See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/285904716
Switched systems based on unstable dissipative systems**This work received
financial support from CONACYT through project No. 181002.
Article in IFAC-PapersOnLine · December 2015
DOI: 10.1016/j.ifacol.2015.11.021
CITATIONS
READS
2
155
1 author:
Eric Campos-Cantón
Instituto Potosino de Investigación Científica y Tecnológica
123 PUBLICATIONS 1,223 CITATIONS
SEE PROFILE
Some of the authors of this publication are also working on these related projects:
Special Issue Call for Papers View project
Patents: Non-linear dynamics and chaotic behavior View project
All content following this page was uploaded by Eric Campos-Cantón on 10 February 2016.
The user has requested enhancement of the downloaded file.
4th IFAC Conference on Analysis and Control of Chaotic Systems
4th
IFAC26-28,
Conference
on Analysis
Control of Chaotic Systems
August
2015. Tokyo,
Japan and
4th IFAC
IFAC Conference
Conference
on Analysis
Analysis
and Control of Chaotic Systems
4th
on
August 26-28,
2015. Tokyo,
Japan and Control of Chaotic Systems
Available online at www.sciencedirect.com
August
August 26-28,
26-28, 2015.
2015. Tokyo,
Tokyo, Japan
Japan
ScienceDirect
IFAC-PapersOnLine 48-18 (2015) 116–121
Switched
systems
based on
unstable
Switched
systems
on
unstable
Switcheddissipative
systems based
based
on
unstable
systems
dissipative
systems
dissipative systems
∗
E. Campos-Cantón ∗
E.
Campos-Cantón ∗∗
E.
E. Campos-Cantón
Campos-Cantón
∗
∗ División de Matemáticas Aplicadas, Instituto Potosino de
División de
Matemáticas
Aplicadas,
Instituto
de
∗
Investigación
y Tecnológica
A.C.,
CaminoPotosino
a la Presa
∗ DivisiónCientı́fica
de
Aplicadas,
Instituto
Potosino
de
DivisiónCientı́fica
de Matemáticas
Matemáticas
Aplicadas,
Instituto
Potosino
de San
Investigación
y
Tecnológica
A.C.,
Camino
a
la
Presa
San
José
2055
col.
Lomas
4a
Sección,
78216,
San
Luis
Potosı́,
SLP,
Investigación
Cientı́fica
y
Tecnológica
A.C.,
Camino
a
la
Presa
San
Investigación
Cientı́fica
y Tecnológica
A.C.,San
Camino
a la Presa
San
José
2055
col.
Lomas
4a
Sección,
78216,
Luis
Potosı́,
SLP,
México.
(e-mail:
eric.campos@ipicyt.edu.mx)
José 2055
2055 col.
col. Lomas
Lomas 4a
4a Sección,
Sección, 78216,
78216, San
San Luis
Luis Potosı́,
Potosı́, SLP,
SLP,
José
México.
(e-mail:
eric.campos@ipicyt.edu.mx)
México.
México. (e-mail:
(e-mail: eric.campos@ipicyt.edu.mx)
eric.campos@ipicyt.edu.mx)
Abstract: In this work we present an unified theory of how to yield multi-scroll chaotic
Abstract:
In
this
we
present
an
unified
theory
of
to
yield multi-scroll
chaotic
attractors based
on work
step function,
saturation,
hysteresis
andhow
deterministic
Brownian motion.
Abstract:
In
work
we
an
theory
how
to
chaotic
Abstract:
In this
this
work
we present
present
an unified
unified
theory of
of
how
to yield
yield multi-scroll
multi-scroll
chaotic
attractors
based
on
step
function,
saturation,
hysteresis
and
deterministic
Brownian
motion.
This
class
of
systems
is
constructed
with
a
switching
control
law
by
changing
the
equilibrium
attractors
based
on
step
function,
saturation,
hysteresis
and
deterministic
Brownian
motion.
attractors
based
on
step
function,
saturation,
hysteresis
and
deterministic
Brownian
motion.
This
systems
is
with
aa switching
control
law
by
changing
the
equilibrium
point class
of anof
system.
switching
control
governs
position
This
class
ofunstable
systems dissipative
is constructed
constructed
with The
switching
control
lawlaw
by that
changing
the the
equilibrium
This
class
of
systems
is
constructed
with
a switching
control
law
by
changing
the
equilibrium
point
of
an
unstable
dissipative
system.
The
switching
control
law
that
governs
the
of
the
equilibrium
point
changes
according
to
the
number
of
scrolls
that
is
displayed
in the
point of
of an
an unstable
unstable dissipative
dissipative system.
system. The
The switching
switching control
control law
law that
that governs
governs the
the position
position
point
position
of
the
equilibrium
point
changes
according
to
the
number
of
scrolls
that
is
displayed
in
the
attractor.
of
the
equilibrium
point
changes
according
to
the
number
of
scrolls
that
is
displayed
in
of
the equilibrium point changes according to the number of scrolls that is displayed in the
the
attractor.
attractor.
attractor.
©
2015, IFAC (International Federation of Automatic Control) Hosting by Elsevier Ltd. All rights reserved.
Keywords: Chaos theory; switching functions; system design; piecewise linear analysis;
Keywords:
theory;
multi-scroll
attractors.
Keywords: Chaos
Chaos
theory; switching
switching functions;
functions; system
system design;
design; piecewise
piecewise linear
linear analysis;
analysis;
Keywords:
Chaos
theory;
switching
functions;
system
design;
piecewise
linear
analysis;
multi-scroll
attractors.
multi-scroll attractors.
attractors.
multi-scroll
1. INTRODUCTION
in space using a step function. Lü et al. (2004 A); Deng
1.
INTRODUCTION
in
space
using
aa step
function.
Lü
etusing
al.
(2004
A);
Deng
&
Lü
(2007)
an approach
hysteresis
that
1.
INTRODUCTION
in
space
using
Lü
al.
A);
1. INTRODUCTION
in
space
usingpresented
a step
step function.
function.
Lü et
etusing
al. (2004
(2004
A); Deng
Deng
&
Lü
(2007)
presented
an
approach
hysteresis
that
Switched systems have been widely used in many different enables
the
creation
of
1D
n-scrolls,
2D
n
×
m-grid
scrolls
&
Lü
(2007)
presented
an
approach
using
hysteresis
that
&
Lü (2007)
presented
an n-scrolls,
approach 2D
using
hysteresis
that
Switched
systems
have
been
widely
used
in
many
different
enables
the
creation
of
1D
n
×
m-grid
scrolls
areas
in
science.
