Math Review for Economics: Sets, Functions, Calculus, Optimization
advertisement

Math Review for MECON6021
Hongsong Zhang
School of Economics and Finance
University of Hong Kong
September 10, 2016
Abstract
This note quickly reviews the basic mathematics which will be used many times in MECON6021,
as well as in some other economic courses in the department. Our purpose is not to give you
a mathematics course to cover all math concepts in these fields. Instead, we want to review
only the terms frequently used in the course. We also only focus on the idea of these concepts and do not concentrate on rigorous detail and proofs of the theorem. Hopefully this note
is especially useful for you if: 1) you never took any math courses covering these fields before,
or 2) you took these courses long time ago and probably are professionals working in the industry.
Keywords: Set, Function, Calculus, Optimization
1
Outline of the Math Review
1. Set
(a) Set Operations
(b) Sequence and Limit
(c) Close/Open Sets
(d) Bounded Sets
(e) Compact Sets
(f) Convex Sets
2. Function
(a) Definition of a function
(b) Shift of a function and movement along the function
(c) Monotone Function
(d) Continuous Function
(e) Concave/Convex Function
3. Calculus
(a) Calculus (single and multivariate)
i. Derivative (Single Variable Function)
ii. Higher-Order Derivative
iii. Composite Function and Chain Rule
iv. Partial Derivative (Multi-Variable Function)
v. Total Differentiation
vi. Implicit Function Theorem
(b) Define Concave/Convex Function Using Calculus
i. Function of One Variable
2
ii. Function of Two Variables
4. Optimization
(a) Unconstrained Optimization
i. Notation
ii. Different Concepts of Maximum
iii. FOC and SOC
iv. Envelope Theorem
(b) Equality Constrained Optimization
i. Notation
ii. Lagrange Condition
iii. Envelope Theorem
1
Set
This section reviews some basic concepts about set and set operation. We will use it to define the
consumption set and production set. We will also use them in the optimizing decisions of firms and
consumers.
1.1
Set Operations
Definition 1 (Set) Set A is a collection of distinct objects. (could be empty)
A element in A: x ∈ A.
Elements in a set are not ordered. so the following two sets are the same: {1,2}={2,1}.
Operations of sets: [show numerical example and figure]
1. Subset: set A is contained in B.
• A ⊂ B: set A is contained in B, and A 6= B.
• A ⊆ B: set A is contained in B, and A and B may be equal.
3
2. Union: A ∪ B. All points in either A or B.
3. Intersection: A ∩ B. All points in both A and B.
4. Complement: Ā. All points not in A.
5. A \ B: all points that are in A, but not in B.
De Morgan’s Law:
1. (A ∪ B) = A ∩ B.
The complement of the union of two sets equals the interception of their complement.
2. (A ∩ B) = A ∪ B.
The complement of the interception of two sets equals the interception of their union.
1.2
Limit of a sequence
• A sequence: x1 , x2 , x3 , ..., xn , ...
Elements in a sequence is ordered. sequence 1,2,3,4 6= sequence 4,3,2,1.
— finite sequence: x1 , x2 , x3 , ..., xn .
— infinite sequence: x1 , x2 , x3 , ..., xn , ...
• Limit: if a function f (n) approaches x0 arbitrarily when n approaches n0 , we call “f(n) has
limit x0 when n approaches n0 ”. Notation: limn→n0 |f (n) − x0 | = 0.
“f (n) approaches x0 arbitrarily” means that the difference between f (n) and x0 is infinitely
small.
In math language: “f(n) has limit x0 when n approaches n0 ” if for any > 0, we can always
find a d > 0, such that for any points satisfying |n − n0 | < d, we always have |f (n) − x0 | < .
• Convergence sequence
convergent sequence: we call a sequence convergent sequence if xn approaches a point x0
as n goes to infinite. Notation: limn→inf |xn − x0 | = 0.
limit of a sequence: the above x0 is called the limit of the sequence. Denoted: limn→inf xn =
4
x0 .
inf
Example: sequence { n1 }inf
n=1 is convergent with limit 0. sequence {n}n=1 is not convergent.
1.3
Properties of Sets
Next, we study some basic properties of a set.
