Electric Power Systems Research 216 (2023) 109009
Contents lists available at ScienceDirect
Electric Power Systems Research
journal homepage: www.elsevier.com/locate/epsr
A model-based EVs charging scheduling for a multi-slot Ultra-Fast Charging
Station
Ciro Attaianese, Antonio Di Pasquale ∗, Pasquale Franzese, Diego Iannuzzi, Mario Pagano,
Mattia Ribera
Department of Electrical Engineering and Information Technology, University of Naples Federico II, Via Claudio 21, Naples, 80125, Italy
ARTICLE
INFO
Keywords:
Electric Vehicle
Charging slot
High charging power
Optimal strategy
Energy storage systems
Energy efficiency
ABSTRACT
The scientific literature is paying particular attention to Ultra-Fast Charging Stations (UFCSs) that can make
charging times of Electric Vehicles (EVs) comparable with the refuelling time of internal combustion engine
vehicles. In this context, scheduling charging algorithms to manage the available resources deserve significant
attention. This paper proposes an online scheduling algorithm for UFCSs equipped with Battery Energy Storage
Systems. The charging profile is obtained by considering the power and energetic constraints related to
both infrastructure and EVs. The constraints are assessed according to the efficiency of the infrastructure,
for which a power losses estimation approach was proposed and then detailed for the UFCS realized at our
department. Even, the dependence of the maximum EV charging rate on the State of Charge (SoC) is considered.
These aspects are usually neglected. Thus, starting from the measurements of the maximum charging rate for
two commercial EVs, numerical simulations were performed using the proposed algorithm according to two
different scheduling policies, i.e., the not-preemptive ‘First Come Best Served’ and the preemptive ‘Round
Robin SoC’. The numerical results highlight the difference between the two policies regarding the allocation
of resources among vehicles and how the SoC of the BESS affects the overall charging profiles.
1. Introduction
The growing development of the electric vehicle (EV) market emphasizes the need for charging infrastructures technologically efficient
and widespread throughout the territory. Currently, the EV market
and the reference technical literature are paying particular attention
to charging infrastructures capable of managing high charging power
to make charging times comparable to those of the internal combustion engine vehicles. In this context, the Ultra-Fast Charging Stations
(UFCSs) represent one of the most interesting technological solutions,
because they have the capability to charge the EV on-board battery up
to 80% of the State of Charge (SoC) in less than ten minutes [1]. Due
to the pulsed nature of the EV charging process, UFCSs can represent
critical loads for AC distribution grids. Indeed, DC fast chargers are
able to reach rated powers of 350 kW. This may compromise the
stability of the AC power grid [2]. In order to mitigate the effects
of the Ultra-Fast recharge, researchers proposed several solutions in
terms of topologies, architectures, and connections to the grid. For
instance, in [3] authors proposed to connect the infrastructure directly
to the MV grid through a LV/MV transformer. In [4] authors analysed
several solutions to enhance grid stability, such as Smart charging, which
is based on a smart managing of the EV charging process thanks to
the exchange of information among charging companies and utility
operators. Another solution consists in conceiving the UFCS as Microgrid
Ecosystem, in which both Energy Storage Systems (ESSs) and Renewable
Energy Sources (RESs) are used to support the charging process, in such
a way to level the power drawn from the AC grid, and at the same
time to offer services to the AC grid. Even, the authors in [5] exploited
the flexibility and dispatchability of EVs to mitigate the effects on
voltage fluctuations and grid stability due to the uncertainty of the
RESs energy production. Furthermore, it has to be highlighted that the
charging infrastructures can be equipped with multiple slots, which allow charging more EVs simultaneously. This gives rise to several issues
concerning the charging power profiles of each EV and, particularly,
how to share the available energy among more EV owners. Indeed,
in the recent years, the EV charging scheduling problem has receiving
a great deal of attention and several algorithms have been proposed.
According to their features, they can be classified as either offline or
online using both not-preemptive and preemptive scheduler policies.
The offline algorithm requires a huge amount of available data, such
as future time arrival, energy demands and time departure of EVs,
they are formulated in terms of Optimal Power Flow (OPF) problems,
∗ Corresponding author.
E-mail address: antonio.dipasquale@unina.it (A. Di Pasquale).
https://doi.org/10.1016/j.epsr.2022.109009
Received 29 July 2022; Received in revised form 26 October 2022; Accepted 19 November 2022
Available online 1 December 2022
0378-7796/© 2022 Elsevier B.V. All rights reserved.
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
Moreover, [14] considered a preemptive scheduling problem with
commitment requirement. If the scheduler (i.e., the UFCS) is not able
to complete the accepted job by its deadline, then it receives a penalty,
i.e., the scheduler loses the profit corresponding to its job. Under these
assumptions, the work presented an online algorithm, formulated in
terms of competitive ratio, that allows maximizing the scheduler’s profits. Also [15] addressed the problem of online EV charging scheduling
with on-arrival commitment, where the optimal charging rate aims
at maximizing social welfare. It is assumed that, upon its arrival, the
EV communicates its departure time, charging demand, willingness to
pay and maximum instantaneous charging rate. In [16], the authors
proposed a combined approach: an offline pricing method combined
with an online scheduling algorithm, based on a model predictive
control, which aims to approximate the offline minimum-cost solution.
As highlighted by the aforementioned literature, several works tackled the EV charging scheduling problem in online scenarios, with
different objectives and sets of constraints. However, none of the above
works considered the actual behaviour of the UFCS infrastructure to
assess power and energy capacity constraints (ESS). Even though the
variability of the efficiency is taken into account in some analytical
problem formulations, there is no work that assessed and used the UFCS
power-SoC-dependent efficiency to find the optimal EV charging rate.
In addition, another critical point is represented by the instantaneous
maximum charging rate of EVs. Typically, it is assumed as a constant
rated value. However, it is more appropriate to consider the maximum
rate as a function depending on the SoC of the vehicle. Indeed, as
pointed out by the typical charging profiles reported in [17], car manufacturers usually limit the maximum charging power of the vehicle for
high value of SoC in order to preserve the State of Health (SoH) of the
EV battery. Thus, energy efficiency variability and a not-constant maximum charging rate may significantly affect the scheduler’s decisions,
especially in an online on-arrival commitment scenario.