Some
recent
analysis
have
been
made
3D
n
×
m
×
l-grid
scrolls
chaotic
attractors.
Switched systems
systems have
have been
been widely
widely used
used in
in many
many different
different and
enables
the
creation
of
1D
n-scrolls,
2D
n
×
m-grid
scrolls
Switched
enables
the
creation
of 1D
n-scrolls,
2D
n × m-grid scrolls
areas
in
science.
Some
recent
analysis
have
been
made
and
3D
n
×
m
×
l-grid
scrolls
chaotic
attractors.
regarding
their stability
(See analysis
Chiou ethave
al. (2010);
Ma and
areas
in science.
science.
Some recent
recent
analysis
have
been made
made
andthis
3D n
nwork,
×m
m×
×
l-grid
scrolls
chaotic
attractors.
areas
in
Some
been
3D
×
scrolls
attractors.
wel-grid
present
a chaotic
generalized
theory that is
regarding
their
stability
(See
Chiou
et
al.
(2010);
Ma
&
Zhao
(2010);
Aleksandronov
et
al.
(2011),
and
the In
regarding
their
stability
(See
Chiou
et
al.
(2010);
Ma
In
this
work,
we
present
a
generalized
theory
that
is
regarding
their
stability
(See
Chiou
et
al.
(2010);
Ma
capable
of
explaining
different
approaches
as saturation,
&
Zhao
(2010);
Aleksandronov
et
al.
(2011),
and
the
In
this
work,
we
present
a
generalized
theory
that
In this of
work,
we present
a generalized
theory
that is
is
references
therein).
There is someet
in generating
&
Zhao (2010);
(2010);
Aleksandronov
etinterest
al. (2011),
(2011),
and the
the capable
explaining
different
approaches
as
saturation,
3
&
Zhao
Aleksandronov
al.
and
threshold
and
step
functions
in
ℜ
.
This
class
of
systems
references
therein).
There
is
some
interest
in
generating
capable of
of explaining
explaining different
different approaches
approaches
as saturation,
saturation,
3
as
chaotic or hyperchaotic
attractors
multiple
scroll with capable
references
therein). There
There
is some
somewith
interest
in generating
generating
threshold
and
step
functions
in
ℜ
.
This
class
of
systems
references
therein).
is
interest
in
3
constructed
withfunctions
unstable in
systems
(UDS)
chaotic
attractors
multiple
scroll
threshold
and
ℜ
of
threshold
and step
step
functions
indissipative
ℜ3 .. This
This class
class
of systems
systems
this kindor
systems. Since
the workwith
reported
by Suykens
& is
chaotic
orofhyperchaotic
hyperchaotic
attractors
with
multiple
scroll with
with
is
constructed
with
unstable
dissipative
systems
(UDS)
chaotic
or
hyperchaotic
attractors
with
multiple
scroll
with
(Campos-Cantón
et
al.,
2010)
and
a
control
law
to
display
this
kind
of
systems.
Since
the
work
reported
by
Suykens
&
is
constructed
with
unstable
dissipative
systems
(UDS)
is constructed with
unstable
dissipative
systems
(UDS)
Vandewalle
(1993) about
scroll from
Chua’s
this
kind of
of systems.
systems.
Sincen-Double
the work
work reported
reported
by the
Suykens
& (Campos-Cantón
et
al.,
2010)
and
a
control
law
to
display
this
kind
Since
the
by
Suykens
&
various
multi-scroll
strange
attractors.
The
multi-scroll
Vandewalle
(1993)
about
n-Double
scroll
from
the
Chua’s
(Campos-Cantón
et
al.,
2010)
and
a
control
law
to
display
(Campos-Cantón
et
al.,
2010)
and
a
control
law
to
display
system(Chua
et
al.,
1986;
Madan
,
1993),
there
have
been
Vandewalle
(1993)
about
n-Double
scroll
from
the
Chua’s
various
multi-scroll
strange
attractors.
The
multi-scroll
Vandewalle (1993)
about n-Double
scroll from
the Chua’s
strange
fromattractors.
the combination
of several
system(Chua
al.,
,, 1993),
there
been
various attractors
multi-scrollresult
strange
attractors.
The multi-scroll
multi-scroll
multi-scroll
strange
The
many differentet
to yield
multi-scroll
attractors
system(Chua
etapproaches
al., 1986;
1986; Madan
Madan
1993),
there have
have
been various
strange
attractors
result
from
the
combination
of
several
system(Chua
et
al.,
1986;
Madan
, 1993),
there
have
been
unstable
“one-spiral”
trajectories
by
means
of
a
switching
many
different
approaches
to
yield
multi-scroll
attractors
strange
attractors
result
from
the
combination
of
several
attractors
result
from theby
combination
of
several
in thedifferent
last coupled
decades.
Thesemulti-scroll
approachesattractors
may be strange
many
different
approaches
to yield
yield
multi-scroll
attractors
unstable
“one-spiral”
trajectories
means
of
a
switching
many
approaches
to
given
by
the
control
law.
Without
loss
of
generality
we
in
the
last
coupled
decades.
These
approaches
may
be
unstable
“one-spiral”
trajectories
by
means
of
a
switching
unstable
“one-spiral”
trajectories
by
means
of
a
switching
ranged
from
modifying
the
Chua’s
system
by
replacing
the
in
the
last
coupled
decades.
These
approaches
may
be
by
the
control
law.
Without
loss
of
generality
we
in
the from
last coupled
decades.
These
approaches
may the
be given
focus
our
study
to
the
simple
jerk
equation
and
a
switchranged
modifying
the
Chua’s
system
by
replacing
given
by
the
control
law.
Without
loss
of
generality
we
given
by
the
control
law.
