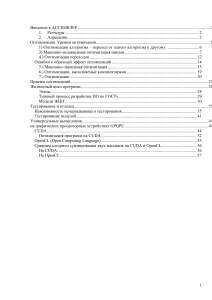
Министерство образования Республики Беларусь Учреждение образования БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ Факультет информационных технологий и управления Кафедра систем управления Дисциплина «Телемеханика» ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К курсовому проекту На тему УСТРОЙСТВО ТЕЛЕИЗМЕРЕНИЯ БГУИР КП 1-53 01 07 24 ПЗ Студент группы 022402 Сеглюк И. О. Руководитель Кривинченко Г. А. Минск 2023 Содержание ВВЕДЕНИЕ ....................................................................................................................................5 1 ОБЛАСТЬ ПРИМЕНЕНИЯ СИСТЕМЫ И ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА....................................................................................................................................6 2 СТРУКТУРА СИСТЕМЫ ..........................................................................................................7 2.1 Выбор структуры системы .....................................................................................................7 2.2 Выбор линии связи ..................................................................................................................7 2.3 Выбор структуры сигналов ....................................................................................................8 3 АЛГОРИТМ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ .............................................................8 3.1 Алгоритм функционирования контролируемого пункта.....................................................8 3.2 Алгоритм функционирования пункта управления ...............................................................8 4 РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ СИСТЕМЫ........................................................11 4.1 Структурная схема контролируемого пункта .....................................................................10 4.2 Структурная схема пункта управления ...............................................................................11 5 ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА СИСТЕМЫ ......................................11 5.1 Выбор элементной базы системы ........................................................................................11 5.2 Принципиальная электрическая схема контролируемого пункта ....................................13 5.3 Принципиальная электрическая схема пункта управления ..............................................13 6 РАСЧЕТНАЯ ЧАСТЬ...............................................................................................................14 6.1 Расчет частотных и временных параметров .......................................................................14 6.2 Выбор и расчет линии связи .................................................................................................15 7 СИСТЕМНЫЕ РАСЧЕТЫ .......................................................................................................16 7.1 Расчет помехоустойчивости .................................................................................................16 7.2 Спектр сигнала линии связи .................................................................................................17 7.3 Пропускная способность канала ..........................................................................................18 7.4 Расчет надежности.................................................................................................................18 8 РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ..........................................................20 8.1 Программное обеспечение КП .............................................................................................20 8.2 Программное обеспечение ПУ .............................................................................................24 Заключение...................................................................................................................................29 СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ .........................................................................31 3 4 ВВЕДЕНИЕ В курсовом проекте осуществлена реализация основных способов и методов построения современной, высоконадежной, быстродействующей системы сбора и передачи цифровой телеметрической информации. В общем случае системой телеизмерения называется совокупность телеизмерительных устройств на передающей и приемной сторонах и канала связи для автоматического измерения одного или ряда параметров на расстоянии. В связи со сравнительно высоким уровнем помех канала связи, а также из-за затухания сигнала в процессе передаче осуществляется согласование сигнала, получаемого с первичного преобразователя, с