masa de 320 kg. Diseñe una sección transversal para la viga
tal que Ix 3 105 m4 (consulte el ejemplo 8.5).
50.2 mm
(a)
(b)
Problema 8.86
396
Capítulo 8 Momentos de inercia
8.3 Ejes girados y ejes principales
ANTECEDENTES
Suponga que la figura 8.6a es la sección transversal de una viga en voladizo. Si se
aplica una fuerza vertical al extremo de la viga, se obtendrá una deflexión mayor
si la sección transversal está orientada como en la figura 8.6b que si lo está como
en la figura 8.6c. La deflexión vertical mínima resulta cuando la sección transversal de la viga está orientada de manera que el momento de inercia Ix sea máximo
(figura 8.6d).
En muchas aplicaciones de ingeniería se deben determinar los momentos de
inercia de áreas con diversas orientaciones angulares relativas a un sistema coordenado, y la orientación para la cual el valor de un momento de inercia es máximo o mínimo. En esta sección se analizarán estos procedimientos.
Ejes girados
Considere un área A, un sistema coordenado xy y un segundo sistema coordenado
xy que está girado un ángulo u con respecto al sistema coordenado xy (figura
8.7a). Suponga que se conocen los momentos de inercia de A en términos del sistema coordenado xy. El objetivo consiste en determinar los momentos de inercia
en términos del sistema coordenado xy.
En términos de la distancia radial r a un elemento diferencial de área dA y al
ángulo a de la figura 8.7b, las coordenadas de dA en el sistema coordenado xy son
x r cos a,
(8.14)
y r sen a.
(8.15)
y
Figura 8.6
(a) Sección transversal de una viga.
(b)–(d) Aplicación de una carga lateral con
diferentes orientaciones de la sección
transversal.
y
y
F
F
x
x
x
F
y
y
y
x
(a)
x
(b)
y
x
(c)
y
y
A
(d)
y
dA
x
Figura 8.7
(a) El sistema coordenado xy girado un
ángulo u respecto al sistema
coordenado xy.
(b) Elemento diferencial de área dA.
x
r
u
a
u
x
(a)
x
(b)
8.3 Ejes girados y ejes principales
Las coordenadas de dA en el sistema coordenado xy son
x r cos(a u) r(cos a cos u sen a sen u),
(8.16)
y r sen(a u) r(sen a cos u cos a sen u),
(8.17)
En las ecuaciones (8.16) y (8.17) se usan identidades trigonométricas para el coseno
y el seno de la diferencia de dos ángulos (apéndice A). Sustituyendo las ecuaciones (8.14) y (8.15) en las ecuaciones (8.16) y (8.17), se obtienen otras ecuaciones
que relacionan las coordenadas de dA en los dos sistemas coordenados:
x cos u y sen u,
(8.18)
y x sen u y cos u.
(8.19)
Estas expresiones pueden emplearse para derivar relaciones entre los momentos de
inercia de A en términos de los sistemas coordenados xy y xy.
Momento de inercia respecto al eje x
Ixœ =
LA
1y¿22 d A =
= cos2u
LA
LA
1-x sen u + y cos u22 d A
y 2 d A - 2 sen u cos u
LA
xy dA + sen2 u
LA
x 2 d A.
De esta ecuación se obtiene
Ix Ix cos2 u 2Ixy sen u cos u Iy sen2 u.
(8.20)
Momento de inercia respecto al eje y
Iyœ =
LA
1x¿22 d A =
= sen2 u
LA
LA
1x cos u + y sen u22 d A
y 2 d A + 2 sen u cos u
LA
xy d A + cos2 u
LA
x 2 d A.
Esta ecuación proporciona el resultado
Iy Ix sen2 u 2Ixy sen u cos u Iy cos2 u.
Producto de inercia
inercia de A es
(8.21)
En términos del sistema coordenado xy, el producto de
Ixy (Ix Iy)sen u cos u (cos2 u sen2 u)Ixy.
(8.22)
Momento polar de inercia Por las ecuaciones (8.20) y (8.21), el momento
polar de inercia en términos del sistema coordenado xy es
JOœ = Ixœ + Iyœ = Ix + Iy = JO.
Así, el valor del momento polar de inercia no cambia por una rotación del sistema
coordenado.
Ejes principales
Se ha visto que los momentos de inercia de A en términos del sistema coordenado xy dependen del ángulo u mostrado en la figura 8.7a. Plantéese la siguiente
pregunta: ¿Para qué valores de u el momento de inercia Ix, es máximo o mínimo?
397
398
Capítulo 8 Momentos de inercia
Para contestar esta pregunta, resulta conveniente usar las identidades
sen 2u 2 sen u cos u,
cos 2u cos2 u sen2 u 1 2 sen2 u 2 cos2 u 1.
Con estas expresiones, se pueden escribir las ecuaciones (8.20)-(8.22) en las formas
Ixœ =
Iyœ =
Ixœyœ =
Ix + Iy
2
Ix + Iy
2
Ix - Iy
2
+
-
Ix - Iy
2
Ix - Iy
2
cos 2u - Ixy sen 2u,
(8.23)
cos 2u + Ixy sen 2u,
(8.24)
sen 2u + Ixy cos 2u.
(8.25)
El valor de u para el cual Ix es máximo o mínimo se denotará con up. Para determinar up se evalúa la derivada de la ecuación (8.23) con respecto a 2u y se iguala
a cero, de donde se obtiene
tan 2up =
2Ixy
Iy - Ix
.
(8.26)
Si la derivada de la ecuación (8.24) con respecto a 2u se iguala a cero para determinar un valor de u para el cual Iy es máximo o mínimo, se obtiene de nuevo la
ecuación (8.26). Las segundas derivadas de Ix e Iy con respecto a 2u son opuestas
en signo; es decir
d 2Iyœ
d 2Ixœ
d12u22
= -
d12u22
,
lo que significa que para un ángulo up para el cual Ix es máximo, Iy es un mínimo, y que para un ángulo up para el cual Ix es mínimo, Iy es máximo.
Un sistema coordenado girado xy orientado de manera que Ix e Iy tengan
valores máximo o mínimo se denomina conjunto de ejes principales del área A.
Los correspondientes momentos de inercia Ix e Iy se llaman momentos de inercia
principales. En la siguiente sección se demostrará que el producto de inercia Ixy
correspondiente a un conjunto de ejes principales es igual a cero.
Como la tangente es una función periódica, la ecuación (8.26) no produce
una solución única para el ángulo up. Sin embargo, se puede mostrar que determina la orientación de los ejes principales dentro de un múltiplo arbitrario de 90°.
Observe en la figura 8.8 que si 2u0 es una solución de la ecuación (8.26), entonces
2u0 n(180°) es también una solución para cualquier entero n. Las orientaciones resultantes del sistema coordenado xy se muestran en la figura 8.9.
tan 2u
tan 2u 0
2u 0 180
Figura 8.8
Para un valor dado de tan 2u0, existen múltiples
raíces 2u0 n(180°).
2u 0
2u 0 180
2u 0 + 2(180)
2u
8.3 Ejes girados y ejes principales
y
y
x
y
y
u 0 90
x
y
u 0 180
y
u0
x
x
x
x
x
y
y
u 0 270
x
Figura 8.9
La orientación del sistema coordenado xy se
determina en función de un múltiplo de 90°.
RESULTADOS
y
y
A
x
u
x
Ix Ixcos2u 2Ixy sen u cos u Iy sen 2u,
(8.20)
Iy Ix sen u 2Ixy sen u cos u Iycos u,
(8.21)
2
2
Ixy (Ix Iy) sen u cos u (cos2u sen2u)Ixy.
(8.22)
Las ecuaciones (8.20) a (8.22) pueden
expresarse en formas alternativas útiles:
Ix Iy
Ix Iy
cos 2u Ixy sen 2u,
2
2
Ix Iy
Ix Iy
cos 2u Ixy sen 2u,
Iy 2
2
Ix Iy
sen 2u Ixycos 2u,
Ixy 2
Ix (8.23)
(8.24)
(8.24)
Los momentos y el producto
de inercia de un área en
términos de un sistema de
coordenadas girado xy puede
expresarse en términos de los
momentos y los productos de
inercia respecto al sistema
coordenado xy y el ángulo u.
399
400
Capítulo 8 Momentos de inercia
Un valor de u para el cual el momento de inercia Ix obtenido de la ecuación (8.23)
es un máximo o un mínimo, se denota por up. Si Ix es un máximo en u up, Iy' es un
mínimo en u up, y si Ix es un mínimo, Iy es un máximo. El sistema coordenado
girado xy correspondiente a u up define los ejes principales del área A, y los
momentos de inercia respecto a los ejes principales son los momentos de inercia
principales. El producto de inercia Ixy correspondiente a u up es igual a cero.
Para valores dados de Ix, Iy, y Ixy, el ángulo up puede determinarse mediante la
ecuación
2Ixy
(8.26)
tan 2up IyIx .
Esta ecuación define de manera única los ejes principales, y determina la orientación
del sistema coordenado xy sólo en función de un múltiplo de 90°. Por ejemplo, si
u0 es una solución de la ecuación (8.26), entonces u0 90, u0 180, y u0 270
también son soluciones, lo que resulta en cuatro orientaciones válidas del sistema
coordenado.
y
y
x
y
y
u0 90
x
y
u0 180
y
u0
x
x
y
x
x
x
y
u0 270
x
La determinación de los ejes principales y los momentos principales de inercia para
un área A y un sistema coordenado xy dados implica la realización de tres pasos:
1. Determine Ix, Iy, y Ixy.
2. Use la ecuación (8.26) para determinar up en función de un múltiplo de 90°.
3. Elija la orientación del sistema coordenado xy use las ecuaciones (8.23) y
(8.24) para determinar los momentos de inercia principales.
Ejes principales y momentos de inercia ( Relacionado con el problema 8.87)
Ejemplo activo 8.6
Determine un conjunto de ejes principales y los correspondientes momentos de inercia principales del área triangular que se muestra en la figura.
y
3m
x
4m
Estrategia
Los momentos de inercia y el producto de inercia del área triangular en términos
del sistema coordenado xy pueden obtenerse del apéndice B. Después puede usarse
la ecuación (8.26) para determinar la orientación de los ejes principales y evaluar los
momentos de inercia principales con las ecuaciones (8.23) y (8.24).
8.3 Ejes girados y ejes principales
Solución
Ix 1
(4 m)(3 m)3 9 m4,
12
Iy 1
(4 m)3(3 m) 48 m4,
4
Ixy 1
(4 m)2(3 m)2 18 m4.
8
tan 2up Determine los momentos y los productos
de inercia a partir del apéndice B.
2Ixy
2(18)
0.923.
IyIx 48 9
Determine up de la ecuación (8.26).
Lo anterior resulta en up 21.4.
y
y
x
21.4
x
Ix Iy
Ix Iy
cos 2u Ixysen 2u,
2
2
9 48
9 48
cos[2(21.4)] (18) sen [2(21.4)]
2
2
Ix 1.96 m4,
Ix Iy
Ix Iy
cos 2u Ixy sen 2u,
2
2
9 48
9 48
cos[2(21.4)] (18)sen[2(21.4)]
2
2
Iy Calcule los momentos de
inercia principales a partir de
las ecuaciones (8.23) y (8.24).
55.0 m4,
Problema de práctica Los momentos y el producto de inercia del área triangular
mostrada son Ix 9 m4, Iy 16 m4, e Ixy 6 m4. Determine un conjunto de ejes principales y los momentos de inercia principales correspondientes.
y
3m
x
4m
Respuesta: up 29.9°, Ix 5.55 m4, Iy 19.4 m4.
401
402
Capítulo 8 Momentos de inercia
Ejemplo 8.7
Ejes principales y girados ( Relacionado con los problemas 8.88, 8.89)
Los momentos de inercia del área mostrada, en términos del sistema coordenado xy
que se muestra en la figura, son Ix 22 pies4, Iy 10 pies4 e Ixy 6 pies4. a) Determine Ix, Iy e Ixy para u 30°. b) Determine un conjunto de ejes principales y los
correspondientes momentos de inercia principales.
y
y
1 pie
x
4 pies
u
1 pie
x
3 pies
Estrategia
a) Los momentos de inercia en términos del sistema coordenado xy se pueden determinar sustituyendo u 30° en las ecuaciones (8-23) a (8.25).
b) La orientación de los ejes principales se determina al despejar up de la ecuación
(8.26). Después de haber determinado up, los momentos de inercia respecto a los ejes
principales pueden determinarse a partir de las ecuaciones (8.23) y (8.24).
Solución
a) Determinación de Ix, Iy e Ixy Haciendo u 30° en las ecuaciones (8.23)a
(8.25) se obtienen los momentos de inercia en pie4:
Ix¿ =
Ix + Iy
2
= a
Iy¿ =
Ix¿y¿ =
2
2
cos 2u - Ixy sen 2u
-
Ix - Iy
2
cos 2u + Ixy sen 2u
22 + 10
22 - 10
b - a
b cos[2130°2] + 162 sen[2130°2] = 18.2 pies4,
2
2
Ix - Iy
= a
Ix - Iy
22 + 10
22 - 10
b + a
b cos32130°24 - 162 sen32130°24 = 13.8 pies4,
2
2
Ix + Iy
= a
+
2
sen 2u + Ixy cos 2u
22 - 10
b sen32130°24 + 162 cos32130°24 = 8.2 pies4.
2
8.3 Ejes girados y ejes principales
b) Determinación de up Se sustituyen los momentos de inercia en términos
del sistema coordenado xy en la ecuación (8.26), para obtener
tan 2up =
2Ixy
2162
Iy - Ix
=
10 - 22
= - 1.
Así, up 22.5°. Los ejes principales correspondientes a este valor de up se muestran en la figura a.
Cálculo de Ix e Iy Se sustituye up 22.5° en las ecuaciones (8.23) y (8.24) para
obtener los momentos de inercia principales:
Ix¿ = 24.5 pies4, Iy¿ = 7.5 pies4.
y
y
x
22.5
x
(a) Conjunto de ejes principales
correspondiente a up = - 22.5°.
Razonamiento crítico
Recuerde que la orientación de los ejes principales se determina sólo en función
de un múltiplo arbitrario de 90°. En este ejemplo se elige designar los ejes de la
figura a como los ejes positivos x e y, pero cualquiera de estas elecciones es
igualmente válida.
y
y
y
y
22.5
x
y
y
x
x
22.5
x
22.5
x
22.5
x
y
x
y
x
403
404
Capítulo 8 Momentos de inercia
Problemas
8.87 En el ejemplo activo 8.6, suponga que la dimensión vertical de 3 m en el área triangular se incrementa a 4 m. Determine
un conjunto de ejes principales y los momentos de inercia principales correspondientes.
8.88 En el ejemplo 8.7, suponga que el área se reorienta como
lo muestra la figura. Si u 30°, determine los momentos de inercia Ix, Iy e Ixy
8.90 Los momentos de inercia del área mostrada son
Ix 1.26 106 pulg4, Iy 6.55 105 pulg4, e Ixy 1.02 105
pulg4. Determine los momentos de inercia del área Ix, Ixy si u 30°.
8.91 Los momentos de inercia del área mostrada son
Ix 1.26 106 pulg4, Iy 6.55 105 pulg4, e Ixy 1.02 105
pulg4. Determine un conjunto de ejes principales y los momentos
de inercia principales correspondientes.
y
y
8.89 En el ejemplo 8.7, suponga que el área se reorienta
como lo muestra la figura. Determine un conjunto de ejes principales y los momentos de inercia principales correspondientes. Con
base en los resultados del ejemplo 8.7, ¿es posible predecir un
valor de up sin usar la ecuación (8.26)?
x
u
x
y
1 pie
Problemas 8.90/8.91
8.92* Para el área mostrada, determine un conjunto de ejes principales y los momentos de inercia principales correspondientes.
3
pies
y
1 pie
x
160 mm
4 pies
Problemas 8.88/8.89
40 mm
x
200 mm
40 mm
40 mm
120 mm
Problema 8.92
405
8.4 Círculo de Mohr
8.4 Círculo de Mohr
y
ANTECEDENTES
y
A
Dados los momentos de inercia de un área en términos de un sistema coordenado
particular, se han presentado ecuaciones para determinar los momentos de inercia
con respecto a un sistema coordenado girado, la orientación de los ejes principales y los momentos de inercia principales. También es posible usar un método gráfico llamado círculo de Mohr, que es muy útil para visualizar las soluciones de las
ecuaciones (8.23) a (8.25).
Sistema coordenado xy y sistema coordenado girado xy .
Primero se describirá cómo construir el círculo de Mohr y después se explicará
cómo funciona. Suponga que se conocen los momentos de inercia Ix, Iy e Ixy de un
área en términos de un sistema coordenado xy, y que se desean determinar los
momentos de inercia para un sistema coordenado girado xy (figura 8.10). La
construcción del círculo de Mohr implica la realización de tres pasos:
1. Establecer un conjunto de ejes horizontal y vertical, y graficar dos puntos: el
punto 1 con coordenadas (Ix, Ixy) y el punto 2 con coordenadas (Iy, Ixy),
como se muestra en la figura 8.11a.
2. Dibujar una línea recta que conecte los puntos 1 y 2. Usando la intersección
de esta línea recta con el eje horizontal como centro, se dibuja un círculo que
pase por los dos puntos (figura 8.11b).
3. Dibujar una línea recta que pase por el centro del círculo en un ángulo 2u
medido en sentido contrario al de las manecillas del reloj desde el punto 1.
Esta línea interseca al círculo en el punto 1 con coordenadas (Ix, Ixy) y en el
punto 2 con coordenadas (Iy, Ixy), como se muestra en la figura 8.11c.
Así, para un ángulo u dado, las coordenadas de los puntos 1 y 2 determinan
los momentos de inercia en términos del sistema coordenado girado. ¿Por qué funciona esta construcción gráfica? En la figura 8.12 se muestran los puntos 1 y 2 y
el círculo de Mohr. Observe que la coordenada horizontal del centro del círculo es
(Ix Iy)/2. El seno y el coseno del ángulo b son
sen b =
Ixy
R
,
cos b =
Ix - Iy
2R
C
a
Ix 2
u
x
Figura 8.10
Sistema coordenado xy y sistema coordenado
girado x¿y¿ .
()
1
(Ix, Ixy)
()
2
(Iy, Ixy)
(a)
()
1
()
2
,
donde R, que es el radio del círculo, está dado por
R =
x
(b)
()
1 (I , I )
x xy
Iy 2
b + 1Ixy22.
2u
1
()
En la figura 8.13 se muestra la construcción de los puntos 1 y 2. La coordenada
horizontal del punto 1 es
Ix + Iy
2
2
(Iy, –Ixy)
+ R cos1b + 2u2
=
=
Ix + Iy
2
Ix + Iy
2
(c)
+ R1cos b cos 2u - sen b sen 2u2
+
Ix - Iy
2
2
cos 2u - Ixy sen 2u = Ix¿,
Figura 8.11
(a) Graficación de los puntos 1 y 2.
(b) Dibujo del círculo de Mohr. El centro del
círculo está en la intersección de la línea
que va de 1 a 2 con el eje horizontal.
(c) Localización de los puntos 1 y 2.
406
Capítulo 8 Momentos de inercia
()
y la coordenada horizontal del punto 2 es
Ix Iy
2
1
R
(Ix, Ixy)
b
()
Ix Iy
2
2
Ix + Iy
2
- R cos1b + 2u2
=
(Iy, Ixy)
Figura 8.12
Puntos 1 y 2 y círculo de Mohr.
=
Ix + Iy
2
Ix + Iy
2
- R1cos b cos 2u - sen b sen 2u2
-
Ix - Iy
2
cos 2u + Ixy sen 2u = Iy¿.
La coordenada vertical del punto 1 es
R sen (b 2u) R(sen b cos 2u cos b sen 2u)
()
= Ixy cos 2u +
1
Ix Iy
2
R
Ix - Iy
1
2u
b
()
2
2
sen 2u = Ix¿y¿,
y la coordenada vertical del punto 2 es
R sen (b 2u) Ixy.
2
Figura 8.13
Puntos 1 y 2.
Se ha mostrado que las coordenadas del punto 1 son (Ix, Ixy) y las del punto 2
son (Iy, Ixy).
Determinación de ejes principales y de momentos
de inercia principales
()
2up
(Ix, Ixy)
1
2
(Iy, Ixy)
1
(Ix, Ixy)
()
2
(Iy, Ixy)
Figura 8.14
Para determinar la orientación de un conjunto
de ejes principales, sean 1 y 2 los puntos en
que el círculo interseca al eje horizontal.
Como los momentos de inercia Ix e Iy son las coordenadas horizontales de los
puntos 1 y 2 del círculo de Mohr, sus valores máximo y mínimo se presentan
cuando los puntos 1 y 2 coinciden con las intersecciones del círculo con el eje
horizontal (figura 8.14) (la intersección que se designa como 1 es arbitraria; en
la figura 8.14 se ha designado el momento de inercia mínimo como punto 1). La
orientación de los ejes principales puede determinarse midiendo el ángulo 2up del
punto 1 al punto 1, y las coordenadas de los puntos 1 y 2 como los momentos
de inercia principales.
Observe que el círculo de Mohr demuestra que el producto de inercia Ixy
correspondiente a un conjunto de ejes principales (la coordenada vertical del punto
1 en la figura 8.14) siempre es igual a cero. Además, es posible utilizar la figura 8.12
para obtener una expresión analítica para las coordenadas horizontales de los puntos en que el círculo interseca al eje horizontal, que son los momentos de inercia
principales:
Momentos de inercia principales =
Ix + Iy
2
; R
Ix + Iy
=
2
;
C
a
Ix - Iy
2
2
b + 1Ixy22.
8.4 Círculo de Mohr
RESULTADOS
y
y
A
Cuando se conocen los valores Ix, Iy, e Ixy para un
área A, el círculo de Mohr puede usarse para
determinar los valores de Ix, Iy, e Ixy para un
ángulo u dado:
x
u
x
()
1
(Ix, Ixy)
Establezca un conjunto de ejes horizontal y vertical
y grafique dos puntos: el punto 1 con coordenadas
(Ix, Ixy) y el punto 2 con coordenadas (Iy, Ixy).
()
2
(Iy, Ixy)
()
Dibuje una línea recta que conecte los puntos 1 y
2. Usando la intersección de esta línea recta con el
eje horizontal como centro, dibuje un círculo que
pase por los dos puntos.
1
()
2
()
Dibuje una línea recta que pase por el centro del círculo en un ángulo 2u medido en sentido contrario al de
las manecillas del reloj desde el punto 1. Esta línea
interseca al círculo en el punto 1 con coordenadas
(Ix, Ixy) y en el punto 2 con coordenadas (Iy, Ixy).
1 (I , I )
x xy
2u
1
()
2
2
(Iy, –Ixy)
El círculo de Mohr también puede usarse para determinar la orientación de los ejes
principales y los momentos de inercia principales.
()
Coloque el punto 1 en uno de los puntos donde el círculo de Mohr interseca al eje horizontal. Entonces los valores de Ix e Iy obtenidos de los puntos 1 y 2 son los
momentos de inercia principales. El ángulo medido en
sentido contrario al de las manecillas del reloj desde el
punto 1 hasta el punto 1 es 2up, por lo que es posible
determinar la orientación de los ejes principales.
2up
(Ix, Ixy)
1
2
(Iy, Ixy)
1
(Ix, Ixy)
()
2
(Iy, Ixy)
407
408
Capítulo 8 Momentos de inercia
Ejemplo activo 8.8
Círculo de Mohr ( Relacionado con los problemas 8.94, 8.95)
Los momentos y el producto de inercia del área mostrada en términos del sistema
coordenado xy son Ix 22 pies4, Iy 10 pies4 e Ixy 6 pies4. Utilice el círculo de Mohr
para determinar los momentos de inercia Ix, Iy e Ixy para u 30°.
y
y
1 pie
x
4
pies
u
1 pie
x
3 pies
Estrategia
Usando los valores dados de Ix, Iy e Ixy para construir el círculo de Mohr, es posible determinar Ix, Iy e Ixy para u 30°.
Solución
10
1
Grafique el punto 1 con coordenadas (Ix, Ixy) (22, 6) pies4
y el punto 2 con coordenadas (Iy, Ixy) (10, 6) pies4.
(22, 6) pies4
0
2
10
(10, 6) pies4
0
10
20
30
10
Dibuje una línea recta que conecte los puntos 1 y
2. Utilizando como centro la intersección de la
línea con el eje horizontal, dibuje un círculo que
pase por los dos puntos.
1
(22, 6) pies4
0
10
2
(10, 6) pies4
0
10
10
Dibuje una línea recta a través del centro del círculo
en un ángulo 2u 60, medido desde el punto 1 en
sentido opuesto al de las manecillas del reloj. De las
coordenadas de los puntos 1 y 2, Ix 14 pies4,
Iy 18 pies4, y Ixy 8 pies4.
(Ix, Ixy)
20
30
1
1
60
0
2
10
0
10
2 (Iy, Ixy)
20
30
Problema de práctica Use el círculo de Mohr para determinar la orientación de los ejes
principales del área mostrada y los momentos de inercia principales correspondientes.
Respuesta: up 67.5°, Ix 7.5 pies4, Iy 24.5 pies4.
8.5 Objetos simples
409
Problemas
8.93 Resuelva el problema 8.87 usando el círculo de Mohr.
8.97 Resuelva el problema 8.91 usando el círculo de Mohr.
8.94 Resuelva el problema 8.88 usando el círculo de Mohr.
8.98* Resuelva el problema 8.92 usando el círculo de Mohr.
8.95 Resuelva el problema 8.89 usando el círculo de Mohr.
8.99 Obtenga la ecuación (8.22) para el producto de inercia
usando el mismo procedimiento que se empleó para obtener las
ecuaciones (8.20) y (8.21).
8.96 Resuelva el problema 8.90 usando el círculo de Mohr.
MASAS
8.5 Objetos simples
ANTECEDENTES
La aceleración de un objeto, que resulta de las fuerzas que actúan sobre él, depende
de su masa. La aceleración angular, o aceleración rotatoria, provocada por las fuerzas
y pares que actúan sobre un objeto, depende de cantidades llamadas momentos de
inercia de masa del objeto. En esta sección se analizarán métodos para determinar
momentos de inercia de masa de objetos particulares. Se mostrará que para clases
especiales de cuerpos, sus momentos de inercia de masa pueden expresarse en términos de momentos de inercia de áreas, lo que explica cómo se originaron los nombres de esas integrales de área.
En la figura 8.15a se muestran un cuerpo y una línea o “eje” LO. El momento
de inercia de masa del objeto respecto al eje LO se define como
LO
(a)
dm
IO =
Lm
r 2 dm,
(8.27)
donde r es la distancia perpendicular desde el eje hasta el elemento diferencial de
masa dm (figura 8.15b). A menudo, LO es un eje alrededor del cual gira el objeto,
y se requiere el valor de IO para determinar la aceleración angular, es decir, la
razón de cambio de la velocidad angular causada por un par respecto a LO. Las
dimensiones del momento de inercia de un objeto son (masa) (longitud)2.
Observe que la definición implica que su valor debe ser positivo.
Barras delgadas
A continuación se determinará el momento de inercia de masa de una barra recta
y delgada respecto a un eje perpendicular L que pase por el centro de masa de
la barra (figura 8.16a). “Delgada” implica el supuesto de que la longitud de la
barra es mucho mayor que su ancho. Sea l la longitud de la barra, A el área de su
sección transversal y m su masa. Se supone que A es uniforme a lo largo de la longitud de la barra y que el material es homogéneo.
Considere un elemento diferencial de la barra de longitud dr a una distancia r
del centro de masa (figura 8.16b). La masa del elemento es igual al producto de su
volumen y su densidad: dm rA dr. Sustituyendo esto en la ecuación (8.27), se
obtiene el momento de inercia de masa de la barra respecto a un eje perpendicular
que pasa por su centro de masa:
r
LO
(b)
Figura 8.15
(a) Un objeto y el eje LO.
(b) Elemento diferencial de masa dm.
L
l
(a)
dm
r
(b)
l>2
I =
Lm
r 2 dm =
L-l>2
rAr 2 dr =
1
rAl 3.
12
Figura 8.16
(a) Barra delgada.
(b) Elemento diferencial de longitud dr.
dr
410
Capítulo 8 Momentos de inercia
y
La masa de la barra es igual al producto de la densidad y el volumen de ésta,
m rAl, por lo que el momento de inercia de masa es
y
T
x
(a)
y
dm
dA
r
x
x
1
ml 2.
12
(8.28)
z
y
y
I =
z
Para obtener este resultado se han ignorado las dimensiones laterales de la barra.
Es decir, el elemento diferencial de masa dm fue tratado como si estuviera concentrado sobre el eje de la barra. En consecuencia, la ecuación (8.28) es sólo una aproximación para el momento de inercia de una barra. En la siguiente sección se
determinarán los momentos de inercia de masa para una barra con dimensiones
laterales finitas, y se demostrará que la ecuación (8.28) permite una buena aproximación cuando el ancho de la barra es pequeño en comparación con su longitud.
(b)
Figura 8.17
(a) Placa de forma arbitraria y espesor
uniforme T.
(b) Elemento de volumen obtenido al
proyectar un elemento de área dA a
través de la placa.
Placas delgadas
Considere una placa plana homogénea con masa m y espesor uniforme T. No se
especifica la forma del área de la sección transversal de la placa. Sea el sistema
coordenado cartesiano orientado de modo que la placa quede sobre el plano x–y
(figura 8.17a). El objetivo es determinar los momentos de inercia de masa de la
placa respecto a los ejes x, y y z.
Es posible obtener un elemento diferencial de volumen de la placa proyectando un elemento de área dA a través del espesor T de la placa (figura 8.17b). El
volumen resultante es T dA. La masa de este elemento de volumen es igual al producto de la densidad y el volumen: dm rT dA. Al sustituir esta expresión en la
ecuación (8.27), se obtiene el momento de inercia de masa de la placa respecto al
eje z en la forma
Ieje z =
r 2 dm = rT
Lm
LA
r 2 d A,
donde r es la distancia desde el eje z hasta dA. Como la masa de la placa es m rT
A, donde A es el área de la sección transversal de la placa, rT m/A. La integral
a la derecha es el momento polar de inercia JO del área de la sección transversal de
la placa. Por lo tanto, el momento de inercia de masa de la placa respecto al eje z
puede escribirse como
Ieje z =
m
J .
A O
(8.29)
En la figura 8.17b se observa que la distancia perpendicular desde el eje x hasta el
elemento de área dA es la coordenada y de dA. Por lo tanto, el momento de inercia de masa de la placa respecto al eje x es
Ieje x =
Lm
y 2 dm = rT
LA
y 2 dA =
m
I,
A x
(8.30)
donde Ix es el momento de inercia del área de la sección transversal de la placa respecto al eje x. El momento de inercia de masa de la placa respecto al eje y es
Ieje y =
Lm
x 2 dm = rT
LA
x 2 dA =
m
I,
A y
(8.31)
donde Iy es el momento de inercia del área de la sección transversal de la placa respecto al eje y.
Como la suma de los momentos de inercia de área Ix e Iy es igual al momento
polar de inercia JO, el momento de inercia de masa de la placa delgada respecto al
eje z es igual a la suma de sus momentos de inercia respecto a los ejes x e y:
Ieje z Ieje x Ieje y
Placa delgada
(8.32)
8.5 Objetos simples
Se han expresado los momentos de inercia de masa de una placa delgada homogénea de espesor uniforme en términos de los momentos de inercia del área de la
sección transversal de la placa. De hecho, estos resultados explican por qué las integrales de área Ix, Iy y JO se llaman momentos de inercia. El uso de la misma terminología y símbolos similares para los momentos de inercia de áreas y los momentos de
inercia de objetos puede resultar confuso, pero está muy arraigado en la práctica
de la ingeniería. El tipo de momento de inercia al que se hace referencia puede determinarse a partir del contexto o con base en las unidades: (longitud)4 para los momentos
de inercia de áreas y (masa) (longitud)2 para los momentos de inercia de masas.
RESULTADOS
Momento de inercia de un objeto
El momento de inercia de un objeto respecto a un eje
LO está definido por
dm
IO (8.27)
r2dm,
Lm
donde r es la distancia perpendicular desde LO hasta
el elemento diferencial de masa dm.
r
LO
dm
Barras delgadas
El elemento diferencial de masa dm rAdr, donde r
es la densidad de la barra homogénea y A es el área de
su sección transversal uniforme. El momento de inercia
de la barra de longitud l respecto al eje perpendicular L
a través de su centro de masa es
l/2
I
r2dm rAr2dr r
L
1
rAl3.
12
Lm
L
l/2
En términos de la masa de la barra m rAl,
1
I ml2.
12
dr
l
(8.28)
Placas delgadas
Los momentos de inercia de una placa homogénea delgada
de grosor uniforme y masa m que se encuentra en el plano
x–y puede expresarse en términos de los momentos de inercia del área A de la sección transversal de la placa:
m
(8.30)
I ,
Ieje x A x
m
(8.31)
I ,
Ieje y A y
m
(8.29)
J Ieje x Ieje y.
Ieje z A O
Aquí Ix es el momento de inercia de A respecto al eje x, Iy
es el momento de inercia de A respecto al eje y y JO es el
momento polar de inercia de A respecto al origen.
y
y
A
x
z
411
412
Capítulo 8 Momentos de inercia
Ejemplo activo 8.9
Momento de inercia de una placa triangular ( Relacionado con el problema 8.104)
La placa homogénea delgada que se muestra en la figura tiene espesor uniforme y
masa m. Determine sus momentos de inercia de masa respecto al eje x.
y
h
x
b
Estrategia
El momento de inercia de la placa respecto al eje x está dado por la ecuación (8.30)
en términos del momento de inercia del área de la placa respecto al eje x. El
momento de inercia del área puede obtenerse a partir del apéndice B.
Solución
Del apéndice B,
1
bh3.
Ix 12
Determine el momento de
inercia del área de la placa
respecto al eje x.
El momento de inercia de la placa respecto al eje x es
Ieje x m
Ix
A
m
1
2
bh bh 12
1
3
Aplique la ecuación (8.30).
1
mh2.
6
Problema de práctica Determine el momento de inercia de la placa respecto al eje y.
Respuesta: Ieje y =
1
mb2.
2
413
8.5 Objetos simples
Ejemplo 8.10
Momentos de inercia de una barra delgada ( Relacionado con el problema 8.100)
Dos barras homogéneas esbeltas, cada una con longitud l, masa m y área de sección
transversal A, están soldadas entre sí para formar el objeto en forma de L que se
muestra en la figura. Determine el momento de inercia de masa del objeto respecto al eje LO que pasa por el punto O (el eje LO es perpendicular a las dos barras).
l
Estrategia
Usando el mismo procedimiento de integración empleado para una sola barra, se
determinará el momento de inercia de masa de cada barra respecto a LO y se sumarán los resultados.
O
Solución
El primer paso consiste en introducir un sistema coordenado con el eje z a lo largo
de LO y el eje x colineal con la barra 1 (figura a). La masa del elemento diferencial de
la barra 1 de longitud dx es dm rA dx. El momento de inercia de la barra 1 respecto a LO es
l
LO
y
1
1IO21 =
r dm =
rAx dx = rAl 3.
3
Lm
L0
2
l
2
En términos de la masa de la barra, m rAl, este resultado puede escribirse como
1IO21 =
2
1 2
ml .
3
dm
1
x
O
La masa de un elemento de la barra 2 con longitud dy, que se muestra en la
figura b, es dm rA dy. En la figura se observa que la distancia perpendicular de
LO al elemento es r = 2l2 + y2. Por lo tanto, el momento de inercia de la barra
2 respecto a LO es
1IO22 =
Lm
r 2 dm =
l
L0
rA1l 2
x
dx
(a) Elemento diferencial de la barra 1.
y
dy
4
+ y 22 dy = rAl 3.
3
dm
En términos de la masa de la barra, se obtiene
1IO22 =
r
4 2
ml .
3
El momento de inercia del objeto en forma de L respecto a LO es
IO = 1IO21 + 1IO22 =
y
2
1 2
4
5
ml + ml 2 = ml 2.
3
3
3
Razonamiento crítico
En este ejemplo se usó la integración para determinar un momento de inercia de
un objeto consistente en dos barras rectas. El mismo procedimiento puede aplicarse para objetos más complicados hechos con barras de este tipo, pero obviamente
lo anterior sería tedioso. Una vez que se ha usado la integración para determinar
un momento de inercia de una sola barra, como en la ecuación (8.28), sería conveniente usar ese resultado para determinar momentos de inercia de objetos compuestos hechos de barras sin tener que realizar de nuevo la integración. En la siguiente sección se mostrará cómo hacer esto.
x
O
1
(b) Elemento diferencial de la barra 2.
414
Capítulo 8 Momentos de inercia
Problemas
8.100 El eje LO es perpendicular a los dos segmentos de la
barra en forma de L que se muestra en la figura. La masa de
la barra es de 6 kg y el material es homogéneo. Use el método
descrito en el ejemplo 8.10 para determinar el momento de
inercia de la barra respecto a LO.
8.104 La placa homogénea delgada que se muestra en la figura
tiene una masa m 12 kg y dimensiones b 2 m y h 1 m. Use
el procedimiento descrito en el ejemplo activo 8.9 para determinar
los momentos de inercia de la placa respecto a los ejes x e y.
y
1m
h
x
LO
2m
b
Problema 8.104
Problema 8.100
8.101 Dos barras homogéneas esbeltas, cada una con masa m y
longitud l, están soldadas entre sí para formar un cuerpo en forma
de T. Use integración para determinar el momento de inercia de
masa del cuerpo mostrado respecto al eje que pasa por el punto O
y que es perpendicular a las barras.
8.105 La placa homogénea delgada que se muestra en la figura
tiene espesor uniforme y masa m.
(a) Determine su momento de inercia de masa respecto a los
ejes x y z.
(b) Considere que Ri 0 y compare sus resultados con los valores dados en el apéndice C para una placa circular delgada.
y
Ro
l
O
Ri
l
x
Problema 8.101
8.102 La barra delgada que se muestra en la figura se encuentra en
el plano x-y. Su masa es de 6 kg y el material es homogéneo. Use integración para determinar su momento de inercia respecto al eje z.
8.103 Use integración para determinar el momento de inercia respecto al eje y de la barra delgada de 6 kg que se muestra en la figura.
y
Problema 8.105
8.106 La placa homogénea delgada que se muestra en la figura
tiene espesor uniforme y pesa 20 lb. Determine su momento de
inercia respecto al eje y.
8.107 Determine el momento de inercia de la placa mostrada
respecto al eje x.
y
2m
y4
1 2
x pies
4
50
x
1m
Problemas 8.102/8.103
x
Problemas 8.106/8.107
8.6 Teorema de los ejes paralelos
415
8.6 Teorema de los ejes paralelos
ANTECEDENTES
El teorema de los ejes paralelos permite determinar el momento de inercia de un
objeto respecto a cualquier eje si se conoce el momento de inercia respecto a un eje
paralelo que pasa por el centro de masa. Este teorema puede usarse para calcular
el momento de inercia de un objeto compuesto respecto a un eje, dados los momentos de inercia de cada una de sus partes respecto a ejes paralelos.
Suponga que se conoce el momento de inercia I respecto a un eje L que pasa
por el centro de masa de un objeto, y que se desea determinar su momento de inercia de masa IO respecto a un eje paralelo LO (figura 8.18a). Para determinar IO se
introducen sistemas coordenados paralelos xyz y xyz con el eje z a lo largo de LO
y el eje z a lo largo de L, como se muestra en la figura 8.18b (en esta figura los
ejes LO y L son perpendiculares a la página). El origen O del sistema coordenado
xyz está contenido en el plano x y. Los términos dx y dy son las coordenadas del
centro de masa relativas al sistema coordenado xyz.
El momento de inercia del objeto respecto a LO es
IO =
Lm
r 2 dm =
Lm
1x 2 + y 22 dm,
(8.33)
L
LO
(a)
y
y
donde r es la distancia perpendicular de LO al elemento diferencial de masa dm, mientras que x, y son las coordenadas de dm en el plano x-y. Las coordenadas de dm en
los dos sistemas coordenados se relacionan mediante las siguientes expresiones:
x x d x,
Lm
+
1d x2 + d y22 dm.
Lm
x¿dm + 2dy
Lm
x¿ =
x¿dm
Lm
,
dm
y¿ =
(b)
.
dm
Como el centro de masa del cuerpo está en el origen del sistema xyz, x¿ = 0 y
y¿ = 0. Por lo tanto, las integrales en el segundo y el tercer términos del lado derecho de la ecuación (8.34) son iguales a cero. En la figura 8.18b se observa que
d x2 d y2 d 2, donde d es la distancia perpendicular entre los ejes L y LO. Por lo
tanto, se obtiene
IO I d 2m.
x
y¿dm
y¿dm
Lm
x
O
(8.34)
Lm
dy
d
Como (x)2 (y)2 (r)2, donde r es la distancia perpendicular de L a dm, la
primera integral en el lado derecho de esta ecuación es el momento de inercia I del
objeto respecto a L. Recuerde que las coordenadas x y y del centro de masa
del objeto relativas al sistema coordenado xyz están definidas por
Lm
r
r
31x¿22 + 1y¿224dm + 2dx
Lm
dm
y y d y.
Sustituyendo estas expresiones en la ecuación (8.33), es posible escribir
IO =
dx
(8.35)
Éste es el teorema de los ejes paralelos para momentos de inercia de objetos. La ecuación (8.35) relaciona el momento de inercia I de un objeto respecto a un eje que pasa
por el centro de masa con su momento de inercia IO respecto a cualquier eje paralelo, donde d es la distancia perpendicular entre los dos ejes y m es la masa del objeto.
Figura 8.18
(a) Eje L a través del centro de masa de un
objeto y eje paralelo LO.
(b) Sistemas coordenados xyz y xyz.
416
Capítulo 8 Momentos de inercia
Por lo general, la determinación del momento de inercia de un objeto respecto a un eje dado LO requiere de tres pasos:
1. Seleccionar las partes. Trate de dividir el objeto en partes cuyos momentos de
inercia de masa se conozcan o puedan determinarse con facilidad.
2. Determinar los momentos de inercia de las partes. Primero debe determinar el
momento de inercia de cada parte respecto al eje que pasa por su centro de
masa y es paralelo a LO. Luego se puede usar el teorema de los ejes paralelos
para determinar su momento de inercia respecto a LO.
3. Sumar los resultados. Sume los momentos de inercia de las partes (o reste en
el caso de un agujero o recorte) para obtener el momento de inercia del objeto compuesto.
RESULTADOS
Teorema de los ejes paralelos
El momento de inercia de un objeto con masa m
respecto a un eje LO está dado por
IO I d2m,
d
(8.35)
donde I es el momento de inercia del objeto respecto
a un eje paralelo que pasa por su centro de masa y d
es la distancia perpendicular entre los dos ejes.
_
x1
L
LO
Objetos compuestos
El teorema de los ejes paralelos permite determinar el momento de inercia de un objeto compuesto respecto a un eje dado LO. El momento de inercia de cada parte puede determinarse respecto a
un eje que pasa por el centro de masa de la parte y que es paralelo a LO. Entonces el teorema de
los ejes paralelos puede aplicarse a cada parte para determinar su momento de inercia respecto a
LO. Al sumar los resultados se obtiene el momento de inercia del objeto compuesto respecto a LO.
Ejemplo activo 8.11
Teorema de los ejes paralelos ( Relacionado con el problema 8.111)
La barra homogénea delgada que se muestra en la figura tiene masa m y longitud l.
El eje LO es perpendicular a la barra.
(a) Use integración para determinar el momento de inercia de la barra respecto a LO.
(b) El momento de inercia de la barra respecto a un eje que pasa por su centro de
masa y que es perpendicular a dicha barra es I (1/12)ml2. Use este resultado y el
teorema de los ejes paralelos para determinar el momento de inercia de la barra respecto a LO.
O
l
LO
8.6 Teorema de los ejes paralelos
Solución
l
dm
O
r
El elemento diferencial de masa dm rA dr,
donde r es la densidad de la barra homogénea y
A es el área de su sección transversal. El
momento de inercia es
(a) Integre para
determinar el momento
de inercia respecto a LO.
l
1
IO r dm rAr dr rAl3.
3
Lm
LO
En términos de la masa de la barra m rAl,
1 2
IO ml .
3
2
dr
2
l
2
O
LO
L
IO I d2m
1 2
1 2
l m
ml 12
2
1
ml2.
3
(b) Aplique el teorema de
los ejes paralelos.
Problema de práctica Dos barras homogéneas delgadas, cada una de longitud l y
masa m, se sueldan entre sí para formar el objeto en forma de L que se muestra en la figura. Use el teorema de los ejes paralelos para determinar el momento de inercia del
objeto respecto al eje LO (el eje LO es perpendicular a las dos barras).
l
O
l
LO
Respuesta: IO =
5 2
ml .
3
417
418
Capítulo 8 Momentos de inercia
Ejemplo 8.12
Momento de inercia de un objeto compuesto ( Relacionado con el problema 8.127)
El objeto que se muestra en la figura consiste en una barra de 3 kg soldada a un
disco delgado circular de 2 kg. Determine su momento de inercia respecto al eje L
que pasa por su centro de masa (el eje L es perpendicular a la barra y al disco).
0.2 m
0.6 m
L
Estrategia
Primero se debe localizar el centro de masa del objeto compuesto, y luego aplicar
el teorema de los ejes paralelos a las partes por separado y sumar los resultados.
Solución
Selección de las partes Las partes son la barra y el disco. Introduciendo el sistema coordenado de la figura a, la coordenada x del centro de masa del objeto
compuesto es
x =
=
xbarra mbarra + xdisco mdisco
mbarra + mdisco
10.3 m213 kg2 + 10.6 m + 0.2 m212 kg2
13 kg2 + 12 kg2
= 0.5 m.
y
x
0.3 m
_
x
0.8 m
(a) Coordenada x del centro de masa del
objeto.
Determinación de los momentos de inercia de masa de las partes La distancia desde el centro de masa de la barra al centro de masa del objeto compuesto es
0.2 m (figura b). Por lo tanto, el momento de inercia de masa de la barra respecto
a L es
Ibarra =
1
13 kg210.6 m22 + 13 kg210.2 m22 = 0.210 kg-m2.
12
8.6 Teorema de los ejes paralelos
y
x
0.2 m
(b) Distancia de L al centro de masa
de la barra.
La distancia desde el centro de masa del disco al centro de masa del objeto compuesto es 0.3 m (figura c). El momento de inercia del disco respecto a L es
Idisco =
1
12 kg210.2 m22 + 12 kg210.3 m22 = 0.220 kg-m2.
2
y
x
0.3 m
(c) Distancia desde L hasta el centro de masa
del disco.
Suma de los resultados El momento de inercia del objeto compuesto respecto
a L es
I = Ibarra + Idisco = 0.430 kg-m2.
Razonamiento crítico
En este ejemplo se muestra el procedimiento más común para determinar momentos de inercia de objetos en aplicaciones de ingeniería. Por lo general, los objetos
consisten en ensambles de partes. Se debe determinar el centro de masa de cada
parte y su momento de inercia respecto al eje que pasa por dicho centro de masa
(puede ser necesario determinar esta información de manera experimental, o en
ocasiones los datos son proporcionados por los fabricantes de subensambles).
