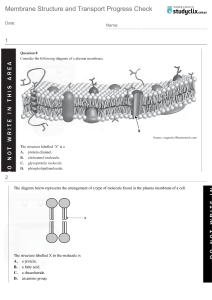
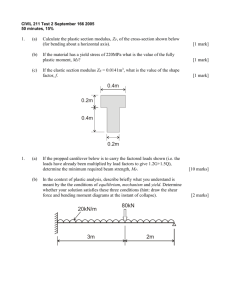
1 DBA Design by Analysis Design by Analysis Page 2.1 2. Design by Analysis The aim of this section is to summarise issues related to the current use of design by analysis in order to put the new European rules in context. The concept of design by analysis was first formulated in the US ASME Pressure Vessel and Boiler Code in the early 1960’s; with almost forty years of use various critical problem areas have arisen, most of which have been addressed in the new European rules. These problem areas are discussed in the following since they highlight implicit difficulties with an apparently simple and straightforward set of design rules. In the following the approach devised by ASME is briefly summarised, followed by a description of the usual methods by which the rules are implemented and a discussion of the problem areas which arise. After this the differences in implementation of design by analysis rules in the European Standard are described. 2.1 Design by analysis: the current Stress Categarisation route The design by analysis procedure is intended to guard against eight possible pressure vessel failure modes by performing a detailed stress analysis of the vessel. The failure modes considered are: 1. Excessive elastic deformation including elastic instability. 2. Excessive plastic deformation. 3. Brittle fracture. 4. Stress rupture/creep deformation (inelastic). 5. Plastic instability - incremental collapse. 6. High strain - low cycle fatigue. 7. Stress corrosion. 8. Corrosion fatigue. Most of the design by analysis guidelines given in the codes relates to design based on elastic analysis – this is the so-called elastic route. Essentially it was recognised when the rules were being developed that only elastic stress analysis was feasible. In the 1960s, most designers were restricted to linear elastic stress analysis, and in the case of pressure vessel design most analysis was defined in terms of elastic shell discontinuity theory (also known as the influence function method). The nature of elastic shell analysis impinges significantly upon the way the above failure modes are treated in the Code. Thus, rules were developed to help the designer guard against the various failure mechanisms using elastic analysis alone. These guidelines guard against three specific failure modes - gross plastic deformation, incremental plastic collapse (ratchetting) and fatigue. These failure modes are precluded by failure criteria based on limit theory, shakedown theory and fatigue theory respectively. It is essential to appreciate at the beginning, the excessive plastic deformation and incremental plastic collapse cannot be dealt with simply in an elastic analysis, as the failure mechanism is inelastic. In addition, the type of loading causing the stress can significantly affect the level of permissible stress. Ideally, these inelastic failure modes should be assessed by an appropriate analysis which adequately models the mechanism of failure. In this approach the designer is required to classify the calculated stress into primary, secondary and peak categories and apply specified allowable stress limits. The magnitude of the allowable values assigned to the various stress categories reflect the nature of their associated failure mechanisms, therefore it is essential that the categorisation procedure is performed correctly. 2 DBA Design by Analysis Design by Analysis Page 2.2 Stress categorisation (sometimes, classification) is probably the most difficult aspect of the design by analysis procedure and, paradoxically, the problem has become more difficult as stress analysis techniques have improved. When the design by analysis procedure was introduced, the dominant analysis technique in pressure vessel design was thin shell discontinuity analysis or the influence function method. This is reflected in the definitions of stress categories given in the Codes, which are based on the assumption of shell theory stress distributions; membrane and bending stress. It is therefore difficult to equate the calculated stresses and the code categories unless the design is based on shell analysis. The various stress categories are described first in the following: 2.1.1 Stress Categories The object of the elastic analysis is to ensure that the vessel has adequate margins of safety against three failure modes: gross plastic deformation, ratchetting and fatigue. This is done by defining three classes or categories of stress, which have different significance when the failure modes are considered. These three stress categories are assigned different maximum allowable stress values in the code: the designer is required to decompose the elastic stress field into these three categories and apply the appropriate stress limits. The total elastic stress which occurs in the vessel shell is considered to be composed of three different types of stress primary, secondary and peak. In addition, primary stress has three specific sub-categories. The ASME stress categories and the symbols used to denote them in the code are given below; (1) Primary Stress General Primary Membrane Stress, Pm Local Primary Membrane Stress, PL Primary Bending Stress, Pb (2) Secondary Stress, Q (3) Peak Stress, F and depend on location, origin and type. Before we can give a proper definition of these stresses, we must first give some terminology: Gross Structural Discontinuity: A gross structural discontinuity is a source of stress or strain intensification that affects a relatively large portion of a structure and has a significant effect on the overall stress or strain pattern or on the structure as a whole. Examples of gross structural discontinuities are: ∗ end to shell junctions, ∗ junctions between shells of different diameters or thickness, ∗ nozzles. Local Structural Discontinuity: A local structural discontinuity is a source of strain intensification that affects a relatively small volume of material and does not have a significant effect on the overall stress or strain pattern or on the structure as a whole. Examples of local structural discontinuities are: 3 ∗ ∗ ∗ DBA Design by Analysis Design by Analysis Page 2.3 small fillet radii, small attachments, partial penetration welds. Normal Stress: The normal stress is the component of stress normal to the plane of reference; this is also referred to as direct stress. Usually the distribution of normal stress is not uniform through the thickness of a part, so this stress is considered to be made up in turn of two components one of which is uniformly distributed and equal to the average value of stress across the thickness of the section under consideration, and the other of which varies with the location across the thickness. Shear Stress: The shear stress is the component of stress acting in the plane of reference. Membrane Stress: The membrane stress is the component of stress that is uniformly distributed and equal to the average value of stress across the thickness of the section under consideration. Bending Stress: The bending stress is the component of stress that varies linearly across the thickness of section under consideration. With this terminology as background, we now can define primary, secondary and peak stresses properly. Primary Stresses: A primary stress is a stress produced by mechanical loading only and is so distributed in the structure that no redistribution of load occurs as a result of yielding. It is a normal stress or a shear stress developed by the imposed loading, that is necessary to satisfy the simple laws of equilibrium of external and internal forces and moments. The basic characteristic of this stress is that it is not self-limiting. Primary stresses that considerably exceed the yield strength will result in failure, or at least in gross distortion. A thermal stress is not classified as a primary stress. Primary stresses are divided into ‘general’ and ‘local’ categories. The local primary stress is defined hereafter. Typical examples of general primary stress are: ∗ The average stress in a cylindrical or spherical shell due to internal pressure or to distributed live loads, ∗ The bending stress of a flat cover without supporting moment at the periphery due to internal pressure. Primary Local Membrane Stress: Cases arise in which a membrane stress produced by pressure or other mechanical loading and associated with a primary together with a discontinuity effect produces excessive distortion in the transfer of load to other portions of the structure. Conservatism requires that such a stress be classified as a primary local membrane stress even though it has some characteristics of a secondary stress. A stressed region may be considered as local if the distance over which the stress intensity exceeds 110% of the allowable general primary membrane stress does not extend in the meridional direction more than 0.5 times (according to BS5500 - 1 time according to ASME and CODAP) the square root of R times e and if it is not 4 DBA Design by Analysis Design by Analysis Page 2.4 closer in the meridional direction than 2.5 times the square root of R times e to another region where the limits of general primary membrane stress are exceeded. R and e are respectively the radius and thickness of the component. An example of a primary local stress is the membrane stress in a shell produced by external load and moment at a permanent support or at a nozzle connection. Secondary Stresses: Secondary stresses are stresses developed by constraints due to geometric discontinuities, by the use of materials of different elastic moduli under external loads, or by constraints due to differential thermal expansion. The basic characteristic of secondary stress is that it is self-limiting. Local yielding and minor distortions can satisfy the conditions that cause the stress to occur and failure from one application of the stress is not to be expected. Examples of secondary stresses are the bending stresses at dished end to shell junctions, general thermal stresses. Peak stresses: Peak stress is that increment of stress which is additive to the primary-plussecondary stresses by reason of local discontinuities or local thermal stress including the effects (if any) of stress concentration. The basic characteristic of peak stresses is that they do not cause any noticeable distortion and are only important to fatigue and brittle fracture in conjunction with primary and secondary stresses. A typical example is the stress at the weld toe. 2.1.2 Stress intensity Pressure vessels are subject to multiaxial stress states, such that yield is not governed by the individual components of stress but by some combination of all stress components. Most Design by Formula rules make use of the Tresca criterion but in the DBA approach a more accurate representation of multiaxial yield is required. The theories most commonly used to relate multiaxial stress to uniaxial yield data are the Mises criterion and the Tresca criterion. ASME chose the Tresca criterion for use in the design rules since it is a little more conservative than Mises and sometimes easier to apply. For simplicity we will consider a general three-dimensional stress field described by its principal stress components, which we will denote σ1, σ2 and σ3, and define the principal shear stresses: 1 τ 1 = (σ 2 − σ 3 ) 2 1 τ 2 = (σ 3 − σ 1 ) 2 1 τ 3 = (σ 1 − σ 2 ) 2 According to the Tresca criterion yielding occurs when 1 τ = max(τ 1, τ 2 , τ 3 ) = σ Y 2 where σY is the uniaxial yield stress obtained from tensile tests. 5 DBA Design by Analysis Page Design by Analysis 2.5 In order to avoid the unfamiliar (and unnecessary) operation of dividing both calculated and yield stress by two, a new term called "equivalent intensity of combined stress" or simply Stress Intensity was defined: Stress differences, S12, S23 and S31 are equated to twice the principal shear stress given above, such that: S12 = (σ 1 − σ 2 ) = τ 3 S23 = (σ 2 − σ 3 ) = τ 1 S31 = (σ 3 − σ 1 ) = τ 2 The Stress Intensity, S is then defined as the maximum absolute value of the stress differences, that is S = max (|S12|, |S23|, |S31|), so that the Tresca criterion reduces to: S = σY Once an analysis has been performed, the Stress Intensity for each stress category is evaluated and used in the design stress limits. 