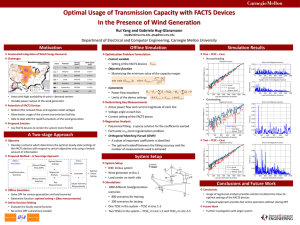
Influence of TCSC control systems on oscillations damping Cite as: AIP Conference Proceedings 2552, 040009 (2023); https://doi.org/10.1063/5.0112238 Published Online: 05 January 2023 Tokhir Makhmudov AIP Conference Proceedings 2552, 040009 (2023); https://doi.org/10.1063/5.0112238 © 2023 Author(s). 2552, 040009 Influence of TCSC Control Systems on Oscillations Damping Tokhir Makhmudov1, a) 1 Tashkent State Technical University, Power Plants, Networks and Systems Department, 100095 Tashkent, Uzbekistan a) Corresponding author: tox-05@yandex.com Abstract. In the world, special attention is paid to determining the stability margins of electrical systems in connection with the high growth rates of demand for electricity. In this regard, special attention is paid to research aimed at improving the stability and dynamic properties of electric power systems, including through the use of modern control methods based on intelligent systems. The application of HVDC and FACTS transmission technologies have added new control methods to the power system, increased the throughput of electrical networks, and improved monitoring capabilities. Power system stabilizers (PSS) are traditionally used to damp electromechanical low-frequency oscillations in the frequency range 0.2–1.5 Hz. This paper proposes the use of thyristor-controlled series capacitors (TCSC) control systems as a oscillations damper. For the compiled model of the POD-controller, a procedure was performed to optimize its parameters in order to minimize the deviation of the mutual load angle of the two power systems, and an algorithm for parametric optimization was presented. The simulation results on a digital model confirm the possibility of using TCSC regulators to suppress low-frequency oscillations in power systems. INTRODUCTION Serial compensation has been used successfully for many years in electrical networks. With the use of sequential compensation, it is possible to increase the transmission capacity of the existing transmission line with lower investment costs and in a shorter period of time compared to the construction of a new line. TCSC series compensation control circuits include controlled reactors connected in parallel with the capacitor bank sections. This combination allows for smooth regulation of capacitance in a fairly wide range [1]. TCSC controllable longitudinal compensation devices have some major advantages over their shunt counterparts. With series capacitors, the reactive power increases as the square of the line current, while with shunt capacitors, the reactive power is generated in proportion to the square of the bus voltage. To achieve the same systemic advantages as in series capacitors, it is necessary to use shunt capacitors whose rated reactive power is three to six times that of series capacitors [2]. In addition, bypass capacitors usually need to be connected at the midpoint of the line, while series capacitors do not. The use of thyristor control in series compensation devices potentially provides the following advantages [3-6]: 1. Continuous control of the level of serial compensation of the transmission line. 2. Dynamic power flow control in selected transmission lines in the network to ensure optimal conditions for power flow. 3. Damping of power swings from local and intersystem oscillations. 4. Increased level of protection of series capacitors. Fast shunting of series capacitors can be achieved by thyristor control when large overvoltages occur on the capacitors after emergency situations. Likewise, capacitors can be quickly re-enabled with thyristors after the fault has been rectified. 5. Maintaining the voltage level. TCSC devices in combination with series capacitors can generate reactive power, thereby helping to regulate the voltage level in the local network. Rudenko International Conference “Methodological Problems in Reliability Study of Large Energy Systems” (RSES 2021) AIP Conf. Proc. 2552, 040009-1–040009-6; https://doi.org/10.1063/5.0112238 Published by AIP Publishing. 978-0-7354-4307-5/$30.00 040009-1 6. Reduction of short-circuit current. During the passage of short-circuit currents, TCSCs can switch from variable capacitance mode to variable inductance mode, thereby limiting short-circuit currents. THE PRINCIPLE OF OPERATION OF TCSC Consider the operation of the TCSC by analyzing a circuit with variable inductance L, controlled by thyristors T1 and T2, connected in parallel with a fixed capacitor C, as shown in Fig. 1. Traditionally, thyristor converters are described using the firing/actuation anJOHĮDVWKHFRQWUROYDULDEOH>-9]. FIGURE 1. Functional diagram of the TCSC device. The equivalent impedance Zeq of this LC circuit is expressed as X C X L (D ) Z eq (D ) j X L (D ) X C 1 . (1) 1 ZL Here, WKHUHVLVWDQFHRIWKHIL[HGFDSDFLWRULVGHILQHGDVíM Ȧ& ,IȦ&– Ȧ/ !WKHQWKHFLUFXLWZLOOKDYHD capacitive character. ,IȦ&– Ȧ/ WKHSKHQRPHQRQRIYROWDJHUHVRQDQFHRFFXUVZKLFKOHDGVWRDQLQILQLWHHTXLYDOHQWFDSDFLWLYH reactance, and therefore to significant overvoltages. ,I