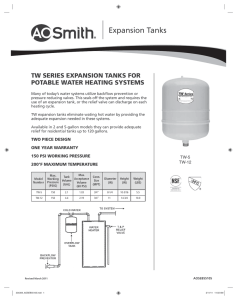
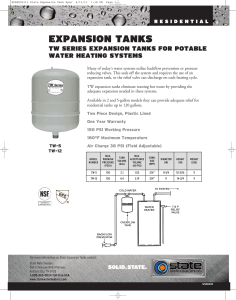
WRITTEN EXAM Course: Course code: Automatic Control R7003E Number of examination hours: Date of examination: 5 2022-01-13 Allowed aids: Calculator Mathematics book Beta Not allowed aids: The textbooks Lecture Solutions to problems on the lecture notes On duty teacher (complete telephone number): On duty teacher (complete telephone number): Khalid Atta +46 (0) 760 579 7 41 On duty teacher (complete telephone number): On duty teacher (complete telephone number): Grade scale: Number of questions and total score: 4/24 3 - 12 points 4 - 16 points 5 - 20 points Other information: General instructions Check that you have received all the exams/questions. All new answers begin on a separate page. Do not write on the back page. Print, write clearly, and do not use red pen. After examination Examination results will be announced within three weeks from the examination date and no later than two weeks before next re-examination. The exam result can be seen at My LTU – Ladok for students. Your corrected exam is scanned and visible on My LTU – Graded exams. Information to the printer Project number: 341980 Other information: Number of copies: 33 Number of pages: 3 Problem 1 (2 + 2 + 2 = 6 points) The linearized differential equations governing the fluid-flow dynamics for the two cascaded tanks in Fig. 1 are ∆ḣ1 + σ∆h1 = ∆u ∆ḣ2 + σ∆h2 = σ∆h1 where ∆h1 = deviation of depth in tank 1 from the nominal level, ∆h2 = deviation of depth in tank 2 from the nominal level, ∆u = deviation in fluid in flow rate to tank 1 (control). Figur 1: Coupled tanks for Problem Problem 1. a) Level Controller for Two Cascaded Tanks: Using state feedback of the form ∆u = −K1 ∆h1 − K2 ∆h2 , choose values of K1 and K2 that will place the closed-loop eigenvalues at s = −2σ(1 ± j). b) Level Estimator for Two Cascaded Tanks: Suppose that only the deviation in the level of tank 2 is measured (that is, y = ∆h2 ). Using this measurement, design an estimator that will give continuous, smooth estimates of the deviation in levels of tank 1 and tank 2 , with estimator error poles at −8σ(1 ± j). c) Estimator/Controller for Two Cascaded Tanks: Sketch a block diagram (showing individual integrators) of the closed-loop system obtained by combining the estimator of part (b) with the controller of part (a). Problem 2 (2 + 2 + 2 = 6 points) consider the following proper system: G(s) = s2 + 4s + 2 s2 + 2s + 1 (1) a) Write the continuous time state space and discretize it with sample time Ts = 1 seconds, 2 b) Design a deadbeat controller, c) Extend the controller to track a reference input r(t). Note that the transfer function is not strictly proper. In order to use the standard canonical forms, the transfer function should e proper. Hint: Long division can be used! Problem 3 (2 + 2 + 2 = 6 points) Explain the meaning of the following: a) Uncontrollable system. b) Non minimum phase system c) Asymptotic stability Problem 4 (2 + 2 + 2 = 6 points) The block diagram of a feedback system is shown in Fig. 2. The system state is x = and the dimensions of the matrices are as follows: A = n × n, L = n × 1 B = n × 1, x = 2n × 1 C = 1 × n, r = 1 × 1 K = 1 × n, y = 1 × 1 Figur 2: Block diagram for Problem Problem 4 a) Write state equations for the system. b) Let x = Tz, where I 0 T= I I Show that the system is not controllable. What does this mean? c) Find the transfer function of the system from r to y. 3 xp xf