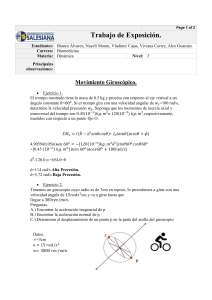
Solucionarlo de dinámica Dinámica Instituto Politécnico Nacional (IPN) 125 pag. Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 1 PROBLEMAS SOBRE CINEMATICA DE UNA PARTICULA Y 1-1.- El perno B del cigüeñal AB de radio r = 0.1 m se está moviendo en la ranura del brazo OC en la figura. Si en el instante dado: = 0.24 m, = 30°, = 4 rad/seg y = - 2 rad/seg2. Usando coordenadas cartesianas, calcular la velocidad y aceleración del perno B. X A r P1-1 Solución 1).- Por intersección de trayectorias (ver figura P1-1a): P1-1a X 2 Y 2 r2 (1) Y b mX 0.24 cot X (2) 2).- Derivando dos veces, con respecto al tiempo (1) y (2): XX YY 0 (3) Y csc 2 X cot X (4) X 2 XX Y 2 YY 2 0 (5) Y 2 csc 2 cot 2 X csc 2 X csc 2 X csc 2 X cot X (6) 3).- Para el caso específico de X = 0.1 sen30° = 0.05 m, Y = -0.1cos30° = -0.0866 m y = 8.702°.(4) en (3): XX Y csc 2 X cot X 0 → X X Y cot Y csc 2 X Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 2 _____________________________________________________________________ Y csc 2 X 0.0866 * 43.683 * 4 * 0.05 X 1.229 m/seg X cot Y 0.05 6.534 * 0.0866 En (4): Y 43.687 * 4 * 0.05 6.534 *1.229 0.707 m/seg VB 1.229 i 0.707 j (m/seg) → VB 1.42 m/seg (6) en (5): X X Y cot Y csc2 2cot 2 X X 2 X X 2 Y 2 0.0866 * 43.687 2 * 6.534 *16 * 0.05 2 * 0.05 2 * 4 *1.229 2.016 X 0.05 0.0866 * 6.534 X 7.71 m/seg2 En (6): Y 43.687 2*6.534*16*0.05 2*0.05 2*4*1.229 6.534*7.71 Y 18.82 m/seg2 aB 7.71 i 18.82 j m/seg2 → P Y aB 20.34 m/seg2 1-2.- El perno P en un mecanismo será empujado hacia la derecha con una velocidad constante V = 2 m/seg. Usando coordenadas cartesianas, calcule la velocidad angular y la aceleración angular del brazo OA para = 30°, si = 0.7 m. Solución 1).- Cálculo del movimiento de P tomando como punto de referencia a O y aprovechando que es constante: X P1-2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ Si: tg X X tg 3 (1) Derivando dos veces (1), respecto al tiempo: X tg X sec 2 0 X sen cos X (2) X tg X sec 2 X sec 2 X * 2 sec 2 tg 2 X sec 2 0 2 X sec 2 2 X sec 2 tg 2 X sec 2 2) Para el caso específico de = 30°, X tg 30 0.7 X (3) V 2 m/seg y X 0 : X 1.21 m En (2): 2sen30 cos 30 0.72 rad/seg 1.21 En (3): 2 * 2 sec 1.78 2 30 * 0.72 2 *1.21sec 2 30tg 30 * 0.72 2 1.21 * sec 2 30 rad/seg2 1-3.- El movimiento tridimensional de una partícula está definida por el vector posición r R sen pt i Ct j R cos pt k . La curva descrita en el espacio por la partícula es un hélice. Determine el radio de curvatura de dicha hélice. Solución Si: 1 C rxr 3 r Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 4 _____________________________________________________________________ r Rp cos pt i C j Rpsenpt k r R 2 p 2 cos 2 pt sen 2 pt C 2 1 2 R2 p2 C 2 1 2 r Rp 2 senpt i Rp 2 cos pt k i Rp cos pt j C k R psenpt Rp senpt 0 Rp cos pt r x r 2 2 2 2 3 2 2 3 2 2 r x r CRp cos pt i R p sen pt R p cos pt j CRp senptk 1 C 1 C rxr 3 r C 2 R 2 p 4 cos 2 pt R4 p6 3 R2 p2 C 2 R 2 p 2 C 2 p4R2 R2 p2 C 2 R C 2 p2 C 2 3 p2R p2R2 C 2 3 C 2 R 2 p 4 sen 2 pt 3 R 2 p 2 C 2 1 2 C2 p2R2 C 2 (Unid. de longitud) R p2R p2R 1-4.- Si la velocidad angular AC = 5 °/seg y la aceleración angular AC = - 2°/seg2. Usando coordenada tangencial y normal y/o polar, determine la aceleración angular del actuador hidráulico BC y la razón de cambio de su razón de extensión. et e P1-4 eo Solución 1).- Orientación de los vectores unitarios, que definen las coordenadas pedidas (ver figura P1-4a): en rAC 2.4 2 2.6 2 3.54 m P1-4a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ BC 2.683 5 m 63.43 , 42.71 y 20.72 2).- Cálculo del movimiento de C tomando como punto de referencia A en coordenadas tangencial y normal: VC AC rAC et 5 * 180 * 3.54 et 0.309 et (1) 2 aC AC rAC et AC rAC en 2 * * 3.54 et 5 * * 3.54 en 180 180 2 aC 0.124 et 0.027 en (m/seg) (2) 3).- Cálculo del movimiento de C tomando como punto de referencia B, en coordenadas polares, para luego transformarle en tangencial y normal: e sen et cos en y e cos et sen en a).- Cálculo de la velocidad angular de BC y su razón de extensión: VC BC e BC e VC BC sen et cos en BCcos et sen en VC BC sen BC cos et BC sen BC cos en (3) (1)= (3) e igualando componentes: 0 BC 0.309 (4) + (5) sen BC cos * sen BC (4) cos BC sen * cos (5) 0.309 cos BC 0.309 cos 20.72 0.1077 rad/seg 6.172 °/seg 2.683 En (4): Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 6 _____________________________________________________________________ BC BCtg 2.683 * 0.1077 tg 20.72 0.109 m/seg b).- Cálculo de la aceleración angular de BC y la razón de cambio de su razón de extensión: aC BC BC 2 e 2 BC BC e aC BC BC 2 sen et cos en 2 BC BC cos et sen en aC BC BC 2 sen 2 BC BC cos et 2 cos 2 sen e BC BC BC BC (6) n (2)= (6) e igualando componentes: 0.124 0.027 sen * sen BC BC 2 sen 2 BC BC cos * cos BC BC 2 cos 2 BC BC (7) (8) (7) + (8): 0.027sen 0.124 cos 2 BC BC 0.027 sen20.72 0.124 cos 20.72 2 * 0.109 * 0.1077 2.683 0.0484 rad/seg2 2.77 °/seg2 En (7): BC BC 2 sen 0.124 2 BC BC cos sen BC 2.683 * 0.1077 2 sen20.72 0.124 2 * 0.109 * 0.1077 2.683 * 0.0484 cos 20.72 sen20.72 BC 0.0381 m/seg2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 7 1-5.- El brazo BC gira en sentido horario a 200 RPM, el perno C en el extremo de este brazo desliza en la ranura del elemento AD. Usando coordenadas tangencial y normal y/o polares, calcule = 30°. e y para r = 7 in .9 8 º et 17 60º C eo en 3.5" Solución 1).- Direcciones de los vectores unitarios, que definen las coordenadas tangencial y normal, y polar (ver figura P-5a): 15" 2).- Cálculo de la velocidad y aceleración de C, tomando como punto base B y usando coordenadas tangencial y normal: 77.98º VCc r et 200 * * 7 et 30 VCc 146.6 et (plg/seg) A P1-5a aC P1-5 B 3.94" 6.06" 2 0 20 r et 2 r en * 7 en 3070.54 en (plg/seg2) 3 (1) (2) 3).- Cálculo de la velocidad y aceleración de C, tomando como punto base A y usando coordenadas polares: VC e e e 18.92 e (3) aC 2 e 2 e 18.92 2 e 2 e (4) 4).- Ecuaciones de compatibilidad: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 8 _____________________________________________________________________ a).- Si: (1) = (3), transformamos et y en en e y e , para luego igualar componentes: et cos 17.98 e sen17.98 0.95 e 0.309 e en sen17.98 e cos 17.98 0.309 e 0.95 e Luego: 146.6 0.95 e 0.309 e e 18.92 e 139.25 plg/seg y 2.39 b).- Si: (2) = (4), transformamos et y rad/seg en en e y e , para luego igualar las componentes transversales: 3070.54 0.308 e 0.95e 18.92 2 e 2 *139.25 * 2.39 18.92 e 3070.54 * 0.95 665.615 18.92 118.996 119 rad/seg2 1-6.- La rueda de la figura gira en sentido horario con frecuencia constante de 120 RPM. El pasador D está fijo a la rueda en un punto situado a 125 mm de su centro y desliza por la guía en el brazo AB. Usando Coordenadas tangencial y normal y/o polares, determine la velocidad angular AB y la aceleración angular AB del brazo AB en el instante representado. Solución 1).- Orientación de los vectores unitarios que definen las coordenadas polar, tangencial y normal (ver figura P-6a): P1-6 eo et 10 30º .9º et cos 10.9 e sen10.9 e e et 0.982 e 0.19 e 60º 5 0.108 12 0. 0.33 en en sen10.9 e cos 10.9 e 60º 19.10º 0.3125 P1-6a 0.0625 en 0.19 e 0.982 e Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 9 2).- Cálculo del movimiento de D, tomando como punto de referencia C en : VC r et 120 * 30 * 0.125 et 1.57 et 1.542 e 0.3 e (m/seg) (1) aC 2 r en 19.74 en 3.75 e 19.385 e (m/seg2) (2) 3).- Cálculo del movimiento de D, tomando como punto de referencia A en : VC e e e 0.33 AB e (3) (1)= (3): 1.542 m/seg AB y 0.3 0.9 rad/seg 0.33 aC 2 e 2 e (4) (2)= (4): a 2 *1.542 * 0.9 0.33 AB 19.385 AB 67.15 rad/seg2 1-7.- El mecanismo de ginebra de un contador mecánico convierte en movimiento de rotación constante de la rueda de R = 50 mm, en un movimiento de rotación intermitente de la rueda . El perno C está montado en y desliza en la ranura de la rueda . Usando coordenadas tangencial y normal y/o polares, calcule la velocidad y aceleración angulares de la rueda , para = 30° con la rueda girando a 100 RPM en sentido horario. R θ A P1-7 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 10 _____________________________________________________________________ Solución 1).- Orientación de los ejes que definen las coordenadas tangencial y normal, y del polar escogido, además cálculos elementales (ver figura P1-7a): C B A P1-7a a).- Cálculo de ρ, para θ = 30ª, por la ley de cósenos (ver figura P1-7b): 2 0.05 2 0.05 2 2 * 0.05 * 0.05 2 cos 30 m 2 ρ = 37.1 mm ρ = 0.0371 m de por ley de senos: b).- Cálculo sen sen30 sen 0.67385 50 37.1 m P1-7b 42.4 c).- Orientación de los vectores unitarios e y e en et y en : e cos 17.6 et sen17.6 en e 0.953 et 0.302 en e sen17.6 et cos 17.6 en e 0.302 et 0.953 en P1-7c Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 11 2).- Cálculo de la velocidad y aceleración de C, tomando como punto base A y usando coordenadas tangencial y normal: VC r et 100 * 30 * 0.05 et 0.524 et (m/seg) (1) aC r en 10 * 0.05 en 5.483 en (m/seg2) 3 2 2 (2) 3).- Cálculo de la velocidad y aceleración de C, tomando como punto base B y usando coordenadas polares: VC e e e 0.0371 e VC 0.953 et 0.302 en 0.0371 0.302 et 0.953 en VC 0.953 0.0112 et 0.302 0.0353 en (3) (1)= (3), igualando componentes y operando: 0.953 0.0112 0.524 * 0.302 0.302 0.0353 0 * 0.953 0.037 0.158 → 4.27 rad/seg También: 0.302 0.0353 * 4.27 0 0.499 m/seg aC 2 e 2 e aC 2 0.953 et 0.302 en 2 0.302 et 0.953 en aC 2 * 0.953 2 * 0.302 et 2 * 0.302 2 * 0.953 e (4) n Si: (2) = (4), igualando componentes y operando: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 12 _____________________________________________________________________ 0.05 * 4.27 * 0.953 2 0.499 4.27 0.05* 0.302 0 2 * 0.953 2 * 0.302 0 2 0.953 0.0151 0.4182 (5) 0.05 * 4.27 * 0.302 2 0.499 4.27 0.05* 0.953 5.483 2 0.302 0.0477 9.82 (6) 0.302 x (5) + 0.953 x (6): 0.05 9.485 189.7 rad/seg2 189.7 rad/seg2 (Horario) 1-8.- El brazo telescópico AB se emplea para situar al operario a la altura de los cables, eléctricos y de teléfono. Si la longitud AB aumente a una velocidad constante (d /dt) = 0.20 m/seg y el brazo gira a una velocidad angular constante 1 = 0.25 rad/seg respecto al eje vertical., mientras que el ángulo que forma con la horizontal mantiene un valor constante. Usando coordenadas esféricas, determínese la aceleración del punto B, cuando = 5 m. ω1 B A e B e P1-8 e Solución 1).- Orientación de los vectores unitarios que definen las coordenadas esféricas (ver figura P1-8a): 2).- Identificación de los parámetros que definen el movimiento: A P1-8a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ r 5m r 0.2 m / seg r 0 60 0.25 rad / seg 0 0 13 0 3).- Cálculo de la aceleración de B: 0 0 0 0 0 2r cos r r 2 2r r e e e aB r 0 r 2 sen 2 r 2 sen cos 2rsen rsen a B 5 * 0.25 2 sen 2 60er 5 * 0.25 2 sen60 cos 60e 2 * 0.2 * 0.25sen60e a B 0.234 er 0.135 e 0.0866 e a B 0.284 m/seg2 1-9.- La varilla AB uniforme de longitud (ver figura P1-9) cuelga libremente del soporte A en la cara inferior del disco . El disco gira alrededor de un eje vertical con velocidad angular constante = 2 rad/seg. Si aumenta a razón y este a = 0.1 rad/seg2. Usando coordenadas cilíndricas, calcule la velocidad y aceleración de B, para = 60°, conociendo = 40 cm, b = /4 y para = 0°, =0 rad/seg. P1-9 Solución 1).- Orientación de los vectores unitarios que definen las coordenadas cilíndricas (ver figura P19a): 2).- Cálculo de la velocidad angular de AB, velocidad y aceleración de B en , para = 60° : d d * dt d 2 0.1 * 3 2 0 3 d d 0 eZ et e en e P1-9a 0.46 rad/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 14 _____________________________________________________________________ VB 0.184 m/seg a B et 2 en 0.04 et 0.085 en (m/seg2) 3).- Identificación de los parámetros que definen el movimiento en coordenadas cilíndricas: sen60 0.1 0.446 m VB cos 60 0.092 m / seg 2 rad / seg 0 at cos 60 a n cos 30 0.054 m / seg 2 Z VB sen60 0.159 m / seg Z a sen60 a sen30 0.0598 m / seg 2 t n 4).- Cálculo de la velocidad y aceleración de B en el marco inercial tierra: VB e e Z eZ 0.092 e 0.446 * 2 e 0.159 eZ VB 0.092 e 0.892 e 0.159 eZ (m/seg) VB 0.911 m/seg a B 0.054 0.446 * 4 e 2 * 0.092 * 2 e 0.0598 eZ a B 1.838 e 0.368 e 0.0598 eZ (m/seg2) a B 1.875 m/seg2 1-10.- Un tubo acodado ABC gira a la velocidad angular 1 = 5 rad/seg, decreciendo a razón de 1 = 1 rad/seg2. Sabiendo que una bola de cojinete D se mueve por su interior hacia el extremo C con una celeridad relativa v = 1.5 m/seg, decreciendo a una razón de 0.5 m/seg2. Usando coordenadas cilíndricas, para la posición mostrada, hallar la velocidad y aceleración de D. P1-10 Solución 1).- Orientación de los vectores unitarios que definen las coordenadas cilíndricas (ver figura P1-10a) e identificación de los parámetros que definen el movimiento: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 1 2 tg 26.57 15 A 1 5 rad / seg 0.1 m vsen 0.671 m / seg B 1 1 rad / seg 2 asen 0.224 m / seg 2 X v cos 1.342 m / seg X a cos 0.447 m / seg 2 2).- Cálculo de la velocidad y aceleración de D en : D VD er e X e X 0.671 e 0.1* 5 e 1.342 e X VD 0.671 e 0.5 e 1.342 e X (m/seg) e VD 1.582 m/seg eX e P1-10a a D 2 e 2 e X e X a D 0.224 0.1* 25 e 2 * 0.671* 5 0.1*1 e 0.447 e X a D 2.724 e 6.61 e 0.447 e X (m/seg2) a D 7.167 m/seg2 M M 1-11.- Un motor M y una barra AB tienen movimientos angulares (todas antihorarias) M = 5 rad/seg, AB M = 2 rad/seg , AB = 3 rad/seg y 2 M 2 = 1 rad/seg . Un collarín C sobre la barra AB M se desliza a 0.25 m de A y se está moviendo hacia abajo a lo largo de la barra con una velocidad de 3 m/seg y una aceleración de 2 m/seg2. Determínese la velocidad y aceleración de C en este instante: a) con respecto al disco , usando coordenadas cilíndricas en M y b) con respecto al marco inercial , usando coordenadas cartesianas. AB M AB M P1-11 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 16 _____________________________________________________________________ O A Solución 1).- Orientación de los vectores unitarios que definen las coordenadas cilíndricas en M (ver figura P1-11a): e C eZ 2).