каналом связи путем кодирования и модуляции на передающем устройстве. Все устройства и системы телеизмерения подразделяются на аналоговые, в которых возможные значения измеряемого параметра представляет собой бесконечное множество и цифровые, значения измеряемого параметра в которых представлено в виде дискретной величины. Чтобы защитить передаваемую информацию от помех в телеметрических системах используют различного рода модуляции и кодирования. Специфическими особенностями телемеханики являются: – удалённость объектов контроля и управления; – необходимость высокой точности передачи измеряемых величин; – недопустимость большого запаздывания сигналов; – высокая надёжность передачи команд управления; – высокая степень автоматизации процессов сбора информации. Алгоритм работы проектируемой системы ТИТ циклический опрос по вызову в пределах КП. Всего в системе 7 контролируемых пунктов с 63 датчиками на каждом. Защита информации от помех производится кодом Хэмминга с d=4, передача производится методом КАМ-4. Курсовой проект состоит из восьми разделов. В первом разделе описывается область применения и описывается технологический процесс. Во втором разделе проекта осуществляется выбор структуры проектируемой системы, канала связи и структуры сигналов. Третий посвящен разработке общего алгоритма функционирования системы. В четвертом разделе на основании этого алгоритма разрабатывается структурная схема системы. В пятом разделе выбирается элементарная база и проектируются электрические схемы. В шестом выполняются расчеты временных и частотных параметров, а также линии связи. В седьмом – системные расчеты. В восьмом выполняется разработка программного обеспечения. 5 1 ОБЛАСТЬ ПРИМЕНЕНИЯ СИСТЕМЫ И ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА В разрабатываемом курсовом проекте выполняется телемеханизация промышленных теплиц с измерением температуры земли, температуры воздуха, освещения, влажности земли, влажности воздуха, содержание кислорода в воздухе. Контролируемый пункт представлен одной теплицей с тремя грядками. Пункт управления представлен тремя теплицами. В каждом контрольном пункте присутствует 3 датчика влажности воздуха, 3 датчика температуры воздуха, 6 датчиков кислорода в воздухе, 9 датчиков температуры земли, 6 датчиков освещенности, 36 датчиков влажности земли. Схема расположения датчиков представлена на листе 8 графического материала. Таблица 1.1– Перечень контролируемых параметров № Параметр Eд. изм. Обозначение параметра 1 Влажность грунта в грядке ВЛ1 г/м3 … 36 37 Влажность грунта в грядке Освещенность г/м3 Лм/см2 ВЛ36 ОС1 Лм/см2 ОС6 ТЗ1 … 42 43 Освещенность Температура земли ⁰С … 51 52 Температура земли Насыщенность воздуха кислородом ⁰С % ТЗ9 К1 … 57 58 59 60 60 62 63 Насыщенность воздуха кислородом Температура воздуха Температура воздуха Температура воздуха Влажность воздуха Влажность воздуха Влажность воздуха % ⁰С ⁰С ⁰С г/м3 г/м3 г/м3 К6 ТВ1 ТВ2 ТВ3 ВЛВ1 ВЛВ2 ВЛВ3 6 2 СТРУКТУРА СИСТЕМЫ 2.1 Выбор структуры системы В соответствии с техническим заданием, спроектируем следующую структурную схему системы телеизмерения. Структура данной системы будет приведена на рисунке 2.1. Данная система будет состоять из пункта управления и 7 контролируемых пунктов. На пункте управления будет осуществляется опрос и прием телеизмерений от КП, полученные измерения фиксируются дисплеем. Передача данных будет осуществляться с помощью модема. Устройства КП опрашивают датчики измерений и формируют посылки согласно заданному алгоритму. Рисунок 2.1 – Структурная схема системы телеизмерений 2.2 Выбор линии связи Системы телемеханики разделяются по характеру расположения объектов в пространстве на системы для сосредоточенных и рассредоточенных объектов. Объекты могут быть рассредоточены вдоль общей линии связи по площади или в пространстве. Для сосредоточенных объектов характерно то, что сам оператор и объекты управления расположены в двух раздельных пунктах: пункте управления (ПУ) и контролируемом пункте (КП) и соединены в единую систему управления с помощью аппаратуры телемеханики и канала связи. Все данные системы сводят к четырем основным видам: однолучевая (линейная), радиальная, радиально-узловая, древовидная. Целесообразно использовать однолучевую линию связи. Характерной особенностью однолучевой системы является то, что контролируемые пункты 7 расположены последовательно друг за другом, образуя однонаправленную цепочку, что упрощает процедуру опроса контролируемых пунктов. Структура однолучевой линии связи приведена на рисунке 2.2. Рисунок 2.2 – Однолучевая структура линии связи 2.3 Выбор структуры сигналов Согласно техническому заданию алгоритм работы системы ТИТ циклический опрос по вызову в пределах КП. ПУ по очереди опрашивает все КП, которые после запроса передают ТИТ со всех датчиков. Структура запроса с ПУ представлена