Nuclear Plant Models for Power System Stability Studies
advertisement

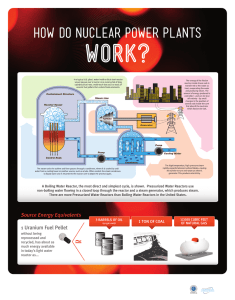
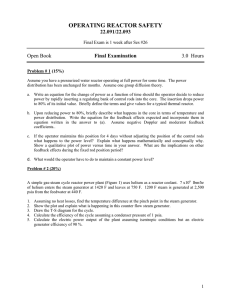
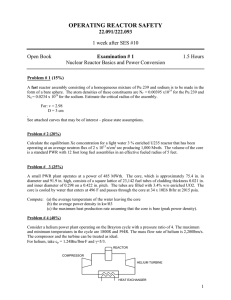
141 IEEE Transactions on Power Systems, Vol. 10, No. 1, February 1995 Nuclear Plant Models for Medium- to Long-term Power System Stability Studies T. Inoue Member, IEEE T. Ichikawa Member, IEEE CRIEPI Tokyo, Japan Abstract - CRIEPI and EPRI have jointly developed PWR and BWR nuclear power plant models for medium- to long-term power system dynamic simulation studies, which a r e being implemented for EPRI’s and CRIEPI’s long-term stability programs respectively. The models are extended versions of CRIEPI’s previous one for short-term simulation. The models are useful in simulating the plant dynamics taking into account responses of the plant control and protection systems. The paper presents functional spefification of the models, overall model description, newly included models for medium- to long-term studies and sample simulation results. Key Words: Power system analysis, Medium- to long-term stability, Computer simulation, Nuclear plant models 1. INTRODUCTION The electricity demand has been continually increasing and is expected to increase especially in load centers such as metropolitan areas. To cope with the increasing demand, new large capacity nuclear and thermal generating power plants have been constructed. However, due to various constraints such as the site availability, the plants are being located farther and farther from the load centers. Furthermore, construction of new transmission lines have been lagged behind due to various factors such as environmental considerations, costs. In addition, interconnections between utilities have been increased for flexible operations of the power system in reserve capacity, economic dispatching and so on. The background mentioned above has been making the power system vulnerable to faults which are outside the normally supposed contingency criteria of the system. Under a severe disturbance condition, large imbalance between power supply and demand might be caused, leading to large excursions in the system frequency and voltage from the rated values. These excursions may, in turn, induce large transient in the generating plant output, or plant trip, compounding the severity of the situation. Unless precautionary measures are taken, such faults may eventually lead to a black-out of the whole system. Therefore, it is important for those who operate power systems to be aware of potential weak points of the system, and to provide countermeasures for overcoming the weak points. For this purpose, it is necessary to develop a computer program to simulate power system dynamic behaviors with a reasonable accuracy in medium- to longterm time frame (several ten seconds to several minutes) in addition 10 short-term or transient stability studies. 9 4 WM 187-5 PWRS A paper recommended and approved by the IEEE Power System Engineering Committee of the IEEE Power Engineering Society for presentation at the IEEE/PES 1994 Winter Meeting, New York, New York, January 30 - February 3 , 1994. Manuscript submitted July 26, 1993; made available for printing December 6, 1993. P. Kundur Fellow, IEEE P. Hirsch Member, IEEE Ontario Hydro Toronto, Canada EPRI Palo Alto, CA In such a simulation program, it is especially significant to simulate the long-term plant responses including plant trip in the medium- to long-term period after the initial power system disturbance. Simplified plant models traditionally used for short-term stability analysis are inadequate for power system long-term dynamics analysis. The Central Research Institute of Electric Power Industry (CRIEPI) in Japan and the Electric Power Research Institute (EPRI) in the U.S.A. initiated a joint effort for studying power system long-term dynamics, especially for developing nuclear and thermal plant models applicable to long-term dynamics analysis, utilizing rich experiences and know-how obtained in developing power system analysis tools and in studying power system dynamics in both institutes and their affiliates. This paper presents the nuclear plant models that have been developed by CRIEPI, extending its previous versions for short-term simulation [1],[2] while the companion paper [3] presents the thermal plant models that have been developed by Ontario Hydro, on behalf of EPRI. All these plant models are being implemented for EPRI’s and CRIEPI’s long-term stability programs respectively. 