MECHANICS OF MAIERIALS & STRUCLURES
Structures:
Structures are systems of interconnected components designed to withstand external loads and
forces. These structures can be classified into various types based on their shape, composition, and behavior
under loading. Here are a few examples of structures and their characteristics:
Beams: A beam is a structural member resting on supports to carry vertical loads. They are designed
to resist bending and shear stresses. Examples of beams include bridge girders, roof beams, and
floor joists.
Columns: Columns are vertical structural members that primarily resist compressive loads. They are
designed to withstand buckling under high compressive forces. Examples of columns include pillars,
posts, and support columns for buildings.
Trusses: Trusses are composed of interconnected triangles and are used to support roof and bridge
structures. They are designed to resist tensile and compressive loads and are commonly used in
lightweight structures like airplane wings and space frames.
Cables: Cables are flexible structures that can support tensile loads. They are made up of wires
twisted or braided together and can be used for structures like suspension bridges, power lines, and
cable-stayed structures.
Shells: Shells are thin, curved structures that can resist external loads by developing compressive
and tensile stresses. Examples of shells include pressure vessels, storage tanks, and the domes of
buildings.
Buildings and bridges etc.
Stress:
- The internal force of resistance per unit area offered by a body against deformation is called
stress.
- It is originates only in deformable body.
- Axial stress = Ошибка! = Ошибка!
- Shear stress = Ошибка! = Ошибка!
- Bending Stress=
-
𝐁𝐞𝐧𝐝𝐢𝐧𝐠 𝐦𝐨𝐦𝐞𝐧𝐭
𝐬𝐞𝐜𝐭𝐢𝐨𝐧 𝐦𝐨𝐝𝐮𝐥𝐮𝐬
=
𝑴
𝐳
Its unit is same as unit of pressure.
Unit = N/mm2 or Kg/cm2 or MPa
1.
In mechanics, stress is typically classified into various types based on the direction and nature of the forces
acting on the material. Here are the main types of stress:
Stress
Direct Stress
Indirect Stress
or simple stress
Combined Stress
Bending Stress
Normal Stress
Or Axial Stress
Torsional Stress
Shear Stress
Tensile Stress
Bearing Stress
Compressiue Stress
NOTES:
Normal Stress:
- Stress acting perpendicular to the area of cross section.
- Stress are either compressive or tensile.
Shear Stress:
- Stress acting along or parallel to cross sectional area of member is known as shear stress.
Bearing Stress:
- Developed at the state of load transfer portion of structures.
- Example- Column of foundation load transfer.
Tensile Stress:
- That tends to elongate the body.
Compressive Stress:
- That tends to shorten the body.
Bending Stress:
- Stress due to bending moment.
Tensional Stress:
- Stress due to eccentricity load.
Strains:
-
2.
In engineering, strain refers to the amount of deformation that occurs in a material when it is
subjected to an external force or stress
It can be defined as the change in geometry per unit original geometry. Geometry in terms of
length, area and volume.
It is dimensionless number i.e. it has no unit, it is just ratio.
It is represented by symbol ( Ԑ)
Types of Strain:
1.
Longitudinal/ Linear/ Axial/ Normal Strain:
Normal Strain is the longitudinal directional strain due to the longitudinal directional
load.
It has two types named one is tensile strain and another is compressive strain.
Form figure, Longitudinal strain (Ԑ long) = Ошибка! ––––––––– (i)
d
P
l
2.
3.
4.
l
Lateral /Transverse Strain:
It is lateral direction strain due to longitudinal directional load.
From fig: Lateral strain: (Ԑlateral) = Ошибка! –––––– (ii)
Shear strain:
It is the lateral directional strain due to the lateral directional load.
It is the strain that changes the angle of an objects.
Volumetric strain:
It is defined as the ratio of change in volume to original volume.
(Ԑvol.) = Ошибка! = Ошибка!
Other important points.
Rigid Body:
- Do not change size and shape with respect to load.
Deformable Body:
- Change shape and size under load.
Poisson's ratio:
- The ratio of unstrained lateral strain to linear strain is called Poisson's ration.
- Its value lies in between -1 to + 0.50. For Engineering material its value lies 0 to 0.50. Its
value may be negative too.
- It is represented by (mue) or 1/m.
-
𝑳𝒂𝒕𝒆𝒓𝒂𝒍 𝒔𝒕𝒓𝒂𝒊𝒏
Mathematically, () = − 𝑳𝒐𝒏𝒈𝒊𝒕𝒖𝒅𝒊𝒏𝒂𝒍 𝒔𝒕𝒓𝒂𝒊𝒏 = −
∆𝑫⁄
𝑫
∆𝑳⁄
𝑳
Values of poison's ratio for different materials
S.N Materials
Value of poisons ratio
1.
0.25 to 0.33.
Steel
3.
2.
0.08 to 0.18.
3.
Concrete
Clay
4.
Cast iron
0.21 to 0.26.
5.
Rubber
0.50
6.
Wood
0.25
0.3 to 0.45.
Note:
It's value between: 1 to 0.5.
Poisson's value for mild steel = 0.25.
Poisson's value for stainless steel = 0.33.
Poisson's ration for M20 grade of concrete = 0.15.
Significance of Poisson's ratio:
The significance of Poisson's ratio lies in its ability to predict the behavior of materials under different types
of loading conditions.
Some of the key significance of Poisson's ratio are:
Material selection: Poisson's ratio is an important factor in material selection for engineering
applications. It can help to determine which materials are suitable for specific applications, based on
their ability to withstand different types of loads and stresses.
Design of structures: Poisson's ratio can be used to predict the behavior of structures under different
loading conditions. This can help in designing structures that are safe and stable, by ensuring that the
materials used are able to withstand the forces that will be applied to them.
Mechanical properties: Poisson's ratio is related to other important mechanical properties of materials,
such as elastic modulus and shear modulus. These properties are critical in understanding the
deformation behavior of materials under different loading conditions.
Manufacturing processes: Poisson's ratio can also play a role in manufacturing processes, such as in the
design of molds for casting or in the selection of materials for additive manufacturing. By understanding
the behavior of materials under different types of loading conditions, manufacturers can optimize their
processes and improve the quality of their products.
Thermal Stress:
-
4.
Stress produced due to change in temperature.
-
-
If one end is free, change in temperature does not produces any stress.
If both ends are fixed, increase on temperature produces compressive stress whereas decrease in
temperature produces tensile stress.
Change in length (𝑑𝑙) = 𝑙. ⍺. 𝑑𝑡
(Where, l is length of bar, ⍺ is coefficient of linear expansion, 'dt' change in temperature)
𝑑𝑙
𝑙
=
𝑙.𝛼.𝑑𝑡
𝑙
-
Thermal strain (et) =
-
Thermal Stress (𝜎𝑡 ) = 𝛼. 𝑑𝑡. 𝐸
= 𝛼. 𝑑𝑡
Hooke’s law:
-
-
It states that “stress is directly proportional to the strain within certain limit (elastic limit).
Mathematically,
𝜎∝Ԑ
or
𝜎 = 𝐸Ԑ
Where, E is known as Young’s modulus of elasticity
E = 2.1 ×105 N/mm2 for mild steel
E = 2 ×105 N/mm2 for only steel
E = 5700 Fck N/mm2 for concrete (As per IS -1978)
E = 5000 Fck N/mm2 (As per IS 456–2000)
Where, Fck is characteristic strength of concrete.
Stress-Strain Diagram for Ductile materials.
- Ductile materials undergo a large amount of deformation before failing. The following figure
shows the stress-strain curve for a ductile specimen:
- The significance for the points on the graph are given below:
a. Proportional Limit:
- This limit is represented by point A on the graph.
5.
b.
c.
-
d.
e.
-
Up to this limit, the stress and the strain induced in the specimen are directly proportional to
each other, i.e. the specimen obeys Hooke’s law.
Beyond this point, the stress is not proportional to the strain.
Elastic Limit:
This limit is represented by point B on the graph.
Up to this limit, the material is said to be elastic.
This implies that the specimen regains its original shape and dimensions after the removal of
the external load.
There are no residual deformations seen in the specimen, on removal of the load. After this
point, the material is said to become plastic.
Yield Point:
Contrary to what the name suggests, this is a region rather than a point. It is limited by the
upper yield point ‘C’ and the lower yield point ‘D’.
The stress – strain curve in this part of the graph is almost horizontal, which implies that there
is an appreciable increase in strain for a negligible increase in stress. Yielding starts at ‘C’
and ends at ‘D’. After the point ‘D’, the material, due to strain hardening again starts taking
load and the curve rises, as seen in the figure.
The material now is said to be plastic and the deformation is of nearly permanent nature.
Ultimate Stress:
This is shown by the point ‘E’ on the graph.
It represents the maximum stress that a material can take before it fails. The specimen
however does not fail at this point.
After this point, the curve starts dropping.
Breaking Point:
This is the point at which the specimen fails.
After the ultimate stress point, necking of the specimen takes place, which causes a loss in the
load carrying capacity of the specimen and ultimately causes it to fail.
This point is represented on the curve, by point ‘F’.
Properties of materials:
1.
Strength:
–
Strength is the ability of materials to with stand various force to which it is subjected
during a test or service
–
It is usually described as tensile strength, compressive strength, shear strength etc…
2.
Ductility:
- Property of material by virtue of which material undergoes plastic deformation without
failure under tensile force.
- Tensile test is done for ductile material. Carbon content in steel determines the ductility of
steel. Increase in carbon content in steel increases the strength and hardness but decreases
ductility and toughness.
- Fe415 is more ductile than Fe500.
- Ductile material fail slowly giving warning sign.
- Long permanent elongation due to tensile force before fracture/failure.
6.
3.
Elasticity:
– Property of the materials to return back into its original position after the removal of load.
4.
Plasticity:
– Property of the materials which do not return back into its original position after the removal
of load.
5.
Creeps:
- Time dependent continuous deformation under the sustained load.
- Property of material by virtue of which material undergoes continuous deformation with time
under constant (sustained) load.
6.
Brittleness:
– It is the opposite of ductility.
– Brittle materials fails suddenly without warning when stressed beyond their strength.
– They cannot accommodate much change in shape without rupture.
7.
8.
9.
10.
11.
12.
13.
14.
15.
Hardness:
– It is the ability of materials to resist abrasion or cutting, scarring etc.
– A hard materials resists scratches by friction with another body.
Toughness:
– It is the property of the materials which enables fracture.
– The resistance of materials to fracture by bending, twisting, fatigue or impact of load is
known as toughness.
Fatigue:
– Permanent internal structures damages due to repeated load.
– For examples loads acts at bridge.
Malleability:
–
It is the Property of being permanently extend into sheets without fracture when rolled or
hammered.
Tenancy:
– Ultimate tensile strength of materials is called tenancy.
Stiffness:
– The load required to produce unit deflection.
Endurance limit:
– The stress below which a materials has a probability of not failing under reversal of stress is
known as endurance limit.
Resilience:
– Strain energy stored with the elastic limit is called resilience.
Proof Resilience:
– The maximum strain energy stored at the elastic limit is called proof resilience.