на рисунке 2.3. СК АКП КС Рисунок 2.3 – Структура сигнала, посылаемого с ПУ на КП В его состав входят: СК – синхрокод состоит из восьми единиц, АКП – адрес опрашиваемого контролируемого пункта и КC – контрольные символы. В ответ на запрос КП будет передавать все данные поэтому посылка на ПУ будет состоять из синхрокода, адреса КП, данных ТИТ и кода конца. В соответствии с описанным выше, структура сигнала представлена на рисунке 2.4. КВ ДД1 КС1 ... ДД63 КС63 КК Рисунок 2.4 – Структура сигнала, посылаемого с КП на ПУ где КВ – квитанция; ДД1-ДД63 ТИТ от датчиков на КП; КС – контрольные символы, КК – код конца 8 3 АЛГОРИТМ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ 3.1 Алгоритм функционирования контролируемого пункта Согласно техническому заданию система должна работать по алгоритму ТИТ циклический опрос по вызову в пределах КП. В соответствии с этим алгоритм функционирования контролируемого пункта имеет вид, приведенный на листе 1 графического материала. Руководствуясь приведенным алгоритмом, порядок работы КП представлен ниже. КП работает по запросу. Устройство КП из линии связи принимает данные и анализирует их на предмет синхрокода. Если обнаруживается синхрокод, принимаются адрес контролируемого пункта и контрольные символы. После чего полученные данные декодируются из кода Хэмминга. Если обнаруживается ошибка, то устройство снова переходит к ожиданию синхрокода. Если ошибка не обнаружена, полученный адрес анализируется на соответствие данному КП. Если соответствует, то передаётся квитанция, соответствующая адресу КП. Далее начинается опрос датчиков. Устанавливается первый адрес датчика. Далее требуемый канал подключается к АЦП. Аналоговый сигнал АЦП преобразуется в двоичный код. Комбинация, соответствующая первому датчику, считывается из памяти устройство КП и передается на счетчики. Первый датчик отвечает, ответ принимает устройство КП, после чего из принятых данных выделяется код измерения. После чего полученный код кодируется в коде Хэмминга. После отправки измерения от первого датчика выполняется опрос и передача от остальных датчиков. После чего устройство КП переходит к ожиданию следующего запроса. Когда все датчики опрошены, то выполняется переход к ожиданию синхрокода. 3.2 Алгоритм функционирования пункта управления Алгоритм функционирования пункта управления имеет вид, приведенный на листе 2 графического материала. Устройство ПУ поочередно опрашивает все КП. Для чего сначала устанавливается первый адрес КП и обнуляется счетчик переспросов. Далее на КП передаётся синхрокод. Адрес опрашиваемого КП кодируется кодом Хэмминга, и вместе с контрольными символами передаётся в линию связи. После отправки запроса ПУ принимает квитанцию с КП. Квитанция проверяется. Если квитанция верна, на устройстве ПУ происходит дальнейшая обработка информации с датчиков. Если квитанция не верна, увеличивается счетчик переспросов. Если счетчик переспросов превышает значение 7, то формируется сигнал ошибки линии связи. После получения квитанции устанавливается первый адрес датчика, после чего принимается кодовая комбинация для датчика вместе с 9 контрольными символами. Комбинация декодируется из циклического кода. Если ошибка обнаружена, устройство переходит к обработке следующего датчика. Если ошибка не обнаружена, выполняется масштабирование и двоично-десятичная коррекция. При масштабировании величина с АЦП умножается или делится на заданный коэффициент, в результате получается абсолютная физическая величина измерения. Для каждого двоичнодесятичного символа определяется его код для отображения на цифровом приборе, в качестве которого выступает дисплей. Согласно таблице символов контроллера дисплея hd44780 десятичные цифры имеют коды 30h-39h, то есть старшая тетрада всегда содержит значение 3, а младшая двоично-десятичный код цифры. Поэтому для получения кодов, каждый двоично-десятичный символ записываем в отдельный байт и к нему прибавляем число 30h. Определяем начальную область ОЗУ контроллера дисплея, в которую необходимо записать коды символов. После чего коды записываются в полученную область памяти, и измерение отображается на дисплее. Далее проверяется номер датчика. Если адрес не равен 63, переход к приему кода измерения от следующего датчика. Когда приняты все измерения, устройство ПУ переходит к опросу следующего КП. Если все КП опрошены, возврат к первому КП. 10 4 РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ СИСТЕМЫ 4.1 Структурная схема контролируемого пункта В соответствии с разработанным алгоритмом контролируемого пункта, разработаем его структурную схему. Данная схема представлена на листе 3 графического материала. Запрос со стороны ПУ приходит на модем, где сигнал демодулируется. В последовательном виде поступает на микроконтроллер, где преобразуется в параллельный код соответствующим устройством. С