- Movimiento de C respecto al marco móvil motor M o al disco (están ligados), utilizando coordenadas cilíndricas (polares), para el instante e indicado (donde e k y e j ): P1-11a VC VC aC aC M M M M VC e e 3 e 0.25 * 3 e VC 3 e 0.75 e (m/seg) → V 0.75 j 3 k m/seg CM 2 e 2 e 2 0.25 * 9 e 2 * 3 * 3 0.25 *1 e aC 0.25 e 18.5 e (m/seg2) aC 18.5 j 0.25 k m/seg2 M 3).- Movimiento del marco móvil motor M (ligado a ) y del punto conveniente o base A : M 5 k (rad/seg) y M 2 k (rad/seg2) V A M x r0 A 5 k x 2 i 10 j (m/seg) a A M x r0 A M2 r0 A 2 k x 2 i 252 i 50 i 4 j (m/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 17 4).- Movimiento de C respecto al marco inercial : VC VC VA M x rAC 10 j 0.75 j 3 k 5 k x 0.25 k M VC 10.75 j 3 k (m/seg) aC aC aC 2 M x VC 0 x r M M AC M 0 x M x rAC 2 M x VC M 10 k x 0.75 j 3 k 7.5 i (m/seg2) M aC 50 i 4 j 18.5 j 0.25 k 7.5 i aC 57.5 i 22.5 j 0.25 k (m/seg2) 1-12.- La barra curva en la figura gira alrededor de la vertical a = 2 rad/seg. En centro C del collarín tiene velocidad y aceleración relativos a de 20 e plg/seg y –10 e plg/seg2 respectivamente; e tiene la dirección de la velocidad de C en . Usando coordenadas esféricas, para el instante dado, calcule la velocidad y aceleración de C en el marco en el que gira . er e e ee r P1-12 Solución o 1).- Orientación de los vectores unitarios de la coordenada esférica (ver figura P1-12a) e identificación de los parámetros que definen el movimiento: P1-12a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 18 _____________________________________________________________________ 2 rad / seg r 5 p lg 30 r 0 r 0 20 4 rad / seg 5 0 10 2 rad / seg 2 5 2).- Cálculo de la velocidad y aceleración de C en : VC 0 r er r e rsen e 5 * 4 e 5 * 2 sen30 e VC 20 e 15.71 e (plg/seg) VC 25.43 plg/seg aC r 2 r 2 sen 2 er r r 2 sen cos e 2r cos e aC 129.35 er 95.53 e 217.8 e (plg/seg2) aC 270.73 plg/seg2 1-13.- La barra doblada gira a una velocidad angular constante 1 = 4 rad/seg. Sabiendo que el collarín D se desplaza hacia abajo a lo largo de ella con velocidad constante relativa u = 65 plg/seg, para la posición mostrada en la figura, determine usando coordenadas cilíndricas, la velocidad y aceleración de D. A D Solución 1).- Orientación de los vectores unitarios que definen las coordenadas cilíndricas (ver figura P113a) e identificación de los parámetros, que definen el movimiento: P1-13 B C Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 5.5 p lg 25 p lg/ seg 0 19 4 rad / seg Z 60 pls / seg 0 Z 0 3).- Cálculo de la velocidad y aceleración de D: VD e e Z eZ 25 e 5.5 * 4 e 60 eZ VD 25 e 22 e 60 eZ (plg/seg) VD 68.62 plg/seg P1-13a a D 2 e 2 e 5.5 *16 e 2 * 25 * 4 e a D 88 e 200 e (plg/seg2) a D 218.5 plg/seg2 1-14.- El movimiento del pasador “P” está guiado por la ranura de las barra AE y BD. Sabiendo que las barra giran con velocidades angulares antihorarias constantes AE = 4 rad/seg y BD = 5 rad/seg. Determine, para la posición indicada: a) usando coordenadas polares, la velocidad del pasador P y b) el radio de curvatura de la trayectoria de P. Solución 1).- Para la parte a) utilizaremos coordenadas polares. a).- Orientación de los vectores unitarios que definen las coordenadas polares: P1-14 0.25 m A 1 0.289 m y 2 0.144 B m 60º e1 sen30 e 2 cos 30 e 2 e e 1 cos 30 e 2 sen30 e 2 P e b).- Cálculo de la velocidad de P: i).- Tomando como punto de referencia a A: 60º e e P1-14a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 20 _____________________________________________________________________ VP 1 e1 11 e 1 VP 1 sen30 e 2 cos 30 e 2 0.289 * 4 cos 30 e 2 sen30 e 2 VP 1 sen30 1.156 cos 30 e 2 1 cos 30 1.156sen30 e 2 (1) ii).- Tomando como punto de referencia a B: VP 2 e 2 22 e 2 2 e 2 0.144 * 5 e 2 VP 2 e 2 0.72 e 2 (2) (1) = (2) e igualando componentes: 1 cos 30 1.156sen30 0.72 1 0.164 m/seg En (1): VP 0.164 e1 1.156 e 1 (m/seg) → VP 1.168 m/seg 2).- Para encontrar el radio de curvatura utilizaremos movimientos en marcos móviles.Si: P’ a AE y P’’ a BD, ambos coincidentes con P y sabiendo que: 1 C VP x a P Y 3 VP X a).- Cálculo de la velocidad de P en : i).- Velocidad de P, tomando como punto de referencia A en : VP VP ' VP AE VP 4 k x0.25 i 0.144 j VP AE sen60 i cos 60 j VP 0.576 0.866 VP i 1 0.5 VP j AE AE (3) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 21 ii).- Velocidad de P, tomando como punto de referencia B en : VP VP '' VP BD VP 0.72 i VP 5 k x 0.144 j VP j BD j (4) BD (3) = (4) e igualando componentes: 0.576 0.866 VP 0.72 AE 1 0.5 * 0.166 VP VP BD 0.166 m/seg AE VP 0.917 m/seg BD Luego: VP AE 0.1660.866 i 0.5 j (m/seg) y VP 0.917 j (m/seg) BD En (4): VP 0.72 i 0.917 j (m/seg) b).- Cálculo de la aceleración de P en .i).- Aceleración de P, tomando como punto de referencia A en : a P a P ' 2 AE x VP AE aP AE 2 a P ' AE rAP 160.25 i 0.144 j 4 i 2.304 j (m/seg2) 2 AE x VP aP AE AE aP AE 8 k x 0.1660.866 i 0.5 j 0.664 i 1.15 j (m/seg2) 0.866 i 0.5 j 0.866 a P AE i 0.5 a P j (m/seg2) AE Luego: a P 4 0.664 0.866 a P i 2.304 1.15 0.5 a P j AE AE Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 22 _____________________________________________________________________ a P 0.866 a P 3.336 i 3.454 0.5 a P j (m/seg2) AE AE (5) ii).- Aceleración de P, tomando como punto de referencia B en : a P a P '' 2 BD x VP BD aP BD 2 a P '' BD rBP 25 0.144 j 3.6 j (m/seg2) 2 BD x VP aP 10 k x 0.917 j 9.17 i (m/seg2) BD aP BD j (m/seg2) BD Luego: a P 9.17 i 3.6 a P j BD (m/seg2) (6) (5) = (6) e igualando componentes: 0.866 a P 3.336 9.17 AE 3.454 0.5 6.74 3.6 a P BD aP 6.74 m/seg2 AE aP 3.224 m/seg2 BD En (6): a P 9.17 i 6.824 j (m/seg2) c).- Cálculo del radio de curvatura: VP x a P .72 i 0.917 j x 9.17 i 6.824 j 13.31 k (m2/seg3 ) 3 VP 1.585 (m3/seg3 ) Luego: 1 C VP x a P 3 VP 13.31 8.397 → C 0.119 m → 1.581 C 119 mm Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 1-15.- Ciertos productos manufacturados se pintan con un rociador al pasar por una estación de trabajo que se muestra. Sabiendo que el tubo doblado ACE gira a una velocidad angular constante 1 = 0.4 rad/seg y la partícula D de la pintura se mueve con respecto al tubo con una velocidad constante u = 150 mm/seg. Usando coordenadas cilíndricas y esféricas, para la posición mostrada, determínese la velocidad y aceleración de D. 23 P1-15 Solución 1).- Usando coordenadas cilíndricas.a).- Orientación de los vectores unitarios, que definen las coordenadas cilíndricas (ver figura P1-15a) e identificación de los parámetros, que definen el movimiento: e u e D ex an C 0.25 m 60 E o F P1-15a 0.25sen60 0.217 m 1 X 0.15 cos 30 0.13 m / seg usen30 0.075 m / seg 1 0.4 rad / seg 2 u2 cos 30 r 0.078 m / seg 2 0 u X sen30 0.045 m / seg 2 r b).- Cálculo de la velocidad y aceleración de D: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 24 _____________________________________________________________________ VD e e X e X 0.075 e 0.217 * 0.4 e 0.13 e X VD 0.1734 m/seg VD 0.075 e 0.0868 e 0.13 e X (m/seg) 0 2 a D e 2 e X e X a D 0.078 0.035 e 0.06 e 0.045 e X a D 0.113 e 0.06 e 0.045 e X (m/seg2) a D 0.136 m/seg2 2).- Usando coordenadas esféricas.- er e a).- Orientación de los vectores unitarios, que definen las coordenadas esféricas (ver figura P115b) e identificación de los parámetros, que definen el movimiento en coordenadas esféricas: e r 0.25 m 60 0.6 rad / seg r 0 r 0 0 0.4 rad / seg P1-15b 0 b).- Cálculo de la velocidad y aceleración de D: VD r er r e r sen e 0.25 * 0.6 e 0.25 * 0.4 sen60 e VD 0.15 e 0.0866 e (m/seg) VD 0.1732 m/seg a D r 2 r 2 sen 2 er r 2 sen cos e 2r cos e a D 0.25 * 0.6 2 0.25 * 0.4 2 sen 2 60 er 0.25 * 0.4 2 sen 60 cos 60 e 2 * 0.25 * 0.6 * 0.4 cos 60 e Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ a D 0.12 er 0.0173 e 0.06 e (m/seg2) → 25 a D 0.1353 m/seg2 1-16.- Considere la situación de tránsito aéreo de la figura. El avión de control A vuela con velocidad constante VA en un patrón circular a una altura h = 15000 pies, mientras que otro avión B vuela a una altura = 8000 pies. Suponga que B y C están en el plano XY como se indica. Calcule r y r para V A = -300 i (pies/seg), V B = - 600 k (pies/seg), R’ = 5000 pies y d = 9000 pies. . R’ r Solución 1).- Movimiento del marco móvil A y del punto base A: h 0 R 15000 j (pies) d R 300 i (pie/seg) 2 300 R en 18 k (pie/seg2) 500 P1-16 2).- Movimiento de B respecto a A: 9000 i 7000 j ? y (pies) ? 3).- Movimiento de B respecto al marco inercial tierra: 0 VB R x 600 k 300 i r 670.82 300 i 600 k (pie/seg) pie/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 26 _____________________________________________________________________ 0 0 0 0 a B R x x x 2 x 0 18 k 18 k (pie/seg2) → r 18 pie/seg2 1-17.- La barra AD está doblada en forma de un arco de circunferencia de radio b = 150 mm/seg. La posición de la barra se controla mediante el pasador B que desliza en la ranura horizontal y también a lo largo de la barra. Sabiendo que para = 90° el pasador B se mueve a la derecha con una velocidad constante de 75 mm/seg, determínese la velocidad y aceleración angulares de la barra. C P1-17 Solución 1).- Cálculo de la velocidad angular de la barra doblada: Si: Q a y coincide con B VB VB VQ (1) Donde: VB 0.075 i (m/seg) VB VB 0.15 2 VB 2 i j (m/seg) 2 P1-17a VQ k x 0.15 2 i 0.15 2 j m/seg Luego en (1): 0.075 i VB 2 i j 0.15 2 j 2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 27 Igualando componentes y operando: VB 2 0.075 2 0 VB VB 0.106 m/seg 2 0.15 2 2 0.075 0.15 2 VB 2 0.15 2 2 0.354 rad/seg 2).- Cálculo de la aceleración angular de la barra doblada: a B a B aQ 2 x VB Si: aB 0 aB VB2 C 2 i j at 2 i j 2 2 aQ k x 0.15 2 i 2 0.15 2 i 0.15 2 j 0.15 2 2 i 2 x VB 0.708k x 0.106 2 i j 0.053i j 2 Luego: 2 at 7.945 x10 3 0 2 0.0265 0.053 2 7.945 x10 3 at 2 j i 0.15 2 0.053 Igualando componentes y operando: 0 at 2 0.0185 2 at 0.0262 m/seg2 0 0.045 0.0185 0.212 0.1253 rad/seg2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 28 _____________________________________________________________________ 1-18.- La barra eje β de 5 plg de longitud en la figura gira en el gozne a 1 = 3 rad/seg en el sentido indicado. La rueda gira simultáneamente a 2 = 2 rad/seg alrededor de su eje como se indica; ambas rapideces son constantes. El insecto se desplaza hacia adentro sobre un rayo de la rueda a 0.2 plg/seg y aumentando a razón de 0.1 plg/seg2, ambas magnitudes con relación al rayo. Para el instante mostrado, encuentre: a) la velocidad angular de la rueda y b) la aceleración del insecto. ω1 O C ω2 I Solución 1).- Movimiento del marco móvil rueda y del punto base C: 2 i 3 k (rad/seg) x 3 k x 2 i 6 j P1-18 (rad/seg2) VC x rOC 3 k x 5 i 15 j (plg/seg) aC x x rOC → aC 3 k x 15 j 45 i (plg/seg2) 2).- Movimiento del insecto I respecto a la rueda : rCI k (plg) , V I 0.2 k (plg/seg) y a I 0.1 k (plg/seg2) 3).- Movimiento del insecto I en el marco : V I VC x rC I V I 15 j 2 i 3 k x k 0.2 k V I 17 j 0.2 k (plg/seg) VI 17.001 plg/seg a I aC x rC I x x rCI 2 x V I a I x rC I 6 j x k 6 i (plg/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ x x rC I 2 i 3 k x 2 j 6 i 4 k 29 (plg/seg2) 2 x V I 4 i 6 k x 0.2 k 0.8 j (plg/seg2) a I 45 6 6 i 0.8 j 0.1 4 k a I 57 i 0.8 j 4.1 k (plg/seg2) aC 57.15 plg/seg2 1-19.- La grúa en la figura gira alrededor de la vertical con V = 0.2 rad/seg constante y simultáneamente un aguilón de 50 pies de longitud se levanta con rapidez creciente H = 0.1 t rad/seg. Los ejes (x,y,z) están fijos a la grúa en O y el aguilón tiene la dirección del eje “y” cuando t = 0. Halle, cuando el aguilón forma un ángulo de 60° con la horizontal: a) y y b) usando coordenadas esféricas en , γ VP y y aP . P1-19 Solución 1).- Cálculo del movimiento angular de : H V x 0 d 0.1 t dt (2) a).- Cálculo del movimiento angular de H (1) 3 0 H t en γ = 60°: d 0.1 t dt 0 → 3 0.05 t 2 t 4.58 seg Luego: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 30 _____________________________________________________________________ H 0.458 rad/seg y H 0.1 rad/seg2 b).- Cálculo del movimiento angular de β en (1) y (2), para t = 4.58 seg: 0.458 i 0.2 k (rad/seg) (3) 0.499 0.5 rad/seg 0.1 i 0.2k x 0.458 i 0.1 i 0.916 j (rad/seg2) (4) 0.136 rad/seg2 2).- Cálculo del movimiento de P usando coordenadas esféricas en .a).- Orientación de los vectores unitarios que definen las coordenadas esféricas (ver figura P1-19a) e identificación de los parámetros que definen el movimiento: r 50 pies 30 0.458 rad / seg r 0 r 0 0.1 rad / seg 2 er e r e 0 0 b).- Cálculo de la velocidad y aceleración de P en : P1-19a VP r e 50 0.458 e 22.9 e (pie/seg) a P r 2 er r e 10.48 er 5 e (pie/seg2) c).- Cálculo del movimiento angular del marco móvil y del punto base O, usando coordenadas esféricas en , ya definido: Si: k cos er sen e cos 30 er sen30 e 0.866 er 0.5 e j sen er cos e 0.5 er 0.866 e Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 31 i e También: 0.20.866 er 0.5 e 0.1732 er 0.1 e (rad/seg) 0 VO x rAO 0.2 k x 4 j 0.8 i 0.8 e (pie/seg) aO x x rAO 0.2 k x 0.8 i 0.16 j aO 0.08 er 0.139 e (pie/seg2) d).- Cálculo del movimiento de P en : VP VO x rOP VP VP 0.8 e 0.1732 er 0.1 e x50 er 22.9 e VP 22.9 e 5.8 e (m/seg) VP 23.623 pie/seg a P aO x rOP x x rOP 2 x VP a P 0 x x rOP 0.1732 er 0.1 e x 5 e 0.5 er 0.866 e (pie/seg2) 2 x VP 0.3464 er 0.2 e x 22.9 e 7.93 e (pie/seg2) Luego: a P 0.08 0.5 10.48 er 0.139 0.866 5 e 7.93 e Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 32 _____________________________________________________________________ a P 11.06 er 6.005 e 7.93 e (pie/seg2) a P 14.875 pie/seg2 1-20.- Una partícula P se mueve con una aceleración relativa constante ao = 3 m/seg2 de A hacia B, en la ranura AB de un disco giratorio vertical. En el instante mostrado (ver figura), la partícula está en B con una rapidez de Vo =10 m/seg a lo largo de A a B, el disco está girando, respecto a su eje horizontal con una rapidez angular constante D = 15 rad/seg. El eje horizontal está rígidamente unido a un eje vertical que gira con una velocidad angular constante o = 1 rad/seg. Determine la velocidad y aceleración de P, para el instante considerado, si: h = 3 m y R = 5 m. P1-20 Solución 1).- Movimiento del marco móvil disco y del punto base o conveniente D: OD OD OD 15 i j (rad/seg) x OD j x 15 i 15 k (rad/seg2) VD OD x rOD j x 4 i 4 k (m/seg) a D 2 OD rOD 4 i 4 i (m/seg2) 2).- Movimiento de P en el marco móvil : rDP 4 j 3 k (m), VP 10 j (m/seg) y a P 3 j (m/seg2) 3).