Después se determina el centro de masa del objeto compuesto y se usa el teorema
de los ejes paralelos para encontrar el momento de inercia de cada parte respecto al
eje que pasa por el centro de masa del objeto compuesto. Por último, los momentos de inercia individuales se suman para obtener el momento de inercia del objeto
compuesto.
419
420
Capítulo 8 Momentos de inercia
Ejemplo 8.13
Momentos de inercia de un cilindro ( Relacionado con los problemas 8.122, 8.123,
8.125, 8.126)
El cilindro homogéneo que se muestra en la figura tiene masa m, longitud l y radio R.
Determine sus momentos de inercia respecto a los ejes x, y y z.
y
x
R
l
z
Estrategia
Primero se determinan los momentos de inercia respecto a los ejes x, y y z de un
elemento infinitesimal del cilindro, que consiste en un disco de espesor dz.
Después se integran los resultados con respecto a z para obtener los momentos de
inercia del cilindro. Se debe aplicar el teorema de los ejes paralelos para determinar los momentos de inercia del disco respecto a los ejes x e y.
Solución
Considere un elemento del cilindro de espesor dz a una distancia z del centro del cilindro (figura a) (es posible imaginar que este elemento se obtiene al “rebanar” el
cilindro perpendicularmente a su eje). La masa del elemento es igual al producto de
la densidad de masa y el volumen del elemento, dm r(pR2dz). Se obtienen los
momentos de inercia del elemento usando los valores para una placa circular delgada dados en el apéndice C. El momento de inercia respecto al eje z es
dIeje z =
1
1
dmR 2 = 1rpR 2 dz2R 2.
2
2
y
x
x
z
z
dz
(a) Elemento diferencial del cilindro en la
forma de un disco.
8.6 Teorema de los ejes paralelos
Al integrar este resultado con respecto a z de l/2 a 1/2, se suman los momentos
de inercia de los elementos infinitesimales de disco que forman el cilindro. El
resultado es el momento de inercia del cilindro respecto al eje z:
l>2
1
1
rpR 4 dz = rp R 4l.
2
2
L-l>2
Ieje z =
Este resultado puede escribirse en términos de la masa del cilindro, m r(pR2l),
como
Ieje z =
1
mR 2.
2
El momento de inercia de masa del elemento de disco respecto al eje x es
dIeje x¿ =
1
1
dm R 2 = 1rpR 2 dz2R 2.
4
4
Puede usarse este resultado y el teorema de los ejes paralelos para determinar el
momento de inercia de masa del elemento respecto al eje x:
dIeje x = dIeje x¿ + z 2 dm =
1
1rpR 2 dz2R 2 + z 21rpR 2 dz2.
4
Integrando esta expresión con respecto a z desde l/2 a l/2, se obtiene el momento de inercia de masa del cilindro respecto al eje x:
l>2
Ieje x =
1
1
1
a rpR 4 + rpR 2z 2 b dz = rpR 4l +
rpR 2l 3.
4
12
L-l>2 4
En términos de la masa del cilindro,
Ieje x =
1
1
mR 2 +
ml 2.
4
12
Debido a la simetría del cilindro,
Ieje y Ieje x.
Razonamiento crítico
Cuando el cilindro es muy largo en comparación con su ancho, l R, el primer
término en la ecuación para Ieje x se puede ignorar y se obtiene el momento de inercia de una barra delgada respecto a un eje perpendicular, ecuación (8.28). Por otro
lado, cuando el radio del cilindro es mucho mayor que su longitud, R I, el
segundo término de la ecuación para Ieje x se puede ignorar y se obtiene el momento de inercia de masa para un disco circular delgado respecto a un eje paralelo al
disco. Esto indica los tamaños de los términos que se desprecian cuando se usan
las expresiones aproximadas para los momentos de inercia de una barra “delgada”
y de un disco “delgado”.
421
422
Capítulo 8 Momentos de inercia
Problemas
8.108 La masa del objeto mostrado es de 10 kg. Su momento
de inercia respecto a L1 es de 10 kg-m2. ¿Qué valor tiene su momento de inercia respecto a L2? (Los tres ejes se encuentran en el
mismo plano).
8.112 La masa de la barra delgada homogénea que se muestra en
la figura es de 20 kg. Determine su momento de inercia respecto
al eje z.
8.113 Determine el momento de inercia de la barra de 20 kg que
se muestra en la figura, respecto al eje z que pasa por su centro de
masa.
y
0.6 m
y
x
0.6 m
L
L1
L2
1m
Problema 8.108
x
8.109 Un ingeniero recaba datos para el diseño de una unidad de
maniobras y determina que el centro de masa del astronauta que
aparece en la figura está en x 1.01 m, y 0.16 m, y que su momento de inercia respecto al eje z es de 105.6 kg-m2. Su masa es
de 81.6 kg. ¿Qué valor tiene su momento de inercia respecto al
eje z que pasa a través de su centro de masa?
y
y
x
x
1.5 m
1m
Problemas 8.112/8.113
8.114 La barra delgada homogénea que se muestra en la figura
pesa 5 lb. Determine su momento de inercia respecto al eje z.
8.115 Determine el momento de inercia de la barra de 5 lb que
se muestra en la figura, respecto al eje z que pasa por su centro de
masa.
y
y
Problema 8.109
8.110 Dos barras delgadas homogéneas, cada una con masa m y
longitud l, se sueldan entre sí para formar el objeto en forma de T
que se muestra en la figura. Use el teorema de los ejes paralelos
para determinar el momento de inercia del objeto respecto al eje
que pasa por el punto O y es perpendicular a las barras.
8.111 Use el teorema de los ejes paralelos para determinar el
momento de inercia del cuerpo en forma de T que se muestra en la
figura, respecto al eje que pasa por el centro de masa del objeto y
que es perpendicular a las dos barras (vea el ejemplo activo 8.11).
4 pulg
x
x
8 pulg
Problemas 8.114/8.115
l
O
l
Problemas 8.110/8.111
423
Problemas
8.116 El cohete mostrado sirve para investigaciones atmosféricas. Su peso y su momento de inercia de masa respecto al eje z
que pasa a través de su centro de masa (incluido el combustible)
son 10 kip y 10,200 slug-pie2, respectivamente. El combustible
pesa 6000 lb, su centro de masa está en x 3 pies, y 0,
z 0, y el momento de inercia del combustible respecto al eje
que pasa por el centro de masa y que es paralelo al eje z es de
2200 slug-pie2. Si el combustible se agota, ¿qué valor tiene
el momento de inercia del cohete respecto al eje que pasa por el
nuevo centro de masa paralelo a z?
8.121 El radiador térmico de la figura (usado para eliminar el
exceso de calor en un satélite) puede modelarse como una placa
homogénea rectangular delgada. Su masa es de 5 slugs. Determine
sus momentos de inercia respecto a los ejes x, y y z.
y
3 pies
6 pies
y
3 pies
x
2 pies
x
Problema 8.116
Problema 8.121
8.117 La masa de la placa delgada homogénea de la figura es de
36 kg. Determine su momento de inercia respecto al eje x.
8.118 Determine el momento de inercia de masa de la placa de
36 kg mostrada, respecto al eje z.
y
0.4 m
8.122 El cilindro homogéneo que se muestra en la figura tiene
masa m, longitud l y radio R. Use la integración como se describió
en el ejemplo 8.13 para determinar su momento de inercia respecto al eje x.
0.4 m
y
0.3 m
x
0.3 m
x
Problemas 8.117/8.118
8.119 La placa delgada homogénea que se muestra en la figura
pesa 10 lb. Determine su momento de inercia respecto al eje x.
R
l
8.120 Determine el momento de inercia de la placa de 10 lb
mostrada, respecto al eje y.
z
y
5 pulg
Problema 8.122
5 pulg
10 pulg
5 pulg
x
Problemas 8.119/8.120
424
Capítulo 8 Momentos de inercia
8.123 El cono homogéneo mostrado tiene masa m. Determine
su momento de inercia respecto al eje z y compare su resultado
con el valor dado en el apéndice C (vea el ejemplo 8.13).
8.124 Determine el momento de inercia del cono homogéneo de
masa m mostrado, respecto a los ejes x e y, y compare su resultado
con el valor dado en el apéndice C.
8.128 La parte de máquina en forma de L que se muestra en la
figura está compuesta por dos barras homogéneas. La barra 1 es
de una aleación de tungsteno con densidad de 14,000 kg/m3, y la
barra 2 es de acero con densidad de 7800 kg/m3. Determine su
momento de inercia respecto al eje x.
y
240 mm
y
1
40 mm
2
80 mm
x
80 mm
z
R
240 mm
x
z
h
Problema 8.128
8.129 El objeto homogéneo que se muestra en la figura es un
cono con un agujero cónico. Sus dimensiones son R1 2 pulg, R2
1 pulg, h1 6 pulg y h2 3 pulg. Está hecho de una aleación
de aluminio con densidad de 5 slug/pie3. Determine su momento
de inercia respecto al eje x.
Problemas 8.123/8.124
y
8.125 La masa de la cuña homogénea que se muestra en la figura es m. Use la integración como se describió en el ejemplo
8.13 para determinar su momento de inercia respecto al eje z (su
respuesta debe estar en términos de m, a, b y h).
x
8.126 La masa de la cuña homogénea que se muestra en la figura es m. Use la integración como se describió en el ejemplo
8.13 para determinar su momento de inercia respecto al eje x (su
respuesta debe estar en términos de m, a, b y h).
R1
R2
y
h1
z
h2
Problema 8.129
x
h
a
z
8.130 El cilindro circular mostrado está hecho de aluminio (Al) con
densidad de 2700 kg/m3 y hierro (Fe) con densidad de 7860 kg/m3.
Determine sus momentos de inercia respecto a los ejes x e y.
b
y
Problemas 8.125/8.126
y
Al
8.127 En el ejemplo 8.12, suponga que una parte de la barra
de 3 kg se corta, de manera que ahora su longitud es de 0.4 m y su
masa es de 2 kg. Determine el momento de inercia del objeto
compuesto respecto al eje perpendicular L que pasa por el centro
de masa del objeto modificado.
z
Fe
600 mm
200 mm
z
600 mm
x, x
Problema 8.130
Problemas de repaso
8.131 La mitad de cilindro homogéneo mostrado tiene masa m.
Determine su momento de inercia de masa respecto al eje L que
pasa por su centro de masa.
R
L
425
8.134 El objeto mostrado está hecho de acero con densidad
r 7800 kg/m3. Determine su momento de inercia respecto
al eje LO.
8.135 Determine el momento de inercia de masa del objeto del
problema 8.134 respecto al eje que pasa por su centro de masa y
es paralelo al eje LO.
20 mm
T
O
Problema 8.131
8.132 La parte de máquina homogénea que se muestra en la figura
está hecha de aleación de aluminio con densidad r 2800 kg/m3.
Determine su momento de inercia respecto al eje z.
100 mm
10 mm
8.133 Determine el momento de inercia de la parte de máquina
descrita en el problema 8.132 respecto al eje x.
y
y
20 mm
x
z
30 mm
LO
Problemas 8.134/8.135
8.136 La placa gruesa que se muestra en la figura está hecha de
acero con densidad r 15 slug/pie3. Determine su momento de
inercia respecto al eje z.
8.137 Determine el momento de inercia de la placa del problema
8.136 respecto al eje x.
40 mm
120 mm
40
mm
Problemas 8.132/8.133
y
y
4 pulg
2 pulg
2 pulg
x
z
4 pulg
4 pulg
8 pulg
4 pulg
4 pulg
Problemas 8.136/8.137
Problemas de repaso
8.138 Determine Iy y ky.
8.142 Determine Iy y ky.
8.139 Determine Ix y kx.
8.143 Determine Ix y kx.
8.140 Determine JO y kO.
8.144 Determine Ixy.
y
8.141 Determine Ixy.
y
1
y x x2
4
(1, 1)
y x2
x
Problemas 8.142–8.144
x
Problemas 8.138–8.141
426
Capítulo 8 Momentos de inercia
8.145 Determine Iy y ky.
8.152 Determine Iy y ky.
8.146 Determine Ix y kx.
8.153 Determine JO y kO.
8.147 Determine Ixy.
y
y
2 pies
y
yx x
1 2
x
4
4 pies
x
Problemas 8.152/8.153
x
Problemas 8.145–8.147
8.154 Determine Ix y kx.
8.155 Determine Iy y ky.
8.148 Determine Iy y ky.
8.149 Determine Ix y kx.
y
y
3 pies
3 pies
40
mm
6 pies
160
mm
x
2 pies 2 pies
x
80
mm
40
mm
Problemas 8.154/8.155
80
mm
Problemas 8.148/8.149
8.156 Los momentos de inercia del área mostrada son Ix 36 m4,
Iy 145 m4 e Ixy 44.25 m4. Determine un conjunto de ejes
principales y los momentos de inercia principales.
8.150 Determine Ix y kx.
8.151 Determine JO y kO.
y
y
3m
4m
40
mm
3m
x
x
160
mm
Problema 8.156
80
mm
40
mm
80
mm
Problemas 8.150/8.151
427
Problemas de repaso
8.157 El momento de inercia del bate de 31 onzas mostrado respecto a un eje perpendicular que pasa por el punto B es de 0.093
slug-pie2. ¿Qué valor tiene el momento de inercia del bate respecto a un eje perpendicular que pasa por el punto A? (El punto A es
el “centro instantáneo” del bate, o centro de rotación, en el instante mostrado).
8.160 La pirámide homogénea mostrada tiene masa m. Determine su momento de inercia respecto al eje z.
8.161 Determine el momento de inercia de la pirámide homogénea de masa m que se muestra en la figura, respecto a los ejes x e y.
y
x
h
C
z
12 pulg
B
Problemas 8.160/8.161
8.162 El objeto homogéneo mostrado pesa 400 lb. Determine su
momento de inercia respecto al eje x.
14 pulg
8.163 Determine el momento de inercia de masa del objeto de
400 lb que se muestra en la figura, respecto a los ejes y y z.
A
y
Problema 8.157
y
8.158 La masa de la placa delgada homogénea que se muestra en
la figura es de 4 kg. Determine su momento de inercia respecto al
eje y.
z
6 pulg
9 pulg
8.159 Determine el momento de inercia de la placa de 4 kg mostrada respecto al eje z.
36 pulg
x
x
36 pulg
46 pulg
Vista lateral
46 pulg
y
Problemas 8.162/8.163
100 mm
8.164 Determine el momento de inercia de masa del volante de
14 kg mostrado respecto al eje L.
140 mm
x
140 mm
50 mm
200 mm
70 mm
120 mm
L
100 mm
Problemas 8.158/8.159
440 mm
500 mm
150 mm
Problema 8.164
CAPÍTULO
9
Fricción
Las fuerzas de fricción tienen muchos efectos importantes, tanto
deseables como indeseables, en las aplicaciones de ingeniería. La
teoría de la fricción de Coulomb permite estimar las fuerzas de
fricción máxima que pueden ejercerse entre superficies en contacto
y las fuerzas de fricción ejercidas por superficies deslizantes. Esto
abre el camino para el análisis de nuevos e importantes tipos de
soportes y máquinas, incluidas cuñas (calzas), conexiones roscadas,
cojinetes y bandas.
䉳 La pieza de trabajo ejerce fuerzas normales y de fricción sobre el disco del
esmeril. En este capítulo se analizan las fuerzas de fricción entre superficies
en contacto.
430
Capítulo 9 Fricción
9.1 Teoría de la fricción seca
ANTECEDENTES
Suponga que una persona sube por una escalera que se encuentra recargada contra
una pared lisa. En la figura 9.1a se muestra el diagrama de cuerpo libre de la persona y la escalera. Si la persona permanece quieta sobre la escalera, pueden usarse las ecuaciones de equilibrio para determinar la fuerza de fricción. Pero hay una
pregunta importante que no puede responderse sólo con las ecuaciones de equilibrio: ¿Permanecerá la escalera en reposo o resbalará sobre el piso? Si un camión
se estaciona sobre un terreno inclinado, la fuerza de fricción ejercida sobre sus
llantas por el camino impide que se deslice cuesta abajo (figura 9.1b). Se pueden
usar las ecuaciones de equilibrio para determinar la fuerza de fricción total. Sin
embargo, surge otra pregunta que no puede contestarse: ¿Cuál es la pendiente que
puede tener el terreno sin que el camión estacionado se deslice?
Para responder estas preguntas es necesario examinar con mayor detalle la
naturaleza de las fuerzas de fricción. Coloque un libro sobre una mesa y empújelo con una pequeña fuerza horizontal, como muestra la figura 9.2a. Si la fuerza que
usted ejerce es suficientemente pequeña, el libro no se moverá. En la figura 9.2b
se muestra el diagrama de cuerpo libre del libro. La fuerza W es el peso del libro
y N es la fuerza normal ejercida por la mesa sobre la superficie del libro que está
en contacto con la mesa. La fuerza F es la fuerza horizontal que usted aplica y f es
la fuerza de fricción ejercida por la mesa. Como el libro está en equilibrio, f F
Ahora incremente lentamente la fuerza aplicada sobre el libro. Mientras éste
permanezca en equilibrio, la fuerza de fricción debe aumentar de manera correspondiente puesto que es igual a la fuerza que se aplica. Cuando la fuerza aplicada
llega a ser muy grande, el libro se deslizará sobre la mesa. Después de alcanzar
cierto valor máximo, la fuerza de fricción ya no puede mantener el libro en equilibrio. Observe también que la fuerza que usted debe aplicar para mantener al libro
en movimiento es menor que la requerida para ocasionar el deslizamiento (usted está
familiarizado con este fenómeno si alguna vez ha empujado un mueble sobre el
piso).
Fuerza de
fricción
Fuerza de fricción
(a)
(b)
Figura 9.1
Objetos soportados mediante fuerzas de fricción.
W
F
f
Figura 9.2
(a) Se ejerce una fuerza horizontal sobre
un libro.
(b) Diagrama de cuerpo libre del libro.
N
(a)
(b)
9.1 Teoría de la fricción seca
¿Cómo ejerce la mesa una fuerza de fricción sobre el libro? ¿Por qué éste se
desliza? ¿Por qué para mantenerlo en movimiento se requiere una fuerza menor
que para empezar a moverlo? Si las superficies de la mesa y del libro se amplifican suficientemente, adquieren un aspecto rugoso (figura 9.3). Las fuerzas de fricción surgen en parte debido a las interacciones de las rugosidades o asperezas de
las superficies en contacto. Se puede obtener mayor conocimiento de este mecanismo de fricción considerando un modelo simple bidimensional de las superficies
rugosas del libro y la mesa.
Considere una idealización de las asperezas del libro y de la tabla, con los
perfiles bidimensionales en forma de “dientes de sierra” que se muestran en la
figura 9.4a. Cuando la fuerza horizontal F se incrementa, el libro permanecerá estático hasta que la fuerza sea suficientemente grande para causar que el libro se
deslice hacia arriba, como muestra la figura 9.4 b. ¿Qué valor tiene la fuerza
horizontal necesaria para que ocurra esto? Para saberlo, se debe determinar el valor
de F necesario para que el libro esté en equilibrio en la posición “deslizada” de la
figura 9.4b. La fuerza normal Ci ejercida sobre la i-ésima aspereza con forma de
diente de sierra del libro se presenta en la figura 9.4c (observe que en este modelo
sencillo se supone que las superficies en contacto de las asperezas son lisas).
Denotando la suma de las fuerzas normales ejercidas por la mesa sobre las asperezas del libro mediante C a Ci, se obtienen las ecuaciones de equilibrio
431
Figura 9.3
Las rugosidades de las superficies pueden
verse en una vista ampliada.
i
Fx F C sen a 0,
Fy C cos a W 0.
Al eliminar C de estas ecuaciones se obtiene la fuerza necesaria para ocasionar que
el libro se deslice sobre la tabla:
F (tan a)W.
Se observa que la fuerza necesaria para ocasionar que el libro se deslice es proporcional a la fuerza que presiona entre sí a las superficies en forma de diente de sierra
(el peso del libro). Considere una situación en la que apila un número creciente de
libros y aplica sobre ellos una fuerza horizontal. A medida que el número de libros
aumenta, se requiere una fuerza progresivamente más grande para ocasionar que los
libros se deslicen. Asimismo, en el experimento imaginario bidimensional, el ángulo
a es una medida de la rugosidad de las superficies con forma de diente de sierra.
Cuando a S 0, las superficies se vuelven lisas y la fuerza necesaria para ocasionar
que el libro se deslice tiende a cero. Cuando a aumenta, la rugosidad se incrementa y
la fuerza necesaria para causar el deslizamiento del libro se vuelve más grande.
y
Figura 9.4
(a) Modelo bidimensional de superficies
rugosas en contacto.
(b) Deslizamiento del libro respecto a la mesa.
(c) Fuerza normal sobre una de las asperezas
del libro.
W
F
x
a
a
a
a
(a)
(b)
Ci
(c)
432
Capítulo 9 Fricción
Las siguientes secciones presentan una teoría que incorpora los fenómenos
básicos que se acaban de describir y que resulta útil para determinar las fuerzas de
fricción entre superficies secas (la fricción entre superficies lubricadas es un fenómeno hidrodinámico y debe analizarse en el contexto de la mecánica de fluidos).
Coeficientes de fricción
TABLA 9.1 Valores típicos del
coeficiente de fricción estática.
Coeficiente de
fricción estática ms
Materiales
Metal sobre metal
Mampostería sobre
mampostería
Madera sobre madera
Metal sobre mampostería
Metal sobre madera
Hule sobre concreto
0.15–0.20
0.60–0.70
0.25–0.50
0.30–0.70
0.20–0.60
0.50–0.90
(a)
Dirección del
deslizamiento inminente
f msN
N
N
f msN
La teoría de la fricción seca, o fricción de Coulomb, predice las fuerzas de fricción
máximas que pueden ser ejercidas por superficies secas en contacto, y que se
encuentran en reposo entre sí. También predice las fuerzas de fricción ejercidas por
las superficies cuando éstas se encuentran en movimiento, o deslizamiento, relativo. Primero se considerarán las superficies que no están en movimiento relativo.
Coeficiente estático La magnitud de la fuerza de fricción máxima que se puede
ejercer entre dos superficies planas, secas, en contacto, que no están en movimiento
relativo entre sí, es
f m s N,
(9.1)
donde N es la componente normal de la fuerza de contacto entre las superficies y
ms es una constante llamada coeficiente de fricción estática. Se supone que el valor
de ms depende sólo de los materiales de las superficies en contacto y de sus condiciones (lisura y grado de contaminación por otros materiales). En la tabla 9.1 se
muestran valores típicos de ms para distintos materiales. El intervalo relativamente
grande de valores para cada par de materiales refleja la sensibilidad de ms respecto
a las condiciones de las superficies. En las aplicaciones de ingeniería suele ser necesario medir el valor de ms para cada una de las superficies reales usadas.
De regreso al ejemplo del libro sobre la mesa (figura 9.2), si se aplica una
fuerza horizontal específica F sobre el libro y éste permanece en equilibrio, ¿qué
valor tiene la fuerza de fricción ejercida por la mesa sobre el libro? En el diagrama de cuerpo libre de la figura 9.2b puede verse que f F. Observe que no se usó
la ecuación (9.1) para responder la pregunta. Pero suponga que se desea conocer la
fuerza máxima F que puede aplicarse al libro sin ocasionar su deslizamiento. Si
se conoce el coeficiente de fricción estática ms entre el libro y la mesa, la ecuación (9.1) indica la fricción máxima que puede ejercer la tabla sobre el libro. Por
lo tanto, la fuerza máxima F que puede aplicarse sin causar que el libro se deslice
es F f msN. Asimismo, a partir del diagrama de cuerpo libre de la figura 9.2b, se
sabe que N W, por lo que la fuerza máxima que no ocasionará que el libro se deslice es F msW.
La ecuación (9.1) determina la magnitud de la fuerza de fricción máxima pero
no su dirección. La fuerza de fricción es un máximo, y la ecuación (9.1) es aplicable si las dos superficies están a punto de deslizarse una con respecto a la otra.
Se dice que el deslizamiento es inminente y que las fuerzas de fricción resisten el
movimiento inminente. Suponga que en la figura 9.5a la superficie inferior está
fija y el deslizamiento de la superficie superior hacia la derecha es inminente. La
fuerza de fricción sobre la superficie superior resistirá este movimiento inminente
(figura 9.5b). La fuerza de fricción sobre la superficie inferior tendrá la dirección
opuesta.
El coeficiente cinético De acuerdo con la teoría de la fricción seca, la magnitud de la fuerza de fricción entre dos superficies planas y secas en contacto, que
están en movimiento (deslizamiento) relativo entre sí, es
(b)
Figura 9.5
(a) La superficie superior está a punto de
deslizarse hacia la derecha.
(b) Direcciones de las fuerzas de fricción.
f mkN,
(9.2)
donde N es la fuerza normal entre las superficies y mk es el coeficiente fricción
cinética. Se supone que el valor de mk depende sólo de las composiciones de las
9.1 Teoría de la fricción seca
433
Figura 9.6
(a) La superficie superior se mueve hacia la
derecha respecto a la superficie inferior.
(b) Direcciones de las fuerzas de fricción.
Dirección del
movimiento relativo
f mk N
N
N
(a)
f m kN
(b)
superficies y de sus condiciones. Para un par de superficies dado, su valor es generalmente menor que el de ms.
Una vez que el libro de la figura 9.2 ha comenzado a deslizarse sobre la mesa,
la fuerza de fricción f mkN mkW. Por lo tanto, la fuerza que debe ejercerse
para mantener el libro en movimiento uniforme es F f mkW.
Cuando dos superficies están deslizándose entre sí, las fuerzas de fricción
resisten el movimiento relativo. Suponga que en la figura 9.6a la superficie inferior
se encuentra fija y que la superficie superior está moviéndose hacia la derecha. La
fuerza de fricción sobre la superficie superior actúa en dirección opuesta a la de su
movimiento (figura 9.6b). La fuerza de fricción sobre la superficie inferior actúa en
la dirección opuesta.
Ángulos de fricción
f
N
(a)
La reacción ejercida sobre una superficie debido a su contacto con otra se ha
expresado en términos de sus componentes paralela y perpendicular a la superficie, la fuerza de fricción f y la fuerza normal N (figura 9.7a). En algunas situaciones es más conveniente expresar la reacción en términos de su magnitud R y del
ángulo de fricción u entre la reacción y la normal a la superficie (figura 9.7b). Las
fuerzas f y N están relacionadas con R y u por
f F sen u,
(9.3)
N R cos u,
(9.4)
El valor de u cuando el deslizamiento es inminente se llama ángulo de fricción
estática us, y su valor cuando las dos superficies están en movimiento relativo se
llama ángulo de fricción cinética uk. Usando las ecuaciones (9.1) a (9.4), los ángulos
de fricción estática y cinética pueden expresarse en términos de los coeficientes de
fricción:
tan us ms,
(9.5)
tan uk mk.
(9.6)
RESULTADOS
Las fuerzas resultantes del contacto entre superficies planas pueden expresarse en
dos formas alternativas:
En términos de la fuerza normal N
y la fuerza de fricción f.
f
N
N
f
R
u
(b)
Figura 9.7
(a) Fuerza de fricción f y fuerza normal N.
(b) Magnitud R y ángulo de fricción u.
434
Capítulo 9 Fricción
u
En términos de la magnitud R y
el ángulo de fricción u.
R
R
u
Coeficientes de fricción
La magnitud de la fuerza de fricción máxima que puede ser ejercida por superficies secas que están en reposo con respecto a la otra (es decir, cuando hay deslizamiento inminente) es
(9.1)
f ⫽ msN,
donde ms el el coeficiente de fricción estática. El ángulo de fricción cuando el deslizamiento es inminente se relaciona con el coeficiente de fricción estática por
(9.5)
tan us ⫽ ms.
La magnitud de la fuerza de fricción ejercida por superficies secas que están en
movimiento (deslizamiento) con respecto a la otra es
f ⫽ mkN,
(9.2)
donde mk es el coeficiente de fricción cinética. El ángulo de fricción cuando las superficies están deslizándose se relaciona con el coeficiente de fricción cinética por
tan uk ⫽ mk
(9.6)
Para evaluar la fuerza y el ángulo de fricción se requiere tomar una serie de decisiones que se resumen en el siguiente diagrama:
Sí
¿Están las superficies en movimiento
relativo (deslizándose) entre sí?
f ⫽ mkN y tan uk ⫽ mk.
La fuerza de fricción se opone al movimiento relativo.
¿Se sabe si el deslizamiento es inminente?
Sí
f ⫽ msN y tan us ⫽ ms.
La fuerza de fricción se opone al movimiento inminente.
No
No
Se deben determinar la magnitud y la dirección de la
fuerza de fricción a partir de
las ecuaciones de equilibrio.
si f ⬎ msN o tan us ⬎ ms,
el sistema no puede estar
en equilibrio.
9.1 Teoría de la fricción seca
Ejemplo activo 9.1
Determinación de una fuerza de fricción (䉴 Relacionado con el problema 9.1)
La cuerda mostrada en la figura ejerce una fuerza horizontal sobre la caja en reposo
de 180 lb. El coeficiente de fricción estática entre la caja y la rampa es ms 0.4. Si
la cuerda ejerce una fuerza de 90 lb sobre la caja, ¿qué valor tiene la fuerza de fricción ejercida por la rampa sobre la caja?
20
Estrategia
La caja no se está deslizando sobre la rampa y no se sabe si el deslizamiento es inminente, por lo que se debe determinar la fuerza de fricción aplicando las ecuaciones de equilibrio.
Solución
y
x
Dibuje el diagrama de cuerpo libre de la caja. La
dirección de la fuerza de fricción f no se conoce,
por lo que debe escogerse de manera arbitraria. El
signo de la respuesta para f indicará su dirección.
T
20
f
W
N
Aplique el equilibrio. El valor negativo de la fuerza de fricción indica que su dirección es hacia abajo
de la rampa.
Calcule la fuerza de fricción máxima que soportará la superficie para
confirmar que no es superada por
la magnitud de la fuerza de fricción necesaria para el equilibrio.
Fx f T cos 20 W sen 20 0,
Fy N T sen 20 W cos 20 0.
Estableciendo W 180 lb y T 90 lb resolviendo
las ecuaciones se obtiene N 200 lb y f 23.0 lb
msN (0.4)(200 lb) 80 lb.
Problema de práctica ¿Qué valor tiene la fuerza horizontal máxima que puede ejercer la cuerda sobre la caja sin ocasionar que ésta empiece a deslizarse hacia arriba sobre
la rampa?
Respuesta: 161 lb.
435
436
Capítulo 9 Fricción
Análisis de un freno de fricción (䉴 Relacionado con el problema 9.22)
Ejemplo 9.2
El movimiento del disco que se muestra en la figura está controlado por la fuerza
de fricción ejercida en C por el freno ABC. El actuador hidráulico BE ejerce una fuerza horizontal F sobre el freno en B. Los coeficientes de fricción entre el disco y el
freno son ms y mk. ¿Qué par M es necesario para que el disco gire con velocidad constante en dirección inversa a la de las manecillas del reloj?
M
C
1
h
2
1
h
2
E
r
D
B
A
b
Estrategia
Puede usarse el diagrama de cuerpo libre del disco para obtener una relación entre
M y la reacción ejercida por el freno sobre el disco, y luego usar el diagrama de
cuerpo libre del freno para determinar la reacción en términos de F.
M
uk
Dx
R
Solución
En la figura a se dibuja el diagrama de cuerpo libre del disco, representando con una
sola fuerza R la fuerza ejercida por el freno. La fuerza R se opone al giro del disco
en contra de las manecillas del reloj, y el ángulo de fricción es el ángulo de fricción
cinética uk arctan mk. Sumando momentos respecto a D, se obtiene
Dy
(a) Diagrama de cuerpo libre del disco.
Mpunto D M (R sen uk)r 0.
Luego, del diagrama de cuerpo libre del freno (figura b), se obtiene
F
1
h
2
1
h
2
1
©Mpunto A = - Fa hb + 1R cos uk2h - 1R sen uk2b = 0.
2
R
b
uk
De estas dos ecuaciones se pueden despejar M y R. La solución para el par M es
A
Ax
M =
Ay
11>22hr F sen uk
h cos uk - b sen uk
=
11>22hr Fmk
h - bmk
.
(b) Diagrama de cuerpo libre del freno.
b
R
k
h
F
A
Ax
Ay
(c) Línea de acción de R pasando por el
punto A.
Razonamiento crítico
Si el coeficiente de fricción mk es suficientemente pequeño, el denominador de la
solución para el par M, el término h cos uk b sen uk, es positivo. Al crecer mk, el
denominador se vuelve más pequeño porque cos uk se reduce y sen uk aumenta.
Cuando el denominador se acerca a cero, el par requerido para que el disco gire
tiende a infinito. Para entender este resultado, observe que el denominador es igual
a cero cuando tan uk hb, lo que significa que la línea de acción de la fuerza R
pasa por el punto A (figura c). Cuando mk crece y la línea de acción de R se acerca
al punto A, la magnitud de R necesaria para equilibrar el momento de F respecto a
A tiende a infinito. Como resultado, la predicción analítica para M tiende también
a infinito. Por supuesto, en algún valor de M, las fuerzas F y R excederían los valores que el freno podría soportar.
437
9.1 Teoría de la fricción seca
Determinación del vuelco de un objeto (䉴 Relacionado con el problema 9.45)
Ejemplo 9.3
Suponga que se desea empujar la caja de herramientas mostrada en la figura sobre
el piso aplicando la fuerza horizontal F. Si se aplica la fuerza a una altura h muy grande, la caja se volcará antes de deslizarse. Si el coeficiente de fricción estática entre
el piso y la caja es ms, ¿cuál es el máximo valor de h para que la caja se deslice
antes de volcarse?
F
h
Estrategia
Cuando la caja está a punto de volcarse, se encuentra en equilibrio sin ninguna reacción en B. Se puede usar esta condición para determinar F en términos de h.
Luego, determinando el valor de F que hará que la caja se deslice, se obtendrá el
valor de h que ocasionará que la caja esté a punto de volcarse y a punto de deslizarse.
Solution
En la figura a se dibuja el diagrama de cuerpo libre de la caja cuando está a punto
de volcarse. Sumando momentos respecto a A, se obtiene
W
A
B
b
2
b
2
y
1
©Mpunto A = Fh - Wa bb = 0.
2
F
El equilibrio también requiere que f F y N W.
Cuando la caja está a punto de deslizarse,
h
f msN,
W
por lo que
A
F f msN msW.
Sustituyendo esta expresión en la ecuación de momentos, se obtiene
1
msWh - Wa bb = 0.
2
Despejando h de esta ecuación se encuentra que cuando la caja está a punto de deslizarse, también se encuentra a punto de voltearse si ésta se empuja a la altura
h =
b
.
2ms
Si h es menor que este valor, la caja empezará a deslizarse antes de volcarse.
Razonamiento crítico
Observe que el máximo valor de h para que la caja se deslice antes de volcarse es
independiente de F. Si la caja se vuelca o no depende sólo de dónde se aplica la carga
y no de la magnitud de ésta. ¿Cuál es la motivación para la solución en este ejemplo? La posibilidad de caída de objetos pesados es un riesgo obvio a la seguridad,
y los análisis de este tipo pueden influenciar su diseño. Una vez que dichos objetos
estén en uso, los ingenieros de seguridad pueden establecer directrices para evitar
un vuelco (por ejemplo, marcando una línea horizontal sobre un gabinete vertical
o una máquina arriba de la cual no debe empujarse).
B
f
N
x
b
2
(a) Diagrama de cuerpo libre cuando la caja
está a punto de volcarse.
438
Capítulo 9 Fricción
Problemas
䉴 9.1 En el ejemplo activo 9.1, suponga que el coeficiente de
fricción estática entre la caja de 180 lb y la rampa es ms 0.3.
¿Cuál es la magnitud de la fuerza horizontal mínima que debe
ejercer la cuerda sobre la caja para evitar que ésta se deslice hacia
abajo por la rampa?
9.2 Una persona coloca un libro de 2 lb sobre una mesa que
está inclinada 15° respecto a la horizontal. La persona encuentra
que si ejerce una fuerza muy pequeña sobre el libro, como
muestra la figura, el libro permanece en equilibrio, pero si retira
la fuerza el libro se desliza hacia abajo sobre la mesa. ¿Qué
fuerza debe ejercer esta persona sobre el libro (en la dirección
paralela a la mesa) para causar que éste se deslice hacia arriba
sobre la mesa?
9.4 El automóvil de 2975 lb que se muestra en la figura está estacionado sobre una calle inclinada. Los frenos están aplicados tanto
en sus ruedas delanteras como traseras.
a) Si el coeficiente de fricción estática entre las llantas del
automóvil y el camino es ms 0.8, ¿cuál es la pendiente más
inclinada (en grados respecto a la horizontal) sobre la cual el
automóvil podría permanecer en equilibrio?
b) Si la calle estuviera cubierta de hielo y el coeficiente de fricción
estática entre las llantas del automóvil y el camino fuera ms 0.2,
¿cuál es la pendiente más inclinada sobre la cual el automóvil podría
permanecer en equilibrio?
15
Problema 9.4
Problema 9.2
9.3 Un estudiante empuja una caja de libros de 200 lb sobre el
piso. El coeficiente de fricción cinética entre la alfombra y la caja
mostradas es mk 0.15.
a) Si él ejerce la fuerza F en un ángulo a 25°, ¿cuál es la
magnitud de la fuerza que debe ejercer para deslizar la caja
sobre el piso?
b) Si él dobla más sus rodillas y ejerce la fuerza F en un ángulo
a 10°, ¿cuál es la magnitud de la fuerza que debe ejercer para
deslizar la caja?
9.5 El cabrestante del camión mostrado ejerce una fuerza horizontal
sobre la caja de 200 kg en un esfuerzo por jalarla hacia abajo sobre
la rampa. El coeficiente de fricción estática entre la caja y la rampa
es ms 0.6.
a) Si el cabrestante ejerce una fuerza horizontal de 200 N sobre la
caja, ¿cuál es la magnitud de la fuerza de fricción ejercida por la
rampa sobre la caja?
b) ¿Cuál es la magnitud de la fuerza horizontal que debe ejercer
el cabrestante sobre la caja para ocasionar que ésta empiece a
moverse hacia abajo sobre la rampa?
Problema 9.5
a
F
20
9.6 El dispositivo de la figura está diseñado para colocar maletas
sobre una rampa y ejerce una fuerza paralela a ésta. La maleta
mostrada pesa 40 lb. Los coeficientes de fricción entre la maleta y
la rampa son ms 0.20 y mk 0.18.
a) ¿La maleta permanecerá en reposo sobre la rampa cuando el
dispositivo no ejerza fuerza sobre ella?
b) ¿Qué fuerza debe ejercer el mecanismo sobre la maleta para
empujarla hacia arriba sobre la rampa a una velocidad constante?
Problema 9.3
20
Problema 9.6
Problemas
9.7 El coeficiente de fricción estática entre la caja de 50 kg
que se muestra en la figura y la rampa es ms 0.35. La longitud
sin estirar del resorte es de 800 mm, y la constante del resorte
es k 660 N/m. ¿Cuál es el valor mínimo de x con el que la
caja puede permanecer en reposo sobre la rampa?
439
9.12 La masa de la caja que se muestra a la izquierda es de 30 kg
y la masa de la caja a la derecha es de 40 kg. El coeficiente de fricción estática entre cada caja y la superficie inclinada es ms 0.2.
Determine el ángulo mínimo a para el cual las cajas permanecerán
en reposo.
x
Problema 9.12
a
30
k
9.13 El coeficiente de fricción cinética entre la caja de 100 kg
que se muestra en la figura y la superficie inclinada es 0.35.
Determine la tensión T necesaria para jalar la caja hacia arriba
de la superficie a una velocidad constante.
50
Problema 9.7
9.8 El coeficiente de fricción cinética entre la caja de 40 kg que
se muestra en la figura y el piso inclinado es mk 0.3. Si el ángulo
a 20°, ¿qué tensión debe ejercer la persona sobre la cuerda para
mover la caja a velocidad constante?
T
9.9 En el problema 9.8, ¿para qué ángulo a la tensión necesaria
para mover la caja a velocidad constante es mínima? ¿Qué valor
tiene la tensión necesaria?
60
Problema 9.13
a
10
Problemas 9.8/9.9
9.10 La caja A de la figura pesa 100 lb y la caja B 30 lb. Los
coeficientes de fricción entre la caja A y la rampa son ms 0.30
y mk 0.28. ¿Cuál es la magnitud de la fuerza de fricción ejercida
sobre la caja A por la rampa?
9.11 La caja A de la figura pesa 100 lb y los coeficientes de fricción
entre la caja A y la rampa son ms 0.30 y mk 0.28. ¿Para qué
intervalo de pesos de la caja B el sistema permanece en reposo?
9.14 La caja mostrada está en reposo sobre la superficie inclinada.
El coeficiente de fricción estática es ms.
a) Si la masa de la caja es 10 kg, a 20°, b 30° y ms 0.24,
¿cuál es la fuerza T necesaria para que la caja empiece a deslizarse
hacia arriba sobre la superficie?
b) Demuestre que la fuerza T necesaria para que la caja empiece a
deslizarse hacia arriba por la superficie es el valor mínimo cuando
tan b ms.
9.15 Para explicar las observaciones hechas durante la botadura
de barcos en el puerto de Rochefort en 1779, Coulomb analizó el
sistema mostrado a fin de determinar la fuerza T mínima necesaria
para mantener la caja en reposo sobre la superficie inclinada.
Demuestre que el resultado es
1sen a - ms cos a2mg
T =
.
cos b - ms sen b
T
b
A
B
30
a
Problemas 9.10/9.11
Problemas 9.14/9.15
440
Capítulo 9 Fricción
9.16 Dos hojas de madera terciada A y B yacen sobre la plataforma del camión mostrado. Ambas tienen el mismo peso W, y
el coeficiente de fricción estática entre las dos hojas de madera
y entre la hoja B y la plataforma del camión es ms.
a) Si usted aplica una fuerza horizontal a la hoja A y ninguna
fuerza a la hoja B, ¿puede deslizar la hoja A hacia afuera del
camión sin hacer que se mueva la hoja B? ¿Qué fuerza es necesaria para que la hoja A empiece a deslizarse?
b) Si usted impide que la hoja A se mueva ejerciendo una fuerza
horizontal sobre ella, ¿qué fuerza horizontal sobre la hoja B se
necesita para que ésta empiece a deslizarse?
9.19 Cada una de las cajas mostradas pesa 10 lb. El coeficiente
de fricción estática entre la caja A y la caja B es 0.24 y el coeficiente de fricción estática entre la caja B y la superficie inclinada
es 0.3 ¿Cuál es el máximo ángulo a para el cual la caja B no se
deslizará?
Estrategia: Dibuje diagramas de cuerpo libre individuales de
las dos cajas y escriba sus ecuaciones de equilibrio suponiendo
que el deslizamiento de la caja B es inminente.
A
B
a
Problema 9.19
A
B
9.20 Las masas de las cajas mostradas son mA 15 kg y
mB 60 kg. El coeficiente de fricción estática entre las cajas
A y B y entre la caja B y la superficie inclinada es 0.12. ¿Qué
valor tiene la máxima fuerza F que no ocasionará que las cajas
se deslicen?
9.21 En el problema 9.20, ¿cuál es la fuerza F mínima para la
cual las cajas no se deslizarán?
Problema 9.16
9.17 Los pesos de las dos cajas mostradas son W1 100 lb y
W2 50 lb. Los coeficientes de fricción entre la caja de la izquierda
y la superficie inclinada son ms 0.12 y mk 0.10. Determine
la tensión que debe ejercer el hombre sobre la cuerda para jalar
las cajas hacia arriba a una velocidad constante.
F
A
B
9.18 En el problema 9.17, ¿para qué intervalo de tensiones ejercidas por el hombre sobre la cuerda las cajas permanecerán en reposo?
20
Problemas 9.20/9.21
30
W1
䉴 9.22 En el ejemplo 9.2, ¿qué par M en el sentido de las manecillas del reloj necesitaría aplicarse al disco para causar que éste
gire a una velocidad constante en la misma dirección?
30
W2
Problemas 9.17/9.18
Problemas
441
9.23 La barra homogénea horizontal AB que se muestra en la figura pesa 20 lb. El disco homogéneo pesa 30 lb. El coeficiente de fricción cinética entre el disco y la superficie inclinada es mk 0.24. ¿Cuál es la magnitud del par que necesitaría aplicarse al disco para
ocasionar que éste gire a una velocidad constante en el sentido de las manecillas del reloj?
9.24 La barra homogénea horizontal AB que se muestra en la figura pesa 20 lb. El disco homogéneo pesa 30 lb. El coeficiente de fricción cinética entre el disco y la superficie inclinada es mk 0.24. ¿Cuál es la magnitud del par que necesitaría aplicarse al disco para
ocasionar que este gire a una velocidad constante en sentido inverso al de las manecillas del reloj?
5 pies
1 pie
A
B
20
Problemas 9.23/9.24
9.25 La masa de la barra mostrada es 4 kg. El coeficiente de
fricción estática entre la barra y el piso es 0.3. Ignore la fricción
entre la barra y la pared.
a) Si a 20°, ¿cuál es la magnitud de la fuerza de fricción ejercida
por el piso sobre la barra?
b) ¿Cuál es el valor máximo de a para el cual la barra no se
deslizará?
9.26 El coeficiente de fricción estática entre la barra de 4 kg y el
piso, y entre la barra y la pared es 0.3 que se muestra en la figura
(9.25/9.26). ¿Cuál es el ángulo máximo a para el cual la barra no
se deslizará?
9.28 La escalera y la persona mostradas pesan 30 lb y 180 lb,
respectivamente. El centro de masa de la escalera de 12 pies de
longitud está en su punto medio. El coeficiente de fricción estática
entre la escalera y el piso es ms 0.5. ¿Cuál es el valor máximo
de a para el que la persona puede alcanzar la parte superior de
la escalera sin que ésta se deslice?
9.29 La escalera y la persona mostradas pesan 30 lb y 180 lb, respectivamente. El centro de masa de la escalera de 12 pies de longitud
está en su punto medio. El coeficiente de fricción estática entre
la escalera y el piso es 0.5 y el coeficiente de fricción entre la escalera
y la pared es 0.3. ¿Cuál es el valor máximo del ángulo a para el que
la persona puede alcanzar la parte superior de la escalera sin que ésta
se deslice? Compare su respuesta con la del problema 9.28.
1m
a
a
Problemas 9.25/9.26
9.27 La escalera y la persona mostradas pesan 30 lb y 180 lb,
respectivamente. El centro de masa de la escalera de 12 pies de
longitud está en su punto medio. El ángulo a 30°. Suponga
que la pared ejerce una fricción insignificante sobre la escalera.
a) Si x 4 pies, ¿cuál es la magnitud de la fuerza de fricción
ejercida por el piso sobre la escalera?
b) ¿Cuál es el coeficiente mínimo de fricción estática entre la escalera y el piso, necesario para que la persona sea capaz de llegar
a la parte superior de la escalera sin que ésta se deslice?
x
Problemas 9.27–9.29
442
Capítulo 9 Fricción
9.30 El disco de la figura pesa 50 lb y la barra pesa 25 lb. Los
coeficientes de fricción entre el disco y la superficie inclinada
son ms 0.6 y mk 0.5.
a) ¿Cuál es el par máximo M que puede aplicarse al disco en reposo
sin ocasionar que éste empiece a girar?
b) ¿Cuál es el par M necesario para girar al disco a una velocidad
constante?