принимаемых данных снимается М-последовательность, которая декодируются декодером из кода Хэмминга. Детектор запросов сравнивает опрашиваемый адрес с текущим адресом из регистра хранения адреса КП. Если адреса совпадают, то начинает работу блок управления. Для опроса датчиков блок управления выдает адрес на коммутатор. Ответ принимается блоком приема ответа. Из принятых данных выделяется код измерения и кодируется в код Хэмминга соответствующими блоками. Модулем наложения М-последовательности на закодированные измерения накладывается М-последовательность, далее преобразователем из параллельного кода в последовательный и модемом передается на ПУ. После отправки выполняется считывание и отправка измерений со следующего датчика, после чего блок управления переходит к ожиданию следующего запроса с ПУ. 4.2 Структурная схема пункта управления В соответствии с разработанным алгоритмом пункта управления, разработаем его структурную схему. Данная схема представлена на листе 4 графического материала. Устройство ПУ поочередно формирует запросы на все КП. Для чего блоком управления на счетчик КП подается сигнал. Счетчик КП генерирует очередной адрес и подает на формирователь запросов. Формирователь запросов создает запрос, состоящий из синхрокода и адреса КП, который преобразователем из параллельного кода в последовательный через модем передаётся в линию связи. При получении ответа от КП, данные через модем поступают на преобразователь из последовательного кода в параллельный и записываются в буфер. Данные из буфера декодируются из кода Хэмминга, соответствующим устройством. Из декодированной посылки выделяется квитанция (адрес ответившего КП), который подается на БУ. БУ сравнивает адреса опрашиваемого и ответившего КП. Если адреса совпали и в принятой комбинации не обнаружена ошибка, то БУ запускает устройство выделения ТИТ. Которое из принятой посылки выделяет поочередно все значения измерений, при этом при каждом очередном извлечении подается сигнал на счетчик каналов. Полученная величина масштабируется и передаётся на блок записи в ОЗУ дисплея. Данный блок преобразует значения в символьные коды и записывает их для отображения. 11 5 ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА СИСТЕМЫ 5.1 Выбор элементной базы системы Для реализации требуемых функций был выбран 8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением ATmega64. Характеристики микроконтроллера: RISC архитектура: – 130 высокопроизводительных команд, большинство команд выполняется за один тактовый цикл; – 32 8-разрядных рабочих регистра общего назначения; – полностью статическая работа; – производительность приближается к 16 MIPS (при тактовой частоте 16 МГц); – встроенный 2-цикловый перемножитель. Энергонезависимая память программ и данных: – 64 Кбайт внутрисистемно программируемой Flash памяти (In-System Self-Programmable Flash); – обеспечивает 1000 циклов стирания/записи; – дополнительный сектор загрузочных кодов с независимыми битами блокировки. Внутрисистемное программирование встроенной программой загрузки: – обеспечен режим одновременного чтения/записи (Read-While-Write); – 2 Кбайта EEPROM; – обеспечивает 100000 циклов стирания/записи; – 4 Кбайт встроенной SRAM; – до 64 Кбайтов пространства дополнительной внешней памяти; – программируемая блокировка, обеспечивающая защиту программных средств пользователя; – SPI интерфейс для внутрисистемного программирования пользователя. Интерфейс JTAG (совместимый с IEEE 1149.1): – возможность сканирования периферии, соответствующая стандарту JTAG; – расширенная поддержка встроенной отладки; – программирование через JTAG интерфейс: Flash, EEPROM памяти, перемычек и битов блокировки. Встроенная периферия: – два 8-разрядных таймера/счетчика с отдельным предварительным делителем, один с режимом сравнения; – два 16-разрядных таймера/счетчика, с расширенными возможностями, с отдельным предварительным делителем и режимами захвата и сравнения; – счетчик реального времени с отдельным генератором; – два 8-разрядных канала PWM; 12 – шесть каналов PWM с возможностью программирования разрешения от 1 до 16 разрядов; – 8-канальный 10-разрядный аналого-цифровой преобразователь; – 8 несимметричных каналов; – 7 дифференциальных каналов; – 2 дифференциальных канала с программируемым усилением в 1, 10 или 200 крат; – байт-ориентированный 2-проводный последовательный интерфейс; – сдвоенный программируемый последовательный USART; – последовательный интерфейс SPI (ведущий/ведомый); – интерфейс I2C; – программируемый сторожевой таймер с отдельным встроенным генератором; – встроенный аналоговый компаратор. Специальные микроконтроллерные функции: – сброс по подаче питания и программируемый детектор кратковременного снижения напряжения питания; – встроенный калиброванный RC-генератор; – внутренние и внешние источники прерываний; – шесть