- Movimiento de P en el marco inercial : VP VD x rDP VP 4 k 15 i j x 5 j 3 k 10 j VP 3 i 55 j 71 k (m/seg) VP 89.96 m/seg a P a D x rDP x x rDP 2 x VP a P Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ x rDP 15 k x 5 j 3 k 75 i (m/seg2) x x rDP 15 i j x 3 i 45 j 75 k 75 i 1125 j 678 k 33 (m/seg2) 2 x VP 30 i 2 j x 10 j 300 k (m/seg2) a P 146 i 1128 j 978 k (m/seg2) → a P 1500.06 m/seg2 1-21.- En el instante que se ilustra, la varilla AB gira en torno del eje Z con una velocidad angular 1 = 4 rad/seg y una aceleración angular 1 = 3 rad/seg2 . En ese mismo instante, la varilla circular sufre un movimiento angular de 2 =2 rad/seg y 2 = 8 rad/seg2 en relación con la varilla AB como se ilustra. Si el collarín D se mueve hacia abajo en torno de la varilla circular con rapidez de 3 plg/seg, la cual se incrementa a 8 plg/seg2. Determine la velocidad y aceleración del collarín en el instante mostrado. C D Solución 1).- Movimiento del marco móvil varilla circular y del punto conveniente o base C: 1 2 2 i 4 k P1-21 (rad/seg) 1 1 x 2 2 3 k 4 k x 2 i 8 i → 8 i 8 j 3 k R 5 j 4 k (plg) R 1 x rAB 1 2 x rBC 4 k x 5 j 2 i 4 k x 4 k → (rad/seg2) R 20 i 8 j (plg/seg) R a B xrBC x xrBC 1 xrAB 12 rAB xrBC x xrBC R 3 k x5 j 163 j 8 i 8 j x 4 k 2 i 4 k x 2 i 4 k x 4 k R 9 32 32 i 32 48 j 16 k 73 i 16 j 16 k (plg/seg2) 2).- Movimiento de D en el marco móvil varilla circular: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 34 _____________________________________________________________________ 4i (plg) 3 k (plg/seg) 8 k 9 i 2.25 i 8 k (plg/seg2) 4 3).- Movimiento de D respecto al marco inercial : VD R x 20 i 8 j 2 i 4 k x 4 i 3 k VD 20 i 24 j 3 k (plg/seg) a D R x x x 2 x x 8 i 8 j 3 k x 4 i 12 j 32 k (plg/seg2) x x 2 i 4 k x 16 j 64 i 32 k (plg/seg2) 2 x 4 i 8 k x 3 k 12 j (plg/seg2) Luego: a D 73 2.25 64 i 16 12 12 j 16 8 32 32 k a D 139.25 i 8 j 8 k (plg/seg2) 1-22.- El tablón resbala sobre el piso en A y sobre el bloque en Q. El bloque se mueve hacia la derecha con una velocidad constante de 6 pies/seg, mientras que el extremo A del tablón se mueve hacia a la izquierda con una velocidad constante de 4 pies/seg. Para la posición mostrada en la figura, encuentre la velocidad angular del tablón. P1-22 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 35 Solución Marco móvil el tablón, Q tiene un movimiento lineal respecto al tablón y Q .1).- Velocidad del marco móvil y del punto base A (XY): k Y R 4 i (pie/seg) X 2).- Movimiento de Q respecto al marco móvil: 12 i 5 j (pies) 5 12 i j (pie/seg) 13 13 3).- Movimiento de Q respecto al marco inercial tierra: VQ 6 i (pie/seg) (1) También: 5 12 VQ R x 4 i k x12 i 5 j i j 13 13 12 5 VQ 4 5 i 12 j 13 13 (2) (1)= (2), igualando componentes y operando: 12 5 13 (3) 12 *13 5 (4) 6 12 4 5 13 10 0 5 12 13 (4) en (3): 10 12 2 *13 13 * 5 0.347 rad/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 36 _____________________________________________________________________ 0.347 k (rad/seg) 1-23.- En la figura VA = 5 plg/seg () y d VA = 8 dt plg/seg2. Si la barra AB permanece en contacto con el escalón y con la superficie curva, encuentre su aceleración angular. Sugerencia: considere al punto Q (fijo al escalón) como el punto móvil y note que Q se mueve sobre una recta relativa a la barra . P1-23 Solución De acuerdo a lo anunciado la barra será el marco móvil, que hace que Q tenga un movimiento lineal con respecto a este marco. 1).- Movimiento del marco móvil y del punto base A: k (rad/seg) k y (rad/seg2) V A 5 i (plg/seg) y a A 8 i 25 8 Y A j 8 i 3.125 j X 2 (plg/seg ) 2).- Movimiento de Q respecto al marco de referencia móvil : rAQ 8 i 6 j (plg) VQ VQ aQ aQ 4 5 i 53 j (plg/seg) 4 5 i 53 j (plg/seg2) 3).- Movimiento de Q respecto al marco inercial : a).- Velocidad de Q: VQ V A x rAQ VQ → VQ 0 5 i k x 8 i 6 j VQ 4 5 i 53 j 3 4 0 5 6 VQ i 8 VQ j 5 5 Igualando componentes y operando: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 0 8 0.3 3 VQ 5 VQ → rad/seg y 37 4 40 160 → 0 VQ 5 6 → 0 5 6 3 15 5 VQ 4 plg/seg b).- Aceleración de Q: aQ a A k x rAQ 2 rAQ 2 x VQ aQ 0 8 6 0.072 1.44 0.8 aQ i 3.125 8 0.054 1.92 0.6 aQ j Igualando componentes y operando: 8 * 0.8 aQ 6 6.488 6 * 0.6 aQ 8 4.991 10 aQ 81.85 aQ 8.185 plg/seg2 Luego: 0.01 rad/seg2 1-24.- La posición de la punta de la aguja A está controlada por el robot aquí mostrado. En la posición indicada la punta se mueve a una velocidad constante u = 180 mm/seg relativa al solenoide BC. Al mismo tiempo el brazo CD gira a una velocidad angular constante 2 = 1.6 rad/seg con respecto a la componente DEG. Sabiendo que el robot completo gira alrededor del eje X a una velocidad angular constante 1 = 1.2 rad/seg, determínese, la velocidad y aceleración de A para el instante mostrado. X P1-24 Solución 1).- Movimiento del marco móvil Solenoide y del punto base o conveniente C.- Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 38 _____________________________________________________________________ a).- Movimiento del marco móvil: 1 2 1.2 i 1.6 j (rad/seg) 1 x 2 1.2 i x 1.6 j 1.92 k (rad/seg2) b).- Movimiento del punto base C: R 0.5 i 0.3 j 0.6 k (m) i).- Movimiento del marco intermedio DEG y del punto conveniente D: DE 1 1.2 i y DE 0 VD DE x rD 1.2 i x 0.5 i 0.3 j 0.36 k (m/seg) a D DE x DE x rD 1.2 i x 0.36 k 0.432 j (m/seg2) ii).- Movimiento del punto base C en el marco intermedio DEG: C 0.6 k (m) C 2 x C 1.6 j x 0.6 k 0.96 i (m/seg) C 2 x2 x C 1.6 j x 0.96 i 1.536 k (m/seg2) iii).- Movimiento de C en el marco primario : R VD DE x C C 0.36 k 1.2 i x 0.6 k 0.96 i R 0.96 i 0.72 j 0.36 k (m/seg) R a D DE x DE x C 2 DE x C C R 0.432 j 1.2 i x 0.72 j 2.4 i x 0.96 i 1.536 k Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 39 R 0.432 j 2.4 k (m/seg2) 2).- Movimiento de A en el marco móvil solenoide BC: A 0.25 i A u 0.18 i (m) , (m/seg) y 0 3).- Movimiento de A en el marco primario : VA R x A A VA 0.96 i 0.72 j 0.36 k 1.2 i 1.6 j x 0.25 i 0.18 i V A 0.78 i 0.72 j 0.76 k (m/seg) V A 1.3 m/seg a A R x A x x A 2 x A x A 1.92 k x 0.25 i 0.48 j (m/seg2) x x A 1.2 i 1.6 j x 0.4 k 0.48 j 0.64 i (m/seg2) 2 x A 2.4 i 3.2 j x 0.18 i 0.576 k (m/seg2) a A 0.64 i 0.432 0.48 0.48 j 0.576 2.4 k a A 0.64 i 1.392 j 1.824 k (m/seg2) X 1-25.- La rotación del brazo OP está controlada por el movimiento horizontal del vástago ranurado vertical. 9 m/seg2 cuando Si X 1.2 m/seg y X y en ese instante. Usando coordenadas cartesianas. X 50 mm, hallar Solución 1).- Gráfico para un instante cualquiera (ver figura P1-25a): P1-25 Y Autor: Ing. VICTOR MANUEL MENACHO LOPEZ 1m Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 40 _____________________________________________________________________ Si: sen X 0.1 X 0.1sen (1) 2).- Derivando respecto al tiempo dos veces (1), y despejando y : X 0.1cos X 0.1cos P1-25a (2) X 0.1sen 2 X 0.1sen 2 0.1cos 0.1cos 3).- Para el caso especifico de : (3) X 0.05 m , X 1.2 m/seg, y X 9 m/seg2 .- En (1): sen 0.05 0.5 0.1 30 En (2): 1.2 13.86 rad/seg 0.1cos 30 En (3): 9 0.1 sen30 *13.86 2 214.84 rad/seg2 0.1cos 30 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 1-26.- Los pasadores A y B deben permanecer siempre en la ranura vertical del yugo C, el cual se mueve para X = 1.5 m, hacia a la derecha a una velocidad de 2 m/seg y aceleración de 3 m /seg2 (constante), partiendo del reposo cuando X = 0, tal como se muestra en la figura. Además, los pasadores no pueden abandonar la ranura elíptica. a) ¿Cuál es la velocidad a la que los pasadores se aproximan una a otra? y b) ¿Cuál es el ritmo de cambio de la velocidad de acercamiento entre los pasadores? 41 P1-26 Solución 1).- Por intersección de trayectorias: Si: X2 Y2 2 1 32 2 0 0 1 X X 0 X 0 t X t 2 2 (1) X 3 2 t 2 (2) Derivando (1) y (2) respecto al tiempo dos veces: XX YY 2 0 32 2 (3) X 3 t (4) XX X 2 YY Y 2 0 32 22 X 3 m/seg2 3).- Para el caso especifico de : X (5) (6) 1.5 m , X 2 m/seg , y X 3 m/seg2 para B y A. En (1): 1.5 2 Y 2 2 1 32 2 YB 1.732 m y YA 1.732 m Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 42 _____________________________________________________________________ En (3): 15 * 2 1.732YB 0 YB 0.77 m/seg y YA 0.77 m/seg 32 22 En (5): 1.5 * 3 2 2 1.732YB 0.77 2 0 YB 2.52 m/seg2 y YA 2.52 m/seg2 2 2 3 2 4).- Cálculo de la velocidad y aceleración de acercamiento entre A y B, que se da en la dirección vertical: YA YB YA YA YB YA B B YA YA YB 0.77 0.77 1.54 m/seg B YA YA YB 2.52 2.52 5.04 m/seg2 B et en 1-27.- La rotación de la biela OA está gobernada por el émbolo del cilindro hidráulico BC, el cual se extiende a la velocidad constante s K durante un intervalo del movimiento. Obtener la expresión vectorial de la velocidad y aceleración del extremo A para un valor de dado, empleando los vectores unitarios et y en de las coordenadas naturales. P1-27 Solución 1).- Cálculo del movimiento angular de OA: Si: sen 2 S 2 b s sen 2 2b (1) Derivando (1) dos veces, respecto al tiempo: s cos 2 * 2 2b K (2) b cos 2 P1-27a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ cos 2 sen 2 2 2 0 s b tg 2 2 2 K 2 tg 2 2b 2 cos 2 2 43 (3) 2).- Cálculo del movimiento de A en las coordenadas naturales pedido: V A et K et (Unidades de velocidad) b cos 2 a A et 2 en K 2 1 tg 2 et en (Unid. de aceleración) 2 2 b cos 2 2 1-28.- El sector semicircular gira con una velocidad angular antihoraria constante = 3 rad/seg. Simultáneamente, el brazo ranurado OC oscila alrededor de la recta OB (fijo en el sector) de modo que varia constantemente a razón de 2 rad/seg, salvo al final de cada oscilación cuando se invierte el movimiento. Hallar la aceleración total del pasador A cuando = 30° y es positiva (horario); usando coordenadas polares en el sector, para el instante pedido. P1-28 Solución 1).- Orientación de los vectores unitarios que definen las coordenadas polares (ver figura P1-28a): A z 2).- Movimiento del marco móvil sector semicircular y del punto base “O”: 3 eZ rad/seg y 0 0.15 m VO aO 0 3).- Movimiento de A respecto al marco móvil.- O P1-28a a).- Identificación de los parámetros que definen el movimiento en las coordenadas polares: 0.15 cos 0.15 sec (1) 0.15 sec tg (2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 44 _____________________________________________________________________ 0.15 sec tg 2 2 sec3 2 sec tg Para el caso especifico de: 30 , 2 0.173 m, 0.2 2 rad/seg y m/seg y (3) rad/seg, y 0 en (1), (2), y (3): 1.155 m/seg2 0 b).- Cálculo del movimiento: rOA 0.173 e VA OC aA aA OC OC e e 0.2 e 0.173 * 2 e 0.2 e 0.346 e (m/seg) 2 e 2 e 1.155 0.173 * 4e 2 * 0.2 * 2e 0.463 e 0.8 e (m/seg2 ) 4).- Cálculo de la aceleración de A respecto al marco : aA aA OC 2 rOA 2 x V A OC a A 0.463e 0.8e 9 * 0.173e 6eZ x 0.2e 0.346e a A 0.463 1.557 2.076 e 0.8 1.2 e a A 0.982 e 0.4 e (m/seg2) 1-29.- La manivela OB gira, en sentido horario, con una velocidad constante o = 5 rad/seg., usando coordenadas polares y/o naturales para B. Hallar, en el instante en que = 90°, la aceleración angular de la barra BD que desliza por el collarín que pivota en “C”. a A 1.06 m/seg2 Solución P1-29 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 1).- Orientación de los vectores unitarios, que definen las coordenadas polares y naturales (ver figura P1-29a), para θ = 90º: e B tg 0.25 0.6 45 22.62 m. 0.65 e cos et sen en 0.60m. e sen et cos en 2).- Cálculo de la velocidad y aceleración de B, tomando como punto de referencia “O” y usando coordenadas naturales: e et en 0.25m. C O P1-29a VB o r et 5 * 0.25 et 1.25 et (m/seg) (1) a B o2 r en 25 * 0.25 en 6.25 en (m/seg2) (2) 3).- Cálculo de la velocidad y aceleración de B, tomando como punto de referencia C y usando coordenadas polares: VB e en cos et sen en 0.65 sen et cos en VB cos 0.65 sen et sen 0.65 cos en (3) (3)= (1), igualando componentes y operando: sen 0.65 cos cos 0.65 sen 1.25 tg 0.25 0.65 cos 0.65 sen 1.25 0.6 0.39 cos 0.1625sen 0.312 0.74 rad/seg También: sen22.62 0.65 0.74cos 22.62 1.1544 Si: m/seg a B 2 cos et sen en 2 sen et cos en Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 46 _____________________________________________________________________ 2 sen 2 cos aB e en t 2 cos 2 sen (4) (4)= (2), igualando componentes y operando: cos 2 sen sen 2 cos 6.25 2 cos 6.25 0.25 tg 2 sen 0.6 2 2 0.6cos 0.25 sen 0.25 * 2 sen 3.75 0.6 * 2 cos 1.11 3.75 6.249 rad/seg2 0.4225 6.25 rad/seg2 1-30.- Un regulador de bolas tiene los siguientes datos en el instante de interés: = 0.2 rad/seg, = 0.04 rad/seg2 , = 45° , = 5 rad/seg , y = 0.2 rad/seg2 . Determinar para el instante mencionado los vectores velocidad y aceleración de la esfera A, utilizando las coordenadas cilíndricas, si = 0.3 m. B A V ez O en et P1-30 e A e Solución 1).- Orientación de los vectores unitarios (ver figura P1-30a) e identificación de los parámetros que definen el movimiento: sen 0.3sen45 0.212 m cos 1.061 m / seg cos 2sen 5.261 m / seg 2 P1-30a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 0.2 rad / seg 0.04 rad / seg 2 47 Z cos y Z sen 5 * 0.3sen45 1.061 m / seg Z sen 2 cos 5.346 m / seg 2 2).- Cálculo de la velocidad y aceleración de A: V A e e Z eZ 1.061 e 0.212 * 0.2 e 1.061 eZ V A 1.061 e 0.0424 e 1.061 eZ (m/seg) a A 2 e 2 e Z eZ a A 5.261 0.212 * 0.2 2 e 2 *1.061* 0.2 0.212 * 0.04 e 5.346 eZ a A 5.269 e 0.4329 e 5.346 eZ (m/seg2) 1-31.- La varilla OA se mantiene con un ángulo constante = 30° y gira alrededor de la vertical con celeridad de 120 RPM. Simultáneamente el cursor P oscila a lo largo de la varilla a una distancia variable del pivote fijo O dada en milímetros por R = 400 + 100 sen2 n t, donde la frecuencia de oscilación n a lo largo de la varilla, es constante e igual a 2 ciclos por segundos, y el tiempo se mide en segundos. Calcular la aceleración del cursor en el instante en que su velocidad R a lo largo de la varilla sea máxima. Usando coordenadas esféricas. Solución 1).- Orientación de los vectores unitarios (ver figura P1-31a) e identificación de los parámetros que definen el movimiento en coordenadas esféricas: er e P e r R 400 100sen2 nt r R 200 n cos 2 nt 400 2 n 2 sen2 nt r R Para P1-31 R R max : cos 2 nt 1 y sen2 nt 0 P1-31a Luego: O Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 48 _____________________________________________________________________ 30 r 0.4 m r 0.2 * * 2 1.257 m / seg y 0 r 0 0 2).