2.1.3 Stress limits The primary stress limits are provided to prevent excessive plastic deformation and provide a factor of safety on the ductile burst pressure (ductile rupture) or plastic instability (collapse). The primaryplus-secondary stress limits are provided to prevent progressive plastic deformation leading to collapse, and to validate the application of elastic analysis when performing the fatigue analysis. The allowable stresses in the Codes are expressed in terms of design stress Sm. The tabulated values of Sm given in the Code are based on consideration of both the yield stress and ultimate tensile strength of the material. Sm is notionally two-thirds of the "design" yield strength σY. Code allowable stresses for primary and secondary stress combinations are shown in the following table in terms of both Sm and σY. ALLOWABLE STRESS STRESS INTENSITY 2/3 k σY General primary membrane, Pm k Sm Local primary membrane, PL 1.5 k Sm k σY Primary membrane plus bending 1.5 k Sm k σY 3 Sm 2 σY (Pm + PB) or (PL + Pb) Primary plus secondary (Pm + PB + Q) or (PL + Pb + Q) 6 DBA Design by Analysis Design by Analysis Page 2.6 In addition to these allowables, when fatigue is considered relevant the total sum of (PL+Pb+Q+F) should be less than an allowable fatigue stress intensity range, Sa. The value of the k factor depends on the load combinations experienced by the vessel. For load combinations including design pressure, the dead load of the vessel, the contents of the vessel, the imposed load of the mechanical equipment and external attachment loads the k factor has a value of 1. When earthquake, wind load or wave load are added to the above, a k value of 1.2 is used. Special limits are also stipulated for hydraulic testing. Under design load conditions k = 1 and the maximum value of the primary stress combinations is yield the yield stress of the material. Primary stress is yield limited to ensure gross plastic deformation does not occur. The primary plus secondary stress combinations have a much higher allowable stress: twice the yield stress of the material. Primary plus secondary stress is limited to ensure shakedown of the vessel. Because of the different allowable values for primary and primary plus secondary stress, it is essential that the calculated elastic stress is correctly decomposed into the various categories. This is one of the most difficult problems encountered in DBA and has potentially critical effect on the final design. If primary stresses are classified as secondary the design may be unsafe, whilst if secondary stresses are classified as primary the design will be over-conservative. The code provides explicit classification guidance for certain typical vessel geometries and load through Table 4.120.1 Classification of stresses for some typical cases. In situations other than these cases the designer must rely on the basic code definitions of primary, secondary and peak stress and his own judgement to properly classify the elastic stress. In fact some of the stress classifications recommended in Table 4.120.1 have been in doubt for some time, and must be used with care. 2.2 Design by Analysis: the ASME inelastic route The ASME VIII Division 2 rules for inelastic analysis are given in Appendix 4-136 Applications of Plastic Analysis. These rules “provide guidance in the application of plastic analysis and some relaxation of the basic stress limits which are allowed if plastic analysis is used.” The rules for inelastic analysis considered here pertain to calculation of permissible loads for gross plastic deformation only. Rules are given in the Code for shakedown analysis but in practice shakedown analysis is difficult and it is simpler to apply the 3Sm limit to an elastic analysis. Two types of analysis may be used to calculate allowable loads for gross plastic deformation: limit analysis and plastic analysis. Limit analysis is used to calculate the limit load of a vessel. By definition, the analysis is based on small deformation theory and an elastic-perfectly plastic (or rigid-perfectly plastic) material model. Plastic analysis is used to determine the plastic collapse load of a vessel. The analysis is based on a model of the actual material stress-strain relationship and may assume small or large deformation theory as required. Material models can vary in complexity (or degree of approximation) from simple bilinear kinematic hardening models to more complex curves defining the actual stress-strain curve in a piecewise continuous manner. Including strain hardening in the analysis may give a higher plastic collapse load than the limit load but in the design by analysis procedure the allowable load is dependent on the criterion of plastic 7 DBA Design by Analysis Design by Analysis Page 2.7 collapse used. Including large deformation effects in the analysis may increase or decrease the calculated allowable load depending on the geometry of the vessel. Some structural configurations exhibit geometrical strengthening when non-linear geometry is considered whilst others exhibit geometric weakening. The expression ‘plastic collapse load’ is to some extent a misnomer, as a real vessel may not physically collapse at this load level, hence the ‘plastic collapse load’ is often referred to simply as the ‘plastic load’. 2.2.1 Limit analysis ASME VIII Division 2 Appendix 4-136.3 Limit Analysis states: “The limits on general membrane stress intensity ...local membrane stress intensity ... and primary membrane plus primary bending stress intensity ... need not be satisfied at a specific location if it can be shown by limit analysis that the specified loadings do not exceed two-thirds of the lower bound collapse load. The yield strength to be used in these calculations is 1.5Sm.” Thus allowable load Pa is Pa = 2 PLim where PLim is the limit load of the vessel. 3 Clearly, if the limit load can be calculated this procedure is much simpler to apply than the elastic analysis stress categorisation procedure. However, there are two additional requirements that must be satisfied when applying this approach. Firstly, the effects of plastic strain concentrations in localised areas of the structure such as points where plastic hinges form must be assessed in light of possible fatigue, ratchetting and buckling failure. Secondly, the design must satisfy the minimum wall thickness requirements given in the design by rule section of the Code. In effect, the design by rule formulae for wall thickness have priority over design by analysis calculations. 2.2.2 Plastic analysis ASME VIII Division 2 Appendix 4-136.5 Plastic Analysis states: “The limits of general membrane stress intensity ...local membrane stress intensity ... and primary membrane plus primary bending stress intensity ... need not be satisfied at a specific location if it can be shown by limit analysis that the specified loadings do not exceed two-thirds of the plastic analysis collapse load determined by application of 6-153, Criterion of Collapse Load (Appendix 6) [Mandatory Experimental Stress Analysis], to a load deflection or load strain relationship obtained by plastic analysis.” Thus allowable load Pa is Pa = 2 PP , where PP is the plastic load of the vessel. 3 Calculating plastic loads is more problematic than calculating limit loads as no rigorous definition of what constitutes a plastic load is given. Instead, the twice elastic slope criterion as used in experimental analysis is prescribed. 8 DBA Design by Analysis Design by Analysis Page 2.8 2.3 Analysis methods for the ASME approach Design by analysis procedures do not specify particular implementation tools: it has been left to the analysts to choose the technique they feel most appropriate. Shell discontinuity analysis was the primary tool in the early days of design by analysis, where stresses could easily be categorised in terms of shell-type membrane and bending stress. By now analysis techniques have developed significantly and although shell discontinuity analysis is still used very often in structural analysis, it is replaced more and more by computer based numerical methods. The most widely used technique in contemporary pressure vessel design is the finite element method, a powerful technique allowing the detailed modelling of complex vessels. Shell discontinuity analysis and the finite element method are discussed in relation to pressure vessel design by analysis in the following sections. 2.3.1 Shell discontinuity analysis Shell discontinuity analysis was the primary means of stress analysis in the early days of design by analysis procedures. Although largely replaced by finite element analysis, shell discontinuity analysis remains a useful tool for simple geometries, and indeed many engineering software companies still supply programs for discontinuity analysis. V Forces H u q Semi-infinite cylinder Cone Displacements v Hemisphere Flat end Figure 2.1.: Shell discontinuity forces and moments. Shell discontinuity analysis is primarily used to evaluate shell membrane and bending stresses for axisymmetric vessels under internal pressure. It makes use of the fact that typical vessel configurations are composed of regular parts - spheres, cylinders, cones and flat ends in particular. For pressure loading, simple regular shapes exhibit mainly membrane stress. However, at junctions local bending (and additional membrane) stresses are generated. These stresses are called discontinuity stresses for obvious reasons. Shell discontinuity analysis allows these junction 9 DBA Design by Analysis Design by Analysis Page 2.9 stresses, and their effect in the vessel, to be readily calculated using a simple engineering force method. This force method uses analytical solutions for the local bending and shear stress close to junctions which allow so-called edge forces and moments to be related to edge displacements and rotations, Figure 2.1. These edge relations are evaluated for each part of the vessel and then assembled at junctions. Continuity of displacement and rotation between parts then allows the edge forces and moments at the junction to be derived and finally the stresses in the various parts can be calculated. 2.3.2 Finite Elements for Pressure Vessel Analysis In creating a model, element selection and mesh definition are crucial aspects of finite element analysis. The type of element used in a finite element analysis for pressure vessel design can greatly influence the design procedure, so a brief overview is given here. Most commercial programs include large finite element libraries, however, in pressure vessel design the most common element types are 3-D solid, axisymmetric and shell elements. 2.3.2.1 3-D Solid Elements Solid (or continuum) elements are based on the mathematical theory of elasticity, which describes the behaviour of a deformable component under load assuming small deformation and strain. The most general theory is three dimensional, but under specific circumstances certain two dimensional reductions are possible. 3-D solid elements are used to model real three-dimensional structures such as the part model of a nozzle-vessel intersection shown in Figure 2.2. Figure 2.2: 3-D solid model of a nozzle-vessel intersection. 10 DBA Design by Analysis Page Design by Analysis 2.10 Elastic 3-D solid elements are based on 3-D elasticity theory. A general system of forces acting on a three dimensional elastic body sets up internal forces within the body, which vary with position throughout the body. The state of stress at a point in the body is fully defined by six components: Direct stresses: σx, σy, σz Shear stresses: τxy, τyz, τzx σY as illustrated in Figure 2.3. Three degrees of freedom are defined at each node of a 3-D solid element: orthogonal displacements ux, uy and uz. Displacement throughout the domain of the element is defined in terms of these nodal displacements by the interpolation functions used in the element formulation. Most commercial finite element packages offer solid elements based on two different orders of interpolation: • τ XY τYZ τ XY σX τYZ σZ Y Z τ ZX τZX X Figure 2.3: Stresses acting on a differential cube of 3-D elastic continua. 8 node linear element: Figure 2.4. Each element has 24 (8 node x 3) associated degrees of freedom. uy 8 NODE LINEAR ux uz ISOPARAMETRIC 3-D SOLID BRICK ELEMENT Deformed geometry Y X Z Original geometry ELEMENT DEFORMATION Figure 2.4: Linear 3-D solid brick element Edges/sides must be straight/ plane before deformation, as the geometry is defined by linear equations. When the element is loaded it deforms such that the sides remain straight, as the displacements of the element are also defined by linear equations. 11 • DBA Design by Analysis Page Design by Analysis 2.11 20 node quadratic element: Figure 2.5. ORIGINAL GEOMETRY STRAIGHT SIDES Deformed geometry 20 NODE QUADRATIC ISOPARAMETRIC 3-D SOLID BRICK ELEMENT Original geometry ELEMENT DEFORMATION ORIGINAL GEOMETRY QUADRATICALLY CURVED SIDES Figure 2.5: Quadratic 3-D solid brick element. Each element has 60 (20 nodes x 3) associated degrees of freedom. Edges/sides may be defined as quadratic curves/surfaces, as the geometry of the element is defined by quadratic interpolation. This means that the 20 node brick can more closely model the true shape of a curved body than the simpler 8 node element. When the 20 node element is loaded the sides may deform quadratically, as the displacements of the element are also defined by quadratic interpolation. Both 8 node and 20 node brick elements may be degenerated to give elements of wedge and tetrahedron shape by defining two or more nodes at the same position, as shown for the 8 node element in Figure 2.6. In general, degenerate elements do not perform as well as the brick elements, however they can be used to model areas of a structure which cannot be meshed using brickshaped elements. Solid elements based on tetrahedral geometry (as opposed to being degenerate bricks) are also available in many finite element programs. 4 NODES BRICK 2 NODES 2 NODES TETRAHEDRON WEDGE OR PRISM Figure 2.6: Degenerating brick geometry to give wedge and tetrahedron geometry 3-D solid elements can, hypothetically, be used to model any type of structure but well-designed 3-D solid models are usually large in terms of computing requirements. Hardware limitations etc. tend to restrict their use to situations where simplified models (as discussed below) are not viable; for example, thick non-axisymmetric vessels, thick axisymmetric vessels under non-axisymmetric boundary conditions (loading and support) or perhaps thinner vessels with unusual or significant geometric details. Modern finite element programs make it relatively simple (although perhaps time-consuming) to create complex 3-D models of pressure vessels. The most significant problem in practical design by analysis using solid models is not in model creation but interpretation of the results of the analysis in the light of code requirements. 