Lab:06 Transient analysis of first order
systems
Objective:
The following lab would help the students to get familiar with first order systems and also with
specifications of the first order systems.
Software: Matlab First
Order System:
The transfer function of the first order system is given below. The input to first order system is unit step
defined by R(s). Response od first order system depends on single parameter “a”, which defines the speed
of output response.
a
1
G(s) =
,
R(s) =
s+a
s
Figure 1 First Order System
The output of system will be product of input of the system and transfer function of the system.
Output will be having two poles one at origin and other at s = -a.
𝑎
𝐶(𝑠) =
(1)
𝑠(𝑠+𝑎)
In time domain output of first order system will be
𝐶(𝑡) = 1 − 𝑒−𝑎𝑡
1
(2)
Figure 2 Output Response of First Order System
Time constant of first order system is given by
1
τ=
(3)
a
Rise Time: Time required for system output to reach from 10% of final value (C(t) = 0.1
× Cf(t)) to 90% of final value (C(t) = 0.9 × Cf(t)).
2.2
Tr =
a
(4)
Settling Time: It is defined as the time for the response to reach and stay within 2 % of its final
value. (0.98 × Cf(t)~1.02 × Cf(t))
4
Ts = a (If 2% of final value criterion is used)
(5)
3
Ts = a (If 5% of final value criterion is used)
(6)
Task 1: Find the pole location, rise time and settling time of the following system.
a) G(s) = 1 s+1
b) G(s) = 5 s+2
Write your observations of Task 1:
S. No
Pole
Rise Time
Location Calculated
Rise Time
Observed
Settling Time
Calculated
Settling Time
Observed
a)
-1
2.2
2.1970
4
3.9121
b)
-2
1.1
1.0985
2
1.9560
Table 6.1 System observed response
2
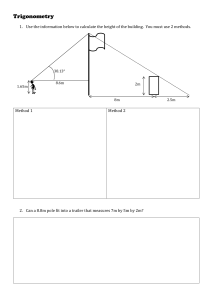
Task 2:For the RC circuit given below, find equation for output voltage, pole location, rise time
and settling time when the applied voltage is 𝑉𝑖(𝑡) = step voltage, For the circuit R = 50Ω and C
= 5mF.
G1=1/(s*R*C+1)
(7)
3
Figure 5: RC Circuit
Output Voltage Equation: 𝒅
𝒅𝒙
Pole Location:
Rise Time (Calculated):
Rise Time (Observed):
Settling Time (Observed):
Settling Time (Calculated):
𝒗𝒄 = 𝑽𝒊𝒏 + 𝑰𝑹
𝑪
𝑪
-1
0.5
0.5493
0.9780
1
Table 6.2 System observed response
Code:
s = tf('s');
G1 = 1/(0.025*s + 1);
p = pole(G1)
step(G1)
stepinfo(G1)
Output:
Figure 6: Output of RC circuit
4
DC Motor
A motor is an electromechanical component that yields an angular displacement output, θm, for an input
voltage,ea, that is, a mechanical output generated by an electrical input. The motor’s schematic is shown in
Figure 6.4(a) and its transfer function for motor speed response is shown in Figure 6.4(b). The DC motor
speed transfer function is
ωm(s) =
Ea(s)
Kt/(RaJm)
(7)
s+ 1 (D +KtKb)
Jm
m
Ra
Or for simplicity we can use K
ω m (𝑠 )
E a (s )
= (s +α )
(8)
Figure 7 DC Motor (a) Schematic, (b) Block Diagram
Task 4:In this task students will study changes occur in angular velocity when location of pole is varied,
where location of pole is dependent on different parameters of the system. Take K=1 and vary α from 1 to
5 and study the variation in response then take K=5, vary α from 1 to 5 and study the effect. Use step input
and write your observations.
Code:
k1=1;
a1=1;
s=tf('s');
G1=k1/(s+a1);
p=pole(G1)
grid on;
stepinfo(G1)
k1=1;
a1=2;
s=tf('s');
G2=k1/(s+a1);
p=pole(G2)
stepinfo(G2)
k1=1;
a1=3;
5
s=tf('s');
G3=k1/(s+a1);
p=pole(G3)
stepinfo(G3)
k1=1;
a1=4;
s=tf('s');
G4=k1/(s+a1);
p=pole(G4)
stepinfo(G4)
k1=1;
a1=5;
s=tf('s');
G5=k1/(s+a1);
p=pole(G5)
step(G1,G2,G3,G4,G5)
stepinfo(G5)
legend('G1','G2','G3','G4','G5')
Outputs:
Figure 8: For k=1
Conclusion:
In this task we show the outputs of the system by changing the value of Alpha while k=1 is
constant. We also use matlab to find the Tr, Ts of the system. We observe the RC circuit and its
settling time and rise time while comparing the results of calculated and observed.
6