2. FUNCTIONAL SPECIFICATIONS Some approaches for modeling of nuclear plant dynamics for power system long-term dynamics have been proposed [4]-[6]. These models, however, are generally simple, based on the assumption that excursions in power system frequency and voltage caused by system disturbances are small. Thus they are not able to be utilized to a severe situation probable in the long-term studies such as that excursions in the frequency and voltage cause severe transients in the reactor of a nuclear plant and activate the protection which decreases the reactor power or shut down the reactor. To develop an adequate nuclear plant model which is able to simulate the plant transients, considering reactions of the plant control and protection systems, it is important to define functional specifications of a nuclear plant model. They clearly specify that how power system disturbances cause transients in the plant, and which variables, control systems and protection systems of the plant components must be modeled to accurately represent plant transients including plant trip. In this chapter, the functional specifications of models for PWR (Pressurized Water Reactor) plant and BWR (Boiling Water Reactor) plants are presented, which have been defined in the joint research. 2.1 Transients of lnteresi Operation of the nuclear power plants may be adversely affected by power system disturbances. For example, if the power system frequency/voltage disturbances are large, the turbine control valves may be operated quickly and/or the electrical-motor-driven pumps in the auxiliary systems may be affected. Subsequent change in the main steam pressure or the reactor coolant flow rate causes severe transients in the reactor system and the reactor protection system may decrease the reactor power immediately or even shut down the reactor. There are two major avenues for power system disturbances to cause transients in the reactor. The first is the path for the frequency disturbance only (and not for voltage disturbance) to affect the plant operation. That is the path 0885-8950/95/$04.00 0 1994 IEEE 142 from the power system to the reactor through the generator. the turbine and the main steam lines for both B W R and the PWR plants and additionally the steam generators (SGs) and the reactor coolant system for the P W R plant. The direction of the path is the reverse of the normal energy flow from the reactor to the generator. When the system frequency increases, the turbine speed governor system reacts by closing the turbine control valves automatically, while the turbine bypass valves are simultaneously operated to open. Due to a limited capacity of the bypass valves, a steam flow rate transient in the main steam lines results. In a BWR plant this results in a reactor steam pressure increase to which the neutron flux is very sensitive. In a PWR plant, on the other hand, a steam flow rate transient produces a temperature transient in the reactor coolant system. In addition to the above, if it lasts that the bypass valves remains opening for several minutes, subsequent drop in the enthalpy or temperature of the feedwater occurs due to decrease in the steam flow rate for heating the feedwater, which is extracted form the turbines. In a B W R plant, the drop in enthalpy of the feedwater which directly enters the reactor will increase the reactor power. If the increase rate of the reactor power is expected to exceed a specified limit, plant operators will decrease the reactor power using the recirculation flow, which leads to closing of the bypass valves. In a P W R plant, the drop will not affect the reactor since the steam generator will almost absorb the influence of the drop. The second is the path for both the frequency and voltage disturbances to affect the plant operation. That is the path through the house power system and induction motors in auxiliary systems. The disturbances of the system frequency and voltage result in speed change of the motors. The reactor coolant pumps in a P W R plant are driven by induction motors directly connected to the house power system. A coolant flow rate transient caused by a pump speed transient results in a coolant temperature transient. Therefore, this path is particularly important for a P W R plant. In a BWR plant, on the other hand, although the reactor coolant recirculation pumps are also driven by induction motors, these motors are not directly connected by the house power system. The motors are powered by frequency regulated power sources such as motor-generator (M-G) sets equipped with fluid couplers, or thyristor controlled variable frequency power supplies. Thus the second path is not as critical for a B W R plant. 