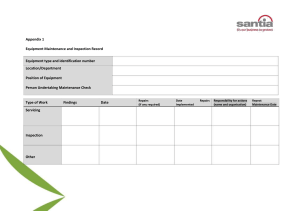
Worked Example RBI and Bayes’ theorem “... we balance probabilities and choose the most likely. It is the scientific use of the imagination ... ” Sherlock Holmes, The Hound of the Baskervilles. AC Doyle, 1901. copyright © riccardo.cozza@gmail.com 1 Introduction (1) Bayes’ rule is a rigorous method for interpreting evidence in the context of previous experience or knowledge. It was discovered by Thomas Bayes (c. 1701-1761), and independently discovered by Pierre-Simon Laplace (17491827). After more than two centuries of controversy, during which Bayesian methods have been both praised and pilloried, Bayes’ rule has recently emerged as a powerful tool with a wide range of applications, which include: genetics , linguistics , image processing, brain imaging, cosmology, machine learning, epidemiology, psychology, forensic science, human object recognition, evolution , visual perception, ecology and even the work of the fictional detective Sherlock Holmes . Historically, Bayesian methods were applied by Alan Turing to the problem of decoding the German enigma code in the Second World War, but this remained secret until recently. In essence, Bayes’ rule provides a method for not fooling ourselves into believing our own prejudices, because it represents a rational basis for believing things that are probably true, and for disbelieving things that are probably not. Note (1): “Bayes’ Rule - A Tutorial Introduction to Bayesian Analysis –” James V Stone 2 RBI and Bayes’ theorem RBI uses Bayes’ theorem to update the prior knowledge of the degradation rate with the information gained from an inspection. Prior Probability Damage Detection Probability Bayes theorem Inspection Data Posteriori Probability Since it can be very difficult to find a representative continuous prior density for the degradation rate such that the posterior is easily calculated, RBI uses a discrete version of Bayes’ theorem. 3 RBI and Bayes’ theorem Damage State In RBI three generic damage states are defined. They are noted 1, 2 and 3 in increasing gravity order that are a priori susceptible to occur. Damage State Range of actual damage state The damage in the equipment is “no” worse than what 1 is expected based on damage rate models or Predicted "rate" or less experience. The damage in the equipment is “somewhat” worse 2 than anticipated. This level of damage is sometimes Predicted "rate" to two times "rate" seen in similar equipment items. The damage in the equipment is “considerably” worse than anticipated. This level of damage is rarely seen in 3 Two to four times predicted "rate" similar equipment items, but has been observed on occasion industry wide. 4 RBI and Bayes’ theorem Inspection Effectiveness The probability of detection of a damage involves directly the inspection effectiveness notion. This effectiveness evaluation implements results obtained from several statistical analysis developed by organisms like Nordtest Europe, EPRI Nippon steel or US Navy. Those tests, aiming to determine the probability of detection (POD) of different non destructive tests, are conducted using tests on standard block. More precisely, those tests allow to determine a given inspection effectiveness probability to reveal the equipment actual damage state. Then, detection effectiveness, which depends on the appropriateness of the selected inspection method with the searched potential damage mechanism, is linked with the three generic damage states. The detection effectiveness