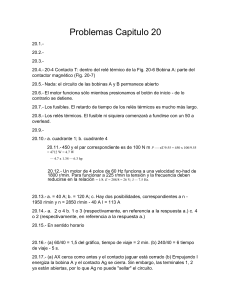
UNIVERSIDAD NACIONAL DE INGENIERIA FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA ESCUELA DE POST GRADO PROTECCIÓN DE SISTEMAS ELECTRICOS DE POTENCIA Prof. F. F. Gamarra E. National University of Engineering Post Graduated School Electrical and Electronics Department P.O.B. 1301 Lima 1, Lima, Peru Introducción Los sistemas eléctricos de potencia están conformados por generadores, transformadores, líneas de transmisión, equipos de compensación reactiva (banco de condensadores, banco de reactores y FACTS). Cada uno de estos componentes requieren de otros elementos que constituyen los Sistemas de Protección. En este nuevo modelo económico competitivo se observa una mayor preocupación en la seguridad de los sistemas de potencia versus márgenes de estabilidad, calidad de servicio (o calidad de la energía) y mínimos costos de operación. En tal sentido el cálculo de la confiabilidad de los sistemas de potencia resulta necesario. Los componentes de los sistemas de potencia están sometidos a variaciones de tensión y corriente. Cuando las magnitudes de la tensión o la corriente se encuentran en rangos muy superiores a la magnitud nominal de los componentes del sistema, estos son inhabilitados sufriendo daños irreversibles. En el caso de grandes magnitudes de corriente el aislamiento es sometido a un calentamiento debido al efecto Joule y puede sobrepasar la temperatura limite del aislamiento provocando un envejecimiento prematuro del aislamiento. Asimismo cuando el componente es sometido a grandes magnitudes de tensión, la característica de la rigidez dieléctrica del aislamiento es deteriorada. Los componentes de los sistemas de potencia están sujetos a ocurrencias de innumerables tipos de fallas. Las fallas mas comunes en los sistemas de potencia son aquellas ocurridas en las líneas de transmisión en forma de cortocircuitos. Los cortocircuitos son caracterizados por elevadas magnitudes de corrientes. Los cortocircuitos no solo producen efectos nocivos del tipo electromecánico y térmico, produce también un efecto negativo en la estabilidad del sistema eléctrico por que disminuye la magnitud de la tensión y el flujo de potencia activa en la línea. Capítulo I: 1. 2. 3. Conceptos Generales Relés Electromecánicos Teoría de las Componentes Simétricas. Fallas en Sistemas de Potencia. Apertura de Fallas y Extinción de Arco. “It has been recognized by most relay designers – and is also the belief of the authors – that the principles of protection have essentially remained as established by experience gained over the last century. Computer relays provide essentially the same capabilities as traditional relays in a more efficient manner” . Computer Relaying for Power Systems, Second Edition, 2009 Arun G. Phadke, James S. Thorp, Virginia Tech, Blacksburg, Virginia USA. Conceptos Generales DEFINICION DE RELE Es la unidad fundamental sobre la cual los sistemas de protección están diseñados y cuya función consiste en medir y comparar las magnitudes eléctricas del circuito o equipo a ser protegido. Utilizando los resultados de medición y comparación toman la decisión de ejecutar una orden o permanecer inactivo sin accionar ninguna orden. FUNCIONES DE LOS SISTEMAS DE PROTECCION 1. 2. 