2.2 Model Scopes 2.2.1 Plant Types The following major types of the plants commercially operated in Japan and the U.S.A were selected for modeling. (1) PWR plant * Turbine bypass system with bypass capacity of 40% or 70% of rated main steam flow rate * Turbine control system with electro-hydraulic control equipments Steam generator feed water system with turbine-driven or motor-driven feed water . oumm . ( 2 ) BWR plant * Turbine bypass system with bypass capacity .. . .. . . of 25% or 100% of rated main steam flow rate * Turbine control system with electro-hydraulic control equipments Reactor feed water system with turbine-driven or motor-driven feed water pumps - 2.2.2 Plant Variables Figs. 1 and 2 show plant components that have been specified so that the plant models precisely simulate the transients in the plants along two avenues from the power system to the reactor. ( 1 ) Control systems The following plant control systems is modeled. These systems will respond to the plant transients caused by the power system disturbances Moislure separator & rehealel steam generator Feed water control valve Reactor coolant pump Fig.1 Modeled Components in PWR Plant Model Moisture separalor 3eanor T"*,"e Control YalVe Fig. 2 Modeled Components in BWR Plant Model --- (1.1) PWR plant Reactor power control * Pressurizer level control Pressurizer pressure control Steam generator feed water control Steam generator relief valve control * Bypass valve control Turbine speed control including normal over speed control ( 1 . 2 ) BWR plan1 Recirculation flow control Reactor pressure control Reactor relief valve control Reactor feed water control Turbine speed control including normal over speed control ( 2 ) Protection system The following reactor trip factors is included in the plant model. These factors may be detected under the severe reactor transients caused by the power system disturbances. (2.1) PWR plant * High neutron flux High rates in neutron flux change (increase and decrease ) Over temperature * Over power Low house power frequency Low house power voltage Low SG level Turbine trip (2.2) BWR plant High neutron flux * High reactor pressure * Low reactor coolant level -- 143 -- * Control valve quick closing actuated through power-load Doppler reactivity Coolant temperature reactivity Average reactor coolant temperature Thermal power in fuel rods Coolant flow rate Coolant temperature in reactor core outlet Coolant temperature in reactor core inlet Coolant temperature in hot-leg * Coolant temperature in cold-leg Coolant temperature in SG inlet * Coolant temperature in SG outlet Thermal power in SGs SG steam pressure SG water level SG feed water flow rate Pressurizer coolant level Pressurizer coolant pressure * Pressurizer heater power (4.2) BWR plant Average neutron flux (reactor power) * Control rod reactivity (in case of selective rod insertion) * Void reactivity Doppler reactivity * Coolant temperature reactivity Void fraction in reactor core * Thermal power in fuel rods Coolant recirculation flow rate Coolant flow rate in reactor core Coolant enthalpy in reactor core inlet Coolant boiling start height in core Generated steam flow rate in reactor core Coolant enthalpy in reactor downcomer inlet Steam pressure in reactor core/upper plenum Steam pressure in reactor dome * Steam flow rate in reactor relief valves * Coolant flow rate in reactor separator Reactor coolant level Reactor feed water flow rate .. unbalance relay (for the BWR plant with partial turbine bypass system) Low house power frequency (if necessary) * Turbine trip * In addition to the above reactor trip factors, the selective control rod insertion due to control valve quick closing is included in the model of the BWR plant with full turbine bypass system. (3) Main steam system and turbine system The main steam lines, the high and low pressure turbines, the moisture separator & reheaters, the turbine control valves, the intercept valves, the turbine bypass valves is included in the model. As previously described, the operation of control valves and bypass valves resulting in the main steam pressure transients causes the pressure and the temperature transients in the reactor system. The operation of control valves and intercept valves also cause the change in the turbine mechanical power to the generator. Therefore, the behavior of the main steam system and the turbine system is principal. The non-linear characteristics such as rate limits in the operation of those valves and the steam flow rate versus the valve position is included in the model. The following major plant variables is represented in the plant model Main steam line pressure Main steam flow rate Steam flow rate in bypass valves Steam flow rate in steam generator relief valves Steam flow rate in turbine control valves Steam pressure in moisture separators Steam flow rate in turbine intercept valves Turbine power ( 4 ) Reactor system The reactor system model of the PWR plant includes the reactor, the reactor coolant system including the reactor coolant pumps (RCPs), the pressurizer and the SGs. On the other hand, the reactor system model of the BWR plant includes the reactor, the reactor