- Cálculo de la aceleración de P, para 4 rad / seg 120 * 30 0 R max : a P r 2 sen 2 er r 2 sen cos e 2r sen e a P 0.44 0.25 er 0.44 0.5 * 0.866 e 2 *1.257 * 4 * 0.5 e 2 2 a P 15.791 er 27.35 e 15.796 e a P 35.311 m/seg2 1-32.- Por una tubería curva AB que gira con una velocidad angular constante de 90 RPM fluye agua. Si la velocidad constante de ésta respecto a la tubería es 8 m/seg, hallar la aceleración total de una partícula de agua en el punto P. Y ω O Solución Marco móvil tubería curva AB. 1).- Movimiento del marco móvil y del punto base “O’ ”: AB 90 * 30 X P1-32 Y k 3 k 9.425 k (rad/seg) P y AB 0 VO ' AB x rAO ' VO ' 3 k x 0.5 i 4.71 j (m/seg) O O 2 aO ' AB rAO ' → aO ' 88.82 0.5 i 44.41 i (m/seg2) X A P1-32a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 49 2).- Movimiento de P respecto al marco móvil: rO 'P 0.5 j (m), VP AB 8 i (m/seg) y a P AB 82 j 128 j (m/seg2 ) 0.5 3).- Movimiento de P respecto al marco inercial: aP aP AB 2 aO ' AB rO 'P 2 AB xVP AB a P 128 j 44.41 i 9.425 2 0.5 j 18.85 k x 8 i a P 44.41 i 21.62 j (m/seg2 ) 1-33.- Hallar la aceleración angular de la barra EC en la posición representada, con 2 rad/seg y 6 rad/seg2 cuando = = 60° . La clavija A es solidaria de la barra EC. La ranura circular de la manivela DO tiene un radio de curvatura de 150 mm. En la posición de la figura, la tangente a la ranura en el punto de contacto es paralela a AO. Solución Marco móvil DO y Q pertenece a OD, pero coincidente con A. P1-33 Y 1).- Cálculo de la velocidad de A respecto a OD y la velocidad angular de CE ( OCA es equilátero).a).- Velocidad de A tomando como punto de referencia O en . X Si: VA VA VA OD OD VA VQ OD VQ xrOQ (1) 0.5 i 0.866 j 2 k x 0.15 0.5 i 0.866 j 0.26 i 0.15 j Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 50 _____________________________________________________________________ b).- Velocidad de A tomando como punto de referencia C en : V A CE xrCA CE k x 0.15 0.5 i 0.866 j CE 0.13 i 0.075 j (2) (1)= (2): CE 0.13 i 0.075 j V A OD 0.5 i 0.866 j 0.26 i 0.15 j Igualando componentes y operando: 0.13 CE 0.5 V A 0.26 OD 0.075 CE 0.866 V A 1.733 VA 0.5 V A 0.15 OD 0.26 OD 0.866 V A 0.15 1.5 V A OD 0.26 0.5 V A 0.26 OD OD 0.52 m/seg OD CE 0.5 * 0.52 0.26 4 rad/seg 0.13 2).- Cálculo de la aceleración angular de CE: a).- Aceleración de A tomando como punto de referencia O en : aA aA aA aA OD OD OD aQ 2 x V A at 0.5 i 0.866 j (3) OD 0.52 2 0.866 i 0.5 j 0.15 0.5 at 1.56 i 0.866 at 0.9 j (m/seg2) aQ 6 k x 0.15 0.5 i 0.866 j 4 * 0.15 0.5 i 0.866 j aQ 1.08 i 0.07 j (m/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 2 xV A OD 51 4 k x 0.520.5 i 0.866 j 1.8 i 1.04 j (m/seg2) b).- Aceleración de A tomando como punto de referencia C en : a A k x 0.150.5 i 0.866 j 2 0.150.5 i 0.866 j a A 0.13 1.2 i 0.075 2.08 j (4) (3)= (4), igualando componentes y operando: 0.13 1.2 0.5 at 1.56 1.08 1.8 at 2.16 0.26 (5) 0.075 2.08 0.866 0.9 0.07 1.04 11.55 at 0.93 (6) (5) en (6): 0.93 11.55 2.16 0.26 24.018 3 12 rad/seg2 B 1-34.- Al manipular el halterio, la garra del mecanismo robótico lleva una velocidad angular constante P = 2 rad/seg en torno al eje OG con fijo en 60°. La totalidad del conjunto rota en torno al eje Z a la velocidad constante = 0.8 rad/seg y G se mueve respecto a O a una velocidad constante de 0.2 m/seg: Hallar la velocidad y aceleración de B para el instante mostrado, si a = 300 mm y OG = 900 mm. Expresar los resultados en función de la orientación dada de los ejes x-y-z donde “y” es paralelo al “Y”. Solución Marco móvil eje OG. P1-34 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 52 _____________________________________________________________________ 1).- Movimiento del marco móvil y del punto base G. a).- Del Marco móvil: OG cos i sen k OG 0.4 i 0.69 k → OG 0.8 cos 60 i sen60 k OG 0 (rad/seg) y b).- Cálculo de la velocidad y aceleración de G, usando coordenadas esféricas: er e 30 0.8 rad / seg 2 r 0.9 m r 0.2 m / seg 0 r 0 0 0 G e er k y P1-34a O e i e j i).- Cálculo de la velocidad de G: VG r er r sen e 0.2 er 0.9 * 0.8 sen30 e VG 0.2 er 0.36 e 0.36 j 0.2 k (m/seg) ii).- Cálculo de la aceleración de G: aG r 2 sen 2 er r 2 sen cos e 2r sen e aG 0.9 * 0.8 2 * 0.5 2 er 0.9 * 0.8 2 * 0.5 * 0.866 e 2 * 0.2 * 0.8 * 0.5 e aG 0.144 er 0.249 e 0.16 e 0.249 i 0.16 j 0.144 k (m/seg2) 2).- Movimiento de B respecto a OG: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 53 rGB 0.3 i (m) VB aB P x rGB 2 k x 0.3 i 0.6 j (m/seg) OG P2 rGB 4 0.3 i 1.2 i (m/seg2) OG 3).- Cálculo de la velocidad y aceleración de B en el marco inercial : VB VB OG VG OG x rGB (1) OG x rGB 0.4 i 0.69 k x 0.3 i 0.207 j ( rad/seg) En (1): VB 0.6 j 0.36 j 0.2 k 0.207 j 0.447 j 2 k (m/seg) VB 2.05 m/seg aB aB OG aG OG x OG xrGB 2OG xVB OG (2) OG x OG x rGB 0.4 i 0.69 k x 0.207 j OG x OG xrGB 0.143 i 0.083 k 2OG xVB OG (m/seg2) 0.8 i 1.38 k x 0.6 j 0.828 i 0.48 k m(seg2) En (2): a B 1.2 0.249 0.143 0.828 i 0.16 j 0.144 0.083 0.48 k a B 1.922 i 0.16 j 0.419 k (m/seg2) a B 1.974 m/seg2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 54 _____________________________________________________________________ 1-35.- Se obliga a girar al brazo ranurado AOB alrededor del punto O, cuando se mueve el perno A a lo largo del carril horizontal. Para la posición que se muestra, establezca la relación entre la velocidad VB del perno B y la velocidad VA del perno. Y Solución 1).- Aprovechando las trayectorias (ver figura P135a), que se conocen: a X cot X a b tg Y b cot Y tg P1-35 (1) Y (2) (1) en (2): Y A b X a O 2).- Cálculo de la relación de las velocidades de B y A, derivando (3), respecto al tiempo: b b Y X VB V A a a a x (3) X b y B P1-35a 1-36.- Un pasador está obligado a moverse dentro de una ranura circular de 6 m de radio. El pasador debe moverse también siguiendo una ranura recta que se mueve hacia a la derecha a una velocidad constante V de 3 m/seg, mientras se mantiene a un ángulo constante con la horizontal de 30º ¿Cuáles son la velocidad y aceleración del pasador A en el instante que se muestra? Solución 1).- Por intersección de trayectorias: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ X 2 Y 2 36 55 (1) 1 X 3 t 3 Y b (2) 2).- Derivando dos veces, respecto al tiempo (1) y (2): P1-36 2 XX 2YY 0 (3) 1 Y X 3 3 (4) X 2 XX Y 2 YY 0 (5) 1 Y X 3 (6) 3).- Para el caso especifico de X 5.196 m y Y 3 m: En (3): 5.196 X 3Y 0 Reemplazando (4): 3 5.196 X X 3 0 3 6.93 X 5.196 X 0.75 m/seg En (4): Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 56 _____________________________________________________________________ 1 0.75 3 1.3 m/seg Y 3 V A 0.75 i 1.3 j (m/seg) En (5): 0.752 5.196 X 1.32 3Y 0 5.196 X 3Y 2.2525 Reemplazando (6): 3 5.196 X X 2.2525 3 X 0.325 m/seg2 En (6): 1 Y X 0.188 m/seg2 3 a A 0.325 i 0.188 j (m/seg2) 1-37.- En el instante en que θ = 50º, la guía ranurada se está moviendo hacia arriba con una aceleración de 3 m/seg2 y una velocidad de 2 m/seg. Usando coordenadas cartesianas, determine la velocidad angular y la aceleración angular de la barra AB en este instante. Solución P1-37 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 57 1).- Por las condiciones geométricas, que presenta el sistema (ver figura P1-37a): Y cos Y r Y r cos (1) 2).- Derivando dos veces (1) respecto al tiempo: Y r sen r sen AB B (2) r Y r cos 2 r sen 2 Y r cos AB r sen AB A X y x (3) P1-37a 3).- Para el caso específico de 50º , r 0.3 m, Y 2 m/seg y Y 3 m/seg2.- En (2): AB 2 8.7 rad/seg Y r sen 0.3 sen50º AB 8.7 k (rad/seg) En (3): AB 2 Y r cos AB 3 0.3 cos 50 * 8.7 2 50.46 rad/seg2 0.3 sen 50 r sen AB 50.46 k (rad/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 58 _____________________________________________________________________ 1-38.- Se muestra un simple aspersor de jardín. El agua entra en la base y sale por el extremo a una velocidad de 3 m/seg respecto al rotor del aspersor. Además, ésta sale dirigida hacia arriba formando un ángulo de 60º como se muestra en el diagrama. El rotor tiene una velocidad angular de 2 rad/seg. Tomando como referencia el terreno ¿Cuáles son las componentes axial, transversal y radial de la velocidad y aceleración de una de las partículas del agua al salir del rotor? P1-38 Solución 1).- Orientación de los vectores unitarios (ver figura P1-38a) e identificación de los parámetros que definen el movimiento: V 0.3 m 2 rad / seg 3 cos 60º 1.5 m / seg 0 0 ez 60° Z 3 sen60º 2.6 m / seg Z 9.81 m / seg 2 O P e e P1-38a 2).- Cálculo de la velocidad y aceleración de la partícula del agua que está saliendo: VP e e Z eZ 1.5 e 0.3 * 2 e 2.6 eZ VP 1.5 e 0.6 e 2.6 eZ (m/seg) a P 2 e 2 e Z eZ a P 0.3 * 4 e 2 *1.5 * 2 e 9.81 eZ Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 59 _____________________________________________________________________ a P 1.2 e 6 e 9.81 eZ (m/seg2) 1-39.- El collarín A se mueve a lo largo de una guía circular de radio “e” al girar el brazo OB en torno a O. Determine los vectores velocidad y aceleración de A en función de , , y Naturales y b) Polares. e; usando coordenadas: a) Solución 1).- Usando coordenadas Naturales o Coordenadas Tangencial y normal.P1-39 a).- Orientación de los vectores unitarios que definen las coordenadas (ver figura P1-39a): s b).- Cálculo de la velocidad y aceleración de A: Si: s 2 e en B A et C s 2 e e s 2 e Luego: O V A s et 2 e et V A 2 e P1-39a (Unid. e de Velocidad) a A s et s 2 c en 2 e et 4 e 2 en A e e C a A 2 e 2 4 4 (Unid. de aceleración) 2).- Usando coordenadas Polares: a).- Orientación de los vectores unitarios que definen las coordenadas (ver figura P1-39b): B e O P1-39b Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 60 _____________________________________________________________________ b).- Cálculo de la velocidad y aceleración de A.Si: 2 e cos 2 e sen 2 e cos 2 2 e sen Luego: VA e e → V A 2 e sen e 2 e cos e V A 2 e (Unid. de velocidad) a A 2 e 2 e a A 2 e cos 2 2esen 2e cos 2 e 4esen 2 2e cos e a A 4e cos 2 2esen e 4esen 2 2e cos e a A 2e 2 2 4 cos 2 2 sen 2 2 * 2 cos sen 2 2 4 sen 2 2 cos 2 2 * 2 cos sen a A 2e 2 4 4 (Unid. de aceleración) 1-40.- El pasador P es solidario a la corredera y su movimiento está guiado por la ranura abierta en la barra BD y por la corredera que desliza sobre la barra AE. Sabiendo que en el instante considerado las barras giran en sentido horario con velocidades angulares constantes ωAE = 4 rad/seg y ωBD = 1.5 rad/seg, hallar la velocidad del pasador P usando coordenadas polares. Solución P1-40 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 1).- Orientación de los vectores unitarios que definen las coordenadas polares e identificación de los parámetros, que definen el movimiento para cada caso: A P 61 e 1 a).- Tomando como punto de referencia A en (ver figura P1-40a): 1 1 0.5tg 30º 0.2887 m 1 4 rad / seg 1 ? P1-40a b).- Tomando como punto de referencia B en (ver figura P1-40b): 2 e 2 cos 60º e1 sen60º e1 e P e2 e 2 sen60º e1 cos 60º e1 0.5 0.577 m cos 30º 2 ? 2 1 e1 2 1.5 m / seg B P1-40b 2).- Cálculo de la velocidad de P.a).- Tomando como punto de referencia A: VP 1 e1 11 e1 1 e1 0.2887 * 4 e1 1 e1 1.155 e1 (1) b).- Tomando como punto de referencia B: VP 2 e 2 22 e 2 2 cos 60º e1 sen60º e1 0.577 *1.5sen60º e1 cos 60º e1 VP 2 cos 60º 0.75 e1 2 sen60º 0.433 e1 (2) (1) = (2): 1.155 2 sen60º 0.433 2 0.8337 m/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 62 _____________________________________________________________________ Luego: VP 0.8337 * 0.5 0.75 e1 0.8337sen60º 0.433 e1 VP 0.333 e1 1.155 e1 VP 1.2 m/seg También: VP 0.8337 e 2 0.577 *1.5 e 2 VP 0.8337 e 2 0.8655 e 2 (m/seg) 1-41.- Un tambor de diámetro variable gira impulsado por un motor a una velocidad angular constante ω de 10 RPM. Una cuerda de diámetro “d” igual a 12 mm está enrollada al tambor y sostiene un peso W. Se desea que la velocidad del movimiento hacia arriba del peso esté dado por: t2 X 0.12 (m/seg) 26 x10 3 VP 1.2 m/seg → En donde, para t = 0 la cuerda está justo comenzando a enrollarse sobre el tambor en Z = 0 ¿Cuáles son las componentes radial y axial de la velocidad, para el peso W cuando t = 100 seg? P1-41 Solución 1).- Orientación de los vectores unitarios que definen las coordenadas cilíndricas en un punto inmediato de contacto de la cuerda que une el peso W con el tambor (ver figura P1-41a) e identificación de los parámetros que definen el movimiento: Z e r ? 10 * 1.0472 rad / seg r ? 30 r e P e P1-41a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 63 Z ? Z 0.012 * 2 x10 3 m / seg 2 2).- De la velocidad de P: VP r er r e Z eZ En donde: r X 0.12 r 0.1146 t2 26 x10 3 t2 (m/seg) 27227.2 (1) También, la velocidad axial es: dZ 2 x10 3 m/seg Z dt Separando variables e integrando: Z 0 t dZ 2 x10 3 dt Z 2 x10 3 t 0 → t Z 2 x10 3 (2) (2) en (1): Y r 0.1146 Z2 2 x10 3 2 * 1 27227.2 → r 0.1146 9.182 Z 2 (m) 3).- Cálculo de la componente radial de la velocidad del peso: Para: Z = 2x10-3 m/seg = 2 mm/seg y Z 2 x10 3 *100 0.2 m Si: Y r 9.182 * 2ZZ Luego: Y r 9.182 * 2 * 0.2 * 2 x10 3 7.3456 x10 3 m/seg → Y 7.346 mm/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 64 _____________________________________________________________________ 1-42.- Una partícula P tiene una velocidad variable V(t) a lo largo de una hélice enrollada alrededor de un cilindro de radio “e”. La hélice forma un ángulo constante α con un plano A perpendicular al eje Z. Expresar la aceleración de P, utilizando coordenadas cilíndricas. A continuación expresar et utilizando los vectores unitarios cilíndricos, teniendo en cuenta que la suma de las componentes transversal y axial de la aceleración de P (que se acaba de calcular) pueden darse simplemente con V et , de tal manera se expresa la aceleración coordenadas naturales. teniendo en cuenta que de en e , demostrar que de P en Finalmente, la velocidad el radio de P1-42 e . curvatura está dado por c cos 2 Solución 1).- Orientación de los vectores unitarios indicados (ver figura P1-42a) y cálculo de la aceleración de P en coordenadas cilíndricas.- Z VP Si: e VP V cos e Vsen eZ Derivando el vector velocidad de P respecto al marco inercial: ez O P e e a P V cos e V cos e sen eZ V cos en a P V cos e V cos e Vsen eZ Además: et e P1-42a V cos e Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 65 V 2 cos 2 aP e V cos e Vsen eZ (Unid. de aceleración) e 2).