3. Desconexión automática del elemento con falla. Localizar el lugar de falla. Diagnosticar el tipo de falla. Transformadores de Corriente: Definición y Características Un transformador de corriente es un dispositivo electromagnético constituido por dos bobinas que se encuentran acopladas magnéticamente mediante un núcleo ferromagnético. La bobina primaria se encuentra en serie con la línea de transmisión en donde se desea medir la corriente. En la bobina secundaria se encuentra instalado los instrumentos de medición y protección que necesitan corriente. Su modelo matemático o ecuaciones que determinan su comportamiento es similar a los transformadores de potencia. Su objetivo principal consiste en transformar grandes magnitudes de corriente en la bobina primaria a pequeñas magnitudes en la bobina secundaria. Por esta razón el numero de vueltas de la bobina del secundario en mucho mayor con relación al bobina primaria. La sección del conductor de la bobina primaria es mucho mayor que la sección del conductor de la bobina secundaria. La corriente en la bobina secundaria debe tener la misma característica fasorial de la corriente del lado primario. La relación de la corriente del primario y el secundario debe ser lineal. Estas condiciones son ideales sin embargo se logra con un determinado margen de error. El transformador de corriente separa eléctricamente el circuito de alta tensión del circuito de baja tensión. El transformador de corriente debe suministrar magnitudes adecuadas de corriente a los relés. Transformadores de Tensión: Definición y Características Un transformador de tensión es un dispositivo electromagnético constituido por dos bobinas que se encuentran acopladas magnéticamente mediante un núcleo ferromagnético. La bobina primaria se encuentra instalado en paralelo con los terminales de tensión en la cual de desea medir la magnitud de tensión. La bobina secundaria es diseñada para disminuir la tensión primaria y donde deberá reflejarse la tensión del primario con el mínimo error, en esta bobina se instalan los instrumentos de medición, control y protección. Su modelo matemático o ecuaciones que determinan su comportamiento es similar a los transformadores de potencia. Su objetivo principal consiste en transformar grandes magnitudes de tensión en la bobina primaria a pequeñas magnitudes de tensión en la bobina secundaria. Por esta razón el numero de vueltas de la bobina del primario es mucho mayor con relación al bobina secundaria. La tensión en la bobina secundaria debe tener la misma característica fasorial de la tensión del lado primario. La relación de la tensión del primario y el secundario debe ser lineal. Estas condiciones son ideales sin embargo se logra con un determinado margen de error. El transformador de tensión debe suministrar magnitudes adecuadas de tensión a los relés. En las redes eléctricas cuya tensión supera los 69 kV normalmente se utilizan un elemento auxiliar denominado Divisor de Tensión Capacitivo con el objetivo de disminuir la magnitud de tensión a ser medido, conectándose el transformador de tensión en el ultimo tramo. Característica de la Corriente de Excitación en Estructuras Ferromagnéticas i + vt max ip im V Eficaz i vt 2VEficaz cost i VEficaz 2 f N max Corriente de Corto Circuito