режимов пониженного потребления: Idle, Power-save, Powerdown, Standby, Extended Standby и снижения шумов ADC; – программная установка тактовой частоты; – режим обеспечения совместимости с ATmega103 (перемычки); – глобальный запрет подтягивающих резисторов. Для организации интерфейса RS232 используем драйвер RS232 MAX232A. В данной микросхеме имеется возможность организовать два канала. Напряжение питания 5 В. Также микросхема имеет защиту от перенапряжения величиной до 30 В. В качестве модема в проектируемой системе используем высокоскоростной универсальный модем ZuXEL U336. Подключение модема к микроконтроллеру осуществляется в синхронном режиме по стыку RS-232. Модем эксплуатируется в непрерывном и необслуживаемом режимах, работает в различных климатических условиях, введено управление режимами работы (двух или четырехпроводное подключение), для каждого типа линии оптимизирована схема защиты от грозовых и статических разрядов. Используются встроенные источники питания на различные виды первичного напряжения с расширенными диапазонами его изменения, по цепям первичного питания предусмотрена гальваническая развязка и защита по току. Максимальная потребляемая мощность модема лежит в диапазоне от 0.8 до 5 Вт. 13 5.2 Принципиальная электрическая схема контролируемого пункта Рассмотрим работу электрической принципиальной схемы КП, изображенной на листе 5 графического материала. Задачей устройства КП является опрос датчиков и передача получаемых параметров на ПУ. Передача посылок по линии связи осуществляется через модем DA6. В качестве модема используется законченное устройство, которое поддерживает ряд стандартов и протоколов, в которые также входит КАМ-4 модуляция. С микроконтроллера на модем передаётся побайтно посылка через последовательный интерфейс, при получении очередного байта модем автоматически начинает передачу. При приеме байта из линии связи модем передаёт его на микроконтроллер. Для согласования уровней сигналов модема (RS232) и микроконтроллера (TTL) используется преобразователь уровней DA5. Для фильтрации от высокочастотных помех используется фильтр нижних частот на операционном усилителе. С выхода фильтра сигнал поступает на вход АЦП. В системе используется микроконтроллер со встроенным 8-канальным 8-битным АЦП, чего согласно исходным (2 датчика) и расчетом (6 бит для обеспечения заданной точности измерения) достаточно для выполнения требований технического задания. 5.3 Принципиальная электрическая схема пункта управления Рассмотрим работу электрической принципиальной схемы ПУ изображенной на листе 6. Главным элементом КП является микроконтроллер DD1. К выводам XTAL1 и XTAL2 подключен кварцевый резонатор, определяющий тактовую частоту микропроцессора 4 МГц. Микроконтроллер DD1 формирует запросы на КП. В последовательном виде запрос передаётся на модем DA2, через преобразователь уровней DA1 с линии Txd. Ответ из линии связи поступает на модем, где демодулируется и в виде последовательности прямоугольных импульсов через преобразователь уровней поступает на вход последовательного интерфейса микроконтроллера (линия Rxd). Полученная посылка обрабатывается микроконтроллером в соответствии с приведенными ранее алгоритмами работы ПУ. Для индикации получаемых измерений используются ЖК-дисплеи DD2DD3, построенные на основе контроллера HD44780. Изображение на дисплее формируется в соответствии с кодами, записанными в ОЗУ контроллера HD44780. Каждая ячейка соответствует одному знакоместу на дисплее. Измерение с каждого датчика отображается на заданном для него месте дисплея. Обмен данными с ЖК модулями микроконтроллер осуществляет по порту РА. По линии А0 указывается тип данных: управляющее слово или данные. Сигнал R/W указывает операцию чтение или запись. С какой из микросхем осуществляется обмен определяется высоким уровнем на входе Е. 14 6 РАСЧЕТНАЯ ЧАСТЬ 6.1 Расчет частотных и временных параметров В соответствии с теоремой Котельникова, время, за которое необходимо опросить каждый датчик определяется по формуле 6.1: 𝑇= 1 (6.1) 5..10𝐹𝑚𝑎𝑥 где Fmax максимальная частота измерения телеметрируемого параметра. 1 1 Примем 𝑇 = = = 0.2с. 5∗𝐹𝑚𝑎𝑥 5∗1 Поскольку в проектируемой системе 7 КП, то число разрядов, необходимых для передачи адреса КП определяется по формуле 6.2: kакп = Еlog2 (7+1) = 3, (6.2) АКП кодируется в коде Хэмминга с d=4, число контрольных символов определяется как: rакп = Еlog2 ((3+1) + Еlog2 (3+1)) = 3, (6.3) Число информационных символов 𝑘и определяется из выражения для 50 приведенной погрешности 𝛿%прив = 𝑘 , откуда: 2 −1 50 𝑘и = 𝐸 𝑙𝑜𝑔2 ( 𝛿 + 1) = 𝐸 𝑙𝑜𝑔2 ( 50 0.8 + 1) = 6 (6.4) ДД кодируются в циклическом коде, число контрольных символов: rи = Еlog2 ((6+1) + Еlog2 (6+1)) = 3, (6.5) Длина посылки с КП на ПУ: 𝑁 = 𝑘кв + 𝑁𝑑 ⋅ (𝑘и + 𝑟и ) = (3 + 3) + 63 ⋅ (6 + 3) = 573, (6.6) где Nd = 63 – количество датчиков на КП. Поскольку данное время затрачивается на передачу данных от всех датчиков и передачу синхрокода, то длительность элементарного бита, определим по формуле 6.7: 𝑇 0.2 𝑇𝑏𝑖𝑡1 = = = 0.00005 с, (6.7) 𝑁 7⋅573 где N – длина посылки. 