Hence, in the present work, the authors propose an online EV
charging scheduling strategy based on the power losses modelling of
the UFCS to take into account the efficiency dependence on operating
conditions during the scheduling decision. Furthermore, it is assumed
that upon the arrival the vehicle announces its maximum charging rate
(i.e., SoC-Power characteristic) and its energy demand. The charging infrastructure has no information about future arrivals and demands. The
proposed algorithm takes into account the actual power-dependent efficiency of the infrastructure, which was assessed on the UFCS realized
at the laboratory of Electrical Engineering and Information Technology
Department (DIETI) of the University of Naples Federico II. Secondly,
a measuring campaign was carried out, on the abovementioned charging station, in order to determine the maximum charging SoC-Power
characteristic for two commercial EVs. The obtained charging curves
were used to validate the effectiveness of the algorithm. It has been
formulated as a minimization problem, which aims to minimize the
charging time of EVs according to two possible policies based on the
not-preemptive First Come First Served (FCFS) [18] and the preemptive
Round Robin (RR) [19] algorithms.
Thus, the main novelties introduced by this work can be summarized as follows:
Nomenclature
𝛼
𝜂AFE
𝜂BESS
𝜂SABi
𝑓𝑠 , 𝑇𝑠
E BESS
E EVi
I SAB,max
I BESS
I EVi
k
OCV BESS
OCV EVi
P BESS,ch
P BESS,dis
P ENi
P SAB,max
P AFE
P EVi
P EV
P grid
P SAB,in
P SAB,out
RBESS
REVi
SoC BESS
SoC EVi
V BESS
V EVi
V grid
AFE
BESS
EVi
SABi
Power contribution of the EV1 in PEV
Efficiency of the AFE
Discharge efficiency of the BESS
Efficiency of the SABi
Switching Frequency and Period of SAB
Nominal capacity of battery of the BESS
Nominal capacity of battery of the EVi
Maximum Current of the SAB
Current of the BESS
Current of the EVi
Power contribution of the AFE in PEV
Open Circuit Voltage of battery of the BESS
Open Circuit Voltage of battery of the EVi
Charging Power of the BESS
Discharging Power of the BESS
Upper bound of power for the EVi due to
the station’s energy constraint
Maximum Power of the SAB
Output Power of the AFE
Power supplied to the EVi
Power supplied to all vehicles
Installed Power of the Grid
Input Power of the SABi
Output Power of the SABi
Internal battery resistance of the BESS
Internal battery resistance of the EVi
State of Charge of the BESS
State of Charge of the EVi
Voltage of the BESS
Voltage of the EVi
Peak grid phase voltage
Active Front End converter
Battery Energy Storage System
𝑖th Electric Vehicle
𝑖th Single H-Active Bridge converter
which aim to minimize, for instance, both charging and production
costs [6]. The main drawback of such algorithms is that information
may be not available or too expensive to obtain. To overcome these
limitations, online algorithms were introduced since they do not require
any future information but only rely on the current and past EV
profiles, including the arrival and departure times, and the charging
demand of EVs [7]. They are formulated as a constrained optimization
problem in which the optimum charging rate that minimizes costs,
or alternatively maximizes profits, can be achieved through an online
linear programming technique [8], or heuristic techniques [9]. It has
to be noted that the above mentioned approaches require a significant
computational effort, therefore also many online algorithms, which
assume the future information of EVs predictable, such as Whittle’s
index policy [10], the earliest deadline first (EDF) and the least laxity
first (LLF) [11,12] were investigated. However, in [13] a low-complex
algorithm is proposed, that does not require any future information.
The adaptive EV charging is formulated as a feasibility problem that
aims at meeting EVs energy demands before their deadlines while
satisfying charging rate and power constraints. The proposed algorithm
is called Smoothed Least-Laxity-First (SLLF) since it is based on the
LLF and overcomes its limitations concerning the oscillations in the
charging rate and improves its success rate.
• an online EV charging scheduling algorithm, which takes into account both the power losses modelling of the UFCS, and the variability of the EVs’ maximum charging rate according to their state
of charge (i.e., the SoC-Power characteristics of each vehicle);
• the experimental determination of the maximum charging SoCPower characteristic for two commercial EVs;
• the comparison between two alternative scheduling algorithms
(i.e., FCFS and RRS).
The rest of the paper is organized as follows: Section 2 presents the
topology of the UFCS realized at the DIETI. In this section the efficiencies of the infrastructure subsystems are discussed as well. Section 3
provides a brief overview of the scheduling policies, i.e., FCFS and RR.
2
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
Table 1
Rated values.
In Section 4 the proposed charging scheduling strategy is described. In
Section 5 the measured charging profiles for the two commercial EVs
and the numerical results for the proposed scheduling algorithm are
discussed. Finally, Section 6 provides the conclusions.
Parameters
AC rated voltage
DC voltage range
Rated power
Switching frequency
IGBT rated voltage
Cooling
2. The UFCS structure and operating mode
The expected time target of an UFCS to charge EV battery up
to 80% is 10–15 min. Charging slots operate in a voltage range of
450–1000 V DC, with an operating current value up to 450 A [20].
These infrastructures require to be connected to Low Voltage (LV) or
Medium Voltage (MV) three-phase distribution grid. Typically, when
equipped with multiple charging slots, also local energy sources have
to be integrated in the infrastructure in order to reduce the amount
of power delivered from the AC grid, since it is not always possible
to have a strong grid connection [21]. Therefore, in presence of BESSs
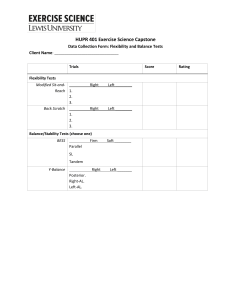
and/or RESs, UFCSs look like smart grids. Figs. 1(a) and 1(b) show a
schematic representation and a view of the UFCS realized at the DIETI
Lab, respectively. The infrastructure is connected to the AC three-phase
grid (400 V∕50 Hz) with a 50 kW AC/DC grid-tied power converter and
it is equipped with a BESS on DC common bus, to reach the rated power
up to 350 kW useful for charging two EVs simultaneously. The UFCS,
as shown in Fig. 1(a), consists of the following main subsystems:
DC voltage range
Output Voltage AC side
Rated Power
Max duty cycle
Max current
IGBT rated voltage
Rated frequency
Cooling
DC input voltage (peak)
DC Rated current
Rated Power
Diode Voltage
400
510–720
50
4
1200
[V]
Square wave
[kW]
–
[A]
[V]
[kHz]
Water
510–720
160
0.5
420
1200
2.6
[V]
[A]
[kW]
[V]
720
400
160
1200
SAB (Medium Frequency Transformer)
Rated active power
Rated Apparent Power
Primary rated voltage
Secondary rated voltage
Max Current at secondary side
Rated frequency
Coil Ratio
Weight
Primary/Secondary Coils Resistance
Total Power Losses
Iron Core
[kW]
160
[kVA]
234
[V]
700
[V]
735
[A]
400
[kHz]
2.6
–
1∕1.05
[kg]
42
[m𝛺]
1, 49∕1, 41
[W]
490
Ferroxube 3C95F/60
BESS
Voltage range
Rated capacity
N modules
Battery technology
[V]
500–710
[Ah]
128
–
168𝑠2𝑝
Lithium Ion - NMC
LC filter
Rated DC current
Max DC voltage
Inductance
Capacitance
Current ripple (peak-peak) at 5.4 kHz
with 𝛼 partial power factors of EVs. According to the following definitions of efficiency:
𝑃
𝑃AFE
, 𝜂BESS,dis = BESS,dis
𝑃grid
𝑃BESS
𝛼𝑃
(1−𝛼)𝑃EV
𝜂𝑆𝐴𝐵1 = 𝑃 EV , 𝜂𝑆𝐴𝐵2 = 𝑃
SAB1 ,in
SAB2 ,in
[V]
[V]
[kW]
[kHz]
[V]
Water
SAB (Diode Rectifier)
In the single configuration, the UFCS allows charging two EVs,
equipped with a battery having a rated voltage up to 450 V. In this
case, according to Fig. 1(a), the switches 𝐾𝑎 and 𝐾𝑏 are closed and 𝐾𝑠
is open. Moreover, when the two SABs work independently, the UFCS is
able to charge two EVs at the rated power of 160 kW. The main features
of this converter are highlighted in Fig. 2.