- Determinación de la orientación del vector unitario tangencial y de la aceleración de P en coordenadas naturales: et cos e sen eZ Si: et V 2 cos 2 aP e V cos e sen eZ y e en e a P V et V 2 cos 2 en (Unid. de Aceleración) e 3).- Determinación del radio de curvatura: Si: V2 c c V 2 cos 2 e e (Unid. de longitud) cos 2 1-43.-Una barra vertical gira de acuerdo con: 3 sen0.1 t rad/seg, con t en seg. Fijado a la barra CD tenemos un sistema de bielas HI y FG de 200 mm de longitud cada una articulada entre sí en sus puntos medios K. Además GA e IA de 100 mm de longitud están articuladas entre sí tal como se muestra. En el extremo A se encuentra un marcador que marca una curva sobre la placa J. El ángulo β del sistema, viene dado por: P1-43 t 1.3 (rad), con t en seg. ¿Cuáles son las componentes radial y transversal respecto al eje N-N de 10 la velocidad y de la aceleración del marcador para el instante t = 5 seg? (Nota: el pasador F está fijo, pero el pasador H se mueve verticalmente a lo largo de una ranura tal como se muestra). Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 66 _____________________________________________________________________ Solución H 1).- Orientación de los vectores unitarios de las coordenadas cilíndricas (ver figura P1-43a) e identificación de los parámetros que definen el movimiento (marcador en traslación): G ez O e A e 40 200 cos 100 cos 40 300 cos 300sen F (mm) I (mm/seg) 300 cos 2 300sen (mm/seg2) 3sen0.1 t P1-43a (rad/seg) 0.3 cos0.1 t (rad/seg2) Para el caso específico de t = 5 seg: 5 0.8 (rad) ó 45.84º 10 1 (rad/seg) y 0 10 1.3 40 300 cos 45.84º 249 (mm) 300sen45.84º * 0.1 21.52 (mm/seg) 300 cos 45.84º * 0.12 2.09 (mm/seg2) 3sen0.5 1.438 (rad/seg) 0.3 cos 0.5 0.263 (rad/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 67 2).- Cálculo de la velocidad y aceleración de A: VA e e V A 21.52 e 249 *1.438 e 21.52 e 358.062 e (mm/seg) 2 * 21.52 *1.438 e a A 2 e 2 e 2.09 249 *1.438 2 e 249 * 0.263 a A 516.98 e 127.38 e (mm/seg2) 1-44.- En la posición que se muestra la varilla DC gira en sentido antihorario a la velocidad constante ω = 2 rad/seg. Usando coordenadas naturales para A (perteneciente a CD), hallar la velocidad angular y aceleración angular de EBO en el instante mostrado. ω Solución P1-44 1).- Orientación de los vectores unitarios, que definen las coordenadas natural (ver figura P1-44a): O 2).- Cálculo de la velocidad y aceleración de A, tomando como punto de referencia “C”: V A rCAet 2 * 0.15 0.3 et (m/seg) (1) a A 2 rCAen 4 * 0.15 en 0.6 en (m/seg2) (2) D 3).- Cálculo de la velocidad y aceleración de A, tomando como punto de referencia “O”; escogiendo A’ como punto perteneciente a OBE, pero coincidente con A.- A C en et P1-44a a).- Si: VA VA OBE V A' Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 68 _____________________________________________________________________ VA VA VA 2 2 e en OBE eb x0.15 et t OBE 2 2 2 2 V A et 0.15OBE V A en OBE OBE 2 2 (3) (1) = (3): 0.3 2 VA 0.3 2 m/seg VA OBE OBE 2 0 0.15OBE 0.3 2 * 2 2 OBE 2 rad/seg (antihorario) b).- Si: aA aA OBE a A' 2OBE xV A OBE Donde: aA OBE aA 2 2 et en OBE 2 2 2 a A' OBE eb x r0 A' OBE rOA' OBE eb x 0.15et 40.15et 0.6et 0.15 OBE en 2OBE x V A OBE 2 2 4eb x 0.3 2 et en 1.2 et 1.2 en 2 2 Luego: 2 2 0.6 1.2 et 0.15 OBE 1.2 en a A aA aA OBE OBE 2 2 (4) (2) = (4): Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 69 2 aA 0.6 0 a A 0.6 2 (m/seg2) OBE OBE 2 2 0.6 2 0.15 OBE 1.2 0.6 0.15 OBE 1.2 2 OBE 8 rad/seg2 (horario) 1-45.- Un tubo de cañón de longitud OP = 4 m está montado en una torreta como se muestra. Para mantener el arma apuntando a un blanco móvil el ángulo azimutal β se hace aumentar al ritmo dβ/dt = 30 °/seg y el ángulo de elevación γ se hace aumentar al ritmo dγ/dt =10 °/seg. Para la posición β = 90° y γ =30°.Usando coordenadas esféricas halle la velocidad y aceleración del punto P. P1-45 Solución 1).- Orientación de los vectores unitarios que definen las coordenadas esféricas (ver figura P145a) e identificación de los parámetros que definen el movimiento: r e r e 0 r4m r 0 r 0 30 60 10 rad * 0.1745 seg 180 seg 0 P1-45a rad * 0.524 seg 180 seg 0 2).- Cálculo de la velocidad y aceleración de P: VP r e r sen e 4 * 0.1745 e 4 * 0.524 sen60 e VP 0.698 e 1.815 e VP 1.945 m/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 70 _____________________________________________________________________ a P r 2 r 2 sen 2 er r 2 sen cos e 2r cos e 0.1745 2 er 4 * 0.524 2 sen60 cos 60e 2 * 4 * 0.1745 * 0.524 cos 60e a P 4 2 2 0 . 524 sen 60 a P 0.946 er 0.4756 e 0.366 e (m/seg2) → a P 1.12 m/seg2 1-46.- Un elemento transportador baja por un plano inclinado con una velocidad de 15 m/seg. Un disco cuelga del elemento transportador y en el instante de interés que se muestra en el diagrama, está girando alrededor de AB con una velocidad angular de 5 rad/seg. Además, en el instante de interés el eje AB gira en el plano YZ con una velocidad angular 1 de 10 rad/seg y una aceleración angular 1 de 3 rad/seg2. En ese instante DB está paralelo al eje X. Hallar la velocidad y la aceleración del punto D en el instante mostrado. Solución 1).- Movimiento del marco móvil eje AB, y velocidad y aceleración del punto base B en .- P1-46 Z a).- Cálculo del movimiento del marco móvil: AB 1i 10 i (rad/seg) Y y AB 1i 3 i (rad/seg2) 20º b).-Cálculo de la velocidad y aceleración de B en : VB V A AB x rAB A P1-46a 0 VB 15 cos 20 j sen20k 10 i x 3 k AB VB 44.09 j 5.13 k (m/seg) aB 0 0 2 a A a B AB x rAB AB rAB 3 i x 3 k 100 3 k AB Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 71 a B 9 j 300 k (m/seg2) 2).- Movimiento de D en el marco móvil eje AB: rBD 0.6 i (m) VD aD AB AB x rBD 5 k x 0.6 i 3 j (m/seg) 2 rBD 25 0.6 i 15 i (m/seg2) 3).- Cálculo de la velocidad y aceleración de D en : V D VB VD AB AB x rBD 44.09 j 5.13 k 3 j 10 i x0.6 i VD 41.09 j 5.13 k (m/seg) aD aB aB AB → VD 41.41 m/seg 0 0 AB xrBD AB x AB xrAB 2 AB xVD AB a D 9 j 300 k 15 i 20 i x3 j 15 i 9 j 240 k (m/seg2) → a D 240.63 m/seg2 1-47.- Un anden se desplaza frente a una plataforma circular giratoria de 6 mi/hr (1 milla = 1609 m) (ver figura). La gente se pasa a la plataforma y se dirige en línea recta hacia el centro para salir por la escalera. Entre el anden y la plataforma giratoria hay contacto de rodamiento (las velocidades de los puntos de contacto son las mismas). Suponga que la gente camina con rapidez constante de 3 mi/hr respecto a la plataforma. Si se desea que la gente no experimente una aceleración lateral (en el plano horizontal) de más de 3 pie/seg2, calcular el radio requerido de la plataforma. P1-47 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 72 _____________________________________________________________________ Solución 1).- Movimiento del marco móvil plataforma y del punto base “O”: P a).-Movimiento del marco móvil: VP k r X 0 Si: VP 6 1 pie mi 1609 m 1 hr pie * 8.8 * * 1 mi hr 3600 0.3048 m seg Luego: P1-47a 8.8 k (rad/seg) y 0 r b).- Velocidad y aceleración del punto base o conveniente “O”: VO aO 0 2).- Cálculo del movimiento de P respecto al marco móvil : rOP r j VP 3 * 1 1609 j 4.4 j (pie/seg) * 3600 0.3048 aP 0 3).- Cálculo del radio, obteniendo la aceleración del hombre “P” en el marco inercial tierra: aP 0 0 0 aO a P xrOP 2 rOP 2 xVP aP 8.8 2 8.8 8.8 2 8.8 2 r j k x j i j (pie/seg2) 2 * 4 . 4 r r r r2 Si: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ aP 3 2 r 2 1332.656 8.8 2 2 r 9 2 73 11 993.9072 r2 r 36.5 pies 1-48.- La placa metálica del figura está unida a una junta esférica de soporte en O. El pasador A se desliza en una ranura de la placa. En el instante mostrado XA =1m, dXA/dt = - 3 m/seg, d2XA/dt2 = 4 m/seg2 y que la velocidad y aceleración angulares de la placa son 4 j 2 k (rad/seg) y 3 i 6 j (rad/seg ). ¿Cuáles son las componentes x,y,z de la velocidad y aceleración de A respecto a un marco de referencia sin rotación que está en reposo respecto a O? 2 P1-48 Solución 1).- Movimiento del marco móvil placa y del punto base O: 4 j 2 k 3i 6j (rad/seg) y (rad/seg2) VO aO 0 2).- Movimiento de A respecto al marco móvil: rOA x Ai y A j i 0.25 j (m) V A x Ai y A j 3 i 0.5 *1* 3 j 3 i 1.5 j (m/seg) a A xAi yA j 4 i 0.5 9 4 j 4 i 6.5 j (m/seg2) 3).- Cálculo de la velocidad y aceleración de P en el marco inercial: 0 V A VO x rOA V A 4 j 2 k x i 0.25 j V A 4 k 2 j 0.5 i 3 i 1.5 j Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 74 _____________________________________________________________________ V A 3.5 i 0.5 j 4 k (m/seg) 0 a A aO x rOA x x rOA 2 x V A a A x rOA 3 i 6 j xi 0.25 j 0.75 k 6 k 6.75 k (m/seg2) x x rOA 4 j 2k x 0.5i 2 j 4k 16i 2k 4i j 20i j 2k (m/seg2) 2 x V A 8 j 4k x 3i 1.5 j 24k 6i 12 j 6i 12 j 24k (m/seg2) Luego: a A 20 6 4 i 1 12 6.5 j 6.75 2 24 k a A 10 i 6.5 j 19.25 k (m/seg2) 1-49.- Cerca del final de su carrera de despegue, el avión está “basculante” (con el morro hacia arriba) inmediatamente antes de entrar en sustentación. Su velocidad y aceleración, expresadas en función del tren de ruedas C, son VC y aC, ambos dirigidas horizontalmente hacia delante. El ángulo de cabeceo es θ y su variación por unidad de tiempo aumentando a razón . Si una persona A camina hacia delante por el pasillo central con una velocidad y aceleración Vrel y arel, ambos medidas hacia delante con relación a la cabina, deducir las expresiones de la velocidad y aceleración de A que observaría alguien inmóvil en la tierra. P1-49 Solución 1).- Movimiento del marco móvil avión y del punto base o conveniente “C”: k y k VC VC cos i sen j y aC aC cos i sen j Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 75 2).- Movimiento de A respecto al marco móvil: rCA L i h j , Vrel V A L i i a rel a A L y 3).- Cálculo de la velocidad y aceleración de A respecto al marco inercial tierra : V A VC Vrel x rCA VC cos i sen j L i k x L i h j V A VC cos h L i L VC sen j (Unid. de velocidad) a A aC arel x rOA 2 rCA 2 x Vrel i k x L i h j 2 L i h j 2 k x L i a A aC cos i sen j L h L 2 i a sen L 2 h 2L j (Unid. de aceleración) a A aC cos L C 1-50.- Un hombre camina hacia el exterior de una plataforma giratoria a lo largo de una trayectoria sinusoidal fijo a la plataforma; ésta tiene 40 pies de diámetro y gira a 10 RPM (ver figura). Si la rapidez del hombre relativa a la plataforma es constante e igual a 2 pie/seg. ¿Cuál es la magnitud de su aceleración cuando el se encuentra a 10 pies del centro? P1-50 1).- Movimiento del marco móvil disco k 10 * 30 k 3 Solución y del punto base o conveniente “O”: k (rad/seg) y 0 VO aO 0 2).- Movimiento del hombre respecto al marco móvil : Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 76 _____________________________________________________________________ rOH 10 i (pies) 2 Vh 2 x 4 * x * cos 2 2 x 2 y 2 x 2 10 10 4 x 2 2 2 * x 4 2 * x 2 * cos 2 25 10 Para, x = 10 pies: 4 x 2 4 2 2 *10 2.58 x 2 * x 2 * cos 2 25 10 x 2 1.55 x 1.245 pies/seg Luego: Vh 1.245 i 2 *1.245 j 1.245 i 1.565 j (pie/seg) 5 ah ? Cálculo de la curvatura para x = 10 pies: 2 * x 2 2 sen 10 10 2 1 c 2 4 2 * x cos 1 10 10 3 → 2 1 c 0 Luego: a h Vg et 0 0 Vh2 c en 0 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 2 2 * x 4 2 2 * x 0 x y x * x * cos * x * sen 10 10 10 5 2 2 77 2 2 Para, x = 10 pies: 0 x2 4 2 2 x x y 0 25 3).- Cálculo de la aceleración del hombre en el marco de referencia inercial tierra: ah 0 0 0 aO a h x rOh x x rOh 2 x Vh x rOh 3 k x 10 i x x rOh 2 x Vh 3 k x 10 j 3 10 10 2 j i 10.97 i (pie/seg2) 3 9 2 k x 1.245 i 1.565 j 3.28 i 2.6 j (pie/seg2) 3 a h 3.28 10.97 i 2.6 j 14.25 i 2.6 j (pie/seg2) → a h 14.49 pie/seg2 1-51.- El disco gira alrededor de su eje con rapidez angular constante ω0 = 0.1 rad/seg. El alambre de contorno circular está unido rígidamente a en los puntos A y B, como se muestra en la figura. Un insecto camina sobre el alambre de A a B. Encuentre la velocidad y aceleración del insecto relativa al marco de referencia (en el cual gira el disco) al llegar a B, si: a) La rapidez relativa al alambre (inicialmente cero) crece a razón de 0.001 m/seg2 y b) La velocidad relativa al alambre (inicialmente cero) crece a razón de 0.001 m/seg2. C O P1-51 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 78 _____________________________________________________________________ Solución Para ambos casos el marco móvil es el disco y el punto base o conveniente es el punto C 1).- Para el caso en que la rapidez crece a razón de 0.001 m/seg2.a).- Moviendo del marco móvil y del punto base C: O 0.1 k (rad/seg) y 0 VC O x rOC 0.1 k x 0.3 i 0.3 j 0.03 i 0.03 j (m/seg) aC O2 rOC 0.01 0.3 i 0.3 j 0.003 i 0.003 j (m/seg2) b).- Movimiento del insecto respecto al marco móvil (trayectoria circular): Si: r 0.001 3.33x10 3 rad/seg2 También: 0 0 3 2 0 2 0 2 * 3.33x10 3 * 0.0314 2 → 0.177 rad/seg Luego: rCB 0.3 i (m) V i r et 0.177 * 0.3 j 0.0531 j (m/seg) a i r et 2 r en 0.001 et 0.0314 * 0.3 en a i 0.00942 i 0.001 j (m/seg2) c).- Cálculo de la velocidad y aceleración del insecto en : V i VC V i x rCB 0.03 i 0.03 j 0.0531 j 0.1 k x 0.3 i Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 79 V i 0.03 i 0.03 0.0531 0.03 j 0.03 i 0.0531 j (m/seg) V i 0.061 m/seg → V i 61 mm/seg a i aC a i x rCB 02 rCB 2 x V i 0 a i aC a i 0.01 0.3 i .2 k x 0.0531 j a i 0.003 0.0106 0.003 0.00942 i 0.003 0.001 j a i 1.2 x10 3 i 4 x10 3 j (m/seg2) → a i 4.176 x10 3 m/seg ó a i 4.176 mm/seg2 2).- Para el caso en que la velocidad crece a razón de 0.001 m/seg 2.a).- Es lo mismo del acápite anterior a) b).- Movimiento del insecto respecto al marco móvil: Si: 3 2 2 2 3 Para la aceleración, en coordenadas naturales: 0.0012 2 r 2 r 2 2 3.52 x10 4 2 rad/seg2 y 0.0012 2 9 22 0.32 0.0576 rad/seg Luego: rCB 0.3 i (m) V i 0.0578 * 0.3 et 0.01728 j (m/seg) a i 3.54 x10 4 * 0.3 et 1x10 3 en 1x10 3 i 1.06 x10 4 j (m/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 80 _____________________________________________________________________ c).- Cálculo de la velocidad y aceleración del insecto en : V i 0.03 i 0.03 j 0.01728 j 0.1 k x 0.3 i 0.03 i 0.03 0.03 0.01734 j V i 0.03 i 0.01728 j V i 0.03462 m/seg ó V i 34.62 mm/seg a i aC a i 0.01 0.3 i 0.2 k x 0.01728 j a i 0.003 0.001 0.003 0.0035 i 0.003 1.06 x10 4 j a i 0.0025 i 0.0031 j (m/seg2) a i 3.98 x10 3 m/seg2 ó a i 3.98 mm/seg2 1-52.