¨How to represent an open ball in mathematics? Br (x0 ) = {x ∈ X : |x − x0 | < r}.
• Open Set: A set X is called an open set if: for every point x in X, there is a open ball Br (x)
such that Br (x) is contained in X.
Note: A open set does not contain its own “bound”.
• Closed set: A set is a closed set if its complement is open.
Note: A closed set contains its own “bound”.
• Bounded Set: If a set X can be contained in a “finite size open ball”, then we call X a
“bounded set”.
• Compact Set: If a set is both bounded and closed, we call it a compact set.
• Convex Sets: A set X is convex if for arbitrary x, y ∈ X, tx + (1 − t)y ∈ X for any t ∈ [0, 1].
¨ Exercise: prove that the budget constraint B = {x ∈ X : px ≤ m} is convex.
Proof. for any two points x1 , x2 ∈ B, we have px1 ≤ m and px2 ≤ m. Then for any t ∈ [0, 1],
we must have tx1 + (1 − t)x2 ≤ m. This is equivalent to say that tx1 + (1 − t)x2 ∈ B. So the
budget constraint B is convex.
2
Function
A function F maps a set X to another set Y. Denote as F : X → Y . Usually in economics we
choose Y to be the space of real number, R.
Three elements of a function: a domain (X), a range (Y), and a mapping (F).
Example: y = 2x2 (mapping F ), x ∈ X = R(domain), y ∈ Y = R+ (range).
Key requirement: unique value. For any x ∈ X, there is only one y ∈ Y , such that y = F (x).
5
2.1
Monotone Function
Increasing functions and decreasing functions are both called monotone functions.
Increasing function: when x1 < x2 , then F (x1 ) ≤ F (x2 ).
Decreasing function: when x1 < x2 , then F (x1 ) ≥ F (x2 ).
Strictly monotone function: when the above inequality is strict.
Examples:
1. y = 2x is monotone on R. (figure)
2. y = x2 is NOT monotone on R. But it is monotone on R+ . (figure)
2.2
Continuous Function
Function F (x) is continuous at a point x0 : if you can always reach F (x0 ) when you approaches x0
from both left and right.
Notation: limx→x0 + F (x) = limx→x0 − F (x) = F (x0 ).
The function F (x) : X → Y is called a continuous function when it is continuous at all points in
X.
2.3
Concave/Convex Function
Concave function: a function (of one variable) is concave if F [tx + (1 − t)y] ≥ tF (x) + (1 − t)F (y),
for all x,y and t ∈ [0, 1].
Convex function: a function (of one variable) is convex if F [tx + (1 − t)y] ≤ tF (x) + (1 − t)F (y),
for all x,y and t ∈ [0, 1].
Strictly concave (convex) when the inequality is strict when x 6= y and t ∈ (0, 1).
Note that if F(x) is convex, then -F(x) must be concave. Vice versa.
Concave functions and convex functions are important to determine whether there is an interior
maximum/minimum.
6
3
Calculus
In this course, we are going to use calculus a lot. Economic analysis in some sense is based on
“marginal effect analysis”, which is usually captured by derivative of a particular function (e.g.
marginal utility, marginal cost, marginal revenue, etc.). You may find this short note about basics
in calculus useful throughout the course.
3.1
Definition
We start with the simple case, a single variable function y = F (x), where both x, y ∈ R.
Definition 2 (Function F(x) is differentiable at point x0 ) A function y = F (x) is differen(x0 )
tiable at point x0 if and only if limx→x0 F (x)−F
converges. We call F 0 (x0 ) the derivative of F(x)
x−x0
at point x0 :
dy
F (x) − F (x0 )
= F 0 (x0 ) = limx→x0
.
dx
x − x0
(1)
Example 1 Suppose F (x) = x2 . Calculate its derivative at point x0 = 2.
Use the definition of derivative in equation 1, we have
F (x) − F (2)
x−2
x2 − 22
= limx→2
x−2
(x + 2)(x − 2)
= limx→2
x−2
F 0 (x0 = 2) = limx→2
= limx→2 (x + 2)
= 4
Remarks:
1. If a function F (x) is differentiable at all points in its domain, we call F (x) a differentiable
function.