9.34 El coeficiente de fricción estática entre las hojas de las
pinzas la figura y el objeto sujetado es 0.36. ¿Cuál es el valor
máximo del ángulo a para el que el objeto sujetado no se desliza?
Ignore el peso del objeto.
Estrategia: Dibuje el diagrama de cuerpo libre del objeto y
suponga que el deslizamiento es inminente.
5 pulg
20 pulg
a
M
Problema 9.34
30
Problema 9.30
9.31 El radio del cilindro homogéneo de 40 kg que se muestra
en la figura es R 0.15 m. La pared inclinada es lisa y el ángulo
a 30°. El coeficiente de fricción estática entre el cilindro y el
piso es ms 0.2. ¿Cuál es el par máximo M que puede aplicarse
al cilindro sin causar que éste deslice?
9.32 El cilindro homogéneo que se muestra en la figura tiene
un peso W. El coeficiente de fricción estática entre el cilindro y
ambas superficies es ms. ¿Cuál es el par máximo M que puede
aplicarse al cilindro sin causar que éste deslice? (Suponga que el
cilindro se desliza antes de rodar hacia arriba sobre la superficie
inclinada.)
9.33 El cilindro homogéneo que se muestra en la figura tiene
un peso W. El coeficiente de fricción estática entre el cilindro y
ambas superficies es ms. ¿Cuál es el valor mínimo de ms con el
que el par M causará que el cilindro ruede hacia arriba sobre la
superficie inclinada sin deslizarse?
R
M
a
Problemas 9.31–9.33
9.35 Un disco en reposo de 300 mm de radio está unido a un
soporte de pasador en D como muestra la figura. El disco es
mantenido en posición por el freno ABC en contacto con el disco
en C. El actuador hidráulico BE ejerce una fuerza horizontal de
400 N sobre el freno en B. Los coeficientes de fricción entre el
disco y el freno son ms 0.6 y mk 0.5. ¿Qué par debe aplicarse
al disco en reposo para que se deslice en dirección opuesta a la
de las manecillas del reloj?
C
200 mm
E
B
200 mm
A
200
mm
Problema 9.35
300
mm
D
Problemas
9.36 En la figura se muestra una idea conceptual preliminar de
un dispositivo que ejerce una fuerza de frenado sobre una cuerda
cuando la cuerda es jalada hacia abajo por la fuerza T. El coeficiente de fricción cinética entre la cuerda y las dos barras es
mk 0.28. Determine la fuerza T necesaria para jalar la cuerda
hacia abajo a una velocidad constante si F 10 lb y a) a 30°;
b) a 20°.
6 pulg
F
F
lg
u
3p
F
F
443
9.39 La barra horizontal mostrada en la figura está unida a un
collarín que se desliza sobre la barra vertical. El collarín en P se
desliza sobre la barra horizontal lisa. La masa total de la barra
horizontal y los dos collarines es de 12 kg. El sistema se mantiene
en posición mediante el pasador y la ranura circular. El pasador
hace contacto sólo con la superficie inferior de la ranura, y el
coeficiente de fricción estática entre el pasador y la ranura es 0.8.
Si el sistema se encuentra en equilibrio y y 260 mm, ¿cuál es
la magnitud de la fuerza de fricción ejercida por la ranura sobre
el pasador?
9.40 En el problema 9.39, ¿cuál es la altura y mínima a la que el
sistema puede estar en equilibrio?
a
a
T
T
P
Problema 9.36
9.37 La masa del bloque B mostrado es 8 kg. El coeficiente de
fricción estática entre las superficies de la abrazadera y el bloque
es ms 0.2. Cuando la abrazadera está alineada como se muestra,
¿qué fuerza mínima debe ejercer el resorte para impedir que el
bloque se deslice?
9.38 Modificando sus dimensiones, rediseñe la abrazadera del
problema 9.37 de manera que la fuerza mínima que el resorte
deba ejercer para impedir el deslizamiento del bloque sea de
180 N. Haga un bosquejo de su nuevo diseño.
45
160 mm
y
300 mm
Problemas 9.39/9.40
9.41 La placa rectangular de 100 lb que se muestra en la figura
está soportada por los pasadores A y B. Si se puede ignorar la fricción en A y el coeficiente de fricción estática entre el pasador en B
y la ranura es ms 0.4, ¿cuál es el máximo ángulo a con el que la
placa no se deslizará?
9.42 Si se puede ignorar la fricción en el punto B de la figura y
el coeficiente de fricción estática entre el pasador en A y la ranura
es ms 0.4, ¿cuál es el máximo ángulo a con el que la placa de
100 lb no se deslizará?
200 mm
a
2 pies 3 pulg
B
B
A
100
mm
Problemas 9.37/9.38
2
pies
2
pies
Problemas 9.41/9.42
444
Capítulo 9 Fricción
9.43 El peso del avión mostrado es W 2400 lb. Sus frenos
mantienen bloqueadas las ruedas traseras y el coeficiente de
fricción estática entre las ruedas y la pista es ms 0.6. La rueda
frontal (nariz) puede girar libremente y también ejerce una fuerza
de fricción insignificante sobre la pista. Determine la fuerza de
empuje horizontal máxima T que puede generar la hélice sin
ocasionar que las ruedas traseras se deslicen.
9.46 Para obtener una evaluación preliminar de la estabilidad
de un automóvil nuevo, imagine que se somete el automóvil en
reposo a una fuerza lateral creciente F a la altura de su centro
de masa, y determine si el carro se deslizará lateralmente antes de
volcarse. Muestre que éste será el caso si bh 2ms (observe la
importancia de la altura del centro de masa respecto al ancho del
automóvil: lo anterior refleja análisis recientes sobre la estabilidad de vehículos utilitarios deportivos y camionetas que tienen
centros de masa relativamente altos).
T
F
4 pies
W
A
h
B
5 pies
2 pies
b
2
Problema 9.43
b
2
Problema 9.46
9.44 El refrigerador de la figura pesa 220 lb. Se encuentra soportado en A y B. El coeficiente de fricción estática entre los soportes
y el piso es ms 0.2. Asumiendo que el refrigerador no se volteará
antes de deslizarse, ¿cuál es la fuerza F necesaria para que el
deslizamiento sea inminente?
䉴 9.45 El refrigerador de la figura pesa 220 lb. Se encuentra
soportado en A y B. El coeficiente de fricción estática entre los
soportes y el piso es ms 0.2. La distancia h 60 pulg y la dimensión b 30 pulg. Cuando se aplica la fuerza F para empujar
al refrigerador sobre el piso, ¿se volcará antes de deslizarse?
(Vea el ejemplo 9.3).
9.47 El hombre que se muestra en la figura ejerce una fuerza P
sobre el automóvil en un ángulo a 20°. El automóvil de
1760 kg tiene tracción delantera. El conductor gira las ruedas
frontales, y el coeficiente de fricción cinética es mk 0.02. La
nieve detrás de las llantas traseras ejerce una fuerza de resistencia S.
Para comenzar a mover el automóvil se requiere superar una
fuerza S 420 N ejercida por la nieve sobre las llantas traseras.
¿Qué fuerza debe ejercer el hombre?
9.48 En el problema 9.47, ¿qué valor del ángulo a minimiza la
magnitud de la fuerza P que debe ejercer el hombre para superar
la fuerza de resistencia S 420 N ejercida por la nieve sobre las
llantas traseras? ¿Cuál es la fuerza que debe ejercer el hombre?
F
h
A
B
b
2
b
2
P
a
Problemas 9.44/9.45
0.90 m
S
1.62 m
2.55 m
3.40 m
Problemas 9.47/9.48
Problemas
9.49 El coeficiente de fricción estática entre las llantas del automóvil de 3000 lb y la calle es ms 0.5. Determine la pendiente
máxima (valor máximo del ángulo a) que el automóvil puede
subir a velocidad constante si tiene a) tracción en las ruedas
traseras, b) tracción en las ruedas delanteras o c) tracción en las
cuatro ruedas.
ulg
19 p
9.51 La mesa mostrada pesa 50 lb y el coeficiente de fricción
estática entre sus patas y la superficie inclinada es 0.7.
a) Si se aplica una fuerza en A, paralela a la superficie inclinada
para empujar la mesa hacia arriba sobre dicho plano inclinado, ¿la
mesa se volcará antes de deslizarse? Si no es así, ¿qué fuerza se
requiere para que la mesa empiece a moverse sobre la superficie?
b) Si se aplica una fuerza en B, paralela a la superficie inclinada
para empujar la mesa hacia abajo sobre dicho plano inclinado, ¿la
mesa se volcará antes de deslizarse? Si no es así, ¿qué fuerza se
requiere para que la mesa empiece a moverse sobre la superficie?
B
ulg
35 p
32 pulg
ulg
72 p
a
445
28 pulg
A
Problema 9.49
23 pulg
23 pulg
9.50 El armario en reposo que se muestra tiene un peso W.
Determine la fuerza F que se debe ejercer para que se mueva si
a) el coeficiente de fricción estática en A y en B es ms; b) el
coeficiente de fricción estática en A es msA y el coeficiente de
fricción estática en B es msB.
F
h
H
A
B
Problema 9.50
Problema 9.51
9.52 El coeficiente de fricción estática entre la barra de la derecha y la superficie en A es ms 0.6. Ignore los pesos de las barras. Si a 20°, ¿cuál es la magnitud de la fuerza de fricción
ejercida en A?
G
b
2
20
9.53 El coeficiente de fricción estática entre la barra de la derecha
y la superficie en A es ms 0.6. Ignore los pesos de las barras.
¿Cuál es el ángulo máximo a para el que la armadura permanecerá
en reposo sin resbalar?
b
2
F
a
a
A
Problemas 9.52/9.53
446
Capítulo 9 Fricción
9.54 La barra BC está soportada por un piso rugoso en C. Si
F 2 kN y la barra BC no se desliza en C, ¿cuál es la magnitud
de la fuerza de fricción ejercida sobre la barra en C?
9.55 La barra BC está soportada por un piso rugoso en C. Si
F 2 kN, ¿cuál es el valor mínimo del coeficiente de fricción
estática para que la barra BC no se deslice en C?
F
B
A
600 mm
500 mm
9.58 Suponga que las longitudes de las barras del problema 9.57
son LAB 1.2 m y LAC 1.0 m y sus masas son mAB 3.6 kg y
mAC 3.0 kg.
a) ¿Cuál es la magnitud de la fuerza de fricción ejercida sobre la
placa en B?
b) ¿Cuál es el coeficiente de fricción estática mínimo necesario
para que la estructura permanezca en equilibrio?
C
500 mm
9.57 La masa del objeto suspendido que se muestra en la figura es
de 6 kg. La estructura está soportada en B por las fuerzas normal
y de fricción ejercidas por la pared sobre la placa. Ignore los pesos
de las barras.
a) ¿Qué magnitud tiene la fuerza de fricción ejercida sobre la
placa en B?
b) ¿Cuál es el coeficiente de fricción estática mínimo necesario
para que la estructura permanezca en equilibrio?
200
mm
C
Problemas 9.54/9.55
30
9.56 El peso de la caja mostrada es 20 lb y el coeficiente de
fricción estática entre la caja y el piso es ms 0.65. Ignore los
pesos de las barras. ¿Cuál es el valor máximo de la fuerza F que
no ocasionará que la caja se deslice?
4
pulg
4
pulg
Placa
A
8
B
8 pulg
Problemas 9.57/9.58
F
8 pulg
9.59 El bastidor de la figura está soportado por la fuerza normal
y de fricción ejercidas por las superficies fijas sobre las placas en
A y G. El coeficiente de fricción estática en A es ms 0.6. ¿Se
deslizará el bastidor en A cuando se someta a las cargas mostradas?
1m
1m
1m
6 kN
A
B
C
Problema 9.56
1m
8 kN
1m
G
E
D
Problema 9.59
Problemas
9.60 El bastidor de la figura está soportado mediante la fuerza
normal y de fricción ejercidas por la pared sobre la placa en A.
a) ¿Cuál es la magnitud de la fuerza de fricción ejercida sobre la
placa en A?
b) ¿Cuál es el coeficiente de fricción estática mínimo en A
necesario para que la estructura permanezca en equilibrio?
447
9.62* El disco de metal A de 10 lb que se muestra en la figura
está en el centro de la superficie inclinada. La tensión en el cordón
AB es de 5 lb. ¿Cuál es el valor mínimo del coeficiente de fricción
estática entre el disco y la superficie, necesario para que el disco
no se deslice?
y
E
B
(0, 6, 0) pies
6 kN
1m
D
C
2 pies
x
1m
A
A
B
2m
8 pies
10 pies
2m
z
1m
Problema 9.62
Problema 9.60
9.61 Los cosenos directores del cable de la grúa son
cos ux 0.588, cos uy 0.766, cos uz 0.260. El eje y es vertical.
El cajón en reposo al cual está unido el cable pesa 2000 lb y yace
sobre el suelo horizontal. Si el coeficiente de fricción estática
entre el cajón y el suelo es ms 0.4, ¿qué tensión es necesaria en el
cable para ocasionar que el cajón se deslice?
y
9.63* La caja de 5 kg que se muestra en la figura está en reposo
sobre la superficie inclinada. El eje y apunta hacia arriba. El vector
unitario 0.557i 0.743j 0.371k es perpendicular al plano inclinado. ¿Cuál es la magnitud de la fuerza de fricción ejercida por la
superficie sobre la caja?
9.64* En el problema 9.63, ¿cuál es el valor mínimo del coeficiente
de fricción estática para que la caja permanezca en reposo sobre la
superficie inclinada?
y
x
z
Problema 9.61
x
z
Problemas 9.63/9.64
448
Capítulo 9 Fricción
9.2 Cuñas
Una cuña es una herramienta bifacial cuyas caras forman un pequeño ángulo agudo
(figuras 9.8a y b). Cuando una cuña se empuja hacia adelante, sus caras ejercen
grandes fuerzas laterales como resultado del pequeño ángulo entre ellas (figura
9.8c). Las cuñas se usan de varias maneras en muchas aplicaciones de ingeniería.
Las grandes fuerzas laterales generadas por una cuña se pueden usar para levantar una carga (figura 9.9a). Sea WL el peso de la carga y WW, el peso de la cuña. Para
determinar la fuerza F necesaria para empezar a elevar la carga, se supone que el deslizamiento de la carga y de la cuña es inminente (figura 9.9b). A partir del diagrama
de cuerpo libre de la carga se obtienen las ecuaciones de equilibrio
Fx Q N sen a msN cos a 0
y
Fy N cos a msN sen a msQ WL 0.
(a)
(b)
Figura 9.8
(a) Cuña primitiva: un “hacha manual” de
Olduvai Gorge, África Oriental.
(b) Hoja de cincel moderno.
(c) Las caras de una cuña pueden ejercer
grandes fuerzas laterales.
(c)
y
y
Carga
Q
Cuña
N
m sQ
F
a
W
WLL
a
m sN
N
F
WWW
W
a
x
x
P
(a)
msN
(b)
Figura 9.9
(a) Elevación de una carga por medio de una cuña.
(b) Diagramas de cuerpo libre de la carga y de la cuña cuando el deslizamiento es inminente.
msP
9.2 Cuñas
449
Del diagrama de cuerpo libre de la cuña se obtienen las ecuaciones
Fx N sen a msN cos a msP F 0
y
Fy P N cos a msN sen a WW 0.
Estas cuatro ecuaciones determinan las fuerzas normales Q, N y P y la fuerza F.
La solución para F es
F = msWW + c
11 - m2s 2 tan a + 2ms
11 - m2s 2 - 2ms tan a
dWL.
Suponga que WW 0.2WL y a 10°. Si ms 0, la fuerza necesaria para elevar la
carga es sólo 0.176WL. Pero si ms 0.2, la fuerza resulta de 0.680WL y si ms 0.4,
la fuerza requerida es de 1.44WL. Desde este punto de vista, la fricción es indeseable.
Pero si no hubiera fricción, la cuña no podría permanecer en su posición cuando se
retirara la fuerza F.
Ejemplo activo 9.4
Fuerzas sobre una cuña (䉴 Relacionado con los problemas 9.65, 9.66, 9.67)
Se usa una cuña para partir un tronco. El ángulo a 10° y los coeficientes de fricción entre la cuña y el tronco son ms 0.22 y mk 0.20. Si la cuña se introduce en
el tronco con velocidad constante mediante una fuerza vertical F, ¿qué magnitud tienen las fuerzas normales ejercidas por la cuña sobre el tronco (es decir, cuáles son
las magnitudes de las fuerzas que causan que el tronco se parta)?
a
Estrategia
Las fuerzas de fricción ejercidas por el tronco se oponen a la penetración de la
cuña y tienen una magnitud mkN. Se pueden aplicar las ecuaciones de equilibrio para
determinar N en términos de F.
Solución
F
Dibuje el diagrama de cuerpo libre de la cuña.
mkN
a
N
La suma de las fuerzas en la dirección vertical es
a
a
2N sen
2mkN cos
F 0.
2
2
Al resolver para N se obtiene
F
N
2[sen(a/2) mk cos(a/2)]
F
2[sen(10/2) (0.20) cos(10/2)]
N
Aplique el equilibrio.
1.75F.
Problema de práctica Si se retira la fuerza F, ¿la cuña permanecerá en su lugar en
el tronco?
Respuesta: Sí.
mkN
450
Capítulo 9 Fricción
Problemas
䉴 9.65 En el ejemplo activo 9.4, los coeficientes de fricción
entre la cuña y el tronco son ms 0.22 y mk 0.20. ¿Cuál es el
máximo valor del ángulo a para el cual la cuña permanecería en
el tronco al retirar la fuerza F?
9.69 Las masas de los bloques mostrados son mA 30 kg y
mB 70 kg. Entre todas las superficies en contacto, ms 0.1.
¿Cuál es la fuerza F máxima que puede aplicarse sin ocasionar
que los bloques se deslicen?
䉴 9.66 La cuña mostrada se usa para partir un tronco. La cuña
pesa 20 lb y el ángulo a es igual a 30°. El coeficiente de fricción
cinética entre las caras de la cuña y el tronco es 0.28. Si la fuerza
normal ejercida por cada cara de la cuña debe ser igual a 150 lb
para partir el tronco, ¿Cuál es la fuerza F necesaria para introducir
la cuña en el tronco a una velocidad constante? (Vea el ejemplo
activo 9.4).
30 F
A
䉴 9.67 El coeficiente de fricción estática entre las caras de
la cuña y el tronco del problema 9.66 es 0.30. ¿Permanecerá la
cuña en su lugar cuando la fuerza F sea retirada? (Vea el ejemplo
activo 9.4).
20
B
F
a
F
Problema 9.69
Problemas 9.66/9.67
9.68 Los pesos de los bloques mostrados son WA 100 lb y
WB 25 lb. Entre todas las superficies en contacto, ms 0.32
y mk 0.30. ¿Qué fuerza F se requiere para mover B hacia la
izquierda a una velocidad constante?
9.70 Cada uno de los bloques mostrados pesa 200 lb. Entre todas
las superficies en contacto, ms 0.1. ¿Cuál es la fuerza F máxima
que puede aplicarse sin ocasionar que el bloque B se deslice hacia
arriba?
B
A
A
C
F
10
B
Problema 9.68
80
80
Problema 9.70
F
Problemas
9.71 Las pequeñas cuñas llamadas calzas pueden usarse para
mantener un objeto en su lugar, como muestra la figura. El coeficiente de fricción cinética entre las superficies en contacto es 0.4.
¿Cuál es la fuerza F necesaria para empujar la calza hacia abajo
hasta que la fuerza horizontal ejercida sobre el objeto A sea de
200 N?
9.72 El coeficiente de fricción cinética entre las superficies
en contacto de la figura es 0.44. Si las calzas están en reposo y
ejercen una fuerza horizontal de 200 N sobre el objeto A, ¿cuál es
la fuerza ascendente que debe ejercerse sobre la calza izquierda
para aflojarla?
9.75 La caja A de la figura tiene una masa de 80 kg y la cuña B
tiene una masa de 40 kg. Entre todas las superficies en contacto,
ms 0.15 y mk 0.12. ¿Qué fuerza F se requiere para elevar A
con velocidad constante?
9.76 Suponga que la caja A de la figura pesa 800 lb y B pesa
400 lb. Los coeficientes de fricción entre todas las superficies
en contacto son ms 0.15 y mk 0.12. ¿Permanecerá B en
posición si se retira la fuerza F?
F
A
Calzas
5
10
B
10
A
5
Problemas 9.75/9.76
Problemas 9.71/9.72
9.73 La caja A mostrada pesa 600 lb. Entre todas las superficies
en contacto, ms 0.32 y mk 0.30. Ignore los pesos de las cuñas.
¿Qué fuerza F se requiere para mover A hacia la derecha con velocidad constante?
9.74 Suponga que entre todas las superficies en contacto que se
muestran en la figura, ms 0.32 y mk 0.30. Ignore los pesos de
las cuñas de 5°. Si se requiere una fuerza F 800 N para mover A
hacia la derecha con velocidad constante, ¿cual es la masa de A?
F
5
A
5
Problemas 9.73/9.74
451
F
452
Capítulo 9 Fricción
9.77 Entre los objetos A y B de la figura, ms 0.20, y entre B y C,
ms 0.18. Entre C y la pared, ms 0.30. Los pesos WB 20 lb y
WC 80 lb. ¿Qué fuerza F se requiere para que C empiece a
moverse hacia arriba?
9.78 En la figura, las masas de A, B y C son de 8 kg, 12 kg y
80 kg respectivamente. Entre todas las superficies en contacto,
ms 0.4. ¿Qué fuerza F se requiere para que C empiece a moverse
hacia arriba?
F
C
C
A
10
B
F
B
12
15
A
Problema 9.78
Problema 9.77
9.3 Roscas
ANTECEDENTES
Las roscas resultan familiares debido a que se usan en tornillos para madera, en tornillos de máquinas y en otros elementos de máquinas. En la figura 9.10a se muestra
un eje con roscas cuadradas. La distancia axial p de una rosca a la siguiente se llama
paso de la rosca, y el ángulo a es su pendiente. Se considerará sólo el caso en que el
eje tiene una sola rosca continua, donde la relación entre el paso y la pendiente es
tan a =
p ,
2pr
(9.7)
donde r es el radio medio de la rosca.
F
a
M
p
(b)
Figura 9.10
(a) Eje con rosca cuadrada.
(b) El eje dentro de un manguito con
ranura correspondiente. La dirección
de M puede ocasionar que el eje
comience a moverse en la dirección
axial opuesta a F.
(c) Elemento diferencial de la rosca
cuando el deslizamiento es inminente.
dL
dR
r
(a)
a
a
us
(c)
9.3 Roscas
453
Suponga que el eje roscado está dentro de un manguito fijo con una ranura
correspondiente y se somete a una fuerza axial F (figura 9.10b). La aplicación de
un par M en la dirección mostrada ocasionará que el eje empiece a girar y se mueva
en la dirección axial opuesta a F. El objetivo aquí consiste en determinar el par M
necesario para que el eje empiece a girar.
En la figura 9.10c se dibujó el diagrama de cuerpo libre de un elemento diferencial de la rosca de longitud dL, representando con la fuerza dR la reacción ejercida por la ranura correspondiente. Si el eje está a punto de girar, dR resiste el
movimiento inminente y el ángulo de fricción es el ángulo de fricción estática us.
La componente vertical de la reacción sobre el elemento es dR cos (us a). Para
determinar la fuerza vertical total sobre la rosca, se debe integrar esta expresión
sobre la longitud L de la rosca. Por equilibrio, el resultado debe ser igual a la fuerza
axial F que actúa sobre el eje.
cos1us + a2
LL
dR = F.
(9.8)
El momento respecto al centro del eje debido a la reacción sobre el elemento es
r dR sen(us a). El momento total debe ser igual al par M ejercido sobre el eje:
r sen1us + a2
LL
dR = M.
Dividiendo esta ecuación entre la ecuación (9.8), se obtiene el par M necesario
para que el eje esté a punto de girar y moverse en la dirección axial opuesta a F:
M rF tan(us a).
(9.9)
Sustituyendo el ángulo de fricción estática us en esta expresión por el ángulo de
fricción cinética uk, se obtiene el par requerido para que el eje gire con velocidad
constante.
Si el par M se aplica al eje en la dirección opuesta (figura 9.11a), el eje tiende a girar y moverse en la dirección axial de la carga F. En la figura 9.11b se muestra la reacción sobre un elemento diferencial de la rosca de longitud dL cuando el
deslizamiento es inminente. La dirección de la reacción se opone al giro del eje.
Aquí, la componente vertical de la reacción sobre el elemento es dR cos(us a).
Por equilibrio se requiere que
cos1us - a2
LL
dR = F.
F
M
(9.10)
(a)
El momento respecto al centro del eje debido a la reacción es r dR sen(us a),
por lo que
r sen1us - a2
LL
dR = M.
dL
Dividiendo esta ecuación entre la ecuación (9.10) se obtiene el par M necesario
para que el eje esté a punto de girar y moverse en la dirección de la fuerza F:
M rF tan(us a).
(9.11)
Sustituyendo us por uk en esta expresión, se obtiene el par necesario para que el eje
gire con velocidad constante.
Observe en la ecuación (9.11) que el par requerido para un movimiento inminente es igual a cero cuando us a. Cuando el ángulo de fricción es menor que
este valor, el eje girará y se moverá en la dirección de la fuerza F sin la aplicación
de ningún par.
a
(b)
dR
a
us
Figura 9.11
(a) Dirección de M que puede causar que el
eje se mueva en la dirección axial de F.
(b) Elemento diferencial de la rosca cuando el
deslizamiento es inminente.
454
Capítulo 9 Fricción
RESULTADOS
F
M
La pendiente a de la rosca se relaciona con su paso p y
el radio r por
p
.
tan a (9.7)
2pr
a
p
r
M rF tan(us a).
(9.9)
Par M requerido para que la rotación y
el movimiento axial del eje opuesto a
la dirección F sean inminentes, donde
us arctan ms.
M rF tan(us a).
Ejemplo activo 9.5
20 pulg
(9.11)
Par M (opuesto a la dirección mostrada)
requerido para que la rotación y el movimiento axial del eje en la dirección de
F sean inminentes. Si us a, el eje girará y se moverá en la dirección de F sin
la aplicación de ningún par.
Rotación de un collarín roscado (䉴 Relacionado con el problema 9.79)
20 pulg
A
B
C
El extremo derecho de la barra AB de la figura está conectado al collarín B sin rosca
que descansa sobre el collarín roscado C. El radio medio del eje vertical roscado
es r 1.6 pulg y su paso es p 0.2 pulg. Los coeficientes de fricción entre las
roscas del collarín C y el eje vertical son ms 0.25 y mk 0.22. El objeto suspendido de 400 lb puede subirse o bajarse haciendo girar el collarín C. Cuando el sistema está en la posición mostrada, con la barra AB horizontal, ¿cuál es la magnitud
del par que debe aplicarse al collarín C para que empiece a girar a una velocidad
constante y el objeto suspendido se mueva hacia arriba?
Estrategia
Dibujando el diagrama de cuerpo libre de la barra AB y el collarín B, es posible
determinar la fuerza axial ejercida sobre el collarín C. Luego se puede usar la
ecuación (9.9), remplazando us con uk, para determinar el par requerido.
9.3 Roscas
Solución
B
Dibuje el diagrama de cuerpo libre de
la barra y el collarín B.
De la suma de momentos respecto al punto A,
Mpunto A (40 pulg)F (20 pulg)(400 lb) 0,
la fuerza F 200 lb. Ésta es la fuerza axial
ejercida sobre el collarín C.
Ax
Ay
400 lb
Aplique el equilibrio.
F
C
De la ecuación (9.7)
p
0.2 pulg
0.0199,
tan a 2pr
2p(1.6 pulg)
la pendiente de la rosca es a 1.14.
El ángulo de fricción cinética es
uk arctan mk arctan(0.22) 12.4.
Aplique la
ecuación (9.9).
Sustituyendo estos valores en la ecuación (9.9),
M rF tan(uk a)
(1.6 pulg)(200 lb) tan(12.4 1.14)
77.1 pulg-lb.
Problema de práctica Cuando el sistema se encuentra en la posición mostrada, con
la barra AB horizontal, ¿cuál es la magnitud del par que debe aplicarse sobre el collarín
C para que éste empiece a girar con una velocidad constante y mueva el objeto suspendido hacia abajo?
Respuesta: 63.8 pulg-lb.
F
455
456
Capítulo 9 Fricción
Problemas
䉴 9.79 En el ejemplo activo 9.5, suponga que el paso de la rosca
se cambia de p 0.2 pulg a p 0.24 pulg. ¿Cuál es la pendiente
de la rosca? ¿Cuál es la magnitud del par que debe aplicarse al
collarín C para ocasionar que éste gire a una velocidad constante
y mueva el objeto suspendido hacia arriba?
9.80 El paso de la rosca es p 2 mm y el radio medio de la
rosca es r 20 mm. Los coeficientes de fricción entre la rosca y
la ranura correspondiente son ms 0.22 y mk 0.20. El peso
W 500 N. Ignore el peso del eje roscado. ¿Qué par debe
aplicarse al eje para bajar el peso a velocidad constante?
9.82 El paso del eje roscado de la abrazadera en C mostrada
es p 0.05 pulg, y el radio medio de la rosca es r 0.15 pulg.
Los coeficientes de fricción entre el eje roscado y el collarín
correspondiente son ms 0.18 y mk 0.16.
a) ¿Cuál es el par máximo que debe aplicarse sobre el eje para
ejercer una fuerza de 30 lb sobre el objeto sujeto?
b) Si se ejerce una fuerza de 30 lb sobre el objeto sujeto, ¿cuál
es el par que debe aplicarse sobre el eje para empezar a aflojar
la abrazadera?
W
Problema 9.82
C
Problema 9.80
9.81 La posición de la viga horizontal se puede ajustar haciendo
girar el tornillo A. Ignore el peso de la viga. El paso del tornillo
es p 1 mm y el radio medio de la rosca es r 4 mm. Los coeficientes de fricción entre la rosca y la ranura correspondiente son
ms 0.20 y mk 0.18. Si el sistema está inicialmente en reposo,
determine el par que se debe aplicar al tornillo para que la viga
empiece a moverse a) hacia arriba o b) hacia abajo.
9.83 La masa del bloque A es de 60 kg. Ignore el peso de la cuña
de 5°. El coeficiente de fricción cinética entre las superficies en
contacto del bloque A, la cuña, la mesa y la pared es mk 0.4.
El paso del eje roscado es de 5 mm, el radio medio de la rosca es
de 15 mm y el coeficiente de fricción cinética entre la rosca y la
ranura correspondiente es de 0.2. ¿Qué par debe ejercerse sobre
el eje roscado para elevar el bloque A con velocidad constante?
A
400 N
5
A
100 mm
300 mm
Problema 9.81
Problema 9.83
Problemas
9.84 La prensa de tornillo mostrada ejerce fuerzas de 80 lb sobre
A. Los ejes roscados están sometidos sólo a cargas axiales por las
mordazas de la prensa. El paso de sus roscas es p 18 pulg, el
radio medio de las roscas es r 1 pulg y el coeficiente de fricción
estática entre las roscas y las ranuras correspondientes es 0.2.
Suponga que se quiere aflojar la prensa haciendo girar uno de los
ejes. Determine el par que se debe aplicar (a) al eje B; (b) al eje C.
9.85 Suponga que se quiere apretar la prensa del problema 9.84
haciendo girar uno de los ejes. Determine el par que se debe aplicar
a) al tornillo B;
b) al tornillo C.
A
4 pulg
B
4 pulg
9.88 El gato de automóvil mostrado en la figura funciona haciendo
girar el eje horizontal roscado en A. El eje embona dentro de un
collarín correspondiente en B. Conforme el eje gira, los puntos A y B
se acercan o se alejan, causando que el gato se mueva hacia arriba o
hacia abajo. El paso del eje roscado es p 0.1 pulg, el radio medio
de la rosca es r 0.2 pulg y el coeficiente de fricción cinética
entre la rosca y el collarín correspondiente en B es 0.15. ¿Qué par
debe aplicarse en A para que el eje gire a velocidad constante y
eleve el gato cuando éste se halla en la posición mostrada y la
carga L 1400 lb?
9.89 El gato de automóvil mostrado en la figura funciona haciendo
girar el eje horizontal roscado en A. El eje embona dentro de un
collarín correspondiente en B. Conforme el eje gira, los puntos A y B
se acercan o se alejan, causando que el gato se mueva hacia arriba o
hacia abajo. El paso del eje roscado es p 0.1 pulg, el radio medio
de la rosca es r 0.2 pulg y el coeficiente de fricción cinética
entre la rosca y el collarín correspondiente en B es 0.15. ¿Qué par
debe aplicarse en A para que el eje gire a velocidad constante y
baje el gato cuando éste se halla en la posición mostrada y la
carga L 1400 lb?
C
Problemas 9.84/9.85
9.86 El eje roscado de la figura tiene un soporte de bola y cuenca
en B. La carga A de 400 lb puede subirse o bajarse haciendo girar
el eje, lo cual ocasiona que el collarín roscado en C se mueva con
respecto al eje. Ignore los pesos de los elementos. El paso del eje
1
es p –4 pulg, el radio medio de la rosca es r 1 pulg y el coeficiente de fricción estática entre la rosca y la ranura correspondiente
es 0.24. Si el sistema está en reposo en la posición mostrada, ¿qué
par se requiere para que el tornillo gire y eleve la carga?
9.87 En el problema 9.86, si el sistema está en reposo en la
posición mostrada, ¿qué par se necesita para que el tornillo
empiece a girar y baje la carga?
9 pulg
L
3 pulg
B
A
C
3 pulg
A
12 pulg
B
5 pulg
Problemas 9.88/9.89
9 pulg
9 pulg
18 pulg
Problemas 9.86/9.87
457
458
Capítulo 9 Fricción
9.90 Un templador como el mostrado en la figura se usa para
ajustar la tensión en una barra o cable y está roscado en ambos
extremos. Al hacer girar el templador los extremos roscados se
acercan o se alejan uno del otro. Suponga que el paso de las
roscas es p 0.05 pulg, su radio medio es r 0.25 pulg y el
coeficiente de fricción estática entre las roscas y las ranuras
correspondientes es 0.24. Si T 200 lb, ¿qué par debe ejercerse
sobre el templador para que éste empiece a apretar?
9.94 Los elementos CD y DG de la armadura mostrada tienen
templadores. (Vea el problema 9.90). El paso de las roscas es
p 4 mm, su radio medio es r 10 mm y el coeficiente de
fricción estática entre las roscas y las ranuras correspondientes
es 0.18. ¿Qué par debe aplicarse al templador del elemento CD
para que empiece a aflojar?
9.95 En el problema 9.94, ¿qué par debe aplicarse sobre el
templador del elemento DG para que empiece a aflojar?
9.91 Suponga que el paso de las roscas del templador mostrado
es p 0.05 pulg, su radio medio es r 0.25 pulg y el coeficiente
de fricción estática entre las roscas y las ranuras correspondientes
es 0.24. Si T 200 lb, ¿qué par debe ejercerse sobre el templador
para que éste empiece a aflojar?
C
2m
H
A
T
G
E
B
D
F
2 kN
4 kN
T
2m
Problemas 9.90/9.91
2m
2m
2m
Problemas 9.94/9.95
9.92 El elemento BE del bastidor mostrado tiene un templador.
(Vea el Problema 9.90). Las roscas tienen un paso p 1 mm, el
radio medio de las roscas es r 6 mm y el coeficiente de fricción
estática entre las roscas y las ranuras correspondientes es 0.2.
¿Qué par debe aplicarse al templador para que empiece a aflojar?
9.93 En el problema 9.92, ¿qué par debe ejercerse sobre el
templador para que empiece a apretar?
0.4 m
A
9.96* La carga W 800 N puede subirse o bajarse haciendo
girar el eje roscado que se muestra en la figura. Las distancias son
b 75 mm y h 200 mm. Las barras de pasador tienen cada una
300 mm de longitud. El paso del eje roscado es p 5 mm, el
radio medio de la rosca es r 15 mm y el coeficiente de fricción
cinética entre la rosca y la ranura correspondiente es 0.2. Cuando
el sistema está en la posición mostrada, ¿qué par debe aplicarse
para que el tornillo gire a velocidad constante y la carga se eleve?
600 N
1.0 m
b
B
C
0.5 m
D
W
E
F
0.8 m
0.4 m
Problemas 9.92/9.93
h
Problema 9.96
9.4 Cojinetes
M
M
r
F
F
M
r
F
a
(b)
(c)
(d)
F us
F
R us
a
(a)
459
(e)
r senus
(f)
Figura 9.12
(a) Flecha soportada por chumaceras.
(b) Polea soportada por la flecha.
(c) La flecha y la chumacera cuando no se aplica ningún par sobre la flecha.
(d) Un par ocasiona que la flecha ruede dentro de la chumacera.
(e) Diagrama de cuerpo libre de la flecha.
(f) Las dos fuerzas sobre la flecha deben ser iguales y opuestas.
9.4 Cojinetes
ANTECEDENTES
Un cojinete es un soporte. Este término se refiere generalmente a soportes diseñados para permitir que el objeto soportado se mueva. Por ejemplo, en la figura
9.12a una flecha horizontal está soportada por dos cojinetes especiales llamados
chumaceras que permiten que la flecha gire. La flecha puede entonces soportar
una carga perpendicular a su eje, como en el caso de una carga sujeta por una
polea (figura 9.12b).
Aquí se analizarán chumaceras que consisten en ménsulas con agujeros a
través de los cuales pasa la flecha. El radio de la flecha es ligeramente menor que
el de los agujeros de las chumaceras. El objetivo es determinar el par que se debe
aplicar a la flecha para que gire en las chumaceras. Sea F la carga total soportada
por la flecha, incluido el peso de ésta. Cuando no se aplica ningún par sobre la
flecha, la fuerza F presiona las chumaceras como muestra la figura 9.12c. Cuando
se ejerce un par M sobre la flecha, ésta rueda sobre las superficies de las chumaceras (figura 9.12d). El término a es el ángulo entre el punto original de contacto
de la flecha y su punto de contacto cuando se aplica M.
En la figura 9.12e se dibuja el diagrama de cuerpo libre de la flecha cuando
M es lo bastante grande para que el deslizamiento sea inminente. La fuerza R es la
reacción total ejercida por las dos chumaceras. Como R y F son las únicas fuerzas
que actúan sobre la flecha, el equilibrio requiere que a us y R F (figura 9.12f).
La reacción ejercida sobre la flecha por las chumaceras se desplaza una distancia
r sen us, desde la línea vertical que pasa por el centro de la flecha. Al sumar momentos respecto al centro de la flecha, se obtiene el par M que hace que la flecha esté
a punto de deslizarse:
M rF sen us.
(a)
Rueda
(9.12)
Éste es el máximo par que puede ejercerse sobre la flecha sin que ésta empiece a
girar. Al reemplazar us en esta expresión por el ángulo de fricción cinética uk, se
obtiene el par necesario para que la flecha gire con velocidad constante.
El tipo de chumacera que se ha descrito es muy primitiva para la mayoría de
las aplicaciones. Las superficies donde la flecha y la chumacera están en contacto
se desgastarían rápidamente. Por lo general, los diseñadores incorporan “baleros”
o “rodillos” en las chumaceras para minimizar la fricción (figura 9.13).
(b)
Figura 9.13
(a) Chumacera con una hilera de baleros.
(b) Ensamble de la chumacera de la rueda de
un automóvil. Hay dos hileras de baleros
entre la rueda giratoria y el cilindro
interior fijo.
460
Capítulo 9 Fricción
RESULTADOS
Una chumacera tiene un orificio circular un poco
más grande que la flecha circular que soporta.
El par M que debe aplicarse para que el deslizamiento sea inminente respecto a la chumacera es
M rF senus,
M
(9.12)
donde r es el radio del eje, F es la carga lateral soportada por la flecha, y us arctan ms.
Ejemplo activo 9.6
F
Polea soportada por chumaceras (䉴 Relacionado con el problema 9.97)
El peso de la carga mostrada en la figura es W 1000 lb. La polea P tiene un radio
de 6 pulg y está rígidamente unida a un eje horizontal circular soportado por chumaceras. El radio del eje es de 0.5 pulg y el coeficiente de fricción cinética entre el
eje y la chumacera es mk 0.2. Los pesos de la polea y el eje son insignificantes.
¿Qué tensión debe ejercer el cabrestante A sobre el cable para elevar la carga a velocidad constante?
P
45
W
A
Estrategia
La ecuación (9.12) con us reemplazada por uk relaciona el par M requerido para
que la polea gire a velocidad constante con la fuerza lateral F soportada por el eje.
Expresando M y F en términos de las fuerzas ejercidas sobre la polea por el cable
y aplicando la ecuación (9.12), es posible obtener una ecuación para la tensión que
debe ejercer el cabrestante.
9.4 Cojinetes
Solución
6 pulg
Fuerzas ejercidas por el cable sobre la polea. La fuerza
T es la tensión ejercida por el cabrestante.
45
W
T
45
T
W
F
F (W T sen 45)2 (T cos 45)2.
M (6 pulg)(T W).
La suma vectorial de las fuerzas ejercidas por el cable sobre la polea es la fuerza lateral F que debe soportar el eje de
la polea. La magnitud de F puede expresarse en términos de W y T.
La polea se mueve en dirección a la de las
manecillas del reloj. Exprese el par en el
sentido de las manecillas del reloj sobre
la polea en términos de T y W.
El ángulo de fricción cinética es
uk arctan mk arctan(0.2) 11.3.
La ecuación (9.12) es
M rF sen uk:
(6 pulg)(T W) (0.5 pulg) (W T sen 45)2 (T cos 45)2 sen11.3.
Estableciendo W 1000 lb y resolviendo se obtiene
T 1030 lb.
Problema de práctica ¿Cuál es la tensión que debe ejercer el cabrestante A sobre
el cable para bajar la carga a velocidad constante?
Respuesta: T 970 lb.
Aplique la
ecuación (9.12).
461
462
Capítulo 9 Fricción
Problemas
䉴 9.97 En el ejemplo activo 9.6, suponga que la colocación del
cabrestante en A se cambia de manera que el ángulo entre el cable
que va de A a P y la horizontal aumenta de 45° a 60°. Si la carga
suspendida pesa 1500 lb, ¿qué tensión debe ejercer el cabrestante
sobre el cable para elevar la carga a una velocidad constante?
9.98 El radio de la polea mostrada es 4 pulg. La polea está unida
rígidamente a un eje horizontal, el cual está soportado por dos
chumaceras. El radio del eje es 1 pulg, y el peso combinado de la
polea y el eje es de 20 lb. Los coeficientes de fricción entre el eje
y las chumaceras son ms 0.30 y mk 0.28. Determine el peso
máximo W que puede suspenderse como se muestra, sin causar
que el eje en reposo se deslice en las chumaceras.
9.102 La polea de 8 pulg de radio está montada sobre un eje de
1 pulg de radio. El eje está soportado por dos chumaceras. El
coeficiente de fricción estática entre las chumaceras y el eje es
ms 0.15. Ignore los pesos de la polea y del eje. El bloque A
de 50 lb de peso descansa sobre el piso. Si se agrega lentamente
arena a la cubeta B, ¿qué peso tiene la cubeta junto con la arena
cuando el eje se desliza en las chumaceras?
8 pulg
9.99 En el problema 9.98, suponga que el peso W 4 lb. ¿Qué
par debería aplicarse al eje horizontal para elevar el peso a una
velocidad constante?
B
A
W
Problemas 9.98/9.99
Problema 9.102
9.100 La polea que se muestra en la figura está montada sobre
un eje horizontal soportado por chumaceras. El coeficiente de
fricción cinética entre el eje y las chumaceras es mk 0.3. El
radio del eje es de 20 mm y el radio de la polea es de 150 mm.
La masa m 10 kg. Ignore las masas de la polea y del eje. ¿Qué
fuerza T debe aplicarse al cable para mover la masa hacia arriba
a velocidad constante?
9.103 La polea de 50 mm de radio está montada sobre un eje
de 10 mm de radio. El eje está soportado por dos chumaceras. La
masa del bloque A es de 8 kg. Ignore los pesos de la polea y del
eje. Si se necesita una fuerza T 84 N para levantar el bloque A
a velocidad constante, ¿cuál es el coeficiente de fricción cinética
entre el eje y las chumaceras?
9.101 En el problema 9.100, ¿qué fuerza T debe aplicarse al
cable para que la masa descienda a velocidad constante?
50 mm
20
10 mm
A
Problema 9.103
m
T
Problemas 9.100/9.101
T
Problemas
9.104 La masa del objeto suspendido que se muestra en la figura
es de 4 kg. La polea tiene un radio de 100 mm y se encuentra rígidamente unido a un eje horizontal soportado por chumaceras. El radio
del eje horizontal es 10 mm y el coeficiente de fricción cinética entre
el eje y las chumaceras es 0.26. ¿Qué tensión debe ejercer la persona
sobre la cuerda para elevar la carga a una velocidad constante?
463
9.108 Las dos poleas tienen radios de 4 pulg y están montadas
sobre ejes de 1 pulg de radio soportados por chumaceras. Ignore
los pesos de las poleas y los ejes. La tensión en el resorte es de
40 lb. El coeficiente de fricción cinética entre los ejes y las chumaceras es mk 0.3. ¿Qué par M se requiere para hacer girar la
polea izquierda a velocidad constante?
9.105 En el problema 9.104, ¿qué tensión debe ejercer la persona
sobre la cuerda para bajar la carga a una velocidad constante?
M
4 pulg
25
Problema 9.108
100 mm
9.109 Los pesos de las cajas mostradas son wA 65 lb y
WB 130 lb. El coeficiente de fricción estática entre las cajas
A y B y entre la caja B y el piso es 0.12. La polea tiene un radio
de 4 pulg y está montada sobre un eje con radio de 0.8 pulg. El
coeficiente de fricción estática entre la polea y el eje es 0.16.
¿Cuál es la máxima fuerza F con la que las cajas no se deslizarán?
Problemas 9.104/9.105
9.106 La polea mostrada tiene un radio de 200 mm, y está montada sobre un eje con radio de 20 mm. El coeficiente de fricción
estática entre la polea y el eje es ms 0.18. Si FA 200 N, ¿cuál
es la fuerza máxima FB que puede aplicarse sin ocasionar que la
polea gire? Ignore el peso de la polea.
y
F
A
20
B
FB
40
Problema 9.109
FA
x
Problema 9.106
9.107 Las masas de las cajas mostradas son mA 15 kg y
mB 60 kg. El coeficiente de fricción estática entre las cajas A
y B y entre la caja B y la superficie inclinada es 0.12. La polea
tiene un radio de 60 mm y está montado sobre un eje con radio
de 10 mm. El coeficiente de fricción estática entre la polea y el
eje es 0.16. ¿Cuál es la máxima fuerza F con la que las cajas no
se deslizarán?