en el Secundario Efecto de la Corriente de Corto Circuito max i1 i2 i La corriente de corto circuito hace sobrepasar la zona lineal del núcleo consecuentemente produciendo un alto contenido de armónicos en la corriente secundaria del transformador de corriente. Relés Electromecánicos Segundos Relé de Embolo o Pistón I2 I1 t3 t2 t1 1.0 5.0 Times Pickup: Amperios Relé de Inducción: Una Sola Fuente de Excitación I1 B1 B2 i p1 F1 ip2 F2 Fuerzas Entre Circuitos por donde Circulan Corrientes Parasitas F1 li x B1 F1 B1 li p1 B1 F1 F2 i p1 ip2 B2 Relé de Inducción: Dos Fuentes de Excitación Vab Va Vbc Vc Vca Vb Bobina de Corriente: Van Bobina de Tensión: Vbc Relé Direccional Bobina de Corriente en Falla Van i1 i2 Ia Bobina de Tensión: Vbc I Pola RL , XL Bobina de Corriente: Van TC V=0 Conexión de Bobinas de Corriente y Tensión Principio de Operación del Relé Direccional: I Vab Van Vac 90 Vbc Van VOpe /2 I Pola Ope Ia Vbc VPola : Ángulo del relé : Ángulo de I a 90 Pola Vef 2 f N max Vef K max Vbn Vca Bobina de Corriente: Van / 2 Vcn Ia Bobina de Tensión: Vbc I Pola Principio de Operación del Relé Direccional: II Ecuación de Torque Relé K1OpePola sin Relé K 2 I aVbc sin 90 Relé K 2 I aVbc cos Van r : torque restaurador neto Relé r Ia Vbc I Pola I Pola Pola Ope neto K 2 I aVbc cos r Bobina de Corriente: Van Ia Ia Bobina de Tensión: Vbc I Pola Concepto Fundamental de Direccionalidad Ecuación de Torque Relé K 1OpePola sin Van I a min Ia Ope Pola Vbc Relé K 2 I aVbc sin 90 Relé K 2 I aVbc cos r torque restaurador neto Relé r si neto 0 I a I a min 0 K 2Vbc I a cos r r I a cos K 2Vbc K I amin I a cos Relé Diferencial Protección Diferencial Equipo Protegido Relé Aplicaciones Principio de Funcionamiento El principio de funcionamiento de la protección diferencial es esencialmente muy simple y se fundamenta en la primera ley de Kirchhoff. La corriente que entra y la corriente que sale en el equipo protegido son comparados utilizando transformadores de corriente. Protección de transformador de potencia. Protección de líneas subterráneas. Protección de maquinas síncronas. Protección de barras. Protección de líneas de transmisión cortas. Protección Diferencial Ideal: Sin Falla I ip I op Equipo Protegido I is I os Protección Diferencial Ideal: Con Falla Interna I ip I op Equipo Protegido I is I os I R I is I os Protección Diferencial Ideal: Con Falla Interna I ip I op Equipo Protegido I is I os I R I is I os Protección Diferencial Ideal: Con Falla Externa I ip I op Equipo Protegido I is I os IR 0 Relés de Distancia 1. 2. 3. Relé de Impedancia. Relé de Admitancia o Mho. Relé de Reactancia. Principio de Funcionamiento del Relé de Impedancia r Bobina de Tensión Torque Restaurador Total oper Ia Resorte Restaurador, Km Va Ecuación de Torque oper K I 2 1 a r : torque restaurador r K 2V K m neto oper r 2 neto K1 I a2 K 2V 2 K m Relé r Torque de Operación Bobina de Operación neto K1 I a2 K 2V 2 K m Si neto 0 0 K1 I a2 K 2V 2 K m 2 2 a Dividiendo entre K I K1 I a2 K 2V 2 Km 0 2 2 K 2 I a K 2 I a K 2 I a2 Circuito de Disparo 2 rm Si KK22IIa2a K K1 V 2 0 2 0 K2 Ia 2 V K1 K2 Ia Z 2 R2 X 2 Concepto Fundamental de Operación del Relé de Impedancia 75-80 % LT Dentro de la región de operación el relé siempre mide una impedancia menor que aquella que origina