Without
loss
of
generality
we
nonlinear
part
with different
nonlinear
functions
(Suykens
ranged
from
modifying
the Chua’s
Chua’s
system
by replacing
replacing
the focus our study to the simple jerk equation and a switchranged
from
modifying
the
system
by
the
ing
control
law
to
generate
PWL
systems
that
produce
nonlinear
part
with
different
nonlinear
functions
(Suykens
focus
our
study
to
the
simple
jerk
equation
and
a
switchfocus
our
study
to
the
simple
jerk
equation
and
a
switch&
Vandewalle,
1993;
Suykens
et
al.,
1997;
Yalçin
et
al.,
nonlinear part
part with
with different
different nonlinear
nonlinear functions
functions (Suykens
(Suykens ing control law to generate PWL systems that produce
nonlinear
multiscroll
&
Vandewalle,
Suykens
et
1997;
et
control
law
ing
control attractors.
law to
to generate
generate PWL
PWL systems
systems that
that produce
produce
2000;
Tang et al.1993;
, 2001),
to the use
of nonsmooth
nonlinear
&
Vandewalle,
1993;
Suykens
et al.,
al.,
1997; Yalçin
Yalçin
et al.,
al., ing
multiscroll
attractors.
&
Vandewalle,
1993;
Suykens
et
al.,
1997;
Yalçin
et
al.,
2000;
Tang
et
al.
,
2001),
to
the
use
of
nonsmooth
nonlinear
multiscroll
attractors.
multiscroll
attractors.
functions
such
as,
hysteresis
(Lü
et
al.
,
2004
A;
Deng
&
2000;
Tang
et
al.
,
2001),
to
the
use
of
nonsmooth
nonlinear
This
paper
is
organized
as
follow:
In
Section
2,
we
intro2000;
Tangsuch
et al.as,
, 2001),
to the(Lü
useetof al.
nonsmooth
nonlinear
functions
hysteresis
,, Sánchez-López
2004
A;
Deng
&
This
paper
is
organized
as
follow:
In
Section
2,
we
introLü,
2007),
saturation
(Lü
et
al.,
2004
B;
et
functions
such
as,
hysteresis
(Lü
et
al.
2004
A;
Deng
&
duce
the
UDS
theory
to
explain
the
generation
of
multiThis
paper
is
organized
as
follow:
In
Section
2,
we
introfunctions
such
as, hysteresis
(Lü2004
et al.
, Sánchez-López
2004 A; Deng et
& This
paper
is organized
as
follow:the
In generation
Section 2, we
introLü,
2007),
saturation
(Lü
et
al.,
B;
duce
the
UDS
theory
to
explain
of
multial.,
2010),
threshold
and
step
functions
(Lü,
Murali
et
al.,
Lü, 2007),
2007), saturation
saturation (Lü
(Lü et
et al.,
al., 2004
2004 B;
B; Sánchez-López
Sánchez-López et
et scrolls
attractors,
along
with
some
examples
using
the
duce
the
UDS
theory
to
explain
the
generation
of
multiLü,
duce the
UDS theory
to explain
the generation
of multial.,
2010),
threshold
and
step
functions
(Lü,
Murali
et
al.,
scrolls
attractors,
along
with
some
examples
using
2008;
Elwakil
et al., and
2000;
Yalçin
et al.,(Lü,
2002;
Yu et
al.,
2010),
threshold
and
step
functions
(Lü,
Murali
et al.,
al., jerky
equation.
In along
Sectionwith
3 we
use examples
the UDS using
theorythe
to
scrolls
attractors,
along
with
some
examples
using
the
al.,
2010),
threshold
step
functions
Murali
et
scrolls
attractors,
some
the
2008;
Elwakil
et
al.,
2000;
Yalçin
et
al.,
2002;
Yu
et
al.,
jerky
equation.
In
Section
33 as
we
use
the
UDS
theory
to
2005;
Lü
et
al.,
2003;
Qiang
&
Xin,
2006;
Xie
et
al.,
2008;
2008;
Elwakil
et
al.,
2000;
Yalçin
et
al.,
2002;
Yu
et
al.,
generate
different
approaches
step
function,
saturation
jerky
equation.
In
Section
we
use
the
UDS
theory
2008;
Elwakil
et2003;
al., 2000;
Yalçin
et2006;
al., 2002;
Yu
et2008;
al., jerky
equation.
Inapproaches
Section 3 as
we step
use function,
the UDS saturation
theory to
to
2005;
Lü
et
al.,
Qiang
&
Xin,
Xie
et
al.,
generate
different
Campos-Cantón
et al.,Qiang
2008,&
2005; Lü
Lü et
et al.,
al., 2003;
2003;
Qiang
&2010).
Xin, 2006;
2006; Xie
Xie et
et al.,
al., 2008;
2008; and
hysteresis.
In approaches
Section 4 we
present
a mechanism
for
generate
different
as
step
function,
saturation
2005;
Xin,
generate
different
approaches
as
step
function,
saturation
Campos-Cantón
et
al.,
2008,
2010).
and
hysteresis.
In
Section
44 we
present
Campos-Cantón
etwith
al., piecewise
2008, 2010).
2010).
motion
generation
terms aaaof mechanism
UDS, and for
in
and
In
present
mechanism
for
Campos-Cantón
al.,
2008,
and hysteresis.
hysteresis.
In Section
Section
4 we
wein
present
mechanism
for
It
is known that et
linear functions one can Brownian
Brownian
motion
generation
in
terms
of
UDS,
and
in
Section
5
we
draw
conclusions.
It
is
known
that
with
piecewise
linear
functions
one
can
Brownian
motion
generation
in
terms
of
UDS,
and
in
Brownian
motion
generation
in
terms
of
UDS,
and
in
achieve
the
generation
of
multiscroll
chaotic
attractors,
It is
is known
known that
that with
with piecewise
piecewise linear
linear functions
functions one
one can
can Section 5 we draw conclusions.
It
achieve
the
generation
of
multiscroll
chaotic
attractors,
Section
55 we
draw
conclusions.
Section
we
draw
conclusions.
which
are
based
on
the
location
of
the
equilibrium
points
achieve
the
generation
of
multiscroll
chaotic
attractors,
achieve
the generation
of multiscroll
chaotic attractors,
which
are
on
the
the
points
2. SWITCHED SYSTEMS BASED ON UNSTABLE
introduced
to the
alongof
the commutation
which
are based
based
on system
the location
location
ofwith
the equilibrium
equilibrium
points
which
are
based
on
the
location
of
the
equilibrium
points
2.
SWITCHED
SYSTEMS
BASED
ON
UNSTABLE
introduced
to
the
system
along
with
the
commutation
DISSIPATIVE
SYSTEMS
2.