12 DBA Design by Analysis Page Design by Analysis 2.12 As stated above, solid elements are based on elasticity theory, in which stress at a point is defined in terms of six stress components: σx, σy, σz, τxy, τyz, τzx. These stresses vary continuously throughout the body and in thick pressure components the through-wall distribution is non-linear. This form of stress distribution is significantly different from that envisaged when design by analysis was first implemented, which implicitly assumed a linear through thickness, shell-type stress distribution that could be decomposed into membrane and bending constituents. This incompatibility in format between the stresses calculated in the solid model and those required for design by analysis procedures often makes it extremely difficult for the designer to classify the calculated stresses as primary, secondary and peak and apply the appropriate category stress limits. 2.3.2.2 Axisymmetric Elements Whilst, ideally, all three dimensional structures can be modelled using 3-D solid elements to a greater or lesser degree of accuracy, it is not always necessary to perform a complete three dimensional analysis. In certain classes of structure, advantage can be taken of the structure geometry and loading to reduce the problem to two dimensions. Such structures can be analysed using much simpler and smaller finite element models. Y r The most useful class of three-dimensional vessel which can be analysed using two-dimensional elements is the body of revolution. Here geometric and material properties are symmetric about the symmetry axis subject to loading symmetric about the symmetry axis, as illustrated for an example structure in Figure 2.7. X Z Figure 2.7: Axisymmetric structure. This type of structure is called an axisymmetric structure. In finite element practice the component geometry is defined so that the Y axis is the axis of rotational symmetry. For convenience, the geometry, loading, stresses and strains of the component are defined in polar co-ordinates: distance r in the radial direction R from the origin, circumferential or hoop position θ in the circumferential direction Θ and meridional or height position y in the axial direction Y. When a rotationally symmetric body is loaded symmetrically about the symmetry axis - that is, loads are applied radially or vertically and uniformly with respect to circumferential position, as illustrated in Figure 2.8, points in the body can move radially in or out and vertically up or down. The material does not move sideways, in the Θ (hoop) direction, nor rotate as there are no loads causing the body to deform in this manner. ELEVATION PLAN Figure 2.8: Axisymmetric loading 13 DBA Design by Analysis Page Design by Analysis 2.13 As the points on any R-Y plane can move only in that plane, they have two degrees of freedom: radial displacement ur and vertical displacement uy. As the behaviour will be the same at all R-Y planes in the body, the behaviour of the entire component is fully defined if the behaviour of any such plane is defined. Consequently, in an axisymmetric analysis only a single 2-D section of body need be analysed. In finite element practice, axisymmetric models are created in the global X-Y plane, as shown in Figure 2.9. Y uy ux X Figure 2.9: Axisymmetric degrees of freedom The state of strain at a point in an axisymmetric body may be defined by considering the deformation defined above. As deformation is symmetric about the Y axis, no strains are present which would give rise to nonsymmetrical deformation. Thus, no shear strains can arise perpendicular to the X-Y plane. Under this condition, the number of stresses at a point reduces from six (3-D) to four: σx, σy, σθ, τry, as illustrated in Figure 2.10. Clearly, the form of stress distribution calculated in an axisymmetric solid analysis is similar to that calculated in 3-D analysis. Consequently, the same incompatibility exists between the form of calculated stress results and the form required by design by analysis rules as discussed for 3-D analysis above. Y u2 u1 σθ σy τ ry X σr σθ σr σy Figure 2.10: Axisymmetric element stresses. A range of axisymmetric solid elements are available in most commercial finite element programs, as illustrated in Figure 2.11. 14 DBA Design by Analysis Design by Analysis Page 2.14 The linear quadrilateral element has four nodes, each with two degrees of freedom. Thus, each linear element has 8 associated degrees of freedom, compared with 24 for a linear 3-D solid. The quadratic element has eight nodes with two degrees of freedom. Thus, each quadratic element has 16 associated degrees of freedom, compared with 60 for a linear 3-D solid. Clearly, the use of Y LINEAR TRIANGLE (CONSTANT STRAIN TRIANGLE) r X Z QUADRATIC TRIANGLE LINEAR QUAD QUADRATIC QUAD Figure 2.11: Typical elements for axisymmetric analysis. axisymmetric elements leads to smaller models in terms of degrees or freedom or, if preferred, permits a finer mesh for the same model size. An axisymmetric model of the 3-D nozzle intersection shown in Figure 2.2 is shown in Figure 2.12. The use of axisymmetric elements allows the analyst to produce a finer mesh through the thickness of the vessel wall without creating an excessively large model. Care must be taken when defining loads for axisymmetric models. Forces may be defined as a total applied force or on a per radian basis. The program user’s manual should be consulted to check the situation for the software in use. Y It is worth noting that many pressure vessel problems relate to axisymmetric structures Figure 2.12: Axisymmetric model of nozzle intersection. under non-axisymmetric loading. For linear elastic analysis, it is possible to treat this as an axisymmetric problem, and model the loading using Fourier series around the circumference. Some commercial finite element software offers this capability through modifications to the basic axisymmetric element, known as an harmonic element. X Solid elements are extremely versatile, powerful, and suitable for a wide range of applications. However, there are two significant factors which limit the use of solid elements in practical finite element analysis, particularly for pressure vessel problems. These are: 15 DBA Design by Analysis Design by Analysis Page 2.15 • The aspect ratio of solid elements should ideally be 1 - that is, the element is a cube - but in practice limited to 2 in the case of linear elements and 5 in the case of quadratic elements. • Solid elements do not respond well to bending loads, and at least three linear or two quadratic elements must be used through thickness when bending is present. Taken together, it becomes clear that these factors often make it impracticable to model thin shell structures such as the longitudinally supported vessel shown in Figure 2.13 using solid elements. Figure 2.13: Shell model of vessel. In general, shell structures are thin in one direction and carry both membrane (in-plane) and bending (out-of-plane) loads. The load-carrying capacity of a shell mainly is derived from its membrane strength, but it is impossible to construct real shell structures, such as pressure vessels, without inherent bending during loading - for example, the junction between a cylinder and a spherical end cap gives a discontinuity in curvature which induces a bending stress (called a discontinuity stress). Bending stresses can also result from mechanical and thermal loading - for example, piping forces on a nozzle. Several solid elements are required through the shell thickness to adequately represent bending behaviour but these elements cannot themselves be thin or they will violate aspect ratio requirements of the formulation. Consequently, a large number of solid elements are required in order to model even simple shell structures. These shell analysis problems are avoided by using special shell elements, which incorporate assumptions about the nature of the bending in the formulation. 16 DBA Design by Analysis Design by Analysis Page 2.16 2.3.2.3 Thin Shell Elements The traditional method of analysing shell structures is to simplify the behaviour of the structure by assuming an appropriate thin shell theory in which the behaviour of the three dimensional structure is described in terms of the deformation of a doubly curved reference surface. This reduces the number of degrees of freedom required to model the real behaviour of the structure as only one element is used through thickness. In addition, the definition of the finite element model is also considerably simplified, as only the mid-surface has to be defined and meshed with surface or area elements. However, the reduction of a real three dimensional shell structure to a reference surface model is considerably more complicated than reducing three dimensional elasticity to axisymmetry or plane strain, as discussed earlier. In general, shell structures are doubly curved and the radii of curvature are not constant throughout the body. Shell structures support both membrane forces, which act in the plane of the shell, and bending forces or moments which arise due to out-of-plane loading. These are shown diagrammatically in Figure 2.14. MEMBRANE MODES BENDING MODES The membrane and bending forces are Figure 2.14: Thin shell bending & membrane modes. coupled throughout the shell, but their relative magnitude differs with position in the structure. In certain locations membrane action may predominate, whilst in other locations, most notably at structural supports and discontinuities, bending becomes more significant. In flat plates and in the theory of shallow shells, membrane and bending actions can be sensibly de-coupled - this simplification allows a simpler element formulation, and for this reason flat plate elements are commonly used in the analysis of general shell structures. It is possible to simplify the real three-dimensional problem if certain assumptions are made about how the thin plate or shell deforms, particularly during bending. The most significant assumption of thin plate or shell theory is that straight lines initially perpendicular to the mid-surface remain straight during deformation, and follow either the Kirchhoff hypothesis or the Mindlin hypothesis. In the Kirchhoff hypothesis, when the shell deforms, straight lines normal to the mid-surface rotate, but so that they remain straight and normal to the deformed mid-surface, as illustrated in Figure 2.15. In the less restrictive (but more complex) Mindlin Hypothesis these lines are not required to remain normal during deformation, such that the influence of shear strain can be better represented. 17 DBA Design by Analysis Design by Analysis Page 2.17 PLANE SECTIONS REMAIN PLANE AND NORMAL TO THE NEUTRAL AXIS KIRCHHOFF HYPOTHESIS PLANE SECTIONS REMAIN PLANE BUT NOT NECESSARILY NORMAL TO THE NEUTRAL AXIS MINDLIN HYPOTHESIS Figure 2.15: Kirchhoff and Mindlin Hypotheses The Kirchhoff hypothesis is common in shell theory, and most published results for thin pressure vessels are based on this. However, some modern finite element formulations for thin shells use the Mindlin hypothesis, (essentially since numerical analysis is used and there is no need to be so restrictive). In addition, the Mindlin hypothesis represents shell behaviour more accurately in the vicinity of discontinuities and restraints, where transverse shear effects are more significant. The effect of using one of these simplifying hypotheses in the finite element method is that the deformation at any point can be defined if the displacement and rotation of the mid-surface are known. The rotation at any point on the mid-surface is defined by interpolating between rotational degrees of freedom defined at the nodes. Therefore beam, plate and shell elements have translational and rotational degrees of freedom. Only these bending elements have rotational degrees of freedom: solid elements do not need rotational degrees of freedom to define the element deformation (although it is possible to formulate solid elements which include rotational degrees of freedom to enhance performance but at the cost of increasing the number of degrees of freedom per element). A great deal of work has been undertaken on formulating shell elements, and it is an indication of the complexity of the problem that no single type of formulation has been universally accepted as being the best. Classical shell theory produces equations which are difficult to solve and which are remarkably sensitive to slight variations in shape (which are common in the approximate finite element method). A large number of different approaches have been developed over the years but basically only three types of shell element are used in practice: • Facet (flat) shell elements, formed by combining membrane and plate bending elements • Curved shell elements, based on classical shell theory • Reduced (or degenerate) solid (continuum) iso-parametric elements which directly take account of thinness and the Mindlin hypothesis in their formulation The most popular are flat elements and reduced solid elements, both of which appear in commercial software. 