la mínima corriente de operación. LT 2 jX REGIÓN DE OPERACIÓN LT 1 R 2 V K1 K2 Ia Z 2 R2 X 2 Z R2 X 2 Relé de Impedancia con Restricción de la Dirección de Corriente 75-80 % LT REGIÓN DE OPERACIÓN LT 2 jX REGIÓN DE OPERACIÓN Región de Operación R LT 1 Principio de Funcionamiento del Relé de Admitancia: Mho Ecuación del Torque Vab Va Vrest Vbc Si : neto 0 0 K 2 I aVbc cos K1Vbc2 K 2 I aVbc cos K1Vbc2 0 2 K 2Vbc K 2Vbc2 0 Ia K cos 1 Vbc K2 K1 1 cos Y cos K2 Z Z 2 K 0 cos r 2 R0 cos Vbc Vb Vc Bobina de Torque de Restricción: Vrest Vca Bobina de Tensión: Vbc Bobina de Corriente: Van neto K 2 I aVbc cos K1Vbc2 Diagrama de Impedancia del Relé Tipo Mho K0 , X REGIÓN DE OPERACIÓN REGIÓN DE OPERACIÓN L2 K0 , L2 R REGIÓN DE OPERACIÓN L1 L1 X No Opera Principio de Funcionamiento del Relé de Reactancia K1 Si Opera K2 R Ecuación de Torque oper K I 2 1 a r : torque restaurador r K 2Vab I a sin K m neto oper r neto K1 I a2 K 2Vab I a sin K m neto K I K 2Vab I a sin K m 2 1 a neto 0, 0 K1 I a2 K 2Vab I a sin K m Dividiendo entre K 2 I a2 K1 I a2 K 2Vab I a sin K m 0 2 2 K2 Ia K2 Ia K 2 I a2 Si K 2 I a2 Km K1 Vab sin 0 0 K2 Ia Vab K sin 1 Z sin Ia K2 X K1 K2 Esquema de Protección HMI Conectores de un IED Ferroresonancia Para una determinada frecuencia, el fenómeno de resonancia en circuitos lineales, se presenta cuando las reactancias inductivas y capacitivas resultan exactamente iguales en módulo y se asumen tanto las reactancias inductivas así como la inductancias capacitivas de comportamiento lineal. El fenómeno de ferroresonancia es similar a la resonancia en circuitos lineales, con la diferencia que en este caso las inductancias son saturables por tener núcleo de acero laminado, la característica de saturación puede aproximarse por dos tramos lineales limitados por el denominado codo de saturación. En este modelo aproximado cada tramo tiene una inductancia característica. El primer tramo se caracteriza por tener una alta inductancia y el segundo tramo por tener la inductancia saturada y mucho menor en relación al primer tramo. Utilizando este modelo se puede determinar el comportamiento de las corrientes y tensiones. La ferroresonancia constituye un fenómeno no lineal por la característica de saturación del acero, por tanto las corrientes no tienen característica sinusoidal y poseen componentes armónicas. VEficaz 2 f N max , L VEficaz N i Codo iCodo I v (t ) IL IL IC Ferroresonancia: Variación de Xc Xc: Recta del Condensador VEficaz Xc: Recta del Condensador: FERRORESONANCIA tg LNo Saturado tg LSaturado tg 1 C Xc: Recta del Condensador I IL IC xL xC IL N El Fenómeno de Ferroreson ancia se da VEficaz 2 f N max , L i cuando : X L No Saturado X C X L Saturado. Nota : El Fenómeno de ferroreson ancia Las magnitudes de las reactancias dependen de las tangentes de los se puede dar cuando al mismo instante varia tanto la tensión así como la ángulos , y . frecuencia, esto es para, f 60 o f 60. Protección Digital de Distancia 1. 2. Conceptos Fundamentales. Teleprotección. Conceptos Fundamentales 1. El objetivo de la protección de distancia consiste en calcular la impedancia en el punto donde se encuentra localizado el relé, mediante la medición de la tensión y la corriente. 