- Una atracción de un parque de atracciones consiste en una torre vertical estacionaria con brazos que pueden girar hacia fuera de la torre, al mismo tiempo, pueden girar alrededor de la misma. En los extremos de los brazos, las cabinas que contienen a los pasajeros pueden rotar respecto a los brazos. Consideremos el caso donde θ = 90°, en el que la cabina A gira con una velocidad angular 2 y una aceleración angular 2 ambos relativos al brazo BC, el cual gira con una velocidad angular 1 y una aceleración angular 1 ambos relativos a la torre y θ está creciendo uniformemente con velocidad angular 3 ¿Cuáles son ω3 la velocidad angular y la aceleración angular respecto al terreno? Utilizar: 1 0.3 rad/seg, 1 0.2 rad/seg2, 2 0.6 rad/seg, 2 0.1 rad/seg2 y 3 0.8 P1-52 rad/seg. Solución 1).- Cálculo de la velocidad angular de A respecto al marco inercial tierra : Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 81 _____________________________________________________________________ A CB A CB 1 3 2 0.3 k 0.8 i 0.6 i A 0.2 i 0.3 k (rad/seg) 2).- Cálculo de la aceleración angular de A respecto al marco inercial tierra : A 0 1 3 1 x 3 2 1 3 x 2 A 0.2 k 0.3 k x 0.8 i 0.1 i 0.3 k 0.8 i x 0.6 i A 0.1 i 0.06 j 0.2 k (rad/seg2) 1-53.- El robot de la figura tiene cinco grados de libertad de rotación. Los ejes xyz están fijos al anillo de la base, que gira en torno al eje z a la velocidad ω1. El brazo O1O2 gira en torno al eje x a la velocidad ω2 = . El brazo O2A gira en torno al eje O1O2 a la velocidad ω3 y a la velocidad ω4 = en torno a un eje perpendicular que pasa por O2 y que está momentáneamente paralelo al eje x. Finalmente, la garra gira en torno al eje O 2A a la velocidad ω5. Los módulos de estas velocidades angulares son constantes. Para la configuración representada hallar los vectores velocidad y aceleración angulares, Para θ = 60°, β = 45° y: a) ω1 = 2 rad/seg, ω2 = 1.5 rad/seg, ω4 =3 rad/seg y ω3 = ω5 =0, determinar asimismo la aceleración angular del brazo O1O2, b) ω3 = 3 rad/seg, ω5 = 2 rad/seg y ω1 = ω2 = ω4 =0 y c) ω1 = 2 rad/seg, = 2 rad/seg y ω3 = ω4 = ω5 = 0, así mismo encuentre el módulo de la velocidad angular. P1-53 Z 45º 15º Solución 1).-Para a): a).- Por el teorema de adición: A 4 2 1 3 i 1.5 i 2 k 60º (1) Y P1-53a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 82 _____________________________________________________________________ A 1.5 i 2 k (rad/seg) b).- Cálculo de la aceleración angular, derivando (1) respecto al tiempo en : A 0 4 O1O2 0 0 x 4 2 A x 2 1 A 2 1 x 4 A x 2 A 1.5 i 2 k x 3 i (1.5 i 2 k ) x 1.5 i 6 j 3 j 3 j (rad/seg2) c).- Cálculo de la aceleración angular del brazo O1O2.Derivando: O1O 2 2 1 Luego: O1O 2 1 x 2 2 k x 1.5 i 3 j (rad/seg2) 2).- Para b): A 3 5 3 cos 60 j sen60 k 2 cos 15 j sen15 k A 3.43 j 3.12 k (rad/seg) A 3 x 5 1.5 j 2.6 k x1.93 j 0.52 k A 0.78 i 5.02 i 4.24 i (rad/seg2) 3).- Para c): A 2 1 1.5 i 2 k (rad/seg) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 83 A 2.5 rad/seg A 1 x 2 2 k x 1.5 i 3 j (rad/seg2) 1-55. - La deslizadera A se mueve por una ranura parabólica con una velocidad s = 3 m/seg y s = 1 m/seg2 en el instante mostrado en el diagrama. El cilindro está conectado con A mediante la biela AB. Hallar: a) La velocidad y aceleración angular del cilindro para el instante mostrado y b) La aceleración angular de la biela AB. Y 4X 2 Solución 1).- Cálculo del movimiento de B tomando como punto de referencia C en (ver figura P1-54a): P1-54 et VB r et 0.9 cos i sen j VB 0.626 i 0.647 j (m/seg) VB C (1) B a B 0.626 i 0.647 j 2 0.647 i 0.626 j et en a B r et r en 2 α = 45.967º P1-54a a B 0.626 0.6472 i 0.647 0.6262 j (2) 2).- Cálculo del movimiento de B tomando como punto base A, donde el marco móvil es la biela AB.a).- Movimiento del marco móvil AB y del punto base A.i).- Movimiento del marco móvil: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 84 _____________________________________________________________________ AB AB k AB AB k y ii).- Movimiento del punto base o conveniente A: VA s et' 3 i (m/seg) a A s et' s 2 en' i c 9 c j (3) Si: d 2Y 1 c dX 2 2 1 dY dX 3 2 dY d 2Y 8X y 8 dX dX 2 Luego: 1 C 8 0 1 64 X 2 3 8 2 En (3): a A i 72 j (m/seg2) b).- Movimiento de B en AB: rAB 2.5 cos 75 i sen75 j 0.647 i 2.415 j (m) VB AB aB 0 AB c).- Movimiento de B en : 0 VB V A VB AB x rAB 3 i AB k x 0.647 i 2.415 j AB Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ VB 3 2.415 AB i 0.647 AB j 85 (4) 0 0 2 a B a A a B AB k x rAB AB rAB 2 AB x VB AB AB 2 0.647 i 2.415 j a B i 72 j AB k x 0.647 i 2.415 j AB 2 2 a B 1 2.415 AB 0.647 AB i 72 0.647 AB 2.415 AB j (5) 3).- Ecuaciones de compatibilidad.a).- Si: (1) = (4), igualando componentes y operando: 0.647 0.647 AB AB 0.626 3 2.415 AB → 3.041 3 0.987 rad/seg b).- Si: (2) = (5), igualando componentes y operando: 0.626 0.647 * 0.987 2 1 2.415 AB 0.647 * 0.987 2 0.626 1 2.415 AB (6) 0.647 0.626 * 0.987 2 72 0.647 AB 2.415 * 0.987 2 0.647 69.04 0.647 AB (7) (6) ÷ (7): 0.968 1 2.415 AB 69.04 0.647 AB 66.83 0.626 AB 1 2.415 AB → AB 21.65 rad/seg2 En (6): Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 86 _____________________________________________________________________ 0.626 1 2.415 * 21.65 → 85.12 rad/seg2 1-55.- En el instante que se muestra, una barra gira alrededor de su eje vertical con velocidad angular ω1 = 10 rad/seg y aceleración angular α1 = 10 rad/seg2, mientras el collarín que aparece en la figura se desliza hacia abajo con relación a la barra. Determine la velocidad y aceleración del collarín en el instante que se muestra. Usando coordenadas cilíndricas, esféricas y movimiento en marcos móviles. Solución 1).- Utilizando coordenadas cilíndricas: a).- Orientación de los vectores unitarios de las coordenadas (ver figura P1-55a) e identificación de los parámetros que definen el movimiento. tg P1-55 Z 5.385 1.795 60.88 3 O 5.385 m Vsen 5sen60.88 4.368 m / seg asen 2sen60.88 1.747 m / seg 2 1 10 rad / seg 5m 38 . 5 ez / seg 2 1 10 rad Z 5 cos 60.88 2.43 m / seg Z 2 cos 60.88 0.973 m / seg 2 C e e b).- Cálculo de la velocidad y aceleración de C: VC e e Z eZ 4.368 e 5.385 *10 e 2.433 eZ VC 4.368 e 53.85 e 2.433 eZ P1-55a VC 54.08 m/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 87 aC 2 e 2 e Z eZ aC 1.747 5.385 *100 e 2 * 4.368 *10 5.385 *10 e 0.973 eZ aC 536.753 e 141.21 e 0.973 eZ aC 555.02 m/seg2 2).- Utilizando coordenadas esféricas.a).- Orientación de los vectores unitarios de las coordenadas (ver figura P1-55b) e identificación de los parámetros que definen el movimiento. r 6.164 m 180 60.88 119.92 r 5 m / seg 0 r 2 m / seg 2 0 1 10 rad / seg C 1 10 rad / seg 2 e eerr b).- Cálculo de la velocidad y aceleración de C: e P1-55b VC r er r e r sen e 5 er 6.164 *10 sen119.12 e VC 5 er 53.85 e VC 54.08 m/seg aC r r 2 sen 2 er r 2 sen cos e 2r sen r sen e aC 2 6.164 *100 sen 119.12 er 6.164 *100 sen 119.12 cos 119.12e 2 * 5 *10 6.164 *10 sen 119.12e aC 468.425 er 262.05 e 141.21 e aC 555.01 m/seg2 3).- Utilizando movimiento en marcos móviles.- El marco móvil es la barra doblada (ver figura P1-55c): Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 88 _____________________________________________________________________ Z 21.8 60.88 a).- Movimiento de la coordenada móvil y del punto base o conveniente O: 1k 10 k 1 k 10 k O (rad/seg) (rad/seg2) Y VO aO 0 X C b).- Movimiento de C en el marco móvil: P1-55c rOC 5 i 2 j 3 k eOC 0.811 i 0.324 j 0.487 k VC V XY cos i V XY sen j VZ cos k VC 5 sen 60.88 cos 21.8 i 5 sen 60.88sen 21.8 j 5 cos 60.88 k VC 4.055 i 1.62 j 2.435 k aC 2 sen 60.88 cos 21.8 i 2 sen 60.88sen 21.8 j 2 cos 60.88 k aC 1.622 i 0.648 j 0.974 k c).- Movimiento de C en el marco inercial: VC VC x rOC 4.055 i 1.62 j 2.435 k 10 k x 5 i 2 j 3 k VC 15.945 i 51.62 j 2.435 k (m/seg) → VC 54.08 m/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ aC aC x rOC x x rOC 2 x VC x rOC 10 k x 5 i 2 j 3 k 20 i 50 j (m/seg2) x x rOC 10 k x 20 i 50 j 500 i 200 j 89 (m/seg2) 2 x VC 20 k x 4.055 i 1.62 j 2.435 k 32.4 i 81.1 j (m/seg2) Luego: aC 1.622 20 500 32.4 i 0.648 50 200 81.1 j 0.974 k aC 550.778 i 68.252 j 0.974 k aC 554.995 555 m/seg2 1-56.- En la posición representada la varilla delgada se mueve con una velocidad constante u = 75 mm/seg hacia el extremo del tubo BC. Al mismo tiempo el tubo BC gira a la velocidad angular constante ω2 = 1.5 rad/seg respecto al brazo CD. Sabiendo que todo el conjunto gira alrededor del eje X a la velocidad constante ω 1 = 1.2 rad/seg, hallar la velocidad y aceleración del extremo A de la varilla. Usando coordenadas cilíndricas en DC y movimiento en marcos móviles. P1-56 Y Solución 1).- Usando coordenadas cilíndricas en DC.a).- Orientación de los vectores unitarios, que definen las coordenadas cilíndricas en DC (ver figura P1-56a): D en et e en eZ C Z et e X A P1-56a e eZ b).- Movimiento del marco móvil y del punto base C en el marco inercial Tierra.- Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 90 _____________________________________________________________________ i).- Movimiento del marco móvil: CD 1e 1.2 e (rad/seg) y CD 0 ii).- Cálculo de la velocidad y aceleración del punto base C: VC 1rDC et 1.2 * 225 e 270 e (mm/seg) aC 12 rDC en 1.2 2 * 225 eZ 324 eZ (mm/seg) c).- Movimiento de A respecto al marco móvil DC: rCA 150 e (mm) VA CD aA CD e e 75 e 150 *1.5 e 75 e 225 e (mm/seg) 2 e 2 e 150 *1.5 2 e 2 * 75 *1.5 e 337.5 e 225 e (mm/seg2) d).- Movimiento de A en el marco inercial tierra: V A VC V A CD CD x rCA 270 e 75 e 225 e 1.2 e x 150 e V A 75 e 45 e (mm/seg) → V A 87.46 mm/seg a A aC a A CD 0 CD x CD x rCA 2CD x V A CD aC a A CD 2.4 e x75 e 225 e a A 337.5 e 225 e 324 540 eZ 337.5 e 225 e 864 eZ Y a A 954.48 (mm/seg ) 2 2).- Usando, movimiento en marcos móviles.D a).- Movimiento del marco móvil BC y del punto el marco tierra (ver figura P1-56b): base C en X C A Z i).- Movimiento del marco móvil: P1-56b Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ CB 1 2 1.2 i 1.5 k 91 (rad/seg) CB 1 x 2 1.2 i x 1.5 k 1.8 j (rad/seg2) ii).- Cálculo de la velocidad y aceleración el punto base o conveniente C: VC 1 x rDC 1.2 i x 225 k 270 j (mm/seg) aC 12 rDC 1.2 2 225 k 324 k (mm/seg2) b).- Movimiento de A en el marco móvil CB: rCA 150 i (mm) VA aC 75 i (mm/seg) CB 0 CB c).- Movimiento de A en el marco inercial tierra: V A VC V A CB CB x rCA 270 j 75 i 1.2 i 1.5 k x 150 i V A 75 i 45 j (mm/seg) → V A 87.46 mm/seg a A aC CB x rCA CB x CB x rCA 2CB x V A CB x rCA 1.8 jx 150 i 270 k CB (mm/seg2) CB x CB x rCA 1.2 i 1.5 k x225 j 337.5 i 270 k 2CB x V A (mm/seg2) 2.4 i 3 k x 75 i 225 j (mm/seg2) Cb Luego: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 92 _____________________________________________________________________ a A 324 k 270 k 337.5 i 270 k 225 j a A 337.5 i 225 j 864 k (mm/seg2) → a A 954.48 mm/seg2 1-57.- En un instante dado, la flecha AB está girando, como se muestra alrededor del eje X a una velocidad angular ωAB = 5 rad/seg y una aceleración angular αAB = 4 rad/seg2. En el mismo instante, el eslabón CD que está sujeto por un perno en C a AB, está girando en el sentido de la manecillas del reloj, como se muestra, con una velocidad angular ωCD = 2 rad/seg y una aceleración angular αCD = 3 rad/seg2. Determine la velocidad y aceleración de la punta D del eslabón en el instante que se muestra. Usando coordenadas cilíndricas, esféricas y movimiento en marcos móviles. z Solución 1).- Usando coordenadas cilíndricas: P1-57 a).- Orientación de los vectores unitarios de las coordenadas (ver figura P1-57a) e identificación de los parámetros que definen el movimiento: sen 2 sen60 1.73 C m CD cos 2 * 2 * cos 60 2 m/seg 2m. 2 CD cos CD sen 3 * 2 cos 60 4 * 2 * sen60 3.93 m/seg 5 rad/seg 4 rad/seg2 ez z 2 P1-57a D e e Z cos Z CD sen 2 * 2 sen60 3.464 m/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 93 2 Z CD sen CD cos Z 3 * 2 sen60 4 * 2 cos 60 9.196 m/seg2 b).- Cálculo de la velocidad y aceleración de D en el marco inercial tierra: VD e e Z eZ 2 e 1.73 * 5 e 3.464 eZ VD 2 e 8.65 e 3.464 eZ VD 9.53 m/seg a D 2 e 2 e Z eZ a D 3.93 1.73 * 25 e 2 * 2 * 5 1.73 * 4 e 9.196 eZ a D 47.18 e 26.92 e 9.196 eZ (m/seg2) → a D 55.09 m/seg2 2).- Usando coordenadas esféricas.- C a).- Orientación de los vectores unitarios de las coordenadas (ver figura P1-57b) e identificación de los parámetros que definen el movimiento: r 2 m 60 5 rad / seg r 0 2 rad / seg r 0 3 rad / seg 2 4 rad / seg 2 r D e b).- Cálculo de la velocidad y aceleración de D en el marco inercial tierra: VD r e r sen e 2 * 2 e 2 * 5 sen60 4 e 8,66 e e er P1-57b VD 9.539 m/seg a D r 2 r 2 sen 2 er r r 2 sen cos e 2r cos r sen e Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 94 _____________________________________________________________________ a D 2 * 4 2 * 25 sen 2 60 er 2 * 3 2 * 25 sen 60 cos 60 e 2 * 2 * 2 * 25 cos 60 2 * 4 sen 60 e a D 45.5 er 15.65 e 26.93 e (m/seg2) → a D 55.14 m/seg2 3).- Usando movimiento en marcos móviles.- El marco móvil es la barra AB y el punto base C.a).- Movimiento del marco móvil y del punto base: AB i 5 i (rad/seg) AB i 4 i (rad/seg2) VC aC 0 b).- Cálculo del movimiento de D respecto al marco móvil AB: rCD 2 cos 60 i sen60 j i 1.73 j (m) VD aD aD AB AB CD x rCD 2 k x i 1.73 j 3.46 i 2 j (m/seg) 2 CD x rCD CD rCD 3k x i 1.73 j 4i 1.73 j 9.19 i 3.92 j AB c).- Movimiento de D en el marco inercial tierra: VD VD AB x rCD 3.46 i 2 j 5 i x i 1.73 j VD 3.46 i 2 j 8.65 k aD aD AB VD 9.529 m/seg x rCD x x rCD 2 x VD x rCD 4 i x i 1.73 j 6.92 k AB (m/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ x x rCD 5 i x 8.65 k 43.25 j 2 x VD AB 95 (m/seg2) 10 i x 3.46 i 2 j 20 k (m/seg2) Luego: a D 9.19 i 3.92 43.25 j 6.92 20 k a D 9.19 i 47.17 j 26.92 k (m/seg2) a D 55.083 m/seg2 1-58.- Un robot mueve un cuerpo sujetado mediante sus mordazas G como se muestra en el diagrama. ¿Cuáles serán la velocidad y la aceleración relativas al terreno, del punto A, en el instante que se muestra? El brazo EH está soldado al eje vertical MN. El brazo HKG es una barra rígida que gira alrededor de EH. Usando coordenadas cilíndricas en EH y movimiento en marcos móviles. Solución 1).- Usando coordenadas cilíndricas: a).