18 DBA Design by Analysis Design by Analysis Page 2.18 Flat (Plate) Elements The geometry of a doubly curved shell surface can be approximated by a faceted surface formed by connecting flat triangular elements together at their vertices. A flat three-noded triangular shell element would have six degrees of freedom per node: in an element co-ordinate system (x,y,z), as shown in Figure 2.16, there would be three translational degrees of freedom, (ux, uy, uz), and three rotational degrees of freedom, (φx, φy, φz), giving a total of eighteen degrees of freedom per element. This element can be used to represent a shell by including both membrane, (ux, uy, φz), and bending, (uz, φx, φy), degrees of freedom. Membrane stiffness is derived from simple plane stress conditions, with the added drilling degree of freedom, φz. The most significant aspect of the derived shell element is that the membrane and bending stiffness are uncoupled, although there is a degree of coupling when the elements are assembled. uz Y Z uy ux K Z Y X I X J Figure 2.16: Triangular flat plate element Used on their own, it has been found that triangular shell elements based on plate bending elements do not perform very well, having an artificially high bending stiffness and spurious torsion modes. Other flat shell elements have been formulated, among the most common of which is the BatozRazzaque element. This is a quadrilateral element formed from four flat shell elements such that the diagonals are continuous, Figure 2.17. This formulation works well and can be found in many commercial programs. Figure 2.17: Batoz Razzaque quadrilateral flat shell element 19 DBA Design by Analysis Design by Analysis Page 2.19 Reduced Continuum Elements The reduced continuum shell elements are similar to the 3-D solid elements discussed above but with the Mindlin hypothesis (plane sections remain plane or linear interpolation) applied through the thickness. Under this condition, if the deformation of the element mid-surface is known, the deformation at any other point can be defined through the element shape functions. In this way, the 3-D element is reduced to a shell-type area element. Such elements are usually called reduced continuum, or degenerate solid, or sometimes thick shell, elements. In practice, the element’s curved mid-surface is approximated from the given nodal co-ordinates and this can affect the performance and accuracy of this type of element if it has a poor shape. 2.3.2.4 Discussion At first sight the most appropriate choice of finite element may seem obvious for a given vessel under consideration. However when the choice is examined in the light of the pressure vessel design by analysis elastic route, where limits are placed on membrane and bending stress and stresses, or indeed parts of stresses, must be categorised, various well-known difficulties arise. These problem areas lie at the heart of criticism of the ASME design by analysis rules and consequently are discussed in more detail in the following: 2.4 Implementation Problems of the Stress Categorisation Route 2.4.1 Overview of Problems Once the linear elastic analysis of a part is complete and the immediate results for stresses and strains obtained, there is the need to satisfy the design by analysis rules. As mentioned previously this is not necessarily as straightforward as it may at first seem. Specifically, there is a requirement to obtain membrane and bending components of primary stress and the calculated stresses must be categorised. This does not present a problem in cases where the analysis utilises thin shells. However, for analysis (in particular finite element analysis) utilising solid models (2 or 3 dimensional) where the calculated stress can not be easily identified as membrane, bending or peak the problems of linearisation and categorisation become apparent. Difficulties implementing this area of the design by analysis rules have become increasingly evident to both designers and analysts[1]. This section examines the practical problems associated with the implementation of these design by analysis rules. 2.4.2 Linearisation The design by analysis criteria, as formulated nearly thirty years ago, is based on the behaviour of thin shells and includes the notion of membrane and bending stress. Inherent in this understanding is the assumption that membrane and bending stress act on a plane under the Kirchhoff hypothesis that plane sections remain plane during bending. The shell type membrane and bending stresses cause gross distortions under primary loads and strain enhancement under secondary loads. Most of our understanding of basic pressure vessel geometry and components come from our knowledge of their behaviour as thin shells. A consequence of this understanding is the possibility that portions of total stress, identified as membrane or bending (or peak) can be categorised as primary or secondary. 20 DBA Design by Analysis Page Design by Analysis For example, in the case of a nozzle in a spherical shell (Figure 2.18) with area compensated reinforcement, only the membrane stress is primary, despite significant bending in the shell close to the nozzle. The bending stress is secondary (since only the membrane stress and the hoop stress in the nozzle are required to satisfy equilibrium with the internal pressure). In this case, it is essential to consider membrane and bending stress for the correct categorisation. 2.20 Reinforcement M R BENDING t p Pm = pr t MEMBRANE r Pm is PRIMARY M R is SECONDARY Figure 2.18: Stress categories for a nozzle. l z o p If the analysis is based on thin shell finite elements, then there is no difficulty in identifying membrane and bending stress, as they are part of the underlying theory, Figure 2.19. TOP y x k m n i TOP TOP MID BOT MID BOT x y Difficulties arise when thin shell analysis is not used and the finite element analysis is based on axisymmetric or three-dimensional solid elements. Z X In general, unless the section is indeed thin, the Figure 2.19: Shell membrane and bending stress stresses on a through thickness line are not linear, and further plane sections do not remain plane during bending. Over the years it has become common practice to linearise the calculated through thickness stresses in order to separate membrane and bending components. j Y BOTTOM A technique for linearising stress was first suggested by Kroenke[2,3], and has been adopted in several finite element postprocessors. A stress classification line (or plane) or supporting line segment is chosen and the stresses are linearised along this line. The supporting line segment (SLS) or classification line is the smallest segment joining the two sides of the wall where the stress is to be linearised. Outside of gross structural discontinuity regions, the SLS is normal to the wall mean surface, i.e. its length is equal to the thickness of the wall in the analysis. There are difficulties with this procedure – which seems straightforward, but again is a fundamental difficulty - this will be discussed in more detail in the following. Pressure vessel design codes are not particularly helpful on the problem of linearisation. ASME III & VIII admit a non-linear bending stress, but also contains some ambiguities: bending stress is described as a normal stress - and it is bending stress that may need linearisation. In Paragraph NB-3215 a note is provided to the effect that “.. membrane stress intensity is derived from the stress components averaged across the thickness of the section. The averaging shall be performed at the component level ...”. This implies that only stress components may be linearised (by definition this could include shear stress), and not derived principal values. However, through omission from the 21 DBA Design by Analysis Page Design by Analysis 2.21 code, it may be argued that shear stress should not be linearised. Inclusion of shear stress linearisation will mostly affect the surface stress: in practice linearisation of the normal stress only is adopted to modify the surface stress in application of the design criteria. The basic procedure for stress linearisation is the selection of a stress classification plane or supporting line segment on which shell type stress will be evaluated. A stress classification line (or plane of referencesee page 31) is identified through a section and the non-linear stress distribution along this line is linearised in order to extract membrane and bending stress, as shown in Figure 2.20. The stress classification line (CL) lies along a local axis X3; the origin is located at the mid-point of the CL (i.e. at radius Rc); the abscissa of a point on the supporting line segment is designated x3. R X c 3 Stress classification line or supporting line segment of length h. Figure 2.20: Stress classification line In practice, the linearisation procedure is performed automatically by special postprocessors. For simplicity, some basic postprocessors (in particular self written ones) may require the finite element mesh to be created so that a line of nodes lie along the chosen classification line, making it relatively simple to extract stress results. In postprocessors that are more complex, the classification line need not pass through a line STRESS CLASSIFICATION of nodes. LINE The classification line in Figure 2.21 is defined from node Ni at the inner surface to No at the No Ni outer. The path of the classification line does not pass through a line of nodes: it cuts through the elements. Advanced linearisation postprocessors use the location of the surface nodes to define the path through the elements and then apply interpolation functions to the appropriate nodal stresses to calculate the stress along the path. Two possible procedures Figure 2.21: Interpolation of a classification line for linearisation have been suggested, Kroenke which has been discussed by numerous analysts[4] and a more refined version by Gordon[5]. 22 DBA Design by Analysis Page Design by Analysis 2.22 2.4.2.1 Kroenke’s Procedure Kroenke’s procedure makes reference to familiar beam bending stress - a uniaxial stress - and attempts to define an equivalent linear stress distribution on the classification line (CL). Consider a typical stress distribution along a classification line as in Figure 2.22. If x3 measures local distance along the classification line then the equivalent linearised stress is, (σ ) ij L = ax3 + b . The membrane stress component is given by the formula nonlinear stress σ distribution σp linearised stress b σb a σm classification line X3 x3 e/2 e/2 Figure 2.22: Typical Stress Distribution (σ ) ij m= b = 1 e e 2 e − 2 ∫ σ ij dx3 . The membrane force per unit length of the membrane stress component is equal to that from the calculated FE stress component. The bending stress component is given by (σ ) ij b = a ⋅ x3 = 12 x3 e3 e 2 e − 2 ∫ σ ij x3 dx3 . The maximum and minimum bending stresses can then be evaluated (for x3 = ± e / 2 ) 23 DBA Design by Analysis Design by Analysis (σ ) ij b , s 6 =± 2 e e 2 e − 2 ∫ Page 2.23 σ ij x3 dx3 The bending moment per unit length of the calculated FE stress component is equal to (σ ) ij b , s ⋅ e e2 = ∫ 2e σ ij x3 dx3 − 6 2 The linearised stress (σ ij )L is found by adding membrane and bending stresses (σ ) = (σ ) + (σ ) ij L ij m ij b The bending stress of this equivalent linear stress distribution vanishes at x3 = 0 . The peak value of stress at a point is the difference between the total stress and the sum of the membrane and bending stresses (σ ) = (σ ) − (σ ) = (σ ) − [(σ ) + (σ ) ] . ij p ij ij L ij ij m ij b 2.4.2.2 Gordon’s Procedure– for axisymmetric problems In Kroenke’s procedure for axisymmetric problems, the shell wall is assumed (locally) straight in the meridional direction. In some circumstances the meridional curvature is finite. Gordon suggested a modification to Kroenke’s procedure to allow for this. Gordon’s procedure for an axisymmetric case is the same, in principle, as the case above, except for the fact that there is more material at a greater radius than at a smaller radius. The neutral axis is shifted radially outward to accommodate for this. Consider the axisymmetric section of a vessel wall as shown in Figure 2.23. ρ is defined as the radius of curvature of the mid-surface of the shell. In the case of an axisymmetric straight section such as a cylinder or cone, ρ = ∞. Adopting the following notation: ρ − radius of meridional curvature R1 – radius of circumferential curvature z – axial co-ordinate r – radial co-ordinate θ – angle in hoop direction φ – angle in meridional direction X3 – local co-ordinate containing the classification line X2 – local co-ordinate normal to classification line x3 – co-ordinate along classification line e – shell thickness 24 DBA Design by Analysis Page Design by Analysis 2.24 R – radial co-ordinate of a point of the classification line Rc – radial co-ordinate of mid-surface point z R Rc X3 Axis of symm. φ X2 ρ e z R1 r centreline θ r Figure 2.23: Geometry for finite curvature From an axisymmetric analysis the following stresses would be obtained in the local classification line co-ordinates: σX2 - (local) meridional stress σX3 - (local) radial stress σθ - hoop stress σX2X3 - (local) shear stress The other shear stresses would be zero in an torsion-free axisymmetric analysis. The aim is to obtain membrane and bending components of these stresses, denoted by subscripts m and b respectively, evaluated from the average stress across the section and the beam type bending stress. The membrane component of the (local) meridional stress on the classification line is given by (σ ) X2 m = FX 2 AX 2 = e 2 e − 2 ∫ σ X 2 ⋅ (R1 + x 3 ) ⋅ ∆θ ⋅ dx3 R1 ⋅ ∆θ ⋅ e = e 2 e − 2 ∫ σ X 2 R ⋅ ∆θ ⋅ dx3 Rc ⋅ e ⋅ ∆θ 25 DBA Design by Analysis Design by Analysis Page 2.25 where the area AX 2 of a small segment extending over the angle ∆θ in hoop direction is given by A X 2 = Rc ⋅ e ⋅ ∆θ . In this linearisation the bending stress component of the (local) meridional stress on the classification line vanishes at x3 = x f , where x f is the x3 - co-ordinate of the resultant of a constant stress distribution σ X 2 and of the centroid of the considered area. x f is given by xf = e2 e 2 cosφ , = 12 R1 12 Rc thus the bending stress component is given by (σ ) X2 b = M X 2 ( x3 − x f ) Im , where M X 2 = ∫ 2e (x 3 − x f )σ X 2 R ⋅ ∆θ ⋅ dx3 e − 2 and e2 I m = Rc e ⋅ ∆θ ⋅ − x 2f , 12 which leads to (σ ) X2 b = x3 − x f e2 2 Rc ⋅ e − x f 12 e 2 ∫ (x 3 − x f )σ X 2 R ⋅ dx3 . e − 2 The hoop stress is evaluated in a similar manner to the above; however in this case the meridional curvature, ρ must be taken into account: The membrane component of the hoop stress is given by 26 DBA Design by Analysis (σ ) θ m = Fθ = Aθ Design by Analysis e 2 e − 2 ∫ σ θ ( ρ + x3 ) ⋅ ∆φ ⋅ dx3 = ρ ⋅ e ⋅ ∆φ e 2 1 σθ e ∫e − Page 2.26 x ⋅ 1 + 3 dx3 ρ 2 where the area Aθ of a small segment extending over die angle ∆φ in meridional direction is given by Aθ = ρ ⋅ e ⋅ ∆φ . In this linearisation the bending stress component of hoop stress on the classification line vanishes at x3 = xh , where x h is the x3 - co-ordinate of the resultant of a constant stress distribution σ θ and of the centroid of the considered area, where x h is given by xh = e2 . 