2. La impedancia calculada es comparada con la impedancia conocida de la línea de transmisión. Si esta impedancia calculada es menor que la impedancia de referencia de la línea (set line impedance) entonces se trata de una falla dentro de la línea y un comando de disparo es activado para la desconexión de la línea. 3. La resistencia de falla puede variar hasta en un mismo punto de falla. En tal sentido no se recomienda considerar como alcance máximo de distancia el 100 % de la impedancia de la línea. Se recomienda dejar un margen entre 10-15 % en los extremos de la línea (este porcentaje de línea faltante es cubierto por un sobre-alcance de segunda zona). X 21 ZLF2 RF RF F1 ZCarga F2 Area de Falla ZL ZLF2 ZLF1 RF ZCarga Area de Carga ZLF1 Carga CC1 CC 2 Area de Protección R Teleprotección Segunda Zona A Primera Zona A A B Corriente de Arco Primario Primera Zona B Segunda Zona B 10-15 % 70-80 % 10-15 % El relé RA informa al relé RB que la falla se encuentra en la Línea AB A RA B RB Segunda Zona A Primera Zona A A B Primera Zona B Segunda Zona B 10-15 % 70-80 % 10-15 % El relé RB de la barra B ordena la apertura del interruptor de la barra B. B A RA RB Corriente de Arco Secundario Segunda Zona A Primera Zona A A B Corriente de Arco Primario Primera Zona B Segunda Zona B 70-80 % 10-15 % 10-15 % Sistema de Comunicación S 21 Protección de Distancia R Dispositivo de Señal de Transmisión Canal de Señal Analógica o Digital •Conductor •Onda Portadora •Microondas •Fibra Óptica S 21 R Dispositivo de Señal de Transmisión Protección de Distancia Tiempos de Operación RELE ENVIO RECEPCION RELE Evaluación Procesa- Selección Ruido Operación del Tipo de miento Decision Falla de Señal de Señal 10-60 ms 1-5 ms 6-40 ms 0-20 0-10 ms INTERRUPTOR Operación Desionización del Arco 30-40 ms 10-20 ms Tiempo de Propagación de la Señal de Comunicación = 0 Sistemas de Teleprotección 1. 2. 3. 4. 5. Transferencia de Disparo Directo por Subalcance (Direct Underreaching Transfer Trip: DUTT) Transferencia de Disparo Permisivo por Subalcance (Permissive Underreaching Transfer Trip: PUTT) Transferencia de Disparo por Subalcance (Permissive Overreaching Transfer Trip: POTT) Bloqueo por Comparación Direccional (Directional Comparison Blocking: DCB) Desbloqueo por Comparación Direccional (Directional Comparison Unblocking: DCU) Influencia de la Oscilación de la Potencia y Pérdida de Paso en Relés de Distancia: RA B A RA RB EA EB Pe Pe t t Influencia de la Oscilación de la Potencia y Pérdida de Paso en Relés de Distancia RA A RA M mZ m0 1 mZ B RB m1 E EA EB E A / EB / 0 I Z E E A / m E A / E B / 0 Ejemplo : m 0.5 E 1 m E A / mEB Zr E 1 m E A / mEB ZL I E A / EB E A EB EA Si : E A EB Z r 1 m / m ZL / 1 Zr 1 1 m j cot ZL 2 2 2 m E A E B EA E E E M EA 1800 , E 0 E A EB EB Pe ( , t ) E A EB sin (t ), Z L jX L XL min q max d m (t ) R 0 + Ifd - (t ) Efd sinc m fd m0t + S q ,kq d ,kd Pe ( , t ) t Xr 300 180 0 0 m=0.00 m=0.25 m=0.50 m=0.75 m=1.00 330 0 1 j cot 2 2 Zr 1 1 m j cot Z 2 2 2 Rr 1 m 2 Ejemplo : m 0.5 60 0 E A EB EA EA 30 0 m E A E B EA 1800 , E 0 E E E M E A EB EB Lugar Geométrico de Xr y Rr : EA= EB B A RA m 0.25 m 0.5 m0 EA m 0.75 RB m1 EB Xr 1 1 Z r m j cot Z 2 2 2 Rr 330 0 300 0 180 0 60 0 30 0 Lugar Geométrico de Xr y Rr =0: EA= EB Xr 1 1 Z r m j cot Z 2 2 2 m=0.00 m=0.25 900 Rr m=0.50 m=0.75 m=1.00 330 0 300 0 180 