7.
16.
Modulus of Resilience:
– The proof resilience per unit volume is called modulus of resilience.
– Modulus of Resilience (MOR) = Ошибка!× σ ×Ɛ
Where, σ = stress
Thermal strain: (Ɛt)
–
Change in dimension of a body due to temperature with respect to its original dimension is
called thermal strain.
–
Mathematically, (Ɛt) = (ΔL)t / L
(Ɛt) = α ΔT –––– (i)
Where, α = coefficient of thermal expansion.
Note:
- Steel (α) = 11 × 10–6/°c (α)
- Concrete (α) = 12 ×10 –6/°c
- Copper (α) = 17.5 ×10–6/°c
- Alum (α) = 21 × 10–6/°c
Relationship between three elastic module (E, G & K) and poison's ratio ()
From the definition of Poisson's ratio, we have;
=
−lateral strain
longitudinal strain
= - Ԑ lat /Ԑ long
Also from definition of elastic moduli;
longitudinal stress
E = longitudinal strain = σ / Ԑ long
shera stress
G = shear strain = τ / γ
volumetric stress
K = volumetric
strain
= σv /Ɛv
Now, combining equations above relations, we get;
E = 2G (1 + ) –––––– (1)
E = 3K (1 – 2) ––––– (2)
E = Ошибка! –––––––– (3)
Where, E = young modulus of elasticity
G = shear modulus of rigidity
R = bulk modulus.
= Poisson's ratio.
8.
Strain–Stress Relationship
E
B
Gy = yield
Stress
F
C
D
A
erastic
Zone
O
plastic
zone
Yielding
Strain
energy
Necking
(Strain)
Figure: Stress–Strain diagram of mild steel.
In figure
1)
A = proportionality limit:
– The portion OA is linear elastic zone in which stress-strain relationship is a straight line.
2)
B = Elastic limit:
– AB is non-linear elastic zone.
– The maximum value of stress up to which materials returns to its original shape.
– Hook's law flow up to this point.
3)
C = upper yield stress
4)
D = lower yield stress
5)
E = ultimate strength point
6)
F = Breaking failure /Rupture.
1. Yield strength:
–
Yield strength or yield point of a materials is defined as the stress at which the materials
beings to deform plastically.
–
Prior to the yield point the material to deform elastically and will return to its original
shape when the applied stress is removed.
2. Ultimate tensile strength:
–
Ultimate tensile strength (tensile strength or ultimate strength) is the maximum stress that
a material can withstand while being stretched or pulled before failing or Breaking.
–
It is determined by dividing maximum load by the cross-sectional area of the specimen.
3. Breaking Stress:
–
The stress required to fracture a materials is called breaking stress.
–
Normal breaking stress is always lesser than actual breaking stress since original crosssectional area of specimen is always greater than actual cross-sectional area under tensile
load.
Note:
9.
Young modulus is inversely proportional to temperature.
Modulus of elasticity, (E) = Ошибка! =
σ
–––––––––––––––––– (i)
Ɛ
Modulus of ridging (G) = Ошибка! = Ошибка! –––––––––––––––(ii)
σ
Back modulus (K) = Ошибка! = 𝛿𝑉 ––––––––– (iii)
𝑉
Young modulus is greater than modulus of rigidity (E > G)
Poisson's ratio of rich mix concrete is greater than that of lean mix concrete. (rich >lean)
Change in length (l)
Change in length due to load P in a member of length (l) having cross-sectional area A, is
= Ошибка! –––––– (i)
Most Confusing Questions
Q1. Hook's law follow up to
a) Proportionality limit
b) Elastic limit
c) Ultimate point
d) Breaking point
Ans: (a) (mathematically, the hook's law statement is valid up to proportional limit only)
Q2. Hook's law follow up to:
a) Elastic limit
b) Ultimate point
c) Yield point
d) Breaking point
Ans: a) (if there is no proportional limit is given in option go for elastic limit)
Structural property:
1.
Stability:
– Ability to remain in equilibrium.
2.
Strength:
– Ability to resists the load without failure.
3.
Stiffness:
– Material stiffness is a measure of how much of a load it takes to cause elastic deformation in the
material.
– In short, it is Ability to resist deformation of body.
– Stiffness can be modified with geometry.
Strain Energy:
Strain Energy is stored energy within the elastic limit which resist the deformation.
S.E due to A.F = Ошибка! ––––––
–––– (i)
P
S.E due to S.F = Ошибка! ––––––
––– (ii)
A.P
S.F
B.M
S.E due to B.M = Ошибка! –––––
–––– (iii)
Where, A = Cross –sectional area
10.
V = Shear force
E = Young modulus of elasticity
G = Shear modulus of rigidity
M = Bending moment
I = Moment of Inertia
J = Polar moment of inertia
K= Form factor that depends on the cross section.
Deformation of member:
1.
Due to Axial load
l = Ошибка! –––––––– (i)
l
2.
3.
Tapering Bar:
l = Ошибка! –––––––– (ii)
Trapezoidal section
l = Ошибка! × ln Ошибка! –––––
l
P
I l
P
d1
(iii)
Numerical problem
Q1. Total elongation produced in a bar due to its self-weight is given by:
a)
Ошибка!
b) Ошибка!
c)
Ошибка!
d) Ошибка!
Ans: (b)
Solutions: = Ошибка! = Ошибка!
= Ошибка! = Ошибка! Ans.
Slenderness Ratio:
It is the ratio of effective length of the column to the least radius of gyration.
Mathematically,
Slenderness ratio, () = Ошибка!
Where,
r = least radios of gyration = Ошибка!
l = effective length of column
Ultimate load:
The largest force applied on the test pieces which breaks the sample or brings to carry fewer
load is called ultimate load.
11.
Ultimate Stress:
The ratio of largest load in a test sample to the original cross-sectional area of the test sample,
is
called ultimate stress of strength
Center of gratuity, centroid and moment of Inertia
c.g
2D-Body
Area
Centroid
(i)
3D-Body
R
Volume
Center of gravity
Center of gravity:
C.G of the body is that point through which the resultant of the parallel forces formed by the
weight of all particles of the body passes.
It is center of mass through which earthquake load is assumed to be passed.
It may also lies outsides of the body.
(ii)
C.g =(x, y) = Ошибка!, Ошибка!
Centroid:
The plane figure having only area but not mass.
The geometrical center of area of such figure is called centroid.
It is the center point of area.
Centroid = g (x, y) = Ошибка!, Ошибка!
(iii) Axis of symmetry:
Such line or plane that divides the whole body into two equal parts (half).
It passes always centroid or c.g.
C.g of different types of geometric figure
1.
C.g of a uniform rod is at its middle point.
2.
The c.g of rectangle, square or parallelogram is at the point of intersection of is diagonals.
3.
The c.g of triangle is at the point, where the three medians of the triangle meets.
(A line joining the vertex and the middle point of the opposite side is called median)
4.
The c.g of a semi-circular arc is at
2𝑟
𝜋
above the base.
5.
The c.g of semi-circle is at Ошибка! above the base.
6.
The c.g of quadrant circles is at Ошибка!above the base of the vertical face.
7.
The c.g of right circular solid cone is at a distance of Ошибка!from it's base, along full vertical
radius.
12.
8.
The c.g of a thin hollow right circular cone is at a distance of Ошибка! from it's base, along the
vertical axis.
9.
The c.g of solid pyramid or cone is at Ошибка! of the total height above base.
10. The c.g of hollow pyramid or cone is at Ошибка! of total height above base.
11. The c.g of a parabola is at Ошибка!th of the axis OB above Ac.
12. The c.g of the solid hemisphere is at a distance of Ошибка! from it's base, along the vertical
radius.
13. The c.g of the thin hollow hemisphere is at a distance of Ошибка! from it's base, along the
vertical radius.
Moment of Inertia (MOI)
- The second moment of area is called moment of inertia and the second moment of mass is
called mass moment of inertia.
- It resists to deformation so greater the value of (I) better the structures.
-
Its value is always positive and its unit is mm4 or m4 or cm4. For mass moment of inertia its
unit is Kg-m2
Mathematically,
𝐴
Moment of inertia about X-axis (𝐼𝑥𝑥 ) = ∫0 𝑦 2 𝑑𝐴
-
Moment of inertia about Y-axis ( 𝐼𝑦𝑦 ) = ∫0 𝑥 2 𝑑𝐴
-
𝐴
Significance of Moment of Inertia:
The moment of inertia is a physical property of an object that describes its resistance to rotational motion
about an axis. The significance of moment of inertia can be seen in a number of different applications,
including engineering, physics, and mathematics.
Some of the key significance of moment of inertia are:
Rotational motion: Moment of inertia is a fundamental concept in rotational motion. It is used to
determine the angular acceleration of an object when a torque is applied to it.
Stability of structures: Moment of inertia is also important for determining the stability of
structures, such as buildings and bridges. A structure with a higher moment of inertia is less likely to
be affected by external forces or changes in the environment.
Design of machinery: Moment of inertia is critical in the design of machinery, such as motors and
flywheels. It helps engineers to determine the amount of torque that is needed to overcome the
moment of inertia and set the object in motion.
Energy conservation: The moment of inertia is an important factor in the conservation of energy in
rotational motion. It helps to determine the amount of kinetic energy that is stored in a rotating
object, which can be used to calculate its potential energy.
Calculus: Moment of inertia is used in calculus to solve problems related to area, volume, and mass
distribution. It is an important concept in calculus and is used in a variety of different applications.
13.
Overall, the moment of inertia is an essential concept for understanding rotational motion, stability, and
energy conservation.
Moment of inertia of different geometric figures:
1)
Rectangular section:
I = Ошибка! (about c.g)
I = Ошибка! (about base)
D
D
2)
Hollow rectangular section
I = Ошибка!
3)
Square section:
I = Ошибка!
B
b
D
d
a
4)
5)
6.
7)
8)
a
a
a
Solid circular section
I = Ошибка! (where D = diameter of circle)
Hollow circular section:
I = Ошибка! Ошибка!
Semi-circular section
I = Ошибка!
Elliptical section
I = Ошибка! BD3
Triangular section
h
I = Ошибка! (about
base)
b
I = Ошибка! (about
c.g)
Radius of gyration
Radius of gyration of a body about the axis of rotation is defined as the radial distance to a
point which would have a moment of inertia the same as the body's actual distribution of mass,
if the total mass of the body were concentrated there.
Y
Y
G
X
Kxx
Mathematically
Ixx = A Kxx2
Radius of gyration about X-axis is given by
14.
X
Kxx = Ошибка! ––––––– (i)
Similarly,
Radius of gyration about y-axis is given by
Kyy = Ошибка! –––––––– (ii)
Polar radius of gyration:
-
Moment of inertia perpendicular to the axis of plane figure is called polar moment of inertia.
Moment of inertia about the axis perpendicular to plane is equal to the sum of MOI about Ixx
and Iyy i.e. Izz = Ixx +Iyy
Significance of Radius of Gyration:
The radius of gyration is a physical property of an object that describes how its mass is distributed around an
axis of rotation. The significance of radius of gyration can be seen in a number of different applications,
including engineering, physics, and mathematics.