is the probability to actually detect the expected state. Inspection Qualitative Inspection Category Effectivness Category A Highly Effective B Usually Effective C Fairly Effective D Poorly Effective E Ineffective Description Highly Effective The inspection methods will correctly identify the true damage state in nearly every case (or 80–100% confidence). Usually Effective The inspection methods will correctly identify the true damage state most of the time (or 60–80% confidence). Fairly Effective The inspection methods will correctly identify the true damage state about half of the time (or 40–60% confidence). Poorly Effective The inspection methods will provide little information to correctly identify the true damage state (or 20–40% confidence). The inspection method will provide no or almost no information that will correctly identify the true damage state and are considered ineffective for detecting the specific damage mechanism (less then 20% confidence) 5 RBI and Bayes’ theorem Inspection Effectiveness 1 2 3 Range of actual damage state Predicted "rate" or less Predicted "rate" to two times "rate" Two to four times predicted "rate" Poorly/Ineffective Fairly Effective 0,6 0,4 0,6 0,50 0,4 0,30 0,2 0,33 0,33 0,10 1 2 3 4 Damage rate factor 5 0,70 0,6 0,4 1 2 3 Damage rate factor 4 5 0,6 0,4 0,20 0,15 0,2 0,03 0,0 0 Higly Effective 0,80 0,8 0,05 0,0 0 Usually Effective 0,2 0,17 0,0 1,0 0,8 Density 0,8 Density Density 0,8 0,2 1,0 1,0 1,0 Density Damage State Likelihood that inspection result determines the true damage state Poorly or Fairly Usually Higly Ineffective Effective Effective Effective 0.33 0.5 0.7 0.8 0.33 0.3 0.2 0.15 0.33 0.2 0.1 0.05 0,0 0 1 2 3 Damage rate factor 4 5 0 1 2 3 4 5 Damage rate factor 6 RBI and Bayes’ theorem Bayes’ theorem RBI uses Bayes’ theorem to update the prior knowledge of the degradation rate with the information gained from an inspection. Since it can be very difficult to find a representative continuous prior density for the degradation rate such that the posterior is easily calculated, RBI uses a discrete version of Bayes’ theorem: k (ri r ) = where: • • • • • • • L k (r | ri ) * k −1 (ri ) L k (r | r1 ) * k −1 (r1 ) + L k (r | r2 ) * k −1 (r2 ) + L k (r | r3 ) * k −1 (r3 ) i = 1, 2, 3 ≡ damage state; k = 1,…,m ≡ time step; m = number of time steps considered in the planning horizon; r = observed corrosion rate estimated from inspection; r1 = r , r1 = 2*r , r1 = 4*r = corrosion rates related to damage states 1, 2 and 3, respectively; πk-1(ri) = prior probability of the damage state i at time k; Lk(r|ri) = likelihood of observing the result r of an inspection performed at k given that the equipment item is under the damage state i; • πk(r|ri) ≡ posterior distribution for the damage state k. Note that πk(r|ri) becomes the prior distribution when the next inspection takes place, which permits the Bayesian updating of the degree of confidence on r. The likelihood Lk(r|ri) depends on the effectiveness of the inspection technique. Indeed, the Table on pag. 5 quantitatively expresses this classification as the likelihood that the observed damage state (collected from an inspection program) actually represents the true state. Thus, the above equation, provides a manner to update the degree of confidence based on the inspection effectiveness. In this way, it is expected that the knowledge acquired from the inspection program reduces the uncertainty about the actual deterioration state of the equipment 7 RBI and Bayes’ theorem Prior