SYSTEMS
ON
law or threshold
bounds
and gives a
introduced
to the
the that
system
alongthe
withscrolls
the commutation
commutation
2. SWITCHED
SWITCHED
SYSTEMS BASED
BASED
ON UNSTABLE
UNSTABLE
introduced
to
system
along
with
the
DISSIPATIVE
SYSTEMS
law
or
threshold
that
bounds
the
scrolls
and
gives
a
DISSIPATIVE
specific
the bounds
flow. The
about
law
or direction
threshold tothat
that
bounds
themultiple
scrolls papers
and gives
gives
a
DISSIPATIVE SYSTEMS
SYSTEMS
law
or
threshold
the
scrolls
and
a
specific
direction
to
flow.
multiple
papers
this topic
have been
different
ideasabout
and We consider the class of affine linear system given by
specific
direction
to the
thepresented
flow. The
Theas
multiple
papers
about
specific
direction
to
the
flow.
The
multiple
papers
about
consider the
class of
affine linear
system given
by
this
topic
have
been
presented
as
different
ideas
and
several
theories
have
been
developed
to
explain
how
to We
We
this
topic
have
been
presented
as
different
ideas
and
We consider
consider the
the class
classχ̇of
of=affine
affine
linear
system given
given by
by (1)
Aχ +linear
B, system
this
topic
have have
been been
presented
as different
ideas
and
several
theories
developed
to
explain
how
to
χ̇
=
Aχ
+
B,
(1)
generatetheories
multi-scroll
attractors. to
A natural
several
theories
havechaotic
been developed
developed
to
explainquestion
how to
to
several
have
been
explain
how
χ̇
=
Aχ
+
B,
(1)
generate
multi-scroll
chaotic
attractors.
A
natural
question
(1)
TAχ + B,
n
is the following:
is there
a theory
thatA
these where χ = [x1 , . . . ,χ̇x=
generate
multi-scroll
chaotic
attractors.
Aexplains
natural all
question
]
∈
ℜ
is
the
state
variable,
generate
multi-scroll
chaotic
attractors.
natural
question
n T
n
is
the
following:
is
there
a
theory
that
explains
all
these
where
χ
=
[x
,
.
∈
ℜ
is
the
state
variable,
T. . , xn ]n
approaches
as
one?
For
example,
Yalçin
et
al.
(2002),
T
n
1
is
the
following:
is
there
a
theory
that
explains
all
these
B = [βχ
.=
. . , [x
β1n,,]..T.. ..∈,, x
ℜ
real
vector,
A =
T stands
is
the following:
is there
aexample,
theory that
explains
all(2002),
these where
∈
is
state
variable,
n ]]n
χ11 ,,n×n
∈ ℜ
ℜn for
is aathe
the
state
variable,
approaches
as
Yalçin
et
1n ]T ∈xℜ
n
B
=
[β
..=
.. .. ,, [x
β
stands
for
real
vector,
A
=
reported that
1D, For
2D and
3D-grid
of scrolls
be where
n
approaches
as aone?
one?
For
example,
Yalçin
et al.
al. may
(2002),
[α
]
∈
ℜ
denotes
operator.
Considering
that
T ∈ aℜlinear
n stands
approaches
as
one?
For
example,
Yalçin
et
al.
(2002),
B
=
[β
,
β
]
for
a
real
vector,
=
ij
1
n
n×n
B
=] ∈[βℜ
. . . , denotes
βn ] ∈ aℜlinear
stands
for a real
vector, A
A
=
reported
that
aa 1D,
2D
and
3D-grid
of
scrolls
may
be
1 ,n×n
[α
operator.
Considering
that
introduced
locating
them
around
the
equilibrium
points
ij
reported
that
1D,
2D
and
3D-grid
of
scrolls
may
be
matrix
A
is
not
singular
then
the
equilibrium
point
is
n×n
reported that
a 1D,them
2D and
3D-grid
of scrolls may
be [α
[αij
]
∈
ℜ
denotes
a
linear
operator.
Considering
that
]
∈
ℜ
denotes
a
linear
operator.
Considering
that
introduced
locating
around
the
equilibrium
points
ij
matrix
A
is
not
singular
then
the
equilibrium
point
is
∗
−1
introduced
locating
them around
around
the
equilibrium
points matrix
⋆
located
at
χ
=
−A
B.
The
dynamics
of
the
system
is
introduced
them
points
A
is
not
singular
then
the
equilibrium
point
This work locating
received financial
support the
from equilibrium
CONACYT through
∗ not singular
−1
matrix
A
is
thendynamics
the equilibrium
point is
is
⋆ This work received financial support from CONACYT through
located
at
χ
=
−A
B.
The
of
the
system
∗
−1
⋆ This No.
given
byat
matrix
due
define
a vector field
Ax.system
Suppose
project
181002.
∗ =A
−1to
located
χ
−A
B.
The
dynamics
of
the
is
work
received
financial
support
from
CONACYT
through
⋆
located
at
χ
=
−A
B.
The
dynamics
of
the
system
is
This
work
received
financial
support
from
CONACYT
through
given
by matrix
A due
to define
a vector field
Ax. Suppose
project No. 181002.
given
project
given by
by matrix
matrix A
A due
due to
to define
define aa vector
vector field
field Ax.
Ax. Suppose
Suppose
project No.
No. 181002.
181002.
Copyright
© 2015,
2015 IFAC
116 Hosting by Elsevier Ltd. All rights reserved.
2405-8963 ©
IFAC (International Federation of Automatic Control)
Copyright
© 2015 IFAC
116
Copyright
©
2015
IFAC
116
Peer
review
under
responsibility
of
International
Federation
of
Automatic
Copyright © 2015 IFAC
116Control.
10.1016/j.ifacol.2015.11.021
IFAC CHAOS 2015
August 26-28, 2015. Tokyo, Japan
E. Campos-Cantón et al. / IFAC-PapersOnLine 48-18 (2015) 116–121
that the matrix A has j negative eigenvalues λ1 , . . . , λj and
n−j positive eigenvalues λj+1 , . . . , λn . Let {v1 , . . . , vn } be
the corresponding set of eigenvectors. Then the stable and
unstable subspaces of the affine linear system (1), E s and
E u , are the linear subspaces spanned by {v1 , . . . , vj } and
{vj+1 , . . . , vn }, respectively; i.e.,
E s = Span{v1 , . . . , vj },
E u = Span{vj+1 , . . . , vn}.