Some of the key significance of radius of gyration are:
Rotational motion: Radius of gyration is a fundamental concept in rotational motion. It helps to
determine the moment of inertia of an object, which is an important factor in understanding its
behavior under different loading conditions.
Stability of structures: Radius of gyration is also important for determining the stability of structures,
such as buildings and bridges. A structure with a smaller radius of gyration is less likely to be affected
by external forces or changes in the environment.
Design of machinery: Radius of gyration is critical in the design of machinery, such as motors and
flywheels. It helps engineers to determine the amount of torque that is needed to overcome the
moment of inertia and set the object in motion.
Strength of materials: The radius of gyration is an important factor in determining the strength of
materials, such as beams and columns. A material with a larger radius of gyration will be more
resistant to buckling and other types of deformation.
Calculus: The radius of gyration is used in calculus to solve problems related to area, volume, and mass
distribution. It is an important concept in calculus and is used in a variety of different applications.
Overall, the radius of gyration is an essential concept for understanding rotational motion, stability, and
strength of materials.
Uniform strength of Beam:
- A beam in which extreme fiber stresses are maximum at every section is called uniform
strength beam.
- Under this condition the bending stress is same throughout the beam.
Mechanics of Materials:
Engineering mechanics is the branch which deals with the principle of mechanics effects of
force with their application to engineering problem.
It is divided into two needs
15.
1) Statics
2) Dynamics
– Kinetic
– Kinematic
Internal Effects of loading
Force:
- It is an agent which produced or tends to produce, destroy or tends to destroy the motion of
body system of forces are:
- Coplanar forces = Forces whose line of action lies on the some plane.
- Concurrent forces = Forces which melt at one point and their line of action also lie on the same
plane.
- Coplanar non-concurrent forces = forces which do not melt at one point but their line of action
lie on the same plane.
- Non-coplanar non-concurrent forces = forces which do not melt at one point their line of action
do not lie on the same plane.
Flexure equations or Beading equations
Assumptions
(i)
Plane of cross section of beam remains plane before and after bending.
(ii)
Material of beam obeys Hooke’s law.
(iii) Modulus of elasticity for tension and compression is same.
(iv)
Beam bends to circular arc.
(v)
Load acts perpendicular to the beam axis
Mathematically,
Ошибка! =
σ
y
= Ошибка! –––––– (i)
Where,
M = Bending moment or moment of resistance.
I = Moment of inertia about c.g.
σ = Bending stress i.e. tension or compression
y = Distance from neutral axis to the extreme fiber.
E = Young modulus of elasticity
R= Radius of curvature
Ошибка! = curvature.
Section modulus:
16.
- Section modulus or modulus of a section of a beam is the quantity obtained by dividing the
moment of inertia of the beam, about its C.G by the distance of extreme fiber from the central
axis.
Mathematically,
Section modulus (Z) = Ошибка! –––– (i)
Significance of Section Modulus:
The section modulus is a property of a structural cross-section that describes its ability to resist bending
stresses. It is a measure of the shape's resistance to bending deformation. The significance of section
modulus can be seen in a number of different applications, including engineering and construction.
Some of the key significance of section modulus are:
Strength of structures: A higher section modulus means that the structure is more resistant to bending
and deformation, and is therefore stronger and more stable.
Design of structures: The section modulus is an essential parameter in the design of structural
members, such as beams, columns, and trusses. Engineers use the section modulus to determine the
required cross-sectional area of a structural member to resist a given bending moment.
Material selection: The section modulus can also be used to compare the strength of different
materials. By comparing the section modulus of different materials, engineers can select the most
appropriate material for a given application.
Optimization of structures: The section modulus can be used to optimize the design of structures by
minimizing the amount of material used while maintaining adequate strength and stability.
Calculation of deflection: The section modulus is also used to calculate the deflection of structural
members under bending loads.
Qn. The Section modulus of rectangular cross section is proportional to…..
(a) A (Area)
(b) D (depth)
(c) Product of Area & depth
(d) None of the above
Ans: C
Hint:
Z = Ошибка! = Ошибка! = Ошибка! × A ×d –––––– (ii)
Note:
- Bending stress in neutral axis is zero.
- Shear stress in neutral axis is maximum.
17.
Neutral axis:
- An imaginary horizontal line that passes through c.g of transverse cross-section and at which
bending stress is zero and shear stress is maximum.
Deformation:
- Shift the particles with in the elastic limit.
Displacement:
- Shift beyond the elastic limit. i.e., the large deflection which can be seen by necked eye.
l
A
W
W
l
C
l
D
B
W
W
S.F.D
W
B.M.D
wl
2
wl
2
- Bending due to the constant maximum bending moment when shear force is zero is called pure
bending.
- In figure, pure bending in CD portion.
Note:
- From shear force diagram vertical stamps can be designed.
- From bending moment diagram longitudinal bar can be designed.
- Bending stress distribution is triangular.
- Shear stress distribution is parabolic.
- The most efficient section for the flexure member is I-section.
- At neutral axis both bending stress and strain are zero.
Load/force:
- It may be defined as an agent which produce or tends to produce, destroys or tends to destroys
motion.
Types of Load:
1.
Point load:
18.
- It is a load which is assumed to act at a point.
- It is also called concentrated load.
- The unit of concentrated load is Nor KN.
w
l
Fig: point load
2.
Uniformly distributed load:
- It is a load which is distributed uniformly over the length of beam.
- The unit of UDL is N/M or KN/M
vdl (KNLM)
l
Fig: Uniformly Distributed Load (UDL)
3.
Uniformly varying load (UVL):
- It is a load which is distributed not-uniformly over the length of the beam.
- It's two types
(i) Trangular load
l
(ii) Trapezoidal load
l
Fig. Uniformly Varying Load (UVL)
Types of Support:
1. Simple support:
- A simple support offers only a vertical reaction.
- Horizontal moment or rotation of the member are not prevented at this support.
- Examples: masonry wall.
- Rotation () = , H. displacement = , V displacement = 0
V=O
Fig: Simple support
2. Roller support:
- It is similar to simple support.
- The support which provided with roller is called Roller support.
- Examples: Roller bearing for bridge trusses.
- Θ(Rotation) = , H. displacement = and V. displacement = 0 (Zero)
19.
V
Fig: Roller support
3. Hinged /pin support:
- The support which is connected to the structure with frictionless pin is known as hinge support.
- This types of supports prevents both horizontal and vertical movements.
- Examples: Single riveted lap joint.
4. Fixed support:
- The support which provided resistance to rotation about the support and to the movement in
vertical and horizontal direction is called a fixed support.
M
H
V
Fig: fixed support
= 0 (Rotation), H displacement = 0, and V displacement = 0.
Notes:
- Single member can't be connected to roller support
Beam
- A member acting upon a system of externals forces at fight angle to it's axis (transverse
loading), is called a beam.
- Beams are normally placed in horizontal positions and loaded with vertical loads.
Types of beam:
1)
Simply supported Beam:
- It is a beam with one end hinged and another end roller support.
- It is used in load bearing wall.
Fig: simply supported beam
2.
Cantilever Beam:
- It is a beam with one end fixed and another end free.
Fig: cantilever beam.
20.
3.
Propped cantilever beam:
- It is a beam with one end fixed and another end simply supported.
- It is generally used in bridge construction.
Fig: propped cantilever beam
4.
Fixed beam:
- It is a beam with both ends fixed.
- It is generally used in RCC structures.
Fig: Fixed beam.
5. Continuous Beam:
- It is a beam with more than two supports.
Fig: Continuous beam.
6.
Overhanging beam:
- It is beam with at least one end out of support.
- A beam may be overhanging on one side or beam sides.
Fig: overhanging beam.
7.
Elastic propped beam
- It is a beam with one end fixed and another end elastic materials is used.
21.
Fig: elastic propped beam.
8.
Sink propped beam:
I2-3mm
- It is a beam with one end fixed and another end roller support with some vertical distance as
shown in figure above.
Notes:
- In case of cantilever slope and deflection occurs maximum at free end.
- In case of simply supported beam slope, is maximum and deflection is minimum at the free
end.
Materials:
1.
Brittle materials:
- It is the materials fails suddenly without warning when stressed beyond their strength.
- The compression test is commonly used for testing brittle materials.
2.
Homogeneous materials:
- A materials having similar property throughout its volume is called homogeneous materials.
3.
Isotropic materials:
- A materials having identical property in all the direction is called isotropic.
4.
Orthotropic materials:
- The materials which have different properties in different direction is called orthotropic
materials.
5.
Toughness materials:
- It is the property of materials which enables to absorb energy at high stress without failure.
- Impact test is done to estimate the toughness of materials.
6.
Viscoelastic materials:
- Time dependent stress-strain relation.
- The materials which shows different stress-strain relation at different time.
INTERNAL EFFECTS OF LOADING
22.
6<6y
c
N
6=6y
6=6y
6=6y =6u
c.g d
b
A
6<6y
(1)
6=6y
(2)
elastic stage
6=6y
6=6y =6u
(3)
elasto
plastic stage
(4)
plastic
stage
(plastic hinge
formed)
Where,
σy = yield stress
σ = working stress normally developed actual stress under the normal working condition
- σy = Yield stress Maximum stress that can be developed in structures with in the elastic
stage.
- σu = ultimate strength Maximum yield stress developed when all the fibers of cross-section
yields.
[Stage – I]
- The externally applied load is such that stress developed is less than the yield stress.
[Stage – II]
- If load goes increasing, at the some value of load the stress in extreme fiber rich yield stress.
[Stage – III]
- With further increasing load, the yield stress at extreme fiber remains constant but the yielding
spreads into the inner fibers.
[Stage – IV]
- Again if the applied load goes on increasing, at some value of load all the fibers will be
subjected to yield stress.
- The load carried at this stage is called ultimate load, and the strength of materials
corresponding to the ultimate load is called ultimate strength.
Structural members:
1) Beam:
- Members subjected to bending or flexure.
2) Ties/links:
- Members subjected to only axial tension.
3) Struts:
- Members subjected to only axial compression.
4) Truss:
- Groups of ties and struts.
- It consists of pin joint that transfer only the axial force.
23.
- It means only axial force developed in truss as an internal forces.
5)
Rigid frame:
- It consists of rigid joints, i.e., moment resisting joint, that transfer all the internal forces such as
axial, shear and bending moment.
MECHANICS OF BEAM:
Shear force:
- Shear force is the force acting tangential to the cross-section of the member.
- Shear force at a section is defined as the algebraic sum of transverse force acting to either side
of the section.
- The direction of shear force is perpendicular to the Centroidal axis of the member.
Positive shear force
Negative shear force
- The diagram showing the variation of shear force is called shear force diagram (SFD)
- Shear force, which tends to shear member left up and right down is called positive shear force
and vice versa is called negative shear force.
Bending moment
- Bending moment of a section is defined as the sum of algebraic sum of moment of externals
loads acting to their either sides of section.
- The diagram showing the variation of bending moment along the span is called Bending
moment Diagram (BMD).
