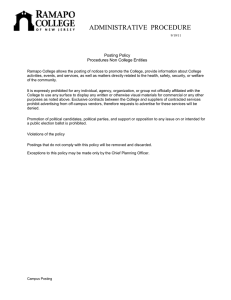
This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual CHAPTER 1 1.1-1. (a) Show that the transfer function of two systems in parallel, as shown in Fig. P1.1-l(a), is equal to the sum of the transfer functions. (b) Show that the transfer function of two systems in series (cascade), as shown in Fig. Pl.1-l(b), is equal to the product of the transfer functions. G1(s) + E(s) C(s) + G2(s) (a) E(s) G1(s) M(s) G2(s) C(s) (b) Fig. P1.1-1 Solution: (a) C(s) = G1 (s) E(s) + G2 (s)E(s) = [G1 (s) + G2 (s)]E(s) ∴ C ( s) = G1 ( s) + G2 ( s) E ( s) (b) C(s) = G2 (s)M (s) = G1 (s)G2 (s) ∴ C ( s) = G1 (s)G2 (s) E ( s) 1.1-2. By writing algebraic equations and eliminating variables, calculate the transfer function for the system of: (a) Figure P1.1-2(a). (b) Figure P1.1-2(b). (c) Figure P1.1-2(c). ( ) R ( s) Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual E(s) R(s) + M(s) Gc(s) C(s) Gp(s) H(s) (a) G2(s) R(s) E(s) + + + G1(s) M(s) G3(s) C(s) H(s) (b) R(s) E(s) + M(s) G1(s) G2(s) C(s) H2(s) + + H1(s) (c) Fig. P1.1-2 Solution: (a) C ( s) = G p ( s) M ( s) = Gc (s)G p (s) E (s) = Gc (s)G p (s)[ R(s) − H (s)C (s)] [1 + Gc ( s)G p ( s) H (s)]C (s ) = Gc (s )G p (s ) R(s ) ∴ (b) Gc ( s )G p ( s ) C ( s) = R ( s ) 1 + Gc ( s )G p ( s ) H ( s) 3 (s) M (s) = G3 (s)[G1 (s)E(s) + G2 (s)R(s)] = G3 (s)G1 (s)[ R(s) − H (s)C(s)] + G2 (s)G3 (s) R(s) [1 + G1 (s)G3 (s) H (s)]C(s) = [G1 (s) + G2 (s)]G3 (s) R(s) ∴ C(s) [G1 (s) + G2 (s)]G3 (s) = R(s) 1 + G1 (s)G3 (s)H (s) (c) C(s) = G2 (s)M (s) = G1 (s)G2 (s) E(s) = G1 (s)G2 (s)[R(s) − H 2 (s)M (s) − H1 (s)C(s)] and M (s) = C(s) G2 (s) ⎡ GG H ⎤ ∴ ⎢1 + 1 2 2 + G1G2 H1 ⎥ C (s) = G1G2 R(s) G 2 ⎣ ⎦ ∴ G1 (s)G2 (s) C(s) = R(s) 1 + G1 (s)H 2 (s) + G1 (s)G2 (s)H1 (s) Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual 1.1-3. Use Mason’s gain formula of Appendix II to verify the results of Problem 1.1-2 for the system of: (a) Figure P1.1-2(a). (b) Figure P1.1-2(b). (c) Figure P1.1-2(c). Solution: (a) Gc ( s )G p ( s ) C ( s) = R( s ) 1 + Gc ( s )G p ( s ) H ( s) (c) G1 (s)G2 (s) C ( s) = R(s) 1 + G1 (s) H 2 (s) + G1 (s)G2 (s) H1 (s) (b) C ( s) G1 (s)G3 (s) + G2 (s)G3 (s) = 1 + G1 (s)G3 (s) H (s) R( s ) 1.1-4. A feedback control system is illustrated in Fig. P1.1-4. The plant transfer function is given by G p ( s) = 5 0.2s + 1 Compensator R(s) + E(s) Gc(s) M(s) Plant Gp(s) C(s) Sensor H(s) Fig. P1.1-4 (a) Write the differential equation of the plant. This equation relates ( ) and ( ) . (b) Modify the equation of part (a) to yield the system differential equation; this equation relates c(t ) and ( ) . The compensator and sensor transfer functions are given by c (s) = 10, H ( s) = 1 (c) Derive the system transfer function from the results of part (b). (d) It is shown in Problem 1.1-2(a) that the closed-loop transfer function of the system of Fig. P1.1-4 is given by C ( s) R ( s) = Gc (s)G p (s) 1 + Gc (s)GP (s) H (s) Use this relationship to verify the results of part (c). (e) Recall that the transfer-function pole term ( ) yields a time constant real. Find the time