distribution Information Sources for Damage Rate We start with a first estimation of the equipment state, according to the available data reliability. For example, we have High Confidence Data. Low Confidence Data • Published data. • Corrosion rate tables. • “Default” values. Although they are often used for design decisions, the actual corrosion rate that will be observed in a given process situation may significantly differ from the design value. Moderate Confidence Data High Confidence Data Laboratory testing with simulated process conditions. Limited in-situ corrosion coupon testing. Corrosion rate data developed from sources that simulate the actual process conditions usually provide a higher level of confidence in the predicted corrosion rate. Extensive field data from thorough inspections. Coupon data, reflecting five or more years of experience with the process equipment (assuming no change in process conditions has occurred). If enough data are available from actual process experience, there is little likelihood that the actual corrosion rate will greatly exceed the expected value under normal operating conditions. 8 RBI and Bayes’ theorem Inspection updating We start with a first estimation of the equipment state, according to the available data (a priori estimation). For example, we have High Confidence Data. A priori Damage Rate Range Low Confidence Data Confidence in Predicted Damage Rate Moderate Confidence Data High Confidence Data 0.5 0.7 0.80 0.3 0.2 0.15 0.2 0.1 0.05 Predicted "rate" or less Predicted "rate" to two times "rate" Two to four times predicted "rate" 1,0 1,0 Moderate Confidence Data Low Confidence Data 0,8 0,50 0,4 0,30 0,2 0,6 0,4 1 2 3 Damage rate factor 4 5 0,4 0,15 0,03 0,0 0 0,6 0,2 0,05 0,0 High Confidence Data 0,20 0,2 0,10 0,80 0,8 0,70 Density 0,6 Density Density 0,8 1,0 0,0 0 1 2 3 Damage rate factor 4 5 0 1 2 3 4 5 Damage rate factor 9 RBI and Bayes’ theorem Inspection updating For example, we have “Usually effective” inspection, The first inspection has confirmed the expectation damage rate (state 1). Conditional Probability of Inspection Predicted "rate" or less Predicted "rate" to two times "rate" Two to four times predicted "rate" Lk(r|ri) “E” None or Ineffective “D” Poorly Effective “C” Fairly Effective “B” Usually Effective “A” Highly Effective 0.33 0.4 0.5 0.7 0.9 0.33 0.33 0.3 0.2 0.09 0.33 0.27 0.2 0.1 0.01 In these conditions, before inspection, we have the following probabilities: Prior probability π0(ri) 1 2 3 0.80 0.15 0.05 Damage detection probability L1(r|ri) 0.7 0.2 0.1 Usually Effective 0,8 Density Damage State 1,0 0,70 0,6 0,4 0,20 0,2 0,05 0,0 0 1 2 3 Damage rate factor 4 5 10 RBI and Bayes’ theorem Posteriori distribution After the inspection, confirming the expectation damage rate (State 1), using Bayes theorem: 1 (r1 r ) = L1 (r | r1 ) * 0 (r1 ) 0.7 * 0.80 = = 0.941 L1 (r | r1 ) * 0 (r1 ) + L1 (r | r2 ) * 0 (r2 ) + L1 (r | r3 ) * 0 (r3 ) 0.7 * 0.80 + 0.2 * 0.15 + 0.1* 0.05 1 (r2 r ) = L1 (r | r2 ) * k −1 (r2 ) = 0.050 L1 (r | r1 ) * 0 (r1 ) + L1 (r | r2 ) * 0 (r2 ) + L1 (r | r3 ) * 0 (r3 ) 1 (r3 r ) = L1 (r | r3 ) * 0 (r3 ) = 0.008 L1 +18% (r | r1 ) * 0 (r1 ) + L1 (r | r2 ) * 0 (r2 ) + L1 (r | r3 ) * 0 (r3 ) 1,0 0,94 A priori evaluation 0,9 0,8 Posteriori evaluation (Probability Bayes Update) 0,80 Probability 0,7 0,6 0,5 0,4 0,3 -67% 0,2 -84% 0,15 0,1 0,0 0,05 1 2 0,05 0,01 3 Damage status 11 RBI and Bayes’ theorem Posteriori distribution If, on the other hand, the inspection has not confirmed the expectation