According to the above discussion and considering real
and complex eigenvalues, it is possible to define a UDS
as follows:
Definition 1. A system given by (1) in ℜn and eigenvalues
λi ,∑
with i = 1, . . . , n. We said that system (1) is a UDS
n
if
i=1 λi < 0, and at least one λi is a positive real
eigenvalue or two λi are complex eigenvalues with positive
real part Re{λi } > 0. None of them is pure imaginary
eigenvalue.
The next proposition is important to mention in order to
realize what kinds of behaviors are possible to find in the
system given by (1).
Proposition 2. Let the system (1) be a UDS with ordered
real and complex eigenvalues set Λ = {λ1 , . . . , λn } and
Re{λ1 } ≤ . . . ≤ Re{λj } < 0 < Re{λj+1 } ≤ . . . ≤
Re{λn }. Then, the system has a stable manifold E s ⊂ ℜn
and another unstable E u ⊂ ℜn with 1 ≤ j ≤ n and the
following statements are true:
(a) All initial condition χ0 ∈ ℜn /E s leads to an unstable
trajectory that goes to infinity.
(b) All initial condition χ0 ∈ E s leads to a stable trajectory that settles down at χ∗ and the system does not
generate oscillations.
(c) The basin of attraction B is E s ⊂ ℜn .
Now, we consider a switching system based on the affine
linear system (1) given by
χ̇ = Aχ + B(χ),
B1 , if χ ∈ D1 ;
(2)
..
B(χ) = ...
.
B , if χ ∈ D .
k
k
Where ℜn = ∪ki=1 Di and ∩ki=1 Di = ∅. Thus, the equilibria
of the system (2) is χ∗i = −A−1 Bi , with i = 1, . . . , k.
So the goal is to define vectors Bi which can generate a
class of dynamical systems in Rn with oscillations into an
attractor, that is, the flow Φ(χ(0)) of the system (2) is
trapped in an attractor A by defining at least two vectors
B1 and B2 . This class of systems can display various multiscroll strange attractors as a result of the combination of
several unstable “one-spiral” trajectories by means of the
commutation of B(χ), i.e., we are interested in a vector
field which can yield multi-scroll attractors constitute by
a commuted vector, Bi with i = 1, . . . , k and k ≥ 2. Each
domain, Di ⊂ ℜn , contains the equilibrium χ∗i = −A−1 Bi .
According to the above discussion we can define a multiscroll chaotic system based on UDS as follows:
Definition 3. A system given by (2) in ℜn and equilibrium
points χ∗i , with i = 1, . . . , k and k > 2. We said that
system (2) is a multi-scroll chaotic system if each χ∗i
117
117
contains oscillations around and the flow ϕ(χ0 ) generates
an attractor A ⊂ ℜn .
According to the above discussion, it is possible to define
two types of UDS in ℜ3 , and two types of corresponding
equilibria, for more details see Campos-Cantón et al.
(2010, 2012).
Definition 4. Consider the system (1) in ℜ3 with eigen∑3
values λi , i = 1, 2, 3 such that
i=1 λi < 0. Then the
system is said to be an UDS of type I (UDS-I) if one of its
eigenvalues is negative real and the other two are complex
conjugate with positive real part; and it is said to be of
type II (UDS-II) if one of its eigenvalues is positive real
and the other two are complex conjugate with negative
real part.
In order to illustrate our approach we consider the particular case of the linear ordinary differential equation(ODE)
written in the jerky form as d3 x/dt3 + α33 d2 x/dt2 +
α32 dx/dt + α31 x + β3 = 0, representing the state space
equations of (1), where the matrix A and the vector B are
described as follows:
)
( )
(
0
0
1
0
0 ,
0
0
1
;B =
(3)
A=
β3
−α31 −α32 −α33
where the coefficients α31 , α32 , α33 , β3 ∈ ℜ may be any
arbitrary scalars that satisfy the definition 4. The characteristic polynomial of matrix A given by (3) takes the
following form:
λ3 + α33 λ2 + α32 λ + α31 .
(4)
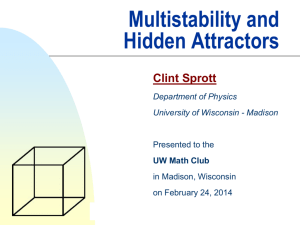
For simplicity, we vary the coefficient α31 ∈ ℜ and set the
others coefficients at α32 = 1, α33 = 1. The coefficient α31
has to assure the system will be UDS-I or UDS-II. Fig. 1
shows the location of the roots, for example the UDS’sII are given for α31 < 0, and the UDS’s-I for α31 > 1.
The system has a sink for 0 < α31 < 1. We are setting
α31 = 1.5 in order to assure a UDS-I, with these values
the eigenvalues result in λ1 = −1.20, λ2,3 = 0.10 ± 1.11i,
which satisfy Definition 4 for UDS-I. The parameter β3 is
governed by the following switching control law (SCL):
{
0.9, if x1 ≥ 0.3;
β3 =
(5)
0 otherwise.
The equilibrium points of the system (2) using the matrix
A and vector B defined in (3) and the SCL (5) are
χ∗1 = (0.6, 0, 0)T with B1 = (0, 0, 0.9)T and χ∗2 at the origin
with B2 = (0, 0, 0)T .
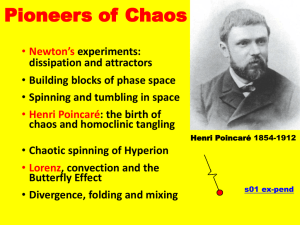
Figure 2 a) depicts the projection of the double-scroll
attractor onto the (x1 , x2 ) plane generated by the β3 SCL
(5) under equations (2)-(3).
Now, if we change the control signal given by SCL then
it is possible to generate an attractor with triple-scroll.
Therefore the β3 parameter is given as follows:
{
0.9, if 0.3 ≤ x1 ;
if −0.3 < x1 < 0.3;
(6)
β3 = 0
−0.9, if x1 ≤ −0.3.