The instantaneous active power of AFE, 𝑃AFE , and BESS, 𝑃BESS,dis ,
are divided into the two independent power channels. The resultant
charging profile, 𝑃EV , is the sum of time-power demand of each EV:
{
𝑃EV = 𝑃EV1 + 𝑃EV2
(1)
𝑃EV1 = 𝛼𝑃EV , 𝑃EV2 = (1 − 𝛼) 𝑃EV
𝜂AFE =
Value
SAB (H-bridge converter)
• AC/DC four-quadrant grid-tied converter, consisting of the input
LV isolation transformer and the Active Front End converter
(AFE);
• BESS;
• Two DC/DC converters (SAB), each one consisting of a H-Bridge
converter, a medium frequency isolation transformer, a diode
rectifier and a LC filter; they can work independently or in the
twin configuration with the outputs connected in series.
⎧
⎪
⎨
⎪
⎩
Unit
AFE
[A]
[V]
[mH]
[mF]
[A]
400
950
1
1
7
max, 400 A max), by connecting the two SAB converters in series. In
this configuration, (2) and (4) are still valid with 𝛼 = 1.
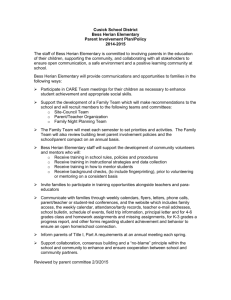
In Fig. 3 the working area of the station is reported. The orange line
refers to the twin mode, whereas the blue line refers to the single.
(2)
2.1. Efficiency assessment
where
⎧
⎪
⎨
⎪
⎩
)
(
𝜂AFE = 𝜂AFE 𝑃grid , 𝑉BESS
(
)
𝜂BESS,dis = 𝜂BESS,dis 𝑃BESS
(
)
𝜂SABi = 𝜂SABi 𝑃EVi , 𝑉EVi , 𝑉BESS
The estimation of UFCS efficiency is based on the computation
of power losses of each subsystem. The following power losses are
considered:
(3)
(4)
– AFE: IGBT and Diode conductive losses; IGBT commutation losses
[22,23];
– SAB: IGBT and Diode conductive losses; IGBT commutation losses;
transformer conductive and iron losses [23,24];
– BESS: joule losses.
where EV0 means no presence of EVs. Alternatively, in single configuration, the UFCS allows charging a single EV equipped with a battery
of 600–800 V. The switches 𝐾𝑎 and 𝐾𝑏 are open and 𝐾𝑠 is closed. The
UFCS is able to charge the EV at a full power up to 320 kW (800 V
The losses are estimated considering the electrical features of the
semiconductor devices and medium frequency transformer according
to the data shown in Table 1, and the typical SAB voltage and current
waveforms depicted in Fig. 2. The latter refer to the case of square wave
The instantaneous efficiency of the UFCS during EVs or BESS charging
are respectively:
1,2)
𝜂𝑈(𝐸𝑉
=
𝐹 𝐶𝑆
𝑃EV
𝑃AFE + 𝑃BESS,dis
0)
𝜂𝑈(𝐸𝑉
=
𝐹 𝐶𝑆
𝑃BESS,ch
𝑃AFE
3
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
Fig. 1. (a) Block diagram of UFCS scheme and power flows, (b) view of UFCS at DIETI lab.
Fig. 3. UFCS working Area: DC output in terms of current (blue line) and power
(orange line).
UFCS efficiency as a function of the EV charging power for minimum,
intermediate and maximum BESS voltage value. The two groups of
curves represent the lower and upper bounds of operating working area
during a fast charge of an EV with 400 V rated voltage. The curves
show, clearly, that the efficiency strongly depends on EV power and
voltage, whereas they are weakly dependent on the BESS voltage.
Fig. 2. Single Active Bridge DC/DC converter, power losses flow, voltage and current
of primary side.
modulation in Zero Voltage Switching condition with phase-shift technique at fixed frequency of 2.6 kHz. This is the modulation technique
implemented on each SAB converter.
2.2. UFCS operating mode
The obtained UFCS efficiency waveforms as a function of EV charging power, BESS and EV voltage values (i.e., 𝑉BESS , 𝑆𝑜𝐶EV , respectively)
are highlighted in Fig. 4. Two groups of curves are represented according to 𝑆𝑜𝐶EV equal to 20% and 80%. Each group of curves highlights
A Peak Shaving (PS) power management strategy has been implemented. The strategy limits the active power supplied by the grid
to the rated value of 50 kW during all the phases of the ultra-fast
charging processes. Therefore, higher power peak requirements are
4
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
Fig. 4. UFCS efficiency on EV power for different values of 𝑆𝑜𝐶EV and 𝑉BESS , and with vehicle rated voltage 400 V.
Fig. 5. Representative peak shaving strategy: 𝑆𝑜𝐶BESS (blue line), 𝑃EV (orange line),
𝑃grid (green line).
supplied by the BESS, in the respect of threshold limits (i.e., 𝑆𝑜𝐶min ≤
𝑆𝑜𝐶BESS ≤ 𝑆𝑜𝐶max ). In Fig. 5, the representative peak shaving strategy
is highlighted for two consecutive charging processes. The grid power
is constantly set to 50 kW (i.e., dotted green line). 𝑆𝑜𝐶BESS , (i.e., blue
line) decreases or increases according to the difference between EV and
grid power.