Ȧ&– Ȧ/ WKHQ WKH UHDFWDQFH RI YDULDEOH LQGXFWDQFH EHJLQV WR SUHYDLO LQ WKH FLUFXLW 7KLV VLWXDWLRQ corresponds to the inductive operating mode of the TCSC. In Fig. 2 shows the waveforms associated with TCSC during steady state operation [10]. ZC FIGURE 2. Operation of TCSC in steady state. In this case, the thyristor switch-on intervals are significantly shorter than the half-period of the mains frequency, and they arise near the amplitude values of the power line current curve. In TCSC, all or part of the capacitor bank is equipped with parallel thyristors that transmit current pulses, then they are summed in phase with the line current to increase the voltage. Each thyristor is triggered once per cycle and has a conductance interval that is shorter than half the cycle of the rated mains frequency [11]. DAMPING OF POWER OSCILLATIONS The transmission of power P along the line with serial compensation is determined by the expression [12;13]: 040009-2 U1 U 2 sin G (2) X L X C (t ) Active power oscillations in transmission systems can occur in communication lines between generating facilities as a result of poor interconnection damping, especially during high power transmission. Such oscillations can be caused by a number of reasons, for example, line disconnection, line switching or sudden change in generator output power [14]. When the TCSC is properly controlled, the total transfer reactance changes over time so that the power oscillations are attenuated. In the POD (Power-Oscillation Damping) regulator, the input signals are local signals in the form of active power and voltage on the line at the connection point, as shown in Fig. 3. The output signal of the POD-regulator is the signal of the degree of compensation [15-17]. P(t ) FIGURE 3. Block diagram of the POD controller. The POD controller consists of an amplifier Kp, a transfer function with a time constant T1, designed to extract the variable component from the active power signal, which determines local oscillations, and filters with time constants T2-T4. Thus, the POD controller generates a signal proportional to the oscillatory component of the power flow, which is appropriately out of phase [18]. The filters are equipped with limiters for the Cmin and Cmax compensation signals to ensure that the POD dynamic control does not exceed the adjustable TCSC range. The Cmax limit corresponds to the maximum allowable voltage across the TCSC, and Cmin to the maximum power line impedance (inductive mode) [19]. RESULTS Let us consider the effect of a thyristor-controlled TCSC device, which acts as a damper for power oscillations using the example of an electric power system (EPS) shown in Fig. 4. FIGURE 4. EPS circuit with a sequential compensation device. Here, the first power system (EPS1) is adopted as the transmission system, and the second power system (EPS2) is received. A TCSC device is connected in series to the power line. In order to obtain transient characteristics, we will simulate an external disturbance, expressed in an increase in power flow towards the second power system, and then determine the set of coefficients of the TCSC controller that PLQLPL]HVWKHGHYLDWLRQRIWKHSKDVHDQJOHį12 į1–į2 between two EPSs. The initial and optimized values of the parameters of the POD controller are given in Table 1. Table 1. POD-controller parameter values. Parameter Value KP T1=T3 T2=T4 Cmax Cmin Initial 0,7 0.05 0.06 0.1 -0.1 Optimized 2 0.015 0.038 0.1 -0.1 The parameters of the POD controller were determined using parametric optimization, the block diagram of which is shown in Fig. 5. 040009-3 FIGURE 5. Block diagram of parametric optimization. The optimization procedure starts at preselected initial values of the POD controller parameters x0 = x0. Then the coefficients are adjusted using a nonlinear programming algorithm until the objective function f(x) reaches its global minimum. The parameters corresponding to this global minimum are optimal for the POD controller in the sense of the minimum objective function (3) min ^ f ( x : h( x) 0, g ( x) t 0` , where f(x) is the objective function; x is a vector containing the parameters of the POD controller; h(x) - constraints imposed by equalities; g(x) are inequality constraints. In this case, the objective function was set in the form: t1 f ( x) ¦ ³ G12 (t , x) G12 (0, x) dt 0 t1 ³ 'G (t , x)dt , (4) 0 ZKHUHį12 W[ LVWKHGLIIHUHQFHLQSKDVHDQJOHVDWWLPHWRIWZR(36VZLWKLQWHUV\VWHPFRPPXQLFDWLRQį12(0, x) is WKHLQLWLDOSKDVHDQJOHGLIIHUHQFHǻį W[ - change in the phase angle difference over time t; t1 is the observation time. The process of optimizing the parameters of the POD controller was carried out in the Response Optimization package of the MATLAB environment. In Fig. 6. shows the results of nonlinear mathematical modeling, showing a significant improvement in the damping of oscillations in the EPS. 040009-4 FIGURE 6. Results of nonlinear modelling: 1 - POD-controller without optimization; 2 - optimized POD-controller. Based on the obtained characteristics of transient processes 1 and 