- Cálculo del movimiento de A respecto al marco móvil EH: P1-58 i).- Orientación de los vectores unitarios de las coordenadas (ver figura P1-58a) e identificación de los parámetros que definen el movimiento: 0.1 m 0 0 0.4 rad / seg X 0 X 0 0.3 rad / seg 2 e ex x P1-58a e ii).- Cálculo de la velocidad y aceleración de A en EH: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 96 _____________________________________________________________________ rHA 0.1 e 0.3 e X (m) V A e 0.1 * 0.4 e 0.04 e (m/seg) EH aA aA EH EH 2 e e 0.1* 0.4 2 e 0.1* 0.3 e 0.016 e 0.03 e (m/seg2) b).- Movimiento del marco móvil EH y del punto base H: 0.2 e (rad/seg) y 0.1 e (rad/seg2) VH x rEH 0.2 e x 0.4 e X 0.08 e (m/seg) a H x rEH 2 rEH 0.1 e x 0.4 e X 0.040.4 e X 0.04 e 0.016 e X (m/seg2) c).- Cálculo de la velocidad y aceleración de A en el marco inercial terreno: V A VH V A EH x rHA 0.08 e 0.04 e 0.2 e x 0.1 e 0.3 e X V A 0.12 0.06 e 0.18 e (m/seg) → a A aH a A EH V A 0.18 m/seg x rHA x x rHA 2 x V A EH x rHA 0.1 e x 0.1 e 0.3 e X 0.03 e (m/seg2) x x rHA 0.2 e x 0.06 e 0.012 e X (m/seg2) 2 x V A EH 0.4 e x 0.04 e 0.016 e X (m/seg2) Luego: a A 0.016 e 0.03 0.04 0.03 e 0.016 0.012 0.016 e X a A 0.016 e 0.1 e 0.044 e X (m/seg2) → a A 0.11 m/seg2 2).- Usando movimiento en marcos móviles.- Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 97 a).- Movimiento del marco móvil EH y del punto base H: 1 0.2 j (rad/seg) y 1 0.1 j (rad/seg2) VH x rEH 0.2 j x 0.4 i 0.08 k (m/seg) a H x rEH 2 rEH 0.1 j x 0.4 i 0.2 2 0.4 i a H 0.016 i 0.04 k (m/seg2) b).- Movimiento de A en el marco móvil: rHA 0.3 i 0.1 j (m) VA aA aA EH EH 2 x rHA 0.4 i x 0.3 i 0.1 j 0.04 k (m/seg) 2 x rHA 2 x 2 x rHA 0.3 i x 0.3 i 0.1 j 0.4 i x 0.04 k 0.016 j 0.03 k (m/seg2) EH c).- Cálculo de la velocidad y aceleración de A respecto al marco inercial terreno: V A VH V A EH x rHA 0.08 k 0.04 k 0.06 k V A 0.18 k (m/seg) a A aH a A EH → V A 0.18 m/seg x rHA x x rHA 2 x V A x rHA 0.1 j x 0.3 i 0.1 j 0.03 k (m/seg2) x x rHA 0.2 j x 0.06 k 0.012 i 2 x V A EH (m/seg2) 0.4 j x 0.04 k 0.016 i (m/seg2) EH Luego: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 98 _____________________________________________________________________ a A 0.016 0.012 0.016 i 0.016 j 0.04 0.03 0.03 k a A 0.044 i 0.016 j 0.1 k (m/seg2) a A 0.11 m/seg2 1-59.- En un instante dado, la grúa de torre está girando, mientras que el trole T se está moviendo hacia fuera a lo largo de la pluma con el movimiento indicado. En ese mismo instante, el cubo de concreto B, se está meciendo hacia a la vertical, de manera que = - 6 rad/seg y = 2 rad/seg2, ambas, medidas con respecto al trole. Si el cable AB se está acortando a una rapidez constante de 0.5 m/seg. Usando movimientos en marcos móviles, calcule la velocidad y aceleración de la punta C del cubo en ese instante. L Solución Marco móvil es el marco intermedio línea que coincide con el cable. 1).- Movimiento del marco móvil y del punto base A.P1-59 a).- Movimiento del marco móvil: k Si: u y u 2 2 u n x k i 2 2 2 i j u 2 j x k n u P1-59a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 99 Luego: 6 * 2 i j 3 2 i j (rad/seg) 2 2 i j 2 i j (rad/seg2) 2 2 * Luego: L 3 2 i j 0.2 k 4.243 i 4.243 j 0.2 k (rad/seg) L x 2 i j 0.2 k x 3 2 i j 0.15 k L 2 0.6 2 i 2 0.6 2 j 0.15 k L 2.263 i 0.566 j 0.15 k (rad/seg2) b).- Cálculo de la velocidad y aceleración del punto base A: VA VA aA aA PL PL x rOA 0.8 i 0.2 k x 20 i 0.8 i 4 j (m/seg) x rOA 2 rOA 2 x V A PL a A 0.6 i 0.15 k x 20 i 0.04 20 i 0.4 k x 0.8 i 0.6 0.8 i 3 0.32 j Y a A 1.4 i 2.68 j (m/seg2) 2).- Movimiento de C respecto al marco móvil: rAC 2 i 2 j 10 k VC L 2 i j 0.5 cos15.793k 0.5 sen15.793 2 2m VC L 2 2m 2m X Z P1-59b Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 100 _____________________________________________________________________ VC 0.096 i 0.096 j 0.481 k (m/seg) L aC 0 L 3).- Cálculo de la velocidad y aceleración de C en el marco inercial tierra: VC V A VC L x rAC L L x rAC i 4.243 2 j k 4.243 0.2 42.83 i 42.03 j 16.972 k (m/seg) 2 10 Luego: VC 0.8 0.096 42.83 i 4 0.096 42.03 j 0.481 16.972 k VC 43.726 i 46.126 j 16.491 k (m/seg) aC a A L x rAC L x L x rAC 2 L x VC L L x rAC i j k 2.263 0.566 0.15 5.36 i 22.93 j 5.658 k (m/seg2) 2 2 10 i j k L x L xrAC 4.243 4.243 0.2 63.606i 80.578 j 360.061k (m/seg2) 42.83 42.03 16.972 2 L x VC L i j k 8.486 8.486 0.4 4.12 i 4.043 j 1.629 k (m/seg2) 0.096 0.096 0.481 Luego: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 101 aC 1.4 5.36 63.606 4.12 i 2.68 22.93 80.578 4.043 j 5.658 360.061 1.629 k aC 63.446 i 96.785 j 356.032 k (m/seg2) 1-60.- El brazo AB está girando alrededor del pasador fijo A con una rapidez constante de ω1 = 4 rad/seg, mientras que labarra BD está girando alrededor del eje Z con una rapidez constante de ω 2 = 5 rad/seg. En el instante en que el mecanismo está en la posición indicada, el collarín C se está moviendo a lo largo de la barra con una velocidad de 3 m/seg y una aceleración de 2 m/seg2, medidas ambas, con respecto a la barra. Usando coordenadas cilíndricas en AB y coordenadas cartesianas, determine la velocidad y la aceleración respecto a la tierra del collarín en el instante mostrado. V a Solución 1).- Usando coordenadas cilíndricas en AB.P1-60 A a).- Orientación de los vectores unitarios de las coordenadas cilíndricas en AB (ver figura P1-60a): eZ C B e e b).- Movimiento del marco móvil AB y del punto base B: P1-60a AB 1e 4 e (rad/seg) y AB 0 VB 1rAB et 4 * 0.4 e 1.6 e (m/seg) a B 12 rAB en 4 2 * 0.4 eZ 6.4 eZ (m/seg2) c).- Cálculo del movimiento de C respecto al marco móvil AB.- Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 102 _____________________________________________________________________ i).- Identificación de los parámetros que definen el movimiento: 0.3m 5 rad / seg Z 0 3 m / seg 2 m / seg 2 0 Z 0 ii).- Movimiento de C: rBC 0.3 e (m) VC aC AB AB e e 3 e 0.3 * 5 e 3 e 1.5 e (m/seg) 2 e 2 e 2 0.3 * 25 e 2 * 3 * 5 e 5.5 e 30 e (m/seg2) d).- Cálculo de la velocidad y aceleración de C respecto al marco inercial terreno: VC VB VC AB AB x rBC 1.6 e 3 e 1.5 e 4 e x 0.3 e VC 1.4 e 1.5 e 1.2 eZ (m/seg) → VC 2.377 m/seg aC a B aC AB AB x AB x rBC 2 AB x VC AB Donde: AB x AB x rBC 4 e x 1.2 eZ 4.8 e 2 AB x VC AB (m/seg2) 8 e x 3 e 1.5 e 2.4 eZ (m/seg2) Luego: aC 6.4 eZ 5.5 e 30 e 4.8 e 24 eZ 10.3 e 30 e 17.6 eZ (m/seg2) aC 36.275 m/seg2 2).- Usando coordenadas cartesianas (indicados en la figura P1-60).a).- Movimiento del marco móvil BD y del punto conveniente B: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ BD 1 2 4 i 5 k 103 (rad/seg) BD 1 x 2 4 i x 5 k 20 j (rad/seg2) VB 1 x rAB 4 i x 0.4 k 1.6 j (m/seg) a B 12 rAB 16 0.4 k 6.4 k (m/seg2) b).- Movimiento de C respecto al marco móvil BD: rBC 0.3 j (m), VC BD 3 j (m/seg) y aC 2 j (m/seg2) BD c).- Cálculo de la velocidad y aceleración de C, respecto al marco inercial terreno: VC VB BD x rBC VC VC 1.5 i 1.4 j 1.2 k 1.6 j 4 i 5 k x 0.3 j 3 j BD → VC 2.377 m/seg aC a B BD x rBC BD x BD x rBC 2 BD x VC BD aC BD Donde: BD x rBC 20 j x 0.3 j 0 BD x BD x rBC 4 i 5 k x 1.5 i 1.2 k 12.3 j 2 BD x VC BD (m/seg2) 2 4 i 5 k x 3 j 30 i 24 k (m/seg2) Luego: aC 6.4 k 12.3 j 30 i 24 k 2 j 30 i 10.3 j 17.6 k (m/seg2) aC 36.275 m/seg2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 104 _____________________________________________________________________ 1-61.- La barra delgada y curva OC gira alrededor de =. En el instante que se muestra, la velocidad angular OC es 2 rad/seg y su aceleración angular es cero. Encuentre la aceleración angular de la barra AB en la misma posición. 0 X P1-61 C Solución 1).- Cálculo de la velocidad y aceleración de B tomando como punto de referencia a O en ℑ.- P1-61a a).- Cálculo de la velocidad y aceleración de B’ (B’ ε a OC coincidente con B), ver figura P1-61a: VB ' OC x rOB ' 2k x 16 j 32 i (plg/seg) 2 a B ' OC rOB ' 4 * 16 j 64 j (plg/seg2) b).- Cálculo de la velocidad y aceleración de B respecto a OC: Si: VB aB aB OC OC VB i , OC aB ' 2 OC x VB aB OC aB t i OC VB2 OC 8 n j , VB VB ' VB y OC OC Luego: VB 32 i VB i 32 VB i OC OC (1) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ VB2 OC n j 64 j 2 2k x VB i OC 8 2 VB OC a B a B t i 4 VB 64) j OC OC 8 a B a B t i OC 105 (2) 2).- Cálculo de la velocidad y aceleración de B, tomando como punto de referencia a A en ℑ:a).- VB AB k x 10 cos 30º i sen30º j 5 AB i 8.66 AB j (3) (1) = (3) e igualando componentes: 8.66 AB 0 AB 0 0 32 VB 5 * AB OC VB 32 plg/seg OC 0 b).- 2 a B AB k x 10 cos 30º i sen30º j AB rAB a B 5 AB i 8.66 AB j (4) (2) = (4) e Igualando componentes: 32 2 4 * 32 64 8.66 AB 8 AB 7.39 64 8.66 AB rad/seg2 (antihorario) 1-62.- El pasador P es solidario de BC y desliza libremente por la ranura de OA. Usando coordenadas polares, hallar la variación del ángulo por unidad de tiempo ( ), sabiendo que BC se mueve con una celeridad constante V0. Exprese la solución en función de V0 , h, β y θ. P1-62 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 106 _____________________________________________________________________ Solución 1).- Orientación de los vectores unitarios e identificación del parámetro radial: Por Ley de Senos: B 90 h V0 sen e h cos h cos sen e P O P1-62a 2).- Cálculo de la velocidad angular de OA: Si: VP e e y VP V0 cos e sen e Igualando la componente transversal: V0 sen → h cos V0 sen sen V0 sen 2 (Unid. De Velocidad angular) h cos 1-63.- En el instante dado, la escalera de un camión de bomberos gira alrededor del eje vertical z con una velocidad angular de ω1 0 0.20 rad/seg y una aceleración angular α1 = 0.5 rad/seg2, mientras se está elevando a una velocidad angular constante ω2 = 0.75 rad/seg, como se indica y la escalera superior se está subiendo con respecto a la inferior con una velocidad de 0.5 m/seg y desacelerándose a 0.1 m/seg2. Usando las coordenadas esféricas, determine la velocidad y aceleración del punto P del extremo de la escalera en el instante que se muestra. ω2 P1-63 Solución Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 107 1).- Orientación de los vectores unitarios e identificación de los parámetros que definen el movimiento en coordenadas esféricas (ver figura P1-63a): 10 14.142 m 45º sen 45º r 0.5m / seg 0.75 rad / seg r 0.1m / seg 2 0 Z r er e P e 45º 0.2 rad / seg 0.5 rad / seg 2 O P1-63a a).- Cálculo de la velocidad y aceleración de P: VP r er r e r sen e 05 er 14.142 * 0.75 e 14.142 * 0.2 * sen 45º e VP 0.5 er 10.61 e 2 e → VP 10.808 m/seg a P r r 2 r 2 sen 2 er 2r r 2 sen cos e 2r cos 2rsen rsen e 0.1 14.142 * 0.75 2 2 * 0.5 * 0.75 er a P e 2 2 2 14.142 * 0.2 sen 45º 14,142 * 0.2 sen45º 2 *14.142 * 0.75 * 0.2s cos 45º2 * 0.5 * 0.2 sen 45º14.142 * 0.5 sen 45º e a P 8.338 er 1.033 e 2.14 e (m/seg2) → aP 8.66 m/seg2 1-64.- Un aparato de un parque de diversiones tiene dos canastillas sujetas rígidamente a brazos de soporte, los cuales tienen libertad para girar verticalmente alrededor del pivote en O. El pivote está soportado por un poste vertical que en el instante dado gira a la velocidad angular constante ω1 = 2 rad/seg. Un pasajero está en sentado en una de las canastillas en el lugar indicado por P. Usando coordenadas cilíndricas, determine la aceleración del pasajero P, si los brazos de soporte está en la posición que se muestra (θ = 45º) y está girando alrededor del pivote O a la velocidad y aceleración angulares de ω2 = 0.5 rad/seg y α 2 = 0.5 rad/seg2 respectivamente. P1-64 Solución Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 108 _____________________________________________________________________ 1).- Orientación de los vectores unitarios e identificación de los parámetros que definen el movimiento en coordenadas cilíndricas (ver figura P1-64a): sen cos cos 2 O cos sen 2 Z cos 2 sen 22 = 20 pies eZ Z cos Z sen sen 2 e e P Z sen cos 2 sen 2 cos 22 P1-64a Para el caso específico de: 45º , 2 0.5 rad/seg y 2 0.5 rad/seg2 2 rad / seg 20 * sen45º 14.142 pies 20 * c0s 45º* 0.5 7.071 pie / seg 20 * cos 45º* 0.5 20 * sen45º* 0.5 2 10.607 pie / seg 2 0 Z 20 * sen45º* 0.5 7.071 pie / seg Z 20 * sen45º* 0.5 20 * cos 45º* 0.5 2 3.535 pie / seg 2 2).- Cálculo de la aceleración de P: a P 2 e 2 e Z eZ a P 10.607 14.142 * 4 e 2 * 7.071* 2 e 3.535 eZ a P 67.175 e 28.284 e 3.535 eZ (pie/seg2) → aP 72.972 pie/seg2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 1-65.- Un Perno en el extremo del brazo A de 3 pies de largo, sigue la trayectoria de la ranura circular del elemento CD, el cual se mueve hacia la derecha con una aceleración constante de 1 pie/seg2 partiendo del reposo cuando φ = 90º, Para el instante en que φ = 45º, usando coordenadas cartesianas calcule la velocidad y aceleración del perno B. 109 a Y P1-65 B D A X Solución 1).- Por intersección de trayectorias (ver figura P165a).a).- Cálculo de la posición de D, para un instante cualquiera:- Todo los puntos del elemento tienen el mismo movimiento por encontrarse en movimiento de traslación rectilíneo, luego: P1-65a X D X Do o a 1 2 X Do t X D t 2.6 0.5 t 2 2 b).- Determinación de las ecuaciones de las trayectorias, para un instante cualquiera de B: X 2 Y 2 9 (1) X X D 2 Y 2 1.52 2 → 1 2 2 X 2.6 a t Y 2.25 2 (2) 2).- Derivando (1) y (2) dos veces respecto al tiempo: 2 XX 2YY 0 XX YY 0 2 X 2.6 0.5 t 2 * X t 2YY 0 → (3) X 2.6 0.5 t 2 t X 2.6 t 0.5 t 3 0 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 110 _____________________________________________________________________ 2.6 t 0.5 t 3 X t X 2.6 0.5 t 2 (4) X 2 XX Y 2 YY 0 (5) X 2.6 0.5 t 2 t X X t X 2.6 1.5 t 2 0 2.6 1.5 t 2 X 2 t X X 2.6 0.5 t 2 (6) 3).- Para el caso específico de: Y 1.5sen45º 1.06 pies y X 9 1.062 2.806 pies En (2): 2.806 2.6 0.5 t 2 2 1.06 2 2.25 0.042 0.25 t 4 0.206 t 2 1.126 0 Z 2 0.824 Z 4.338 0 Z 0.824 0.824 2 4 * 4.338 0.412 2.123 2 Z 2.535 t 1.6 seg En (4): 2.6 *1.6 0.5 *1.6 3 2.806 *1.6 X 0.443 pie/se 2.6 0.5 *1.6 2 En (3): XX 2.806 * 0.443 Y 1.17 pie/seg Y 1.06 VB 0.443 i 1.17 j (pie/seg) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ En (6), X B 111 X D a : 2.6 1.5 *1.6 2.806 2 *1.6 * 0.443 X 0.57 pie/seg2 2.6 0.5 *1.6 2 2 En (5): 0.4432 2.806 * 0.57 1.17 2 1.06 YB 0 YB 2.985 pie/seg2 Luego: a B 0.57 i 2.985 j (pie/seg2) 1-66.