Fig. 6. Schemes representative of priority algorithms.
Fig. 6 provides an example of how the abovementioned algorithms
work, in particular it highlights the differences in terms of priority
management.
The management of EV charging is a scheduling problem in which
the energy demands of vehicles are the processes, and the energy
available from the grid and the BESS represents the shared resource.
The most prioritized process is the EV charging which benefits from the
most resources under operating constraints. Less prioritized processes
can use only, if present, the residual energy.
In Section 4, the proposed model-based scheduling algorithm is
described. The analytical formulation of such an algorithm includes
both the just introduced scheduling policies in a revised version. In
detail, the policy inspired by the FCFS will be called ‘First Come Best
Served’ FCBS, since the Multi-slot charging station allows charging
more EVs simultaneously. Thus, according to the FCBS, the first vehicle
benefits from most of the shared resources, but the residual can be
used to start charging the less prioritized vehicles. Moreover, The policy
inspired by the RR will be called ‘Round Robin SoC’ (RRS). This policy
will be applied providing a cyclical exchange of priorities among EVs,
in terms of increase in SoC instead of considering time: when the SoC
of the vehicle with the highest priority increases of a fixed 𝛥𝑆𝑜𝐶, this
EV loses its priority and becomes the vehicle with the lowest priority.
3. Scheduling policies for an UFCS
The problem of managing the EVs recharge in a multislot UFCS
addresses two issues: the scheduling strategy for the infrastructure and
the planning of EV charging power profiles. The scheduling strategy
concerns the arrangement of the deadline-constrained charging processes in presence of limited resources. The power profile planning
concerns the strategy with which the right amount of resources are
assigned (i.e., the service offered to each EV). This problem is a typical
‘job scheduling’ with a priority mechanisms.
The ‘job scheduling’ theory has a strong application in computer
science, where the processes executed by a CPU must be managed.
The main scheduling algorithms are categorized as preemptive and notpreemptive. In computing, the word preemption denotes the possibility
for the scheduler to temporarily interrupt an executing task, and resume
it at a later time. In this framework, as pointed out by [25], FCFS
and RR are two of the most common scheduling policies, whose main
features are reported below:
• the FCFS is a not-preemptive algorithm. The priority is fixed and
it is given to the process with earlier arrival time. The subsequent
processes increase their priority when the previous processes are
completed.
• the RR is a particular preemptive algorithm that executes the
charging processes in order of arrival, like the FCFS, but preempts
the running process, placing it at the end of the queue of pending
processes, if execution takes longer than the set ‘‘amount of
time’’, and allowing the execution to continue to the next pending
process.
4. Model-based EV charging scheduling strategy
In this Section, a model-based strategy for planning the power
profiles of a multi-slots UFCS is proposed. The goal is minimizing
the EV charging time (i.e., power maximization) taking into account
the constraints on both power (i.e., supplying and charging limits)
and energy. This strategy can be adopted for an arbitrary number
of charging slots and vehicles. As explained below, in the case of
several vehicles, the scheduling problem needs to establish a priority
5
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
(𝑘)
• Maximum power constraint of UFCS (𝑃SAB,max
): it represents
the maximum deliverable power of the SAB converter (it depends
on the infrastructure rate). The value of this power constraint is:
mechanism among the EVs. Therefore, the fundamentals of the strategy
are:
1. in the presence of a single EV, it has the highest priority, so
the planning of its charging profile is based on the status of the
infrastructure, in terms of available power and energy from grid
and BESS;
2. in the presence of multiple EVs, a priority algorithm has to
be considered. The charging profile of the EV with the highest
priority is determined as in the case of a single EV. The planning
of the charging profile of EVs with lower priority has to consider
power and energy values already assigned to the vehicles with
higher priority. Hence, EVs with lower priorities are subject to
more restrictive constraints than EVs with higher priorities.
(𝑘)
(𝑘) (𝑘)
𝑃SAB
= 𝐼SAB,max ⋅ 𝑉BESS
𝜂SAB
i
where the product between the maximum deliverable current and
(𝑘)
the input voltage (𝑉BESS
) is the theoretical maximum input power
of the SAB at the time interval considered.
(𝑘)
• Energy constraint of UFCS (𝑃EN
): it takes into account the
i
amount of energy available within the BESS. It must be imposed
to ensure that: i) the BESS contains energy enough to supply
the energy demanded by the 𝑖th EV during the 𝑘th interval; ii)
the energy demanded by EVi does not limit the power already
scheduled for the EVs with higher priority. Indeed, the power
supplied to the 𝑖th EV could fully discharge the BESS ahead of
schedule and, as a consequence, it will not be able to feed the
charging profiles already assigned to other EVs.