12 ⋅ ρ Thus the bending stress component is given by (σ θ )b M θ ( x3 − x h ) , Ih = where e M θ = ∫ 2e ( x3 − x h ) ⋅ σ θ ⋅ ( ρ + x 3 ) ⋅ ∆φ dx3 , − 2 and e2 I h = ρ e ⋅ ∆ϕ ⋅ − x h2 , 12 which leads to (σ θ )b = x3 − x h e 2 e − x h 12 2 e 2 ∫ (x − e 2 3 x − x h )σ θ ⋅ 1 + 3 ⋅ dx3 . ρ 27 DBA Design by Analysis Design by Analysis Page 2.27 (Local) radial stress on the classification line is treated in a special way: in most situations the radial stress will equal the applied pressure at the internal surface and be free (zero) at the outer surface. Therefore, membrane stress may be evaluated, (σ ) 1 e2 X3 e σ X dx 3 e ∫− 2 3 but it is questionable whether a bending stress should be evaluated. Either this should be taken as zero = m (σ ) = 0 X3 b or as the simple difference between actual and averaged value (σ ) =σ X3 b X3 ( ) − σ X3 m which may not be linear. Similarly, an average membrane shear stress can be determined along the classification line (σ X 2X3 ) = m 1 2e e σ X X Rdx3 Rc e ∫− 2 2 3 Since the shear stress would be expected to be nearly parabolic (from basic elasticity theory), and zero at the surface, the bending stress should be taken as zero (σ X2X3 ) =0 b The surface values of shear therefore only contribute to peak stress. The development of Gordon’s procedure given here is in terms of stress components in a local coordinate system (X3, θ, X2). In practice these would be transformed into the global (r, θ, z) coordinate system, to give global linearised stress components. Once the global stress components have been linearised, the principle stresses and stress intensity can then be evaluated, as total values and as averaged membrane and surface bending stresses. 2.4.2.3 Discussion As mentioned previously, several finite element programs contain post processing options to directly calculate the equivalent linearised stresses on any prescribed classification line. Usually all stress components are linearised. A short consideration of the linearisation procedure immediately brings several possible problem areas to mind. . 28 DBA Design by Analysis Design by Analysis Page 2.28 • Selecting the stress classification line. This should be a line through the vessel wall, which would be expected to yield shell type deformations, namely straight lines remaining straight. However close to discontinuities some warping and shear would be expected (and indeed observed in the finite element calculations) and the concept of averaged membrane and linearised bending stress is tenuous. Ideally, inner, outer surfaces, and, thus, the mid-surface should be Normal to LINE 1 Normal to Inner Surface parallel, with the stress classification line Outer Surface perpendicular to these surfaces. Of course LINE 2 in some situations ambiguities can arise, as illustrated in Figure 2.24. • Selecting which stress components should be linearised. The global stress Figure 2.24: Ambiguous classification lines components, including shear, may be linearised - but what about the principal stresses? With principal stresses, there is the obvious problem that principal directions can alter from point to point through the thickness unless the classification line is far from a discontinuity. As mentioned previously, the ASME Code itself implies that the linearisation should be performed on the global component stresses: “... membrane stress intensity is derived from the stress components averaged across the thickness of the section. The averaging shall be performed at the component level ...”. There is the related question as to whether linearising the component stresses then calculating the principal stresses from the linearised components is consistent with linearising the principal stresses - plane sections remaining plane should provide this consistency. BS5500 implies that all stress components should be linearised. Selection of the classification line has received little attention in the literature. However, selection of which stress components to linearise has been examined, on behalf of the ASME Code committee, by G L Hollinger and J L Hechmer[6]. Hechmer & Hollinger analysed a representative axisymmetric vessel problem and examined several different methods of stress linearisation. Two methods appear which were identified as being both conservative and consistent: either linearise the two normal stress components on a line (in the hoop and meridional directions) and use the total normal radial and total shear stress at the surface, or linearise the meridional principal stress and use the total stresses for the other principal direction (the exact technique is not wholly clear from the paper). Neither of these would appear to be common practice. 2.4.2.4 Three Dimensional Problems Three-dimensional solid finite element analysis poses a significant problem for stress linearisation. In 3-D analysis it is necessary to find a consistent stress classification plane, which again could cause problems near the very features the designer is concerned with (fillets and gross structural discontinuities). There is the added problem of defining exactly what should be meant by plane sections remaining plane in this case. Three possibilities arise: firstly the stress components at a point are directly used to evaluate the stress differences and stress intensity; this is easy, but the 29 DBA Design by Analysis Design by Analysis Page 2.29 subsequent categorisation of these stress intensities is not. Secondly, stresses are linearised along radial lines to obtain beam type membrane and bending stresses; this suffers from the same problems mentioned above. Thirdly, selected planes are specified and two sets of stresses on distinct lines (on the plane) are used to evaluate shell type direct and bending stress on a plane. To the writers knowledge, no commercial post processors offer three dimensional stress linearisation capability over a plane, only along a line, only one by a vessel manufacturer[7]. In the case of the three dimensional problem, Hechmer & Hollinger[8] analysed a complex nozzle shell assembly using brick elements and examined the consequences of the three different assessment methods described above to calculate the stress intensity. As expected their study demonstrated a wide variation in the calculated results for the various methods (mainly because there are many possibilities open to the analyst) - a variation in stress intensity of over 35% was noted in this example. The results are indeed inconclusive: stress at a point calculation is easiest to apply but the results are not always conservative while stress along a line calculation is more advantageous with respect to Code rules. 2.4.2.5 Linearisation Guidelines It has been apparent for some time that there are deficiencies in the rules for design by analysis when the finite element method is used. In particular this has highlighted problems with the design criteria and the underlying philosophy of assessment. Over the past few years, the US Pressure Vessel Research Council (PVRC) has funded a project to consider recommendations for updating the ASME Code. It is worthwhile reviewing some of these recommendations; a summary has been given by Hechmer & Hollinger[9]. The short term recommendations consisted of six sections. The second, fourth, fifth and sixth recommendations are related to linearisation problems for primary stress and three-dimensional problems. The first and third recommendations are of a more fundamental implication since they relate to the use of finite element methods for design by analysis using the existing ASME - Code criteria. The project members have been very careful with the wording of the recommendations, and some interpretation is required. These recommendations consider essential pressure vessel components, which are basic structural elements: • • • Shells of revolution and circular plates with either constant or variable thickness (transition elements) normally connecting one structural element to another. Smooth junctions - where the model represents the actual geometry for example connecting fillet or blend radius. Sharp junctions - where the model does not represent actual geometry, such as sharp corners or notches, as shown in Figure 2.25. Basic Structural Element Smooth Junctions Sharp Junction Fillet Transition Element Sharp Junction Basic Structural Element Figure 2.25: Pressure vessel ‘elements’ Blend 30 DBA Design by Analysis Design by Analysis Page 2.30 The first and third recommendations are summarised below: First recommendation: This relates to the use of finite element analysis (FEA) in pressure vessel design by analysis. It is recommended that for the majority of pressure vessel components, which are basic structural elements, FEA is inappropriate. Pm stresses should be calculated using general equilibrium considerations, with Pm+Pb evaluated by hand calculations for conditions where Pm is small (for example in flat plates). FEA is appropriate for calculating PL+Pb stresses near discontinuities (see third recommendation below) and for the calculation of P+Q stresses in general. Notably it is only in complex components where basic structural analysis does not exist that FEA is recommended as appropriate for Pm and Pm+Pb stress evaluation. “... the thrust is that the designer should be applying his ingenuity to calculating equilibrium stresses, not to extracting stresses from a general finite element model ...”. Third recommendation: This relates to the locations in a pressure vessel where stress evaluations for Code compliance should be considered. It is recommended that it is appropriate to perform Pm+Pb (PL+Pb) and P+Q evaluations in basic structural elements, but inappropriate in discontinuity type transition regions. If there is a smooth junction then the stresses should be evaluated in the row of elements adjacent to the junction (or the line of nodes at the junction). When there is a sharp junction, the evaluation must be far enough from the junction so that the stresses are not affected by the notch behaviour. This recommendation should eliminate the need to linearise erratic stress distributions; “... the thrust ... is that plastic collapse and gross strain concentration will not occur in stiff transition regions; they will occur in the more flexible shell elements ... the purpose of the P+Q limits is to validate the fatigue analysis by precluding strain concentration and ratchet. It is highly unlikely that ratchet could occur in a transition element ...” The first recommendation is rather subtle. In the light of the ASME Code (as it stands), finite element analysis is only appropriate in certain special cases in primary stress calculation - in general, equilibrium and shell discontinuity analysis are to be preferred. However, FEA is appropriate for secondary (and peak) stress evaluation. In the context of the discussion given this may be interpreted further as follows: finite element analysis may be used to evaluate the overall stress distribution for shakedown and fatigue assessment but the analyst should use simple calculations and strength of materials arguments to extract the primary stress components. In other words, elastic finite element analysis should not be used as the basis for categorisation or evaluation of primary stress. The third recommendation also needs careful interpretation and is the most intriguing of all those provided by the PVRC project. The implication to the writers is clear - ignore the calculated stresses in sharp transition regions, since they will not affect the post yield failure mechanisms. The mid term recommendations aim to provide additional tools and procedures to assist the designer in making better use of the existing ASME Code rules, specifically to address the problems of categorisation and linearisation directly through finite element analysis. Finally the long-term recommendations aim for a more fundamental assessment of the ASME Code philosophy and criteria and require extensive new research. It is felt that new rules should be based on specific quantities required to prevent a failure mechanism, perhaps moving away from simple elastic analysis and stress evaluation. For example, the limits based on shell type membrane and 31 DBA Design by Analysis Design by Analysis Page 2.31 bending stress