constants for both the open-loop and closed-loop systems. , where a is Solution: (a) Gp (s) = C (s) 5 25 = = ⇒ (s + 5)C (s) = 25M (s) M (s) 0.2s + 1 s + 5 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual ∴ dc(t ) + 5c(t ) = 25m(t ) dt (b) (c) 5C(s) + 255C(s) = 250R( s) ∴ C ( s) 250 = R( s) s + 255 C(s) (d) = R(s) 25 250 s+5 = 25 s + 255 1 + (10) (1) s+5 (10) (e) open-loop: τ = 0.2s closed-loop: τ = 1 255 = 0.00392s 1.1-5. Repeat Problem 1.1-4 with the transfer functions Gc (s) = 2, G p ( s) = 3s + 8 , s2 + 2s + 2 H ( s) = 1 For part (e), recall that the transfer-function underdamped pole term constant, ( 2 ) + b2 ] yields a time . Solution: (a) G(s) = 3s + 8 C ( s) = 2 M ( s ) s + 2s + 2 ∴ (s 2 + 2s + 2)C(s) = (3s + 8) M (s) !! + 2c(t) ! + 2c(t) = 3m(t) ! + 8m(t) c(t) (b) m(t ) = 2e(t ) = 2[r (t ) − c(t )] (c) (s2 + 8s + 18)C(s) = (6s + 16)R(s) ∴ 6s + 16 C ( s) = 2 R(s) s + 8s + 18 3s + 8 (2) 2 6s + 16 C (s) s + 2s + 2 (d) = = 2 R( s) 1 + (2) 3s + 8 (1) s + 8s + 18 s 2 + 2s + 2 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual (e) open-loop: s2 + 2s + 2 ⇒ s = −1 ± j ε −t cos(t + θ1 ); τ = 1 1 = 1s 1 closed-loop: s2 + 8s + 18 ⇒ s = −4 ± j 2 2 ε −4t cos( 2t + θ2 ); τ = 1 4 = 0.25s 1.1-6. Repeat Problem 1.1-4 with the transfer functions Gc (s) = 2, G p ( s) = 5 , s + 2s + 2 2 H (s) = 3s + 1 Solution: (a) G(s) = 5 C ( s) = ⇒ ( s 2 + 2s + 2)C ( s) = 5M (s) M ( s ) s 2 + 2s + 2 (b) E(s) = R(s) − (3s + 1)C(s) (c) (s2 + 32s + 12)C(s) = 10R(s) ∴ (d) 10 C ( s) = R( s) s 2 + 32s + 12 5 (2) 2 10 C ( s) + 2 s s+2 = = 2 5 R( s) 1 + (2) + s s + 12 32 (3s + 1) 2 s + 2s + 2 (e) open-loop: , from Problem 1.1-5(e) closed-loop: poles = −16 ± 244 = −31.62, − 0.38 ∴τ1 = 1 31.62 = 0.0316s; τ2 = 1 0.38 = 2.63s 1.4-1. The satellite of Section 1.4 is connected in the closed-loop control system shown in Fig. P1.4-1. The torque is directly proportional to the error signal. 5 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual w(t) Thrusters Thrusters (a) Amplifiers and thrusters ®c(s) + - E(s) Error Satellite T(s) Torque K 1 Js2 ®(s) Sensor H(s) = 1 (b) Fig. P1.4-1 (a) Derive the transfer function c (s) , where θ (t ) −1 = L ⎡⎢⎣Θ(s)⎤⎥⎦ is the commanded attitude angle. (b) The state equations for the satellite are derived in Section 1.4. Modify these equations to model the closed-loop system of Fig. P1.4-1. Solution: (a) Θ(s) = ⎡ ⎢ ⎣ ∴ 1 K K T ( s) = 2 E ( s) = 2 [Θc ( s) − Θ( s)] 2 Js Js Js 2 ⎤ K ⎥ Θ(s) = 2 Θ c (s) Js ⎦ K Js 2 K J Θ( s ) = = 2 K Θc ( s ) 1 + s +K J Js 2 (b) 1 2 = 0; (1 − 5): x2 = θ! = x!1 !! = (t) = θ(t) = 1 K K τ(t) = e(t) = [θc (t) − θ(t)] J J J K [θc (t ) − x1 (t )] J 6 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual ⎡ (t) ⎢ 1 ⎢ x!2 (t) ⎣ ⎤ ⎡ ⎥=⎢ 0 ⎥ ⎢⎣ K J ⎦ ⎡ 1 ⎤ ⎢ x1 (t) ⎥ 0 ⎥⎦ ⎢ x2 (t) ⎣ ⎤ ⎡ ⎤ ⎥ + ⎢ 0 ⎥" c (t) ⎥ ⎢⎣ K J ⎥⎦ ⎦ y(t ) = [1 0]x(t ) 1.4-2. (a) In the system of Problem 1.4-1, J = 0.4 and K = 14.4, in appropriate units. The attitude of the satellite is initially at 0°. At t = 0, the attitude is commanded to 20°; that is, a 20° step is applied at t = 0. Find the response θ(t). (b) Repeat part (a), with the initial conditions θ(0) = 10° and . Note that we have ( ) = 30° / s assumed that the units of time for the system is seconds. (c) Verify the solution in part (b) by first checking the initial conditions and then substituting the solution into the system differential equation. Solution: (a) From Problem 1.4-1, c 2 + 36 = ∴ Θ( s) = × (s) 36 s + 36 2 20 720 20 as + b = = + 2 s s s2 + 36 s(s + 36) 20s 2 + 720 + as 2 + bs ; ∴ b = 0, a = −20 s( s 2 + 36) 20 −20s + ⇒ Θ(t ) = 20[1 − cos 6t ], t ≥ 0 s s 2 + 36 (b) From (a), 2 = c (t) ! + 36)Θ(s) − sθ(0) − θ(0) = 36Θ c (s) 2 + 36 Θ c (s) + 10s 30 + 2 s + 36 s + 36 2 = 20 20s 10s 30 − 2 + 2 + 2 s s + 36 s + 36 s + 36 = 20 10s 30 − + s s 2 + 36 s 2 + 36 (c) θ(0) = 20 − 10 = 10° From (b), ∴ 720 = 720 7 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual 1.4-3. The input to the satellite system of Fig. P1.4-1 is a step function c result, the satellite angle () (t ) = 5u(t ) in degrees. As a varies sinusoidally at a frequency of 10 cycles per minute. Find the amplifier gain K and the moment of inertia J for the system, assuming that the units of time in the system differential equation are seconds. Solution: From Problem 1.4-1, 2 s +K J ∴ Θ( s) = × 5 a2 5 = 2 , a2 = K J s (s + a 2 )s 5 5s − 2 s s + a2 10 cy min × 1min 1 ⎛1⎞ = cy s ⇒ 2π ⎜ ⎟ rad = a 60 s 6 ⎝6⎠ s = K J , ∴ K and J cannot be determined without additional data. 1.4-4. The satellite control system of Fig. P1.4-1 is not usable, since the response to any excitation includes an undamped sinusoid. The usual compensation for this system involves measuring the angular velocity . The feedback signal is then a linear sum of the position signal and () the velocity signal () dt () dt . This system is depicted in Fig. P1.4-4, and is said to have rate feedback. Satellite R(s) + E K T ® 1 Js - 1 s ® Kv + + Fig. P1.4-4 (a) Derive the transfer function c (s) for this system. (b) The state equations for the satellite are derived in Section 1.4. Modify these equations to model the closed-loop system of Fig. P1.4-4. (c) The state equations in part (b) can be expressed as ( ) = Ax (t ) + Bθ c (t ) 8 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual The system characteristic equation is −A = 0 Show that −A in part (b) is equal to the transfer function denominator in part (a). Solution: 1 K ! ! Θ(s) = 2 T (s) = 2 [Θ c (s) − K v Θ(s) − Θ(s)] Js Ts (a) 2 c (b) 1 (s) = [Θ c (s) − (K v s + 1)Θ(s)] K = Js + KK v s + K 2 K J KK v K s2 + s+ J J (t) = θ(t); x2 (t) = x!1 (t) = θ(t) 2 !! = 1 τ(t) = K [θ (t) − K x (t) − x (t)] (t) = θ(t) v 2 1 J J c ⎡ ⎢ ⎢⎣ (c) − KK v ⎤ ⎡ 0 ⎥ x(t) + ⎢ J ⎥ ⎢⎣ K J ⎦ S + KK v J = s2 + ⎤ ⎥ θc (t) ⎥⎦ KK v K s+ J J 1.5-1. The antenna positioning system described in Section 1.5 is shown in Fig. P1.5–1. In this problem is the yaw angle. Suppose that the gain of we consider the yaw angle control system, where () the power amplifier is 10 V/V, and that the gear ratio and the angle sensor (the shaft encoder and the data hold) are such that o where the units of o (t ) are volts and of (t ) = 0.04θ(t ) () are