F
9.110 El coeficiente de fricción estática entre la caja de 100 kg
y la superficie inclinada es 0.35. Cada polea tiene un radio de
100 mm y está montada sobre un eje de 5 mm soportado por
chumaceras. El coeficiente de fricción cinética entre los ejes y
las chumaceras es 0.18. Determine la tensión T necesaria para
jalar la caja hacia arriba sobre la superficie a velocidad constante.
T
A
B
60
20
Problema 9.110
Problema 9.107
464
Capítulo 9 Fricción
9.5 Cojinetes de empuje axial y embragues
ANTECEDENTES
Un cojinete de empuje axial soporta un eje giratorio sometido a una carga axial. En
el tipo mostrado en las figuras 9.14a y b, el extremo cónico de la flecha es presionado contra la cavidad cónica correspondiente por una carga axial F. A continuación se determinará el par M necesario para hacer girar la flecha.
El elemento diferencial de área dA de la figura 9.14c es
dA = 2pr ds = 2pra
dr
b.
cos a
Integrando esta expresión de r ri a r r0 se obtiene el área de contacto:
A =
p1r o2 - r i22
cos a
.
Si se supone que la superficie correspondiente ejerce una presión p uniforme, la
componente axial de la fuerza total debida a p debe ser igual a F: pA cos a F.
Por lo tanto, la presión es
p =
F
F
=
.
2
A cos a
p1r o - r 2i 2
Conforme el eje gira alrededor de su eje, el momento respecto al eje debido a la
fuerza de fricción sobre el elemento dA es rmk(p dA). El momento total es
ro
M =
LA
mkrp dA =
Lri
mkrc
F
2pr dr
da
b.
cos a
p1r o2 - r 2i 2
Integrando, se obtiene el par M necesario para hacer girar la flecha a velocidad
constante:
M =
2mkF r o3 - r 3i
a
b.
3 cos a r o2 - r 2i
M
ro
a
ri
(9.13)
F
(b)
(a)
ds
dr
a
ro
r
ri
F
dA
Figura 9.14
(a), (b) Un cojinete de empuje axial soporta a
un eje sometido a una carga axial.
(c) El elemento diferencial dA y la presión
uniforme p ejercida por la cavidad.
M
p
(c)
9.5 Cojinetes de empuje axial y embragues
465
F
F
r
M
M
(a)
(b)
Figura 9.15
Cojinete de empuje axial que soporta un eje de extremos planos.
En las figuras 9.15a y b se muestra un cojinete de empuje más sencillo. La
ménsula soporta el extremo plano de un eje de radio r que está sometido a una
carga axial F. El par necesario para hacer girar la flecha a velocidad constante se
puede obtener con la ecuación (9.13) haciendo a 0, ri 0 y ro r:
M =
2
m Fr.
3 k
F
(9.14)
Rodillos
Aunque estos cojinetes de empuje son buenos ejemplos del análisis de las
fuerzas de fricción, se desgastarían muy rápidamente usándolos en la mayoría de
las aplicaciones. El diseñador del cojinete de empuje axial de la figura 9.16 minimiza la fricción incorporando “rodillos” al diseño.
Un embrague es un dispositivo usado para conectar y desconectar dos ejes
coaxiales en rotación. El tipo mostrado en las figuras 9.17a y b consiste en discos
de radio r unidos a los extremos de flechas. Cuando los discos se separan (figura
9.17a), el embrague está desacoplado y las flechas pueden girar libremente una
respecto a la otra. Cuando el embrague está acoplado, oprimiéndose los discos uno
contra el otro con fuerzas F (figura 9.17b), los ejes pueden soportar un par M debido a las fuerzas de fricción entre los discos. Si el par M es muy grande, el embrague se desliza.
Las fuerzas de fricción ejercidas sobre una cara del embrague por la otra cara
son idénticas a las fuerzas de fricción ejercidas por el la ménsula de la figura 9.15
sobre el extremo plano de un eje. Por lo tanto, es posible determinar el máximo par
que el embrague puede soportar sin deslizamiento, al reemplazar mk por ms en la
ecuación (9.14):
M =
2
m Fr.
3 s
(9.15)
r
F
M
M
F
(a)
Figura 9.16
Cojinete de empuje axial con dos hileras de
rodillos cilíndricos entre el eje y el soporte
fijo.
(b)
Figura 9.17
Embrague.
(a) Posición desacoplada.
(b) Posición acoplada.
466
Capítulo 9 Fricción
RESULTADOS
a
ro
M
ri
M
2mkF ro3 r3i
3 cos a ro2 r 2i .
(9.13)
F
Par requerido para hacer girar un eje soportado por
un cojinete de empuje axial, en términos de la fuerza
axial aplicada al eje.
F
F
r
M
M
2 m Fr.
k
3
(9.14)
M
Par requerido para hacer girar un eje de extremos
planos soportado por un cojinete de empuje axial,
en términos de la fuerza axial aplicada al eje.
r
F
M
M
F
2
M msFr.
3
(9.15)
Par requerido para que el deslizamiento de un embrague sea inminente, en términos de la fuerza axial aplicada al embrague.
9.5 Cojinetes de empuje axial y embragues
Cojinete de empuje axial (䉴 Relacionado con el problema 9.111)
Ejemplo activo 9.7
La fuerza axial sobre el cojinete de empuje mostrado es F 200 lb. Los diámetros Do 3 –12 pulg y Di 1 pulg, y el ángulo a 72°. El coeficiente de fricción
cinética es mk 0.18. ¿Qué par se requiere para hacer girar el eje a una velocidad
constante?
Di
Do
a
F
Estrategia
El par está dado por la ecuación (9.13).
Solución
Los radios ro 1.75 pulg y ri 0.5 pulg.
M
2mkF r3o r3i
3 cos a r2o r2i
Aplique la
ecuación (9.13).
2(0.18)(200 lb) (1.75 pulg) (0.5 pulg)
3 cos 72
(1.75 pulg)2 (0.5 pulg)2
3
3
145 pulg-lb.
Problema de práctica La fuerza axial sobre el cojinete de empuje mostrado es
1
F 200 lb. Los diámetros Do 3 –2 pulg y Di 1 pulg, y la dimensión b 5 pulg.
El coeficiente de fricción cinética es mk 0.18. ¿Qué par se requiere para hacer
girar el eje a una velocidad constante?
Di
Do
a
b
Respuesta: M 184 pulg-lb.
F
467
468
Capítulo 9 Fricción
Ejemplo 9.8
Fricción en una lijadora de disco (䉴 Relacionado con el problema 9.118)
La lijadora manual de la figura tiene un disco giratorio D de 4 pulg de radio, con
papel de lija unido a ella. La fuerza total hacia abajo ejercida por el operador y el
peso de la lijadora suman 15 lb. El coeficiente de fricción cinética entre la lija y la
superficie es mk 0.6. ¿Qué par (de torsión) M debe ejercer el motor para hacer girar
la lijadora a velocidad constante?
D
Estrategia
Cuando el disco D gira, se somete a fuerzas de fricción análogas a las fuerzas de
fricción ejercidas por un cojinete de empuje sobre un eje de extremos planos. El
par requerido para hacer girar el disco D a velocidad constante puede determinarse
mediante la ecuación (9.14).
Solución
El par requerido para hacer girar el disco a velocidad constante es
M =
2
2
mkrF = 10.6214 pulg2115 lb2 = 24 pulg-lb.
3
3
Razonamiento crítico
Las ecuaciones (9.13) a (9.15) se obtuvieron bajo el supuesto de que la fuerza
normal (y en consecuencia la fuerza de fricción) está distribuida de manera uniforme sobre las superficies en contacto. La evaluación y la mejora sobre este supuesto requerirían análisis de las deformaciones de las superficies en contacto en
aplicaciones específicas como la lijadora de disco de este ejemplo.
Problemas
䉴 9.111 En el ejemplo activo 9.7, suponga que los diámetros
1
1
Do 3 –2 pulg y Di 1 –2 pulg y el ángulo a 72°. ¿Qué par
se requiere para hacer girar al eje a una velocidad constante?
9.112 El eje circular de extremos planos que se muestra en la figura se presiona dentro del cojinete de empuje mediante una carga
axial de 600 lb. El peso del eje es insignificante. Los coeficientes
de fricción entre el extremo del eje y el cojinete son ms 0.20 y
mk 0.15. ¿Cuál es el máximo par M que se puede aplicar al eje
en reposo sin ocasionar que el cojinete gire?
9.113 El eje circular de extremos planos que se muestra en la figura se presiona dentro del cojinete de empuje mediante una carga
axial de 600 lb. El peso del eje es insignificante. Los coeficientes
de fricción entre el extremo del eje y el cojinete son ms 0.20 y
mk 0.15. ¿Qué par M se requiere para hacer girar el eje a velocidad constante?
600 lb
2 pulg
M
Problemas 9.112/9.113
Problemas
9.114 El disco D mostrado está rígidamente unido al eje vertical.
El eje tiene extremos planos soportados por cojinetes de empuje. El
disco y el eje pesan juntos 220 kg y el eje tiene 50 mm de diámetro.
La fuerza vertical del cojinete superior en el extremo del eje es
de 440 N. El coeficiente de fricción cinética entre los extremos
del eje y los cojinetes es de 0.25. ¿Qué par M se requiere para hacer
girar el eje a velocidad constante?
9.117 Un motor hace girar un tornillo revolvedor que mezcla
productos químicos. El eje del motor está acoplado al tornillo por
medio de un embrague de fricción del tipo mostrado de la figura
9.17. El radio de los discos del embrague es de 120 mm y el coeficiente de fricción estática entre ellos es de 0.6. Si el motor transmite un par máximo de 15 N-m al tornillo, ¿qué fuerza normal
mínima entre las placas del embrague se necesita para impedir el
deslizamiento?
9.115 Suponga que los extremos del eje del problema 9.114 están
soportados por cojinetes de empuje como los de la figura 9.14,
donde ro 25 mm, ri 6 mm, a 45° y mk 0.25. ¿Qué par M
se requiere para hacer girar el eje a velocidad constante?
Embrague
Tornillo
Problema 9.117
M
M
D
D
䉴 9.118 El cojinete de empuje axial de la figura está soportado
por el contacto del collarín C con una placa fija. El área de contacto es un anillo con diámetro interior D1 40 mm y diámetro
exterior D2 120 mm. El coeficiente de fricción cinética entre
el collarín y la placa es mk 0.3. La fuerza F 400 N. ¿Qué
par M se requiere para hacer girar el eje a velocidad constante?
(Vea el ejemplo 9.8).
Problemas 9.114/9.115
F
F
9.116 El eje de la figura está soportado por cojinetes de empuje
axial que lo someten a una carga axial de 800 N. Los coeficientes
de fricción cinética entre el eje y los cojinetes izquierdo y derecho
son 0.20 y 0.26, respectivamente. ¿Qué par se requiere para hacer
girar el eje a velocidad constante?
M
M
C
C
D1
D2
Problema 9.118
15 mm
38 mm
38
mm
Problema 9.116
469
470
Capítulo 9 Fricción
9.119 Un diseño experimental de freno de automóvil funciona
oprimiendo la placa anular fija (en azul) que se muestra en la
figura contra la rueda giratoria. Si mk 0.6, ¿qué fuerza F debe
presionar la placa contra la rueda para ejercer sobre ésta un par
de 200 N-m?
9.120 Un diseño experimental de freno de automóvil funciona
oprimiendo la placa anular fija (en azul) que se muestra en la
figura contra la rueda giratoria. Suponga que mk 0.65 y que
la fuerza que oprime la placa contra la rueda es F 2 kN.
a) ¿Qué par se ejerce sobre la rueda?
b) ¿Qué porcentaje de incremento se obtiene en el par ejercido
sobre la rueda si el radio exterior del freno se incrementa de
90 mm a 100 mm?
9.121 El coeficiente de fricción estática entre los discos del
embrague de un automóvil es 0.8. Si los discos se oprimen con
una fuerza F 2.60 kN, ¿cuál es el par de torsión máximo que
el embrague puede soportar sin deslizarse?
75 mm
150 mm
F
Problema 9.121
F
50 mm
90 mm
9.122* El “cono Morse” mostrado se usa para sostener la
pieza de trabajo sobre el cabezal del torno. El cono se empuja
dentro del husillo y se mantiene en su posición debido a la fricción.
Si el husillo ejerce una presión uniforme p 15 psi sobre el cono
y ms 0.2, ¿qué par se debe ejercer respecto al eje del cono para
aflojarlo?
Husillo
Problemas 9.119/9.120
1.25 pulg
2 pulg
9 pulg
Problema 9.122
Cono
9.6 Fricción en bandas
471
9.6 Fricción en bandas
ANTECEDENTES
Si una cuerda se enrolla alrededor de un poste fijo como muestra la figura 9.18,
una gran fuerza T2 ejercida en un extremo de la cuerda puede ser soportada por una
fuerza T1 relativamente pequeña en el otro extremo. En esta sección se analiza este
fenómeno común, conocido como fricción en bandas porque se puede usar un procedimiento similar para analizar las bandas utilizadas en maquinarias, como las que
impulsan los alternadores y otros dispositivos de un automóvil.
Considere una cuerda enrollada alrededor de un cilindro fijo en un ángulo b
(figura 9.19a). Se supondrá que la tensión T1 se conoce. El objetivo aquí es determinar la máxima fuerza T2 que se puede aplicar al otro extremo de la cuerda sin
que ésta se deslice.
Se inicia dibujando el diagrama de cuerpo libre de un elemento de la cuerda
cuyos límites son los ángulos a y a ¢a, desde el punto en que la cuerda entra en
contacto con el cilindro (figuras 9.19b y c). La fuerza T es la tensión en la cuerda
en la posición definida por el ángulo a. Se sabe que la tensión en la cuerda varía
con la posición, porque crece de T1 en a 0 a T2 en a b. Por lo tanto, se escribe
la tensión en la cuerda en la posición a ¢a como T ¢T. La fuerza ¢N es la
fuerza normal ejercida por el cilindro sobre el elemento. Como se desea determinar
el valor máximo de T2 que no ocasionará que la cuerda se deslice, se supone que la
fuerza de fricción es igual a su valor máximo posible ms¢N, donde ms es el coeficiente de fricción estática entre la cuerda y el cilindro.
Las ecuaciones de equilibrio en las direcciones tangencial y normal a la línea
central de la cuerda son
©Ftangencial = ms ¢N + T cosa
T1
T2
Figura 9.18
Cuerda enrollada alrededor de un poste.
¢a
¢a
b - 1T + ¢T2 cosa
b = 0,
2
2
(9.16)
©Fnormal
¢a
¢a
= ¢N - 1T + ¢T2 sena
b - T sena
b = 0.
2
2
Al eliminar ¢N, es posible escribir la ecuación resultante como
ccosa
sen1¢a>22
¢a
¢a
¢T
b - ms sena
bd
- msT
= 0.
2
2
¢a
¢a>2
a
a
b
T T
T
ms N
N
T2
T1
(a)
Figura 9.19
(a) Cuerda enrollada alrededor de un cilindro fijo.
(b) Elemento diferencial con límites en los ángulos a y a ¢a.
(c) Diagrama de cuerpo libre del elemento.
a
T1
T2
(b)
(c)
472
Capítulo 9 Fricción
Al evaluar el límite de esta ecuación cuando ¢a S 0, y observando que
sen1¢a>22
¢a>2
: 1,
se obtiene
dT
- msT = 0.
da
Esta ecuación diferencial rige la variación de la tensión en la cuerda. Separando
variables,
dT
= ms da.
T
Ahora se puede integrar para determinar la tensión T2 en función de la tensión T1
y el ángulo b:
T2
b
dT
=
ms da.
LT1 T
L0
Así, se obtiene la máxima fuerza T2 que puede aplicarse sin que la cuerda se
deslice cuando la fuerza en el otro extremo es T1:
T2 T1e m s b.
(9.17)
El ángulo b en esta ecuación debe expresarse en radianes. Al reemplazar ms por el
coeficiente de fricción cinética mk se obtiene la fuerza T2 requerida para ocasionar
que la cuerda se deslice a velocidad constante.
La ecuación (9.17) explica por qué una gran fuerza puede ser soportada por
una fuerza relativamente pequeña cuando se enrolla una cuerda alrededor de un
soporte fijo. La fuerza requerida para que la cuerda se deslice crece exponencialmente en función del ángulo a través del cual la cuerda está enrollada. Suponga
que ms 0.3. Cuando la cuerda está enrollada una vuelta completa alrededor del
poste (b 2p), la razón T2 >T1 6.59. Cuando la cuerda está enrollada cuatro
vueltas completas alrededor del poste (b 8p), la razón T2>T1 1880.
RESULTADOS
b
T2
T2 T1emsb.
(9.17)
T1
Fuerza T2 necesaria para que el deslizamiento de la cuerda respecto al soporte fijo en la dirección de T2 sea inminente, donde el ángulo b está en radianes y ms es el coeficiente de fricción estática entre la cuerda y el soporte.
9.6 Fricción en bandas
Ejemplo activo 9.9
Cuerda enrollada alrededor de cilindros fijos (䉴 Relacionado con el problema 9.123)
La caja de 100 lb que se muestra en la figura está suspendida de una cuerda que
pasa sobre dos cilindros fijos. El coeficiente de fricción estática es de 0.2 entre la
cuerda y el cilindro izquierdo y de 0.4 entre la cuerda y el cilindro derecho. ¿Cuál
es la fuerza mínima que la mujer puede ejercer sobre la cuerda para soportar la
caja en equilibrio?
Estrategia
La mujer ejerce la mínima fuerza necesaria cuando el deslizamiento de la cuerda
sobre ambos cilindros es inminente. Si se supone que el deslizamiento es inminente y se aplica la ecuación (9.17) a cada cilindro, se puede determinar la fuerza
que ella debe aplicar.
Solución
Sea T la tensión en la cuerda entre los dos
cilindros. El peso W 100 lb y F es la
fuerza que ejerce la mujer. La cuerda está
enrollada alrededor de cada cilindro en un
ángulo b p/2 (en radianes).
W Temsb Te(0.2)(p/2).
Despejando T se obtiene
T We(0.2)(p/2) (100 lb)e(0.2)(p/2) 73.0 lb.
T Femsb Fe(0.4)(p/2).
Despejando F se obtiene
F Te(0.4)(p/2) (73.0 lb)e(0.4)(p/2) 39.0 lb.
b
T
p
2
T
b
W
p
2
F
Aplique la ecuación (9.17) al cilindro izquierdo. Suponga que el deslizamiento de la cuerda
en la dirección de la fuerza W es inminente.
Aplique la ecuación (9.17) al cilindro derecho.
Suponga que el deslizamiento de la cuerda en
la dirección de la fuerza T es inminente.
Problema de práctica ¿Qué fuerza tendría que ejercer la mujer sobre la cuerda
para que el deslizamiento fuera inminente en la dirección en la que está jalando? Esto
es, ¿qué tan fuerte tendría que jalar para que la caja estuviera a punto de moverse hacia
arriba? ¿Necesitaría ayuda?
Respuesta: 257 lb. Sí.
473
474
Capítulo 9 Fricción
Ejemplo 9.10
Bandas y poleas (䉴 Relacionado con el problema 9.134)
Las poleas mostradas giran a velocidad constante. La grande está unida a un
soporte fijo, y la otra está soportada por una ranura horizontal lisa y es jalada
hacia la derecha por la fuerza F 200 N. El coeficiente de fricción estática entre
las poleas y la banda es ms 0.8, la dimensión b 500 mm y los radios de las
poleas RA 200 mm y RB 100 mm. ¿Cuáles son los valores máximos de los
pares MA y MB para los cuales la banda no se deslizará?
MA
MB
F
RB
RA
b
a T2 T
2
MAA
M
(a) Diagrama de
cuerpo libre de
la polea
grande
a
MB
Ax
Ax
RA
F
B
Ay
Ay
a
a T1
(b) Diagrama de cuerpo
libre de la polea
chica.
RB
T1
Estrategia
Al dibujar los diagramas de cuerpo libre de las poleas, se pueden usar las ecuaciones de equilibrio para relacionar las tensiones en la banda con MA, y MB y obtener
una relación entre las tensiones en la banda y la fuerza F. Cuando el deslizamiento
es inminente, las tensiones también están relacionadas por la ecuación (9.17). A
partir de estas ecuaciones es posible determinar MA y MB.
Solución
Del diagrama de cuerpo libre de la polea grande (figura a) se obtiene la ecuación de
equilibrio
MA RA(T2 T1)
(1)
y del diagrama de cuerpo libre de la polea pequeña (figura b), se obtiene
F (T1 T2) cos a,
MB RB(T2 T1).
(2)
(3)
Problemas
a
a
RA RB
a
b
(c) Determinación del ángulo a.
La banda está en contacto con la polea pequeña sobre el ángulo p 2a (figura c).
Con la línea discontinua puede observarse que el ángulo a satisface la relación
sin a =
sen
RA - RB
200 mm - 100 mm
=
= 0.2.
b
500 mm
Por lo tanto, a 11.5° 0.201 radianes. Si se supone que el deslizamiento es
inminente entre la polea pequeña y la banda, la ecuación (9.17) establece que
T2 T1e m s b T1e0.8(p2a) 8.95T1.
Se resuelve esta ecuación junto con la ecuación (2) para las dos tensiones y se
obtiene T1 20.5 N y T2 183.6 N. Luego, de las ecuaciones (1) y (3), los pares
son MA 32.6 N-m y MB 16.3 N-m.
Si se supone que el deslizamiento es inminente entre la polea grande y la banda,
se obtiene MA 36.3 N-m y MB 18.1 N-m, por lo que la banda se desliza sobre
la polea pequeña para valores menores de los pares.
Problemas
䉴 9.123 En el ejemplo activo 9.9, suponga que el cilindro fijo de
la izquierda se remplaza por una polea. Asuma que las tensiones
en la cuerda a cada lado de la polea son aproximadamente iguales.
¿Cuál es la fuerza mínima que la mujer debe ejercer sobre la cuerda
para mantener la caja en equilibrio?
9.124 Suponga que se desea levantar del suelo una caja de 50 lb
pasando una cuerda sobre la rama de un árbol, como muestra la
figura. El coeficiente de fricción estática entre la cuerda y la rama
es 0.2 y la cuerda está enrollada 135° alrededor de la rama. ¿Qué
fuerza se debe ejercer para levantar la caja?
Problema 9.124
475
476
Capítulo 9 Fricción
9.125 Los cabrestantes se usan en los veleros para ayudar a
soportar las cuerdas que mantienen en posición a las velas. El
cabrestante mostrado es un poste que gira en sentido de las manecillas del reloj (visto desde arriba) pero no en sentido contrario.
La vela ejerce una tensión TS 800 N sobre la cuerda, que está
enrollada tres vueltas completas alrededor del cabrestante. El
coeficiente de fricción estática entre la cuerda y el cabrestante
es ms 0.2. Determine la tensión TC que el tripulante debe
ejercer sobre el extremo de la cuerda para impedir que ésta se
deslice sobre el cabrestante.
9.127 La caja A mostrada pesa 20 lb. La cuerda está enrollada
un cuarto de vuelta alrededor del poste fijo. Los coeficientes de
fricción entre el poste fijo y la cuerda son ms 0.15 y mk 0.12.
a) ¿Cuál es la fuerza mínima que el hombre debe ejercer para
soportar la caja en reposo?
b) ¿Qué fuerza debe ejercer el hombre para levantar la caja a
velocidad constante?
9.126 El coeficiente de fricción cinética entre la cuerda y el
cabrestante del problema 9.125 es mk 0.16. Si el tripulante
desea que la cuerda se deslice a una velocidad constante, liberando
la vela, ¿cuál es la tensión inicial TC que debe ejercer sobre la
cuerda para que empiece a deslizarse?
A
TC
Problema 9.127
TS
9.128 El peso del bloque A mostrado es W. El disco está soportado por una chumacera lisa. El coeficiente de fricción cinética entre el disco y la banda es mk. ¿Qué par M es necesario
para hacer girar el disco a velocidad constante?
r
M
Problemas 9.125/9.126
A
Problema 9.128
Problemas
9.129 El par requerido para que la rueda de la bicicleta de ejercicio mostrada gire se ajusta cambiando el peso W. El coeficiente
de fricción cinética entre la rueda y la banda es mk. Suponga que
la rueda gira en el sentido de las manecillas del reloj.
a) Demuestre que el par M requerido para que la rueda gire es
M WR (1 e3.4mk).
b) Si W 40 lb y mk 0.2, ¿qué fuerza indicará la báscula S
cuando la bicicleta esté en uso?
9.131 El coeficiente de fricción estática entre la caja de 50 lb
y la superficie inclinada es de 0.10. El coeficiente de fricción
estática entre la cuerda y el cilindro fijo es 0.05. Determine la
fuerza que debe ejercer la mujer sobre la cuerda para ocasionar
que la caja empiece a moverse hacia arriba sobre la superficie
inclinada.
9.132 En el problema 9.131, ¿cuál es la fuerza mínima que
debe ejercer la mujer sobre la cuerda para mantener la caja en
equilibrio sobre la superficie inclinada?
S
15
45
A
R
20
30
30
W
Problema 9.129
9.130 La caja B mostrada pesa 50 lb. Los coeficientes de
fricción entre el cable y los soportes redondos fijos son ms 0.4
y mk 0.3.
a) ¿Cuál es la fuerza mínima F requerida para soportar la caja?
b) ¿Qué fuerza F se requiere para mover la caja hacia arriba a
velocidad constante?
B
F
Problema 9.130
477
Problemas 9.131/9.132
478
Capítulo 9 Fricción
9.133 Los bloques B y C tienen una masa de 20 kg cada uno. El coeficiente de fricción estática entre las superficies en contacto es 0.2.
El bloque A está suspendido por una cuerda que pasa sobre un cilindro fijo y está unido al bloque B. El coeficiente de fricción estática
entre la cuerda y el cilindro es 0.3. ¿Cuál es la masa máxima que puede tener el bloque A sin ocasionar que el boque B se deslice hacia
la izquierda?
C
20
B
A
Problema 9.133
䉴 9.134 Si la fuerza F del ejemplo 9.10 se incrementa hasta 400 N, ¿cuáles son los valores máximos de los pares MA y MB para
los cuales la banda no se deslizará?
9.135 El resorte de la figura ejerce una fuerza de 320 N sobre la polea izquierda. El coeficiente de fricción estática entre la banda plana
y las poleas es ms 0.5. La polea derecha no puede girar. ¿Cuál es el par máximo M que se puede ejercer sobre la polea izquierda sin que
la banda se deslice?
100 mm
M
40 mm
260 mm
Problema 9.135
Problemas de repaso
479
Problemas de repaso
9.136 El peso de la caja es W 30 lb y la fuerza F es perpendicular a la superficie inclinada. El coeficiente de fricción estática entre la caja y la superficie inclinada es ms 0.2.
a) Si F 30 lb, ¿cuál es la magnitud de la fuerza de fricción
ejercida sobre la caja en reposo?
b) Si F 10 lb, demuestre que la caja no puede permanecer en
equilibrio sobre la superficie inclinada.
9.137 En el problema 9.136, ¿qué valor tiene la fuerza mínima
F necesaria para mantener la caja en reposo sobre la superficie
inclinada?
9.140 Las masas de las cajas A y B mostradas son de 25 kg y
30 kg, respectivamente. El coeficiente de fricción estática entre
las superficies de contacto es ms 0.34. ¿Cuál es el valor máximo
de a para el cual las cajas permanecerán en equilibrio?
A
B
a
F
Problema 9.140
W
20
Problemas 9.136/9.137
9.138 Los bloques A y B de la figura están conectados por una
barra horizontal. El coeficiente de fricción estática entre la superficie inclinada y el bloque A de 400 lb es de 0.3. El coeficiente de
fricción estática entre la superficie y el bloque B de 300 lb es
de 0.5. ¿Cuál es la fuerza F mínima que impedirá que los bloques
se deslicen hacia abajo sobre la superficie?
9.141 La ladera de un terraplén tiene una pendiente de 45°
(figura a). Si el coeficiente de fricción estática de suelo sobre
suelo es ms 0.6, ¿será estable el terraplén o se desplomará? Si se
desploma, ¿cuál es la pendiente mínima para la que es estable?
Estrategia: Dibuje un diagrama de cuerpo libre aislando parte
del terraplén como se muestra de la figura b.
45
9.139 ¿Qué fuerza F es necesaria para que los bloques del
problema 9.138 empiecen a deslizarse hacia arriba por la
superficie inclinada?
(a)
B
A
F
45
Problemas 9.138/9.139
u
(b)
Problema 9.141
480
Capítulo 9 Fricción
9.142 La masa de la camioneta es de 2250 kg y el coeficiente
de fricción estática entre sus ruedas y el camino es de 0.6. Si sus
ruedas frontales están bloqueadas pero las traseras no, ¿cuál es el
máximo valor de a para el cual puede permanecer en equilibrio?
9.143 En el problema 9.142, ¿cuál es el valor máximo de a en
el cual la camioneta puede permanecer en equilibrio si su frente
apunta hacia arriba de la pendiente?
9.145 El objeto homogéneo de 20 lb que se muestra en la figura
está soportado en A y B. La distancia h 4 pulg, la fricción puede
despreciarse en B y el coeficiente de fricción estática en A es 0.4.
Determine la fuerza máxima F que se puede ejercer sin que el
cuerpo se deslice.
9.146 En el problema 9.145, suponga que el coeficiente de fricción
estática en B es 0.36. ¿Cuál es el valor máximo de h para el cual el
cuerpo se deslizará antes de volcarse?
2 pulg
F
1m
6 pulg
h
1.2 m
a
3m
A
B
Problemas 9.142/9.143
4 pulg
Problemas 9.145/9.146
9.144 La ménsula de la figura está diseñada de manera que se
puede colocar a cualquier altura sobre la barra vertical. La ménsula
está soportada por fricción entre los dos cilindros horizontales y
la viga vertical. El peso combinado de la ménsula y la cámara
es W. Si el coeficiente de fricción estática entre la viga y los
cilindros horizontales es ms, ¿cuál es la distancia mínima b
necesaria para que la ménsula permanezca en reposo?
9.147 El alpinista de 180 lb que se muestra en la figura está
soportado en la “chimenea” por las fuerzas normal y de fricción
sobre sus zapatos y su espalda. Los coeficientes de fricción estática entre sus zapatos y la pared, y entre su espalda y la pared
son 0.8 y 0.6, respectivamente. ¿Cuál es la fuerza normal mínima
que sus zapatos deben ejercer?
W
h
b
t
Problema 9.144
4
3
Problema 9.147
Problemas de repaso
9.148 Los lados de la compuerta de 200 lb que se muestra en
la figura entran de manera holgada en las ranuras de las paredes.
Los cables en A y B elevan la compuerta a velocidad constante. El
coeficiente de fricción cinética entre la compuerta y las ranuras
es mk 0.3. ¿Qué fuerza debe ejercerse en A para mantener la
elevación a velocidad constante si el cable en B se rompe?
3 pies
481
9.151 La masa del vehículo mostrado es de 900 kg, tiene tracción
en sus ruedas traseras y el coeficiente de fricción estática entre sus
neumáticos y la superficie es de 0.65. El coeficiente de fricción
estática entre la caja y la superficie es 0.4. Si el vehículo intenta
jalar la caja a lo largo de la superficie inclinada, ¿cuál es la máxima
masa que la caja puede tener para deslizarse hacia arriba sobre la
superficie inclinada antes de que las llantas del vehículo resbalen?
3 pies
A
B
3 pies
0.8 m
20
3 pies
1.2 m
20
5 pies
5 pies
1.5 m
2.5 m
Problema 9.151
Problema 9.148
9.149 Los coeficientes de fricción estática entre los neumáticos
del tractor de 1000 kg y el suelo y entre la caja de 450 kg y el
suelo son 0.8, 0.3, respectivamente. Partiendo del reposo, ¿qué
par debe ejercer el motor del tractor sobre las ruedas traseras para
mover la caja? (Las ruedas delanteras pueden girar libremente).
9.150 En el problema 9.149, ¿cuál es la caja de mayor masa
que el tractor puede mover partiendo del reposo si su motor
puede ejercer un par de torsión suficientemente grande? ¿Qué
par de torsión es necesario?
9.152 Cada una de las barras de 1 m mostradas tiene una masa
de 4 kg. El coeficiente de fricción estática entre la barra y la superficie en B es 0.2. Si el sistema está en equilibrio, ¿cuál es la
magnitud de la fuerza de fricción ejercida sobre la barra en B?
9.153 Cada una de las barras de 1 m mostradas tiene una masa
de 4 kg. ¿Cuál es el coeficiente de fricción estática mínimo, entre
la barra y la superficie en B, necesario para que el sistema esté en
equilibrio?
A
0.8 m
O
45
B
0.4 m
Problemas 9.152/9.153
1.4 m
Problemas 9.149/9.150
0.8 m
30
482
Capítulo 9 Fricción
9.154 Los collarines A y B mostrados tienen una masa de 2 kg
cada uno. Si la fricción entre el collarín B y la barra se puede ignorar, ¿cuál es el coeficiente mínimo de fricción estática entre el
collarín A y la barra, necesario para que los collarines permanezcan
en equilibrio en la posición mostrada?
9.155 Si el coeficiente de fricción estática tiene el mismo valor
ms entre los collarines de 2 kg A y B y las barras, ¿qué valor mínimo
de ms es necesario para que los collarines permanezcan en equilibrio
en la posición mostrada? (Suponga que el deslizamiento es inminente en A y B).
9.158 Los ejes del remolque de la figura están soportados por
chumaceras. El radio de las ruedas es de 75 mm, el radio de los
ejes es de 15 mm y el coeficiente de fricción cinética entre los ejes
y las chumaceras es mk 0.14. La masa del remolque y su carga
es de 160 kg. Si el peso del remolque y su carga está igualmente
repartido entre los ejes, ¿qué fuerza P se necesita para empujar el
remolque a velocidad constante?
P
Problema 9.158
9.159 Las dos poleas mostradas tienen radios de 6 pulg y están
montadas sobre ejes de 1 pulg de radio soportados por chumaceras.
Ignore los pesos de las poleas y de los ejes. El coeficiente de fricción
cinética entre los ejes y las chumaceras es mk 0.2. Si se requiere
una fuerza T 200 lb para elevar al hombre a velocidad constante,
¿cuál es su peso?
B
45
20
A
9.160 Si el hombre del problema 9.159 pesa 160 lb, ¿qué fuerza T
se necesita para bajarlo a velocidad constante?
Problemas 9.154/9.155
9.156 La abrazadera mostrada comprime entres sí dos piezas
de madera. El paso de las roscas es p 2 mm, el radio medio de
la rosca es r 8 mm y el coeficiente de fricción cinética entre la
rosca y la ranura correspondiente es 0.24. ¿Qué par debe aplicarse
al eje roscado para que comprima las piezas de madera con una
fuerza de 200 N?
9.157 En el problema 9.156, el coeficiente de fricción estática
entre la rosca y la ranura correspondiente es 0.28. Después de girar
el eje roscado lo suficiente para comprimir las piezas de madera
con una fuerza de 200 N, ¿qué par debe aplicarse sobre el eje para
que la abrazadera empiece a aflojarse?
125 mm
125 mm
125 mm
B
50 mm
T
E
A
50 mm
C
50 mm
Problemas 9.159/9.160
D
Problemas 9.156/9.157
Problemas de repaso
9.161 Si los dos cilindros de la figura se mantienen fijos, ¿en
qué intervalo de valores de W los dos pesos permanecerán en
reposo?
9.162 Si el sistema mostrado está inicialmente en reposo y el
cilindro izquierdo se hace girar con lentitud, determine el máximo
peso que puede
a) subirse;
b) bajarse.
ms 0.30
mk 0.28
ms 0.34
mk 0.32
100 lb
W
483
Proyecto de diseño 1
La cuña mostrada se usa para partir madera al introducirla en
un tronco como muestra la figura (vea el ejemplo activo 9.4).
Suponga que se desea diseñar una cuña de este tipo para su
uso comercial. Los experimentos indican que el coeficiente
de fricción estática entre la cuña de acero y diferentes tipos de
madera varía de 0.2 a 0.4.
a) Con base en el intervalo dado para los coeficientes de
fricción estática, determine el ángulo a máximo para el cual
la cuña permanecerá en su sitio en un tronco sobre el cual no
se ejerce ninguna fuerza externa.
b) Usando el ángulo de la cuña determinado en el inciso (a), y
suponiendo que el coeficiente de fricción cinética es 0.9 veces
el coeficiente de fricción estática, determine el intervalo de
fuerzas verticales necesarias para introducir la cuña dentro
de un tronco a velocidad constante.
c) Escriba un breve reporte donde describa su análisis y
recomiende un ángulo de cuña para el producto terminado.
Considere si sería apropiado tener un margen de seguridad
para el ángulo de cuña elegido.
Problemas 9.161/9.162
a
Proyecto de diseño 2
Diseñe y construya un dispositivo para medir el coeficiente de
fricción estática ms entre dos materiales. Utilícelo para medir ms
para varios de los materiales listados en la tabla 9.1 y compare
sus resultados con los valores de la tabla. Analice las posibles
fuentes de error en su dispositivo y determine cuán cercanos son
sus valores al realizar experimentos repetidos con los mismos
dos materiales.
CAPÍTULO
10
Fuerzas y momentos internos
El estudio del equilibrio se inició dibujando diagramas de cuerpo
libre de objetos individuales para determinar las fuerzas y los
momentos desconocidos que actúan sobre ellos. En este capítulo
se lleva a cabo este proceso un paso adelante y se dibujan diagramas de cuerpo libre de partes de objetos para determinar las
fuerzas y los momentos internos. Al hacerlo se llega al punto de
interés principal para el ingeniero de diseño: las fuerzas dentro
de un objeto que determinan si éste soportará las cargas externas
a las que se encuentra sometido.
La fuerza ejercida por el agua sobre la ventana de vidrio se distribuye sobre
toda el área de la ventana. En este capítulo se analizan las cargas distribuidas
en vigas, en cables suspendidos y en líquidos en reposo.
p
486
Capítulo 10 Fuerzas y momentos internos
VIGAS
10.1 Fuerza axial, fuerza cortante y momento flector
ANTECEDENTES
Para asegurar que un elemento estructural no falle (se rompa o colapse) debido a
las fuerzas y los momentos que actúan sobre él, el ingeniero de diseño debe conocer
no sólo las cargas y reacciones externas, sino también las fuerzas y los momentos
que actúan dentro del elemento.
Considere una viga sometida a una carga y reacciones externas (figura 10.1a).
¿Cómo se pueden determinar las fuerzas y los momentos dentro de la viga? En la
figura 10.1b se “corta” la viga con un plano en una sección transversal arbitraria y
se aísla la parte de la viga que se encuentra a la izquierda del plano. Resulta claro
que la parte aislada no puede estar en equilibrio a menos que esté sometida a cierto sistema de fuerzas y momentos en el plano en que se une a la otra parte de la
viga. Éstas son las fuerzas y momentos internos que se buscan.
En el capítulo 4 se demostró que cualquier sistema de fuerzas y momentos
puede representarse mediante un sistema equivalente que consiste en una fuerza y
un par. Como el sistema de cargas externas y reacciones sobre la viga es bidimensional, se pueden representar las fuerzas y los momentos internos por medio de un
sistema equivalente que consiste en dos componentes de fuerza y un par (figura
10.1c). La componente P paralela al eje de la viga se llama fuerza axial. La componente V normal al eje de la viga se llama fuerza cortante, y el par M se llama
momento flector. En la figura 10.1d se muestran la fuerza axial, la fuerza cortante
y
F
y
B
A
F
x
B
Ay
y
F
y
B
A
x
B
Ay
Ay
(a)
(b)
y
M
x
P
V
Ay
(c)
y
M
F
V
x
P
B
(d)
Figura 10.1
(a) Viga sometida a una carga y reacciones.
(b) Aislamiento de una parte de la viga.
(c), (d) Fuerza axial, fuerza cortante y
momento flector.
10.1 Fuerza axial, fuerza cortante y momento flector
y
y
M
V
V
M
x
x
(a)
(b)
Figura 10.2
(a) Las fuerzas cortantes positivas tienden a hacer girar el eje de la viga en el
sentido de las manecillas del reloj.
(b) Los momentos flectores positivos tienden a flexionar el eje de la viga hacia
arriba.
y el momento flector en el diagrama de cuerpo libre de la parte de la viga que se
encuentra a la derecha del plano. Observe que son iguales en magnitud pero opuestas en dirección a las fuerzas y el momento internos del diagrama de cuerpo libre
de la figura 10.1c.
En las figuras 10.1c y 10.1d las direcciones de la fuerza axial, de la fuerza
cortante y del momento flector son las definiciones establecidas de las direcciones
positivas de esas cantidades. Una fuerza axial positiva P somete la viga a tensión.
Una fuerza cortante positiva V tiende a hacer girar el eje de la viga en el sentido
de las manecillas del reloj (figura 10.2a). Un momento flector positivo M tiende a
ocasionar una curvatura del eje de la viga hacia arriba (figura 10.2b). Observe que
un momento flector positivo somete a la parte superior de la viga a compresión,
acortando la viga en la dirección paralela a su eje, y somete a la parte inferior de
la viga a tensión, alargando la viga en la dirección paralela a su eje.
RESULTADOS
y
La fuerza axial P, la fuerza cortante V y el momento flector M constituyen un sistema equivalente que representa las fuerzas y el momento
internos en una sección transversal de una viga.
Éstas son sus direcciones positivas definidas.
M
P
x
V
y
V
P
x
M
Por lo general, la determinación de los valores de P, V y M en una sección
transversal particular de una viga implica llevar a cabo tres pasos:
1. Dibujar el diagrama de cuerpo libre de la viga y determinar las
reacciones en sus soportes.
2. Pasar un plano a través de la viga en la sección transversal donde se
desee determinar las fuerzas internas y el momento. Dibujar el diagrama de cuerpo libre de una de las partes resultantes, mostrando P, V y
M en sus direcciones positivas definidas.
3. Aplicar las ecuaciones de equilibrio para determinar P, V y M.
487
488
Capítulo 10 Fuerzas y momentos internos
Determinación de las fuerzas y el momento internos
Ejemplo activo 10.1
( Relacionado con el problema 10.1)
Determine las fuerzas y el momento internos en el punto C de la viga mostrada.
y
A
1
L
4
F
B
C
3
L
4
1
L
4
Estrategia
Primero se debe dibujar el diagrama de cuerpo libre de toda la viga y determinar
las reacciones en A y B. Después se cortará la viga mediante un plano en C y se
dibujará el diagrama de cuerpo libre de la parte de la viga a la izquierda del plano.
Mediante la aplicación de las ecuaciones de equilibrio, se obtendrán los valores de
las fuerzas internas y el momento en C.
Solución
y
F
A
Ax
B
Ay
x
B
3
L
4
1
L
4
Fx Ax 0,
Fy Ay B F 0,
MpuntoA LB Dibuje el diagrama de cuerpo
libre de toda la viga y aplique el
equilibrio para determinar las
reacciones en sus soportes.
4 L F 0.
3
Resolviendo se obtiene Ax 0, Ay 3
1
F, y B F.
4
4
y
F
x
3
F
4
C
1
F
4
y
MC
PC
1
F
4
Fx PC 0,
1
Fy F VC 0,
4
1
1
F 0.
MpuntoC MC L
4
4
1
1
Resolviendo se obtienePC 0, VC F, y MC LF.
4
16
1
L
4
x
VC
Pase un plano por la viga en el punto C. Dibuje el diagrama de cuerpo libre de la parte de
la viga a la izquierda de C. Aplique el equilibrio para determinar las fuerzas y el momento
internos.
Problema de práctica Determine las fuerzas y el momento internos en C pasando un
plano a través de la viga en C y dibujando el diagrama de cuerpo libre de la parte de la
viga a la derecha de C.
Respuesta: PC = 0, VC = 41 F, MC =
1
16 LF.
10.1 Fuerza axial, fuerza cortante y momento flector
489
Determinación de las fuerzas y el momento interno ( Relacionado con el problema 10.8)
Ejemplo 10.2
En la viga mostrada, determine las fuerzas y el momento interno en B.
Estrategia
Para determinar las reacciones en los soportes, se representará la carga distribuida
triangular mediante una fuerza equivalente. Después se determinarán las fuerzas y
el momento interno en B cortando la viga con un plano en ese punto y dibujando el
diagrama de cuerpo libre de la parte de la viga que se encuentra a la izquierda del
plano, incluyendo la parte de la carga distribuida a la izquierda del plano.
y
60 N/m
A
C
B
3m
x
3m
6m
Solución
Determinación de las fuerzas y los momentos externos Se dibuja el diagrama
de cuerpo libre de la viga y se representa la carga distribuida con una fuerza equivalente en la figura a. Las ecuaciones de equilibrio son
y
2
(6 m)
3
©Fx = Ax = 0,
©Fy = Ay + C - 180 N = 0
A
Ax
B
Ay
Mpunto A (12 m)C (4 m)(180 N) 0
Resolviéndolas, se obtiene Ax = 0, Ay = 120 N, y C = 60 N.
Dibujo del diagrama de cuerpo libre de una parte de la viga Se corta la viga
en B y se obtiene el diagrama de cuerpo libre de la figura b. Como B se encuentra en el punto medio de la carga triangular distribuida, el valor de la carga distribuida en B es de 30 N/m. Representando la carga distribuida de la figura b mediante
una fuerza equivalente, se obtiene el diagrama de cuerpo libre de la figura c. De las
ecuaciones de equilibrio
(a) Diagrama de cuerpo libre de toda
la viga con la carga distribuida
representada por una fuerza
equivalente.
60
N/m
y
B
120 N
120 N
C
60 N
30 N/m
y
Mpunto B MB (1 m)(45 N) (3 m)(120 N) 0,
se obtiene PB 0, VB 75 N y MB 315 N-m.
C
12 m
©Fx = PB = 0,
©Fy = 120 N - 45 N - VB = 0,
1
(6 m)(60 N/m) 180 N
2
C x
3m
B
MB
PB
x
VB
(b)
Razonamiento crítico
y
Si se intenta determinar las fuerzas y el momento internos en B cortando el dia1
2
(3 m)(30 N/m) 45 N
grama de cuerpo libre de la figura a en B, no se obtendrán resultados correctos 3 m
2 M
3
B
(puede confirmarse que el diagrama de cuerpo libre resultante de la parte de la
x
PB
B
viga a la izquierda de B da PB 0, VB 120 N y MB 360 N-m). La razón es
3m
VB
120 N
que no se está considerando en forma correcta el efecto de la carga distribuida en
(c)
el diagrama de cuerpo libre. Se debe esperar hasta después de haber obtenido el
diagrama de cuerpo libre de una parte de la viga para representar las cargas dis- (b), (c) Diagrama de cuerpo libre de la parte
tribuidas con fuerzas equivalentes.
de la viga a la izquierda de B.
x
490
Capítulo 10 Fuerzas y momentos internos
Problemas
10.1 En el ejemplo activo 10.1, suponga que la distancia
a 1 L.
desde el punto A hasta el punto C se incrementa de 41 L to
2
Trace un bosquejo de la viga con C en su nueva posición.
Determine las fuerzas internas y el momento interno en C.
10.4 Determine las fuerzas y el momento interno en el punto A
de la figura.
y
400 lb
100 lb
10.2 La magnitud de la carga distribuida triangular mostrada es
w0 = 2 kN/m. Determine las fuerzas y el momento interno en A.
x
3 pies
y
900 pies-lb
A
4 pies
w0
3 pies
4 pies
Problema 10.4
A
x
10.5 El tubo mostrado tiene un soporte fijo en el extremo izquierdo. Determine las fuerzas y el momento interno en el punto A.