+
Sagging curve
Hogging curve
- Bending moment which tends to bend a member as concave upward or sagging curve is
considered as positive bending moment and vice versa called negative bending moment.
-
24.
Axial force:
- It is a force acting normal to the cross-section of member.
- Axial force is the algebraic sum of all the force acting along the longitudinal axis of the
member on either sides of considered section.
- The axial force is considered as positive when it produces tension in the member and
compressive force is taken as negative axial force.
Properties of Shear and Moment Diagrams
Some important properties of shear and moment diagrams:
The area of the shear diagram to the left or to the right of the section is equal to the moment at that
section.
The slope of the moment diagram at a given point is the shear at that point.
The slope of the shear diagram at a given point equals the load at that point.
The maximum moment occurs at the point of zero shears
When the shear diagram is increasing, the moment diagram is concave upward.
When the shear diagram is decreasing, the moment diagram is concave downward.
Relationship between Load, shear force and Bending moment.
To show the relationship between Load, Shear force and Bending moment;
Let us consider a simply supported beam of length 'L' subjected to a uniformly distributed load 'w' per unit length over its
entire length as shown in figure below:
25.
Figure: simply supported beam subjected to UDL
Here, R1 = R2 =
𝑤𝐿
2
Figure: Shear force and moment at section 'C'
Let Vx be the shear force at a distance 'x' (i.e., at point C) from the left support and Mx be the bending
moment at the same point.
The beam is in a state of static equilibrium, and therefore the sum of all forces and moments acting on the
beam must be zero.
Therefore, Shear force at point C (at distance x from left support) is given as;
Vx = (ΣFy)Left = R1 – w.x
or, Vx =
𝑤𝐿
2
- w.x
{since, R1 =
𝑤𝐿
2
…………………………..(1)
Similarly, the moment at C is given as;
MX = (ΣMC) =
𝑤𝐿
𝑤𝐿
2
or, MX = 2 x - w
𝑥
. x− w.x.(2)
𝑥2
2
……………………………………..(2)
If we differentiate equation (2) with respect to x, we get;
𝑑𝑀𝑥
𝑑𝑥
26.
=
𝑤𝐿
2
– w.x
………………………………………….(3)
}
From equation (1) and (3), we have;
𝑑𝑀𝑥
𝑑𝑥
Thus,
=
𝑤𝐿
2
– w.x = Vx = shear force
𝒅𝑴
𝒅𝒙
= shear force (V) ⇒ the rate of change of the bending moment with respect to x is equal to the
shearing force or the slope of the bending moment diagram at the given point is the shear at that
point.
Again, differentiating equation (1) with respect to x, we get;
𝑑𝑉𝑥
𝑑𝑥
Thus,
= – w = load intensity
𝒅𝑽
= load ⇒ the rate of change of the shearing force with respect to x is equal to the load or the slope of the
𝒅𝒙
shear diagram at a given point equals the load at that point.
Equation of Curvature
Deflected shape of beam is called elastic curve. In case of pure bending, it is arc of a circular
otherwise parabola.
𝑑𝑦
(𝑖) Ѳ𝑥 = 𝐸𝐼 i.e., Rate of change of deflection is called slope.
𝑑𝑥
(𝑖𝑖)
(𝑖𝑖𝑖)
(𝑖𝑣)
𝑑Ѳ
𝑑2 𝑦
= 𝑑2 𝑥 𝐸𝐼 = 𝑀𝑥 (Bending Moment) i.e. Rate of change of slope is called bending moment or
𝑑𝑥
curvature.
𝑑3 𝑦
𝑑𝑀
𝐸𝐼 = 𝑑𝑥 = 𝑉𝑥 (Shear Force) i.e. Rate of change of BM gives the value of shear force i.e.
slope of BMD gives the value of shear force at that point.
𝑑3 𝑥
𝑑4 𝑦
𝑑𝑉
𝐸𝐼 = 𝑑𝑥𝑥 = 𝑊𝑥 (Load Intensity) i.e. Rate of change of shear force gives intensity of load
i.e. slope of SFD give the load intensity at that point.
𝑑4 𝑥
EI: Flexural Rigidity: EA: Axial Rigidity: GA: Shear Rigidity: GJ: Torsional Rigidity
Notes:
1.
The rate of change of strain energy is called deflection.
2.
The rate of change of deflection is called slope.
3.
The rate of change of slope is called curvature bending moment.
4.
The rate of change of curvature bending moment is called shear force.
5.
The rate of change of shear force is called intensity of loading.
27.
Types of loads:
A) External forces:
B)
Point load
Surface tension
Body force
Translation force
Rotational force
Uniformly distributed load (UDL)
Uniformly varying load.
Internal forces:
-
Axial forces
Shear forces
Bending moment.
Point of contra flexure /Point of inflection:
28.
-
The point at which bending moment is zero and through which Bending moment diagram changes
its sign from positive to negative or vice-versa
-
In simpler terms, it is the point at which the curvature of a beam or curve changes from convex to
concave or vice-versa and the bending moment changes from positive to negative or vice-versa.
-
At that point, beam is flexes in opposite direction.
It is also called point of inflexion or virtual hinge.
-
At the point of contra flexure, the bending moment is zero, which means that there is no bending
force acting on the beam or curve at that point
-
This point is important in structural engineering because it can affect the strength and stability of a
structure
-
*There is no point of contra flexure in simply supported beam.
Nature of SFD and BMD
29.
Note:
-
At the point of maximum bending moment (BM), shear force changes the sign (Zero except
point load).
- At point where shear force is zero, BM either maximum or minimum.
- The point where BM changes its sign known as point of contra flexure or inflection point or
virtual hinge.
- The point where BM changes its sign known as point of contra flexure or inflection point. It
occurs in fixed beam, continuous beam and overhanging beam. There are two (2) point of
contra flexure in fixed beam and overhanging beam.
- In case of point loading, BM is maximum at the point of application of load.
- Most economic section of beam is I-section. Web of I section carries shear force and flange
part carries 80% of bending moment.
a. Cantilever Beam
Loading
Shear Force (S.F)
Bending Moment (B.M)
Moment (m) at the end of Zero
beam
M
Point load at free end
Vmax = W (constant)
Mmax = wL at support
UDL
Vmax = wL at support
Mmax = wL2/2 at support
* In case of cantilever beam, maximum BM always occurs at support and failure of beam starts from
support. There is no point of contra flexure in cantilever beam.
(b) Simply Supported Beam
Loading
(i) Point Load at Mid Span
Shear Force(S.F.)
Max at support = W/2
Bending Moment(BM)
Max.BM= WL/4 at centre
(ii) UDL ( constant load )
Vx = wL/2 - wx
Max at support= wL/2
Mx=wx2/2-wL/2x
Max BM = wL2/8 at centre
(iii)Triangular load (UVL)
Vx=WL/4 - wx2/L
(V)max= WL/4 at Support
Mmax=wL2/12
*There is no point of contra flexure in simply supported beam.
(c)Fixed Beam
30.
Loading
(i) Point Load at centre
SFD
Vmax=W/2
BMD
Mmax=WL/8
(ii) UDL
Vmax=wL/2
Mmax=wL2/12
Fixed Beam:
It is a type of beam with both ends are fixed.
M
M
V
V
H
H
fig: Fixed beam.
S.N
1.
Nature of load
point load at center
BM (max)
Max Deflection
Ошибка!
Ошибка!
2.
Uniformly
Distributed load.
Ошибка!,
3.
4.
Ошибка!
Ошибка!
(centre)
Triangular (0 at one Ошибка!, Ошибка!
end and w at other
end)
Ошибка!,
Triangular (o at 0.00131 WL2
both end and W at
center)
Ошибка!
Ошибка!
(centre)
Notes:
W
L
(i)
case (1)
L
(ii)
case (2)
W
W(kN/m)
W(kN/m)
L
L
(iii)
case (3)
(iv)
case (4)
Deflection of Beam
Beam and Loading
Slope
(i)Moment 'M' at free end
ML/EI
Deflection
ML/2EI
2
(i)Cantilever point load at free 𝜃 = W𝑙 /2𝐸𝐼 at free end
end
∆= 𝑊𝑙 3 /3𝐸𝐼 at free end
(ii) Cantilever with UDL
𝜃 = W𝑙 3 /6𝐸𝐼 at free end
∆= 𝑊𝑙 4 /8𝐸𝐼 at free end
(iii)S.S. point load at center
𝜃 = W𝑙 2 /16𝐸𝐼 at support
∆= 𝑊𝑙 3 /48𝐸𝐼 at centre
(iv)S.S. with UDL
𝜃 = W𝑙 3 /24𝐸𝐼 at support
∆= 5𝑊𝑙 4 /384𝐸𝐼 at centre
Note:
*In case of cantilever beam slope at support always zero.
*In case S.S. beam with symmetric loading, slope at center always zero.
31.
Since, Deflection (∆) 𝜶
𝟏
𝑰
𝒐𝒓
𝟏
𝑩𝑫𝟑⁄
𝟏𝟐
i.e. (∆) ⍺ 1/ D3 or 1/B. For eg. If depth of beam is doubled,
deflection will be reduced by 1/8 times.
Characteristics of S.F.D and B.M.D
1.
Diagram
Load
Point Load
U.D.L
U.V.L
S.F.D
Horizontal or Vertical Triangle
line
Sq. Parabola
B.M.D
Inclined straight line ( Sq. Parabola
Triangle)
Cu. parabola
Static equilibrium:
- A particle or a rigid is said to be in static equilibrium if it is at rest.
- Static equilibrium means the net force and the net moment acting or a body is zero.
Equation of static equilibrium (for rigid body):
Fx = 0
Fy = 0
M =0
for 2D objects
Fx = 0
Fy = 0
Fz = 0
Mxy = 0
Myz = 0
Mxz = 0
for 3D objects
Equation of static equilibrium (for deformable body):
In a three-dimensional (3D) deformable body, the equation of static equilibrium can be written as:
∇ • σij + Fi = 0
where:
∇ = (∂/∂x) i + (∂/∂y) j + (∂/∂z) k
i, j, and k are the unit vectors in the x, y, and z directions, respectively
∂/∂x, ∂/∂y, and ∂/∂z are the partial derivative operators with respect to x, y, and z, respectively.
'σij' is the stress tensor, which describes the internal stresses within the body
32.
Fx
'Fi' is body forces = {Fy
Fz
Types of equilibrium
Stable
equilibrium
Unstable
equilibrium
Neutral
equilibrium
1) Stable:
- If the body returns back to its original position when it is slightly displaced from its
position of rest, Then is it called stable equilibrium.
2) Neutral:
- A body is said to be in neutral equilibrium if it is occupies a new position and remains at rest in
that position when it is slightly displaced from it's original position.
3) Unstable:
- Opposite to the stable equilibrium.
Tangent modulus:
- The tangent modulus is the slope of the stress strain curve at any specified stress or strain.
- Below the proportional limit the tangent modulus is equivalent to young modulus.
i.e. Tangent modulus = young modulus.
- Above the proportional limit the tangent modulus varies with strain and is most accurately
found from test data.