degrees. Let () be the input voltage to the motor; the transfer function of the motor pedestal is given as () 20 = s(s + 6) E ( s) 9 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual Side view of pedestal Difference amplifier vi Gears Motor voltage vi - vo Voltage proportional to desired angle h(t) Antenna Power amplifier Error Motor e(t) vo Shaft encoder Data hold Voltage proportional to angle Binary code Motor shaft w(t) Top view of pedestal (a) Input gain ®1(s) Power amplifier Vi (s) + Motor/antenna ®(s) E(s) K - Sensor Vo(s) (b) Fig. P1.5-1 (a) With the system open loop [ o the motor ⎡ ⎢⎣ ( ) = 1 s⎤⎥⎦ (t ) is always zero], a unit step function of voltage is applied to . Consider only the steady-state response. Find the output angle degrees, and the angular velocity of the antenna pedestal, () () in , in both degrees per second and rpm. (b) The system block diagram is given in Fig. P1.5-1(b), with the angle signals shown in degrees and the voltages in volts. Add the required gains and the transfer functions to this block diagram. are radians. (c) Make the changes necessary in the gains in part (b) such that the units of () (d) A step input of i (t ) = 10° is applied at the system input at . Find the response () . (e) The response in part (d) reaches steady state in approximately how many seconds? Solution: (a) 2 (s + 6) = 3.33 k 5 9 + + s s+6 s2 10 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual ⎡ 20 ⎤ −20 ⎢s + 6⎥ = (s + 6)2 ⎦ s=0 ⎣ ss ss =−5 9 s=0 ⎛ 5⎞ (t) = ⎜ 3.33t − ⎟ in degrees 9⎠ ⎝ (t) = 3.33 deg / s × 60s 1rcv 5 × = rpm 1 min 360° 9 (b) Ki ∫i(s) Gi Vi(s) 0.04 + 10 E(s) 20 s (s + 6) - ∫(s) deg H VO(s) (c) 1 degree = 0.04 π rad 180 ∫i(s) 0.04 Vi(s) + 10 - VO(s) ∫i(s) 0.04 E(s) 10 E(s) - VO(s) ∫(s) rad 180 r 0.04 Vi(s) + r 180 20 s (s + 6) r 9 s (s + 6) ∫(s) 36 5r 20 Θ( s ) 8 s ( s + 6) = = 2 Θi ( s ) 1 + (0.04)(10) 20 s + 6s + 8 s ( s + 6) (0.04)(10) (d) Θ( s) = 8 10 10 −20 10 × = + + ( s + 2)( s + 4) s s s+2 s+4 ∴ θ(t ) = 10 − 20ε−2t + 10e−4t , t ≥ 0 (e) ε −t τ ⇒ 1 = 2, τ1 = 0.5, τ2 = 1 = 0.25, ∴ tss ≈ 4(0.5) = 2s 4 τ1 11 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual 1.5-2. The state-variable model of a servomotor is given in Section 1.5. Expand these state equations to model the antenna pointing system of Problem 1.5-1(b). Solution: From Eqn. (1-15) T JRa = ⎛ BRa + KT K b ⎞ s⎜ s + ⎟⎠ JRa ⎝ 1 2 K BRa + KT K b 20 , ∴ T = 20; =6 s(s + 6) JRa JRa = θ; x2 = θ! = x!1 !! = −6x (t) + 20e(t) (t) = θ(t) 2 2 (t) + 20(10[0.04θi (t) − 0.04θ(t)]) 2 (t) + 8θi (t) − 8x1 (t) i 1.5-3. (a) Find the transfer function (t) ( ) / Θi (s) This transfer function yields the angle for the antenna pointing system of Problem 1.5-1(b). () in degrees. (b) Modify the transfer function in part (a) such that use of the modified transfer function yields in radians. () (c) Verify the results of part (b) using the block diagram of Problem 1.5-1(b). Solution: (a) From Problem 1.5-1(d), i (s) = 8 s + 6s + 8 2 (b) 1 deg = ( π 180 ) rad (s) i (c) = 8 π 2π 45 × = 2 180 s + 6s + 8 s + 6s + 8 2 ⎛ π9 ⎞ ⎛ 1⎞ (10) ⎜ ⎟ ⎜ K iG1G2 ⎝ 25 ⎠ ⎝ s(s + 