2, will evaluate the efficiency of the PODcontroller according to the following indicators [12, 15]: - Delay Time (td): The time required to reach the half of the final value. Note that delay time is the time till first reach is observed. - Peak Time (tp): The time required for the response to reach the first peak of the overshoot. - Settling Time (ts): The time required for the response to remain within a desired percentage (5%) of the final value. - Maximum (percent) Overshoot (Mp): The maximum peak value measured from the steady-state value. Table 2. Transient Response Specifications. Indicators of the quality of the transients Delay Time (td), sec. 1st characteristic 2nd characteristic 2,3 2,55 Peak Time (tp), sec. 3,2 3,8 Settling Time (ts), sec. Overshoot (Mp), % 10,2 50 9,2 61,5 From the above results, it is obvious that despite the increase in overshoot when using a POD-controller with optimized parameters, the damping of oscillations is improved, as evidenced by a decrease in the oscillation of the transient characteristic 2 and a decrease in its decay time. CONCLUSION Active power oscillations limit the capacity of intersystem connections between parts of power systems. In some cases, it is possible to install PSS system stabilizers on generators, especially with intersystem power oscillations that tend to be low frequency (typically 0.2 Hz to 0.7 Hz). In this case, series capacitors with thyristor control TCSC can be used to improve the characteristics of the power system, namely, to increase the stability margin, damping power oscillations, and reduce subsynchronous resonance. 040009-5 REFERENCES 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. M.Sh. Misrikhanov, V.F. Sitnikov and Yu.V. Sharov, “Optimal controllers based on FACTS devices intended for decentralized control of integrated large electrical power systems”, Russ. Electr. Eng., 79, 104-110, (2008). R. Mohan Mathur, K. Rajiv Varma, Thyristor-Based FACTS Controllers for Electrical Transmission Systems, 495, (2002). Priyanka Kathal, Arti Bhandakkar, “Power Flow Control in Power System using FACT Device Thyristor Controlled Series Capacitor (TCSC): A Review”, 2, International Journal of Science and Research, 388-395, (2013). Y. Wu and L. Li “Transfer capability study of tie-line installed TCSC considering transient stability constraints”, 2011 IEEE Pow. Eng. and Aut. Conf., 260-263, (2011). N. Ahmad Qurratulain, S. Hameed, A. Iqbal and K. Hasan, “Damping of power system oscillations using RCGA optimization based TCSC controller”, IEEE 7th Power India International Conference (PIICON), 1-6, (2016). Z. Mao J., “A new modeling and control scheme for thyristor-controlled series capacitor”, Control Theory Appl. 7, 81–86 (2009). Qian Liu, V. Vittal and N. Elia, “LPV supplementary damping controller design for a thyristor controlled series capacitor (TCSC) device”, IEEE Trans. on Pow. Sys., 21, 1242-1249, (2006). L.D. Colvara “The influence of the TCSC on power system transient energy”, IEEE Lat. Am. Trans., 3, 284289, (2005). T. Duong, Y. JianGang, & V. Truong, “Improving the transient stability-constrained optimal power flow with Thyristor Controlled Series Compensators”, Russ. Electr. Engin. 85, 777–784 (2014). C.W. Taylor, Power System Voltage Stability, 273, (1994). K. Allaev, T. Makhmudov, “Analysis of small oscillations of complex electrical systems”, Rudenko International Conference “Methodological problems in reliability study of large energy systems” (RSES 2020), E3S Web of Conferences 216, 01097, pp.1-4. F. Bizzarri, A. Brambilla and F. Milano, “Analytic and Numerical Study of TCSC Devices: Unveiling the Crucial Role of Phase-Locked Loops”, IEEE Trans. on Cir. and Sys., 65, 1840-1849, (2018). K. Allaev, T. Makhmudov, “Research of small oscillations of electrical power systems using the technology of embedding systems”, Electrical Engineering, 1, 309-319, (2020). Bjarne R. Andersen, L. Stig Nilsson Flexible AC Transmission Systems, 1117, (2020). M.S. Alam, M. Shafiullah, M.I. Hossain and M.N. Hasan, “Enhancement of power system damping employing TCSC with genetic algorithm based controller design”, 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), 1-5, (2015). T. Makhmudov, “The Invariance of Determination of the Complex Electrical System Output”, International Scientific Conference, Construction Mechanics, Hydraulics & Water Resources Engineering CONMECHYDRO – 2021, E3S Web of Conferences 264, 01024, pp. 1-9. X. Wu, P. Jiang, J. Lu and X. Zhao, Design of TCSC damping controller for SSO suppression based on TLSESPRIT, International Conference on Sustainable Power Generation and Supply (SUPERGEN 2012), 1-5, (2012). L. Angquist and C. Gama, “Damping algorithm based on phasor estimation”, 2001 IEEE Power Engineering Society Winter Meeting. Conference Proceedings (Cat. No.01CH37194), 1160-1165, (2001). M. Gupta, A.K. Gupta, & N.K. Sharma, A “Comparative Study of Series Compensation, TCPAR and TCSR FACTS Controllers for Mitigation of Congestion”, J. Inst. Eng. India Ser. B 101, 717–728 (2020). 040009-6