- Young modulus is inversely proportional to temperature.
i.e Ошибка!
33.
Static determinate and indeterminate structure:
-
If the unknown internal forces and reactions can be solved only using static equilibrium
equations, then the structure is said to be determinate. Otherwise, it is statically indeterminate
structure.
Frame
3m+r = 3j+ c
3m+r > 3j+ c
3m+r < 3j + c
Truss (Pin Jointed)
m + r = 2j
m + r > 2j
m + r < 2j
Determinacy
statically determinate
statically indeterminate
Unstable, mechanism
Types of Support:
Type of
Support
Roller support
Reactions (R)
One reaction, perpendicular to the rolling plane
Deformations or degree of freedom
(3-R)
2
Hinge Support
2 Reactions(1 Vertical and 1 Horizontal)
1
Fixed Support
3 Reaction(1 Vertical, 1 Horizontal and Moment)
0
Types of structures:
i)
ii)
iii)
m + r = 2j Determinate structures
m + r < 2j Unstable structures
m + r > 2j Indeterminate structures.
Where,
m = no. of members
J = no. of joints in that structures.
r = no. of reaction components
Simple strut Theory:
- A structure subjected to an axial compressive force is called strut. if the strut is vertical (90° to
horizontal, it is known as column or pillar or stanchion)
- Strut may have it's one end or both ends fixed rigidly or hinged or pin jointed while column
will have both ends fixed rigidly.
Compression member:
Column:
-
Column is compression member which carries axial compression in frame structure.
Most economic section of column is tubular section.
Classification of Column
34.
𝑙𝑒
𝑑𝑚𝑖𝑛
≤3
; Pedestal
-
-
3<
𝑙𝑒
𝑑𝑚𝑖𝑛
𝑙𝑒
𝑑𝑚𝑖𝑛
≤ 12 ; Short Column or 10 < Ошибка! < 40
> 12
; Long Column or Ошибка! > 40
Where, le = effective length of column, dmin = least lateral dimension of column and rmin =
least radius of gyration.
For steel Column
𝑙𝑒
< 50 ; Short Column
𝑅
𝑚𝑖𝑛
50 < 𝑅
𝑙𝑒
𝑅𝑚𝑖𝑛
𝑙𝑒
𝑚𝑖𝑛
< 250; Intermidiate Column
< 250 ; Long Column
𝑊ℎ𝑒𝑟𝑒 rmin least radius of gyration.
Modes of failure of column
Column type
Short
Mode of failure
Crushing
Long
Buckling
Intermediate
Crushing and Buckling combined
Strut:
- A long structural member subjected to compression load.
- Member of truss which carries only axial compression is known as strut.
- Tension member of truss is known as tie.
Slenderness ratio:
- It is the ratio of effective length of member to its least radius of gyration and is given by:
= Ошибка!
Where, le = effective length depending on its end support conditions.
rmin = Minimum radius of gyration
rmin = K = Ошибка! = Ошибка!
Note:
We take minimum moment of inertia (Imin) because resistance to bending is determined by the
minimum one (1)
The slenderness ratio, should not exceed the values given below:
S.N. Types of member
1.
Maximum
max
For compression members which carry dead loads 180
and superimposed loads
slenderness
35.
ratio,
2.
For compression members which carry 250
compressive loads due to wind or seismic forces
only
3.
For members carrying mainly tension in a roof 350
truss or a bracing
4
Tension members
members)
(other
than
pre-tensioned 400
Euler’s theory for crippling Load:
- Load under which column fails due to the bulking is known as crippling load or critical load.
This theory is only valid for long column.
𝑷=𝑪∗
𝝅𝟐 𝑬𝑰𝒎𝒊𝒏
-
Crippling or Critical Load
-
Column's fails by bucking when their critical load is reached.
𝒍𝟐𝒆
Where,
P = crippling load/ crushing load /Bucking load
E = young modulus of elasticity for the materials.
C = factor accounting for the end condition
I = The least second moment of area of the section (mm4, m4)
le = Effective length of column
Illustration End conditions
in figure
Coefficients Effective
(C)
(let)
(i)
Both ends hinged or pin jointed
1
1
(ii)
Both ends fixed
4
0.5L
(iii)
One end pin jointed (hinged) other end fixed
2
0.7L = L / √2
(iv)
One end fixed, other end free
0.25
2L
(v)
One end fixed other end free to sway
1
1.2L
(vi)
One end hinged, other end free (fixed against 2
rotation but free to translate)
36.
2L
length
(i)
(ii)
(iii)
(iv)
(v)
(vi)
Figure: Column end conditions
Note:
Column type
(i) Both end pinned
Effective Length(le)
le=l
ii) One end fix and other end
pinned
(iii) Both end fixed
𝑙𝑒 = 𝑙⁄ or 0.70l
√2
(iv) One end fixed and other end
is free
le=2l
le=l /2
Crippling load
𝝅𝟐 𝑬𝑰𝒎𝒊𝒏
𝒍𝟐
𝟐
𝟐𝝅 𝑬𝑰𝒎𝒊𝒏
𝒍𝟐
𝟐
𝟒𝝅 𝑬𝑰𝒎𝒊𝒏
𝒍𝟐
𝟐
𝝅 𝑬𝑰𝒎𝒊𝒏
𝟒𝒍𝟐
Moment
The moment of force about a given point is the product of magnitude of the force and the
perpendicular distance of the point from the line of action of the force.
Mathematically.
Moment = perpendicular distance × forces.
= d * F.
Torque:
It is to be consider that the point and the line of action of force should be in the same plane
otherwise torque is produced.
Couple:
The combination of two equal and opposite force acting along different lines of action on a
rigid body is called couple.
Couple = F × l
37.
l
F
F
Core or Kern or Kernel:
-
The portion of column within eccentric loading is allowed without producing tensile stress
in column.
It is also known as Middle third zone.
For rectangular column, core is rhombus of B/3, D/3.
For circular section, core area of diameter D/4.
ANNEX-1
Area and C.G of some geometry:
38.
Moment of inertia of some geometry:
39.
Slope and Deflection of beams:
40.
There are some methods to find these slope and deflection in beams which includes
a.
b.
c.
d.
e.
f.
g.
Double integration method : valid for finding slope and deflection for one load at a time
Macaulay's method
Superposition method
Moment area method
Graphical method ( Mohr's method)
Strain energy method
Virtual work method( unit load method)
41.
In short following conclusions can be drawn;
42.
Here,
1 = Simply Supported Beam With Point Load At Middle
2 = Simply Supported Beam With UDL Throughout
3 = Cantilever Beam With Point Load At Free End
4 = Cantilever Beam With UDL Throughout
5 = Fixed Beam With Point Load At Middle
6 = Fixed Beam With UDL Throughout
7 = Cantilever beam with moment at the free end
43.
44.
ANNEX-2
Drawing BMD and SFD
45.
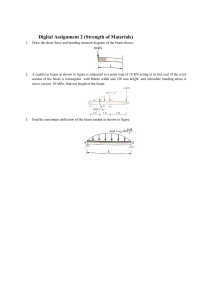
1. Draw BMD and SFD for a simply supported beam given under following loading.
Solution:
let R1 and R2 be the reaction at supports A and B respectively, as shown in figure below then,
R1 = R2 =
𝑝
2
(Since, point load is applied at center)
Shear force calculation
𝑝
SF at A (VA) = +
2
SF at just left of C (CL) = +
SF at just right of C (CR) =
SF at B (VB) = -
𝑝
2
𝑝
2
-P=-
𝑝
2
𝒑
𝟐
BM calculation
BM at A and B = 0
(since, both support being simple)
BM at C = maximum BM = R1 * L/2 = +
Now, plotting SFD & BMD;
46.
𝑃𝐿
4
2. Draw BMD and SFD for a simply supported beam given under following loading.
Solution: Let R1 and R2 be the reaction at supports as shown in figure above then,
47.
Now, Plotting SFD & BMD;
48.
3. A simply supported beam of span 5 m carries two point loads of 5 kN and 7 kN at 1.5 m and 3.5
m from the left hand support respectively. Draw S.F.D. and B.M.D. Showing important values.
Solution:
let us draw simply supported beam as per question:
Figure: given beam with reactions
Support Reactions
∑MA=0 ⇒ 5×1.5+7×3.5−RB×5= 0
∴ RB = 6.4kN
∑Fy = 0 ⇒ RA+RB - 5 -7=0
or, RA+RB = 12
∴ RA=5.6kN
SF calculations
SF at A = +5.6kN
SF at just left of C (CL) = +5.6kN
SF at just right of C (CR) = 5.6−5 = + 0.6kN
Similarly,
DL= +0.6kN
DR= 0.6−7=−6.4kN
BL= −6.4kN
BR = +6.4−6.4= 0
49.
B.M. calculation
B.M at A and B = 0
(Since support A and B are simple.)
B.M at C = 5.6 × 1.5=8.4 kNm
B.M at D = 6.4× 1.5=9.6 kNm
Now, plotting SFD and BMD
50.
4. Draw BMD and SFD for a simply supported beam with UDL, w (kN/m) on full span.
Solution:
Let Ra and Rb be reaction at support A and B respectively, then
Ra = Rb = R = wL/2
SF at A = Ra = + wL/2 = VA
SF at B = Rb = - wL/2 = VB
SF at center point = Ra - wL/2 = 0
BM at A and B = 0 (being simple support)
BM at center point (BMmax) = Ra * L/2 – (wL/2)*(L/4) = wL2 / 8
51.
5. Draw BMD and SFD for a simply supported beam with UVL on full span (zero load at first
support and w/length at other end )
Solution: Let RA and RB be the reaction at supports.
52.
Maximum moment:
53.
we get,
Now, draw SFD & BMD;
Where, V1 = wL/6
V2 = - wL/3 = Vmax
Mmax =
54.
𝑤𝐿2
9 √3
6. SFD and BMD for simply supported beam beam with uvl as shown below.
7. SFD & BMD for cantilever beam with point load at free end.
55.
8. SFD & BMD for cantilever beam with UDL
9. SFD & BMD for cantilever beam with UVL
56.
10. SFD and BMD for simply supported beam with triangular load at center and zero at support.
57.
QUESTION FOR PRACTICE AND EXAM SOLUTION
1. Define stress and strain. Explain the types of stress and strain in short.
Answer:
Stress: It is a physical quantity that describes the internal forces that act on a material per unit area.
It is defined as the ratio of the applied force or load to the cross-sectional area of the material. Stress
is commonly measured in units of force per unit area, such as Pascal (Pa) or pounds per square inch
(psi).
Strain: It is a measure of the deformation or change in shape that a material undergoes when
subjected to stress. It is defined as the ratio of the change in length or shape of the material to its
original length or shape. Strain is a dimensionless quantity.
In mechanics, stress is typically classified into various types based on the direction and nature of the forces
acting on the material. Here are the main types of stress:
Stress
Direct Stress
Indirect Stress
or simple stress
Bending Stress
Normal Stress
Or Axial Stress
58.
Combined Stress
Torsional Stress
Shear Stress
Tensile Stress
Bearing Stress
Compressiue Stress
Normal Stress:
- Stress acting perpendicular to the area of cross section.