recirculation system. The simulation of the reactor system is significant since it is related to the operation of the reactor protection system. The reactor protection system monitors the plant variables closely related to the integrity of the reactor such as the neutron flux, coolant pressure, coolant temperature and coolant level. The following major plant variables is represented in the plant model. (4.1) PWR plant * Average neutron flux (reactor power) Position of D-bank control rods * Control rod reactivity - - - -- - -- -- 3. Model Structure Figs. 3 and 4 show the overall structure of the PWR plant and BWR plant models respectively. Outlines and features of these models are described below. Temperature - -E:$,s ~eactivity model model A t Thermal' output dynamics model Reactor Steam - cwlant generator - dynamics dynamics model TREF Pressure Main steam flow Bypa= valve model + - model Rod position' Neutron flux TAVG system model TREF Volume TAVG. AT ::lzr Fz2:Ln 1 TAVG system model 1 * Level Flow t Pressure. Level Pressurizer dynamics model __ Turbine protection system model Turbine ;wr; model dynamics model Tripping signal output torque Generator wrrem Generalor speed Terminal vollage Fig. 3 Structure of P W R Plant Model b 144 Temperature Flow Tripping signal I Turbine tripping signal, control valve quick closing signal Generator speed Generator current Turbine system model Reactor system model Fig. 4 Structure of BWR Plant Model 3.1 Main Steam System and Turbine System Models for both PWR and BWR Plan! * The steam pressure in the main steam lines is calculated with 9 consideration to the mass, volume, and energy balance. The bypass valves is modeled with consideration to their rapid opening characteristics. The turbine system is modeled in detail. Special attention is paid to the valve position of each valve in order to simulate its non-linear response including quick closing mechanism. available for both frequency and voltage disturbances has been developed. Fig. 6 shows the block diagram of the pump-motor model. The accuracy of the model have been verified using the RETRAN code developed by EPRI, which is one of the detailed computer codes for transient analysis of a nuclear plant. Fig. 7 shows an example of comparisons between transients simulated by the developed model and the RETRAN code. Neutron flux High change rate of neutron flux 3.2 Reactor System Model for PWR Plant (1) Overview of model The model calculates the neutron flux, the fuel temperature, the coolant temperature, the coolant flow rate, the pressure and level in the SG, and the pressure and level in the pressurizer. The average neutron flux over the entire core region is calculated by the point kinetics representation with six groups of delayed neutrons The average temperature over the entire fuel rods is obtained from the first order lag. The coolant temperature in the primary loop is calculated with consideration to the delay due to the time needed for the coolant to travel in the loop. The secondary coolant in the SG is assumed to consist of two phase saturated steam and saturated water. The SG steam pressure is calculated with consideration to the mass, volume and energy balance in both phases. The SG level is simulated through the change in the saturated water volume and the steam volume under the level. * The pressure and level in the pressurizer is obtained in a similar manner to the SG model. * The model of the reactor protection system is constructed using only those protective factors as shown in Fig. 5. ( 2 ) Simplified model for reactor coolant pump-motor The reactor coolant flow rate is one of the key variables for the PWR plant dynamics under the power system disturbances as already described. In CRIEPI’s previous PWR plant model for short-term power system analysis [l], the coolant flow rate model is not sufficient since transients are simulated by a simple first-order-lag model only for the system frequency disturbances. Accordingly, a new model for reactor coolant pump-motor that is - I Bus frequency of house power Level in steam generator 4 1 - Turbine tdp signal Turbine trip Fig. 5 PWR Reactor Protection System Model Pumo~motormeed I I I l r Simplified pump characteristicscurve 1 l Coolant flow I 1 Simplified coolant system characterislics I I 1 Induction motor ~requenq 01 p w e r supply 1 + L voltage 01 pawet SUPPlY Fig. 6 P W R Reactor Coolant Pump-Motor Model 145 Reactor mlant flow rate ....... Result from the developed model E -Result from RETRAN low pressure turbines and high pressure turbine, and of the feed water lines from the heaters to the reactor vessel. In the developed model, the heater system is represented by one equivalent IOW pressure heater, one equivalent high pressure. heater and one equivalent feed water line. The block