6) ⎟⎠ 2π 45 = = = 2 (s) 1 + G G H π 9 ⎛ 36 ⎞ s + 6s + 8 i 1 2 1 + (10) s(s + 6) ⎜⎝ 5π ⎟⎠ ( ) 12 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual 1.5-4. Shown in Fig. P1.5-4 is the block diagram of one joint of a robot arm. This system is described in is the controlling signal, is the servomotor input voltage, Section 1.5. The input () m ( s) ( s) a is the motor shaft angle, and the output a ( s) is the angle of the arm. The inductance of the armature of the servomotor has been neglected such that the servomotor transfer function is second order. The servomotor transfer function includes the inertia of both the gears and the robot arm. and Derive the transfer functions a ( s) / Power amplifier M a (s) / Ea (s). Servomotor Ea K M (s) 200 0.5 s + 1 ®m Gears 1 s 1 100 ®a Fig. P1.5-4 Solution: a (s) = 1 1 ! 2 2K Θ (s) Θ (s) = E (s) = M (s) 100 m 100s m s(0.5s + 1) a s(0.5s + 1) (s) Θ (s) 2K 2 a = ; a = M (s) s(0.5s + 1) Ea (s) s(0.5s + 1) 1.5-5. Consider the robot arm depicted in Fig. P1.5-4. are volts, that the units of both (a) Suppose that the units of a (t ) m (t ) and a (t ) are degrees, and that the units of time are seconds. If the servomotor is rated at 24 V [the voltage a (t ) should be less than or equal to 24 V], find the rated rpm of the motor (the motor rpm, in steady state, with 24 V applied). (b) Find the maximum rate of movement of the robot arm, in degrees per second, with a step volts applied. voltage of a (t ) = 24u(t ) (c) Assume that a (t ) is a step function of 24 V. Give the time required for the arm to be moving at 99 percent of the maximum rate of movement found in part (b). is constrained by system hardware to be less than or equal to 10 V (d) Suppose that the input () in magnitude. What value would you choose for the gain K. Why? Solution: (a) a (s) = − ass k k 2 24 48 96 × = = = 1+ 2 0.5s + 1 s s(0.5s + 2) s(s + 2) s s + 2 48 ⇒ θ! a (t) = 48 − 48ε −2t , t ≥ 0 s+2 (t) = 48° s × 60s 1rev × = 8rpm 1min 360° 13 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual mss (t) = 100 θ! a (t) = 800 rpm (b) From (a), a (t) = 48° s (c) From (a), a (t) = 48(1 − ε −2t ), t ≥ 0 −2t1 = 0.01 ⇒ 2t1 = 4.60 ⇒ t1 = 2.30s (d) a (t) = 24V , rated voltage 1.6-1. A thermal test chamber is illustrated in Fig. P1.6-1(a). This chamber, which is a large room, is used to test large devices under various thermal stresses. The chamber is heated with steam, which is controlled by an electrically activated valve. The temperature of the chamber is measured by a sensor based on a thermistor, which is a semiconductor resistor whose resistance varies with temperature. Opening the door into the chamber affects the chamber temperature and thus must be considered as a disturbance. A simplified model of the test chamber is shown in Fig. P1.6-1(b), with the units of time in , which controls the valve in the steam line, as minutes. The control input is the voltage () shown. For the disturbance With the door closed, () , a unit step function is used to model the opening of the door. ( ) = 0. To sensor circuits RT Door Valve Thermistor