0 60 0 30 0 E A / EB ZL E E A / m E A / E B I E 1 m E A / mEB Zr E 1 m E A / mEB ZL I E A / EB E A KEB y m 0 Zr E EA / ZL I E A / EB Zr E KEB / ZL I KEB / EB E K / ZL I K / 1 Ke j Zr ZL Ke j 1 1 Z L Zr j e 1 K Zr Z r Z L cosθ jsinθ cos 1 K 1 sin j K 1 cos j sin K K Z r Z L cosθ jsinθ 2 2 cos sin 1 K K cosθ cos j sen sin K K Z r ZL 2 1 1 2 cos 1 K K 2 1 1 2 cos 1 K K cos sin cosθ j sen K K Z Z cos Z Z sin R L cosθ L , X L sen L K K Zr ZL ZL Z cos cosθ L K Z L cos Z L cosθ R K De la componente imaginaria : R 2 2 2 2 2 2 Z Z 2 X L sen L sin K Z Z 2 X L sen L 1 cos K ZL ZL ZL X sen cos K K Reemplazan do en la última ecuación : 2 2 ZL ZL ZL X sen cosθ R K 2 2 Z Z Z X L sen R L cosθ L K 2 1 1 2 cos 1 K K 2 2 2 Centro Eléctrico: EA= EB XGen +XTraf A XLínea B EB EA Pérdida de Sincronismo 1. Se define operación en estado estable del generador síncrono, al estado en el cual, la velocidad del campo magnético producido por las corrientes del devanado del estator gira con la misma velocidad del campo magnético producido por la corriente de excitación del rotor, medidas en el eje de referencia ubicado en el estator. En el entrehierro existe un campo magnético giratorio resultante y gira a la velocidad síncrona para una referencia ubicada en el estator. 2. Los rotores de los generadores síncronos que se encuentran interconectados en un sistema de potencia giran con sus propias velocidades síncronas y se encuentran acoplados magnéticamente con la red eléctrica mediante fuerzas elásticas producidas por las líneas de flujo magnético resultante. Como consecuencia de una perturbación, estas fuerzas elásticas producen sobre el rotor un desplazamiento angular variable en el tiempo en relación a los otros rotores del sistema. 3. La pérdida de sincronismo ocurre cuando la fuerza de acoplamiento resulta insuficiente a la acción de una perturbación para mantener al rotor en su velocidad síncrona. Fuerzas Elásticas entre el Estator y Rotor: Líneas de Flujo Magnético Tm Te Agua Las líneas de flujo son perpendiculares a las caras polares cuando la carga del generador es muy pequeña. A la medida que aumenta la potencia activa generada las líneas de flujo dejan de ser perpendiculares a las caras polares. Líneas de Transmisión con Compensación Serie 1. Mediante la técnica de compensación serie se logra aumentar la capacidad de transmisión de las LT expresados en megavatios y se mejora el comportamiento del sistema en relación a su estabilidad angular así como su estabilidad de tensión aumentando el margen de colapso de tensión. 2. El costo de los proyectos de LT con compensación serie normalmente resultan mas económicos por la disminución de la cantidad de ternas en paralelo. 3. La compensación serie aumenta la magnitud de la corriente de corto circuito y asimismo puede ocasionar resonancia con frecuencias inferiores a la frecuencia nominal del sistema, denominada resonancia subsíncrona. Este fenómeno debe ser estudiado en forma detalla cuando la LT se encuentra unida a una central térmica o a gas. 4. La reactancia capacitiva XC del banco de capacitores se encuentra en el rango de 25 - 75 % de la reactancia de la LT (XL ). 5. Los bancos de capacitores pueden ser instalados en un extremo, en ambos extremos o en la mitad de la LT. Los bancos instalados al final de la LT crean problemas complejos de protección comparados con aquellos ubicados en la mitad. 