diagram of the model is shown in Fig. 9. The validity of the model has been verified by a comparison with an observed feed water temperature transient at a start-up testing before commercial operation in an actual plant. Low pressure feedwater heater LOW 0 -5 5 10 TIME (SEC) - Feedwater line I - in 15 Hi hpressure fem%ater heater Hioh Feedwater enthalpy Rated enthalpy Fig. 7 Developed Model Compared with RETRAN Code 3.3 Reactor System Model for BWR Plant 1.o (I) Overview of model The model mainly calculate the neutron flux (reactor power), the fuel temperature, the generated steam flow rate and the reactor core pressure. The neutron flux and the fuel rod temperature is calculated in the same way as the PWR plant model. The average void volume in the core is simulated by taking account of the core pressure, the starting height of boiling, the core outlet steam quality, the slip ratio of the two-phase flow and the axial output dishbution. The reactor core pressure is calculated separating from the steam dome pressure. * The core flow is calculated from the recirculation flow rate with jet pump characteristics taken into account. The model of the reactor protection system is constructed using o d y those protective factors as shown in Fig. 8. \ Fig. 9 Feed Water Enthalpy Model 4. SAMPLE SIMULATION RESULTS The turbine-generator speed model shown in Fig. 10 was temporarily included in the plant models. The inertia constant (M=2H) was assumed to 10 sec. A simple pattern of the generator power change shown in Fig. 11 was specified as a disturbance for demonstrating performance of the PWR and BWR plant models in simulating plant transients under a power system islanding condition. The simulation result of the PWR plant model is shown in Fig. 12, and that of the BWR model is shown in Fig. 13. Judging from our knowledge which has been cultivated through rich experiences, the simulated results are close to actual response of the plants. P Abnomaliy low level 01 reanor (Opeation 01 ~ c ~ ~ b r a t relay ion or powerdoad unbalance relay) Fig. 10 Turbine-generator Speed Model for Sample Simulation house p w e r SSIBc1IW Control vave is (Operalion 01 -1eration relay or power-bad unbalance relay) rn"Irnl rod 1 .o l"Oeni0" ? -a n ? Fig. 8 BWR Reactor Protection System Model (2) Simplified model for feedwater enthalpy In the CRIEPI's previous BWR plant model for short-term power system dynamic simulation, a model for feedwater enthalpy is not included since the drop in the enthalpy will not appear in a short-term time period. The feed water heater system mainly consists of some stages of heater that heat the feed water mainly by extracted steam from the 0.8 0 0.6 ' 1 .o 0.95 0.85 0 I L 90 180 Time (sec) Fig.11 Specified Pattern of Change in Generator Power 146 :z:h 103Turbine-generator speed NG c to2 Turbine-generator speed NG 101 100 99 I 0 99 30 60 90 120 150 180 0 30 60 90 120 150 180 150 180 TIME [SEC] TIME [SEC] 120 Main steam flow rale Ms Main steam flow rale MS 80 60 0 30 €0 90 120 150 180 TIME [SEC1 . . 8011 0 30 60 90 120 TIME [SEC] 120 l$----Neutron flux N R Main leedwaler Row rale M m 100 80 I 0 90 1 60 30 90 120 150 0 180 30 60 90 120 150 180 150 180 150 180 150 180 TIME [SEC] TIME [SEC] 73.0, Main steam line pressure PSL Vessel pressure Py 71.0 50 0 €0 30 90 120 150 180 70.0L 0 30 60 90 120 TIME [SEC] TIME [SEC] Cwlant now rate MC Main leedwaler flow rate MFW 100 80 0 30 €0 90 120 150 180 0 30 60 TIME [SEC] Average m l a n t temperature TAVG 298 90 120 TIME (SEC] Main feedwater enmalpy H w 210.01 0 30 60 90 120 150 180 0 30 M) 90 120 TIME [SEC] TIME [SEC] Neutron nux N R Fig. 13 BWR Plant Model Sample Simulation Result 5. CONCLUSION I 80 0 30 60 90 120 TIME [SEC] 150 180 150 180 150 180 D-bank mnbol rod positionZROD 180 0 30 60 90 120 TIME [SEC] Pressurizerpressure P ~ R Z 1531 0 30 60 90 120 TIME [SEC] Fig.12 PWR Plant Model Sample Simulation Result The power system long-term dynamic analysis is important in studying measures for stable and reliable operation of the system as well as the short-term stability analysis. It is especially significant for the simulation and the analysis of the power plant dynamics during a few minutes after a disturbance, since the plant responses including various control actions and plant trip might greatly affect the dynamic behavior in system variables such as frequency and voltage which subsequently might cause additional plant responses. Simplified plant models which are used in short-term stability analysis are insufficient for power system long-term dynamics analysis. CRIEPI and EPRI have performed the joint study to develop nuclear and thermal plant models which are able to apply to long-term dynamics analysis. CRIEPI has developed the models for PWR and BWR types of nuclear power plants, while EPRI has developed