- Stress are either compressive or tensile.
Shear Stress:
- Stress acting along or parallel to cross sectional area of member is known as shear stress.
Bearing Stress:
- Developed at the state of load transfer portion of structures.
- Example- Column of foundation load transfer.
Tensile Stress:
- That tends to elongate the body.
Compressive Stress:
- That tends to shorten the body.
Bending Stress:
- Stress due to bending moment.
Tensional Stress:
- Stress due to eccentricity load.
Types of Strain:
1. Longitudinal/ Linear/ Axial/ Normal Strain:
Normal Strain is the longitudinal directional strain due to the longitudinal directional
load.
It has two types named one is tensile strain and another is compressive strain.
Mathematically, longitudinal strain (Ԑ long) = Ошибка! ––––––––– (i)
d
P
l
l
2. Lateral /Transverse Strain:
It is lateral direction strain due to longitudinal directional load.
Mathematically, Lateral strain: (Ԑ lateral) = Ошибка! –––––– (ii)
3. Shear strain:
- It is the lateral directional strain due to the lateral directional load.
- It is the strain that changes the angle of an objects.
4. Volumetric strain:
It is defined as the ratio of change in volume to original volume.
Mathematically, (Ԑvol.) = Ошибка! = Ошибка!
2. Define the following terms.
a) Rigid Body
b) Deformable body
c) Poisson’s ratio
d) Elasticity
e) Plasticity
Answer:
a) Rigid Body: A rigid body is a physical object that does not deform or change its shape
under the application of external forces or loads. It is an idealized concept used in
mechanics to simplify the analysis of motion and deformation of objects.
b) Deformable body: A deformable body is a physical object that can change its shape or
deform under the action of external forces or loads. Examples of deformable bodies include
elastic materials, such as rubber or steel, and fluids, such as water or air.
c) Poisson’s ratio: Poisson's ratio is a material property that measures the deformation in the
material in a direction perpendicular to the direction of the applied force. Poisson's ratio
is the ratio of transverse strain to longitudinal strain in the direction of stretching force.
Poisson's ratio is a dimensionless quantity that ranges between -1 and 0.5, with values
close to 0.5 indicating incompressible materials and values close to zero indicating nearly
inextensible materials.
59.
d) Elasticity: Elasticity is the ability of a material to deform under the application of external
forces or loads and then return to its original shape when the load is removed. A material
that exhibits high elasticity can withstand large amounts of stress without permanent
deformation.
e) Plasticity: Plasticity is the ability of a material to undergo permanent deformation or
change in shape when subjected to external forces or loads beyond its elastic limit. Plastic
deformation occurs when the stress applied to a material exceeds its yield strength,
resulting in a permanent change in shape or size.
3. What are the properties of materials? Explain in short.
Answer:
Materials have various properties that are important for their selection and application in different fields. The
specific properties of a material depend on its composition, microstructure, and processing. By understanding the
properties of different materials, engineers can choose the most appropriate material for a given application.
Some of the common properties of materials are:
a) Mechanical properties: These properties describe how a material behaves under stress and
strain, such as strength, stiffness, resilience, creep, toughness, elasticity, and ductility.
b) Physical properties: Physical properties are important for understanding the behavior of
materials in different environments and under different conditions. They can be used to
identify materials. Some common physical properties of materials include: Density, Melting
and boiling point, Conductivity, Color, Transparency, Texture, Solubility, Refractive index
etc.
c) Thermal properties: These properties describe how a material responds to changes in
temperature, such as its melting point, thermal conductivity, and coefficient of thermal
expansion.
d) Electrical properties: These properties describe how a material conducts electricity, such as
its electrical conductivity, resistivity, and dielectric strength.
e) Optical properties: These properties describe how a material interacts with light, such as its
transparency, refractive index, and absorption.
f) Magnetic properties: These properties describe how a material responds to a magnetic
field, such as its magnetic susceptibility, Coercivity, and magnetic permeability.
g) Chemical properties: These properties describe how a material interacts with other
substances, such as its reactivity, corrosion resistance, and chemical stability.
h) Acoustic properties: These properties describe how a material interacts with sound waves,
such as its acoustic impedance, velocity of sound, and sound absorption coefficient.
4. State Hook's law. Show that the Relationship between three elastic module (E, G & K) and poison's
ratio ().
Answer:
60.
In the mechanics of structures, Hook's law describes the relationship between the stress and strain of an
elastic material. It states that the stress applied to a material is directly proportional to its strain, as long as
the material remains within its elastic limit. The elastic limit is the point beyond which the material becomes
permanently deformed and no longer returns to its original shape when the stress is removed.
Mathematically, Hook's law in the mechanics of structures can be expressed as: σ = Eε
Where, 'σ' is the stress applied to the material
'E' is the modulus of elasticity of the material
And 'ε' is the strain or deformation of the material.
The relationship between the three elastic moduli (Young's modulus E, shear modulus G, and bulk modulus
K) and Poisson's ratio can be expressed mathematically as:
E = 2G (1 +)
E = 3K (1 – 2)
And,
E = Ошибка!
Where, E = young modulus of elasticity
G = shear modulus of rigidity
R = bulk modulus.
= Poisson's ratio.
5. Define Resilience, proof resilience and modulus of resilience. Draw and explain stress- strain
diagram for mild steel.
Answer:
1st part:
Resilience, proof resilience, and modulus of resilience are all measures of a material's ability to absorb
energy elastically and resist permanent deformation.
Resilience: Resilience is the amount of energy per unit volume that a material can absorb without
undergoing permanent deformation. It is defined as the area under the stress-strain curve up to the
elastic limit of the material. Resilience is a measure of a material's ability to store elastic energy and
return to its original shape after being deformed.
Proof resilience: Proof resilience is the maximum amount of energy per unit volume that a material
can absorb without undergoing permanent deformation. It is defined as the maximum amount of
elastic strain energy per unit volume that a material can absorb before reaching its yield point or
elastic limit. Proof resilience is a measure of a material's ability to withstand sudden impact or shock
loading.
Modulus of resilience: Modulus of resilience is a measure of a material's ability to absorb elastic
energy per unit volume up to the elastic limit. It is defined as the area under the stress-strain curve
up to the yield point of the material, divided by the elastic strain energy per unit volume. The
modulus of resilience is a measure of a material's stiffness and ability to absorb energy elastically.
61.
2nd part:
E
B
Gy = yield
Stress
F
C
D
A
erastic
Zone
O
plastic
zone
Yielding
Strain
energy
Necking
(Strain)
Figure: stress-strain curve for mild steel
In figure
A = proportionality limit:
The portion OA is linear elastic zone in which stress-strain relationship is a straight
line.
B = Elastic limit:
AB is non-linear elastic zone.
The maximum value of stress up to which materials returns to its original shape.
Hook's law flow up to point B.
C = upper yield stress
D = lower yield stress
E = ultimate strength point
F = Breaking failure /Rupture.
6. Draw the stress strain curve for ductile materials and explain the salient points on it.
Answer:
Ductile materials undergo a large amount of deformation before failing. The following figure shows
the stress-strain curve for a ductile specimen:
62.
The salient points on the graph are given below:
a. Proportional Limit:
This limit is represented by point A on the graph.
Up to this limit, the stress and the strain induced in the specimen are directly proportional to
each other, i.e. the specimen obeys Hooke’s law.
Beyond this point, the stress is not proportional to the strain.
b. Elastic Limit:
This limit is represented by point B on the graph.
Up to this limit, the material is said to be elastic.
This implies that the specimen regains its original shape and dimensions after the removal of
the external load.
There are no residual deformations seen in the specimen, on removal of the load. After this
point, the material is said to become plastic.
c. Yield Point:
Contrary to what the name suggests, this is a region rather than a point. It is limited by the
upper yield point ‘C’ and the lower yield point ‘D’.
The stress – strain curve in this part of the graph is almost horizontal, which implies that
there is an appreciable increase in strain for a negligible increase in stress. Yielding starts at
‘C’ and ends at ‘D’. After the point ‘D’, the material, due to strain hardening again starts
taking load and the curve rises, as seen in the figure.
The material now is said to be plastic and the deformation is of nearly permanent nature.
d. Ultimate Stress:
This is shown by the point ‘E’ on the graph.
It represents the maximum stress that a material can take before it fails. The specimen
however does not fail at this point.
After this point, the curve starts dropping.
63.
e. Breaking Point:
This is the point at which the specimen fails.
After the ultimate stress point, necking of the specimen takes place, which causes a loss in
the load carrying capacity of the specimen and ultimately causes it to fail.
This point is represented on the curve, by point ‘F’.
7. What do you mean by slenderness ratio? Write down the assumption of flexure bending equations.
Answer:
The slenderness ratio of a column or beam is typically calculated as the ratio of its length (L) to its radius of gyration (r)
or the ratio of its Effective length to its least lateral dimension (width or depth).
Mathematically, Slenderness ratio = L/r or L/h
Where,
L = length of the column or beam
r = radius of gyration
h = width or depth of the cross-section
Assumptions of theory of flexure:
The plane of the cross-section of the beam remains plane after bending, and the shape of the crosssection is not distorted.
The value of E is same in both tension and compression zone.
The material of the beam is homogeneous, isotropic, and obeys Hooke's law.
The beam undergoes small deflections and strains compared to its length, which means that the
slope and curvature of the beam are small.
The stress distribution in the beam is linear, and the bending stress is proportional to the distance
from the neutral axis of the beam.
The beam is loaded in such a way that the load is applied perpendicular to the longitudinal axis of
the beam and does not cause any shear or torsion.
The beam is simply supported or clamped at its ends, and the support reactions are perpendicular to
the longitudinal axis of the beam.
The cross-section of the beam is symmetric about at least one axis of rotation.
8. Define load. What are the types of load? Explain with sketch.
Answer:
A load is any external force or combination of forces that act on a structure. Loads can include weight, wind, seismic
activity and other environmental factors that affect a structure.
Types of loads:
A) External loads/forces:
64.
Point load
Surface tension
-
1.
Body force
Translation force
Rotational force
Uniformly distributed load (UDL)
Uniformly varying load.
Point load:
- It is a load which is assumed to act at a point.
- It is also called concentrated load.
- The unit of concentrated load is Nor KN.
w
l
Fig: point load
2.
Uniformly distributed load:
- It is a load which is distributed uniformly over the length of beam.
- The unit of UDL is N/M or KN/M
vdl (KNLM)
l
Fig: Uniformly Distributed Load (UDL)
3.
Uniformly varying load (UVL):
- It is a load which is distributed not-uniformly over the length of the beam.
- It's two types
(ii) Trapezoidal load
(i) Trangular load
l
l
Fig. Uniformly Varying Load (UVL)
B)
Internal forces:
-
Axial forces
Shear forces
Bending moment.
1. Axial force:
It is a force acting normal to the cross-section of member.
Axial force is the algebraic sum of all the force acting along the longitudinal axis of the
member on either sides of considered section.
65.
The axial force is considered as positive when it produces tension in the member and
compressive force is taken as negative axial force.