are difficult to understand and often misinterpreted, while the secondary limits are probably oversimplified and over-conservative, particularly in the presence of combined load. Considerable research on shakedown and ratchetting over the past twenty five years has confirmed this. 2.4.3 Problems with categorisation The process of stress categorisation (or classification) is difficult, as stress may be composed of both primary and secondary parts as seen in Figure 2.18 for the nozzle reinforcing pad. It is not sufficient just to categorise a particular stress corresponding to a given load condition, but also to categorise segments of the stress. This prospect is not inviting, and indeed rarely done in practice unless specified in Code rules (as in the case of the nozzle). We have reached a familiar problem - how should finite element (or otherwise) calculated stress be categorised? This is usually left to experience or strength of materials type arguments if this is possible. It is usually possible with simple strength of materials analyses or shell discontinuity analysis to separate primary and secondary stress with the understanding of the fundamental failure mechanisms that the Code addresses, since the equilibrium calculations were done manually. This is not obvious with finite element results, and in particular with the results of using continuum elements. The question is what can be done to ease this problem. An obvious solution would be to provide additional Code rules. While this is likely to be the case in the long term, it does not help the designer who must carry out pressure vessel design with the current rules. Briefly, the evaluation rules in this route can be summarised. Membrane and other primary membrane stresses are not allowed to approach yield since beyond yield there is the possibility of a catastrophic plastic collapse – for example bursting under internal pressure. The total (membrane plus bending) stress can increase fifty percent above the membrane limit since there is some safety margin here, but is still yield limited. Discontinuity and thermal stresses (or strain controlled stresses) must be limited to ensure shakedown under cyclic load; thus the range of secondary stress is limited to twice yield (or some smaller proportion for particular components). The peak stress must be limited to ensure a sufficient fatigue life, and certain other failure criteria may need to be addressed depending on the operating temperature - for example creep rupture at high temperature, fast fracture at low temperature. At this level categorisation is straightforward: any sustained stress that, subject to overload, would lead to plastic collapse is primary. The remaining stress (or indeed proportion of stress) can be classified as secondary and is subject only to the shakedown criterion (and fatigue limit). The problem arises because this design by analysis route relies upon elastic analysis. Elastic analysis on its own cannot characterise the nature of the stress since it is not clear what failure mechanisms can arise; it is left to the designer to do this. In addition, this approach does not make use of the ductility of pressure vessel steels, resulting in a wholly inconsistent (conservative) margin of safety[10]. In the absence of any meaningful information the designer is led to classify all stresses as primary and base redesign on this. 32 DBA Design by Analysis Design by Analysis Page 2.32 It is useful to view the categorisation problem as part of the basic requirement to avoid failure by the various failure mechanisms: the problem of categorisation should then have a different interpretation. The stress system in the component should be such that shakedown is achieved and the fatigue limits satisfied for all stresses. In fact, these are the basic design requirements. The categorisation problem can then be interpreted as the need to isolate those stress systems that could cause gross plastic collapse - that is the primary stresses. The distinction here is subtle - there is no real need to identify a calculated stress as being primary or secondary; it is only necessary to identify the primary stresses. One solution to this difficulty is to calculate the limit load of the vessel by inelastic analysis. Limit load assessment and calculation of principal stress has been discussed by several authors using a variety of methods, notably Marriott[11], Kalnins & Updike[12], Mackenzie & Boyle[13], Seshadri[14] Ponter & Carter[15] and Zeman et. al.[16]. 2.5 Implementation problems of the ASME inelastic route Inelastic finite element analysis[17,18] is more difficult than linear analysis and requires considerably greater computing resources. Essentially, the non-linear problem is solved in a piecewise manner using incremental solution techniques. The procedure usually requires the analyst to define an appropriate number of load steps, equilibrium iterations within load steps and convergence criteria defining the required accuracy of the solution. Poor choice for any of these parameters can lead to lack of convergence or indeed “convergence” to the wrong answer. In addition, it is difficult to make a priori engineering estimates of the inelastic response and to verify results of the analysis through simple calculations. There is also a shortage of non-linear benchmarks, which the analyst can use to assess the accuracy of the analysis procedures. There are two types of inelastic analysis methods, which may be used to guard against gross plastic deformation: limit analysis and plastic analysis. Limit analysis is based on an elastic-perfectly plastic material model and small deformation theory. The assumption of perfect plasticity sometimes causes convergence problems in non-linear analysis and in practice a bilinear hardening material model with a low value of plastic modulus Ep (1/10000 of E) is often used. This analysis determines the limit load PL of the vessel. The allowable load Pa then is defined as a specified fraction of the limit load. Plastic analysis is based on the ‘actual’ non-linear stress-strain relationship of the vessel material, including non-linear geometry effects if desired. This analysis determines the plastic collapse load Pφ. However, determination of the ‘plastic collapse load’ is not straightforward – to understand this, some basic concepts are required. 33 DBA Design by Analysis Design by Analysis Page 2.33 2.5.1 Plastic design loads The aim with the ASME inelastic route is to estimate limit and shakedown loads directly, which can then be used to characterise an allowable load (Sec. 2.2). To begin with these are defined: The First Yield Load Py The first yield load Py is defined as the load for which the material of the pressure vessel first yields (from the virgin stress-free state) at the most highly stressed point. Because only one point of the material is at yield, the surrounding elastic material restrains the vessel from plastic deformation as a whole. The Limit Load P0 The classical definition of a limit load P0 according to limit analysis is an idealized one, a mathematical one. This “theoretical limit load” is the maximum load solution to an analytical model of the structure which embodies the following conditions: the strain-displacement relations are those of small displacement theory (first order); the material response is rigid plastic or elastic-perfectly-plastic (Fig.2.26), the internal stresses and applied forces are related by the usual linearised equations of equilibrium which ignore changes in geometry due to deformations. stress (force) rigid-perfectly plastic strain (extension) elastic-perfectly plastic stress (force) • • • strain (extension) Fig 2.26 : Elastic-perfectly-plastic and rigid-plastic deformation curves 34 DBA Design by Analysis Design by Analysis Page 2.34 A (sufficiently) small region in an elastic-perfectly plastic material behaves either elastically (if stressed below yield), or plastically (for stresses at yield). At loads above the first yield load, P > Py, but less than the limit load, P < P0, a region of material may have stresses at yield, but this region is still restrained by the remaining rigid portions of material in the vessel. When the load is increased to the limit value P0, the plastic region has grown to an extent such that the rigid region has either disappeared or has become insufficient to restrain the plastic region from motion. The load for which overall plastic deformation of the vessel occurs is called the limit load. According to limit analysis theory, it is impossible to have loads greater than the limit load for a perfectly plastic material. The Plastic Collapse Load Pc The plastic collapse load Pc is applied to the actual structure or vessel consisting of an actual strain hardening material. It includes the effects of geometry change due to large deformations. At this load, significant plastic deformation occurs for the structure or vessel as a whole (un-contained plastic flow). The cause is the plastic region in the vessel, who now has grown to a sufficient extent such that the surrounding elastic regions no longer prevent overall plastic deformation from occurring. When this occurs, it may constitute a real failure, in the sense that the structure then can no longer fulfil its intended function. The plastic collapse load can be used as a realistic basis for design; an efficiently designed structure will be proportioned so that the external (operational) actions would have to be increased by a specified factor (safety factor) in order to produce failure. The limit load for an idealised structure then can be an approximation for the plastic collapse load for the actual vessel, when it is largely plastic at small deflections. The Ultimate Load Pu At the plastic collapse load, the vessel does not necessarily collapse. Therefore, the adjective, “collapse”, is unfortunate. The terminology of plastic deformation load or just plastic load would be more meaningful. The load at which the vessel actually collapses is the ultimate load Pu. An example of an ultimate load is the burst pressure for a cylindrical vessel of sufficient ductility. The Plastic Instability Load Ppi Plastic instability loads can be of two types: • • of the material instability type, and of the structural instability type. Plastic material instability corresponds for example to necking of a tensile specimen at the ultimate load. The plastic structural instability load, depends upon the yield strength of the material, and is accompanied by significant changes in shape of the structure or vessel. The plastic instability load is important because its value is often less than the limit load. The Shakedown Load PS All the above load definitions are for monotonic increasing loads. The shakedown load refers to cyclic loading and is considered briefly because it is important to know the relative margin of safety on shakedown of a design. 35 DBA Design by Analysis Design by Analysis Page 2.35 If upon loading the structure beyond yield into the plastic range to a load value P > Py, and upon unloading, a residual stress distribution is produced in the structure such that further cycles of load to value P produce only elastic changes in stress, the structure is said to shake down. The highest value of P for which shake down occurs is called the shakedown load Ps. Failure to shake down, i.e. P > Ps, leads to either progressive plastic flow called ratchetting, or to low cycle fatigue failure. 2.5.2 Limit Analysis Theory as Applied to Pressure Vessels Consider a typical pressure vessel loaded by internal pressure, a perfectly-plastic material, small deflections and increasing the pressure p. At small values of p, the vessel material will be elastic and deformation of the vessel will increase in proportion to p. However, as the pressure is continually increased, a region of the vessel becomes plastic and the rate of deformation begins to increase, but deformation of the vessel as a whole is usually still restrained by the surrounding elastic material. Finally, upon further increase in pressure, a limit pressure or (in this case) a plastic collapse pressure is reached, where the plastic zone has grown sufficiently large so that the deformation has suddenly begun to increase with little or no additional increase in pressure. The problem then is this: What will be the magnitude of the limit pressure of a particular pressure vessel? This is an important question in designing a vessel with a sufficient margin of safety. As described above, the problem from the beginning of loading involves initially elastic, then elastic-plastic, and finally largely plastic behaviour. This is an involved and complicated loading process. The theory of limit analysis, an idealised theory, enables the limit pressure to be found by considering: • • a rigid ideal-plastic, or a linear elastic ideal-plastic material, characterised by a sharply defined yield limit (no strain hardening material), the small displacement theory (any effect of geometry change of the shell due to deformation is neglected). These limitations must be kept in mind when applying limit analysis theory to certain problems where the effects of strain hardening and geometry change may be important. 