Notice that χ∗3 = −χ∗1 . This issue is intentionally defined
to illustrate the symmetry scrolls. Figure 2 b) shows the
IFAC CHAOS 2015
118
August 26-28, 2015. Tokyo, Japan
E. Campos-Cantón et al. / IFAC-PapersOnLine 48-18 (2015) 116–121
The β3 , given by the SCL’s (7) and (8), introduces other
equilibrium points located at χ∗4 = (1.2, 0, 0)T and χ∗5 =
(−1.2, 0, 0)T , respectively. Figures 2 c) and 2 d) show
the projection of the quadruple-scroll and quintuple-scroll
attractors given by the β3 SCL (7) and (8), respectively.
Introducing more equilibrium points to the system, along
with the corresponding switching control law, one can
create any number of scrolls inside the 1D, 2D and 3Dgrid Campos-Cantón (2016). The direction of the scrolls
is not restricted to the state variable direction.
Real part of the roots
1
0.5
0
−0.5
3. MULTI-SCROLL ATTRACTORS VIA UDS IN R3
−1
−1.5
−2
−1
0
α31
1
2
Fig. 1. The location of the roots: UDS-II for α31 < 0;
UDS-I for α31 > 1.
In order to make a generalization on the UDS’s-I and
illustrate our approach, in this section we analyze some of
the systems that generate n-scrolls by different methods as
hysteresis, step function and saturation. We focus on those
that describe their experiments using the ODE written in
the jerky form (3). This type of system, was implemented
in Elwakil et al. (2000); Yalçin et al. (2002); Xie et al.
(2008); Lü et al. (2004 A); Lü et al. (2004 B); Deng
& Lü (2007), and the characteristic polynomial takes the
form (4) regardless of the method used ( hysteresisLü et al.
(2004 A), saturationLü et al. (2004 B), step functionYalçin
et al. (2002)).
Hysteresis: Lü et al. (2004 A), implemented a hysteresis
series to obtain multiscroll chaotic attractors in 1-D nscroll, 2-D n × m-grid scroll, and 3-D n × m × l-grid scroll.
The hysteresis series is given by equations (1), (2) and (3)
in Lü et al. (2004 A), as follows:
{
0, for x1 < 1,
h(x1 ) =
(9)
1, for x1 > 0,
where h(x1 ) is the hysteresis function that is used to define
the following hysteresis series,
q
p
∑
∑
h(x1 , p, q) =
h−i (x1 ) +
hi (x1 ),
(10)
i=1
Fig. 2. The projection of the attractor onto the (x1 , x2 )
plane generated by different control signal: a) (5); b)
(6); c) (7); and d) (8), with α31 = 1.5 and initial
condition (0.9, 0, 0)T .
projection of triple-scroll attractor onto the (x1 , x2 ) plane
generated by the β3 SCL (6) under equations (2)-(3).
So, quadruple and quintuple scroll attractors are yielded
by controlling the β3 parameter as follows:
1.8, if 0.9 ≤ x1 ;
0.9, if 0.3 ≤ x1 < 0.9;
β3 =
(7)
if −0.3 < x1 < 0.3;
0,
−0.9, if x1 ≤ −0.3.
1.8, if 0.9 ≤ x1 ;
0.9, if 0.3 ≤ x1 < 0.9;
if −0.3 < x1 < 0.3;
(8)
β3 = 0,
−0.9, if −0.9 < x1 ≤ −0.3;
−1.8, if x1 ≤ −0.9.
118
i=1
where p and q are positive integers, and hi (x1 ) = h(x1 −
i + 1) and h−i (x1 ) = −hi (x1 ). Equation (10) can be recast
as follows:
−p, for x
{1 < −p + 1,
i − 1 < x1 < i + 1,
h(x1 , p, q) = i, for
(11)
i = −p + 1, . . . , q − 1,
q, for x1 > q − 1.
Using the equation (2) but redefine the vector B as
follows B = −AΘ(χ), where Θ(χ) = (h(x1 , p, q))T , it
is possible to generate multiscroll attractors based on
hysteresis series. This approach may be explained with the
UDS definition. Considering the parameters described by
the authors, matrix A in (3) takes the following values:
α31 = 0.8, α32 = 0.72, α33 = 0.6. Therefore the
eigenvalues result in λ1 = −0.85, λ2,3 = 0.12 ± 0.95i,
where Definition 4 is satisfied for UDS-I. The equilibrium
points for the 1-D n-scroll are located along the x-axis.
The corresponding switching control law is governed by
parameter β3 which takes the form described next:
{
1
β3+ , if dx
dt > 0,
β3 =
(12)
dx1
β3− , if dt < 0,
IFAC CHAOS 2015
August 26-28, 2015. Tokyo, Japan
E. Campos-Cantón et al. / IFAC-PapersOnLine 48-18 (2015) 116–121
119
15
10
x
2
5
0
−5
−10
−15
Fig. 3. The projection of the attractor onto the (x1 , x2 )
plane generated by a hysteresis serie. The equilibrium
points are marked with asterisk, and the switching
surface with a dotted line.
where
−4, if x1 < −3;
−3, if −3 < x1 < −2,
−2, if −2 < x1 < −1,
−1, if −1 < x1 < 0,
β3+ =
(13)
0, if 0 < x1 < 1,
1, if 1 < x < 2,
1
2, if 2 < x1 < 3,
3, if x1 > 3,
and
β3−
−3,
−2,
−1,
0,
=
1,
2,
3,
4,
if
if
if
if
if
if
if
if
x1 < −3;
−3 < x1 < −2,
−2 < x1 < −1,
−1 < x1 < 0,
0 < x1 < 1,
1 < x1 < 2,
2 < x1 < 3,
x1 > 3.
(14)
From this it may be concluded that the hysteresis series
acts similarly to the switching control law described previously in (2). Equilibrium points are being introduced
and the system is forced to oscillate around them. Since
both systems are UDS-I, the orbit escapes by means of
the unstable manifold E u until it reaches the commutation
surface and generates a change to other equilibrium point.
This may be seen in Figure 3.
Saturation: A saturation function was implemented in
Lü et al. (2004 B), this approach may generate 1-D nscroll, 2-D n × m-grid scroll, and 3-D n × m × l-grid scroll
chaotic attractors. The saturation function implemented
in Lü et al. (2004 B) can be described with UDS-I and
-II by means of equation (3) and a switching control law
taking the following form:
{
7, if x1 > 1,
β3 = 0, if |x1 | ≤ 1,
(15)
−7, if x1 < −1.