The residual energy within the BESS at the 𝑘th time interval
(𝑘)
(𝐸BESS
) can be calculated according to the following expression:
4.1. Problem formulation
The problem of scheduling the charging profile for the 𝑖th EV
arriving at the UFCS can be modelled according to the following
minimization problem:
{
𝑃EVi (𝑡) ≤ 𝑃EVi ,max (𝑡)
min 𝑡EVi ,ch such that
(5)
𝑃EV
𝑃EVi (𝑡) ≤ 𝑃SAB,max (𝑡)
(𝑘)
(0)
𝐸BESS
= 𝐸BESS
−
min 𝑡EVi ,ch
(𝑘)
𝑃EV
i
(ℎ)
𝑃BESS,dis
i
(6)
(𝑘)
(𝑘)
𝑃EV
≤ 𝑃EN
i
i
Eq. (6) is obtained by the discretization of (5), for instance through
the forward Euler method, in which the sample time, 𝛥𝑇 , can be chosen
according to the desired levels of accuracy and 𝑘 is the integer index
of the discrete time, such that 𝑡𝑘+1 = 𝑡𝑘 + 𝛥𝑇 . Hence, the problem can
be stated as follows:
(𝑘)
, 𝑃 (𝑘) }
, 𝑃 (𝑘)
max {𝑃EV
,max SAB,max EN
(7)
i
i
The terms in (7) can be assessed as follows:
i
i
(𝑘)
where 𝑉EV
is the terminal battery voltage at maximum battery
i
current value. In order to calculate the voltage, the zero order
battery mathematical model can be used:
i
i
(𝑘)
(𝑘−1)
𝑆𝑜𝐶EV
= 𝑆𝑜𝐶EV
+
i
i
i
(𝑘) (𝑘)
𝑉EV
𝐼
i EVi
𝐸EVi
(ℎ)
𝜂SAB
(12)
𝛥𝑇
(ℎ)
− 𝑃grid 𝜂AFE
(13)
q
(ℎ)
∑𝑘end −1
𝑃BESS,dis
ℎ=𝑘
𝜂BESS
(𝑘)
= 𝐸BESS
−
𝑘end
= max {𝑘end,j }
i
(𝑘)
(𝑘)
(𝑘)
𝑉EV
= 𝑂𝐶𝑉EVi (𝑆𝑜𝐶EV
) − 𝑅EVi ⋅ 𝐼EV
=
𝐸̂ i(𝑘)
(𝑘)
𝑃EN
=
(8)
i
(ℎ)
𝜂BESS
(ℎ)
𝛥𝑇
(14)
∀𝑗 ∈ 𝑛(𝑘)
where 𝑘𝑒𝑛𝑑,𝑗 , is the steps in which the 𝑗th EV will complete its
recharge or its priority will change. In other words, 𝐸̂ i(𝑘) consists
(𝑘)
in the total energy 𝐸BESS
decreased of the amount of BESS energy
already assigned to the EVs with higher priority. Here the nature
of the employed priority policy lies. Indeed, according to the
FCBS or the RRS, the vehicles are sorted from the one with the
highest priority to the one with the lowest priority. According to
this sorting, the energy constrain is assigned. The latter can be
formulated more conveniently in terms of power as follows:
(𝑘)
): The EV on-board Bat• Maximum EV power demand (𝑃EV
i ,max
tery Management System (BMS) communicates to the charging
infrastructure the maximum value of current that the vehicle can
draw, which depends on the on-board battery’s technology, sizing
and 𝑆𝑜𝐶EV . It is remarkable that in order to preserve the battery
State of Health, the BMS could define values quite lower than the
(𝑘)
rated one. Thus, the constraint 𝑃EV
at the 𝑘th time interval
i ,max
can be formulated as follows:
(𝑘)
(𝑘)
(𝑘)
𝑃EV
= 𝐼EV
⋅ 𝑉EV
,max
,max
ℎ=0
It should be noted that 𝑛(ℎ) in (13) is the subset of EVs with higher
priority than EVi at the ℎth step, therefore the number of elements
of 𝑛(ℎ) represents the number of operating SAB converters at each
step. Furthermore, when the there is no vehicle in charge, the
power supplied by the grid is used to charge the 𝐵𝐸𝑆𝑆, therefore,
according to (13) 𝑃BESS,dis becomes negative.
The energy constraint consists of the amount of energy that the
UFCS makes available to the 𝑖th EV according to the priority
policy (e.g., FCBS or RRS). Indeed, if at the 𝑘th step EVi has the
highest priority, the available energy of the BESS would be the
(𝑘)
entire 𝐸BESS
. More in general, for each vehicle, the amount of
available energy from the station (𝐸̂ i(𝑘) ) is defined as follows:
i
i
(ℎ)
𝑃BESS,dis
(ℎ)
∑ 𝑃EVq
𝑞∈𝑛(ℎ)
(𝑘)
(𝑘)
𝑃EV
≤ 𝑃EV
,max
(𝑘)
(𝑘)
𝑃EV
≤ 𝑃SAB,max
𝑘−1
∑
in which the sum represents the gross energy supplied by the BESS
(ℎ)
and the quantity 𝑃BESS,dis
is given by the difference between the
total input power to all the operating SAB converters at the ℎth
step, and the power supplied by the grid:
The objective function seeks to minimize the EVs charging time (𝑡EVi ,ch )
to release the charging slot as soon as possible. The goal is pursued
by maximizing the charging power, taking into account the constraints
on maximum EV and slot charging rate, (𝑃EVi ,max (𝑡)) (𝑃SAB,max (𝑡)) respectively. Moreover, 𝑃EN (𝑡) is a power constraint depending on energy
available from BESS and EV, as well as on the scheduling policy. It is
to underline, the constraints are time variant due to their dependence
on 𝑆𝑜𝐶EV and 𝑆𝑜𝐶BESS . Therefore, in order to solve it numerically, the
following discrete model has to be considered:
⎧
⎪
⎪
such that ⎨
⎪
⎪
⎩
(11)
i
𝐸̂ i(𝑘)
𝛥𝑇
(𝑘)
(𝑘)
𝜂BESS
𝜂SAB
(15)
i
(𝑘)
where 𝑃EN
represents the EV charging power that would consume
i
̂ (𝑘)
𝐸i
(𝑘)
𝜂BESS
the whole 𝐸̂ i(𝑘) in a single time interval. The quantity 𝛥𝑇
is the power that the BESS would supply to run out the energy
available for the 𝑖th EV.
(9)
Eventually, noteworthy is that the priority policies affect only the
assessment of the energy constraint. Indeed, the latter determines the
distribution of the shared resources, whereas the other constraints refer
to the technical limitations in terms of instantaneous power.
⋅ 𝛥𝑇
(10)
where for the current the passive sign convention was adopted.
6
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
Table 2
EVs Data.
4.2. Constraint numerical assessment
The numerical assessment of the constrains is mandatory for formulating the proposed strategy. The first constraint 𝑃𝐸𝑉 i,𝑚𝑎𝑥 can be
(𝑘)
easily calculated by replacing (9) in (8), where 𝐼EVi ,max and 𝑆𝑜𝐶EV
are
i
known. Hence:
(
)
(𝑘)
(𝑘)
(𝑘)
(𝑘)
𝑃EV
=𝐼EV
⋅ 𝑂𝐶𝑉EV
𝑆𝑜𝐶EV
+
i ,max
i ,max
i
i
(16)
[
]2
(𝑘)
− 𝑅EVi ⋅ 𝐼EV
,max
i
(𝑘)
The second constraint 𝑃𝑆𝐴𝐵i,𝑚𝑎𝑥
, as highlighted by (11) depends on the
(𝑘)
quantity 𝑉BESS
. It can be calculated according to the battery model by
(𝑘)
considering the current (𝐼BESS
) that the BESS should deliver so that SABi
supplies the maximum current (𝐼SAB,max ). Hence the problem can be
formulated as reported below:
⎧
⎪
⎨
⎪
⎩
(𝑘)
(𝑘)
𝑃grid ⋅𝜂AFE (𝑉BESS )
∑
(𝑘)
(𝑘)
𝐼BESS
= 𝐼SAB,max + 𝑞∈𝑛(ℎ) 𝐼𝑆𝐴𝐵
−
(𝑘)
q
𝑉BESS
(
)
(
)
(𝑘)
(𝑘)
(𝑘)
(𝑘)
𝑉BESS
= 𝑂𝐶𝑉 𝑆𝑜𝐶BESS
− 𝑅BESS ⋅ 𝐼BESS
𝑉BESS
Parameters
Unit
EV1
EV2
Rated discharge power
Specific energy
Consumption
Autonomy (WLTO)
Nominal battery capacity
Nominal battery voltage
Max charge power
Full charge time
Propulsion type
[kW]
[kWh/100 km]
230
22.3
150
17.2
[km]
[kWh]
[V]
[kW]
[min]
–
330
71
450
130
30
IM
520
77
400
130
50
BR
Table 3
Case studies.