damage rate, using Bayes theorem : ( ) k ri r = L k (r | ri ) * k −1 (ri ) L k (r | r1 ) * k −1 (r1 ) + L k (r | r2 ) * k −1 (r2 ) + L k (r | r3 ) * k −1 (r3 ) Damage State Π0(ri) 0.80 0.15 0.05 Not 1 Not 2 Not 3 Π0(r̅i) (1-0.80)/((1-0.8)+(1-0.15)+(1-0.05)) = 0.100 (1-0.15)/((1-0.8)+(1-0.15)+(1-0.05)) = 0.425 (1-0.05)/((1-0.8)+(1-0.15)+(1-0.05)) = 0.475 ( ) L1 (r | r1 ) * 0 (r1 ) 0.7 * 0.1 = = 0.345 L1 (r | r1 ) * 0 (r1 ) + L1 (r | r2 ) * 0 (r2 ) + L1 (r | r3 ) * 0 (r3 ) 0.7 * 0.1 + 0.2 * 0.425 + 0.1* 0.475 ( ) L1 (r | r2 ) * 0 (r2 ) = 0.419 L1 (r | r1 ) * 0 (r1 ) + L1 (r | r2 ) * 0 (r2 ) + L1 (r | r3 ) * 0 (r3 ) ( ) L1 (r | r3 ) * 0 (r3 ) = 0.234 L1 (r | r1 ) * 0 (r1 ) + L1 (r | r2 ) * 0 (r2 ) + L1 (r | r3 ) * 0 (r3 ) 1 r1 r = 1 r2 r = 1 r3 r = -1% +245% 0,5 0,345 0,425 0,419 Not 1 A priori evaluation 0,475 0,234 0,100 0,0 -51% Not 2 Not 3 Probability Bayes Update ( ) π k ri r = π k (ri | r ) 1,5 -57% Probability Probability 1,5 1,0 Damage detection probability L1(r|ri) =L1(r̅|r̅i) 0.7 0.2 0.1 State Corrosion rate probability 1,0 0,5 +180% 0,800 +368% 0,420 0,345 0,150 0,234 0,050 0,0 1 A priori evaluation 2 3 Probability Bayes Update 12 RBI and Bayes’ theorem Posteriori distribution: confirming vs. not confirming damage state 1,0 Posteriori evaluation the inspection has confirmed the expectation damage rate Probability 0,8 1,0 0,8 0,94 0,6 0,4 0,2 0,05 A priori evaluation 0,80 1 0,6 2 3 Damage status 0,4 1,0 0,15 0,2 Posteriori evaluation 0,05 0,8 0,0 1 2 3 Damage status the inspection has not confirmed the expectation damage rate Probability Probability 0,01 0,0 0,6 0,42 0,4 0,35 0,23 0,2 0,0 1 2 3 Damage status 13 Back up copyright © riccardo.cozza@gmail.com 14 RBI and Bayes’ theorem Confidence in predicted Damage Rate: Low Reliability Data 62,9% 68,5% 73,5% 77,8% 25,7% 23,1% 20,4% 17,8% 11,5% 8,4% 6,1% 4,4% 100% 65,8% 78,1% 86,6% 91,9% 95,2% 23,7% 16,9% 11,2% 7,1% 4,4% 10,5% 5,0% 2,2% 0,9% 0,4% 100% 50,0% 50,0% 56,7% 81,5% 30,0% 30,0% 28,0% 15,4%3,1% Inspection number 6 20,0% 15,3% A priori 97,1% 1 2 3 4 5 20,0% A priori Inspection Effectiveness: POORLY 81,40% 94,59% 98,51% 99,59% 13,95% 4,63% 1,38% 0,40% 4,65% 0,77% 0,11% 0,02% 1 2 3 4 5 6 Inspection Effectiveness: FARLY 99,88% 0,11% 0,00% 100% 50,00% 93,95% 99,40% 99,94% 99,99% 5,64% 0,60% 0,06% 0,01% 0,42% 0,00% 0,00% 0,00% 100,00% 0,00% 0,00% 100% 50,00% 99,97% 30,00% 100,00% 30,00% 20,00% A priori 2,7% 0,2% Inspection number 1 2 3 4 5 Inspection Effectiveness: USUALLY 6 0,03% 0,00% Inspection number 20,00% A priori 1 2 3 4 5 6 0,00% 0,00% Inspection number Inspection Effectiveness: HIGHLY Damage state 1 Damage state 2 Damage state 3 15 Probability of Detection (2) Consider the potential results of an inspection of N specimens. N total specimens N=N1+N2 N1 specimens containing cracks A1 cracks are detected (correct rejection) N2 specimens are un-cracked A2 cracks are undetected (incorrect acceptance) A3 cracks are detected (false rejection) Type II error (safety problem) Type I error (economic problem) A4 no cracks are detected (correct acceptance) N1 specimens contain A1 + A2 cracks, while N2 specimens are uncracked (N = N1 + N2). Four possible results of the N1 cracked and N2 uncracked specimens can be used to define the following quantities: • • • • Probability of detection (POD)= sensitivity of detection = A1/N1 Probability of recognition (POR) = A4/ N2 False-call probability (FCP) = A3/ N2 Accuracy of the observer = (A1 + A4)/N Note (2): “Fundamentals of Structural Integrity” Alten F. Grandt Jr. 16