2.5.3 Elastic-Plastic Theory as Applied to Pressure Vessels If effects of strain hardening and geometry change are important, an elastic-plastic analysis is to be applied. Their influence on the load-deflection curvature is discussed. Geometry Effects Fig 2.27 shows a comparison between: a) b) c) d) a small-deflection rigid-plastic limit load analysis, a small-deflection elastic-plastic analysis, a large-deflection elastic-plastic analysis, with geometrical weakening, a large-deflection elastic-plastic analysis, with geometrical strengthening, 36 DBA Design by Analysis Page Design by Analysis 2.36 e) a large-deflection elastic analysis, with geometrical weakening, f) a large-deflection elastic analysis, with geometrical strengthening. 2 f 1.8 d e 1.6 a b 1.4 a b load (bar) 1.2 c c 1 d e 0.8 f 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 deflection (mm) Fig 2.27 : Influence of geometrical effects The small deflection elastic-plastic solution b) approaches the small-deflection rigid-plastic limit load solution a) as expected. The large-deflection elastic-plastic solution, with geometrical strengthening, gives a value higher than the limit load. The large-deflection elastic-plastic solution, with geometrical weakening, gives a value lower than the limit load. Effect of Strain Hardening The effect of strain hardening is to increase the pressure capability above the limit load predicted by the perfectly-plastic analysis, including the large deflection effect. Fig 2.28 shows that a higher slope of the plastic part of the load-deflection curvature corresponds to a higher strain hardening effect. 37 DBA Design by Analysis Page Design by Analysis 2.37 1.8 6% 4% 2% 0% 1.6 1.4 1.2 load (bar) 0% 1 2% 4% 0.8 6% 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 deflection (mm) Fig 2.28: Influence of strain hardening effect 2.5.4 Estimation of plastic loads Using an elastic-plastic analysis including strain hardening and large deflections or equivalently considering experimental analysis of an actual vessel, one is confronted with the problem of defining a realistic measure of plastic loads. A number of estimations have been used. These are reviewed next. The discussion refers to pressure loading, but the same definitions can be applied to other types of loadings. The Limit Pressure p0 Characteristic for the limit pressure definition according to the rigid perfectly-plastic theory is (with p = pressure and δ = deflection) dp/dδ = ∞ or dδ/dp = 0 for p < p0, and dp/dδ = 0 or dδ/dp = ∞ for p = p0. Characteristic for the limit pressure definition according to the elastic perfectly-plastic theory is dp/dδ > 0 for p < p0, 38 DBA Design by Analysis Page Design by Analysis 2.38 and dp/dδ = 0 or dδ/dp = ∞ for p = p0. These definitions only apply for small-deflection analyses. The Tangent-Intersection Pressure pti (Fig 2.29) 1.6 1.4 Pti = 1.35 bar 1.2 load (bar) 1 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 deflection (mm) Fig 2.29 : Tangent-Intersection method The tangent-intersection pressure is the pressure at the intersection of the two tangents, drawn to the elastic and plastic parts of the pressure-deflection curves. The value of the pressure obtained by this method is sensitive to the localisation of the tangent-point in the plastic range The 1% Plastic Strain Pressure p1 The plastic pressure is defined as the pressure with an equivalent plastic strain of 1%. Methods based upon an absolute maximum strain not only will depend on the material assumed, but more significantly on the geometry: • • Material: e.g. a 1% plastic strain is ten times the yield point strain if the yield point stress is 150 MPa, but five times the yield point strain if the yield point stress is 300 MPa. Consequently, the relative size of the elastic and plastic zones will differ and the shape of the pressure-deflection response curves will differ. Geometry: Ellipsoidal heads have been found to deform less than torispherical or toriconical heads. Whereas a torispherical vessel may reach a 1% strain at a certain pressure, the ellipsoidal vessel may reach the same pressure at a lower strain. 39 DBA Design by Analysis Page Design by Analysis 2.39 At a yield hinge location, strains will be larger than at other locations. Consequently, the selection of a strain gauge location on an experimental vessel presents a variable when yield hinge locations are not known precisely or a priori. Thus, in summary, a strain basis for defining a plastic pressure may be subject to error in locating the exact location of maximum strain. Also, strain is a local phenomenon that is not indicative of plastic work. The Twice-Elastic-Deformation Pressure p2y A plastic pressure is defined to be the pressure at which the deflection or strain reaches twice the value of the elastic deflection or elastic strain at the first yield pressure py. Thus, p2y depends upon py. Exact determination of py using a computer analysis should not be a problem. In experiments however, determining the elastic limit on the load deflection curve may be subject to error. The Twice-Elastic-Slope Pressure pϕ A plastic pressure is defined to be the value at the intercept of a line drawn from the origin of a pressure-deformation curve at a slope of twice the slope of the elastic portion of the curve (see Fig 2.30). 1.6 Pφ = 1.39 bar 1.4 1.2 load (bar) 1 y = 2.2x 0.8 y = 1.1x 0.6 0.4 0.2 0 0 0.5 1 1.5 deflection (mm) Fig 2.30 : Twice-Elastic-Slope method 2 2.5 40 DBA Design by Analysis Design by Analysis Page 2.40 The 0.2% Offset Strain Pressure p.2 The 0.2% offset strain pressure is a test pressure that causes a permanent strain of 0.2%. The Proportional Limit Definition ppl Ppl is a test pressure defined as the pressure causing the displacement versus pressure curve to deviate from linearity. The displacement of the vessel is to be measured at the weakest point, the most highly stressed point, giving the lowest value of ppl. Analytical calculations can determine this pressure correctly. It will not necessarily be equal to the first yield pressure py. Experimental measures are subject to error in determining the point of deviation from linearity. Values of ppl up to 30% greater than py can be estimated from an experimental curve. This method of determining a plastic pressure will generally give a lower bound to the plastic pressure found by most other methods. The Plastic-Instability Pressure ppi This is an actual plastic collapse pressure and not just an estimate of a plastic pressure. It may be identical to the limit pressure if large deflection effects are small, e.g. when the vessel is relatively thick. However, the plastic-instability pressure may be less than the small-deflection limit pressure as in the case of a large-deflection elastic-plastic solution, with geometrical weakening (see Fig 2.27, curve c). The plastic instability is defined by a zero slope on the pressure-deflection curve. A large-deflection elastic-plastic analysis is required to detect ppi. It will also be detected in experiments on actual vessels and it is possible to have plastic instability pressures less than lowerbounds to the limit pressure where the latter are based on small-deflection analyses. It may occur that some of the above estimations of the limit pressures will be non-conservative estimates of the real plastic collapse pressure, an instability pressure, if the estimates were applied to smalldeflection theoretical results. 2.5.5 Inelastic Progressive Plastic Deformation - Shakedown Within the DBA approach the determination of the limit load, for a given constitutive law, is one step. Proving that Progressive Plastic Deformation (PD) will not occur, or – more stringent – that neither PD nor Accumulating Plasticity (AP) will occur, in other words, proving that the structure under consideration will shake down to pure elastic behaviour under cyclic varying actions, is another step. Considering this proof, which is to be obtained through numerical simulation, the following information may be useful: - In this proof the constitutive law may be, but needs not to be the same law as used in the determination of the limit load. Normally the structure shakes down under cyclic actions which are to be specified as functions of a single parameter. This parameter determines the sequence of the actions and quite often this parameter is time. The proof of shakedown is easier to perform than the proof against PD. Being conservative this approach yields the proof that neither PD nor AP occurs. 41 DBA Design by Analysis Design by Analysis Page 2.41 - In the inelastic simulation the proof of shakedown can be performed by applying the action cycle repeatedly. - The proof may also be performed using Melan's shakedown principle: • Using an equivalent linear elastic structure, a given cyclic action results in a corresponding cyclic stress field. Additionally a time-independent self-equilibrating stress field should be found, such that, using superposition of both stress fields, the stress intensity does not exceed the yield limit at any time in the cycle. • This approach is especially attractive in those particular cases where an appropriate selfequilibrating stress field is already known. A thermal stress field may serve as an example, as well as the difference between a purely elastically determined stress field and the corresponding field using plastic constitutive laws. • In many cases the proof may be performed using the check of primary + secondary stresses used in a linear elastic DBA route, against the so-called 3f-criterion. The fulfilment of this criterion is a necessary condition for shakedown. It is considered accurate enough for most cases especially in combination with some other checks. However care should be taken whenever the cyclic action contains a non-negligible time-invariant part e.g. a large contribution of selfweight. 2.5.6 Discussion Again it can be seen that apparently simple requirements of the inelastic route can be problematic. Limit or shakedown analysis could be used to directly estimate the limit and shakedown loads, but until recently this was difficult if not impossible for complex structures. If elasto-plastic finite element analysis is used there remains the problem of defining the plastic load – there are various estimations as described above. The twice-elastic-slope method recommended by ASME has been shown to give inconsistent results. The European standard aims to remove some of these problem areas. In the following an overview of the new rules is given: 2.6 Design by Analysis in the European Standard 2.6.1 General The European Standard has introduced the possibility of satisfying the requirement to avoid various failure mechanisms directly through the detailed rules embodied in the new Direct Route, while retaining the ‘conventional’ elastic route which uses stress categorisation. In addition it also introduces several new concepts to help overcome the known difficulties with the current design by analysis approach and to assist the formulation of the Direct Route. In particular the notion of an ‘action’ rather than a force, and the inclusion of ‘partial safety factors’ is a novel and welcome addition to the area of pressure vessel design by analysis. In the following some background to these new concepts is provided, followed by a summary of the required design checks, with some explanation if required. 42 DBA Design by Analysis Design by Analysis Page 2.42 2.6.2 New concepts 2.6.2.1 Principles and application rules Like in the Eurocode (for steel structures) distinction is made between principles and application rules. Principles comprise general statements, definitions and requirements for which there is no alternative, and requirements and analytical models for which no alternative is permitted (unless specifically stated). Application Rules are generally recognised rules which follow the principles and satisfy their requirements; alternatives are allowed provided it is shown that they accord with the relevant principle. Typical examples are the primary and the primary & secondary stress criteria of the stress categorisation approach, which are stated here, in slightly modified forms, as application rules. 2.6.2.2 Actions This term, which replaces the old term loadings, denotes all thermo-mechanical quantities imposed on the structure causing stress or strain, like forces (including pressure), temperature changes and imposed displacements. Actions are classified by their variation in time: • • • • permanent actions (G) variable actions (Q) exceptional actions (E) operating pressures and temperatures ( p, T ) - although these are variable actions, they are considered separately to reflect their special characteristics (variation in time, random properties, etc.). The notion variable actions encompasses actions of quite different characteristics – from those actions which are deterministically related to pressure and/or temperature, via actions not correlated with pressure or temperature but with well defined (bounded) extreme values, to actions which can be described only as stochastic processes not correlated with pressure or temperature, like wind loads. Actions with a deterministic relationship with pressure and/or temperature shall be combined in the pressure/temperature action and the relationship, exact or approximate, shall be used. The characteristic values of actions describe the regime of actions which envelops all the actions that can occur under reasonably foreseeable conditions. The characteristic values are used in determining the design values of the actions, and they depend on the actions' (statistical) properties. The characteristic values of permanent actions are usually their mean values (or credible extreme values). The characteristic values of variable actions are defined as mean values, or p% percentiles, of extreme values, and values specified in relevant codes for wind, snow, earthquake may be used; usually they are adapted to Eurocode concepts anyway. The upper characteristic value of pressure shall not be smaller than the lesser of the set pressure of the protecting device or the highest credible pressure that can occur under normal and upset conditions (reasonably foreseeable), and the upper characteristic value of the temperature not smaller than the highest credible temperature (under the same conditions). Therefore, the (limited) pressure excursion 43 DBA Design by Analysis Design by Analysis Page 2.43 (overpressure) that occurs if a safety valve opens need not be included in the (maximum) characteristic value of pressure; it is taken care of in the partial safety factors. 