6. Los bancos de capacitores requieren de un circuito de protección conformado por MOVs (Metal Oxide Varistors) o chispero (Spark Gaps) para reducir o eliminar sobretensiones en los capacitores . Sistema 1 Barra 1 VS Sistema 2 VR Barra 2 Banco de Capacitores 1. 2. C D 3. G: Spark Gap S 4. 5. C D 1. R G S 2. C: Banco de capacitores. D: Bobina de amortiguamiento, limita la corriente de descarga del capacitor y absorbe la energía del capacitor. G: Chispero o Descargador, es un desvío para la corriente de falla (bypass), se activa cuando la tensión en el capacitor sobrepasa la magnitud definida (3Vn o 4Vn de C). S: Interruptor, una vez detectado la corriente en G se cierra. Cuando la corriente de la línea retorna al valor normal este interruptor se abre. Este sistema es diseñado para retornar a la operación normal de C dentro de 200 o 400 ms. R: Resistencia de comportamiento no lineal (ZnO), limita la tensión en el banco de capacitores durante la falla y reinserta al banco de capacitores automáticamente luego de la eliminación de la falla. La energía del banco es absorbida por esta resistencia sin la necesidad de activar el chispero G. R y C permanecen conectados durante la falla, R funciona como un bypass dejando pasar la mayor cantidad de corriente de falla. G: Chispero, en este caso funciona solo como una protección de respaldo de R. Efectos de la Inversión de la Tensión I: Discriminación Direccional mXL XS A B XC > mXL XC < XS + mXL V V´ I CC EB EA V´ V jX C I CC V ´ j (mX L ) I CC j (mX L X C ) I CC V I CC EA Efectos de la Inversión de la Tensión II: Discriminación Direccional mX´L XL+XR A B I CC XC > mX´L V V´ XC < XL + XR + mX´L EB EA V V´ jX C I CC V j (mX´L ) I j (mX ´L X C ) I V ´ I CC EA Relés Digitales Multifunción Hasta el inicio de la década de los ochenta los sistemas eléctricos de potencia han estado utilizado relés electromecánicos, luego fueron sustituidos por relés estáticos (electrónicos) y actualmente se utilizan relés digitales multifunción. El concepto de un relé digital multifunción moderno, ya no se aparece a los antiguos relés electromecánicos. El relé digital multifunción es un sistema sofisticado de control realimentado y posee una tecnología basado en microprocesadores que permite una alta velocidad de procesamiento de datos, decisión y control. VENTAJAS Mas opciones de protección por menores costos. Disminución drástica de la longitud de cableado y volumen de espacio requerido. Mayor flexibilidad. Menor requerimiento de mantenimiento. Capacidad de almacenar datos y registrar eventos tales como las fallas. Adquisición de datos por medio de medidas. Coordinación remota. Capacidad de cambiar las referencias (settings) automáticamente considerando el estado actual del sistema. DESVENTAJAS Una falla en el microprocesador puede deshabilitar varias funciones de protección. Las instrucciones de los manuales son complejas y voluminosas. Excesiva cantidad de datos de entrada requeridos para su ajuste. Arquitectura Básica de los Relés Digitales: Con Entradas de Corrientes y Tensiones Fallas Asimétricas COMPONENTES SIMETRICAS Va1 Va1 Vb 2 Va 2 Vc1 Vb1 Vc 2 Vb1 Vc1 Vc 0 Vc 0 Vb 0 Va1 Va Vb1 Vc1 Va 0 