(17)
Quantity
Unity
Case A
Case B
Arrival time EV1
Arrival time EV2
𝑆𝑜𝐶EV10
𝑆𝑜𝐶EV20
𝑆𝑜𝐶EV,max
𝑆𝑜𝐶BESS0
[min]
[min]
[pu]
[pu]
[pu]
[pu]
0
2
0.4
0.2
0.8
0.8
0.5
(𝑘)
in which 𝐼SAB
can be calculated as following:
q
(𝑘)
=
𝐼SAB
q
(𝑘)
𝑃EV
q
and slots since it is based on the analytical model obtained for the
charging station installed at the DIETI. However, this does not affect
the goodness of the obtained results, which aim to show how to
deal with EV charging scheduling problems taking into account the
dependence of the efficiency on the power and the SoCs (i.e., voltages),
and SoC-dependent EV maximum charging rate.
(18)
(𝑘)
(𝑘)
𝑉BESS
𝜂EV
q
(𝑘)
(𝑘)
It worth noting that the cross dependence of 𝐼BESS
and 𝑉BESS
makes
non-linear. Furthermore, calculated the BESS voltage, the maximum
power of the UFCS can be defined according to the following non-linear
system:
( (𝑘)
)
⎧
𝑃SAB ,𝑚𝑎𝑥
(𝑘)
(𝑘)
i
⎪ 𝑃 (𝑘)
=
𝐼
⋅
𝑉
⋅
𝜂
SAB,max
(𝑘)
SABi ,𝑚𝑎𝑥
BESS
SABi
𝑉EV
⎪
i
(19)
⎨
(𝑘)
(
)
𝑃SAB ,𝑚𝑎𝑥
⎪ 𝑉 (𝑘) = 𝑂𝐶𝑉 (𝑘) 𝑆𝑜𝐶 (𝑘) − 𝑅 ⋅
i
EVi
(𝑘)
EVi
EV
EVi
⎪
𝑉EV
⎩
i
5.1. EV charging current profiles
In order to validate the strategy in a real scenario, the maximum
power demand profile (i.e., 𝑃EV,max ) and the 𝑆𝑜𝐶 − 𝐼 characteristic
of two commercial EVs were evaluated in a preventive experimental
measurement campaign. The most relevant features of both vehicle are
reported in Table 2.
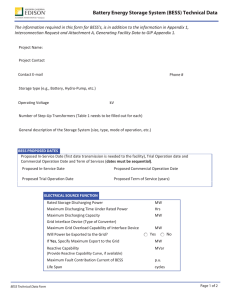
The two vehicles were charged separately, from values of SoC close
to zero up to 100%, with the BESS full charged. The measurements,
in terms of absorbed current, EV battery voltage, and absorbed power
are reported in Fig. 7. It can be noted that the two charging modes as
a function of 𝑆𝑜𝐶EV are different. The maximum power requirements
of EV2 begins to decrease for values of 𝑆𝑜𝐶EV around 40%, whereas
EV1 keeps a constant power (i.e., 120 kW) up to 65% of 𝑆𝑜𝐶EV . These
behaviours depend on the strategies imposed by the two car makers
in order to manage the on-board battery temperature (i.e., to preserve
battery lifetime).
Eqs. (17) and (19) need to be solved using a numerical method. In this
work, the fixed point iteration has been chosen.
(𝑘)
(𝑘)
reported in (15) depends on 𝑉BESS
. It can
Also the constraint 𝑃EN
i
be calculated by solving, once again with the fixed point iteration, the
non-linear system:
⎧
⎪
⎨
⎪
⎩
(
)
(𝑘)
(𝑘)
(𝑘)
𝑉BESS
= 𝑂𝐶𝑉BESS 𝑆𝑜𝐶BESS
− 𝑅BESS ⋅ 𝐼BESS
(
)
(𝑘)
̂
𝐸i
∑
(𝑘)
(𝑘)
(𝑘)
(𝑘)
𝐼BESS
=
(𝑘) ⋅ 𝜂BESS 𝑉BESS +
𝑞∈𝑛(ℎ) 𝐼𝑆𝐴𝐵 −
𝛥𝑇 ⋅𝑉BESS
q
(𝑘)
(𝑘)
𝑃grid ⋅𝜂AFE (𝑉BESS )
(𝑘)
𝑉BESS
(20)
(𝑘)
𝐼BESS
where
represents the current that the BESS should deliver, in one
time interval, in order to supply the whole 𝐸̂ i(𝑘) to 𝑖th vehicle.
5.2. FCBS vs RRS
5. Numerical results
Two case studies, i.e., Case A and Case B, were analysed. The assumed operating conditions are given in Table 3, which shows that the
two scenarios differ only in the BESS initial 𝑆𝑜𝐶 (𝑆𝑜𝐶BESS0 ), whereas
EVs arrival times, initial and final SoC (𝑆𝑜𝐶EV10 , 𝑆𝑜𝐶EV20 , 𝑆𝑜𝐶EV,max )
were kept the same.
Figs. 8 and 9 show the resulting charging profiles obtained according to the two alternative priority policies discussed above.
For the sake of clarity, the power profiles are marked with:
Matlab®
The model-based strategy was implemented in
2019b.
A sample time of 1 min was assigned since it represents a good
compromise between calculation effort and accuracy. The numerical
results aim at assessing the behaviour of the modelled infrastructure
(i.e., DIETI UFCS) according to the two proposed alternative priority
algorithms, i.e., FCBS and RRS. The case studies aim to show how
initial conditions on EVs SoC 𝑆𝑜𝐶BESS , and the management of the
priority can affect the resultant charging power profiles. Furthermore,
the numerical validation of the strategy exploited the EV maximum
charging rate obtained from the measures carried out on the DIETI
UFCS for two different commercial EVs.