- Un eje BC gira respecto a la plataforma A con una velocidad angular ω = 0.34 rad/seg. Una barra está soldada a BC y en el instante de interés está vertical. Un tubo está fijado a la barra vertical y dentro del mismo la cabeza de un pistón se está moviendo respecto al tubo con una velocidad V de 3 m/seg y con una aceleración P O de V de 0.4 m/seg2. La plataforma A tiene una velocidad angular relativas al terreno dada como ω2 = 0.8 rad/seg y con una aceleración angular de 0.5 rad/seg2. Hallar el vector aceleración de la cabeza del pistón relativa al terreno. O’ P1-66 Solución 1).- Cálculo del movimiento del marco móvil eje BC y barra soldada y del punto base O’: a).- Movimiento del Marco móvil: T 2 1 0.8 i 0.34 j (rad/seg) 0 T 2 1 2 x1 0.5 i 0.8 i x 0.34 j 0.5 i 0.272 k (rad/seg2) b).- Cálculo de la velocidad y aceleración de O’, como parte de A, en movimiento circular vertical: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 112 _____________________________________________________________________ VO' 2 x rOO ' 0.8 i x 0.2 j 0.16 k (m/seg) aO' 2 x rOO ' 22 rOO' 0.5 i x 0.2 j 0.8 2 0.2 j 0.128 j 0.1 k (m/seg2) 2).- Cálculo de la velocidad y aceleración de P: VP VP VO ' T x rO 'P 3 j 0.16 k 0.8 i 0.34 j x 0.1 j 0.6 k T VP 0.204 i 3.48 j 0.24 k (m/seg) → VP 3.494 m/seg a P a P aO ' T x rO 'P T x T x rO 'P 2 T x VP T T a P 0.4 j 0.128 j 0.1 k 0.5 i 0.272 k x 0.1 j 0.6 k 0.8 i 0.34 j x0.8 i `0.34 j x0.1 j`0.6 k 2 0.8 i 0.34 j x 3 j a P 0.27 i 0.828 j 4.65 k 0.384 k 0.064 j 0.069 k 0.027 i a P 0.892 j 5.103 k a P 5.18 m/seg2 → 1-67.- Para el instante mostrado, el aro circular gira alrededor = 5 rad/seg2. El bloque del eje vertical a = 20 rad/seg y se mueve con rapidez constante de 4 m/seg con respecto al aro. Usando coordenadas cilíndricas encuentre la aceleración del deslizador para el instante cuando θ = 90º. Ω eZ e O D e P1-67 Solución 1).- Orientación de los vectores unitarios e identificación de los parámetros que definen al movimiento en coordenadas cilíndricas, el instante pedido (ver figura P1-67a): P1-67a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 20 rad / seg Z 4a m / seg 4m 0 113 42 8 m 2 5 rad / seg 2 Z 0 2 2).- Cálculo de la aceleración del deslizador D: a D 2 e e 8 4 * 20 2 e 4 * 5 e a D 1608 e 20 e (m/seg2) → aD 1608.12 m/seg2 1-68.- Un collar desliza sobre la barra AB con una velocidad de 2 m/seg y una aceleración de 1 m/seg2 y la barra gira con respecto a su eje vertical a razón constante de 10 rad/seg. Usando coordenadas esféricas encuentre la velocidad y aceleración del collar, si = 1 m. A C P1-68 e Solución C er e 1).- Orientación de los vectores unitarios e identificación de los parámetros que definen el movimiento en coordenadas esféricas en el instante dado (ver figura P1-68a): P1-68a 126.87º 10 rad / seg r l 1m r 2 m! seg 0 r 1 m! seg 2 0 0 2).- Cálculo de la velocidad y aceleración del collar C: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 114 _____________________________________________________________________ VC r er r sen e 2 er 10 sen126.87º e VC 2 er 8 e /m/seg) → VC 8.246 m/seg aC r r 2 sen 2 er r 2 sen cos e 2 r sen e aC 1 100 sen 2 126.87º er 100 sen126.87º cos 126.87º e 40 sen126.87º e aC 63 er 48 e 32 e (m/seg2) → aC 85.42 m/seg2 1-69.- El brazo rasurado OA oscila en torno de O dentro de los límites indicados y arrastra a la manivela CP a través del pasador P. Durante un intervalo del movimiento, = k, constante. Hallar el valor de la correspondiente aceleración total de P para todo valor de comprendido entre los límites en que = k. Emplear las coordenadas polares r y . Demostrar que permanecen constantes los módulos de la velocidad y la aceleración de P en su trayectoria circular. e 1 e 2 P e 1 P1-69 e 2 C r Solución 1).- Orientación de los vectores unitarios e identificación de los parámetros que definen el movimiento en coordenadas polares (ver figura P1-69a): b a).- Para las coordenadas polares e 1 , e 1 en OA: r 2 b cos O P1-69a r 2 b sen Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 115 r 2 b cos 2 2 b sen Para: k y 0 : r 2 b cos r 2b k sen r 2b cos k 2 b).- Para las coordenadas polares e 2 , e 2 en OP(trayectoria circular): b 2 2 0 0 2 0 2).- Cálculo de la velocidad y aceleración de P, tomando como punto de referencia a O en ℑ: VP r e 1 r e 1 2b k sen e 1 2b cos k e 1 (Unid. de velocidad) VP 2b k Unidades de velocidad a P r r 2 e 1 2 r e 1 a P 2b cos k 2 2b cos k 2 e 1 4b sen k 2 e 1 a P 4b cos k 2 e 1 4b sen k 2 e 1 (Unid. de aceleración) → aP 4b k 2 Unid. de acelerac. 2).- Cálculo de la aceleración de P tomando como punto de referencia a C en ℑ (trayectoria circular): VP 2 e 2 b * 2 k e 2 2b k e 2 (unidades de velocidad) VP 2b k (unidades de velocidad) a P 22 e 2 b * 4 k 2 e 2 4b k 2 e 2 (Unid. de aceleración) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 116 _____________________________________________________________________ aP 4b k 2 Unid. de aceleración Los módulos de la velocidad y aceleración permanecerán constantes por depender de parámetros constantes. 1-70- Se muestra una sección superior de un aspersor. El agua entra en el centro desde abajo y luego pasa por los pasajes del impulsor. El impulsor está girando con una velocidad angular ω constante e igual a 8 RPM. El agua abandona el impulsor con una velocidad relativa de 3 m/seg y formando un ángulo de 30º respecto a r ¿Cuáles son la velocidad y la aceleración del agua respecto al terreno cuando ésta, abandona el impulsor? Si el radio de curvatura de la trayectoria de la partícula en el momento de interés con respecto al impulsor es ρc= 0.3 m. t n P' 60º P1-70 30º P t ' 30º n ' P/ R Solución Sea P la partícula y P’ un punto coincidente con P, perteneciente al impulsor: 1).- Cálculo de la velocidad y aceleración de P’ en ℑ (utilizando coordenadas naturales en el aspersor): R P1-69a a).- Orientación de los vectores unitarios que definen las coordenadas naturales (ver figura P1-69a): b).- Cálculo de la velocidad y aceleración de P’: VP ' r et 18 * 30 * 0.3 et 0.565 et (m/seg) a P ' 2 r en 1.066 en (m/seg2) 2).- Cálculo del movimiento de P respecto al aspersor ℜ: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 117 rPP ' 0 VP 3 sen30º et cos 30º en 1.5 et 2.6 en (m/seg) aP VP2 c 32 cos 30º et sen30º en 25.98 et 15 en (m/seg2) en ' 0.3 3).- Cálculo de la velocidad y aceleración de la partícula P respecto al terreno ℑ: VP VP ' VP 0.565 et 1.5 et 2.6 en 0.935 et 2.6 en (m/seg) VP 2.763 m/seg a P a P ' a P 2 x VP a P ' a P 3.77 eb x 1.5 et 2.6 en a P 25.98 9.802 et 1.066 15 5.65 en 16.178 et 10.411 en (m/seg2) a P 19.24 m/seg2 1-71.- Un avión de combate está aterrizando siguiendo un movimiento de traslación y tiene la siguiente aceleración respecto al terreno: a 0.2 g k 0.1 g j (m/seg2). Las ruedas se están extendiendo tal como se muestra. Usando coordenadas cilíndricas en el avión, encuentre la aceleración del centro de cada rueda respecto al terreno, en el instante que se muestra. Utilizar los datos siguientes: 0.3 rad / seg y A G 0.4rad / seg 2 P1-71 Solución 1).- Orientación de los vectores unitarios e identificación de los parámetros que definen el movimiento respecto al avión: Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 118 _____________________________________________________________________ A Y 45º G e X Z eZ e P1-71a i cos e sen e , j sen e cos e k eZ 1m 0 0 0.3 rad / seg 0.4 rad / seg 2 2).- Cálculo de la aceleración de G respecto al avión ℜ: aG 2 e e 1 * 0.32 e 1* 0.4 e aG 0.09 e 0.4 e (m/seg) 3).- Movimiento del marco móvil avión ℜ y del punto base A: 0 a A 0.2 g eZ 0.1 g sen e cos e 0.694 e 0.694 e 1.962 eZ (m/seg2) 4).- Cálculo de la aceleración del centro G de la rueda respecto al terreno: aG a A aG 0.694 0.09 e 0.694 0.4 e 1.962 eZ aG 0.604 e 1.094 e 1.962 eZ (m/seg2) → aP 2.326 m/seg2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 119 Y 1-72.- Los movimientos x e y de las guías A y B, cuyas ranuras forman ángulo recto, controlan el movimiento del pasador de enlace P, que resbala por ambas ranuras. Durante un corto intervalo esos movimientos están regidos por x = 20 + ¼ t2 e y = 15 – 1/6 t3, donde x e y son milímetros y t en segundos. Calcular los nódulos de la velocidad y la aceleración del pasador para t = 2 seg y calcular su curvatura en ese instante. X P1-72 Solución Las barras tienen movimiento de traslación. 1).- Ecuaciones del movimiento.- Utilizando las ecuaciones paramétricas: X 20 1 1 2 t (mm) y Y 15 t 3 (mm) 6 4 1 X t (mm/seg) 2 y 1 Y t 2 (mm!seg) 2 1 X (mm/seg2) 2 y Y t (mm!seg2) Luego: VP 1 1 t i t 2 j (m!seg) 2 2 aP y 1 i t j (mm!seg2) 2 2).- Para el caso especifico de t = 2 seg: VP i 2 j (mm/seg) y aP 0.5 i 2 j (mm/seg2) Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 120 _____________________________________________________________________ 3).- Cálculo de la curvatura: Si: K 1 C XY YX X 2 Y 2 3 2 Para: t = 2 seg K 2 1 * 2 2 * 1 1 4 2 3 0.0894 (1/mm) 1-73.- El mecanismo robótico gira alrededor de un eje vertical fijo a la vez que el brazo se alarga y se eleva.- En el instante dado, 30º , 10 grd / seg (cte ), l 0.5 m, l 0.2 m / seg , l 0.3 m / seg 2 y Usando 20 grd / seg (cte ) . coordenadas esféricas determine la velocidad y aceleración de la pieza P asida. Z er P1-73 e e Solución 1).- Orientación de los vectores unitarios e identificación de los parámetros que definen el movimiento en coordenadas esféricas (ver figura P1-73a): r 0.75 l 1.25 m 90º 60º r l 0.2 m / seg r l 0.3 m / seg O 10 * 180 0.175 m / seg 0 P1-73a 20 * 10 0.349 rad / seg 0 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 121 2).- Cálculo de la velocidad y aceleración de P: VP r er r e r sen e 0.2 er 1.25 * 0.175 e 1.25 * 0.349 sen e VP 0.2 er 0.219 e 0.378 e (m/seg) → VP 0.48 m/seg a P r r 2 r 2 sen 2 er 2r r 2 sen cos e 2r cos 2r sen e 0.3 1.25 * 0.175 2 er 2 * 0.2 * 0.175 1.25 * 0.349 2 sen60º cos 60º e a P 2 1.25 * 0.349 sen60º 2 *1.25 * 0.175* 0.349 cos 60º2 * 0.2 * 0.349 sen * e a P 0.47 er 0.136 e 0.045 e (m/seg2) → aP 0.49 m/seg2 1-74.- Una persona que está parado en el punto h sobre el perímetro de una plataforma en rotación observa el vuelo libre de una pelota B de béisbol. Para el instante mostrado la pelota está en el punto C y se mueve horizontalmente con una rapidez constante de 40 pies/seg hacia el eje de la plataforma giratoria, que se mueve con velocidad angular constante de 2 rad/seg. Calcule, para ese instante: a) la velocidad y aceleración de la pelota desde la perspectiva de la persona, y b) el radio de curvatura en el “plano horizontal” de la trayectoria de la bola respecto a la persona. h P1-74 Solución Observando el movimiento en el plano horizontal (ver figura P1-74a). 1).- Cálculo del movimiento angular del marco móvil ℜ, y velocidad y aceleración del punto base h. 2 k (rad/seg) y O R Y h' h C B V B = 40 pie/seg X 0 P1-74a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 122 _____________________________________________________________________ Vh rOh i 2 *10 i 20 i (m/seg) y a h 2 r j 4 *10 j 40 j (pie/seg2 ) 2).- Movimiento de la bola B respecto al marco móvil ℜ: rhC 5 j (pies) , VB ? y aB ? 3).- Cálculo de la velocidad y aceleración de la bola respecto al hombre.- De la velocidad y aceleración de la bola B respecto al marco inercial tierra: a).- Si: VB VB Vh x rhC VB VB Vh x rhC (1) Donde: VB 40 j (pie/seg) y x rhC 2 k x 5 j 10 i (pie/seg) En (1): VB 40 j 20 i 10 i 30 i 40 j (pie/seg) b).- Si: → VB 50 pie/seg a B a B a h 2 rhC 2 x VB → a B a B a h 2 rhC 2 x VB h (2) h Donde: a B 0 , 2 rhC 4 (5 j ) 20 j (pie/seg2) y 2 x VB 4 k x 30 i 40 j 160 i 120 j (pie/seg2) h En (2): a B 40 j 20 j 160 i 120 j 160 i 60 j (pie/seg2) → a B 170.88 pie/seg2 h 4).- Cálculo del radio de curvatura respecto a la persona en el plano horizontal: 1 Si: C VB x a B VB 3 Donde: VB x a B 30 i 40 j x 160 i 60 j 1800 k 6400 k 8200 k Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ 3 VB 123 125000 Luego: 1 C 8200 125000 C 15.24 pies 1-75.- En el instante que se ilustra, el brazo AB gira en torno del rodamiento fijo con una velocidad angular 1 = 2 rad/seg y una aceleración angular 1 = 6 rad/seg2. En el mismo instante, la varilla BD gira en relación con la varilla AB a 2 = 7 rad/seg, que se incrementa a 2 = 1 rad/seg2. Además, el collarín C se mueve sobre la varilla BD con una velocidad r = 2 pie/seg y una desaceleración r = 0.5 pie/seg2, ambas, medidas con relación con la varilla. Usando coordenadas cilíndricas en la varilla AB, determine la velocidad y aceleración del collarín en ese instante. A P1-75 Solución e D e eX B 1).- Orientación de los vectores unitarios de las coordenadas cilíndricas en AB (ver figura P1.75a): 2).- Cálculo del movimiento del marco móvil AB, de la velocidad y aceleración del punto base B: C AB 1 2 sen30º e cos 30º e AB e 1.732 e B' (rad/seg) AB 1 6 sen30º e cos 30º e AB 3 e 5.196 e A (rad/seg2) P1-75a Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA 124 _____________________________________________________________________ VB 1 x rB ' e 1.732 e x 2 e X 3.464 e 2 e (pie/seg) a B 1 x rB ' 12 rB ' 3 e 5.196 e x 2 e X 4 2 e X a B 10.392 e 6 e 8 e X (pie/seg2) 3).- Cálculo del movimiento de C respecto al marco móvil AB.a).- Identificación de los parámetros que definen el movimiento en AB: 30º 1 pie r 2 pie / seg 7 rad / seg r 0.5 pie / seg 2 1 rad / seg 2 b).- Movimiento de C: rBC e (pie) VC aC aC AB AB AB e e 2 e 7 *1 e 2 e 7 e (pie/seg) 2 e 2 e 0.5 1* 49 e 2 * 2 * 7 1*1 e 49.5 e 29 e (pie/seg2) 4).- Cálculo de la velocidad y aceleración de C en el marco inercial tierra: VC VB VC AB AB x rBC Donde: AB x rBC e 1.732 e x e 1.732 e X (pie/seg) Luego: VC 3.464 2 e 2 7 e 1.732 e X 1.464 e 9 e 1.732 e X (pie/seg) VC 9.281 pie/seg Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com) SOLUCIONARIO DE PROBLEMAS DE DINAMICA _____________________________________________________________________ aC a B a C AB AB x rBC AB x AB x rBC 2 AB x VC 125 AB Donde: AB x rBC 3 e 5.196 e x e 5.196 e X (pie/seg2) AB x AB x rBC e 1.732 e x 1.732 e X 3 e 1.732 e 2 AB x VC AB (pie/seg2) 2 e 3.464 e x 2 e 7 e 6.928 e X 14 e X 7.072 e X (pie/seg2) Luego: aC 10.392 49.5 3 e 6 29 1.732 e 8 5.196 7.072 e X aC 62.892 e 36.732 e 6.124 e X (pie/seg2) → aC 73.09 pie/seg2 Autor: Ing. VICTOR MANUEL MENACHO LOPEZ Document shared on www.docsity.com Downloaded by: johnnytodeep2307 (johnnytodeep2307@gmail.com)