Vb 0 Vc Vb Vc 0 ANALISIS DE FALLAS ASIMETRICAS CON SISTEMA EN VACIO a a b c + + Va Vb + Za + Za Za Zn Vc - - - - + Ia Ib Va 1 1 1 Va 0 V 1 a 2 a V b a1 Vc 1 a a 2 Va 2 Va 0 1 1 1 Va V 1 1 a a 2 V a1 3 b Va 2 1 a 2 a Vc Ic Vc Va Vb + b c Va 0 0 Z0 0 0 I a 0 V V 0 Z 0 I 1 a1 a a1 Va 2 0 0 0 Z 2 I a 2 Va1 Va I a1Z1 Va 2 I a 2 Z 2 Va 0 I a 0 Z 0 REDES DE SECUENCIA T1: X1= X2=0.06 A VA=j1.05 Falla Asimétrica T1 VB=j1.05 T2 B T2: X1=X2=0.10 Generador A: X’d=0.29 Xd=1.05 0.20 0.20 A 0.69 Gran Sistema H=Infinito 0.06 0.10 0.40 Xq=0.69 X’q=0.69 Secuencia Positiva X2=0.18 0.20 Línea de Transmisión 0.18 XL1=XL2=0.4 XL0=0.65 0.20 0.10 0.06 0.40 Secuencia Negativa 0.325 0.325 0.10 0.06 0.650 Secuencia Cero B FALLA MONOFASICA A TIERRA F a - - b c I a1 Va + + Va Vb Vc - - - Va1 + + Zf Ib I c 0 Z1 I a1 + Ia Z2 Ib Ic 0 I a 2 I a1 Va Z f I a Ia0 1 1 1 I a 1 I 1 1 a a 2 0 1 I 1 a1 3 3 a I a 2 1 a 2 a 0 1 I a 3I a 0 3I a1 3I a 2 Va 0 I a 0 Z 0 Va Z f I a 3Z f I a1 Va1 Va I a1Z1 Va Va 0 Va1 Va 2 3Z f I a1 Va 2 I a 2 Z 2 Va 2 + Z0 I a 0 I a1 Va 0 + Va I a 0 I a1 I a 2 Z0 Z1 Z2 3Z f 3Z f I a 0, FALLA BIFASICA ENTRE LINEAS F I b I c , Z f I b Vb Vc a Vb Va 0 a 2Va1 aVa 2 Vc Va 0 aVa1 a 2Va 2 Z f I b Vb Vc (a 2 a )Va1 (a 2 a )Va 2 b c Ia0 1 1 1 0 I 1 1 a a 2 I a1 3 b I a 2 1 a 2 a I b I a 0 0, I a1 I a 2 , Z f (a a) I a1 (a a)Va1 (a a)Va 2 2 2 Z f I a1 Va1 Va 2 Va1 Va I a1Z1 Va 2 I a 2 Z 2 + Va Vb Va1 Va 2 Va I a1Z1 I a 2 Z 2 Z f I a1 Z2 Va1 Ic Ib Ic - Va + Va I a1 I a 2 Z 0 Z1 Z 2 Z f Vc - Zf Ic - - - I b I a 0 a 2 I a1 aI a 2 0 a 2 I a1 aI a1 2 + Ia 0 + Va 2 + Z1 Ia2 + I a1 I a1 I a 2 Zf I a 0 I a 0 I a1 I a 2 I a 0 ( I a1 I a 2 )** Vb ( Z f Z g ) I b Z g I c * , Vb Vc Z f ( I b I c ) Vc ( Z f Z g ) I c Z g I b Vb Vc ( Z f Z g )( I b I c ) Z g ( I b I c )** FALLA BIFASICA A TIERRA F a b c Vb Va 0 a 2Va1 aVa 2 I b I a 0 a 2 I a1 aI a 2 , 2 2 Vc Va 0 aVa1 a Va 2 I c I a 0 aI a1 a I a 2 Vb Vc 2Va 0 (Va1 Va 2 )** **Va1 Z f I a1 I b I c 2 I a 0 ( I a1 I a 2 ) + + Va Vb Ia 0 + Ib Ic Zf Zf Vc - - - Ib I c Zg Va 0 ( Z f 3Z g ) I a 0 Vb Vc (a 2 a)(Va1 Va 2 ) I b I c (a 2 a)( I a1 I a 2 ) (a 2 a)(Va1 Va 2 ) Z f (a 2 a)( I a1 I a 2 )* Va1 Va 2 Z f ( I a1 I a 2 ) VVa1a1 ZZf If aI1a1VVa 2a 2ZZf If aI2a 2 I a1 Z1 Z f Va ( Z 2 Z f )( Z 0 Z f 3Z g ) Z 0 Z 2 2Z f 3Z g - - Va Z2 + Va1 - Va 2 Z 0 Va 0 + Z1 Ia2 + + Zf Ia0 I a1 Zf Z f 3Z g EJEMPLO: FALLA BIFASICA A TIERRA VB=j1.05 A VA=j1.05 T2 T1 B T1: X1= X2=0.06 Gran Sistema H=Infinito T2: X1=X2=0.10 Generador A: Xd=1.05 0.20 0.20 X’d=0.29 A Xq=0.69 0.69 0.06 0.10 0.40 Secuencia Positiva X’q=0.69 X2=0.18 Línea de Transmisión 0.20 0.18 0.10 0.06 0.40 XL1=XL2=0.4 XL0=0.65 0.20 Secuencia Negativa 0.325 0.325 0.10 0.06 0.650 Secuencia Cero B A B 0.20 A 0.69 0.20 0.10 0.06 0.40 Secuencia Positiva 0.20 0.20 0.18 0.10 0.06 0.40 Secuencia Negativa 0.325 0.325 0.06 0.10 0.650 Secuencia Cero B A B A 0.75 0.10 0.05 0.10 0.10 0.05 0.10 0.10 0.0812 0.1625 0.10 Secuencia Positiva 0.24 0.10 Secuencia Negativa 0.06 0.1625 Secuencia Cero B 0.85 A 0.85 A 0.20 0.2225 0.20 0.34 0.2625 0.08125 X2=0.17593 A 0.85 0.14396 0.85 A B 0.05 0.05 0.05 0.20 X0=0.20168 0.20 0.05+0.09396 + j1.05 - - j1.05 + 0.20 A B 0.85 0.20 B 0.05 j0.14396 0.05 0.12593 Z2 Z0 Z FALLA Z0 Z2 0.08125 - j1.05 + - j1.05 + j0.1619 3.4329 0.12043 j0.14396 j0.3059