15 Соответственно частота передачи последовательного интерфейса вычисляется по формуле 6.8: (6.8) 𝑓пер = 1 𝑇𝑏𝑖𝑡1 = 1 0.00005 = 20000 𝑐 −1 , Принимаем стандартную скорость передачи Fп=28800 бод. Соответственно несущая для данной частоты модулирующего сообщения будет иметь частоту в 10 раз большую, т.е.: (6.9) 𝑓нес = 𝐹п ⋅ 10 = 288 КГц. 6.2 Выбор и расчет линии связи Каналом связи называется совокупность технических средств и тракта (среды, кабеля, проводной линии) для передачи сообщений на расстоянии. Передача по заданному каналу связи осуществляется независимо от других каналов. Каналы связи организуются в линии связи. По назначению каналы связи бывают: телефонные, телеграфные, фототелеграфные, телевизионные и др. По характеру эксплуатации: выделенные и коммутируемые. Проводные линии связи подразделяют на воздушные и кабельные. В данном проекте выбрана проводная линия связи. Телефонный кабель марки ТГ. Его параметры представлены в таблице 6.1. Таблица 6.1 – Параметры телефонного кабеля ТГ Диаметр Сопр. двух- Инд. двух- Емкость провода проводной проводной между цепи цепи проводами 0,5 мм 190 Ом/км 0,55 мГн/км 0,04 мкФ/км Коэффициент распределения: Волн. сопротивл. на f>2кГц 117 Ом Сопр. изоляции 2 МОм 𝛾 = √(𝑅 + 𝑗𝜔𝐿)(𝐺 + 𝑗𝜔𝐶) = 0.275 + 𝑗0.292 (6.9) где R – сопротивление двухпроводной цепи; ω – частота сигнала; L – индуктивность двухпроводной цепи; С – емкость между проводами; G – проводимость; Тогда коэффициент затухания в ЛС α=0,275 Нп. Следовательно, напряжение на передатчике: 𝑈1 = 𝑈2 /𝑒 𝛼 = 12/𝑒 0.275 = 9 В. 16 7 СИСТЕМНЫЕ РАСЧЕТЫ 7.1 Расчет помехоустойчивости Для передачи сигналов используется КАМ-4 модуляция. Рассчитаем величину, характеризующую потенциальную помехоустойчивость в соответствии с [3]: 𝛼2 = 1 𝑃0 𝜏 ∫0 (𝑈𝑐 𝑠𝑖𝑛 𝜔 𝑡 − 𝑈𝑐 𝑠𝑖𝑛( 𝜔𝑡 + 𝜑))2 𝑑𝑡 = 1.41⋅𝑈𝑐 2 ⋅𝜏 𝑃0 = 6, (7.1) где Uc, в напряжение на входе приемника, 𝜏 - длительность импульса при передаче, Ро – спектральная плотность шума Вт/Гц. Значение Ро задано в техническом задании и равно 5 ⋅ 10−2 Вт/Гц. Значение Uc выбираем из стандартного ряда [4]. Примем напряжение на входе приемника равным 9 В. Длительность импульса была рассчитана в пункте 6. Вероятность искажения элементарного сигнала будет: 𝛼 6 √ √ 𝑃1 = 𝑃10 = 𝑃01 = 𝑉 ( ) = 𝑉 ( ) = 𝑉(4.2) = 1.33 ∗ 10−5 , 2 2 (7.2) В системе используется защита от ошибок кодом Хэмминга с d=4. Согласно пункту 6 количество информационных символов n=9. Полную группу событий образуют вероятности правильного приема Рправ, возникновения обнаруженной ошибки Ро.ош., возникновения необнаруженной ошибки Рн.ош, т.е.: 𝑃прав + 𝑃о.ош + 𝑃н.ош = 1, (7.3) Вероятность обнаружения будет: 𝑃о.ош = 𝐶𝑛2 𝑃12 (1 − 𝑃1 )𝑛−2 = 𝐶92 𝑃12 (1 − 0.35)7 = 6 ∗ 10−9 , (7.4) Вероятность правильного приёма: 𝑃прав = (1 − 𝑃1 )9 + 𝐶19 𝑃11 (1 − 𝑃1 )8 = 0.99999, (7.5) Вероятность необнаруженной ошибки: 𝑃н.ош = 1 − 𝑃прав − 𝑃о.ош = 1 − 6 ∗ 10−9 − 0,99999 = 10−8 . (7.6) 17 Вероятность необнаруженной ошибки не превышает значение 10−5 , следовательно помехоустойчивость удовлетворяет требованиям технического задания. 7.2 Спектр сигнала линии связи Для передачи сигналов, согласно техническому заданию, используется модуляция КАМ-4. При равном числе точек в сигнальном созвездии спектр сигналов КАМ идентичен спектру сигналов ФМП. Поэтому расчет будем вести для ФМП с шагом изменения частоты Δϕ = 90⁰ и скважностью Q=2. Несущая частота 288 кГц, напряжение модема 9 В. 𝑈 √(𝑄 − 1 + 𝑐𝑜𝑠 𝛥 𝜑)2 + 𝑠𝑖𝑛2 𝛥 𝜑 𝑠𝑖𝑛 𝜔1 𝑡 + 𝑄 2𝑈 𝑠𝑖𝑛(𝜋𝑘/𝑄) 𝛥𝜑 + ∑∞ 𝑠𝑖𝑛 (𝑠𝑖𝑛( 𝜔1 + 𝑘𝛺)𝑡 + 𝑠𝑖𝑛( 𝜔1 − 𝑘𝛺)𝑡), 𝜋𝑘 𝑘=1 𝑈ФМП (𝑡) = 𝑄 𝑄 2 (7.7) Амплитуда несущей рассчитывается по выражению: 𝑈 𝑈ФМП (𝑡) = √(𝑄 − 1 + 𝑐𝑜𝑠 𝛥 𝜑)2 + 𝑠𝑖𝑛2 𝛥 𝜑, 𝑄 (7.8) Амплитуда боковых составляющих определяется: 𝜋𝑘 𝑈БОК = 2𝑈 𝑠𝑖𝑛( 𝑄 ) | 𝜋𝑘 𝑄 𝑄 𝑠𝑖𝑛 𝛥𝜑 2 |, (7.9) Рассчитаем для частоты F1 = 288 кГц. Скважность Q=2, f=28800Гц. Расчеты сведем в таблицу 7.1: Таблица 7.1 – Расчет составляющих спектра Составляющая Частота, кГц F1 288000 F1 f 288000 28800 F1 2f 288000 57600 F1 3f 288000 86400 F1 4f 288000 115200 Амплитуда 6.36 4.05 0 1.35 0 18 F+3f F+2f F+f F F-f F-2f F-3f Спектр модулированного сигнала изображен на рисунке 7.1: Рисунок 7.1 – Спектр модулированного сигнала Определим практическую полосу пропускания частот: 𝛥𝐹 = 2 ⋅ 𝑓 = 2 ⋅ 28800 = 57600 Гц. (7.10) 7.3 Пропускная способность канала В выбранном симметричном канале связи вероятности подавления и воспроизведения ложного сигнала одинаковы и равны 𝑃1 = 𝑃10 = 𝑃01 = 1.33 ∗ бит 10−5 . Техническая скорость передачи сигнала составляет 𝑓 ≈ 28800 . Тогда 𝑐 пропускная способность канала связи определяется по выражению: 𝐶 = 𝑓[1 + 𝑃1 𝑙𝑜𝑔 𝑃1 + (1 − 𝑃1 ) 𝑙𝑜𝑔( 1 − 𝑃1 )] = 28793 дв. ед./c. (7.11) 7.4 Расчет надежности Надежность – свойство изделия выполнять определенные задачи в определенных условиях эксплуатации, т.