2. Shear force:
Shear force is the force acting tangential to the cross-section of the member.
Shear force at a section is defined as the algebraic sum of transverse force acting to either
side of the section.
The direction of shear force is perpendicular to the Centroidal axis of the member.
Positive shear force
Negative shear force
The diagram showing the variation of shear force is called shear force diagram (SFD)
Shear force, which tends to shear member left up and right down is called positive shear
force and vice versa is called negative shear force.
3. Bending moment
Bending moment of a section is defined as the sum of algebraic sum of moment of
externals loads acting to their either sides of section.
The diagram showing the variation of bending moment along the span is called Bending
moment Diagram (BMD).
+
Sagging curve
Hogging curve
Bending moment which tends to bend a member as concave upward or sagging curve is
considered as positive bending moment and vice versa called negative bending moment.
9. What do you mean by Radius of gyration? Explain the types of support with figure.
Answer:
1st part: Radius of gyration is a property of a structural object, such as a beam or column that describes how
the object's mass is distributed relative to its axis of rotation. In other word, the radius of gyration is the
distance from the axis of rotation at which all of the object's mass could be concentrated to create an
equivalent moment of inertia.
In simpler terms, the radius of gyration is a measure of how far away the mass of a structural object is from
its center of rotation. The larger the radius of gyration, the more difficult it is to rotate the object around its
axis. It is an important parameter in engineering design, particularly in the analysis of structures subject to
bending and torsion, such as beams and columns.
66.
2nd part:
Types of Support:
1. Simple support:
A simple support offers only a vertical reaction.
Horizontal moment or rotation of the member are not prevented at this support.
Examples: masonry wall.
There is Rotation and Horizontal displacement but no Vertical displacement i.e., v = 0
V=O
Fig: Simple support
2. Roller support:
It is similar to simple support.
The support which provided with roller is called Roller support.
Examples: Roller bearing for bridge trusses.
There is Rotation and Horizontal displacement but no Vertical displacement i.e., v = 0
V
Fig: Roller support
3. Hinged /pin support:
The support which is connected to the structure with frictionless pin is known as hinge
support.
This types of supports prevents both horizontal and vertical movements.
Examples: Single riveted lap joint.
4. Fixed support:
The support which provided resistance to rotation about the support and to the movement in
vertical and horizontal direction is called a fixed support.
M
H
V
Figure: fixed support
For fixed support,
Rotation () = 0
Horizontal displacement (H) = 0, and Vertical displacement (V) = 0.
10. Define beam as a structural components of any civil engineering structures. List out types of beam.
Explain any four types of beam you have listed.
67.
Answer: In civil engineering, a beam is a structural component that is designed to resist bending and support
loads by transmitting them to its supports or foundation. Beams are typically horizontal elements that span
between two or more supports and are commonly used in buildings, bridges, and other structures to support
floors, roofs, and walls. They are designed to resist bending and shear stresses. The strength and stiffness of
a beam depend on its material properties, cross-sectional shape, and dimensions. The beam must be
designed to resist the maximum load that it is expected to support, while also meeting other design
requirements such as deflection limits and compatibility with other structural components.
Beams are classified based on their cross-sectional shape and material properties. Some common types of
beams include rectangular beams, I-shaped beams, and circular beams. The selection of the beam type and
size depends on the load requirements and the span of the beam.
Following are most common types of beam based on support conditions:
1)
Simply supported Beam:
- It is a beam with one end hinged and another end roller support.
- It is used in load bearing wall.
Fig: simply supported beam
2.
Cantilever Beam:
- It is a beam with one end fixed and another end free.
Fig: cantilever beam.
3.
Propped cantilever beam:
- It is a beam with one end fixed and another end simply supported.
- It is generally used in bridge construction.
Fig: propped cantilever beam
4.
Fixed beam:
- It is a beam with both ends fixed.
- It is generally used in RCC structures.
Fig: Fixed beam.
5. Continuous Beam:
- It is a beam with more than two supports.
68.
Fig: Continuous beam.
6.
Overhanging beam:
- It is beam with at least one end out of support.
- A beam may be overhanging on one side or beam sides.
Fig: overhanging beam.
7.
Elastic propped beam
- It is a beam with one end fixed and another end elastic materials is used.
Fig: elastic propped beam.
8.
Sink propped beam:
I2-3mm
- It is a beam with one end fixed and another end roller support with some vertical distance as
shown in figure above.
11. Define Load, Axial force, Shear force, and bending moment. Show that the relationship between
Load, shear force and Bending moment.
Answer:
Load:
A load is any external force or combination of forces that act on a structure. Loads can include
weight, wind, seismic activity, and other environmental factors that affect a structure.
Axial force:
69.
An axial force is a force that acts along the axis of a structural member, such as a beam or column.
This force can be either compressive or tensile, depending on the direction of the force relative to
the structure.
Shear force:
A shear force is a force that acts perpendicular to the axis of a structural member. It is caused by
external loads and can cause the structure to bend or deform. In other words, shear force tends to
cause one part of a structural member to slide against another part along a plane parallel to the
applied force.
Bending moment:
A bending moment is a measure of the bending or flexural stress that occurs in a structural member
when a load is applied. It is a result of the internal stresses generated by the external loads that
cause a structure to bend or deform. The bending moment is measured in units of force multiplied
by length, such as newton-meters or pound-feet.
2nd part: To show the relationship between load, shear force and bending moment; let us consider a
simply supported beam of length 'L' subjected to a uniformly distributed load 'w' per unit length over
its entire length as shown in figure below:
Figure: simply supported beam subjected to UDL
Here, R1 = R2 =
𝑤𝐿
2
Figure: Shear force and moment at section 'C'
Let Vx be the shear force at a distance 'x' from the left support and Mx be the bending moment at the same
point.
70.
The beam is in a state of static equilibrium, and therefore the sum of all forces and moments acting on the
beam must be zero.
Therefore, Shear force at point C (at distance x from left support) is given as;
Vx = (ΣFy)Left = R1 - wx
𝑤𝐿
2
or, Vx =
{since, R1 =
- wx
𝑤𝐿
2
}
…………………………..(1)
Similarly, the moment at C is given as;
MX = (ΣMC) =
𝑤𝐿
2
or, MX =
𝑤𝐿
2
x-w
𝑥
x− wx.(2)
𝑥2
2
……………………………………..(2)
If we differentiate equation (2) with respect to x, we get;
𝑑𝑀𝑥
𝑑𝑥
=
𝑤𝐿
2
– wx
………………………………………….(3)
From equation (1) and (3), we have;
𝑑𝑀𝑥
𝑑𝑥
Thus,
=
𝑤𝐿
2
– wx = Vx = shear force
𝑑𝑀
𝑑𝑥
= shear force (V) ⇒ the rate of change of the bending moment with respect to x is equal to the
shearing force or the slope of the bending moment diagram at the given point is the shear at that
point.
Again, differentiating equation (1) with respect to x, we get;
𝑑𝑉𝑥
𝑑𝑥
= – w = load intensity
𝑑𝑉
Thus, 𝑑𝑥 = load ⇒ the rate of change of the shearing force with respect to x is equal to the load or the slope of the shear
diagram at a given point equals the load at that point.
12. What do you mean by point of contra-flexure? Write difference between long column and short column.
Answer:
In structural engineering, a point of contra-flexure is a point where the bending moment changes sign
from positive to negative, or vice versa. At this point, the bending moment is zero, and the curvature of
the beam changes from concave upwards to concave downwards or vice versa. This point is also known
as a point of inflection or a point of zero moment.
Columns are vertical structural members that support loads primarily by compressive forces.
Depending on the slenderness ratio, column can be classified as either long or short.
71.
Here are the key differences between long column and short column:
S.n. Long column
1.
The column is said long if the slenderness ratio
(ratio of effective length to least lateral
dimension) is more than 12
2.
Long columns have a more buckling tendency
and low crushing tendency so, Long column
usually fails due to buckling.
3.
The load-bearing capacity of long columns is
less.
4.
The long column has less gyration radius
5.
Long columns need to be designed to resist
buckling and ensure stability
6.
Long column is weaker than short column and
usually not preferred.
Short column
The column is said short if the slenderness
ratio is less than 12
Short columns have less buckling tendency but
high crushing tendency so, Short column
quickly fail due to crushing.
The load-bearing capacity of short columns is
more.
The short column has more gyration radius
Short column, can be designed to resist
compressive loads more directly, without
needing to consider buckling.
Short column is stronger than long column
and is highly preferred.
12. Define hook's law. What are limitations of hook's law? (5 marks) [PSC, Karnali, 5th level, 2079]
Answer:
In the mechanics of structures, Hook's law describes the relationship between the stress and strain of an
elastic material. It states that the stress applied to a material is directly proportional to its strain, as long as
the material remains within its elastic limit. The elastic limit is the point beyond which the material becomes
permanently deformed and no longer returns to its original shape when the stress is removed.
Mathematically, Hook's law in the mechanics of structures can be expressed as: σ = Eε
Where, 'σ' is the stress applied to the material
'E' is the modulus of elasticity of the material
And 'ε' is the strain or deformation of the material.
While Hook's law is a useful and widely applicable principle, there are certain limitations to its application in
some scenarios.
Here are some of the limitations of Hook's law:
a. Applicable within Elastic Limit only: A limitation to Hooke's Law is that, it only applicable
under the elastic limit of any material, which means that a material should be perfectly elastic
to obey Hooke's Law. Once the elastic limit of a material is exceeded, the material may not
obey Hook's law and may deform in a non-linear or even plastic way.
72.
b. Assumption of constant modulus of elasticity with Temperature and Time: Hook's law is
only valid for materials that have a constant modulus of elasticity. However, the modulus of
elasticity can change with temperature, time, and other factors. Therefore, Hook's law may
not be applicable to materials that exhibit time-dependent or temperature-dependent
behavior.
c. Not directly applicable to materials with Non-uniform deformation: Hook's law may not be
directly applicable to materials with non-uniform deformation (such as plate subjected to
bending) and more advanced models are needed for analysis of behavior of such materials.
d. Not applicable to anisotropic materials: Hook's law assumes isotropic materials that exhibit
the same properties in all directions. Thus, it may not be applicable to anisotropic materials
(such as wood or composite materials) which exhibit different properties in different
directions.
e. Fail to accurately predict behavior of material subjected to Large Deformations: Hook's law
is limited to small deformations. For large deformations, more complex models are needed to
accurately predict the behavior of the material.
13. Draw the shear force and bending moment diagrams for a simply supported beam of length 'L' carrying
uniformly distributed load 'w' per unit length which occurs across the whole beam.
5 marks.
[PSC, 5th level 2079]
Answer:
According to question we have a simply supported beam of length 'L' carrying UDL of 'w' per unit length
across full span as shown below:
Let R1 and R2 be the reactions at support A and B respectively then,
R1 = R2 = wL/2
SF at A = Ra = + wL/2 = VA
SF at B = Rb = - wL/2 = VB
SF at center point = Ra - wL/2 = 0
BM at A and B = 0 (being simple support)
BM at center point (BMmax) = Ra * L/2 – (wL/2)*(L/4) = wL2 / 8
73.