2. A function is differentiable intuitively means that it is “smooth” in some sense.
3. Not all functions are differentiable, however. Examples.
7
4. A function may be differentiable at some points, but not others. Examples.
3.2
Derivatives: Some Useful Formula
While it is useful to use the definition of derivative to verify the differentiability of a function at
a point, it is time-consuming to compute derivatives using the definition. For particular forms of
functions, it is easier to remember the formula to compute derivatives. In this subsection, I list
formula to compute the derivative for those functions widely used in this course. The following
table summarizes the formula to compute the derivatives for popular functions.
Function
Derivative
F(x)=c
F’(x)=0
F(x)=cx
F’(x)=c
F(x)=cx2
F’(x)=2cx
F(x)=cxn
F’(x)=ncxn−1
F(x)=exp(cx)
F 0 (x) = c exp(cx)
F(x)=ln(x)
F’(x)= x1
Example 2 For the example discussed above F (x) = x2 . Compute its derivative at point x0 = 2.
Use the derivative formula for polynomial functions in the above table, we have
F 0 (x0 = 2) = 2x|x=2
= 4
3.3
Chain Rule
Chain rule is used to compute derivatives of composite functions.
Consider the composite function: y = F (z), where z = G(x). Then the derivative:
dy dz
dy
=
= F 0 (z)G0 (x)
dx
dz dx
Exercise: y = 3z 2 , z = exp(2x). Compute the derivative
8
dy
dx .
3.4
Higher-Order Derivative
Definition 3 (Second Order Derivative) A function y = F (x) is twice differentiable at point
x0 . Denote F 00 (x) or
d2 y
dx2
as the second-order derivative of F(x) at x0 . Then,
F 00 (x) =
dy
d( dx
)
d2 y
=
.
2
dx
dx
(2)
Using the above definition, you can easily prove the following way to compute second-order derivatives.
Proposition 1 (Second Order Derivative) A function y = F (x) is twice differentiable at point
x0 , and F 0 (x) is the first-order derivative of F(x) at point x. Then the second-order derivative of
F(x) at x0 is
F 00 (x0 ) = limx→x0
F 0 (x) − F 0 (x0 )
.
x − x0
(3)
Remark 1 (Intuitive meaning of first-order and second-order derivatives) The first order derivative defines whether a function is increasing or decreasing. The second-order derivative
determines whether a function is concave or convex. We will discuss the latter in more detail.
3.5
Partial Derivative
A multivariate function: y = F (x, z). Both x and z are variables that affect y.
We ask the question: given z, how does the change of x affect y?
This question is characterized by the so-called partial derivative.
Definition 4 (Partial Derivative) A function y = F (x, z). The partial derivative of y w.r.t x
at x0 , denoted as
∂y
∂x ,
is defined as
∂F (x, z)
F (x, z) − F (x0 , z)
∂y
=
= limx→x0
∂x
∂x
x − x0
Remark 2 The definition of partial derivative looks complicated, right? Do not be scared by it.
In practice when computing the partial derivative, you just need to treat all other variables (z in
9
the above case) as ”constant”. Then you can use exactly the same rule of ordinary derivative to
compute partial derivative.
3.6
Total Differentiation
The economic question we ask here is: what are the factors causes the observed change of result?
This question can be answered by total differentiation.
Consider the function y = F (x, z). We observed that y changed by an amount
a
y. How does this
change links to the change of x and z?
Definition 5 (Total differentiation) For a multivariate function y = F (x, z), the total differentiation, dy, is defined as
dy =
3.7
∂F (x, z)
∂F (x, z)
dx +
dz
∂x
∂z
(4)
Derivative of Implicit Functions
Suppose we know a implicit function F(x,y)=0. Given that the equation F(x,y)=0 is always satisfied, how does a change of x affect y?
We can apply the concept of total differentiation to derive it.
Proposition 2 (Derivative of Implicit Functions) Given an implicit function F(x,y)=0, then
∂F (x,y)
dy
= − ∂F∂x
.
(x,y)
dx
(5)
∂y
Proof. For the implicit function 0=F(x,y), apply the total differentiation, we have
d0 =
∂F (x, y)
∂F (x, y)
dx +
dy
∂x
∂y
As d0=0, we can easily derive equation 5.