е. надежность есть внутреннее свойство изделия, включающее в свою очередь такие свойства, как безотказность, долговечность, ремонтопригодность и сохраняемость. В основе понятия надежности лежит понятие отказа. Отказом называется событие, заключающееся в нарушении работоспособности объекта. В практических расчетах вероятностью безотказной работы определяют по формуле: 𝑃 = 𝑒 −𝜆⋅𝑡 , (7.12) где t – заданное время работы изделия. 𝜆– интенсивность отказов системы 19 Произведем расчет количественных показателей надежности спроектированной системы. Данные для расчета занесем в таблицу 7.2 Таблица 7.2 – Расчет спроектированной системы количественных Тип элемента Цифровые интегральные микросхемы показателей λ, 1/час Кол-во, шт 33 2.5 ∗ 10−7 надежности λi, 1/час 8,25∗ 10−6 Конденсаторы керамические 8 ∗ 10−8 112 8,96∗ 10−6 Резисторы постоянные компазиционные Разъем штепсельный Кварцевые резонаторы Пайка ручная 5∗ 10−8 3∗ 10−9 5∗ 10−7 5∗ 10−10 2 32 16 1000 λсх= 1∗ 10−7 9,6∗ 10−9 8∗ 10−6 5∗ 10−7 2,58∗ 10−5 Наработка до отказа 𝑇0 = 1 𝜆сх = 1 2.58⋅10−5 = 40000ч. Вероятность безотказной работы при времени работы системы, равном 10000ч., будет: −5 𝑃 ≅ 2.71−2.58⋅10000⋅10 = 0.773, (7.13) Следовательно, вероятность отказа составит Q=1-P=1-0.773=0.227. (7.14) 20 8 РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ 8.1 Программное обеспечение КП Начало подпрограммы опроса. В R2 количество опрашиваемых датчиков (1FH). A1: MOV R2,#04H; MOV R1,#30H; MOV R0,#10H; A2: MOV @R0,#00H; INC R0; DJNZ R2,A2; MOV R2,#1FH; MOV R0,#10H; MOV R4,#01H; READ: MOV A,R4; MOV P1,A; // Выставление адреса коммутируемого датчика. MOVX A,@R0;// Запуск АЦП MOVX A,@R0// Чтение из выходного регистра АЦП. CLR ACC.0;///RR A; MOV R3,A; CLR C; SUBB A,@R1; JZ NEXT; MOV A,R3; MOV @R1,A; INC @R0; NEXT: INC R0; INC R1; INC R4; DJNZ R2,READ;// Проверка все ли датчики опрошены. MOV R0,#10H;//Были опрошены все датчики. MOV R2,#04H; CLR A; MOV R2, #1FH; MOV R0,#10H; MOV R1,#50H; MOV 0DH,R0; MOV 0FH,#00H; 21 MAX: MOV A,@R0; JZ NEXTDATA; MOV 0EH,R0; MOV R0,0DH; MOV A,@R0; SUBB A,@R1; SUBB A,0FH; MOV 0FH,A; JC NEXTDATA; MOV 70H,@R1; MOV 71H,0EH; NEXTDATA: INC R0; MOV 0DH,R0; MOV R0,0EH; INC R0; INC R1; DJNZ R2 MAX; MOV A,70H; MOV R2,#08H; ZDVIG: RRC A; JNC MX1; INC R3; MX1: DJNZ R2,ZDVIG; MOV A,71H; MOV R2,#05H; ZDVIGA: RRC A; JNC MX2; INC R3; MX2: DJNZ R2, ZDVIGA; MOV A,R3; JB ACC.0 NECHET; Формирование контрольных разрядов MOV A,71H; MOV 74H,A; MOV A,70H; ANL A,#1FH; ORL A,74H; MOV 74H,A; MOV A,70H; ANL A,#E0H; MOV 75H,A; JMP FORMPOS; Переход к формированию посылки. 22 NECHET: MOV A,71H;\\ Формирование контрольных CPL A; MOV 74H,A; MOV A,70H; CPL A; ANL A,#1FH; ORL A,74H MOV 74H,A; MOV A,70H; CPL A; ANL A,#E0H; M0V 75H,A; Сначала передается синхрокод, затем закодированные адрес датчика и данные. STBIT: MOV A,#0FFH; MOV SCON, #01000000B последовательного интерфейса. MOV TH1, #0F4H MOV TL1, #0F4H MOV TMOD, #00100000B SETB TR1 MOV SBUF,A;//PEREDACHA; PERED0: JNB TI,PERED0; DJNZ R0,STBIT; \\ Установка режима работы MOV R0,#04H; MOV R1,#72H; SLEDBAIT: MOV 2BH,R0; MOV 2CH,@R1; MOV R0,#08H; PODGOT: MOV 2EH,R0;//Выделение бита из закодированной информации MOV A,2CH; RRC A; MOV 2CH,A; JC ODIN; MOV 2DH,#00H;//ESLI BIT=0 JMP MPOSL; ODIN: MOV 2DH,#0FFH;///ESLI BIT=1 MPOSL: MOV R0,#08H;// MOV R2,#93H;////Начальные условия MOV R6,#00H; CLR A; METKA2: RR A; 23 MOV R6,A; MOV A,R2; MOV R4,#03H; CLR C; RR A; MOV R3,A; METKA1: MOV R5,A; MOV A,R3; RR A; RR A; MOV R3,A; XRL A,R5; DJNZ R4, METKA1; MOV C,ACC.0; MOV A,R2; MOV ACC.0,C; MOV C,ACC.7; RL A; MOV R2,A; CLR A; MOV ACC.7,C; ORL A,R6; MOV R6,A; DJNZ R0,METKA2; MOV A,2DH;///ZAGRYZKA 1 ILI 0; XRL A,R6; MOV SCON, #01000000B MOV TH1, #0F4H MOV TL1, #0F4H MOV TMOD, #00100000B SETB TR1 MOV SBUF,A;//PEREDACHA; PERED2: JNB TI,PERED2; MOV R0,2EH; DJNZ R0,PODGOT; MOV R0,2BH; DJNZ R0,SLEDBAIT;//Передача информационных байтов закончена. PERED3: JNB TI,PERED3; DJNZ R0,LASTBIT; END; 24 8.2 Программное обеспечение ПУ Задание начальных условий NY: MOV R2,#03H MOV R3,#01H; MOV R4,#02H; MOV R3,04H; MOV A,R3; CLR C; M0: JNB TI,M0; ACALL DELAY// Ожидание СИНХРОКОДА С КП MOV R4,#02H; SETB ES; M1: SETB EX0; LJMP M1; MOV A,SBUF; CLR C; SUBB A,#0FFH://Если принят синхрокод, то переходим приему информации JNZ RAZCOD; DJNZ R4,M1; MOV R1,#50H; MOV R2,#03H;//Загрузка счетчика принятых байтов. VIDBIT: MOV A,SBUF; MOV R3,#08H; MOV 0F0,R3H; RRC A; JNC NOL; MOV 1DH,#0FFH; NOL: MOV 10H,#00H; MOV R2,#93H; ////NACHALNIE YSLOVIA MOV R6,#00H; CLR A; METKA2: RR A; MOV R6,A; MOV A,R2; MOV R4,#03H; CLR C; RR A; MOV R3,A; METKA1: MOV R5,A; MOV A,R3; RR A; 25 RR A; MOV R3,A; XRL A,R5; DJNZ R4, METKA1; MOV C,ACC.0; MOV A,R2; MOV ACC.0,C; MOV C,ACC.7; RL A; MOV