0.4 m
0.6 m
0.6 m
Problema 10.2
2 kN
20
y
10.3 La abrazadera C mostrada ejerce fuerzas de 30 lb sobre el
objeto que sostiene. Determine las fuerzas y el momento interno
en el punto A de la abrazadera.
2 kN
x
A
0.2 m
0.2 m
0.2 m
0.2 m
Problema 10.5
10.6 Determine las fuerzas y el momento interno del punto A
mostrado para cada carga.
y
2m
8 kN
x
A
2 pulg
1m
y
4m
A
x
(a)
y
Problema 10.3
2 kN/m
x
A
1m
4m
(b)
Problema 10.6
Problemas
10.7 Modele el peldaño de escalera mostrado como una viga
apoyada simplemente (soporte de pasador), y suponga que la
carga de 750 N ejercida por el pie de la persona está uniformemente distribuida. Determine las fuerzas y el momento interno en A.
y
491
10.11 Determine las fuerzas y el momento interno en el punto A
mostrado para las cargas de a) y de b).
10.12 Determine las fuerzas y el momento interno en el punto B
mostrado para las cargas de a) y de b).
60 lb/pie
(a)
250 mm
200 mm
A
A
B
3 pies
4 pies
x
100 mm
375 mm
5 pies
6 pies
240 lb
A
(b)
Problema 10.7
3 pies
2
pies
10.8 En el ejemplo 10.2 suponga que la distancia desde el
punto A hasta el punto B aumenta de 3 m a 4 m. Trace un bosquejo de la viga con B en su nueva posición. Determine las fuerzas y
el momento interno en B.
180 lb
B
5 pies
4 pies
4 pies
Problemas 10.11/10.12
10.13 Determine las fuerzas y el momento interno en el punto A
mostrado.
10.9 Si x 3 pies en la figura, ¿qué valor tienen las fuerzas y el
momento interno en A?
300 lb/pie
200 lb/pie
10.10 Si x 4 pies en la figura, ¿qué valor tienen las fuerzas y
el momento interno en A?
A
6 pies
4
pies
8 pies
y
Problema 10.13
600 lb/pie
x
x
A
600 lb/pie
3 pies
10.14 Determine las fuerzas y el momento interno en el punto A
mostrado.
3 pies
Problemas 10.9/10.10
10.15 Determine las fuerzas y el momento interno en el punto B
mostrado.
y
10 kN
A
x
B
1m
1m
1m
1m
1m
Problemas 10.14/10.15
492
Capítulo 10 Fuerzas y momentos internos
10.16 Determine las fuerzas y el momento interno en el punto A
mostrado.
10.17 Determine las fuerzas y el momento interno en el punto B
mostrado.
10.19 Determine las fuerzas y el momento interno en el punto A
del bastidor mostrado.
y
0.2 m
3 kN
A
0.2 m
x
0.4 m
0.2 m
y
600 N
0.4 m
A
B
x
0.2
m
0.2
m
0.8 m
Problema 10.19
0.6 m
10.20 Determine las fuerzas y el momento interno en el punto A
mostrado.
0.4 m
0.4 m
10.21 Determine las fuerzas y el momento interno en el punto B
mostrado.
Problemas 10.16/10.17
10.18 La tensión en la cuerda mostrada es de 10 kN. Determine
las fuerzas y el momento interno en el punto A.
y
4 kN/m
y
B
A
x
0.8 m
0.6 m
2m
0.6 m
x
A
3 kN
0.8 m
1m
1m
1m
0.8 m
Problemas 10.20/10.21
Problema 10.18
10.2 Diagramas de fuerza cortante y de momento flector
y
F
y
2
L
3
1
F
3
1
L
3
F
1
F
3
y
F
2
F
3
x
y
x
1
F
3
M
2
F
3
x
1
F
3
P
x
V
x
F
2
L
3
F
x
M
P
1
F
3
x
V
x
(b)
(a)
2
F
3
x
y
493
(c)
Figura 10.3
(a) Viga cargada con una fuerza F y su diagrama de cuerpo libre.
(b) Corte de la viga en una posición x arbitraria a la izquierda de F.
(c) Corte de la viga en una posición x arbitraria a la derecha de F.
10.2 Diagramas de fuerza cortante y de momento
flector
ANTECEDENTES
Para diseñar una viga, un ingeniero debe conocer las fuerzas y los momentos a través de toda su longitud. Son muy importantes los valores máximo y mínimo de la
fuerza cortante y del momento flector, y los puntos en que ocurren. En esta sección se muestra cómo determinar los valores de P, V y M como funciones de x y
se presentan los diagramas de fuerza cortante y de momento flector.
Considere una viga simplemente apoyada y cargada con una fuerza (figura
10.3a). En vez de cortar la viga en una sección específica para determinar las fuerzas y el momento interno, se corta en una posición arbitraria x entre el extremo
izquierdo y la carga F (figura 10.3b). Aplicando las ecuaciones de equilibrio a este
diagrama de cuerpo libre, se obtiene
P = 0
1
V = F u
3
1
M = Fx
3
y
2
0 6 x 6 L.
3
F
x
1
F
3
Para determinar las fuerzas y el momento interno para valores de x mayores
que
se obtiene un diagrama de cuerpo libre cortando la viga en una posición
arbitraria x entre la carga F y el extremo derecho de la viga (figura 10.3c). Los
resultados son
2
3 L,
P = 0
2
V = - F
u
3
2
M = F1L - x2
3
2
L 6 x 6 L.
3
Los diagramas de fuerza cortante y de momento flector son simplemente las gráficas de V y M, respectivamente, como funciones de x (figura 10.4). Estos diagramas
permiten ver los cambios en la fuerza cortante y en el momento flector a lo largo
de la viga, así como sus valores máximo y mínimo (máximo significa la menor
cota superior de la fuerza cortante o el momento flector y mínimo significa la
mayor cota inferior).
2
L
3
1
L
3
2
F
3
V
1
F
3
x
2
F
3
M
2
FL
9
x
Figura 10.4
Los diagramas de fuerza cortante y de momento
flector indican los valores máximo y mínimo de
V y M.
494
Capítulo 10 Fuerzas y momentos internos
Así, se pueden determinar las distribuciones de las fuerzas y del momento
interno en una viga considerando un plano a una distancia arbitraria x del extremo y estableciendo P, V y M como funciones de x. Según la complejidad de la
carga, deberán dibujarse varios diagramas de cuerpo libre para determinar las distribuciones sobre la longitud total de la viga. Las ecuaciones resultantes para V y M
permiten dibujar los diagramas de fuerza cortante y de momento flector.
RESULTADOS
Los valores de P, V y M pueden determinarse
como funciones de x al pasar un plano a través de
una viga en una posición arbitraria x. Según las
cargas y los soportes, puede ser necesario dibujar
varios diagramas de cuerpo libre para determinar
las distribuciones en toda la viga.
y
M
V
x
Los diagramas de fuerza cortante y de momento
flector para una viga son simplemente las gráficas
de V y M en función de x.
Ejemplo activo 10.3
x
P
Diagramas de fuerza cortante y de momento flector
( Relacionado con el problema 10.27)
Determine la fuerza cortante V y el momento flector M para la viga mostrada como
funciones de x en 0 x 2 m.
y
A
40 kN/m
60 kN
B
C
x
2m
2m
Estrategia
Primero se debe dibujar el diagrama de cuerpo libre de toda la viga y determinar
las reacciones en A y B. Después se cortará la viga mediante un plano en una posición arbitraria x entre A y B para obtener funciones para V y M que sean válidas
en el intervalo 0 x 2 m.
Solución
y
(2 m)(40 kN/m) 80 kN
60 kN
A
x
B
A
C
Bx
By
1m
2m
2m
Dibuje el diagrama de
cuerpo libre de toda la viga. La carga distribuida se
representa mediante una
fuerza equivalente.
10.2 Diagramas de fuerza cortante y de momento flector
Fx Bx 0,
Fy A By 80 kN 60 kN 0,
Aplique el equilibrio
para determinar las
reacciones en A y B.
Mpunto A (2 m)By (1 m)(80 kN) (4 m)(60 kN) 0.
Resolviendo se obtiene A 100 kN, Bx 0, y By 80 kN.
Pase un plano a través de la viga en
una posición arbitraria x entre A y B.
La carga distribuida no debe representarse mediante una fuerza equivalente
antes de aislar una parte de la viga.
y
60 kN
40 kN/m
x
A
B
100 kN
C
80 kN
x
y
40 kN/m
M
P
A
100 kN
V
y
1
x
2
40x
M
P
A
100 kN
V
Fx P 0,
Fy 100 40x V 0,
Mextremo derecho M 100x 2 x (40x) 0.
1
Resolviendo se obtiene
V 100 40x kN
M 100x 20x2 kN-m
Aplique el equilibrio para determinar V y M.
0 x 2 m.
Problema de práctica a) Determine la fuerza cortante V y el momento flector M para
la viga mostrada como funciones de x en 2 x 4 m. b) Dibuje los diagramas de fuerza cortante y de momento flector para toda la viga.
Respuesta: V 60 kN, M 60(4 x) kN-m.
495
496
Capítulo 10 Fuerzas y momentos internos
Problemas
10.22 En la figura, a) determine la fuerza cortante y el momento
flector como funciones de x.
Estrategia: Corte la viga en una posición x arbitraria y dibuje
el diagrama de cuerpo libre de la parte de la viga que se encuentra
a la izquierda del plano.
10.26 Determine la fuerza cortante y el momento flector como
funciones de x para 0 x 2 m.
y
3600 N-m
y
x
400 lb
2m
4m
x
Problema 10.26
3 pies
Problema 10.22
10.23 En la figura, a) determine la fuerza cortante y el momento
flector como funciones de x.
b) Dibuje los diagramas de fuerza cortante y de momento flector.
y
48 kN/ m
x
10.27 En el ejemplo activo 10.3, suponga que la carga distribuida de 40 kN/m se extiende a través de la viga desde A hasta
C. Trace un bosquejo de la viga con su carga nueva. Determine
la fuerza cortante V y el momento flector M en la viga como funciones de x para 2 x 4 m.
10.28 En la figura, a) determine las fuerzas y el momento interno como funciones de x.
b) Dibuje los diagramas de fuerza cortante y de momento flector.
y
100 lb/pies
6m
Problema 10.23
x
10.24 En la figura, a) determine la fuerza cortante y el momento
flector como funciones de x.
b) Demuestre que las ecuaciones para V y M en función de x satisfacen la ecuación V dM/dx.
Estrategia: Para el inciso a), corte la viga en una posición x
arbitraria y dibuje el diagrama de cuerpo libre de la parte de la
viga que se encuentra a la derecha del plano.
10.25 Dibuje los diagramas de fuerza cortante y de momento
flector.
6 pies
6 pies
Problema 10.28
10.29 En la figura, se tienen las cargas F 200 N y C 800 N-m.
a) Determine las fuerzas y el momento interno como funciones
de x.
b) Dibuje los diagramas de fuerza cortante y de momento flector.
10.30 La viga que se muestra en la figura soportará de manera
segura fuerza cortante y momentos flectores de 2 kN y de 6.5 kN-m,
respectivamente. Con base en este criterio, ¿es seguro que quede
sometida a las cargas F 1 kN y C 1.6 kN-m?
y
60 lb/pie
x
F
y
12 pies
C
x
Problemas 10.24/10.25
4m
4m
8m
Problemas 10.29/10.30
497
Problemas
10.31 Modele el peldaño de la escalera mostrada como una viga
simplemente apoyada (soporte de pasador), y suponga que la
carga de 750 N ejercida por el pie de la persona está uniformemente
distribuida. Dibuje los diagramas de fuerza cortante y de momento
flector.
10.32 ¿Qué valor tiene el máximo momento flector en el travesaño de la escalera del problema 10.31 y dónde ocurre?
10.34 Las vigas homogéneas AB y CD mostradas pesan 600 lb
y 500 lb respectivamente. Dibuje los diagramas de fuerza cortante y
de momento flector para la viga AB.
10.35 Las vigas homogéneas AB y CD mostradas pesan 600 lb
y 500 lb respectivamente. Dibuje los diagramas de fuerza cortante y
de momento flector para la viga CD.
6 pies
y
B
A
C
200 lb
D
2 pies
5 pies
Problemas 10.34/10.35
x
200 mm
100 mm
375 mm
10.36 Para la viga mostrada, determine la fuerza cortante V y el
momento flector M como funciones de x para 0 x 3 pies.
Problemas 10.31/10.32
10.37 Para la viga mostrada, dibuje los diagramas de fuerza cortante y de momento flector.
10.33 Suponga que la superficie sobre la que descansa la viga
mostrada ejerce una carga uniformemente distribuida. Dibuje los
diagramas de fuerza cortante y de momento flector.
y
600 lb/pie
x
y
4 kN
2 kN
600 lb/pie
x
2m
1m
6m
Problema 10.33
3 pies
3 pies
Problemas 10.36/10.37
498
Capítulo 10 Fuerzas y momentos internos
10.38 En estudios preliminares de diseño, las fuerzas verticales sobre el ala de un avión se modelan como se muestra en la figura. La carga
distribuida representa las fuerzas aerodinámicas y la fuerza ejercida por el peso del ala. La fuerza de 80 kN en x 4.4 m representa la fuerza ejercida por el peso del motor. Dibuje los diagramas de fuerza cortante y de momento cortante para el ala en el intervalo 0 x 4.4 m.
10.39 Dibuje los diagramas de fuerza cortante y de momento flector para toda el ala del problema 10.38.
y
50 kN/m
x
80 kN
4.4 m
13.0 m
Problemas 10.38/10.39
10.40* Dibuje los diagramas de fuerza cortante y de momento flector para la viga mostrada.
y
20 kN-m
4 kN/m
x
6 kN
6m
6m
6m
Problema 10.40
10.3 Relaciones entre carga distribuida, fuerza
cortante y momento flector
ANTECEDENTES
La fuerza cortante y el momento flector en una viga sometida a una carga distribuida se rigen por ecuaciones diferenciales simples. En esta ecuación se deducirán
esas ecuaciones y se mostrará que son una manera interesante e instructiva de
obtener los diagramas de fuerza cortante y de momento flector. Estas ecuaciones
también son útiles para determinar deformaciones de las vigas.
Suponga que una parte de una viga está sometida a una carga distribuida w
(figura 10.5a). En la figura 10.5b se obtiene un diagrama de cuerpo libre cortando
la viga en x y en x x. Los términos P, V y M son los cambios en la fuerza
10.3 Relaciones entre carga distribuida, fuerza cortante y momento flector
axial, en la fuerza cortante y en el momento flector, respectivamente, de x a x x.
La suma de las fuerzas en la dirección x es
499
w
y
Fx P P P 0.
x
Al dividir esta ecuación entre x y al tomar el límite cuando x → 0, se obtiene
dP
= 0,
dx
(a)
w
y
que simplemente establece que la fuerza axial no depende de x en una parte de la
viga sujeta sólo a una carga distribuida lateral. Para sumar las fuerzas del diagrama de cuerpo libre en la dirección y, es necesario determinar la fuerza ejercida por
la carga distribuida. En la figura 10.5b se presenta una coordenada xN que mide la
distancia desde el borde izquierdo del diagrama de cuerpo libre. En términos de
esta coordenada, la fuerza hacia abajo ejercida sobre el diagrama de cuerpo libre
por la carga distribuida es
x
x
x
¢x
w1x + xN 2 dxN ,
L0
donde w1x + xN 2 denota el valor de w en x + xN . Para evaluar esta integral, se
expresa w1x + xN 2 como una serie de Taylor en términos de xN :
w1x + xN 2 = w1x2 +
d w1x2
dx
xN +
2
1 d w1x2 2
xN + Á .
2 dx2
(10.1)
Sustituyendo esta ecuación en la expresión integral para la fuerza hacia abajo e
integrando término por término, se obtiene
¢x
L0
w1x + xN 2 d xN = w1x2¢x +
1 d w1x2
1¢x22 + Á = 0.
2 dx
Al dividir entre x y tomar el límite cuando x → 0, se obtiene
dV
= - w,
dx
(10.2)
donde w = w1x2.
Ahora se quiere sumar los momentos respecto al punto Q en el diagrama de
cuerpo libre de la figura 10.5b. El momento contrario al sentido de las manecillas
del reloj respecto a Q debido a la carga distribuida es
¢x
L0
xN w1x + xN 2 d xN .
Sustituyendo la ecuación (10.1) e integrando término por término, el momento en
el sentido de las manecillas del reloj respecto a Q es
¢x
L0
xN w1x + xN 2 d xN =
1
1 d w1x2
w1x21¢x22 +
1¢x23 + Á .
2
3 dx
Por lo tanto, la suma de los momentos respecto a Q es
Mpunto Q M M M (V V) x
-
1
1 d w1x2
w1x21¢x22 1¢x23 + Á = 0.
2
3 dx
M
P
M M
V
P P
Q
x
x^
V V
(b)
1 d w1x2
1¢x22 + Á .
2 dx
Por lo tanto, la suma de las fuerzas en el diagrama de cuerpo libre en la dirección y es
©Fy = V - V - ¢V - w1x2¢x -
w
y
Figura 10.5
(a) Porción de una viga sometida a una fuerza
distribuida w.
(b) Obtención del diagrama de cuerpo libre de
un elemento de la viga.
x
500
Capítulo 10 Fuerzas y momentos internos
Dividiendo entre x y tomando el límite cuando x → 0 se obtiene
y
F
x
(a)
y
F
x
y
(10.3)
En principio, se pueden usar las ecuaciones (10.2) y (10.3) para determinar los diagramas de fuerza cortante y momento flector de una viga. La ecuación (10.2) se
puede integrar para determinar V en función de x, luego puede integrarse la ecuación (10.3) para determinar M en función de x. Sin embargo, estas ecuaciones se
dedujeron para un segmento de viga sometido sólo a una carga distribuida. Para
aplicarlas a cargas más generales, deben tomarse en cuenta los efectos de cualesquiera fuerzas puntuales y pares que actúen sobre la viga.
Ahora se verá qué le sucede a dichos diagramas cuando una viga se somete
a una fuerza F que actúa en la dirección y positiva (figura 10.6a). Cortando la viga
justo a la izquierda y a la derecha de la fuerza, se obtiene el diagrama de cuerpo
libre de la figura 10.6b, donde los subíndices y denotan valores a la izquierda y a la derecha de la fuerza, respectivamente. Para el equilibrio se requiere que
V V F,
F
M
dM
= V.
dx
M M 0.
M
P
P
x
V V
(b)
V
El diagrama de fuerza cortante presenta una discontinuidad de magnitud F (figura 10.6c), pero el diagrama de momento flector es continuo (figura 10.6d). El salto
en la fuerza cortante es positivo si la fuerza actúa en la dirección y positiva.
Ahora se verá qué sucede en los diagramas de fuerza cortante y de momento
flector cuando una viga está sometida a un par con sentido contrario al de las manecillas del reloj C (figura 10.7a). Cortando la viga justo a la izquierda y a la derecha
del par (figura 10.7b), se determina que
V V 0,
F
M M C.
x
(c)
M
El diagrama de fuerza cortante es continuo (figura 10.7c), pero el diagrama de
momento flector presenta una discontinuidad de magnitud C (figura 10.7d) en el
punto donde la viga está sometida al par. El salto en el momento flector es negativo si el par actúa en sentido contrario al de las manecillas del reloj.
Ahora se tienen los resultados necesarios para construir los diagramas de fuerza cortante y de momento flector.
Construcción del diagrama de fuerza cortante
x
(d)
Figura 10.6
(a) Porción de una viga sometida a una fuerza
F en la dirección y positiva.
(b) Obtención de un diagrama de cuerpo libre
cortando la viga a la izquierda y a la
derecha de F.
(c) El diagrama de fuerza cortante sufre un
salto positivo de magnitud F.
(d) El diagrama de momento flector es
continuo.
En un segmento de una viga que está sometido sólo a una carga distribuida, se ha
mostrado que la fuerza cortante se relaciona con la carga distribuida por
dV
= - w.
dx
(10.4)
Esta ecuación establece que la derivada, o pendiente, de la fuerza cortante con respecto a x es igual al negativo de la carga distribuida. Observe que si no hay carga
distribuida (w 0) a lo largo del segmento, la pendiente es cero y la fuerza cortante es constante. Si w es una constante a lo largo del segmento, la pendiente de
la fuerza cortante es constante, lo que significa que el diagrama de fuerza cortante para el segmento es una línea recta. Al integrar la ecuación (10.4) con respecto
a x desde una posición xA hasta una posición xB,
xB
x
B
dV
dx = w dx,
LxA dx
LxA
10.3 Relaciones entre carga distribuida, fuerza cortante y momento flector
501
y
se obtiene
xB
VB - VA = -
LxA
w dx.
C
x
El cambio en la fuerza cortante entre las dos posiciones es igual al negativo del
área definida por la curva de carga entre esas posiciones (figura 10.8):
VB VA (área definida por la carga distribuida desde xA hasta xB). (10.5)
Donde una viga está sometida a una fuerza puntual de magnitud F en la dirección
positiva de y, se ha demostrado que el diagrama de fuerza cortante experimenta un
aumento de magnitud F. Donde una viga está sujeta a un par, el diagrama de fuerza cortante no sufre ningún cambio (es continuo).
Ahora se demostrarán estos resultados determinando el diagrama de fuerza cortante para la viga de la figura 10.9. La viga está sometida a una fuerza F hacia abajo
que resulta en reacciones hacia arriba en A y C. Observe que no existe carga distribuida. El procedimiento aquí consiste en comenzar a la izquierda de la viga y
construir el diagrama de izquierda a derecha. En la figura 10.10a se muestra el incremento en el valor de V debido a la reacción hacia arriba en A. Como no hay carga
distribuida, el valor de V permanece constante entre A y B (figura 10.10b). En B, el
valor de V disminuye debido a la fuerza hacia abajo (figura 10.10c). El valor de V
permanece constante entre B y C, con lo que se completa el diagrama de fuerza cortante (figura 10.10d). Compare la figura 10.10d con el diagrama de fuerza cortante
obtenido en la figura 10.4 donde se dibujaron diagramas de cuerpo libre y se aplicaron las ecuaciones de equilibrio.
(a)
y
C
x
y
M
C
P
M
P
x
V V
(b)
V
Construcción del diagrama de momento flector
En un segmento de una viga sometida sólo a una carga distribuida, el momento
flector se relaciona con la fuerza cortante por
x
dM
= V,
dx
(10.6)
w
(c)
M
C
x
(d)
xA
V
xB
El negativo de esta
área es VB VA
x
VA
VB
xA
xB
x
Figura 10.8
El cambio en la fuerza cortante es igual al negativo del área
definida por la curva de carga.
Figura 10.7
(a) Porción de una viga sometida a un par C
con sentido inverso al de las manecillas
del reloj.
(b) Obtención de un diagrama de cuerpo libre
cortando la viga a la izquierda y a la
derecha de C.
(c) El diagrama de fuerza cortante es
continuo.
(d) El diagrama de momento flector experimenta un salto negativo de magnitud C.
502
Capítulo 10 Fuerzas y momentos internos
la cual establece que la pendiente del momento flector con respecto a x es igual a la
fuerza cortante. Si V es constante a lo largo del segmento, el diagrama de momento flector para el segmento es una línea recta. Integrando la ecuación (10.6) con
respecto a x desde una posición xA hasta una posición xB se obtiene
F
B
A
C
1
L
3
2
L
3
y
F
B
A
1
F
3
xB
C
x
2
F
3
Figura 10.9
Viga cargada con una fuerza F y su diagrama
de cuerpo libre.
MB - MA =
LxA
V dx.
El cambio en el momento flector entre dos posiciones es igual al área definida por
el diagrama de fuerza cortante entre esas posiciones (figura 10.11):
MB MA área definida por la fuerza cortante desde xA hasta xB.
(10.7)
Donde una viga está sometida a un par con sentido contrario al de las manecillas
del reloj de magnitud C, el diagrama de momento flector experimenta una disminución de magnitud C. Donde una viga está sujeta a una fuerza puntual, el diagrama
de momento flector no sufre ningún cambio.
Como un ejemplo, se determinará el diagrama de momento flector para la viga
de la figura 10.9. Se comienza con el diagrama de fuerza cortante que ya se determinó (figura 10.12a) y se procede a construir el diagrama de momento flector de
izquierda a derecha. La viga no está sometida a un par en A, por lo que MA 0.
Entre A y B, la pendiente del momento flector es constante (dMdx V F3), lo
y
F
B
A
x
1
F
3
V
(a)
1
F
3
(b)
V
1
F
3
2
L
3
Aumento en V
debido a la
reacción en A
1
L
3
2
F
3
x
Entre A y B,
dV
0
dx
x
Disminución en
V debido a la
fuerza en B
x
V
(c)
C
1
F
3
F
V
(d)
Figura 10.10
Construcción del diagrama de fuerza cortante
para la viga de la figura 10.9.
1
F
3
2
F
3
x
Entre B y C,
dV
0
dx
10.3 Relaciones entre carga distribuida, fuerza cortante y momento flector
503
V
xA
x
xB
Esta área es MB MA
M
MB
MA
xA
x
xB
Figura 10.11
El cambio en el momento flector es igual al área
definida por el diagrama de fuerza cortante.
V
(a)
1
F
3
A
2
F
3
M
(b)
2
LF
9
0
C
B
2
L
3
Entre A y B,
dM
const.
dx
1
L
3
área definida por el diagraMB ma de fuerza cortante entre
A y B.
x
M
(c)
x
2
LF
9
0
Entre B y C,
dM
const.
dx
x
que indica que el diagrama de momento flector entre A y B es una línea recta
(10.12b). El cambio en el momento flector desde A hasta B es igual al área definida por la fuerza cortante desde A hasta B.
MB - MA = 123 L2113 F2 = 29 LF.
Por lo tanto, MB 2LF9. La pendiente del momento flector también es
constante entre B y C (dMdx V 2F3), por lo que el diagrama de momento flector entre B y C es una línea recta. El cambio en el momento flector de B a
C es igual al área definida por la fuerza cortante entre B y C, o
MC - MB = 113 L21 - 23 F2 = - 29 LF,
Figura 10.12
Construcción del diagrama de momento flector
para la viga de la figura 10.9.
504
Capítulo 10 Fuerzas y momentos internos
de donde se obtiene MC MB 2LF9 0 (observe que en realidad no se necesitaba este cálculo para concluir que MC 0, porque la viga no está sometida a un par
en C). El diagrama de momento flector completo se presenta en la figura 10.12c;
compárelo con el diagrama de momento flector obtenido en la figura 10.4 donde se
dibujaron diagramas de cuerpo libre y se aplicaron las ecuaciones de equilibrio.
RESULTADOS
w
En un segmento de una viga que está sometida
sólo a una carga distribuida, la fuerza cortante
se relaciona con la carga distribuida por
dV
(10.4)
w.
dx
El cambio en la fuerza cortante entre dos posiciones es igual al negativo del área definida
por la curva de carga entre esas posiciones.
área definida por w
VB VA desde xA hasta xB
xA
V
xB
El negativo de esta
área es VB VA
x
(10.5)
VA
VB
xA
xB
xA
xB
x
V
En un segmento de una viga que está sometido
sólo a una carga distribuida, el momento flector
se relaciona con la fuerza cortante por
dM
V.
(10.6)
dx
El cambio en el momento flector entre dos posiciones es igual al área definida por la fuerza
cortante entre esas posiciones.
área definida por V
MB MA desde xA hasta xB
x
Esta área es MB MA
M
(10.7)
MB
MA
xA
xB
x
10.3 Relaciones entre carga distribuida, fuerza cortante y momento flector
y
F
x
Donde una viga está sometida a
una fuerza F en la dirección positiva de y, el diagrama de fuerza cortante experimenta un aumento de
magnitud F . El diagrama de momento flector es continuo.
V
F
x
M
x
y
C
x
V
Donde una viga está sometida a un
par en sentido contrario al de las manecillas del reloj, el diagrama de momento flector experimenta una disminución de magnitud C. El diagrama
de fuerza cortante es continuo.
x
M
C
x
505
506
Capítulo 10 Fuerzas y momentos internos
Ejemplo activo 10.4
Diagramas de fuerza cortante y momento flector usando las
ecuaciones (10.4) a (10.7) ( Relacionado con el problema 10.45)
Use las ecuaciones (10.4) y (10.5) para determinar el diagrama de fuerza cortante
para la viga mostrada.
y
A
40 kN/m
60 kN
B
C
x
2m
2m
Estrategia
El primer paso consiste en dibujar el diagrama de cuerpo libre de la viga y determinar las reacciones en A y B. Esto se hizo en el ejemplo activo 10.3. Se comenzará en
el extremo izquierdo de la viga y se avanzará hacia la derecha en la construcción del
diagrama de fuerza cortante.
Solución
y
Resulta útil pensar en comenzar justo
a la izquierda del extremo izquierdo de
la viga, con el valor inicial de la fuerza
cortante igual a cero. La reacción hacia
arriba de 100 kN en A ocasiona un aumento en la fuerza cortante de 100 kN
de magnitud.
60 kN
40 kN/m
x
A
B
100 kN
C
80 kN
2m
2m
V
Aumento de V debido a la
fuerza hacia arriba en A
100 kN
x
Entre A y B, la carga distribuida sobre la viga es
constante. Según la ecuación (10.4), que implica
que la pendiente del diagrama de fuerza cortante
entre A y B es constante, el diagrama es una línea recta. El cambio en V entre A y B puede determinarse a partir de la ecuación (10.5).
VB VA (2 m)(40 kN/m)
80 kN.
Por lo tanto V disminuye linealmente desde
100 kN en A hasta 100 kN – 80 kN 20 kN
en B. Este resultado también se puede obtener
integrando la ecuación (10.4):
V
L100
y
40 dx
L0
V 100 40x kN.
x
A
B
100 kN
V
100 kN
20 kN
C
80 kN
2m
x
dV 60 kN
40 kN/m
2m
Entre A y B,
dV
const.
dx
x
10.3 Relaciones entre carga distribuida, fuerza cortante y momento flector
507
y
60 kN
40 kN/m
x
A
La reacción hacia abajo de 80 kN en
B ocasiona una disminución en la
fuerza cortante de 80 kN de magnitud.
B
100 kN
C
80 kN
2m
2m
V
Disminución en V debida a la
fuerza B hacia abajo.
100 kN
20 kN
x
80 kN
y
60 kN
40 kN/m
x
A
Entre B y C no hay carga distribuida
sobre la viga. Según la ecuación
(10.4), esto implica que V es constante
entre B y C, con lo cual se completa el
diagrama de fuerza cortante.
B
100 kN
2m
C
80 kN
2m
V
100 kN
20 kN
60 kN
Problema de práctica Use las ecuaciones (10.6) y (10.7) para determinar el diagrama de momento flector para la viga mostrada.
Entre B y C,
dV
0
dx
x
508
Capítulo 10 Fuerzas y momentos internos
Ejemplo 10.5
Diagramas de fuerza cortante y momento flector usando las ecuaciones
(10.4) a (10.7 ( Relacionado con el problema 10.44)
Determine los diagramas de fuerza cortante y de momento flector para la viga
mostrada.
Estrategia
Se puede comenzar con el diagrama de cuerpo libre de la viga y usar las ecuaciones (10.4) y (10.5) para construir el diagrama de fuerza cortante. Luego puede usarse el diagrama de fuerza cortante y las ecuaciones (10.6) y (10.7) para construir el
diagrama de momento flector. Al determinar tanto el diagrama de fuerza cortante
como el de momento flector, se deben tomar en cuenta los efectos de las fuerzas puntuales y los pares que actúan sobre la viga.
y
300 N/m
A
B
6m
x
Solución
Diagrama de fuerza cortante El primer paso es dibujar el diagrama de cuerpo libre
de la viga y determinar las reacciones en el soporte empotrado A. Usando los resultados de este paso, que se muestran en la figura a, se procede a construir el diagrama
de fuerza cortante de izquierda a derecha. En la figura b se muestra el aumento en el
valor de V debido a la fuerza hacia arriba en A. Entre A y B, la carga distribuida sobre
la viga se incrementa linealmente de 0 a 300 N/m. Por lo tanto, la pendiente del diagrama de fuerza cortante disminuye en forma lineal de 0 a 300 Nm. En B, la fuerza cortante debe ser 0, porque no hay fuerza que actúe ahí. Con esta información, se
puede bosquejar el diagrama de fuerza cortante de manera cualitativa (figura c).
También se puede obtener una ecuación explícita para la fuerza cortante entre
A y B al integrar la ecuación (10.4). La carga distribuida como una función de x es
w (x6)300 50x Nm. Se escribe la ecuación (10.4) como
d V = - w d x = - 50 x d x
V
y
Aumento en V
debido a la fuerza en A
900 N
3600 N-m
A
6m
300 N/m
x
B
(b) 900 N
x
(a)
V
900 N
Entre A y B,
dV
w
dx
(c)
6m
VB 0
x
10.3 Relaciones entre carga distribuida, fuerza cortante y momento flector
509
e integre para determinar V en una posición arbitraria x:
V
LVA
x
dV =
- 50x dx
L0
V - VA = - 25x2.
Debido a la reacción hacia arriba de 900 N en A, VA 900 N, entonces se obtiene
V 900 25x2 N.
(1)
Diagrama de momento flector Se construye el diagrama de momento flector de
izquierda a derecha. En la figura d se muestra la disminución inicial en el valor de M
debido al par en sentido contrario al de las manecillas del reloj en A. Entre A y B,
la pendiente del diagrama de momento flector es igual a la fuerza cortante V. En el
diagrama de fuerza cortante (figura c), se observa que en A la pendiente del diagrama de momento flector tiene un valor positivo (900 N). Cuando x se incrementa, la
pendiente comienza a decrecer, y su razón de disminución crece hasta que el valor
de la pendiente llega a cero en B. En el punto B, se sabe que el valor del momento
flector es igual a cero, por que no existe un par que actúe sobre la viga en B. Usando esta información, se puede bosquejar el diagrama de momento flector en forma
cualitativa (figura e). Observe que su pendiente disminuye desde un valor positivo
en A hasta cero en B, y la razón a la que decrece aumenta conforme x crece.
Se puede obtener una ecuación para el momento flector entre A y B integrando
la ecuación (10.6). La fuerza cortante como una función de x está dada por la
ecuación (1). La ecuación (10.6) se escribe como
M
dM V dx (900 25x2) dx
x
y se integra:
(d) 3600
N-m
M
LMA
Disminución en M
debida al par en A
x
dM =
L0
1900 - 25x22 dx
M - MA = 900x -
25 3
3 x .
Como resultado del par de 3600 N-m con sentido contrario al de las manecillas del reloj en A, MA 3600 N-m,
de donde se obtiene la distribución del momento flector
M = - 3600 + 900x -
25 3
3 x
MB 0
M
A
(e)
3600
N-m
N-m.
Razonamiento crítico
Como se demostró en este ejemplo, las ecuaciones (10.4) a (10.7) pueden aplicarse de dos maneras. Proporcionan una base para obtener rápidamente bosquejos
cualitativos de los diagramas de fuerza cortante y de momento flector. Además,
pueden obtenerse ecuaciones explícitas para los diagramas al integrar las ecuaciones (10.4) y (10.6).
6m
Entre A y B,
dM
V
dx
x
510
Capítulo 10 Fuerzas y momentos internos
Problemas
Los siguientes problemas deben resolverse usando las
ecuaciones (10.4) a (10.7).
10.41 Dibuje los diagramas de fuerza cortante y de momento
flector de la viga mostrada en la figura.
10.44 Use el procedimiento descrito en el ejemplo 10.5 para
dibujar los diagramas de fuerza cortante y de momento flector de
la viga mostrada en la figura.
y
y
4 kN/m
50 lb
x
50 lb
x
4 pies
6m
Problema 10.44
4 pies
Problema 10.41
10.42 Dibuje los diagramas de fuerza cortante y de momento
flector de la viga mostrada en la figura.
y
10.45 En el ejemplo activo 10.4, suponga que la carga distribuida de 40 kN/m se extiende a lo largo de la viga desde A hasta
C. Trace un bosquejo de la viga con su nueva carga. Dibuje el diagrama de fuerza cortante para la viga.
10.46 Dibuje los diagramas de fuerza cortante y de momento
flector de la viga mostrada en la figura.
3600 N-m
x
2m
y
100 lb/pie
4m
x
Problema 10.42
6 pies
10.43 El arreglo mostrado en la figura se usa para someter un
segmento de una viga a un momento flector uniforme. Dibuje los
diagramas de fuerza cortante y de momento flector.
y
6 pies
Problema 10.46
10.47 Determine la fuerza cortante V y el momento flector M en
función de x, para la viga que se muestra en la figura.
y
x
600 lb/pie
x
50 lb
50 lb
600 lb/pie
6
pulg
12
pulg
Problema 10.43
6
pulg
3 pies
3 pies
Problema 10.47
Cables
10.48* Dibuje los diagramas de fuerza cortante y de momento
flector de la viga mostrada en la figura.
511
10.49 Dibuje los diagramas de fuerza cortante y de momento
flector de la viga AB mostrada en la figura.
y
y
20 kN-m
6 kN
4 kN/m
x
6m
6m
6m
400 N/m
B
A
x
Problema 10.48
2m
1m
1m
1m
Problema 10.49
CABLES
Por su combinación única de resistencia, poco peso y flexibilidad, las cuerdas y
cables se utilizan a menudo para soportar cargas y transmitir fuerzas en estructuras, máquinas y vehículos. Los grandes puentes colgantes están soportados por
enormes cables de acero. Los ingenieros utilizan cables para crear estructuras estéticas con espacios interiores abiertos (figura 10.13). En las siguientes secciones se
determinarán las tensiones en cuerdas y cables sometidos a cargas distribuidas y
discretas.
Figura 10.13
El uso de cables para suspender el techo de este
estadio deportivo permite a los espectadores
una visión no obstruida por columnas.
512
Capítulo 10 Fuerzas y momentos internos
10.4 Cargas uniformemente distribuidas a lo largo
de líneas rectas
ANTECEDENTES
El cable principal de un puente colgante es el ejemplo clásico de un cable sometido
a una carga uniformemente distribuida a lo largo de una línea recta (figura 10.14). El
peso del puente está (de manera aproximada) uniformemente distribuido en la horizontal. La carga transmitida al cable principal por el gran número de cables verticales se puede representar como una carga distribuida. En esta sección se determinará
la forma y la variación de la tensión en un cable cargado de esta forma.
Considere un cable suspendido sometido a una carga uniformemente distribuida a lo largo de una línea horizontal (figura 10.15a). Se ignora el peso del cable. El
origen del sistema coordenado está en el punto más bajo del cable. Sea la función
y(x) la curva descrita por el cable en el plano x-y. El objetivo consiste en determinar la curva y(x) y la tensión en el cable.
Forma del cable
Se obtiene un diagrama de cuerpo libre cortando el cable en su punto más bajo
y en una posición arbitraria x (figura 10.15b). El término T0 es la tensión en el
punto más bajo del cable, y T es la tensión en x. La fuerza hacia abajo ejercida por
la carga distribuida es wx. De este diagrama de cuerpo libre se obtienen las ecuaciones de equilibrio
T cos u T0,
T sen u wx.
(10.8)
Cable principal
Figura 10.14
(a) Cable principal de un puente colgante.
(b) La carga se distribuye horizontalmente.
(a)
(b)
y
(a)
x
w
T
Figura 10.15
(a) Cable sometido a una carga uniformemente
distribuida a lo largo de una línea
horizontal.
(b) Diagrama de cuerpo libre del cable entre
x 0 y una posición x arbitraria.
u
(b)
T0
w
x
10.4 Cargas uniformemente distribuidas a lo largo de líneas rectas
513
Se elimina la tensión T dividiendo la segunda ecuación entre la primera, para
obtener
tan u =
w
x = a x,
T0
donde
a =
w
.
T0
La pendiente del cable en x es dydx tan , por lo que se obtiene una ecuación
diferencial que define la curva descrita por el cable:
dy
= ax.
dx
(10.9)
Se ha escogido el sistema coordenado de manera que y 0 en x 0. Integrando
la ecuación (10.9),
y
L0
x
dy =
L0
ax dx,
se encuentra que la curva descrita por el cable es la parábola
y =
1 2
ax .
2
(10.10)
Tensión en el cable
Para determinar la distribución de la tensión en el cable, se elevan al cuadrado
ambos lados de las ecuaciones (10.8) y se suman para obtener
T = T0 21 + a 2x 2.
(10.11)
La tensión es mínima en el punto más bajo del cable y crece en forma monótona
con su distancia al punto más bajo.
Longitud del cable
En algunas aplicaciones es útil tener una expresión para la longitud del cable en
función de x. Se puede escribir la relación ds2 dx2 dy2, donde ds es un elemento de longitud del cable (figura 10.16), en la forma
y
dy 2
ds = 1 + a b dx.
dx
B
s ds
dy
Sustituyendo la ecuación (10.9) en esta expresión e integrando, se obtiene una
ecuación para la longitud s del cable en el intervalo horizontal de 0 a x:
dx
x
x
s =
1
1
e x21 + a 2x 2 + ln cax + 21 + a 2x 2 d f .
a
2
(10.12)
Figura 10.16
Longitud s del cable en el intervalo horizontal
de 0 a x.
514
Capítulo 10 Fuerzas y momentos internos
RESULTADOS
Un cable suspendido está sujeto a una carga vertical uniformemente distribuida a lo largo de una línea horizontal. El
origen del sistema coordenada está en el punto más bajo
del cable. La curva descrita por el cable es la parábola
1
(10.10)
y ax2.
2
El parámetro a w/T0, donde w es la magnitud de la
carga distribuida y T0 es la tensión en el cable en su punto
más bajo.
T T0 1 a2x2.
y
x
w
Tensión
Tensión en el cable en términos de la
tensión en el punto más bajo y la coordenada horizontal x respecto al punto
más bajo del cable.
(10.11)
y
T
T0
x
w
x
1
1
s
x 1 a2x2 a ln ax 1 a2x2 .
2
(10.12)
Longitud
Longitud del cable medida desde el
punto más bajo, x 0 hasta el punto
con coordenada horizontal x.
y
s
x
x
10.4 Cargas uniformemente distribuidas a lo largo de líneas rectas
Ejemplo activo 10.6
515
Cable con una carga distribuida horizontalmente
( Relacionado con el problema 10.50)
El cable de la figura soporta una carga distribuida de 100 lb/pie. ¿Cuál es la tensión
en su punto más bajo?
Estrategia
La posición horizontal del punto más bajo del cable no está dada. Sin embargo, las
coordenadas de cada punto de conexión respecto a un sistema coordenado con su
origen en el punto más bajo del cable deben satisfacer la ecuación (10.10). Con
estas condiciones se pueden determinar las coordenadas horizontales de los puntos
de conexión. La ecuación (10.10) puede utilizarse para determinar a wT0, lo
que proporciona la tensión en el punto más bajo.
40 pies
20 pies
100 lb/pie
Solución
40 pies
y
xL , yL
xR , yR
La ecuación (10.10) debe satisfacerse para ambos
puntos de conexión:
x
1
1 2
ax , yR 20 pies axR2 .
2
2 L
Dividiendo la primera ecuación entre la segunda,
se obtiene
yL 40 pies
Use la ecuación (10.10) para determinar las coordenadas horizontales de los puntos de conexión.
xL2
2.
xR2
El claro horizontal del cable es
xR xL 40 pies.
Al resolver estas dos ecuaciones se obtiene
xL 23.4 pies y xR 16.6 pies.
Sustituyendo las coordenadas del punto de
conexión derecho en la ecuación (10.10),
1
yR axR2:
2
1
20 pies a(16.6 pies)2,
2
y resolviendo se obtiene a 0.146 pies1.
Por lo tanto, la tensión en el punto más bajo es
w
T0 a
100 lb/pie
0.146 pies1
686 lb.
Use la ecuación (10.10) para determinar la tensión en el punto más bajo.
Problema de práctica Determine la tensión máxima en el cable.
Respuesta: 2440 lb.
516
Capítulo 10 Fuerzas y momentos internos
Ejemplo 10.7
Cable con una carga distribuida horizontalmente ( Relacionado con el problema 10.51)
La distancia horizontal entre las torres de soporte del puente Manhattan en Nueva
York es de 1470 pies. Las cúspides de las torres están a 145 pies sobre el punto más
bajo de los cables de soporte principales. Obtenga la ecuación de la curva descrita
por los cables.
Estrategia
Se conocen las coordenadas de los puntos de conexión de los cables respecto a sus
puntos más bajos. Sustituyendo las coordenadas en la ecuación (10.10) se puede determinar el parámetro a. Conocido a, la ecuación (10.10) describe la forma de los
cables.
Solución
Las coordenadas de la cúspide de la torre derecha de soporte respecto al punto más
bajo de los cables de soporte son xR 735 pies, yR 145 pies (figura a). Sustituyendo estos valores en la ecuación (10.10),
y =
145
ft =
145
pies
1 2
ax :
2
1
a(735 pies)
ft) 2, 2,
2
y
y 5 (2.68 3 10 –4 ) x2
xR, yR
x
(a) La curva teórica superpuesta en una fotografía del cable de
soporte.
Problemas
se obtiene a 5.37
y =
517
104 pie1. La curva descrita por los cables de soporte es
1 2
a x = 12.68 * 10- 42x 2.
2
En la figura a se compara esta parábola con la foto de los cables de soporte.
Razonamiento crítico
Al conocer las ubicaciones relativas de los puntos más alto y más bajo del cable
fue posible determinar el valor de a. Este parámetro no sólo determina la ecuación
que describe la forma del cable, como se demostró en este ejemplo, sino también
la razón de la carga distribuida w que actúa en el cable sobre la tensión en el cable
en su punto más bajo. Si también se conociera el valor de w, podría determinarse
la tensión a lo largo del cable mediante la ecuación (10.11).
Problemas
10.50 El cable mostrado soporta una carga uniformemente
distribuida w 12,000 lb/pie. Usando el método descrito en el
ejemplo activo 10.6, determine la tensión máxima en el cable.
10.53 En el problema 10.52, considere que el punto más bajo del
cable se encuentra a una distancia h debajo de las cúspides de las
torres que soportan el cable.
a) Si el cable soportará de manera segura una tensión de 70 kN,
¿cuál es el mínimo valor seguro de h?
b) Si h tiene el valor determinado en el inciso (a), ¿cuál es la
longitud del cable suspendido?
90 pies
40 pies
w
Problemas 10.52/10.53
100 pies
Problema 10.50
10.51 En el ejemplo 10.7, suponga que la tensión en el punto
más bajo de uno de los cables de soporte principales del puente es
de dos millones de libras. ¿Cuál es la tensión máxima en el cable?
10.52 Un cable se utiliza para suspender una tubería sobre un
río. La distancia entre las torres es de 36 m y el punto más bajo
del cable se encuentra 1.4 m abajo de las cúspides de las torres. La
masa total de la tubería suspendida es de 2700 kg.
a) ¿Cuál es la tensión máxima en el cable?
b) ¿Cuál es la longitud del cable suspendido?