Exercise: F (x, y) = x3 y 2 + exp(xy 2 ) = 0. Compute the derivative
10
dy
dx
at point (x,y)=(1,2).
3.8
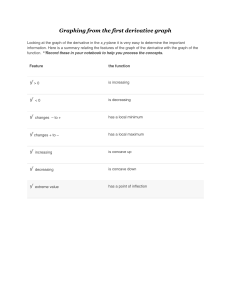
Increasing and Decreasing Functions
Proposition 3 If function F(x) is differentiable at point x, then
(1) F(x) is increasing at point x, iff F 0 (x) ≥ 0;
(2)F(x) is decreasing at point x, iff F 0 (x) ≤ 0.
In application, we use this condition more than the definition to check the monotonicity of a
function.
3.9
Concave and Convex Functions and Second order derivative
Proposition 4 If function F(x) is differentiable up to second order at point x, then
(1) F(x) is concave at point x, iff F 00 (x) ≤ 0;
(2)F(x) is convex at point x, iff F 00 (x) ≥ 0.
(3) F(x) is globally concave if F 00 (x) ≤ 0 for all x; F(x) is globally convex if F 00 (x) ≥ 0 for all x.
4
Optimization
Armed with the concepts of sets, functions, and calculus, we can now talk about optimization –
maximizing/minimizing a objective function. We will start with the simpler case without constraint
and continued with the more popular case with constraint (e.g. budget constraint in consumers’
optimization problem).
4.1
Unconstrained Optimization
Suppose we have a (single-variable) function F(x). For example, you can think about F(x) as profit
of a firm, utility of a consumer, or your own satisfaction about your life. You want to maximize
this objective function. Does it have a maximum (minimum)? How can we find it?
4.1.1
The Problem
The problem is written as
maxx∈X F (x)
11
(6)
There are three elements in this so-called maximization problem: an objective function (F(x)), a
area (X) on which you do the maximization, and the choice variable (x). Changing any of them
may change your maximization problem. We call the maximized value of the objective function
”maximum” or ”value function”, V.
V = maxx∈X F (x)
4.1.2
(7)
Different Concepts of Maximum
There are different concepts of maximum: local maximum, global maximum; unique maximum,
multiple maximum. I illustrate the idea in the following figure 1.
Figure 1: Different types of maximum
• Interior solution VS corner solution
4.1.3
FOC and SOC
The maximum/minimum point is highly related to the first-order and second-order derivatives of
the objective function. The conditions based on first- and second- order derivatives determines
whether there is a maximum or minimum. We formally call these conditions first-order conditions
(FOC) and second-order conditions (FOC). In particular, FOC usually determines whether it is a
(interior) optimal point (could be maximum, minimum, or neither). SOC determines whether the
optimal point is a maximum, minimum or sometimes neither.
12
First Order Condition
The first order condition for the above maximization problem as defined in equation 7 is
F 0 (x) = 0
(8)
The idea for FOC is that when you move around the point at which F’(x)=0, the change of the
objective function F(x) is zero.
By solving this equation F’(x)=0, we may get no solution, 1 solution, or many solutions. This
depends on the shape of the function F(x).
In the ideal case, suppose we get only one solution, denoted as x∗ . Then, as discussed above, x∗
may be a minimum, maximum, or neither.
Exercise: Consider the maximization problem maxx∈R F (x) = x2 − 4x + 4. Write out the first
order condition and find the optimal solution x∗ .
Second Order Condition
The second order condition provides a justification about whether x∗ is a minimum, maximum, or
neither. A sufficient condition to ensure that x∗ is a maximum point is that
F 00 (x∗ ) < 0
or
F 00 (x∗ ) = 0, F 0 (x∗ −) > 0, andF 0 (x∗ +) < 0
(9)
This is called the second order condition (FOC) for maximization.
Exercise:
1. In the exercise above, write out the second order condition and check whether the x∗ you get is
a maximum.
2. Consider the maximization problem: maxx∈R F (x) = x3 + 4x2 + 4x + 1. (1) Write out the first
order condition, solve for all x∗ . (2) Write out the second order condition, and check whether the
13
solution(s) you got in the first step is a maximum. Find the maximum point, if any.
