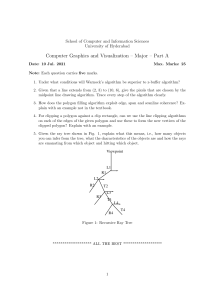
1. Classify the input device logically. Write in details.? 2. What are events? Explain its type in detail. 4. Explain all the concepts of three dimensional graphics. What are triggers Ans :- The trigger of a device is a physical input on the device with which the user can signal the computer. 5. Write the details of polygon table The polygon surface is specified with a set of vertex coordinates and associated attribute parameters. For each polygon input, the data are placed into tables that are to be used in the subsequent processing. Polygon data tables can be organized into two groups: Geometric tables and attribute tables. 6. Explain the quadtrees & octree. Ans:Octrees Octrees are hierarchical tree structures used to represent solid objects. Octrees are particularly useful in applications that require cross sectional views. Example medical applications. Octrees are based on a two-dimensional representation scheme called quadtree encoding. Quadtree encoding divides a square region of space into four equal areas until homogeneousregions are found. These regions can then be arranged in a tree. An octree takes the same approach as quadtrees, but divides a cube region of 3D space into octants. Each region within an octree is referred to as a volume element or voxel. Division is continued until homogeneous regions are discovered. Back Face Removal Algorithm It is used to plot only surfaces which will face the camera. The objects on the back side are not visible. This method will remove 50% of polygons from the scene if the parallel projection is used. If the perspective projection is used then more than 50% of the invisible area will be removed. The object is nearer to the center of projection, number of polygons from the back will be removed. It applies to individual objects. It does not consider the interaction between various objects. Many polygons are obscured by front faces, although they are closer to the viewer, so for removing such faces back face removal algorithm is used. When the projection is taken, any projector ray from the center of projection through viewing screen to object pieces object at two points, one is visible front surfaces, and another is not visible back surface. This algorithm acts a preprocessing step for another algorithm. The back face algorithm can be represented geometrically. Each polygon has several vertices. All vertices are numbered in clockwise. The normal M1 is generated a cross product of any two successive edge vectors. M1represent vector perpendicular to face and point outward from polyhedron surface. N1=(v2-v1 )(v3-v2) If N1.P≥0 visible N1.P<0 invisible. ii. Depth/Z buffer method Scan Line Algorithm Step1: Start Step2: Initialize the desired data structure 1. Create a polygon table having color, edge pointers, coefficients 2. Establish edge table contains information regarding, the endpoint of edges, pointer to polygon, inverse slope. 3. Create Active edge list. This will be sorted in increasing order of x. 4. Create a flag F. It will have two values either on or off. Step3: Perform the following steps for all scan lines 1. Enter values in Active edge list (AEL) in sorted order using y as value 2. Scan until the flag, i.e. F is on using a background color 3. When one polygon flag is on, and this is for surface S1enter color intensity as I1into refresh buffer 4. When two or image surface flag are on, sort the surfaces according to depth and use intensity value Sn for the nth surface. This surface will have least z depth value 5. Use the concept of coherence for remaining planes. Step4: Stop