R2,A; CLR A; MOV ACC.7,C; ORL A,R6; MOV R6,A; DJNZ R0,METKA2; MOV A,10H; XRL A,R6; MOV R6,A; CLR C; SUBB A,#0FFH; JZ PRIN1; MOV A,R6; CLR C; SUBB A,#00H; JZ PRIN0; MOV R4,#00H; OPRED: MOV R5,#08H; MOV A,R6; RRC A; JNZ DALSHE; INC R4; DALSHE: DJNZ R5,OPRED MOV A,R4; CLR C; SUBB A,#04H; JC PRIN0; PRIN1: MOV A,@R1;//Если принятый бит равен 1 SETB C; RRC A; MOV @R1,A; MOV R3,0F0H; DJNZ R3,VIDBIT RET PRIN0: MOV A,@R1; Если принятый бит равен 0 26 CLR C; RRC A; MOV @R1,A; MOV R3,0F0H; DJNZ R3,VIDBIT RET NEXT1: INC R1; DJNZ R2,M2;// Принята вся информация? JMP RAZCODOSN;//Переход к декодированию основной информации. RAZCODOSN: MOV R1,#50H; MOV A,70H; MOV R2,#08H; ZDVIG1: RRC A; JNC MX1; INC R3; MX11: DJNZ R2,ZDVIG1; MOV A,71H; MOV R2,#05H; ZDVIGA1: RRC A; JNC MX2; INC R3; MX21: DJNZ R2, ZDVIGA1; MOV A,R3; JB ACC.0 NECHET1; MOV R1,#50H MOV A,@R1; XRL A,52H; JNZ BRACK; CLR A; MOV A,51H; 0RL A,#0FH\\ВЫДЕЛЕНИЕ СТАРШЕЙ ТЕТРАДЫ. MOV R3,A; MOV A,51H; 0RL A,#F0H\\ВЫДЕЛЕНИЕ МЛАДШЕЙ ТЕТРАДЫ. SWAP A; XRL A,R3; JNZ BRACK; JMP DECOD; \\ Переход к декодированию DECOD: \\ Декодирование принятой информации 27 MOV A,50H; ORL A,#1FH;\\\ информационных битов. CLR ACC.4 CLR ACC.3 CLR ACC.2 CLR ACC.1 CLR ACC.0 MOV 30H,A; MOV A,51H; ORL A,#F0H\\\ информационных битов. RL A; CLR ACC.7 CLR ACC.6 CLR ACC.5 ORL A,30H; MOV 30H,A;\\ Декодированные данные в 30-й ячейке памяти. MOV A,50H; ORL A,#E0H; CLR ACC.7 CLR ACC.6 CLR ACC.5 MOV 31H,A; \\Вывод информации на индикацию. VIVOD: MOV A,31H; JNB ACC.0 VIVOD1; MOV A,R4; MOV P1.0.ACC.0;//Вывод адреса датчика MOV P1.1.ACC.1; MOV P1.2.ACC.2; MOV P1.3.ACC.3; MOV P1.4.ACC.4; MOV A,30H; VICHISL: ACALL DIV10: // Преобразование в двоично-десятичный код. MOV R5,A; MOV A,R5; MOV P2,A;//Вывод старшего разряда MOV A,R3; ACALL DIV 10; SWAP A; ORL A,R5;/// MOV P2.4,ACC.4;//Вывод младшего разряда MOV P2.5,ACC.5 MOV P2.6,ACC.6 MOV P2.7,ACC.7 BRACK: JMP NY; 28 END; DIV10: MOV R3, #00H;//Подпрограмма преобразования десятичный код. M10: ADD A,#F6H; INC R3; JC M10; DEC R3;///В В R3 число десятков и единиц. ADD A, #0AH; RET; DELAY: MOV R2,#FFH;\\Реализация задержки. DD1: MOV R3,#FFH; DD2: NOP DJNZ R3,DD2 DJNZ R3,DD1; RET в двоично- 29 Заключение В процессе проектирования была разработана цифровая телеметрическая система, работающая по алгоритму ТИТ циклический опрос по вызову в пределе КП. Система обладает такими ценными свойствами как, хорошее качество, большая скорость приема-передачи сообщений, высокая степень автоматизации (в особенности процессов обработки), надежность, гибкость. В соответствии с заданием был разработан алгоритм функционирования системы, на его основании построена функциональная схема. Ядром системы являются однокристальный микроконтроллер, что позволяет в одном устройстве объединить несколько блоков, выполняющих различные логические функции и значительно сократить количества используемых микросхем. Далее была разработана принципиальная электрическая схема системы. Рассчитана помехоустойчивость, пропускная способность канала, надежность. По данному показателю система удовлетворяет заданному критерию достоверности и показывает эффективность используемого кода. Разработано программное обеспечение для ПУ и КП и проверена его работоспособность. Следует также отметить, что применение программной реализации большей части алгоритмов делает систему ее еще более гибкой к последующим усовершенствованиям и совершенной. В качестве путей совершенствования системы можно рассматривать применение более функциональных узлов, улучшение программного обеспечения (разработки более совершенных алгоритмов, например, дополнительный механизм шифрования и дешифрования для увеличения конфиденциальности информации – в том случае если будут разработаны беспроводные линии связи), а также, в связи с этим, применение помехозащищенного кода, позволяющего не только обнаруживать, но и исправлять ошибки. Также может быть проведена унификация протоколов обмена между ПУ и КП для возможности интеграции с другими системами. В частности, это может быть промышленный протокол Modbus. 30 СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ 1. Сорока Н.И., Кривинченко Г.А. Телемеханика: Конспект лекций. Ч.1: Сообщения и сигналы. Мн.: БГУИР, 2000. – 126 с. 2. Сорока Н.И., Кривинченко Г.А. Телемеханика: Конспект лекций. Ч.2: Коды и кодирование. Мн.: БГУИР, 2001. – 168 с. 3. Сорока Н.И., Кривинченко Г.А. Телемеханика: Конспект лекций. Ч.3: Линии связи и помехоустойчивость информации. Мн.: БГУИР, 2004. – 130 с. 4. Сорока Н.И., Кривинченко Г.А. Телемеханика: Конспект лекций. Ч.4: Системы телемеханики. Мн.: БГУИР, 2005. – 154 с. 5. Сорока Н.И., Кривинченко Г.А. Телемеханика: Конспект лекций. Ч.5: Технологии передачи дискретной информации. Электронный вариант. 6. Богданович М.Н. и др. Цифровые интегральные микросхемы: Справочник. Мн.: Беларусь, 1991.492с. 31