10.54 El cable mostrado soporta una carga uniformemente distribuida w 750 N/m. El punto más bajo del cable se encuentra
0.18 m abajo de los puntos de conexión C y D. Determine las
cargas axiales en los elementos AC y BC de la armadura.
D
C
0.4 m
0.4 m
B
A
E
F
w
0.4 m
1.2 m
Problema 10.54
0.4 m
518
Capítulo 10 Fuerzas y momentos internos
10.55 El cable de la figura soporta un puente de ferrocarril entre
dos túneles. La carga distribuida es w 1 MN/m y h 40 m.
a) ¿Cuál es la tensión máxima en el cable?
b) ¿Cuál es la longitud del cable?
10.57 Un barco de investigaciones oceanográficas remolca un instrumento con un cable. La fuerza hidrodinámica de arrastre somete
al cable a una fuerza uniformemente distribuida w 2 lb/pie. Las
tensiones en el cable en 1 y 2 son de 800 lb y 1300 lb, respectivamente. Determine la distancia h.
10.56 El cable del problema 10.55 soportará de manera segura
una tensión de 40 MN. ¿Cuál es el cable más corto que se puede
utilizar y cuál es el valor correspondiente de h?
10.58 Dibuje una gráfica de la forma del cable en el
problema 10.57.
h
2
36 m
36 m
300
pies
h
1
w
Problemas 10.57/10.58
Problemas 10.55/10.56
10.5 Cargas distribuidas uniformemente
a lo largo de cables
ANTECEDENTES
El peso de un cable lo somete a una carga uniformemente distribuida en toda su
longitud. Si un cable se somete a fuerzas iguales y paralelas espaciadas uniformemente, la carga sobre el cable suele representarse uniformemente distribuida en
toda su longitud. En esta sección se muestra cómo determinar la forma resultante
del cable y la variación de su tensión.
Suponga que sobre un cable actúa una carga distribuida que somete cada elemento ds de su longitud a una fuerza w ds, donde w es constante. En la figura 10.17
se muestra el diagrama de cuerpo libre obtenido al cortar el cable en su punto más
bajo y en un punto a una distancia s. Los términos T0 y T son las tensiones en el
punto más bajo y en s, respectivamente. La carga distribuida ejerce una fuerza ws
hacia abajo. El origen del sistema coordenada se encuentra en el punto más bajo
del cable. Sea la función y(x) la curva descrita por el cable en el plano x-y. El objetivo es determinar y(x) y T.
10.5 Cargas distribuidas uniformemente a lo largo de cables
Forma del cable
519
y
A partir del diagrama de cuerpo libre de la figura 10.17, se obtienen las ecuaciones de equilibrio
T sen u ws,
(10.13)
T cos u T0.
(10.14)
T
u
Dividiendo la ecuación (10.13) entre la ecuación (10.14), se obtiene
s
w
tan u =
s = as,
T0
(10.15)
y(x)
T0
x
donde
a =
w
.
T0
(10.16)
La pendiente del cable dydx tan , por lo que la ecuación (10.15) puede escribirse como
dy
= as.
dx
La derivada de esta ecuación con respecto a x es
d dy
ds
a b = a .
dx dx
dx
(10.17)
Usando la relación
ds2 = dx2 + dy2,
se puede escribir la derivada de s con respecto a x como
dy 2
ds
= 1 + a b = 21 + s2,
dx
dx
B
(10.18)
donde
s =
dy
= tan u
dx
es la pendiente. Ahora, con la ecuación (10.18) se escribe la ecuación (10.17)
como
ds
21 + s2
= a dx.
La pendiente es s 0 en x 0. Integrando esta ecuación, se obtiene
s
x
ds
L0 21 + s2
=
L0
a dx,
se determina la pendiente en función de x:
s =
dy
1
= 1eax - e-ax2 = sinh
senh ax.
dx
2
(10.19)
Luego, integrando esta ecuación con respecto a x, se obtiene la curva descrita por
el cable, que se denomina catenaria:
y =
1 ax
1
1e + e-ax - 22 = 1cosh ax - 12.
a
2a
(10.20)
ws
Figura 10.17
Un cable sometido a una carga uniformemente
distribuida en toda su longitud.
520
Capítulo 10 Fuerzas y momentos internos
Tensión en el cable
Usando la ecuación (10.14) y la relación dx cos
T =
ds, se obtiene
T0
ds
= T0 .
cos u
dx
Sustituyendo la ecuación (10.18) en esta expresión y utilizando la ecuación (10.19)
se obtiene la tensión en el cable en función de x:
T = T0
A
1 +
1 ax
1e - e-ax22 = T0 cosh ax.
4
(10.21)
Longitud del cable
De la ecuación (10.15), la longitud s del cable, desde el origen hasta el punto
donde el ángulo entre el cable y el eje x es igual a , se determina mediante
s =
1
s
tan u = .
a
a
Sustituyendo la ecuación (10.19) en esta ecuación, se obtiene una expresión para
la longitud s del cable en el intervalo horizontal desde su punto más bajo hasta x:
s =
1 ax
senh ax
1e - e-ax2 =
.
a
2a
(10.22)
RESULTADOS
y
Un cable suspendido está sometido a una carga vertical
distribuida uniformemente en toda su longitud. El origen
del sistema coordenado se encuentra en el punto más
bajo del cable. La curva descrita por el cable es la catenaria.
1
1
(10.20)
y (eax eax 2) (cosh ax 1).
a
2a
El parámetro a w/T0, donde w es la magnitud de la carga distribuida y T0 es la tensión en el cable en su punto
más bajo.
T T0 1 1
s5
2a
1 ax
(e eax)2 T0 cosh ax.
4
senh ax
(eax 2 e2ax) .5
a
(10.21)
(10.22)
T
s
T0
y(x)
x
Tensión
Tensión en el cable en términos de la
tensión en el punto más bajo y de la
coordenada x respecto al punto más
bajo del cable.
Longitud
Longitud del cable medida desde el
punto más bajo x 5 0 hasta el punto
con coordenada horizontal x.
10.5 Cargas distribuidas uniformemente a lo largo de cables
Ejemplo activo 10.8
Cable cargado con su propio peso ( Relacionado con el problema 10.59)
La masa por unidad de longitud del cable mostrado es 1 kgm. La tensión en su
punto más bajo es de 50 N. Determine la altura h de sus puntos de conexión respecto
al punto más bajo.
20 m
h
Estrategia
El cable está sometido a una carga w (9.81 ms2)(1 kgm) 9.81 Nm uniformemente distribuida en toda su longitud. Como se conocen w y T0, se puede
determinar a wT0. Luego puede emplearse la ecuación (10.20) para determinar h.
Solución
a
9.81 N/m
w
0.196 m1.
50 N
T0
Determine el parámetro a.
y
(10, h) m
x
1
(cosh ax 1):
a
1
cosh[(0.196m1)(10 m)] 1
h
0.196 m1
13.4 m.
y
Aplique la ecuación
(10.20).
Problema de práctica Determine la tensión máxima en el cable.
Respuesta: 181 N.
521
522
Capítulo 10 Fuerzas y momentos internos
Problemas
10.59 La masa de la cuerda mostrada por unidad de longitud
es 0.1 kg/m. La tensión en su punto más bajo es de 4.6 N. Usando
el método descrito en el ejemplo activo 10.8, determine a) la tensión máxima en la cuerda y b) la longitud de la cuerda.
y
10.62 La masa por unidad de longitud de las líneas AB y BC
mostradas en la figura es de 2 kg/m. La tensión en el punto más
bajo de AB es 1.8 kN. Ambas líneas ejercen fuerzas horizontales
iguales en B.
a) Determine las magnitudes de h1 y h2.
b) Determine las tensiones máximas en las dos líneas.
A
B
h1
h2
C
x
12 m
Problema 10.59
60 m
40 m
Problema 10.62
10.60 La atadura en reposo del globo aerostático mostrado en la
figura es horizontal en el punto O donde ésta se encuentra conectada a la camioneta. La masa por unidad de longitud de la atadura
es 0.45 kg/m. La atadura ejerce una fuerza horizontal de 50 N
sobre la camioneta. La distancia horizontal desde el punto O hasta
el punto A donde la atadura se encuentra unida al globo es de 20
m. ¿Cuál es la altura del punto A respecto al punto O?
10.61 En el problema 10.60 determine las magnitudes de las
componentes horizontal y vertical de la fuerza ejercida en A por la
atadura sobre el globo.
10.63 La cuerda de la figura está cargada con masas de 2 kg
suspendidas a intervalos de 1 m en toda su longitud. Ignore la
masa de la cuerda. La tensión en el punto más bajo de la cuerda
es de 100 N. Determine h y la tensión máxima en la cuerda.
Estrategia: Obtenga una respuesta aproximada modelando
las cargas discretas sobre la cuerda como una carga uniformemente distribuida en toda su longitud.
10 m
h
A
O
Problemas 10.60/10.61
Problema 10.63
10.6 Cargas discretas en cables
10.6 Cargas discretas en cables
ANTECEDENTES
Las primeras aplicaciones del concepto de equilibrio en el capítulo 3 implicaron la
determinación de tensiones en cables que soportaban cuerpos suspendidos. En esta
sección se considera el caso de un número arbitrario N de cuerpos suspendidos de
un cable (figura 10.18a). Se supone que el peso del cable puede despreciarse
comparado con los pesos suspendidos, y que el cable es lo bastante flexible para
aproximar su forma con una serie de segmentos rectos.
Determinación de la configuración y las tensiones
Suponga que se conocen las distancias horizontales b1, b2, ..., bN1 y que la distancia vertical hN1 que especifica la posición de la conexión derecha del cable
también es conocida. Se tienen dos objetivos: 1) determinar la configuración
(forma) del cable calculando las distancias verticales h1, h2, ..., hN que especifican
las posiciones de los puntos de unión de los pesos, y 2) determinar las tensiones
en los segmentos 1, 2, ..., N 1 del cable.
Se comienza por dibujar un diagrama de cuerpo libre, cortando el cable en su
punto de conexión izquierdo y justo a la derecha del peso W1(figura 10.18b). Se
descompone la tensión del cable en el punto de conexión izquierdo en sus componentes horizontal y vertical, Th y Tv. Sumando momentos respecto al punto de
unión A1, se obtiene la ecuación
Mpunto A1 h1Th b1Tv 0.
b1
h1
1
(a)
bN 1
b2
h2
hN 1
hN
N1
2
W1
W2
Tv
(b) Th
WN
b1
h1
1
A1
T2
W1
Tv
Th
b1
b2
h1
1
(c)
h2
2
W1
A2
W2
T3
Figura 10.18
(a) N pesos suspendidos de un cable.
(b) Primer diagrama de cuerpo libre.
(c) Segundo diagrama de cuerpo libre.
523
524
Capítulo 10 Fuerzas y momentos internos
El siguiente paso es dibujar un diagrama de cuerpo libre cortando el cable en
su punto de conexión izquierdo y justo a la derecha del peso W2 (figura 10.18c).
Sumando momentos respecto a A2, se obtiene
L
y
L
2
Mpunto A2 h2Th (b1 b2)Tv b2W1 0.
x
w
(a)
Procediendo de esta manera, cortando el cable justo a la derecha de cada uno de los
N pesos, se obtienen N ecuaciones. También se puede dibujar un diagrama de cuerpo libre cortando el cable en sus puntos de conexión izquierdo y derecho, y sumar
momentos respecto al punto de conexión derecho. De esta manera se obtienen
N 1 ecuaciones en términos de N 2 incógnitas: las dos componentes de la
tensión Th y Tv y las posiciones verticales de los puntos de unión h1, h2, ..., hN.
Si también se especifica la posición vertical de un solo punto de unión, se puede
resolver el sistema de ecuaciones para las posiciones verticales de los otros puntos
de unión, y queda determinada la configuración del cable.
Una vez conocidas la configuración del cable y la fuerza Th, se puede determinar la tensión en cualquier segmento cortando el cable en su punto de conexión
izquierdo dentro del segmento y sumando fuerzas en dirección horizontal.
(b)
Comentarios sobre modelos continuos y discretos
(c)
Figura 10.19
(a) Cable sometido a una carga continua.
(b) Cable con tres cargas discretas.
(c) Cable con cinco cargas discretas.
Comparando cables sometidos a cargas distribuidas y discretas, se pueden hacer
algunas observaciones acerca de cómo se representan en ingeniería los sistemas
continuos y discretos. Considere un cable sometido a una carga distribuida horizontal w (figura 10.19a). La fuerza total ejercida sobre éste es wL. Como el cable
pasa por el punto x L2, y L2, mediante la ecuación (10.10) se encuentra que
a 4L, por lo que la ecuación para la curva descrita por el cable es y (2L)x2.
En la figura 10.19b, la forma del cable con la carga distribuida se compara
con la de un cable de peso insignificante sometido a tres cargas discretas W wL3
con el mismo espaciamiento horizontal (se escogieron las dimensiones del cable con
las cargas discretas de manera que las alturas de los dos cables fuesen iguales en sus
puntos medios). En la figura 10.19c, la forma del cable con la carga distribuida se
compara con la de un cable sometido a cinco cargas discretas, W wL/5, con el
mismo espaciamiento horizontal. En las figuras 10.20a y 10.20b, se compara la tensión en el cable sometido a la carga distribuida con la de los cables sometidos a tres
y a cinco cargas discretas.
La forma y la tensión en el cable con una carga distribuida se infieren de aquéllas en los cables con cargas discretas. Aunque la aproximación de la tensión es
menos precisa que la de la forma, es evidente que la primera se puede mejorar
incrementando el número de cargas discretas.
Tres cargas
discretas
2.2
1.8
1.8
T/T0
Figura 10.20
(a) Tensión en el cable con una carga
continua, comparada con la del cable
con tres cargas discretas.
(b) Tensión en el cable con una carga
continua, comparada con la del cable
con cinco cargas discretas.
Cinco cargas
discretas
2.2
Cargas
continuas
1.4
1.0
T/T0
Cargas
continuas
1.4
1.0
0
1
2x/L
(a)
0
1
2x/L
(b)
10.6 Cargas discretas en cables
Este método, en el que se aproxima una distribución continua con un modelo
discreto, es muy importante en ingeniería: es el punto de partida de los métodos
de diferencias finitas y del elemento finito. El procedimiento opuesto, en el que se
representan sistemas discretos con modelos continuos, también es muy utilizado,
por ejemplo cuándo las fuerzas ejercidas sobre un puente por el tránsito se representan como una carga distribuida.
RESULTADOS
b1
Se conocen los pesos, las distancias horizontales b1, b2,..., bN1 , y la distancia
vertical hN1. El objetivo consiste en
determinar las distancias verticales h1,
h2,..., hN y las tensiones en los segmentos del cable.
Corte el cable en su punto de conexión
izquierdo y justo a la derecha del peso W1.
Sume los momentos respecto a A1:
bN 1
b2
h1
1
h2
N1
2
W1
W2
Tv
Th
WN
b1
h1
1
A1
Mpunto A1 h1Th b1Tv 0.
T2
W1
Corte el cable en su punto de conexión izquierdo
y justo a la derecha del peso W2. Sume los
momentos respecto a A2:
Mpunto A2 h2Th (b1 b2)Tv b2W1 0.
hN 1
hN
Tv
Th
b1
b2
h1
1
h2
2
Continuando de esta manera se obtienen N ecuaciones. Además,
corte el cable en sus puntos de conexión izquierdo y derecho y sume
momentos respecto al punto de conexión derecho. Esto resulta en
N1 ecuaciones con N2 incógnitas: las dos componentes Th y Tv
de la tensión en el punto de conexión derecho y las posiciones verticales h1, h2,..., hN. Si se especifica la posición vertical de un peso,
esposible determinar la configuración geométrica del cable y las
componentes Th y Tv. Una vez que se ha hecho esto, la tensión en
cualquier segmento del cable puede obtenerse cortando el cable
en el punto de conexión izquierdo, dentro del segmento y sumando
fuerzas en la dirección horizontal.
W1
A2
W2
T3
525
526
Capítulo 10 Fuerzas y momentos internos
Ejemplo activo 10.9
Cable sometido a cargas discretas( Relacionado con el problema 10.64)
El cable de la figura soporta dos masas m1 10 kg y m2 20 kg. Determine la distancia vertical h2.
1m
1m
1m
1m
h2
1
3
2
m1
m2
Estrategia
Siguiendo el procedimiento descrito en los resultados, se pueden obtener tres ecuaciones en términos de las componentes horizontal y vertical de la tensión en el
punto de conexión derecho y la distancia vertical h2.
Solución
Tv
1m
Th
1m
A1
T2
m1g
Corte el cable en su punto de
conexión izquierdo y justo a la
derecha de la masa m1 y sume
momentos respecto a A1.
Mpunto A1 (1m)Th (1m)Tv 0.
Tv
1m
1m
Th
1m
m1g
Mpunto A2 h2Th (2m)Tv (1m)m1g 0.
h2
A2
m 2g
Corte el cable en el punto de
conexión izquierdo y justo a la
derecha de la masa m2 y sume
momentos respecto a A2 .
T3
Problemas
527
T3
Tv
1m
1m
1m
A3
Th
1m
h2
m1g
m 2g
Corte el cable en los puntos
de conexión izquierdo y derecho y sume momentos
respecto a A3.
Mpunto A3 (3 m)Tv (2 m)m1g (1 m)m2 g 0.
Se tienen tres ecuaciones en términos de las incógnitas Th, Tv y h2. Al resolverlas se
obtiene Th Tv 131 N y h2 1.25 m.
Problema de práctica Determine la tensión en el segmento 2 del cable.
Respuesta: 135 N.
Problemas
10.64 En el ejemplo activo 10.9, ¿qué valor tienen las tensiones en los segmentos 1 y 3 del cable?
10.65 Cada una de las lámparas mostradas pesa 12 lb.
a) ¿Cuál es longitud del cable ABCD necesario para suspender las
lámparas como se muestra en la figura?
b) ¿Cuál es la tensión máxima en el cable?
12
pulg
18
pulg
18
pulg
10.66 Dos pesos, W1 W2 50 lb, están suspendidos de un
cable. La distancia vertical h1 4 pies.
a) Determine la distancia vertical h2 de la figura.
b) ¿Qué valor tiene la tensión máxima en el cable?
10.67 Los pesos mostrados son W1 50 lb y W2 100 lb, y la
distancia vertical h1 4 pies.
a) Determine la distancia vertical h2.
b) ¿Qué valor tiene la tensión máxima en el cable?
6 pies
A
10 pies
3 pies
12 pulg
h1
B
h2
30 pulg
W1
W2
C
D
Problema 10.65
Problemas 10.66/10.67
2
pies
528
Capítulo 10 Fuerzas y momentos internos
10.68 Tres masas idénticas m 10 kg están suspendidas del
cable mostrado. Determine las distancias verticales h1 y h3 y trace
un bosquejo de la configuración del cable.
10.72 Cada uno de los objetos suspendidos tiene el mismo peso W.
Determine las distancias verticales h2 y h3 de la figura.
10.69 En el problema 10.68, ¿qué valor tienen las tensiones en
los segmentos 1 y 2 del cable?
4 pies
2m
h1
h3
h3
2m
1
2
3
m
h2
1m
3m
1m
14 pies
W
4
m
W
m
Problema 10.68/10.69
W
10.70 Tres pesos están suspendidos de un cable, donde m 30 kg
y la distancia vertical h1 400 mm. Determine las distancias verticales h2 y h3 de la figura.
2
pies
3
pies
4
pies
5
pies
Problema 10.72
10.71 En el problema 10.70, ¿cuál es la tensión máxima en el
cable y en qué punto ocurre?
500 mm
700 mm
300 mm 300 mm
200 mm
h1
1
h3
h2
4
2
3
m
2m
m
Problemas 10.70/10.71
10.7 Presión y centros de presión
LÍQUIDOS Y GASES
10.7 Presión y centros de presión
ANTECEDENTES
Las fuerzas del viento sobre edificios y las fuerzas aerodinámicas sobre autos y
aviones son ejemplos de fuerzas distribuidas sobre áreas. La fuerza hacia abajo
ejercida sobre la plataforma de un camión de volteo por una carga de grava está
distribuida sobre el área de su plataforma. La fuerza hacia arriba que soporta un
edificio está distribuida sobre el área de su cimentación. Las cargas distribuidas
sobre los techos de edificios por la nieve pueden ser peligrosas. Muchas fuerzas de
interés en ingeniería están distribuidas sobre áreas. En esta sección se analizará el
ejemplo más común, la fuerza ejercida por la presión de un gas o un líquido.
Una superficie inmersa en un gas o líquido está sometida a fuerzas ejercidas
por impactos moleculares. Si el gas o líquido está en reposo, la carga se puede
describir con una función p, la presión, tal que la fuerza normal ejercida sobre un
elemento diferencial dA de la superficie es p dA (figuras 10.21a y b) (observe la
analogía con una carga w distribuida a lo largo de una línea, donde la fuerza sobre
un diferencial dx de la línea es w dx).
Las dimensiones de p son (fuerza)(área). En unidades de uso común en
Estados Unidos, la presión se puede expresar en libras por pie cuadrado o libras
por pulgada cuadrada (psi). En unidades SI, la presión se expresa en newtons por
metro cuadrado, que se denominan pascales (Pa).
En algunas aplicaciones es conveniente usar la presión manométrica
pg p patm,
(10.23)
donde patm es la presión de la atmósfera. La presión atmosférica varía con el lugar
y el clima. Al nivel del mar, su valor es aproximadamente 1 105 Pa en unidades
SI y 14.7 psi o 2120 lbpie2 en unidades de uso común en Estados Unidos.
Centro de presión
Si la fuerza distribuida debida a la presión sobre una superficie se representa con
una fuerza equivalente, el punto donde su línea de acción interseca a la superficie
p
p dA
dA
(a)
Figura 10.21
(a) Presión sobre un área.
(b) La fuerza sobre un elemento dA es p dA.
(b)
529
530
Capítulo 10 Fuerzas y momentos internos
y
y
p
A
dA
p dA
y
x
x
x
(b)
(a)
y
F
xp, yp
x
(c)
Figura 10.22
(a) Un área plana sometida a presión.
(b) La fuerza sobre un elemento diferencial dA.
(c) La fuerza total actuando en el centro de presión.
se llama centro de presión. Considere un área plana A sometida a una presión p y
un sistema coordenado tal que el área esté en el plano x-y (figura 10.22a). La fuerza normal sobre cada elemento diferencial de área dA es p dA (figura 10.22b), y la
fuerza normal total sobre A es
F =
LA
p dA.
(10.24)
Ahora se determinarán las coordenadas (xp, yp) del centro de presión (figura 10.22c).
Igualando el momento de F respecto al origen con el momento total debido a la presión respecto al origen,
1xp i + yp j2 * 1- F k2 =
LA
1x i + y j2 * 1- p d A k2,
y utilizando la ecuación (10.24) se obtiene
xp =
LA
xp dA
LA
,
p dA
yp =
LA
yp dA
LA
.
(10.25)
p dA
Estas ecuaciones determinan la posición del centro de presión cuando se conoce la
presión p. Si la presión p es uniforme, la fuerza normal total es F pA y las ecuaciones (10.25) indican que el centro de presión es el centroide de A.
10.7 Presión y centros de presión
y
y
F
p
xp , yp
x
x
dV
dA
(a)
(b)
Figura 10.23
(a) Elemento diferencial dV p dA.
(b) La línea de acción de F pasa por el centroide de V.
En el capítulo 7 se demostró que si se calcula el “área” definida por una carga
distribuida a lo largo de una línea y se coloca la fuerza resultante en su centroide,
equivale a la carga distribuida. Un resultado similar es válido para una presión distribuida sobre un área plana. El término p dA de la ecuación (10.24) es igual a un
elemento diferencial dV del “volumen” entre la superficie definida por la distribución de presión y el área A (figura 10.23a). La fuerza total ejercida por la presión
es, por lo tanto, igual a este “volumen”:
F =
LV
dV = V.
Sustituyendo p dA dV en las ecuaciones (10.25), se obtiene
xp =
LV
x dV
LV
,
dV
yp =
LV
y dV
LV
.
dV
El centro de presión coincide con las coordenadas x e y del centroide del “volumen” (figura 10.23).
Presión en un líquido en reposo
Los diseñadores de recipientes y tuberías a presión, barcos, presas y otras estructuras sumergidas deben manejar fuerzas y momentos ejercidos por presión del
agua. La presión en un líquido en reposo crece con la profundidad, lo cual se puede
confirmar al nadar hasta el fondo de una alberca y notar el efecto de la presión
sobre los oídos. Si se restringe el análisis a los cambios en la profundidad para los
cuales los cambios en la densidad del líquido pueden ignorarse, es posible determinar la dependencia de la presión respecto a la profundidad usando sólo un simple
diagrama de cuerpo libre.
531
532
Capítulo 10 Fuerzas y momentos internos
A
p0
y
x
W
p
x
(a)
(b)
Figura 10.24
(a) Volumen cilíndrico que se extiende hasta una
profundidad x en un cuerpo de líquido en reposo.
(b) Diagrama de cuerpo libre del cilindro.
Introduciendo un sistema coordenado con su origen en la superficie del líquido y el eje positivo x hacia abajo (figura 10.24a), se dibuja un diagrama de cuerpo
libre de un cilindro de líquido que se extiende desde la superficie libre hasta una
profundidad x (figura 10.24b). La parte superior del cilindro está sometida a la presión en la superficie, que se llamará p0. Los lados y el fondo del cilindro están
sometidos a presión por el líquido circundante, que crece desde p0 en la superficie
hasta un valor p en la profundidad x. El volumen del cilindro es Ax, donde A es el
área de su sección transversal. Por lo tanto, su peso es W gAx, donde g es el peso
específico del líquido (recuerde que el peso específico y la densidad están relacionados por g rg). Como el líquido es estacionario, el cilindro se encuentra en
equilibrio. A partir de la ecuación de equilibrio
Fx p0A pA gAx 0,
se obtiene una expresión sencilla para la presión p del líquido en la profundidad x:
p p0 gx.
(10.26)
Así, la presión crece linealmente con la profundidad, y la derivación que se ha
usado ilustra por qué: la presión en la profundidad dada mantiene al líquido literalmente arriba de tal profundidad. Si la superficie del líquido está en contacto con
la atmósfera, p0 patm, y se puede escribir la ecuación (10.26) en términos de la
presión manométrica pg p patm como
pg gx.
(10.27)
En unidades SI, la densidad del agua al nivel del mar es r 1000 kgm3, por lo
que su peso específico es aproximadamente g rg 9.81 kNm3. En unidades
de uso común en Estados Unidos, el peso específico del agua es aproximadamente 62.4 lbpie3.
10.7 Presión y centros de presión
533
RESULTADOS
Definición de la presión
La presión p de un líquido o gas está definida tal
que la fuerza ejercida sobre un elemento de área dA de
una superficie es p dA. La fuerza y el momento
debidos a una distribución de presión pueden determinarse por integración.
La presión manométrica se define con
pg p patm,
p dA
dA
(10.23)
donde patm es la presión atmosférica. La presión atmosférica al nivel del mar es aproximadamente
1 105 Pa en unidades SI y 14.7 psi o 2120 lb/pie2
en unidades de uso común en Estados Unidos.
Centro de presión
Si la fuerza ejercida por una distribución de
presión sobre un área A se representa mediante
un vector de fuerza equivalente, el punto donde
la línea de acción del vector de fuerza interseca
A se llama el centro de presión.
Analogía del volumen
La fuerza total F ejercida sobre un área plana A
por una distribución de presión p es igual al
ìvol umen” entre A y la función p. Si F se representa mediante un vector de fuerza que actúa
en el centroide del “volumen”, el vector de
fuerza es equivalente a la distribución de presión: su línea de acción interseca a A en el
centro de presión.
y
F
xp , yp
x
p0
Presión en un líquido en reposo
La presión a una profundidad x en un líquido en
reposo es
p p0 gx,
(10.26)
donde p0 es la presión en la superficie y g rg es el
peso específico del líquido. El peso específico del
agua es 9.81 kN/m3 en unidades SI y 62.4 lb/pie3 en
unidades de uso común en Estados Unidos. Si
p0 patm, la ecuación (10.26) puede expresarse en
términos de la presión manométrica como
pg gx.
(10.27)
x
x
y
534
Capítulo 10 Fuerzas y momentos internos
Ejemplo activo 10.10
Compuerta cargada por una distribución de presión
( Relacionado con el problema 10.78)
Un cuerpo de agua en reposo ejerce presión en el lado derecho de la compuerta AB
que se muestra en la figura. El ancho de la compuerta (su dimensión perpendicular a la página) es de 3 pies y su peso es de 100 lb. El peso específico del agua es
62.4 lbpie3. Determine las reacciones sobre la compuerta en los soportes A y B.
B
3 pies
2 pies
Estrategia
Se usará integración para determinar la fuerza y el momento ejercidos sobre la
compuerta por la presión del agua. Después se puede aplicar el equilibrio al diagrama de cuerpo libre de la compuerta para determinar las reacciones en A y B.
A
Solución
La cara izquierda de la compuerta y la cara derecha
sobre el nivel del agua están expuestas a la presión
atmosférica. De las ecuaciones (10.23) y (10.26), la
presión en el agua es la suma de la presión atmosférica y la manométrica pg gx, donde x se mide
hacia abajo desde la superficie del agua. Los efectos
de la presión atmosférica sobre la compuerta se
cancelan, y se debe considerar sólo las fuerzas y
momentos ejercidos por la presión manométrica.
z
pg gx
patm
patm
x
3 pies
1 pie
y
x
2 pies
dA
dx
x
El origen del sistema coordenado se encuentra
en la superficie del agua. El elemento de área
de la compuerta dA (3 pies)dx. La fuerza
total ejercida por la presión manométrica es
2
F
A
L
pg dA L0
(gx)(3 pies)dx 374 lb.
Integre para determinar
la fuerza total ejercida
por la presión manométrica
sobre la compuerta.
10.7 Presión y centros de presión
El momento total respecto al eje y ejercido por
la presión manométrica es
2
M
L
A
xpg dA L0
x(gx)(3 pies)dx 499 pies-lb.
M 499 pies-lb
1.33 pies.
xp F
374 lb
Integre para determinar el momento total ejercido sobre la compuerta
por la presión manométrica.
Determine la posición del
centro de presión a partir de la
condición para equivalencia
M xpF.
B
1 pie
z
1.33 pies
100 lb
2 pies
374 lb
Az
Ax
x
Fx Ax 100 lb 0,
Fz Az B 374 lb 0,
Meje y (1 pie)B (2 pies)Az (1.33 pies)(374 lb) 0.
Resolviendo se obtiene Ax 100 lb, Az 291 lb, y
B 83.2 lb.
Dibuje el diagrama de cuerpo libre
de la compuerta, colocando la
fuerza total ejercida por la presión
manométrica en el centro de presión. Aplique el equilibrio para
determinar las reacciones en A y B.
Problema de práctica Determine las reacciones sobre la compuerta en los soportes
A y B; para ello use la analogía del volumen para determinar la fuerza total ejercida por
la presión manométrica sobre la compuerta y la ubicación del centro de presión.
Respuesta: Ax 100 lb, Az 291 lb, B 83.2 lb.
535
536
Capítulo 10 Fuerzas y momentos internos
Ejemplo 10.11
Fuerza de presión y centro de presión ( Relacionado con los problemas 10.79, 10.80)
Un ingeniero que realiza estudios para un diseño preliminar de la esclusa de un
canal necesita determinar la fuerza total debida a la presión sobre la placa rectangular sumergida que se muestra en la figura y la posición del centro de presión.
La parte superior de la placa está 6 m bajo la superficie. La presión atmosférica es
patm 1 105 Pa y el peso específico del agua es g 9.81 kN/m3.
6m
Estrategia
Se determinará la fuerza de presión sobre un elemento diferencial de área de la placa
representado por una franja horizontal y se integrará para determinar la fuerza total
y el momento ejercidos por la presión.
12 m
8m
Solución
En términos de un sistema coordenado con su origen en la superficie y del eje x positivo dirigido hacia abajo (figura a), la presión del agua es p patm gx. El área
de la franja horizontal es dA (8 m)dx. Por lo tanto, la fuerza total ejercida sobre
la cara de la placa por la presión es
y
6m
18
F =
x
18 m
dx
dA
8m
x
LA
p dA =
L6
1patm + gx218 m2 dx
18
18
= patm18 m2
L6
= a1 * 105
N
N
b18 m2112 m2 + a9810 3 b18 m21144 m22
2
m
m
dx + g18 m2
L6
x dx
= 20.9 * 106 N.
(a) Elemento de área en forma de franja
horizontal.
El momento respecto al eje y debido a la presión sobre la placa es
18
M =
y
LA
xp dA =
= patm18 m2
L6
x1patm + gx218 m2 dx
18
L6
18
x dx + g18 m2
L6
x2 dx
= 262 * 106 N-m.
xp
La fuerza F que actúa en el centro de presión (figura b) ejerce un momento respecto al eje y igual a M:
xpF M.
Por lo tanto, la posición del centro de presión es
x
xp =
(b) Centro de presión.
M
262 MN-m
=
= 12.5 m.
F
20.9 MN
Razonamiento crítico
Observe que el centro de presión no coincide con el centroide del área. Por lo
general, el centro de presión de un área plana coincide con el centroide del área
sólo cuando la presión está uniformemente distribuida. En este ejemplo, la presión
se incrementa con la profundidad, y como resultado, el centro de presión está
debajo del centroide.
10.7 Presión y centros de presión
Ejemplo 10.12
537
Determinación de una fuerza de presión ( Relacionado con el problema 10.91)
El recipiente de la figura está lleno con un líquido con peso específico g. Determine la fuerza ejercida por la presión del líquido sobre la pared cilíndrica AB.
b
B
R
A
Estrategia
La presión del líquido sobre la pared cilíndrica varía con la profundidad (figura a). La
fuerza ejercida por esta distribución de presión es lo que se desea determinar. Se
podría determinar integrando sobre la superficie cilíndrica pero esto se puede evitar dibujando un diagrama de cuerpo libre del cuarto de cilindro de líquido a la derecha de A.
Solución
En la figura b se dibuja el diagrama de cuerpo libre del cuarto de cilindro de líquido. La distribución de presión sobre la superficie cilíndrica del líquido es la misma
que actúa sobre la pared cilíndrica. Si se denota con Fp la fuerza ejercida sobre el
líquido mediante esta distribución de presión, la fuerza ejercida por el líquido sobre
la pared cilíndrica es Fp.
Las otras fuerzas paralelas al plano x-y que actúan sobre el cuarto de cilindro
de líquido son su peso, la presión atmosférica en la superficie y la distribución de
1
presión del líquido sobre el lado izquierdo. El volumen del líquido es 14 pR22b,
por lo que la fuerza ejercida sobre el diagrama de cuerpo libre por el peso del líquido
1
es 4 gpR2bi. La fuerza ejercida sobre la superficie superior por la presión
atmosférica es Rbpatmi.
Se puede integrar para determinar la fuerza ejercida por la presión sobre el lado
izquierdo del diagrama de cuerpo libre. Su magnitud es
R
LA
p dA =
L0
1patm + gx2b dx = Rb apatm +
B
A
(a) Diagrama de cuerpo libre del líquido a la
derecha de A.
patm
1
gRb.
2
y
De la ecuación de equilibrio
©F =
W
1
1
gpR2bi + Rbpatmi + Rb apatm + gRbj + Fp = 0,
4
2
Fp
se obtiene la fuerza ejercida por la presión del líquido sobre la pared AB:
-Fp = Rb a patm +
p
1
gRb i + Rb apatm + gRbj.
4
2
Razonamiento crítico
Con frecuencia, la necesidad de integrar sobre una superficie curva para calcular
una fuerza de presión puede evitarse al escoger un diagrama de cuerpo libre adecuado, tal como se hizo en este ejemplo.
x
(b) Diagrama de cuerpo libre del líquido a la
derecha de A.
538
Capítulo 10 Fuerzas y momentos internos
Problemas
10.73 Un ingeniero que planea un sistema de abastecimiento de
agua para una comunidad calcula que, considerando el consumo
máximo esperado, la caída de presión entre el sistema central y
el hidrante más alejado será de 25 psi. La estación de bomberos
indica que se requiere una presión manométrica de 40 psi en el
hidrante. El peso específico del agua es g 62.4 lb/pie3. ¿Qué
altura debe tener una torre de agua en el sistema central para
proporcionar la presión necesaria?
10.77 El área mostrada está sometida a una presión uniforme
patm 14.7 psi.
a) ¿Qué valor tiene la fuerza total ejercida por la presión sobre el
área?
b) ¿Qué valor tiene el momento respecto al eje y debido a la presión sobre el área?
y
10.74 Un cubo de cierto material está suspendido bajo la superficie de un líquido de peso específico g. Calcule las fuerzas ejercidas sobre las caras del cubo por la presión y demuestre que su
suma es una fuerza hacia arriba de magnitud gb3.
10 pulg
x
20 pulg
d
b
Problema 10.77
Problema 10.74
10.75 El área mostrada está sometida a una presión uniforme
patm 1 l05 Pa.
a) ¿Qué valor tiene la fuerza total ejercida por la presión sobre el
área?
b) ¿Qué valor tiene el momento respecto al eje y debido a la presión sobre el área?
10.76 El área mostrada está sometida a una presión uniforme.
Determine las coordenadas del centro de presión.
10.78 En el ejemplo activo 10.10, suponga que la profundidad
del agua respecto al punto A se aumenta de 2 pies a 3 pies. Determine las reacciones sobre la compuerta en los soportes A y B.
10.79 La parte superior de la placa rectangular mostrada está
a 2 m bajo la superficie de un lago. La presión atmosférica es
patm 1 105 Pa y el peso específico del agua es r 1000 kg/m3.
a) ¿Qué valor tiene la presión máxima ejercida sobre la placa por
el agua?
b) Determine la fuerza ejercida sobre una cara de la placa por la
presión del agua. (Vea el ejemplo 10.11.)
10.80 En el problema 10.79, ¿a qué distancia de la parte
superior de la placa se encuentra el centro de presión? (Vea el
ejemplo 10.11.)
y
2m
1m
3m
y x2
2m
x
Problemas 10.75/10.76
Problemas 10.79/10.80
Problemas
10.81 El ancho de la presa (la dimensión perpendicular a la página) es de 100 m. La densidad del agua es r 1000 kg/m3. Determine la fuerza ejercida por la presión manométrica del agua sobre
la presa
a) por integración;
b) calculando el “volumen” de la distribución de presión.
539
10.84 La compuerta homogénea mostrada pesa 100 lb y su
ancho (la dimensión perpendicular a la página) es de 3 pies. El
peso específico del agua es g 62.4 lbpie3 y la presión atmosférica es patm, 2120 lbpie2. Determine las reacciones en A y B.
B
10.82 En el problema 10.81, ¿a qué distancia de la superficie
libre del agua está el centro de presión debido a la presión manométrica del agua sobre la presa?
3 pies
30
2 pies
A
Problema 10.84
10 m
10.85 El ancho (la dimensión perpendicular a la página) de la
compuerta mostrada es de 2 m y tiene agua con profundidad d 1 m
en su lado derecho. La presión atmosférica es patm 1 105 Pa y
la densidad del agua es r 1000 kg/m3. Determine las fuerzas horizontales sobre la compuerta en A y B.
Problemas 10.81/10.82
10.83 El ancho de la compuerta (la dimensión perpendicular
a la página) de la figura es de 3 m. La presión atmosférica es
patm 1 105 Pa y la densidad del agua es r 1000 kg/m3.
Determine la fuerza horizontal y el par ejercidos sobre la
compuerta por el soporte empotrado en A.
10.86 La compuerta del problema 10.85 está diseñada para girar
y dejar salir el agua cuando la profundidad d excede cierto valor.
¿Cuál es esta profundidad?
A
500 mm
2m
B
Problemas 10.85/10.86
A
Problema 10.83
d
540
Capítulo 10 Fuerzas y momentos internos
10.87* La presa mostrada tiene agua con una profundidad de
4 pies en uno de sus lados. El ancho de la presa (la dimensión perpendicular a la página) es de 8 pies. El peso específico del agua
es g 62.4 lbpie3, y la presión atmosférica patm 2120 lbpie2. Si
se ignora el peso de la presa, ¿cuáles son las reacciones en A y B?
10.89 Considere un área A plana vertical bajo la superficie de un
líquido. Sea p0 la presión en la superficie.
a) Demuestre que la fuerza ejercida por la presión sobre el área es
F = pA, donde p = p0 + gx es la presión del líquido en el centroide del área.
b) Demuestre que la coordenada x del centro de presión es
B
xp = x +
gIy¿
pA
,
2 pies
donde Iy es el momento de inercia del área respecto al eje y que
pasa por su centroide.
y
2 pies
–x
A
2 pies
y
Problema 10.87
A
10.88* La compuerta mostrada tiene agua con profundidad de
4 pies en uno de sus lados. El ancho (la dimensión perpendicular
a la página) de la compuerta es de 8 pies. El peso específico del
agua es g 62.4 lbpie3 y la presión atmosférica es patm 2120
lbpie2. Si se ignora el peso de la compuerta, ¿qué valor tienen las
reacciones en A y B?
x
x
Problema 10.89
10.90 Una placa circular de 1 m de radio se encuentra bajo la superficie de un tanque de agua en reposo. La presión atmosférica es
patm 1 105 Pa, y la densidad del agua es r 1000 kg/m3. Determine a) la fuerza ejercida por la presión del agua sobre una cara
de la placa; y b) la coordenada x del centro de presión. (Vea el
problema 10.89).
B
2 pies
y
2 pies
1m
A
2 pies
Problema 10.88
1m
x
Problema 10.90
Problemas de repaso
10.91* El tanque mostrado consiste en un cilindro con extremos semiesféricos. Está lleno de agua (r 1000 kgm3). La
presión del agua en la parte superior del tanque es de 140 kPa.
Determine la magnitud de la fuerza ejercida por la presión del
agua sobre uno de los extremos semiesféricos del tanque. (Vea
el ejemplo 10.12).
541
10.92 Un objeto de volumen V y peso W está suspendido bajo la
superficie de un líquido en reposo de peso específico g (figura a).
Demuestre que la tensión en la cuerda es W Vg. En otras palabras, demuestre que la distribución de presión sobre la superficie
del objeto ejerce una fuerza hacia arriba igual al producto del volumen del objeto por el peso específico del agua. Este resultado se
debe a Arquímedes (287-212 A.C.).
Estrategia: Dibuje el diagrama de cuerpo libre de un volumen
de líquido con igual forma y posición (figura b).
18 m
6m
V
Problema 10.91
V
(a)
V
(b)
Problema 10.92
Problemas de repaso
10.93 Determine las fuerzas y el momento interno en el punto B
mostrado a) si x 250 mm; b) si x 750 mm.
10.95 a) Determine el momento flector máximo en la viga y el
valor de x donde ocurre.
b) Demuestre que las ecuaciones para V y M como funciones de x
satisfacen la ecuación V dMdx.
y
x
20 N-m
B
A
C
x
10.96 Dibuje los diagramas de fuerza cortante y de momento
flector para la viga del problema 10.95.
y
500 mm
360 lb/pie
1000 mm
180 lb/pie
x
Problema 10.93
3 pies
10.94 Determine las fuerzas y el momento interno a) en el punto
B y b) en el punto C.
10.97 Determine los diagramas de fuerza cortante y de momento
flector para la viga mostrada.
y
80 lb
4 pies
A
Problemas 10.95/10.96
B
C
y
D
x
6 pies
w 10(12x x2) lb/pie
3 pies
x
12 pies
Problema 10.94
12 pies
Problema 10.97
542
Capítulo 10 Fuerzas y momentos internos
10.98 Determine V y M como funciones de x para la viga ABC.
10.102 Determine las fuerzas y el momento interno en el punto
B mostrado
a) si x 250 mm;
y
b) si x 750 mm.
C
B
A
x
D
x
2m
B
A
4 kN
2m
y
1m
20 N-m
x
2m
40 N
500 mm
Problema 10.98
1000 mm
Problema 10.102
10.99 Dibuje los diagramas de fuerza cortante y de momento
flector para la viga ABC mostrada.
10.103 Dibuje los diagramas de fuerza cortante y de momento
flector de la viga mostrada.
y
D
4 pies
y
20 N-m
2 pies
C
B
A
8 pies
A
x
x
40 N
500 mm
600 lb
1000 mm
10 pies
Problema 10.103
Problema 10.99
10.100 Determine las fuerzas y el momento interno en el punto
A mostrado.
10.101 Dibuje los diagramas de fuerza cortante y de momento
flector de la viga BC mostrada.
10.104 La viga homogénea mostrada pesa 1000 lb. ¿Qué valor
tienen las fuerzas y el momento flector internos en su punto
medio?
10.105 La viga homogénea mostrada pesa 1000 lb. Dibuje los
diagramas de fuerza cortante y de momento flector
y
1m
1m
3 kN/m
y
C
B
2 pies
A
2m
1m
x
x
1m
3 pies
10 pies
1m
Problemas 10.100/10.101
Problemas 10.104/10.105
Problemas de repaso
10.106 En el punto A de la figura, el cable principal del puente
colgante es horizontal y su tensión es de 1 108 lb.
a) Determine la carga distribuida que actúa sobre el cable.
b) ¿Cuál es la tensión en B?
y
B
543
10.110* La compuerta mostrada tiene agua con 2 m de profundidad en uno de sus lados. El ancho (la dimensión perpendicular a
la página) de la compuerta es de 4 m y su masa es 160 kg. La
densidad del agua es r 1000 kgm3 y la presión atmosférica es
patm 1 105 Pa. Determine las reacciones sobre la compuerta
en A y B (el soporte en B ejerce sólo una reacción horizontal sobre
la compuerta).
300 pies
B
A
x
900 pies
2m
Problema 10.106
10.107 La línea de transmisión tiene una masa de 1.4 kgm. Si
soporta de manera segura una tensión de 5 kN, determine si soportará con seguridad una acumulación de hielo de 0.4 kgm.
12°
A
Problema 10.110
10.111 Un tanque esférico de 400 mm de radio interno está
lleno de agua (r 1000 kgm3). La presión del agua en la parte
superior del tanque es 4 105 Pa.
a) ¿Cuál es la presión del agua en el fondo del tanque?
b) ¿Qué valor tiene la fuerza total ejercida por la presión del agua
sobre la superficie interior del tanque?
40 m
Estrategia: Para el inciso b), dibuje un diagrama de cuerpo
libre de la esfera de agua dentro del tanque.
Problema 10.107
10.108 La profundidad del agua en el centro de la ventana elíptica del acuario mostrado es de 20 pies. Determine la magnitud de
la fuerza neta ejercida sobre la ventana por la presión del agua
marina (g 64 lbpie3) y la presión atmosférica del aire sobre el
lado opuesto. (Vea el problema 10.89).
10.109 La profundidad del agua en el centro de la ventana elíptica del acuario mostrado es de 20 pies. Determine la magnitud del
momento neto ejercido sobre la ventana respecto al eje horizontal
L por la presión del agua marina (g 64 lbpie3) y la presión atmosférica del aire en el lado opuesto. (Vea el problema 10.89).
3 pies 6 pulg
L
6 pies
Problemas 10.108/10.109
400 mm
Problema 10.111
CAPÍTULO
11
Trabajo virtual y energía potencial
Cuando se estira un resorte, el trabajo realizado se almacena en
el resorte como energía potencial. Al elevar una carga con una
grúa se incrementa su energía potencial gravitatoria. En este capítulo se define el trabajo y la energía potencial y se presenta un
método general, poderoso y de gran alcance llamado el principio
del trabajo virtual.