According to the specific values described in Lü et al.
(2004 B), the matrix A in (3) takes the following values
α31 = α32 = α33 = 0.7, for |x1 | > 1. The system presents
a double scroll chaotic attractor with eigenvalues λ1 =
−0.848, λ2,3 = 0.074 ± 0.905i, satisfying Definition 4 for
UDS-I. The equilibrium points are located at (±10, 0, 0)T ,
119
−20
−10
0
x1
10
20
Fig. 4. The projection onto the plane (x1 , x2 ) of the attractors generated by a saturation serie. The equilibrium
points are marked with red dots, and the switching
surface with black lines at x1 = ±1.
this may be appreciated in Figure 4. For |x1 | ≤ 1, the
matrix A in (3) takes the following values α31 = 6.3,
α32 = α33 = 0.7. Thus, A has the following eigenvalues
λ1 = 1.530, λ2,3 = −1.115 ± 1.694i, satisfying Definition 4
for UDS-II. The equilibrium point is located at the origin
(0, 0, 0)T . Here there are three equilibrium points and the
flow of the system crosses from one to another because the
system contains UDS-I and -II. In this way it is possible
to describe all systems presented in Lü et al. (2004 B).
The mechanism of generation of the attractor presented in
Fig. 4 in terms of UDS is given as follows:
{
type I, if x1 > 1,
U DS = type II, if |x1 | ≤ 1,
(16)
type I, if x1 < −1.
Notice that the Chua’s system can be described in a
similar way that saturated functions for generation of
multiscroll attractors. Here there are some open questions,
for example about the length of the middle region that
contains the UDS-II in order to maintain the attractor,
another question is about the minimum proximity of the
equilibrium point to the commutation surface in order to
generate a scroll around it.
Step function: Yalçin et al. (2002) made an implementation of a step function from which they can generate 1D,
2D, 3D-grid scroll attractors. The step function depicted
in equations (3) and (4) in Yalçin et al. (2002), may be
interpreted with UDS-I as follows:
0, if x1 < 0.5
1, if 0.5 ≥ x1 > 1.5
β3 =
(17)
2,
if 1.5 ≥ x1 > 2.5
3, if x1 ≥ 3.5.
Using the parameters described by the authors (α31 = 0.8,
α32 = α33 = 1) according to the five 1D-grid scroll
as shown in Figure 5. The eigenvalues result in λ1 =
−0.89, λ1,2 = 0.04 ± 0.94i. Here the equilibrium points
are (i, 0, 0)T with i = 0, 1, 2, 3, 4. The switching control
law is taking the same form as the system described in
Section 2. So Definition 4 is also satisfied for UDS-I.
IFAC CHAOS 2015
120
August 26-28, 2015. Tokyo, Japan
E. Campos-Cantón et al. / IFAC-PapersOnLine 48-18 (2015) 116–121
methods to yield multiscroll attractors: hysteresis, step
function and saturation, and can be extended to Brownian
motion generation. Controlling the vector B with the
switching control law it is possible to generate any number
of scrolls in whatever direction. Also, the UDS approach
has been extended to generate hyperchaotic multiscroll
attractors. The future work is about the generation of 2D
and 3D grids of families of multi-scroll attractor given by
UDS-I and II, in the same spirit that Aguirre-Hernádez et.
al. (2015) gave a family based on UDS-I.
REFERENCES
Fig. 5. The projection onto the plane (x1 , x2 ) of the attractors generated by a step function. The equilibrium
points are marked with asterisk, and the switching
surface with a dotted line.
4. BROWNIAN MOTION
The mechanism described by Huerta-Cuellar et. al. (2014)
for Brownian motion generation can be described in terms
of UDS-I. The Langevin model for Brownian motion
generation is given as follows:
ẋ = y,
(18)
ẏ = −γy + Af (t).
The evolution of the flow Eq. (18) with the stochastic
term Af exhibits the characteristic properties of Brownian
motion, such as a linear growth of the mean square displacement and an approximately -2 power law frequency
spectrum. In order to generate deterministic Brownian motion Huerta-Cuellar et. al. (2014) added an additional degree of freedom to the phenomenological system Eq. (18),
where the fluctuating acceleration Af (t) is now replaced
by variable z defined by a third differential equation. The
proposed variable z, which acts as fluctuating acceleration,
produces a deterministic dynamical motion with a chaotic
behavior. When a particle is moving in a fluid, friction and
collisions with other particles existing in the environment
necessarily produces changes in the motion velocity and
acceleration; all these changes are considered in the jerky
equation. In this work, a UDS-I was defined as follows:
ẋ = y,
ẏ = −γy + z,
(19)
ż = −α1 x − α2 y − α3 z + α4 ,
where γ, αi , i = 1, . . . , 4, are parameters. The first two
equations are derived from the Langevin Eq. (18) with
a little change: the stochastic term is replaced by the
deterministic term which is technically known as jerk. A
trajectory of deterministic Brownian motion was presented
by switching one hundred UDS-I. The parameters values
were γ = 7 × 10− 5α1 = 1.5, α2 = 1.2, α3 = 0.1. The
eigenvalues result in λ1 = −0.8303, λ1,2 = 0.3652±1.2935i
that correspond to a UDS-I. Details can be seen in HuertaCuellar et. al. (2014).
5. CONCLUSION
By means of the UDS-I and II definitions, one can assure
the generation of multiscroll chaotic attractors regardless
of the method used. So the UDS approach unified three
120
Ahmad W. M. (2006). A simple multi-scroll hyperchaotic
system, Chaos Solitons and Fractals, 27 1213–1219.
Aleksandronov A. Y., Chen Y., Platonov A. V. & Zhang
L. (2011). Stability analysis for a class of switched
nonlinear systems, Automatica, 47, 2286–2291.
Aguirre-Hernández, B., Campos-Cantón, E., LópezRenterı́a, J.A. & Dı́az González E.C. (2015) A polynomial approach for generating a monoparametric family
of chaotic attractors via switched linear systems, Chaos,
Solitons & Fractals 71
Baier G. & Klein M. (1990). Maximum hyperchaos in
generalized Hénon map, Phys. Lett. A, 151, 281–284.
Campos-Cantón E., Campos-Cantón I., González-Salas J.