14. Calculate the shear force and bending moment of a simply supported beam of span 'L'=4 m and
carrying uniformly distributed load (UDL) 5 kN/m. Sketch shear force and bending moment diagram with
calculated values.
10 marks.
[PSC, Bagmati, 5th level 2079]
Answer:
According to question we have a simply supported beam of span '4 m' carrying UDL of '5 kN/m across full
span as shown below:
Here, L = 4 m and w = 5 kN/m
Then,
RA = RB =
74.
wL
2
=
4∗5
2
= 10 kN
SF at A (VA) = Ra = +
SF at B (VB) = Rb = -
wL
2
wL
2
SF at center point = Ra -
= 10 kN
= -10 kN
wL
2
= 10 -10 = 0
BM at A and B = 0 (being simple support)
BM at center point (BMmax) =
wL2
8
=
5∗42
8
=10 kNm
15. What is Shear Force and Bending Moment, discuss its relationship.
5 marks
[PSC, Bagmati, 5th level 2079]
75.
Answer:
Shear Force:
Shear force is the force acting tangential to the cross-section of the member.
Shear force refers to the force that is perpendicular to the longitudinal axis of a structural
element, such as a beam, and is applied at a given point.
Shear force is the result of the distribution of loads across a structure and is responsible for
causing a structure to deform.
Shear force at a section is defined as the algebraic sum of transverse force acting to
either side of the section.
The direction of shear force is perpendicular to the Centroidal axis of the member
.
Positive shear force
Negative shear force
Bending Moment:
Bending moment of a section is defined as the sum of algebraic sum of moment of externals
loads acting to their either sides of section.
Bending moment refers to the internal moment that is generated within a structural element as
a result of external loads. This moment is responsible for causing the beam to bend, and it is
important to consider bending moment in the design of any structural element to ensure that it
can withstand the expected loads.
The diagram showing the variation of bending moment along the span is called Bending
moment Diagram (BMD).
To show the relationship between shear force and bending moment; let us consider a simply supported beam of length
'L' subjected to a uniformly distributed load 'w' per unit length over its entire length as shown in figure below:
76.
Figure: simply supported beam subjected to UDL
Here, R1 = R2 =
𝑤𝐿
2
Figure: Shear force and moment at section 'C'
Let Vx be the shear force at a distance 'x' from the left support and Mx be the bending moment at the same
point.
The beam is in a state of static equilibrium, and therefore the sum of all forces and moments acting on the
beam must be zero.
Therefore, Shear force at point C (at distance x from left support) is given as;
Vx = (ΣFy)Left = R1 - wx
or,
𝑤𝐿
Vx = 2
{since, R1 =
- wx
𝑤𝐿
2
}
…………………………..(1)
Similarly, the moment at C is given as;
MX = (ΣMC) =
𝑤𝐿
𝑤𝐿
2
or, MX = 2 x - w
𝑥
x− wx.(2)
𝑥2
2
……………………………………..(2)
If we differentiate equation (2) with respect to x, we get;
𝑑𝑀𝑥
𝑑𝑥
=
𝑤𝐿
2
– wx
………………………………………….(3)
77.
From equation (1) and (3), we have;
𝑑𝑀𝑥
𝑑𝑥
Thus,
=
𝑤𝐿
2
– wx = Vx = shear force
𝒅𝑴
𝒅𝒙
= shear force (V) ⇒ the rate of change of the bending moment with respect to x is equal to the
shearing force or the slope of the bending moment diagram at the given point is the shear at that
point.
SOME PROBABLE COMPREHENSIVE QUESTIONS:
1. Define Poisson's ratio. Write down its significance.
Ans: See theory parts.
2. Define moment of inertia with practical example. Write down significance of MOI in civil engineering.
Ans: Moment of inertia is a property of a physical object that describes its resistance to rotational motion. It
depends on the object's mass, shape, and distribution of mass relative to the axis of rotation. The moment of
inertia is represented by the symbol "I" and is measured in units of kg·m² (mass moment of inertia) and m4
(moment of area)
A practical example of moment of inertia is a skater spinning on the ice. When the skater pulls their arms in
close to their body, they decrease their moment of inertia and can spin faster. This is because by bringing
their mass closer to the axis of rotation (their body), they are decreasing the distance between their mass
and the axis, which reduces the resistance to rotational motion. Conversely, when the skater extends their
arms out, they increase their moment of inertia and spin slower. This is because their mass is now farther
away from the axis of rotation, which increases the resistance to rotational motion.
The moment of inertia also plays a role in other situations, such as the motion of a pendulum, the rolling of a
ball down a ramp, and the rotation of a spinning top.
For significance see theory parts.
3. What do you know about Radius of Gyration? Describe briefly.
Ans: See theory parts.
78.
4. Does roller support or pin support always allow rotation? Explain this statement with proper example.
Ans: The answer is no. It is not necessary that the pin or roller support always allow rotation. The roller or
pin support allow rotation when they act as simple support, but if they act as an intermediate support (like
in continuous beam) then they will resist the rotation. It is because they act as fixed support in such case.
This statement can be well explained by taking example of simply supported beam and a continuous beam
as shown below:
For simply supported beam:
Figure: simply supported beam allowing rotation
From above diagram, we can see for roller or pin support acting as simply support beam, the moment at the
support is zero and rotation value at support is not zero. This implies that for simply support beam roller or
pin support allow rotation and does not give moment.
But for continuous beam:
Figure: continuous beam with pin support acting as intermediate support
79.
Figure: BMD
Figure: deflection shape
From above BMD for continuous beam, it is clearly seen that the intermediate pin support produced hogging
Bending moment (-Mb). This implies the when pin or roller support acts as the intermediate support it will
resist the rotation & deflection and produce moment value i.e they acts like fixed support.
Thus, if someone ask does roller support or pin support always allow rotation, answer will be no not at all. It
is not necessary that the pin or roller support always allow rotation.
5. Prove that E = Ошибка!, using relation between E & K and E & G. (where, E = modulus of elasticity, G =
modulus of rigidity and K = bulk modulus of material)
Ans: We have, the relation between E and G is given as;
E = 2G (1 + )
Or,
= (E/2G – 1) ……….. (1)
Where, = Poisson's ratio
Again, the relation between E and K is given as;
E = 3K (1 – 2)……….. (2)
Putting value of from equation (1) to equation (2), we get;
E = 3K [1 – 2*(E/2G – 1)]
or, E = 3K [3 – E/G ]
or, EG + 3KE = 9KG
∴ E = Ошибка!
6. Write down assumptions of Euler's crippling load theory/Euler's column buckling theory.
80.
Ans: Euler's theory of column buckling is a classical theory used to predict the buckling load of a long,
slender column under an axial compressive load.
The following are the assumptions of Euler's buckling theory:
The column is perfectly straight and has a uniform cross-section throughout its length.
The column is composed of an isotropic and homogeneous material that has a constant Young's
modulus and a Poisson's ratio.
The column is supported at both ends and is free to rotate at the supports, but there is no lateral
deflection of the column at any point along its length.
The column is subjected to an axial compressive load that is applied through its centroid and is
perfectly aligned with the longitudinal axis of the column.
The column's length is much greater than its cross-sectional dimensions, which means that the
column is long and slender.
The buckling mode of the column is assumed to be an idealized shape, such as a half-wave or
quarter-wave, depending on the boundary conditions and the type of loading.
The material of the column is assumed to be perfectly elastic and obeys Hooke's law throughout the
deformation process.
There are no initial imperfections or eccentricities in the column that might cause it to buckle
prematurely.
7. Draw typical sample of SFD and BMD for a cantilever beam carrying UDL throughout the span. (Assume
any data necessary)
Ans: The typical sample of SFD and BMD for a cantilever beam carrying UDL throughout the span is shown
below;
8. Write down the equation of equilibrium for rigid body.
Ans: The equation of equilibrium for a rigid body relates the external forces and torques acting on the body
to the body's motion. The equation of equilibrium is given by :
81.
∑F = 0 and ∑M = 0
i.e.,
Fx = 0
Fy = 0
M =0
for 2D objects
and
Fx = 0
Fy = 0
Fz = 0
Mxy = 0
Myz = 0
Mxz = 0
for 3D objects
Where,
∑F = the vector sum of all the external forces acting on the body.
This equation states that the total force acting on the body must be equal to zero for the body to be in a state of
static equilibrium. In other words, the body is not accelerating and is either at rest or moving at a constant
velocity.
and
∑M = the vector sum of all the moments acting on the body i.e., the body is not rotating and is either at rest
or rotating at a constant angular velocity.
9. Define ultimate strength and working stress of materials?
Ans:
Ultimate strength: it refers to the maximum stress that a material can withstand before it fails or
fractures. This is typically determined through laboratory testing, where the material is subjected to
increasing levels of stress until it breaks. Ultimate strength is the maximum stress that a material can
withstand before it fails
Working stress: it refers to the maximum amount of stress that a material can withstand without
experiencing permanent deformation or failure in normal working conditions. Working stress is
often calculated as a percentage of the material's ultimate strength, and is used as a design
parameter to ensure that the material is not subjected to stress levels that could cause it to fail
prematurely. The working stress is often calculated as a percentage of the material's yield strength,
which is the point at which the material begins to exhibit plastic deformation. The working stress
may also be limited by other factors such as buckling, fatigue, and creep, which can cause the
material to fail over time under repeated loading.
10. What do you understand the term structure? Explain with practical examples. Write down the
functions of beam structure.
82.
Ans: In engineering, the term "structure" refers to a system or arrangement of parts that are designed to
support loads and resist external forces. Structures are typically composed of various structural elements,
such as beams, columns, and trusses, that work together to distribute loads and provide stability.
Here are some practical examples of structures:
Bridges: Bridges are structures that are designed to span a gap or obstacle, such as a river or a
roadway. They typically consist of a deck, which is supported by beams or trusses, and piers or
abutments, which support the weight of the bridge and transfer it to the ground.
Buildings: Buildings are structures that are designed to provide shelter and support for people and
other loads. They typically consist of a foundation, which supports the weight of the building and
transfers it to the ground, and a superstructure, which is composed of various elements such as
columns, beams, and walls that provide the necessary support and stability.
Towers: Towers are tall structures that are designed to support various types of equipment, such as
antennas or wind turbines. They typically consist of a slender shaft, which is supported by a
foundation, and various structural elements, such as braces and cross members, that provide
stability and resistance to wind and other external forces.
The function of a beam structure is to support loads and distribute them evenly across the structure. Beams
are typically used in structures such as buildings and bridges to provide support for the floors or decks
above.
The main functions of a beam structure are:
To support the weight of the structure and any loads placed on it.
To distribute the loads evenly across the structure to prevent localized stress concentrations.
To resist bending and twisting forces that can cause the structure to deform or fail.
To provide stability and rigidity to the structure, particularly against lateral forces such as wind or
earthquakes.
By fulfilling these functions, beam structures ensure that a structure remains stable and safe, even under the
most demanding loads and external forces.
THE END
83.