El resorte torsional almacena energía potencial que gobierna el
mecanismo de un reloj. En este capítulo se emplean los conceptos de trabajo virtual y energía potencial para analizar objetos en
equilibrio.
546
Capítulo 11 Trabajo virtual y energía potencial
11.1 Trabajo virtual
ANTECEDENTES
F
El principio del trabajo virtual es un enunciado sobre el trabajo realizado por fuerzas y pares cuando un objeto o estructura está sometido a diferentes movimientos
hipotéticos. Antes de estudiar este principio, se debe definir el concepto de trabajo.
P
Trabajo
Considere una fuerza que actúa sobre un cuerpo en un punto P (figura 11.1a).
Suponga que el objeto experimenta un movimiento infinitesimal, de modo que P
tiene un desplazamiento diferencial dr (figura 11.1b). El trabajo dU realizado por
F como resultado del desplazamiento dr se define como
(a)
F
dU = F # dr.
P
dr
(b)
F
u
dr
兩F兩 cos u
(c)
Figura 11.1
(a) Fuerza F que actúa sobre un cuerpo.
(b) Desplazamiento dr de P.
(c) Trabajo dU = 1 ƒ F ƒ cos u2 ƒ dr ƒ .
(11.1)
De la definición del producto punto, dU (兩F兩 cos u) 兩dr兩, donde u es el ángulo
entre F y dr (figura 11.1c). El trabajo es igual al producto de la componente de F en
la dirección de dr y la magnitud de dr. Observe que si la componente de F paralela a dr apunta en la dirección opuesta a dr, el trabajo es negativo. Asimismo, si
F es perpendicular a dr, el trabajo es igual a cero. Las dimensiones del trabajo son
(fuerza) (longitud).
Considere ahora un par que actúa sobre un cuerpo (figura 11.2a). El
momento debido al par es M Fh en sentido contrario al de las manecillas del
reloj. Si el objeto gira un ángulo infinitesimal da en sentido contrario al de las
manecillas del reloj (figura 11.2b), los puntos de aplicación de las fuerzas se des1
plazan distancias diferenciales 2 h da. En consecuencia, el trabajo total realizado
1
1
es dU = F12 h da2 + F12 h da2 = M da.
Se observa que cuando un objeto sobre el que actúa un par M gira un ángulo
da en el mismo sentido que el par (figura 11.2c), el trabajo resultante es
dU = M da.
(11.2)
Si el sentido del par es opuesto al sentido de da, el trabajo es negativo.
h da
2
F
F
da
h
F
F
h da
2
(a)
(b)
M
da
Figura 11.2
(a) Par que actúa sobre un objeto.
(b) Giro infinitesimal del objeto.
(c) El par M actúa sobre un objeto que gira un
ángulo da.
(c)
547
11.1 Trabajo virtual
Principio del trabajo virtual
Ahora que se ha definido el trabajo realizado por fuerzas y pares, se puede establecer el principio del trabajo virtual. Antes de hacerlo se analizará un ejemplo para
dar un contexto que facilite la comprensión del principio.
La barra homogénea de la figura 11.3a está soportada por la pared y el soporte de pasador en A, y está cargada por un par M. El diagrama de cuerpo libre de la
barra es la figura 11.3b. Las ecuaciones de equilibrio son
©Fx = Ax - N = 0,
(11.3)
©Fy = Ay - W = 0,
(11.4)
1
©Mpunto A = NL sen a - W L cos a - M = 0.
2
M
A
(a)
y
N
L
a
M
Ax
x
Ay
(b)
Figura 11.3
(a) Barra sometida a un momento M.
(b) Diagrama de cuerpo libre de la barra.
y
N
M
Ax
Ay
(11.7)
A partir de la ecuación (11.4), el trabajo virtual de nuevo es igual a cero.
Por último, se da a la barra un giro virtual manteniendo el punto A fijo (figura 11.6a). Las fuerzas Ax y Ay no trabajan porque sus puntos de aplicación no se
desplazan. El trabajo realizado por el par M es M da, porque su sentido es opuesto al del giro. En la figura 11.6b se muestran los desplazamientos de los puntos
de aplicación de las fuerzas N y W, y en la figura 11.6c aparecen las componentes de
las fuerzas en la dirección de los desplazamientos. El trabajo realizado por N es (N
1
sen a)(L da), y el trabajo realizado por W es 1- W cos a212 L da2. El trabajo
total es
W
x
dx
Figura 11.4
Desplazamiento virtual dx.
y
N
1
dU = 1N sen a21Lda2 + 1-W cos a2a Ldab - M da
2
1
= aNL sen a - W L cos a - Mbda.
2
W
(11.6)
Las fuerzas Ay y W no trabajan porque son perpendiculares a los desplazamientos
de sus puntos de aplicación. El par M tampoco trabaja porque la barra no gira.
Comparando esta ecuación con la ecuación (11.3), se encuentra que el trabajo virtual es igual a cero.
Enseguida, se da a la barra una traslación virtual en la dirección y (figura 11.5).
El trabajo virtual resultante es
dU = Aydy + 1-W2dy = 1Ay - W2dy.
a
(11.5)
Con estas tres ecuaciones se pueden encontrar las reacciones Ax, Ay y N. Sin embargo, aquí el objetivo es diferente.
Considere la siguiente pregunta: si las fuerzas y el par de la figura 11.3b
actúan sobre la barra, y ésta se somete a una traslación infinitesimal hipotética en
la dirección x, como se muestra en la figura 11.4, ¿qué trabajo se realiza? El desplazamiento hipotético dx se llama desplazamiento virtual de la barra, y el trabajo
resultante dU se llama trabajo virtual. El soporte de pasador y la pared impiden
que la barra se desplace en la dirección x: el desplazamiento virtual es un artificio
teórico. El objetivo es calcular el trabajo virtual resultante:
dU = Axdx + 1-N2dx = 1Ax - N2dx.
L
M
W
(11.8)
dy
Ax
Ay
x
De la ecuación (11.5), el trabajo virtual debido al giro virtual también es igual a
cero.
Figura 11.5
Desplazamiento virtual dy.
548
Capítulo 11 Trabajo virtual y energía potencial
y
y
y
Lda
N
N
da
M
Ax
N sen a
W cos a
1
Lda
2
da
W
x
x
(b)
Ay
a
W
x
(c)
(a)
Figura 11.6
(a) Giro virtual da.
(b) Desplazamientos de los puntos de aplicación de N y W.
(c) Componentes de N y W en la dirección de los desplazamientos.
Se mostró que para tres desplazamientos virtuales de la barra, el trabajo virtual es igual a cero. Estos resultados son ejemplos de una forma del principio del
trabajo virtual:
Si un objeto está en equilibrio, el trabajo virtual realizado por las fuerzas
y los pares externos que actúan sobre él es cero para cualquier traslación o giro virtual:
dU = 0.
(11.9)
Como lo ilustra el ejemplo presentado, este principio puede usarse para deducir las
ecuaciones de equilibrio de un objeto. Sometiendo la barra a traslaciones virtuales
dx y dy y a un giro virtual da, se obtienen las ecuaciones (11.6) a (11.8). Como el
trabajo virtual debe ser igual a cero en cada caso, se obtienen las ecuaciones (11.3)
a (11.5). Sin embargo, no se obtiene ninguna ventaja con este método en comparación con simplemente dibujar el diagrama de cuerpo libre y aplicarle las ecuaciones
de equilibrio en la forma usual. Las ventajas del principio del trabajo virtual serán
evidentes cuando se consideren estructuras.
Aplicación a estructuras
El principio del trabajo virtual enunciado en la sección anterior se aplica a cada
elemento de una estructura. Sometiendo ciertos tipos de estructuras en equilibrio a
desplazamientos virtuales y calculando el trabajo virtual total, se pueden determinar las reacciones desconocidas en sus soportes, así como las fuerzas internas en
sus elementos. El procedimiento implica encontrar un desplazamiento virtual que
resulte en trabajo virtual por parte de las cargas conocidas y por parte de fuerzas o
pares desconocidos.
Suponga que se desea determinar la carga axial en la barra BD de la armadura de la figura 11.7a. Los otros elementos de la armadura están sometidos a la carga
de 4 kN y a las fuerzas ejercidas sobre ellos por el elemento BD (figura 11.7b). Si
se da a la estructura un giro virtual da como se muestra en la figura 11.7c, el trabajo virtual es realizado por la fuerza TBD que actúa en B y por la carga de 4 kN
que actúa en C. Además, el trabajo virtual realizado por esas dos fuerzas es el trabajo virtual total efectuado sobre los elementos de la estructura, porque el trabajo
virtual realizado por las fuerzas internas entre sí se cancela. Por ejemplo, considere la junta C (figura 11.7d). La fuerza TBC es la carga axial en el elemento BC. El
trabajo virtual realizado en C sobre el elemento BC es TBC (1.4 m) da, y el trabajo
efectuado en C sobre el elemento CD es (4 kN - TBC)(1.4 m) da. Cuando se suman
el trabajo virtual realizado sobre los elementos para obtener el trabajo virtual total
11.1 Trabajo virtual
549
1m
4 kN
C
B
(1.4 m) da
1.4 m
B
(1.4 m) da
4 kN
C
u
da
TBD
D
A
(a)
TBD
4 kN
C
B
A
D
TBD
(c)
(1.4 m) da
TBD
A
C
TBC
(1.4 m) da
4 kN
TBC
C
Figura 11.7
(a) Armadura con una carga de 4 kN.
(b) Fuerzas ejercidas por la barra BD.
(c) Desplazamiento virtual de la estructura.
(d) Cálculo del trabajo virtual sobre las barras
BC y CD en la junta C.
D
(b)
(d)
sobre la estructura, el trabajo virtual debido a la fuerza interna TBC se cancela. (Si
los elementos ejercen un par interno entre sí en C —por ejemplo, como resultado
de la fricción en el soporte de pasador— el trabajo virtual no se cancelaría.). Por
lo tanto, se pueden despreciar las fuerzas internas al calcular el trabajo virtual total
sobre la estructura:
dU = 1TBD cos u211.4 m2 da + 14 kN211.4 m2 da = 0.
El ángulo u = arctan11.4>12 = 54.5°. Resolviendo esta ecuación, se obtiene
TBD = - 6.88 kN.
RESULTADOS
Trabajo
F
dr
dU Fⴢdr.
(11.1)
P
Trabajo realizado por una fuerza F como
resultado de un desplazamiento virtual dr de
su punto de aplicación.
550
Capítulo 11 Trabajo virtual y energía potencial
M
da
dU M da.
(11.2)
Trabajo hecho por un par M como resultado de
una rotación virtual da en el mismo sentido que M.
Principio del trabajo virtual
Si un objeto está en equilibrio, el trabajo virtual realizado por las fuerzas externas y pares que actúan sobre él
es igual a cero para cualquier traslación o giro virtual:
(11.9)
dU 0.
Un desplazamiento o giro virtual es un
movimiento o giro infinitesimal
hipotético.
El principio del trabajo virtual puede aplicarse a estructuras si las fuerzas y pares
que los elementos ejercen entre sí no realizan ningún trabajo neto. Este método
consta de dos pasos:
1. Escoger un desplazamiento virtual: Identifique un desplazamiento virtual de
la estructura que resulte en la realización de trabajo virtual por parte de las
cargas conocidas y de una fuerza o par desconocido que se desea determinar.
2. Determinar el trabajo virtual: Calcule el trabajo virtual total que resulta del
movimiento virtual, a fin de obtener una ecuación para la fuerza o par
desconocido.
Ejemplo activo 11.1
Aplicación del trabajo virtual a una estructura
( Relacionado con los problemas 11.12 a 11.16)
Use el principio del trabajo virtual para determinar la reacción horizontal sobre la
estructura mostrada en C.
B
1m
2m
400 N
500 N-m
40
A
40
Estrategia
Aunque la estructura esté fija en A y C, puede someterse a movimientos virtuales
hipotéticos. Se debe elegir un movimiento virtual para el cual la reacción horizontal en C y las cargas externas conocidas sobre la estructura realicen trabajo. Al calcuC lar el trabajo virtual resultante, se puede determinar la reacción horizontal en C.
Solución
B
400 N
Diagrama de cuerpo libre de la estructura. El objetivo es determinar Cx.
500 N-m
A
Ax
Ay
C
Cy
Cx
11.1 Trabajo virtual
400 sen 40 N
Escoja un movimiento virtual: Mantenga fijo el
punto A mientras el punto C experimenta un
desplazamiento virtual horizontal dx. Como
resultado, la barra AB sufre un giro virtual da en
sentido contrario al de las manecillas del reloj.
da
400 N
A
Ax
Ay
B
C
500 N-m
1m
Cy
dx
El trabajo realizado por la fuerza de 400 N es
(400 sen 40 N)(1 m)da.
La barra BC sufre un giro da en sentido contrario al de las manecillas del reloj, por lo que
el trabajo realizado por el par es (500 N-m)da.
El trabajo realizado por Cx es Cx dx. El trabajo
virtual total es
dU (400 sen 40 N)(1 m)da (500 N-m)da Cx dx 0.
Determine el trabajo virtual.
Para obtener Cx a partir de esta ecuación, se
debe determinar la relación entre da y dx.
A partir de la geometría de la estructura.
x 2 (2cos a).
La derivada de esta ecuación con respecto a a es
dx
4sen a,
da
entonces un cambio infinitesimal en x está relacionado con un cambio infinitesimal en a por
medio de
dx 4sen ada.
Como el giro virtual en el sentido de las
manecillas del reloj da es una disminución
de a, dx está relacionado con da por
Obtenga la relación
entre da y dx.
dx 4sen 40 da.
Sustituyendo esta expresión en la ecuación
para el trabajo virtual total resulta
dU 冤(400sen 40 N)(1 m) (500 N-m)
(4sen 40 m)Cx 冥da 0.
Resolviendo se obtiene Cx 294 N.
Problema de práctica Use el principio de trabajo virtual para determinar la reacción
vertical en C. Hágalo manteniendo fijo el punto A y sometiendo a toda la estructura a
un giro virtual rígido da en el sentido de las manecillas del reloj.
Respuesta: Cy = - 79.3 N.
Cx
551
552
Capítulo 11 Trabajo virtual y energía potencial
Ejemplo 11.2
Aplicación del trabajo virtual a una máquina ( Relacionado con el problema 11.21)
La plataforma extensible mostrada sube y baja por medio del cilindro hidráulico
BC. El peso total de la plataforma y las personas es W. Los pesos de las vigas que
soportan la plataforma pueden ignorarse. ¿Qué fuerza axial debe ejercer el cilindro
hidráulico para mantener en equilibrio la plataforma en la posición mostrada?
Estrategia
Se puede usar un desplazamiento virtual que coincida con el desplazamiento real de
la plataforma y las vigas cuando cambia la longitud del cilindro hidráulico. Calculando el trabajo virtual, realizado por el cilindro hidráulico y por el peso de las personas y la plataforma, se puede determinar la fuerza ejercida por el cilindro
hidráulico.
Solución
Selección de un desplazamiento virtual
En la figura a se dibuja el diagrama de cuerpo libre de la plataforma y las vigas. El
objetivo es determinar la fuerza F ejercida por el cilindro hidráulico. Si se mantiene fijo el punto A y se somete el punto C a un desplazamiento virtual dx, las únicas
fuerzas externas que realizan trabajo virtual son F y el peso W. (La reacción debida
al soporte de rodillos en C es perpendicular al desplazamiento virtual).
W
Ax
F
Ay
h
A
C
B
b
C
(a) Diagrama de cuerpo libre de la
plataforma y las vigas de soporte.
553
Problemas
Determinación del trabajo virtual El trabajo virtual realizado por la fuerza F
cuando el punto C experimenta un desplazamiento virtual dx hacia la derecha (figura b) es F dx. Para determinar el trabajo virtual que realiza el peso W, es necesario determinar los desplazamientos verticales del punto D en la figura b cuando el
punto C se mueve una distancia dx hacia la derecha. Las dimensiones de b y h están
relacionadas por
D
h
b2 + h2 = L2,
donde L es la longitud de la viga AD. Derivando esta ecuación con respecto a b, se
obtiene
A
C
F
b
dh
2b + 2h
= 0,
db
dx
(b) Desplazamiento virtual en el que A
permanece fijo y C se mueve
horizontalmente.
que puede resolverse para dh en términos de db:
b
dh = - db.
h
Así, cuando b crece una cantidad dx, la dimensión h decrece una cantidad (b兾h) dx.
Como hay tres pares de vigas, la plataforma se desplaza hacia abajo una distancia (3b兾h) dx, y el trabajo virtual realizado por el peso es (3b兾h)W dx. El trabajo
virtual total es
dU = c -F + a
y se obtiene F = 13b>h2W.
3b
bW ddx = 0,
h
Razonamiento crítico
Se diseñó este ejemplo para demostrar qué tan ventajoso puede ser el método del
trabajo virtual para cierto tipo de problemas. Se puede ver que sería muy tedioso
dibujar los diagramas de cuerpo libre de los elementos individuales del bastidor
que soporta a la plataforma y resolver las ecuaciones de equilibrio para determinar
la fuerza ejercida por el cilindro hidráulico. En contraste, fue relativamente simple
determinar el trabajo virtual realizado por las fuerzas externas que actúan sobre el
bastidor.
Problemas
Los siguientes problemas deben resolverse usando
el principio del trabajo virtual.
11.2 a) Determine el trabajo virtual realizado por la fuerza de 2 kN
y el par de 2.4 kN-m cuando la viga se gira un ángulo du ( respecto al
11.1 Determine las reacciones en A.
punto A en sentido contrario al de las manecillas del reloj.
Estrategia: Someta la viga a tres movimientos virtuales: 1. un
desplazamiento horizontal dx; 2. un desplazamiento vertical dy, y
3. un giro du respecto a A.
b) Use el resultado de a) para determinar la reacción en B.
2 kN
y
2.4 kN-m
300 N
800 N-m
A
A
x
2m
2m
400 mm
800 mm
400 mm
Problema 11.2
Problema 11.1
B
30
554
Capítulo 11 Trabajo virtual y energía potencial
11.3 Determine la tensión en el cable mostrado.
11.7 El mecanismo mostrado está en equilibrio. Determine la
fuerza R en términos de F.
F
F
B
60
D
60
200 N
A
R
0.8 m
60
1.6 m
60
A
C
Problema 11.3
Problema 11.7
11.4 La barra en L mostrada está en equilibrio. Determine F.
F
11.8 Determine la reacción en el soporte de rodillos mostrado en
la figura.
200 N
600 mm
F
A
60 N
1m
100 N-m
1.5 m
E
B
500 mm
500 mm
1.5 m
Problema 11.4
1m
C
11.5 La dimensión L 4 pies y w0 300 lbⲐpie. Determine las
reacciones en A y B.
Estrategia: Para determinar el trabajo virtual realizado por la
carga distribuida, represéntela mediante una fuerza equivalente.
w0
D
1.5 m
Problema 11.8
11.9 Determine el par M necesario para que el mecanismo mostrado esté en equilibrio.
0.5 m
A
B
L/2
L/2
0.3 m
Problema 11.5
11.6 Determine las reacciones en A y B.
0.4 m
0.9 m
y
M
300 lb/pie
600 lb
100 lb/pie
x
B
A
3 pies
3 pies
Problema 11.6
2 pies
600 N/m
Problema 11.9
Problemas
11.10 El sistema mostrado está en equilibrio. La masa total de la
carga suspendida y el dispositivo A es de 120 kg.
a) Usando la condición de equilibrio, determine la fuerza F.
b) Usando el resultado del inciso (a) y el principio del trabajo
virtual, determine la distancia que la carga suspendida se eleva si
el cable es jalado hacia arriba 300 mm en B.
555
11.12* En la figura, demuestre que dx está relacionada con d
por medio de
dx (L1 tan b) d.
(Vea el ejemplo activo 11.1).
L1
b
L2
F
B
da
A
dx
Problema 11.12
Problema 11.10
11.11 Determine la fuerza P necesaria para que el mecanismo de
la figura esté en equilibrio.
11.13 La superficie horizontal de la figura es lisa. Determine
la fuerza horizontal F necesaria para que el sistema esté en equilibrio. (Vea el ejemplo activo 11.1).
9 pulg
P
200 mm
6 pulg
400 mm
400 pulg-lb
50
400 mm
F
F
M
600 mm
400 mm
400 mm
400 mm
Problema 11.11
Problema 11.13
556
Capítulo 11 Trabajo virtual y energía potencial
11.14* En la figura, demuestre que dx está relacionada con d
por medio de
dx =
L1x sen a
da.
x - L1 cos a
11.17 La barra AC está conectada a la barra BD mediante un
pasador que se ajusta a una ranura vertical lisa como se muestra en la figura. Las masas de las barras son despreciables. Si
MA 30 N-m, ¿cuál es el par MB necesario para que el sistema
esté en equilibrio?
Estrategia: Escriba la ley de los cosenos en función de a y
derive la ecuación resultante con respecto a a. (Vea el ejemplo
activo 11.1).
D
C
L2
L1
a
0.4 m
MB
A
x
B
MA
0.7 m
da
Problema 11.17
11.18 El ángulo a 20° y la fuerza ejercida sobre el pistón en
reposo por la presión es de 4 kN hacia la izquierda. ¿Qué par M es
necesario para mantener el sistema en equilibrio?
dx
Problema 11.14
240
mm
130
mm
11.15 El mecanismo mostrado está en equilibrio. ¿Qué valor
tiene la fuerza F? (Vea el ejemplo activo 11.1).
a
F
M
Problema 11.18
200 mm
2 kN
200 mm
400 mm
11.19 La estructura de la figura está sometida a una carga de
400 N y se mantiene en posición mediante un cable horizontal.
Determine la tensión en el cable.
400 N
Problema 11.15
11.16 El mecanismo mostrado está en equilibrio. ¿Qué valor
tiene la fuerza F? (Vea el ejemplo activo 11.1).
400 lb
2m
60
60
F
3 pies
Problema 11.19
4
pies
6
pies
4
pies
Problema 11.16
8
pies
2m
Problemas
11.20 Si la carga sobre el gato de la figura es L 6.5 kN, ¿cuál
es la tensión en el tornillo roscado entre A y B?
557
11.23 Determine la fuerza P necesaria para que el mecanismo
mostrado esté en equilibrio.
L
P
F
65 mm
B
A
600 mm
65 mm
F
120
mm
600 mm
Problema 11.20
800 mm
11.21 Determine las reacciones en los puntos A y B mostrados.
(Use las ecuaciones de equilibrio para determinar las componentes
horizontales de las reacciones y utilice el procedimiento descrito
en el ejemplo 11.2 para determinar las componentes verticales).
400 mm
400 mm
Problema 11.23
11.24 El collarín A se desliza sobre la barra vertical lisa que se
muestra en la figura. Las masas son mA 20 kg y mB 10 kg.
A
a) Si al collarín A se le da un desplazamiento virtual hacia arriba
dy, ¿cuál el desplazamiento resultante hacia debajo de la masa B?
b) Use el principio del trabajo virtual para determinar la tensión
en el resorte.
60
300 lb
0.25 m
60
B
0.2 m
6
pulg
12
pulg
A
Problema 11.21
B
11.22 El mecanismo mostrado eleva una carga W extendiendo el
actuador hidráulico DE. Las barras AD y BC tienen cada una 2 m
de longitud. Las distancias son b 1.4 m y h 0.8 m. Si W 4
kN, ¿qué fuerza debe ejercer el actuador para mantener la carga en
equilibrio?
b
Problema 11.24
W
A
B
h
C
D
Problema 11.22
E
558
Capítulo 11 Trabajo virtual y energía potencial
11.2 Energía potencial
ANTECEDENTES
El trabajo de una fuerza F debida a un desplazamiento diferencial de su punto de
aplicación es
dU = F # dr.
Si existe una función V de posición tal que para cualquier dr,
dU = F # dr = - dV,
(11.10)
la función V se llama energía potencial asociada con la fuerza F, y se dice que F
es conservativa. (El signo negativo en esta ecuación es consistente con la interpretación de V como energía “potencial”: Una disminución de V origina un trabajo positivo). Si las fuerzas que trabajan sobre un sistema son conservativas, se
puede usar la energía potencial total del sistema para determinar sus posiciones de
equilibrio.
Ejemplos de fuerzas conservativas
Los pesos de los objetos y las fuerzas ejercidas por resortes lineales son conservativos. En las secciones siguientes se deducen las energías potenciales asociadas
con esas fuerzas.
Peso En términos de un sistema coordenado con su eje y dirigido hacia arriba,
la fuerza ejercida por el peso de un cuerpo es F Wj (figura 11.8a). Si se le da
al cuerpo un desplazamiento arbitrario dr dxi dyj dzk (figura 11.8b), el trabajo realizado por su peso es
dU = F # dr = 1- Wj2 # 1dxi + dyj + dzk2 = - W dy.
y
Se busca una energía potencial V tal que
dU = - W dy = - dV
(11.11)
o bien
Wj
x
dV
= W.
dy
Si se desprecia la variación que se da en el peso con la altura y se integra, resulta
z
(a)
V Wy C.
y
La constante C es arbitraria. Como esta función satisface la ecuación (11.11) para
cualquier valor de C, se hará C 0. La posición del origen del sistema coordenado también se puede escoger arbitrariamente. Así, la energía potencial asociada
con el peso de un cuerpo es
dr
V Wy,
(11.12)
donde y es la altura del objeto sobre algún nivel de referencia o datum.
Wj
x
z
(b)
Figura 11.8
(a) Fuerza ejercida por el peso de un cuerpo.
(b) Desplazamiento diferencial.
Resortes Considere un resorte lineal que conecta un cuerpo a un soporte fijo
(figura 11.9a). En términos del alargamiento S r – r0, donde r es la longitud del
resorte y r0 es su longitud sin estirar, la fuerza ejercida sobre el cuerpo es kS (figura 11.9b). Si el punto en el cual el resorte está unido al cuerpo experimenta un
desplazamiento diferencial dr (figura 11.9c), el trabajo realizado por la fuerza
sobre el objeto es
dU kS dS,
11.2 Energía potencial
k
kS
(a)
(b)
dr
dS
dr
(c)
Figura 11.9
(a) Resorte conectado a un objeto.
(b) Fuerza ejercida sobre el objeto.
(c) Desplazamiento diferencial del objeto.
(d) El trabajo realizado por la fuerza es
dU kS dS.
kS
(d)
donde dS es el incremento en el alargamiento del resorte que resulta del desplazamiento (figura 11.9d). Se busca una energía potencial V tal que
dU kS dS dV.
(11.13)
o bien
dV
= kS.
dS
Integrando esta ecuación e igualando a cero la constante de integración, se obtiene la energía potencial asociada con la fuerza ejercida por un resorte lineal:
V =
559
1 2
kS .
2
(11.14)
Observe que V es positiva si el resorte está estirado (S es positiva) o comprimido
(S es negativa). La energía potencial (potencial de realizar trabajo) se almacena en
un resorte al estirarlo o comprimirlo.
Principio del trabajo virtual para fuerzas conservativas
Como el trabajo realizado por una fuerza conservativa se expresa en términos de
su energía potencial a través de la ecuación (11.10), se puede dar un enunciado
alternativo del principio del trabajo virtual cuando un objeto se somete a fuerzas
conservativas:
Suponga que un cuerpo está en equilibrio. Si las fuerzas y pares que
realizan trabajo como resultado de una traslación o giro virtual son
conservativas, el cambio en la energía potencial total es igual a cero:
dV 0.
(11.15)
Es necesario enfatizar que no es necesario que todas las fuerzas actuando sobre el
objeto sean conservativas para que este resultado sea válido; sólo deben serlo las
fuerzas que realizan trabajo. Este principio también se aplica a un sistema de objetos interconectados si las fuerzas externas que realizan trabajo son conservativas
y las fuerzas internas en las conexiones entre los cuerpos no trabajan o bien son conservativas. Tal sistema se denomina sistema conservativo.
560
Capítulo 11 Trabajo virtual y energía potencial
Si la posición de un sistema se puede especificar con una sola coordenada u,
se dice que el sistema tiene un grado de libertad. La energía potencial total de
un sistema conservativo de un grado de libertad se puede expresar en términos
de u, y es posible escribir la ecuación (11.15) como
dV =
dV
dq = 0.
dq
Así, cuando el cuerpo o sistema está en equilibrio, la derivada de su energía potencial total con respecto a u es igual a cero:
dV
= 0.
dq
(11.16)
Esta ecuación puede utilizarse para determinar los valores de u para los cuales el
sistema está en equilibrio.
Estabilidad del equilibrio
Suponga que una barra homogénea de peso W y longitud L está articulada en un
extremo. En términos del ángulo a de la figura 11.10a, la altura del centro de masa
1
relativa al extremo articulado es - 2 L cos a. Por lo tanto, escogiendo como referencia el nivel de la articulación, se puede expresar la energía potencial asociada
con el peso de la barra como
1
V = - WL cos a.
2
Cuando la barra está en equilibrio,
dV
1
sen aa = WL sin
= 0.
0.
da
2
Esta condición se satisface cuando a 0 (figura 11.10b) y también cuando a 180°
(figura 11.10c).
Hay una diferencia fundamental entre las dos posiciones de equilibrio de la
barra. En la posición mostrada en la figura 11.10b, si se desplaza la barra ligeramente de su posición de equilibrio y se suelta, permanecerá cerca de la posición de
equilibrio. Se dice entonces que esta posición de equilibrio es estable. Cuando la
barra está en la posición mostrada en la figura 11.10c, si se desplaza ligeramente
y se suelta, se alejará de la posición de equilibrio. Esta posición de equilibrio es
inestable.
a 180
Nivel de
referencia
Figura 11.10
(a) Barra suspendida de un extremo.
(b) Posición de equilibrio a 0.
(c) Posición de equilibrio a 180°.
a0
a
(a)
(b)
(c)
561
11.2 Energía potencial
En la figura 11.11a se muestra la gráfica de la energía potencial V de la barra
en función de a. La energía potencial es un mínimo en la posición de equilibrio
estable, a 0, y un máximo en la posición de equilibrio inestable, a 180°. La
derivada de V (figura 11.11b) es igual a cero en ambas posiciones de equilibrio.
La segunda derivada de V (figura 11.11c) es positiva en la posición de equilibrio estable, a 0, y negativa en la posición de equilibrio inestable, a 180°.
Si un sistema conservativo de un grado de libertad está en equilibrio y la
segunda derivada de V evaluada en la posición de equilibrio es positiva, el equilibrio es estable. Si la segunda derivada de V es negativa, el equilibrio es inestable
(figura 11.12).
Equilibrio
inestable
V
(a)
Equilibrio
estable
dV
da
(b)
dV
7 0:
dq2
dV
= 0,
dq
d2V
6 0:
dq2
a
Equilibrio estable
d 2V
da 2
Equilibrio inestable
La demostración de estos resultados requiere un análisis del movimiento del sistema cerca de una posición de equilibrio.
Por lo general, el uso de la energía potencial para analizar el equilibrio de sistemas con un grado de libertad, implica la realización de llevar a cabo tres pasos:
1. Determinar la energía potencial: Exprese la energía potencial total en términos de una sola coordenada que especifique la posición del sistema.
2. Encontrar las posiciones de equilibrio: Calcule la primera derivada de la energía potencial para determinar la posición o las posiciones de equilibrio.
3. Examinar la estabilidad: Use el signo de la segunda derivada de la energía
potencial para determinar si las posiciones de equilibrio son estables.
V
Equilibrio
estable
Equilibrio
p
Equilibrio
2
dV
= 0,
dq
a
p
Equilibrio
inestable
q
Figura 11.12
Gráficas de la energía potencial V en función de la
coordenada u que muestran posiciones de equilibrio
estable e inestable.
RESULTADOS
Energía potencial
Si existe una función de posición V tal que para cualquier desplazamiento infinitesimal dr el trabajo realizado por una fuerza F es
dU = F # dr = - dV,
entonces V se denomina la energía potencial asociada con la fuerza F y se dice
que es conservativa.
(c)
Estable
a
p
Inestable
Figura 11.11
Gráficas de V, dVⲐda, y d2VⲐda2.
562
Capítulo 11 Trabajo virtual y energía potencial
y
Wj
x
z
V Wy.
(11.12)
Energía potencial asociada con el peso de un
objeto. La coordenada y es la altura del centro
de masa sobre un punto de referencia arbitrario
o datum.
k
V
1 2
kS .
2
(11.14)
Energía potencial asociada con un resorte,
donde S es el alargamiento, la longitud
del resorte respecto a su longitud sin carga.
Principio del trabajo virtual para fuerzas conservativas
Considere un objeto que está en equilibrio. Si las fuerzas y
pares que realizan trabajo sobre el objeto como resultado de
una traslación o rotación virtual son conservativos, el cambio
en la energía potencial total es igual a cero:
dV 0.
(11.15)
Este principio también se aplica a un sistema de objetos interconectados si las fuerzas externas que realizan trabajo son conservativas y las fuerzas internas entre los
objetos no efectúan trabajo o son conservativas. Un sistema de este tipo se llama
sistema conservativo.
Si la posición de un sistema puede especificarse mediante una sola
coordenada q, se dice el sistema tiene un grado de libertad. Cuando un
sistema conservativo de un grado de libertad se encuentra en equilibrio,
dV
0.
dq
(11.16)
Si la segunda derivada de V con respecto a q es positiva, la posición de
equilibrio es estable; si es negativa, la posición de equilibrio es inestable.
11.2 Energía potencial
Ejemplo activo 11.3
Estabilidad de un sistema conservativo ( Relacionado con los problemas 11.27 a 11.29)
En la figura se muestra una caja de peso W, la cual está suspendida del techo mediante un resorte. La coordenada x mide la posición del centro de masa de la caja
con respecto a la posición en que el resorte no está estirado. Determine la posición
de equilibrio de la caja respecto a su posición cuando el resorte está sin estirar.
k
x
Estrategia
Las fuerzas que actúan sobre la caja —su peso y la fuerza ejercida por el resorte—
son conservativas. Se puede expresar la energía potencial total en términos de la
coordenada x y usar la ecuación (11.16) para determinar la posición de equilibrio.
Solución
Sea x 0 el nivel de referencia.
Como x es positiva hacia abajo, la
energía potencial es Wx.
Energía potencial asociada con
el peso.
El alargamiento del resorte es igual
a x, por lo que la energía potencial es
1 2
kx .
2
Energía potencial asociada con
el resorte.
La energía potencial total es
1 2
kx Wx.
2
Cuando la caja está en equilibrio,
dV
kx W 0.
dx
La posición de equilibrio es
W
x .
k
V
Aplique la ecuación (11.16).
Problema de práctica Determine si la posición de equilibrio de la caja es estable.
Respuesta: Sí.
563
564
Capítulo 11 Trabajo virtual y energía potencial
Ejemplo 11.4
Estabilidad de una posición de equilibrio ( Relacionado con los problemas 11.31, 11.32)
Una semiesfera homogénea está en reposo sobre una superficie plana. Demuestre
que, en la posición mostrada, la semiesfera se encuentra en equilibrio. ¿Es estable
la posición de equilibrio?
R
Estrategia
Para determinar si la semiesfera está en equilibrio y para ver si este equilibrio es
estable, se debe introducir una coordenada que especifique su orientación y exprese
su energía potencial en términos de esa coordenada. Se puede usar como coordenada
el ángulo de giro de la semiesfera respecto a la posición mostrada.
Solución
Determinación de la energía potencial Suponga que la semiesfera ha girado un
ángulo a con respecto a su posición original (figura a). Así, a partir del nivel de referencia mostrado, la energía potencial asociada con el peso W de la semiesfera es
3
V = - RW cos a.
8
a
Nivel de
referencia
3
R
8
(a) Semiesfera girada un ángulo a.
Localización de las posiciones de equilibrio
equilibrio,
Cuando la semiesfera está en
dV
3
= RW sen a = 0,
da
8
lo cual confirma que a 0 es una posición de equilibrio.
Examen de la estabilidad
La segunda derivada de la energía potencial es
d2V
3
= RW cos a.
2
8
da
Esta expresión es positiva en a 0, por lo que la posición de equilibrio es estable.
Razonamiento crítico
Observe que se despreció la fuerza normal ejercida por la superficie plana sobre la
semiesfera. Esta fuerza no trabaja y por ello no afecta a la energía potencial.
11.2 Energía potencialy
Ejemplo 11.5
565
Estabilidad de una posición de equilibrio ( Relacionado con los problemas 11.41, 11.42)
Las barras articuladas se mantienen en posición mediante el resorte lineal mostrado.
Cada barra tiene peso W y longitud L. El resorte no está estirado cuando a 0, y
las barras están en equilibrio cuando a 60°. Determine la constante de resorte k
y determine si la posición de equilibrio es estable o inestable.
B
A
k
a a
L
Estrategia
Las únicas fuerzas que realizan trabajo sobre las barras son sus pesos y la fuerza ejercida por el resorte. Expresando la energía potencial total en función de a y usando la
ecuación (11.16), se obtendrá una ecuación de la que es posible despejar la constante k.
Solución
Determinación de la energía potencial Si se utiliza el nivel de referencia mostrado en la figura a, la energía potencial asociada con los pesos de las dos barras es
1
1
W a - L sen ab + W a - L sen ab = - WL sen a.
2
2
Nivel de
referencia
1
L sen a
2
2L cos a
A
B
a
k
a
L
El resorte no está estirado cuando a 0 y la distancia entre los puntos A y B es 2L
cos a (figura a), por lo que el alargamiento del resorte es 2L 2L cos a. Así, la
1
energía potencial asociada con el resorte es 2 k12L - 2L cos a22, y la energía
potencial total es
V WL sen a 2kL2(1 – cos a)2.
Cuando el sistema está en equilibrio,
dV
= - WL cos a + 4kL2 1sen a211 - cos a2 = 0.
da
Como el sistema está en equilibrio cuando a 60°, es posible despejar de esta
ecuación la constante de resorte en función de W y L:
k =
W cos a
W cos 60°
0.289W
=
=
4L 1sen a211 - cos a2
4L 1sen 60°211 - cos 60°2
L
Análisis de la estabilidad
La segunda derivada de la energía potencial es
d2V
= WL sen a + 4kL2 1cos a - cos2 a + sen 2 a2
da2
WL sen 60° 4kL2(cos 60° cos2 60° sen2 60°)
= 0.866WL + 4kL2.
Éste es un número positivo, por lo que la posición de equilibrio es estable.
Razonamiento crítico
¿Cómo se sabe cuándo aplicar a un sistema el principio de trabajo virtual para fuerzas conservativas? El sistema debe ser conservativo, lo que significa que son conservativos las fuerzas y pares que realizan trabajo cuando el sistema experimenta un
movimiento virtual. Las fuerzas conservativas son fuerzas para las cuales existe una
energía potencial. En este ejemplo, el trabajo es realizado por los pesos de las barras
y la fuerza ejercida por el resorte, que son fuerzas conservativas.
(a) Determinación de la energía potencial total.
566
Capítulo 11 Trabajo virtual y energía potencial
Problemas
11.25 La energía potencial de un sistema conservativo está dada
por V 2x3 3x2 l2x.
a) ¿Para qué valores de x el sistema está en equilibrio?
b) Determine si las posiciones de equilibrio obtenidas en el inciso a) son estables o inestables.
11.26 La energía potencial de un sistema conservativo está dada
por V 2q3 21q2 72q.
a) ¿Para qué valores de u el sistema está en equilibrio?
b) Determine si las posiciones de equilibrio obtenidas en el inciso a) son estables o inestables.
11.29 La masa de 1 kg de la figura está suspendida del resorte no lineal descrito en el problema 11.28. Las constantes
k 10 y e 1, donde x está en metros.
a) Demuestre que la masa está en equilibrio cuando x 1.12 m y
cuando x 2.45 m.
b) Determine si las posiciones de equilibrio son estables o
inestables. (Vea el ejemplo 11.3).
11.27 En la figura, la masa m 2 kg y la constante del resorte
k 100 N/m. El resorte no está estirado cuando x 0.
a) Determine el valor de x para el cual la masa está en
equilibrio.
b) Determine si la posición de equilibrio es estable o inestable.
(Vea el ejemplo 11.3).
x
Problema 11.29
11.30 Cada uno de los dos segmentos rectos de la barra
mostrada tiene peso W y longitud L. Determine si la posición
de equilibrio mostrada es estable cuando: a) 0 a0 90°; b)
90° a0 180°.
k
m
x
a0
a0
Problema 11.27
Problema 11.30
11.28 El resorte no lineal mostrado ejerce una fuerza kx ex3
sobre la masa, donde k y e son constantes. Determine la energía
potencial V asociada con la fuerza ejercida por el resorte sobre la
masa. (Vea el ejemplo 11.3).
11.31 El objeto compuesto homogéneo consiste en una semiesfera y un cilindro, y descansa sobre una superficie plana. Demuestre
que esta posición de equilibrio es estable sólo si L 6 R> 22.
(Vea el ejemplo 11.4).
x
L
R
Problema 11.28
Problema 11.31
Problemas
11.32 El objeto compuesto homogéneo consiste en un medio
cilindro y un prisma triangular sobre una superficie plana. Demuestre que esta posición de equilibrio es estable sólo si h 6 22 R.
(Vea el ejemplo 11.4).
h
11.35 La barra AB mostrada tiene masa m y longitud L. El resorte no está estirado cuando la barra se encuentra en posición
vertical (a 0). El collarín ligero C resbala sobre la barra lisa vertical por lo que el resorte permanece horizontal. Demuestre que
la posición de equilibrio a 0 es estable sólo si 2kL mg.
11.36 La barra AB del problema 11.35 tiene una masa m 4 kg,
su longitud es de 2 m, y la constante del resorte k 12 NⲐm.
a) Determine el valor de a en el intervalo 0 a 90° para el
cual la barra está en equilibrio.
b) Determine si la posición de equilibrio encontrada en el inciso
a) es estable.
R
Problema 11.32
k
C
11.33 La barra homogénea mostrada tiene peso W, y el resorte
no está estirado cuando la barra se encuentra en posición vertical
(a 0).
a) Utilice la energía potencial para demostrar que la barra está en
equilibrio cuando a 0.
b) Demuestre que el equilibrio a 0 es estable sólo si 2kL W.
11.34 Suponga que la barra del problema 11.33 está en equilibrio cuando a 20°.
a) Demuestre que la constante del resorte k 0.490 WⲐL.
b) Determine si la posición de equilibrio es estable.
k
a
L
Problemas 11.33/11.34
567
B
a
A
Problemas 11.35/11.36
568
Capítulo 11 Trabajo virtual y energía potencial
11.37 La barra AB mostrada tiene peso W y longitud L. El resorte no está estirado cuando la barra se encuentra en posición
vertical (a 0). El collarín C se desliza sobre la barra lisa horizontal, por lo que el resorte permanece vertical. Demuestre que
la posición de equilibrio a 0 es inestable.
11.38 La barra AB descrita en el problema 11.37 tiene una masa
de 2 kg y la constante de resorte k 80 NⲐm.
a) Determine el valor de a en el intervalo 0 a 90° para el
cual la barra está en equilibrio.
b) Determine si la posición de equilibrio encontrada en el inciso
a) es estable.
C
11.41 Las barras articuladas de la figura se mantienen en
posición mediante el resorte lineal. Cada barra tiene peso W y
longitud L. El resorte no está estirado cuando a 90°. Determine el valor de a en el intervalo 0 a 90° para el cual el
sistema está en equilibrio. (Vea el ejemplo 11.5).
11.42 Determine si la posición de equilibrio encontrada en el
problema 11.41 es estable o inestable. (Vea el ejemplo 11.5).
L
k
a a
k
Problemas 11.41/11.42
B
11.43 La barra mostrada pesa 15 lb. El resorte no está estirado
cuando a 0. La barra está en equilibrio cuando a 30°. Determine la constante k del resorte.
a
1m
11.44 Determine si las posiciones de equilibrio de la barra del
problema 11.43 son estables o inestables.
A
Problemas 11.37/11.38
11.39 Cada una de las barras homogéneas mostradas tienen
masa m y longitud L. El resorte no está estirado cuando a 0.
Si mg kL, determine el valor de a en el intervalo 0 a 90°
para el cual el sistema está en equilibrio.
k
11.40 Determine si la posición de equilibrio encontrada en el
problema 11.39 es estable o inestable.
4 pies
a
k
2 pies
a
Problemas 11.43/11.44
a
Problemas 11.39/11.40
Problemas de repaso
569
Problemas de repaso
11.45 a) Determine el par ejercido sobre la viga en A.
11.48 Suponga se debe calcular la fuerza ejercida sobre el
perno por las tenazas cuando los mangos de sujeción están sometidos a fuerzas F como se muestra en la figura a, se podrían
medir cuidadosamente las dimensiones, dibujar los diagramas
de cuerpo libre y usar las ecuaciones de equilibrio. Pero existe
otro procedimiento que consiste en medir el cambio en la distancia entre las mordazas cuando la distancia entre los mangos
cambia un poco. Si las mediciones indican que la distancia d
de la figura b disminuye 1 mm cuando D se reduce 8 mm,
¿cuál es el valor aproximado de la fuerza ejercida sobre el
perno por cada mordaza al aplicar las fuerzas F?
b) Determine la fuerza vertical ejercida sobre la viga en A.
100 N
200 N-m
A
30
2m
Problema 11.45
11.46 La estructura mostrada está sometida a un par de 20 kN-m.
Determine la reacción horizontal en C.
y
F
B
20 kN-m
2m
F
40
40
A
C
x
(a)
Problema 11.46
11.47 El mecanismo de “engrane y cremallera” de la figura se
usa para ejercer una fuerza vertical sobre una muestra en A en una
operación de estampado. Si se ejerce una fuerza F 30 lb sobre
el mango, use el principio del trabajo virtual para determinar la
fuerza ejercida sobre la muestra.
2 pulg
8 pulg
A
F
Problema 11.47
d
D
(b)
Problema 11.48
570
Capítulo 11 Trabajo virtual y energía potencial
11.49 El sistema mostrado está en equilibrio. El peso total de la
carga suspendida y del dispositivo A es de 300 lb.
a) Usando el equilibrio, determine la fuerza F.
b) Empleando el resultado del inciso (a) y el principio del trabajo
virtual, determine la distancia que se eleva la carga suspendida si
el cable se jala en B un pie hacia abajo.
11.52 En una máquina de inyección para fundido, un par M aplicado al brazo AB ejerce una fuerza sobre el pistón de inyección
en C. Dado que la componente horizontal de la fuerza en C es de
4kN, use el principio del trabajo virtual para determinar M.
B
350 mm
300 mm
45
A
M
C
B
Problema 11.52
F
11.53 Demuestre que si la barra AB está sometida a un giro virtual
d en el sentido de las manecillas del reloj, la barra CD experimenta
una rotación virtual (bⲐa)d, en sentido contrario al de las manecillas del reloj.
A
Problema 11.49
11.50 El sistema mostrado está en equilibrio.
a) Dibujando diagramas de cuerpo libre y usando las ecuaciones
de equilibrio, determine el par M.
b) Empleando el resultado del inciso a) y el principio del trabajo
virtual, determine el ángulo que gira la polea B si la polea A gira
un ángulo a.