It has to be highlighted that the proposed algorithm was formulated
for an arbitrary number of vehicles and slots of the UFCS, nevertheless, the following numerical analysis focuses on only two vehicles
• square-shaped marker, when the curve is limited by the EV maximum power constraint (𝑃EV,max );
• triangle-shaped marker, when the curve is limited by the SAB
maximum power constraint (𝑃EV,max );
• circle-shaped marker, when the curve is limited by the energy
constraint (𝑃EN ).
7
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
Fig. 8. FCBS Vs RR — Case A.
As a consequence, the charging power profile available for the EV2 can
be calculated by using only the residual BESS energy. This means that
the charging profile assigned to EV1 is a constraint for charging EV2 .
In case of FCBS algorithm, the residual BESS energy allows to charge
EV2 at its maximum power only for the first two minutes (Fig. 9(a)).
Later, the charge process stops and resumes only when EV1 is fully
charged. So, being 𝑆𝑜𝐶BESS low, the slots charges EV2 by the grid power
(i.e. 50 kW).
RRS algorithm varies cyclically EV priority during the charging
phase. In detail, each EV holds the priority for a time interval related at
increasing its SoC of 20%. The solution provided by the RR algorithm
highlights the following charging modes:
Fig. 7. Experimental values of current (a), voltage (b) and power (c) referring to the
charge of two different vehicles.
In Case A, when the BESS initial SoC is 0.8, the UFCS charges
simultaneously the two EVs. Noteworthy is that the FCBS and RRS
algorithms give the same results. Indeed, Fig. 8(a) shows that the active
constraint over the entire charging phase is 𝑃EV,max , since as pointed out
by Fig. 8(b) the BESS is not fully discharged at the end of the recharge
of both vehicles. As a consequence, the charging profiles of Fig. 8(a)
are equivalent to the power profiles of Fig. 7 in the SoC range [0, 0.8].
UFCS maximum power constraint (i.e., 𝑃SAB,max ) does not act, being
higher than the two 𝑃EV,max .
More relevant is Case B. As a consequence of the lower BESS
initial SoC, the priority algorithms give different results. The results are
highlighted in Fig. 9, in which Figs. 9(a) , 9(c), 9(e) and 9(g) focus on
the results of the FCBS algorithm, whereas Figs. 9(b), 9(d), 9(f) and 9(h)
relate to the RRS algorithm. Figs. 9(a) and 9(b) point out the charging
power profile of the two EVs. Figs. 9(c) and 9(d) show the value of the
energy constraint, whereas Figs. 9(e) and 9(f) highlight the behaviour
of 𝑆𝑜𝐶EV1 , 𝑆𝑜𝐶EV2 and 𝑆𝑜𝐶BESS . Furthermore, in Figs. 9(g) and 9(h)
it is shown the behaviour of the UFCS in terms of efficiency, which is
computed according the approach explained in Section 2.
The analysis of the results highlights the differences between the
adoption of the two alternative strategies. In Case B, more constraints
are active over the entire charging phase. In case of FCBS, the EV1
(solid blue line) has the highest priority over its entire charging phase.
Therefore, the UFCS makes available to EV1 the full BESS energy and
the grid power. The charge of EV1 is the fastest as it is possible. The
parameters for charging EV1 are calculated at its arrival at the station.
• 0 min ≤ 𝑡 ≤ 4 min: the charging power profiles and the values
of 𝑃EN are equivalent to those of the FCBS, where EV1 has the
priority. At the time (𝑡 = 4 min) EV1 ’s SoC is increased by +20%
and, hence, the algorithm assign the priority to EV2 .
• 4 min < 𝑡 ≤ 7 min: all the UFCS energy is available for
EV2 . Thus, EV2 can be charged at its maximum power value.
This estimated time horizon of priority uses a limited amount
of 𝑆𝑜𝐶BESS , therefore also EV1 can be charging at its maximum
power value.
• 7 min < 𝑡 ≤ 12 min: EV1 gets the highest priority again; the
amount of BESS energy is not enough for charging both the
vehicles at their maximum powers. Initially, EV1 charges at its
maximum power, whereas EV2 is not charged; three minutes later,
the energy constraint limits the charging power. At 𝑡 = 10 min the
BESS is fully discharged, therefore the charging continues using
only the grid power.
• 12 min < 𝑡 ≤ 49 min: EV1 and EV2 are charged alternatively,
according to the assigned priority.
Table 4 shows the comparison between the two proposed priority algorithms, in terms of charging time and average supplied power. If the
8
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
Fig. 9. FCBS Vs RRS — Case B.
𝑆𝑜𝐶BESS0 is high, the two priority algorithms produce no differences. If
the BESS is only partially charged, the FCBS algorithm, as expected,
favours unequivocally the first arrived vehicle. On the contrary, the
RRS allows a fairer sharing of resources. Indeed, Fig. 9(f) discloses that,
for instance, EV2 reaches 𝑆𝑜𝐶 = 0.51 at 𝑡 = 19 min whereas according
to Fig. 9(e) it reaches the same value at 𝑡 = 28 min. Therefore,
if the owner of EV2 was not interested in fully charging its vehicle
or if 𝑆𝑜𝐶EV20 was higher, the RRS policy would provide a significant
improvement in the service offered to second vehicle.
Table 4
Priority policies comparison.
6. Conclusion
depends on the SoC. Such an algorithm is formulated as an optimization
problem, whose objective function is the minimization of charging time
for each vehicle. This aim is pursued by taking into account power and
energy constraints referring to both EVs and charging stations. Two
priority policies based on the non-preemptive FCFS and the preemptive RR are proposed. Thus, the effectiveness and the features of the
proposed approach is pointed out by numerical results, which exploit
Case A
FCBS
TEV 1 [min]
TEV 2 [min]
PEV1 ,avg [kW]
PEV2 ,avg [kW]
This paper proposes an online model-based strategy to schedule the
EV charging power profiles for a UFCS equipped with several charging
slots. The algorithm was formalized by accounting for the dependence
of the UFCS efficiency on operating power and voltage values. It also
takes into account that the EV instantaneous maximum charging rate
9
16
21
106.22
91.80
Case B
RR
FCBS
RR
16
48
110.84
39.73
29
49
60.67
39.31
Electric Power Systems Research 216 (2023) 109009
C. Attaianese et al.
the power losses model obtained for the UFCS installed at the DIETI
and the maximum charging rates measured for two commercial EVs.
Future studies will concern the experimental validation of the proposed algorithm through its implementation on the actual charging
infrastructure. In addition, other scheduling strategies and priority
policies will be considered.