Steam line Voltage e(t) Thermal chamber (a) Chamber Disturbance d(t) 2.5 s + 0.5 - Voltage e(t) 2 s + 0.5 + Temperature, 5C c(t) Sensor Voltage 0.04 (b) 14 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual Fig. P1.6-1 (a) Find the time constant of the chamber. (b) With the controlling voltage ( ) = 5u(t ) chamber temperature () and the chamber door closed, find and plot the . In addition, give the steady-state temperature. (c) A tacit assumption in part (a) is an initial chamber temperature of zero degrees Celsius. Repeat part (b), assuming that the initial chamber temperature is . ( ) = 25°C (d) Two minutes after the application of the voltage in part (c), the door is opened, and it remains open. Add the effects of this disturbance to the plot of part (c). (e) The door in part (d) remains open for 12 min. and is then closed. Add the effects of this disturbance to the plot of part (d). Solution: (a) G(s) = 2 K K τ ; ∴ τ = 2 min = = s + 0.5 τs + 1 s + 1 τ (b) C ( s) = 2 5 20 −20 × = + s + 0.5 s s s + 0.5 ∴ c(t ) = 20(1 − ε−0.5t ), t ≥ 0 css (t ) = 20°C C(t) 20 0 (c) 0 8 t, min C ( s) 2 = E (s) s + 0.5 sC(s) − c(0) + 0.5C(s) = 2E(s) from (b) !# # "## $ c(0) + ⇒ c(t) = 20(1 − ε −0.5t ) + 25e−0.5t s + 0.5 −0.5t ,t≥0 C(t) 25 20 0 20 0 8 t, min (d) Disturbance response: Cd ( s) = 5 −2.5 1 −5 · = + s + 0.5 s s s + 0.5 15 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips This work is solely for the use of instructors and administrators for the purpose of teaching courses and assessing student learning. Unauthorized dissemination, publication or sale of the work, in whole or in part (including posting on the internet) will destroy the integrity of the work and is strictly prohibited. Digital Control System Analysis & Design 4e Instructor Manual ( ) ∴ cd (t ) = −5 1 − ε −0.5(t − 2) u (t − 2), since door opened at t0 = 2. ∴ from (c) and (d), ( −0.5t ) u(t) − 5(1 − ε −0.5(t−2) ) u(t − 2) C(t) (e) 20 10 0 0 8 4 12 t, min (e) c(12) = 20 + 5e−6 − 5 + 5e−5 ≈ 15 From (c), with c(0) = 15 ( ) c1 (t ) = 20 1 − ε−0.5t + 15ε −0.5t = 20 − 5e−0.5t ∴ c(t ) = ⎣⎡ 20 − 5ε −0.5(t −12) ⎦⎤ u(t − 12), t ≥ 12 1.6-2. The thermal chamber transfer function ( ) E (s) = 2 (s + 0.5) of Problem 1.6-1 is based on the units of time being minutes. (a) Modify this transfer function to yield the chamber temperature (b) Verify the result in part (a) by solving for () () based on seconds. with the door closed and the input ( ) = 5u(t ) volts, (i) using the chamber transfer function found in part (a), and (ii) using the transfer min. function of Fig. P1.6-1. Show that (i) and (ii) yield the same temperature at Solution: (a) ∴ C (s) K 4 4 0.0333 = = ⇒ = E (s) τs + 1 2s + 1 120s + 1 s + 0.00833 ( ) (b) (i) From Problem 1.1-4(b), c(t ) = 20 1 − ε −0.5t , t ≥ 0 ( ∴ c(1) = 20 1 − ε −0.5 (ii) C (s) = ) 0.0333 5 20 −20 × = + s + 0.00833 s s s + 0.00833 ( ) ∴ c(t ) = 20 1 − ε −0.00833t , t ≥ 0 ( ) ( c(1) = 20 1 − ε−0.00833(60) = 20 1 − ε −0.5 ) 16 Full file at https://testbanku.eu/Solution-Manual-for-Digital-Control-System-Analysis-and-Design-4th-Edition-by-Phillips