models for thermal plants. These plant models are being implemented for EPRI's and CRIEPI's long-term stability programs respectively. The developed plant models are more complex than conventional simplified ones used for short-term stability study. These models are useful in simulating the plant dynamics taking into account the 147 responses of plant control and protection systems. These plant models are expected to make substantial contnbution in developing tools for power system long-term dynamics analysis. However, additional effort will undoubtedly be required to enhance their usefulness in the form of collecting and arranging input data for the plant models in order to validate these against specific plant responses to specific disturbance situations. 6. ACKNOWLEDGEMENT This joint study project has been performed for six years as one of the joint projects under the agreement on technical exchange and cooperation between CRIEPI and EPRI. The authors sincerely appreciate concerned all persons in CRIEPI, EPRI and Ontario Hydro. 7. REFERENCES [l] T. Ichikawa and T. Inoue, "Light Water Reactor Plant Modeling for Power System Dynamic Simulation," IEEE Trans. on PS, Vol. PS-3, May/June 1988. [2] Y. Sekine, Y. Oura, T. Sawada, S. Muto, K. Uyeda, T. Ichikawa and H. Taniguchi, "Development of A Precise Simulation P r o g m for Dynamic Analysis of Bulk Power System under Faults," Proc. 8th PSCC, Aug. 1984 [3] P. K. Kar, A. Yan, P. Kundur, H. Taniguchi and P. Husch, "Thermal Plant Models for Medium- to Long-term Power System Stability Studies," Submitted to IEEE Winter Power Meeting (1994). [4] R. P. Schulz and A. E. Turner, "Long-term Power System Dynamics - Phase 11," Final Report for EPRI Research Project 764-1, Report No. EL-367, Feb. 1977. [5] M. A. Di Lascio, R. Moret and M. Poloujadoff, "Reduction of Program Size for Long-term Power System Simulation with Pressurized Water Reactor," IEEE Trans. on PAS, Vol. PAS-1-2, No.3, March 1983. [6] T. W. Kerlin and E. M. Katz, "Pressurized Water Reactor Modeling for Long-term Power System Dynamic Simulation," Final Report for EPRI Research Project 764-4, Report No. EL3087, Vol. I and 2, May 1983. 8. BIOGRAPHY Toshio Inoue was born in Tokyo, Japan on February 15, 1958. He received M.S. degree in Electrical Engineering from Waseda University in 1982. In 1982, he joined Central Research Institute of Electric Power Industry (CRIEPI) as a Engineer. Between August 1988 and July 1989, he worked in Energy Systems Research Center at the University of Texas at Arlington as a Visiting Assistant Professor. Mr. Inoue is a Senior Research Engineer in Power System Department at CRIEPI and a member of the IEEE. Tatsumi Ichikawa was born in Tokyo, Japan on November 12,1945. He received M.S. degree in Electrical Engineering from Waseda University in 1970. In 1970, he joined Central Research Institute of Electric Power Industry (CRIEPI) as a Engineer. Between September 1979 and September 1980, he worked in Energy Systems Research Center at the University of Texas at Arlington as a Visiting Assistant Professor. His major research interests are nuclear plant dynamic simulations in power system analysis, and cooperative operations and controls of nuclear plants with power system operations. Mr. Ichikawa is a manager in Power System Department at CRIEPI and a member of the IEEE. Prabhashankar (Praba) Kundur received the M.A.Sc. and Ph.D. degrees from the University of Toronto, Canada in 1965 and 1967 respectively. In 1969, he joined Ontario Hydro where he is currently Manager of the Analytical Methods & Specialized Studies Department in the Power System Planning Division. He also holds the position of Adjunct Professor at the University of Toronto. Dr. Kundur was elected a Fellow of the IEEE in 1985 and a member of several IEEE working groups and task forces. Peter Hirsch received his B.Sc., M.Sc. and Ph.D. Degrees in Mathematics from the University of Wisconsin. From 1966 to 1992, he was a manager for advanced systems at the IBM Scientic Centers. He joined EPRI in 1992 and is the Manager of Power System Engineering in Power System Planning and Operation Rogram, Elecmcal System Division. He is responsible for formulating research strategies for power system engineering and directing the research contract work canying out these strategies. His current projects include the system tools for electrical system transmission and generation planning. 