[7] Y. Cao, H. Wang, D. Li, G. Zhang, Smart online charging algorithm for electric
vehicles via customized actor–critic learning, IEEE Internet Things J. 9 (1) (2021)
684–694.
[8] L. Guo, K.F. Erliksson, S.H. Low, Optimal online adaptive electric vehicle
charging, in: 2017 IEEE Power & Energy Society General Meeting, IEEE, 2017,
pp. 1–5.
[9] M. Alonso, H. Amaris, J.G. Germain, J.M. Galan, Optimal charging scheduling
of electric vehicles in smart grids by heuristic algorithms, Energies 7 (4) (2014)
2449–2475.
[10] Z. Yu, Y. Xu, L. Tong, Deadline scheduling as restless bandits, IEEE Trans.
Automat. Control 63 (8) (2018) 2343–2358.
[11] A. Subramanian, M.J. Garcia, D.S. Callaway, K. Poolla, P. Varaiya, Real-time
scheduling of distributed resources, IEEE Trans. Smart Grid 4 (4) (2013)
2122–2130.
[12] J.A. Stankovic, M. Spuri, K. Ramamritham, G. Buttazzo, Deadline scheduling
for real-time systems: EDF and related algorithms, vol. 460, Springer Science &
Business Media, 1998.
[13] N. Chen, C. Kurniawan, Y. Nakahira, L. Chen, S.H. Low, Smoothed least-laxityfirst algorithm for electric vehicle charging∶ online decision and performance
analysis with resource augmentation, IEEE Trans. Smart Grid 13 (3) (2021)
2209–2217.
[14] S. Chen, L. Tong, T. He, Optimal deadline scheduling with commitment, in: 2011
49th Annual Allerton Conference on Communication, Control, and Computing
(Allerton), IEEE, 2011, pp. 111–118.
[15] B. Alinia, M.H. Hajiesmaili, N. Crespi, Online EV charging scheduling with
on-arrival commitment, IEEE Trans. Intell. Transp. Syst. 20 (12) (2019)
4524–4537.
[16] Z.J. Lee, J.Z. Pang, S.H. Low, Pricing EV charging service with demand charge,
Electr. Power Syst. Res. 189 (2020) 106694.
[17] P3 Charging Index Report 07/22 – Comparison of the fast charging capability
of various electric vehicles, https://www.p3-group.com/en/p3-charging-indexcomparison-of-the-fast-charging-capability-of-various-electric-vehicles-from-ausers-perspective_07-22. (Available [online], accessed: July 22, 2022).
[18] U. Schwiegelshohn, R. Yahyapour, Analysis of first-come-first-serve parallel job
scheduling, in: SODA, vol. 98, Citeseer, 1998, pp. 629–638.
[19] T. Balharith, F. Alhaidari, Round robin scheduling algorithm in CPU and cloud
computing: a review, in: 2019 2nd International Conference on Computer
Applications & Information Security, ICCAIS, IEEE, 2019, pp. 1–7.
[20] L. Rubino, C. Capasso, O. Veneri, Review on plug-in electric vehicle charging
architectures integrated with distributed energy sources for sustainable mobility,
Appl. Energy 207 (2017) 438–464.
[21] A. Ahmad, Z. Qin, T. Wijekoon, P. Bauer, An overview on medium voltage grid
integration of ultra-fast charging stations: Current status and future trends, IEEE
Open J. Ind. Electron. Soc. (2022).
[22] J.K. Murali, V. Chandrasekar, S. Mohan, et al., Analysis, estimation and
minimization of power loss in CCM operated PSFB converter, in: 2016 IEEE
International Conference on Power Electronics, Drives and Energy Systems,
PEDES, IEEE, 2016, pp. 1–5.
[23] D. Gravoc, M. Purschel, IGBT power losses calculation using the data-sheet
parameters, Infineon Tech. AG, Neubiberg, Germany, 2009, p. 17.
[24] Z. Emami, M. Nikpendar, N. Shafiei, S.R. Motahari, Leading and lagging legs
power loss analysis in ZVS phase-shift full bridge converter, in: 2011 2nd
Power Electronics, Drive Systems and Technologies Conference, IEEE, 2011, pp.
632–637.
[25] M. Chetto, Real-Time Systems Scheduling 1: Fundamentals, vol. 1, John Wiley
& Sons, 2014.
CRediT authorship contribution statement
Ciro Attaianese: Conceptualization, Methodology, Writing –
original draft, Writing – review & editing, Supervision. Antonio
Di Pasquale: Conceptualization, Methodology, Software, Writing
– original draft, Writing – review & editing. Pasquale Franzese:
Conceptualization, Methodology, Software, Writing – original draft.
Diego Iannuzzi: Conceptualization, Methodology, Writing – original
draft, Writing – review & editing, Supervision. Mario Pagano:
Conceptualization, Methodology, Writing – original draft, Writing
– review & editing, Supervision. Mattia Ribera: Software.
Declaration of competing interest
The authors declare that they have no known competing financial
interests or personal relationships that could have appeared to
influence the work reported in this paper.
Data availability
The data that has been used is confidential.
References
[1] H. Hõimoja, M. Vasiladiotis, S. Grioni, M. Capezzali, A. Rufer, H.B. Püttgen,
Toward ultrafast charging of electric vehicles, Tech. rep., 2012.
[2] M. Hosseinzadehtaher, D. Tiwari, N. Kouchakipour, A. Momeni, M. Lelic, Z.
Wu, Grid resilience assessment during extreme fast charging of electric vehicles via developed power hardware-in-the-loop, in: 2022 IEEE Transportation
Electrification Conference & Expo, ITEC, IEEE, 2022, pp. 929–934.
[3] L. Wang, Z. Qin, T. Slangen, P. Bauer, T. van Wijk, Grid impact of electric vehicle
fast charging stations: Trends, standards, issues and mitigation measures-an
overview, IEEE Open J. Power Electron. 2 (2021) 56–74.
[4] N. Deb, R. Singh, R.R. Brooks, K. Bai, A review of extremely fast charging stations
for electric vehicles, Energies 14 (22) (2021) 7566.
[5] S. Chang, Y. Niu, T. Jia, Coordinate scheduling of electric vehicles in charging
stations supported by microgrids, Electr. Power Syst. Res. 199 (2021) 107418.
[6] N. Chen, C.W. Tan, T.Q. Quek, Electric vehicle charging in smart grid: Optimality
and valley-filling algorithms, IEEE J. Sel. Top. Sign. Proces. 8 (6) (2014)
1073–1083.
10