11.54 El sistema mostrado está en equilibrio, a 800 mm
y b 400 mm. Use el principio del trabajo virtual para determinar la fuerza F.
B
F
400 mm
6 kN-m
200
N-m
M
a
100 mm
100
mm A
200
mm
Problema 11.50
11.51 El mecanismo mostrado está en equilibrio. Ignore la fricción
entre la barra horizontal y el collarín. Determine M en términos de
F, a y L.
M
D
b
Problemas 11.53/11.54
B
2L
L
C
A
200 mm
a
F
Problema 11.51
600 mm
Problemas de repaso
11.55 Demuestre que si la barra AB está sometida a un giro virtual
d en el sentido de las manecillas del reloj, la barra CD experimenta
un giro virtual [adⲐ(ac bc bd)]d, en el sentido de las manecillas del reloj.
11.56 El sistema mostrado está en equilibrio, a 300 mm, b 350
mm, c 350 mm y d 200 mm. Utilice el principio del trabajo virtual para determinar el par M.
571
11.59 El resorte no está estirado cuando a = 90°. Determine el
valor de a en el intervalo 0 a 90° para el cual el sistema está
en equilibrio.
11.60 Determine si la posición de equilibrio obtenida en el problema 11.59 es estable o inestable.
1
L
2
C
m
B
c
1
L
2
1
L
2
24 N-m
d
a
A
M
a
k
D
Problemas 11.59/11.60
b
Problemas 11.55/11.56
11.57 La masa de la barra mostrada es de 10 kg y tiene 1 m de
longitud. Ignore las masas de los dos collarines. El resorte no
está estirado cuando la barra se encuentra en posición vertical
(a 0), y la constante de resorte k 100 N/m. Determine los
valores de a para los cuales la barra está en equilibrio.
11.61 El cilindro hidráulico C de la figura ejerce una fuerza
horizontal en A, elevando el peso W. Determine la magnitud de
la fuerza que el cilindro hidráulico debe ejercer para soportar el
peso en términos de W y a.
W
11.58 Determine si la posición de equilibrio obtenida en el problema 11.57 es estable o inestable.
a
A
C
k
a
b
a
Problemas 11.57/11.58
b
1
b
2
Problema 11.61
11.62 El cuerpo compuesto homogéneo consiste en una semiesfera y un cono sobre una superficie plana. Demuestre que
esta posición de equilibrio es estable sólo si h 6 23R.
h
R
Problema 11.62
APÉNDICE
A
Repaso de matemáticas
A.1 Álgebra
Ecuaciones cuadráticas
Las soluciones de la ecuación cuadrática
ax2 bx c 0
son
x =
-b ; 2b2 - 4ac
.
2a
Logaritmos naturales
El logaritmo natural de un número real positivo x se denota con ln x y se define
como un número tal que
eln x x,
donde e 2.7182 . . . es la base de los logaritmos naturales.
Los logaritmos tienen las siguientes propiedades:
ln1xy2 = ln x + ln y,
ln1x>y2 = ln x - ln y,
ln yx = x ln y.
573
574
Apéndice A Repaso de matemáticas
A.2 Trigonometría
Las funciones trigonométricas para un triángulo rectángulo son
c
a
a
sen a =
1
a
1
b
1
a
= , cos a =
= , tan a =
= .
csc a
c
sec a
c
cot a
b
b
El seno y el coseno satisfacen la relación
sen2 a cos2 a 1,
y el seno y el coseno de la suma y la diferencia de dos ángulos satisfacen
sen1a b2 sen a cos b cos a sen b,
sen1a b2 sen a cos b cos a sen b,
cos1a b2 cos a cos b sen a sen b,
cos1a b2 cos a cos b sen a sen b.
La ley de los cosenos para un triángulo arbitrario es
c2 a2 b2 2ab cos ac,
ab
c
a
y la ley de senos es
ac
sen ab
sen aa
sen ac
=
=
.
a
c
b
aa
b
A.3 Derivadas
d n
x = nx n - 1
dx
d
sen x = cos x
dx
d
senh x = cosh x
dx
d x
e = ex
dx
d
cos x = -sen x
dx
d
cosh x = senh x
dx
d
1
ln x =
x
dx
d
1
tan x =
dx
cos2 x
d
1
tanh x =
dx
cosh2 x
A.4 Integrales
575
A.4 Integrales
L
x n dx =
L
L
L
L
xn+1
n + 1
L
-
L
2 2 1>2
L 11 - a x 2
x-1 dx = ln x
L
1a + bx21>2 dx =
2
1a + bx23>2
3b
x1a + bx21>2 dx = 11 + a 2x 221>2 dx =
+
L
dx
1n Z - 12
212a - 3bx2 1a + bx23>2
15b2
1
e x11 + a 2x 221>2
2
1>2
1
1
ln cx + a 2 + x 2 b d f
a
a
3>2
a 1
a 2 + x2b
3 a
x11 + a 2x 221>2 dx =
x 211 + a 2x 221>2 dx =
3>2
1
1
ax a 2 + x 2 b
4
a
1>2
1
1
1
x11 + a 2x 221>2 - 3 ln cx + a 2 + x 2 b d
2
8a
8a
a
11 - a 2x 221>2 dx =
L
1
1
cx11 - a 2x 221>2 + arcsen ax d
a
2
L
L
L
L
L
L
L
3>2
a 1
a 2 - x2b
3 a
L
1
x 21a 2 - x 221>2 dx = - x1a 2 - x 223>2
4
L
L
L
x11 - a 2x 221>2 dx = -
1
x
+ a 2 cx1a 2 - x 221>2 + a 2 arcsen d
a
8
dx
L 11 + a 2x 221>2
=
1>2
1
1
ln cx + a 2 + x 2 b d
a
a
L
L
=
1
arcsen ax
a
o
1
- arccos ax
a
sen x dx = -cos x
cos x dx = sen x
sen2 x dx = cos2 x dx =
1
1
sen x cos x + x
2
2
1
1
sen x cos x + x
2
2
sen3 x dx = -
1
cos x1sen2 x + 22
3
cos3 x dx =
1
sen x1cos2 x + 22
3
cos4 x dx =
3
1
1
x + sen 2x +
sen 4x
8
4
32
senn x cos x dx =
1sen x2n+1
n + 1
senh x dx = cosh x
cosh x dx = senh x
tanh x dx = ln cosh x
eax dx =
xeax dx =
eax
a
eax
1ax - 12
a2
1n Z - 12
576
Apéndice A Repaso de matemáticas
A.5 Series de Taylor
La serie de Taylor de una función f1x2 es
f 1a + x2 = f 1a2 + f ¿1a2x +
1
1
f –1a2x 2 +
f ‡1a2x 3 + Á ,
2!
3!
donde las primas indican derivadas.
Algunas series de Taylor útiles son
ex = 1 + x +
x2
x3
+
+ Á,
2!
3!
sen1a + x2 = sen a + 1cos a2x -
1
1
1sen a2x2 - 1cos a2x 3 + Á ,
6
2
cos1a + x2 = cos a - 1sen a2x -
1
1
1cos a2x 2 + 1sen a2x3 + Á ,
2
6
tan1a + x2 = tan a + a
+ a
1
sen a
bx + a 3 bx 2
2
cos a
cos a
1
sen2 a
+
bx 3 + Á .
4
cos a
3 cos2 a
APÉNDICE
B
Propiedades de áreas y líneas
B.1 Áreas
y
Las coordenadas del centroide del área A son
A
x =
LA
x dA
,
LA
LA
y =
dA
–y
y dA
.
LA
O
x
–x
dA
El momento de inercia Ix respecto al eje x, el momento de inercia Iy respecto al eje y,
y el producto de inercia Ixy son
Ix =
LA
y 2 dA,
Iy =
LA
x 2 dA,
Ixy =
LA
xy dA.
El momento polar de inercia respecto a O es
JO =
LA
r 2 dA =
LA
1x 2 + y 22 dA = Ix + Iy.
y
Área bh
y
b
1 3
bh ,
3
1 3
=
bh ,
12
1 3
hb ,
3
1 3
=
hb ,
12
Ix =
Iy =
Ix¿
Iy¿
Ixy =
1 2 2
bh
4
Ix¿y¿ = 0
1
h
2
x
h
O
1
b
2
Área rectangular
x
577
578
Apéndice B Propiedades de áreas y líneas
1 y
h
3
y
Area
Área =
h
x
x
2
b
3
O
1
bh
2
Ix =
1 3
bh ,
12
Iy =
1 3
hb ,
4
Ixy =
1 2 2
bh
8
Ix¿ =
1 3
bh ,
36
Iy¿ =
1 3
hb ,
36
Ix¿y¿ =
1 2 2
bh
72
b
Área triangular
y
a
Area
Área =
1
bh
2
Ix =
1 3
bh ,
12
Ix¿ =
1 3
bh
36
h
1
h
3
1
(a b)
3
b
O
x
x
Área triangular
y
Área pR2
R
Ix¿ = Iy¿ =
1
pR 4,
4
Ixy 0
x
Área circular
y y
Área =
Area
1
pR 2
2
1
pR 4,
8
Ixy 0
8
p
bR 4,
8
9p
Ixy 0
Ix = Iy =
R
x, x
O
Ix¿ =
4R
3p
Área semicircular
y
y
R
Área =
Area
x
O
4R
3
Área de un cuarto de círculo
x
Iy¿ = a
1
pR 4,
8
1 2
pR
4
Ix¿ = Iy¿ = a
Ix = Iy =
p
4
bR 4,
16
9p
1
pR4,
16
Ix¿y¿ = a
Ixy =
1 4
R
8
4
1
bR 4
8
9p
579
B.2 Líneas
y
Área aR2
Ix =
1 4
1
R aa - sen 2ab ,
4
2
Iy =
1 4
1
R aa + sen 2ab,
4
2
R
a
Ix y 0
O
x
a
2R sen a
3a
Sector circular
1
pab
4
Área
Area =
Ix =
1
pab3,
16
y
1
pa3b,
16
Iy =
Ixy =
1 2 2
ab
8
b
x2
y2
2 2 1
a
b
4b
3p O
4a
3p
x
a
Área de un cuarto de elipse
cbn + 1
n + 1
Área =
Area
y
y cxn
(n 1)cb
4n 2
n
c3b3n + 1
Ix =
,
9n + 3
cbn + 3
Iy =
,
n + 3
Ixy
c2b2n + 2
=
4n + 4
x
(n 1)b
n2
b
Enjuta
B.2 Líneas
Las coordenadas del centroide de la línea L son
x =
LL
x dL
LL
,
y =
LL
dL
y
y dL
LL
,
z =
dL
LL
L
z dL
LL
.
dL
–y
z
y
y
R
R
y
a
x
2R
p
2R
p
Arco semicircular
R
x
2R
p
Arco de un cuarto de círculo
a
R sen a
a
Arco circular
x
–x
–z
x
APÉNDICE
C
Propiedades de volúmenes
y objetos homogéneos
Las coordenadas del centroide del volumen V son
y
V
x =
–y
z
–x
x dV
,
LV
x
–z
LV
y =
dV
LV
y dV
,
z =
dV
LV
LV
r
L0
El momento de inercia del objeto respecto al eje L0 es
I0 =
y
1 y
l
2
O
Lm
r 2 dm.
Ieje x = 0,
x, x
Ieje x = 0,
Ieje y = Ieje z
Barra esbelta
y
Ieje x = Ieje y =
R
z
x
Placa circular delgada
580
1 2
ml
3
1
=
ml 2
12
Ieje y = Ieje z =
l
z
z dV
.
dV
El centro de masa de un objeto homogéneo coincide con el centroide de su volumen.
dm
z
LV
1
mR 2,
4
Ieje z =
1
mR 2
2
Apéndice C Propiedades de volúmenes y objetos homogéneos
Ieje x =
1 2
mh ,
3
1 2
mb ,
3
Ieje y =
Ieje z =
1
m1b2 + h22
3
y
y
1
b
2
Ieje x¿ =
1
mh2,
12
1
mb2,
12
Ieje y¿ =
Ieje z¿ =
h
1
m1b 2 + h22
12
b
1
h
2 O
x
z
z
x
Placa rectangular delgada
Ieje x =
m
I ,
A x
Ieje y =
m
I ,
A y
Ieje z = Ieje x + Ieje y
y
Los términos Ix e Iy son los momentos de inercia del área de la sección transversal
de la placa A respecto a los ejes x e y.
A
z
x
Placa delgada
Volumen abc
Ieje x¿
1
=
m1a2 + b22,
12
Ieje z¿ =
Ieje y¿
y
1
=
m1a2 + c22,
12
1
m1b2 + c22
12
b
x
a
z
c
Prisma rectangular
Volumen pR2l
1
1
Ieje x = Ieje y = ma l 2 + R 2 b,
3
4
Ieje x¿ = Ieje y¿
1
1
= ma l 2 + R 2 b,
12
4
Ieje z =
Ieje z¿
1
mR 2
2
1
= mR 2
2
y
R
z, z
y
1
l
2
O
x
l
Cilindro circular
x
581
582
Apéndice C Propiedades de volúmenes y objetos homogéneos
y
Volumen =
y⬘
O
3
h
4
x⬘
R
z, z⬘
x
h
Cono circular
1 2
pR h
3
3
3 2
Ieje x = Ieje y = ma h2 +
R b,
5
20
Ieje x¿ = Ieje y¿ = ma
y⬘
Volumen =
R
Ieje z =
3 2
3 2
R b,
h +
20
80
4 3
pR
3
Ieje x¿ = Ieje y¿ = Ieje z¿ =
2
mR2
5
x⬘
z⬘
Esfera
y⬘
Volumen =
y
2 3
pR
3
Ieje x = Ieje y = Ieje z =
3R
8
R
O
x⬘
x
z, z⬘
Semiesfera
Ieje x¿ = Ieje y¿ =
2
mR2
5
83
2
mR2, Ieje z¿ = mR2
320
5
3
mR2
10
Ieje z¿ =
3
mR2
10
Soluciones a los problemas de práctica
Ejemplo activo 1.1
Convierta pies a millas.
Convierta segundos a horas.
10 pies/s 10 pies/s
5280 pies 1 mi
3600 s
1h
6.82 mi/h.
Ejemplo activo 1.4
Use la ecuación (1.6) para
calcular el peso en newtons.
W mg (0.397 kg)(9.81 m/s2) 3.89 N.
Ejemplo activo 2.1
Dibuje los vectores U y 2V a escala
y colóquelos cabeza con cola.
8
6
U
45
2V
U
2V
El valor medido de
U 2V es 5.7.
5.7
583
584
Soluciones a los problemas de práctica
Ejemplo activo 2.3
Fy 3Fx.
La magnitud de F es
900 N F2x F2y
Se requiere que la magnitud de la
componente y de F sea tres veces
la magnitud de la componente x.
F2x (3Fx )2.
Resolviendo se obtiene
Fx 285 N. El vector F en
términos de sus componentes es
F 285i 3(285)j (N)
285i 854j (N).
y
A
Fy
3Fx
Use triángulos semejantes para determinar la ubicación del punto B:
F
xB
Fx
:
80 m 3Fx
80 m
xB 26.7 m.
Fx
B
x
xB
Ejemplo activo 2.6
y
D (2, 3, 1) m
rBD
x
z
rBD (xD xB)i (yD yB)j (zD zB)k
(2 2.4)i (3 0)j (1 3)k (m)
0.4i 3j 2k (m).
B (2.4, 0, 3) m
Determine el vector de posición rBD
en términos de sus componentes.
Soluciones a los problemas de práctica
rBD r2BDx r2BDy r2BDz
Calcule la magnitud de rBD.
(0.4 m)2 (3 m)2 (2 m)2
3.63 m.
eBD rBD
rBD
Divida rBD entre su magnitud para obtener
eBD en términos de sus componentes.
0.4i 3j 2k (m)
3.63 (m)
0.110i 0.827j 0.551k.
Ejemplo activo 2.11
Los vectores U y V son perpendiculares si U ⴢ V = 0. Use esta condición para
determinar Vx.
UⴢV UxVx UyVy UzVz
Calcule U·V en términos de las
componentes de los vectores.
(6)Vx (5)(2) (3)(2)
6Vx 16.
UⴢV 6Vx 16 0,
Vx 2.67.
Iguale U·V a cero y despeje Vx.
Ejemplo activo 2.14
El producto cruz U * V es perpendicular a U y perpendicular a V. Al determinar el
vector U * V en términos de sus componentes y dividirlo entre su magnitud ƒ U * V ƒ,
se pueden obtener las componentes de un vector unitario que es perpendicular a U y
perpendicular a V.
U V (UyVz UzVy)i (UxVz UzVx)j
(UxVy UyVx)k
[(2)(4) (1)(3)]i [(3)(4) (1)(5)]j
Calcule U V en términos de
las componentes de los vectores.
[(3)(3) (2)(5)]k
11i 7j 19k.
2
2
2
U V (11) (7) (19)
23.0.
11i 7j 19k
UV
23.0
U V
0.477i 0.304j 0.825k.
Divida el vector U V
entre su magnitud.
585
586
Soluciones a los problemas de práctica
Ejemplo activo 3.1
Dibujo del diagrama de cuerpo libre del automóvil
Trace un bosquejo del automóvil aislado.
Complete el diagrama de cuerpo libre
mostrando las fuerzas ejercidas sobre el
automóvil por su peso, el cable y la rampa.
T
N
mg
Aplicación de las ecuaciones de equilibrio
Fx T mg sen 20 0,
T
y
Fy N mg cos 20 0.
x
20
mg
Despejando T se obtiene
N
T mg sen 20
(1440 kg)(9.81 m/s2)sen 20
4830 N.
Ejemplo activo 3.5
Dibujo del diagrama de cuerpo libre y aplicación del equilibrio
y
C
x
Aísle una parte del sistema de cables cerca
del punto A y muestre las fuerzas ejercidas debido a las tensiones en los cables. La suma
de las fuerzas debe ser igual a cero:
F TAB TAC TAD (981 N)j 0.
B
D
TAC
TAB
TAD
z
A
A
(100 kg)(9.81m/s2)j
Soluciones a los problemas de práctica
Expresión de las fuerzas en términos de sus componentes
y
C
rAB
x
B
(4, 0, 2) m
D
A
z
Obtenga un vector unitario que
tenga la misma dirección que la
fuerza TAB dividiendo el vector
de posición rAB del punto A al
punto B entre su magnitud.
rAB (xB xA)i (yB yA)j (zB zA)k
4i 6j 2k (m).
r
eAB AB 0.535i 0.802j 0.267k.
rAB
TAB TABeAB
TAB(0.535i 0.802j 0.267k),
TAC TAC (0.302i 0.905j 0.302k),
TAD TAD (0.408i 0.817j 0.408k).
(0, 6, 0) m
Exprese la fuerza TAB en términos
de sus componentes, escribiéndola
como el producto de la tensión TAB
en el cable AB y el vector unitario
eAB. Exprese las fuerzas TAC y TAD
en términos de sus componentes
usando el mismo procedimiento.
Sustituya estas expresiones en la ecuación de equilibrio
TAB TAC TAD (981 N)j 0.
Como cada una de las componentes i, j y k debe ser igual
a cero, lo anterior resulta en tres ecuaciones:
0.535TAB 0.302TAC 0.408TAD 0,
0.802TAB 0.905TAC 0.817TAD 981 N 0,
0.267TAB 0.302TAC 0.408TAD 0.
Al resolver estas tres ecuaciones se obtiene TAB = 432 N, TAC = 574 N y
TAD = 141 N.
587
588
Soluciones a los problemas de práctica
Ejemplo activo 4.1
y
40 kN
40 sen 30 kN
30
A
Descomponga la fuerza de 40 kN en
sus componentes horizontal y vertical.
x
40 cos 30 kN
6m
La magnitud del momento de la componente horizontal
respecto a A es igual a cero. La magnitud del momento de
la componente vertical es (6 m)(40 sen30 N) 120 kN-m.
Su sentido es contrario al de las manecillas del reloj, por
lo que la suma de los momentos es
MA 120 kN-m.
Calcule la suma de los momentos
de las componentes respecto a A.
Ejemplo activo 4.4
y
rAC
C (7, 7, 0) pies
A
(0, 6, 5) pies
F
z
x
B
(11, 0, 4) pies
rAC (xC xA)i (yC yA)j (zC zA)k
7i j 5k (pies).
MA rAC F
i
7
j
1
40
70
a) Aplique la ecuación (4.2) para
determinar el momento de F respecto al punto A.
k
5
40
310i 480j 530k (pies-lb).
D
MA
F
(310) (480) (530) pies-lb
90 lb
8.66 pies.
2
2
2
b) Use la relación MA DF, donde D
es la distancia perpendicular desde A
hasta la línea de acción de F.
Soluciones a los problemas de práctica
Ejemplo activo 4.6
Determine las componentes del
vector desde el punto C hasta el
punto de aplicación de F.
r (xA xC)i (yA yC)j (zA zC)k
4i 2j 2k (m).
MC r F
i
4
j
2
k
2
2
6
3
Calcule el momento de F respecto
al punto C.
18i 16j 20k (kN-m).
Aplique la ecuación (4.4) para
determinar el momento de F respecto al eje BC. Aunque el momento de F respecto al punto C no es el
mismo que el de F respecto a B,
sus componentes paralelas al eje
BC son iguales.
MBC (eBCⴢMC)eBC
[(0)(18) (0.8)(16) (0.6)(20)]eBC
24.8eBC (kN-m).
Ejemplo activo 4.9
y
P
(10, 7, 3) m
r2
ⴚF
(6, 6, 0) m
r1
(8, 3, 0) m
F
x
M (r1 F) [r2 (F)]
i
2
j
4
10
4
k
i
3 4
0
10
j
1
k
3
4
0
Calcule la suma de los momentos de
las dos fuerzas respecto al punto P.
22k (N-m).
y
La magnitud del momento es 22 N-m. Si
se apunta el pulgar de la mano derecha en
la dirección del vector unitario k, el
sentido del momento en el plano x-y es
contrario al de las manecillas del reloj.
22 N-m
x
589
590
Soluciones a los problemas de práctica
Ejemplo activo 4.12
i
F F
20i 15j 5k (kN).
La fuerza F debe ser igual a la
suma de las fuerzas en el sistema 2.
3 2 (105i 110j 90k)
15 5
El par M debe ser igual a la
suma de los momentos respecto al origen debidos a las fuerzas y momentos del sistema 2.
j
M 4
20
k
90i 90j 90k (kN-m).
Ejemplo activo 5.1
a) Dibuje un diagrama de la viga
aislada de sus soportes de pasador y rodillo, y muestre las
reacciones debidas al soporte.
y
4 kN
Ax
x
b) Escriba las ecuaciones de equilibrio,
B
Ay
Fx Ax 0,
Fy Ay B 4 kN 0,
Mextremo izquierdo (3 m)B (2 m)(4 kN) 0,
y resuélvalas para obtener
2m
3m
Ax 0, Ay 1.33 kN, B 2.67 kN.
Ejemplo activo 5.5
y
MA
2 kN
A
B
x
Ax
Bx
By
Ay
Dibuje el diagrama de cuerpo
libre. Existen cinco reacciones
desconocidas.
3m
5m
Fx Ax Bx 0,
Fy Ay By 2 kN 0,
Escriba las ecuaciones de equilibrio.
Mpunto A MA (5 m)By (3 m)(2 kN) 0.
Existen tres ecuaciones de equilibrio independientes, por lo que la viga es estáticamente indeterminada y el grado de redundancia es 5 3 2. No es posible
determinar ninguna de las reacciones a partir de las ecuaciones de equilibrio.
Soluciones a los problemas de práctica
Ejemplo activo 5.7
Dibujo del diagrama de cuerpo libre de la barra
y
B
Ay
200j (N)
MAy
Aísle la barra y muestre las reacciones
ejercidas por los cables y el soporte de
bola y cuenca.
x
MAz
Az
z
MAx
Ax
Reacciones debidas al
soporte fijo
Aplicación de las ecuaciones de equilibrio
Fx Ax 0,
Las sumas de las fuerzas en cada dirección coordenada deben ser iguales a cero.
Fy Ay 200 N 0,
Fz Az 0.
Mpunto A MAxi MAyj MAzk MAxi MAyj MAzk 2 r
1
AB
(200j)
i
j
k
0.5
0.3
0.2
0 200
0
(MAx 40)i MAyj (MAz 100)k.
Cada una de las componentes de este vector (las sumas de los momentos respecto a los tres ejes coordenados) debe ser igual a cero,
Mx MAx 40 N-m 0,
My MAy 0,
Mz MAz 100 N-m 0.
Al resolver las seis ecuaciones de equilibrio se obtiene
Ax 0, Ay 200 N, Az 0, MAx 40 N-m,
MAy 0, y MAz 100 N-m.
La suma de los momentos
respecto a cualquier punto es
igual a cero.
591
592
Soluciones a los problemas de práctica
Ejemplo activo 5.10
P
a
y
La fuerza ejercida por la barra AB sobre la placa debe estar dirigida a lo largo de la línea
entre A y B. La línea de acción del peso de la
placa es vertical, de manera que las tres fuerzas
sobre la placa no son paralelas. Por lo tanto,
éstas deben ser concurrentes.
B
45
x
C
100 lb
3
pies
1
pie
El ángulo a arctan(1/3) 18.4.
Fx B sen45 C sena 0,
Aplique las ecuaciones de
equilibrio.
Fy B cos45 C cosa 100 lb 0.
Resolviendo se obtienen las reacciones B 35.4 lb, C 79.1 lb.
Ejemplo activo 6.1
2 kN
A
3.33 kN
C
D
3.33 kN B
2 kN
y
a
3.33 kN B
TBC
TBD
x
El ángulo a arctan(5/3) 59.0.
Fx TBC sena TBD 3.33 kN 0,
Fy TBC cosa 0.
Resolviendo se obtiene
TBC 0 y TBD 3.33 kN. La fuerza axial en
el elemento BC es cero y la fuerza axial en el
elemento BD es 3.33 kN en compresión o
BC: cero, BD: 3.33 kN (C).
(Observe que la junta C es una de las “juntas
especiales” que se analizaron. Mediante
observación, podría haberse determinado que
TBC 0).
Dibuje el diagrama de
cuerpo libre de la junta
B y aplique las ecuaciones de equilibrio.
Soluciones a los problemas de práctica
Ejemplo activo 6.3
A
B
C
D
E
F
G
H
I
J
K
L
1m
M
100 kN
Corte los elementos DE, DK y JK
mediante planos y dibuje el diagrama de cuerpo libre de la sección.
y
TDE E
F
TDK
45
M
TJK
K
L
100 kN
Fx TDE TDK cos45 TJK 0,
Fy TDK sen45 100 kN 0,
Mpunto K (1 m)TDE (2 m)(100 kN) 0.
Resolviendo se obtiene TDE 200 kN, TDK 141 kN,
y TJK 300 kN. Las cargas axiales son
DE: 200 kN (T), DK: 141 kN (T),
JK: 300 kN (C).
Aplique las ecuaciones de
equilibrio.
x
593
594
Soluciones a los problemas de práctica
Ejemplo activo 6.5
Se pueden determinar las fuerzas axiales en los elementos AB y AC analizando la
junta A.
1200 lb
TAD
TAB
TAC
Dibuje el diagrama de cuerpo
libre de la junta A.
y
1200 lb
A (5, 3, 2) pies
B
D (10, 0, 0) pies
x
440 lb
360 lb
z
C
(6, 0, 6) pies
400 lb
rAB 5i 3j 2k (pies).
rAB
0.811i 0.487j 0.324k.
eAB rAB
TAB eAB TAB (0.811i 0.487j 0.324k),
TAC eAC TAC (0.196i 0.588j 0.784k),
TAD eAD TAD (0.811i 0.487j 0.324k).
TAB eAB TAC eAC TAD eAC (1200 lb)j 0.
Cada una de las componentes i, j y k de esta ecuación
debe ser igual a cero, de donde resultan las tres ecuaciones
0.811TAB 0.196TAC 0.811TAD 0,
0.487TAB 0.588TAC 0.487TAD 1200 lb 0,
0.324TAB 0.784TAC 0.324TAD 0.
Resolviendo se obtiene TAB 904 lb, TAC 680 lb,
y TAD 740 lb. Las fuerzas axiales son
AB: 904 lb (C), AC: 680 lb (C).
Divida el vector de posición de A
a B entre su magnitud para obtener
un vector unitario eAB que apunta
desde A hacia B. Exprese la fuerza
axial en el elemento AB en términos
de sus componentes escribiéndola
como TAB eAB. De la misma manera,
exprese las fuerzas axiales en los
elementos AC y AD en términos de
sus componentes.
Aplique el
equilibrio.
Soluciones a los problemas de práctica
Ejemplo activo 6.6
Ay
A
Ax
B
200 N-m
400 mm
C
Cx
1000 mm
Cy
Fx Ax Cx 0,
Fy Ay Cy 0,
Dibuje el diagrama de cuerpo
libre de todo el bastidor y
aplique las ecuaciones de
equilibrio.
Mpunto A 200 N-m (0.4 m)Cx (1 m)Cy 0.
A partir de estas ecuaciones no se puede determinar
ninguna reacción. El diagrama de cuerpo libre de todo
el bastidor es estáticamente indeterminado.
Ax
Ay
By
A
B
Bx
600 mm
Ay
Dibuje los diagramas
de cuerpo libre de los
elementos individuales.
By
Ax
A
B
Bx
B
200 N-m
200 N-m
400 mm
C
C
Cx
Cy
Cx
400 mm
Cy
Fx Ax Bx 0,
Fy Ay By 0,
Mpunto A (0.6 m)By 0.
Resolviendo se obtiene Ay 0, By 0,
y Ax Bx. (Observe que AB es un elemento de dos fuerzas. Estos resultados podrían
haberse obtenido por observación.)
Aplique el equilibrio al
elemento AB.
Fx Bx Cx 0,
Fy By Cy 0,
Mpunto B 200 N-m (0.4 m)Cx (0.4 m)Cy 0.
Como ya se había determinado que By 0, estas ecuaciones pueden resolverse para Bx, Cx y Cy. Los resultados son
Bx 500 N, Cx 500 N, y Cy 0, con lo que se
completa la solución.
Aplique el equilibrio al elemento BC.
595
596
Soluciones a los problemas de práctica
Ejemplo activo 7.1
y
dA
1 h
x
2 b
x
b
LA
y
LA
ydA
1 h
x
L0 2 b
dA
h
xdx
b
b
h
xdx
L0 b
x3
3
2
1 h
2 b
h x2
b 2
b
b
0
El área de la franja es dA (h/b)xdx.
La altura del punto medio de la tira es
y (1/2)(h/b)x. Use estas expresiones
para evaluar la ecuación (7.7).
1
h.
3
0
Ejemplo activo 7.3
y
1
Elección de las partes
Divida el área en partes sencillas. Se
muestran las coordenadas y de los
centroides de las partes.
1
(2R)
3
2
3
R
b
c
Determinación de los valores para las partes
Tabule los términos necesarios para aplicar la ecuación (7.9)2.
yi
Ai
yiAi
1
(2R)
3
1
b(2R)
2
3 (2R) 12 b(2R) Parte 2 (rectángulo)
R
c(2R)
R[c(2R)]
Parte 3 (semicírculo)
R
1
pR2
2
Parte 1 (triángulo)
1
12 pR R
x
2
x
Soluciones a los problemas de práctica
y1A1 y2A2 y3A3
A1 A2 A3
y
3 (2R) 12 b(2R) R[c(2R)] R 12 pR 1
2
1
1
b(2R) c(2R) pR2
2
2
.
Cálculo del centroide
Use la ecuación (7.9)2 para
determinar la componente
y del centroide.
Ejemplo activo 7.5
(a)
w ax b.
0 a(0) b,
100 N/m a(12 m) b.
Resolviendo se obtiene
a (100/12) N/m2 y b 0. Por lo tanto
100
w
x N/m.
12
Escriba w como una función
lineal arbitraria de x.
Use los valores conocidos de w en x 0 y en
x 12 m para determinar las constantes a y b.
(b)
F
LL
wdx
12
100
xdx
L0 12
600 N.
M xw dx
LL
12
100 2
x dx
L0 12
4800 N-m.
Aplique la ecuación (7.10) para determinar la
fuerza hacia abajo ejercida por la carga distribuida.
Aplique la ecuación (7.11) para determinar el momento alrededor del origen, con sentido contrario
al de las manecillas del reloj, ejercido por la carga
distribuida.
597
598
Soluciones a los problemas de práctica
Ejemplo activo 7.8
y
El volumen de un disco
de grosor dx es
r
dV pr2dx
x
x
2
p 1
dx
1
x dx.
4
4 pies
4
x dV
x
LV
dV
LV
2
xp 1 1 x dx
4
L0
4
L0
2
p 1 1 x dx
4
Aplique la ecuación
(7.15)1.
2.43 pies.
Ejemplo activo 7.11
y
Elección de las partes
Divida el volumen en partes sencillas. Se
muestran las coordenadas x de los centroides de las partes. Vea el apéndice C.
1 2
x
1
b
2
b
Determinación de los valores para las partes
Tabule los términos necesarios para aplicar la ecuación (7.17)1.
Parte 1 (cilindro)
Parte 2 (semiesfera)
xi
Vi
xiVi
1
b
2
pR2b
12 b (pR b)
b 38 R 23 pR b
3
R
8
2
pR3
3
2
3
3
R
8
Soluciones a los problemas de práctica
x
x1V1 x2V2
V1 V2
1
b
2
3
pR2b b R
8
2
pR2b pR3
3
2
pR3
3
.
Cálculo del centroide
Use la ecuación (7.17)1 para
determinar la componente
x del centroide.
Ejemplo activo 7.14
Haciendo girar esta área triangular alrededor del eje x se genera el volumen del
cono. Se muestra la coordenada y del
centroide del área. El área del triángulo es
1
A hR. El volumen del cono es
2
1
V 2pyT A phR2.
3
y
R
_
1
yT R
3
x
h
Ejemplo activo 7.16
B
B
1m
A
x
Ax
(80)(9.81) N
Ay
2(1 m)
p
Fx Ax B 0,
Fy Ay (80)(9.81) N 0,
2(1 m)
[(80)(9.81) N] 0.
p
Resolviendo se obtiene Ax 500 N, Ay 785 N, y
B 500 N.
Mpunto A (1m)B Coloque el peso de la
barra en su centro de
masa (el centroide de su
eje; vea el Apéndice B.2)
y aplique el equilibrio.
599
600
Soluciones a los problemas de práctica
Ejemplo activo 7.18
El centro de masa coincide con
el centroide del volumen de la
barra, por lo tanto
1
y1 (240 mm) 120 mm.
2
Centro de masa de la barra 1.
La coordenada y del centroide del
volumen es
1
y2 (80 mm) 40 mm.
2
y
Centro de masa de la barra 2.
y1m1 y2m2
m1 m2
(120 mm)(10.8 kg) (40 mm)(5.99 kg)
10.8 kg 5.99 kg
91.4 mm.
Aplique la ecuación (7.27)2.
Ejemplo activo 8.1
y
dAs
dy
f(x)
y
x
x
dx
(Ixy)franja
Lfranja
xydAs
f(x)
(xydx)dy
L0
1
2
[f(x)] xdx.
2
Considere que dAs es un elemento de la
franja vertical dA y aplique la ecuación (8.5).
b
Ixy 1
[f(x)]2xdx
L0 2
b
1 h 2
x xdx
L0 2 b
1
b2h2.
8
Integre la expresión para (Ixy)franja con
respecto a x desde x 0 hasta x b a
fin de determinar Ix para el triángulo.
Soluciones a los problemas de práctica
Ejemplo activo 8.3
y
y
0.5 m
1
x
2m
x
A partir del Apéndice B, el producto de inercia del
área 1 en términos del sistema coordenado xy es
(Ixy)1 0.
Por lo tanto, el producto de inercia del área 1
respecto al sistema coordenado xy es
(Ixy)1 0 (0.5 m)(2 m)(1 m)(4 m) 4 m4.
Aplique la ecuación (8.12)
al área 1.
y
y
2m
2
0.5 m
El producto de inercia del área 2 en términos del
sistema coordenado xy es
(Ixy)2 0.
El producto de inercia del área 2 en términos del
sistema coordenado xy es
x
x
Aplique la ecuación (8.12)
al área 2.
(Ixy)2 0 (2 m)(0.5 m)(2 m)(1 m) 2 m4.
El producto de inercia del área compuesta,
en términos del sistema coordenado xy, es
Ixy (Ixy)1 (Ixy)2
4m 2m
6 m4.
4
4
Sume los valores para las partes.
601
602
Soluciones a los problemas de práctica
Ejemplo activo 8.6
tan 2up 2Ixy
2(6)
1.71.
Iy Ix 16 9
Determine up a partir de la
ecuación (8.26).
De aquí se obtiene up 29.9.
y
y
x
29.9
x
Ix Iy
Ix Iy
cos 2u Ixysen 2u
2
2
9 16
9 16
cos[2(29.9)] (6)sen[2(29.9)]
2
2
Ix Calcule los momentos de
inercia principales a
partir de las ecuaciones
(8.23) y (8.24).
5.55 m4,
Ix Iy
Ix Iy
cos 2u Ixysen 2u
2
2
9 16
9 16
cos[2(29.9)] (6)sen[2(29.9)]
2
2
Iy 19.4 m4.
Ejemplo activo 8.8
10
Coloque el punto 1 en uno de los puntos donde el círculo de Mohr interseca al eje horizontal. Los momentos de
inercia principales son Ix 7.5 pies4, Iy 24.5 pies4. El
ángulo medido en sentido contrario al de las manecillas
del reloj desde el punto 1 hasta el punto 1 es 2up 135,
por lo que up 67.5.
y
x
up 67.5
y
x
1
2up
2
(Iy, Ixy)
1
0
(Ix, Ixy)
2
10
0
10
20
30
Soluciones a los problemas de práctica
Ejemplo activo 8.9
Con base en el
Apéndice B,
1
Iy hb3.
4
Determine el momento de
inercia del área de la placa
respecto al eje y.
El momento de inercia de la
placa respecto al eje y es
m
Ieje y Iy
A
m 1 3
hb
1
bh 4
2
1
mb2.
2
Aplique la ecuación (8.30).
Ejemplo activo 8.11
2
Trate al objeto como a un cuerpo compuesto por
las barras 1 y 2. Se muestra la distancia entre el
eje LO y los ejes que pasan por los centros de
masa de las dos barras.
l 2
2 1/2
( 12 l )
1
LO
O
1
l
2
(IO)1 I d2m
1 2
1 2
l m
ml 12
2
1
ml2.
3
Aplique el teorema de los
ejes paralelos a la barra 1.
(IO)2 I d2m
2
m
1 2
1
ml l2 l
12
2
4
ml2.
3
IO (IO)1 (IO)2
1
4
ml2 ml2
3
3
5 2
ml .
3
Aplique el teorema de los
ejes paralelos a la barra 2.
Sume los resultados.
603
604
Soluciones a los problemas de práctica
Ejemplo activo 9.1
y
Dibuje el diagrama de cuerpo libre de la caja. Se supone que el deslizamiento de la caja hacia arriba de la
rampa es inminente, por lo que la dirección de la fuerza de fricción sobre la caja es hacia abajo de la rampa
y su magnitud es msN.
T
W
f m sN
N
Fx T N sen 20 msN cos 20 0,
Fy N cos 20 msN sen 20 W 0.
Aplique el equilibrio.
Resolviendo estas ecuaciones se obtiene T 161 lb.
Ejemplo activo 9.4
Dibuje el diagrama de cuerpo libre de la cuña suponiendo que F 0 y que el deslizamiento de la cuña
fuera del tronco es inminente.
La suma de las fuerzas en la dirección vertical es
a
a
2N sen
2msN cos
0.
2
2
La cuña está en equilibrio si
N
msN
a
10
tan
0.0875.
2
2
Éste es el coeficiente de fricción estática mínimo necesario para que la cuña permanezca en su lugar en el
tronco, por lo que ésta no se deslizará hacia fuera.
ms tan
a
Aplique el
equilibrio.
Ejemplo activo 9.5
La fuerza F 200 lb, la pendiente de la rosca es
a 1.14, y el ángulo de fricción es
uk arctan mk arctan (0.22) 12.4.
Sustituyendo estos valores en la ecuación (9.11),
M rF tan(uk a)
(1.6 pulg)(200 lb) tan(12.4 1.14)
63.8 pulg-lb.
Aplique la ecuación (9.11).
N
msN
x
Soluciones a los problemas de práctica
Ejemplo activo 9.6
La polea se mueve en el sentido contrario al de las manecillas
del reloj. Exprese el par que actúa sobre la polea en dirección
inversa a la de las manecillas del reloj en términos de T y W.
M (6 pulg)(W T).
El ángulo de fricción cinética es
uk arctan mk arctan(0.2) 11.3.
La ecuación (9.12) es
M rF sen uk:
(6 pulg)(W T) (0.5 pulg) (W T sen 45)2 (T cos 45)2 sen11.3.
Aplique la ecuación (9.12).
Estableciendo W 1000 lb y resolviendo se obtiene
T 970 lb.
Ejemplo activo 9.7
Los radios ro 1.75 pulg y ri 0.5 pulg.
a arctan[b/(ro ri)] arctan[5/(1.75 0.5)] 76.0.
M
2mkF
3 cos a
Determine el ángulo a.
ro3 r3i
ro2 r2i
2(0.18)(200 lb) (1.75 pulg)3 (0.5 pulg)3
3 cos 76.0
(1.75 pulg)2 (0.5 pulg)2
Aplique la ecuación (9.13).
184 pulg-lb.
Ejemplo activo 9.9
T Wemsb (100 lb)e(0.2)(p/2) 137 lb.
Aplique la ecuación (9.17) al cilindro izquierdo. Suponga que el deslizamiento de la cuerda en la dirección de la fuerza T es inminente.
F Te
Aplique la ecuación (9.17) al cilindro derecho.
Suponga que el deslizamiento de la cuerda en
la dirección de la fuerza F es inminente.
(0.4)(p/2)
(137 lb)e
(0.4)(p/2)
257 lb.
605
606
Soluciones a los problemas de práctica
Ejemplo activo 10.1
y
F
1
L
2
VC
x
PC
MC
C
3
F
4
3
L
4
Fx PC 0,
3
F 0,
4
3
1
MpuntoC MC L F L
4
2
Dibuje el diagrama de cuerpo libre de la parte
de la viga a la derecha de C (observe las direcciones positivas definidas de PC, VC, y MC.)
Aplique el equilibrio para determinar las
fuerzas y el momento internos.
Fy VC F 4 F 0.
Resolviendo se obtiene PC 0, VC 3
1
1
LF.
F, y MC 16
4
Ejemplo activo 10.3
a) Pase un plano a través de la viga en
una posición arbitraria x entre B y C.
El diagrama de cuerpo libre más sencillo se obtiene aislando la parte de la
viga a la derecha del plano.
y
60 kN
40 kN/m
x
A
B
100 kN
C
80 kN
y
60 kN
V
M
x
P
C
x
4x
Soluciones a los problemas de práctica
Fx P 0,
Fy V 60 0,
Mextremo izquierdo M 60(4 x) 0.
Aplique el equilibrio para
determinar V y M.
Resolviendo se obtiene
V 60 kN
M 60(4 x) kN-m
2
x
4 m.
y
60 kN
40 kN/m
x
A
C
B
80 kN
100 kN
2m
2m
V
100 kN
20 kN
0
x
60 kN
M
120 kN-m
0
x
607
608
Soluciones a los problemas de práctica
Ejemplo activo 10.4
No se aplica ningún par en A, por lo
que el momento flector en A es igual
a cero. La fuerza cortante entre A y
B es V 100 40x kN. Con esta
expresión, la ecuación (10.6) puede
integrarse para determinar el momento flector entre A y B:
M
L0
V
100 kN
20 kN
A
B
C
60 kN
2m
2m
x
dM L0
(100 40x)dx :
M 100x 20x2 kN-m.
El valor de M en B es
M
120 kN-m
x
100(2) 20(2)2 120 kN-m.
La fuerza cortante entre B y C es
V 60 kN. Como V es constante, la
ecuación (10.6) indica que la pendiente del momento flector es constante: el
diagrama es una línea recta. Debido a
que no se aplica ningún par sobre la viga en C, el momento flector en C es
igual a cero. Por lo tanto, M disminuye
linealmente desde 120 kN-m en B hasta
cero en C. Este resultado también puede
obtenerse integrando la ecuación (10.6):
M
L120
x
V
100 kN
20 kN
A
C
60 kN
2m
M
120 kN-m
x
dM B
2m
Entre B y C,
dM
const.
dx
L2
M 240 60x kN-m.
4m
Ejemplo activo 10.6
T T0 1 a2x2L
(686 lb) 1 (0.146 pies1)2 (23.4 pies)2
2440 lb.
MC 0
60dx :
La tensión está dada por la ecuación (10.11) en
términos de la tensión en el punto más bajo y la
coordenada horizontal respecto al punto más
bajo. A partir de la ecuación (10.11), resulta
claro que la tensión máxima ocurre en la distancia horizontal máxima desde el punto más bajo,
que en este ejemplo es el punto de unión izquierdo. La tensión máxima es
x
Aplique la ecuación (10.11) para
determinar la tensión máxima.
x
Soluciones a los problemas de práctica
Ejemplo activo 10.8
La tensión máxima ocurre donde la distancia horizontal desde el punto más bajo
hasta el punto más alto, en x 10 m:
Aplique la ecuación (10.21)
T T0 coshax
(50 N)cosh[(0.196 m1)(10 m)]
181 N.
Ejemplo activo 10.9
Tv
1m
Th
1m
El ángulo a es
a
h2 1 m
a arctan
1m
1.25 m 1 m
arctan
1m
14.0.
La suma de las fuerzas horizontales es
T2cosa Th 0,
de donde resulta
Th
T2 cosa
131 N
cos14.0
135 N.
T2
m1g
Corte el cable en el punto de
unión izquierdo y en un punto perteneciente al segmento
2 y sume las fuerzas en la
dirección horizontal.
609
610
Soluciones a los problemas de práctica
Ejemplo activo 10.10
La presión manométrica pg gx aumenta linealmente desde pg 0 en la
superficie del agua pg (2 pies)g en la
parte baja de la compuerta. Se muestra
el centroide de la distribución.
z
2
(2 pies) 1.33 pies
3
2 pies
x
F
1
(2 pies)[(2pies)(62.4 lb/pies2)](3 pies)
2
374 lb.
(2 pies) g
Determine la fuerza total ejercida por la
presión manométrica calculando el
“volumen” de la distribución de presión.
El “volumen” es el producto del “área”
del triángulo en la figura anterior por la
dimensión de la compuerta que es perpendicular a la página.
B
1 pie
z
1.33 pies
100 lb
2 pies
374 lb
Az
Ax
x
Fx Ax 100 lb 0,
Fz Az B 374 lb 0,
Meje y (1 pie)B (2 pies)Az (1.33 pies)(374 lb) 0.
Resolviendo se obtiene Ax 100 lb, Az 291 lb, y
B 83.2 lb.
Dibuje el diagrama de cuerpo
libre de la compuerta,colocando la fuerza total ejercida por
la presión manométrica en el
centro de presión. Aplique
el equilibrio para determinar
las reacciones en A y B.
Soluciones a los problemas de práctica
611
Ejemplo activo 11.1