S. & Cruz-Ordaz F. (2008). A parameterized family of
single-double-triple-scroll chaotic oscillations, Rev. Mex.
de Fı́s., 54, 411–415.
Campos-Cantón E., Barajas-Ramı́rez J.G., Solı́s-Perales
G. & Femat R. (2010). Multiscroll attractors by switching systems, CHAOS 20, 013116.
Campos-Cantón, E., Femat, R. & Chen, G. (2012)Attractors generated from switching unstable dissipative
systems, CHAOS, 22 : 033121.
Campos-Cantón E. (2016) Chaotic attractors based on
unstable dissipative systems via third-order differential equation, Int. J. of Mod. Phys. C, 27,1, 1650008.
DOI:10.1142/S012918311650008X
Chiou J. S., Wang C. J., Cheng C. M. & Wang C. C.
(2010). Analysis and synthesis of switched nonlinear systems using the T-S fuzzy model, Applied Mathematical
Modelling, 34, 1467–1481.
Chua L. O. , Komuro M. & Matsumoto T. (1986). The
double scroll family. IEEE Transactions on Circuits and
Systems, 33(11),1072–1118.
Deng W. & Lü J. (2007). Generating multi-directional
multi-scroll chaotic attractors via a fractional differential hysteresis system, Phys. Lett. A 369 438 - 443.
Elwakil A. S., Salama K. N. & Kennedy M. P. (2000). A
system for chaos generation and its implementation in
monolithic form,” Proc. IEEE Int. Symp. Circuits and
Systems (ISCAS 2000)(V), pp. 217-220.
Hirsch M.W. & Smale S. (1974). Differential Equations,
Dynamical Systems and Linear Algebra, Academic, New
York.
Huerta-Cuellar, G., Jiménez López, E., Campos Cantón,
E. & Pisarchik, A. N. (2014) An approach to generate deterministic Brownian motion, Communications in
Nonlinear Science and Numerical Simulation, 19, 27402746.
Lü J., Yu X. & Chen G. (2003). Generating chaotic
attractors with multiple merged basins of attraction:
IFAC CHAOS 2015
August 26-28, 2015. Tokyo, Japan
E. Campos-Cantón et al. / IFAC-PapersOnLine 48-18 (2015) 116–121
A switching piecewise-linear control approach, IEEE
Transactions on Circuits and Systems I 50(2).
Lü J., Han F., Yu X. & Chen G. (2004 A). Generating
3-D multi-scroll chaotic attractors: A hysteresis series
switching method, Automatica 40, 1677-1687.
Lü J., Chen G. & Yu X. (2004 B). Design and analysis
of multiscroll chaotic attractors from saturated function
series, IEEE Transactions on Circuits and Systems, Part
I, 51(12).
Lü J., Murali K., Sinha S., Leung H. & Aziz-Alaoiu M.
A. (2008). Generating multi-scroll chaotic attractors by
thresholding, Phys. Lett. A 372 3234–3239.
Ma R. & Zhao J. (2010). Backstepping desing for global
stabilization of switched nonlinear systems in lower
triangular form under arbitrary switchings, Automatica,
46, 1819–1823.
Madan R. N. (1993). Chua’s Circuit: A Paradigm for
Chaos. World Scientific: Singapore.
Matsumoto T., Chua L. O. & Kobayashi K. (1986). Hyperchaos: laboratory experiment and numerical confirmation, IEEE Transactions on Circuits and Systems,
CAS-33 (11), 1143-1147.
Qiang W. F. & Xin L. C. (2006). A new multi-scroll chaotic
system, Chinese Physics 15(12).
Rössler O. E. (1979). An equation for hyperchaos, Phys.
Lett. A, 71, 155-157.
Sánchez-López C., Trejo-Guerra R., Muñoz-Pacheco J. M.
& Tlelo-Cuautle E. (2010). N-scroll chaotic attractors
from saturated function series employing CCII+s, Nonlinear Dynamics, Volume 61, Numbers 1-2, pp. 331-341.
Si-Min Y., Zai-Guang M., Shui-Sheng Q., Shi-Guo P. &
Qing-Hua L. (2004). Generation and synchronization of
N-scroll chaotic and hyperchaotic attractors in fourthorder systems, Chinese Physics Vol 13(3).
Suykens J. A. K. & Vandewalle J. (1993). Generation of
n-double scrolls (n=1;2;3;4;. . .). IEEE Transactions on
Circuits and Systems, Part I, 40(11),861–867.
Suykens J. A. K., Huang A. & Chua L. O. (1997). A family
of n-scroll attractors from a generalized Chua’s circuit.
International Journal of Electronics and Communications, 51(3),131–138.
Tang K. S., Zhong G. Q., Chen G. R. & Man K. F. (2001).
Generation of n-scroll attractors via sine function, IEEE
Transactions on Circuits and Systems, Part I, vol. 48,
pp. 11, pp.1369- 1372.
Wolf A., Swift J.B., Swinney H.L. & Vastano J. (1985).
Determining Lyapunov exponents from a time series,
Elsevier Science Publishers Physica 16 D, 285–317.
Xie G., Chen P. & Liu M.(2008). Generation of multidirectional multiscroll attractors under the third-order Jerk
system, ISISE 08, pp 145 - 149.
Yalçin M. E., Suykens J. A. K., Vandewalle J. & Ozoguz S.
(2002). Families of Scroll Grid Attractors, Int. J. Bifur.
Chaos 12(1)23.
Yalçin M.E., Suykens J.A.K. & Vandewalle J. (2000).
Experimental confirmation of 3- and 5-scroll attractors
from a generalized Chua’s circuit, IEEE Transactions on
Circuits and Systems, 47(3), 425-429.
Yu S., Lü J., Leung H. & Chen G. (2005). Design and
implementation of n-scroll chaotic attractors from a
general jerk circuit, IEEE Transactions on Circuits and
Systems I 52(7).
View publication stats
121
121
Yu S., Lu J. & Chen G. (2007). A family of n-scroll hyperchaotic attractors and their realization, Phys. Lett.
A 364, 244-251.
Ontanon-Garcia, L.J., Jimenez-Lopez, E., CamposCanton, E. & Basin, M. (2014). A family of hyperchaotic
multi-scroll attractors in Rn , Applied Mathematics and
Computation 233, 522-533.