148 DISCUSSION RICHARD P. SCHULZ, (American Electric Power Service Corporation, Columbus, Ohio 4321 5): This is an excellent paper about an excellent piece of useful work. It is a necessary and reasonable development of modelling that meets some very specialized but important needs. These needs were identified at the time of the EPRl RP764-1 work which was completed in 1977. That work was very lightly funded; nine staff months were funded to make extensive programming changes in the DIOtotVDe LOTDYS code, to include three new models including the Boiling Water Reactor model and to document the prototype program. This model appears to be quite comprehensive and to meet the objectives for long-term simulations for severe power plant-electrical system transients. From the fact that a point kinetics model is used for presenting the nuclear core, with six groups of delayed neutrons, it would appear that a fairly short time step is required for adequate simulation; the estimate might be of the order of 0.1 seconds. What is the maximum time step that is allowable for use within this model? Are these models intended to use the unified transienthid-term/longterm program method devised by EPRl under RP1208? [AI If so, what provisions have been made for handling the prompt dynamics when the basic time step is increased to 1 .O second? The models clearly are not simple; this is reasonable to meet the goals. Could the authors please give us indications of the order of the models and of the number of data entries that are required? Is there an appropriate EPRl report which would have further details? It may be best to use these detailed models in studies of relatively small power system areas that are expected to undergo a significant event rather than using this model in large scale studies in the expectation of a large disturbance over the wider region, based upon principles of computing parsimony. Would the authors please comment on their intended applications both within Japan and the United States/EPRI area? [AI Frowd, R.J., Giri, J.C., Podmore, R., "Transient Stability and Long-Term Dynamics Unified", IEEE Transactions, Vol. PAS-101, No. 10, October 1982, pp. 3841-3850. Based on EPRl RP1208-7; Discussion by R. P. Schulz. Manuscripi received March 10, 1994 T. Inoue, T. ichikawa, P. Kundur and P. Hirsch: We would like to thank Mr. Schulz for his interest in our paper and for his valuable comments. The following are our responses to the specific questions he has raised. If an explicit numerical integration method such as Runge-Kutta is used, the maximum time step is in the order of 0.1 seconds. To increase the maximum step size, an implicit method such as the trapezoidal rule has to be used. The nuclear plant models, which were developed under a joint effort [E], have been implemented in both CRIEPl's and EPRl's long-term stability programs. The CRlEPl program uses implicit numerical integration method with variable time step. EPRl's Long Term Stability Program (LTSP) was developed based on the existing Extended TransienVMidterm Stability Program (ETMSP) [C] which has provision for using either an explicit method or an implicit method of numerical integration. Different step sizes are used for solving different equations associated with the nuclear plants and those associated with other dynamic devices. Typically the step size for plant dynamics is 10 times the step size for other dynamic devices. The order of the nuclear plant model for PWR is about 70, and the number of data entries is about 200. As for the model for BWR, the order is about 50 and the number of data entries is about 150. Technical details of the nuclear plant models are described in reference E. Power systems are becoming larger and more complex due to increased interconnections between electric utilities and due to the need for operating closer to stability limits. Severe faults that are not covered by normal design criteria may cause large transients in the interconnected system. In an extreme case, the system may split into islands. In islanded systems, the frequency and voltage deviation could be large which may lead to shutdown of nuclear generating units by unit protective systems normally not modeled in transient stability simulation. The nuclear plant models are developed mainly to simulate this type of situation and aid in the design and coordination of protection and controls. Modelling requirements for study of long-term power system dynamics are well described in reference D. [E] EPRl TR-101765, Research Project 3144-01, CRlEPl T989102-SL, Final Report, "Long-Term Dynamic Simulation : Nuclear and Thermal Power Plant Models (Joint EPRliCRlEPl Study)," Prepared by Ontario Hydro and Central Research Institute of Electric Power Industry, December 1992 (Licensable Material). [C] EPRl TR-103632, Vol.1, Research Project 3144-01, "Addition of Nuclear and Thermal Power Plant Models to Long Term Stability Program," Final Report, Prepared by Ontario Hydro, October 1993. [D] EPRl EL-6627, Research Project 2473-22, "Long-term Dynamic Simulation: Modeling Requirements," Final Report, Prepared by Ontario Hydro, December 1989. Manuscript received April 15, 1994.