2.6.2.3 Partial safety factors To allow for an easy, straightforward combination of pressure action with environmental ones, and, at the same time, to give the flexibility, expected from a modern code, to adjust safety margins to differences in action variation, likelihood of action combinations, consequences of failure, differences of structural behaviour and consequences in different failure modes, uncertainties in analyses, a multiple safety factor format was introduced, using different partial safety factors for different actions, different combinations of actions, different failure modes and corresponding resistances of the structure. Examples of partial safety factors are given in the following Table. The corresponding combination rules for e.g. Design Check GPD-OC Global Plastic Deformation – Operating Conditions are: • • • • all permanent actions shall be included in each load case each pressure action shall be combined with the most unfavourable variable action each pressure action shall be combined with the corresponding sum of variable actions; stochastic actions may be multiplied by the combination factor. favourable actions shall not be considered. The partial safety factors of pressure and resistances are calibrated with respect to the DBF results; no attempt has been made to justify the partial safety factors by probabilistic investigations or decision theory under uncertainty; if pressure is the only action the approach can be transformed to a nominal design stress one. Actions Permanent γ G Unfavourable Favourable Pressure γ P Variable γ Q Partial safety factors Design check GPD-OC GPD-HT Combination factor ψ (stochastic actions) Resistance γ R (Temperature γ T ) 1 1.35 1.0 1.2 (1.0) 1.5 (1.0) 1.35 1.0 1.0 - 0.91 1.01 1.25 (1.0) 1.05 (1.0) If not specified differently in the relevant code of environmental actions. 2.6.2.4 Design checks – effects of actions Design checks are investigations of the structure's safety under the influence of specified combinations of actions - the design load cases - with respect to specified limit states (representing 44 DBA Design by Analysis Design by Analysis Page 2.44 one or more failure modes). Characteristic values of the actions are multiplied by the corresponding partial safety factors to obtain their design values and their combined design effect (on the structure) is evaluated: E d ( γ G G , γ p p , γ Q Q ,... , a d ,... ) In the design checks these design effects are compared with the corresponding design resistances, obtained by dividing the resistance of the structure, corresponding to the action's combination, by the relevant partial safety factor of the resistance: E d ≤ R d = R ( G , p , Q ,... , a d , ) / γ R This comparison can, in general, be performed in actions, in stress resultants (generalized stresses) or in stresses. The resistances are related to the limit states - states beyond which the part no longer satisfies the design performance requirements. 2.6.2.5 Design checks – resistances Design checks are designated by the failure modes they deal with. The following ones are incorporated in the first issue of the standard: • • • • • gross plastic deformation (GPD), with corresponding failure modes ductile rupture and, for "normal" designs, also excessive local strains progressive plastic deformation (PD) instability (I) fatigue (F) static equilibrium (SE). Checks against gross plastic deformation The design resistances are given by the lower-bound limit loads for • proportional increase of all actions • a linear-elastic ideal-plastic material (or a rigid ideal-plastic one) • first-order theory • Tresca's yield criterion and associated flow rule • specified design strength parameters. Design strength parameters R M and partial safety factors of the resistances γ R are chosen such that for the simplest structures and pressure action only DBA and DBF results agree. The only exception are steels, other than austenitic ones with A 5 ≥ 3 0 % , where the design strength parameter R M is given by R eH , T or R p 0 . 2 , T and γ R = 1.25 for R eH / R m ≤ 0.8 and γ R = 1.5625 R eH / R m otherwise. 45 DBA Design by Analysis Design by Analysis Page 2.45 If the procedure used to determine the limit action does not give an (absolute) maximum in the region with maximum absolute values of principal strains less than 5%, the boundary maximum, for which the maximum absolute value of the principal strains equals 5%, shall be used. As an application rule the "usual" primary stress criterion is given, formulated in stresses and - for structures where the concept of stress resultants is applicable - in stress resultants and local (technical) limit loads. These checks (against GPD) are considered also to encompass Excessive Yielding, provided "usual" design details (with not too severe strain concentrations) exist. Checks against progressive plastic deformation On repeated application of specified action cycles PD shall not occur for • a linear-elastic ideal-plastic material • first-order theory • Mises' yield condition and associated flow rule • specified design strength parameters RM. A slight modification of the "usual" 3 f criterion is given as application rule; it is noted that this application rule, which is derived from shakedown considerations, is only a necessary condition for the fulfilment of the principle, but is considered, together with all the other checks, to be sufficient to achieve the principle's goal - avoidance of ratchetting in the structure. Check against fatigue failure Reference is made to the Fatigue Assessment section of the Standard. Instability Static equilibrium The usual checks against overturning and (rigid body) displacement are stated explicitly, using the partial safety factors given in the other checks. 2.6.3 Application remarks Whether the Direct Route or the Stress Categorisation Route is followed, it is imperative that all stated checks are considered: • • in the Direct Route: At least the five given checks – sometimes it may be necessary to include additional ones, like excessive deformation (leakage). Not all of the checks will require calculations, but all must be considered – e. g. it may be obvious that instability can be excluded. in the Stress Categorisation Route: 46 DBA Design by Analysis Design by Analysis Page 2.46 Check of Primary Stresses Check of Primary + Secondary Stresses Check of Total Stresses (Primary + secondary + peak stresses) - Fatigue Usually it is required to perform each of these checks for different load cases – for different combinations of coincident actions, as well as for different characteristic values of actions, e. g. different pressure – temperature pairs. The Design by Analysis route may be chosen to prove conformity of a design also for a part of a component, suitably selected and limited; and with appropriate boundary conditions. 47 DBA Design by Analysis Design by Analysis Page 2.47 2.7 REFERENCES [1] W. C. Kroenke, J. L. Hechmer, G. L. Hollinger & A. J. Pedani, “Component evaluation using the finite element method. In “Pressure Vessel & Piping Design: A Decade of progress, 19701980”, Chap. 2.11, ASME, 1981. [2] W. C. Kroenke, “Classification of finite element stresses according to ASME Section III stress categories,” Proc 94th ASME Winter Annual Meeting, 1973. [3] W. C. Kroenke et al, “Interpretation of finite element stresses according to ASME III,” ASME Tech. Paper 75-PVP-63, 1975. [4] N.V.L.S. Sarma, G. L. Narasaiah & G. Subhash, “A computational approach for the classification of FEM axisymmetric stresses as per ASME Code,” Proc ASME Pressure Vessel & Piping Conf, Pittsburgh, 1988. [5] J. L. Gordon, “OUTCUR: An automated evaluation of two dimensional finite element stresses according to ASME,” ASME Paper 76-WA/PVP-16, 1976. [6] J. L. Hechmer & G. L. Hollinger, “Considerations in the calculations of the primary plus secondary stress intensity range for Code stress classification,” “Codes & Standards and Applications for Design and Analysis of Pressure Vessel and Piping Components” Ed R. Seshadri, ASME PVP Vol.136, 1988. [7] B. W. Leib, “An automatic surface element generator for calculating membrane and bending stresses from three dimensional finite element results,” Proc 4th Int Conf on “Structural Mechanics in Reactor Technology”, San Francisco, 1977. K. H. Hsu & D A McKinley “SOAP - a computer program for classification of three dimensional finite element stresses on a plane,” Proc ASME Pressure Vessel & Piping Conference, Nashville, 1990. [8] J. L. Hechmer & G. L. Hollinger, “Three dimensional stress criteria - a weak link in vessel design and analysis,” ASME Special Publ. PVP 109 “A Symposium on ASME Codes and Recent Advances in Pressure Vessel and Valve Technology” Ed J. T. Fong, 1986. J. L. Hechmer & G. L. Hollinger, “Three dimensional stress criteria -application of Code rules,” ASME Special Publ. PVP 120 “Design and Analysis of Piping, Pressure Vessels and Components” Ed W. E. Short, 1987. J. L. Hechmer & G. L. Hollinger, “Code evaluation 3D stresses on a plane, “ Codes & Standards and Applications for Design & Analysis of Pressure Vessels & Piping, ASME PVP-Vol.161, 1989. [9] J.L. Hechmer & G.L. Hollinger, “Three dimensional stress criteria,” ASME PVP-Vol.210-2 Codes and Standards and Applications for Design and Analysis of Pressure Vessel & Piping Components, Ed R. Seshadri & J.T. Boyle, 1991. G. Hollinger, “Summary of three dimensional stress classification,” Proc Int Conf on Pressure Vessel Technology, Dusseldorf, 1992. 48 DBA Design by Analysis Design by Analysis Page 2.48 [10] R.L. Roche, “Practical procedures for stress classification,” Int Journ Press Vess & Piping, Vol.37, 27-44, 1989. [11] D.L. Marriott, “Evaluation of deformation or load control of stresses under inelastic conditions using elastic finite element analysis,” Proc ASME Pressure Vessel & Piping Conf, Vol.136, Pittsburgh, 1988. [12] A. Kalnins & D.P. Updike, “Role of plastic limit and elastic plastic analyses in design,” ASME PVP-Vol.210-2 Codes and Standards and Applications for Design and Analysis of Pressure Vessel & Piping Components, Ed R. Seshadri & J.T. Boyle, 1991. A. Kalnins & D.P. Updike, “Primary stress limits on the basis of plasticity,” ASME PVPVol.230, Stress Classification, Robust Methods and Elevated Temperature Design, Ed R. Seshadri & D.L. Marriott, 1992. [13] D. Mackenzie & J. T. Boyle, “A computational procedure for calculating primary stress for the ASME B&PV code,” Trans ASME, Jrn Pressure Vessel Tech, Vol. 116, No. 4, 1994. D. Mackenzie, J. Shi, R. Hamilton & J. T. Boyle, "Simplified lower bound limit analysis of pressurised cylinder-cylinder intersection Shells using a generalised yield criteria", Int Jrn of Pressure Vessels & Piping, 67, pp. 219-226, 1996. J. T. Boyle, R. Hamilton, J. Shi, & D. Mackenzie, "A simple method of calculating Limit Loads for thin axisymmetric shells", Trans. American Society of Mechanical Engineers (ASME), Jrn Pressure Vessel Technology, Vol. 119, No.2, pp. 236-242, 1997. [14] R. Seshadri & C.P.D. Fernando “Limit loads of mechanical components and structures using the GLOSS r-node method”, Proceedings of ASME PVP, Vol. 210-2, pp. 125-134, 1991. [15] A.R.S. Ponter, K.F. Carter, “Limit state solutions, based upon linear elastic solutions with a spatially varying elastic modulus”, Jrn of Computer Methods in Applied Mechanics and Engineering, Vol.140, No.3-4, pp.237-258, 1997. A.R.S. Ponter, K.F. Carter, “Shakedown state simulation techniques based on linear elastic solutions”, Jrn of Computer Methods in Applied Mechanics and Engineering, Vol.140, No.3-4, pp.259-279, 1997. [16] T. Seibert, J. L. Zeman, „Analytischer Zulässigkeitsnachweis von Druckgeräten“, Techn. Überwachung, Bd. 35 (1994) Nr. 5, 222-228. W. Poth, J. L. Zeman, „Grenztragfähigkeit der Innendruckeinwirkung“, Konstruktion 48 (1996), 219-223. Zylinder-Kegel-Verbindung unter J. L. Zeman, „Ratcheting limit of flat end cylindrical shell conections under internal pressure“, Int J Pres Ves & Piping 68 (1996), 293-298. R. Preiss, F. Rauscher, D. Vazda, J. L. Zeman, „The flat end to cylindrical shell connection – limit load and creep design“, Int J Pres Ves & Piping, 75 (1998),715-726 [17] D. Mackenzie, J. T. Boyle & R. Hamilton, “Application of Inelastic Finite Element Analysis to Pressure Vessel Design”, International Conference on Pressure Vessel Technology, Volume 2, ASME 1996. 49 DBA Design by Analysis Design by Analysis Page 2.49 [18] J. C. Gerdeen, “A critical Evaluation of Plastic Behaviour Data and a United Definition of Plastic Loads for Pressure Components”, WRC Bulletin 254, November 1979, ISSN 0043-2326. [19] A. Kalnins, D. Updike & J.L. Hechmer, “On Primary Stress in Reducers”, ASME PVP-Vol. 210-2, pp. 117-124 [20] D. Mackenzie, J.T. Boyle, J. Spence, "Some Recent Developments in pressure vessel Design by Analysis" Proc IMechE, Part E, Journal of Process Mech Eng, 1994, 208, 23-30.