4.1.4
Envelope Theorem
The maximization problem tries to choose a x (called choice variable) to maximize the objective
function F(x). Usually the objective function is also a function of other exogenous variables, e.g.
F(x,a). The variable a is given when you are choosing x to maximize the objective function. In
this case, the value function, V, is a function of the exogenous variable a.
V (a) = maxx∈X F (x, a)
We want to ask the question: how does a change of the exogenous variable a affect the value
function V(a)? Envelope theorem gives you the answer.
Proposition 5 (Envelope theorem) Suppose V (a) = maxx∈X F (x, a) and x∗ (a) is the maximizer, then
V 0 (a) =
∂F (x, a)
|x=x∗ (a)
∂a
(10)
Exercise (revised): Suppose a firm’s cost function, C(p, a) = ap2 − 4a2 p + 8a2 , depends on
its wage rate p and material price 1 > a > 0. The firm can choose p, but the material price
is exogenously given. (1) Write out the first order condition and solve out the solution to FOC,
denoted as p∗ . (2) Write out SOC, and check whether p∗ maximizes or minimizes the cost function.
(3) Denote V(a) as the maximized profit (if any), use the envelope them to find out the marginal
effect of material price on profit. (4) Find V(a) explicitly, compute
dV (a)
dA .
Is the result the same as
what you get in (3)?
4.2
4.2.1
Equality Constrained Optimization
The Problem
In many cases, the optimization/maximization problem is subject to some constraint. For example,
when you decide how much to purchase to maximize your “satisfaction”, you are constrained by
14
your budget constraint. That is, your maximization problem is in the following form:
maxx U (x)
s.t.px ≤ m
To simplify the analysis, we assume that you “always use up your money” to maximize your
satisfaction. So we have equality constraint. The equality-constrained maximization problem is
written as
V (p, m) = maxx U (x)
s.t.
px = m
This subsection reviews how to find the maximizer of this problem.
4.2.2
Lagrangian Function
We can utilize the Lagrangian condition to solve the above problem in 11.
First define the Lagrangian function as
L = U (x1 , x2 ) + λ(m − p1 x1 − p2 x2 )
Then the associated FOC becomes
∂L
=0
∂x1
∂L
=0
∂x2
∂L
=0
∂λ
15
(11)
Or equivalently (please verify this),
∂U
∂x1
∂U
∂x2
= λp1
(12)
= λp2
(13)
px = m
(14)
There are three equations and three unknowns, x1 , x2 , and λ, in this equation system. In principle
we can solve out the solution: x∗1 (p, m), x∗2 (p, m), and λ∗ (p, m).
We are not sure whether the solution maximizes the objective function. In principle we need the
second order condition to verify this. We temporarily do not talk about the second order condition
here, as it involves some linear algebra. We will talk about this point when necessary.
In practice, under some conditions we can make sure that the solution from FOC is the maximizer
of the problem. I write a very popularly used case in the following proposition.
Proposition 6 If function U (x1 , x2 ) is strictly concave in (x1 , x2 ) and p and m are positive, then
the solution to FOC maximizes the objective function.
In this course, we usually assume that the utility function and production function are concave.
So this proposition can be used to check whether the solution to FOC is enough to guarantee a
maximum.
4.2.3
Envelope Theorem
Similarly, we can consider the effect of a change of exogenous variables (p,m) on the objective
function, in the case of constrained optimization.
Proposition 7 Suppose the Lagrangian function for a maximization problem can be written as
L(x, a) and x∗ (a) and V (a) are the associated maximizer and value function. Then we have
∂L(x, a)
∂V (a)
=
|x=x∗ (a)
∂a
∂a
Example 3 (Envelope theorem in utility maximization)
16
(15)
In the maximization problem defined in equation 11, the envelope theorem says that
∂L(x, p, m)
∂V (p, m)
=
|x=x∗ (p,m) = −λ∗ (p, m)x∗ (p, m)
∂pi
∂pi
∂V (p, m)
∂L(x, p, m)
=
|x=x∗ (p,m) = λ∗ (p, m)
∂m
∂m
We will use these two equations many times in consumer theory.
17
(16)
(17)